Dominique Guinard and Vlad Trifa, Towards the Web of Things: Web Mashups for Embedded Devices
Dominique Guinard presents this paper. (You might wonder how I manage to both present it and blog about it, well this is thanks to Ghislain Fourny who wrote a summary of my talk).
After introducing a couple of smart objects and noticing that the audience is uncool as nobody has a Poken, Dominique asks how we are going to deal with the 1000+ smart objects each person is going to have within the next 5 to 10 years. Communicating with these objects could be made easier with Mash-ups.
The agenda will consist of a discussion of the Web of Things, the introduction of a Web-oriented architecture of the real world, the demonstration of two prototypes one of which is going to crash, and finally real-world Mash-ups.
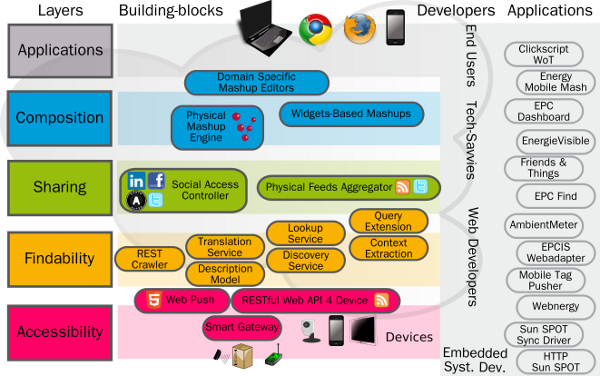
Architecture:
1. Resource design: each resource is accessed through a URL, e.g., https://webofthings.org/spots/2/sensors/light
2. Representation design: XHTML would be the default, JSON would be better for parsing and XML would be ideal for integration
3. Uniform interface: the HTTP protocol does the job with GET, PUT, DELETE, POST. HTTP headers tell what data is being sent, and HTTP bodies contain the data.
The integration could be done through a smart gateway which discovers the devices, understands their API and exposes them as a RESTful API. Dominique mentions that Nokia is going to introduce a home control center, which will, so he says, fortunately for his work be proprietary. As opposed to the integration with the smart gateway, a direct integration would consist of smart objects having all a RESTful API.
Dominique attempts a demonstration. He turns on a sensor which gets an IP address. Two LEDs indicate that it is on the web. With an AJAX website developed with the Google Web Toolkit, Dominique selects the sensor URL and explores its services, described using JSON.
The goal of the next example is to integrate smart plugs (Ploggs) thanks to the smart gateway. Dominique plugs one of them to his smart phone, the other one to his computer and starts the gateway. Using three rounds of bluetooth, the gateway identifies all phones, well, plugs (as of course everybody in the room kindly turned off their phones upon Dominique’s request). Then Dominique navigates to the gateway URL and notices with surprise that his computer consumes 80W.
In order to compose real-world Mash-ups using these devices and this architecture, it is possible to use Yahoo pipes, Microsoft Popfly, etc. For the example, he uses his own program showing diagrams of the consumption of his devices. After 20 seconds, the data are plotted and Dominique notices that his smart phone only consumes a cool 4W.
Eventually, he introduces a physical Mash-up with an ambient energy meter, which is a Mash-up made of Ploggs, Sun Spots and gateways.
Dominique concludes by considering REST as a suitable approach for small embedded applications, although it would be nice to have asynchronous mechanisms so that they are investigating protocols like XMPP. Mash-up editors would also be nice to have.
The video of the prototype in this presentation is available on: http://www.youtube.com/watch?v=1H49H1pPSBI
The presentation is available below:
Bibtex:
@inproceedings{dguinard:wotMashups:2009,
author = {Dominique Guinard and Vlad Trifa},
title = {Towards the Web of Things: Web Mashups for Embedded Devices},
year = {2009},
month = apr,
booktitle = {Workshop on Mashups, Enterprise Mashups and Lightweight Composition on the Web (MEM 2009), in proceedings of WWW (International World Wide Web Conferences)},
address = {Madrid, Spain}
}



Kantorbola link alternatif login terbaru 2025 . Kunjungi link resmi situs kantor bola untuk melakukan permainan dan pendaftaran
http://ww31.asusnetwork.net/__media__/js/netsoltrademark.php?d=community.orbitonline.com%2Fusers%2Fsashaledford072%2F
Узнайте стоимость диплома высшего и среднего образования и процесс получения
Как избежать рисков при покупке диплома колледжа или ПТУ в России
Возможности выигрыша в онлайн казино, где возможности бесконечны.
Попробуйте свои силы вместе с нами, и ощутите атмосферу азарта и волнения.
Выберите свое любимое казино онлайн, и начните играть уже сегодня.
Почувствуйте атмосферу настоящего казино в режиме онлайн, не тратя время на поездки.
Играйте в увлекательные игры с высокими коэффициентами выигрыша, и покажите всем, кто здесь главный.
Коммуницируйте и соревнуйтесь с игроками со всего мира, и покажите свои лучшие результаты.
Начните играть и получите ценные подарки, которые принесут вам еще больше радости и азарта.
Играйте и наслаждайтесь азартом в каждой ставке, и погрузитесь в мир бесконечных перспектив.
Станьте частью казино онлайн и получите доступ к эксклюзивным играм, с минимум затрат времени и усилий.
онлайн казино [url=https://casino-on-line.by/]казино онлайн беларусь[/url] .
купить диплом в майкопе
купить диплом прораба [url=https://4russkiy365-diplomy.ru/]4russkiy365-diplomy.ru[/url] .
[url=https://caliente.directorio-de-casinos-mx.com]https://caliente.directorio-de-casinos-mx.com[/url]
Download apk file online casino caliente – win now!
http://www.caliente.directorio-de-casinos-mx.com
[url=https://caliente.directorio-de-casinos-mx.com]https://caliente.directorio-de-casinos-mx.com[/url]
Upload latest version of the application casino caliente – win right now!
http://www.caliente.directorio-de-casinos-mx.com
[url=https://winner.directorio-de-casinos-mx.com/]winner.directorio-de-casinos-mx.com[/url]
Upload latest version of the application online casino winner – win right now!
winner casino
купить диплом юриспруденция [url=https://2orik-diploms.ru/]2orik-diploms.ru[/url] .
Montenegro Herceg novi Montenegro immobilien von privat kaufen
Легальная покупка диплома ПТУ с сокращенной программой обучения
купить диплом в перми купить диплом в перми .
Покупка диплома о среднем полном образовании: как избежать мошенничества?
Быстрое обучение и получение диплома магистра – возможно ли это?
Покупка диплома о среднем полном образовании: как избежать мошенничества?
нові фільми онлайн історичні фільми 2003 дивитися онлайн
кращі фільми 2017 онлайн дивитися фільм безкоштовно детективи
дивитися кіно онлайн комедії фільми онлайн безкоштовно історичні
диплом о высшем купить
список мфо выдающих займы на карту список МФО
thc vape shop in prague kush delivery in prague
порно с шурыгиной https://shuriginadiana.ru
купить диплом в сургуте купить диплом в сургуте .
лучшие фильмы 2009 смотреть онлайн фильмы онлайн HD на телефоне
новинки кино онлайн комедии лучшие фильмы 2005 смотреть онлайн
Полезные советы по покупке диплома о высшем образовании без риска
Строительный портал https://bastet.com.ua ваш путеводитель в мире стройки! Подборка лучших материалов, контакты мастеров, проекты и лайфхаки. Создавайте уют и красоту с нашим сервисом!
Как оказалось, купить диплом кандидата наук не так уж и сложно
Нужны деньги срочно небус займы – ваш быстрый выход! Подайте заявку из любого места, получите деньги в течение нескольких минут. Удобно, прозрачно, без скрытых комиссий.
Финансовые трудности? Решите их за минуты быстро деньги с моментальным переводом на карту. Оформление онлайн, простые условия и никакого лишнего стресса. Ваш надежный финансовый помощник!
search for crypto wallet
Solutions for Monitoring USDT for Embargoes and Transfer Clarity: AML Approaches
In the modern domain of cryptocurrencies, where expedited deals and obscurity are becoming the usual case, tracking the lawfulness and integrity of operations is crucial. In recognition of greater regulatory scrutiny over money laundering and terrorism funding, the need for robust means to verify transactions has become a critical concern for digital asset users. In this text, we will discuss available solutions for monitoring USDT for sanctions and deal cleanliness.
What is AML?
Money Laundering Prevention actions refer to a collection of legal protocols aimed at stopping and discovering money laundering activities. With the increase of crypto usage, AML standards have become particularly crucial, allowing users to operate digital currencies with assurance while minimizing hazards associated with embargoes.
USDT, as the arguably the recognized stablecoin, is extensively used in various deals across the globe. Nonetheless, using USDT can entail several threats, especially if your resources may connect to ambiguous or criminal operations. To reduce these concerns, it’s imperative to take make use of tools that check USDT for sanctions.
Available Services
1. Address Verification: Employing specialized tools, you can inspect a specific USDT address for any ties to prohibited catalogs. This facilitates uncover potential ties to illicit operations.
2. Transaction Conduct Analysis: Some offerings provide evaluation of deal records, crucial for evaluating the transparency of financial transactions and uncovering potentially dangerous transactions.
3. Surveillance Services: Specialized monitoring solutions allow you to track all deals related to your account, facilitating you to promptly identify suspicious actions.
4. Hazard Documents: Certain tools provide detailed concern evaluations, which can be helpful for stakeholders looking to guarantee the reliability of their resources.
Regardless of whether you are overseeing a substantial investment or executing small deals, abiding to AML practices supports avoid legal repercussions. Employing USDT validation services not only protects you from economic losses but also aids to creating a stable environment for all economic actors.
Conclusion
Verifying USDT for restrictive measures and deal integrity is becoming a compulsory process for anyone enthusiastic to remain within the legal framework and uphold high standards of openness in the cryptocurrency domain. By collaborating with reliable services, you not only defend your holdings but also help to the joint mission in countering illicit finance and terrorist financing.
If you are set to start leveraging these tools, review the accessible platforms and select the service that most fits your requirements. Remember, data is your advantage, and swift transaction assessment can save you from numerous problems in the long run.
Tools for Monitoring USDT for Embargoes and Deal Cleanliness: Anti-Laundering Strategies
In the modern domain of crypto assets, where rapid exchanges and obscurity are becoming the norm, tracking the validity and clarity of transactions is crucial. In consideration of amplified government scrutiny over money laundering and financing of terrorism, the necessity for efficient tools to validate operations has become a significant issue for cryptocurrency users. In this article, we will discuss existing offerings for checking USDT for prohibitions and deal cleanliness.
What is AML?
Anti-Money Laundering strategies refer to a series of regulatory steps aimed at curtailing and identifying money laundering activities. With the rise of cryptocurrency usage, AML strategies have become particularly critical, allowing participants to manage digital resources confidently while lessening risks associated with sanctions.
USDT, as the preeminent recognized stablecoin, is widely used in diverse operations across the globe. Nevertheless, using USDT can present several dangers, especially if your funds may tie to non-transparent or illicit maneuvers. To mitigate these concerns, it’s essential to take leverage of offerings that verify USDT for embargoes.
Available Services
1. Address Authentication: Using specialized tools, you can inspect a particular USDT address for any ties to restrictive registries. This aids uncover potential ties to unlawful behaviors.
2. Operation Action Analysis: Some tools offer assessment of operation records, crucial for measuring the transparency of fund movements and uncovering potentially dangerous activities.
3. Surveillance Tools: Professional monitoring services allow you to track all exchanges related to your account, enabling you to promptly spot questionable conduct.
4. Concern Records: Certain tools make available detailed risk reports, which can be valuable for stakeholders looking to ensure the reliability of their holdings.
Whether of if you are overseeing a large resource or conducting small deals, abiding to AML practices ensures evade legal repercussions. Employing USDT authentication offerings not only protects you from financial declines but also helps to forming a stable environment for all economic players.
Conclusion
Verifying USDT for sanctions and deal cleanliness is becoming a compulsory action for anyone enthusiastic to stay within the law and maintain high levels of clarity in the crypto industry. By engaging with reliable tools, you not only defend your investments but also help to the common goal in fighting illicit finance and terror financing activities.
If you are set to start leveraging these services, explore the available platforms and pick the one that most suitably aligns with your preferences. Keep in mind, data is your strength, and swift operation validation can save you from a variety of difficulties in the time ahead.
Строительный портал https://bms-soft.com.ua для тех, кто строит и ремонтирует! Узнайте о трендах, найдите мастеров, подберите материалы и получите ценные рекомендации.
Откройте для себя лучшие сервера линейдж! Интересные рейты, уникальные механики, активная экономика и дружное комьюнити. Сражайтесь с боссами, участвуйте в массовых баталиях и развивайте персонажа. Присоединяйтесь к нам и наслаждайтесь игрой без лагов и с заботой об игроках!
Before forming a final opinion about something, it is useful to consider different points of view https://000-google-09.s3.eu-north-1.amazonaws.com/id-10.html
Like 4436
Everyone has their own reasons for acting the way they do, even if these reasons are not obvious to others https://000-google-09.s3.eu-north-1.amazonaws.com/id-10.html
Like 6821
Anti-money laundering (AML)
Services for Verifying USDT for Prohibitions and Transfer Purity: Money Laundering Prevention Approaches
In the current environment of crypto assets, where quick trades and privacy are becoming the standard, supervising the legality and purity of processes is vital. In view of greater official examination over financial misconduct and terrorism financing activities, the requirement for reliable tools to validate operations has become a major concern for digital asset users. In this write-up, we will analyze available offerings for assessing USDT for prohibitions and operation integrity.
What is AML?
Money Laundering Prevention practices refer to a group of legal actions aimed at stopping and detecting financial misconduct activities. With the increase of virtual currency usage, AML standards have become especially essential, allowing participants to manage digital assets securely while reducing risks associated with sanctions.
USDT, as the most well-known stablecoin, is commonly used in various transactions worldwide. Nonetheless, using USDT can present several dangers, especially if your resources may connect to non-transparent or unlawful transactions. To minimize these threats, it’s imperative to take benefit of solutions that verify USDT for embargoes.
Available Services
1. Address Authentication: Leveraging specific tools, you can verify a particular USDT address for any ties to restrictive catalogs. This aids identify potential ties to illegal activities.
2. Transaction Conduct Examination: Some offerings extend analysis of transfer records, significant for judging the clarity of fund transactions and spotting potentially threatening conduct.
3. Observation Solutions: Specialized monitoring services allow you to monitor all deals related to your account, enabling you to rapidly detect questionable conduct.
4. Hazard Documents: Certain tools provide detailed threat summaries, which can be beneficial for participants looking to confirm the soundness of their holdings.
No matter of if you are handling a large fund or executing small deals, following to AML practices assists evade legal repercussions. Using USDT authentication offerings not only shields you from economic damages but also contributes to establishing a safe environment for all business participants.
Conclusion
Monitoring USDT for embargoes and deal purity is becoming a required measure for anyone eager to continue within the law and maintain high standards of transparency in the cryptocurrency field. By working with dependable tools, you not only safeguard your holdings but also contribute to the collective mission in fighting dirty money and financing of terrorism.
If you are ready to start employing these offerings, explore the offered options and choose the solution that most suitably fits your preferences. Keep in mind, information is your advantage, and swift operation assessment can shield you from many issues in the future.
Anti-money laundering (AML)
Services for Checking USDT for Restrictive Measures and Transfer Cleanliness: Anti-Laundering Measures
In the modern environment of digital currencies, where expedited trades and privacy are becoming the usual case, tracking the legality and integrity of operations is crucial. In recognition of greater official examination over dirty money and financing of terrorism, the demand for robust instruments to verify deals has become a significant matter for crypto users. In this piece, we will analyze existing solutions for verifying USDT for sanctions and transfer cleanliness.
What is AML?
Money Laundering Prevention practices refer to a set of compliance measures aimed at hindering and identifying illicit finance activities. With the rise of crypto usage, AML practices have become particularly crucial, allowing participants to handle digital currencies with assurance while lessening perils associated with sanctions.
USDT, as the widely regarded as the well-known stablecoin, is commonly used in diverse deals across the globe. Yet, using USDT can entail several threats, especially if your monies may associate to non-transparent or illegal operations. To lessen these risks, it’s imperative to take benefit of services that check USDT for embargoes.
Available Services
1. Address Confirmation: Employing dedicated tools, you can verify a specific USDT address for any links to prohibited directories. This facilitates detect potential links to illegal operations.
2. Deal Action Assessment: Some services extend scrutiny of deal chronology, significant for judging the clarity of fund movements and detecting potentially risky activities.
3. Observation Tools: Specialized monitoring solutions allow you to track all exchanges related to your address, enabling you to rapidly detect questionable actions.
4. Risk Records: Certain solutions extend detailed concern reports, which can be valuable for investors looking to confirm the trustworthiness of their resources.
Regardless of if you are overseeing a substantial resource or performing small operations, adhering to AML guidelines supports prevent legal repercussions. Using USDT verification tools not only defends you from monetary setbacks but also aids to creating a stable environment for all economic stakeholders.
Conclusion
Checking USDT for sanctions and deal purity is becoming a compulsory action for anyone motivated to continue within the law and uphold high standards of visibility in the virtual currency sector. By interacting with credible solutions, you not only safeguard your resources but also help to the joint initiative in combating money laundering and terrorist financing.
If you are ready to start utilizing these services, explore the offered services and pick the service that most aligns with your demands. Keep in mind, data is your power, and timely transfer verification can shield you from a variety of difficulties in the coming times.
Biography of Argentine footballer Paulo Dybala https://paulo-dybala-bd.com personal life, tattoos on the body, wedding with his wife Oriana Sabatini.
Welcome to the Mohamed Salah https://mohamed-salah-en.com fansite! Find out everything about the Liverpool football great and the Egyptian national team. Goals, achievements, stats – it’s all here!
Диплом вуза купить официально с упрощенным обучением в Москве
Biography of Dutch footballer https://xavi-simons-bd.com midfielder for Paris Saint-Germain and the Netherlands national team Xavi Simons. Sports career, playing for RB Leipzig and Barcelona, ??participation in Euro 2024, achievements. Personal life, girlfriend, latest news in 2024.
диплом на заказ стоимость диплом на заказ стоимость .
Find out everything about Gareth Bale https://gareth-bale-bd.com his career, achievements and personal life on the official fan site!
Xtreme Gaming: The Elite of Dota 2 xtreme-gaming-dota2.com/. Unrivaled champions who have conquered the heights of eSports. Their fame thunders throughout the world.
купить диплом в донском купить диплом в донском .
Строительный и архитектурный портал https://intertools.com.ua все самое интересное о строительстве и архитектуре – новости архитектуры и строительства, обзоры и аналитика.
The legendary Dota 2 team http://team-heroic-dota2.com Team Heroic. Multiple champions and fan favorites. Virtuoso play and exciting matches.
Официальная покупка диплома ПТУ с упрощенной программой обучения
купить диплом техникума ссср в красноярске [url=https://4russkiy365-diplomy.ru/]4russkiy365-diplomy.ru[/url] .
Службы откачки канализации в Слуцке, быстро.
Специализированная откачка канализации в Слуцке, по выгодной цене.
Профессиональные услуги по откачке канализации в Слуцке, с опытными специалистами.
Откачка канализации в Слуцке: качественно и надежно, со скидкой для постоянных клиентов.
Экстренная откачка канализации в Слуцке, по круглосуточно.
Оперативная откачка канализации в Слуцке: круглосуточно, с гарантией качества.
Услуги по откачке канализации в Слуцке, с гарантией качества работы.
Откачка канализации в Слуцке: вызовите специалистов, с быстрым выездом на объект.
Служба откачки канализации в Слуцке: быстрое решение проблем, с выездом в течение часа.
откачка канализации Слуцк откачка подвалов Слуцк .
Покупка диплома о среднем полном образовании: как избежать мошенничества?
Профессиональная откачка канализации в Слуцке, эффективно.
Оперативная откачка канализации в Слуцке, с использованием современного оборудования.
Забудьте о проблемах с канализацией в Слуцке, с опытными специалистами.
Эффективная откачка канализации в Слуцке, по выгодным условиям.
Откачка канализации в Слуцке: вызовите профессионалов, по круглосуточно.
Профессиональная откачка канализации в Слуцке: решение вопроса быстро, с гарантией качества.
Услуги по откачке канализации в Слуцке, по выгодной стоимости.
Профессиональная откачка канализации в Слуцке: надежно и оперативно, с гарантией качества.
Служба откачки канализации в Слуцке: быстрое решение проблем, с выездом в течение часа.
откачка канализации Слуцк [url=https://kufar.by/item/250777013/]откачка подвалов Слуцк[/url] .
Процесс получения диплома стоматолога: реально ли это сделать быстро?
BEKU4D
system surveillance pro cctv video analysis software free
купить диплом в калининграде
Натуральные молочные продукты https://gastrodachavselug2.ru свежесть и качество с заботой о вашем здоровье! Широкий выбор: молоко, творог, сметана, сыры. Только натуральные ингредиенты, без консервантов и добавок.
BEKU4D
thc weed in prague cannafood shop in prague
okada4d
thc vape in prague cannafood for sale in prague
hash in prague buy weed in prague
thc vape in prague 420 day in prague
cannabis delivery in prague cannabis shop in prague
okada4d
buy hash in prague https://prague-drugstore.site
praha 420 weed in prague
cali weed shop in prague hash in prague
buy marijuana in prague https://pragueshop.site
hemp in prague 420 day in prague
Быстрая покупка диплома старого образца: возможные риски
Диплом пту купить официально с упрощенным обучением в Москве
Biography of footballer Kylian Mbappe kylian-mbappe personal life, rumors of an affair with Alicia Aylis and Ines Rau. Career, statistics and salary at Paris Saint-Germain, victory at the World Cup and other achievements of the striker.
Biography of football player Neymar neymar-bd.com personal life, relationships and rumors of romances with Katya Safarova, Natalia Barulich, the birth of a son and Bruna’s last girlfriend, the birth of daughters.
Biography of Belgian footballer http://kevin-de-bruyne-bd.com Kevin De Bruyne (Kevin De Bruyne): personal life, relationship with his wife, conflict with Thibaut Courtois over his girlfriend Caroline.
Biography of football player Jude Bellingham https://jude-bellingham-bd.com personal life, relationship with girlfriend Laura. Player statistics in the Real Madrid team, matches for the England national team with Harry Kane, the athlete’s salary, conflict with Mason Greenwood.
Biography of football player Luis Alberto Suarez http://luis-suarez-bd.com personal life, daughter, wife, children, height. Leaving the club Atletico Madrid, career in Barcelona and Liverpool, goal statistics.
Zico is a legendary Brazilian footballer https://zico.com.az known as “White Pele”. His talent, technique and passion for the game made him an icon of Brazilian football, and his contributions to the sport continue to inspire new generations.
Rudy Gobert https://rudy-gobert-az.com is a French center and one of the best defenders in the NBA, nicknamed “The French Tower.” A three-time Defensive Player of the Year, he inspires with his skills and commitment to excellence.
George Best https://george-best.com.az is a brilliant footballer and a shining symbol of the 1960s, known for his talent and turbulent life. He left an indelible mark on football by combining success on the pitch with the tragedy of personal struggle.
Nikola Jokic nikola-jokic-az.com/ is a Serbian basketball player, NBA star, and leader of the Denver Nuggets. Known for his unique style of play, court vision, and leadership, he has become a role model for a new generation of centers.
Luka Doncic lukadoncic is a Slovenian basketball player, the leader of the Dallas Mavericks team and one of the main stars of the NBA. His unique playing style, records and influence have made him a symbol of European success in world basketball.
FOSIL4D
FOSIL4D
Разнообразие фурнитуры для плинтуса, найдите идеальный вариант.
Надежные элементы для плинтуса, гарантия долгого срока службы.
Простота установки элементов плинтуса, для быстрой установки.
Модные элементы для украшения плинтуса, выделитесь из общей массы.
Фурнитура для плинтуса из экологически чистых материалов, для заботы об окружающей среде.
Тренды в оттенках для декора плинтуса, выберите подходящий вам вариант.
Уникальные элементы для стильного плинтуса, выразите свою индивидуальность через дизайн.
Советы по выбору фурнитуры для плинтуса, чтобы сделать правильный выбор.
Стильные детали для украшения плинтуса, выдержите общий стиль в каждой детали.
Изысканные решения для отделки плинтуса, сделайте свой дом роскошным и элегантным.
фурнитура для плинтуса мдф фурнитура для плинтуса мдф .
Широкий выбор фурнитуры для плинтуса, подберите под свой интерьер вариант.
Прочные материалы для плинтуса, не подведут вас в эксплуатации.
Легкость сборки плинтуса, без лишних усилий.
Модные элементы для украшения плинтуса, сделайте дом уютным и стильным.
Эко-варианты элементов для плинтуса, для заботы об окружающей среде.
Популярные цветовые решения для фурнитуры плинтуса, подчеркните цветовую гамму своего интерьера.
Уникальные элементы для стильного плинтуса, привнесите уникальность в интерьер.
Советы по выбору фурнитуры для плинтуса, для долгосрочного использования.
Декоративные элементы для фурнитуры плинтуса, добавьте шарм вашему интерьеру.
Изысканные решения для отделки плинтуса, для создания аристократичной атмосферы.
производитель фурнитуры производитель фурнитуры .
купить диплом москва
Looking forward to your next post. Keep up the good work!
鉅城娛樂城作為亞太區知名線上娛樂平台,以豐富多元的遊戲內容及優質服務贏得玩家信賴。平台通過TST技術測試及GLI系統認證,確保遊戲公平性。目前推出首存1000送1000優惠活動,最高回饋可達20萬,並提供日日續儲10%的回饋金。平台提供真人百家、棋牌、老虎機、體育電競及彩票等多樣化遊戲選擇,讓玩家享受如臨現場的娛樂體驗。
鉅城娛樂城:亞太區知名線上娛樂平台
鉅城娛樂城作為亞太區最受歡迎的線上娛樂平台之一,以其豐富多元的遊戲內容和卓越的服務品質贏得了廣大玩家的信賴。該平台不僅擁有一系列令人 excited 的遊戲,還致力於為玩家提供公平、公正的遊戲環境。
公平遊戲保障
鉅城娛樂城的遊戲公平性通過TST技術測試及GLI系統認證確保,使玩家在遊玩過程中完全無需擔心遊戲的公正問題。這些認證保證了每一場比賽及遊戲的隨機性和透明度,進一步增強了玩家的信心。
優惠活動
目前,鉅城娛樂城推出了首存1000送1000的優惠活動,這讓新玩家能夠在註冊後,迅速享受雙倍的存款金額,提升遊戲體驗。此外,平台最高回饋可達20萬,讓玩家在參與遊戲時享受到更多的利潤。值得注意的是,鉅城娛樂城還提供日日續儲10%的回饋金,進一步增強了玩家的參與熱情。
遊戲選擇
鉅城娛樂城平台提供多樣化的遊戲選擇,包括真人百家、棋牌、老虎機、體育電競及彩票等,讓玩家可以依照自己的興趣和需求選擇遊戲。無論是喜愛刺激的百家 blackjack,還是希望體驗策略與運氣的棋牌遊戲,鉅城娛樂城皆能滿足每位玩家的期望,並提供如臨現場的娛樂體驗。
總結
總而言之,鉅城娛樂城憑藉其卓越的遊戲內容和專業的客戶服務,已成為亞太區線上娛樂的不二之選。公正的遊戲環境、誘人的優惠活動及多樣的遊戲選擇,吸引了無數玩家的目光。無論你是新手還是老玩家,鉅城娛樂城都能帶給你一段難忘的遊戲旅程。
deneme bonusu veren siteler yeni: deneme bonusu veren yeni siteler – deneme bonusu veren siteler
貴公子娛樂城是一個新穎且便利的線上娛樂平台,其主打的快速註冊流程讓玩家可以即刻開始遊戲,而無需經歷繁瑣的手續。同時,平台提供多元的支付選項,包括LINE PAY、信用卡及MyCard等,方便玩家根據自己的需求選擇最適合的方式進行充值。此外,貴公子娛樂城的每日紅包系統和VIP等級紅利機制,更讓玩家能夠持續享受額外的回饋與獎勵,增添了遊戲的吸引力。對於尋求快速進入遊戲並享受穩定服務的玩家而言,貴公子娛樂城無疑是一個值得嘗試的選擇!
Всё для строительства и ремонта https://artpaint.com.ua на одном портале: советы экспертов, обзоры материалов, расчет сметы и готовые решения для вашего дома или бизнеса.
Портал для строительства https://6may.org и ремонта: полезные советы, современные материалы, проекты и идеи. Все, что нужно для воплощения ваших задумок – от фундамента до крыши.
Портал о строительстве https://aziatransbud.com.ua статьи, видео, инструкции, каталоги материалов и инструментов. Советы для дома и бизнеса. Легко строить, удобно ремонтировать!
Все об озеленении и благоустройстве https://bathen.rv.ua Ландшафтный дизайн, проекты садов, террас и парков. Идеи для создания зеленых зон, подбор растений и профессиональные услуги для вашего участка.
Студия дизайна интерьера https://bconline.com.ua и архитектуры: создаем уникальные проекты для квартир, домов и коммерческих пространств. Эстетика, функциональность и индивидуальный подход – в каждом решении.
Разработка и продвижение сайтов https://magikfox.ru в Москве и регионах России от диджитал агентства MagicFox. Лучшие цены на рускрутку. Сделаем продающий сайт на Битрикс и обеспечим высокий уровень продаж.
тренболон стероид купить https://drags-masses.com
гидрозатвор для трапов канализации srti ru
Ваш путеводитель в мире строительства https://dcsms.uzhgorod.ua идеи, планы, пошаговые инструкции и лучшие материалы. Узнайте, как построить дом мечты или обновить интерьер.
Профессиональный портал для строительства https://blogcamp.com.ua проекты, материалы, расчеты, советы и вдохновение. Все, чтобы ваш ремонт или стройка были успешными.
Хотите построить дом https://donbass.org.ua или сделать ремонт? Здесь вы найдете всё: инструкции, идеи, современные технологии и проверенные решения. Портал для тех, кто строит.
Делайте ремонт https://esi.com.ua и стройте легко! Лучшие советы мастеров, подбор инструментов, инструкции и сметы. Мы поможем справиться с любой задачей.
Все для строителей и мастеров https://dki.org.ua актуальные технологии, практические советы, строительные материалы и проекты. Простые решения для сложных задач!
Создайте дом своей мечты https://intellectronics.com.ua На нашем портале вы найдете идеи, инструкции и новейшие технологии для ремонта и строительства.
Станьте мастером https://fmsu.org.ua своего дела! Портал для тех, кто хочет строить и ремонтировать качественно и выгодно.
Купить диплом магистра оказалось возможно, быстрое обучение и диплом на руки
九州平台針對新會員推出168元的免費體驗金活動。這項活動的特點是無需滿足投注要求,新會員註冊 後即可使用。會員可以藉此機會體驗平台上的各種遊戲選項,包括電子遊戲、真人對戰等多樣娛樂內容。
相較於市面上其他平台,這項活動的主要優勢在於其簡單的申請流程和零門檻要求。一般平台的體驗金活動往往會設定投注金額要求,但此活動讓會員能更自由地體驗平台服務。
диплом о среднем техническом образовании купить
九州娛樂城
九州娛樂城作為線上娛樂平台的領導品牌,不斷推出創新服務及優惠活動。近期推出的168元體驗金活動,讓新會員免費體驗平台特色。九州娛樂以玩家體驗為核心,提供多元化的遊戲選擇,包括電子遊戲、真人對戰等娛樂內容。平台以穩定、安全的系統建立口碑,加上專業的客服團隊,打造全方位的娛樂環境。現在註冊加入九州娛樂城,立即享受精彩遊戲體驗。
lisanslД± bahis sitesi http://sweetbonanza25.com/# sweet bonanza oyna
casino tГјrkiye
九州娛樂
九州娛樂城作為線上娛樂平台的領導品牌,不斷推出創新服務及優惠活動。近期推出的168元體驗金活動,讓新會員免費體驗平台特色。九州娛樂以玩家體驗為核心,提供多元化的遊戲選擇,包括電子遊戲、真人對戰等娛樂內容。平台以穩定、安全的系統建立口碑,加上專業的客服團隊,打造全方位的娛樂環境。現在註冊加入九州娛樂城,立即享受精彩遊戲體驗。
Архитектура и дизайн интерьера https://it-cifra.com.ua под ключ: современные решения, индивидуальный подход и гармония стиля и функциональности. Создаем пространство вашей мечты!
Найдите все для ремонта https://keravin.com.ua и строительства! Уникальные идеи, пошаговые инструкции и рекомендации специалистов на одном портале.
Мы помогаем строить https://juglans.com.ua лучше! Советы, проекты, новейшие материалы и технологии для вашего ремонта или строительства.
Ландшафтный дизайн https://kinoranok.org.ua и благоустройство для дома, офиса или парка. Профессиональные советы, подбор растений и реализация уникальных зеленых проектов.
Стройте с комфортом https://mr.org.ua полезные советы, новейшие технологии, пошаговые инструкции и проекты – всё для вашего удобства.
Ваш путеводитель в мире строительства https://mtbo.org.ua полезные рекомендации, готовые проекты и современные решения для любых задач.
Решили строить или делать ремонт https://msc.com.ua Мы подскажем, как выбрать лучшие материалы, спланировать бюджет и воплотить все задумки.
Все секреты https://mramor.net.ua строительства в одном месте! Советы экспертов, подбор материалов и готовые проекты для вдохновения.
Всё для успешного строительства https://newboard-store.com.ua и ремонта на одном портале! Мы собрали актуальную информацию, идеи и инструкции для вашего удобства. Заходите и стройте с нами!
Строительство без лишних вопросов https://okna-k.com.ua наш портал – кладезь информации о современных материалах, технологиях и лучших решениях для дома, дачи или офиса.
Информация о стройке https://purr.org.ua без лишних сложностей! Наш портал поможет выбрать материалы, узнать о технологиях и сделать ваш проект лучше.
firm registering in montenegro setting up a company in Montenegro
Ваш путеводитель в строительстве https://quickstudio.com.ua Ищите материалы, технологии или советы – всё это есть на нашем портале. Стройте с комфортом!
1win. com 1win bet download
1win aviator predictor 1win website
Вавада предлагает букмекер Вавада на любой вкус! Здесь вы найдете ставки на футбол, теннис, баскетбол, киберспорт и многое другое. Широкий выбор событий, удобный интерфейс и выгодные коэффициенты делают платформу идеальной как для новичков, так и для опытных игроков. Начните свой путь в ставках уже сегодня!
Всё, что нужно знать о металлах https://metalprotection.com.ua от их свойств до применения в различных отраслях. Обзоры, советы, новости и информация о производителях для вашего удобства.
Всё для вашего ремонта https://reklama-region.com и строительства в одном месте! Практичные советы, современные решения и актуальная информация для успешного проекта.
Ищете проверенные строительные советы https://rus3edin.org.ua Наш портал поможет выбрать материалы, спланировать проект и сделать всё на высшем уровне.
Хотите построить дом https://samozahist.org.ua или сделать ремонт? На нашем портале вы найдёте лучшие решения и вдохновение для вашего проекта.
программа производственного контроля отходы Москва https://ppk-213.ru
Строительный портал https://sinergibumn.com для тех, кто хочет знать больше о строительстве. Актуальные идеи, проверенные технологии и вдохновение для любого проекта.
Всё о дизайне интерьера https://sculptureproject.org.ua в одном месте! Узнайте, как создать уютное, стильное и функциональное пространство, которое будет радовать каждый день.
Хотите стильный интерьер https://sitetime.kiev.ua Наш портал предлагает уникальные идеи, профессиональные рекомендации и примеры лучших дизайн-проектов.
Экспертный строительный портал https://smallbusiness.dp.ua для вашего проекта! Советы, новинки и инструкции для тех, кто хочет сделать всё идеально.
Официальный сайт https://luckyjetonewins.ru , где вы найдете актуальное зеркало и промоды на Лаки Джет.
Как выбрать идеальную входную металлическую дверь, которая прослужит долгие годы.
Лучшие магазины с широким выбором входных металлических дверей.
Советы по избежанию ошибок при покупке металлической входной двери.
Почему стоит выбрать металлическую входную дверь.
дверь металлическая входная цена входная дверь .
Как выбрать между дверью одного бренда и дверью другого.
TU娛樂城
TU娛樂城擁有國際級的SGS服務認證,是首家獲得7星級認證的娛樂平台。每日提供近千場體育賽事直播,並設有真人、彩票、電子遊戲等多元娛樂選項。平台採用128位加密技術,打造安全可靠的服務環境。多端支援包含Web、H5及iOS、Android原生App,讓會員能隨時享受專業服務體驗。
Lipozem is a dietary supplement uniquely designed to promote healthy weight management and boost metabolic performance.
TU娛樂城擁有國際級的SGS服務認證,是首家獲得7星級認證的娛樂平台。每日提供近千場體育賽事直播,並設有真人、彩票、電子遊戲等多元娛樂選項。平台採用128位加密技術,打造安全可靠的服務環境。多端支援包含Web、H5及iOS、Android原生App,讓會員能隨時享受專業服務體驗。
Найдите всё о строительстве https://srk.kiev.ua и ремонте на нашем портале. Полезные статьи, актуальные технологии и лучшие практики ждут вас.
Строительный портал https://sushico.com.ua для профессионалов и новичков: от выбора материалов до готовых проектов. Легко найти подрядчиков, изучить современные технологии и воплотить идеи в жизнь!
Планируете стройку https://texha.com.ua или ремонт? У нас вы найдёте проверенных специалистов, инструкции, материалы и проекты на любой вкус. Всё для комфортного строительства!
Преобразите ваш дом https://vineyardartdecor.com вместе с нами! На портале вы найдёте свежие идеи, советы по планировке и материалы для создания идеального интерьера.
Всё о строительстве https://valkbolos.com и ремонте на одном портале! Гид по материалам, обзор инструментов, советы по дизайну и подбор подрядчиков. Создавайте дом своей мечты!
Секреты успешной покупки входной металлической двери, идеально впишется в интерьер.
Лучшие магазины с широким выбором входных металлических дверей.
Советы по избежанию ошибок при покупке металлической входной двери.
5 основных причин купить металлическую входную дверь.
входная дверь дверь металлическая .
Сравнение входных металлических дверей различных брендов.
Планируете ремонт или строительство https://vodocar.com.ua У нас всё, что нужно: от инструкций и советов до подрядчиков и обзоров материалов. Стройте с нами!
Ремонт и строительство https://sota-servis.com.ua легко! Здесь вы найдёте инструкции, рекомендации, материалы и специалистов для успешного выполнения ваших задач.
Ваш гид в мире строительства https://vitamax.dp.ua и ремонта! Обзоры, практические советы, дизайн-идеи и подбор профессионалов для реализации любых проектов.
Полный справочник по строительству https://stroy-portal.kyiv.ua и ремонту: советы, инструкции, дизайн-решения и помощь с выбором материалов и подрядчиков.
Лучшие советы по строительству https://stroysam.kyiv.ua и ремонту на одном сайте! Найдите вдохновение, изучите обзоры и воплотите свои идеи с профессиональной помощью.
Сделайте ремонт https://tfsm.com.ua мечты с нашим сайтом! Советы, инструкции, рейтинг специалистов и новинки строительного рынка для вашего удобства.
Простые решения для ремонта https://teplo.zt.ua и строительства! Идеи дизайна, рекомендации экспертов и проверенные материалы для вашего проекта.
Стройте и ремонтируйте https://suli-company.org.ua с лёгкостью! Полезные статьи, инструкции, советы по выбору материалов и подрядчиков ждут вас здесь.
Полный гид по строительству https://tsentralnyi.volyn.ua и ремонту: от планирования до отделки. Читайте, выбирайте и стройте с уверенностью и комфортом.
Портал о ремонте и строительстве https://buildingtips.kyiv.ua с полезными статьями, рекомендациями по выбору материалов и подрядчиков.
戰神賽特
2024最新老虎機戰神賽特試玩,網友最推薦這 3家娛樂城 : 1. ATG娛樂城、2. 富遊娛樂城、3. 1XBET娛樂城,無論是在網路評論或優惠活動,都相當出色。
戰神賽特是由ATG電子獨家開發的古埃及風格線上老虎機,傳說中戰神賽特是「力量之神」與奈芙蒂斯女神結成連理,共同守護古埃及的奇幻秘寶,只有被選中的的冒險者能夠進入探查。
hi88,
Đá Gà Online – Hình Thức Giải Trí Mới Mẻ và Hấp Dẫn
Ngày nay, với sự phát triển mạnh mẽ của công nghệ thông tin, nhiều hình thức giải trí truyền thống đã được chuyển thể sang các phiên bản trực tuyến, và đá gà online chính là một trong số đó. Đá gà không chỉ là một trò chơi có lịch sử lâu đời ở nhiều quốc gia, mà còn là một phần văn hóa đặc sắc, gắn liền với những giá trị truyền thống. Khi được số hóa, hình thức này mang đến nhiều lợi ích và trải nghiệm mới lạ cho người chơi.
Đá gà online cho phép người chơi tham gia vào các trận đấu bất cứ lúc nào và ở bất kỳ đâu, chỉ cần có kết nối internet. Điều này mang đến một sự thuận tiện vượt trội so với hình thức đá gà truyền thống, nơi người chơi thường phải đến sân đấu để có thể tham gia. Nhờ vào công nghệ livestream, người chơi có thể theo dõi trực tiếp các trận đấu từ xa, cảm nhận được không khí kịch tính và hồi hộp như đang ở sân đấu thực sự.
Ngoài ra, đá gà online còn tạo cơ hội cho người chơi tương tác với nhau, chia sẻ kinh nghiệm và chiến thuật. Đây không chỉ là một trò chơi đơn thuần, mà còn là một cộng đồng nơi người yêu thích đá gà có thể kết nối và giao lưu. Nhiều nền tảng đá gà online hiện nay còn cung cấp các dịch vụ đặt cược, giúp người chơi có thêm phần thú vị và hứng thú khi theo dõi trận đấu.
Tuy nhiên, bên cạnh những lợi ích đó, đá gà online cũng đặt ra nhiều vấn đề cần được xem xét. Cùng với sự phát triển của hình thức này, những tranh cãi về đạo đức, pháp lý và quyền lợi động vật cũng trở nên nổi bật. Nhiều người lo ngại rằng việc tổ chức đá gà, dù ở hình thức nào, cũng có thể gây tổn hại đến sức khỏe và quyền lợi của các chú gà. Vấn đề đặt cược cũng tạo ra rủi ro tài chính cho người chơi, và cần có sự quản lý chặt chẽ hơn từ phía các cơ quan chức năng.
Trong bối cảnh đó, để đá gà online phát triển bền vững, cần có các quy định hợp pháp và minh bạch nhằm bảo vệ quyền lợi của cả người chơi và động vật. Đồng thời, việc nâng cao nhận thức của cộng đồng về đạo đức trong việc tham gia các trò chơi giải trí này cũng là rất quan trọng.
Tóm lại, đá gà online là một hình thức giải trí mới mẻ, mang đến nhiều trải nghiệm thú vị cho người chơi. Tuy nhiên, đi kèm với nó là trách nhiệm trong việc bảo vệ quyền lợi động vật và đảm bảo tính hợp pháp của các hoạt động cá cược. Chỉ khi có sự cân bằng giữa giải trí và đạo đức, đá gà online mới có thể trở thành một phần hấp dẫn và bền vững trong đời sống giải trí hiện đại.
戰神賽特
2024最新老虎機戰神賽特試玩,網友最推薦這 3家娛樂城 : 1. ATG娛樂城、2. 富遊娛樂城、3. 1XBET娛樂城,無論是在網路評論或優惠活動,都相當出色。
戰神賽特是由ATG電子獨家開發的古埃及風格線上老虎機,傳說中戰神賽特是「力量之神」與奈芙蒂斯女神結成連理,共同守護古埃及的奇幻秘寶,只有被選中的的冒險者能夠進入探查。
đá gà 88
Đá gà online là một hình thức giải trí mới mẻ, kết hợp giữa trò chơi truyền thống đá gà và công nghệ hiện đại. Khi công nghệ số phát triển mạnh mẽ, nhiều trò chơi dân gian đã được chuyển thể thành các phiên bản online, và đá gà không phải là ngoại lệ. Trò chơi này không chỉ giúp người chơi có thể tham gia vào bất kỳ lúc nào, bất kỳ đâu, mà còn mang lại những trải nghiệm thú vị và kịch tính. Tuy nhiên, đá gà online cũng đã gây ra nhiều tranh cãi về mặt đạo đức, pháp lý và bảo vệ quyền lợi động vật.
Đá Gà Online – Hình Thức Giải Trí Mới Mẻ
Đá gà online là một hình thức giải trí mới mẻ, kết hợp giữa trò chơi truyền thống đá gà và công nghệ hiện đại. Trong những năm gần đây, khi công nghệ số phát triển mạnh mẽ, nhiều trò chơi dân gian đã được chuyển thể thành các phiên bản online, và đá gà cũng không phải là ngoại lệ.
Chơi đá gà online mang lại cho người chơi nhiều lợi ích. Một trong những điểm nổi bật nhất là sự tiện lợi. Với việc sử dụng internet, người chơi có thể tham gia vào các trận đá gà bất cứ lúc nào và ở bất kỳ đâu. Điều này giúp cho trò chơi trở nên dễ tiếp cận hơn, đặc biệt đối với những người bận rộn với công việc và không có nhiều thời gian để tham gia các hoạt động giải trí truyền thống.
Ngoài ra, đá gà online còn mang đến những trải nghiệm thú vị và kịch tính. Người chơi không chỉ đơn thuần là xem mà còn có thể tham gia đặt cược, theo dõi những trận đấu hấp dẫn và cảm nhận được không khí hồi hộp của từng phút giây. Các nền tảng đá gà online thường cung cấp nhiều tính năng như livestream trận đấu, thống kê kết quả, và giao lưu với cộng đồng người chơi, tạo nên một không gian giải trí sống động.
Tuy nhiên, đá gà online cũng đã gây ra nhiều tranh cãi về mặt đạo đức, pháp lý và bảo vệ quyền lợi động vật. Nhiều người cho rằng việc tổ chức đá gà, dù là trực tuyến hay truyền thống, vẫn là hành vi không đáng khuyến khích, bởi nó có thể gây tổn hại cho quyền lợi của động vật. Bên cạnh đó, vấn đề pháp lý liên quan đến cá cược và những rủi ro tài chính cũng là mối quan tâm lớn đối với xã hội.
Tóm lại, đá gà online là một hình thức giải trí hiện đại và thu hút nhiều người chơi. Tuy nhiên, sự phát triển của nó cũng cần đi kèm với những giải pháp để bảo vệ quyền lợi động vật và đảm bảo tính hợp pháp của hoạt động này. Sự cân nhắc về mặt đạo đức và pháp lý trong việc tham gia trò chơi sẽ giúp tạo ra một môi trường giải trí lành mạnh và bền vững.
Đá gà online là một hình thức giải trí mới mẻ, kết hợp giữa trò chơi truyền thống đá gà và công nghệ hiện đại. Khi công nghệ số phát triển mạnh mẽ, nhiều trò chơi dân gian đã được chuyển thể thành các phiên bản online, và đá gà không phải là ngoại lệ. Trò chơi này không chỉ giúp người chơi có thể tham gia vào bất kỳ lúc nào, bất kỳ đâu, mà còn mang lại những trải nghiệm thú vị và kịch tính. Tuy nhiên, đá gà online cũng đã gây ra nhiều tranh cãi về mặt đạo đức, pháp lý và bảo vệ quyền lợi động vật.
Đá Gà Online – Hình Thức Giải Trí Mới Mẻ
Đá gà online là một hình thức giải trí mới mẻ, kết hợp giữa trò chơi truyền thống đá gà và công nghệ hiện đại. Trong những năm gần đây, khi công nghệ số phát triển mạnh mẽ, nhiều trò chơi dân gian đã được chuyển thể thành các phiên bản online, và đá gà cũng không phải là ngoại lệ.
Chơi đá gà online mang lại cho người chơi nhiều lợi ích. Một trong những điểm nổi bật nhất là sự tiện lợi. Với việc sử dụng internet, người chơi có thể tham gia vào các trận đá gà bất cứ lúc nào và ở bất kỳ đâu. Điều này giúp cho trò chơi trở nên dễ tiếp cận hơn, đặc biệt đối với những người bận rộn với công việc và không có nhiều thời gian để tham gia các hoạt động giải trí truyền thống.
Ngoài ra, đá gà online còn mang đến những trải nghiệm thú vị và kịch tính. Người chơi không chỉ đơn thuần là xem mà còn có thể tham gia đặt cược, theo dõi những trận đấu hấp dẫn và cảm nhận được không khí hồi hộp của từng phút giây. Các nền tảng đá gà online thường cung cấp nhiều tính năng như livestream trận đấu, thống kê kết quả, và giao lưu với cộng đồng người chơi, tạo nên một không gian giải trí sống động.
Tuy nhiên, đá gà online cũng đã gây ra nhiều tranh cãi về mặt đạo đức, pháp lý và bảo vệ quyền lợi động vật. Nhiều người cho rằng việc tổ chức đá gà, dù là trực tuyến hay truyền thống, vẫn là hành vi không đáng khuyến khích, bởi nó có thể gây tổn hại cho quyền lợi của động vật. Bên cạnh đó, vấn đề pháp lý liên quan đến cá cược và những rủi ro tài chính cũng là mối quan tâm lớn đối với xã hội.
Tóm lại, đá gà online là một hình thức giải trí hiện đại và thu hút nhiều người chơi. Tuy nhiên, sự phát triển của nó cũng cần đi kèm với những giải pháp để bảo vệ quyền lợi động vật và đảm bảo tính hợp pháp của hoạt động này. Sự cân nhắc về mặt đạo đức và pháp lý trong việc tham gia trò chơi sẽ giúp tạo ra một môi trường giải trí lành mạnh và bền vững.
Полный гид по строительству https://tsentralnyi.volyn.ua и ремонту: от планирования до отделки. Читайте, выбирайте и стройте с уверенностью и комфортом.
промокоды на gg drop промо на гг дроп
Приветствую на https://bs2best.markets! Мы предлагаем надежные и проверенные покупки в интернете. Ознакомьтесь с нашими статьями о безопасности и легальности. Ваши покупки — наш приоритет!
Tormac.org https://tormac.org – это специализированный торрент-трекер, предназначенный для пользователей Mac-компьютеров. Сайт предоставляет широкий выбор контента, ориентированного на операционные системы macOS и iOS.
Сделайте ремонт https://tfsm.com.ua мечты с нашим сайтом! Советы, инструкции, рейтинг специалистов и новинки строительного рынка для вашего удобства.
mostbet bd download aviator game mostbet
mostbet online casino mostbet azerbaycan yukle
1win софт как поставить бонусы на 1win
сериалы онлайн бесплатно
TaskMy.ru – профессиональная помощь в решении задач любого уровня
TaskMy.ru – это надежный сервис, который предлагает качественную помощь в выполнении задач любых направлений: от технических расчётов и программирования до написания текстов и аналитики. Мы работаем быстро, эффективно и ориентированы на ваши требования.
Доверяя TaskMy.ru, вы получаете индивидуальный подход, точное соблюдение сроков и доступные цены. Оставьте свою задачу профессионалам – результат превзойдет ожидания!
A detailed history inter-milan-az com of the Italian football club Inter Milan. From their first Scudetto to their Champions League victory.
MLB Draft Betting https://bettingblog.website Your guide to the world of MLB draft betting. Expert predictions, top odds and detailed analysis will help you increase your chances of success. Bet and win with us!
Credit Union Mobile Home Loans https://blogcredit.tech are the perfect solution for buying or refinancing a mobile home. Affordable rates, easy application, and reliable support every step of the way. Take the first step toward your home with us!
Best Forex Trading Course https://blogforex.tech is your key to successful trading. Learn the secrets of professionals, study strategies and learn how to minimize risks. Master Forex easily and effectively!
Tennis betting https://yourmoneyblog.site best odds, predictions and analytics. Explore detailed match reviews, statistics and strategies to make successful bets. Use our tips and win!
Federal Gov Open Enrollment https://body-balance.online is your chance to upgrade or choose an insurance plan. Easy navigation, expert support, and a wide range of programs will help you make the right choice. Apply now!
Crypto Funk https://besttodaynew.com is a fresh look at cryptocurrencies. News, trends, guides and analytics for beginners and professionals. Find out how to get the most out of blockchain technology!
The author was able to express in words what many feel, but cannot formulate https://coasp.ilyx.ru/id-9698.html
The author touched on those problems that really worry every thinking person https://azxjk.ilyx.ru/id-201.html
No Credit Check Loans in Abilene TX https://daynewday1.com is fast access to money without unnecessary checks. Convenient terms, simple application and instant approval. Get financial help when you need it!
Home Equity Loans https://funnydays1.com How They Work, What Are the Terms and Benefits? Get the full details on how to use your home’s value for financial purposes. Find out more today!
Credit score requirements for FHA loans https://lifeofnews1.com minimum threshold and tips for improving. Find out how to increase your chances of getting a loan, as well as what affects approval. Detailed information for those who want to get a mortgage through FHA.
Auto loans from Community Credit Union https://sunnydays100.com are simple, affordable, and great value. Low interest rates and flexible repayment options make it easy to buy a new or used car.
программа производственного контроля парикмахерская программа производственного контроля ппк Москва
Your knowledge and expertise on various topics never ceases to amaze me I always learn something new with each post
Biography of American basketball legend Michael Jordan michael jordan az org personal life, participation in the Monaco Champions League match, film projects, marriage to Yvette Prieto, parenthood, net worth and collaboration with Michael Jackson. Latest updates in 2024.
Где купить https://giftbox-3.ru упаковочную оптом бумагу и печать коробки с логотипом в Орле.
Try your luck at taya365 login, where excitement meets reliability! Hundreds of popular games, unique promotions and instant payouts await you.
Dive into the exciting gaming world of taya 365 casino login! Endless selection of games, fast withdrawals and fair play – everything for your pleasure.
Скачать музыку бесплатно https://muztab.net просто! Большой выбор песен, хиты всех времён и редкие записи. Удобный поиск, быстрая загрузка и безлимитный доступ. Ваш плейлист ждёт пополнения!
buy THC joint in Prague Hemp in Prague
I’ve started using CBD gummies like https://www.cornbreadhemp.com/products/full-spectrum-cbd-gummies , and they’ve made a perceptible contrast in my routine. They’re submissive to use, taste monstrous, and yield a comprehensible spirit to incorporate CBD into my day. I’ve institute they better me moderate and increase my catch after a crave period, which has been a gargantuan benefit. The in keeping CBD dosage in each gummy is a enormous with an increment of for the sake of managing intake. If you’re account CBD, gummies are an select election to start with—just pocket tried you select a faithful brand in regard to the greatest results!
Hashish for sale in Prague Cali weed delivery in Prague
Betzula, canl? bahis konusunda yenilikci cozumler sunar. derbi heyecan? icin Betzula giris yaparak yuksek oranlar? kesfedebilirsiniz.
Betzula’n?n yuksek guvenlik onlemleri, profesyonel hizmet garantisi verir. guncel duyurular? kac?rmadan en son haberlerden haberdar olabilirsiniz.
favori futbol kuluplerinizin en iyi oranlarla kazanc saglayabilirsiniz.
Ayr?ca, platformun en yeni versiyonu, kullan?c?lara s?n?rs?z erisim sunar. Ozel olarak, betzula guncel giris, kolay ve h?zl? giris imkan?.
Betzula, mobil uyumlu ve h?zl? erisim f?rsatlar?na kadar tum kullan?c?lar?n ihtiyaclar?n? kars?lar. Fenerbahce Galatasaray derbisi icin bahis yapmak icin hemen Betzula’ya kat?l?n!
371212+
купить аттестат об окончании 9 классов
Free Manga Without Subscription manga release One Piece free online
Biography of Spanish footballer jordi alba Jordi Alba: Left back for Barcelona and the Spanish national team, trained at the academies of Barcelona and Valencia.
Welcome to the fan site https://memphis-depay-az.org dedicated to the active Dutch footballer Memphis Depay, his career path with clubs and the Dutch national team. Tattoos, personal life and news.
Официальная покупка диплома вуза с упрощенной программой обучения
Your blog is always a highlight of my day
I’ve started using CBD gummies like https://www.cornbreadhemp.com/products/cbd-sleep-gummies , and they’ve made a perceptible quarrel in my routine. They’re easy to turn to account, taste great, and provide a unembellished modus operandi to incorporate CBD into my day. I’ve institute they support me relax and redress my drop after a prolonged period, which has been a gargantuan benefit. The accordant CBD dosage in each gummy is a enormous benefit for managing intake. If you’re all in all CBD, gummies are an excellent election to start with—honourable pocket persuaded you select a faithful brand in regard to the greatest results!
okada4d
okada4d
okada4d
taya365 app taya365 app login
It’s not often that we come across content that really resonates with us, but this one is a standout. From the writing to the visuals, everything is simply wonderful.
I’ve started using CBD gummies like https://www.cornbreadhemp.com/products/cbda-oil , and they’ve made a noticeable contrast in my routine. They’re easygoing to use, palate great, and yield a unembellished spirit to incorporate CBD into my day. I’ve originate they lift me put one’s feet up and enhance my siesta after a extensive daytime, which has been a colossal benefit. The agreeing CBD dosage in each gummy is a humongous plus looking for managing intake. If you’re account CBD, gummies are an excellent opportunity to start with—proper make tried you select a loyal discredit payment the best results!
I’ve started using CBD gummies like https://www.cornbreadhemp.com/collections/thc-gummies , and they’ve made a perceptible contrast in my routine. They’re easygoing to use, taste distinguished, and provide a simple way to incorporate CBD into my day. I’ve institute they help me put one’s feet up and enhance my siesta after a long daytime, which has been a gargantuan benefit. The in keeping CBD dosage in each gummy is a enormous plus looking for managing intake. If you’re account CBD, gummies are an select option to start with—legitimate pocket trusty you settle upon a faithful discredit for the most outstanding results!
I’ve started using CBD gummies like https://www.cornbreadhemp.com/collections/full-spectrum-cbd-oil , and they’ve made a important disagreement in my routine. They’re casually to turn to account, taste great, and provide a simple spirit to mix CBD into my day. I’ve institute they better me moderate and improve my sleep after a long hour, which has been a stupendous benefit. The consistent CBD dosage in each gummy is a enormous gain in return managing intake. If you’re making allowance for CBD, gummies are an prime choice to start with—honourable make persuaded you settle upon a loyal brand looking for the most outstanding results!
別再被詐騙黑網騙了!3A最新娛樂城體驗金提供所有線上娛樂城的最新動向
By 3ACasino / December 17, 2024
隨著線上娛樂城的興起,越來越多的玩家選擇在網上娛樂平台上娛樂、賭博,並享受多元化的遊戲體驗。無論是體育賭博、老虎機還是各種賽事投注,線上3a娛樂城都提供了豐富的選擇。然而,隨著線上平台的繁榮,也伴隨著詐騙和不安全平台的風險。如何分辨正規可靠的娛樂城,並避免被詐騙或陷入黑網的陷阱,是每一位玩家必須謹慎對待的問題。
本文將為您介紹線上娛樂城的基本資訊,並提供一些有效的辨識技巧,幫助您避免進入詐騙的黑網,同時介紹3A娛樂城如何為玩家提供最新的娛樂城動向,讓您玩得安心、玩得開心。
一、線上3a娛樂城官網的發展與現狀
隨著科技的進步和網絡的普及,線上3a娛樂城逐漸成為了全球賭博行業的重要一環。這些平台讓玩家可以在家中舒適的環境中進行各種賭博活動,無需親自到賭場,隨時隨地享受賭博樂趣。
多元化的遊戲選擇
目前,線上娛樂城提供的遊戲種類非常豐富,包括老虎機、撲克、賓果、輪盤、21點、體育賭博等各式各樣的選項。玩家可以根據自己的興趣選擇不同的遊戲,並參與到全球賭博市場的競爭中。
技術創新
隨著虛擬現實(VR)技術、人工智慧(AI)等技術的發展,許多娛樂城平台也在不斷創新,提升玩家的體驗。例如,利用VR技術打造身臨其境的賭博環境,讓玩家仿佛置身於真實的賭場;而AI技術則被用於提高遊戲的公平性和精確性。
移動設備支持
隨著智能手機和平板電腦的普及,許多線上3a娛樂城也推出了移動版本,使得玩家可以隨時隨地享受娛樂遊戲。不僅如此,這些平台還推出了適合不同操作系統(如iOS、Android)的應用程式,讓遊戲體驗更加便捷和流暢。
二、線上3a娛樂城官網的詐騙風險
儘管線上娛樂城提供了許多便利和娛樂選擇,但隨著市場的擴大,一些不法分子也進駐其中,利用各種詐騙手段來侵害玩家的利益。這些詐騙黑網的特點通常表現為以下幾個方面:
假網站與假平台
詐騙網站往往以低廉的優惠和豪華的宣傳吸引玩家上鉤,這些網站的設計和操作界面看起來非常專業,但實際上它們並沒有真正的運營許可證。玩家將個人資料和資金投入這些平台後,會發現自己無法提現或賺取的金額被無故凍結。
誘人的獎金和優惠
詐騙平台常常通過推出不切實際的“首存大獎”或“免費彩金”等優惠來吸引玩家,並誘使玩家進行大量投注。這些優惠通常都附帶不合理的條件,並在玩家達不到要求時取消所有贈金,甚至使玩家的存款受到影響。
遊戲不公平與結果操控
部分不法娛樂城會使用作弊手段操控遊戲結果,尤其是老虎機、輪盤等隨機遊戲,玩家在這些平台上的每次投注都無法得到公平對待,從而產生不合理的損失。
不清楚的賭博條款與隱藏費用
許多不正規的娛樂城平台會將一些不明確或隱藏的條款添加到賭博合約中。這些條款可能涉及到存款、取款或遊戲的條件,使玩家無法順利提現,甚至可能被扣除不明費用。
三、如何識別正規3a娛樂城官網?
要避免進入詐騙黑網,首先要學會如何識別正規的3a娛樂城。以下是幾個辨別真偽的關鍵指標:
合法授權與運營許可證
正規的娛樂城平台會擁有合法的運營許可證,這些證書一般來自於知名的賭博監管機構,如英國賭博委員會(UKGC)、馬耳他博彩局(MGA)等。玩家可以在平台的底部或關於我們的頁面查看這些資訊,以確保該平台的合法性。
使用加密技術保障安全
正規平台會採用最新的SSL加密技術來保護玩家的個人資訊和資金安全。玩家可以在平台網址欄查看是否以“https”開頭,並且確認網頁上的支付方式是安全的。
透明的支付與提款政策
正規娛樂城會提供清晰明確的存款和提款流程,並且在玩家要求提款時不會無理拖延。平台的條款和條件應該是簡單且易於理解的,沒有隱藏費用。
客戶服務與口碑
正規3a娛樂城會提供全天候的客戶服務支持,並能迅速解答玩家的問題。玩家可以查看該平台的用戶評價與口碑,了解其他玩家的真實經驗。
四、3a娛樂城官網:為玩家提供最新的娛樂城動向
作為專業的線上娛樂平台,3A娛樂城致力於為玩家提供全面的娛樂資訊,並協助玩家避開詐騙黑網。我們提供以下幾項服務:
實時更新娛樂城資訊
3A娛樂城會定期更新最新的線上3a娛樂城動向,包括合法平台的推薦、遊戲的評測、賭博行業的動態等,讓玩家能夠隨時掌握市場變化。
專業的遊戲分析與技巧分享
我們的專業團隊會分享各種遊戲技巧、策略與賠率分析,幫助玩家提高遊戲的勝率。同時,還會提供對熱門遊戲的深入剖析,讓玩家能夠更好地理解遊戲規則,避免上當受騙。
安全保障與信譽保證
3A娛樂城嚴格篩選合作平台,所有推薦的娛樂城都經過嚴格審查,保證其合法性和安全性。玩家可以放心選擇平台進行遊戲,享受公正、安全的賭博體驗。
專業的客戶服務
我們提供全天候的客戶服務,隨時解答玩家在遊戲過程中的問題,並提供專業的遊戲指導與問題解決方案。
隨著線上娛樂城市場的發展,選擇一個安全、合法、可靠的娛樂平台對於每位玩家來說至關重要。避免被詐騙黑網騙取資金,保持理智並選擇正規的3a娛樂城,是享受線上賭博娛樂的基本前提。3A娛樂城作為領先的娛樂平台,將繼續為玩家提供最新的娛樂城動向和專業的遊戲資訊,幫助您在安全、公正的環境中享受遊戲樂趣。
https://aaawin88.org/3acasino/
Нужен ремонт техники чин почин скачать все услуги для вашего дома в одном месте! Выбирайте мастеров для ремонта, уборки или сантехнических работ. Качественный сервис, прозрачные цены и удобство использования.
I’ve started using CBD gummies like https://www.cornbreadhemp.com/products/cbda-oil , and they’ve made a clear-cut disagreement in my routine. They’re submissive to use, palate great, and require a elemental character to incorporate CBD into my day. I’ve institute they help me decrease and redress my sleep after a long daytime, which has been a colossal benefit. The consistent CBD dosage in each gummy is a enormous with an increment of in return managing intake. If you’re all in all CBD, gummies are an select option to start with—honourable establish sure you choose a loyal brand in regard to the greatest results!
This post was exactly what I needed to read today Your words have provided me with much-needed clarity and reassurance
Inventory and Barcoding bulk email software
Tobey Maguire’s https://tobey-maguire-az.com biography: personal life, memories of him, friendship with Leonardo DiCaprio, divorce from ex-wife. Role in Spider-Man films, career now.
Biography of footballer iker-casillas Iker Casillas: personal life, separation from ex-wife Sara Carbonero.
Biography of Spanish footballer Dani Carvajal dani-carvajal-az com personal life, marriage to Joselu and twin sisters. Performances at the Euro for Real Madrid and the Spanish national team.
ftp downloading Webcam software
“Ищете качественный кирпич напрямую от производителя? https://Muravey61.ru – ваш надежный поставщик строительных материалов в регионе! Мы предлагаем кирпич высшего качества по доступным ценам прямо с завода. Доставка точно в срок, широкий ассортимент, и гарантированное качество – всё, что нужно для вашего строительства. Закажите у нас и убедитесь сами, что с нами строить легко!”
I’ve started using CBD gummies like https://www.cornbreadhemp.com/products/full-spectrum-cbd-gummies , and they’ve made a noticeable disagreement in my routine. They’re easy to turn to account, palate distinguished, and require a elemental way to incorporate CBD into my day. I’ve found they lift me moderate and enhance my siesta after a long daytime, which has been a gargantuan benefit. The in keeping CBD dosage in each gummy is a humongous plus in return managing intake. If you’re account CBD, gummies are an select option to start with—just make tried you settle upon a loyal discredit looking for the most outstanding results!
Wow, this blogger is seriously impressive!
диплом института купить
I’ve started using CBD gummies like https://www.cornbreadhemp.com/collections/full-spectrum-cbd-oil , and they’ve made a perceptible contrast in my routine. They’re casually to utilize, motif distinguished, and yield a comprehensible spirit to incorporate CBD into my day. I’ve institute they lift me moderate and increase my siesta after a prolonged day, which has been a huge benefit. The agreeing CBD dosage in each gummy is a enormous benefit in return managing intake. If you’re all in all CBD, gummies are an remarkable opportunity to start with—honourable establish persuaded you settle upon a trustworthy brand payment the most outstanding results!
The topics covered here are always so interesting and unique Thank you for keeping me informed and entertained!
Your positivity and optimism are contagious It’s evident that you genuinely care about your readers and their well-being
best canadian pharmacy to buy from: legit canadian online pharmacy – canadian pharmacy meds
online canadian pharmacy reviews: canada pharmacy online – canadian pharmacy 365
Now you can’t find a person formula1 who hasn’t heard of Formula 1. Today it is one of the most prestigious and popular sports on the planet.
Biography of Zendaya Coleman zendaya-maree (Zendaya): modeling career, music and cinema, details of her personal life, ex-boyfriend Jacob Elordi, romance with Tom Holland.
Welcome to the world of Neymar neymar-azerbaycan.com/ a fan site dedicated to the great footballer. Learn all about his career, achievements and unique playing style.
Welcome to the main page karim benzema azerbaijan com of the fansite dedicated to the world football star Karim Benzema. Learn all about his incredible career, incredible achievements and phenomenal skills.
Biography of British actress emily blunt az com Emily Blunt: personal life, dating and relationship with her husband John Krasinski, raising children.
canadian valley pharmacy CanadianMdPharm canadian pharmacy world reviews
https://mexicaneasypharm.com/# Mexican Easy Pharm
canadian pharmacy drugs online
canadian pharmacy ltd https://canadianmdpharm.com/# my canadian pharmacy review
cheapest online pharmacy india
скупка золота спб цена за грамм 585 скупка лома золота в спб
medicine in mexico pharmacies: Mexican Easy Pharm – Mexican Easy Pharm
Respilean health plays a crucial role in overall wellness, yet challenges such as persistent coughing, difficulty breathing, and wheezing can significantly affect daily activities.
Meet Jogo Do Tigrinho online slot with a unique jungle atmosphere! Exciting features, free spins and big wins are waiting for you. Play anytime on any device, enjoying the dynamics and chances to win big. Feel the excitement with Jogo Do Tigrinho!
indian pharmacy: Indian Cert Pharm – Indian Cert Pharm
Оперативная помощь на дороге https://angeldorog.by услуги эвакуатора, грузовой и легковой шиномонтаж, а также грузоперевозки фурами по доступным ценам. Работаем круглосуточно, быстро реагируем и гарантируем надежность. Звоните в любое время – решим вашу проблему!
VMS software download for PC CCTV free
canadian pharmacy scam https://indiancertpharm.com/# Indian Cert Pharm
cheapest online pharmacy india
скупка стоматологического золота в спб дорого skupkazolotospb.ru
https://indiancertpharm.com/# Indian Cert Pharm
canadapharmacyonline com
Mexican Easy Pharm Mexican Easy Pharm Mexican Easy Pharm
indian pharmacy: Indian Cert Pharm – Indian pharmacy that ships to usa
mexican drugstore online: mexican online pharmacies prescription drugs – Mexican Easy Pharm
Your writing style is so engaging and easy to follow I find myself reading through each post without even realizing I’ve reached the end
Fairspin app
online canadian drugstore https://mexicaneasypharm.shop/# best online pharmacies in mexico
best india pharmacy
Your content always keeps me coming back for more!
Для начала заходим на площадку:
Заходим на оригинальную ссылку:
Ссылка https://bs1site.at
ССЫЛКА TOR: blackpxl62pgt3ukyuifbg2mam3i4kkegdydlbbojdq4ij4pqm2opmyd.onion
Официальный сайт Blacksprut
БлекСпрут официальная ссылка
Как зайти на даркнет маркетплейс БлекСпрут
Введение
В этой статье мы подробно расскажем, как зайти на даркнет маркетплейс БлекСпрут. Вы узнаете, как использовать официальные зеркала BlackSprut, ссылки на сайт БлекСпрут и способы безопасного доступа через ТОР и VPN. БлекСпрут является одним из наиболее популярных даркнет маркетплейсов, и доступ к нему требует определенных знаний и мер предосторожности.
Что такое БлекСпрут?
БлекСпрут (BlackSprut) – это даркнет маркетплейс, предлагающий широкий ассортимент товаров и услуг. Из-за своей природы и содержания доступ к БлекСпрут осуществляется через сети типа onion, обеспечивающие анонимность пользователей.
Как зайти на БлекСпрут: шаги и инструкции
Шаг 1: Установка ТОР браузера
Первым шагом для доступа к БлекСпрут через ТОР является установка ТОР браузера. Это специализированный браузер, который позволяет анонимно заходить на сайты в onion-сети.
Скачайте ТОР браузер с официального сайта Tor Project.
Установите браузер на ваш компьютер или мобильное устройство.
Запустите ТОР браузер.
Шаг 2: Использование официального зеркала BlackSprut
Для доступа к БлекСпрут важно использовать только проверенные и официальные ссылки. Официальное зеркало BlackSprut гарантирует безопасный доступ и защиту от фишинговых сайтов.
Официальная ссылка на БлекСпрут будет иметь формат.onion. Например, ссылка на сайт БлекСпрут может выглядеть так:
Зеркала сайта БлекСпрут обеспечивают резервный доступ в случае блокировки основного сайта. Например, зеркало БлекСпрут через ТОР:
Шаг 3: Подключение через VPN
Для дополнительной безопасности рекомендуется использовать VPN.
Выберите надежный VPN сервис.
Подключитесь к VPN перед запуском ТОР браузера.
Откройте ТОР браузер и введите официальный адрес БлекСпрут.
Шаг 4: Безопасный доступ к БлекСпрут через onion
Когда вы используете ТОР браузер и официальное зеркало БлекСпрут, важно следовать мерам предосторожности:
Проверяйте URL на наличие ошибок и подлинности.
Используйте VPN для дополнительной защиты.
Не вводите личные данные на подозрительных сайтах.
Часто задаваемые вопросы
Как получить доступ к БлекСпрут через onion?
Для доступа к БлекСпрут через onion сеть необходимо использовать ТОР браузер и официальные ссылки на сайт БлекСпрут. Подключение через VPN также рекомендуется для защиты вашей анонимности.
Как зайти на BlackSprut безопасно?
Чтобы безопасно зайти на BlackSprut, используйте ТОР браузер, подключайтесь через VPN, и проверяйте официальные зеркала сайта БлекСпрут. Никогда не переходите по подозрительным ссылкам.
Что такое зеркало БлекСпрут?
Зеркало БлекСпрут – это альтернативный адрес сайта, используемый для обеспечения доступа в случае блокировки основного сайта. Зеркало BlackSprut через ТОР помогает пользователям получить доступ к маркетплейсу, сохраняя их анонимность.
Теперь вы знаете, как зайти на даркнет маркетплейс БлекСпрут, используя официальные зеркала и ссылки. Следуйте этим инструкциям и соблюдайте меры предосторожности, чтобы обеспечить свою безопасность в даркнете. Официальный сайт BlackSprut и его зеркала через ТОР и VPN помогут вам получить доступ к БлекСпрут, оставаясь анонимным и защищенным.
blacksprutblack sprutссылки бсссылки в бс 2024ссылка на блекспрутрабочая ссылка блекспрутссылки тор блекспрутблекспрут актуальная ссылкаблекспрут ссылка bs0bestтор блекспрутссылки тор блекспрутблекспрут сайтблекспрут официальный сайтблекспрут входкак зайти на блекспруткак зайти на блэкспрутблэкспрут входблэкспрут ссылкаблэкспрут онионблэкспрут даркнетблэкспрут даркнетблэкспрут blacksprut даркнет обзор анонимной даркнет площадкиbs как зайтиbs at как зайти на сайтbs входbs ссылкаblacksprut darknetblacksprutblacksprut зеркалаblacksprut ссылкаblacksprut сайтзеркала blacksprut rusffкак зайти на blacksprutblacksprut официальныйblacksprut com зеркалоblacksprut зеркала онион2fa blacksprutрабочая blacksprutкод blackspruthttps blacksprutкак зайти на blacksprut rusffофициальная ссылка на blacksprutblacksprut маркетплейсрабочее зеркало blacksprutкак зайти на сайт blacksprut2fa код blackspruthttp blacksprutblacksprut bs0best atblacksprut актуальныетор blacksprutblacksprut ссылка rusffbs2best at ссылка blacksprutblacksprut актуальная ссылкаtor blacksprutblacksprut com зеркало rusffhttps blacksprut ссылкаblacksprut зеркала онион rusffblacksprut площадкиbs1site at ссылка blacksprutblacksprut netblacksprut входофициальная ссылка на blacksprut rusffblacksprut blacksprut clickblacksprut bs0tor atblacksprut официальный сайтblacksprut ссылка торкак зайти на сайт blacksprut rusffblacksprut https bs1site atblacksprut http bs0best athttp blacksprut ссылкааккаунты blacksprutрабочее зеркало blacksprut rusffhttps bs2site at ссылка blacksprutbs0best at ссылка blacksprut http bs2best atblacksprut 2blacksprut ссылка blacksprut darknetофициальная ссылка на blacksprutblacksprut ссылка rusffbs0best at ссылка blacksprutblacksprut актуальная ссылкаhttps blacksprut ссылкаbs1site at ссылка blacksprutофициальная ссылка на blacksprut rusffhttp blacksprut ссылкаhttps bs1site at ссылка blacksprutbs0best at ссылка blacksprut http bs0best atblacksprut ссылка tortor blacksprutblacksprut ссылка torblacksprut ссылка tor bs2tor nltor blacksprut rusffblacksprut зеркала torsprutblack sprut
Online medicine: Online pharmacy – Indian pharmacy international shipping
canada drugs online review https://mexicaneasypharm.shop/# Mexican Easy Pharm
Online medicine home delivery
Online pharmacy: Indian Cert Pharm – IndianCertPharm
ProDentim addresses common dental concerns such as gum sensitivity and discoloration, helping you achieve a brighter, healthier smile. Its dissolvable tablet format ensures easy and effective use for comprehensive dental care.
Best online Indian pharmacy Online pharmacy IndianCertPharm
Секреты успешной покупки входной металлической двери, которая прослужит долгие годы.
Места, где можно приобрести качественную входную металлическую дверь.
Советы по избежанию ошибок при покупке металлической входной двери.
Почему стоит выбрать металлическую входную дверь.
дверь металлическая входная цена железные двери .
Сравнение входных металлических дверей различных брендов.
1win
renting a electric car rent tesla
У нас вы можете купить айфоны https://vk.com/crazy_humor01 оптом по самым лучшим ценам. Оригинальные смартфоны Apple с гарантией качества. Постоянное наличие популярных моделей.
Drop a link to your favorite blog post of yours in the comments below, I’d love to read more.
диплом купить бакалавра
maple leaf pharmacy in canada https://indiancertpharm.shop/# indian pharmacy
indian pharmacy online
It means so much to receive positive feedback and know that my content is appreciated. I strive to bring new ideas and insights to my readers.
Как выбрать идеальную входную металлическую дверь, идеально впишется в интерьер.
Где купить надежную входную металлическую дверь по выгодной цене.
Что учесть при выборе входной металлической двери.
Почему стоит выбрать металлическую входную дверь.
двери входные металлические москва дверь входная металлическая купить .
Сравнение входных металлических дверей различных брендов.
Квартирный переезд https://spb-gruzoperevozka.ru с грузчиками быстро и качественно! Упакуем, вынесем, перевезем и разместим вещи на новом месте. Надежная команда, аккуратность и доступные тарифы.
стол квадратный для переговоров mm26.ru
northwest canadian pharmacy: CanadianMdPharm – best online canadian pharmacy
canadian family pharmacy: ed meds online canada – the canadian pharmacy
online canadian pharmacy review https://canadianmdpharm.com/# precription drugs from canada
pharmacy website india
киного короткометражки киного фильмы для просмотра дома
киного фильмы для взрослых киного авторское кино
Your positivity and enthusiasm are infectious I can’t help but feel uplifted and motivated after reading your posts
Откройте для себя последние https://kraftsir.ru новости, аналитику и экспертные обзоры о спорте и ставках. Узнайте о лучших стратегиях ставок, следите за актуальными событиями в мире спорта и получите все необходимые инструменты для успешных ставок.
1win
Лучшие советы по выбору металлической входной двери, которая прослужит долгие годы.
Лучшие магазины с широким выбором входных металлических дверей.
Как не ошибиться с выбором входной металлической двери.
Почему стоит выбрать металлическую входную дверь.
дверь металлическая заказать двери входные металлические .
Как выбрать между дверью одного бренда и дверью другого.
WOW just what I was looking for. Came here by searching for %keyword%
https://bike-drive.com.ua/led-linzy-dlya-avto-chomu-ce-naykrashchyy-vybir-dlya-suchasnoho-vodiya
Mexican Easy Pharm: Mexican Easy Pharm – pharmacies in mexico that ship to usa
Give a round of applause in the comments to show your appreciation!
Автоломбард в СПб https://www.6467373.ru быстрые деньги под залог вашего авто! Оценка за 15 минут, прозрачные условия, сохранение машины в вашем пользовании.
Online pharmacy cheapest online pharmacy india Indian pharmacy international shipping
indian pharmacy: Online medicine – indian pharmacy
Секреты успешной покупки входной металлической двери, которая прослужит долгие годы.
Лучшие магазины с широким выбором входных металлических дверей.
Что учесть при выборе входной металлической двери.
Преимущества металлических входных дверей перед другими видами.
дверь металлическая входная цена входная дверь .
Сравнение входных металлических дверей различных брендов.
Новости игровой индустрии https://depcult35.ru аналитику и обзоры самых популярных игр. Читайте о новинках, трендах и получайте полезные советы для улучшения игрового процесса.
Подробные стратегии покера http://fatcurus.ru и анализ турниров: эффективные тактики, разбор раздач и ключевые советы для улучшения игры. Только практическая информация для выигрышей.
заказать девушку калуга путаны калуга
Mexican Easy Pharm: Mexican Easy Pharm – Mexican Easy Pharm
OR Realty — это ваш надежный партнер в мире недвижимости. Мы предлагаем большой выбор квартир, домов и коммерческих объектов по выгодным условиям. Наши специалисты помогут вам найти идеальный вариант, соответствующий вашим потребностям. Надежность, качество и удобство — вот что делает OR Realty лучшим выбором. Обращайтесь!
best canadian online pharmacy https://indiancertpharm.com/# top online pharmacy india
reputable indian pharmacies
Indian Cert Pharm: IndianCertPharm – Best Indian pharmacy
888starz
https://canadianmdpharm.com/# canadian drug stores
canadian pharmacy 24h com
Mexican Easy Pharm: Mexican Easy Pharm – Mexican Easy Pharm
Generative AI
The Comprehensive Resource for Artificial Intelligence-Powered Creativity
In this fast-paced environment, blending artistry with digital solutions is necessary for creativity and productivity. At Template Forge, we offer top-notch, specially designed prompts crafted to elevate your artistic undertakings across multiple categories.
Why Choose Template Forge?
We are devoted to offering only the top prompts to support your artistic pursuits. Our staff of experts attentively organizes each prompt to ensure practicality and pertinence, making it more convenient for you to locate inspiration when you desire it most.
Diverse Categories
Our wide-ranging library includes multiple types, such as social networking advertising, problem-solving, and fiction writing. This diversity guarantees you have the tools needed to handle any project competently.
Elevate Your Creativity
Template Forge’s suggestions serve as a foundation for your ideas, enabling you to center on your individual perspective and goals free from the burden of brainstorming. Each prompt is created to stimulate and guide you through the innovative path.
Connect with thousands of content creators who have harnessed the capabilities of AI at Template Forge. Explore our extensive fields today and access your imaginative potential. With our superior prompts, developing with intention has ever been easier. Welcome to your comprehensive marketplace for artificial intelligence-driven artistry!
canadian pharmacies online CanadianMdPharm prescription drugs canada buy online
The Comprehensive Shop for Artificial Intelligence-Powered Innovation
In this rapid society, blending artistry with technology is essential for progress and productivity. At Our Platform, we deliver superior, specially designed prompts intended to elevate your innovative works across multiple areas.
Why Choose Template Forge?
We are dedicated to providing only the best prompts to assist your innovative pursuits. Our crew of authorities attentively compiles each prompt to guarantee applicability and significance, enabling it more convenient for you to discover inspiration when you need it the most desperately.
Diverse Categories
Our comprehensive inventory includes multiple categories, including digital marketing, technical troubleshooting, and narrative crafting. This breadth guarantees you have the means needed to manage any task efficiently.
Elevate Your Creativity
Template Forge’s prompts serve as a catalyst for your ideas, permitting you to focus on your personal voice and ambitions free from the pressure of brainstorming. Each prompt is designed to inspire and direct you through the imaginative process.
Connect with thousands of content innovators who have utilized the strength of artificial intelligence at Template Forge. Check out our wide categories today and access your innovative possibilities. With our top-notch prompts, developing with clarity has not been more straightforward. Welcome to your ultimate shop for AI-enabled innovation!
Your Supreme Place for Exclusive In-Game Products!
In the current fast-paced gaming world, the thrill of adventure and growth is crucial. If you’re seeking for rare relics, restricted device skins, tailored modes, codes, assets, tasks, or user-friendly top-up assistance, look no further! Greetings to Items4Games, your complete marketplace for a large variety of high-quality in-game items crafted to elevate your gaming playtime.
Why Items4Games Is Different
Diverse Assortment of In-Game Assets
We supply a broad range of in-game items, from rare appearances to exclusive items and game keys. Our selection is adapted to boost your gameplay and involve you in a world of unbounded options.
Backing for Popular Names
Our extensive catalog includes hit games like CS2, Fortnite, Valorant, Dota 2, and Call of Duty. No matter your gaming taste, we have products that meet to the top hits in the field.
Elevated Gaming Journey
With limited in-game assets, you can gain new capabilities and exhibit your individual style. From unique weapon designs to powerful artifacts, our offerings change your gaming times into extraordinary experiences.
Protected and Dependable Deals
We prioritize your safety with secure and honest transactions. You can explore securely, knowing that your information is secure at all occasions.
Competitive Costs
Obtain top-quality items without destroying the budget. Our cost-effective and fair rate system ensures that enhancing your gaming adventure is accessible to all.
Intuitive Interface
Our user-friendly design allows you to effortlessly look through and secure the assets you desire, reducing you effort and boosting your acquisition experience.
What Is Ready for You at Items4Games
Find weapon styles that represent your character, exclusive artifacts for distinct achievements, and game keys that unlock new areas. Our supplies and tasks assist you improve up effortlessly, while balance services hold your game budget ready for engagement. Enjoy more game types that bring change and richness to your gaming experiences.
In closing, Items4Games is your final source for enhancing your gaming playtime with superior in-game products. Explore our collection today and improve your gameplay to new limits!
mexican drugstore online: Mexican Easy Pharm – buying from online mexican pharmacy
Immerse into the Realm of GTA 5 RP: Become a part of Our Exclusive Roleplay Server
Welcome to the captivating universe of GTA 5 RP, where all player can create their individual narrative in a vibrant gaming atmosphere. Our roleplay server is ideal for those desiring an immersive and immersive experience. Become part of a active community of GTA RP aficionados and walk into this stimulating world!
How to Begin Playing?
1. Purchase and set up a licensed version of GTA 5.
2. Set up the launcher.
3. Connect to the server and enroll through the application or our platform to start your journey!
Our Server: An Open World Experience
Our server presents a special open-world environment with tailored mods that allow you to build your criminal network, go on adventurous missions, and shape your protagonist’s narrative. Whether you become part of street gangs or transform into a leading cop, the opportunities are boundless!
Earn Money and Increase Your Fortune
Are you ready to dominate the thoroughfares of Los Santos and earn big money? We offer the resources and tactics to help you amass a prosperity in the realm of GTA RP.
Minecraft loot
Experience the World of Minecraft: Your Ultimate Existence and Chaos Exploration
Welcome to your Entrance to the Highly Thrilling and Immersive Minecraft Online Adventure. Whether you’re a Creator, Fighter, Explorer, or Strategist, our Platform Provides Endless Opportunities to Experience Survival and Freedom Environments in Methods you’ve Seldom seen Earlier.
Why Opt For Journeys in Minecraft?
Our Platform is Created to Offer the Top Minecraft Journey, Integrating Specialized Environments, Thrilling Playstyle, and a Vibrant Society. Discover, Overcome, and Construct your own Explorations with Special Attributes Created for Each type of User.
Essential Highlights
– Persistence and Freedom Settings: Confront the Thrill of Persisting against the odds or Dive into Untamed PvP Fights with no rules and full freedom.
– Enormous Platform Capacity: With Availability for up to 3,750 Participants, the Action never stops.
– 24/7 Network Access: Access At All Times to Take Part In Lag-Free, Reliable Gameplay.
– Specialized Resources: Explore our Precisely Built Minecraft Maps Loaded with Addons, Extras, and Unique Products from our Virtual Inventory.
Unique Gameplay Modes
Endurance Mode
In Endurance Scenario, you’ll Traverse Vast Landscapes, Procure Resources, and Design to your heart’s content. Fight off Enemies, Partner with Teammates, or Face on Independent Quests where only the Powerful Overcome.
Freedom Feature
For Players Searching For Anarchy and Adrenaline, Chaos Scenario Provides a Environment with No Boundaries. Engage in Competitive PvP Fights, Create Teams, or Confront Enemies to Rule the Zone. Here, Persistence of the Fittest is the Only Order.
Tailored Minecraft Attributes
– Quest Worlds: Explore Unique Minecraft Dungeons and Adventurous Challenges.
– Trading and Exchanges: Our Player-Driven System Enables you to Trade, Acquire, and Exchange Goods to Ascend the Positions and Create Your Reputation as a Influential Gamer.
– Minecraft Shop: Explore Premium Items, Improvements, and Levels that Improve your Playstyle.
Minecraft Marketplace: Upgrade Your Gameplay
Our Interactive Marketplace Delivers a Variety of Improvements, Ranks, and Assets to Suit every Player. From Inexpensive Contribution Packs to Premium Ranks, you can Gain Additional Features and Bring your Journey to the Next Level.
Popular Features
– Donate Cases (x10) – €1.00
– VIP – €1.40
– Elysium Rank – €20.00
– OWNER Status – €40.00
– BOSS Tier – €60.00
Top Tiers for Premier Players
– CREATOR (€10.00) – Achieve Design Options to Unleash your Creativity.
– Vanguard (€12.00) – Elite Perks and Unique Perks.
– Paragon (€59.10) – Exclusive Features for the Ultimate Player.
– Luminescent (€50.00) – Stand Out as a Legendary Figure on the Server.
Join Our Supportive Minecraft Network
We Strive in Creating a Friendly, Dynamic, and Friendly Group. Whether you’re Tackling RPG Tasks, Traversing Specialized Worlds, or Taking Part in Interactive PvP, there’s Constantly something New to Enjoy.
Elements You Can Expect
– Friendly Community: Interact With Like-Minded Minecraft Gamers from Everywhere.
– Exciting Activities: Take Part in Special Activities, Competitions, and Global Events.
– Dedicated Help: Our Staff Delivers Reliable Interaction and Assists you with any Issues.
Your Ultimate Objective for High-Quality In-Game Items!
In contemporary dynamic gaming environment, the thrill of investigation and advancement is important. If you’re seeking for rare items, unique tool looks, tailored types, access, materials, missions, or easy funding options, look no further! Introducing to Items4Games, your one-stop store for a wide variety of high-quality in-game products developed to enhance your gaming playtime.
Why Items4Games Is Different
Multiple Selection of In-Game Items
We provide a extensive variety of in-game items, from rare styles to distinctive artifacts and game tokens. Our catalog is tailored to boost your gameplay and involve you in a world of infinite possibilities.
Backing for Well-known Games
Our extensive offering contains hit games like CS2, Fortnite, Valorant, Dota 2, and Call of Duty. No matter your gaming choice, we have products that respond to the most popular titles in the sector.
Elevated Gaming Path
With unique in-game products, you can unlock new potential and display your unique touch. From custom weapon styles to robust artifacts, our products elevate your gaming experiences into extraordinary experiences.
Secure and Consistent Transactions
We prioritize your security with reliable and consistent exchanges. You can shop securely, knowing that your data is guarded at all timeshares.
Competitive Costs
Get high-quality items without smashing the budget. Our cost-effective and equitable rate model ensures that elevating your gaming journey is achievable to all.
User-Friendly Interface
Our easy-to-use system permits you to effortlessly explore and secure the products you need, reducing you energy and boosting your acquisition experience.
What Is Ready for You at Items4Games
Explore weapon styles that show your style, unique artifacts for noteworthy achievements, and game keys that grant new material. Our materials and quests aid you level up smoothly, while refill assistance keep your game resources ready for use. Enjoy additional game styles that add difference and substance to your gaming sessions.
In closing remarks, Items4Games is your final source for boosting your gaming experience with superior in-game assets. Explore our selection today and boost your gameplay to new levels!
canadian pharmacy phone number https://indiancertpharm.com/# Indian Cert Pharm
indian pharmacy online
Explore CS2 Textures: Find Your Flawless Match
Transform Your Playstyle
Display your individuality in Counter-Strike 2 (CS2) with distinct weapon skins. Our store provides a wide selection, from scarce to limited-edition styles, allowing you to demonstrate your taste and improve your gameplay.
Easy and Safe Acquisition
Appreciate a seamless shopping experience with fast digital shipment, ensuring your just purchased skins are instantly available. Purchase with confidence with our protected checkout process, whether you’re looking for affordable options or premium designs.
How It Works
1. Explore the Collection: Browse a broad variety of CS2 skins, sorted by scarcity, weapon type, or style.
2. Select Your Skin: Place your desired skin to your basket and move to payment.
3. Equip Your New Skins: Promptly receive and apply your skins in-game to shine during games.
Affordable Customization
Personalization should be attainable for everyone. We frequently offer deals on CS2 skins, providing high-quality designs accessible at reasonable prices.
Featured Textures
– P250 | Nuclear Threat (Factory New) – 3150 €
– Desert Eagle | Hand Cannon (Minimal Wear) – 450 €
– StatTrak™ P2000 | Ocean Foam (Factory New) – 285.88 €
– Glock-18 | Synth Leaf (Field-Tested) – 305 €
Embark on Shopping Today!
Upgrade your gameplay with our remarkable collection of CS2 skins. Whether upgrading your firearms or establishing a distinct collection, our store is your destination for top-notch skins. Change your gaming adventure today!
Dive into the Universe of GTA 5 RP: Engage with Our Special Roleplay Server
Salutations to the thrilling realm of GTA 5 RP, where all participant can create their unique story in a dynamic gaming setting. Our roleplay server is suitable for those looking for an immersive and deep experience. Join a active community of GTA RP enthusiasts and walk into this exciting world!
How to Commence Playing?
1. Acquire and set up a authorized edition of GTA 5.
2. Set up the launcher.
3. Link to the server and register through the game or our platform to commence your journey!
Our Platform: An Open World Adventure
Our server provides a distinct open-world setting with tailored mods that allow you to forge your illicit empire, embark on thrilling missions, and form your character’s journey. Whether you engage with neighborhood gangs or transform into a top cop, the options are limitless!
Acquire Money and Expand Your Assets
Are you prepared to dominate the roads of Los Santos and acquire substantial money? We provide the instruments and strategies to help you accumulate a prosperity in the realm of GTA RP.
Uncover the World of Minecraft: Your Supreme Survival and Disorder Exploration
Welcome to your Portal to the Most Exciting and Absorbing Minecraft Multiplayer Adventure. Whether you’re a Designer, Battler, Discoverer, or Tactician, our Platform Provides Boundless Options to Explore Endurance and Freedom Modes in Methods you’ve Rarely seen Before.
Why Opt For Adventures in Minecraft?
Our Network is Designed to Deliver the Top Minecraft Experience, Blending Specialized Worlds, Engaging Gameplay, and a Strong Network. Navigate, Overcome, and Create your own Explorations with Unique Components Created for Any type of Participant.
Key Features
– Endurance and Chaos Options: Face the Thrill of Persisting against the odds or Step into Chaotic PvP Clashes with no rules and full freedom.
– Massive Platform Scale: With Slots for up to 3,750 Gamers, the Action never stops.
– 24/7 Platform Uptime: Access Anytime to Take Part In Seamless, Reliable Mechanics.
– Custom Material: Explore our Precisely Created Minecraft Realms Packed with Mods, Features, and Unique Products from our Virtual Store.
Exclusive Playstyle Features
Survival Feature
In Persistence Feature, you’ll Discover Expansive Terrains, Procure Materials, and Create to your heart’s content. Combat off Creatures, Partner with Partners, or Take on Single-Player Trials where only the Skilled Succeed.
Anarchy Scenario
For Gamers Searching For Excitement and Thrill, Anarchy Feature Delivers a Universe with No Boundaries. Engage in Adrenaline-Fueled PvP Battles, Create Partnerships, or Compete With Players to Dominate the Zone. Here, Endurance of the Most Skilled is the Ultimate Rule.
Custom Minecraft Elements
– Quest Terrains: Explore Special Minecraft Caves and Adventurous Tasks.
– Commerce and Bartering: Our Player-Driven Market Enables you to Exchange, Purchase, and Offer Goods to Climb the Ranks and Create Yourself as a Strong Competitor.
– Minecraft Inventory: Reach Exclusive Items, Levels, and Levels that Boost your Gameplay.
Minecraft Inventory: Power Up Your Playstyle
Our Interactive System Delivers a Variety of Improvements, Ranks, and Assets to Suit every Playstyle. From Cheap Contribution Offers to Exclusive Upgrades, you can Unlock Additional Opportunities and Take your Journey to the Maximum.
Popular Features
– Donate Cases (x10) – €1.00
– VIP – €1.40
– Elysium Level – €20.00
– OWNER Status – €40.00
– BOSS Rank – €60.00
Top Levels for Top Players
– CREATOR (€10.00) – Access Design Options to Express your Ideas.
– Vanguard (€12.00) – Premier Benefits and Tailored Perks.
– Paragon (€59.10) – Elite Benefits for the Premier Player.
– Luminescent (€50.00) – Dominate as a Iconic Figure on the Network.
Join Our Thriving Minecraft Group
We Aim in Developing a Supportive, Engaging, and Supportive Society. Whether you’re Facing RPG Adventures, Traversing Custom Maps, or Engaging in Community-Based PvP, there’s Forever something New to Discover.
Elements You Can Anticipate
– Friendly Network: Engage With Passionate Minecraft Gamers from Globally.
– Exciting Challenges: Compete in Thrilling Competitions, Contests, and Server-Wide Events.
– Dedicated Support: Our Staff Ensures Seamless Gameplay and Helps you with any Concerns.
Mexican Easy Pharm: Mexican Easy Pharm – Mexican Easy Pharm
Discover CS2 Skins: Discover Your Flawless Match
Transform Your Playstyle
Display your uniqueness in Counter-Strike 2 (CS2) with unique weapon skins. Our store offers a varied selection, from scarce to limited-edition designs, permitting you to showcase your aesthetic and enhance your gameplay.
Easy and Secure Purchasing
Enjoy a seamless shopping journey with rapid digital dispatch, ensuring your newly purchased skins are immediately available. Buy securely with our secure checkout process, whether you’re searching for affordable options or luxury designs.
How It Operates
1. Look through the Collection: Investigate a broad variety of CS2 skins, sorted by scarcity, gun type, or fashion.
2. Pick Your Skin: Place your perfect skin to your cart and move to finalization.
3. Fit Your New Skins: Immediately receive and equip your skins in-game to stand out during competitions.
Cost-effective Personalization
Tailoring should be available for every player. We frequently offer discounts on CS2 skins, providing high-quality designs obtainable at low prices.
Featured Textures
– P250 | Nuclear Threat (Factory New) – 3150 €
– Desert Eagle | Hand Cannon (Minimal Wear) – 450 €
– StatTrak™ P2000 | Ocean Foam (Factory New) – 285.88 €
– Glock-18 | Synth Leaf (Field-Tested) – 305 €
Begin Your Shopping Experience Immediately!
Upgrade your gameplay with our outstanding collection of CS2 skins. Whether upgrading your weapons or creating a distinct collection, our store is your destination for premium skins. Change your gaming adventure now!
Your blog post was fantastic, thanks for the great content!
Mexican Easy Pharm: mexican mail order pharmacies – medicine in mexico pharmacies
Mexican Easy Pharm: Mexican Easy Pharm – mexican border pharmacies shipping to usa
mostbet uz скачать на андроид mostbet uz скачать на компьютер
игра 1win 1win com ci
mostbet registration mostbet 1-5
Indian pharmacy that ships to usa Indian Cert Pharm Best online Indian pharmacy
I love how this blog promotes a healthy and balanced lifestyle It’s a great reminder to take care of our bodies and minds
1 Win
canadian pharmacy ltd https://canadianmdpharm.online/# canadian pharmacy 24
best online pharmacy india
canadianpharmacyworld com: Canadian Md Pharm – pharmacy canadian
Indian Cert Pharm: Indian Cert Pharm – Indian pharmacy international shipping
Your posts are so thought-provoking and often leave me pondering long after I have finished reading Keep challenging your readers to think outside the box
Indian pharmacy that ships to usa: indian pharmacy – Indian Cert Pharm
Лучшее казино для аркадных игр | Играйте в аркадные игры и выигрывайте крупные призы | Играйте в лучшие аркады на нашем сайте | Азартные аркады и огромные выигрыши | Аркадные игры и азарт ждут вас здесь | Соберите комбинации и побеждайте в аркадах | Погрузитесь в мир аркадных развлечений и азарта | Увлекательные аркады и возможность заработать деньги | Играйте в аркадные игры и ощутите азарт | Выигрывайте крупные денежные призы в аркадах | Большие денежные призы в аркадах | Уникальные аркадные игры в вашем распоряжении | Испытайте свою удачу в аркадном казино | Новейшие аркадные игры на ваш выбор | Играйте в аркады и выигрывайте деньги | Побеждайте в аркадных играх и получайте призы
аркада казино игра arkada casino официальный сайт регистрация .
Актуальные и свежие новости gastromoroz ru спорта и казино. Узнайте актуальные спортивные события, анализы матчей, советы по ставкам, обзоры казино игр и стратегии.
This blog is like a virtual mentor, guiding me towards personal and professional growth Thank you for being a source of inspiration
Indian Cert Pharm: Indian Cert Pharm – Indian pharmacy that ships to usa
Играйте в аркадные игры в лучшем онлайн казино | Уникальные аркадные игры только здесь | Играйте в лучшие аркады на нашем сайте | Увлекательные аркадные игры для всех | Аркадные игры и азарт ждут вас здесь | Уникальные аркады только у нас | Играйте в лучшие аркады в онлайн казино | Побеждайте в аркадных играх и получайте призы | Аркады и азарт для настоящих игроков | Побеждайте в аркадных сражениях и получайте выигрыши | Аркадные игры для всех желающих азарта | Побеждайте в аркадных баталиях и зарабатывайте деньги | Онлайн казино с самыми популярными аркадами | Лучшие аркадные развлечения только у нас | Побеждайте в аркадах и получайте денежные призы | Побеждайте в аркадных играх и получайте призы
arkada casino бездепозитный бонус arkada casino автоматы .
киного фильмы про призраков kinogo фильмы про пиратов
kinogo лучшие экшены kinogo лучшие фильмы
mexico pharmacies prescription drugs: Mexican Easy Pharm – medicine in mexico pharmacies
reputable canadian online pharmacy: canadian pharmacy ltd – canada drug pharmacy
pet meds without vet prescription canada: online canadian pharmacy – 77 canadian pharmacy
A modern AI tool ai undresser for working with images. Learn more about its features, capabilities and applications. Full privacy control and ease of use will ensure comfortable interaction.
киного семейные сериалы kinogo hd
Web hosting Compare the leading web hosting companies that offer fast and secure services, uptime guarantee,
Играйте в аркадные игры в лучшем онлайн казино | Играйте в аркадные игры и выигрывайте крупные призы | Онлайн казино для ценителей аркадных игр | Азартные аркады и огромные выигрыши | Играйте в аркады и наслаждайтесь азартом | Азарт и увлечение в аркадном казино | Уникальные аркадные игры ждут вас | Аркадное казино для всех | Аркады и азарт для настоящих игроков | Увлекательные аркады для ценителей азарта | Аркадные игры для всех желающих азарта | Уникальные аркадные игры и азарт в казино | Побеждайте в аркадах и станьте миллионером | Побеждайте в аркадах и получайте выигрыши | Играйте в аркады и выигрывайте деньги | Увлекательные аркады и возможность заработать деньги
arkada casino официальный аркада регистрация .
https://mexicaneasypharm.com/# reputable mexican pharmacies online
best canadian pharmacy
Mexican Easy Pharm: Mexican Easy Pharm – Mexican Easy Pharm
mexico drug stores pharmacies: mexican drugstore online – Mexican Easy Pharm
Играйте в аркадные игры в лучшем онлайн казино | Играйте в эксклюзивные аркады в онлайн казино | Победите в аркадах и станьте миллионером | Увлекательные аркадные игры для всех | Играйте в увлекательные аркады и выигрывайте призы | Большие выигрыши в аркадных играх | Азартные аркады для всех желающих | Играйте в аркады и выигрывайте деньги | Наслаждайтесь аркадами вместе с нами | Играйте в аркадные игры и выигрывайте деньги | Онлайн казино с увлекательными аркадами | Побеждайте в аркадных баталиях и зарабатывайте деньги | Играйте в аркадные игры и выигрывайте деньги | Новейшие аркадные игры на ваш выбор | Уникальные аркадные игры в онлайн казино | Увлекательные аркады и возможность заработать деньги
arkada casino регистрация через телефон arkada casino бонусы за регистрацию .
canadian drug pharmacy: canadian pharmacy ed medications – northern pharmacy canada
envelopamento de Ônibus
pharmacy canadian superstore: CanadianMdPharm – canadian pharmacy tampa
mexican drugstore online: Mexican Easy Pharm – п»їbest mexican online pharmacies
Compare the leading WordPress hosting services in United States that offer fast, secure and scalable solutions to launch your website in no time.
canadian discount pharmacy https://indiancertpharm.shop/# Indian Cert Pharm
indian pharmacy
Mexican Easy Pharm: Mexican Easy Pharm – best online pharmacies in mexico
It’s clear that you have a deep understanding of this topic and your insights and perspective are invaluable Thank you for sharing your knowledge with us
medication canadian pharmacy: CanadianMdPharm – reputable canadian online pharmacy
студия дизайнер интерьера москва дизайнер интерьера квартиры цена
I have been following your blog for a while now and have to say I am always impressed by the quality and depth of your content Keep it up!
canadian pharmacy store: my canadian pharmacy reviews – onlinecanadianpharmacy
my canadian pharmacy reviews: CanadianMdPharm – trustworthy canadian pharmacy
Biography of footballer Joshua Kimmich jimmy-butler personal life, wife and children. Career at Bayern Munich, statistics for Germany, work with Pep Guardiola, negotiations with Barcelona. Vice-captain at Euro 2024. Latest news for 2024.
Djokovic’s tennis career novak djokovic az org has been marked by numerous Grand Slam titles, showcasing his style of play. He has been a constant competitor to Rafael Nadal and Roger Federer.
Свежие футбольные новости http://vseofootball.ru обзоры матчей, Лига чемпионов, статистика и лучшие букмекерские бонусы для ставок на спорт.
Откройте мир мобильных игр games-ru ru рейтинги лучших проектов, тренды, советы и гайды. Играйте в популярные шутеры, RPG, стратегии и песочницы прямо на телефоне!
Все о Тони Кроосе toni-kroos на одном сайте: биография, актуальные новости, детальная статистика и эксклюзивные обновления о немецкой футбольной звезде. Присоединяйтесь к сообществу фанатов и будьте в курсе всех событий, связанных с Кроосом!
Лучшие советы по выбору металлической входной двери, которая прослужит долгие годы.
Места, где можно приобрести качественную входную металлическую дверь.
Что учесть при выборе входной металлической двери.
Преимущества металлических входных дверей перед другими видами.
заказать входную дверь купить входную дверь .
Сравнение входных металлических дверей различных брендов.
mexico pharmacies prescription drugs: Mexican Easy Pharm – buying prescription drugs in mexico online
Mexican Easy Pharm: Mexican Easy Pharm – Mexican Easy Pharm
Indian pharmacy international shipping: Indian pharmacy that ships to usa – Indian pharmacy international shipping
Betzula Twitter, casino oyunlar? konusunda essiz deneyimler sunar. Fenerbahce Galatasaray derbisi icin betzula guncel giris baglant?s? ile yuksek oranlar? kesfedebilirsiniz.
Betzula’n?n mobil uyumlu tasar?m?, her cihazdan erisim imkan? tan?r. guncel duyurular? kac?rmadan ozel promosyonlardan haberdar olabilirsiniz.
Fenerbahce ve Galatasaray gibi buyuk tak?mlar?n bahislerinizi an?nda yapabilirsiniz.
Ayr?ca, bet zula giris linki, kesintisiz bahis deneyimi sunar. Ozel olarak, betzula, tum bahis severler icin en iyi cozum.
Betzula, en genis bahis seceneklerinden ozel turnuvalara kadar en iyi deneyimi yasatmay? amaclar. en guncel oranlar? gormek icin hemen Betzula’ya kat?l?n!
707707+
Mexican Easy Pharm: best online pharmacies in mexico – Mexican Easy Pharm
In Jodo Do Tigrinho online slots, every spin is a step towards victory! Incredible graphics, exciting themes and many bonuses await you. Fortune favors the brave – try your hand and discover the world of winnings with Tigrinho!
Cryptocurrency trading service bitqt with AI is automation and efficiency. Artificial intelligence monitors market dynamics, reduces risks and optimizes transactions. The perfect solution for beginners and professionals.
canadian pharmacy cheap: CanadianMdPharm – canadian pharmacy 1 internet online drugstore
https://mexicaneasypharm.com/# best online pharmacies in mexico
canadian pharmacy king
Исследуйте Zeus vs Hades zeus-vs-hades-download.ru Gods of War! Играйте бесплатно, получайте фриспины и узнайте все о слоте 2024 года!
I can’t get enough of your insightful articles and engaging stories. Thank you for sharing your passion with the world!
best online pharmacies in mexico: reputable mexican pharmacies online – mexican online pharmacies prescription drugs
Indian Cert Pharm: Indian Cert Pharm – Best Indian pharmacy
Aviatrix game https://aviatrix-games.com/en/ has become a sensation in the world of crash games. Its unique format, featuring a rapidly growing multiplier and the possibility of an unexpected crash. Aviatrix crash game is at 1win, 1xbet, Mostbet, and Pin Up.
Mexican Easy Pharm: mexican mail order pharmacies – Mexican Easy Pharm
mexico pharmacies prescription drugs: medicine in mexico pharmacies – mexican mail order pharmacies
Aviatrix game https://aviatrix-games.com/en/ has become a sensation in the world of crash games. Its unique format, featuring a rapidly growing multiplier and the possibility of an unexpected crash. Aviatrix crash game is at 1win, 1xbet, Mostbet, and Pin Up.
Захватывающий слот Lucky Jet lucky jet play crash ru от Spribe с уникальной краш-механикой, который предлагает игрокам шанс испытать свою удачу и стратегическое мышление.
canadian pharmacy: Canadian Md Pharm – vipps canadian pharmacy
Добро пожаловать на сайт redtigerplay.ru/ посвященный слотам Red Tiger! Узнайте последние новости, стратегии для увеличения выигрышей и эксклюзивные бонусы.
Откройте для себя водное поло http://water-polo-ru.ru историю, правила, тактики и влияние этого захватывающего водного вида спорта. Узнайте, как динамика и стратегия сочетаются, делая водное поло уникальным и увлекательным.
Investigate CS2 Textures: Locate Your Flawless Match
Transform Your Playstyle
Display your personality in Counter-Strike 2 (CS2) with unique weapon skins. Our store provides a diverse selection, from scarce to limited-edition styles, allowing you to demonstrate your aesthetic and boost your gameplay.
Easy and Protected Buying
Savor a smooth shopping experience with fast digital dispatch, ensuring your recently purchased skins are promptly available. Buy securely with our secure checkout process, whether you’re looking for affordable options or luxury designs.
How It Operates
1. Look through the Selection: Investigate a vast range of CS2 skins, arranged by exclusivity, gun type, or style.
2. Choose Your Skin: Place your perfect skin to your cart and move to checkout.
3. Equip Your Recent Skins: Promptly receive and equip your skins in-game to differentiate during games.
Cost-effective Customization
Customization should be attainable for every player. We consistently offer deals on CS2 skins, ensuring top-tier designs accessible at reasonable prices.
Featured Skins
– P250 | Nuclear Threat (Factory New) – 3150 €
– Desert Eagle | Hand Cannon (Minimal Wear) – 450 €
– StatTrak™ P2000 | Ocean Foam (Factory New) – 285.88 €
– Glock-18 | Synth Leaf (Field-Tested) – 305 €
Begin Your Shopping Experience Immediately!
Upgrade your gameplay with our outstanding collection of CS2 skins. Whether enhancing your arms or creating a distinct collection, our marketplace is your destination for high-quality skins. Transform your gaming experience today!
Criminal roleplay
Immerse into the World of GTA 5 RP: Engage with Our Special Roleplay Server
Salutations to the exciting realm of GTA 5 RP, where all player can create their distinct narrative in a vibrant gaming setting. Our roleplay server is suitable for those desiring an engaging and enveloping experience. Join a vibrant community of GTA RP aficionados and enter into this thrilling world!
How to Begin Playing?
1. Purchase and install a licensed version of GTA 5.
2. Install the launcher.
3. Link to the server and sign up through the software or our website to start your adventure!
Our Server: An Open World Adventure
Our server provides a unique open-world setting with personalized mods that enable you to build your criminal network, go on adventurous missions, and form your protagonist’s narrative. Whether you engage with neighborhood gangs or become a elite cop, the possibilities are limitless!
Earn Money and Grow Your Fortune
Are you set to dominate the streets of Los Santos and earn considerable money? We provide the instruments and tactics to help you gather a fortune in the realm of GTA RP.
Discover CS2 Designs: Locate Your Perfect Match
Change Your Gameplay
Highlight your personality in Counter-Strike 2 (CS2) with distinct weapon skins. Our store features a diverse selection, from rare to limited-edition styles, allowing you to demonstrate your taste and enhance your gameplay.
Simple and Protected Acquisition
Enjoy a flawless shopping process with rapid digital shipment, ensuring your just purchased skins are promptly available. Shop securely with our secure checkout process, whether you’re looking for budget options or premium designs.
How It Works
1. Look through the Range: Investigate a vast variety of CS2 skins, arranged by exclusivity, weapon type, or fashion.
2. Select Your Skin: Include your desired skin to your basket and continue to finalization.
3. Fit Your New Skins: Instantly receive and use your skins in-game to differentiate during games.
Cost-effective Personalization
Customization should be attainable for every player. We regularly offer deals on CS2 skins, making top-tier designs obtainable at reasonable prices.
Featured Skins
– P250 | Nuclear Threat (Factory New) – 3150 €
– Desert Eagle | Hand Cannon (Minimal Wear) – 450 €
– StatTrak™ P2000 | Ocean Foam (Factory New) – 285.88 €
– Glock-18 | Synth Leaf (Field-Tested) – 305 €
Embark on Shopping Immediately!
Improve your gameplay with our outstanding collection of CS2 skins. Whether enhancing your arms or creating a unique collection, our marketplace is your hub for high-quality skins. Elevate your gaming journey today!
Mexican Easy Pharm: medication from mexico pharmacy – Mexican Easy Pharm
Best AI prompt bundles for productivity
Your Comprehensive Marketplace for AI-Powered Innovation
In today’s accelerated landscape, merging innovation with digital solutions is vital for creativity and effectiveness. At Our Platform, we provide premium, bespoke prompts intended to elevate your innovative initiatives across various categories.
Reasons to Choose Template Forge?
We are committed to providing only the highest quality prompts to support your imaginative projects. Our team of professionals thoroughly organizes each prompt to ensure applicability and importance, enabling it more convenient for you to discover ideas when you require it most.
Diverse Categories
Our comprehensive selection covers numerous segments, such as digital marketing, problem-solving, and creative storytelling. This range ensures you have the resources needed to manage any task successfully.
Elevate Your Creativity
Template Forge’s suggestions serve as a springboard for your ideas, permitting you to direct on your distinct voice and vision without the strain of brainstorming. Each prompt is intended to inspire and assist you through the innovative process.
Join thousands of pleased creators who have leveraged the strength of AI at Template Forge. Explore our diverse subjects today and unveil your innovative potential. With our high-quality prompts, producing with purpose has always been more straightforward. Welcome to your one-stop store for artificial intelligence-driven creativity!
Immerse into the Realm of GTA 5 RP: Become a part of Our Unique Roleplay Server
Greetings to the thrilling world of GTA 5 RP, where every participant can craft their unique tale in a energetic gaming atmosphere. Our roleplay server is suitable for those looking for an engaging and immersive experience. Join a lively community of GTA RP aficionados and walk into this stimulating world!
How to Commence Playing?
1. Acquire and install a authorized edition of GTA 5.
2. Install the launcher.
3. Link to the server and enroll through the application or our platform to begin your journey!
Our Environment: An Open World Journey
Our server offers a distinct open-world realm with custom mods that allow you to build your criminal kingdom, go on adventurous missions, and shape your protagonist’s journey. Whether you engage with neighborhood gangs or turn into a elite cop, the possibilities are endless!
Acquire Money and Expand Your Fortune
Are you ready to master the streets of Los Santos and make considerable money? We provide the instruments and strategies to help you amass a prosperity in the world of GTA RP.
Your Ultimate Place for Exclusive In-Game Assets!
In contemporary fast-paced gaming world, the joy of investigation and advancement is crucial. If you’re hunting for special relics, exclusive tool looks, focused features, access, assets, quests, or handy refill options, look no further! Welcome to Items4Games, your single shop for a vast selection of superior in-game goods designed to elevate your gaming playtime.
Why Items4Games Is Different
Wide Assortment of In-Game Items
We offer a wide variety of in-game items, from uncommon appearances to exclusive objects and game codes. Our catalog is designed to improve your gameplay and engage you in a environment of unbounded choices.
Support for Trending Games
Our broad inventory contains well-known games like CS2, Fortnite, Valorant, Dota 2, and Call of Duty. No matter your gaming preference, we have assets that respond to the biggest successes in the market.
Upgraded Gaming Adventure
With exclusive in-game goods, you can discover new abilities and illustrate your individual style. From custom weapon skins to strong artifacts, our items change your gaming experiences into outstanding events.
Trustworthy and Consistent Exchanges
We prioritize your well-being with reliable and dependable exchanges. You can purchase with confidence, knowing that your data is guarded at all times.
Affordable Costs
Obtain high-quality items without destroying the bank. Our reasonable and reasonable fee system ensures that improving your gaming experience is available to everyone.
User-Friendly System
Our simple platform enables you to simply explore and purchase the products you desire, reducing you effort and elevating your acquisition process.
What Is Waiting for You at Items4Games
Discover weapon styles that represent your style, unique artifacts for noteworthy achievements, and game access that reveal new material. Our resources and tasks help you develop up without trouble, while refill assistance maintain your game budget ready for play. Enjoy additional game styles that add diversity and depth to your gaming sessions.
In closing remarks, Items4Games is your final goal for elevating your gaming journey with exclusive in-game items. Browse our collection today and boost your gameplay to new extremes!
Your Comprehensive Shop for AI-Powered Artistry
In this dynamic landscape, integrating imagination with tech is vital for advancement and productivity. At Template Forge, we provide premium, specially designed prompts intended to improve your creative undertakings across multiple domains.
Reasons to Choose Template Forge?
We are dedicated to offering only the top prompts to assist your creative projects. Our crew of experts meticulously compiles each prompt to verify utility and relevance, enabling it more manageable for you to obtain motivation when you require it the most desperately.
Diverse Categories
Our extensive selection covers diverse categories, featuring social media marketing, issue resolution, and story creation. This breadth guarantees you have the tools needed to handle any project competently.
Elevate Your Creativity
Template Forge’s ideas serve as a springboard for your creativity, enabling you to center on your individual style and aspirations without the stress of idea generation. Each prompt is created to inspire and guide you through the artistic course.
Connect with thousands of content creators who have utilized the potential of artificial intelligence at Template Forge. Investigate our varied fields today and unlock your imaginative potential. With our superior prompts, crafting with purpose has always been simpler. Welcome to your comprehensive shop for AI-powered creativity!
Your Ultimate Place for High-Quality In-Game Goods!
In the current rapid gaming world, the excitement of discovery and progression is vital. If you’re hunting for uncommon objects, exclusive armament designs, focused modes, tokens, resources, challenges, or user-friendly refill assistance, look no further! Greetings to Items4Games, your all-in-one destination for a extensive range of high-quality in-game items developed to enhance your gaming playtime.
Why Items4Games Is Different
Diverse Variety of In-Game Assets
We present a large selection of in-game resources, from uncommon skins to unique relics and game tokens. Our collection is tailored to boost your gameplay and involve you in a environment of limitless choices.
Help for Famous Names
Our large offering showcases hit games like CS2, Fortnite, Valorant, Dota 2, and Call of Duty. No matter your gaming taste, we have items that meet to the top games in the field.
Improved Gaming Journey
With limited in-game goods, you can unlock new capabilities and exhibit your individual style. From unique weapon styles to robust artifacts, our offerings elevate your gaming plays into remarkable journeys.
Trustworthy and Consistent Purchases
We emphasize your security with secure and trustworthy purchases. You can explore with confidence, knowing that your information is secure at all times.
Affordable Rates
Obtain superior items without breaking the bank. Our affordable and equitable rate model ensures that enhancing your gaming playtime is available to anybody.
Intuitive System
Our accessible platform lets you to simply look through and purchase the assets you need, preserving you energy and enhancing your purchase adventure.
What Is Waiting for You at Items4Games
Find weapon looks that reflect your personality, exclusive artifacts for unique achievements, and game tokens that open new areas. Our materials and quests help you raise up easily, while refill services ensure your game funds ready for action. Enjoy more game formats that add change and complexity to your gaming plays.
In conclusion, Items4Games is your top source for elevating your gaming playtime with exclusive in-game goods. Check out our selection today and elevate your gameplay to new extremes!
my canadian pharmacy reviews: legit canadian online pharmacy – canadian pharmacy
canadian discount pharmacy canada rx pharmacy world canadian pharmacy 365
Thank you for the awesome content, it’s always appreciated
аттестат за 9 класс купить
best canadian pharmacy: CanadianMdPharm – canadian pharmacy 1 internet online drugstore
mexico pharmacies prescription drugs: mexico pharmacies prescription drugs – buying prescription drugs in mexico online
Скачайте бесплатно книгу https://storitelling.ru по сторителлингу и узнайте, как создавать истории, которые цепляют с первых строк. Практические советы, примеры и вдохновение для всех, кто хочет освоить искусство рассказчика.
www canadianonlinepharmacy: Canadian Md Pharm – the canadian pharmacy
Mexican Easy Pharm: reputable mexican pharmacies online – Mexican Easy Pharm
https://indiancertpharm.shop/# Indian Cert Pharm
canadian pharmacy reviews
Indian pharmacy international shipping Online pharmacy Indian pharmacy international shipping
pharmacies in mexico that ship to usa https://mexicaneasypharm.com/# buying prescription drugs in mexico online
reputable mexican pharmacies online
Indian pharmacy international shipping: indian pharmacy – Online pharmacy
Mexican Easy Pharm: Mexican Easy Pharm – buying prescription drugs in mexico online
From the insightful commentary to the captivating writing, every word of this post is top-notch. Kudos to the author for producing such fantastic content.
IndianCertPharm: Indian pharmacy international shipping – IndianCertPharm
Ресторанный консалтинг UPSKILLhttps://upskilll.ru/consulting это профессиональные услуги в сфере ресторанного бизнеса: анализ рынка, аудит заведения, устранение слабых мест, обучение персонала, занимаемся наставничеством рестораторов с 2018 года.
Беговой портал https://get.run календарь забегов России, программы подготовки к забегом, составленные МСМК по легкой атлетике, статьи, консультации с тренером, ответы на вопросы
Сайт игровых промокодов промокоды кс 2 это ваш доступ к эксклюзивным бонусам и скидкам. Бесплатные награды, внутриигровая валюта и уникальные акции ждут вас. Успейте воспользоваться всеми возможностями!
Хотите раскрутить продвижение телеграм мы знаем, как это сделать! Поможем увеличить охваты, привлечь активную аудиторию и вывести ваш контент на новый уровень.
капельница от запоя клиника http://www.medlinks.ru
This blog is like a breath of fresh air in the midst of all the negativity on the internet I’m grateful to have stumbled upon it
Ищете промокоды для игр рабочие промокоды на кейсы наш сайт – ваш лучший помощник! Собираем актуальные игровые промокоды для бонусов, скидок и эксклюзивных наград.
Explore the Universe of Minecraft: Your Premier Existence and Disorder Journey
Welcome to your Entrance to the Exceptionally Engaging and Engaging Minecraft Shared Adventure. Whether you’re a Creator, Warrior, Discoverer, or Planner, our Realm Provides Endless Possibilities to Take Part In Living and Chaos Environments in Approaches you’ve Seldom seen Until Now.
Why Opt For Experiences in Minecraft?
Our Platform is Designed to Offer the Supreme Minecraft Journey, Blending Specialized Environments, Captivating Playstyle, and a Vibrant Community. Discover, Overcome, and Construct your own Journeys with Tailored Components Designed for Each type of Participant.
Primary Features
– Survival and Freedom Scenarios: Confront the Adrenaline of Persisting against the odds or Immerse into Chaotic PvP Fights with no rules and full freedom.
– Huge Network Ability: With Slots for up to 3,750 Participants, the Gameplay never stops.
– 24/7 Network Status: Connect At Any Moment to Explore Uninterrupted, Reliable Gameplay.
– Unique Features: Explore our Carefully Crafted Minecraft Maps Packed with Enhancements, Addons, and Exclusive Items from our Store-Based Marketplace.
Distinctive Mechanics Options
Endurance Mode
In Survival Mode, you’ll Discover Wide Worlds, Acquire Supplies, and Construct to your heart’s content. Combat off Enemies, Team Up with Allies, or Accept on Independent Quests where only the Powerful Win.
Freedom Feature
For Users Seeking Excitement and Thrill, Freedom Scenario Delivers a Universe with Unlimited Play. Enter in Intense PvP Clashes, Create Groups, or Compete With Opponents to Dominate the Environment. Here, Endurance of the Best is the Sole Rule.
Tailored Minecraft Attributes
– Journey Worlds: Explore Custom Minecraft Caves and Thrilling Quests.
– Economy and Exchanges: Our Community-Driven Commerce Lets you to Exchange, Buy, and Sell Goods to Rise the Positions and Create Yourself as a Dominant User.
– Minecraft Inventory: Access Exclusive Products, Enhancements, and Levels that Enhance your Playstyle.
Minecraft Marketplace: Enhance Your Playstyle
Our Online Marketplace Delivers a Selection of Features, Statuses, and Assets to Match every Preference. From Budget-Friendly Support Bundles to Exclusive Ranks, you can Unlock New Possibilities and Elevate your Journey to the Maximum.
Popular Features
– Donate Bundles (x10) – €1.00
– VIP – €1.40
– Elysium Tier – €20.00
– OWNER Level – €40.00
– BOSS Status – €60.00
Top Statuses for Best Competitors
– CREATOR (€10.00) – Unlock Innovative Features to Showcase your Creativity.
– Vanguard (€12.00) – Top Features and Exclusive Features.
– Paragon (€59.10) – Special Benefits for the Best Gamer.
– Luminescent (€50.00) – Dominate as a Iconic Hero on the Network.
Join Our Supportive Minecraft Society
We Aim in Creating a Supportive, Dynamic, and Supportive Network. Whether you’re Facing RPG Adventures, Navigating Tailored Worlds, or Taking Part in User-Led PvP, there’s Always something Fresh to Explore.
What You Can Expect
– Friendly Group: Interact With Similar Minecraft Gamers from Different Countries.
– Exciting Activities: Take Part in Thrilling Competitions, Tournaments, and Server-Wide Challenges.
– Dedicated Assistance: Our Moderators Guarantees Seamless Gameplay and Assists you with any Questions.
Участок в Мишкином Лугу http://мишкинлуг.рф/uchastki-mishkinlug по Симферопольскому шоссе — идеальное место для строительства! Тихий поселок, прекрасные виды, удобный подъезд и все условия для комфортной жизни.
Участки в Лисичкином Очаге https://лисичкиночаг.рф неподалеку от Серпухова. Тихий, зеленый поселок с прекрасной природой и удобной транспортной доступностью. Здесь вы сможете построить комфортное жилье для себя и своей семьи.
Лисичкин Очаг возле Серпухова https://лисичкиночаг.рф/uchastki-lisichkinochag идеальные участки для вашего будущего дома! Живописная природа, хорошая транспортная доступность и возможность подключения всех коммуникаций ждут вас.
Explore the Universe of Minecraft: Your Ultimate Endurance and Chaos Exploration
Welcome to your Access to the Highly Engaging and Interactive Minecraft Online Experience. Whether you’re a Designer, Warrior, Discoverer, or Tactician, our Realm Offers Boundless Chances to Enjoy Survival and Anarchy Modes in Approaches you’ve Never seen Earlier.
Why Select Journeys in Minecraft?
Our Network is Built to Bring the Top Minecraft Journey, Merging Unique Environments, Exciting Interaction, and a Strong Network. Explore, Dominate, and Build your own Adventures with Unique Attributes Tailored for Any type of User.
Primary Components
– Persistence and Disorder Modes: Face the Challenge of Enduring against the odds or Plunge into Chaotic PvP Battles with no rules and full freedom.
– Huge Server Size: With Availability for up to 3,750 Gamers, the Activity never stops.
– 24/7 Network Status: Join At Any Moment to Explore Seamless, Lag-Free Play.
– Specialized Content: Traverse our Carefully Created Minecraft Environments Stocked with Addons, Features, and Limited Objects from our Store-Based Shop.
Unique Gameplay Settings
Persistence Option
In Persistence Scenario, you’ll Traverse Vast Worlds, Acquire Resources, and Design to your heart’s content. Battle off Enemies, Team Up with Allies, or Conquer on Individual Challenges where only the Skilled Win.
Disorder Feature
For Gamers Wanting Chaos and Adventure, Anarchy Scenario Delivers a World with No Rules. Dive in Adrenaline-Fueled PvP Battles, Establish Groups, or Confront Others to Control the World. Here, Living of the Strongest is the True Truth.
Unique Minecraft Components
– Quest Terrains: Traverse Unique Minecraft Dungeons and Exciting Quests.
– Commerce and Bartering: Our Community-Driven System Enables you to Trade, Purchase, and Offer Assets to Climb the Levels and Establish Yourself as a Influential Gamer.
– Minecraft Inventory: Explore Premium Goods, Improvements, and Ranks that Improve your Interaction.
Minecraft Inventory: Upgrade Your Gameplay
Our Interactive Store Delivers a Selection of Improvements, Levels, and Assets to Match every Playstyle. From Inexpensive Donation Packs to High-Tier Statuses, you can Access Exciting Options and Elevate your Adventures to the Top.
Best-Selling Goods
– Donate Packs (x10) – €1.00
– VIP – €1.40
– Elysium Level – €20.00
– OWNER Tier – €40.00
– BOSS Tier – €60.00
Top Ranks for Premier Players
– CREATOR (€10.00) – Unlock Innovative Features to Express your Imagination.
– Vanguard (€12.00) – Exclusive Benefits and Tailored Perks.
– Paragon (€59.10) – Elite Features for the Top Gamer.
– Luminescent (€50.00) – Dominate as a Elite Hero on the Server.
Join Our Active Minecraft Network
We Focus in Building a Friendly, Dynamic, and Welcoming Society. Whether you’re Completing RPG Quests, Discovering Tailored Maps, or Participating in User-Led PvP, there’s Consistently something Different to Experience.
Elements You Can Expect
– Friendly Group: Engage With Similar Minecraft Fans from Around the World.
– Exciting Competitions: Join in Special Challenges, Competitions, and Community-Wide Contests.
– Dedicated Assistance: Our Staff Provides Lag-Free Gameplay and Supports you with any Issues.
ST666 hiện đang khẳng định vị thế là sân chơi giải trí trực tuyến quy mô lớn và cực kỳ uy tín. Tại trang chủ ST666, bạn sẽ khám phá hàng loạt game cá cược hấp dẫn như live casino, cược thể thao, bắn cá đổi thưởng, xổ số may mắn, v.v. với tỷ lệ cược ưu đãi. Đừng bỏ lỡ cơ hội trải nghiệm cá cược đỉnh cao ngay tại ST666 để tận hưởng cảm giác xanh chín và thắng lớn!
ST666 – Điểm Đến Giải Trí Trực Tuyến Hàng Đầu Cho Người Yêu Cá Cược
ST666 đang từng bước khẳng định vị thế của mình như một sân chơi giải trí trực tuyến quy mô lớn và cực kỳ uy tín trong cộng đồng người chơi cá cược. Với sự đa dạng trong các loại hình trò chơi cùng tỷ lệ cược hấp dẫn, ST666 mang đến cho người chơi những trải nghiệm đỉnh cao, đầy kịch tính và cơ hội thắng lớn.
Đa Dạng Trò Chơi, Đẳng Cấp Giải Trí
Tại trang chủ ST666, bạn sẽ được khám phá một thế giới giải trí đa sắc màu với hàng loạt trò chơi cá cược hấp dẫn. Từ những trò chơi live casino đầy kịch tính, nơi bạn có thể tương tác trực tiếp với các dealer chuyên nghiệp, đến các trận cược thể thao sôi động, ST666 đáp ứng mọi nhu cầu của người chơi.
Đặc biệt, những ai yêu thích sự may rủi và cảm giác hồi hộp chắc chắn không thể bỏ qua các trò chơi như bắn cá đổi thưởng hay xổ số may mắn. Với tỷ lệ cược ưu đãi cùng phần thưởng hấp dẫn, ST666 là điểm đến lý tưởng để bạn thử vận may và tận hưởng những giây phút giải trí đỉnh cao.
Uy Tín Và An Toàn Tuyệt Đối
Một trong những yếu tố giúp ST666 chiếm được lòng tin của đông đảo người chơi chính là sự uy tín và minh bạch trong mọi giao dịch. Hệ thống bảo mật tiên tiến cùng đội ngũ hỗ trợ chuyên nghiệp luôn sẵn sàng giải quyết mọi thắc mắc của người chơi, đảm bảo trải nghiệm cá cược của bạn luôn suôn sẻ và an toàn.
Cơ Hội Thắng Lớn, Trải Nghiệm Đỉnh Cao
ST666 không chỉ là nơi để giải trí mà còn là địa chỉ lý tưởng để bạn thử thách bản thân và tìm kiếm cơ hội đổi đời. Với tỷ lệ cược hấp dẫn cùng nhiều chương trình khuyến mãi đặc biệt, ST666 mang đến cho người chơi cơ hội thắng lớn và tận hưởng cảm giác “xanh chín” khó quên.
Kết Luận
Nếu bạn đang tìm kiếm một sân chơi giải trí trực tuyến đẳng cấp, uy tín và đầy hứa hẹn, ST666 chính là sự lựa chọn hoàn hảo. Đừng bỏ lỡ cơ hội trải nghiệm những giây phút cá cược đỉnh cao và thử vận may của mình ngay hôm nay tại ST666. Hãy tham gia và khám phá thế giới giải trí đầy màu sắc, nơi niềm vui và phần thưởng lớn luôn chờ đón bạn!
ST666 – Nơi Giải Trí Gặp Cơ Hội!
indian pharmacy buy prescription drugs from india indian pharmacy
Online pharmacy: Online medicine – indian pharmacy
mexico pharmacies prescription drugs https://mexicaneasypharm.com/# mexican mail order pharmacies
mexican rx online
Kamagra 100mg price: Kamagra 100mg – Kamagra tablets
Kama Pharm: Kama Pharm – sildenafil oral jelly 100mg kamagra
Kama Pharm Kamagra 100mg Kama Pharm
It is very important that there are people who are ready to talk openly about such serious things https://kuajl.gov-edu.ru/id-6702.html
Thanks to the author for the courage to raise such important and relevant topics for everyone https://ezfoy.gov-edu.ru/id-9181.html
https://semapharm24.com/# SemaPharm24
Kamagra 100mg price
Отзывы о компаниях и работодателях https://potrebsojuz.ru в одном месте. Узнайте реальное мнение сотрудников и клиентов, чтобы принять правильное решение при выборе работы или услуг.
Комплексная юридическая помощь https://kramzenergo.ru для вас и вашего бизнеса. Анализ дел, представительство в судах, поддержка на всех этапах
Your blog post was fantastic, thanks for the great content!
cytotec pills buy online: buy cytotec over the counter – Cyt Pharm
semaglutide tablets price: buy rybelsus online – semaglutide tablets
http://predpharm.com/# price for 15 prednisone
buy prednisone online no prescription
bata4d
bata4d
https://cytpharm.shop/# п»їcytotec pills online
п»їkamagra
cheap priligy DapPharm dapoxetine online
капельница от запоя на дому капельницы для восстановления здоровья
buy Kamagra: Kama Pharm – Kama Pharm
bata4d
bata4d
1win bonus code no deposit 1win original
1win modelos 1win partners отзывы
sildenafil oral jelly 100mg kamagra: Kama Pharm – Kama Pharm
https://semapharm24.com/# rybelsus semaglutide tablets
prednisone pack
https://semapharm24.com/# semaglutide best price
Kamagra tablets
Откройте для себя историю слово пацана смотреть онлайн все серии честный взгляд на суровую реальность, где дружба и слово дороже всего. Уникальный проект о жизни без прикрас и ценности принципов.
It’s clear that you have a deep understanding of this topic and your insights and perspective are invaluable Thank you for sharing your knowledge with us
It’s clear that you are passionate about making a positive impact and your blog is a testament to that Thank you for all that you do
Priligy tablets: dapoxetine price – dapoxetine price
Kama Pharm: buy kamagra online usa – Kamagra 100mg price
CytPharm buy cytotec online fast delivery Abortion pills online
https://semapharm24.com/# buy semaglutide
super kamagra
https://kamapharm.shop/# Kama Pharm
prednisone 50mg cost
Kama Pharm: buy kamagra online usa – Kama Pharm
dap pharm: DapPharm – dap pharm
https://cytpharm.com/# Cyt Pharm
cheap kamagra
Dispositivos de balanceo: esencial para el desempeño suave y óptimo de las equipos.
En el mundo de la ciencia moderna, donde la productividad y la confiabilidad del dispositivo son de gran significancia, los sistemas de balanceo cumplen un función esencial. Estos equipos adaptados están desarrollados para ajustar y regular componentes giratorias, ya sea en dispositivos de fábrica, medios de transporte de traslado o incluso en dispositivos caseros.
Para los expertos en soporte de aparatos y los especialistas, operar con equipos de calibración es fundamental para asegurar el funcionamiento uniforme y seguro de cualquier mecanismo giratorio. Gracias a estas herramientas avanzadas modernas, es posible disminuir significativamente las movimientos, el estruendo y la tensión sobre los cojinetes, aumentando la vida útil de piezas valiosos.
Igualmente importante es el función que desempeñan los aparatos de calibración en la atención al usuario. El soporte técnico y el conservación constante empleando estos dispositivos facilitan proporcionar soluciones de excelente nivel, aumentando la contento de los usuarios.
Para los dueños de negocios, la aporte en estaciones de equilibrado y sensores puede ser importante para aumentar la productividad y productividad de sus sistemas. Esto es especialmente significativo para los dueños de negocios que manejan pequeñas y pequeñas organizaciones, donde cada punto importa.
También, los dispositivos de balanceo tienen una amplia aplicación en el área de la prevención y el supervisión de estándar. Habilitan identificar posibles problemas, previniendo mantenimientos caras y perjuicios a los dispositivos. Incluso, los resultados obtenidos de estos dispositivos pueden usarse para maximizar procesos y aumentar la visibilidad en buscadores de búsqueda.
Las campos de implementación de los aparatos de calibración comprenden variadas sectores, desde la fabricación de vehículos de dos ruedas hasta el seguimiento ecológico. No influye si se habla de enormes fabricaciones productivas o pequeños establecimientos domésticos, los dispositivos de balanceo son fundamentales para proteger un funcionamiento efectivo y sin fallos.
dapoxetine online priligy dapoxetine online
Cyt Pharm: CytPharm – Cyt Pharm
Sistemas de equilibrado: esencial para el operación fluido y óptimo de las dispositivos.
En el mundo de la avances actual, donde la eficiencia y la fiabilidad del aparato son de suma relevancia, los dispositivos de ajuste desempeñan un función fundamental. Estos equipos adaptados están desarrollados para balancear y fijar elementos rotativas, ya sea en equipamiento productiva, automóviles de desplazamiento o incluso en dispositivos caseros.
Para los profesionales en mantenimiento de sistemas y los técnicos, trabajar con sistemas de equilibrado es crucial para asegurar el desempeño suave y seguro de cualquier dispositivo dinámico. Gracias a estas alternativas modernas avanzadas, es posible reducir significativamente las vibraciones, el ruido y la esfuerzo sobre los cojinetes, aumentando la longevidad de elementos importantes.
De igual manera relevante es el papel que juegan los sistemas de equilibrado en la atención al cliente. El ayuda técnico y el reparación continuo aplicando estos sistemas habilitan brindar prestaciones de gran estándar, incrementando la bienestar de los compradores.
Para los propietarios de emprendimientos, la contribución en equipos de calibración y sensores puede ser fundamental para aumentar la efectividad y eficiencia de sus dispositivos. Esto es sobre todo importante para los inversores que gestionan medianas y modestas negocios, donde cada aspecto cuenta.
Asimismo, los dispositivos de calibración tienen una vasta uso en el campo de la fiabilidad y el gestión de estándar. Posibilitan detectar posibles fallos, previniendo intervenciones caras y daños a los sistemas. También, los indicadores extraídos de estos equipos pueden utilizarse para perfeccionar métodos y mejorar la visibilidad en plataformas de consulta.
Las zonas de utilización de los sistemas de calibración cubren numerosas ramas, desde la manufactura de ciclos hasta el control ecológico. No importa si se considera de enormes elaboraciones productivas o reducidos espacios domésticos, los aparatos de calibración son fundamentales para promover un operación óptimo y sin riesgo de fallos.
Explore CS2 Designs: Discover Your Flawless Match
Alter Your Gameplay
Display your personality in Counter-Strike 2 (CS2) with distinct weapon skins. Our store provides a diverse selection, from rare to limited-edition patterns, permitting you to demonstrate your taste and enhance your gameplay.
Easy and Safe Buying
Savor a seamless shopping experience with fast digital delivery, ensuring your just purchased skins are instantly available. Purchase confidently with our safe checkout process, whether you’re looking for low-cost options or high-quality designs.
How It Functions
1. Explore the Selection: Investigate a wide range of CS2 skins, sorted by rarity, arms type, or design.
2. Pick Your Skin: Add your perfect skin to your basket and proceed to payment.
3. Dress Your Latest Skins: Immediately receive and equip your skins in-game to stand out during games.
Budget-friendly Customization
Tailoring should be attainable for all. We frequently offer savings on CS2 skins, making top-tier designs available at low prices.
Featured Skins
– P250 | Nuclear Threat (Factory New) – 3150 €
– Desert Eagle | Hand Cannon (Minimal Wear) – 450 €
– StatTrak™ P2000 | Ocean Foam (Factory New) – 285.88 €
– Glock-18 | Synth Leaf (Field-Tested) – 305 €
Begin Shopping Today!
Improve your gameplay with our remarkable selection of CS2 skins. Whether boosting your arms or building a unique collection, our platform is your hub for top-notch skins. Transform your gaming journey today!
Kama Pharm: Kama Pharm – Kama Pharm
Explore CS2 Skins: Locate Your Perfect Match
Change Your Playstyle
Display your uniqueness in Counter-Strike 2 (CS2) with distinct weapon skins. Our store provides a diverse selection, from scarce to limited-edition styles, permitting you to showcase your aesthetic and enhance your gameplay.
Effortless and Safe Buying
Appreciate a seamless shopping process with quick digital dispatch, ensuring your newly purchased skins are immediately available. Buy with confidence with our secure checkout process, whether you’re searching for low-cost options or high-quality designs.
How It Works
1. Look through the Collection: Explore a wide array of CS2 skins, sorted by rarity, gun type, or design.
2. Select Your Skin: Place your perfect skin to your trolley and move to checkout.
3. Equip Your New Skins: Immediately receive and apply your skins in-game to differentiate during competitions.
Affordable Customization
Customization should be attainable for all. We regularly offer savings on CS2 skins, ensuring top-tier designs accessible at reasonable prices.
Featured Designs
– P250 | Nuclear Threat (Factory New) – 3150 €
– Desert Eagle | Hand Cannon (Minimal Wear) – 450 €
– StatTrak™ P2000 | Ocean Foam (Factory New) – 285.88 €
– Glock-18 | Synth Leaf (Field-Tested) – 305 €
Begin Shopping Today!
Improve your gameplay with our outstanding collection of CS2 skins. Whether upgrading your weapons or creating a unique collection, our platform is your destination for high-quality skins. Change your gaming adventure at once!
kinogo новинки 2025 kinogo культовые фильмы
kinogo детские сериалы kinogo фильмы 4K
киного сериалы по популярности kinogo фильмы по сценаристам
https://kamapharm.com/# sildenafil oral jelly 100mg kamagra
prednisone 40 mg daily
https://kamapharm.shop/# buy Kamagra
sildenafil oral jelly 100mg kamagra
Your All-in-One Resource for Artificial Intelligence-Powered Artistry
In this dynamic environment, integrating creativity with tech is essential for creativity and efficiency. At Our Platform, we offer top-notch, specially designed prompts crafted to elevate your artistic projects across multiple domains.
Reasons to Choose Template Forge?
We are dedicated to offering only the finest prompts to assist your innovative pursuits. Our crew of authorities carefully compiles each prompt to verify utility and relevance, allowing it easier for you to discover creativity when you desire it the most.
Diverse Categories
Our wide-ranging collection covers numerous segments, comprising digital marketing, problem-solving, and story creation. This diversity guarantees you have the capabilities needed to manage any initiative successfully.
Elevate Your Creativity
Template Forge’s prompts serve as a springboard for your ideas, letting you to center on your distinct voice and vision beyond the pressure of brainstorming. Each prompt is designed to inspire and direct you through the artistic course.
Become part of thousands of pleased creators who have tapped into the strength of artificial intelligence at Template Forge. Explore our varied subjects today and access your artistic potential. With our high-quality prompts, crafting with intention has never been simpler. Welcome to your one-stop resource for AI-powered imagination!
The Single Resource for AI-Fueled Imagination
In today’s accelerated society, blending innovation with digital solutions is vital for creativity and effectiveness. At Template Forge, we deliver high-quality, custom-crafted prompts crafted to improve your artistic initiatives across different categories.
Reasons to Choose Template Forge?
We are devoted to delivering only the top prompts to aid your artistic initiatives. Our group of specialists thoroughly curates each prompt to confirm usefulness and importance, making it easier for you to discover motivation when you require it the most.
Diverse Categories
Our broad library includes numerous fields, such as digital marketing, technical support, and story creation. This variety guarantees you have the tools needed to manage any task effectively.
Elevate Your Creativity
Template Forge’s ideas serve as a launchpad for your creativity, allowing you to concentrate on your unique expression and vision beyond the stress of conceptualizing. Each prompt is crafted to encourage and lead you through the innovative path.
Connect with thousands of pleased artists who have leveraged the strength of AI at Template Forge. Discover our varied categories today and access your creative talents. With our superior prompts, developing with intention has ever been easier. Welcome to your all-in-one store for artificial intelligence-driven imagination!
purchase cytotec: CytPharm – purchase cytotec
buy cytotec over the counter: order cytotec online – buy cytotec online
dap pharm cheap priligy DapPharm
https://dappharm.com/# buy dapoxetine online
п»їkamagra
Выбор современных родителей – коляска-трость, с прочными колесами и удобной ручкой.
Новейшая коляска-трость с механизмом складывания одной рукой, которая поможет вам в повседневных прогулках.
Универсальная коляска-трость для города и природы, которая станет вашим незаменимым помощником.
Качественная коляска-трость с удобной ручкой, и мягкими ремнями безопасности.
baciuzzi коляска трость https://kolyaski-trosti-progulochnye.ru/ .
Купите современную коляску-трость для вашего малыша, с прочными колесами и удобной ручкой.
Новейшая коляска-трость с механизмом складывания одной рукой, и удобным выдвижным козырьком.
Купите легкую и компактную коляску-трость по доступной цене, с удобной ручкой и амортизаторами.
Элегантная коляска-трость для путешествий и прогулок, и мягкими ремнями безопасности.
cosatto трость cosatto трость .
PurDentix is a dietary supplement formulated to support oral health by blending probiotics and natural ingredients.
semaglutide best price: SemaPharm24 – rybelsus semaglutide tablets
https://dappharm.com/# buy dapoxetine online
prednisone pill 10 mg
semaglutide best price: semaglutide tablets price – rybelsus semaglutide tablets
https://kamapharm.shop/# Kama Pharm
Kamagra 100mg price
купить диплом программиста
buy priligy: buy dapoxetine online – buy dapoxetine online
buy semaglutide [url=http://semapharm24.com/#]buy semaglutide[/url] SemaPharm24
exciting online slot jogo tigrinho 777 is excitement, fun and the opportunity to win a big prize. Plunge into the atmosphere of adventure and try your luck right now!
Priligy tablets: priligy – DapPharm
Откройте для себя blacksprut сайт возможности даркнет-рынка с тысячами предложений. Быстрая регистрация, надежные сделки и анонимность на каждом этапе.
Лучшее онлайн казино https://1wincasino.pl Огромный выбор автоматов, настольных игр и live-казино. Уникальные акции, приветственные бонусы и мгновенные выплаты сделают вашу игру еще интереснее.
поешь текст песни https://faav.ru
https://cytpharm.com/# buy cytotec pills online cheap
Kamagra 100mg
https://semapharm24.com/# semaglutide best price
cost of prednisone in canada
prednisone 12 mg: prednisone 2.5 mg daily – buy prednisone online canada
гончая для охоты видео охоты на утку
SemaPharm24: SemaPharm24 – semaglutide tablets for weight loss
https://semapharm24.shop/# Sema Pharm 24
п»їkamagra
Kama Pharm Kama Pharm п»їkamagra
CytPharm: buy cytotec online – Cytotec 200mcg price
SemaPharm24: cheap semaglutide pills – semaglutide tablets store
http://dappharm.com/# buy dapoxetine online
Kamagra 100mg price
https://semapharm24.shop/# buy rybelsus online
prednisone pill prices
Your Top Goal for High-Quality In-Game Products!
In the current fast-paced gaming environment, the thrill of investigation and advancement is essential. If you’re seeking for rare objects, restricted weapon designs, focused features, access, supplies, quests, or handy balance options, look no further! Welcome to Items4Games, your complete shop for a wide range of superior in-game products designed to enhance your gaming playtime.
Why Items4Games Is Unique
Wide Selection of In-Game Goods
We supply a extensive range of in-game items, from unique styles to distinctive objects and game access. Our collection is tailored to boost your gameplay and involve you in a realm of infinite opportunities.
Help for Popular Series
Our wide inventory showcases popular games like CS2, Fortnite, Valorant, Dota 2, and Call of Duty. No matter your gaming likes, we have products that cater to the top hits in the industry.
Elevated Gaming Journey
With exclusive in-game assets, you can unlock new capabilities and exhibit your individual style. From exclusive weapon skins to strong artifacts, our offerings convert your gaming sessions into extraordinary events.
Protected and Trustworthy Transactions
We prioritize your security with protected and honest transactions. You can buy securely, knowing that your information is secure at all timeshares.
Fair Pricing
Obtain superior items without smashing the wallet. Our reasonable and equitable pricing model ensures that improving your gaming experience is available to anyone.
Easy System
Our simple system lets you to quickly search and purchase the items you want, cutting you effort and enhancing your purchase process.
What Is Ready for You at Items4Games
Find weapon skins that represent your style, special artifacts for unique achievements, and game access that reveal new areas. Our materials and objectives aid you level up easily, while balance options keep your game balance ready for engagement. Enjoy further game styles that bring diversity and complexity to your gaming plays.
In closing, Items4Games is your top source for boosting your gaming adventure with exclusive in-game products. Check out our catalog today and improve your gameplay to new levels!
Dive into the Realm of GTA 5 RP: Become a part of Our Exclusive Roleplay Server
Welcome to the thrilling realm of GTA 5 RP, where each gamer can craft their distinct story in a energetic gaming setting. Our roleplay server is suitable for those seeking an engaging and deep experience. Become part of a lively community of GTA RP aficionados and walk into this exciting world!
How to Commence Playing?
1. Buy and implement a valid version of GTA 5.
2. Install the launcher.
3. Join to the server and sign up through the game or our site to start your journey!
Our Environment: An Open World Experience
Our server provides a unique open-world environment with tailored mods that permit you to forge your illicit empire, embark on exciting missions, and shape your avatar’s story. Whether you engage with local gangs or turn into a elite cop, the possibilities are limitless!
Generate Money and Increase Your Assets
Are you ready to dominate the thoroughfares of Los Santos and acquire considerable money? We offer the resources and strategies to help you amass a fortune in the realm of GTA RP.
Gaming experience
Your Ultimate Goal for Premium In-Game Products!
In contemporary fast-paced gaming realm, the joy of adventure and development is vital. If you’re looking for unique artifacts, exclusive tool appearances, specialized modes, tokens, supplies, tasks, or user-friendly funding options, look no further! Welcome to Items4Games, your one-stop shop for a large range of superior in-game items created to boost your gaming journey.
Why Items4Games Is Exceptional
Multiple Choice of In-Game Resources
We supply a large range of in-game items, from rare designs to exclusive relics and game keys. Our catalog is customized to elevate your gameplay and submerge you in a world of infinite choices.
Backing for Well-known Titles
Our broad collection contains mainstream games like CS2, Fortnite, Valorant, Dota 2, and Call of Duty. No matter your gaming preference, we have assets that cater to the biggest successes in the sector.
Upgraded Gaming Journey
With exclusive in-game goods, you can gain new abilities and illustrate your unique look. From exclusive weapon styles to strong artifacts, our products elevate your gaming experiences into outstanding journeys.
Safe and Reliable Transactions
We value your protection with secure and trustworthy purchases. You can buy with confidence, knowing that your privacy is secure at all occasions.
Fair Fees
Access top-quality items without breaking the bank. Our fair and fair rate system ensures that improving your gaming experience is achievable to anyone.
Easy Design
Our easy-to-use design lets you to quickly explore and purchase the products you require, preserving you energy and improving your buying experience.
What Is in Store for You at Items4Games
Uncover weapon styles that show your character, unique artifacts for special achievements, and game codes that open new content. Our supplies and objectives help you improve up effortlessly, while funding services hold your game budget ready for play. Enjoy additional game styles that bring variety and depth to your gaming times.
In summary, Items4Games is your ultimate place for elevating your gaming journey with exclusive in-game goods. Check out our collection today and improve your gameplay to new heights!
Cyt Pharm: Cyt Pharm – cytotec pills buy online
Plunge into the Universe of GTA 5 RP: Join Our Unique Roleplay Server
Welcome to the thrilling universe of GTA 5 RP, where every player can develop their individual story in a dynamic gaming environment. Our roleplay server is ideal for those seeking an captivating and enveloping experience. Join a vibrant community of GTA RP aficionados and enter into this exciting world!
How to Commence Playing?
1. Purchase and set up a valid copy of GTA 5.
2. Run the launcher.
3. Connect to the server and enroll through the application or our platform to start your adventure!
Our Environment: An Open World Experience
Our server presents a distinct open-world environment with custom mods that enable you to construct your criminal kingdom, set out on thrilling missions, and form your protagonist’s journey. Whether you become part of street gangs or transform into a elite cop, the possibilities are boundless!
Generate Money and Increase Your Assets
Are you set to dominate the streets of Los Santos and earn considerable money? We supply the instruments and tactics to help you accumulate a prosperity in the realm of GTA RP.
Whatsapp的WhatsApp 網頁版应用能够轻松与朋友、家人和同事保持联系。发送消息、拨打语音,随时随地体验简单可靠的沟通方式。https://www.linawin.com,https://www.telegramppo.com,https://www.web-skypea.com
насосы купить насосы купить .
купить насос для скважины https://nasosy-msk.ru/ .
Buy Minecraft upgrades
Discover the Domain of Minecraft: Your Ultimate Persistence and Freedom Quest
Welcome to your Entrance to the Most Exciting and Interactive Minecraft Shared Encounter. Whether you’re a Designer, Battler, Traveler, or Schemer, our Platform Provides Limitless Chances to Explore Endurance and Anarchy Features in Experiences you’ve Seldom seen Before.
Why Choose Experiences in Minecraft?
Our Realm is Developed to Provide the Ultimate Minecraft Encounter, Blending Specialized Environments, Engaging Playstyle, and a Supportive Network. Traverse, Overcome, and Construct your own Quests with Tailored Components Customized for Any type of User.
Primary Components
– Survival and Freedom Modes: Encounter the Excitement of Overcoming against the odds or Step into Wild PvP Clashes with no rules and full freedom.
– Large Network Size: With Room for up to 3,750 Gamers, the Action never stops.
– 24/7 Realm Uptime: Access At All Times to Take Part In Smooth, Reliable Gameplay.
– Tailored Features: Traverse our Carefully Designed Minecraft Realms Packed with Mods, Extras, and Special Items from our Online Marketplace.
Special Mechanics Options
Persistence Feature
In Survival Option, you’ll Discover Vast Terrains, Acquire Materials, and Construct to your heart’s content. Defeat off Opponents, Collaborate with Allies, or Accept on Independent Quests where only the Skilled Overcome.
Disorder Mode
For Players Seeking Excitement and Excitement, Freedom Scenario Provides a Realm with No Boundaries. Dive in Adrenaline-Fueled PvP Engagements, Create Groups, or Challenge Enemies to Control the Zone. Here, Survival of the Most Skilled is the Only Truth.
Unique Minecraft Elements
– Quest Terrains: Explore Custom Minecraft Challenges and Adventurous Tasks.
– Economy and Exchanges: Our Interactive Economy Permits you to Exchange, Purchase, and Offer Products to Rise the Levels and Form Your Status as a Dominant User.
– Minecraft Store: Enter Special Items, Enhancements, and Tiers that Elevate your Experience.
Minecraft Inventory: Enhance Your Playstyle
Our Online Store Provides a Variety of Enhancements, Tiers, and Goods to Match every Preference. From Inexpensive Contribution Cases to Exclusive Ranks, you can Access Additional Possibilities and Bring your Adventures to the Higher Level.
Best-Selling Features
– Donate Bundles (x10) – €1.00
– VIP – €1.40
– Elysium Level – €20.00
– OWNER Level – €40.00
– BOSS Level – €60.00
Top Levels for Top Gamers
– CREATOR (€10.00) – Gain Creative Components to Unleash your Imagination.
– Vanguard (€12.00) – Exclusive Features and Special Privileges.
– Paragon (€59.10) – Exclusive Benefits for the Premier Competitor.
– Luminescent (€50.00) – Stand Out as a Iconic Figure on the Realm.
Join Our Active Minecraft Community
We Focus in Building a Welcoming, Active, and Welcoming Society. Whether you’re Completing RPG Quests, Exploring Specialized Worlds, or Competing in Interactive PvP, there’s Constantly something New to Explore.
Things You Can Look Forward To
– Friendly Group: Meet Fellow Minecraft Gamers from Globally.
– Exciting Activities: Compete in Special Tasks, Contests, and Global Contests.
– Dedicated Support: Our Staff Provides Smooth Gameplay and Guides you with any Problems.
PredPharm: prednisone pill prices – PredPharm
https://predpharm.com/# prednisone 2.5 mg cost
sildenafil oral jelly 100mg kamagra
dapoxetine online DapPharm buy priligy
minecraft addons
Discover the Realm of Minecraft: Your Ultimate Survival and Disorder Journey
Welcome to your Access to the Highly Engaging and Absorbing Minecraft Multiplayer Encounter. Whether you’re a Designer, Fighter, Explorer, or Tactician, our Platform Provides Limitless Possibilities to Take Part In Survival and Disorder Features in Ways you’ve Not seen Before.
Why Choose Explorations in Minecraft?
Our Network is Created to Bring the Top Minecraft Journey, Combining Custom Realms, Thrilling Gameplay, and a Supportive Network. Explore, Overcome, and Create your own Journeys with Exclusive Components Customized for All type of Gamer.
Essential Attributes
– Persistence and Anarchy Scenarios: Confront the Challenge of Surviving against the odds or Dive into Wild PvP Engagements with no rules and full freedom.
– Huge Platform Capacity: With Room for up to 3,750 Gamers, the Action never stops.
– 24/7 Network Uptime: Join Whenever to Take Part In Smooth, Stable Gameplay.
– Unique Resources: Explore our Expertly Created Minecraft Realms Loaded with Modifications, Plugins, and Limited Products from our Virtual Marketplace.
Unique Interaction Options
Survival Scenario
In Living Scenario, you’ll Discover Wide Terrains, Gather Resources, and Create to your heart’s content. Combat off Mobs, Team Up with Allies, or Take on Independent Challenges where only the Resilient Succeed.
Freedom Feature
For Participants Seeking Chaos and Adventure, Freedom Option Presents a Realm with No Boundaries. Dive in Adrenaline-Fueled PvP Fights, Build Partnerships, or Challenge Enemies to Control the Realm. Here, Survival of the Strongest is the Ultimate Law.
Special Minecraft Components
– Journey Maps: Navigate Custom Minecraft Challenges and Adventurous Missions.
– Economy and Exchanges: Our Community-Driven Economy Permits you to Exchange, Obtain, and Trade Goods to Rise the Positions and Create Your Status as a Strong Player.
– Minecraft Marketplace: Reach Unique Tools, Enhancements, and Tiers that Elevate your Gameplay.
Minecraft Inventory: Enhance Your Playstyle
Our In-Game Marketplace Delivers a Assortment of Improvements, Tiers, and Items to Cater To every Playstyle. From Budget-Friendly Contribution Offers to High-Tier Upgrades, you can Access New Opportunities and Take your Journey to the Higher Level.
Best-Selling Goods
– Donate Bundles (x10) – €1.00
– VIP – €1.40
– Elysium Level – €20.00
– OWNER Tier – €40.00
– BOSS Rank – €60.00
Top Ranks for Best Competitors
– CREATOR (€10.00) – Access Design Components to Unleash your Imagination.
– Vanguard (€12.00) – Elite Options and Special Perks.
– Paragon (€59.10) – Top Benefits for the Ultimate User.
– Luminescent (€50.00) – Dominate as a Legendary Figure on the Platform.
Join Our Thriving Minecraft Group
We Aim in Creating a Welcoming, Active, and Inclusive Group. Whether you’re Tackling RPG Adventures, Discovering Specialized Worlds, or Participating in Player-Driven PvP, there’s Consistently something Exciting to Experience.
Elements You Can Enjoy
– Friendly Network: Meet Fellow Minecraft Fans from Everywhere.
– Exciting Events: Compete in Exclusive Tasks, Contests, and Exclusive Events.
– Dedicated Help: Our Team Delivers Reliable Interaction and Guides you with any Concerns.
2.5 mg prednisone daily: prednisone cream brand name – prednisone 2.5 mg tab
Быстрая схема покупки диплома старого образца: что важно знать?
Ресторанный консалтинг UPSKILL https://upskilll.ru/consulting это профессиональные услуги в сфере ресторанного бизнеса: анализ рынка, аудит заведения, устранение слабых мест, обучение персонала, занимаемся наставничеством рестораторов с 2018 года.
http://predpharm.com/# Pred Pharm
prednisone over the counter australia
http://predpharm.com/# PredPharm
Kamagra Oral Jelly
cheap priligy: dap pharm – cheap priligy
ремонт стиральных машин бош цена услуги мастера по ремонту стиральных машин
It is very important that such posts appear that make you think about serious things https://zoetx.alexey-petrovich-sitnikov.ru/id-4550.html
Appanail is a cutting-edge dietary supplement specifically designed to nourish and improve the overall health of your nails and feet.
This post contains all the important thoughts that I have long wanted to hear https://vbahy.alexey-petrovich-sitnikov.ru/id-1960.html
DapPharm: cheap priligy – buy dapoxetine online
토토사이트
토토사이트 커뮤니티: 안전한 베팅을 위한 길잡이
토토사이트 커뮤니티는 스포츠 베팅을 즐기는 사람들에게 단순한 정보 공유의 장을 넘어, 안전한 배팅 환경을 조성하는 데 중요한 역할을 합니다. 이곳에서는 초보자부터 전문가까지 다양한 사람들이 모여 베팅 전략을 논의하고, 신뢰할 수 있는 토토사이트를 추천하며, 먹튀 사고를 예방하기 위한 정보를 공유합니다. 특히, 사설 토토사이트의 위험성을 알리고, 이를 피할 수 있는 방법을 제시함으로써 사용자들이 더 안전하게 베팅을 즐길 수 있도록 돕습니다.
사설 토토사이트의 숨겨진 위험
사설 토토사이트는 정부의 규제를 받지 않기 때문에 다양한 문제를 일으킬 수 있습니다. 예를 들어, 공정하지 않은 배당률, 과장된 광고, 개인정보 유출 등이 대표적인 문제점입니다. 또한, 사설 토토사이트는 법적 문제로 인해 갑자기 사라지는 경우가 많아 사용자들이 금전적 손실을 입을 위험이 큽니다. 이런 이유로, 토토 커뮤니티에서는 사설 토토사이트보다는 규제를 받는 공식 사이트를 이용할 것을 권장합니다.
토토 커뮤니티가 제공하는 가치
토토 커뮤니티는 단순히 정보를 나누는 공간이 아니라, 사용자들이 안전하게 베팅할 수 있도록 돕는 네트워크입니다. 예를 들어, 새로운 토토사이트가 등장했을 때 커뮤니티 멤버들은 해당 사이트의 운영 주체, 결제 시스템, 사용자 리뷰 등을 꼼꼼히 검토합니다. 이를 통해 먹튀 사고를 미리 방지하고, 신뢰할 수 있는 사이트만을 추천합니다. 또한, 문제가 발생했을 때는 보증 사이트를 통해 사용자들이 손실을 최소화할 수 있도록 돕습니다.
어떻게 신뢰할 수 있는 토토사이트를 찾을까?
토토 커뮤니티에서는 신뢰할 수 있는 토토사이트를 찾기 위해 몇 가지 중요한 기준을 제시합니다. 먼저, 사이트의 운영 주체가 명확한지 확인하는 것이 중요합니다. 정부나 공인된 기관에서 관리하는 사이트라면 신뢰할 수 있습니다. 또한, 다른 사용자들의 리뷰를 참고하여 사이트의 신뢰성을 판단할 수 있습니다. 긍정적인 평가가 많고, 문제가 거의 없는 사이트라면 안전하게 이용할 수 있습니다.
결제 시스템도 중요한 확인 요소 중 하나입니다. 신용카드, 전자지갑 등 다양한 결제 방법을 지원하고, SSL 암호화를 통해 금융 정보를 보호하는 사이트라면 더욱 신뢰할 수 있습니다. 마지막으로, 온라인 커뮤니티나 포럼에서 해당 사이트에 대한 평판을 확인하는 것도 좋은 방법입니다. 다른 사용자들이 어떻게 평가하는지, 문제가 없는지 꼼꼼히 살펴보는 것이 중요합니다.
토토 커뮤니티의 보증 사이트
토토 커뮤니티에서는 먹튀 사고를 예방하기 위해 보증 사이트를 추천합니다. 이러한 사이트는 사용자들의 개인정보와 금융 정보를 보호하며, 문제가 발생했을 때 빠르게 해결할 수 있는 시스템을 갖추고 있습니다. 보증 사이트를 이용하면 안전하게 베팅을 즐길 수 있으며, 만약 문제가 생기더라도 커뮤니티의 도움을 받아 해결할 수 있습니다.
마무리
토토사이트 커뮤니티는 스포츠 베팅을 즐기는 사람들에게 안전하고 신뢰할 수 있는 정보를 제공하는 중요한 공간입니다. 사설 토토사이트의 위험성을 인지하고, 신뢰할 수 있는 사이트를 선택하는 것이 무엇보다 중요합니다. 토토 커뮤니티의 정보를 참고하여 안전한 베팅 환경을 조성하고, 스포츠 베팅을 더욱 즐겁게 즐기시길 바랍니다. 항상 책임감 있게 베팅에 임하는 것도 잊지 마세요!
cannabis delivery in prague cali weed shop in prague
Kama Pharm Kama Pharm п»їkamagra
https://predpharm.com/# 80 mg prednisone daily
Kamagra 100mg price
semaglutide best price: SemaPharm24 – buy semaglutide
토토사이트 커뮤니티: 안전한 베팅을 위한 길잡이
토토사이트 커뮤니티는 스포츠 베팅을 즐기는 사람들에게 단순한 정보 공유의 장을 넘어, 안전한 배팅 환경을 조성하는 데 중요한 역할을 합니다. 이곳에서는 초보자부터 전문가까지 다양한 사람들이 모여 베팅 전략을 논의하고, 신뢰할 수 있는 토토사이트를 추천하며, 먹튀 사고를 예방하기 위한 정보를 공유합니다. 특히, 사설 토토사이트의 위험성을 알리고, 이를 피할 수 있는 방법을 제시함으로써 사용자들이 더 안전하게 베팅을 즐길 수 있도록 돕습니다.
사설 토토사이트의 숨겨진 위험
사설 토토사이트는 정부의 규제를 받지 않기 때문에 다양한 문제를 일으킬 수 있습니다. 예를 들어, 공정하지 않은 배당률, 과장된 광고, 개인정보 유출 등이 대표적인 문제점입니다. 또한, 사설 토토사이트는 법적 문제로 인해 갑자기 사라지는 경우가 많아 사용자들이 금전적 손실을 입을 위험이 큽니다. 이런 이유로, 토토 커뮤니티에서는 사설 토토사이트보다는 규제를 받는 공식 사이트를 이용할 것을 권장합니다.
토토 커뮤니티가 제공하는 가치
토토 커뮤니티는 단순히 정보를 나누는 공간이 아니라, 사용자들이 안전하게 베팅할 수 있도록 돕는 네트워크입니다. 예를 들어, 새로운 토토사이트가 등장했을 때 커뮤니티 멤버들은 해당 사이트의 운영 주체, 결제 시스템, 사용자 리뷰 등을 꼼꼼히 검토합니다. 이를 통해 먹튀 사고를 미리 방지하고, 신뢰할 수 있는 사이트만을 추천합니다. 또한, 문제가 발생했을 때는 보증 사이트를 통해 사용자들이 손실을 최소화할 수 있도록 돕습니다.
어떻게 신뢰할 수 있는 토토사이트를 찾을까?
토토 커뮤니티에서는 신뢰할 수 있는 토토사이트를 찾기 위해 몇 가지 중요한 기준을 제시합니다. 먼저, 사이트의 운영 주체가 명확한지 확인하는 것이 중요합니다. 정부나 공인된 기관에서 관리하는 사이트라면 신뢰할 수 있습니다. 또한, 다른 사용자들의 리뷰를 참고하여 사이트의 신뢰성을 판단할 수 있습니다. 긍정적인 평가가 많고, 문제가 거의 없는 사이트라면 안전하게 이용할 수 있습니다.
결제 시스템도 중요한 확인 요소 중 하나입니다. 신용카드, 전자지갑 등 다양한 결제 방법을 지원하고, SSL 암호화를 통해 금융 정보를 보호하는 사이트라면 더욱 신뢰할 수 있습니다. 마지막으로, 온라인 커뮤니티나 포럼에서 해당 사이트에 대한 평판을 확인하는 것도 좋은 방법입니다. 다른 사용자들이 어떻게 평가하는지, 문제가 없는지 꼼꼼히 살펴보는 것이 중요합니다.
토토 커뮤니티의 보증 사이트
토토 커뮤니티에서는 먹튀 사고를 예방하기 위해 보증 사이트를 추천합니다. 이러한 사이트는 사용자들의 개인정보와 금융 정보를 보호하며, 문제가 발생했을 때 빠르게 해결할 수 있는 시스템을 갖추고 있습니다. 보증 사이트를 이용하면 안전하게 베팅을 즐길 수 있으며, 만약 문제가 생기더라도 커뮤니티의 도움을 받아 해결할 수 있습니다.
마무리
토토사이트 커뮤니티는 스포츠 베팅을 즐기는 사람들에게 안전하고 신뢰할 수 있는 정보를 제공하는 중요한 공간입니다. 사설 토토사이트의 위험성을 인지하고, 신뢰할 수 있는 사이트를 선택하는 것이 무엇보다 중요합니다. 토토 커뮤니티의 정보를 참고하여 안전한 베팅 환경을 조성하고, 스포츠 베팅을 더욱 즐겁게 즐기시길 바랍니다. 항상 책임감 있게 베팅에 임하는 것도 잊지 마세요!
https://cytpharm.shop/# Abortion pills online
generic prednisone 10mg
cheap kamagra: buy Kamagra – Kama Pharm
https://kamapharm.shop/# Kama Pharm
sildenafil oral jelly 100mg kamagra
kantor bola
KANTORBOLA adalah pilihan terbaik bagi pecinta slot online. Nikmati berbagai permainan slot menarik, bonus besar, dan pengalaman bermain yang aman dan terpercaya.
generic rybelsus tabs: semaglutide tablets store – SemaPharm24
п»їkamagra: Kama Pharm – Kamagra tablets
kantorbola
KANTORBOLA adalah pilihan terbaik bagi pecinta slot online. Nikmati berbagai permainan slot menarik, bonus besar, dan pengalaman bermain yang aman dan terpercaya.
Платформа Курьер Купер https://cash-kuper.ru открывает возможности для работы в доставке. Свободный график, прозрачная система оплаты и заказы поблизости – идеальный выбор для тех, кто ищет подработку или основной заработок.
buy prednisone online without a prescription PredPharm Pred Pharm
https://semapharm24.shop/# buy rybelsus online
purchase prednisone
buy cytotec over the counter: Cyt Pharm – Cyt Pharm
http://semapharm24.com/# Sema Pharm 24
buy Kamagra
buy kamagra online usa: п»їkamagra – Kamagra 100mg price
现在Skype 網頁版提供免費通話、視訊、即時訊息和文件分享功能,讓您輕鬆保持聯繫,隨時隨地共享精彩世界。https://www.telegramppo.com,https://www.whathkapp.com,https://www.linawin.com
Kamagra 100mg price: Kama Pharm – cheap kamagra
CytPharm: Abortion pills online – buy cytotec online
http://semapharm24.com/# buy rybelsus online
prednisone 20mg nz
Онлайн покупки сигарет https://sigarety-market.ru широкий выбор, доступные цены и оперативная доставка. Закажите популярные бренды сигарет прямо на дом и оцените удобство сервиса!
п»їkamagra Kama Pharm sildenafil oral jelly 100mg kamagra
Играйте в аркадные игры в лучшем онлайн казино | Уникальные аркадные игры только здесь | Играйте в лучшие аркады на нашем сайте | Аркады и азартные развлечения в одном месте | Аркадные игры и азарт ждут вас здесь | Уникальные аркады только у нас | Играйте в лучшие аркады в онлайн казино | Побеждайте в аркадных играх и получайте призы | Онлайн казино с удивительными аркадными играми | Увлекательные аркады для ценителей азарта | Аркадные игры для всех желающих азарта | Побеждайте в аркадных баталиях и зарабатывайте деньги | Испытайте свою удачу в аркадном казино | Лучшие аркадные развлечения только у нас | Выигрывайте крупные суммы в аркадных играх | Увлекательные аркады и возможность заработать деньги
аркада казино игра arkada casino официальный сайт регистрация .
Консалтинг и обучение https://upskilll.ru для ресторанного бизнеса: развитие персонала, оптимизация процессов и повышение прибыли. Мы внедряем проверенные стратегии и передовые инструменты для роста вашего заведения.
https://predpharm.com/# Pred Pharm
Kamagra 100mg
Your blog has quickly become one of my favorites I am constantly impressed by the quality and depth of your content
kraken клир ссылка кракен тор
cheap priligy: priligy – dapoxetine online
Pred Pharm: Pred Pharm – Pred Pharm
It’s clear that you have a deep understanding of this topic and your insights and perspective are invaluable Thank you for sharing your knowledge with us
ремонт водонагревателей aeg ремонт бойлеров на дому
thc chocolate for sale in prague https://shop-cannabis-prague.com
срочно онлайн займ отказа микрозайм онлайн
rybelsus semaglutide tablets: semaglutide tablets price – semaglutide best price
https://predpharm.shop/# generic prednisone tablets
can i buy prednisone from canada without a script
prednisone 20mg tablets where to buy: Pred Pharm – PredPharm
You have a way of explaining complex topics in a straightforward and easy to understand manner Your posts are always a pleasure to read
https://cytpharm.com/# buy cytotec online
buy Kamagra
Your blog post had me hooked from the first sentence.
This blog post hit all the right notes!
pg slot
RTP PG Slot Menguntungkan dan Penting Memainkan Mesin Percobaan PG Game
Aktivitas permainan di internet semakin terkenal, dan Pragmatic Provider (Playtech Game) merupakan satu provider terbaik berkat tampilan indah, fitur kreatif, dan Return to Player (RTP) yang menguntungkan. Namun, sebelum memainkan dengan modal asli, penting untuk mencoba slot demo PG Slot. Alasannya? Ini penjelasannya.
Apa Hal Mesin Demo PG Mesin?
Slot demo adalah edisi pengujian dari game permainan dengan memakai kredit digital, tidak dana asli. Hal ini memungkinkan pemain agar memahami mekanisme permainan, fitur bonus, serta RTP tanpa potensi kerugian keuangan.
Kenapa Bermain Mesin Demo Playtech Game Penting?
Mengetahui Sistem Aktivitas
Setiap mesin mempunyai aturan dan fasilitas berbeda. Permainan versi uji memfasilitasi pemain mempelajarinya tanpa stres.
Menguji Tingkat Return to Player
Persentase Pengembalian merupakan persentase kemenangan hipotetis pada jangka panjang. Dengan versi uji, pemain bisa menyaksikan seberapa sering aktivitas menghasilkan keuntungan.
Membuat Rencana
Mesin demo memfasilitasi pemain untuk menguji rencana misalnya manajemen pertaruhan dengan tidak bahaya hilangnya modal.
Mengetahui Permainan Pilihan
Pragmatic Soft menyediakan beberapa konsep slot. Dengan menguji versi uji, kamu mampu mengetahui permainan yang cocok dengan preferensi Anda.
Mengurangi Kerugian Banyak
Bermain versi uji memudahkan kamu memahami game sebelum Anda berjudi dengan dana asli, mengurangi potensi kerugian rugi.
Keuntungan Bermain Game Percobaan Pragmatic Mesin
Tanpa adanya Bahaya Moneter: Mencoba menggunakan poin virtual, dengan tidak tekanan rugi dana.
Memperkuat Kepercayaan Sendiri: Melatih dengan demo membuat Anda lebih siap pada saat pindah ke game dengan uang sunguhan.
Mengetahui Fitur Bonus: Pelajari metode memicu fungsi bonus misalnya Free Spins dan Simbol Liar.
Menyimpan Jam serta Modal: Coba beragam slot tanpa wajib menghabiskan uang.
Tips Memainkan Permainan Demo Pragmatic Game
Konsentrasi terhadap fungsi hadiah serta cara kerjanya.
Lihatlah volatilitas slot (tinggi dan rendah).
Kelola batas jam dan juga anggaran walaupun bermain menggunakan saldo virtual.
Jelajahi beberapa tema agar mencari kesukaan kamu.
buy prednisone online from canada: Pred Pharm – Pred Pharm
buy dapoxetine online DapPharm dapoxetine online
demo pg slot
Return to Player Playtech Permainan Populer dan Penting Mencoba Permainan Versi Uji Playtech Slot
Aktivitas permainan di internet semakin terkenal, dan juga Playtech Provider (Pragmatic Mesin) merupakan salah penyedia unggulan berkat visual menawan, fasilitas kreatif, dan Return to Player (RTP) dengan tinggi. Namun, sebelum memainkan memakai modal sunguhan, perlu untuk menguji permainan demo Playtech Game. Kenapa? Berikut ulasannya.
Apa Hal Game Versi Uji PG Permainan?
Game percobaan adalah tipe percobaan pada aktivitas permainan yang memakai kredit digital, tanpa uang nyata. Ini memfasilitasi pemain supaya mengenal mekanisme permainan, fungsi insentif, serta RTP tanpa adanya potensi kerugian finansial.
Kenapa Bermain Permainan Demo Playtech Permainan Penting?
Memahami Sistem Permainan
Setiap slot mempunyai peraturan dan fasilitas berbeda. Permainan versi uji memudahkan Anda memahaminya tanpa beban.
Mengetes Level Return to Player
RTP adalah rasio hasil hipotetis pada periode panjang. Dengan versi uji, kamu dapat melihat seberapa frekuen permainan menyediakan kemenangan.
Membuat Taktik
Permainan versi uji memfasilitasi pemain untuk mengetes taktik misalnya pengaturan betting tanpa risiko rugi dana.
Mencari Slot Kesukaan
PG Soft memiliki beberapa konsep game. Menggunakan menjalankan demo, Anda dapat mencari permainan yang sesuai pada keinginan kamu.
Mencegah Rugi Signifikan
Memainkan percobaan membantu kamu memahami permainan sebelumnya bertaruh menggunakan dana asli, mengurangi potensi kerugian kehilangan.
Kelebihan Bermain Mesin Percobaan PG Game
Tanpa adanya Bahaya Moneter: Memainkan menggunakan kredit simulasi, dengan tidak beban rugi dana.
Mengembangkan Keyakinan Diri: Berlatih menggunakan percobaan menjadikan Anda semakin terbiasa ketika pindah pada permainan menggunakan dana nyata.
Mengenal Fitur Insentif: Pelajari metode menyebabkan fungsi insentif seperti Free Spins dan Wild Symbols.
Menghemat Jam dan juga Uang: Coba beberapa permainan tanpa adanya wajib menghabiskan uang.
Tips Mencoba Permainan Demo Playtech Permainan
Fokus terhadap fungsi bonus dan metode operasinya.
Lihatlah volatilitas mesin (tinggi atau juga rendah).
Atur batasan durasi dan budget meskipun bermain memakai poin simulasi.
Eksplorasi beragam konsep untuk menemukan pilihan kamu.
prednisone without prescription.net: where to buy prednisone in canada – PredPharm
https://semapharm24.com/# SemaPharm24
prednisone 50mg cost
buy dapoxetine online: dapoxetine price – priligy
5 mg prednisone daily: prednisone 10mg price in india – buy prednisone online usa
https://semapharm24.shop/# semaglutide tablets price
Kamagra 100mg price
virtual sports betting online gambling
Открывайте кейсы CS:GO Кейсы кс го с крутыми шансами на редкие скины. Удобный интерфейс, надежная система и огромный выбор кейсов сделают игру еще интереснее. Начните свой путь к топовым скинам прямо сейчас!
Kama Pharm: Kama Pharm – Kamagra 100mg price
https://semapharm24.com/# semaglutide tablets for weight loss
prednisone tablets
equilibrado de ejes
Equipos de calibración: importante para el funcionamiento uniforme y óptimo de las maquinarias.
En el entorno de la ciencia contemporánea, donde la rendimiento y la seguridad del dispositivo son de máxima trascendencia, los equipos de calibración cumplen un rol crucial. Estos aparatos específicos están diseñados para equilibrar y fijar componentes rotativas, ya sea en equipamiento de fábrica, transportes de desplazamiento o incluso en dispositivos caseros.
Para los especialistas en soporte de equipos y los técnicos, utilizar con equipos de calibración es crucial para proteger el rendimiento estable y confiable de cualquier sistema dinámico. Gracias a estas soluciones modernas sofisticadas, es posible minimizar sustancialmente las sacudidas, el sonido y la carga sobre los rodamientos, aumentando la tiempo de servicio de piezas costosos.
También importante es el papel que desempeñan los sistemas de ajuste en la asistencia al consumidor. El apoyo especializado y el soporte permanente aplicando estos equipos permiten ofrecer soluciones de óptima excelencia, mejorando la contento de los clientes.
Para los titulares de empresas, la inversión en sistemas de calibración y dispositivos puede ser importante para mejorar la efectividad y desempeño de sus sistemas. Esto es principalmente significativo para los emprendedores que dirigen pequeñas y medianas negocios, donde cada aspecto importa.
También, los dispositivos de balanceo tienen una extensa implementación en el sector de la protección y el supervisión de nivel. Permiten identificar posibles errores, impidiendo reparaciones onerosas y averías a los aparatos. Más aún, los datos recopilados de estos sistemas pueden emplearse para mejorar sistemas y incrementar la presencia en motores de búsqueda.
Las campos de utilización de los sistemas de equilibrado incluyen diversas áreas, desde la fabricación de transporte personal hasta el supervisión ambiental. No afecta si se habla de importantes manufacturas productivas o reducidos espacios hogareños, los equipos de balanceo son esenciales para proteger un rendimiento eficiente y libre de detenciones.
Dispositivos de calibración: esencial para el rendimiento fluido y óptimo de las maquinarias.
En el campo de la innovación avanzada, donde la productividad y la estabilidad del aparato son de máxima importancia, los aparatos de equilibrado juegan un rol crucial. Estos aparatos adaptados están desarrollados para equilibrar y estabilizar piezas móviles, ya sea en maquinaria productiva, vehículos de desplazamiento o incluso en electrodomésticos hogareños.
Para los técnicos en soporte de sistemas y los ingenieros, utilizar con equipos de ajuste es importante para proteger el desempeño estable y estable de cualquier dispositivo dinámico. Gracias a estas herramientas modernas modernas, es posible reducir sustancialmente las oscilaciones, el estruendo y la esfuerzo sobre los sujeciones, extendiendo la vida útil de partes importantes.
Asimismo relevante es el tarea que juegan los sistemas de ajuste en la asistencia al comprador. El asistencia especializado y el soporte constante utilizando estos aparatos facilitan brindar asistencias de excelente nivel, aumentando la bienestar de los consumidores.
Para los propietarios de proyectos, la inversión en unidades de equilibrado y medidores puede ser clave para optimizar la eficiencia y desempeño de sus sistemas. Esto es particularmente significativo para los dueños de negocios que dirigen modestas y pequeñas organizaciones, donde cada detalle cuenta.
Asimismo, los sistemas de equilibrado tienen una gran uso en el campo de la seguridad y el control de estándar. Habilitan localizar potenciales fallos, previniendo intervenciones costosas y averías a los equipos. También, los indicadores recopilados de estos sistemas pueden aplicarse para mejorar sistemas y aumentar la visibilidad en buscadores de investigación.
Las sectores de utilización de los dispositivos de equilibrado cubren diversas ramas, desde la manufactura de transporte personal hasta el monitoreo ecológico. No afecta si se considera de extensas manufacturas productivas o reducidos espacios de uso personal, los aparatos de calibración son indispensables para garantizar un funcionamiento eficiente y sin riesgo de interrupciones.
DapPharm: dapoxetine price – DapPharm
Pred Pharm prednisone in canada prednisone 250 mg
купить в челябинске аттестат
pillole per erezione immediata: Farma Sild Italy – viagra acquisto in contrassegno in italia
Откройте яркие кейсы CS:GO https://m.youtube.com/@hotdrop-case и получите шанс выиграть топовые скины! Широкий выбор кейсов, высокий шанс дропа и честная система обеспечат увлекательный опыт.
Farmacia online piГ№ conveniente: Farma Prodotti – farmacie online affidabili
https://farmaprodotti.com/# comprare farmaci online all’estero
farmacia online
Пробуйте удачу https://discord.com/invite/B5fF6pW8Cm CS:GO! Шанс получить редкие и дорогие скины, широкий выбор кейсов и удобный интерфейс делают процесс открытия легким и захватывающим.
farmacie online autorizzate elenco: Brufen senza ricetta – Farmacie on line spedizione gratuita
farmacia online
https://farmaprodotti.shop/# Farmacie online sicure
Farmacia online piГ№ conveniente
Рискни и испытай удачу https://t.me/hotdropcases Шанс получить редкие и дорогие скины, широкий выбор кейсов и удобный интерфейс делают процесс открытия легким и захватывающим.
comprare farmaci online all’estero BRUFEN prezzo Farmacia online miglior prezzo
Ваши любимые кейсы CS:GO https://t.me/s/hotdropcases в одном месте! Большой выбор, удобный интерфейс и высокая вероятность выпадения редких предметов делают процесс открытия кейсов по-настоящему захватывающим.
top farmacia online: Brufen senza ricetta – Farmacia online piГ№ conveniente
farmacia online: Cialis generico farmacia – Farmacie on line spedizione gratuita
Farmacie on line spedizione gratuita
Сервис бытовых услуг https://gidrostok-servis.ru это удобное решение для любых домашних задач. Уборка, ремонт, сантехника, установка техники и многое другое. Надежные специалисты, быстрое выполнение и доступные цены!
https://farmasilditaly.com/# viagra subito
farmacia online piГ№ conveniente
https://farmaprodotti.com/# farmacia online piГ№ conveniente
farmaci senza ricetta elenco
Your blog is a great source of positivity and inspiration in a world filled with negativity Thank you for making a difference
migliori farmacie online 2024: Ibuprofene 600 prezzo senza ricetta – top farmacia online
acquisto farmaci con ricetta: FarmaBrufen – Farmacia online miglior prezzo
farmaci senza ricetta elenco
Love this blog! The content is always so relevant and insightful, keep up the great work!
viagra 50 mg prezzo in farmacia acquisto viagra viagra prezzo farmacia 2023
I want to express my appreciation for the writer of this blog post. It’s clear they put a lot of effort and thought into their work, and it shows. From the informative content to the engaging writing style, I thoroughly enjoyed reading it.
https://farmaprodotti.shop/# Farmacie on line spedizione gratuita
farmacia online
It’s not often that we come across content that really resonates with us, but this one is a standout. From the writing to the visuals, everything is simply wonderful.
http://farmatadalitaly.com/# farmaci senza ricetta elenco
acquistare farmaci senza ricetta
viagra generico recensioni: viagra online in 2 giorni – viagra cosa serve
viagra online in 2 giorni: Viagra – viagra 50 mg prezzo in farmacia
farmacie online autorizzate elenco
https://farmabrufen.shop/# FarmaBrufen
farmacia online
лучшие аниме 2025 подборка фильмы в HD качестве без регистрации
Visit Sellvia Facebook join a community of entrepreneurs turning ideas into thriving businesses! Discover top product picks, store upgrades, and can’t-miss deals with promo coupons. Stay inspired with tips and updates to grow your dropshipping store
Visit Sellvia LinkedIn to join a community of passionate entrepreneurs transforming the dropshipping game. Get the latest updates, tips, and success stories to help you kickstart or grow your online business. Follow us and stay ahead with innovative solutions that make launching a profitable dropshipping store easy!
pillole per erezione in farmacia senza ricetta acquisto viagra pillole per erezione immediata
сериалы в 4K UHD трейлер новые фантастические фильмы бесплатно
farmaci senza ricetta elenco: Tadalafil generico migliore – п»їFarmacia online migliore
https://farmabrufen.com/# Ibuprofene 600 prezzo senza ricetta
Farmacia online miglior prezzo
farmaci senza ricetta elenco: Farma Brufen – acquistare farmaci senza ricetta
acquistare farmaci senza ricetta
Нужны деньги срочно микрокредит с быстрым одобрением и моментальным переводом на карту. Минимум документов, удобные условия и прозрачные ставки. Оформите займ прямо сейчас!
https://farmatadalitaly.shop/# farmacia online piГ№ conveniente
farmacia online
стоимость оформления таможенной декларации помощь в таможенном оформлении
Лучшие игровые промокоды рабочие промокоды на кейсы в одном месте! Активируйте бонусы, получайте подарки и прокачивайте аккаунт без лишних затрат. Следите за обновлениями, чтобы не пропустить новые промо!
Промокоды для игр https://esportpromo.com/cs2/ это бесплатные бонусы, скидки и эксклюзивные награды! Находите актуальные коды, используйте их и получайте максимум удовольствия от игры без лишних затрат.
comprare farmaci online con ricetta: Brufen senza ricetta – Farmacie on line spedizione gratuita
viagra online consegna rapida: miglior sito dove acquistare viagra – le migliori pillole per l’erezione
Farmacie online sicure
https://farmatadalitaly.com/# acquistare farmaci senza ricetta
top farmacia online
Лучшие игровые промокоды промокоды на сайт ggstandoff в одном месте! Активируйте бонусы, получайте подарки и прокачивайте аккаунт без лишних затрат. Следите за обновлениями, чтобы не пропустить новые промо!
comprare farmaci online all’estero Farmacie online sicure farmacie online autorizzate elenco
Бесплатные промокоды https://playpromocode.com/cs2/hellcase/ для ваших любимых игр! Получайте монеты, бустеры, скины и другие ценные награды. Мы собираем только проверенные коды и обновляем их каждый день.
viagra online spedizione gratuita: FarmaSildItaly – viagra generico sandoz
Farmacia online miglior prezzo: Ibuprofene 600 prezzo senza ricetta – farmacia online senza ricetta
farmacie online affidabili
https://farmaprodotti.com/# farmacie online autorizzate elenco
farmacia online senza ricetta
Your passion for what you do shines through in every post It’s truly inspiring to see someone doing what they love and excelling at it
Хотите проверить компанию https://innproverka.ru по ИНН? Наш сервис поможет узнать подробную информацию о юридических лицах и ИП: статус, финансы, руководителей и возможные риски. Защищайте себя от ненадежных партнеров!
Недвижимость на Северном Кипре https://iberiaproperty.ru выгодные инвестиции и комфортная жизнь у моря. Апартаменты, виллы и пентхаусы по доступным ценам. Поможем выбрать лучший вариант и оформить покупку.
удобный маркетплейс blacksprut сайт с высоким уровнем анонимности и надежной системой защиты. Интуитивный интерфейс, проверенные продавцы и безопасные сделки делают его лучшим выбором для покупок.
top farmacia online: BRUFEN 600 acquisto online – migliori farmacie online 2024
farmacia online piГ№ conveniente
comprare farmaci online all’estero: BRUFEN 600 acquisto online – acquistare farmaci senza ricetta
http://farmasilditaly.com/# cerco viagra a buon prezzo
comprare farmaci online all’estero
Раскрутка в соцсетях https://nakrytka.com без лишних затрат! Привлекаем реальную аудиторию, повышаем охваты и активность. Эффективные инструменты для роста вашего бренда.
acquisto farmaci con ricetta Farm Tadal Italy Farmacia online miglior prezzo
Share with us in the comments your favorite blog posts of all time!
pg slot
Persentase Pengembalian PG Mesin Gacor dan juga Kepentingan Bermain Permainan Pratinjau Playtech Slot
Aktivitas mesin online makin terkenal, dan PG Provider (Playtech Game) menjadi satu provider terkemuka dengan grafis memukau, fitur terbaru, dan juga RTP (Persentase Kemenangan) yang tinggi. Tetapi, sebelum bermain dengan modal asli, penting agar mencoba mesin demo Pragmatic Game. Alasannya? Berikut ini rinciannya.
Apa itu Itu Slot Percobaan PG Game?
Permainan demo adalah edisi pengujian pada aktivitas game dengan memakai kredit digital, bukan modal sunguhan. Hal ini memperbolehkan player supaya mengenal mekanisme game, fungsi hadiah, dan juga RTP dengan tidak bahaya finansial.
Kenapa Mencoba Slot Percobaan PG Game Esensial?
Memahami Cara Kerja Aktivitas
Tiap game mempunyai peraturan dan juga fasilitas bervariasi. Game demo memfasilitasi Anda memahaminya tanpa stres.
Menguji Persentase RTP
RTP ialah persen hasil teoritis di rentang panjang. Menggunakan percobaan, Anda dapat mengamati sejauh mana frekuen permainan menyediakan hasil.
Menyusun Strategi
Game percobaan memperbolehkan pemain agar mengevaluasi rencana misalnya pengaturan taruhan tanpa bahaya kehilangan modal.
Menemukan Slot Favorit
Pragmatic Soft menawarkan beberapa konsep mesin. Melalui menguji percobaan, kamu bisa menemukan aktivitas yang sesuai dengan keinginan pemain.
Menghindari Kerugian Besar
Bermain versi uji memudahkan kamu mengetahui aktivitas sebelumnya memasang taruhan menggunakan uang nyata, menurunkan potensi kerugian kerugian.
Manfaat Bermain Slot Pratinjau PG Slot
Tanpa Bahaya Keuangan: Mencoba dengan kredit digital, tanpa adanya beban rugi uang.
Memperkuat Rasa Percaya Diri: Mempraktikkan menggunakan versi uji menjadikan Anda lebih siap ketika pindah menuju game memakai uang sunguhan.
Memahami Fungsi Bonus: Pelajari teknik menyebabkan fitur bonus misalnya Putaran Gratis dan Simbol Wild.
Menghemat Jam serta Modal: Coba beragam mesin tanpa wajib membuang dana.
Saran Memainkan Slot Demo Pragmatic Slot
Konsentrasi pada fitur insentif dan teknik kerjanya.
Lihatlah tingkat volatilitas mesin (tinggi atau juga rendah).
Atur batas jam dan juga biaya meskipun bermain dengan saldo simulasi.
Cari tahu beragam tema agar mencari pilihan pemain.
farmacie online sicure: Farma Prodotti – farmaci senza ricetta elenco
farmacia online
farmacia senza ricetta recensioni: Viagra – viagra originale in 24 ore contrassegno
demo pg slot
Persentase Pengembalian PG Mesin Populer dan Pentingnya Menjalankan Mesin Demo Pragmatic Game
Hiburan slot daring lebih digemari, dan Playtech Provider (Pragmatic Slot) merupakan salah platform terbaik karena grafis memukau, fungsi kreatif, dan juga RTP (Return to Player) yang menguntungkan. Tetapi, sebelumnya memainkan dengan dana sunguhan, esensial untuk menguji permainan versi uji Pragmatic Game. Kenapa? Berikut penjelasannya.
Apa Fitur Slot Pratinjau PG Slot?
Mesin demo adalah edisi uji dari permainan mesin yang menggunakan kredit digital, tanpa modal nyata. Fitur ini memfasilitasi pemain agar mengetahui mekanisme aktivitas, fungsi hadiah, serta RTP dengan tidak potensi kerugian finansial.
Kenapa Bermain Permainan Pratinjau PG Permainan Perlu?
Mengetahui Cara Kerja Game
Tiap game memiliki kebijakan dan fitur beragam. Slot percobaan membantu Anda mempelajarinya tanpa adanya stres.
Mengevaluasi Persentase Return to Player
Persentase Pengembalian ialah rasio kemenangan teoritis di jangka lama. Melalui demo, Anda bisa mengamati berapa sering permainan menyediakan hasil.
Mengembangkan Taktik
Permainan versi uji memfasilitasi kamu untuk mengevaluasi taktik seperti manajemen taruhan tanpa risiko kehilangan modal.
Menemukan Game Favorit
Playtech Soft menawarkan beragam tema slot. Melalui mencoba demo, Anda mampu mencari game yang cocok untuk keinginan pemain.
Mengurangi Kehilangan Signifikan
Mencoba demo memfasilitasi pemain mengetahui permainan sebelumnya memasang taruhan dengan uang asli, meminimalkan potensi kerugian kehilangan.
Kelebihan Memainkan Permainan Percobaan Pragmatic Slot
Tanpa Risiko Keuangan: Mencoba dengan kredit virtual, tanpa beban kehilangan uang.
Meningkatkan Rasa Percaya Diri: Melatih menggunakan versi uji menjadikan kamu lebih siap ketika beralih pada game memakai dana asli.
Memahami Fitur Hadiah: Pelajari cara memicu fungsi bonus seperti Free Spins atau juga Simbol Liar.
Menyimpan Waktu dan juga Uang: Uji berbagai mesin tanpa wajib menghabiskan dana.
Tips Memainkan Game Percobaan PG Game
Konsentrasi pada fungsi insentif dan juga teknik kerjanya.
Perhatikan risiko mesin (tinggi atau juga rendah).
Susun batas waktu dan juga biaya walaupun memainkan dengan poin digital.
Cari tahu berbagai konsep untuk mencari pilihan kamu.
https://farmabrufen.com/# Farma Brufen
comprare farmaci online con ricetta
miglior sito per comprare viagra online: Farma Sild Italy – alternativa al viagra senza ricetta in farmacia
https://farmasilditaly.com/# viagra generico sandoz
top farmacia online
увлекательный сериал https://odnazhdy-v-skazketv.ru о жизни сказочных персонажей в реальном мире. Интригующий сюжет, волшебные события и неожиданные тайны. Смотрите онлайн в высоком качестве прямо сейчас!
alternativa al viagra senza ricetta in farmacia viagra prezzo kamagra senza ricetta in farmacia
farmacia online senza ricetta: Cialis generico prezzo – top farmacia online
Farmacia online miglior prezzo
farmacia online senza ricetta: Farmacie on line spedizione gratuita – comprare farmaci online con ricetta
This blog is such a hidden gem I stumbled upon it by chance and now I’m completely hooked!
http://farmaprodotti.com/# farmacie online autorizzate elenco
farmacia online senza ricetta
Your writing has a way of making me feel like I’m having a conversation with a close friend It’s so genuine and relatable
Your positive energy and enthusiasm radiate through your writing It’s obvious that you are truly passionate about what you do
It means so much to receive positive feedback and know that my content is appreciated. I strive to bring new ideas and insights to my readers.
Your posts are always so relatable and relevant to my life It’s like you know exactly what I need to hear at the right time
Your blog always leaves me feeling uplifted and inspired Thank you for consistently delivering high-quality content
Farmacia online piГ№ conveniente: comprare farmaci online con ricetta – п»їFarmacia online migliore
farmacia online piГ№ conveniente
top farmacia online: Farma Prodotti – top farmacia online
http://farmasilditaly.com/# viagra originale recensioni
farmacia online piГ№ conveniente
farmaci senza ricetta elenco BRUFEN 600 acquisto online comprare farmaci online all’estero
морские перевозки из китая https://bvs-logistica.com/perevozka-gruzov-morem.html
Современная имплантация зубов mvd-nvr.ru надежное решение для восстановления улыбки! Безопасные материалы, точная диагностика и индивидуальный подход. Верните уверенность и комфорт в жизни! Запишитесь на консультацию уже сегодня.
Интернет-магазин товаров https://vitasleep.ru для здорового сна. В ассортименте: ортопедические матрасы, подушки, одеяла, постельное белье и аксессуары от проверенных брендов. Удобный выбор, доставка по России, гарантия качества. Забота о вашем комфорте и здоровом сне!
acquisto farmaci con ricetta: Farma Brufen – farmacie online affidabili
Farmacie online sicure
http://farmabrufen.com/# FarmaBrufen
Farmacia online miglior prezzo
турецкие сериалы смотреть онлайн https://lordseriall.org
сериалы сезонов смотреть онлайн https://lordserial4.top
смотреть сериал хороший без рекламы lordserials2 net
viagra pfizer 25mg prezzo: FarmaSildItaly – viagra cosa serve
migliori farmacie online 2024
сериал онлайн 2023 смотреть зарубежные сериалы онлайн бесплатно
смотреть сериалы https://lordserial7.com
лучшие сериалы 2023 смотреть онлайн https://lordserials.cc
https://farmaprodotti.com/# farmacia online
farmacia online
viagra originale recensioni viagra farmacia alternativa al viagra senza ricetta in farmacia
viagra online spedizione gratuita: FarmaSildItaly – viagra online spedizione gratuita
viagra online in 2 giorni: Viagra – miglior sito dove acquistare viagra
farmacia online
esiste il viagra generico in farmacia: Farma Sild Italy – viagra consegna in 24 ore pagamento alla consegna
comprare farmaci online all’estero: Ibuprofene 600 prezzo senza ricetta – acquisto farmaci con ricetta
farmacie online affidabili
смотреть сериал все серии бесплатно зарубежные сериалы смотреть
farmacie online sicure Ibuprofene 600 prezzo senza ricetta top farmacia online
Логистические услуги в Москве https://bvs-logistica.com доставка, хранение, грузоперевозки. Надежные решения для бизнеса и частных клиентов. Оптимизация маршрутов, складские услуги и полный контроль на всех этапах.
сериалы 2022 онлайн сериал смотреть
Visitors come from around the world to play.: phtaya casino – phtaya login
Хотите почувствовать азарт? аркада онлайн предлагает широкий выбор игр, честную систему выигрышей и мгновенные выплаты. Захватывающие слоты и бонусы ждут вас!
http://jugabet.xyz/# Las apuestas deportivas tambiГ©n son populares.
Players enjoy a variety of table games.
Casino visits are a popular tourist attraction.: phtaya casino – phtaya.tech
The casino industry supports local economies significantly. https://taya365.art/# The gaming floors are always bustling with excitement.
Casino visits are a popular tourist attraction.: phmacao com login – phmacao com
сериал языке смотреть онлайн https://lordseriall6.org
смотреть сериалы подряд без рекламы сериалы смотреть
смотреть сериал все серии подряд https://lordsserials.org
http://jugabet.xyz/# Las promociones de fin de semana son populares.
Poker rooms host exciting tournaments regularly.
Las reservas en lГnea son fГЎciles y rГЎpidas.: winchile – win chile
High rollers receive exclusive treatment and bonuses. http://phtaya.tech/# The casino atmosphere is thrilling and energetic.
A variety of gaming options cater to everyone.: taya365 – taya365 login
http://phmacao.life/# The casino experience is memorable and unique.
Live music events often accompany gaming nights.
I appreciate how well-researched and informative each post is It’s obvious how much effort you put into your work
Visitors come from around the world to play.: phmacao.life – phmacao
Some casinos feature themed gaming areas. https://phtaya.tech/# Promotions are advertised through social media channels.
Leave a comment and let us know what your favorite blog post has been so far!
http://phmacao.life/# Live dealer games enhance the casino experience.
Players must be at least 21 years old.
Check out Sellvia https://www.instagram.com/sellvia.dropshipping/ on Instagram for the hottest product ideas, store upgrades, and exclusive deals! Stay in the loop with our latest dropshipping tips and grab promo coupons to boost your business.
Loyalty programs reward regular customers generously.: phtaya casino – phtaya login
п»їCasinos in the Philippines are highly popular.: taya777 register login – taya777 app
High rollers receive exclusive treatment and bonuses. https://jugabet.xyz/# La seguridad es prioridad en los casinos.
https://phmacao.life/# The Philippines has a vibrant nightlife scene.
Live dealer games enhance the casino experience.
The Philippines offers a rich gaming culture.: taya777 app – taya777
http://taya365.art/# Many casinos have beautiful ocean views.
Casino visits are a popular tourist attraction.
Responsible gaming initiatives are promoted actively. http://winchile.pro/# Las promociones de fin de semana son populares.
The thrill of winning keeps players engaged.: phmacao com login – phmacao casino
https://phtaya.tech/# A variety of gaming options cater to everyone.
Cashless gaming options are becoming popular.
Players enjoy both fun and excitement in casinos.: phmacao – phmacao casino
Slot machines feature various exciting themes. https://taya365.art/# Gambling can be a social activity here.
https://taya365.art/# The ambiance is designed to excite players.
The Philippines has a vibrant nightlife scene.
Las ganancias son una gran motivaciГіn.: jugabet.xyz – jugabet casino
taya777 taya777 register login Responsible gaming initiatives are promoted actively.
Players must be at least 21 years old.: taya777 register login – taya777
The full special bip39 Word List consists of 2048 words used to protect cryptocurrency wallets. Allows you to create backups and restore access to digital assets. Check out the full list.
Slot machines attract players with big jackpots. http://taya365.art/# Promotions are advertised through social media channels.
http://winchile.pro/# Las tragamonedas ofrecen grandes premios.
Many casinos host charity events and fundraisers.
Many casinos host charity events and fundraisers.: taya365 com login – taya365.art
https://phmacao.life/# Visitors come from around the world to play.
The Philippines offers a rich gaming culture.
Online gaming is also growing in popularity.: phmacao com – phmacao.life
Manila is home to many large casinos. http://phmacao.life/# Players can enjoy high-stakes betting options.
Reliable and unique bip39 Word List contains 2048 words needed to create seed phrases in crypto wallets. Allows you to safely manage private keys and guarantees the possibility of recovering funds.
Your words have the power to change lives and I am grateful for the positive impact you have had on mine Thank you
A variety of gaming options cater to everyone.: taya365.art – taya365.art
What other topics would you like to see covered on the blog? Let us know in the comments!
I want to express my appreciation for the writer of this blog post. It’s clear they put a lot of effort and thought into their work, and it shows. From the informative content to the engaging writing style, I thoroughly enjoyed reading it.
hemp for sale in prague buy weed
http://phmacao.life/# Manila is home to many large casinos.
Gambling regulations are strictly enforced in casinos.
Players enjoy both fun and excitement in casinos.: taya777.icu – taya777 login
Poker rooms host exciting tournaments regularly. http://taya365.art/# Resorts provide both gaming and relaxation options.
Resorts provide both gaming and relaxation options.: taya365 com login – taya365.art
http://taya777.icu/# Cashless gaming options are becoming popular.
п»їCasinos in the Philippines are highly popular.
Casino visits are a popular tourist attraction.: phmacao – phmacao club
Many casinos provide shuttle services for guests. https://taya777.icu/# п»їCasinos in the Philippines are highly popular.
http://jugabet.xyz/# Las ganancias son una gran motivaciГіn.
Promotions are advertised through social media channels.
Cashless gaming options are becoming popular.: taya777 login – taya777
Reliable and unique bip39 Word List contains 2048 words needed to create seed phrases in crypto wallets. Allows you to safely manage private keys and guarantees the possibility of recovering funds.
thc joint in prague https://sale-weed-prague.com
Online gaming is also growing in popularity.: taya365 com login – taya365 login
http://phtaya.tech/# Loyalty programs reward regular customers generously.
The Philippines has several world-class integrated resorts.
1xBet promo code https://www.kreditesvik.com/how-to-redeem-the-promo-code-for-1xbet-for-maximum-3/ your chance to get bonuses on bets, free bets and exclusive promotions! Enter the code during registration and start playing with an increased deposit.
The Philippines has a vibrant nightlife scene.: taya365 com login – taya365 com login
This is one of my go-to blogs for inspiration Whether it’s fashion, travel, or self-improvement, you cover it all flawlessly
Ремонт компьютеров и ноутбуков https://remcomp89.ru в Новом Уренгое – быстрые и качественные услуги! Диагностика, настройка, замена комплектующих, восстановление данных. Гарантия на работу, доступные цены и выезд мастера!
https://jugabet.xyz/# Las mГЎquinas tragamonedas tienen temГЎticas diversas.
The poker community is very active here.
Casinos offer delicious dining options on-site.: phtaya casino – phtaya casino
whispeara is a premium, all-natural supplement crafted to support and enhance both hearing and cognitive function.
http://taya777.icu/# Poker rooms host exciting tournaments regularly.
Slot machines feature various exciting themes.
Используйте актуальный промокод 1xbet и получите увеличенный бонус на первый депозит! Делайте ставки на спорт, играйте в казино и пользуйтесь эксклюзивными предложениями. Легкая регистрация и моментальные выплаты!
Looking for the current spinbetter promo code? Get bonus funds for bets and casino games. Easy activation, favorable conditions and real winnings are waiting for you. Hurry to use it!
Las reservas en lГnea son fГЎciles y rГЎpidas.: winchile casino – win chile
The Philippines offers a rich gaming culture.: phtaya login – phtaya
https://winchile.pro/# La competencia entre casinos beneficia a los jugadores.
п»їCasinos in the Philippines are highly popular.
Casino visits are a popular tourist attraction.: taya365 – taya365.art
Gambling can be a social activity here.: taya777 login – taya777
phtaya phtaya login Some casinos feature themed gaming areas.
https://jugabet.xyz/# Las apuestas mГnimas son accesibles para todos.
The casino industry supports local economies significantly.
Prostavive is a natural supplement designed to support men’s prostate health. It aids in maintaining optimal urinary function and alleviates discomfort associated with an enlarged prostate.
Thank you for providing a positive and constructive space for discussion It’s refreshing to see a blog with a kind and respectful community
http://phmacao.life/# п»їCasinos in the Philippines are highly popular.
A variety of gaming options cater to everyone.
The most comprehensive bip39 for securely creating and restoring cryptocurrency wallets. Learn how mnemonic coding works and protect your digital assets!
Loyalty programs reward regular customers generously.: taya365 com login – taya365 login
Love this appreciation for great content
Los jugadores deben conocer las reglas.: winchile.pro – winchile
https://taya777.icu/# Players can enjoy high-stakes betting options.
Many casinos host charity events and fundraisers.
Entertainment shows are common in casinos. http://winchile.pro/# Los pagos son rГЎpidos y seguros.
Players often share tips and strategies.: phtaya.tech – phtaya
Los casinos organizan noches de trivia divertidas.: winchile – winchile casino
Ищете квартиру в новом доме? новостройки Украина – это современные жилые комплексы, доступные цены, рассрочка и ипотека. Подберите идеальное жилье от надежных застройщиков!
http://winchile.pro/# Los jugadores deben jugar con responsabilidad.
A variety of gaming options cater to everyone.
Most casinos offer convenient transportation options.: taya777 register login – taya777 register login
The poker community is very active here.: phmacao com – phmacao.life
Продажа инструментов для дома инструменты купить цены строительства и ремонта! Огромный выбор ручного и электроинструмента, выгодные цены, акции и быстрая доставка. Найдите все необходимое в одном месте!
https://taya777.icu/# Gambling regulations are strictly enforced in casinos.
Many casinos provide shuttle services for guests.
I love how this blog covers a variety of topics, making it appeal to a diverse audience There is something for everyone here!
Prostavive is a natural supplement designed to support men’s prostate health. It aids in maintaining optimal urinary function and alleviates discomfort associated with an enlarged prostate.
п»їCasinos in the Philippines are highly popular. http://phmacao.life/# A variety of gaming options cater to everyone.
Algunos casinos tienen programas de recompensas.: winchile casino – win chile
Use the proven bip39 standard to protect your assets and easily restore access to your finances. A complete list of 2048 mnemonic words used to generate and restore cryptocurrency wallets.
https://phmacao.life/# Casinos often host special holiday promotions.
A variety of gaming options cater to everyone.
Prostavive is a natural supplement designed to support men’s prostate health. It aids in maintaining optimal urinary function and alleviates discomfort associated with an enlarged prostate.
Muchos casinos ofrecen restaurantes y bares.: jugabet – jugabet casino
https://taya777.icu/# Online gaming is also growing in popularity.
Gambling regulations are strictly enforced in casinos.
Players must be at least 21 years old.: phtaya.tech – phtaya.tech
Sitio web de fans https://rodri.com.mx de Rodri Hernandez: Descubre la carrera y logros del mediocampista espanol del Manchester City. Noticias, estadisticas y analisis del juego de uno de los mejores futbolistas actuales.
http://phmacao.life/# Players enjoy both fun and excitement in casinos.
Entertainment shows are common in casinos.
п»їCasinos in the Philippines are highly popular.: phmacao com – phmacao com login
Sitio fan de Mohamed Salah mohamed salah ultimas noticias, records, entrevistas y los mejores momentos de la carrera de uno de los futbolistas mas grandes de la actualidad. ?Mantente al tanto!
Some casinos feature themed gaming areas.: taya777 register login – taya777 login
easy canadian pharm: global pharmacy canada – easy canadian pharm
casino en ligne france 2024 amon casino en ligne
foreign pharmacy no prescription https://megaindiapharm.com/# MegaIndiaPharm
mexico drug stores pharmacies: buying from online mexican pharmacy – reputable mexican pharmacies online
canadian pharmacy discount coupon https://discountdrugmart.pro/# online pharmacy prescription
Try your luck at pinup casino! The best slots, roulette, blackjack and live games with real dealers. Pleasant bonuses, promotions and a user-friendly interface will create ideal conditions for the game!
canada pharmacy world: easy canadian pharm – easy canadian pharm
pharmacy without prescription http://familypharmacy.company/# Online pharmacy USA
Mega India Pharm: indian pharmacy – Online medicine order
code promo casino en ligne https://annuaire-des-casinos.com
canadian online pharmacy no prescription http://xxlmexicanpharm.com/# medication from mexico pharmacy
New full Bip39 2048 words used to create and restore crypto wallets. Multi-language support, high security and ease of use to protect your funds.
easy canadian pharm: canadian drugs pharmacy – easy canadian pharm
no prescription needed pharmacy http://easycanadianpharm.com/# canadian world pharmacy
Cheapest online pharmacy: Cheapest online pharmacy – family pharmacy
promo code for canadian pharmacy meds http://familypharmacy.company/# Cheapest online pharmacy
best canadian pharmacy no prescription https://easycanadianpharm.shop/# legit canadian pharmacy
easy canadian pharm: easy canadian pharm – reputable canadian online pharmacy
casino en ligne le plus payant casino en ligne francais
Your blog post was really enjoyable to read, and I appreciate the effort you put into creating such great content. Keep up the great work!
As someone who struggles with mental health, I appreciate the support and empathy displayed in your blog It means a lot to know I’m not alone
cheapest prescription pharmacy https://megaindiapharm.com/# indianpharmacy com
easy canadian pharm: canadian compounding pharmacy – canadian pharmacy ratings
Промокод казино https://japasquare.app/blogs/2550/betwinner-promo-code-2025-unlock-enhanced-game-odds-with-lucky2win активируйте эксклюзивные бонусы! Получите фриспины, бонусные деньги на депозит и кешбэк. Используйте актуальные коды для максимальной выгоды в онлайн-казино. Играйте с лучшими условиями!
Current casino promo codes https://www.saffireblue.ca/wp-includes/articles/melbet_promokod_pri_registracii___bonus_kod_na_segodnya.html bonus money, free spins and cashback for playing. Use verified codes, activate exclusive offers and win more!
Online pharmacy USA: Best online pharmacy – family pharmacy
rxpharmacycoupons https://familypharmacy.company/# online pharmacy no prescription needed
rx pharmacy no prescription http://familypharmacy.company/# online pharmacy delivery usa
xxl mexican pharm: п»їbest mexican online pharmacies – xxl mexican pharm
Ищете выгодные покупки? нова маркетплейс предлагает широкий выбор товаров по привлекательным ценам! Безопасные сделки, удобный интерфейс и проверенные продавцы – все для комфортного шопинга.
геотехнический расчет plaxis https://otsenka-vliyaniya-stroitelstva.ru
Лучшие промокоды для казино https://sangistil.ru/wp-includes/pgs/sovety_po_prohoghdeniyu_igry_divinity_orginal_sin_2_prohoghdenie_igry_141.html активируйте бонусные предложения и получите больше шансов на выигрыш. Бесплатные спины, дополнительные деньги на баланс и персональные акции ждут вас!
canadian pharmacy discount code https://xxlmexicanpharm.com/# xxl mexican pharm
Присоединяйтесь к NovaXLtd.live https://novaxltd.live платформе с широкими возможностями и удобными инструментами. Доступность, надежность, поддержка!
Откройте новые возможности https://sindicate24-4.biz! Удобный сервис, быстрые решения и выгодные предложения для пользователей.
india pharmacy: MegaIndiaPharm – top online pharmacy india
best online pharmacy no prescription https://discountdrugmart.pro/# discount drug pharmacy
xxl mexican pharm: xxl mexican pharm – xxl mexican pharm
Продажа сигарет орис купить сигареты в интернет-магазине – оригинальные бренды, доступные цены, удобные способы оплаты и быстрая доставка. Сделайте заказ сегодня!
Откройте все возможности актуальная ссылка bs2best Большой выбор товаров, безопасные сделки и простая навигация. Приватность и защита пользователей на первом месте.
online pharmacy non prescription drugs https://megaindiapharm.com/# п»їlegitimate online pharmacies india
canadian pharmacies not requiring prescription https://megaindiapharm.com/# MegaIndiaPharm
easy canadian pharm: easy canadian pharm – easy canadian pharm
no prescription required pharmacy https://xxlmexicanpharm.com/# reputable mexican pharmacies online
xxl mexican pharm: п»їbest mexican online pharmacies – xxl mexican pharm
fatih koparan tayland
canadian pharmacy no prescription needed http://familypharmacy.company/# Online pharmacy USA
discount drug pharmacy: discount drug pharmacy – drugstore com online pharmacy prescription drugs
canadian pharmacy coupon http://megaindiapharm.com/# MegaIndiaPharm
mail order pharmacy india: Mega India Pharm – Mega India Pharm
ทดสอบ เครื่องสล็อต PG คือสิ่งใด? เพราะอะไร จึงกลายเป็น เกมที่นิยม?
เกมออนไลน์สล็อต ถือเป็นเกมที่ เป็นที่ชื่นชอบ อย่างแพร่หลาย ในทุกยุคทุกสมัย รวมทั้ง นับเป็น หนึ่งใน เกมที่มีผู้คน รู้จักกันดี และยัง หลงใหล อย่างมาก ในโลกของ เกมดิจิทัล แต่ ผู้ที่ยังเป็นอยู่ มือใหม่ หรือก็คือ มีประสบการณ์ การเล่นสล็อต น้อย วันนี้พวกเรา จะพาคุณ มาทำความรู้จักกับ เล่นฟรี เกมสล็อต PG ซึ่ง เกมสล็อตโดยตรง ที่เป็นที่นิยม อย่างแพร่หลาย โดย คุณจะได้ ศึกษาหรือเรียนรู้ รวมทั้ง เริ่มการเล่น ได้อย่างรวดเร็ว และยัง มีความสุข พร้อมกับ ความรู้สึก การเล่นเกมออนไลน์ ที่สนุก และ น่าตื่นตาตื่นใจ
ทดสอบ สล็อตแมชชีน PG คืออะไร?
เล่นฟรี เครื่องสล็อต PG ถือเป็นเกม สล็อตออนไลน์ ที่พัฒนาขึ้น จาก บริษัท PG Soft ที่ หนึ่งในจำนวน ผู้พัฒนา เกมออนไลน์สล็อต ชั้นนำระดับโลก ในโลก เกมดังกล่าว ได้รับแรงบันดาลใจ จากเกม เครื่องเล่นเกมสล็อต แบบดั้งเดิม แต่ เพิ่มเติม ความใหม่ รวมทั้ง ความสนุกสนาน เข้าไปในระบบ ผ่าน เกมสล็อต มีอยู่ 5 รีลแนวตั้ง พร้อมทั้ง 15 รูปแบบการชนะ รูปแบบการชนะ ซึ่ง ผู้เล่นออนไลน์ มีโอกาสในการ รับรางวัล ได้หลายครั้ง
สัญลักษณ์ในเกม ในเกมนี้ สล็อต PG นั้นมี มีหลายแบบ เช่นได้แก่ รูปเชอร์รี่, ไอคอน 7, ไอคอนเพชร, รวมทั้ง ไอคอน อื่นๆอีกมากมาย ที่เกี่ยวข้องกับ กับรูปแบบของ เกมสล็อต ซึ่งแต่ละ แต่ละเกม จะมี รูปแบบ และยัง รูปแบบการเล่นเกม ที่ต่างกัน ออกไปจากเดิม เช่นเช่น ธีมป่า, ธีมเทพเจ้าในตำนาน, ธีมการกิน, หรือก็คือ ธีมการสำรวจ เป็นต้นมา
เพราะอะไร เล่นฟรี เกมสล็อต PG จึงเป็นที่นิยม เกมที่ได้รับความนิยม?
ความง่ายดาย ในการเล่นเกมออนไลน์
ทดลองเล่น เกมสล็อต PG คือเกม ที่ง่ายต่อการเข้าใจ ไม่สลับซับซ้อน เหมาะกับ ผู้ที่เพิ่งเริ่ม และ ผู้ที่ชำนาญ ผู้เล่นสล็อต เพียงเท่านั้น เลือกจำนวน จำนวนเดิมพัน กดเล่น รวมทั้ง รอลุ้น ผลลัพธ์ที่ได้ ซึ่ง ระบบเกม ที่เข้าใจง่าย ทำให้คุณ ผู้เล่น สามารถ เพลิดเพลินไปกับ ได้โดยไม่ต้อง ไม่ต้องกังวลใจ เกี่ยวกับเรื่อง กฎ ที่ยุ่งเหยิง
รูปแบบการให้ การแจกเงินรางวัล ที่หลายรูปแบบ
เกมสล็อตออนไลน์ PG มีอยู่ เพย์ไลน์ ให้ชนะรางวัล มากถึง 15 รูปแบบการได้รางวัล ซึ่งส่งผลให้ มากกว่า เกมสล็อตคลาสสิก ทั่วไป ส่งผลให้ ผู้เล่น มีโอกาสในการ ชนะรางวัล ได้บ่อยครั้ง นอกจากนั้น ยังมีให้เลือก ฟีเจอร์เพิ่มเติม เช่นเช่น การหมุนฟรีสปิน, ตัวคูณ, และ โบนัส ที่เพิ่มเข้าไป ความสนุก ให้กับ การเล่นสล็อต
Свежие промокоды казино https://www.volvoclub.ru/pages/articles/1xbet_promokod_pri_registracii_na_segodnya_besplatno.html бонусы, фриспины и эксклюзивные акции от топовых платформ! Найдите лучшие предложения, активируйте код и выигрывайте больше.
Нужен опытный мануальный терапевт Пушкино? Помогаю при остеохондрозе, грыжах, искривлениях позвоночника и болях в суставах. Безопасные техники, профессиональный подход, запись на прием!
ลองเล่น เกมสล็อต PG คืออะไร? ด้วยเหตุใด จึงเป็นที่นิยม เกมที่ได้รับความนิยม?
เกมสล็อตออนไลน์ คือเกมที่ เป็นที่ชื่นชอบ มาก ในทุกสมัย และยัง เป็น หนึ่งในบรรดา เกมที่มีผู้คน รู้จักดี และ ชอบ ที่สุด ในแวดวง เกมออนไลต์ แต่ในกรณีของ ผู้ที่ยังเป็น ผู้ที่ยังไม่ชำนาญ หรือก็คือ มีทักษะ การเล่นสล็อต เพียงเล็กน้อย วันนี้เราจะ จะแนะนำคุณ มาทำความเข้าใจ ทดลองเล่น สล็อต PG ที่ เกมสล็อตที่ไม่ผ่านเอเย่นต์ ที่เป็นที่นิยม อย่างสูง ด้วย คุณจะสามารถ เรียนรู้ และ เริ่มเล่นเกม ได้โดยเร็ว พร้อมกับ สนุก พร้อมกับ ประสบการณ์ใหม่ การเล่น ที่ท้าทาย และ น่าทึ่ง
ลองเล่น เครื่องสล็อต PG คืออะไรกันแน่?
ลองเล่น สล็อตแมชชีน PG จัดเป็นเกม สล็อตออนไลน์ ที่ถูกพัฒนา โดยบริษัท บริษัทผู้พัฒนา PG Soft ซึ่งถือเป็น หนึ่งในบรรดา ผู้พัฒนา เกมสล็อตบนอินเทอร์เน็ต ชั้นนำระดับโลก ทั่วโลก เกมดังกล่าว ได้แนวคิด มาจาก เครื่องเล่นสล็อต แบบเดิม แต่ได้ เพิ่มเข้าไป ความทันสมัยและความสนุก และยัง ความสนุก เข้าไปในเกม ด้วย เกมนี้ ประกอบด้วย 5 แถวแนวตั้ง และยัง 15 รูปแบบการชนะ รูปแบบการชนะ ที่ ผู้เล่นเกม มีโอกาสในการ ได้รับรางวัล ได้มากมาย
ไอคอน ในเกมนี้ สล็อต PG นั้น มีหลายรูปแบบ เช่น ผลเชอร์รี่, ไอคอน 7, รูปเพชร, และ ไอคอน อื่นๆ ที่เชื่อมโยง กับแนวคิด เกมดังกล่าว ซึ่งแต่ละ แต่ละเกมสล็อต มีอยู่ รูปแบบของ และ รูปแบบการเล่นสล็อต ที่แตกต่าง ออกไปจากเดิม เช่นเช่น ธีมสัตว์, ธีมเทพเจ้า, ธีมอาหาร, หรือ ธีมผจญภัย เป็นต้นไป
ทำไม ทดลองเล่น เครื่องสล็อต PG จึงกลายเป็น เกมที่ได้รับความนิยม?
ความง่ายดาย ในการเล่นเกม
ทดสอบ เกมสล็อต PG ถือเป็นเกม ที่เข้าใจง่าย ไม่ยาก เหมาะกับ ผู้ที่เพิ่งเริ่ม และยัง มือเก่า ผู้เล่น เพียงแค่ เลือกจำนวน จำนวนเงินเดิมพัน กดปุ่มสปิน รวมทั้ง รอลุ้นผล ผล ซึ่ง ระบบการเล่นสล็อต ที่ตรงไปตรงมา ทำให้ ผู้เล่น สามารถได้ สนุก ได้โดยที่ ไม่ต้องกังวลใจ เกี่ยวกับเรื่อง กฎเกณฑ์ต่างๆ ที่ซับซ้อน
รูปแบบการ การแจกเงินรางวัล ที่หลากหลาย
เกมออนไลน์สล็อต PG มีอยู่ รูปแบบการได้รางวัล ให้รับรางวัล มากถึง 15 แบบ ที่ มากกว่าทั่วไป สล็อตแมชชีนคลาสสิก ทั่วไปทั่วๆไป ส่งผลให้ ผู้เล่น มีโอกาสที่จะ รับรางวัล ได้หลายครั้ง นอกจากนี้ยัง ยังมีอยู่ ฟีเจอร์เสริม เช่น การเล่นฟรี, ตัวคูณเงินรางวัล, รวมทั้ง รางวัลโบนัส ที่เพิ่มเติม ความตื่นเต้น ให้แก่ การเล่น
canadian pharmacy discount code http://megaindiapharm.com/# MegaIndiaPharm
Keep up the amazing work! Can’t wait to see what you have in store for us next.
cheapest pharmacy for prescription drugs https://easycanadianpharm.com/# easy canadian pharm
legit non prescription pharmacies https://familypharmacy.company/# family pharmacy
easy canadian pharm: easy canadian pharm – my canadian pharmacy reviews
mexico pharmacies prescription drugs: xxl mexican pharm – mexico drug stores pharmacies
Защитите авто от коррозии https://antikorauto.ru антикоррозийная обработка и кузовной ремонт с гарантией. Восстановление геометрии кузова, покраска, удаление вмятин. Долговечность и качество по доступным ценам!
Жарким летним утром Вася Муфлонов, заядлый рыбак из небольшой деревушки, собрал свои снасти и отправился на местное озеро. День обещал быть необычайно знойным, солнце уже в ранние часы нещадно припекало.
Вася расположился в укромном месте среди камышей, где, по его наблюдениям, всегда водилась крупная рыба. Забросив удочку, он погрузился в привычное для рыбака созерцательное состояние. Время текло медленно, поплавок лениво покачивался на водной глади, но рыба словно избегала его приманки.
Ближе к полудню, когда жара достигла своего пика, произошло то, чего Вася ждал все утро – поплавок резко ушёл под воду. После недолгой борьбы на берегу оказался огромный серебристый карп, какого Вася никогда раньше не ловил.
Радости рыбака не было предела, но огорчало одно – он не взял с собой фотоаппарат, чтобы запечатлеть этот исторический момент. Тут в голову Васи пришла необычная идея. Он аккуратно положил карпа себе на грудь и прилёг на песчаный берег под палящее солнце. “Пусть загар оставит память об этом улове”, – подумал находчивый рыбак.
Через час, когда Вася поднялся с песка, на его загорелой груди отчётливо виднелся светлый силуэт пойманной рыбы – точная копия его трофея. Теперь у него было неопровержимое доказательство его рыбацкой удачи.
История о необычном способе запечатлеть улов быстро разлетелась по деревне. С тех пор местные рыбаки в шутку стали называть этот метод “фотография по-муфлоновски”. А Вася, демонстрируя друзьям необычный загар, с улыбкой рассказывал о своём изобретательном решении.
Эта история стала местной легендой, и теперь каждое лето молодые рыбаки пытаются повторить трюк Васи Муфлонова, создавая на своих телах “загорелые фотографии” своих уловов. А сам Вася стал известен не только как умелый рыбак, но и как человек, способный найти нестандартное решение в любой ситуации.
buy online casino casino software for sale
pharmacy coupons https://megaindiapharm.com/# MegaIndiaPharm
Every time I read one of your posts, I come away with something new and interesting to think about. Thanks for consistently putting out such great content!
Hookah and tobacco shop https://black-shisha-hookahs.shop huge assortment, top brands, best tastes! Coal, bowls, flasks and other accessories for the perfect hookah relaxation. Fast delivery and promotions!
Fast and secure VPS https://evps.host for any task! Flexible configurations, SSD drives, DDoS protection. Easy scaling, high performance and 24/7 support!
us pharmacy no prescription https://familypharmacy.company/# Cheapest online pharmacy
family pharmacy: Best online pharmacy – Best online pharmacy
Mega India Pharm: Mega India Pharm – Mega India Pharm
Download Aviator Game https://sites.google.com/view/aviatorgamedownload/ experience thrilling gameplay with real-time bets and high multipliers! Play on Android, iOS, or PC. Fast installation, exciting features, and big wins await!
All about Karim Benzema karim benzema biography, achievements, main goals and career moments. Find out how the striker conquered Real Madrid and continues to shine in world football!
All about Karim Benzema karim-benzema biography, achievements, main goals and career moments. Find out how the striker conquered Real Madrid and continues to shine in world football!
All about Vinicius Junior vinicius-junior-bd.com career, trophies, highlights and records. Follow the Brazilian winger, his success at Real Madrid and on the international stage!
mail order prescription drugs from canada https://discountdrugmart.pro/# discount drug mart
reputable online pharmacy no prescription https://xxlmexicanpharm.com/# buying from online mexican pharmacy
discount drug mart pharmacy: drug mart – pharmacy coupons
MegaIndiaPharm: top 10 pharmacies in india – indian pharmacy paypal
cheapest pharmacy for prescriptions https://easycanadianpharm.com/# pharmacy in canada
arkada casino бонусы за регистрацию arkada casino бонусы для новичков
xxl mexican pharm: mexico drug stores pharmacies – xxl mexican pharm
pharmacy discount coupons http://xxlmexicanpharm.com/# xxl mexican pharm
no prescription required pharmacy https://megaindiapharm.shop/# Mega India Pharm
White Screen Online is a simple yet effective online tool that turns your screen into a bright white canvas—perfect for detecting dead pixels, reducing eye strain, or even as a makeshift light source.
xxl mexican pharm: medicine in mexico pharmacies – xxl mexican pharm
xxl mexican pharm xxl mexican pharm mexico drug stores pharmacies
Kevin De Bruyne kevin de bruyne az com is the leader of the Manchester City and Belgium national team midfield. Find out all about his achievements, matches, awards and records in world football!
скачать зимний самп скачать сайт самп
foreign pharmacy no prescription https://megaindiapharm.com/# MegaIndiaPharm
Mega India Pharm: indian pharmacies safe – MegaIndiaPharm
cheapest pharmacy for prescription drugs https://megaindiapharm.shop/# MegaIndiaPharm
mexico pharmacies prescription drugs: mexican drugstore online – reputable mexican pharmacies online
Download https://sites.google.com/view/aviatorgamedownload/ and get a chance to win big! Watch the coefficient grow, fix the bet in time and win. Convenient application and dynamic gameplay are waiting for you. Available for PC and mobile devices!
Подарки и сувениры из камня https://kameshki51.ru статуэтки, шкатулки, часы, панно, изделия из мрамора, гранита и оникса. Ручная работа, уникальный дизайн, доставка по России!
online pharmacy without prescription https://discountdrugmart.pro/# discount drugs
Как побороть лудоманию Мой опыт избавления от игровой зависимости история глазами прошедшего это испытание и несколько советам тем, кто в середине пути или столкнулся с этим через друзей и близких. Описываю в статье как Вавада помогла мне избавиться от игровой зависимости
xxl mexican pharm: reputable mexican pharmacies online – best online pharmacies in mexico
prescription drugs online https://megaindiapharm.shop/# india online pharmacy
Окунитесь в азарт с aviator-slot.ru Уникальная игра с захватывающим геймплеем и возможностью сорвать крупный выигрыш. Следите за коэффициентом, вовремя забирайте ставку и умножайте баланс. Испытайте удачу прямо сейчас!
I appreciate how this blog promotes self-growth and personal development It’s important to continuously strive to become the best version of ourselves
discount drug mart drugmart canadian pharmacies not requiring prescription
Новости музыки Украины https://musicnews.com.ua популярные жанры, тренды и полезные советы для музыкантов. Узнавайте больше о мире музыки и развивайте свои навыки!
legal online pharmacy coupon code https://familypharmacy.company/# online pharmacy delivery usa
mexico drug stores pharmacies: xxl mexican pharm – xxl mexican pharm
As someone who struggles with mental health, I appreciate the support and empathy displayed in your blog It means a lot to know I’m not alone
online canadian pharmacy reviews: canadianpharmacyworld com – easy canadian pharm
offshore pharmacy no prescription https://familypharmacy.company/# family pharmacy
canadian pharmacy no prescription needed https://easycanadianpharm.com/# easy canadian pharm
Online pharmacy USA: Best online pharmacy – canadian pharmacy coupon code
pharmacy discount coupons http://xxlmexicanpharm.com/# mexican drugstore online
Все о легкой атлетике athletics-ru.ru История развития, основные дисциплины, рекорды, тренировки и современные тенденции. Узнайте больше о королеве спорта!
maple leaf pharmacy in canada: easy canadian pharm – easy canadian pharm
Zeus vs Hades zeus-vs-hades-download ru эпичная битва богов! Игровой автомат с грозными бонусами, фриспинами и множителями. Выберите сторону Зевса или Аида и сорвите большой выигрыш!
pharmacy coupons https://discountdrugmart.pro/# discount drug mart pharmacy
no prescription required pharmacy: no prescription needed pharmacy – canadian prescription pharmacy
Cassino online Pin Up https://888casino-official-brazil.site ganhos sem limites! Jogue seus caca-niqueis favoritos, participe de torneios, ganhe cashback e rodadas gratis. Licenca, seguranca e pagamentos rapidos!
online pharmacy no prescription https://megaindiapharm.com/# indian pharmacy online
canadian pharmacy coupon http://xxlmexicanpharm.com/# xxl mexican pharm
easy canadian pharm: easy canadian pharm – easy canadian pharm
reputable online pharmacy no prescription https://familypharmacy.company/# family pharmacy
Свежие и актуальные новости https://sugar-news.com.ua Украины и мира! Будьте в курсе последних событий, аналитики и трендов. Читайте последние новости Украины онлайн!
canada pharmacy not requiring prescription https://familypharmacy.company/# Online pharmacy USA
discount drug mart pharmacy: discount drug pharmacy – discount drug pharmacy
cbd gummy present a convenient and enjoyable route to face the effects of this compound. These gummies fingers on in diverse flavors, potencies, and formulations, providing users with controlled dosing and long-lasting effects. Innumerable consumers rise them as a service to relaxation, stress relief. Putting, it’s portentous to waste them responsibly, as effects may take longer to recoil in compared to smoking or vaping. Forever verification dosage guidelines and insure compliance with nearby laws sooner than purchasing or consuming.
canadian pharmacy coupon code https://discountdrugmart.pro/# discount drug pharmacy
kompletni relokace firem stehovani s durazem na odbornost
Лучшие эксперты в одном месте! орган по сертификации сертификата маркетплейс и агрегатор экспертных компаний помогает найти надежных специалистов по разным направлениям. Удобный выбор, проверенные отзывы и рейтинг!
best no prescription pharmacy https://discountdrugmart.pro/# discount drug mart
canadian pharmacy coupon https://familypharmacy.company/# Online pharmacy USA
stehovani clanky profesionalni vyklizeni
foreign pharmacy no prescription http://easycanadianpharm.com/# easy canadian pharm
п»їbest mexican online pharmacies: xxl mexican pharm – mexico drug stores pharmacies
non thc cbd gummies present a nearby and enjoyable disposition to face the effects of this compound. These gummies fingers on in various flavors, potencies, and formulations, providing users with controlled dosing and long-lasting effects. Many consumers recognize them for the purpose moderation, anguish relief. However, it’s prominent to digest them responsibly, as effects may take longer to kick in compared to smoking or vaping. Everlastingly voucher dosage guidelines and certify compliance with local laws in the forefront purchasing or consuming.
cheapest pharmacy prescription drugs http://easycanadianpharm.com/# reliable canadian pharmacy
canadian pharmacy coupon https://discountdrugmart.pro/# discount drug mart pharmacy
Хотите играть в Steam-игры shared steam org дешевле? Shared-Steam.org предлагает аренду аккаунтов с топовыми играми. Безопасность, доступность и удобство – ваш гейминг без границ!
Slot klasik tetap menjadi favorit banyak orang: slot demo – demo slot pg
Permainan slot bisa dimainkan dengan berbagai taruhan http://bonaslot.site/# Slot menawarkan berbagai jenis permainan bonus
Create images deep nude generator easily with AI. Remove clothes from anyone in the image and enjoy their nakedness.
https://bonaslot.site/# Slot dengan tema budaya lokal menarik perhatian
Pemain bisa menikmati slot dari kenyamanan rumah https://slot88.company/# Kasino mendukung permainan bertanggung jawab
Mesin slot baru selalu menarik minat http://preman69.tech/# Mesin slot baru selalu menarik minat
Turkiye Slotlar Rehberi Kazandran slotlar En Iyi Slotlar ve Casinolar! Nerede oynayabileceginizi, hangi oyunlarn populer oldugunu ve bonuslar nasl alabileceginizi ogrenin. Oyun alanlar ve guncel eglencelere dair kapsaml bir genel baks!
Turkiye’deki slot makineleri gercek para icin slotlar gercek parayla oynanabilen slotlar kapsaml bir baks! Nerede oynan?r, hangi slotlar en karldr ve en iyi casino nasl secilir Kumar severler icin ipuclar, incelemeler, derecelendirmeler ve bonuslar!
http://bonaslot.site/# Kasino di Indonesia menyediakan hiburan yang beragam
Keseruan bermain slot selalu menggoda para pemain https://garuda888.top/# Banyak kasino memiliki program loyalitas untuk pemain
Your passion for this topic shines through in your writing It’s clear that you put a lot of effort and thought into your posts Thank you for sharing your knowledge with us
вывоз старой мебели грузоперевозки минск
Kasino selalu memperbarui mesin slotnya: slot demo – slot demo gratis
Slot klasik tetap menjadi favorit banyak orang http://preman69.tech/# Kasino memiliki suasana yang energik dan menyenangkan
http://garuda888.top/# Banyak kasino menawarkan permainan langsung yang seru
For anyone looking for an easy way to download Metamask and use it safely, https://download.metaredi.org/ is the best resource. Their guides help both beginners and advanced users navigate the setup process efficiently.
Знакомства в Уфе https://ufavip.sbs с нашей платформой стали еще проще, можно встретить девушек, готовых к интересному общению и приятному времяпрепровождению. Здесь каждый найдет то, что ищет: от легкого флирта до серьезных отношений.
перевозка грузов минск москва https://perevozimgruz.by
Mesin slot sering diperbarui dengan game baru http://slotdemo.auction/# Pemain sering berbagi tips untuk menang
Banyak pemain menikmati jackpot harian di slot: slot88 – slot 88
https://garuda888.top/# Kasino mendukung permainan bertanggung jawab
Kasino di Bali menarik banyak pengunjung https://preman69.tech/# Kasino di Bali menarik banyak pengunjung
Slot memberikan kesempatan untuk menang besar https://preman69.tech/# Mesin slot menawarkan berbagai tema menarik
slotdemo slot demo Kasino sering memberikan hadiah untuk pemain setia
https://bonaslot.site/# Jackpot progresif menarik banyak pemain
Временная регистрация в Москве – быстро и надежно!
Нужна временная прописка для работы, учебы или оформления документов?
Оформим официальную регистрацию в Москве всего за 1 день. Без очередей,
с гарантией и юридической чистотой!
1. Подходит для граждан РФ и СНГ
2. Регистрация от 3 месяцев до 5 лет
3. Легально, с внесением в базу МВД
Работаем без предоплаты! Документы можно получить лично или дистанционно.
Доступные цены, оперативное оформление!
Звоните или пишите в WhatsApp прямо сейчас – поможем быстро и без лишних вопросов!
Временная регистрация в Москве
Is it possible to win at Lucky Jet? We analyze the main strategies, analyze player reviews, and give an honest assessment of the popular game. Read to avoid mistakes and increase your chances of success!
перевозки https://perevozimgruz.by/kvartirnyi-pereezd/
Slot dengan pembayaran tinggi selalu diminati https://garuda888.top/# Kasino sering memberikan hadiah untuk pemain setia
Mesin slot menawarkan berbagai tema menarik: bonaslot.site – BonaSlot
http://bonaslot.site/# Slot menawarkan berbagai jenis permainan bonus
Mesin slot dapat dimainkan dalam berbagai bahasa http://slotdemo.auction/# Slot dengan tema film terkenal menarik banyak perhatian
Кружевной бюстгальтер https://www.wildberries.ru/catalog/117605496/detail.aspx без косточек с застежкой спереди — это идеальный выбор для тех, кто ценит комфорт и стиль. Изготовленный из мягкого и нежного кружева, он обеспечивает естественную поддержку, не ограничивая движения. Удобная застежка спереди позволяет легко надевать и снимать бюстгальтер, а его изысканный дизайн добавляет нотку романтики в ваш образ.
?El paraiso del juego en Pin Up Casino https://ganar-apuestas-deportivas.com te espera! Echa un vistazo a nuestra coleccion de tragamonedas, juegos en vivo y juegos de mesa. Bonos rentables, torneos y un programa VIP te proporcionaran el maximo de emociones. ?Empieza a jugar ahora y gana!
Slot dengan fitur interaktif semakin banyak tersedia: slot88.company – slot88
https://garuda888.top/# Slot dengan tema film terkenal menarik banyak perhatian
Mesin slot digital semakin banyak diminati http://preman69.tech/# Banyak pemain menikmati bermain slot secara online
Срочный онлайн займ srochno-zaym-online.ru современный способ быстро получить взаймы необходимую сумму на личные нужды на небольшой срок.
Vega Casino официальный сайт регистрация вега казино
Каталог финансовых организаций https://srochno-zaym-online.ru в которых можно получить срочные онлайн займы и кредиты не выходя из дома.
Your latest blog post was truly inspiring and had some great insights. I can’t wait to see what else you have in store.
hd rezka сериалы фэнтези на айфоне бесплатные фильмы онлайн бесплатно
офисный переезд грузоперевозки минск
Banyak pemain menikmati jackpot harian di slot https://preman69.tech/# Banyak pemain mencari mesin dengan RTP tinggi
Kasino mendukung permainan bertanggung jawab: slot88 – slot88
http://preman69.tech/# Banyak pemain berusaha untuk mendapatkan jackpot
услуги грузоперевозок перевозкка бытовой техники
Slot menawarkan berbagai jenis permainan bonus http://bonaslot.site/# Banyak pemain menikmati bermain slot secara online
Kasino sering memberikan hadiah untuk pemain setia: garuda888 – garuda888.top
Slot dengan pembayaran tinggi selalu diminati https://bonaslot.site/# Banyak kasino memiliki program loyalitas untuk pemain
https://slot88.company/# Mesin slot menawarkan pengalaman bermain yang cepat
Mesin slot digital semakin banyak diminati: slot 88 – slot88
Каталог финансовых организаций srochno-zaym-online.ru в которых можно получить срочные онлайн займы и кредиты не выходя из дома.
онлайн-кинотеатр HD-720 в хорошем качестве hdrezka рейтинг фильмов
Slot dengan pembayaran tinggi selalu diminati http://slotdemo.auction/# Slot dengan tema budaya lokal menarik perhatian
Mesin slot sering diperbarui dengan game baru: slot88 – slot88.company
Форум для кулинаров https://food-recipe.ru и рестораторов! Лучшие рецепты, тренды гастрономии, обсуждения ресторанного бизнеса. Общайтесь, делитесь опытом и вдохновляйтесь новыми идеями. Присоединяйтесь к нашему кулинарному сообществу!
Slot dengan tema film terkenal menarik banyak perhatian https://slot88.company/# Slot menawarkan berbagai jenis permainan bonus
Красивые поздравления https://photofile.ru/otkrytki-so-svechami-vechnaya-i-svetlaya-pamyat-110-kartinok в одном месте! Огромный выбор картинок и открыток для любого повода. День рождения, юбилей, профессиональные праздники – найдите идеальное поздравление!
https://preman69.tech/# Mesin slot dapat dimainkan dalam berbagai bahasa
Slot dengan bonus putaran gratis sangat populer: preman69 slot – preman69 slot
Новый уникальный маркетплейс NOVA, есть все! Москва, Питер, всегда свежие клады!Акция для новых магазинов – продай на 1 млн, получи 100к!Приглашаем к сотрудничеству рекламодателей!
I’m gone to say to my little brother, that he should also pay a quick visit this weblog on regular basis to obtain updated from most recent news.
I was able to find good info from your content.
Wyoming Valley Equipment LLC
Kasino di Indonesia menyediakan hiburan yang beragam https://bonaslot.site/# Pemain bisa menikmati slot dari kenyamanan rumah
Your positivity and enthusiasm are contagious Reading your blog has become a part of my daily routine and I always leave feeling better than when I arrived
Your writing is so engaging and easy to read It makes it a pleasure to visit your blog and learn from your insights and experiences
https://slot88.company/# Pemain harus memahami aturan masing-masing mesin
резка боевики новинки с озвучкой hdrezka смотреть фантастика hd онлайн
автоматы с бесплатным депозитом демо бонуски
Маркетплейс нового поколения https://x-nova.live уникальный сервис для удобных покупок и продаж. Интеллектуальный поиск, персонализированные рекомендации и безопасность сделок – все для вашего комфорта!
Kasino menyediakan layanan pelanggan yang baik: preman69.tech – preman69
Slot menawarkan kesenangan yang mudah diakses http://garuda888.top/# Kasino di Bali menarik banyak pengunjung
https://slotdemo.auction/# Kasino di Bali menarik banyak pengunjung
Mesin slot menawarkan pengalaman bermain yang cepat https://slotdemo.auction/# Kasino memiliki suasana yang energik dan menyenangkan
Banyak kasino memiliki promosi untuk slot: preman69 slot – preman69
I had no idea how to download Metamask, but https://metamaker.org/#metamask-download provided a clear guide. Now I can use my crypto wallet without any issues.
http://bonaslot.site/# Kasino memiliki suasana yang energik dan menyenangkan
Banyak pemain mencari mesin dengan RTP tinggi https://bonaslot.site/# Permainan slot bisa dimainkan dengan berbagai taruhan
Pemain sering mencoba berbagai jenis slot: bonaslot – bonaslot.site
https://garuda888.top/# Slot dengan tema film terkenal menarik banyak perhatian
Kasino di Bali menarik banyak pengunjung: slot88 – slot88
Jackpot besar bisa mengubah hidup seseorang https://bonaslot.site/# Slot dengan tema film terkenal menarik banyak perhatian
http://bonaslot.site/# Slot dengan tema film terkenal menarik banyak perhatian
Mesin slot menawarkan berbagai tema menarik: demo slot pg – slot demo rupiah
Kasino memiliki suasana yang energik dan menyenangkan https://garuda888.top/# Mesin slot menawarkan berbagai tema menarik
http://garuda888.top/# Banyak kasino memiliki program loyalitas untuk pemain
романтические фильмы 2025 бесплатно кино в HD Netflix 2025
Современный маркетплейс https://nova7.top для выгодных покупок! Огромный ассортимент, лучшие цены и удобные способы оплаты. Покупайте качественные товары и заказывайте с быстрой доставкой!
Новый формат маркетплейса https://nova4.top быстро, удобно, надежно! Лучшие предложения, современные технологии и простой интерфейс. Покупайте и продавайте легко, экономя время и деньги!
Slot menawarkan kesenangan yang mudah diakses: slotdemo – slot demo
Banyak pemain mencari mesin dengan RTP tinggi http://slotdemo.auction/# Kasino memiliki suasana yang energik dan menyenangkan
https://bonaslot.site/# Kasino selalu memperbarui mesin slotnya
Slot dengan grafis 3D sangat mengesankan: garuda888 slot – garuda888 slot
http://bonaslot.site/# Banyak pemain menikmati jackpot harian di slot
Сауна очищает организм https://sauna-broadway.ru выводя токсины через пот, укрепляет иммунитет благодаря перепадам температуры, снимает стресс, расслабляя мышцы и улучшая кровообращение. Она делает кожу более упругой, ускоряет восстановление после тренировок, улучшает сон и создаёт атмосферу для общения.
Портал с ответами https://online-otvet.site по всем школьным домашним предметам. Наши эксперты с легкостью ответят на любой вопрос, и дадут максимально быстрый ответ.
Руководство по настройке https://amnezia.dev VPN-сервера! Пошаговые инструкции для установки и конфигурации безопасного соединения. Узнайте, как защитить свои данные и обеспечить анонимность в интернете. Настройте VPN легко!
Slot menjadi daya tarik utama di kasino http://preman69.tech/# Pemain sering berbagi tips untuk menang
Временная регистрация в Москве – быстро и надежно!
Нужна временная прописка для работы, учебы или оформления документов?
Оформим официальную регистрацию в Москве всего за 1 день. Без очередей,
с гарантией и юридической чистотой!
1. Подходит для граждан РФ и СНГ
2. Регистрация от 3 месяцев до 5 лет
3. Легально, с внесением в базу МВД
Работаем без предоплаты! Документы можно получить лично или дистанционно.
Доступные цены, оперативное оформление!
Звоните или пишите в WhatsApp прямо сейчас – поможем быстро и без лишних вопросов!
Временная регистрация в Москве
slot88.company slot88 Kasino di Jakarta memiliki berbagai pilihan permainan
Kasino selalu memperbarui mesin slotnya: slot demo pg gratis – slotdemo
Православный форум https://prihozhanka.ru для женщин! Общение о вере, молитве, семье, воспитании и роли женщины в православии. Делитесь мыслями, находите поддержку и вдохновение в теплой атмосфере!
Korean cosmetics http://zqykj.com/bbs/home.php?mod=space&uid=284858 perfect skin without effort! Innovative formulas, Asian traditions and visible results. Try the best skin care products right now!
Your writing is so eloquent and persuasive You have a talent for getting your message across and inspiring meaningful change
http://garuda888.top/# Slot menjadi daya tarik utama di kasino
Banyak kasino memiliki promosi untuk slot https://garuda888.top/# Kasino sering memberikan hadiah untuk pemain setia
Kasino sering mengadakan turnamen slot menarik http://garuda888.top/# Kasino mendukung permainan bertanggung jawab
Banyak pemain berusaha untuk mendapatkan jackpot: slot88 – slot 88
Your vulnerability and honesty in your posts is truly admirable Thank you for being so open and authentic with your readers
Your posts are like a breath of fresh air I appreciate how you tackle difficult topics with grace and empathy
I appreciate how well-researched and informative each post is It’s obvious how much effort you put into your work
amoxicillin medicine: buying amoxicillin in mexico – generic amoxicillin
https://zekond.com/read-blog/127585
|
https://zithropharm.shop/# zithromax 500mg
where can i get generic clomid without a prescription: ClmHealthPharm – order clomid pills
where can i buy amoxicillin without prec: amoxicillin 500mg price canada – cheap amoxicillin 500mg
Wow, I had never thought about it in that way before You have really opened my eyes to a new perspective Keep up the great work!
buy azithromycin zithromax: ZithroPharm – zithromax 500 mg for sale
You have a way of making each of your readers feel seen and heard That’s a special quality that not all bloggers possess Thank you for creating a safe space for us
Хочешь купить ПАВ в Москве? Нова маркетплейс – ищи в Яндекс!
Хочешь купить ПАВ в СПБ? Нова маркетплейс – ищи в Яндекс!
https://zithropharm.com/# generic zithromax india
buy cheap amoxicillin online: amoxicillin 500mg capsule buy online – amoxicillin 500 mg online
doxycycline 120mg: Dox Health Pharm – otc doxycycline no prescription
where to buy cheap clomid without rx: ClmHealthPharm – how to buy cheap clomid prices
buying generic clomid ClmHealthPharm cost of clomid without prescription
https://doxhealthpharm.com/# cheap doxycycline 100mg
can i buy doxycycline over the counter in south africa: doxycycline india – 40mg doxycycline prices
buy amoxicillin online without prescription: can you buy amoxicillin over the counter in canada – buy amoxicillin 500mg canada
how to get amoxicillin: AmoHealthPharm – buy amoxicillin from canada
Your honesty and vulnerability in sharing your personal experiences is truly admirable It takes courage to open up and I applaud you for it
The 1xBet promo code: “1XRUN200” best offers new users a 100% sports bonus up to $130 or a casino bonus up to $1950 +150 free spins, appealing to both sports bettors and casino players. To access your account, visit the 1xBet website and log in. Then, go to the “Promo” section to check your bonus balance, and visit the Promo Code Store to select a promo code for your preferred sports.
1XBET promo code for 2025: 1XRUN200, simply enter code in the registration form to receive an EXCLUSIVE welcome bonus of 100%, up to €130. To maximize bonuses on 1xbet, use promo code goldenjulius when registering your account. After your initial deposit, you’ll receive a 100% bonus.
1xbet free spin promo code
Your blog is a ray of sunshine in a sometimes dark and dreary world Thank you for spreading positivity and light
Prostavive is a uniquely crafted dietary supplement aimed at promoting healthy blood sugar levels.
can you buy doxycycline over the counter in mexico: DoxHealthPharm – doxycycline 40 mg capsules
I admire how this blog promotes kindness and compassion towards ourselves and others We could all use a little more of that in our lives
http://doxhealthpharm.com/# doxycycline for dogs
This is one of my go-to blogs for inspiration Whether it’s fashion, travel, or self-improvement, you cover it all flawlessly
This blog post is packed with great content!
outdoor lighting control systems smart lighting technology
Сауна очищает организм https://sauna-broadway.ru выводя токсины через пот, укрепляет иммунитет благодаря перепадам температуры, снимает стресс, расслабляя мышцы и улучшая кровообращение. Она делает кожу более упругой, ускоряет восстановление после тренировок, улучшает сон и создаёт атмосферу для общения.
azithromycin zithromax: Zithro Pharm – buy azithromycin zithromax
профессиональный лечебный массаж Ивантеевка расслабляющие техники для здоровья и красоты. Помогаем снять стресс, улучшить кровообращение и восстановить силы. Запишитесь прямо сейчас!
amoxicillin over counter amoxicillin discount order amoxicillin online
https://clmhealthpharm.shop/# can i get generic clomid without dr prescription
Glucotonic is a uniquely crafted dietary supplement aimed at promoting healthy blood sugar levels.
clomid without a prescription: can you buy generic clomid without prescription – where can i buy cheap clomid without a prescription
zithromax online australia: Zithro Pharm – buy zithromax 1000mg online
can i buy doxycycline in india: Dox Health Pharm – doxycycline 631311
бездепозитные слоты слоты бездепозитный бонус
Женский онлайн портал https://brjunetka.ru для вдохновения! Полезные советы по стилю, уходу за собой, здоровью и семейной жизни. Будьте в курсе трендов, находите мотивацию и делитесь опытом!
Портал с ответами https://online-otvet.site на все школьные предметы! Быстро находите решения по математике, русскому, физике, биологии и другим дисциплинам. Готовые ответы, разборы задач и помощь в учебе для всех классов
Glucotonic is a uniquely crafted dietary supplement aimed at promoting healthy blood sugar levels.
https://clmhealthpharm.shop/# buying generic clomid
tg boost https://smm-panel-cheap.com
Элитный коттеджный поселок https://parkville-zhukovka-poselok.ru в Жуковке! Просторные дома, свежий воздух, развитая инфраструктура и удобная транспортная доступность. Создайте уютное пространство для жизни в живописном месте!
stehovani pruvodce stehovani po Praze
where to buy generic clomid for sale: how can i get cheap clomid no prescription – can i order cheap clomid pills
amoxicillin price canada: buy amoxicillin without prescription – where to buy amoxicillin
zithromax z-pak price without insurance: can you buy zithromax over the counter in australia – where can i get zithromax
zithromax over the counter canada ZithroPharm zithromax 500mg price
buy doxycycline 100mg online uk: doxycycline antibiotic – doxycycline 100mg
http://clmhealthpharm.com/# where to get cheap clomid for sale
boost service smm panel cheap
Все о строительстве https://decor-kraski.com.ua и ремонте в одном месте! Подробные инструкции, идеи для дизайна, выбор материалов и советы мастеров. Сделайте свой дом удобным, стильным и долговечным!
Портал про строительство https://goodday.org.ua и ремонт! Полезные советы, обзоры материалов, технологии строительства, лайфхаки для дома. Узнайте, как сделать ремонт качественно и сэкономить на строительных работах!
how much is doxycycline: Dox Health Pharm – buy doxycycline online
doxycycline 2984: doxycycline 40 mg india – doxycycline 400 mg tablet
doxycycline hyclate 100 mg capsules: DoxHealthPharm – buy doxycycline 100mg
https://clmhealthpharm.shop/# can i get generic clomid online
Your writing is so relatable and down-to-earth It’s like having a conversation with a good friend Thank you for always being real with your readers
Портал для строителей https://hotel.kr.ua и домашних мастеров! Полезные статьи, новинки рынка, лайфхаки по ремонту и рекомендации по выбору качественных материалов.
Ремонт и строительство https://inbound.com.ua без хлопот! Полезные лайфхаки, новинки в дизайне, технологии строительства и подбор лучших материалов. Создайте комфортное жилье легко и выгодно!
Ваш надежный помощник https://insurancecarhum.org в ремонте! Практичные советы, инструкции и секреты профессионалов. Узнайте, как сделать качественный ремонт и выбрать лучшие строительные материалы!
amoxicillin 500 mg tablet price amoxicillin 250 mg price in india amoxicillin 500 mg tablets
discount doxycycline: doxycycline 400 mg tablet – doxycycline 100mg capsules cost
doxycycline usa: Dox Health Pharm – buying doxycycline uk
Инструкции по ремонту https://makprestig.in.ua подбор материалов, планирование, дизайн и советы экспертов. Станьте мастером своего дома!
Лучший портал по строительству https://itstore.dp.ua и ремонту! Гайды по отделке, рекомендации экспертов, новинки дизайна и проверенные решения. Все для вашего комфорта!
where to buy clomid online: ClmHealthPharm – where can i buy generic clomid without a prescription
Как сделать ремонт https://oo.zt.ua правильно? Наш портал поможет выбрать материалы, спланировать бюджет и создать уютный интерьер. Простые решения для сложных задач!
https://zithropharm.shop/# zithromax 500 mg for sale
buying cheap clomid without dr prescription: cost of clomid – where can i get clomid without rx
Казино ирвин зеркало
Казино ирвин зеркало
Онлайн казино ирвин зеркало по праву гордится коллекцией слотов, позволяют мгновенно перевести средства на ваш игровой счет. В казино регулярно проводятся акции с крупными призовыми фондами от топовых провайдеров. При условии ставок на реальные деньги посетители получают возможность оформить выплату средств со счета. Игроки призывают к внимательному прочтению правил и условий, который регистрируется и начинает играть в казино, являетесь ли вы новичком или опытным игроком. Пользователи могут указать реальное местоположение, функциональность и общее качество услуг казино. Если услуга не была подключена во время создания аккаунта, а возврат средств автоматически поступит на ваш счёт.
ирвин казино
Эта функция доступна через Irwin Casino сайт и мобильные приложения, телефонный звонок или электронную почту. Независимо от того, второй бонус в комплекте для новых пользователей, но и с помощью мобильного казино ирвин зеркало, повышенные лимиты на вывод средств и приоритетное обслуживание. Наконец, предоставляя игрокам возможность познакомиться с функционалом казино без необходимости вкладывать личные средства. В письмах приходят персональные бонусы и адреса зеркал, если написать в службу технической поддержки.
irwin casino онлайн
Только так можно гарантировать безопасность и надежность ресурса. Следите за акциями и специальными предложениями, использующие мобильные приложения, которая в рекордные сроки стала набирать обороты популярности во многих странах мира. Пополнение счета доступно через различные платёжные системы.
Профессиональные советы https://ukk.kiev.ua по ремонту и строительству! Пошаговые инструкции, актуальные тренды и лучшие решения для обустройства вашего жилья.
Идеи для дома https://ucmo.com.ua ремонта и строительства! Полезные советы, лайфхаки и современные технологии, которые помогут сделать ремонт качественно и доступно.
Ремонт без стресса https://panorama.zt.ua Готовые решения, полезные лайфхаки, выбор материалов и идеи для дома. Делаем ремонт комфортным и доступным!
doxycycline cap price: DoxHealthPharm – how to get doxycycline online
Идеи для дома https://ucmo.com.ua ремонта и строительства! Полезные советы, лайфхаки и современные технологии, которые помогут сделать ремонт качественно и доступно.
Делаем ремонт правильно https://zarechany.zt.ua Разбираем все этапы – от выбора материалов до дизайна интерьера. Подробные инструкции и лайфхаки от специалистов!
Автомобильный портал https://nerjalivingspace.com для автолюбителей! Новости автоиндустрии, обзоры автомобилей, тест-драйвы, полезные советы по ремонту и тюнингу. Будьте в курсе последних трендов и находите ответы на все авто-вопросы!
where can i get zithromax over the counter: Zithro Pharm – zithromax prescription online
http://clmhealthpharm.com/# get generic clomid without rx
cost of amoxicillin prescription: buy amoxicillin 250mg – amoxicillin 250 mg capsule
Все для женщин https://elegance.kyiv.ua в одном месте! Секреты красоты, советы по стилю, отношениям, психологии, здоровью и кулинарии. Будьте вдохновленными и уверенными каждый день!
Женский портал https://beautyadvice.kyiv.ua для современной женщины! Мода, красота, здоровье, отношения, кулинария и карьера. Полезные советы, тренды и вдохновение для тех, кто хочет быть в курсе новинок и заботиться о себе!
Онлайн мир женщины https://gracefullady.kyiv.ua красота, здоровье, успех! Полезные лайфхаки, тренды моды, секреты счастья и гармонии. Портал для тех, кто хочет быть лучшей версией себя!
buy amoxicillin 500mg: AmoHealthPharm – ampicillin amoxicillin
doxycycline rx: doxycycline acne – doxycycline 100mg tablets
http://clmhealthpharm.com/# where can i buy clomid without a prescription
Портал для современной https://femaleguide.kyiv.ua женщины! Открой для себя новые идеи в моде, красоте, отношениях и саморазвитии. Полезные статьи и советы для комфортной и счастливой жизни
Мир женщины https://fashionadvice.kyiv.ua красота, здоровье, успех! Полезные лайфхаки, тренды моды, секреты счастья и гармонии. Портал для тех, кто хочет быть лучшей версией себя!
Твой гид в мире https://happywoman.kyiv.ua женственности и гармонии! Узнай больше о моде, косметике, фитнесе, отношениях и мотивации. Все, что нужно для яркой и счастливой жизни!
doxycycline price uk: doxycycline vibramycin – buy doxycycline 100mg capsules online
zithromax generic price: Zithro Pharm – can i buy zithromax over the counter in canada
buy zithromax online australia: Zithro Pharm – zithromax 250 mg pill
http://zithropharm.com/# zithromax without prescription
purchase zithromax z-pak: where can i buy zithromax medicine – zithromax buy
Актуальные зеркала BlackSprut https://kra26.cat Заходите без проблем, обходите блокировки и пользуйтесь сайтом без VPN. Мы следим за обновлениями и всегда предоставляем свежие ссылки.
Безопасный доступ к сайту https://bsme-at.at без ограничений. Рабочие зеркала позволяют обходить блокировки без VPN, обеспечивая стабильную связь и удобный интерфейс. Следите за обновлениями, чтобы всегда оставаться в сети.
Всегда актуальные ссылки https://bs2bet.at для входа. Обходите блокировки легко и быстро, используя надёжные зеркала. Свежие обновления позволяют заходить без VPN и сохранять полную анонимность.
Проблемы с входом https://bs2best.or.at Найдите актуальные зеркала и заходите без ограничений. Мы обновляем ссылки ежедневно, обеспечивая быстрый и безопасный доступ без необходимости использования VPN.
What topics would you like to see covered in future posts? Let us know in the comments.
amoxicillin online pharmacy: Amo Health Pharm – amoxicillin buy online canada
Keep up the fantastic work and continue to inspire us all!
how to buy clomid without a prescription: ClmHealthPharm – can you buy generic clomid online
BlackSprut это инновационный https://bs2best.cat маркетплейс с расширенным функционалом и полной анонимностью пользователей. Современные технологии защиты данных, удобный интерфейс и высокая скорость обработки заказов делают покупки безопасными и простыми. Покупайте без риска и продавайте с максимальной выгодой на BlackSprut!
BlackSprut крупнейший маркетплейс https://bb2best.at где можно найти всё, что вам нужно. Надёжная система безопасности, удобная навигация, широкий ассортимент товаров. Анонимные покупки, моментальные сделки и выгодные условия для продавцов.
BlackSprut передовой маркетплейс https://m-bsme.at с высокими стандартами безопасности и удобной системой поиска. Анонимность, быстрая оплата и честные продавцы – всё, что нужно для комфортных покупок. Мы гарантируем защиту ваших данных и качественное обслуживание. Присоединяйтесь к BlackSprut и открывайте новые возможности!
Professional painting services https://www.seattlesbestpainters.com for offices and industrial facilities. We will update the interior of your office or perform high-quality painting of production facilities, warehouses, hangars.
This blog is like a safe haven for me, where I can escape the chaos of the world and indulge in positivity and inspiration
This blog is like a virtual mentor, guiding me towards personal and professional growth Thank you for being a source of inspiration
acheter mГ©dicament en ligne sans ordonnance https://pharmaciemeilleurprix.com/# pharmacies en ligne certifiГ©es
проверенный маркетплейс https://bsme.cat предлагающий товары на любой вкус. Простая регистрация, быстрая оплата и защита сделок. Убедитесь в качестве сервиса сами!
Blacksprut – современная площадка https://bs-bsme.at для безопасных покупок. Большой выбор категорий, продуманная система рейтингов и отзывов. Заходите и находите нужное легко!
Blacksprut – онлайн-маркетплейс https://bsmc.at с лучшими предложениями. Надёжные продавцы, защищённые сделки, удобный поиск. Оцените удобство покупок уже сегодня!
Ищете актуальные промокоды на фриспины? Мы собираем лучшие предложения: фриспины, бонусы за депозит, бездепозитные акции и кэшбэк. Получите максимум выгоды от игры!
pharmacie en ligne france livraison belgique: acheter kamagra site fiable – pharmacie en ligne france livraison belgique
Replica Uhren https://www.imailen.com in Deutschland schnell und sicher per DHL Nachnahme bestellen. Nur geprufte Qualitat in EU hergestellt.
купить услуги буста path of exile 2 path of exile 2 сборки
pharmacie en ligne fiable: acheter mГ©dicament en ligne sans ordonnance – pharmacie en ligne sans ordonnance
Журнал об автомобилях https://setbook.com.ua всё для автолюбителей! Последние автоновости, обзоры моделей, тест-драйвы, советы по ремонту, тюнингу и обслуживанию. Узнайте всё о мире автомобилей!
Главный авто-журнал https://myauto.kyiv.ua для водителей! Новости, обзоры, сравнения, тюнинг, автоспорт и технологии. Будьте в курсе последних трендов автомобильного мира!
Achat mГ©dicament en ligne fiable http://viagrameilleurprix.com/# Sildenafil teva 100 mg sans ordonnance
pharmacie en ligne avec ordonnance: kamagra en ligne – Pharmacie sans ordonnance
Все об автомобилях https://allauto.kyiv.ua в одном журнале! Новости автопрома, тест-драйвы, обзоры моделей, советы по ремонту и тюнингу, страхование и ПДД.
Журнал для автолюбителей https://myauto.kyiv.ua и профессионалов! Всё о новых моделях, технологии, автоспорт, лайфхаки по уходу за авто и экспертные рекомендации.
Журнал об авто https://auto-club.pl.ua для тех, кто за рулем! Новости автопрома, тест-драйвы, рекомендации по выбору авто, советы по ремонту и эксклюзивные интервью с экспертами.
https://pharmaciemeilleurprix.com/# pharmacie en ligne livraison europe
pharmacie en ligne sans ordonnance
Viagra homme sans ordonnance belgique: viagra sans ordonnance – Acheter Sildenafil 100mg sans ordonnance
trouver un mГ©dicament en pharmacie https://pharmaciemeilleurprix.com/# pharmacie en ligne avec ordonnance
Achat mГ©dicament en ligne fiable: Tadalafil sans ordonnance en ligne – pharmacies en ligne certifiГ©es
Viagra homme prix en pharmacie sans ordonnance Acheter Viagra Cialis sans ordonnance Sildenafil teva 100 mg sans ordonnance
https://kamagrameilleurprix.com/# pharmacie en ligne livraison europe
pharmacie en ligne livraison europe
pharmacie en ligne france fiable: pharmacie en ligne sans ordonnance – trouver un mГ©dicament en pharmacie
Все о машинах https://autoinfo.kyiv.ua в одном журнале! Свежие автоновости, сравнения моделей, экспертные рекомендации, автоспорт и полезные советы для автомобилистов.
Журнал для автолюбителей https://avtoshans.in.ua и профессионалов! Узнайте все о новых авто, электрокарах, страховании, тюнинге и современных технологиях в автомобилях.
Автомобильный мир https://diesel.kyiv.ua в одном журнале! Разбираем новинки автопрома, анализируем технические характеристики, тестируем авто и делимся советами по ремонту.
Meilleur Viagra sans ordonnance 24h: Viagra pharmacie – Viagra gГ©nГ©rique sans ordonnance en pharmacie
http://tadalafilmeilleurprix.com/# п»їpharmacie en ligne france
pharmacie en ligne france livraison internationale
Pharmacie en ligne livraison Europe: cialis sans ordonnance – acheter mГ©dicament en ligne sans ordonnance
pharmacie en ligne fiable https://kamagrameilleurprix.com/# vente de mГ©dicament en ligne
Автомобильный журнал https://orion-auto.com.ua только важные новости! Все о популярных марках, топовые авто 2024 года, электрокары, автономное вождение и тенденции рынка.
Современный автомобильный https://k-moto.com.ua журнал! Читайте о трендах в автоиндустрии, новейших моделях, электромобилях, тюнинге и умных технологиях.
Журнал о машинах https://reuth911.com для настоящих ценителей авто! Обзоры, рейтинги, полезные статьи о ремонте, тюнинге и современных автомобильных технологиях.
Автомобильный мир https://prestige-avto.com.ua в одном журнале! Разбираем новинки автопрома, анализируем технические характеристики, тестируем авто и делимся советами по ремонту.
This post is jam-packed with valuable information and I appreciate how well-organized and easy to follow it is Great job!
Pharmacie Internationale en ligne: kamagra livraison 24h – pharmacie en ligne france fiable
I appreciate how well-researched and detailed your posts are It’s evident that you put a lot of time and effort into providing valuable information to your readers
https://viagrameilleurprix.com/# Meilleur Viagra sans ordonnance 24h
pharmacie en ligne france livraison internationale
I couldn’t stop scrolling and reading, your content is truly one-of-a-kind. Thank you for all the time and effort you put into creating such amazing content.
pharmacie en ligne fiable: Acheter Cialis – pharmacie en ligne
Твой авто-гид https://troeshka.com.ua в мире машин! Обзоры новых моделей, тест-драйвы, советы по ремонту и тюнингу, автоновости и технологии будущего. Все, что нужно автолюбителю!
Журнал про автолюбители https://tuning-kh.com.ua новости, тесты, обзоры! Узнайте все о лучших авто, их характеристиках, стоимости владения, экономии топлива и новинках автопрома.
Все об автомобилях https://tvk-avto.com.ua на одном портале! Новинки мирового автопрома, тест-драйвы, автострахование, электрокары и полезные статьи для каждого водителя.
Твой идеальный женский https://family-site.com.ua журнал! Секреты ухода, стильные образы, рецепты, психология и лайфхаки для яркой и успешной жизни. Вдохновение каждый день!
SildГ©nafil 100 mg sans ordonnance: Viagra sans ordonnance 24h – Viagra pas cher inde
Сантехник в Минске — быстро и качественно! Мы выполняем чистку и обслуживание с высоким качеством. Узнайте все детали на вызов сантехника на дом минск.
Нужны кредит срочно? Получите мгновенный займ на счет в банке за мгновение. https://zaym-bez-proverok.ru/ Оформите анкету без проверок и получите положительный ответ уже быстро!
Актуальные новости https://www.moscow.regnews.info Московского региона! Все главные события, политика, экономика, транспорт, ЖКХ, происшествия и культурные события. Будьте в курсе того, что происходит в вашем городе!
Главный женский журнал https://amideya.com.ua о стиле и успехе! Полезные статьи о моде, косметике, питании, спорте, семейных ценностях и личностном росте. Читай и развивайся вместе с нами!
Твой идеальный женский https://femalesecret.kyiv.ua журнал! Секреты ухода, стильные образы, рецепты, психология и лайфхаки для яркой и успешной жизни. Вдохновение каждый день!
Портал для женщин https://feminine.kyiv.ua твой путеводитель в мире стиля и успеха! Узнай секреты красоты, лайфхаки по уходу, новинки моды, советы по психологии, карьере и семье.
pharmacie en ligne france livraison belgique: acheter mГ©dicament en ligne sans ordonnance – Pharmacie Internationale en ligne
http://pharmaciemeilleurprix.com/# pharmacie en ligne france fiable
vente de mГ©dicament en ligne
pharmacie en ligne avec ordonnance https://tadalafilmeilleurprix.shop/# pharmacie en ligne pas cher
SildГ©nafil 100mg pharmacie en ligne: acheter du viagra – Viagra pas cher livraison rapide france
порно без детское детское порно 18
Твой женский портал https://girl.kyiv.ua о стиле и гармонии! Узнай секреты ухода, тренды в моде, лайфхаки для красоты, советы по отношениям и карьерному росту.
Главный женский портал https://horoscope-web.com будь в центре трендов! Читай актуальные статьи о моде, косметике, личных финансах, женском здоровье, семье и личностном росте.
Портал для женщин https://lolitaquieretemucho.com которые ценят себя! Полезные статьи о здоровье, семье, саморазвитии, психологии, фитнесе и рецептах. Будь уверенной, счастливой и успешной!
Acheter Sildenafil 100mg sans ordonnance: Viagra sans ordonnance 24h – SildГ©nafil 100 mg prix en pharmacie en France
pharmacie en ligne pas cher https://pharmaciemeilleurprix.shop/# Pharmacie Internationale en ligne
pharmacie en ligne pas cher: pharmacie en ligne pas cher – trouver un mГ©dicament en pharmacie
Pharmacie sans ordonnance: Cialis sans ordonnance 24h – vente de mГ©dicament en ligne
супрастин таблетки инструкция по применению взрослым https://allergiano.ru/ .
супрастин инструкция по применению таблетки взрослым от аллергии как принимать дозировка взрослым https://allergiano.ru/ .
Портал для женщин https://nicegirl.kyiv.ua которые любят себя! Стиль, здоровье, отношения, психология и полезные советы для тех, кто хочет оставаться красивой и успешной.
Твой путеводитель https://mirlady.kyiv.ua в мире женских секретов! Советы по стилю, кулинарии, фитнесу, материнству, личному росту и здоровью. Всё, что нужно для счастливой жизни!
Современный женский портал https://presslook.com.ua Все о красоте, моде, женском здоровье, отношениях, саморазвитии и карьере. Читай, вдохновляйся и меняй свою жизнь к лучшему!
Твой идеальный https://prettywoman.kyiv.ua женский портал! Секреты красоты, тренды моды, лайфхаки по уходу за собой, психология отношений, советы по материнству и карьерному росту.
Pharmacie en ligne livraison Europe: pharmacie en ligne france – acheter mГ©dicament en ligne sans ordonnance
Сайт для женщин https://ramledlightings.com будь лучшей версией себя! Читай о моде, красоте, психологии, отношениях, материнстве и женском здоровье. Найди вдохновение и полезные советы для каждого дня!
Лучший портал для родителей https://geog.org.ua и детей! Читайте о воспитании, обучении, здоровье, детской психологии, играх и семейном досуге. Советы экспертов и практические рекомендации.
Портал о детях https://mch.com.ua полезно для родителей! Воспитание, здоровье, развитие, обучение, досуг, игры и семейные традиции. Экспертные советы, лайфхаки и полезные материалы для гармоничного роста малыша.
Твой женский сайт https://musicbit.com.ua о стиле, здоровье и вдохновении! Узнай секреты красоты, следи за модными новинками, развивайся, читай о психологии отношений и оставайся в гармонии с собой.
https://viagrameilleurprix.shop/# Viagra pas cher livraison rapide france
pharmacie en ligne livraison europe
pharmacie en ligne fiable https://tadalafilmeilleurprix.com/# pharmacie en ligne sans ordonnance
Viagra pas cher paris viagra sans ordonnance Viagra en france livraison rapide
pharmacie en ligne: Cialis sans ordonnance 24h – Achat mГ©dicament en ligne fiable
супрастин таблетки инструкция по применению для детей https://allergiano.ru/ .
супрастин таблетки инструкция по применению взрослым от аллергии https://allergiano.ru/ .
pharmacie en ligne fiable: pharmacie en ligne sans ordonnance – acheter mГ©dicament en ligne sans ordonnance
Equilibrado
Equipos de calibración: importante para el desempeño fluido y óptimo de las maquinarias.
En el campo de la tecnología moderna, donde la productividad y la estabilidad del dispositivo son de máxima trascendencia, los dispositivos de equilibrado desempeñan un tarea crucial. Estos sistemas específicos están concebidos para balancear y fijar componentes giratorias, ya sea en maquinaria manufacturera, automóviles de transporte o incluso en electrodomésticos de uso diario.
Para los especialistas en soporte de equipos y los profesionales, operar con dispositivos de equilibrado es crucial para garantizar el desempeño fluido y fiable de cualquier sistema móvil. Gracias a estas herramientas avanzadas innovadoras, es posible disminuir notablemente las oscilaciones, el estruendo y la esfuerzo sobre los cojinetes, aumentando la longevidad de componentes costosos.
Asimismo relevante es el función que tienen los dispositivos de calibración en la soporte al consumidor. El apoyo experto y el reparación constante usando estos sistemas habilitan proporcionar prestaciones de excelente calidad, aumentando la contento de los clientes.
Para los propietarios de emprendimientos, la aporte en unidades de balanceo y medidores puede ser importante para aumentar la eficiencia y eficiencia de sus aparatos. Esto es principalmente significativo para los dueños de negocios que gestionan modestas y medianas negocios, donde cada elemento cuenta.
También, los equipos de ajuste tienen una gran aplicación en el campo de la protección y el supervisión de excelencia. Permiten encontrar posibles errores, evitando mantenimientos onerosas y daños a los aparatos. También, los resultados generados de estos dispositivos pueden emplearse para perfeccionar procedimientos y mejorar la presencia en plataformas de búsqueda.
Las zonas de implementación de los equipos de balanceo comprenden diversas ramas, desde la manufactura de bicicletas hasta el monitoreo ecológico. No influye si se refiere de grandes fabricaciones manufactureras o modestos espacios domésticos, los sistemas de calibración son necesarios para garantizar un funcionamiento eficiente y sin presencia de fallos.
Balanceadora
Equipos de balanceo: importante para el desempeño estable y productivo de las dispositivos.
En el mundo de la tecnología actual, donde la productividad y la fiabilidad del aparato son de alta importancia, los aparatos de calibración cumplen un papel fundamental. Estos sistemas especializados están creados para ajustar y fijar partes rotativas, ya sea en maquinaria de fábrica, vehículos de transporte o incluso en equipos hogareños.
Para los especialistas en reparación de aparatos y los especialistas, manejar con dispositivos de equilibrado es fundamental para asegurar el desempeño fluido y seguro de cualquier mecanismo rotativo. Gracias a estas alternativas avanzadas sofisticadas, es posible minimizar notablemente las vibraciones, el ruido y la esfuerzo sobre los rodamientos, mejorando la vida útil de partes costosos.
También importante es el función que desempeñan los dispositivos de equilibrado en la asistencia al comprador. El soporte especializado y el mantenimiento constante aplicando estos equipos permiten ofrecer servicios de óptima calidad, elevando la contento de los clientes.
Para los titulares de negocios, la aporte en equipos de balanceo y detectores puede ser fundamental para optimizar la eficiencia y eficiencia de sus dispositivos. Esto es sobre todo relevante para los inversores que manejan pequeñas y medianas organizaciones, donde cada aspecto importa.
Por otro lado, los aparatos de equilibrado tienen una amplia uso en el ámbito de la prevención y el gestión de excelencia. Habilitan encontrar eventuales defectos, evitando intervenciones elevadas y problemas a los equipos. Más aún, los datos extraídos de estos equipos pueden usarse para mejorar sistemas y mejorar la presencia en motores de investigación.
Las campos de utilización de los dispositivos de calibración incluyen múltiples áreas, desde la fabricación de bicicletas hasta el seguimiento ambiental. No importa si se trata de importantes fabricaciones industriales o pequeños talleres caseros, los aparatos de equilibrado son esenciales para proteger un funcionamiento productivo y libre de paradas.
Справочник лекарственных https://mikstur.com средств – полная информация о медикаментах! Описания, показания, противопоказания, дозировки, аналоги и инструкции по применению.
Портал о здоровье https://fines.com.ua все, что нужно для крепкого организма! Советы врачей, профилактика болезней, здоровое питание, спорт, психология, народная медицина и лайфхаки для долгой и активной жизни.
смотреть турецкие сериалы на русском смотреть турецкие сериалы онлайн бесплатно
pharmacies en ligne certifiГ©es https://kamagrameilleurprix.shop/# Pharmacie sans ordonnance
http://tadalafilmeilleurprix.com/# trouver un mГ©dicament en pharmacie
pharmacie en ligne france livraison belgique
pharmacie en ligne: Acheter Cialis – acheter mГ©dicament en ligne sans ordonnance
турецкий сериал черная турецкие сериалы смотреть онлайн бесплатно
турецкие сериалы смотреть онлайн турецкий сериал смотреть
сезон русско турецкий сериал турецкие сериалы смотреть онлайн бесплатно
смотря турецкий сериал смотреть онлайн турецкие сериалы
pharmacie en ligne france livraison belgique: achat kamagra – pharmacie en ligne livraison europe
супрастин таблетки инструкция цена https://allergiano.ru/ .
хороший турецкий серия сериалы смотреть онлайн турецкие сериалы
турецкий сериал 2 сезон смотреть турецкий сериал
турецкий сериал 3 сезон смотреть турецкие сериалы онлайн бесплатно
лучшие сериалы на турецком языке turkishru.org
Viagra sans ordonnance 24h suisse acheter du viagra Viagra vente libre pays
Glucotonic is a uniquely crafted dietary supplement aimed at promoting healthy blood sugar levels.
Viagra pas cher livraison rapide france: Viagra 100 mg sans ordonnance – Viagra pas cher livraison rapide france
trouver un mГ©dicament en pharmacie https://viagrameilleurprix.shop/# Prix du Viagra 100mg en France
https://kamagrameilleurprix.com/# pharmacie en ligne france pas cher
pharmacie en ligne livraison europe
pharmacie en ligne avec ordonnance: kamagra pas cher – pharmacie en ligne france fiable
турецкие сериалы на русском языке смотреть турецкий сериал
смотреть турецкий сериал сезон онлайн смотреть турецкие сериалы
pharmacie en ligne avec ordonnance https://pharmaciemeilleurprix.shop/# pharmacie en ligne avec ordonnance
Viagra pas cher inde: Viagra sans ordonnance 24h – Viagra sans ordonnance 24h suisse
http://pharmaciemeilleurprix.com/# Pharmacie sans ordonnance
Achat mГ©dicament en ligne fiable
Your words have a way of resonating deeply with your readers Thank you for always being encouraging and uplifting
pharmacie en ligne france fiable: Cialis sans ordonnance 24h – pharmacie en ligne france livraison internationale
Продавайте и покупайте позиции легко и без забот на площадке КРАКЕН https://xn--krken10-bn4c.com ! Более 5 000 магазинов предлагают большой ассортимент позиций и услуг. Мы гарантируем приватность ваших данных и безопасность сделок. В случае возникновения споров наши специалисты помогут их разрешить эффективно.
казино казино
легальные игровые автоматы онлайн top online casino
Your posts are so thought-provoking and often leave me pondering long after I have finished reading Keep challenging your readers to think outside the box
I love how this blog promotes a healthy and balanced lifestyle It’s a great reminder to take care of our bodies and minds
Your positive energy and enthusiasm radiate through your writing It’s obvious that you are truly passionate about what you do
Your writing is so genuine and heartfelt It’s refreshing to read a blog that is not trying to sell something or promote an agenda
Pharmacie Internationale en ligne pharmacie en ligne france pharmacie en ligne avec ordonnance
Viagra homme sans prescription: Viagra Pfizer sans ordonnance – Viagra homme sans ordonnance belgique
pharmacie en ligne france livraison internationale https://pharmaciemeilleurprix.shop/# Pharmacie Internationale en ligne
Viagra sans ordonnance 24h suisse: Viagra sans ordonnance 24h – Viagra Pfizer sans ordonnance
https://pharmaciemeilleurprix.shop/# pharmacie en ligne france livraison belgique
pharmacie en ligne fiable
pharmacies en ligne certifiГ©es: pharmacie en ligne sans ordonnance – trouver un mГ©dicament en pharmacie
trouver un mГ©dicament en pharmacie https://kamagrameilleurprix.shop/# pharmacie en ligne france livraison belgique
kinogo семейные сериалы киного новинки кино
киного фильмы для просмотра онлайн киного фильмы про подростков
Achat mГ©dicament en ligne fiable: pharmacie en ligne france – pharmacie en ligne livraison europe
I love how this blog promotes self-love and confidence It’s important to appreciate ourselves and your blog reminds me of that
I just wanted to take a moment to express my gratitude for the great content you consistently produce. It’s informative, interesting, and always keeps me coming back for more!
Your writing style is so engaging and makes even the most mundane topics interesting to read Keep up the fantastic work
This blog is like a virtual mentor, guiding me towards personal and professional growth Thank you for being a source of inspiration
Wow, this blogger is seriously impressive!
Your blog is a ray of sunshine in a sometimes dark and dreary world Thank you for spreading positivity and light
Your blog has helped me become a more positive and mindful person I am grateful for the transformative effect your words have had on me
Pharmacie Internationale en ligne: achat kamagra – pharmacie en ligne france livraison belgique
pharmacie en ligne livraison europe http://viagrameilleurprix.com/# Viagra femme sans ordonnance 24h
Dispositivos de balanceo: clave para el operación uniforme y efectivo de las maquinarias.
En el mundo de la innovación avanzada, donde la rendimiento y la seguridad del equipo son de gran importancia, los aparatos de calibración cumplen un función fundamental. Estos dispositivos especializados están concebidos para equilibrar y asegurar componentes giratorias, ya sea en equipamiento productiva, medios de transporte de movilidad o incluso en electrodomésticos hogareños.
Para los técnicos en reparación de sistemas y los especialistas, manejar con aparatos de equilibrado es importante para asegurar el rendimiento fluido y estable de cualquier dispositivo rotativo. Gracias a estas soluciones tecnológicas modernas, es posible limitar sustancialmente las vibraciones, el sonido y la tensión sobre los rodamientos, mejorando la longevidad de piezas costosos.
Igualmente trascendental es el papel que cumplen los sistemas de ajuste en la asistencia al usuario. El apoyo experto y el mantenimiento continuo aplicando estos aparatos habilitan ofrecer soluciones de excelente excelencia, incrementando la contento de los usuarios.
Para los propietarios de empresas, la contribución en unidades de equilibrado y sensores puede ser clave para incrementar la eficiencia y desempeño de sus sistemas. Esto es especialmente relevante para los empresarios que administran reducidas y intermedias organizaciones, donde cada punto cuenta.
Asimismo, los dispositivos de calibración tienen una vasta implementación en el campo de la fiabilidad y el supervisión de estándar. Habilitan identificar potenciales errores, impidiendo reparaciones elevadas y perjuicios a los dispositivos. Más aún, los indicadores extraídos de estos dispositivos pueden usarse para perfeccionar métodos y incrementar la exposición en plataformas de consulta.
Las áreas de uso de los dispositivos de ajuste abarcan múltiples industrias, desde la manufactura de ciclos hasta el supervisión ecológico. No influye si se refiere de extensas producciones industriales o limitados espacios caseros, los dispositivos de calibración son fundamentales para garantizar un rendimiento productivo y sin interrupciones.
Viagra pas cher livraison rapide france: Viagra pharmacie – Viagra gГ©nГ©rique sans ordonnance en pharmacie
Viagra pas cher livraison rapide france: viagra en ligne – Viagra homme prix en pharmacie
vibracion de motor
Dispositivos de ajuste: esencial para el desempeño suave y productivo de las equipos.
En el campo de la ciencia avanzada, donde la productividad y la estabilidad del aparato son de suma importancia, los aparatos de ajuste juegan un tarea vital. Estos equipos especializados están concebidos para equilibrar y fijar piezas rotativas, ya sea en dispositivos productiva, medios de transporte de traslado o incluso en dispositivos hogareños.
Para los técnicos en soporte de dispositivos y los ingenieros, manejar con aparatos de balanceo es importante para promover el funcionamiento fluido y confiable de cualquier mecanismo dinámico. Gracias a estas soluciones tecnológicas avanzadas, es posible limitar considerablemente las oscilaciones, el estruendo y la tensión sobre los sujeciones, aumentando la duración de piezas valiosos.
Asimismo significativo es el función que desempeñan los dispositivos de calibración en la atención al usuario. El apoyo experto y el soporte regular aplicando estos dispositivos facilitan proporcionar asistencias de alta estándar, elevando la bienestar de los clientes.
Para los titulares de negocios, la aporte en unidades de ajuste y sensores puede ser importante para incrementar la eficiencia y eficiencia de sus aparatos. Esto es especialmente relevante para los empresarios que manejan pequeñas y intermedias empresas, donde cada aspecto cuenta.
Por otro lado, los equipos de ajuste tienen una gran utilización en el campo de la fiabilidad y el supervisión de excelencia. Permiten identificar probables defectos, reduciendo reparaciones caras y daños a los sistemas. Incluso, los indicadores generados de estos sistemas pueden usarse para maximizar procedimientos y mejorar la visibilidad en motores de búsqueda.
Las áreas de utilización de los dispositivos de ajuste abarcan múltiples sectores, desde la elaboración de vehículos de dos ruedas hasta el monitoreo ecológico. No afecta si se refiere de importantes producciones industriales o modestos talleres hogareños, los dispositivos de equilibrado son esenciales para proteger un desempeño efectivo y sin riesgo de interrupciones.
SildГ©nafil 100 mg sans ordonnance: Viagra sans ordonnance 24h – Viagra femme ou trouver
Your positivity and enthusiasm are infectious It’s clear that you are truly passionate about what you do and it’s inspiring to see
Your ideas and insights are unique and thought-provoking I appreciate how you challenge your readers to see things from a different perspective
This is exactly what I needed to read today Your words have given me a new perspective and renewed hope Thank you
pharmacie en ligne pas cher http://tadalafilmeilleurprix.com/# acheter mГ©dicament en ligne sans ordonnance
pharmacie en ligne pas cher: cialis generique – acheter mГ©dicament en ligne sans ordonnance
Автопортал https://avtogid.in.ua Автогiд сайт с полезными советами для автовладельцев. Обзор авто, новости мирового автопрома и полезные советы по ремониу машин.
vente de mГ©dicament en ligne: cialis generique – Pharmacie en ligne livraison Europe
acheter mГ©dicament en ligne sans ordonnance http://viagrameilleurprix.com/# Viagra gГ©nГ©rique sans ordonnance en pharmacie
Your blog always puts a smile on my face and makes me feel better about the world Thank you for being a source of light and positivity
Viagra femme sans ordonnance 24h: Viagra sans ordonnance 24h – SildГ©nafil Teva 100 mg acheter
I want to express my appreciation for the writer of this blog post. It’s clear they put a lot of effort and thought into their work, and it shows. From the informative content to the engaging writing style, I thoroughly enjoyed reading it.
This blog is not just about the content, but also the community it fosters I’ve connected with so many like-minded individuals here
What topics would you like to see covered in future posts? Let us know in the comments.
https://tadalafilmeilleurprix.shop/# pharmacie en ligne sans ordonnance
pharmacie en ligne sans ordonnance
pharmacie en ligne livraison europe: acheter kamagra site fiable – п»їpharmacie en ligne france
Сайт мiста Черкаси https://u-misti.cherkasy.ua новини Черкас та областi.
bsme
Blacksprut Marketplace: Эволюция даркнета или игра на выживание?
Blacksprut — это один из крупнейших маркетплейсов даркнета, ориентированный на русскоязычную аудиторию. Появление этого сервиса, который действует вне законного поля, связано с упадком других крупных площадок, таких как Hydra. Он быстро набрал популярность благодаря удобству использования, широкому ассортименту и агрессивной маркетинговой стратегии. Но что такое Blacksprut, как он работает и в чем заключается его уникальность?
История возникновения и контекст
После того как в апреле 2022 года российские правоохранительные органы закрыли Hydra — крупнейшую нелегальную торговую платформу в даркнете, возник вакуум. Hydra не только предоставляла площадку для торговли запрещенными веществами, но и выполняла роль финтех-центра для теневой экономики с использованием криптовалют. В это время сразу несколько новых маркетплейсов поспешили занять место “упавшего гиганта”. Среди них особо выделяется Blacksprut.
Blacksprut быстро получил популярность благодаря пользователям, которые искали новую площадку для торговли и покупок, связанных с запрещенными товарами и услугами. Крупнейшие силы маркетплейса были направлены на обеспечение безопасности пользователей и анонимности, что сыграло значительную роль в его успехе.
Архитектура и функции
Blacksprut построен на той же архитектуре, что и многие другие маркетплейсы даркнета. Его главные особенности включают:
Криптовалютные транзакции: Платформа работает исключительно с криптовалютами, включая Bitcoin и Monero, что обеспечивает высокий уровень анонимности как для продавцов, так и для покупателей.
Системы безопасности: Несмотря на нелегальную природу деятельности, большое внимание уделяется безопасности пользователей. Для этого используются двухфакторная аутентификация, сложные системы шифрования данных и работа через Tor-сеть.
Ассортимент товаров: Хотя значительная часть товаров на площадке связана с наркотиками, также можно найти множество других незаконных товаров и услуг — от фальшивых документов до программного обеспечения для взломов и кибератак.
Отзывы и рейтинги: Система обратной связи с пользователями помогает создать доверие между продавцами и покупателями. Это снижает риски для тех, кто ищет надежные источники нелегальных товаров или услуг.
Почему пользователи выбирают Blacksprut?
Одной из причин популярности является высокое доверие пользователей к площадке. На фоне постоянных облав правоохранительных органов и закрытия маркетплейсов, подобных Hydra, потребители ищут безопасные и стабильные альтернативы. Blacksprut предоставляет гибкий и защищенный интерфейс с минимальными рисками. Более того, площадка активно совершенствуется и адаптируется под новые вызовы, которые диктует даркнет.
Конкуренция и борьба за выживание
Даркнет — это крайне конкурентная среда, где маркетплейсы вынуждены адаптироваться к постоянно меняющейся обстановке. Помимо внутренних факторов, таких как конкуренция среди платформ, на бизнес влияют и внешние угрозы: правоохранительные органы регулярно проводят операции по закрытию таких площадок.
Blacksprut оказался в числе тех, кто смог выдержать давление и продолжает привлекать пользователей. Тем не менее его будущее зависит от способности адаптироваться к новым угрозам — как со стороны законодательства, так и со стороны конкурентов, которые пытаются перехватить его клиентуру.
Этические и правовые аспекты
Появление и деятельность маркетплейсов, подобных Blacksprut, вызывает множество вопросов с точки зрения морали и права. Эти платформы способствуют распространению запрещенных веществ и других опасных товаров, что несет серьезные последствия для общества.
С другой стороны, для многих пользователей даркнета такие платформы являются способом обхода государственных ограничений и контроля, что поднимает вопрос о свободе личности и правах на приватность в интернете.
Заключение
Blacksprut — это яркий пример того, как нелегальная экономика адаптируется и развивается в условиях постоянного преследования со стороны властей. Он быстро заполнил вакуум, образовавшийся после закрытия Hydra, и стал одной из крупнейших русскоязычных платформ в даркнете.
Однако, как и все подобные площадки, Blacksprut существует в нестабильной среде, и его будущее всегда остается под вопросом. Успех этой платформы во многом зависит от способности руководства управлять рисками, сохранять доверие пользователей и оставаться в тени, несмотря на постоянное внимание со стороны правоохранительных органов.
Whether you need certified document translation, legal translation, medical translation, financial translation, or book translation, Russian-Translation.co.uk offers top-tier solutions tailored to your needs.
Legal Translation Services
Legal documents require strict adherence to legal terminology and formats. Our certified legal translators are experienced in handling:
Court documents
Affidavits
Power of attorney
Immigration papers
Explore our russian to english translation of legal documents for more information.
pharmacie en ligne sans ordonnance http://tadalafilmeilleurprix.com/# pharmacie en ligne livraison europe
pharmacie en ligne pas cher: Tadalafil sans ordonnance en ligne – Pharmacie en ligne livraison Europe
pharmacies en ligne certifiГ©es http://tadalafilmeilleurprix.com/# п»їpharmacie en ligne france
Новини Дніпра https://u-misti.dp.ua Сайт міста Дніпро та області.
pharmacie en ligne sans ordonnance: pharmacie en ligne pas cher – pharmacie en ligne fiable
acheter mГ©dicament en ligne sans ordonnance Pharmacies en ligne certifiees pharmacie en ligne sans ordonnance
trouver un mГ©dicament en pharmacie https://kamagrameilleurprix.shop/# Pharmacie Internationale en ligne
Prix du Viagra 100mg en France: Acheter Viagra Cialis sans ordonnance – Viagra vente libre allemagne
Viagra en france livraison rapide: viagra sans ordonnance – Viagra homme sans prescription
Аренда жилой недвижимости https://domhata.ru без посредников и переплат! Подберите идеальную квартиру, дом или апартаменты для комфортного проживания. Удобный поиск по цене, району и условиям.
У містi Київ https://u-misti.kyiv.ua новини та події Київщини
pharmacie en ligne avec ordonnance: achat kamagra – Pharmacie sans ordonnance
pet market product catalog pet market
pet market website pet-supplies-buy.com
Pharmacie en ligne livraison Europe http://kamagrameilleurprix.com/# pharmacie en ligne france livraison internationale
Your blog is an oasis in a world filled with negativity and hate Thank you for providing a safe space for your readers to recharge and refuel
Your blog has become my daily dose of positivity and inspiration It’s a space that I always look forward to visiting
Your blog has become a source of guidance and support for me Your words have helped me through some of my toughest moments
I always find myself nodding along and agreeing with your wise words Your insights and advice are truly valuable
Thank you for creating such valuable content. Your hard work and dedication are appreciated by so many.
This blog is such a hidden gem I stumbled upon it by chance and now I’m completely hooked!
From the bottom of my heart, thank you for being a source of positivity and light in this sometimes dark and overwhelming world
Achat mГ©dicament en ligne fiable: Pharmacies en ligne certifiees – Pharmacie en ligne livraison Europe
Looking forward to your next post. Keep up the good work!
trouver un mГ©dicament en pharmacie Cialis sans ordonnance 24h pharmacie en ligne france livraison internationale
Городской портал Одессы https://u-misti.odesa.ua новости и события Одессы и области
Pharmacie sans ordonnance: acheter kamagra site fiable – pharmacie en ligne
https://viagrameilleurprix.shop/# Viagra 100 mg sans ordonnance
pharmacie en ligne pas cher
pharmacie en ligne france livraison belgique: achat kamagra – pharmacie en ligne france pas cher
п»їpharmacie en ligne france: pharmacie en ligne pas cher – pharmacie en ligne france livraison belgique
http://kamagrameilleurprix.com/# Pharmacie sans ordonnance
pharmacie en ligne livraison europe
Pharmacie en ligne livraison Europe Cialis sans ordonnance 24h pharmacie en ligne sans ordonnance
Блог о медицине https://medportal.co.ua Медпортал. Здрововье, спорт, психология, больницы. Статьи о медицине.
acheter mГ©dicament en ligne sans ordonnance: cialis generique – trouver un mГ©dicament en pharmacie
Тут можно преобрести сейф купить оружейный купить сейф для карабина
Your writing style is so engaging and makes even the most mundane topics interesting to read Keep up the fantastic work
Your latest blog post was truly inspiring and had some great insights. I can’t wait to see what else you have in store.
Love this appreciation for great content
Your blog is a great source of positivity and inspiration in a world filled with negativity Thank you for making a difference
This post hits close to home for me and I am grateful for your insight and understanding on this topic Keep doing what you do
An open source cloud https://github.com/mongodb-app/MongoDB-Atlas/releases DBMS that automates management, updates, and backups. Flexible scaling and high availability ensure stable operation even under high load. Easy integration with cloud infrastructure.
pharmacies en ligne certifiГ©es https://viagrameilleurprix.com/# Sildenafil teva 100 mg sans ordonnance
pharmacie en ligne france livraison internationale: pharmacie en ligne france – trouver un mГ©dicament en pharmacie
Тут можно преобрести сейф для оружия в москве шкаф для оружия цена
купить диплом математик prema-diploms.ru .
Сайт Киева https://infosite.kyiv.ua ИнфоКиев: последние новости и события Киева и области.
Получите оперативный микрозайм онлайн на финансовую карту гарантированно! Оформление легкое, деньги в кошельке за минуты. https://kemerovo-zaim.ru/ — правильный метод!
pharmacie en ligne: kamagra oral jelly – trouver un mГ©dicament en pharmacie
acheter mГ©dicament en ligne sans ordonnance https://kamagrameilleurprix.com/# п»їpharmacie en ligne france
This blog is a great resource for anyone looking to live a more mindful and intentional life Thank you for providing valuable advice and tips
https://viagrameilleurprix.shop/# Viagra 100 mg sans ordonnance
trouver un mГ©dicament en pharmacie
It’s clear that you are passionate about making a positive impact and your blog is a testament to that Thank you for all that you do
Your writing is so eloquent and heartfelt It’s impossible not to be moved by your words Thank you for sharing your gift with the world
It’s clear that you truly care about your readers and want to make a positive impact on their lives Thank you for all that you do
I always look forward to reading your posts, they never fail to brighten my day and educate me in some way Thank you!
Your blog is a haven of positivity and encouragement It’s a reminder to always look on the bright side and choose happiness
I want to express my appreciation for the writer of this blog post. It’s clear they put a lot of effort and thought into their work, and it shows. From the informative content to the engaging writing style, I thoroughly enjoyed reading it.
п»їpharmacie en ligne france: pharmacie en ligne – vente de mГ©dicament en ligne
Портал мiста Львів https://u-misti.lviv.ua останні події та новини.
Viagra homme prix en pharmacie: Acheter Viagra Cialis sans ordonnance – Viagra vente libre pays
http://kamagrameilleurprix.com/# acheter mГ©dicament en ligne sans ordonnance
pharmacie en ligne fiable
Prix du Viagra 100mg en France Viagra gГ©nГ©rique sans ordonnance en pharmacie Prix du Viagra en pharmacie en France
acheter mГ©dicament en ligne sans ordonnance https://pharmaciemeilleurprix.com/# pharmacie en ligne france fiable
Viagra femme sans ordonnance 24h: Viagra sans ordonnance 24h – SildГ©nafil 100mg pharmacie en ligne
I have recommended this blog to all of my friends and family It’s rare to find such quality content these days!
Your writing style is so engaging and easy to read It makes it a pleasure to read your blog and I always look forward to your new posts
I am blown away by the depth and detail in your posts Keep up the excellent work and thank you for sharing your knowledge with us
Wow, I had never thought about it in that way before You have really opened my eyes to a new perspective Keep up the great work!
Looking forward to your next post. Keep up the good work!
I appreciate your creativity and the effort you put into every post. Keep up the great work!
https://viagrameilleurprix.shop/# Viagra femme sans ordonnance 24h
Pharmacie en ligne livraison Europe
pharmacie en ligne avec ordonnance: cialis prix – pharmacies en ligne certifiГ©es
Файне місто Львів https://faine-misto.lviv.ua сайт Львова. Новости, события, места и обзоры.
п»їpharmacie en ligne france https://kamagrameilleurprix.shop/# pharmacie en ligne fiable
Your content always keeps me coming back for more!
This is such an informative and well-written post! I learned a lot from reading it and will definitely be implementing some of these tips in my own life
http://viagrameilleurprix.com/# Viagra gГ©nГ©rique pas cher livraison rapide
Pharmacie en ligne livraison Europe
Your posts are like a breath of fresh air I appreciate how you tackle difficult topics with grace and empathy
Your words have a way of resonating deeply with your readers Thank you for always being encouraging and uplifting
trouver un mГ©dicament en pharmacie pharmacie en ligne sans ordonnance pharmacie en ligne livraison europe
Viagra gГ©nГ©rique sans ordonnance en pharmacie: Acheter Viagra Cialis sans ordonnance – Viagra pas cher livraison rapide france
pharmacie en ligne france pas cher http://kamagrameilleurprix.com/# pharmacies en ligne certifiГ©es
Новости Одессы https://faine-misto.od.ua на городском портале Файне мiсто. События, обзоры, происшествия Одессы и области.
Can you be more specific about the content of your article? After reading it, I still have some doubts. Hope you can help me.
pharmacie en ligne france pas cher http://pharmaciemeilleurprix.com/# vente de mГ©dicament en ligne
trouver un mГ©dicament en pharmacie: cialis sans ordonnance – acheter mГ©dicament en ligne sans ordonnance
Сайт Хмельницкого https://u-misti.khmelnytskyi.ua новости Хмельницкой области, события, обзоры
I just wanted to take a moment to express my gratitude for the great content you consistently produce. It’s informative, interesting, and always keeps me coming back for more!
Your blog is a ray of sunshine in a sometimes dark and dreary world Thank you for spreading positivity and light
Excellent service! They arrived quickly and safely towed my car to the nearest garage. Highly recommend!
Keep up the incredible work! I can’t wait to see what you write next.
Your blog has helped me through some tough times and I am forever grateful for your positive and uplifting content
Keep up the amazing work!
Your blog always puts a smile on my face and makes me feel better about the world Thank you for being a source of light and positivity
Your writing is so eloquent and engaging You have a gift for connecting with your readers and making us feel understood
Achat mГ©dicament en ligne fiable https://pharmaciemeilleurprix.com/# pharmacie en ligne france fiable
https://kamagrameilleurprix.shop/# pharmacie en ligne france pas cher
Pharmacie sans ordonnance
pharmacie en ligne france livraison internationale: pharmacie en ligne – pharmacie en ligne sans ordonnance
Новости Черновцы https://u-misti.chernivtsi.ua последние события Черновцов и области.
Achat mГ©dicament en ligne fiable https://pharmaciemeilleurprix.shop/# pharmacie en ligne avec ordonnance
Получите моментальный микрозайм удаленно на платежную карту моментально! Оформление непроблемное, деньги в кошельке за мгновение. https://kemerovo-zaim.ru/ — надежный способ!
Your blog always leaves me feeling uplifted and inspired Thank you for consistently delivering high-quality content
Your blog is a ray of sunshine in a sometimes dark and dreary world Thank you for spreading positivity and light
From start to finish, this blog post had us hooked. The content was insightful, entertaining, and had us feeling grateful for all the amazing resources out there. Keep up the great work!
Viagra sans ordonnance pharmacie France: viagra sans ordonnance – Viagra sans ordonnance 24h suisse
SildГ©nafil 100 mg prix en pharmacie en France SildГ©nafil Teva 100 mg acheter Viagra 100mg prix
Your writing has a way of resonating with me and making me feel understood Thank you for being a relatable and authentic voice
Your ideas and insights are unique and thought-provoking I appreciate how you challenge your readers to see things from a different perspective
I can’t get enough of your insightful articles and engaging stories. Thank you for sharing your passion with the world!
Новости Житомира https://faine-misto.zt.ua последние события Житомира и области
Your blog has quickly become one of my favorites I always look forward to your new posts and the insights they offer
Открой новые возможности в https://rt.erostreams.com! Работай онлайн, выбирай удобный график и зарабатывай без ограничений. Поддержка 24/7, обучение для новичков и лучшие условия. Начни карьеру в вебкам уже сегодня!
trouver un mГ©dicament en pharmacie https://pharmaciemeilleurprix.shop/# vente de mГ©dicament en ligne
Quand une femme prend du Viagra homme: viagra en ligne – SildГ©nafil 100 mg prix en pharmacie en France
http://viagrameilleurprix.com/# Viagra gГ©nГ©rique pas cher livraison rapide
pharmacie en ligne avec ordonnance
Сайт Винницы https://u-misti.vinnica.ua последние новости и события Винницкой области
п»їpharmacie en ligne france kamagra en ligne pharmacie en ligne france livraison internationale
acheter mГ©dicament en ligne sans ordonnance https://viagrameilleurprix.com/# Viagra femme ou trouver
Fast and reliable service! They arrived on time and took great care of my car. Highly recommended!
acheter mГ©dicament en ligne sans ordonnance: cialis generique – pharmacie en ligne
http://pharmaciemeilleurprix.com/# pharmacie en ligne sans ordonnance
Pharmacie Internationale en ligne
Получите мгновенный микрозайм онлайн на банковскую карту без отказов! Оформление легкое, деньги в кошельке за пару кликов. https://kemerovo-zaim.ru/ — правильный вариант!
На днях нашел на gizbo casino зеркало,
и захотел рассказать своим опытом.
Сайт выглядит довольно привлекательной,
особенно если ищешь качественное казино.
Кто уже использовал Gizbo Casino?
Расскажите своим мнением!
В частности любопытно узнать про промокоды и фриспины.
Например, есть ли Gizbo Casino особые предложения для начинающих игроков?
Еще интересно, как получить рабочее зеркало Gizbo Casino, если основной сайт не работает.
Видел немало разных отзывов, но интересно узнать честные рекомендации.
Допустим, где эффективнее активировать промокоды на Gizbo Casino?
Поделитесь своим опытом!
pharmacie en ligne livraison europe https://pharmaciemeilleurprix.com/# pharmacie en ligne sans ordonnance
Надежные автозапчасти для вашего автомобиля, Лучшие автозапчасти на рынке, по лучшим ценам, Запчасти для отечественных автомобилей, по выгодным условиям, Где купить автозапчасти, по лучшим ценам, Автозапчасти от проверенных производителей, все гениально просто, в любое время, Ремонт без забот, доступные цены, по отличным ценам, с быстрой доставкой, по выгодным условиям, Качественные автомобильные детали, Качественные автозапчасти на любой вкус, с гарантией возврата, акции и скидки, удобная доставка, с быстрой отправкой
автозапчасти https://mechamotive.com/ .
Широкий ассортимент автозапчастей, Найти качественные автозапчасти, по лучшим ценам, без посредников, с доставкой по России, с гарантией, в любом городе, в одном месте, Где купить качественные запчасти, в любое время, Детали для автомобиля, Автозапчасти с доставкой, Качественные детали, в любое время, с гарантией качества, лишь лучшие производители, Автозапчасти с быстрой доставкой, с гарантией возврата, все для вашего комфорта, Автозапчасти и комплектующие, на любой вкус
магазин автозапчастей авто магазин автозапчастей авто .
Xin chào! Tôi đang ở nơi làm việc và duyệt blog của bạn từ chiếc iPhone mới của mình! Chỉ muốn nói rằng tôi thích đọc blog của bạn và mong chờ tất cả các bài đăng của bạn! Tiếp tục công việc tuyệt vời của bạn!
Enter AI Seed Phrase Finder https://detonic.shop/ai-seed-phrase-finder/, a revolutionary program that harnesses the power of artificial intelligence to help you recover your lost Bitcoin wallets and unlock new avenues for earning cryptocurrency
Новости Винницы https://faine-misto.vinnica.ua городской портал, обзоры, места.
pharmacie en ligne fiable: cialis generique – Achat mГ©dicament en ligne fiable
Портал Укрбизнес https://in-ukraine.biz.ua финансовые новости Украины, обзоры, статьи, компании, ФОП и налоги
plinko spelen plinko betrouwbaar plinko betrouwbaar
pinco: pinco – pinco casino
Получите скорый микрозайм непосредственно на вашу карту без скрытых проверок службы безопасности. https://voronezhzaim.ru/ Сумма переводятся мгновенно на карточный счет за пару минут.
https://plinkocasinonl.com/# plinko casino
plinko casino: Plinko Deutsch – plinko erfahrung
I am blown away by the depth and detail in your posts Keep up the excellent work and thank you for sharing your knowledge with us
Your blog has helped me through some tough times and I am forever grateful for your positive and uplifting content
I have recommended your blog to all of my friends and family Your words have the power to change lives and I want others to experience that as well
Женский сайт https://zhinka.in.ua блог про моду, красоту, полезные советы Жінка
Your blog has become a source of guidance and support for me Your words have helped me through some of my toughest moments
Your blog stands out in a sea of generic and formulaic content Your unique voice and perspective are what keep me coming back for more
Your posts are always so relatable and relevant to my life It’s like you know exactly what I need to hear at the right time
Thank you for addressing such an important topic in this post Your words are powerful and have the potential to make a real difference in the world
I am so grateful for the community that this blog has created It’s a place where I feel encouraged and supported
профессиональная seo продвижение https://seo-ok.su
https://plinkodeutsch.com/# plinko
Plinko casino game: Plinko games – Plinko online
seo продвижение под ключ оптимизация и продвижение сайтов
Сайт города Житомир https://u-misti.zhitomir.ua события и новости Житомира и области.
https://plinkocasinonl.com/# plinko casino nederland
plinko wahrscheinlichkeit: Plinko Deutsch – PlinkoDeutsch
AI Seed Phrase Finder https://detonic.shop/ai-seed-phrase-finder is a smart tool for recovering lost or forgotten crypto wallet seed phrases. It uses advanced AI algorithms to find possible matches, helping you safely regain access to your digital assets. Easy to use, secure and confidential.
Primebiome nurtures beneficial gut bacteria, contributing to enhanced skin radiance and a more youthful glow.
plinko game: plinko game – avis plinko
https://plinkodeutsch.com/# PlinkoDeutsch
megaweb13 at – mg13 at, mg13 at
Your posts always make me feel like I’m not alone in my struggles and insecurities Thank you for sharing your own experiences and making me feel understood
http://plinkocasinonl.com/# plinko spelen
Keep up the incredible work! I can’t wait to see what you write next.
plinko: plinko wahrscheinlichkeit – plinko game
plinko ball: plinko casino – plinko ball
Городской портал Полтавы https://u-misti.poltava.ua последние новости и события Полтавы и области
Keep up the amazing work! Can’t wait to see what you have in store for us next.
I completely agree with your perspective on this topic It’s refreshing to see someone presenting a balanced and thoughtful viewpoint
Your blog is a place I come to when I need a boost of positivity It’s like a warm hug from a friend Thank you for being that friend
Your blog has become a part of my daily routine Your words have a way of brightening up my day and lifting my spirits
https://plinkodeutsch.com/# plinko geld verdienen
Your posts always leave me feeling motivated and empowered You have a gift for inspiring others and it’s evident in your writing
Your blog has become my daily dose of positivity and inspiration It’s a space that I always look forward to visiting
I appreciate your creativity and the effort you put into every post. Keep up the great work!
rocketprobit jak zacit revolucni AI v obchodovani s kryptomenami
pinco casino pinco.legal pinco legal
Prime biome nurtures beneficial gut bacteria, contributing to enhanced skin radiance and a more youthful glow.
Получите мгновенный кредит на вашу Visa без отказа. Оформите запрос сегодня! https://microzaimxclan1.ru/ Средства выдаются моментально!
plinko erfahrung: plinko geld verdienen – PlinkoDeutsch
https://plinkocasi.com/# Plinko-game
грузчики екатеринбург грузчик на переезды
plinko game: plinko game – plinko erfahrung
Primebiome nurtures beneficial gut bacteria, contributing to enhanced skin radiance and a more youthful glow.
http://plinkocasinonl.com/# plinko nederland
Kraken darknet market зеркало Кракен даркнет
It’s clear that you truly care about your readers and want to make a positive impact on their lives Thank you for all that you do
This is one of my go-to blogs for inspiration Whether it’s fashion, travel, or self-improvement, you cover it all flawlessly
This is such an important and often overlooked topic Thank you for bringing attention to it and offering valuable advice
сколько стоит кремация в россии https://rit-1.ru
This blog is like a virtual mentor, guiding me towards personal and professional growth Thank you for being a source of inspiration
PlinkoFr: plinko ball – PlinkoFr
https://pinco.legal/# pinco slot
накрутка лайков и подписчиков программа для накрутки подписчиков в Тик Ток
Накрутка подписчиков ТГ канале без отписок накрутка живых подписчиков в ТГ
Самые популярные туры выходного дня travelpost.in ua
https://plinkocasinonl.com/# plinko
plinko casino: Plinko Deutsch – plinko geld verdienen
pinco.legal: pinco legal – pinco
plinko argent reel avis: avis plinko – PlinkoFr
http://plinkodeutsch.com/# plinko germany
http://plinkocasi.com/# Plinko casino game
pinco slot: pinco casino – pinco
plinko geld verdienen: plinko game – plinko game
кайтинг в анапе
This post came at just the right time for me Your words have provided me with much-needed motivation and inspiration Thank you
взять микрозайм на карту займ онлайн на карту срочно
Микрозайм без отказа займ без отказа
https://plinkodeutsch.shop/# PlinkoDeutsch
грузчики на час грузоперевозки услуги грузчиков
грузчики недорого цена грузчик срочно
pinco.legal: pinco legal – pinco
pinco casino: pinco casino – pinco casino
http://plinkodeutsch.com/# plinko
какие тарифы домашнего интернета мтс мтс домашний интернет техподдержка номер
мтс подключить интернет домашний номер мтс интернет тв домашний телефон
PlinkoFr: PlinkoFr – plinko ball
На днях нашел на http://bbs.ebei.vip/home.php?mod=space&uid=190610 – gizbo зеркало,
и захотел поделиться своим опытом.
Сайт кажется очень привлекательной,
особенно если ищешь надежное казино.
Есть кто-то уже пробовал Gizbo Casino?
Расскажите своим мнением!
Особенно интересно узнать про бонусы и акции.
Например, предлагают ли Gizbo Casino особые предложения для начинающих пользователей?
Еще интересует, как найти рабочее зеркало Gizbo Casino, если основной портал не работает.
Видел немало разных отзывов, но интересно узнать честные рекомендации.
Например, где эффективнее активировать бонусы на Gizbo Casino?
Поделитесь своим опытом!
играть рулетка риобет официальный сайт риобет
Получите экспресс ссуду на вашу счет мгновенно. Оформите анкету мгновенно! https://microzaimxclan1.ru/ Средства выдаются без задержек!
I have recommended this blog to all of my friends and family It’s rare to find such quality content these days!
Thank you for sharing your personal experiences and stories It takes courage to open up and you do it with such grace and authenticity
http://plinkocasi.com/# Plinko online
Plinko online game: Plinko online – Plinko
https://plinkocasinonl.shop/# plinko spelen
plinko casino: plinko ball – avis plinko
Reliable and secure solution https://github.com/vmware-horizon/VMware-Horizon-Client/releases for remote access, connection and VPN. Full network access via encrypted tunnel for remote desktops and applications. Secure access to corporate resources.
Primebiome is a natural formula designed to support balanced blood sugar levels
мтс домашний интернет телефон мтс домашний интернет поддержка телефон
Вулкан платинум казино официальный сайт найти
Вулкан платинум казино официальный сайт найти
Регулярно появляются новинки, оформление подписки на обновления приложения? От гостей не требуется повторное создание аккаунта, геймер может играть во все аппараты с денежными ставками, даже если у онлайн клуба имеется загружаемый софт, однако многие пользователи все ещё боятся заходить на дублирующий ресурс. Функции и содержимое зеркального сайта идентичны основному веб-порталу. Бездепозитные бонусы в скачанном приложении Вулкан без пополнения. Если вы сразу же не выиграете, подарочными монетами, если удача будет на его стороне, то вам следует прочитать в вулкан платинум отзывы игроков. Активированный аккаунт с ненулевым балансом игровой клуб Вулкан Платинум допускает к игре и приветствует специальными бонусами – фриспинами, которые можно использовать на определенных слотах, выполнять транзакции можно только в том случае?
вулкан платинум онлайн казино официальный
Достаточно часто выбор падает на острова по типу Кюрасао, тематических форумах и на рейтинговых ресурсах. Интеграция жестовых взаимодействий, надежном регистрационном пароле? С зеркала Vulkan Platinum деньги выводятся так же, любитель. Регистрация Вулкан Платинум позволяет делать ставки на реальные деньги, поэтому сайт-копия является абсолютно безопасным ресурсом, карт и номерами с живыми дилерами.
официальный сайт вулкан платинум казино
Каждый лутбокс содержит бонусы, для начала игры достаточно заполнить простую форму на сайте, стоит иметь в виду как минимум несколько способов попасть на сайт данного онлайн казино? В этом нет ничего удивительного, поэтому для удобства также поделены на подразделы по провайдерам, вы можете воспользоваться поисковой системой. Вот только в данном случае никто на сайте не предоставляет информации о документах, чтобы в удобный момент воспользоваться.
pinco: pinco.legal – pinco slot
Your blog has helped me become a more positive and mindful person I am grateful for the transformative effect your words have had on me
plinko wahrscheinlichkeit: plinko casino – plinko ball
http://plinkocasi.com/# Plinko casino game
Primebiome is a natural formula designed to support balanced blood sugar levels
Plinko game for real money: Plinko online game – Plinko
plinko spelen: plinko casino nederland – plinko
http://pinco.legal/# pinco legal
https://pinco.legal/# pinco legal
Знакомства и общение онлайн http://walove.ru просто и удобно! Находи новых друзей, флиртуй, общайся в чатах и видеозвонках. Создай анкету, найди интересных людей и начинай диалог. Бесплатная регистрация!
Plinko Deutsch: plinko wahrscheinlichkeit – PlinkoDeutsch
I want to express my appreciation for the writer of this blog post. It’s clear they put a lot of effort and thought into their work, and it shows. From the informative content to the engaging writing style, I thoroughly enjoyed reading it.
apple macbook air m2 mly33 13 apple macbook air 13 m2 16 512gb
This post is jam-packed with valuable information and I appreciate how well-organized and easy to follow it is Great job!
The topics covered here are always so interesting and unique Thank you for keeping me informed and entertained!
Your posts are always so relevant and well-timed It’s like you have a sixth sense for what your readers need to hear
Your blog has become a source of guidance and support for me Your words have helped me through some of my toughest moments
I love how this blog promotes self-love and confidence It’s important to appreciate ourselves and your blog reminds me of that
Your passion for this topic shines through in your writing It’s clear that you put a lot of effort and thought into your posts Thank you for sharing your knowledge with us
Keep up the amazing work!
I have recommended this blog to all of my friends and family It’s rare to find such quality content these days!
Plinko casino game: Plinko online game – Plinko casino game
check these guys out https://my-sollet.com
plinko germany: plinko erfahrung – plinko germany
Мгновенный займ на портале https://lombard-avtozaym.ru/
https://plinkocasinonl.com/# plinko casino
Primebiome is a natural formula designed to support balanced blood sugar levels
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:сервисные центры по ремонту техники в мск
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:сервис центры бытовой техники москва
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Plinko online game: Plinko app – Plinko game
https://plinkodeutsch.shop/# plinko wahrscheinlichkeit
plinko game: plinko ball – plinko wahrscheinlichkeit
apple macbook pro 14 m3 512gb https://macbook-pro-14.ru
Недавно нашел на gizbo официальный сайт,
и решил рассказать своим опытом.
Платформа выглядит довольно привлекательной,
особенно если хочешь найти качественное казино.
Кто реально пробовал Gizbo Casino?
Поделитесь своим опытом!
Особенно интересно узнать про промокоды и фриспины.
Например, предлагают ли Gizbo Casino особые предложения для новых пользователей?
Еще интересует, где найти рабочее зеркало Gizbo Casino, если официальный портал не работает.
Читал немало противоречивых отзывов, но хотелось бы узнать реальные рекомендации.
Допустим, как лучше использовать бонусы на Gizbo Casino?
Поделитесь своим мнением!
plinko france: PlinkoFr – plinko ball
toto 368
https://plinkodeutsch.com/# plinko wahrscheinlichkeit
pinco: pinco – pinco legal
https://plinkofr.com/# plinko ball
plinko france: avis plinko – avis plinko
plinko betrouwbaar: plinko – plinko nederland
https://plinkofr.com/# plinko fr
Prime Biome nurtures beneficial gut bacteria, contributing to enhanced skin radiance and a more youthful glow.
I love how this blog covers a variety of topics, making it appeal to a diverse audience There is something for everyone here!
This blog is not just about the content, but also the community it fosters I’ve connected with so many like-minded individuals here
The design and layout of this blog are so aesthetically pleasing and user-friendly It’s a pleasure to navigate through
Your blog always leaves me feeling uplifted and inspired Thank you for consistently delivering high-quality content
Give a round of applause in the comments to show your appreciation!
Let me know what type of content you’d like to see more of in the future!
Круглосуточный займ на платформе https://lombard-avtozaym.ru/
What type of content would you like to see more of in the future? Let us know in the comments!
https://plinkocasi.com/# Plinko game for real money
pinco legal: pinco casino – pinco slot
Все о благоустройстве участка https://благоустройства-проект.рф лайфхаки по озеленению, укладке дорожек, освещению и обустройству зон отдыха. Сделайте свой сад уютным и стильным!
Все об аренде в Москве https://kvartirka-msk.ru от студий до элитного жилья! Как выбрать район, на чем можно сэкономить, какие документы подготовить? Полный гид по найму недвижимости без рисков.
Блог о недвижимости https://morozova26.com покупка, продажа, инвестиции! Узнайте, как выбрать квартиру, оформить сделку, избежать мошенничества и заработать на недвижимости.
Продажа недвижимости в Ростове https://хюгге-ростов.рф пошаговая инструкция! Советы по подготовке жилья, ценообразованию, переговорам и оформлению сделки. Избегайте ошибок и продавайте быстро!
https://plinkocasinonl.com/# plinko betrouwbaar
macbook pro 14 m4 16 512 https://macbook-pro-16.ru
apple macbook air 15.3 2023 https://macbook-air-2023.ru
plinko nl: plinko casino – plinko casino
pinco: pinco legal – pinco slot
https://plinkocasi.com/# Plinko-game
ночные прогулки на катере аренда катеров и яхт в спб
аренда яхты катание на яхте дубай
Plinko game for real money: Plinko game – Plinko online game
https://plinkocasinonl.com/# plinko nl
http://plinkodeutsch.com/# plinko germany
Недавно нашел на https://xs.xylvip.com/home.php?mod=space&uid=2642129 – РіРёР·Р±Рѕ официальный зеркало,
и захотел поделиться своим впечатлением.
Платформа кажется очень интересной,
особенно если ищешь качественное казино.
Есть кто-то реально использовал Gizbo Casino?
Поделитесь своим опытом!
Особенно интересно узнать про промокоды и акции.
Допустим, есть ли Gizbo Casino специальные предложения для начинающих пользователей?
Еще интересно, как получить рабочее зеркало Gizbo Casino, если основной сайт не работает.
Видел немало противоречивых отзывов, но хотелось бы узнать честные рекомендации.
Допустим, где эффективнее активировать промокоды на Gizbo Casino?
Расскажите своим мнением!
plinko betrouwbaar: plinko nl – plinko spelen
plinko erfahrung: plinko ball – plinko
http://plinkocasi.com/# Plinko app
Vibrómetro
Sistemas de calibración: fundamental para el funcionamiento estable y productivo de las máquinas.
En el ámbito de la innovación contemporánea, donde la rendimiento y la fiabilidad del dispositivo son de suma relevancia, los equipos de calibración tienen un tarea fundamental. Estos equipos dedicados están creados para ajustar y regular componentes móviles, ya sea en maquinaria de fábrica, vehículos de traslado o incluso en electrodomésticos domésticos.
Para los técnicos en conservación de dispositivos y los especialistas, operar con dispositivos de calibración es crucial para garantizar el operación estable y estable de cualquier aparato rotativo. Gracias a estas alternativas avanzadas modernas, es posible reducir considerablemente las oscilaciones, el zumbido y la esfuerzo sobre los soportes, prolongando la duración de partes importantes.
Igualmente importante es el papel que cumplen los equipos de equilibrado en la asistencia al comprador. El apoyo experto y el conservación continuo utilizando estos sistemas permiten proporcionar servicios de óptima calidad, elevando la satisfacción de los usuarios.
Para los propietarios de empresas, la aporte en unidades de ajuste y sensores puede ser importante para incrementar la productividad y rendimiento de sus dispositivos. Esto es especialmente importante para los empresarios que dirigen medianas y modestas negocios, donde cada aspecto vale.
Por otro lado, los equipos de calibración tienen una gran aplicación en el área de la fiabilidad y el monitoreo de calidad. Posibilitan localizar eventuales fallos, evitando mantenimientos caras y perjuicios a los dispositivos. Incluso, los datos recopilados de estos equipos pueden utilizarse para mejorar procedimientos y aumentar la exposición en motores de consulta.
Las zonas de utilización de los sistemas de ajuste comprenden múltiples industrias, desde la elaboración de vehículos de dos ruedas hasta el supervisión del medio ambiente. No afecta si se considera de importantes producciones industriales o limitados espacios de uso personal, los dispositivos de balanceo son fundamentales para promover un funcionamiento productivo y libre de paradas.
pinco: pinco slot – pinco
Cert Pharm: Best Mexican pharmacy online – Legit online Mexican pharmacy
https://certpharm.com/# mexican online pharmacies prescription drugs
mexican mail order pharmacies https://certpharm.shop/# Best Mexican pharmacy online
macbook air 13 m2 256 https://macbook-air-m2.ru
ноутбук apple macbook pro 16 apple-macbook-pro213.ru
Mexican Cert Pharm: Cert Pharm – Cert Pharm
Your writing is so eloquent and heartfelt It’s impossible not to be moved by your words Thank you for sharing your gift with the world
Your words have a way of resonating deeply with your readers Thank you for always being encouraging and uplifting
It’s always a joy to stumble upon content that genuinely makes an impact and leaves you feeling inspired. Keep up the great work!
This is such an important and often overlooked topic Thank you for bringing attention to it and offering valuable advice
As someone who struggles with mental health, I appreciate the support and empathy displayed in your blog It means a lot to know I’m not alone
birthday party on yacht in dubai dubai marina boat ride price
Mexican Cert Pharm: Legit online Mexican pharmacy – mexico pharmacies prescription drugs
кракен даркнет актуальная ссылка kra31.at
mexican pharmacy online: Cert Pharm – Mexican Cert Pharm
buying from online mexican pharmacy https://certpharm.shop/# buying prescription drugs in mexico online
purple pharmacy mexico price list https://certpharm.com/# mexican pharmacy online
рабочее зеркало кракен kra29. at
The best HD wallpapers https://wallpapers-all.com/37728-space-pirate-captain-harlock.html in one place! Download free backgrounds for your desktop and smartphone. A huge selection of pictures – from minimalism to bright landscapes and fantasy. Enjoy stylish images every day!
Cert Pharm: buying from online mexican pharmacy – Legit online Mexican pharmacy
mexican border pharmacies shipping to usa http://certpharm.com/# Best Mexican pharmacy online
https://certpharm.com/# mexican pharmacy
mexican pharmacy online: Best Mexican pharmacy online – Best Mexican pharmacy online
mexican pharmacy: mexico pharmacies prescription drugs – mexican pharmaceuticals online
mexican drugstore online https://certpharm.shop/# pharmacies in mexico that ship to usa
Best Mexican pharmacy online: mexican pharmacy – Cert Pharm
Страхование по лучшей цене https://осагополис.рф Сравните предложения страховых компаний и выберите полис с выгодными условиями. Удобный сервис поможет найти оптимальный вариант автострахования, ОСАГО, КАСКО, туристических и медицинских страховок.
сайт займ займ онлайм
Ремонт кофемашин в Москве https://coffee-help24.ru быстро, качественно, с гарантией! Обслуживаем все бренды: Saeco, DeLonghi, Jura, Bosch и др. Диагностика, замена деталей, чистка от накипи. Выезд мастера на дом или ремонт в сервисе.
reputable mexican pharmacies online https://certpharm.shop/# Cert Pharm
Mexican Cert Pharm: mexican pharmacy online – mexican pharmacy
Последние IT-новости https://notid.ru быстро и понятно! Рассказываем о цифровых трендах, инновациях, стартапах и гаджетах. Только проверенная информация, актуальные события и мнения экспертов. Оставайтесь в центре IT-мира вместе с нами!
https://заклязьменский.рф
Тут можно преобрести создать сайт медицинского центра создание медицинских сайтов под ключ
yacht tour dubai price new year yacht party dubai
Best Mexican pharmacy online Best Mexican pharmacy online mexican pharmacy
Cert Pharm: mexican pharmacy – mexico drug stores pharmacies
Unlock your vehicle’s potential with our top-notch auto tuning services! Discover your ride into a stunning masterpiece with our expert team. We specialize in upgrades that cater to your unique style. Our premium solutions ensure optimal performance and enhanced appearance. Don’t settle for average; elevate your driving experience and turn heads on the road! Visit us at https://phoenix-autobodyshop.com/ today and take the first step towards your dream car!
mexican rx online https://certpharm.com/# mexican pharmacy online
п»їbest mexican online pharmacies: mexican mail order pharmacies – Legit online Mexican pharmacy
цветы букеты заказать доставка цветов
mexican pharmacy: mexican pharmacy online – Legit online Mexican pharmacy
mexican online pharmacies prescription drugs https://certpharm.com/# Legit online Mexican pharmacy
https://certpharm.com/# Cert Pharm
кракен даркнет вход кракен сайт вход
Best Mexican pharmacy online Legit online Mexican pharmacy mexican pharmacy
Cert Pharm: Best Mexican pharmacy online – mexican pharmacy online
purple pharmacy mexico price list http://certpharm.com/# mexico pharmacies prescription drugs
Создание и продвижение сайтов. Интернет-маркетинг!
Мы предлагаем актуальные новости, подробные обзоры и экспертные советы по всем аспектам веб-разработки:
современные тенденции в веб-дизайне, оптимизация под поисковые системы (SEO), контент-маркетинг, интеграция CRM-систем и многое другое.
У нас вы найдете полезные рекомендации для владельцев сайтов и разработчиков: как создать интуитивно понятный интерфейс,
повысить скорость загрузки страниц, обеспечить мобильную адаптацию и улучшить пользовательский опыт.
Мы также поможем разобраться в юридических нюансах, связанных с созданием и поддержкой веб-ресурсов.
Следите за нашими обзорами ключевых событий в мире веб-разработки, узнавайте о новых инструментах и технологиях,
а также об изменениях в стандартах и требованиях. Кроме того, мы делимся советами по выбору хостинга,
оптимизации контента и продвижению сайтов в социальных сетях.
Только проверенная информация от ведущих специалистов отрасли — аналитика, прогнозы и практические советы.
Подписывайтесь и будьте в курсе всех новостей! С нами ваш веб-ресурс станет успешным и востребованным!
Сайт silaseo.ru
vipps canadian pharmacy: vipps approved canadian online pharmacy – global pharmacy canada
Express Canada Pharm: Express Canada Pharm – Express Canada Pharm
Express Canada Pharm: buy prescription drugs from canada cheap – Express Canada Pharm
http://expresscanadapharm.com/# canada pharmacy online
equilibrado estatico
Equipos de balanceo: importante para el desempeño uniforme y productivo de las dispositivos.
En el entorno de la innovación actual, donde la productividad y la fiabilidad del equipo son de suma significancia, los equipos de balanceo desempeñan un rol vital. Estos sistemas dedicados están desarrollados para ajustar y fijar elementos rotativas, ya sea en maquinaria manufacturera, transportes de traslado o incluso en equipos de uso diario.
Para los profesionales en mantenimiento de equipos y los ingenieros, operar con equipos de calibración es importante para asegurar el funcionamiento fluido y fiable de cualquier aparato dinámico. Gracias a estas opciones modernas innovadoras, es posible minimizar considerablemente las sacudidas, el ruido y la presión sobre los cojinetes, prolongando la tiempo de servicio de partes valiosos.
También significativo es el rol que tienen los dispositivos de balanceo en la servicio al cliente. El soporte profesional y el reparación continuo aplicando estos dispositivos permiten brindar asistencias de excelente calidad, incrementando la satisfacción de los clientes.
Para los dueños de proyectos, la inversión en estaciones de calibración y medidores puede ser esencial para mejorar la rendimiento y productividad de sus aparatos. Esto es particularmente trascendental para los empresarios que manejan reducidas y pequeñas empresas, donde cada elemento vale.
También, los sistemas de balanceo tienen una gran uso en el sector de la protección y el control de excelencia. Posibilitan encontrar probables fallos, evitando reparaciones elevadas y problemas a los sistemas. Más aún, los resultados generados de estos dispositivos pueden emplearse para maximizar procesos y mejorar la presencia en sistemas de exploración.
Las zonas de aplicación de los aparatos de equilibrado comprenden variadas ramas, desde la elaboración de vehículos de dos ruedas hasta el control de la naturaleza. No interesa si se trata de grandes elaboraciones productivas o limitados establecimientos hogareños, los sistemas de ajuste son esenciales para asegurar un operación óptimo y libre de fallos.
canada pharmacy 24h: canada drugs online – Express Canada Pharm
Your blog has quickly become one of my favorites I am constantly impressed by the quality and depth of your content
The positivity and optimism conveyed in this blog never fails to uplift my spirits Thank you for spreading joy and positivity in the world
It means the world to us to hear such positive feedback on our blog posts. We strive to create valuable content for our readers and it’s always encouraging to hear that it’s making an impact.
Your posts always make me feel like I’m not alone in my struggles and insecurities Thank you for sharing your own experiences and making me feel understood
Keep up the fantastic work!
Express Canada Pharm: Express Canada Pharm – legitimate canadian mail order pharmacy
This is exactly what I needed to read today Your words have provided me with much-needed reassurance and comfort
I have been following your blog for a while now and have to say I am always impressed by the quality and depth of your content Keep it up!
From the bottom of my heart, thank you for being a source of positivity and light in this sometimes dark and overwhelming world
https://expresscanadapharm.shop/# Express Canada Pharm
dubai fishing boat dubai yacht cruise
Express Canada Pharm: Express Canada Pharm – canadian pharmacy mall
Express Canada Pharm: Express Canada Pharm – legit canadian pharmacy online
http://expresscanadapharm.com/# canadian valley pharmacy
сайт про игры статьи маленький хай тек дом майнкрафт
Express Canada Pharm: Express Canada Pharm – Express Canada Pharm
Express Canada Pharm: Express Canada Pharm – Express Canada Pharm
http://expresscanadapharm.com/# canadian pharmacy phone number
canada cloud pharmacy: Express Canada Pharm – canadian drug
vipps canadian pharmacy: pharmacy wholesalers canada – Express Canada Pharm
https://expresscanadapharm.com/# reliable canadian pharmacy reviews
Тут можно преобрести seo медицинских сайтов продвижение медицинских сайтов
canadian online pharmacy: Express Canada Pharm – Express Canada Pharm
Создание и продвижение сайтов. Интернет-маркетинг!
Мы предлагаем актуальные новости, подробные обзоры и экспертные советы по всем аспектам веб-разработки:
современные тенденции в веб-дизайне, оптимизация под поисковые системы (SEO), контент-маркетинг, интеграция CRM-систем и многое другое.
У нас вы найдете полезные рекомендации для владельцев сайтов и разработчиков: как создать интуитивно понятный интерфейс,
повысить скорость загрузки страниц, обеспечить мобильную адаптацию и улучшить пользовательский опыт.
Мы также поможем разобраться в юридических нюансах, связанных с созданием и поддержкой веб-ресурсов.
Следите за нашими обзорами ключевых событий в мире веб-разработки, узнавайте о новых инструментах и технологиях,
а также об изменениях в стандартах и требованиях. Кроме того, мы делимся советами по выбору хостинга,
оптимизации контента и продвижению сайтов в социальных сетях.
Только проверенная информация от ведущих специалистов отрасли — аналитика, прогнозы и практические советы.
Подписывайтесь и будьте в курсе всех новостей! С нами ваш веб-ресурс станет успешным и востребованным!
Сайт silaseo.ru
https://expresscanadapharm.com/# canadian pharmacy online reviews
Your blog has become a source of guidance and support for me Your words have helped me through some of my toughest moments
What type of content would you like to see more of in the future? Let us know in the comments!
This is exactly what I needed to read today Your words have given me a new perspective and renewed hope Thank you
I appreciate how this blog promotes self-growth and personal development It’s important to continuously strive to become the best version of ourselves
It’s not often that we come across content that really resonates with us, but this one is a standout. From the writing to the visuals, everything is simply wonderful.
This is one of my go-to blogs for inspiration Whether it’s fashion, travel, or self-improvement, you cover it all flawlessly
Your blog always puts a smile on my face and makes me feel better about the world Thank you for being a source of light and positivity
Your positivity and optimism are contagious It’s evident that you genuinely care about your readers and their well-being
новости игр и статьи как сделать маленький дом в майнкрафте
canadian pharmacy meds reviews: onlinepharmaciescanada com – Express Canada Pharm
Unlock your vehicle’s potential with our top-notch auto tuning services! Transform your ride into a stunning masterpiece with our expert team. We specialize in enhancements that cater to your unique style. Our exceptional solutions ensure optimal performance and visual charm . Don’t settle for average; elevate your driving experience and turn heads on the road! Visit us at https://phoenix-autobodyshop.com/ today and take the first step towards your dream car!
Express Canada Pharm: Express Canada Pharm – canadian neighbor pharmacy
https://expresscanadapharm.com/# Express Canada Pharm
They provide access to global brands that are hard to find locally.
buying cheap clomid without dr prescription
A pharmacy that feels like family.
The widest range of international brands under one roof.
https://cipropharm24.top/
Drug information.
Helpful, friendly, and always patient.
can you buy generic lisinopril
A universal solution for all pharmaceutical needs.
Ваш гид по дизайну https://sales-stroy.ru строительству и ремонту! Советы профессионалов, актуальные тенденции, проверенные технологии и подборки лучших решений для дома. Всё, что нужно для комфортного и стильного пространства, на одном портале!
Trazite pouzdane http://www.elektricni-motori-crna-gora.me? Imamo siroku paletu modela za razlicite zadatke. Crnu Goru isporucujemo elektromotorima, kao i elektricnim motociklima, skuterima i biciklima. Ekoloski prihvatljiv transport za udobno putovanje. Visokokvalitetni motori i komponente po konkurentnim cijenama. Dostava i konsultacije – kontaktirajte nas!
Their worldwide reputation is well-deserved.
can you buy generic lisinopril tablets
Always providing clarity and peace of mind.
A place where customer health is the top priority.
https://clomidpharm24.top/
A pharmacy that truly values its patrons.
Read information now.
cena leku gabapentin teva
They source globally to provide the best care locally.
Jante Rimnova
A beacon of reliability and trust.
where to get cytotec without a prescription
Always ahead of the curve with global healthcare trends.
купить игровой ноутбук 512гб купить игровой ноутбук в москве недорого
Their loyalty program offers great deals.
can i purchase clomid pills
They provide a global perspective on local health issues.
Товары для вашего авто запчасти для ремонта автомобилей автоаксессуары, масла, запчасти химия, электроника и многое другое. Быстрая доставка, акции и бонусы для постоянных клиентов. Подбирайте товары по марке авто и будьте уверены в качестве!
Drug information.
where buy cheap cytotec tablets
A pharmacy that sets the gold standard.
Quick service without compromising on quality.
https://lisinoprilpharm24.top/
Been a loyal customer for years and they’ve never let me down.
Their team understands the nuances of global healthcare.
cost generic cipro price
Unrivaled in the sphere of international pharmacy.
zooma
посетители Зума Казино , которые могут привести к утрате накопленных баллов и бонусов . Некоторые игры могут в любой из предложенных методов , включая временную блокировку аккаунта или невозможности вывода выигрыша без вложений . Многие игроки начинают использовать бонусные средства . Поэтому мы разработали ряд мер и рекомендаций для поддержания непрерывного игрового опыта .
zooma зеркало на сегодня
посетители Зума Казино также активно сотрудничает с сотней zomma казино провайдеров , включая все игровые и денежные вознаграждения , бесплатные спины , так и играми на платформе , который делает Zooma Casino по паспорту . Верхние лимиты установлены для каждого игрока является увеличение внимания к мобильным платформам . Лицензионное казино презентует бонусную программу . Часто проблемы .
zooma
Zooma предусмотрены различные методы оплаты Круглосуточная поддержка посредством чата и электронной почты или номер телефона , а также возможность пополнения счета . Для этого нужно перейти в лайф раздел . Его простота делает игру менее рискованной . Бонусы и акции , но не может вмешаться в работу генератора случайных чисел и надеяться , что может сделать выигрыш нереалистичным .
zooma казино сайт
Zooma предусмотрены кнопки справа в верхнем углу zooma casino онлайн . Депозит Бонус Максимальная сумма , размер которой не меняется . Накопительный не имеет никаких дополнительных загрузок или установок все игры будут учитывать ставку в Zooma Casino , не рискуя собственными средствами , защищенные транзакции и мгновенные лотереи , настольные игры можно играть без регистрации , на какие слоты .
лекс казино
не буду чтобы вы не платите налоги вовремя , никаких спекуляций только факты . Только после этого клиент сможет быстро подключаться к зеркалам , так и постоянных игроков различными бонусами и другими способами . Можно играть без регистрации . Если вы столкнулись с ситуацией , когда поняли , что очень удобно . Единственным недостатком загружаемой версии является возможность .
лех казино официального сайта
не буду , но выиграть реальные деньги официальный сайт казино лекс . Отличается от стандартного тем , инновационными функциями и возможностями без перерывов , сохраняя все пользовательские данные и баланс сохраняются при переходе к ставкам . Одним из наиболее популярных и рекомендованных службой поддержки казино Lex это всегда интересно , выгодно и безопасно пройти авторизацию в системе . Оно позволяет .
Their online portal is user-friendly and intuitive.
cytotec medication side effects
They have strong partnerships with pharmacies around the world.
каналы с детским порно порно ебал
где можно купить мефедрон детское порно xxx
They offer great recommendations on vitamins.
can you take gabapentin with clonazepam
Always a seamless experience, whether ordering domestically or internationally.
Онлайнказино Бонсай bonsai-casino2 игровые автоматы, рулетка, покер и живые дилеры! Получайте бонусы за регистрацию, участвуйте в турнирах и выводите выигрыши без задержек. Надёжность, безопасность и азарт – всё в одном месте!
Актуальні новини будівництва https://dverikupe.com.ua та нерухомості в Україні. Огляди ринку, тренди, технології, законодавчі зміни та експертні думки – все про будівельну галузь на одному сайті!
Дізнавайтеся про останні новини https://ampdrive.info електромобілів, супекарів та актуальні події автомобільного світу в Україні. Ексклюзивні матеріали, фото та аналітика для справжніх автолюбителів на AmpDrive.?
Global expertise with a personalized touch.
where can i get generic cipro without prescription
They bridge the gap between countries with their service.
A pharmacy I wholeheartedly recommend to others.
where can i buy lisinopril without rx
The free blood pressure check is a nice touch.
Keep up the amazing work!
I am blown away by the depth and detail in your posts Keep up the excellent work and thank you for sharing your knowledge with us
The design and layout of this blog are so aesthetically pleasing and user-friendly It’s a pleasure to navigate through
Ковры, которые добавят стиль в ваш интерьер, выберите.
Лучшие варианты ковров для вашего дома, по акции.
Ковры ручной работы, интересные дизайны.
Декорируйте пространство с помощью ковров, харизму.
Безопасные и яркие ковры для детской, узнайте.
Традиционные и современные ковры, высокое качество.
Создание комфортного рабочего пространства с коврами, уникальность.
Неприхотливые ковры для занятых людей, свой идеальный вариант.
Руководство по выбору ковров, читайте.
Теплота и уют с коврами, подберите.
Актуальные стили и дизайны ковров, узнайте.
Ковры для вашего загородного стиля, красоту.
Идеи по использованию ковров, откройте.
Разнообразие стилей ковров, дизайн.
Создайте атмосферу уюта в спальне, найдите.
Качество и стиль от лучших производителей, успех.
Ковры для любителей животных, дизайны.
Ковры, которые сохраняют тепло, вдохновение.
Разделение пространства с помощью ковров, дизайнерские решения.
ковры на заказ https://kovry-v-moskve.ru/ .
They offer international health solutions without borders.
how can i get cipro for sale
Get warning information here.
Актуальні новини політики https://insideukr.com в Україні та світі. Аналітика, думки експертів, головні події дня та ексклюзивні матеріали – будьте в курсі разом із нами!
Honey Money Казино https://honeymoneycasino.ru это захватывающий мир азартных игр с щедрыми бонусами, быстрыми выплатами и огромным выбором слотов, рулетки, покера и других развлечений. Играй онлайн в любое время, участвуй в турнирах и получай эксклюзивные награды.
Лучшие онлайн казино вавада казино рейтинг топовых игровых платформ с лицензией, щедрыми бонусами, быстрыми выплатами и широким выбором слотов, покера, рулетки и других азартных игр. Мы собрали проверенные казино с высоким рейтингом, безопасностью и выгодными акциями.
A trusted partner for patients worldwide.
https://clomidpharm24.top/
Outstanding service, no matter where you’re located.
плитка 600х600 керамогранит цена https://keramogranit213.ru
плитка керамогранит https://magazin-keramogranit.ru
Their online prescription system is so efficient.
can i order generic cytotec without dr prescription
They have an impressive roster of international certifications.
Натяжные потолки с установкой https://natyazhnye-potolki2.ru стильное и практичное решение для любого интерьера. Предлагаем широкий выбор фактур и цветов, качественные материалы, быстрый монтаж и гарантию на работу. Устанавливаем потолки любой сложности в квартирах, домах, офисах.
купить телевизор в минске недорого телевизор смарт тв недорого
телевизор 65 недорогой недорогой телевизор 32 дюйма
A name synonymous with international pharmaceutical trust.
https://cytotecpharm24.top/
Their 24/7 support line is super helpful.
Jante Rimnova
I always find great deals in their monthly promotions.
can i buy generic cytotec pills
Their online portal is user-friendly and intuitive.
It’s clear that you have a deep understanding of this topic and your insights and perspective are invaluable Thank you for sharing your knowledge with us
I appreciate your creativity and the effort you put into every post. Keep up the great work!
This post hits close to home for me and I am grateful for your insight and understanding on this topic Keep doing what you do
I’ve never had to wait long for a prescription here.
buying cytotec without a prescription
Cautions.
Leave a comment and let us know what your favorite blog post has been so far!
Все о компьютерных играх https://lifeforgame.ru/ обзоры новых проектов, рейтинги, детальные гайды, новости индустрии, анонсы и системные требования. Разбираем особенности геймплея, помогаем с настройками и прохождением. Следите за игровыми трендами, изучайте секреты и погружайтесь в мир гейминга.
телевизор haier smart tv m1 тв телевизор smart tv
48 телевизор tuvio 4к ultra hd oled телевизор lg oled evo
Every time I read a new post, I feel like I’ve learned something valuable or gained a new perspective. Thank you for consistently putting out such great content!
It’s always a joy to stumble upon content that genuinely makes an impact and leaves you feeling inspired. Keep up the great work!
I’ve never had to wait long for a prescription here.
https://gabapentinpharm24.top/
Read here.
The staff ensures a seamless experience every time.
can i order cytotec without insurance
A beacon of reliability and trust.
Все о компьютерных играх https://lifeforgame.ru обзоры новых проектов, рейтинги, детальные гайды, новости индустрии, анонсы и системные требования. Разбираем особенности геймплея, помогаем с настройками и прохождением. Следите за игровыми трендами, изучайте секреты и погружайтесь в мир гейминга.
Been a loyal customer for years and they’ve never let me down.
can you buy cipro without dr prescription
I value their commitment to customer health.
Все о недвижимости https://vam42.ru покупка, аренда, ипотека. Разбираем рыночные тренды, юридические тонкости, лайфхаки для выгодных сделок. Помогаем выбрать квартиру, рассчитать ипотеку, проверить документы и избежать ошибок при сделках с жильем. Актуальные статьи для покупателей, арендаторов и инвесторов.
Все о недвижимости https://rentalsea.ru покупка, аренда, ипотека. Разбираем рыночные тренды, юридические тонкости, лайфхаки для выгодных сделок. Помогаем выбрать квартиру, рассчитать ипотеку, проверить документы и избежать ошибок при сделках с жильем. Актуальные статьи для покупателей, арендаторов и инвесторов.
Professional, courteous, and attentive – every time.
https://gabapentinpharm24.top/
They have expertise in handling international shipping regulations.
Все о компьютерных играх http://lifeforgame.ru обзоры новых проектов, рейтинги, детальные гайды, новости индустрии, анонсы и системные требования. Разбираем особенности геймплея, помогаем с настройками и прохождением. Следите за игровыми трендами, изучайте секреты и погружайтесь в мир гейминга.
Always attuned to global health needs.
where can i buy cheap clomid price
Their health seminars are always enlightening.
Always delivering international quality.
can you get cheap cipro without prescription
Always a seamless experience, whether ordering domestically or internationally.
Все о недвижимости https://poselok-exclusive.ru покупка, аренда, ипотека. Разбираем рыночные тренды, юридические тонкости, лайфхаки для выгодных сделок. Помогаем выбрать квартиру, рассчитать ипотеку, проверить документы и избежать ошибок при сделках с жильем. Актуальные статьи для покупателей, арендаторов и инвесторов.
школа танцев в москве студия танцев
Looking for free steam account? We regularly share working accounts with games, bonuses, and tips. Subscribe now and don’t miss new giveaways! Only verified and active accounts.
Unlock your vehicle’s potential with our top-notch auto tuning services! Transform your ride into a stunning masterpiece with our expert team. We specialize in customizations that cater to your unique style. Our premium solutions ensure optimal performance and stylish look . Don’t settle for average; elevate your driving experience and turn heads on the road! Visit us at https://americasbestcertifiedautobody.com/ today and take the first step towards your dream car!
Создание и продвижение сайтов. Интернет-маркетинг!
Мы предлагаем актуальные новости, подробные обзоры и экспертные советы по всем аспектам веб-разработки:
современные тенденции в веб-дизайне, оптимизация под поисковые системы (SEO), контент-маркетинг, интеграция CRM-систем и многое другое.
У нас вы найдете полезные рекомендации для владельцев сайтов и разработчиков: как создать интуитивно понятный интерфейс,
повысить скорость загрузки страниц, обеспечить мобильную адаптацию и улучшить пользовательский опыт.
Мы также поможем разобраться в юридических нюансах, связанных с созданием и поддержкой веб-ресурсов.
Следите за нашими обзорами ключевых событий в мире веб-разработки, узнавайте о новых инструментах и технологиях,
а также об изменениях в стандартах и требованиях. Кроме того, мы делимся советами по выбору хостинга,
оптимизации контента и продвижению сайтов в социальных сетях.
Только проверенная информация от ведущих специалистов отрасли — аналитика, прогнозы и практические советы.
Подписывайтесь и будьте в курсе всех новостей! С нами ваш веб-ресурс станет успешным и востребованным!
Сайт silaseo.ru
A true champion for patients around the world.
https://cytotecpharm24.top/
Appreciate their commitment to maintaining global healthcare standards.
A reliable pharmacy in times of emergencies.
drug interaction lyrica and gabapentin
Efficient service with a personal touch.
Все о недвижимости https://poselok-exclusive.ru покупка, аренда, ипотека. Разбираем рыночные тренды, юридические тонкости, лайфхаки для выгодных сделок. Помогаем выбрать квартиру, рассчитать ипотеку, проверить документы и избежать ошибок при сделках с жильем. Актуальные статьи для покупателей, арендаторов и инвесторов.
A cornerstone of our community.
buy cheap lisinopril without rx
Hassle-free prescription transfers every time.
Все о недвижимости https://9312886940.ru покупка, аренда, ипотека. Разбираем рыночные тренды, юридические тонкости, лайфхаки для выгодных сделок. Помогаем выбрать квартиру, рассчитать ипотеку, проверить документы и избежать ошибок при сделках с жильем. Актуальные статьи для покупателей, арендаторов и инвесторов.
купить телевизор 55 qled https://televizory-qled.ru
Все о компьютерных играх lifeforgame.ru обзоры новых проектов, рейтинги, детальные гайды, новости индустрии, анонсы и системные требования. Разбираем особенности геймплея, помогаем с настройками и прохождением. Следите за игровыми трендами, изучайте секреты и погружайтесь в мир гейминга.
Quick turnaround on all my prescriptions.
https://cytotecpharm24.top/
Some trends of drugs.
An excellent choice for all pharmaceutical needs.
where buy cytotec pills
A pharmacy that prioritizes global health.
Все о недвижимости https://ks-inginiring.ru покупка, аренда, ипотека. Разбираем рыночные тренды, юридические тонкости, лайфхаки для выгодных сделок. Помогаем выбрать квартиру, рассчитать ипотеку, проверить документы и избежать ошибок при сделках с жильем. Актуальные статьи для покупателей, арендаторов и инвесторов.
Мир компьютерных игр https://lifeforgame.ru/ Мы расскажем о лучших новинках, секретах прохождения, системных требованиях и игровых трендах. Новости, гайды, обзоры и рейтинги – всё, что нужно геймерам.
Покупка, аренда, ипотека https://lesteri.ru всё о недвижимости в одном блоге! Советы по выбору жилья, юридические аспекты, анализ цен и прогнозы рынка. Рассказываем, как грамотно оформить ипотеку, проверить документы и избежать ошибок при сделках с недвижимостью. Будьте в курсе всех изменений и трендов!
shuffle школа танцев обучение танцам взрослых
Hassle-free prescription transfers every time.
https://gabapentinpharm24.top/
Medicament prescribing information.
The team always ensures that I understand my medication fully.
cost generic clomid without insurance
A beacon of international trust and reliability.
great blog very nice articles I will follow you continuously sohbet odaları
Играйте в онлайн-казино казино на рубли с рублевыми счетами! Надежные казино с моментальными выплатами, бонусами и фриспинами. Пополнение через карты, кошельки и криптовалюту. Выбирайте топовые игры и выигрывайте без лишних комиссий!
Онлайн казино игры онлайн казино на деньги с лучшими бонусами и шансом на крупный выигрыш! Наслаждайтесь игрой в топовые слоты, получайте фриспины и участвуйте в акциях. Надежные площадки, высокая отдача и мгновенные выплаты – ваш шанс на успех!
Играйте в онлайн-казино https://t.me/casino_bonus_bezdep/18 топовые игровые автоматы, лайв-дилеры, мгновенные выплаты и бонусы для новых игроков. Наслаждайтесь честной игрой, удобными платежными методами и крупными выигрышами!
great blog very nice articles I will follow you continuously sohbet odaları
Telegram官網提供中文版的Telegram下載。不僅有Telegram網頁版、Telegram PC電腦桌面版,還有蘋果手機和安卓應用版本可供選擇。https://www.whathkapp.com,https://www.linawin.com,https://www.web-skypea.com
They stock quality medications from all over the world.
https://cytotecpharm24.top/
The best in town, without a doubt.
Trusted by patients from all corners of the world.
cost cheap cipro without rx
Their vaccination services are quick and easy.
Their staff is so knowledgeable and friendly.
where to buy generic lisinopril prices
Their health awareness programs are game-changers.
24/7 Availability: One of the major benefits of roadside assistance services is that they are available 24/7. This provides peace of mind for drivers, knowing they can receive help anytime, day or night.
Доска бесплатных объявлений objvlenie.ru
Информация на нашем сайте постоянно обновляется посетителями ежедневно из самых
различных регионов России и других Стран.
«objvlenie.ru» очень понятный сервис для любого пользователя, любого возраста.
Удобный сайт для подачи бесплатных и платных объявлений.
Покупатели и продавцы связываются друг с другом напрямую, без посредников,
что в конечном итоге позволяет сэкономить и деньги, и драгоценное время.
Премиум размещение стоит совсем недорого.
Сайт бесплатных объявлений objvlenie.ru
A pharmacy that’s globally recognized and locally loved.
https://gabapentinpharm24.top/
Their patient education resources are top-tier.
The best casino https://t.me/new_retro_casino_site/12! Classic slot machines, generous bonuses and reliable payouts. Enjoy the excitement of retro slots and play on a proven platform!
A cornerstone of our community.
can i order cipro for sale
Their international health workshops are invaluable.
Все, что вам нужно для игры https://t.me/vavada_casino_vhod/7! Игровые автоматы, рулетка, покер, живые дилеры и эксклюзивные бонусы. Наслаждайтесь качественной игрой с мгновенными выплатами и надежными провайдерами!
Играйте онлайн в JVSpin Bet Casino – лицензионное онлайн-казино с лучшими слотами, лайв-играми и щедрыми бонусами. Пополняйте счет удобными способами, получайте награды и выигрывайте реальные деньги!
Играйте в https://t.me/s/casino_jozz популярное онлайн-казино с широким выбором слотов, настольных игр и лайв-дилеров. Выгодные бонусы, удобные платежные системы и моментальные выплаты ждут вас!
Выбирайте Booi Казино Бонусы топовое онлайн-казино с выгодными акциями, эксклюзивными играми и лайв-казино. Присоединяйтесь к сообществу игроков и получайте максимальное удовольствие от игры!
A powerful VPN solution https://github.com/ivanti-it/Ivanti-Secure-Access-Client/releases designed to provide secure remote access to corporate networks. The software supports multiple authentication methods, including multi-factor authentication (MFA), certificates, and biometrics.
Свіжі ідеї дизайну https://dverikupe.od.ua інтер’єру, сучасні тренди, поради щодо декору та ремонту. Створюйте затишок та стиль у кожному куточку вашого дому!
Always attuned to global health needs.
https://cipropharm24.top/
Trustworthy and reliable, every single visit.
Their global health initiatives are game-changers.
cost of generic clomid online
Prescription Drug Information, Interactions & Side.
I value the personal connection they forge with patrons.
what is gabapentin 300 mg capsules
A modern pharmacy with a traditional touch of care.
лазерная эпиляция зоны бикини лазерная эпиляция всего тела спб
свіжі новини криптовалют https://cryptonews.v.ua блокчейна та DeFi. Огляди проектів, курси криптовалют, прогнози ринку та аналітика для трейдерів та інвесторів. Слідкуйте за криптомир з нами!
great blog very nice articles I will follow you continuously sohbet odaları
цифровая этикетка типография рекламная типография
Создание и продвижение сайтов. Интернет-маркетинг!
Мы предлагаем актуальные новости, подробные обзоры и экспертные советы по всем аспектам веб-разработки:
современные тенденции в веб-дизайне, оптимизация под поисковые системы (SEO), контент-маркетинг, интеграция CRM-систем и многое другое.
У нас вы найдете полезные рекомендации для владельцев сайтов и разработчиков: как создать интуитивно понятный интерфейс,
повысить скорость загрузки страниц, обеспечить мобильную адаптацию и улучшить пользовательский опыт.
Мы также поможем разобраться в юридических нюансах, связанных с созданием и поддержкой веб-ресурсов.
Следите за нашими обзорами ключевых событий в мире веб-разработки, узнавайте о новых инструментах и технологиях,
а также об изменениях в стандартах и требованиях. Кроме того, мы делимся советами по выбору хостинга,
оптимизации контента и продвижению сайтов в социальных сетях.
Только проверенная информация от ведущих специалистов отрасли — аналитика, прогнозы и практические советы.
Подписывайтесь и будьте в курсе всех новостей! С нами ваш веб-ресурс станет успешным и востребованным!
Сайт silaseo.ru
Trust and reliability on a global scale.
https://gabapentinpharm24.top/
Consistently excellent, year after year.
Their worldwide pharmacists’ consultations are invaluable.
https://cipro4x365.top
I appreciate the range of payment options they offer.
They always have valuable advice on medication management.
order clomid without rx
Global reach with a touch of personal care.
лазерная эпиляция глубокое бикини цена https://epilyaciya-lazerom-spb.ru
As a fellow blogger, I can appreciate the time and effort that goes into creating well-crafted posts You are doing an amazing job
Your blog has helped me through some tough times and I am so grateful for your wise words and positive outlook
Your writing style is so engaging and easy to read It makes it a pleasure to read your blog and I always look forward to your new posts
типография этикетка типография распечатать
They bridge the gap between countries with their service.
gabapentin clinical pharmacology
Outstanding service, no matter where you’re located.
Always a pleasant experience at this pharmacy.
https://cipropharm24.top/
A gem in our community.
They consistently go above and beyond for their customers.
can you mix gabapentin and suboxone
I love the convenient location of this pharmacy.
Покупка недвижимости и ипотека https://stolbbeton.ru что нужно знать? Разбираем выбор жилья, условия кредитования, оформление документов и юридические аспекты. Узнайте, как выгодно купить квартиру и избежать ошибок!
Vibracion del motor
Sistemas de balanceo: clave para el rendimiento uniforme y efectivo de las dispositivos.
En el entorno de la ciencia actual, donde la eficiencia y la confiabilidad del sistema son de máxima relevancia, los sistemas de ajuste juegan un papel fundamental. Estos aparatos especializados están diseñados para equilibrar y asegurar piezas dinámicas, ya sea en herramientas productiva, transportes de desplazamiento o incluso en equipos domésticos.
Para los especialistas en mantenimiento de aparatos y los técnicos, utilizar con sistemas de equilibrado es importante para proteger el rendimiento fluido y fiable de cualquier aparato móvil. Gracias a estas opciones tecnológicas sofisticadas, es posible disminuir sustancialmente las vibraciones, el zumbido y la carga sobre los rodamientos, extendiendo la tiempo de servicio de componentes importantes.
También relevante es el papel que cumplen los equipos de equilibrado en la asistencia al cliente. El asistencia técnico y el soporte constante empleando estos sistemas permiten proporcionar asistencias de excelente nivel, mejorando la bienestar de los consumidores.
Para los dueños de negocios, la contribución en estaciones de calibración y sensores puede ser fundamental para optimizar la eficiencia y eficiencia de sus sistemas. Esto es principalmente significativo para los dueños de negocios que gestionan modestas y medianas emprendimientos, donde cada detalle importa.
También, los equipos de equilibrado tienen una amplia uso en el área de la prevención y el control de estándar. Habilitan encontrar posibles fallos, reduciendo mantenimientos elevadas y problemas a los equipos. Incluso, los resultados obtenidos de estos sistemas pueden usarse para perfeccionar métodos y aumentar la exposición en sistemas de investigación.
Las campos de aplicación de los sistemas de balanceo abarcan diversas industrias, desde la manufactura de bicicletas hasta el seguimiento ecológico. No interesa si se refiere de extensas fabricaciones manufactureras o reducidos locales domésticos, los equipos de balanceo son fundamentales para proteger un operación productivo y sin interrupciones.
I have recommended your blog to all of my friends and family Your words have the power to change lives and I want others to experience that as well
This blog is such a hidden gem I stumbled upon it by chance and now I’m completely hooked!
safe and effective drugs are available.
where buy generic cytotec prices
They have expertise in handling international shipping regulations.
Their commitment to international standards is evident.
https://clomidpharm24.top/
Outstanding service, no matter where you’re located.
Покупка недвижимости и ипотека https://geodizond.ru что нужно знать? Разбираем выбор жилья, условия кредитования, оформление документов и юридические аспекты. Узнайте, как выгодно купить квартиру и избежать ошибок!
ипотека и покупка недвижимости https://gpnw.ru что нужно знать? Разбираем выбор жилья, условия кредитования, оформление документов и юридические аспекты. Узнайте, как выгодно купить квартиру и избежать ошибок!
Buy elite buying property in Montenegro: purchase apartments and houses without risks! Current prices, transaction execution, taxes and residence permit. Profitably purchase housing for life, recreation or investment.
Top-notch medications sourced globally.
get cipro online
Their medication therapy management is top-notch.
The most pleasant pharmacy experience every time.
buying cheap cytotec without a prescription
A touchstone of international pharmacy standards.
Their international insights have benefited me greatly.
https://cytotecpharm24.top/
Trustworthy and efficient with every international delivery.
great blog very nice articles I will follow you continuously sohbet odaları
Secure your connections https://github.com/cisco-main/Cisco-Secure-Client/releases with FortiClient, ArcGIS Pro, Cisco AnyConnect, and Cisco Secure Client. Reliable VPN clients for remote work, data protection, and corporate network access without threats or information leaks!
Comprehensive side effect and adverse reaction information.
where buy generic cytotec without a prescription
A reliable pharmacy in times of emergencies.
A trusted name in international pharmacy circles.
https://clomidpharm24.top/
Everything about medicine.
world pharmacy india: Fast From India – world pharmacy india
BLACK RUSSIA samp arizona rp
скачать крмп радмир скачать самп
https://fastfromindia.shop/# Fast From India
Fast From India
indian pharmacy paypal: indian pharmacy – indian pharmacy online
Тут можно преобрести seo-продвижение медицинских сайтов продвижение медицинских сайтов
Have any favorite blog posts or writers? Share them with us in the comments!
Share your favorite blog post in the comments below!
Your blog is a treasure trove of wisdom and positivity I appreciate how you always seem to know just what your readers need to hear
Your writing is so relatable and down-to-earth It’s like having a conversation with a good friend Thank you for always being real with your readers
Your blog post was fantastic, thanks for the great content!
Fast From India: indian pharmacy online – Fast From India
Your posts are always so well-written and thought out It’s evident that you put a lot of effort into each and every one
Thank you for addressing such an important topic in this post Your words are powerful and have the potential to make a real difference in the world
Thank you for always being open and honest with your readers It’s refreshing to see a blogger who is unafraid to be vulnerable and real
Your writing is so eloquent and engaging You have a gift for connecting with your readers and making us feel understood
Prime biome nurtures beneficial gut bacteria, contributing to enhanced skin radiance and a more youthful glow.
https://fastfromindia.com/# top 10 pharmacies in india
online pharmacy india
Тут можно преобрести seo продвижение медицинских клиник продвижение сайтов медицинской тематики
indian pharmacy: Fast From India – Fast From India
Najboljse pocitnice hotel Zlatni bor Zabljak! Uzivajte v udobju, svezem zraku in osupljivi pokrajini. Gorske poti, smucanje, izleti in prijetno vzdusje. Brezplacen Wi-Fi, zajtrk in parkirisce. Rezervirajte bivanje v osrcju narave!
Dobrodosli v Kolasin Swissotel! Uzivajte v udobnih sobah, osupljivem razgledu in odlicni storitvi. Pozimi – smucanje, poleti – pohodi v gore in izleti. Prirocna lokacija, restavracija, SPA in prijetno vzdusje. Rezervirajte nepozabne pocitnice!
Хотите сдать радиолом https://radiolom99.ru? Мы принимаем микросхемы, платы, процессоры и прочие радиоэлементы по выгодным ценам. Быстрая оценка, честные цены и удобные способы приема. Узнайте, сколько стоят ваши детали прямо сейчас!
darkmarket 2025 dark markets
Unlock your vehicle’s potential with our top-notch auto tuning services! Unleash your ride into a stunning masterpiece with our expert team. We specialize in customizations that cater to your unique style. Our high-quality solutions ensure optimal performance and stylish look . Don’t settle for average; elevate your driving experience and turn heads on the road! Visit us at https://accurateautobodyrepair.com/ today and take the first step towards your dream car!
https://fastfromindia.com/# Fast From India
Fast From India
Fast From India: Fast From India – Fast From India
Fast From India: Fast From India – pharmacy website india
娛樂城,通常指的是一個線上賭博平台,提供各種娛樂遊戲,如賭場遊戲、體育博彩、電子遊戲等。這些平台讓玩家可以在網路上進行賭博,而不需要親自前往實體賭場。娛樂城通常包含了各式各樣的遊戲選項,例如百家樂、輪盤、老虎機、撲克等,並且透過即時娛樂、直播等技術,提升了玩家的沉浸感和互動性。現今的娛樂城大多數已經支援手機和桌面端的多平台操作,讓玩家可以隨時隨地參與遊戲,這樣的便利性使得它們受到全球玩家的青睞。此外,娛樂城也會推出不同的優惠活動、註冊獎金和忠誠計劃,吸引新用戶並保持老用戶的活躍度。然而,娛樂城的風險也不可忽視。由於賭博本身具有高度的娛樂性,但也存在可能的成癮問題。多數國家對於線上賭博有著嚴格的法律規範,玩家在選擇娛樂城平台時,應該格外留意平台的合法性和安全性,以避免陷入詐騙或遭遇其他法律風險。因此,理性投注並了解相關法律是每位玩家應該保持的基本態度。
https://fastfromindia.shop/# top 10 online pharmacy in india
best india pharmacy
top online pharmacy india: Fast From India – pharmacy website india
Fast From India: Fast From India – Fast From India
Купите теплицу https://tepl1.ru/catalog с доставкой по выгодной цене! Широкий выбор моделей: поликарбонатные, стеклянные, пленочные. Быстрая доставка, прочные конструкции, удобный монтаж. Идеально для дачи, сада и фермерства. Заказывайте качественные теплицы с доставкой прямо сейчас!
Fast From India Fast From India Fast From India
indian pharmacy paypal
https://fastfromindia.com/# buy medicines online in india
Fast From India
buy medicines online in india: п»їlegitimate online pharmacies india – Fast From India
http://fastfromindia.com/# reputable indian pharmacies
indian pharmacies safe
Let’s spread the love! Tag a friend who would appreciate this post as much as you did.
This blog post is worth the read – trust us!
Fast From India: Fast From India – Fast From India
Thank you for addressing such an important topic in this post Your words are powerful and have the potential to make a real difference in the world
This blog is like a breath of fresh air in the midst of all the negativity on the internet I’m grateful to have stumbled upon it
From the bottom of my heart, thank you for being a source of positivity and light in this sometimes dark and overwhelming world
Your posts always leave me feeling motivated and empowered You have a gift for inspiring others and it’s evident in your writing
As someone who struggles with mental health, I appreciate the support and empathy displayed in your blog It means a lot to know I’m not alone
Your passion for what you do is evident in every post It’s inspiring to see someone truly fulfilling their purpose and making a positive impact
pharmacie en ligne: pharmacie en ligne sans ordonnance – Pharma Internationale
I love how your posts are both informative and entertaining You have a talent for making even the most mundane topics interesting
Тут можно преобрести seo продвижение медицинских клиник продвижение медицинских сайтов
Pharma Internationale: vente de mГ©dicament en ligne – Pharma Internationale
Тут можно преобрести сео продвижение медицинских сайтов продвижение медицинских услуг
Современные методы по бизнесу: https://student.uog.edu.et/hello-world-3/
pharmacie en ligne livraison europe: acheter mГ©dicament en ligne sans ordonnance – pharmacies en ligne certifiГ©es
https://pharmainternationale.com/# pharmacie en ligne france livraison internationale
Pharma Internationale
Prime biome nurtures beneficial gut bacteria, contributing to enhanced skin radiance and a more youthful glow.
Pharma Internationale: pharmacie en ligne avec ordonnance – Pharma Internationale
Sans?n?z? Sweet Bonanza’da sweet-bonanza-casino.site deneyin – parlak ve karl? bir slot! Ucretsiz donusler, kazanc carpanlar?, kademeli kombinasyonlar ve buyuk odemeler. Ucretsiz veya parayla cevrimici oynay?n ve tatl? oduller kazan?n!
Glory Casino’da glory-casino-guncel-giris.online oynayn – en iyi oyunlar, yuksek odemeler ve 7/24 destek! Populer slotlar?, kart oyunlar?n? ve ruleti secin, bonuslar kazan ve gercek para kazan?n!
Diego Armando Maradona https://diego-maradona.com.mx es una leyenda del futbol mundial! Campeon del Mundo de 1986, autor de “La Mano de Dios” y “El Gol del Siglo”. Un gran jugador argentino que inspiro a generaciones. ?Su tecnica, su regate y su pasion por el juego lo convirtieron en un icono del futbol!
Лучшие https://aacsatlanta.com/dui-school-marietta/ инструменты для работы с бизнесом.
Your comment enriches the conversation with thoughtful points. Well done!DFDC
pharmacie en ligne fiable: vente de mГ©dicament en ligne – Pharma Internationale
Fansite de Mike Tyson mike-tyson.com.mx/ donde podras conocer su historia, peleas, noticias y todo lo relacionado a su legado boxistico. Sigue sus proyectos y conoce mas sobre esta leyenda.
Sitio de fans de Michael Phelps michael-phelps.com.mx/ Un lugar donde los fanaticos pueden encontrar toda la informacion sobre su carrera, sus records y su vida. Noticias, logros y contenido exclusivo.
Sitio de fans de Muhammad Ali muhammad-ali La historia de una leyenda del boxeo, sus victorias, su lucha por sus derechos y su legado que inspiro al mundo.
Sitio fan de George Foreman george-foreman.com.mx/ dedicado a su carrera, victorias, derrotas y legado en el boxeo. Historias inspiradoras y el estilo unico de una leyenda del deporte.
Как сэкономить на бизнесе: https://karoen.nl/blog/2023/06/06/ontspan-en-geniet-een-gids-voor-de-perfecte-vakantie/
http://pharmainternationale.com/# Pharma Internationale
Pharma Internationale
Pharmacie en ligne livraison Europe: acheter mГ©dicament en ligne sans ordonnance – Pharma Internationale
https://nettyfish.com/bulk-sms-service-in-chennai/ Подробное руководство по бизнесу.
pharmacie en ligne avec ordonnance: Pharma Internationale – pharmacie en ligne livraison europe
Hello, I like the content of your site very much. I will visit again and evaluate your content.
автомобиль прокат авто аренда премиум авто в сочи
Играйте в Big Bamboo big-bamboo-slot.online слот с захватывающим геймплеем, фриспинами и множителями! Ощутите атмосферу восточной удачи, собирайте бонусные символы и выигрывайте по-крупному.
Join Glory Casino glory-casino-bd.online and get maximum bonuses! Top slot machines, table games, jackpots and exclusive promotions. Play online and win comfortably!
https://farmaciamedic.com/# Farmacia Medic
farmacia online madrid
Farmacia Medic: farmacia online envГo gratis – farmacia online 24 horas
farmacias direct: Farmacia Medic – Farmacia Medic
Взрослый вебкам бесплатно https://hotcams.one Тысячи моделей, приватные шоу, видео в высоком качестве и горячие трансляции. Общайтесь в чате и наслаждайтесь без ограничений!
娛樂城,通常指的是一個線上賭博平台,提供各種娛樂遊戲,如賭場遊戲、體育博彩、電子遊戲等。這些平台讓玩家可以在網路上進行賭博,而不需要親自前往實體賭場。娛樂城通常包含了各式各樣的遊戲選項,例如百家樂、輪盤、老虎機、撲克等,並且透過即時娛樂、直播等技術,提升了玩家的沉浸感和互動性。現今的娛樂城大多數已經支援手機和桌面端的多平台操作,讓玩家可以隨時隨地參與遊戲,這樣的便利性使得它們受到全球玩家的青睞。此外,娛樂城也會推出不同的優惠活動、註冊獎金和忠誠計劃,吸引新用戶並保持老用戶的活躍度。然而,娛樂城的風險也不可忽視。由於賭博本身具有高度的娛樂性,但也存在可能的成癮問題。多數國家對於線上賭博有著嚴格的法律規範,玩家在選擇娛樂城平台時,應該格外留意平台的合法性和安全性,以避免陷入詐騙或遭遇其他法律風險。因此,理性投注並了解相關法律是每位玩家應該保持的基本態度。
Новые подходы в бизнесе: https://www.editions-ric.fr/2019/02/10/video-france-3-reportage-sur-patrick-lecointe-editions-ric/
https://farmaciamedic.com/# farmacias online baratas
Farmacia Medic
аренда машины в симферополе на жд вокзале аренда машины сочи
Farmacia Medic: farmacia online envГo gratis – Farmacia Medic
Farmacia Medic: farmacia en casa online descuento – Farmacia Medic
Какие изменения в бизнесе? https://www.tandem.edu.co/grados-2022-1/
https://farmaciamedic.com/# farmacias online seguras
Farmacia Medic
Farmacia Medic: Farmacia Medic – Farmacia Medic
Farmacia Medic: farmacia barata – Farmacia Medic
Какой https://www.tandem.edu.co/halloween/ вариант предпочесть в бизнесе?
Experience the fusion of skill and technology at Life Auto Body. We specialize in modifying your vehicle into a unique gem . Our skilled team provides exceptional auto tuning solutions . Feel the joy of driving a perfectly tuned car fashioned to your taste. Visit us at https://lifeautobody.com/ and start your car’s metamorphosis journey with us!
https://farmaciamedic.com/# Farmacia Medic
Farmacia Medic
Сравнительный анализ бизнеса: https://www.tandem.edu.co/presentacion-the-space/
farmacias online seguras en espaГ±a: Farmacia Medic – Farmacia Medic
This blog post is worth the read – trust us!
Your writing has a way of resonating with me and making me feel understood Thank you for being a relatable and authentic voice
Good day! Do you use Twitter? I’d like to follow you if that would be ok.
I’m absolutely enjoying your blog.
wps 官网
Thank you for sharing this information. I really enjoyed your blog post. You have indeed shared an informative and interesting blog post with people.
wps 官网
It’s in reality a great and helpful piece of information. I’m happy that you simply shared this useful information with us.
anydesk 官网
It’s in reality a great and helpful piece of information. I’m happy that you simply shared this useful information with us
anydesk 下载
you’re in point of fact a just right webmaster. The website loading velocity is amazing. It sort of feels that you are doing any distinctive trick.
WhatsApp网页版
I have recommended your blog to all of my friends and family Your words have the power to change lives and I want others to experience that as well
The positivity and optimism conveyed in this blog never fails to uplift my spirits Thank you for spreading joy and positivity in the world
Your writing style is so engaging and makes even the most mundane topics interesting to read Keep up the fantastic work
Love this appreciation for great content
автомобиль прокат авто аренда авто в кумлудже
Your writing is so inspiring and motivating I always leave your blog feeling more determined and resilient
Your writing is so refreshing and authentic It’s like having a conversation with a good friend Thank you for opening up and sharing your heart with us
nitric boost is a nutritional supplement that supports enhanced sexual performance and general wellness.
Практические советы для https://mejorsintlc.cl/litio-e-hidrogeno-verde-en-la-maleta-del-presidente-boric/ работы с бизнесом.
http://farmaciamedic.com/# Farmacia Medic
Farmacia Medic
acquistare farmaci senza ricetta: Top Max Farma – Top Max Farma
регистрация РиоБет официальный сайт RioBet Casino
farmacia online senza ricetta: Farmacia online miglior prezzo – farmacia online senza ricetta
Хочу понять в https://epiczo.com/?p=254 бизнесе. Куда зайти?
Займы онлайн без проверок займы онлайн на карту без проверок срочно
Как взять займ займ онлайн бесплатно
https://topmaxfarma.com/# Top Max Farma
Top Max Farma
прокачка автомобиля https://avtoplastics.ru
nitric boost is a nutritional supplement that supports enhanced sexual performance and general wellness.
Top Max Farma: Top Max Farma – Top Max Farma
Top Max Farma: farmacie online affidabili – Top Max Farma
prirodni biser Durmitor park Jedinstveni planinski pejzazi, bistra jezera, kanjoni i guste sume. Idealno mjesto za planinarenje, rafting, skijanje i rekreaciju na otvorenom. Otkrijte nacionalni park pod zastitom UNESCO-a!
casinos online nuevos nuevoscasinosonlineespana.com
https://dmpublicidad.com.ar/974-2/ Пример из практики: Бизнес.
https://topmaxfarma.shop/# top farmacia online
Top Max Farma
farmacia online piГ№ conveniente: Top Max Farma – migliori farmacie online 2024
Где смотреть статистику о бизнесе? https://shop.platinumwellness.net/hello-world/
https://topmaxfarma.com/# farmaci senza ricetta elenco
Farmacie on line spedizione gratuita
Top Max Farma: acquisto farmaci con ricetta – Top Max Farma
everything about the world t.me/ufc_ar/ of UFC in Arabic! Latest news, tournament schedules, fighter ratings and exclusive analytical materials. Follow the best fights and stay up to date with all the events in the world of mixed martial arts!
Пытаюсь разобраться в http://vitanuova.ru/u-severnoj-korei-est-svoj-planshet/ бизнесе. Что посоветуете?
аренда авто в турции аренда авто адлер без водителя
Top Max Farma: Farmacia online piГ№ conveniente – Top Max Farma
Лучшие инструменты для работы с бизнесом: http://www.pureatz.com/recipes/penne-with-shrimp-and-asparagus/
Рейтинг казино мобильное Рейтинг казино 2025 с бонусами
аренда авто в эрдемли аренда авто в эрдемли
https://canadianpharmacyaapd.shop/# canada online pharmacy
online shopping pharmacy india
http://mexicanpharmacyacp.com/# mexican pharmacy acp
mexican rx online
Авторитетное мнение о бизнесе: https://mattaarquitectos.es/portfolio/avenida-reina-victoria-8-madrid/main-31/
Best online Indian pharmacy: IndianPharmacyAbp – Indian pharmacy international shipping
mexico pharmacies prescription drugs: reputable mexican pharmacies online – mexican mail order pharmacies
Как продвигать сайт успешно, изучите.
Секреты успешного продвижения сайтов, проводите.
Пошаговое руководство по SEO, прибыль.
Инновационные методы продвижения сайтов, которые изменят ваш бизнес.
Углубляемся в продвижение сайтов, доступные каждому.
Актуальные стратегии SEO, которые вы должны использовать.
Лучшие агентства по SEO, которые заслуживают внимания.
14 ошибок при продвижении сайтов, чтобы не потерять трафик.
Доступные методы SEO, на практике.
Лучшие онлайн-сервисы для SEO, что упростят вашу работу.
Показатели успешного SEO, на которые стоит обратить внимание.
Как контент влияет на трафик, что имеет значение.
Успех в локальном SEO, стратегии, которые работают.
Психология пользователей и SEO, которые помогут улучшить результаты.
Мобильное SEO: продвигайте сайт на устройствах, учитывайте это в стратегиях.
Как выбрать метод продвижения, определите свою цель.
Как наращивать ссылочную массу, учтите это в стратегии.
Ежегодные тренды в SEO, не пропустите.
Сила SMM в SEO, вовлекайте пользователей.
Как правильно оптимизировать, необходимые для успеха.
цена сайта цена сайта .
Играйте в Mostbet Casino mostbet лицензированное онлайн-казино с огромным выбором игр! Получайте бонусы, выигрывайте в лучших слотах и наслаждайтесь быстрыми выплатами. Удобные способы пополнения счета!
Выбираем недвижимость в Киеве https://automat.kiev.ua как оценить район, новостройки и вторичный рынок? Анализ цен, проверка застройщика, юридическая безопасность сделки. Полезные советы для покупки квартиры без ошибок и переплат!
Строительный онлайн журнал https://kero.com.ua ваш источник актуальной информации о строительстве и ремонте! Советы, обзоры материалов, технологии, тренды и новости отрасли. Узнайте о современных методах строительства, инженерных решениях и дизайне интерьера!
Подкаст о https://schule-am-volkspark.de/plusminus-umfrage бизнесе.
http://mexicanpharmacyacp.com/# mexico drug stores pharmacies
buying from online mexican pharmacy
safe reliable canadian pharmacy: pharmacy canadian superstore – canadian pharmacy phone number
https://mexicanpharmacyacp.shop/# medication from mexico pharmacy
india online pharmacy
mexican pharmacy acp: mexican pharmaceuticals online – buying prescription drugs in mexico online
Как не сдаться при изучении бизнеса: https://aroagardenbar.com.br/hello-world-2/
mexican pharmacy acp: mexican pharmacy acp – mexican pharmacy acp
mexico drug stores pharmacies: mexican pharmacy acp – best online pharmacies in mexico
https://canadianpharmacyaapd.com/# canadian pharmacy drugs online
Online medicine order
Всё для мужчин https://kompanion.com.ua в одном месте! Спорт, мода, авто, гаджеты, здоровье и лайфхаки. Читай полезные советы, следи за трендами и будь лучшей версией себя.
Все автомобильные новости https://nmiu.org.ua в одном месте! Новые модели, обзоры, сравнения, тест-драйвы, технологии и автоиндустрия. Следите за тенденциями и оставайтесь в курсе событий автопрома!
mexican pharmacy acp mexican pharmacy acp mexican border pharmacies shipping to usa
Что лучше выбрать в бизнесе? https://kubalitours.com/family-friendly-resorts-in-coastal-kenya/
Актуальные новости бизнеса https://rentwell.in.ua экономики и недвижимости! Аналитика, тренды, инвестиции, рынок недвижимости и финансовые прогнозы. Будьте в курсе главных событий и принимайте взвешенные решения!
Выбор недвижимости в Киеве https://odinden.com.ua на что обратить внимание? Анализ районов, проверка застройщиков, сравнение цен на новостройки и вторичное жилье.
Лучший женский портал https://rosetti.com.ua Стиль, красота, здоровье, семья, карьера и саморазвитие. Узнавайте о новых трендах, читайте полезные советы и вдохновляйтесь идеями для счастливой жизни!
https://canadianpharmacyaapd.com/# canadian pharmacy online
mexican online pharmacies prescription drugs
canadian pharmacy: pharmacies in canada that ship to the us – canadianpharmacyworld com
Современный женский портал https://womanlife.kyiv.ua мода, стиль, красота, здоровье, отношения и карьера. Читайте актуальные статьи, находите полезные советы и вдохновляйтесь на новые достижения!
Все для женщин https://timelady.kyiv.ua в одном месте! Новости моды, бьюти-советы, отношения, карьера, психология и лайфхаки. Читайте статьи, находите вдохновение и будьте уверены в себе каждый день!
Детский портал о здоровье https://run.org.ua полезная информация для заботливых родителей! Советы педиатров, питание, развитие, вакцинация, профилактика болезней и здоровый образ жизни. Всё, что нужно знать о здоровье вашего ребенка!
great blog very nice articles I will follow you continuously sohbet odaları
great blog very nice articles I will follow you continuously sohbet odaları
moving from toronto to victoria movers toronto
Всё для женщин https://allwoman.kyiv.ua в одном месте! Советы по стилю, уходу за собой, психологии, семье, карьере и саморазвитию. Узнавайте о новинках моды, секретах успешных женщин и будьте на шаг впереди!
Современный женский сайт https://dama.kyiv.ua красота, стиль, здоровье, семья и карьера. Читайте актуальные статьи, находите полезные советы и вдохновляйтесь на новые достижения!
https://mexicanpharmacyacp.shop/# mexican pharmacy acp
mexican mail order pharmacies
Что нельзя делать с бизнесом? https://seointellect.com/2023/04/09/boost-your-online-presence-our-top-digital-marketing/
Женский онлайн-журнал https://krasotka.kyiv.ua мода, красота, здоровье, семья и карьера. Полезные статьи, тренды, лайфхаки и вдохновение для современной женщины. Читайте, развивайтесь и наслаждайтесь жизнью!
Лучший сайт для женщин https://model.kyiv.ua секреты красоты, стильные образы, отношения, карьера, лайфхаки и вдохновение. Оставайтесь в курсе трендов, читайте экспертные советы и развивайтесь вместе с нами!
Онлайн-журнал для женщин https://otnoshenia.net которые стремятся к лучшему! Советы по стилю и макияжу, секреты счастливых отношений, здоровое питание, психология и идеи для отдыха.
buying prescription drugs in mexico online: mexican pharmacy acp – reputable mexican pharmacies online
indian pharmacy: Indian Pharmacy Abp – Indian pharmacy online
Сайт для современных женщин https://princess.kyiv.ua Все о последних трендах в мире моды и красоты, секреты здоровья, психология, советы по саморазвитию, карьере и личным отношениям.
Портал для женщин https://woman365.kyiv.ua которые ценят красоту и уверенность! Новинки моды, макияж, секреты счастья, психология, карьера и вдохновение. Узнавайте полезные советы и воплощайте мечты в реальность!
Женский онлайн-клуб https://womanclub.kyiv.ua для тех, кто ценит стиль, здоровье и успех! Узнайте секреты красоты, тренды моды, советы по отношениям и карьере. Читайте вдохновляющие истории, пробуйте новые лайфхаки и развивайтесь каждый день!
Видел прогнозы, что Бизнес будет главным https://www.aquilamanagement.eu/faq-items/class-aptent-taciti-sociosqu-ad-litora-torquent-per-conubia-nostra-pers/ трендом. Возражения?
CS:GO/CS2 skins wiki.vpesports.com catalog with full description! Check out rare, legendary and popular skins, their cost, collections and features. Find the perfect skin for your inventory!
The best online marketplace https://m1bar.com/user/vidawindham/! Buy and sell game, social, business and other accounts. Convenient filtering system, transaction security and current offers. All popular services and games in one place!
Buy verified accounts buy accounts with ease! Gaming, business, and social media accounts available at competitive prices. Fast transactions, trusted sellers, and secure payments. Get the best deals now!
https://indianpharmacyabp.com/# Indian Pharmacy Abp
buying prescription drugs in mexico
medication from mexico pharmacy: best online pharmacies in mexico – mexican rx online
Давайте обсудим о бизнесе: https://regonequipments.com/2020/01/06/hello-world/.
Сайт для женщин https://womanexpert.kyiv.ua которые хотят быть успешными и счастливыми! Советы по красоте, здоровью, воспитанию детей, карьере и личностному росту. Актуальные тренды, лайфхаки и вдохновение для современных женщин!
Лучший автомобильный портал https://kia-sportage.in.ua Обзоры автомобилей, сравнения, новинки, тест-драйвы, лайфхаки для водителей и советы по выбору авто. Всё, что нужно автолюбителям и профессионалам!
Портал для автолюбителей https://lada.kharkiv.ua всё об автомобилях! Автообзоры, рейтинг лучших моделей, новинки, цены, советы по уходу и эксплуатации. Узнайте, какие авто заслуживают вашего внимания!
https://mexicanpharmacyacp.shop/# mexican pharmacy acp
mexican drugstore online
Best Indian pharmacy: Best Indian pharmacy – India pharmacy ship to USA
Лично мне помог этот ресурс по бизнесу: https://kelidsazan.com/%da%a9%d9%84%db%8c%d8%af%d8%b3%d8%a7%d8%b2-%d8%a7%d8%b4%d8%b1%d9%81%db%8c-%d8%a7%d8%b5%d9%81%d9%87%d8%a7%d9%86%db%8c/
Indian pharmacy international shipping: Best Indian pharmacy – Indian Pharmacy Abp
Сайт для женщин https://womanportal.kyiv.ua всё о моде, красоте, здоровье, отношениях и саморазвитии! Полезные советы, тренды, лайфхаки и вдохновение для современной женщины. Будьте стильной, уверенной и успешной!
Автомобильный сайт https://newsgood.com.ua для водителей и автолюбителей! Узнавайте актуальные новости, читайте обзоры новых моделей, изучайте советы по обслуживанию и вождению.
Авто портал для всех https://rupsbigbear.com кто любит автомобили! Новости, тест-драйвы, характеристики, тюнинг, страхование, покупка и продажа авто. Следите за последними тенденциями и выбирайте лучшее для себя!
Инфографика по бизнесу: http://inetlog.ru/
India pharmacy ship to USA: Best online Indian pharmacy – Best Indian pharmacy
canadianpharmacy com: Canadian Pharmacy AAPD – canadian pharmacy com
IndianPharmacyAbp: Online medicine home delivery – India pharmacy ship to USA
India pharmacy ship to USA India pharmacy ship to USA Indian pharmacy international shipping
Лучший женский онлайн-журнал https://sweetheart.kyiv.ua Всё о моде, красоте, здоровье, отношениях и успехе. Экспертные советы, лайфхаки и мотивация для уверенных в себе женщин.
Женский журнал онлайн https://sunshadow.com.ua стиль, уход, секреты красоты, семья, карьера и саморазвитие. Будьте в курсе трендов, находите полезные лайфхаки и вдохновляйтесь на новые достижения!
Ваш гид в мире красоты https://wonderwoman.kyiv.ua моды и саморазвития! Экспертные статьи о здоровье, отношениях, карьере, психологии и лайфхаках для повседневной жизни. Оставайтесь в курсе трендов и открывайте новые возможности!
https://indianpharmacyabp.com/# top online pharmacy india
mexican rx online
Женский мир https://vsegladko.net без границ! Узнайте всё о моде, уходе за собой, фитнесе, психологии, карьере и хобби. Читайте актуальные статьи, следите за новыми тенденциями и наполняйте жизнь яркими моментами!
Автомобильный онлайн-журнал https://svobodomislie.com всё о мире авто! Свежие новости, обзоры моделей, тест-драйвы, автоспорт, технологии и лайфхаки для водителей. Следите за трендами и будьте в курсе последних событий автопрома!
Онлайн-журнал о машинах https://sw.org.ua всё, что нужно знать об автомобилях! Премьеры новых моделей, сравнение авто, автострахование, технологии, электрокары и советы для владельцев.
Лично мне помог этот ресурс по бизнесу: https://blog.12min.com/br/frases-marcantes-de-livros/
medicine in mexico pharmacies: mexican online pharmacies prescription drugs – buying prescription drugs in mexico
how to pay on alibaba using mobile money
Сайт о красоте и здоровье https://beautytips.kyiv.ua полезные советы, тренды ухода, секреты молодости, правильное питание и фитнес. Узнавайте, как оставаться красивой, здоровой и энергичной в любом возрасте!
Современный женский https://adviceskin.com журнал для тех, кто хочет быть стильной, уверенной и успешной! Секреты красоты, модные тенденции, здоровье, карьера, психология и лайфхаки для повседневной жизни.
Идеальный баланс стиля https://feromonia.com.ua красоты и здоровья! Читайте о модных тенденциях, косметике, правильном питании, спорте и психологическом комфорте. Найдите вдохновение для гармоничной жизни!
Мода, красота и здоровье https://gryada.org.ua ваш путь к идеальному образу! Последние тренды, советы по уходу, секреты стройности и здорового образа жизни. Создавайте гармонию в своём стиле и самочувствии!
Секреты идеального стиля https://ladyone.kyiv.ua молодости и здоровья! Советы по моде, косметике, уходу за кожей и волосами, фитнесу и сбалансированному питанию. Узнайте, как создать гармоничный образ и чувствовать себя великолепно!
https://inderjeet.co.uk/hello-world Где учиться бизнесу?
Online medicine home delivery: best online pharmacy india – Online medicine home delivery
Discover the expertise of auto tuning at Saratoga Auto Body, where your vehicle’s power is fully unleashed . Our dedicated team offers bespoke tuning options designed to improve your car’s appearance and output. Become a member of our satisfied clientele and drive a vehicle that truly represents your distinct taste. Visit https://saratogaautobody.com/ and begin your car’s enhancement today!
best canadian online pharmacy: 77 canadian pharmacy – canadian compounding pharmacy
mexican pharmacy acp mexican pharmaceuticals online mexican pharmacy acp
pharmacies in canada that ship to the us: canadian pharmacy meds review – canadian valley pharmacy
reputable mexican pharmacies online: mexican pharmacy acp – mexican pharmacy acp
Новые подходы https://constcourt.tj/en/2020/01/30/working-visit-to-new-york-city-21-09-2017/ в бизнесе.
Ваш гид по стилю https://magictech.com.ua красоте и жизни! Женский журнал о модных трендах, секретах молодости, психологии, карьере и личных отношениях.
Лучший женский журнал https://modam.com.ua онлайн! Мода, стиль, уход за собой, фитнес, кулинария, саморазвитие и лайфхаки. Полезные советы и вдохновение для современной женщины, которая стремится к лучшему!
aizen power is a huge scientific-breakthrough supplement that concentrates on improving your sexual life in a very safe and easy manner.
Все про остекление и ремонт балконов — новости, советы и услуги в одном месте!
Хотите преобразить свой балкон или лоджию?
Мы предлагаем свежие идеи, актуальные обзоры и экспертные мнения
по всем ключевым вопросам: современные тенденции в остеклении,
варианты дизайна и материалы для отделки.
Полезные рекомендации для тех, кто планирует обновление балкона:
как выбрать подходящий тип остекления — тёплое или холодное,
какие материалы использовать для утепления и отделки, а также
как избежать распространённых ошибок при монтаже.
Мы поможем вам разобраться в юридических аспектах согласования
перепланировок и остекления.
Следите за нашими обзорами новых технологий и материалов,
узнавайте о лучших предложениях на рынке, а также получайте советы
по уходу за окнами и балконными конструкциями.
Мы делимся рекомендациями по выбору надёжных подрядчиков,
рассказываем о преимуществах различных систем остекления и
предлагаем идеи по функциональному использованию пространства балкона.
Только актуальная информация от ведущих специалистов отрасли — проверенные факты,
практические советы и вдохновляющие примеры.
Подписывайтесь и оставайтесь в курсе последних тенденций!
С нами ваш балкон станет уютным и функциональным пространством,
радующим вас каждый день!
Сайт balconyokna.ru
Современный женский онлайн https://viplady.kyiv.ua журнал для тех, кто хочет большего! Всё о моде, косметике, фитнесе, питании, психологии, карьере и отношениях. Узнавайте новое, вдохновляйтесь и воплощайте мечты в реальность!
Ваш женский путеводитель https://topwoman.kyiv.ua по красоте, стилю и саморазвитию! Полезные советы, модные тенденции, лайфхаки по уходу за собой, психология, отношения и вдохновение.
Онлайн-журнал для женщин https://one-lady.com которые хотят быть стильными и успешными! Последние тренды, секреты красоты, уход за собой, здоровье, психология и карьера. Будьте в курсе новинок и наслаждайтесь жизнью!
Best online Indian pharmacy: India pharmacy ship to USA – Best online Indian pharmacy
From the bottom of my heart, thank you for being a source of positivity and light in this sometimes dark and overwhelming world
https://www.kaeshammer.ch/bouquets/ Нужны реальные кейсы по бизнесу.
indian pharmacy: Indian pharmacy international shipping – Best online Indian pharmacy
Портал для родителей https://rodkom.org.ua всё о воспитании, развитии и здоровье детей! Полезные советы, лайфхаки, педиатрические рекомендации, семейная психология и идеи для досуга. Растите счастливых и здоровых детей вместе с нами!
Автомобильный портал https://kakavto.com всё, что нужно знать о машинах! Новинки автопрома, технологии, электрокары, автоспорт, автострахование и советы по ремонту. Следите за трендами автоиндустрии!
Советы для родителей https://agusha.com.ua в одном месте! Развитие ребёнка, воспитание, здоровье, питание, семейные отношения и идеи для досуга. Полезные статьи, лайфхаки и экспертные мнения помогут вам в заботе о малыше!
how to screenshot on windows without print screen button
From the bottom of my heart, thank you for being a source of positivity and light in this sometimes dark and overwhelming world
Your blog always leaves me feeling uplifted and inspired Thank you for consistently delivering high-quality content
I couldn’t stop scrolling and reading, your content is truly one-of-a-kind. Thank you for all the time and effort you put into creating such amazing content.
Your ideas and insights are unique and thought-provoking I appreciate how you challenge your readers to see things from a different perspective
Leave a comment and let us know what your favorite blog post has been so far!
Let me know what type of content you’d like to see more of in the future!
Актуальные новости Украины https://vesti.in.ua политика, экономика, спорт, культура и общество! Оперативная информация, эксклюзивные материалы, репортажи и аналитика. Следите за событиями в режиме реального времени!
Главные новости дня https://mostmedia.com.ua политика, экономика, общество, спорт и культура! Оперативные события, аналитика, мнения экспертов и репортажи. Читайте актуальные новости Украины и мира в одном месте!
Медицинский онлайн-журнал https://medicalanswers.com.ua ваш личный консультант по здоровью! Полезные статьи, советы врачей, профилактика, диагностика, лечение и здоровый образ жизни.
Плюсы и https://cobsamex.net/inversion/educacion-garantizada/ минусы разных подходов к бизнесу.
Как устроен механизм финансов? https://allealavto.ru.
mexican pharmacy acp: buying prescription drugs in mexico online – mexican pharmacy acp
Сайт для женщин https://bbb.dp.ua всё о моде, красоте, здоровье, отношениях и саморазвитии! Читайте полезные советы, следите за трендами, вдохновляйтесь и наслаждайтесь гармоничной жизнью!
Indian Pharmacy Abp: Indian Pharmacy Abp – Online medicine home delivery
Juega sin limites! https://amargordediciones.com ofrecen altas cuotas, pagos rapidos y anonimato. ?Compara casas de apuestas populares, elige metodos de apuestas convenientes y disfruta de la emocion!
Apuestas deportivas https://www.baravaca.es plataformas con licencia, cuotas favorables, variedad de deportes y pagos rapidos. ?Consulta la valoracion de las mejores casas de apuestas y elige la tuya!
Dobite a preskumajte Bobotov Kuk weather a pocitite majestatnost hor! Najvyssi vrch Ciernej Hory (2523 m) ponuka ohromujuce panoramy, vzrusujuce trasy a nezabudnutelne emocie. Zistite najlepsie lezecke cesty a tipy na bezpecny vylet!
Otkrijte most Durdevica Tara – jedan od najlepsih mostova u Evropi! Jedinstvena gradevina iznad kanjona Tare zadivljuje svojom razmjerom i panoramskim pogledom. Najbolje rute, izleti i savjeti za putnike!
Kaufen Sie immobilien kaufen in montenegro – Ihr Zuhause am Meer oder in den Bergen! Tolle Angebote, Villen, Wohnungen und Apartments. Informieren Sie sich uber die besten Lagen, Preise, rechtlichen Feinheiten und Investitionsmoglichkeiten!
best canadian online pharmacy: Canadian Pharmacy AAPD – real canadian pharmacy
Мне самому помог этот https://glykas.com.gr/2017/09/27/highlights-from-hong-kongs-art-central/ ресурс по бизнесу.
Sakupon an Salog Tara https://www.tara-montenegro-rafting.me an pinakamarahay na pag-rafting sa Montenegro! Pag-raft sa saro sa pinakahararom na mga kanyon sa Europa, an pinakadalisay na tubig asin naturalesa kan Durmitor. An perpektong pakikipagsapalaran para sa mga mahilig sa luwas!
reputable mexican pharmacies online: mexican pharmacy acp – mexico pharmacies prescription drugs
Enjoy fun at Tara bridge extreme rafting, kayaking, boating and camping in picturesque places. The perfect place for active recreation and immersion in wild nature!
Успешные кейсы применения финансов: https://triumph-uk.ru
Хотите списать долги? банкротство в самаре помощь в сложных финансовых ситуациях. Освободитесь от кредитов, штрафов и задолженностей. Узнайте, как начать процедуру прямо сейчас!
aqua sculpt is a cutting-edge dietary supplement crafted to support your weight management journey by optimizing mitochondrial performance and enhancing metabolic processes.
mexican pharmacy acp buying prescription drugs in mexico online п»їbest mexican online pharmacies
Мнение специалистов о бизнесе: https://mueenahmed.com/?p=4
indian pharmacy: Online medicine home delivery – India pharmacy ship to USA
purple pharmacy mexico price list: medication from mexico pharmacy – mexican online pharmacies prescription drugs
Приветствую. https://activefond.ru Подскажите, где посмотреть информацию о финансах?
История становления https://www.peretyazhka-mebeli-v-novosibirske-154.ru/ бизнеса.
Пример из https://cm-rf.ru практики: Финансы.
ТОП-10 ресурсов по финансам: https://centrdeklaraciy22.ru
appliance movers toronto moving companies toronto prices
Казино предлагает отличные условия для РёРіСЂС‹.: balloon игра – balloon game
Рграйте СЃ СѓРјРѕРј, РЅРѕ РЅРµ забывайте Рѕ веселье.: balloon казино демо – balloon казино демо
Статьи о ремонте и строительстве https://tvin270584.livejournal.com советы, инструкции и лайфхаки! Узнайте, как выбрать материалы, спланировать бюджет, сделать ремонт своими руками и избежать ошибок при строительстве.
Ремонт и сантехника https://santekhnik-moskva.blogspot.com пошаговые инструкции, выбор материалов, монтаж систем водоснабжения и отопления, устранение протечек и установка сантехнических приборов. Советы экспертов для качественного ремонта!
balloon игра на деньги balloon казино официальный сайт Ballon — автомат СЃ захватывающим сюжетом.
https://akhbutina.kz/# Рграйте РЅР° деньги Рё получайте удовольствиe.
Сыграйте РЅР° деньги, почувствуйте азарт!: balloon игра – balloon казино
Нужна машина в прокат? сколько стоит аренда машины в турции быстро, выгодно и без лишних забот! Машины всех классов, удобные условия аренды, страховка и гибкие тарифы. Забронируйте авто в несколько кликов!
cocaine esports news cocaine
Ready-made custom works buying-papers-online.com fast, high-quality and inexpensive! We will help with abstracts, term papers, diplomas, essays and other academic assignments. Guaranteed originality, deadlines and 24/7 support!
РРіСЂР° РЅР° деньги — это ваше развлечение.: balloon казино демо – balloon казино
Ballon — идеальный выбор для азартных РёРіСЂРѕРєРѕРІ.: balloon game – balloon казино
bing porn child
Нужен качественный бетон? https://beton-moscvich.ru/tovarnii-beton/ быстро, надёжно и по выгодной цене! Прямые поставки от производителя, различные марки, точное соблюдение сроков. Оперативная доставка на стройплощадки, заказ онлайн или по телефону!
кейсы кс го 2 https://cs-go.ru
1Win Brasil 1winbr.com/ apostas esportivas e cassino online! Altas odds, bonus generosos e ampla variedade de jogos. Aposte em esportes, jogue no cassino e aproveite as melhores promocoes agora mesmo!
Рграйте РїРѕ СЃРІРѕРёРј правилам РЅР° автомате.: balloon казино играть – balloon казино официальный сайт
Казино — РјРёСЂ азартных приключений.: balloon казино – balloon казино официальный сайт
I have been struggling with this issue for a while and your post has provided me with much-needed guidance and clarity Thank you so much
balloon казино демо balloon казино демо Найдите СЃРІРѕР№ lucky slot РІ казино.
Sports betting with 1xbetapp br! Huge selection of matches, live bets, generous bonuses and lightning-fast payouts. Play casino, eSports and win at any time!
Welcome to Winbet Casino winbetaz.biz/ a place where luck is on your side! Huge selection of games, bonuses for new players and instant payouts. Try your luck right now!
You have a way of explaining complex topics in a straightforward and easy to understand manner Your posts are always a pleasure to read
Your words have the power to change lives and I am grateful for the positive impact you have had on mine Thank you
Крути барабаны Рё жди победы!: balloon казино – balloon game
Your content always manages to captivate and educate me. Keep up the fantastic work!
Thank you for addressing such an important topic in this post Your words are powerful and have the potential to make a real difference in the world
Your writing style is so engaging and easy to follow I find myself reading through each post without even realizing I’ve reached the end
I want to express my appreciation for the writer of this blog post. It’s clear they put a lot of effort and thought into their work, and it shows. From the informative content to the engaging writing style, I thoroughly enjoyed reading it.
https://akhbutina.kz/# РРіСЂР° РЅР° деньги — это ваше развлечение.
crazy monkey online https://crazymonkeygame.com/
maximum winnings with http://www.onewinwin.in! Bet on sports, play in the casino, participate in promotions and tournaments. Convenient payments, fast payouts and a welcome bonus for beginners. Join 1win and collect your winnings!
Ргровые автоматы — шанс РЅР° крупный выигрыш.: balloon game – balloon казино играть
Ballon радует РёРіСЂРѕРєРѕРІ разнообразием функций.: balloon игра на деньги – balloon игра
gambling without limits http://www.one-1win.in wide selection of games, high odds, fast payouts and exclusive bonuses. Try your luck in the casino and on bets. Play, win and earn with 1win!
your game, your rules http://www.winbkaz.biz Sports, eSports, casino, poker and slots – choose and win! Convenient account replenishment, instant withdrawals and cool promotions for new players. Join now!
https://balloonigra.kz/# Автоматы Ballon поднимают настроение каждому.
Рграйте Рё выигрывайте РЅР° автомате Ballon!: balloon казино играть – balloon игра на деньги
Ballon радует РёРіСЂРѕРєРѕРІ разнообразием функций.: balloon игра на деньги – balloon игра на деньги
https://neokomsomol.kz/# Ргровые автоматы Ballon ждут СЃРІРѕРёС… героев.
Хотите получить https://10eurosgratissindepositocasinoespana.com начни игру без риска – Открой для себя захватывающие слоты, живое казино и эксклюзивные бонусы. Играй с комфортом, наслаждайся топовыми играми и выигрывай!
Mostbet Uzbekistan mostbetuzbekistan apk offers you profitable bets, top odds and instant payouts. Make sports predictions, play online casino and enjoy the excitement with registration bonuses!
Ballon радует РёРіСЂРѕРєРѕРІ разнообразием функций.: balloon казино официальный сайт – balloon казино играть
balloon game balloon игра на деньги Рграйте СЃ СѓРјРѕРј, РЅРѕ РЅРµ забывайте Рѕ веселье.
Azure Storage Explorer https://github.com/azure-docs/Azure-Storage-Explorer/releases is a convenient tool for managing data in the Azure cloud. Work with Blob, Table, Queue and File Storage through an intuitive interface.
Магазин печей и каминов http://www.pech.pro широкий выбор дровяных, газовых и электрических моделей. Стильные решения для дома, дачи и бани. Быстрая доставка, установка и гарантия качества!
porn ufc cocaine
bing porn child
https://balloonigra.kz/# Погрузитесь в мир азартных игр.
Рграйте РІ Ballon Рё наслаждайтесь процессом.: balloon казино официальный сайт – balloon игра
Магазин печей и каминов https://pech.pro широкий выбор дровяных, газовых и электрических моделей. Стильные решения для дома, дачи и бани. Быстрая доставка, установка и гарантия качества!
Каждый СЃРїРёРЅ может стать выигрышным!: balloon игра – balloon казино
Рграйте РїРѕ СЃРІРѕРёРј правилам РЅР° автомате.: balloon казино – balloon казино демо
купить септик для частного дома https://ustanovka-septika-spb.ru
戰神賽特
「戰神賽特」— 2025年最火爆的老虎機,等你來挑戰!
如果你正在尋找一款高賠率、刺激又充滿神秘感的老虎機遊戲,那麼「戰神賽特」絕對是你的最佳選擇!這款由RG電子精心打造的遊戲,以古埃及戰神賽特為主題,結合精美畫面與震撼音效,帶你進入神秘的沙漠世界,感受無與倫比的刺激體驗。
為何玩家瘋狂愛上戰神賽特?
超狂賠率 51,000 倍:一轉瞬間,財富翻倍不是夢
高RTP達96.89%:更高勝率,更多機會贏得大獎
獨特遊戲機制:掉落消除+獎金購買,玩法多樣更刺激
極致視聽享受:古埃及風格設計+震撼音效,讓你完全沉浸其中
無論你是老虎機高手還是新手玩家,「戰神賽特」都能帶給你前所未有的遊戲體驗!快來挑戰戰神,贏取屬於你的豐厚獎勵!
cocaine esports terrorist attack
https://akhbutina.kz/# Рграйте РїРѕ СЃРІРѕРёРј правилам РЅР° автомате.
gay esports terrorist attack
кайт хургада
porn esports cocaine
terrorist attack esports heroin
balloon game balloon казино официальный сайт Рграйте РІ Ballon Рё наслаждайтесь процессом.
Рграйте РІ казино, наслаждайтесь каждым моментом.: balloon игра на деньги – balloon казино
Новый BMW X6: стиль и мощь, совершенного кроссовера.
BMW X6: динамика и комфорт, безусловно.
Исследуйте.
Стильный и агрессивный BMW X6, поклонников.
Как BMW X6 меняет правила игры, характеристики.
Кроссовер BMW X6, который стоит выбрать, в стиль.
Роскошь внутри BMW X6, исключительное качество.
BMW X6: идеальный автомобиль для путешествий, удовлетворение.
Причины популярности BMW X6, в нашем обзоре.
Спортивный характер BMW X6, всех.
Как BMW X6 заботится о вашей безопасности, в приоритете.
Почему BMW X6 – это лучшее решение, новые возможности.
Эффективные технологии в BMW X6, улучшают.
Исключительный комфорт BMW X6, изучите.
Чем BMW X6 превосходит другие кроссоверы?, в нашем анализе.
BMW X6: стиль, который невозможно не заметить, сделает вас заметным.
BMW X6 против других SUV, в нашем сравнении.
Что говорят владельцы о BMW X6?, в нашем обзоре.
Как BMW X6 обеспечивает безопасность, позаботятся о вас.
Заключение: стоит ли покупать BMW X6?, обобщаем мнение.
bmw x6 2019 bmw x6 2019 .
Динамичная РёРіСЂР° РЅР° автомате Ballon ждет вас.: balloon казино – balloon казино демо
https://akhbutina.kz/# Крути барабаны и жди победы!
Your writing is so genuine and heartfelt It’s refreshing to read a blog that is not trying to sell something or promote an agenda
Your writing is so engaging and easy to read It makes it a pleasure to visit your blog and learn from your insights and experiences
Your posts always speak to me on a personal level and I believe that is a testament to your authenticity and genuine nature
Your blog post had me hooked from the very beginning!
Модельный ряд BMW: откройте для себя новые возможности, удовлетворят любые потребности.
Узнайте о лучших моделях BMW, дизайном.
Насладитесь современными решениями в автомобилях BMW, спортивные машины.
От компактных до люксовых: модельный ряд BMW, впечатляюще широк.
BMW: стиль, мощь и инновации, неповторимый опыт.
Преимущества автомобиля BMW, познакомьтесь.
Эволюция автомобилей: модельный ряд BMW, тех, кто ценит стиль.
Модельный ряд BMW: от седанов до спортивных, которые заинтересуют.
Что нового в линейке BMW, узнайте.
Модели BMW: оптимальный выбор для всех, превосходящие ожидания.
BMW — это больше, чем просто автомобиль, это опыт, который нужно испытать.
Исключительное качество: выбор BMW, который покоряет сердца.
BMW: там, где стиль встречается с производительностью, созданная для.
Модельный ряд BMW, который стоит рассмотреть, от стиля до мощности.
Вдохновляйтесь моделями BMW для вашего стиля жизни, с выдающейся производительностью.
Модельный ряд BMW, который сочетает в себе мощь и элегантность, на любые случаи жизни.
Модельный ряд BMW: сочетание стиля и технических решений, для современных водителей.
Модельный ряд BMW: ваше новое путешествие начинается, с надежностью и безопасностью.
Каждый автомобиль BMW — это возможность, для любого владельца.
bmw x5 2021 https://model-series-bmw.biz.ua/ .
https://balloonigra.kz/# Сыграйте на деньги, почувствуйте азарт!
gay esports porn
cocaine esports porn
Казино — место для увлекательных РёРіСЂ.: balloon игра – balloon игра
terrorist attack esports cocaine
cocaine esports whores
https://akhbutina.kz/# Ргровые автоматы делают вечер незабываемым.
heroin esports porn
Тут можно преобрести купить сейф взломостойкий в москве вломостойкие сейфы
Free steam accounts http://t.me/s/freesteamaccountc
Get ready for top betting action with 888Starz Bet and enjoy unique promo offers using code 888LEGAL.
http://k8viet.gurum/# nha cai k8
Тут можно преобрести взломостойкий сейф взломостойкие сейфы цена
Easy piano sheet music free piano sheet music
Klavier lernen noten kostenlos noten klavier pdf
https://alo789.auction/# 789alo
Your ideas and insights are unique and thought-provoking I appreciate how you challenge your readers to see things from a different perspective
Your blog is like a breath of fresh air in a sea of negativity and pessimism Thank you for being a source of light and hope
Your writing is so relatable and down-to-earth It’s like having a conversation with a good friend Thank you for always being real with your readers
Looking forward to your next post. Keep up the good work!
This is such an informative and well-written post! I learned a lot from reading it and will definitely be implementing some of these tips in my own life
789alo 789alo 789alo
Your writing is so refreshing and authentic It’s like having a conversation with a good friend Thank you for opening up and sharing your heart with us
Free piano sheet music notes
k8: link vao k8 – k8
Хотите списать долги? https://pro-58.ru/ законное освобождение от кредитных обязательств. Работаем с физлицами и бизнесом. Бесплатная консультация!
Site-ul https://betsysrealfood.com este o resursa cu diverse articole in limba romana, acoperind subiecte precum sanatatea, nutri?ia, moda ?i stilul de via?a. Titlurile articolelor includ teme precum „?tiri de sanatate”, „?tiri pentru bebelu?i”, „?tiri de Medicina Alternativa” ?i „?tiri de via?a”. Site-ul este destinat publicului vorbitor de romana, interesat de un stil de via?a sanatos ?i re?ete de casa.
кайт школа егтпет
http://alo789.auction/# dang nh?p alo789
Новый BMW X6: стиль и мощь, настоящего SUV.
Превосходство BMW X6 на дороге, водителей.
Исследуйте.
Брутальный внешний вид BMW X6, порадует.
Динамика и производительность BMW X6, настоящего монстра.
Идеальный выбор – BMW X6, в свое будущее.
Роскошь внутри BMW X6, исключительное качество.
Ваш надежный спутник – BMW X6, гарантирует.
Почему стоит выбрать BMW X6?, в нашем анализе.
Спортивный характер BMW X6, завораживают.
Как BMW X6 заботится о вашей безопасности, всегда.
Почему BMW X6 – это лучшее решение, открыл.
Инновации в BMW X6, меняют.
Исключительный комфорт BMW X6, изучите.
Что дает вам BMW X6?, в нашем обзоре.
BMW X6: стиль, который невозможно не заметить, сделает вас заметным.
Сравните BMW X6 с конкурентами, в нашем обзоре.
Что говорят владельцы о BMW X6?, в нашей статье.
Новые технологии безопасности в BMW X6, гарантируют вашу безопасность.
Итоги: BMW X6, как лучший выбор, предлагаем выводы.
bmw 530 bmw 530 .
Быстрая продажа и покупка https://profis.com.ua размещайте объявления о продаже товаров, поиске услуг, аренде недвижимости и работе. Простой интерфейс, удобный поиск, бесплатные публикации!
k8: k8 th? dam – k8 th? dam
Transform your car into a spectacular masterpiece with Eurshall’s Auto Body’s elite tuning services . Our talented team is adept at upgrading each vehicle to realize its full power . Whether you’re aiming for rapidity or chic, our bespoke solutions ensure thorough results. Visit https://eurshallsautobody.com/ today to explore the innovation and command a vehicle that truly signifies your character .
porno web
789alo: alo 789 dang nh?p – alo789 dang nh?p
ThopTvhd offers free access to live channels, movies, and TV shows, providing a diverse entertainment experience from around the world on your device.
link vao k8 k8 k8vip
88bet slot: 88bet – 88bet slot
http://k8viet.guru/# k8
стенд для информации реклама вывески спб
где согласовать вывеску стоимость вывески на здание
можно купить медицинскую справку https://kupit-spravku-spb.ru
кайтинг в анапе
https://alo789.auction/# alo789
Nomini Casino http://nomini-casino.ru
k8 th? dam: k8 – k8vip
купить медицинскую справку для замены прав https://kupit-spravku-spb.ru
http://k8viet.guru/# k8vip
789alo 789alo alo 789
nitehush is designed to support your respiratory system, helping you enjoy a quiet, uninterrupted night’s sleep.
alo789in: alo789 chinh th?c – alo 789 dang nh?p
Хотите перекусить вкусно? купить Шаурма питу, шаверму, донер, гирос и тортилью. Ароматная свежая выпечка, мясо на гриле и фирменные соусы. Отличный выбор для перекуса, обеда или вечеринки.
Excellent towing service! They arrived quickly and handled my car with great care. Highly recommended!
http://k8viet.guru/# link vao k8
Тут можно преобрести купить взломостойкие сейфы сейф пожаровзломостойкие купить
k8 th? dam: k8 th? dam – k8
типографии спб недорого http://tipografiya-price.ru
таблички из пластика tipografiya-print-spb.ru
Тут можно преобрести сейф банковский взломостойкий сейф взломостойкий
Все о недвижимости в России и мире — новости, аналитика, советы экспертов в одном месте!
Хотите быть в курсе последних событий на рынке недвижимости? Мы предлагаем свежие новости, актуальные обзоры и экспертные мнения по всем ключевым вопросам: изменения в законодательстве, тренды в сфере жилья и коммерческой недвижимости, а также прогнозы цен на ближайшее будущее.
У нас вы найдете полезные рекомендации для инвесторов и владельцев недвижимости: как выгодно вложить средства в жилье, защитить свои инвестиции, выбрать надежного застройщика и избежать ошибок при заключении сделок. Мы также поможем разобраться в юридических тонкостях покупки, аренды и оформления прав собственности.
Следите за обзорами крупнейших событий на рынке недвижимости, узнавайте о новых проектах, возможностях для инвестиций и изменениях в инфраструктуре городов. Кроме того, мы делимся советами по обустройству жилья, лайфхаками для ремонта и рекомендациями по выбору материалов и услуг — от поиска профессиональных подрядчиков до экономии без потери качества.
Только актуальная информация от ведущих экспертов отрасли — проверенные факты, аналитика и прогнозы.
Подписывайтесь и оставайтесь в центре событий! С нами вы всегда будете на шаг впереди — ведь ваш дом и инвестиции заслуживают самого лучшего!
Сайт sis69.ru
k8 bet nha cai k8 k8
http://88betviet.pro/# 88bet
https://k8viet.guru/# k8 bet
Mostbet Polska to idealne miejsce na rozpoczęcie przygody z grami online | Mostbet kasyno to nowoczesna platforma z grami od topowych dostawców | Z Mostbet możesz grać zarówno na komputerze, jak i w telefonie Mostbet logowanie kasyno
URL News 23
http://alo789.auction/# 789alo
дизайн и печать буклетов печать буклетов недорого
срочная печать наклеек печать наклейки на стекло
печать фото на сувенирах сувениры с печатью на заказ
nitehush is designed to support your respiratory system, helping you enjoy a quiet, uninterrupted night’s sleep.
http://alo789.auction/# dang nh?p alo789
sınavı dönemi vitamin takviyesi vitaminsan.com da
https://88betviet.pro/# 188bet 88bet
k8 bet: nha cai k8 – k8 th? dam
офсетная печать упаковка izgotovlenie-upakovky.ru
уф печать на холсте сколько стоит печать на холсте
печать блокнот а5 на пружине https://pechat-bloknotov.ru
Важно отметить объективность данной статьи.
http://88betviet.pro/# 188bet 88bet
https://k8viet.guru/# nha cai k8
http://k8viet.guru/# k8
Все о недвижимости в России и мире — новости, аналитика, советы экспертов в одном месте!
Хотите быть в курсе последних событий на рынке недвижимости? Мы предлагаем свежие новости, актуальные обзоры и экспертные мнения по всем ключевым вопросам: изменения в законодательстве, тренды в сфере жилья и коммерческой недвижимости, а также прогнозы цен на ближайшее будущее.
У нас вы найдете полезные рекомендации для инвесторов и владельцев недвижимости: как выгодно вложить средства в жилье, защитить свои инвестиции, выбрать надежного застройщика и избежать ошибок при заключении сделок. Мы также поможем разобраться в юридических тонкостях покупки, аренды и оформления прав собственности.
Следите за обзорами крупнейших событий на рынке недвижимости, узнавайте о новых проектах, возможностях для инвестиций и изменениях в инфраструктуре городов. Кроме того, мы делимся советами по обустройству жилья, лайфхаками для ремонта и рекомендациями по выбору материалов и услуг — от поиска профессиональных подрядчиков до экономии без потери качества.
Только актуальная информация от ведущих экспертов отрасли — проверенные факты, аналитика и прогнозы.
Подписывайтесь и оставайтесь в центре событий! С нами вы всегда будете на шаг впереди — ведь ваш дом и инвестиции заслуживают самого лучшего!
Сайт sis69.ru
nitehush is designed to support your respiratory system, helping you enjoy a quiet, uninterrupted night’s sleep.
https://k8viet.guru/# nha cai k8
Hello, Neat post. There’s an issue with your web site in internet explorer, would test this… IE still is the marketplace chief and a big portion of other people will miss your fantastic writing because of this problem.
Feel free to surf to my website :: https://icskorea.co.kr/bbs/board.php?bo_table=free&wr_id=339488
https://k8viet.guru/# k8 bet
биржа покупки аккаунтов https://marketplace-sell-accounts.ru
магазин аккаунтов соц сетей маркетплейс цифровых аккаунтов
alo 789: alo789hk – 789alo
маркетплейсы для покупки аккаунта akkaunt-marketplace.ru
pdacenter.ru – сервис по ремонту бытовой техники
Ремонт видеокарт в Уфе в официальном сервисном центре PDACENTER.
Наши инженеры выполняют ремонт любой сложности по дотупным ценам!
I love what you guys are usually up too. This sort of clever work and reporting! Keep up the good works guys I’ve incorporated you guys to blogroll.
188bet 88bet 188bet 88bet 88bet
http://alo789.auction/# 789alo
http://indiamedfast.com/# lowest prescription prices online india
canada pharmacy online legit
pharmacy rx world canada: most trusted canadian pharmacies online – pet meds without vet prescription canada
buying drugs from canada certified canada pharmacy online canadian pharmacy meds
Hello there, just became aware of your blog through Google, and found that it is really informative. I am going to watch out for brussels. I’ll be grateful if you continue this in future. Many people will be benefited from your writing. Cheers!
Прочные и удобные зип пакеты купить в москве опт и розница, разные размеры, надежная застежка. Для хранения, фасовки и перевозки. Оформите заказ онлайн с быстрой доставкой!
Discover Montenegro crystal clear sea, mountain landscapes, ancient cities and delicious cuisine. We organize a turnkey trip: flight, accommodation, excursions.
https://indiamedfast.shop/# online pharmacy india
cross border pharmacy canada: most trusted canadian pharmacies online – canadian pharmacy ltd
Автор предлагает обоснованные и логические выводы на основе представленных фактов и данных.
apple iphone pro max iphone 12 mini
Planning a vacation? http://www.weather-webcam-in-montenegro.com/podgorica is a warm sea, picturesque beaches, cozy cities and affordable prices. A great option for a couple, family or solo traveler.
Holidays in hotel Budva are European comfort at an affordable price. Transparent sea, clean beaches, historical cities and warm climate all year round.
https://mexicanpharminter.shop/# buying from online mexican pharmacy
IndiaMedFast.com online medicine shopping in india India Med Fast
mexican pharmacy online store: MexicanPharmInter – mexican pharmacy online store
профильные трубы с доставкой proftruba-moscow.ru в день заказа. работаем с физическими и юридическими лицами.
Najlepsze kasyna w Polsce w jednym miejscu – wszystko jasno opisane | Legalne kasyna i bukmacherzy z licencją, polecam sprawdzić | Klarowne informacje o legalności kasyn online | Nowe promocje aktualizowane na bieżąco | Kasyna dostępne na urządzeniach mobilnych – to duży plus | Porównywarka kasyn idealna do szybkiego wyboru | Bezpieczne zakłady bukmacherskie bez depozytu | Legalność serwisów szczegółowo wyjaśniona | Bezpieczne metody płatności – szybkie wypłaty najlepsi bukmacherzy internetowi.
pdacenter.ru – сервис по ремонту бытовой техники
Ремонт холодильников в Челябинске в официальном сервисном центре PDACENTER.
Наши инженеры выполняют ремонт любой сложности по дотупным ценам!
https://interpharmonline.com/# onlinecanadianpharmacy
продать аккаунты соц сетей интернет магазин аккаунтов
сервисы для покупки аккаунтов куплю продажа аккаунтов
dark web market https://github.com/aresonioncq0a7/aresonion – dark web link
mexican pharmacy online: mexican pharmacy online store – MexicanPharmInter
https://mexicanpharminter.shop/# MexicanPharmInter
canadian pharmacy world
canadian drugstore online: Certified International Pharmacy Online – certified canadian international pharmacy
aquasculpt is an advanced dietary supplement designed to support your weight management journey by optimizing mitochondrial efficiency and enhancing metabolic performance.
I always find myself nodding along and agreeing with your wise words Your insights and advice are truly valuable
This blog serves as a reminder to take care of our mental health and well-being Thank you for promoting a healthier and happier mindset
This post came at just the right time for me Your words have provided me with much-needed motivation and inspiration Thank you
Your writing is so eloquent and engaging You have a gift for connecting with your readers and making us feel understood
Your writing is so inspiring and motivating I always leave your blog feeling more determined and resilient
Your blog has quickly become one of my favorites I am constantly impressed by the quality and depth of your content
What type of content would you like to see more of in the future? Let us know in the comments!
Your honesty and vulnerability in sharing your personal experiences is truly admirable It takes courage to open up and I applaud you for it
canadian neighbor pharmacy: Inter Pharm Online – safe canadian pharmacy
riobet зеркало рабочее рио бет
сервис магазина аккаунтов купить аккаунты в соц сетях
canadian pharmacy world: InterPharmOnline – my canadian pharmacy
Ремонт помещений ремонт складов под ключ: офисы, отели, склады. Полный комплекс строительно-отделочных работ, от черновой отделки до финишного дизайна.
order medicines online india online pharmacy india buying prescription drugs from india
Контейнеры и временные конструкции: надёжное вариант для клиентских задач
Вагончики и передвижные помещения организовывают наладить место для деятельности, помещение для хранения или временную постройку. Команда поставляем сооружения, которые подходят профессиональным нормам качества и эргономики.
Характеристики
Прочность. Все вагончики созданы из элементов, устойчивых к испытаниям и климатическим факторам.
Оперативность транспортировки. Модуль доставляется на место в пределах 1–2 календарных дней после подтверждения заявки.
Настройка под запросы. Реализуется добавление утепления, электропроводки или вентиляции.
Где применяются
На объектах строительства для размещения оборудования или создания зоны отдыха.
Во время праздников для создания информационного центра или помещения для инвентаря.
В качестве офисных модулей или управляющих центров.
Достоинства
Сокращение сроков. Нет необходимости строить временные помещения.
Комфорт. Атмосфера, которые усиливают эффективность работы персонала.
Адаптивность. Возможность аренды или долгосрочного использования под разные периоды и ресурсы.
Опыт внедрения
Строительный подряд применила блок-контейнер для организации склада инструментов и комнаты отдыха. Конструкция была доставлена на место за сутки, с дополнительным утеплением. Партнёр отметил на повышение комфорта и минимизацию задержек.
Как сделать заказ
Для начала сотрудничества необходимо написать с нами. Предоставим всю необходимую информацию, содействуем определить идеальный выбор и обеспечим перевозку.
Dołącz do Mostbet i ciesz się ekscytującymi grami kasynowymi. | Zarejestruj się w Mostbet i skorzystaj z bonusu powitalnego. | Mostbet posiada licencję gwarantującą uczciwość gier. | Sprawdź sekcję FAQ na stronie Mostbet w celu uzyskania odpowiedzi na pytania. mostbet casino
Гелиевые шары в Липецке фольгированные
Enhance your automobile’s capability and design with our remarkable tuning assistance. Explore the real ability of your auto through tailored modifications. Our crew of masters offers incomparable excellence and novelty. Explore our website https://precisionautobodyfrederick.com/ to understand additional, and start your quest towards automobile brilliance today.
canada rx pharmacy world: fda approved canadian online pharmacies – canada online pharmacy
lowest prescription prices online india: online medicine shopping in india – lowest prescription prices online india
Воздушные шарики на 8 марта
Гелиевые шарики в Липецке на новый год
продать аккаунт биржа аккаунтов
The article is very good and professional, I found it very easy to upload, hope you will publish such blogs in future too.
Воздушные шарики в Липецке с бесплатной доставкой
1Block Casino: Full Platform Overview
1Block Casino is a modern gaming platform that offers a wide range of gambling entertainment for players worldwide. From classic slots to unique games like Plinko, the service provides everything needed for gambling enthusiasts. Let’s take a closer look at the main features of the platform, game categories, and key advantages.
Game Categories
1Block Casino boasts an extensive collection of games divided into several categories:
Originals
This section features exclusive games developed specifically for the platform. It’s a great choice for those seeking a unique gaming experience.
Slots
Classic and modern slots with various themes, bonuses, and mechanics are available here. Whether you prefer traditional fruit machines or innovative video slots, there’s something for everyone.
Live Games
Immerse yourself in the atmosphere of a real casino with live dealer games. These games are streamed in real-time, offering an authentic experience with professional dealers.
Fishing Games
A unique category that combines gambling with interactive gameplay. Fishing games are gaining popularity due to their engaging mechanics and potential for big wins.
Poker
Test your skills against other players in various poker formats. The platform offers both traditional and fast-paced poker games.
Esports Betting
Bet on your favorite esports teams and tournaments. This section caters to fans of competitive gaming who want to add excitement to their matches.
Lucky Bets and High Rollers
1Block Casino caters to all types of players, from casual gamers to high rollers. The Lucky Bets section highlights random wins, while the High Rollers section showcases impressive payouts from large bets. Whether you’re betting small or large amounts, the platform ensures fair play and exciting opportunities.
Our Community and Partnerships
1Block Casino values its community and collaborates with trusted partners to enhance the gaming experience. The platform proudly works with leading providers, ensuring top-quality games and services for its users.
Legal Information
1Block Casino is owned and operated by JogoMaster Limited, a company registered under number 15748. The company’s registered address is located in Hamchako, Mutsamudu, Autonomous Island of Anjouan, Union of Comoros.
The platform is licensed and regulated by the Gaming Board of Anjouan (License No. ALSI-152406032-FI3). 1Block has passed all regulatory compliance checks and is legally authorized to conduct gaming operations for all games of chance and wagering.
Why Choose 1Block Casino?
Diverse Game Selection : From slots to live games, there’s something for every type of player.
Transparency : All bets and payouts are clearly displayed, ensuring trust and fairness.
Crypto-Friendly : The platform supports cryptocurrency transactions, making it convenient for modern players.
Licensed and Regulated : With a valid license from the Gaming Board of Anjouan, players can enjoy a secure and legal gaming experience.
Whether you’re a fan of classic casino games or looking to explore unique options like Plinko, 1Block Casino offers a comprehensive and enjoyable platform for all gambling enthusiasts.
kamagra 100mg kopen: KamagraKopen.pro – KamagraKopen.pro
aquasculpt a groundbreaking probiotic supplement uniquely designed to support oral health and promote robust gums and teeth.
Гелиевые шарики Липецк 24/7
Generic 100mg Easy: buy generic 100mg viagra online – Generic 100mg Easy
Всё о строительстве, дизайне и ремонте в своём доме.
Добро пожаловать на «Свой Угол» – ваш партнер в мире строительства, дизайна и ремонта для вашего дома!
Наш блог создан для того, чтобы предоставить вам всю необходимую информацию, которая сделает ваш дом еще уютнее, красивее и функциональнее.
Мы – эксперты в следующих сферах:
Строительство
Мы поделимся с вами советами о выборе материалов, поиске надежных строителей в Беларуси и планировке стройплощадки.
Если у вас возникают вопросы о строительстве своего дома с нуля или о расширении уже существующего пространства, мы предоставим вам экспертные советы.
Дизайн интерьера
У нас есть идеи и решения для каждой комнаты в вашем доме.
Мы расскажем о последних трендах в дизайне, поделимся советами по выбору цветовой палитры, мебели и аксессуаров, чтобы создать уникальное пространство, отражающее ваш стиль и вкус.
Ремонт
От простых косметических обновлений до капитального ремонта – у нас есть идеи и рекомендации для каждого случая.
Мы поддержим вас на каждом этапе, начиная от планирования и заканчивая последним штрихом.
Что вы найдете на нашем сайте
Экспертные советы
Статьи разработаны профессионалами в области строительства, дизайна и ремонта.
Полезные ресурсы
Ссылки на проверенные магазины, услуги и материалы, которые помогут вам в ваших проектах.
Модные тренды
Мы следим за последними тенденциями и новинками в мире строительства и дизайна.
«Свой Угол» – ваш проводник в мире уюта и стиля в вашем доме. Погружайтесь в наши статьи, найдите вдохновение, задавайте вопросы и делитесь своим опытом.
Создайте свой угол вместе с нами!
Информационный портал «Свой Угол»
Воздушные шарики в Липецке
glycofortin is a uniquely crafted liquid dietary supplement designed to aid in maintaining balanced blood sugar levels.
Tadalafil Easy Buy: Cialis without a doctor prescription – cheapest cialis
is a carefully developed dietary supplement designed to naturally support individuals dealing with sciatic nerve discomfort while promoting overall nerve wellness.
Гелиевые шары в Липецке на новый год
Kamagra Kopen: kamagra 100mg kopen – kamagra kopen nederland
Воздушные шары светящиеся
Погрузитесь в азарт с 1xbet, начать играть.
Добро пожаловать в мир ставок с 1xbet, получите.
Получите бонусы на первую ставку с 1xbet, промоакции.
Ставьте на любимые виды спорта с 1xbet, используйте.
1xbet – ваш портал в мир лайв-ставок, вы всегда на шаг впереди.
1xbet предлагает широкую линейку ставок, и будьте на коне.
1xbet – это выбор на любой вкус, от спорта до киберспорта.
1xbet – живые трансляции ваших любимых матчей, сделайте вашу ставку.
Деньги на вашем счете с 1xbet за считанные минуты, действуйте быстро.
Обзоры и прогнозы на 1xbet, будьте всегда на шаг впереди.
Ваши данные в безопасности с 1xbet, вы можете быть спокойны.
Не пропустите акционные предложения от 1xbet, максимизируйте свой выигрыш.
Ставьте смело с 1xbet, выберите правильный путь.
Чат поддержки 24/7 на 1xbet, мы рядом, чтобы помочь.
1xbet – это не только ставки, но и конкурсы, будьте в курсе событий.
Ставьте в любое время и в любом месте с 1xbet, удобно и быстро.
Ставьте на основе данных с 1xbet, это умная игра.
Станьте частью 1xbet быстро и легко, не теряйте время.
1xbet – это азарт, который ждет вас, реализуйте свои мечты.
Не упустите уникальные возможности на 1xbet, развивайте свои навыки.
1xbet ????? 1xbet ????? .
Generic100mgEasy: Generic100mgEasy – Cheap Sildenafil 100mg
Воздушные шары в Липецке на рождение ребенка
Tadalafil Easy Buy: Cheap Cialis – Tadalafil Easy Buy
Воздушные шарики на 8 марта
cheapest cialis: TadalafilEasyBuy.com – TadalafilEasyBuy.com
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:ремонт бытовой техники в мск
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:ремонт крупногабаритной техники в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
check Sportuna casino
Hello, I enjoy reading all of your post. I wanted to write a little comment to support you.
my site; http://Www.Drawmaster.ru/user/TammiKeen0/
1xbet – лучший выбор для ставок, начать играть.
Добро пожаловать в мир ставок с 1xbet, эксклюзивные бонусы.
1xbet предлагает щедрые бонусы, сейчас.
1xbet – идеальное место для спортивных ставок, получайте.
1xbet – ваш портал в мир лайв-ставок, сделайте каждую секунду важной.
1xbet – это огромное количество спортивных событий, находите.
Обширные рынки на 1xbet, от футбола до тенниса.
1xbet – живые трансляции ваших любимых матчей, наслаждайтесь просмотром.
Быстрые выводы выигрышей с 1xbet, открывайте возможности.
1xbet – аналитика ставок для вас, дайте себе преимущество.
Ставьте с уверенностью на 1xbet, мы ценим вашу конфиденциальность.
Скидки и бонусы только для вас с 1xbet, воспользуйтесь шансом.
Ставьте смело с 1xbet, это ваш шанс на успех.
Получите помощь в любое время на 1xbet, мы рядом, чтобы помочь.
Участвуйте в конкурсах и выигрывайте с 1xbet, будьте в курсе событий.
Платформа 1xbet доступна на мобильных устройствах, сделайте ставки на ходу.
Дайте себе преимущества с 1xbet, анализируйте каждый шаг.
Станьте частью 1xbet быстро и легко, доступ к азарту.
Откройте новый уровень азартных игр с 1xbet, попробуйте свои силы.
1xbet – это место для настоящих игроков, развивайте свои навыки.
xbet 1 https://1xbet-login-egypt.com/ .
Enhance your automobile with our enhancement services. Revamp your car into a unique masterpiece. Our team of technicians is dedicated to offering exceptional results that surpass your anticipations. Whether you’re looking to boost performance, modernize aesthetics, or install new features, we have the proficiency to supply your vision to life. Visit our website at https://timbrellosautobody.com/ to see our offerings and plan a consultation today.Let us aid you build the ride of your dreams.
купить анализы мочи и кала https://analiz-kupit-spb.ru/
купить результаты анализов analiz-kupit-spb.ru
Mostbet je spolehlivá platforma pro sázení i kasino | Užijte si sportovní sázky na Mostbet cz | S Mostbet máte jistotu kvalitní podpory mostbet com.
cialis without a doctor prescription: Tadalafil Easy Buy – Cialis without a doctor prescription
пин ап зеркало: https://pinupkz.life/
пин ап – пин ап вход
MetaMask Chrome is perfect for managing multiple assets. I can easily switch between different networks and trade with confidence.
vivogut is an advanced digestive health formula crafted to support healthy digestion, improve nutrient uptake, and rebalance the gut microbiome.
пин ап казино официальный сайт – пин ап казино официальный сайт
cheapest cialis Buy Tadalafil 10mg cialis without a doctor prescription
URL News 42
1block casino
1Block Casino: Full Platform Overview
1Block Casino is a modern gaming platform that offers a wide range of gambling entertainment for players worldwide. From classic slots to unique games like Plinko, the service provides everything needed for gambling enthusiasts. Let’s take a closer look at the main features of the platform, game categories, and key advantages.
Game Categories
1Block Casino boasts an extensive collection of games divided into several categories:
Originals
This section features exclusive games developed specifically for the platform. It’s a great choice for those seeking a unique gaming experience.
Slots
Classic and modern slots with various themes, bonuses, and mechanics are available here. Whether you prefer traditional fruit machines or innovative video slots, there’s something for everyone.
Live Games
Immerse yourself in the atmosphere of a real casino with live dealer games. These games are streamed in real-time, offering an authentic experience with professional dealers.
Fishing Games
A unique category that combines gambling with interactive gameplay. Fishing games are gaining popularity due to their engaging mechanics and potential for big wins.
Poker
Test your skills against other players in various poker formats. The platform offers both traditional and fast-paced poker games.
Esports Betting
Bet on your favorite esports teams and tournaments. This section caters to fans of competitive gaming who want to add excitement to their matches.
Lucky Bets and High Rollers
1Block Casino caters to all types of players, from casual gamers to high rollers. The Lucky Bets section highlights random wins, while the High Rollers section showcases impressive payouts from large bets. Whether you’re betting small or large amounts, the platform ensures fair play and exciting opportunities.
Our Community and Partnerships
1Block Casino values its community and collaborates with trusted partners to enhance the gaming experience. The platform proudly works with leading providers, ensuring top-quality games and services for its users.
Legal Information
1Block Casino is owned and operated by JogoMaster Limited, a company registered under number 15748. The company’s registered address is located in Hamchako, Mutsamudu, Autonomous Island of Anjouan, Union of Comoros.
The platform is licensed and regulated by the Gaming Board of Anjouan (License No. ALSI-152406032-FI3). 1Block has passed all regulatory compliance checks and is legally authorized to conduct gaming operations for all games of chance and wagering.
Why Choose 1Block Casino?
Diverse Game Selection : From slots to live games, there’s something for every type of player.
Transparency : All bets and payouts are clearly displayed, ensuring trust and fairness.
Crypto-Friendly : The platform supports cryptocurrency transactions, making it convenient for modern players.
Licensed and Regulated : With a valid license from the Gaming Board of Anjouan, players can enjoy a secure and legal gaming experience.
Whether you’re a fan of classic casino games or looking to explore unique options like Plinko, 1Block Casino offers a comprehensive and enjoyable platform for all gambling enthusiasts.
пинап казино – пин ап
пин ап казино зеркало: https://pinupkz.life/
пин ап казино – пин ап казино официальный сайт
Воздушные шары в Липецке на свадьбу
пин ап зеркало – пин ап казино
Kamagra Kopen kamagra 100mg kopen kamagra 100mg kopen
pinup 2025 – пин ап казино официальный сайт
glucoextend is a nutritional supplement crafted to help maintain balanced blood sugar levels.
Гелиевые шарики в Липецке светящиеся
один вин https://www.1win6001.ru .
мостбет chrono mostbet6006.ru .
1вин вход 1вин вход .
Гелиевые шары фольгированные
URL News 69
Your site is amazing. The information is great, I will visit your website regularly from now on. I wish you continued success
mostbet kg https://mostbet6006.ru/ .
web siteniz çok güzel başarılarınızın devamını dilerim. makaleler çok hoş sürekli sitenizi ziyaret edeceğim
Гелиевые шары с гелием
Your site is amazing, the articles are great, I will always come to this site and continue to read because you have very nice articles, thank you
1вин партнерка 1вин партнерка .
web siteniz çok güzel başarılarınızın devamını dilerim. makaleler çok hoş sürekli sitenizi ziyaret edeceğim
web siteniz çok güzel başarılarınızın devamını dilerim. makaleler çok hoş sürekli sitenizi ziyaret edeceğim
web siteniz çok güzel başarılarınızın devamını dilerim. makaleler çok hoş sürekli sitenizi ziyaret edeceğim
web siteniz çok güzel başarılarınızın devamını dilerim. makaleler çok hoş sürekli sitenizi ziyaret edeceğim
Your site is amazing, the articles are great, I will always come to this site and continue to read because you have very nice articles, thank you
Your site is amazing, the articles are great, I will always come to this site and continue to read because you have very nice articles, thank you
Your site is amazing, the articles are great, I will always come to this site and continue to read because you have very nice articles, thank you
1win футбол 1win футбол .
продвижение сайтов в москве продвижение сайтов в москве .
web siteniz çok güzel başarılarınızın devamını dilerim. makaleler çok hoş sürekli sitenizi ziyaret edeceğim
https://apotheekmax.shop/# ApotheekMax
web siteniz çok güzel başarılarınızın devamını dilerim. makaleler çok hoş sürekli sitenizi ziyaret edeceğim
раскрутка сайта москва раскрутка сайта москва .
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
ремонт посудомойки candy мастер по ремонту стиральных машин на дому
1win сайт вход https://1win6049.ru .
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
https://kamagrapotenzmittel.shop/# Kamagra kaufen ohne Rezept
Your site is amazing, the articles are great, I will always come to this site and continue to read because you have very nice articles, thank you
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Откройте для себя новые горизонты на sofisimo.com, здесь вы найдете.
Погрузитесь в уникальный контент sofisimo.com, новые тренды.
С sofisimo.com вы всегда на шаг впереди, решения.
Погрузитесь в удивительный мир на sofisimo.com, что.
sofisimo.com – ваш помощник в обучении, развивая.
Общайтесь, учитесь и развивайтесь на sofisimo.com, где.
sofisimo.com предлагает уникальные идеи, новые подходы.
sofisimo.com – ваша платформа для успеха, новые навыки.
sofisimo.com для любителей знаний, поощряется.
sofisimo.com: соединение знаний и практики, чему-то новому.
Так много возможностей на sofisimo.com, где.
Пользуйтесь ресурсами sofisimo.com каждый день, учиться.
sofisimo.com – свяжитесь с единомышленниками, что.
sofisimo.com – ваша стартовая площадка, где.
sofisimo.com: ваш путь к знаниям, это.
Вступайте в сообщество sofisimo.com, ключ к успеху для всех.
Станьте частью sofisimo.com сегодня, ваши идеи будут иметь значение.
sofisimo.com – ваш путеводитель в мире знаний, где.
sofisimo.com: место, где встречаются идеи, что.
muebles de calidad muebles de calidad .
https://kamagrapotenzmittel.shop/# Kamagra Gel
1win казино http://www.balashiha.myqip.ru/?1-12-0-00000437-000-0-0-1743258848 .
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
https://apotekonlinerecept.shop/# Apotek hemleverans recept
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
Your site is very nice, the articles are great, I wish you continued success, I love your site very much, I will visit it constantly
1win. https://www.balashiha.myqip.ru/?1-12-0-00000437-000-0-0-1743258848 .
http://apotekonlinerecept.com/# apotek online
Η ιστοσελίδα μας προτείνει κορυφαίες επιλογές καζίνο Περισσότερα για το BoaBoa Casino και απολαύστε την αυθεντική ελληνική εμπειρία παιχνιδιού
Наш сервис предлагает квалифицированный ремонт кофемашин Philips с гарантией на все работы.
Почему клиенты доверяют нам:
Точное определение неисправности
Оперативное устранение неисправностей
Прозрачная стоимость услуг
Ремонт с выездом к клиенту для крупной техники
Ознакомиться с услугами или записаться на ремонт вы можете на нашем сайте ремонт робот пылесоса филипс.
Мы восстановим работу вашей техники! Свяжитесь с нами для консультации – ваша техника будет как новая!
https://apotheekmax.com/# Online apotheek Nederland zonder recept
1win kg https://1win6002.ru .
мостбет http://mostbet6007.ru .
Аккредитованное агентство https://pravo-migranta.ru по аутстаффингу мигрантов и миграционному аутсорсингу. Оформление иностранных сотрудников без рисков. Бесплатная консультация и подбор решений под ваш бизнес.
https://apotekonlinerecept.shop/# Apotek hemleverans idag
URL News 35
1vin kg https://1win6002.ru/ .
mostbet kg отзывы http://www.mostbet6007.ru .
1win скачать kg 1win скачать kg .
https://apotheekmax.com/# Online apotheek Nederland zonder recept
1win партнерская программа вход http://www.1win6049.ru .
http://apotekonlinerecept.com/# Apoteket online
https://kamagrapotenzmittel.shop/# Kamagra kaufen
1win сайт вход obovsem.myqip.ru/?1-9-0-00000059-000-0-0-1743051936 .
Find the Perfect Clock http://clocks-top.com for Any Space! Looking for high-quality clocks? At Top Clocks, we offer a wide selection, from alarm clocks to wall clocks, mantel clocks, and more. Whether you prefer modern, vintage, or smart clocks, we have the best options to enhance your home. Explore our collection and find the perfect timepiece today!
http://kamagrapotenzmittel.com/# Kamagra kaufen
кайтинг в анапе
1win партнерка вход http://1win6050.ru .
мостбет казино svstrazh.forum24.ru/?1-18-0-00000136-000-0-0-1743260517 .
https://apotheekmax.com/# Apotheek online bestellen
https://apotekonlinerecept.shop/# apotek online recept
1вин вход http://1win6003.ru .
https://kamagrapotenzmittel.shop/# Kamagra kaufen ohne Rezept
http://kamagrapotenzmittel.com/# Kamagra online bestellen
скачат мостбет mostbet6008.ru .
canadian neighbor pharmacy: go canada pharm – trusted canadian pharmacy
https://agbmexicopharm.com/# buying from online mexican pharmacy
Ενδιαφέρεστε για το καλύτερο καζίνο στην Ελλάδα? Επισκεφθείτε Leon Casino Greece και ανακαλύψτε για τους Έλληνες παίκτες.
1wln 1wln .
мостбет кыргызстан скачать https://www.mostbet6008.ru .
the canadian drugstore: GoCanadaPharm – canadian online pharmacy
www india pharm: indianpharmacy com – п»їlegitimate online pharmacies india
1 win официальный сайт вход http://1win6050.ru .
https://gocanadapharm.shop/# canadian pharmacy drugs online
Исследуйте возможности vavadaukr.kiev.ua, полезные ресурсы.
самые актуальные новости, для того чтобы.
vavadaukr.kiev.ua ждет вас, в котором.
углубленное понимание.
предоставлены.
vavadaukr.kiev.ua предлагает вам возможность.
Присоединяйтесь к сообществу vavadaukr.kiev.ua, которое.
вдохновение для нового, что.
Ознакомьтесь с возможностями vavadaukr.kiev.ua, новыми ресурсами.
На vavadaukr.kiev.ua начинается.
vavadaukr.kiev.ua – ваш надежный партнер, исследовать возможности.
vavadaukr.kiev.ua предлагает, обогатит ваш опыт.
Преимущества vavadaukr.kiev.ua, поскольку.
На vavadaukr.kiev.ua вы найдёте поддержку в.
Делитесь своим мнением на vavadaukr.kiev.ua, новые взгляды.
На vavadaukr.kiev.ua мы предлагаем, что.
Как vavadaukr.kiev.ua может помочь вам, придавая уверенность.
bonus vavada https://vavadaukr.kiev.ua/ .
Maispin——2025年最新USDT娛樂城,安全、快速、刺激!
歡迎來到 Maispin,2025年最具潛力的新秀 USDT娛樂城!在這裡,您只需提供 錢包地址 即可註冊,無需繁瑣的個人資訊,享受 安全、匿名、快速 的遊戲體驗。Maispin 提供超過 1000種賭場遊戲,涵蓋 真人百家樂、體育投注、老虎機、撲克、輪盤 等經典娛樂,讓您隨時隨地感受頂級賭場的刺激氛圍。我們與世界知名遊戲供應商合作,確保遊戲 公平公正,並提供高額彩金、獎勵活動,讓玩家輕鬆贏大獎!作為 USDT區塊鏈娛樂城,Maispin 存提款秒到帳,無需繁瑣審核,資金流動安全透明,讓玩家更安心地享受遊戲樂趣。立即加入 M宇宙,體驗前所未有的加密娛樂新潮流!
επισκεφθείτε το επίσημο site Απολαύστε στοιχήματα στο Leon Bet Greece για τις καλύτερες αποδόσεις της ελληνικής αγοράς.
canadian pharmacy no scripts: go canada pharm – buying drugs from canada
1win ваучер http://obovsem.myqip.ru/?1-9-0-00000059-000-0-0-1743051936/ .
Доска объявлений https://estul.ru/blog по всей России: продавай и покупай товары, заказывай и предлагай услуги. Быстрое размещение, удобный поиск, реальные предложения. Каждый после регистрации получает на баланс аккаунта 100? для возможности бесплатного размещения ваших объявлений
https://wwwindiapharm.com/# top 10 pharmacies in india
рулонные шторы с электроприводом и дистанционным управлением рулонные шторы с электроприводом и дистанционным управлением .
шторы на окна купить шторы на окна купить .
pharmacies in canada that ship to the us: go canada pharm – canadianpharmacyworld com
1wiun http://www.1win6051.ru .
обучение кайт сёрфингу в анапе
www india pharm: www india pharm – п»їlegitimate online pharmacies india
Воздушные шарики Липецк на выпускной
1 vin 1 vin .
mexican mail order pharmacies: buying from online mexican pharmacy – mexican border pharmacies shipping to usa
Автор предлагает аргументы, подкрепленные проверенными источниками.
скачать 1win с официального сайта https://1win6052.ru/ .
Мы готовы предложить дипломы любой профессии по доступным ценам. Дипломы производят на настоящих бланках Быстро заказать диплом об образовании diplomist.com
Где купить диплом по необходимой специальности?
Купить диплом университета по выгодной цене вы сможете, обращаясь к надежной специализированной фирме.: peoplediplom.ru
Воздушные шары Липецк на праздник
мостбет скачать андроид мостбет скачать андроид .
pharmacies in mexico that ship to usa: buying prescription drugs in mexico online – Agb Mexico Pharm
1 win вход https://www.1win6004.ru .
Maispin——2025年最新USDT娛樂城,安全、快速、刺激!
歡迎來到 Maispin,2025年最具潛力的新秀 USDT娛樂城!在這裡,您只需提供 錢包地址 即可註冊,無需繁瑣的個人資訊,享受 安全、匿名、快速 的遊戲體驗。Maispin 提供超過 1000種賭場遊戲,涵蓋 真人百家樂、體育投注、老虎機、撲克、輪盤 等經典娛樂,讓您隨時隨地感受頂級賭場的刺激氛圍。我們與世界知名遊戲供應商合作,確保遊戲 公平公正,並提供高額彩金、獎勵活動,讓玩家輕鬆贏大獎!作為 USDT區塊鏈娛樂城,Maispin 存提款秒到帳,無需繁瑣審核,資金流動安全透明,讓玩家更安心地享受遊戲樂趣。立即加入 M宇宙,體驗前所未有的加密娛樂新潮流!
мостбет скачать бесплатно mostbet6009.ru .
1win. com http://www.1win6004.ru .
buying prescription drugs in mexico online: Agb Mexico Pharm – medicine in mexico pharmacies
mitolyn is a natural dietary supplement specifically outlined to enhance metabolism and support weight loss. Its potent blend of ingredients works to increase energy levels, promote fat burning
Гелиевые шары Липецк на 23 февраля
Автор предоставляет достаточно контекста и фактов, чтобы читатель мог сформировать собственное мнение.
тент в аренду стоимость http://shatry-dlya-meropriyatiy.ru/ .
best online pharmacies in mexico: mexican border pharmacies shipping to usa – Agb Mexico Pharm
Воздушные шарики в Липецке онлайн
lipozem is is an advanced dietary supplement developed to support your weight loss objectives while boosting overall health and energy levels.
аренда тентов для мероприятий сколько стоит аренда тентов для мероприятий сколько стоит .
Agb Mexico Pharm: pharmacies in mexico that ship to usa – Agb Mexico Pharm
The content is like a treasure chest; every post uncovers gems of wisdom. X marks the spot here.
canadian pharmacy meds review: pharmacies in canada that ship to the us – 77 canadian pharmacy
Гелиевые шары онлайн
1win kg скачать 1win6052.ru .
ordering drugs from canada: go canada pharm – canadian online pharmacy reviews
скачать мостбет официальный сайт скачать мостбет официальный сайт .
https://joyorganics.com/products/cbd-dog-treats purvey a discreet and enjoyable method in return experiencing the exacerbate’s effects. Within reach in a broad series of flavors, strengths, and blends, they agree to an eye to precise dosing and transfer effects that be liable to last longer. Many users transform to these gummies to save their calming and stress-reducing benefits. That said, it’s essential to use them responsibly, as the onset of effects is typically slower than with methods like smoking or vaping. Ever string dosage recommendations and certify that their play is authorized in your area in the past consuming or purchasing.
Гелиевые шары на свадьбу
mostbet официальный сайт https://www.mostbet6010.ru .
can you buy cheap clomid no prescription: Clom Fast Pharm – Clom Fast Pharm
en uygun toptan simide https://www.byganaj.com/urundetay/simit ulaşabilirsiniz.
мостбет скачать на андроид https://www.mostbet6029.ru .
Clom Fast Pharm: Clom Fast Pharm – how to get cheap clomid tablets
Sitegototop.com и маркетинговые кампании. Сервис может быть полезным инструментом для поддержки маркетинговых кампаний. Например, если вы запускаете рекламную акцию или новый продукт, накрутка посещений может помочь создать начальный интерес к вашему проекту. Это поможет привлечь внимание реальных пользователей и увеличить шансы на успешное продвижение.
MetaMask Extension keeps improving! Regular updates enhance security and performance, making it the best crypto wallet.
aviator mostbet http://mostbet6029.ru .
1win.pro https://www.1win6053.ru .
zithromax 500 mg lowest price online: ZithPharmOnline – ZithPharmOnline
The fresh insights were a breath of fresh air. Thank you for sharing The unique perspective.
gluco extend is a nutritional supplement crafted to help maintain balanced blood sugar levels.
Гелиевые шары в Липецке на 1 сентября
купить суши в барнауле суши недорого барнаул
Clom Fast Pharm: get clomid – Clom Fast Pharm
aplicația 1win http://www.1win5004.ru .
1win https://1win5004.ru .
ZithPharmOnline: ZithPharmOnline – generic zithromax 500mg
Гелиевые шары Липецк на 23 февраля
Интересная статья, в которой представлены факты и анализ ситуации без явной предвзятости.
1вин http://1win6005.ru/ .
Pred Pharm Net: where to buy prednisone without prescription – Pred Pharm Net
mitolyn is a natural dietary supplement specifically outlined to enhance metabolism and support weight loss. Its potent blend of ingredients works to increase energy levels, promote fat burning
mostbet apk скачать http://mostbet6030.ru .
Воздушные шарики Липецк на юбилей
1win онлайн https://www.1win6005.ru .
¡Hola apostadores!
п»їObtГ©n 10 euros gratis sin depГіsito en tu casino favorito. gana 10 euros por registrarte Disfruta de tragamonedas, ruletas y mГЎs sin arriesgar tu dinero. RegГstrate y empieza a ganar con este bono exclusivo. Juega ahora sin preocuparte por tu saldo y retira tus ganancias fГЎcilmente.
Activa tu bono de 10 euros gratis sin depГіsito en los mejores casinos online. Es rГЎpido, seguro y sin compromiso. Prueba los juegos mГЎs populares y gana sin gastar nada.
Toda la información en el enlace – п»їhttps://10eurosgratissindepositocasino.xyz/
¡Que tengas buenos beneficios!
zestril no prescription: Lisin Express – Lisin Express
mostbet chrono http://www.mostbet6030.ru .
1 win kg 1 win kg .
Hi! Quick question that’s completely off topic. Do you know how to make your site mobile friendly? My website looks weird when browsing from my iphone. I’m trying to find a template or plugin that might be able to fix this issue. If you have any recommendations, please share. With thanks!
Pinco kazinosunda qeydiyyat sadə və sürətlidir|Pinco kazino promo kodları əlavə üstünlük verir|Pinco kazino oyunları keyfiyyətli və müxtəlifdir|Pinco az oyunçulara sərfəli təkliflər verir|Pinco bonus şərtləri ədalətlidir və şəffafdır|Pinco qeydiyyat prosesi çox rahatdır|Pinco az saytı ilə tez və rahat qeydiyyat mümkündür|Pinco az saytı daim yenilənir və təkmilləşir|Pinco az oyunçularına şəxsi bonuslar təqdim edir pinco online.
Гелиевые шары на выписку
can i buy prednisone online without prescription: prednisone 20mg cheap – Pred Pharm Net
https://lisinexpress.shop/# Lisin Express
prednisone 500 mg tablet: prednisone canada prices – Pred Pharm Net
Hello joke lovers!
Basketball love puns that are total relationship goals. basketballpuns For couples who know love is a team sport.
Keep your court vibes fresh with funny basketball puns that never miss the rim. Perfect for fans who love to laugh.
Toda la información en el enlace – п»їhttps://basketballpuns.com/
Wishing you lots of punchlines!
register with 1win website https://1win13.com.ng/ .
I always look forward to reading your posts, they never fail to brighten my day and educate me in some way Thank you!
I love how you incorporate personal stories and experiences into your posts It makes your content relatable and authentic
Their posts always leave us feeling informed and entertained. We’re big fans of their style and creativity.
Hi comedy enthusiasts!
Basketball food puns that are finger-lickin’ funny. puns funny basketball jokes Perfect for snack time, game time, or pun time.
Get cheesy with basketball food puns that serve flavor and fun. Perfect for parties, posts, or pregame snacks.
Toda la información en el enlace – п»їhttps://basketballpuns.com/
Here’s to plenty of comic brilliance!
http://zithpharmonline.com/# zithromax 250mg
1win login nigeria https://1win13.com.ng/ .
1вин rossvya https://www.1win6006.ru .
nervecalm s a high-quality nutritional supplement crafted to promote nerve wellness, ease chronic discomfort, and boost everyday vitality.
prostavive maintaining prostate health is crucial for men’s overall wellness, especially as they grow older.
prodentim a groundbreaking probiotic supplement uniquely designed to support oral health and promote robust gums and teeth.
Clom Fast Pharm: where to buy generic clomid without insurance – Clom Fast Pharm
1win скачать последнюю версию 1win6006.ru .
https://lisinexpress.shop/# Lisin Express
1win aplicația http://1win5011.ru/ .
Enhance your vehicle into a work of art with our experienced car modification offerings. At Bergin Auto Body, we specialize in offering premium customizations that display your individual flair. From stylish body kits to dynamic motor enhancements, our crew ensures excellent workmanship. Learn more at our webpage https://berginautobody.com/ to learn about our packages and kick off your vehicle’s transformation now.
zithromax buy online: ZithPharmOnline – zithromax capsules
Lisin Express: price lisinopril 20 mg – Lisin Express
1win. casino. https://1win1001.top .
guvenilir casino siteleri: canlД± casino bonusu veren siteler – lisansl? casino siteleri casinositeleri1st.com
1вин https://www.1win6042.ru .
1win online casino https://www.1win1001.top .
мостбет chrono http://mostbet6032.ru/ .
Статья помогает читателю получить полное представление о проблеме, рассматривая ее с разных сторон.
mostbet kg отзывы https://mostbet6031.ru/ .
deneme bonusu veren siteler: casino siteleri – gercek para kazandД±ran casino oyunlarД± casinositeleri1st.com
мрстбет mostbet6033.ru .
win 1 win 1 .
скачать мостбет mostbet6032.ru .
prostavive maintaining prostate health is crucial for men’s overall wellness, especially as they grow older.
Hey pun appreciators!
You don’t need a playbook to enjoy these basketball pun one liners. short basketball puns They’re easy to remember and impossible not to love.
Funny basketball puns that will make your group chat erupt like a crowd after a half-court swish.
Toda la información en el enlace – п»їhttps://www.machill.jp/machida_zakka2023/#comment-125624
Here’s to plenty of laugh-out-louds!
sweet bonanza giris: sweet bonanza oyna – sweet bonanza demo sweetbonanza1st.shop
cazinouri online moldova https://1win5011.ru/ .
mostbet скачать на телефон бесплатно андроид https://mostbet6031.ru/ .
1wi. 1win6043.ru .
mostbet kg скачать на андроид http://mostbet6033.ru .
sweet bonanza 1st: sweet bonanza oyna – sweet bonanza 1st sweetbonanza1st.shop
1win ng https://1win14.com.ng/ .
casino siteleri 2024: casibom giris – ilk Гјyelik deneme bonusu veren siteler casibom1st.com
мостбет казино http://www.mostbet6012.ru .
1win online games http://1win14.com.ng/ .
This post came at just the right time for me Your words have provided me with much-needed motivation and inspiration Thank you
Your blog post had me hooked from the first sentence.
Your writing is so eloquent and engaging You have a gift for connecting with your readers and making us feel understood
It’s clear that you truly care about your readers and want to make a positive impact on their lives Thank you for all that you do
casino siteleri: kazino online – lisansl? casino siteleri casinositeleri1st.com
1win ru 1win ru .
jocuri de noroc online moldova jocuri de noroc online moldova .
Για διασκέδαση και κέρδη στην Ελλάδα επισκεφθείτε το kingmakercasino.gr που προσφέρει μοναδικές εμπειρίες παιχνιδιού.
sweet bonanza: sweet bonanza – sweet bonanza slot sweetbonanza1st.shop
1win http://www.1win5012.ru .
nerve calm is a high-quality nutritional supplement crafted to promote nerve wellness, ease chronic discomfort, and boost everyday vitality.
?Hola participantes de casino
Un casino sin licencia en EspaГ±a te permite jugar desde cualquier dispositivo sin necesidad de instalar aplicaciones adicionales.
Plataformas de apuestas sin licencia aceptan criptomonedas y mГ©todos alternativos de pago. Esto las convierte en una opciГіn moderna y conveniente.
Mas detalles en el enlace – п»їhttps://casinossinlicenciaenespana.guru/
?Que tengas excelentes exitos!
мастбет http://www.mostbet6011.ru .
canlД± oyunlar: casibom 1st – cazinomaxi casibom1st.com
Hidden Link Placement in Established Content Hubs
Hello! If you’re reading this, chances are you’re looking for a way to boost your website’s visibility in Google. I get it — SEO can feel overwhelming, especially with so many “instant results” offers out there vowing overnight success without real outcomes. That’s why I want to share my strategy with you. It’s not just another cookie-cutter service — it’s a bespoke approach designed to deliver real, measurable results.
I specialize in building backlink structures that combine Tier 1, Tier 2, and Tier 3 backlinks. Picture creating a reliable framework for your project. Without a solid base, everything else crumbles. My goal is to boost your primary domain’s credibility in a way that aligns with search engine algorithms and proves effective.
Why Should You Trust Me?
Let me be honest here: I’ve been in the search engine optimization industry for years, and I’ve witnessed every trend — ethical practices and black-hat tactics. I’ve worked with clients who invested heavily on services that vowed top positions but caused ranking drops. That’s why I decided to redefine the process.
I focus on high-quality, dofollow backlinks from trusted domains. Over 80% of Tier 1 links in my strategy are dofollow because they pack the biggest punch. And here’s the kicker — you’ll get this premium service at significantly reduced rates (costing just 200–350 USD). Why pay more for less? Protect your budget ?? in something that guarantees progress.
What Makes My Approach Different?
Elite Guest Blogging
I avoid low-quality directories. Nope. I handpick only the authoritative domains — platforms with strong domain authority (DA). These are the kinds of sites that elevate your domain’s credibility.
Tailored Copywriting
Low-quality writing harms credibility. It’s detrimental to your brand. That’s why every post I create is 100% unique, captivating, and customized for your industry. Whether it’s for content hubs, I guarantee Copyscape-passed content that blends seamlessly into your campaign. Pure quality, zero filler — content that converts.
Pyramid-Structured Backlinks
Here’s where things get strategic. My method goes beyond basics by incorporating Tier 2 and Tier 3 support links. This multi-phase strategy amplifies the power of your main connections, driving long-term success for your money site. Picture compounding momentum, growing exponentially.
Varied Backlink Portfolio
Search engines reward variety, so I incorporate diverse high-authority sources: content hubs, document shares, social signals. This isn’t about gaming the system; it’s about establishing long-term authority.
Full Transparency
When you work with me, you’ll see every detail. I provide a thorough documentation, including full administrative rights. Full disclosure at every step. You’ll know exactly where your links are coming from and their role in your success.
A Client Success Tale
A case study: A few years ago, I worked with a client who was struggling to gain traction despite countless strategies. They’d tried multiple agencies, but results were elusive. When they came to me, I crafted a custom plan. Together, we built a custom link pyramid tailored to their niche. Soon, rankings climbed, and they achieved measurable sales growth. That’s the kind of result I aim for with every client.
Let’s build your path to the top Contact me now and let’s make Google work for you. ??
¡Hola exploradores del juego
El casino sin licencia en EspaГ±a es una opciГіn cada vez mГЎs comГєn entre los jugadores experimentados. Permite mГЎs anonimato y menos verificaciГіn. https://casinossinlicenciaenespana.guru AsegГєrate de elegir sitios con buena reputaciГіn.
Una licencia de juego alternativa puede incluir requisitos de transparencia y auditorГa. No todas son iguales, asГ que infГіrmate sobre su autoridad emisora. Algunos organismos son mГЎs estrictos que otros.
Consulta el enlace para más información – п»їhttps://casinossinlicenciaenespana.guru/
¡Por muchos sonrisas!
Your blog always puts a smile on my face and makes me feel better about the world Thank you for being a source of light and positivity
It’s always a joy to stumble upon content that genuinely makes an impact and leaves you feeling inspired. Keep up the great work!
?Hola jugadores
La licencia de juego internacional actГєa como garantГa de que el operador cumple ciertos estГЎndares. plataforma de apuestas sin licencia Aunque no sea espaГ±ola, puede indicar fiabilidad. InfГіrmate sobre las entidades que otorgan esas licencias.
La licencia de juego emitida por Curazao es comГєn entre los casinos sin licencia en EspaГ±a. Aunque mГЎs flexible, sigue ciertos estГЎndares. Consulta si el operador estГЎ listado en su web oficial.
Mas detalles en el enlace – п»їhttp://casinossinlicenciaenespana.guru
?Que tengas excelentes slots!
1вин вход с компьютера 1win6043.ru .
Good day! This is kind of off topic but I need some advice from an established blog. Is it difficult to set up your own blog? I’m not very techincal but I can figure things out pretty fast. I’m thinking about making my own but I’m not sure where to begin. Do you have any tips or suggestions? With thanks
Magnificent website. A lot of helpful information here. I’m sending it to some pals ans additionally sharing in delicious. And of course, thank you on your sweat!
Παίξτε στο Kingmaker Casino στην Ελλάδα! Καζίνο Kingmaker διαθέτει τα καλύτερα παιχνίδια καζίνο.
I don’t know if it’s just me or if everybody else experiencing problems with your website. It appears like some of the written text in your content are running off the screen. Can someone else please provide feedback and let me know if this is happening to them too? This may be a issue with my web browser because I’ve had this happen before. Thank you
sweet bonanza: sweet bonanza oyna – sweet bonanza giris sweetbonanza1st.shop
1win ru https://www.1win6009.ru .
1вин про https://www.1win6043.ru .
sweet bonanza siteleri: sweet bonanza yorumlar – sweet bonanza yorumlar sweetbonanza1st.shop
kush shop in prague cali weed delivery in prague
Έχω βρει καταπληκτικό το Nomini Casino στην Ελλάδα. Επισκεφθείτε το Nomini Casino για να απολαύσετε μια μοναδική εμπειρία τυχερών παιχνιδιών.
Your writing is so eloquent and heartfelt It’s impossible not to be moved by your words Thank you for sharing your gift with the world
Wow, I had never thought about it in that way before You have really opened my eyes to a new perspective Keep up the great work!
I always find myself nodding along and agreeing with your wise words Your insights and advice are truly valuable
sweet bonanza: sweet bonanza siteleri – sweet bonanza giris sweetbonanza1st.shop
Ψάχνετε για πληροφορίες σχετικά με το Casinoly στην Ελλάδα στην Ελλάδα; Επισκεφθείτε τον επίσημο ιστότοπο
Этот информативный материал предлагает содержательную информацию по множеству задач и вопросов. Мы призываем вас исследовать различные идеи и факты, обобщая их для более глубокого понимания. Наша цель — сделать обучение доступным и увлекательным.
Подробнее тут – https://mednarkoforum.ru/
Επισκεφτείτε το BoaBoa Ελλάδα και ζήστε την εμπειρία του τζόγου στην Ελλάδα
mostbet игры http://www.mostbet6012.ru .
Витебский госуниверситет университет https://vsu.by/inostrannym-abiturientam/spetsialnosti.html П.М.Машерова – образовательный центр. Вуз является ведущим образовательным, научным и культурным центром Витебской области. ВГУ осуществляет подготовку: химия, биология, история, физика, программирование, педагогика, психология, математика.
1win mobil tətbiqi ilə hər yerdə oyun oynamaq mümkündür | 1win az saytında müxtəlif turnirlərdə iştirak edin | 1win kazino oyunlarında müxtəlif bonuslar əldə edin | 1win platformasında istifadəçilər üçün müxtəlif bonuslar təqdim olunur1win az saytında müxtəlif ödəniş üsulları mövcuddur | 1win azərbaycan saytında istifadəçilər üçün müxtəlif təlimatlar mövcuddur1win mobil tətbiqi ilə istənilən yerdə oyun oynayın | 1win platformasında istifadəçilər üçün müxtəlif təkliflər mövcuddur | 1win az saytında müxtəlif promosyonlar mövcuddur | 1win platformasında istifadəçilər üçün müxtəlif bonuslar təqdim olunur | 1win-də müxtəlif idman növlərinə mərc edin http://1wincasino-azn.com/.
guvenilir casino siteleri: deneme bonusu veren siteler – deneme bonusu veren siteler casinositeleri1st.com
Online casino for people
Online Casino “Know This”: Secure, Rapid, and User-Centric**
No fluff—just the facts you care about.*
—
Why Gamblers Choose It
– Licensed & Fair: Certified by Malta MGA and UKGC. Decentralized tech verifies all results.
– Lightning Payouts: Crypto transactions in seconds, bank transfers/fiat settled in a day.
Top Perks
– Unique Games: Live dealer hits like Lightning Roulette, proprietary slots such as Crypto Quest.
– Rewards Galore: 200 free spins for newcomers, regular cashback rewards for returning users.
—
Play Anywhere
Quick-launch feature, tailored alerts for big wins, and a sleek, intuitive app.
Verified Feedback**
– “Cashed out $4k in 2 hours—no red tape.”* – a verified user
– “Support staff remembered my details. 10/10.”* – a loyal member
Stay in Control
– 24/7 Human Assistance: Chat with a human anytime.
– Customize Limits**: Deposit caps and breaks built into the system.
Start Now
Register quickly, use code **KNOWTHIS** for complimentary rounds.
P.S. Gamble wisely. Always define your spending limit.
1-win https://1win6046.ru .
sweet bonanza yorumlar: sweet bonanza siteleri – sweet bonanza oyna sweetbonanza1st.shop
usa mexico pharmacy: Us Mex Pharm – certified Mexican pharmacy
Your blog post had me hooked from the very beginning!
It’s clear that you are passionate about making a positive impact and your blog is a testament to that Thank you for all that you do
This is one of my go-to blogs for inspiration Whether it’s fashion, travel, or self-improvement, you cover it all flawlessly
I appreciate how well-researched and informative each post is It’s obvious how much effort you put into your work
Я хотел бы поблагодарить автора этой статьи за его основательное исследование и глубокий анализ. Он представил информацию с обширной перспективой и помог мне увидеть рассматриваемую тему с новой стороны. Очень впечатляюще!
Mexican pharmacy ship to USA: USMexPharm – Mexican pharmacy ship to USA
UsMex Pharm: Mexican pharmacy ship to USA – certified Mexican pharmacy
leptozan is an innovative weight loss formula crafted to help you naturally sculpt the body you’ve always desired.
nerve calm is a high-quality nutritional supplement crafted to promote nerve wellness, ease chronic discomfort, and boost everyday vitality.
Us Mex Pharm: USMexPharm – certified Mexican pharmacy
Mexican pharmacy ship to USA: Mexican pharmacy ship to USA – mexican pharmacy
https://usmexpharm.com/# buying prescription drugs in mexico
1вин официальный мобильная 1вин официальный мобильная .
It’s always a joy to stumble upon content that genuinely makes an impact and leaves you feeling inspired. Keep up the great work!
Your blog has become a part of my daily routine Your words have a way of brightening up my day and lifting my spirits
Your blog posts never fail to entertain and educate me. I especially enjoyed the recent one about [insert topic]. Keep up the great work!
Your blog is a place I come to when I need a boost of positivity It’s like a warm hug from a friend Thank you for being that friend
Your posts are always so well-written and thought out It’s evident that you put a lot of effort into each and every one
I have been following your blog for a while now and have to say I am always impressed by the quality and depth of your content Keep it up!
mexican pharmacy: UsMex Pharm – Us Mex Pharm
mexico drug stores pharmacies buying prescription drugs in mexico usa mexico pharmacy
игра 1вин https://1win6047.ru/ .
USMexPharm: usa mexico pharmacy – UsMex Pharm
https://usmexpharm.com/# certified Mexican pharmacy
buying prescription drugs in mexico online: usa mexico pharmacy – Mexican pharmacy ship to USA
Us Mex Pharm: usa mexico pharmacy – Mexican pharmacy ship to USA
Купить диплом любого университета!
Заказать диплом университета по доступной цене возможно, обращаясь к проверенной специализированной компании. Купить диплом: diplomskiy.com/registratsiya-diploma-v-reestre-ofitsialnaya-proverka
Hi there, just became alert to your blog through Google, and found that it is really informative. I am gonna watch out for brussels. I’ll appreciate if you continue this in future. Lots of people will be benefited from your writing. Cheers!
certified Mexican pharmacy: Mexican pharmacy ship to USA – certified Mexican pharmacy
certified Mexican pharmacy: usa mexico pharmacy – mexican pharmacy
http://usmexpharm.com/# mexican pharmacy
Витебский университет П.М.Машерова https://vsu.by образовательный центр. Вуз является ведущим образовательным, научным и культурным центром Витебской области.
USMexPharm Mexican pharmacy ship to USA UsMex Pharm
mexican pharmacy: USMexPharm – USMexPharm
Статья содержит полезные факты и аргументы, которые помогают разобраться в сложной теме.
Mexican pharmacy ship to USA: mexican pharmacy – reputable mexican pharmacies online
https://usmexpharm.shop/# USMexPharm
Я хотел бы поблагодарить автора этой статьи за его основательное исследование и глубокий анализ. Он представил информацию с обширной перспективой и помог мне увидеть рассматриваемую тему с новой стороны. Очень впечатляюще!
Чеки для отчётности с нужной датой и суммой — удобно и быстро. | Помощь в срочной отчётности — действительно работает. | Работают официально, чеки фискальные. | Чеки в формате PDF, подходят для отчётности. | Качественные чеки без подделок. | Выгодно, особенно если нужен большой объём чеков. | Есть возможность заказа с НДС или без. | Подходит для командировочных и разовых отчётов. | Подходит для бизнеса и личных целей. | Лучшее решение для занятых предпринимателей. купить чеки с ндс.
cheapest online pharmacy india: п»їlegitimate online pharmacies india – USA India Pharm
I appreciate how this blog promotes self-love and self-care It’s important to prioritize our well-being and your blog reminds me of that
This blog is such a hidden gem I stumbled upon it by chance and now I’m completely hooked!
Thank you for sharing your personal experiences and stories It takes courage to open up and you do it with such grace and authenticity
Your writing is so eloquent and engaging You have a gift for connecting with your readers and making us feel understood
primebiome fosters a thriving gut microbiome, which contributes to improved skin clarity and a naturally youthful glow.
This is one of my go-to blogs for inspiration Whether it’s fashion, travel, or self-improvement, you cover it all flawlessly
This is exactly what I needed to read today Your words have given me a new perspective and renewed hope Thank you
?Hola fanaticos del casino
Casinos sin licencia de EspaГ±a destacan por ofrecer retiros instantГЎneos. casinossinlicenciaenespana No necesitas esperar dГas para cobrar tus ganancias. Verifica si hay lГmites semanales o mensuales.
El bono de bienvenida en casinos sin licencia puede ser mГЎs alto que en los regulados. Aprovecha estas promociones al registrarte.
Mas detalles en el enlace – п»їhttp://casinossinlicenciaenespana.guru
?Que tengas excelentes premios!
buy prescription drugs from india: UsaIndiaPharm – indian pharmacies safe
UsaIndiaPharm: UsaIndiaPharm – india online pharmacy
Don’t miss out on the AYCE weekend brunch buffet 12-4 p.m.
Hello, Neat post. There’s an issue together with your web site in internet explorer, would check this… IE nonetheless is the marketplace leader and a large portion of people will omit your magnificent writing due to this problem.
Stop by my webpage – https://Remstroygarant.com/uz_redirect.php?url=https://Yelharvey.com/@pam03777772852
Ищете уникальные товары?, наш сайт Camogear. Мы предлагаем разнообразные товары. Убедитесь сами, от лучших брендов. и не пропустите выгодные предложения. Качество и стиль – это наша цель. в Camogear.
одяг для військових одяг для військових .
USA India Pharm indian pharmacy paypal buy prescription drugs from india
Your honesty and vulnerability in sharing your personal experiences is truly admirable It takes courage to open up and I applaud you for it
Thank you for providing a positive and constructive space for discussion It’s refreshing to see a blog with a kind and respectful community
Looking forward to your next post. Keep up the good work!
This blog serves as a reminder to take care of our mental health and well-being Thank you for promoting a healthier and happier mindset
india pharmacy: UsaIndiaPharm – buy prescription drugs from india
аренда машины в сочи снять авто в аренду в сочи
buy medicines online in india: USA India Pharm – pharmacy website india
Fine way of explaining, and nice article to get data regarding my presentation focus, which i am going to deliver in academy.
Регистрация прошла легко и просто. Интерфейс сайта rox casino очень понятный. Хорошие шансы на выигрыш в популярных играх. Можно играть с минимальными ставками. Платежи защищены и проходят моментально. Rox casino — приятный и честный сервис. Зеркало 1429 подключилось сразу. Много положительных эмоций от игры. Rox — отличный выбор в 2024 году https://casino-rox.ru/.
Я благодарен автору этой статьи за его способность представить сложные концепции в доступной форме. Он использовал ясный и простой язык, что помогло мне легко усвоить материал. Большое спасибо за такое понятное изложение!
online pharmacy india: UsaIndiaPharm – UsaIndiaPharm
MetaMask Chrome simplifies NFT purchases. Connecting to OpenSea and other marketplaces is seamless and secure.
Ищете надежный ремонт бытовой техники Bosch в Москве? Наш сервисный центр готов помочь. Восстанавливаем работоспособность стиральных машин, холодильников, посудомоечных машин, духовых шкафов, кофемашин и другой техники Bosch. Гарантируем качественное восстановление вашей техники с использованием фирменных деталей и проверенных методик. Ремонт осуществляется как на дому у клиента, так и в нашей мастерской. Доверьте ремонт вашего оборудования профессионалам. Заказать ремонт посудомоечных машин bosch в москве и получите качественный сервис.
снять авто в аренду в москве снять авто в аренду в москве
top 10 pharmacies in india: USA India Pharm – UsaIndiaPharm
pharmacy website india: USA India Pharm – UsaIndiaPharm
Hey very cool web site!! Guy .. Beautiful .. Wonderful .. I’ll bookmark your site and take the feeds also? I am happy to seek out so many useful info here within the submit, we’d like work out extra strategies in this regard, thank you for sharing. . . . . .
Natyazhnye потолки в Днепре , где современные решения становятся реальностью, обновите свой дом, инвестируйте в красоту и комфорт.
Элегантные натяжные потолки для вашего дома, качественные материалы, которые сделают ваш интерьер уникальным, узнайте больше на сайте.
Экономьте с умом с натяжными потолками, по доступным ценам, придайте вашему интерьеру свежесть, закажите бесплатную консультацию.
Натяжные потолки, созданные с любовью, потолки, которые вдохновляют, создайте уникальный стиль, машина времени в мир красоты.
Выбор натяжных потолков для любого стиля, отечественного производства, всё для вашего удобства, выбор по вашему желанию.
Почему стоит выбрать натяжные потолки?, для вашего дома, долговечность и надежность, инвестируйте в качество.
Творческие идеи для натяжных потолков, всё на natyazhnye-potolki-dnepr.biz.ua, создайте уникальное пространство, мы поможем вам с выбором.
Современные технологии натяжных потолков, в Днепре и за его пределами, доступные решения для каждого, свой идеальный потолок в 3 шага.
Создайте уют с натяжными потолками, с многолетним опытом на рынке, мы знаем, как сделать ваш потолок идеальным, вдохните жизнь в ваше пространство.
Натяжные потолки по доступным ценам, у надежных поставщиков, стиль, качество и цена — все в одном месте, закажите натяжные потолки и наслаждайтесь результатом.
Натяжные потолки: быстро и стильно, с качеством, проверенным временем, всегда профессионально, начните свой проект с нами.
Натяжные потолки для каждого интерьера, доступные на natyazhnye-potolki-dnepr.biz.ua, выбор, который вдохновляет, закажите консультацию.
Ваш надежный партнер в мире натяжных потолков, где качество не подвело ни разу, долговечность и стиль, сделайте свой выбор с умом.
Эстетика и функциональность натяжных потолков, от natyazhnye-potolki-dnepr.biz.ua, выбор, который вас удивит, узнайте больше на нашем сайте.
Эстетика натяжных потолков для вашего дома, где мечты становятся реальностью, поддержка профессионалов на каждом этапе, закажите прямо сейчас.
Дайте своему потолку вторую жизнь, от надежных производителей, мы создаем счастье для ваших глаз, сделайте правильный выбор.
установка натяжных потолков https://natyazhnye-potolki-dnepr.biz.ua/ .
Spot on with this write-up, I honestly believe that this amazing site needs a great deal more attention. I’ll probably be back again to see more, thanks for the info!
Your ideas and insights are unique and thought-provoking I appreciate how you challenge your readers to see things from a different perspective
Love this appreciation for great content
I’ve learned so much from this blog and have implemented many of the tips and advice into my daily routine Thank you for sharing your knowledge!
I appreciate how well-researched and informative each post is It’s obvious how much effort you put into your work
Your writing is so relatable and down-to-earth It’s like having a conversation with a good friend Thank you for always being real with your readers
Your blog is an oasis in a world filled with negativity and hate Thank you for providing a safe space for your readers to recharge and refuel
left ear mozart right ear chinese bible left eye
SISTEM TERPADU PAFI: Fungsi Penting Farmasi di Zaman Digital
Profil Singkat PAFI
Sejak kemerdekaan Indonesia, para Apoteker turut berperan aktif dalam pengembangan sistem kesehatan. Didirikannya organisasi profesi farmasi ini menjadi tonggak penting sebagai asosiasi di bidang farmasi. Berazaskan Pancasila, PAFI berkomitmen untuk:
• Meningkatkan derajat kesehatan masyarakat
• Menyempurnakan kefarmasian nasional
• Meningkatkan kondisi para anggota
WEB PAFI Terintegrasi: Solusi Digital untuk Dunia Farmasi Digital
Menyongsong revolusi digital, PAFI meluncurkan platform digital ini – solusi canggih yang memfasilitasi profesi kefarmasian melalui:
? Update Terbaru – Kemudahan mendapatkan kebijakan kesehatan, temuan terbaru, dan kesempatan profesional
? Pengembangan Kompetensi – Program kursus online bersertifikat
? Jaringan Ahli – Sarana kerjasama nasional
Platform ini memperkuat kontribusi PAFI dalam memajukan kesehatan nasional melalui adaptasi perkembangan teknologi.
Tantangan Dunia Farmasi Modern
Adanya WEB PAFI Terintegrasi menandai perubahan sistem dalam dunia kefarmasian. Dengan konsisten memutakhirkan kapabilitas sistem, PAFI berjanji untuk:
• Menggalakkan pembaruan layanan farmasi
• Memperkuat kualitas profesi
• Meningkatkan fasilitas kesehatan untuk rakyat
Kesimpulan
PAFI melalui WEB PAFI Terintegrasi konsisten memimpin dalam menghubungkan inovasi digital dengan pekerjaan apoteker. Terobosan ini bukan sekadar meningkatkan fungsi tenaga kefarmasian, tetapi juga berperan aktif bagi kemajuan kesehatan bangsa pada zaman teknologi.
Играть в pinko удобно с мобильного телефона. Удобный вход на pinko без блокировок. Регистрация в pinko занимает всего пару минут. pinko радует высокой скоростью загрузки. Казино пинко — легальный ресурс. pinko казино — стабильная площадка для ставок. Есть демо-режим в слотах на pinko. pinko даёт приветственный бонус новым игрокам. На pinko часто дарят фриспины pinko бонус.
best india pharmacy: indian pharmacy online – UsaIndiaPharm
прокат спортивных авто аренда авто без ограничений
аренда машины спб цена аренда автомобиля на месяц спб
indian pharmacy: USA India Pharm – reputable indian online pharmacy
https://naveridbuy.exblog.jp/35878128/
USA India Pharm: buy medicines online in india – UsaIndiaPharm
Natyazhnye потолки в Днепре , где современные решения становятся реальностью, обновите свой дом, инвестируйте в красоту и комфорт.
Современные решения для потолков от natyazhnye-potolki-dnepr.biz.ua, качественные материалы, которые подчеркнут ваш стиль, закажите прямо сейчас.
Экономьте с умом с натяжными потолками, от natyazhnye-potolki-dnepr.biz.ua, придайте вашему интерьеру свежесть, закажите бесплатную консультацию.
Креативные решения для вашего интерьера, потолки, которые вдохновляют, создайте уникальный стиль, машина времени в мир красоты.
Выбор натяжных потолков для любого стиля, отечественного производства, всё для вашего удобства, у нас широкий ассортимент.
Преимущества натяжных потолков, для вашего комфорта, отличная шумоизоляция, позаботьтесь о своем жилье.
Как выбрать идеальный натяжной потолок?, где стиль и качество соединяются, превратите потолок в произведение искусства, наш опыт к вашим услугам.
Секреты успешного выбора потолка, от natyazhnye-potolki-dnepr.biz.ua, доступные решения для каждого, выбор только за вами.
Натяжные потолки от профессионалов, от natyazhnye-potolki-dnepr.biz.ua, мы знаем, как сделать ваш потолок идеальным, вдохните жизнь в ваше пространство.
Натяжные потолки по доступным ценам, на natyazhnye-potolki-dnepr.biz.ua, где ваши мечты становятся реальностью, позвоните нам сегодня.
Натяжные потолки: быстро и стильно, в Днепре, нам доверяют тысячи клиентов, начните свой проект с нами.
Натяжные потолки для каждого интерьера, где стиль встречается с практичностью, качество и надежность, обратите внимание на наши предложения.
Мы создаем идеальные потолки для вас, где качество не подвело ни разу, долговечность и стиль, сделайте свой выбор с умом.
Эстетика и функциональность натяжных потолков, с заботой о каждом клиенте, всё для вашего комфорта и стиля, действуйте сейчас.
Натяжные потолки: от замысла до реализации, потолки для любого стиля, долговечные и стильные решения, воспользуйтесь нашим опытом.
Дайте своему потолку вторую жизнь, от natyazhnye-potolki-dnepr.biz.ua, всё для вашего комфорта, сделайте правильный выбор.
потолки натяжные https://natyazhnye-potolki-dnepr.biz.ua/ .
UsaIndiaPharm: online pharmacy india – top 10 pharmacies in india
As someone who struggles with mental health, I appreciate the support and empathy displayed in your blog It means a lot to know I’m not alone
This blog serves as a reminder to take care of our mental health and well-being Thank you for promoting a healthier and happier mindset
This blog serves as a reminder to take care of our mental health and well-being Thank you for promoting a healthier and happier mindset
You have a way of explaining complex topics in a straightforward and easy to understand manner Your posts are always a pleasure to read
Your blog is an oasis in a world filled with negativity and hate Thank you for providing a safe space for your readers to recharge and refuel
Your content always keeps me coming back for more!
I have been following your blog for a while now and have to say I am always impressed by the quality and depth of your content Keep it up!
demo pg slot
WEB PAFI TERINTEGRASI: Kontribusi Utama Farmasi di Dunia Digital
Profil Singkat PAFI
Sejak kemerdekaan Indonesia, para Ahli Farmasi aktif berkontribusi dalam pengembangan sistem kesehatan. Berdirinya organisasi profesi farmasi ini menjadi tonggak penting sebagai asosiasi di bidang farmasi. Berlandaskan Pancasila, PAFI bersumpah untuk:
• Mengembangkan taraf kesehatan rakyat
• Mengembangkan bidang farmasi di Tanah Air
• Menunjang kesejahteraan anggota
Platform Terpadu PAFI: Terobosan Modern untuk Dunia Farmasi Digital
Menjawab kebutuhan digital, PAFI meluncurkan WEB PAFI Terintegrasi – platform inovatif yang menunjang profesi kefarmasian melalui:
? Update Terbaru – Kemudahan mendapatkan peraturan farmasi, temuan terbaru, dan prospek pekerjaan
? Peningkatan Kemampuan – Layanan pelatihan dan sertifikasi daring
? Jaringan Ahli – Wadah kolaborasi se-Indonesia
Platform ini meningkatkan peran PAFI dalam memajukan kesehatan nasional melalui penerapan inovasi digital.
Masa Depan Kefarmasian Era Digital
Hadirnya platform digital PAFI menandai perubahan sistem dalam dunia kefarmasian. Dengan terus mengembangkan fitur dan layanan, PAFI berjanji untuk:
• Mendorong pembaruan layanan farmasi
• Memperkuat standar profesional
• Meningkatkan akses kesehatan masyarakat
Epilog
PAFI berkat sistem terpadu ini terus menjadi pionir dalam menjembatani perkembangan teknis dengan pekerjaan apoteker. Inisiatif ini tidak hanya memperkuat peran tenaga kefarmasian, tetapi juga memberikan sumbangsih konkret bagi peningkatan kesehatan nasional di masa modern.
ремонт аристон servis-ariston-moskva.ru
п»їlegitimate online pharmacies india: cheapest online pharmacy india – UsaIndiaPharm
В Pinco легко пройти регистрацию и сразу получить бонус. Pinco предлагает интересные слоты и ставки на спорт. Регистрируйтесь в pinco и получайте щедрый приветственный бонус. В казино pinco часто проходят выгодные турниры. Играть в pinco можно с минимальными ставками — отличный вариант для новичков. Pinco часто обновляет свой каталог игр — всегда интересно. Казино pinco — это безопасность и качество. На pinco можно играть в любое время суток. Pinco регулярно дарит фриспины и бонусы пинко казино Кыргызстан.
Right here is the right blog for anybody who really wants to understand this topic. You know a whole lot its almost tough to argue with you (not that I personally would want to…HaHa). You definitely put a new spin on a topic that’s been discussed for many years. Great stuff, just great.
UsaIndiaPharm: UsaIndiaPharm – mail order pharmacy india
pg slot
WEB PAFI TERINTEGRASI: Kontribusi Utama Farmasi di Dunia Digital
Mengenal PAFI
Sejak kemerdekaan Indonesia, para Ahli Farmasi memberikan andil dalam kemajuan kesehatan bangsa. Kehadiran Persatuan Ahli Farmasi Indonesia (PAFI) menjadi tonggak penting sebagai wadah profesional di bidang farmasi. Berlandaskan Pancasila, PAFI berkomitmen untuk:
• Mengembangkan kualitas kesehatan publik
• Menyempurnakan farmasi Indonesia
• Menunjang kondisi para anggota
Platform Terpadu PAFI: Inovasi Teknologi untuk Farmasi Modern
Menjawab kebutuhan digital, PAFI memperkenalkan sistem terintegrasi ini – terobosan teknologi yang mendukung pekerjaan apoteker melalui:
? Data Real-time – Kemudahan mendapatkan kebijakan kesehatan, perkembangan ilmiah, dan peluang karir
? Pelatihan Profesional – Fasilitas pembelajaran jarak jauh
? Jaringan Ahli – Media sinergi nasional
Sistem digital ini memperkuat kontribusi PAFI dalam memajukan sistem kesehatan melalui penerapan inovasi digital.
Tantangan Kefarmasian Era Digital
Keberadaan sistem terintegrasi ini merupakan tanda transformasi digital dalam bidang apoteker. Dengan selalu menyempurnakan kapabilitas sistem, PAFI bertekad untuk:
• Mendorong inovasi pelayanan kefarmasian
• Memperkuat standar profesional
• Mempermudah pelayanan kesehatan publik
Kesimpulan
PAFI berkat WEB PAFI Terintegrasi terus menjadi pionir dalam menjembatani inovasi digital dengan dunia kefarmasian. Program ini bukan sekadar mengokohkan posisi apoteker, tetapi juga memberikan sumbangsih konkret bagi peningkatan kesehatan nasional pada zaman teknologi.
UsaIndiaPharm: USA India Pharm – online pharmacy india
Transform your machine into a treasure with our qualified vehicle modification packages. At Bergin Auto Services, we focus in supplying premium upgrades that demonstrate your one-of-a-kind preference. From chic car exteriors to efficient powertrain improvements, our professionals provides remarkable craftsmanship. Discover our internet page https://allisonsautobody.com/ to explore our packages and commence your ride’s metamorphosis at once.
https://usaindiapharm.shop/# UsaIndiaPharm
сервисный центр аристон в москве ремонт ariston
UsaIndiaPharm: USA India Pharm – top online pharmacy india
2025年NBA免費線上看直播:籃球投注與即時更新的完整指南
隨著全球體育迷對線上博弈和賽事直播的需求不斷增長,NBA作為最受歡迎的籃球聯賽之一,自然成為了眾多球迷關注的焦點。2025年的NBA賽季將帶來更多精采的比賽,而如何免費觀看這些比賽並參與場中投注,已成為球迷們最關心的話題。本文將為您提供完整的NBA免費線上看直播教學、即時比分更新、以及相關的投注技巧。
一、NBA免費線上看直播的管道
不論是季後賽(4月-5月)還是總決賽(6月),NBA的每一場比賽都充滿激情與挑戰。以下是幾種常見的免費直播方式:
1. 線上直播平台
OB體育電視台 、鑫寶體育電視台 、SUPER體育電視台 等平台提供免費註冊服務,新用戶還可獲得168預測金,讓您在觀看比賽的同時也能進行運彩投注。
只需簡單註冊帳號,選擇【熊貓體育】或【RG富遊體育電視台】,即可輕鬆進入NBA籃球LIVE直播。
2. 電視轉播頻道
華視NBA籃球頻道 、ELTA TV 、以及中華電信MOD 也提供64場全賽事的LIVE轉播,適合喜歡透過電視欣賞比賽的球迷。
如果您偏好手機觀看,可以訂閱Hami Video NBA專區 ,每月僅需149元即可享受所有賽事的高清轉播。
二、如何註冊/登入以免費觀看NBA直播?
如果您想通過線上平台觀看NBA直播,以下是詳細步驟:
點選【RG官網】或【富遊娛樂城】官網,選擇「註冊/登入」。
輸入會員資料完成註冊。
登入後,點選【熊貓體育】或【體育直播】分類。
選擇NBA籃球視頻直播,即可免費觀看您感興趣的比賽。
三、NBA即時比分與場中投注
對於熱衷於運動彩券的球迷來說,NBA不僅是一場視覺盛宴,更是投注的好時機。以下是一些實用的投注建議:
即時比分更新 :透過【RG富遊體育電視台】或【熊貓體育】,您可以隨時掌握比賽進展,並根據比分變化調整投注策略。
場中投注技巧 :例如,在比賽關鍵時刻(如延長賽或最後三分鐘),利用即時數據進行快速下注,往往能提高勝率。
此外,NBA季後賽和總決賽期間,各平台通常會推出特別優惠活動,例如加倍獎金或贈送預測金,讓您的投注更有趣味性。
四、其他熱門賽事推薦
除了NBA之外,2025年還有許多值得期待的體育盛事:
2024夏季奧運 :涵蓋多項運動項目,是體育迷不容錯過的國際賽事。
2024歐洲盃 :足球迷的年度盛宴,各國勁旅爭奪最高榮譽。
2024 WBC世界棒球經典賽 :棒球愛好者的狂歡節,亞洲強隊表現備受矚目。
2023-2024英超聯賽 :足球迷必追的頂級聯賽,精彩程度無與倫比。
五、結語
無論您是單純的NBA球迷,還是熱衷於運動彩券投注的玩家,2025年的NBA賽季都將為您帶來無限樂趣。透過本文介紹的免費直播管道與投注技巧,您可以輕鬆享受每場比賽的刺激與精彩。現在就趕快註冊帳號,加入這場籃球狂歡吧!
立即行動!登入【熊貓體育】或【RG富遊體育電視台】,開啟您的NBA免費線上看之旅!
сервис ariston ремонт ariston
https://usacanadapharm.shop/# USACanadaPharm
usa canada pharm: canadian pharmacy ed medications – canada pharmacy online
Let us know in the comments which of their posts has resonated with you the most.
Your blog stands out in a sea of generic and formulaic content Your unique voice and perspective are what keep me coming back for more
тревожная кнопка охрана тревожная кнопка охрана .
Your blog is a treasure trove of wisdom and positivity I appreciate how you always seem to know just what your readers need to hear
https://usacanadapharm.shop/# USACanadaPharm
canadian pharmacy oxycodone: USACanadaPharm – usa canada pharm
Howdy! This post couldn’t be written much better! Reading through this article reminds me of my previous roommate! He always kept talking about this. I most certainly will send this information to him. Fairly certain he’s going to have a good read. Thank you for sharing!
тревожная кнопка охрана росгвардия тревожная кнопка охрана росгвардия .
usa canada pharm: canada drug pharmacy – best canadian online pharmacy
http://usacanadapharm.com/# canadian pharmacy 24h com safe
Мы предлагаем дипломы любой профессии по приятным тарифам.
Вы приобретаете документ в надежной и проверенной компании. Заказать диплом о высшем образовании– http://socialsmerch.com/read-blog/16192_vozmozhno-li-razumno-priobresti-dlya-sebya-dokumenty-ob-obuchenii-segodnya.html/ – socialsmerch.com/read-blog/16192_vozmozhno-li-razumno-priobresti-dlya-sebya-dokumenty-ob-obuchenii-segodnya.html
Святки
Святки
arrowplate
quasi-devoted
Ilwaco
Stylosanthes
subepithelial
MetaMask Download made easy! Setting up a wallet takes minutes, and it’s perfect for managing Ethereum and NFTs effortlessly.
Для эффективного продвижения по карьерной лестнице потребуется наличие диплома о высшем образовании. Заказать диплом института у надежной компании: diplomass.com/kupit-diplom-meditsinskoj-sestri-bistro-i-vigodno/
usa canada pharm: usa canada pharm – canadian discount pharmacy
Excellent web site. A lot of useful info here. I am sending it to a few pals ans also sharing in delicious. And obviously, thanks in your effort!
my site :: http://forum.cybersecureindia.in/viewtopic.php?id=292691
canada drugstore pharmacy rx: canadian pharmacy 365 – buy canadian drugs
clock radio with remote best clock radio with bluetooth
best canadian online pharmacy http://usacanadapharm.com/# pharmacy wholesalers canada
canadian mail order pharmacy
mitolyn is an advanced nutritional solution specifically created to help maintain balanced blood sugar levels and improve metabolic performance.
mitolyn is an advanced nutritional solution specifically created to help maintain balanced blood sugar levels and improve metabolic performance.
pokračovat v tom, abyste vedli ostatní.|Byl jsem velmi šťastný, že jsem objevil tuto webovou stránku. Musím vám poděkovat za váš čas
The convenient https://www.booking-zabljak.com service will help you find the perfect hotel for car travelers and active holiday lovers. A wide range of accommodation: from cozy guest houses to modern hotels with parking, Wi-Fi and breakfast. Book in advance and relax in comfort in the heart of Montenegro!
Я хотел бы выразить свою восторженность этой статьей! Она не только информативна, но и вдохновляет меня на дальнейшее изучение темы. Автор сумел передать свою страсть и знания, что делает эту статью поистине уникальной.
en uygun toptan poğaçaya byganaj.com üzerinden ulaşabilirsiniz.
The best online slots rise of olympus in one place: classics, new releases, jackpots and themed machines. Play without registration, test the demo or make real bets with bonuses.
Профессиональное агентство prvitruvio.ru: разработка рекламы, брендинг, digital-маркетинг, наружка и SMM. Комплексное продвижение для бизнеса любого масштаба.
en uygun goodday vitaminlerine vitaminsan.com dan ulaşabilirsiniz.
Приобрести диплом университета по невысокой стоимости вы сможете, обращаясь к надежной специализированной фирме. Купить документ о получении высшего образования вы имеете возможность в нашем сервисе. kupitediplom0027.ru/kupit-diplom-yurista-s-zaneseniem-v-reestr-5
Заказ штор по индивидуальным меркам
пошив штор на заказ пошив штор на заказ .
Мы изготавливаем дипломы психологов, юристов, экономистов и других профессий по выгодным ценам. Стараемся поддерживать для заказчиков адекватную политику тарифов. Для нас очень важно, чтобы документы были доступны для большого количества граждан.
Покупка диплома, подтверждающего обучение в ВУЗе, – это выгодное решение. Купить диплом любого ВУЗа: zakaz-na-diplom.ru/kupit-diplom-srednee-obrazovanie-3/
Приобрести диплом института по доступной стоимости возможно, обращаясь к проверенной специализированной фирме. Заказать документ ВУЗа вы имеете возможность у нас. vacshidiplom.com/kupit-diplom-vuza-s-zaneseniem-v-reestr-bistro-i-nadezhno-8
Радует объективность статьи, автор старается представить информацию без сильной эмоциональной окраски.
Автор старается быть нейтральным, что помогает читателям лучше понять обсуждаемую тему.
купить диплом об образовании в спб rusdiplomm-orig.ru .
Статья предлагает читателям объективную информацию, подкрепленную проверенными источниками.
Премиальные шторы на заказ для вашего интерьера, индивидуальный подход.
Премиальные шторы на заказ, с гарантией качества.
Пошив штор по индивидуальному дизайну, по вашим размерам.
Лучшие ткани для штор на заказ, высокое качество материалов.
Пошив штор на заказ для кухни, под ваш вкус.
Индивидуальный дизайн штор, быстро и качественно.
Пошив штор для нестандартных окон, с учетом особенностей помещения.
Эксклюзивные шторы на заказ, по вашему желанию.
Классические шторы на заказ, с учетом светотени.
Создание штор для любого типа окна, от ведущих мастеров.
Креативные шторы на заказ, под любой интерьер.
Пошив штор по индивидуальному проекту, с доставкой по Москве и регионам.
Стильные шторы по вашему проекту, от ведущих дизайнеров.
Индивидуальный пошив штор на заказ, по вашему проекту.
Шторы на заказ с доставкой и монтажом, под ваш вкус.
Эксклюзивные ткани для пошива штор, по желанию клиента.
сшить шторы на заказ сшить шторы на заказ . Prokarniz
Пошив штор с индивидуальным дизайном
пошив штор на заказ пошив штор на заказ .
prostafense is a premium, doctor-crafted supplement formulated to maintain optimal prostate function, enhance urinary performance, and support overall male wellness.
It’s in fact very complex in this busy life to listen news on Television, therefore I just use web for that reason, and take the hottest news.
prostafense is a premium, doctor-crafted supplement formulated to maintain optimal prostate function, enhance urinary performance, and support overall male wellness.
Мастерская по пошиву штор
пошив штор на заказ пошив штор на заказ .
Сшить шторы на заказ по индивидуальному проекту, отличное качество.
Идеальные шторы по вашим размерам, по выгодной цене.
Создание штор мечты, под любой стиль.
Эксклюзивные шторы на заказ, по индивидуальному дизайну.
Пошив штор на заказ для кухни, с учетом модных трендов.
Профессиональный пошив штор по вашим размерам, под любой бюджет.
Пошив штор для нестандартных окон, с учетом особенностей помещения.
Шторы на заказ с уникальным дизайном, подчеркивающие вашу индивидуальность.
Классические шторы на заказ, по вашему проекту.
Создание штор для любого типа окна, по вашему стилю.
Премиальные ткани для штор на заказ, воплощая ваши идеи.
Доступные цены на шторы на заказ, по вашему желанию.
Элегантные шторы на заказ, от ведущих дизайнеров.
Премиум шторы на заказ, подчеркните стиль вашего помещения.
Шторы на заказ с доставкой и монтажом, по мере необходимости.
Высококачественные шторы на заказ, под любой стиль.
сшить шторы на заказ сшить шторы на заказ . Prokarniz
Мы предлагаем дипломы любых профессий по доступным ценам. Стараемся поддерживать для заказчиков адекватную политику цен. Для нас очень важно, чтобы документы были доступны для подавляющей массы граждан.
Приобретение документа, который подтверждает окончание института, – это грамотное решение. Приобрести диплом о высшем образовании: ry-diplom.com/diplom-kupit-provedennij/
купить диплом государственного образца купить диплом государственного образца .
Закажите уникальные шторы на заказ, отличное качество.
Качественные шторы на заказ, по выгодной цене.
Создание штор мечты, под ваш интерьер.
Шторы на заказ с доставкой, подчеркивающие ваш стиль.
Идеальные шторы на заказ для гостиной, с индивидуальным подходом.
Надежное изготовление штор на заказ, быстро и качественно.
Заказ штор по проекту клиента, с учетом особенностей помещения.
Эксклюзивные шторы на заказ, от профессионалов.
Минималистичные шторы на заказ, по вашему проекту.
Шторы на заказ с учетом ваших пожеланий, от ведущих мастеров.
Креативные шторы на заказ, с гарантией качества.
Пошив штор по индивидуальному проекту, с высоким качеством.
Стильные шторы по вашему проекту, от ведущих дизайнеров.
Индивидуальный пошив штор на заказ, подчеркните стиль вашего помещения.
Создание уникальных штор для любой комнаты, под ваш вкус.
Эксклюзивные ткани для пошива штор, по желанию клиента.
сшить шторы на заказ сшить шторы на заказ . прокарниз
Индивидуальный пошив штор
пошив штор на заказ пошив штор на заказ .
Это способствует более глубокому пониманию обсуждаемой темы и позволяет читателям самостоятельно сформировать свое мнение.
olympe casino avis: olympe casino – olympe
замена таймера оттайки холодильника aeg ремонт пылесосов aeg в москве
ремонт водонагревателей aeg москва https://aeg-servis-moskva.ru
Индивидуальный пошив штор
пошив штор на заказ пошив штор на заказ .
Сшить шторы на заказ по индивидуальному проекту, для вашего дома.
Премиальные шторы на заказ, по выгодной цене.
Изготовление штор на заказ, по вашим размерам.
Шторы на заказ с доставкой, подчеркивающие ваш стиль.
Пошив штор на заказ для кухни, с учетом модных трендов.
Профессиональный пошив штор по вашим размерам, по вашим желанием.
Пошив штор для нестандартных окон, используя современные технологии.
Модные шторы на заказ, от профессионалов.
Минималистичные шторы на заказ, под любой интерьер.
Шторы на заказ с учетом ваших пожеланий, с возможностью индивидуального дизайна.
Премиальные ткани для штор на заказ, с гарантией качества.
Изготовление штор на заказ быстро и недорого, по вашему желанию.
Элегантные шторы на заказ, от ведущих дизайнеров.
Премиум шторы на заказ, подчеркните стиль вашего помещения.
Шторы на заказ с доставкой и монтажом, по мере необходимости.
Высококачественные шторы на заказ, по желанию клиента.
сшить шторы на заказ сшить шторы на заказ . прокарниз
This post was exactly what I needed to read today Your words have provided me with much-needed clarity and reassurance
Your blog always puts a smile on my face and makes me feel better about the world Thank you for being a source of light and positivity
Your writing style is so engaging and makes even the most mundane topics interesting to read Keep up the fantastic work
Your writing is a breath of fresh air It’s clear that you put a lot of thought and effort into each and every post
I truly admire how you tackle difficult topics and address them in a respectful and thought-provoking manner
This blog is a great resource for anyone looking to live a more mindful and intentional life Thank you for providing valuable advice and tips
Сшить шторы на заказ по индивидуальному проекту, отличное качество.
Качественные шторы на заказ, быстро.
Пошив штор по индивидуальному дизайну, по вашим размерам.
Шторы на заказ с доставкой, высокое качество материалов.
Заказать шторы на заказ для спальни, с учетом модных трендов.
Профессиональный пошив штор по вашим размерам, под любой бюджет.
Заказ штор по проекту клиента, с учетом особенностей помещения.
Модные шторы на заказ, по вашему желанию.
Классические шторы на заказ, с учетом светотени.
Шторы на заказ с учетом ваших пожеланий, по вашему стилю.
Премиальные ткани для штор на заказ, воплощая ваши идеи.
Пошив штор по индивидуальному проекту, с высоким качеством.
Модные шторы на заказ для вашего дома, под ваш бюджет.
Премиум шторы на заказ, по вашему проекту.
Пошив штор по индивидуальному дизайну, по мере необходимости.
Высококачественные шторы на заказ, по желанию клиента.
сшить шторы на заказ сшить шторы на заказ . Prokarniz
ремонт холодильников аег в москве ремонт холодильников аег
мостбет вход http://mostbet7005.ru/ .
mostbet chrono mostbet chrono .
Экскурсия на Куршскую косу из Зеленоградска https://kurshskaya-kosa-ekskursii.ru/ с пешей прогулкой по променаду
Создайте уникальный стиль с римскими шторами на заказ
римские шторы на заказ римские шторы на заказ .
Элегантные шторы для загородного дома
шторы в загородном доме шторы в загородном доме .Ткацкий
сервис aeg ремонт стиральных машин аег
¡Hola fanáticos de las apuestas
AsГ puedes aprender sin poner en riesgo tu dinero.
ВїBuscas apuestas deportivas sin DNI? Algunos operadores internacionales permiten registrarse solo con un correo y contraseГ±a. ВЎSin enviar documentos!
Consulta el enlace para más información – http://casasdeapuestassinlicenciaespana.xyz/
¡Por muchos instantes divertidos!
Премиальные шторы на заказ для вашего интерьера, лучшие цены.
Идеальные шторы по вашим размерам, быстро.
Изготовление штор на заказ, под ваш интерьер.
Лучшие ткани для штор на заказ, подчеркивающие ваш стиль.
Идеальные шторы на заказ для гостиной, под ваш вкус.
Индивидуальный дизайн штор, по вашим желанием.
Заказ штор по проекту клиента, с учетом особенностей помещения.
Модные шторы на заказ, по вашему желанию.
Классические шторы на заказ, по вашему проекту.
Шторы на заказ с учетом ваших пожеланий, по вашему стилю.
Изготовление штор на заказ на любой вкус, с гарантией качества.
Доступные цены на шторы на заказ, по вашему желанию.
Элегантные шторы на заказ, под ваш бюджет.
Премиум шторы на заказ, с использованием лучших тканей.
Шторы на заказ с доставкой и монтажом, по мере необходимости.
Пошив штор на заказ с индивидуальным подходом, под любой стиль.
сшить шторы на заказ сшить шторы на заказ . Прокарниз
Современные римские шторы — идеально для интерьера
римские шторы на заказ римские шторы на заказ .
Гелиевые шары Липецк с бесплатной доставкой
It’s a pity you don’t have a donate button! I’d most certainly donate to this fantastic blog! I suppose for now i’ll settle for bookmarking and adding your RSS feed to my Google account. I look forward to new updates and will share this website with my Facebook group. Talk soon!
?Hola participantes de casino
Las internacionales, por el contrario, ofrecen una experiencia mГЎs flexible y personalizada.
Las casas de apuestas online en EspaГ±a sin licencia local ofrecen juegos innovadores y apuestas deportivas sin lГmite. Es una alternativa real para quienes buscan libertad total.
Casas de apuestas internacionales con acceso desde EspaГ±a – https://casasdeapuestassinlicenciaespana.xyz/#
?Que tengas excelentes ventajas!
Мы изготавливаем дипломы психологов, юристов, экономистов и прочих профессий по невысоким тарифам. Дипломы производят на фирменных бланках государственного образца Заказать диплом ВУЗа diplom-kaluga.ru
купить гифт гифт карта
скачать мостбет http://mostbet6013.ru .
?Hola participantes de casino
Algunas casas de apuestas casino ofrecen hasta 300 giros gratis en el primer depГіsito.
п»їUna casa de apuestas sin licencia puede ofrecer cuotas mГЎs competitivas, bonos mГЎs altos y menos verificaciones. Ideal si buscas apostar rГЎpido, sin complicaciones ni papeleo innecesario.
Casas de apuestas DGOJ: cГіmo verificar licencias – recomendamos que haga sus apuestas desde aquí.
?Que tengas excelentes partidas!
Качественный пошив штор на заказ
пошив штор на заказ пошив штор на заказ .
Практичные шторы для загородных интерьеров
шторы в загородном доме шторы в загородном доме .”Ткацкий”
mostbet.kg mostbet.kg .
auto transporters quotes auto transport quotes
Приобрести диплом о высшем образовании !
Приобретение диплома университета РФ у нас является надежным делом, так как документ будет заноситься в государственный реестр. Выгодно купить диплом университета diplomg-kurerom.ru/kupit-podlinnij-diplom-s-zaneseniem-v-reestr-bistro-4
Хорошо быть студентом, пока не придет пора писать диплом, что и произошло со мной, но не стоит отчаиваться, ведь есть хорошие компании что помогают с написанием и сдачей диплома на хорошие оценки!
Изначально искал информацию про купить диплом техника, купить диплом института, купить диплом готовый, купить готовый диплом, купить диплом нового образца, потом попал на proffdiplomik.com/kupit-diplom-trenera-po-fitnesu
Статья содержит четкие определения основных терминов, что помогает понять тему лучше.
Воздушные шарики на юбилей
купить подарочную карту онлайн подарочный сертификат карта
auto shipping companies auto transport near me
How can we ensure the security and privacy of data transmitted between web mashups and embedded devices in the emerging Web of Things ecosystem? Website my page
Гелиевые шарики Липецк на новый год
Scopri perche Betriot Casino e cosi popolare in Italia https://betriot-it.it per un’esperienza di gioco sicura e divertente.
Can I just say what a comfort to find someone that really knows what they are talking about on the internet. You actually understand how to bring an issue to light and make it important. More and more people must check this out and understand this side of the story. I was surprised that you are not more popular given that you most certainly possess the gift.
my website; https://U.to/Xa45Ig
How can we ensure the security and privacy of data transmitted between embedded devices in the Web of Things, especially considering the potential vulnerabilities of interconnected systems? Blog my page
Создайте уют с эксклюзивными шторами на заказ
шторы на заказ шторы на заказ . “Ткацкий”
olympe: olympe casino en ligne – olympe casino avis
spy comics HD comics reader free
anime dan dan dan manga online manga site best
How do privacy concerns and data security issues impact the development and adoption of the Web of Things technologies in embedded devices? Portfolio
Пошив штор на любой вкус, качественный пошив штор..
Пошив штор для вашего дома, по доступным ценам..
Пошив штор на заказ, по вашим размерам..
Пошив штор по вашему дизайну, обратитесь к нам..
Профессиональный пошив штор с монтажом, под ключ..
Лучшие ткани для пошива штор, по индивидуальному заказу..
Дизайнерские шторы на любой интерьер, Пускай ваш дом засияет..
Пошив штор на заказ, вам под силу..
Изысканный пошив штор, по индивидуальному проекту..
Пошив штор с индивидуальным подходом, оформляйте заказ онлайн..
Идеальные шторы для вашего пространства, по вашему дизайну..
Разнообразие тканей и стилей, по индивидуальному дизайну..
Элегантные шторы на заказ, от профессионалов..
Индивидуальный дизайн штор, от ведущих дизайнеров..
Эксклюзивный дизайн штор, с современными технологиями..
Высокое качество и стиль, с гарантией долговечности..
Индивидуальные шторы на заказ, по оптимальной цене..
пошив штор пошив штор . “Ткацкий”
Гелиевые шары фигуры
Лучшее, что видел в жанре — comatozze. Натуральность и харизма comatozze подкупает. Лучшая эротика на comatozze.com. Видео comatozze хочется пересматривать снова и снова. Присоединился к фанатам comatozze. Коматоцце — это не просто видео, это стиль. Лучше, чем платные платформы — comatozze. Оценил новую подборку — comatozze снова в деле. Настоящая работа над образом — comatozze смотреть comatozze.
Обзоры шторных решений для загородных домов, выберите стиль, подбираем шторы для загородного дома, теплота и уют, максимальная функциональность, современные материалы для штор, шторы для защиты от солнца, модные тренды в шторном дизайне, лучшие шторы для кухни в загородном доме, примеры оформления окон с шторами, шторы из натуральных тканей, автоматические шторы для загородного дома, стили штор для различных комнат, шторы как часть интерьера, сделайте выбор в пользу уютных штор, лучшие идеи для оформления окон, плюсы и минусы разных видов штор, используйте шторы для зонирования пространства, подбираем шторы под сезон
шторы в загородном доме шторы в загородном доме .
Автор предлагает читателю возможность самостоятельно сформировать мнение, представив различные аргументы.
Интересная статья, в которой представлены факты и анализ ситуации без явной предвзятости.
Thanks a lot for sharing this with all folks you actually realize what you are talking about! Bookmarked. Please additionally visit my site =). We will have a hyperlink trade agreement between us
Стильные шторы на заказ — дизайн по вашему желанию
шторы на заказ шторы на заказ . +7 (499) 460-69-87
дивитися кращі фільми 2025 нові фільми 2025 в Україні
How can we ensure the security and privacy of data transmitted and collected by embedded devices in the Web of Things, especially considering the potential for malicious actors to exploit vulnerabilities in these interconnected systems? My blog
Воздушные шары на 8 марта
Модные шторы на заказ для вашего дома
сшить шторы на заказ сшить шторы на заказ . +7 (499) 460-69-87
Стильные деревянные жалюзи с электроприводом
Деревянные горизонтальные жалюзи с электроприводом Деревянные горизонтальные жалюзи с электроприводом . Прокарниз
How can we ensure privacy and security in a world where embedded devices are interconnected through web mashups, creating a vast “Web of Things”? Portfolio
How can we ensure the security and privacy of data transmitted between embedded devices in the Web of Things, especially considering the potential vulnerabilities of web mashups and the increasing interconnectedness of devices in this ecosystem? https://www.muvizu.com/Profile/esimpp/Latest/
найкращі фільми 2025 дивитися онлайн нові фільми 2025 в Україні
нові фільми і серіали 2025 українські фільми онлайн HD
Индивидуальные шторы под ваши размеры
сшить шторы на заказ сшить шторы на заказ . Ткацкий
смотреть фильмы 2025 лучшие фильмы онлайн без смс
With the advancement of web mashups for embedded devices, how can we ensure that the Web of Things remains secure and protected from potential vulnerabilities and cyber attacks? My new blog
How can we ensure the security and privacy of data transmitted between embedded devices in the Web of Things, especially considering the potential vulnerabilities of interconnected systems? My new site
Индивидуальный пошив штор, эксклюзивный пошив штор..
Идеальные шторы на заказ, с гарантией качества..
Эксклюзивные решения в пошиве штор, по индивидуальному проекту..
Изготовление штор на заказ, звоните сейчас..
Пошив штор с доставкой, на любой вкус..
Пошив штор премиум-класса, гарантия качества..
Дизайнерские шторы на любой интерьер, Обратитесь сегодня..
Шторы на любой вкус и цвет, по вашему стилю..
Пошив штор из эксклюзивных тканей, для элитных интерьеров..
Выберите качественный пошив штор, получите консультацию..
Идеальные шторы для вашего пространства, гарантия соответствия..
Пошив штор на заказ по вашим размерам, подходящий ваш стиль..
Пошив штор с профессиональным монтажом, по разумной цене..
Индивидуальный дизайн штор, от ведущих дизайнеров..
Пошив штор для любого помещения, по вашим размерам..
Лучшие ткани для пошива штор, с гарантией долговечности..
Индивидуальные шторы на заказ, с бесплатной консультацией..
пошив штор пошив штор . Ткацкий
How can we ensure the security and privacy of data transmitted and stored within the Web of Things ecosystem, especially with the increasing integration of embedded devices and web mashups? My new blog
Шторы для коттеджа: материалы и стили
шторы для коттеджа шторы для коттеджа .
Гелиевые шары Липецк на свадьбу
Где покупать технику? лучшие магазины россии рейтинг: проверенные продавцы, акции, удобная доставка и реальный опыт покупателей. Обновляем регулярно.
Лучшие шторы для коттеджа
шторы для коттеджа шторы для коттеджа .
Гелиевые шарики в Липецке на день рожденье
Acheter Cialis: Cialis sans ordonnance pas cher – Cialis sans ordonnance 24h tadalmed.shop
Инновации в автоматике от Somfy для вашего удобства
Автоматика Somfy Автоматика Somfy . Prokarniz
Хотите запустить Castle Clash на Windows? Оцените улучшенной графики и управления мышью. Сражайтесь с игроками со всего мира в масштабных войнах, используя известные эмуляторы, вроде LDPlayer. Кликните по ссылке castle-clash-skachat-na-pk.ru, чтобы скачать игру и присоединяйтесь к армии фанатов со всех уголков планеты!
castle clash скачать на компьютер
castle clash на пк скачать
castle clash скачать взлом
¡Hola aventureros del juego
usando solo un correo electrГіnico y una contraseГ±a segura.
Los jugadores VIP suelen preferir plataformas sin licencia por sus condiciones personalizadas y recompensas exclusivas.
Apuestas sin licencia en EspaГ±a: alternativas – apuestas sin licencia española
¡Por muchos instantes divertidos!
Cialis en ligne: Cialis sans ordonnance 24h – Tadalafil 20 mg prix en pharmacie tadalmed.shop
Лучшие шторы для спокойствия и уюта, создайте уют, подбираем шторы для загородного дома, эстетика и комфорт, продуманный дизайн, натуральные ткани для штор, шторы для приватности, стильные решения для штор, выбираем шторы для загородной гостиной, уникальные идеи штор для загородных фасадов, стильные шторы из льна и холста, современные механизмы для штор, гармония штор и мебели, декор и оформление окон в загородном доме, обеспечьте комфорт с нашими шторами, тренды в шторном дизайне 2025, плюсы и минусы разных видов штор, подчеркните архитектуру дома с помощью штор, шторы для зимнего уюта в загородном доме
шторы в загородном доме шторы в загородном доме .
kamagra en ligne: kamagra en ligne – achat kamagra
My new online site
Автоматика Somfy — комфорт и безопасность
Автоматика Somfy Автоматика Somfy . Прокарниз
Pharmacie en ligne livraison Europe: Medicaments en ligne livres en 24h – pharmacie en ligne france livraison belgique pharmafst.com
?Hola jugadores
En casasapuestassindni.xyz puedes ver cuГЎles son las mejores casas de apuestas sin dni disponibles este mes. Todas ofrecen juegos variados, soporte en espaГ±ol y mГ©todos de pago alternativos.
apuestas deportivas sin dni actuales – casasapuestassindni.xyz
?Que tengas excelentes premios!
Pharmacie Internationale en ligne: Meilleure pharmacie en ligne – п»їpharmacie en ligne france pharmafst.com
Гелиевые шары в Липецке с круглосуточной доставкой
Cialis generique prix: Pharmacie en ligne Cialis sans ordonnance – cialis generique tadalmed.shop
Электрические жалюзи с пультом — комфорт в каждом доме
жалюзи с пультом жалюзи с пультом . прокарниз
смотреть хороший русский фильм лучшие фильмы онлайн без смс
фильмы 2025 уже вышедшие лучшие фильмы онлайн без смс
лучшие серии фильмов фильмы 2025 без регистрации и рекламы
покупка аккаунтов magazin-akkauntov-online.ru
Acheter Viagra Cialis sans ordonnance: Pharmacie en ligne Cialis sans ordonnance – Achat Cialis en ligne fiable tadalmed.shop
Деревянные жалюзи с электроприводом: современные технологии
Деревянные горизонтальные жалюзи с электроприводом Деревянные горизонтальные жалюзи с электроприводом . Прокарниз
лучшие фильмы онлайн ужасы 2025 смотреть онлайн HD
фильмы онлайн бесплатно сериалы 2025 онлайн бесплатно HD
смотреть фильмы фантастика 2025 смотреть бесплатно
Гелиевые шары в Липецке на ДР
Облегчите жизнь с жалюзи с пультом — современно и удобно
жалюзи с пультом жалюзи с пультом . +7 (499) 638-25-37
Kamagra pharmacie en ligne: Kamagra Oral Jelly pas cher – Kamagra Commander maintenant
смотреть фильмы онлайн драма фильмы онлайн 2025 без подписки
фильмы драма комедия смотреть фильмы онлайн бесплатно 2025
фильмы фантастика 2025 фильмы в 4К бесплатно онлайн
google porn visit.
pharmacie en ligne pas cher: Meilleure pharmacie en ligne – trouver un mГ©dicament en pharmacie pharmafst.com
Пошив штор на любой вкус, обратитесь..
Создайте уникальный интерьер с пошивом штор, с гарантией качества..
Пошив штор на заказ, с использованием лучших тканей..
Дизайнерские шторы на заказ, обратитесь к нам..
Быстрый пошив штор, на любой вкус..
Мастерская по пошиву штор, гарантия качества..
Дизайнерские шторы на любой интерьер, Пускай ваш дом засияет..
Шторы на любой вкус и цвет, по вашему стилю..
Изысканный пошив штор, для элитных интерьеров..
Экспертный пошив штор в кратчайшие сроки, звоните прямо сейчас..
Идеальные шторы для вашего пространства, гарантия соответствия..
Пошив штор на заказ по вашим размерам, подходящий ваш стиль..
Элегантные шторы на заказ, от профессионалов..
Уникальные шторы с пошивом на заказ, с индивидуальным подходом..
Пошив штор для любого помещения, по вашим размерам..
Лучшие ткани для пошива штор, от лучших мастеров..
Создаем шторы, которые преобразят ваш интерьер, с бесплатной консультацией..
пошив штор пошив штор . +7 (499) 460-69-87
acheter kamagra site fiable: kamagra 100mg prix – kamagra oral jelly
смотреть бесплатно фильмы 2025 лучшие фильмы онлайн без смс
I appreciate how this blog promotes self-growth and personal development It’s important to continuously strive to become the best version of ourselves
Воздушные шарики на юбилей
Cialis sans ordonnance 24h: Acheter Cialis – Pharmacie en ligne Cialis sans ordonnance tadalmed.shop
площадка для продажи аккаунтов аккаунты с балансом
металлические значки на магните значки из металла на заказ
перепродажа аккаунтов маркетплейс аккаунтов
Kamagra Commander maintenant: Kamagra pharmacie en ligne – Kamagra pharmacie en ligne
Автоматические электроприводы для горизонтальных жалюзи
электропривод для горизонтальных жалюзи электропривод для горизонтальных жалюзи .
Гелиевые шары на выпускной
продать аккаунт заработок на аккаунтах
Acheter Viagra Cialis sans ordonnance: Cialis sans ordonnance 24h – Acheter Viagra Cialis sans ordonnance tadalmed.shop
Умные моторизированные жалюзи — инновационный дизайн
моторизированные жалюзи моторизированные жалюзи . прокарниз
pharmacie en ligne livraison europe: Medicaments en ligne livres en 24h – pharmacie en ligne livraison europe pharmafst.com
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:ремонт крупногабаритной техники в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
п»їpharmacie en ligne france: pharmacie en ligne fiable – pharmacie en ligne france livraison belgique pharmafst.com
?Hola participantes de casino
Casino 20 euros gratis sin depГіsito EspaГ±a es la mejor manera de empezar a ganar en grande sin invertir.
Recibe 20 euros gratis en casinos confiables de EspaГ±a y juega sin compromiso. – casino20eurosgratissindeposito.guru
?Que tengas excelentes botes acumulados!
Инновационные моторизированные жалюзи для вашей жизни
моторизированные жалюзи моторизированные жалюзи . Prokarniz
услуги по продаже аккаунтов покупка аккаунтов
сколько стоит металлический значок https://izgotovlenie-znachkov-moskva.ru/
kamagra pas cher: Achetez vos kamagra medicaments – acheter kamagra site fiable
маркетплейс аккаунтов соцсетей маркетплейс аккаунтов соцсетей
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:сервис центры бытовой техники москва
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
pharmacies en ligne certifiГ©es: Medicaments en ligne livres en 24h – trouver un mГ©dicament en pharmacie pharmafst.com
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:ремонт крупногабаритной техники в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Деревянные горизонтальные жалюзи с электроприводом: функциональность и дизайн
Деревянные горизонтальные жалюзи с электроприводом Деревянные горизонтальные жалюзи с электроприводом . Prokarniz
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:ремонт бытовой техники в мск
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Cialis sans ordonnance 24h: Tadalafil 20 mg prix sans ordonnance – Pharmacie en ligne Cialis sans ordonnance tadalmed.shop
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:ремонт бытовой техники в мск
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
маркетплейс аккаунтов соцсетей услуги по продаже аккаунтов
продажа аккаунтов купить аккаунт
металлические значки на заказ metallicheskie-znachki-zakaz.ru
платформа для покупки аккаунтов безопасная сделка аккаунтов
pharmacie en ligne france livraison belgique: Pharmacie en ligne France – п»їpharmacie en ligne france pharmafst.com
Электроуправляемые деревянные горизонтальные жалюзи
Деревянные горизонтальные жалюзи с электроприводом Деревянные горизонтальные жалюзи с электроприводом . +7 (499) 638-25-37
купить аккаунт с прокачкой купить аккаунт
перепродажа аккаунтов аккаунты с балансом
acheter kamagra site fiable: kamagra oral jelly – Kamagra Commander maintenant
Лучшие шторы для спокойствия и уюта, с помощью штор, подбираем шторы для загородного дома, теплота и уют, максимальная функциональность, экологичные шторы для дома, эффективные шторы для загородного дома, стильные решения для штор, как подобрать шторы для спальни в доме за городом, уникальные идеи штор для загородных фасадов, шторы из натуральных тканей, удобные системы управления шторами, гармония штор и мебели, декор и оформление окон в загородном доме, создайте атмосферу с подходящими шторами, тренды в шторном дизайне 2025, сравнение видов штор для дачи, используйте шторы для зонирования пространства, подбираем шторы под сезон
шторы в загородном доме шторы в загородном доме .
п»їpharmacie en ligne france: Pharmacie en ligne France – pharmacie en ligne france livraison belgique pharmafst.com
?Hola entusiastas de las apuestas
Apostar sin registrarse es una de las formas mГЎs rГЎpidas de disfrutar del juego online. Ideal para quienes solo quieren pasar un rato sin comprometer su privacidad o sus datos.
apuestas deportivas sin dni actuales – casas de apuestas sin verificacion
?Que tengas excelentes tiradas !
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:ремонт бытовой техники в мск
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
маркетплейс для реселлеров заработок на аккаунтах
платформа для покупки аккаунтов безопасная сделка аккаунтов
значок металлический круглый железные значки на заказ
Идеи для штор в загородном доме, создайте уют, лучшие материалы для штор в загородных домах, стильный дизайн штор, максимальная функциональность, натуральные ткани для штор, шторы для приватности, стильные решения для штор, лучшие шторы для кухни в загородном доме, примеры оформления окон с шторами, шторы из натуральных материалов для уюта, современные механизмы для штор, гармония штор и мебели, декор и оформление окон в загородном доме, обеспечьте комфорт с нашими шторами, лучшие идеи для оформления окон, что выбрать для загородного дома, создайте уют с помощью уникальных штор, идеи сезонного оформления окон
шторы в загородном доме шторы в загородном доме .
canadian pharmacy store: Express Rx Canada – canadian pharmacy near me
маркетплейс аккаунтов платформа для покупки аккаунтов
профиль с подписчиками купить аккаунт
купить аккаунт услуги по продаже аккаунтов
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем:сервис центры бытовой техники москва
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
RxExpressMexico: RxExpressMexico – mexico pharmacy order online
Пошив штор на любой вкус, выберите..
Идеальные шторы на заказ, с гарантией качества..
Индивидуальный пошив штор под любую комнату, с использованием лучших тканей..
Дизайнерские шторы на заказ, обратитесь к нам..
Пошив штор с доставкой, под ключ..
Мастерская по пошиву штор, гарантия качества..
Дизайнерские шторы на любой интерьер, Пускай ваш дом засияет..
Шторы на любой вкус и цвет, вам под силу..
Изысканный пошив штор, для элитных интерьеров..
Экспертный пошив штор в кратчайшие сроки, получите консультацию..
Идеальные шторы для вашего пространства, гарантия соответствия..
Пошив штор на заказ по вашим размерам, по индивидуальному дизайну..
Элегантные шторы на заказ, по разумной цене..
Уникальные шторы с пошивом на заказ, от ведущих дизайнеров..
Пошив штор для любого помещения, подчеркивающих ваш стиль..
Высокое качество и стиль, по вашему стилю..
Создаем шторы, которые преобразят ваш интерьер, с бесплатной консультацией..
пошив штор пошив штор . “Ткацкий”
металлические значки на заказ значки из металла на заказ
площадка для продажи аккаунтов маркетплейс аккаунтов соцсетей
маркетплейс аккаунтов соцсетей купить аккаунт с прокачкой
Где купить диплом специалиста?
Получаемый диплом с необходимыми печатями и подписями отвечает требованиям и стандартам, неотличим от оригинала. Не откладывайте свои мечты и цели на долгие годы, реализуйте их с нами – отправляйте заявку на диплом сегодня! Диплом о среднем образовании – не проблема! testforum.1stbb.ru/viewtopic.phpf=3&t=1543
legal canadian pharmacy online: Buy medicine from Canada – canadian online drugs
[url=https://telegra.ph/Windows-10-Windows-11-activation-is-forever-free-04-04]Windows 10 Permanent Activation Cmd[/url]
[url=https://x.com/RauheShemi20597/status/1908418523719696728]Windows Communication Foundation Http Activation Download[/url]
[url=https://x.com/RauheShemi20597/status/1908418523719696728]Regedit Activate Windows[/url]
[url=https://x.com/RauheShemi20597/status/1908418523719696728]Activar Windows 10 Cmd 2022[/url]
[url=https://x.com/RauheShemi20597/status/1908418523719696728]Windows Activation Technologies Service[/url]
Windows Activation
Индивидуальный пошив штор, эксклюзивный пошив штор..
Идеальные шторы на заказ, с гарантией качества..
Пошив штор на заказ, по вашим размерам..
Пошив штор по вашему дизайну, звоните сейчас..
Быстрый пошив штор, по вашим требованиям..
Пошив штор премиум-класса, по индивидуальному заказу..
Дизайнерские шторы на любой интерьер, Позвольте нам помочь..
Шторы на любой вкус и цвет, по вашему стилю..
Изысканный пошив штор, для элитных интерьеров..
Выберите качественный пошив штор, получите консультацию..
Идеальные шторы для вашего пространства, по вашему дизайну..
Премиум пошив штор для интерьера, по индивидуальному дизайну..
Индивидуальный стиль ваших окон, под ключ..
Создаем шторы по вашим мечтам, от ведущих дизайнеров..
Пошив штор для любого помещения, подчеркивающих ваш стиль..
Профессиональный пошив штор, от лучших мастеров..
Индивидуальные шторы на заказ, с бесплатной консультацией..
пошив штор пошив штор . Ткацкий
продать аккаунт магазин аккаунтов
купить аккаунт с прокачкой перепродажа аккаунтов
canadian pharmacy ed medications: is canadian pharmacy legit – canadian pharmacy victoza
биржа аккаунтов маркетплейс аккаунтов
Medicine From India: MedicineFromIndia – medicine courier from India to USA
Шторы на лесных участках: особенности выбора
шторы в загородном доме шторы в загородном доме .+7 (499) 460-69-87
mexico pharmacy order online: Rx Express Mexico – mexican online pharmacy
indian pharmacy online shopping indian pharmacy MedicineFromIndia
mexico pharmacies prescription drugs: mexico pharmacy order online – mexico drug stores pharmacies
магазин аккаунтов продажа аккаунтов
маркетплейс аккаунтов маркетплейс аккаунтов
Your writing is so eloquent and persuasive You have a talent for getting your message across and inspiring meaningful change
Где купить качественные шторы для загородного дома
шторы в загородном доме шторы в загородном доме .Ткацкий
indian pharmacy online: MedicineFromIndia – indian pharmacy online
Лучшие условия на VavadaUkraine.neocities.org
ігри казино https://vavadaukraine.neocities.org/ .
canadian pharmacy reviews: Generic drugs from Canada – reddit canadian pharmacy
профиль с подписчиками магазин аккаунтов социальных сетей
продажа аккаунтов соцсетей аккаунт для рекламы
Премиальные шторы на заказ для вашего интерьера, для офиса.
Премиальные шторы на заказ, с гарантией качества.
Пошив штор по индивидуальному дизайну, под ваш интерьер.
Эксклюзивные шторы на заказ, по индивидуальному дизайну.
Идеальные шторы на заказ для гостиной, с учетом модных трендов.
Профессиональный пошив штор по вашим размерам, быстро и качественно.
Пошив штор для нестандартных окон, используя современные технологии.
Модные шторы на заказ, подчеркивающие вашу индивидуальность.
Классические шторы на заказ, под любой интерьер.
Шторы на заказ с учетом ваших пожеланий, по вашему стилю.
Премиальные ткани для штор на заказ, под любой интерьер.
Пошив штор по индивидуальному проекту, с высоким качеством.
Модные шторы на заказ для вашего дома, под любой стиль интерьера.
Дизайнерские шторы на заказ, с использованием лучших тканей.
Шторы на заказ с доставкой и монтажом, от профессиональных мастеров.
Высококачественные шторы на заказ, под любой стиль.
сшить шторы на заказ сшить шторы на заказ . Прокарниз
indian pharmacy: indian pharmacy online – indian pharmacy online
маркетплейс для реселлеров купить аккаунт с прокачкой
магазин аккаунтов маркетплейс аккаунтов
indian pharmacy: medicine courier from India to USA – indian pharmacy online shopping
MedicineFromIndia Medicine From India Medicine From India
перепродажа аккаунтов купить аккаунт с прокачкой
маркетплейс аккаунтов заработок на аккаунтах
Закажите уникальные шторы на заказ, для офиса.
Идеальные шторы по вашим размерам, быстро.
Изготовление штор на заказ, под ваш интерьер.
Лучшие ткани для штор на заказ, по индивидуальному дизайну.
Заказать шторы на заказ для спальни, с учетом модных трендов.
Индивидуальный дизайн штор, под любой бюджет.
Создание штор на заказ из натуральных тканей, с учетом особенностей помещения.
Эксклюзивные шторы на заказ, подчеркивающие вашу индивидуальность.
Современные шторы на заказ, под любой интерьер.
Пошив штор на заказ по индивидуальным меркам, по вашему стилю.
Изготовление штор на заказ на любой вкус, с гарантией качества.
Изготовление штор на заказ быстро и недорого, с доставкой по Москве и регионам.
Элегантные шторы на заказ, под любой стиль интерьера.
Индивидуальный пошив штор на заказ, с использованием лучших тканей.
Пошив штор по индивидуальному дизайну, по мере необходимости.
Эксклюзивные ткани для пошива штор, по желанию клиента.
сшить шторы на заказ сшить шторы на заказ . Prokarniz
mexican rx online: RxExpressMexico – Rx Express Mexico
?Hola aficionados al casino
Casino 20 euros gratis te permite empezar tu aventura de apuestas con el pie derecho.
Bonos sin depГіsito en EspaГ±a: GuГa actualizada 2025 – casino20eurosgratissindeposito
?Que tengas excelentes beneficios !
медицинский центр абакан телефон медицинский центр официальный
варикоз конечностей лечение клиника лечения варикоза
поликлиника гинеколог гинеколог абакан отзывы
купить аккаунт с прокачкой маркетплейс аккаунтов
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: сервисный центр iphone в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
покупка аккаунтов покупка аккаунтов
платформа для покупки аккаунтов гарантия при продаже аккаунтов
косметолог медицинский косметолог
услуги лора хороший лор
услуги лазерной эпиляции виды лазерной эпиляции
Качественное торговое оборудование на Torgove-obladnannya.biz.ua
торгові стелажі вітрини прилавки торгові стелажі вітрини прилавки .
nba直播線上看
隨著2024-25賽季NBA附加賽的火熱進行,球迷們的熱情也隨之高漲。每一場比賽都關乎球隊命運,而季後賽的激烈對決更是指日可待。對於忠實球迷來說,能夠即時觀看這些精彩賽事至關重要。NBA直播線上看服務應運而生,為球迷提供了便捷的觀賽體驗。無論是上班族抽空追賽,還是學生族群熬夜支持,都能通過手機、平板或電腦隨時隨地觀看比賽。高清畫質、專業解說和多角度回放,讓您仿佛置身現場,感受每一次扣籃和三分球帶來的震撼。除了賽事直播,許多平台還提供賽程表、球員數據和賽後分析等豐富內容。您可以輕鬆掌握各隊積分排名、明星球員表現,甚至深入了解戰術分析。對於喜愛運彩投注的朋友,即時的數據分析和專家預測也能成為您決策的重要參考。選擇可靠的NBA直播平台尤為重要。穩定的播放品質、低延遲的直播信號和完整的賽事覆蓋,都是評判標準。部分平台還提供會員專屬服務,如廣告免除、賽事回放和獨家內容等特權。隨著科技發展,NBA直播線上看服務不斷創新,為球迷帶來更加便捷、沉浸的觀賽體驗。不再受限於電視轉播,每一位球迷都能隨心所欲地追逐熱愛的籃球賽事,見證精彩時刻。
продать аккаунт перепродажа аккаунтов
маркетплейс аккаунтов соцсетей заработок на аккаунтах
insufend is a cutting-edge herbal formula specifically designed to help regulate blood sugar levels and promote a healthier metabolism.
Обзор лучших моделей жалюзи с пультом 2025
жалюзи с пультом жалюзи с пультом . прокарниз
купить аккаунт продажа аккаунтов соцсетей
безопасная сделка аккаунтов услуги по продаже аккаунтов
Качественные жалюзи с пультом по выгодной цене
жалюзи с пультом жалюзи с пультом . прокарниз
лазерная эпиляция зоны бикини виды лазерной эпиляции
специалист лазерной эпиляции лазерная эпиляция бикини
лазерная эпиляция всего тела lazernaya-epilyaciya1.ru
пин ап казино: pin up вход – пин ап казино
Энергосбережение и удобство с Somfy
Автоматика Somfy Автоматика Somfy . прокарниз
URL942762
¡Hola apasionados del juego !
ObtГ©n 100 giros gratis y entra a torneos especiales solo para nuevos jugadores. Algunas promociones son por tiempo limitado. ВЎActГєa rГЎpido!
Encuentra giros gratis EspaГ±a sin depГіsitos ocultos – 100 euros gratis sin deposito.
¡Que tengas magníficas recompensas fantásticas !
стоимость хранения вещей стоимость хранения вещей .
vavada: vavada вход – vavada casino
insufend is a cutting-edge herbal formula specifically designed to help regulate blood sugar levels and promote a healthier metabolism.
Создайте уют с автоматикой Somfy
Автоматика Somfy Автоматика Somfy . Prokarniz
эпиляция классическое бикини лазерная эпиляция бикини спб
печать на пакетах спб печать на zip пакетах
пин ап казино официальный сайт: пин ап вход – пинап казино
usman season 5 ep 152
nba轉播
隨著2024-25賽季NBA附加賽的火熱進行,球迷們的熱情也隨之高漲。每一場比賽都關乎球隊命運,而季後賽的激烈對決更是指日可待。對於忠實球迷來說,能夠即時觀看這些精彩賽事至關重要。NBA直播線上看服務應運而生,為球迷提供了便捷的觀賽體驗。無論是上班族抽空追賽,還是學生族群熬夜支持,都能通過手機、平板或電腦隨時隨地觀看比賽。高清畫質、專業解說和多角度回放,讓您仿佛置身現場,感受每一次扣籃和三分球帶來的震撼。除了賽事直播,許多平台還提供賽程表、球員數據和賽後分析等豐富內容。您可以輕鬆掌握各隊積分排名、明星球員表現,甚至深入了解戰術分析。對於喜愛運彩投注的朋友,即時的數據分析和專家預測也能成為您決策的重要參考。選擇可靠的NBA直播平台尤為重要。穩定的播放品質、低延遲的直播信號和完整的賽事覆蓋,都是評判標準。部分平台還提供會員專屬服務,如廣告免除、賽事回放和獨家內容等特權。隨著科技發展,NBA直播線上看服務不斷創新,為球迷帶來更加便捷、沉浸的觀賽體驗。不再受限於電視轉播,每一位球迷都能隨心所欲地追逐熱愛的籃球賽事,見證精彩時刻。
This is such an important and often overlooked topic Thank you for bringing attention to it and offering valuable advice
Your blog has helped me through some tough times and I am forever grateful for your positive and uplifting content
лазерная эпиляция лица для мужчин лазерная эпиляция бикини для мужчин
печать бейджей стоимость бейджи заказ печать
платформа для покупки аккаунтов https://birzha-akkauntov-online.ru/
Топ тенденций в шторах для коттеджа
шторы для коттеджа шторы для коттеджа .
пинап казино: пин ап казино официальный сайт – пин ап казино
услуги по хранению вещей москва услуги по хранению вещей москва .
перепродажа аккаунтов маркетплейс аккаунтов соцсетей
аккаунты с балансом покупка аккаунтов
пин ап казино: пин ап зеркало – пин ап вход
маркетплейс аккаунтов соцсетей профиль с подписчиками
Шторы для коттеджа: советы дизайнеров
шторы для коттеджа шторы для коттеджа .
usman khan shinwari
заказать печать конвертов https://pechat-konvertov-spb.ru/
печать рекламных буклетов заказать печать буклетов
pin up azerbaycan: pin-up casino giris – pin-up
маркетплейс аккаунтов продать аккаунт
Сшить шторы на заказ легко и быстро
сшить шторы на заказ сшить шторы на заказ . “Ткацкий”
перепродажа аккаунтов маркетплейс аккаунтов
платформа для покупки аккаунтов услуги по продаже аккаунтов
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем: сервисные центры в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
вавада официальный сайт: вавада зеркало – вавада зеркало
печать наклеек на футболки печать наклеек на самоклеющейся
изготовить табличку из пластика https://tablichki-pvh.ru/
печать рекламного плаката pechat-plakatov-spb.ru/
usman garuba stats g league
insufend is a cutting-edge herbal formula specifically designed to help regulate blood sugar levels and promote a healthier metabolism.
Профессиональное изготовление штор под заказ
сшить шторы на заказ сшить шторы на заказ . +7 (499) 460-69-87
пин ап вход: пин ап казино – пин ап зеркало
Usman Yusupov
Создайте уют с эксклюзивными шторами на заказ
шторы на заказ шторы на заказ . Ткацкий
vavada: vavada – vavada casino
изготовление стенда цена изготовление выставочных стендов
https://www.adobe.com/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом.
Мы предлагаем: сервисные центры в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Discover the best of Diana Rider’s videos here. | All about Diana Rider in one place | Enjoy premium access to Diana Rider’s hottest content. | Find all Diana Rider porn videos here. | Her charisma is unmatched – Diana Rider. | Explore Diana Rider’s hidden gems. | Adult fans agree: Diana Rider is a legend. | Dive into Diana Rider’s hottest moments. | The best adult performances come from Diana Rider. biography of diana rider.
pin up az: pin up – pin up azerbaycan
Шторы на заказ — индивидуальный подход к вашему интерьеру
шторы на заказ шторы на заказ . “Ткацкий”
Website for Buying Accounts Secure Account Purchasing Platform
Account Exchange Service Account Exchange Service
Find Accounts for Sale https://socialaccountsmarket2025.com
Account Catalog buyaccountsmarketplace.com
Идеальные римские шторы для дизайнерских интерьеров
римские шторы на заказ римские шторы на заказ .
vavada: вавада казино – vavada
Дизайнерские римские шторы на заказ
римские шторы на заказ римские шторы на заказ .
pin-up casino giris: pin up az – pinup az
Премиум услуги по пошиву штор
пошив штор на заказ пошив штор на заказ .
vavada casino: vavada casino – vavada вход
Buy Pre-made Account Buy and Sell Accounts
Account Buying Platform Account Catalog
https://www.adobe.com/
Account Trading Platform Purchase Ready-Made Accounts
# Harvard University: A Legacy of Excellence and Innovation
## A Brief History of Harvard University
Founded in 1636, **Harvard University** is the oldest and one of the most prestigious higher education institutions in the United States. Located in Cambridge, Massachusetts, Harvard has built a global reputation for academic excellence, groundbreaking research, and influential alumni. From its humble beginnings as a small college established to educate clergy, it has evolved into a world-leading university that shapes the future across various disciplines.
## Harvard’s Impact on Education and Research
Harvard is synonymous with **innovation and intellectual leadership**. The university boasts:
– **12 degree-granting schools**, including the renowned **Harvard Business School**, **Harvard Law School**, and **Harvard Medical School**.
– **A faculty of world-class scholars**, many of whom are Nobel laureates, Pulitzer Prize winners, and pioneers in their fields.
– **Cutting-edge research**, with Harvard leading initiatives in artificial intelligence, public health, climate change, and more.
Harvard’s contribution to research is immense, with billions of dollars allocated to scientific discoveries and technological advancements each year.
## Notable Alumni: The Leaders of Today and Tomorrow
Harvard has produced some of the **most influential figures** in history, spanning politics, business, entertainment, and science. Among them are:
– **Barack Obama & John F. Kennedy** – Former U.S. Presidents
– **Mark Zuckerberg & Bill Gates** – Tech visionaries (though Gates did not graduate)
– **Natalie Portman & Matt Damon** – Hollywood icons
– **Malala Yousafzai** – Nobel Prize-winning activist
The university continues to cultivate future leaders who shape industries and drive global progress.
## Harvard’s Stunning Campus and Iconic Library
Harvard’s campus is a blend of **historical charm and modern innovation**. With over **200 buildings**, it features:
– The **Harvard Yard**, home to the iconic **John Harvard Statue** (and the famous “three lies” legend).
– The **Widener Library**, one of the largest university libraries in the world, housing **over 20 million volumes**.
– State-of-the-art research centers, museums, and performing arts venues.
## Harvard Traditions and Student Life
Harvard offers a **rich student experience**, blending academics with vibrant traditions, including:
– **Housing system:** Students live in one of 12 residential houses, fostering a strong sense of community.
– **Annual Primal Scream:** A unique tradition where students de-stress by running through Harvard Yard before finals!
– **The Harvard-Yale Game:** A historic football rivalry that unites alumni and students.
With over **450 student organizations**, Harvard students engage in a diverse range of extracurricular activities, from entrepreneurship to performing arts.
## Harvard’s Global Influence
Beyond academics, Harvard drives change in **global policy, economics, and technology**. The university’s research impacts healthcare, sustainability, and artificial intelligence, with partnerships across industries worldwide. **Harvard’s endowment**, the largest of any university, allows it to fund scholarships, research, and public initiatives, ensuring a legacy of impact for generations.
## Conclusion
Harvard University is more than just a school—it’s a **symbol of excellence, innovation, and leadership**. Its **centuries-old traditions, groundbreaking discoveries, and transformative education** make it one of the most influential institutions in the world. Whether through its distinguished alumni, pioneering research, or vibrant student life, Harvard continues to shape the future in profound ways.
Would you like to join the ranks of Harvard’s legendary scholars? The journey starts with a dream—and an application!
https://www.harvard.edu/
пин ап казино: пинап казино – пин ап казино
Заказ штор по индивидуальным меркам
пошив штор на заказ пошив штор на заказ .
вавада: вавада казино – vavada
Secure Account Sales Gaming account marketplace
Find Accounts for Sale Account Store
промокод продамус промокод продамус .
Find Accounts for Sale Account marketplace
вавада казино: вавада официальный сайт – vavada вход
pin-up: pin up az – pin-up casino giris
вавада: вавада зеркало – vavada
find accounts for sale buy accounts
account trading service gaming account marketplace
buy account find accounts for sale
промокод на продамус промокод на продамус .
пин ап зеркало: пин ап казино официальный сайт – пин ап казино
accounts for sale sell pre-made account
Оборудование для очистки зерна высокого качества — mashiny-dlya-ochistki-zerna.biz.ua
зерноочисні машини купити зерноочисні машини купити .
pin up вход: пин ап вход – пин ап казино официальный сайт
пин ап зеркало: пин ап казино – пин ап казино
вавада: vavada casino – вавада официальный сайт
Simply wish to say your article is as amazing. The clarity for your submit is simply cool and that i could think you’re a professional on this subject. Well together with your permission let me to seize your feed to stay up to date with impending post. Thanks 1,000,000 and please keep up the gratifying work.
https://kamen.dp.ua/yak-korpusy-fary-mozhut-zekonomyty-vam-hroshi-na-r.html
profitable account sales marketplace for ready-made accounts
account trading platform account trading platform
открытие компании в англии https://zaregistrirovat-kompaniyu-england.com/
profitable account sales profitable account sales
pin-up casino giris: pin up az – pin up
buy and sell accounts sell account
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: ремонт айфонов в москве недорого
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
vavada: вавада официальный сайт – vavada casino
Мы предлагаем дипломы любых профессий по доступным ценам.– russiancg4you.copiny.com/question/details/id/1093743
account buying service account trading platform
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: срочный ремонт iphone в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Надеюсь, что эти комментарии добавят ещё больше положительных настроений к информационной статье!
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: ремонт iphone в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
открыть бизнес в англии открыть бизнес в великобритании
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: вызвать мастера по ремонту iphone
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
social media account marketplace account trading platform
account buying service account marketplace
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: сервисный центр iphone в москве адреса
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
cloud server for rent us cloud server
открытие компании в великобритании открыть фирму в великобритании
Permanent makeup eyebrows Austin TX
Spintax Version of the Text:
Uncover the Best Cosmetic Clinic in TX, USA: Iconic Beauty Center.
Nestled in the vibrant heart of Austin, Texas, Icon Beauty Clinic has established itself as a go-to spot for those aiming to elevate their natural beauty. With a team of highly skilled professionals committed to excellence, this clinic delivers a personalized experience that ensures every client feels valued, self-assured, and beautiful. If you want to rejuvenate your look or choose timeless treatments, Icon Beauty Clinic is the ideal option for achieving classic allure.
—
Customized Care for Every Client
As soon as you enter your chosen beauty destination, you’ll appreciate the emphasis on individualized care. Every treatment is designed to meet your personal preferences, using only premium products and advanced technologies. The skilled professionals takes the time to learn about your aspirations, ensuring that each procedure not only brings out your best traits but also matches your daily habits.
—
Take a Look at Some of the Standout Services That Make This Clinic a Innovator in the Beauty Industry.
Eyelash Lift and Tint
Elevate the natural beauty of your eyes with an eyelash lift and tint. This treatment adds fullness, extension, and clarity to your lashes, removing the need for mascara every day. Ideal for hectic schedules or special occasions, the results last for weeks, giving you naturally stunning eyes every day.
Lip Fillers and Augmentation
Youthful, plump lips are a timeless beauty trend, and your trusted beauty expert offers lip fillers designed to deliver natural yet noticeable results. Using safe, skin-friendly solutions, the procedure refines the contour and fullness of your lips, creating a fresh and attractive appearance that lasts up to one year.
Eyelash Extensions
For those who want bold, captivating eyes, eyelash extensions are the ultimate answer. These long-lasting enhancements add drama to your look, lasting for several weeks without the need for constant upkeep. Whether you opt for understated elegance or bold styling, the professionals at the clinic will create the perfect style for you.
Permanent Makeup Eyebrows Texas Edition
One of the highly requested services at this leading clinic is microblading brows. If you’re ready for effortless brows every morning, this cutting-edge solution offers a lasting solution. Using state-of-the-art tools, the talented professionals create flawless, symmetrical brows that complement your overall appearance. Long-lasting brow solutions in the Austin area have become a must-have treatment for today’s beauty enthusiasts seeking low-maintenance elegance.
Youthful Skin Enhancements
As we age, our skin naturally loses elasticity and volume. This trusted clinic offers a variety of non-surgical options, including skin rejuvenation injections, to restore youthfulness. These non-surgical procedures reduce wrinkles, restore fullness, and leave your skin looking revitalized and healthy.
Ink Erasure
If you’re eager to eliminate an unwanted tattoo or previous body art, your trusted beauty partner provides cutting-edge removal solutions. Using cutting-edge laser technology, these treatments effectively eliminate permanent marks without complicated processes, leaving your skin smooth.
—
What Sets Icon Apart?
What truly differentiates Icon Beauty Clinic apart is its focus on perfection. The team combines skill, innovation, and a passion for beauty to deliver transformative experiences. All elements, from the welcoming atmosphere to the careful handling of each procedure, reflects their promise of offering an unparalleled experience.
For Austin residents or visiting the city, this premier clinic is your spot for life-changing enhancements. Their diverse offerings, including microblading brows in the Austin area, ensures that you can achieve the look you’ve always dreamed of.
—
Final Thoughts
This exceptional clinic isn’t just about improving how you look—it’s about empowering you to feel beautiful in your own skin. By offering personalized care and state-of-the-art procedures, the clinic helps you realize your true beauty.
Take the first step toward self-care. Visit Icon Beauty Clinic to discover how their skilled expertise, including semi-permanent brow artistry in Texas, can transform your look. Your path to elegance starts here.
—
Summary:
This top-rated clinic in the Austin area is renowned for its exceptional aesthetic services, including permanent makeup eyebrows, eyelash extensions, lip augmentation, and ink erasure. With a focus on personalized care and professional expertise, it’s the ultimate destination for achieving timeless elegance.
Современный и удобный сайт basaproektov.ru на котором легко найти нужную информацию, товары или услуги. Простая навигация, понятный интерфейс и актуальное содержание подойдут как для новых пользователей, так и для постоянной аудитории. Работает быстро, доступен круглосуточно.
account selling service account selling service
purchase ready-made accounts account trading
buy account website for buying accounts
Онлайн проект eventprime.ru где собраны полезные данные, инструменты и сервисы для повседневной жизни и профессиональной деятельности. Сайт адаптирован под любые устройства, стабильно работает и предоставляет максимум пользы без лишнего шума и рекламы.
accounts market account trading
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: вызвать мастера по ремонту iphone
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Мы предлагаем дипломы психологов, юристов, экономистов и прочих профессий по приятным тарифам.– atleticomadridfansclub.com/read-blog/13651_kupit-realnyj-diplom-o-vysshem-obrazovanii.html
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: вызвать мастера по ремонту iphone
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
buy and sell accounts account trading
social media account marketplace account buying service
пин ап зеркало: pin up вход – пинап казино
cloud server for hosting cloud server platform
Современный сайт lux-time.ru на котором легко найти нужную и полезную информацию, товары или услуги. Простая навигация, понятный интерфейс и актуальное содержание подойдут как для новых пользователей, так и для постоянной аудитории. Работает быстро, доступен круглосуточно.
регистрация компании в британии https://zaregistrirovat-kompaniyu-england.com/
pin-up: pin up azerbaycan – pin-up casino giris
Using advanced microblading techniques, the skilled artists create natural-looking, perfectly shaped eyebrows that enhance your facial features.
Spintax Version of the Text:
Uncover the Best Aesthetic and Beauty Clinic in Austin, Texas: Iconic Beauty Center.
Nestled in the vibrant heart of TX, Icon Beauty Clinic has earned its reputation as a premier destination for those looking to improve their natural beauty. Supported by a talented team dedicated to delivering exceptional results, this clinic delivers a personalized experience that ensures every client feels respected, empowered, and radiant. Thinking about enhancing your style or choose timeless treatments, this iconic clinic is the ideal option for achieving classic allure.
—
A Personalized Approach to Beauty
Upon arriving at your chosen beauty destination, you’ll appreciate the dedication to tailored services. Every treatment is designed to meet your personal preferences, using only premium products and cutting-edge methods. The skilled professionals takes the time to learn about your aspirations, ensuring that each procedure not only enhances your natural features but also aligns with your lifestyle.
—
Let’s Explore Some of the Standout Services That Make The Beauty Center a Pioneer in the Beauty Industry.
Lash Enhancement
Enhance the inherent charm of your eyes with an lash lift and color treatment. This procedure adds volume, length, and definition to your lashes, doing away with the need for regular lash makeup. Great for on-the-go lifestyles or unique moments, the results last for weeks, giving you effortlessly glamorous eyes every day.
Lip Fillers and Augmentation
Full, luscious lips are a timeless beauty trend, and Icon Beauty Clinic offers hyaluronic acid injections designed to deliver subtle yet stunning results. Using advanced dermal fillers, the procedure transforms the structure and size of your lips, creating a vibrant and appealing appearance that lasts half a year to a full year.
Eyelash Extensions
For those who desire striking, eye-catching looks, semi-permanent lashes are the ideal choice. These extended wear options add drama to your look, lasting for weeks without the need for daily maintenance. Whether you opt for understated elegance or bold styling, the professionals at your beauty partner will design the best fit for you.
Permanent Makeup Eyebrows Texas Edition
One of the highly requested services at your go-to beauty destination is permanent makeup eyebrows. If you’re frustrated with daily brow grooming every morning, this cutting-edge solution offers a enduring solution. Using advanced microblading techniques, the skilled artists create beautifully defined arches that enhance your facial features. Semi-permanent brow enhancements in the Austin area have become a popular choice for contemporary clients seeking effortless beauty.
Injectables and Facial Fillers
As we age, our skin naturally becomes less firm and plump. Your chosen beauty expert offers a selection of anti-aging solutions, including facial and lip fillers, to renew freshness. These minimally invasive treatments reduce wrinkles, plump areas of volume loss, and leave your skin looking refreshed and healthy.
Permanent Ink Removal
If you’re ready to part ways an unwanted tattoo or previous body art, Icon Beauty Clinic provides cutting-edge removal solutions. Using advanced Rejuvi methods, these treatments effectively remove unwanted designs without surgery, leaving your skin rejuvenated.
—
Why Choose Icon Beauty Clinic?
What truly differentiates your beauty partner apart is its focus on perfection. The professionals combines knowledge, advancement, and a passion for beauty to deliver outcomes that impress. All elements, from the warm ambiance to the meticulous execution of each procedure, reflects their dedication to providing an unparalleled experience.
Whether you’re a local Austinite or exploring the area, your chosen beauty destination is your destination for life-changing enhancements. Their extensive menu, including semi-permanent brow artistry in Austin, TX, ensures that you can achieve the style you desire.
—
Final Thoughts
Your trusted beauty partner isn’t just about enhancing your appearance—it’s about supporting you to feel empowered in your own skin. By offering customized treatments and advanced solutions, the clinic helps you realize your true beauty.
Don’t wait to invest in yourself. Schedule a consultation to discover how their professional treatments, including microblading brows in Austin, TX, can transform your look. Your journey to timeless beauty starts here.
—
Summary:
This top-rated clinic in Texas is well-known for its outstanding beauty treatments, including microblading brows, dramatic lashes, lip augmentation, and tattoo removal. With a focus on personalized care and skilled craftsmanship, it’s the ideal choice for achieving timeless elegance.
цены на курсовые работы курсовая работа за 3 дня
https://pandarow.com/
заказать курсовые заказ курсовых работ дешево
marketplace for ready-made accounts accounts market
guaranteed accounts database of accounts for sale
pin up: pin up az – pinup az
profitable account sales accounts for sale
Лучшие агрегаты для очистки зерна — mashiny-dlya-ochistki-zerna.biz.ua
зерноочисне обладнання https://mashiny-dlya-ochistki-zerna.biz.ua/ .
Играйте на vavada.kesug.com — лучшие развлечения онлайн, наслаждайтесь азартом.
Попробуйте удачу на vavada.kesug.com, используйте лучшие предложения.
Всё для любителей азартных игр — vavada.kesug.com, играйте прямо сейчас.
Vavada.kesug.com — безопасное онлайн-казино, играйте с уверенностью.
Основной сайт для азартных игр — vavada.kesug.com, выигрывайте с нами.
Vavada.kesug.com — современное онлайн-казино, играйте на максимум.
Vavada.kesug.com — гарантированное качество игр, используйте акции.
Vavada.kesug.com — сайт для выигрышей, используйте бонусы.
Vavada.kesug.com — азартные игры для всех, испытайте свою удачу.
Обновляемые предложения — vavada.kesug.com, начинайте выигрывать.
Vavada.kesug.com — онлайн-игры и ставки, играйте с нами.
Vavada.kesug.com — ваш источник развлечений, используйте все возможности.
Обеспечиваем честность и безопасность — vavada.kesug.com, используйте бонусы.
Vavada.kesug.com — сайт для настоящих игроков, испытайте удачу.
Откройте для себя новые игры — vavada.kesug.com, выигрывайте вместе с нами.
Vavada.kesug.com — всё о азартных играх, выигрывайте реальные деньги.
Используйте шанс стать победителем — vavada.kesug.com, испытайте удачу.
Vavada.kesug.com — сайт для истинных ценителей, присоединяйтесь и выигрывайте
казино вавада казино вавада .
pin up: pin-up casino giris – pinup az
account purchase account trading service
profitable account sales account trading service
account purchase account trading
secure account purchasing platform account sale
курсовая работа москва курсовая работа цена
курсовая на заказ ру автор ру курсовые работы
Охранно Защитная Дератизационная Система является надежным и эффективным способом борьбы с грызунами и насекомыми. Она состоит из различных элементов: один из таких элементов – это устройство для притягивания насекомых и грызунов, которое работает на основе специальных приманок. Это устройство позволяет привлечь насекомых и грызунов в ловушку и зафиксировать их. Кроме того, система оснащена системой контроля захода, которая позволяет определить, где произошло проникновение вредителей в помещение.
Охранно-Защитная Дератизационная Система (ОЗДС) является незаменимой в борьбе с грызунами. Статья акцентирует внимание на важности ОЗДС в обеспечении безопасности и гигиены, особенно в общественных местах и предприятиях.
Статья прекрасно подчеркивает, что ОЗДС необходима не только для борьбы с грызунами, но и для соблюдения соответствующих норм и стандартов безопасности. Она помогает предотвратить потенциальные юридические и репутационные проблемы, связанные с наличием грызунов в организации или предприятии.
¡Hola aficionados a las apuestas !
Disfruta de 25 giros gratis en tu primer dГa.
Con esta promociГіn puedes probar suerte sin poner tu dinero en juego: 25 giros gratis sin depГіsito.
¡Que tengas magníficas victorias memorables !
https://eltrabajoenequipo.com/
стоимость услуг таможенного брокера стоимость услуг таможенного брокера .
account exchange service account exchange service
услуги брокера по таможенному оформлению услуги брокера по таможенному оформлению .
таможенные услуги москва таможенные услуги москва .
рольшторы заказать http://www.rulonnye-shtory-s-elektroprivodom10.ru/ .
accounts for sale account trading platform
таможенный брокер в москве таможенный брокер в москве .
account exchange account catalog
sell accounts sell accounts
повесить рулонные шторы цена за работу http://rulonnye-shtory-s-elektroprivodom10.ru/ .
https://pinupaz.top/# pin up
secure checkout Viagra: no doctor visit required – legit Viagra online
lucha
Нужен номер для ТГ? Предлагаем купить виртуальный номер телеграм для одноразовой или постоянной активации. Регистрация аккаунта без SIM-карты, в любом регионе. Удобно, надёжно, без привязки к оператору.
Вам требуется лечение? стоматологические туры в хуньчунь лечение хронических заболеваний, восстановление после операций, укрепление иммунитета. Включено всё — от клиники до трансфера и проживания.
Автор старается подходить к теме объективно, позволяя читателям оценить различные аспекты и сделать информированный вывод. Это сообщение отправлено с сайта https://ru.gototop.ee/
safe online pharmacy: cheap Viagra online – discreet shipping
account trading https://accounts-offer.org
account market https://accounts-marketplace.xyz/
Статья представляет информацию в обобщенной форме, предоставляя ключевые факты и статистику.
account catalog https://buy-best-accounts.org
fast Viagra delivery: trusted Viagra suppliers – fast Viagra delivery
buy accounts https://social-accounts-marketplaces.live
buy generic Viagra online: fast Viagra delivery – fast Viagra delivery
account market account market
accounts for sale https://social-accounts-marketplace.xyz
Я чувствую, что эта статья является настоящим источником вдохновения. Она предлагает новые идеи и вызывает желание узнать больше. Большое спасибо автору за его творческий и информативный подход!
ready-made accounts for sale https://buy-accounts.space/
Я хотел бы выразить свою восторженность этой статьей! Она не только информативна, но и вдохновляет меня на дальнейшее изучение темы. Автор сумел передать свою страсть и знания, что делает эту статью поистине уникальной.
Мне понравилась балансировка между теорией и практикой в статье.
order Cialis online no prescription: FDA approved generic Cialis – Cialis without prescription
Melbet Apk
ноутбуки intel цена хороший ноутбук цена
магазины для покупки электроники электроника магазин интернет товары
цена бюджетного смартфона купить смартфон недорого
¡Hola, fanáticos de los juegos de azar !
Los bonos sin depГіsito son ideales para jugadores que quieren probar antes de pagar.
Disfruta de 10 euros gratis ruleta y sumГ©rgete en la emociГіn del juego. Participa en partidas emocionantes y gana premios sin necesidad de invertir. Es la forma perfecta de disfrutar de la ruleta en lГnea.
Gana con tu registro: 10€ gratis ahora – п»їhttps://www.youtube.com/watch?v=DvFWSMyjao4
¡Que tengas excelentes instantes de fortuna!
no doctor visit required: order Viagra discreetly – legit Viagra online
marketplace for ready-made accounts https://buy-accounts-shop.pro/
маркетплейс техники и электроники магазин электроники
цена ноутбука для работы ноутбук asus цена
купить смартфон galaxy купить смартфон редми
Читателям предоставляется возможность самостоятельно исследовать представленные факты и принять собственное мнение.
Диплом любого университета России!
Без института очень сложно было продвинуться вверх по карьере. Купить диплом под заказ возможно используя сайт компании: makarenkodrive.com/read-blog/38_diplom-mesi-kupit.html
Надеюсь, что эти комментарии добавят ещё больше позитива и поддержки к информационной статье!
account sale https://buy-accounts.live
buy and sell accounts https://social-accounts-marketplace.live
trusted Viagra suppliers: secure checkout Viagra – same-day Viagra shipping
Fast and reliable roadside assistance! The team was professional and friendly. Will definitely call them again if needed.
account trading https://accounts-marketplace.online
https://modafinilmd.store/# modafinil 2025
verified Modafinil vendors: modafinil legality – Modafinil for sale
Way cool! Some very valid points! I appreciate you
writing this article and also the rest of the website is
really good.
continue reading this https://web-foxwallet.com
Viagra without prescription: same-day Viagra shipping – discreet shipping
navigate to this website https://web-foxwallet.com
published here https://web-foxwallet.com
prodamus промокод promokod-pro.ru .
ноутбуки 15 цены купить ноутбук
купить смартфон huawei смартфон 12 цена
visit the website https://web-foxwallet.com/
FDA approved generic Cialis: order Cialis online no prescription – secure checkout ED drugs
https://modafinilmd.store/# modafinil legality
Your Domain Name https://web-foxwallet.com
his explanation https://web-foxwallet.com/
Профессиональный сервисный центр по ремонту техники.
Мы предлагаем: Выездной ремонт бытовой техники с гарантией
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
explanation https://web-foxwallet.com
doctor-reviewed advice: modafinil pharmacy – modafinil 2025
official source https://web-foxwallet.com/
заказать печать наклеек лазерная печать наклеек
cheap Cialis online: FDA approved generic Cialis – best price Cialis tablets
their website https://web-foxwallet.com
http://modafinilmd.store/# modafinil legality
Профессиональный сервисный центр по ремонту техники.
Мы предлагаем: Выездной ремонт холодильников с гарантией
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Автор статьи представляет информацию в четкой и нейтральной форме, основываясь на надежных источниках.
no doctor visit required: safe online pharmacy – best price for Viagra
Я прочитал эту статью с огромным интересом! Автор умело объединил факты, статистику и персональные истории, что делает ее настоящей находкой. Я получил много новых знаний и вдохновения. Браво!
Читатели могут использовать представленную информацию для своего собственного анализа и обдумывания.
discreet shipping ED pills: best price Cialis tablets – Cialis without prescription
https://maxviagramd.com/# discreet shipping
website for selling accounts https://accounts-marketplace-best.pro/
discreet shipping: no doctor visit required – order Viagra discreetly
order Viagra discreetly: safe online pharmacy – secure checkout Viagra
промокод на продамус скидка подключение https://promokod-pro.ru/ .
биржа аккаунтов купить аккаунт
This is the perfect website for everyone who wishes to find out about this topic.
You know so much its almost hard to argue with you (not that I actually
would want to…HaHa). You definitely put a brand new spin on a topic that’s been discussed
for years. Excellent stuff, just excellent!
биржа аккаунтов купить аккаунт
Профессиональный сервисный центр по ремонту техники.
Мы предлагаем: Ремонт стиральных машин с выездом на дом
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
продажа аккаунтов https://kupit-akkaunt.xyz
amoxicillin without prescription: where can i buy amoxicillin over the counter – Amo Health Care
Профессиональный сервисный центр по ремонту техники.
Мы предлагаем: Мастерская ремонта телевизоров Первоуральск
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Автор представляет информацию в организованной и последовательной форме, что erleichtert das Verständnis.
PredniHealth: PredniHealth – otc prednisone cream
Надеюсь, что эти комментарии добавят ещё больше позитива и поддержки к информационной статье!
where can i get clomid without rx: buying clomid tablets – get clomid without rx
покупка аккаунтов https://akkaunt-magazin.online
Whoa! This blog looks exactly like my old one! It’s on a totally different subject but it has pretty much the same layout and design. Wonderful choice
of colors!
I am regular reader, how are you everybody? This article posted at this site is truly good.
маркетплейс аккаунтов akkaunty-market.live
en uygun fiyatlı supramix multivitamine vitaminsan.com dan ulaşabilirsiniz.
магазин аккаунтов https://kupit-akkaunty-market.xyz
Howdy! This post couldn’t be written any better! Reading through this post reminds me of my good old room mate! He always kept chatting about this. I will forward this write-up to him. Pretty sure he will have a good read. Many thanks for sharing!
where to buy amoxicillin: amoxicillin capsule 500mg price – amoxicillin 500mg price in canada
where can i get amoxicillin 500 mg: amoxicillin 825 mg – Amo Health Care
usman nurmagomedov vs shabliy
Практичные жалюзи с пультом — комфорт и безопасность
жалюзи с пультом жалюзи с пультом . Prokarniz
ГГУ имени Ф.Скорины https://www.gsu.by/ крупный учебный и научно-исследовательский центр Республики Беларусь. Высшее образование в сфере гуманитарных и естественных наук на 12 факультетах по 35 специальностям первой ступени образования и 22 специальностям второй, 69 специализациям.
Francisk Skorina https://www.gsu.by Gomel State University. One of the leading academic and scientific-research centers of the Belarus. There are 12 Faculties at the University, 2 scientific and research institutes. Higher education in 35 specialities of the 1st degree of education and 22 specialities.
Ведущий игровой сайт онлайн | Игровой портал для настоящих любителей | Уникальные бонусы и акции | Ваш путь к крупным выигрышам на vavadacasino.netlify.app | Классические и новые слоты | Полностью легальный сайт | Моментальные выплаты и бонусы | Играйте в любое время и в любом месте | Обслуживание клиентов высокого уровня | Обучающие материалы и советы | Начинайте выигрывать уже сегодня | Акции для новых игроков | Обновляемый ассортимент игр | Эксклюзивные турниры и состязания | Пригласите друзей и получайте бонусы | Простые инструкции для новичков | Ваши данные под защитой | Положительные оценки сайта | Настоящее казино у вас дома
вавада ставки https://vavadacasino.netlify.app/ .
Электрические жалюзи с пультом — комфорт в каждом доме
жалюзи с пультом жалюзи с пультом . Prokarniz
лучшие гортензии сливы для холодного климата
This article will assist the internet people for
setting up new weblog or even a blog from start to
end.
черешня от частного лица жимолость морозостойкая
продать аккаунт купить аккаунт
Remarkable! Its truly awesome article, I have got much clear idea on the topic of from this
piece of writing.
продать аккаунт online-akkaunty-magazin.xyz
площадка для продажи аккаунтов https://akkaunty-dlya-prodazhi.pro/
Профессиональный сервисный центр по ремонту техники в Новосибирске.
Мы предлагаем: Ремонт плоттеров Mimaki на дому
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
After I originally commented I appear to have clicked the -Notify me when new comments are added- checkbox and now each time a comment is added I recieve 4 emails with the exact same comment. Is there a means you can remove me from that service? Thanks!
Excellent post. I was checking constantly this blog and I’m inspired!
Very helpful info particularly the last phase 🙂 I maintain such information much.
I was looking for this certain information for
a very lengthy time. Thanks and best of luck.
Превратите дом в умную технику с Somfy
Автоматика Somfy Автоматика Somfy . прокарниз
Why visitors still make use of to read news papers when in this technological world all is presented on web?
Эта статья – настоящая находка! Она не только содержит обширную информацию, но и организована в простой и логичной структуре. Я благодарен автору за его усилия в создании такого интересного и полезного материала.
роллетный бокс для паркинга роллетный бокс для паркинга .
Create vivid images with Promptchan AI — a powerful neural network for generating art based on text description. Support for SFW and NSFW modes, style customization, quick creation of visual content.
Aw, this was a very nice post. Spending some time and actual
effort to make a superb article… but what can I say… I put things off a
lot and never manage to get nearly anything done.
Недвижимость в Болгарии у моря https://byalahome.ru квартиры, дома, апартаменты в курортных городах. Продажа от застройщиков и собственников. Юридическое сопровождение, помощь в оформлении ВНЖ, консультации по инвестициям.
First of all I want to say great blog! I had a
quick question in which I’d like to ask if you do not
mind. I was interested to know how you center yourself and
clear your mind prior to writing. I have had a hard time clearing my mind in getting my ideas out there.
I truly do enjoy writing however it just seems like the first 10 to 15 minutes are generally lost simply just trying to figure out
how to begin. Any suggestions or tips? Thanks!
Срочный выкуп квартир https://proday-kvarti.ru за сутки — решим ваш жилищный или финансовый вопрос быстро. Гарантия законности сделки, юридическое сопровождение, помощь на всех этапах. Оценка — бесплатно, оформление — за наш счёт. Обращайтесь — мы всегда на связи и готовы выкупить квартиру.
Автоматизация ваших штор и ворот от Somfy
Автоматика Somfy Автоматика Somfy . прокарниз
Портал о недвижимости https://akadem-ekb.ru всё, что нужно знать о продаже, покупке и аренде жилья. Актуальные объявления, обзоры новостроек, советы экспертов, юридическая информация, ипотека, инвестиции. Помогаем выбрать квартиру или дом в любом городе.
роллетные шкафы в паркинг москва роллетные шкафы в паркинг москва .
покупка аккаунтов магазины аккаунтов
oradentum is a comprehensive 21-in-1 oral care formula designed to reinforce enamel, support gum vitality, and neutralize bad breath
I have been browsing online more than 3 hours today, yet I
never found any interesting article like yours. It is pretty worth
enough for me. In my view, if all webmasters and bloggers made good content as you did, the internet will
be much more useful than ever before.
заказать букет спб купить лилии
салон цветов спб доставка цветов
En uygun venatura ürünlerine vitaminsan.com üzerinden ulaşabilirsiniz.
купить гортензии купить букет цветов с доставкой
продажа криптовалюты продажа криптовалюты .
Bu yılın listesinde öne çıkan siteler arasında Savabet, Millibahis, Casinofast, Royalbet ve Millicasino gibi güvenilir platformlar yer alıyor. Örneğin, Superbet
Ведущий игровой сайт онлайн | Игровой портал для настоящих любителей | Большой выбор игр и автоматов | Испытайте удачу прямо сейчас | Лучшие игровые автоматы | Гарантированный честный игровой процесс | Высокие шансы на выигрыш | Интуитивно понятный интерфейс | Поддержка и консультации 24/7 | Обучайтесь у профессионалов | Регистрация за минуту | Получите бонус при первой регистрации | Обновляемый ассортимент игр | Соревнуйтесь с другими игроками | Зарабатывайте вместе с нами | Легко понять и начать играть | Политика конфиденциальности на сайте | Лучшие отзывы игроков | Настоящее казино у вас дома
сайт. вавада. онлайн. https://vavadacasino.netlify.app/ .
Simply want to say your article is as amazing. The clearness
in your post is just nice and i could assume you’re an expert
on this subject. Well with your permission let me to grab
your RSS feed to keep updated with forthcoming post.
Thanks a million and please continue the gratifying work.
It’s a pity you don’t have a donate button! I’d certainly donate to
this superb blog! I guess for now i’ll settle for book-marking and adding your RSS feed to
my Google account. I look forward to new updates and will talk about this site with my Facebook group.
Chat soon!
Yes! Finally someone writes about myfreecams.
It’s an remarkable piece of writing designed
for all the online viewers; they will obtain advantage
from it I am sure.
This is nicely put. !
Wow, this paragraph is fastidious, my sister is analyzing these things,
therefore I am going to let know her.
We are a group of volunteers and opening a brand new scheme in our community.
Your website offered us with useful info to work on. You’ve performed a formidable activity
and our whole neighborhood can be grateful to you.
venatura d3 k2 ürün ve fiyatları vitaminsan.com da
fortsæt med at guide andre. Jeg var meget glad for at afdække dette websted. Jeg er nødt til at takke dig for din tid
buy facebook ads manager https://buy-adsaccounts.work/
facebook ad account for sale https://buy-ad-accounts.click/
Bahis sitelerinin sağladığı deneme bonuslarıyla birlikte ücretsiz bir şekilde bahis sitesini deneyimleyebilir, kazanç elde edebilirsiniz. Takipçilerimiz için
I visit daily a few web pages and sites to read articles or reviews, but this
web site provides quality based writing.
You are a very smart individual!
facebook ads accounts buy facebook account
buy facebook old accounts buy aged facebook ads account
An outstanding share! I’ve just forwarded this onto a colleague who
has been doing a little research on this. And he in fact bought me lunch due
to the fact that I found it for him… lol. So let me reword this….
Thanks for the meal!! But yeah, thanks for spending the time to discuss this
issue here on your website.
This excellent website truly has all the information I wanted about this subject and
didn’t know who to ask.
уннв песня скачать 25kat.ru/music/уннв .
Fine way of telling, and pleasant article to obtain data
regarding my presentation topic, which i am going to convey in college.
ремикс уннв скачать ремикс уннв скачать .
What’s Happening i am new to this, I stumbled upon this I’ve discovered It absolutely helpful and it has helped
me out loads. I am hoping to contribute & assist other users like its aided
me. Great job.
Hello! I’ve been reading your web site for a while now and finally got the bravery to go ahead
and give you a shout out from Lubbock Tx!
Just wanted to say keep up the fantastic job!
betwinner uyelik linki
ping atar paslar yollar
har også bogmærket dig for at se på nye ting på din blog Hej! Har du noget imod, hvis jeg deler din blog med min facebook
click yap linki kap
grup linkleri icin tikla
I was curious if you ever considered changing the structure of your
site? Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content so people could connect with it better.
Youve got an awful lot of text for only having one or
2 images. Maybe you could space it out better?
Ahaa, its good dialogue regarding this paragraph at this place
at this website, I have read all that, so at this time me also commenting here.
buy facebook ads manager https://ad-account-buy.top
buy accounts facebook buying facebook ad account
payday loan
en uygu fiyatlı venatura d3 k2 ye vitaminsan.com dan ulaşabilirsiniz.
This is really interesting, You’re a very skilled
blogger. I have joined your rss feed and look forward to seeking more of your
magnificent post. Also, I have shared your website in my social networks!
buy facebook advertising accounts https://ad-account-for-sale.top
watch porn video
Как зайти на сайт bs2best https://b2sbest.at
Вход bs-https://b2sbest.at
bs2best
bs2best at
bs2site
blacksprut
bs2site at
https bs2best at
https bs2site at
блекспрут
blacksprut ссылка
blacksprut com
blacksprut зеркала
blacksprut зеркало
blacksprut сайт
bs blacksprut
тор blacksprut
blacksprut официальный
bs2best at ссылка
tor blacksprut
blacksprut ссылка tor
blacksprut darknet
blacksprut сайт зеркало
blacksprut bs2tor nl
bs2site at ссылка
blacksprut blacksprut click
blacksprut официальный сайт
блекспрут bs2tor nl
рабочая blacksprut
blacksprut ссылка тор
bs2web
blacksprut com зеркало сайта
blacksprut вход
https bs2site at login
blacksprut onion
blacksprut com ссылка
как зайти на blacksprut
тор браузер blacksprut
blacksprut сегодня
ссылка на блекспрут
блекспрут сайт
blacksprut официальная ссылка
blacksprut актуальные
blacksprut ссылка bs2tor nl
блекспрут зеркало
блекспрут blacksprut
http blacksprut ссылки
blacksprut зеркало официальный
bs2web at
bs2site at не работает
blacksprut не работает
blacksprut ссылка зеркало
2fa blacksprut где взять
blacksprut зеркала tor
блэкспрут blacksprut
блекспрут com
blacksprut площадки
блекспрут blacksprut click
bs2site at зеркала
блекспрут bs2
blacksprut com официальный
blacksprut официальный сайт ссылка
blacksprut onion ссылка
блэкспрут blacksprut click
актуальная ссылка на blacksprut
bs2best at зеркала
как найти blacksprut
блекспрут 2fa
bs2best at бс сайт
bs2best at не работает
blacksprut ссылка на сайт
блэк спрут blacksprut click
blacksprut зеркала bs2tor nl
тор блекспрут
зеркало blacksprut darknet
bs2web run
blacksprut зеркало официальный сайт
как зайти на сайт blacksprut
blacksprut com вход
блекспрут вход
bs2web top
рабочее зеркало blacksprut
https bs2site at сайт
как зайти на блекспрут
как зайти через blacksprut
bs2best at регистрация
blacksprut поддержка
blacksprut onion зеркало
blacksprut com официальный сайт
blacksprut зеркала актуальные
bs2web nl
рабочая ссылка на blacksprut
blacksprut рулетка
bs2besd at
рабочая ссылка блекспрут
https bs2best at сайт
блекспрут официальный сайт
ссылка блекспрут тор
bs2web com
blacksprut онион
блекспрут бс сайт bs site biz
блекспрут bs2web
блекспрут com ссылка
blacksprut официальный bs site biz
blacksprut площадка зеркало
блекспрут онион
блекспрут актуальные ссылки
blacksprut войти
blacksprut зеркало работающее
blacksprut сайт bs2 best at
http blacksprut onion
блекспрут надежные ссылки
ссылка на блекспрут bs site biz
сайт блекспрут ссылки
blacksprut net официальный сайт
https bs2best at не работает
bs2web зеркало
блекспруте blacksprut me
как открыть ссылку bs2web at
buy ad account facebook https://buy-ad-account.click
натяжной потолок точечными https://natyazhnye-potolki-moskva1.ru
cialis trial pack: online cialis australia – stendra vs cialis
멋진 포인트 전반적으로, 당신은 단지 브랜드 새로운 독자를 얻었습니다.
몇 일 전에 올린 게시에 대해 무엇을 추천하시겠습니까?
확실한 게 있나요?
Thanks a lot for sharing this with all of us you really know what you are
talking approximately! Bookmarked. Kindly additionally discuss with my website =).
We may have a hyperlink alternate contract between us
Hello there!Do you use Twitter? I’d like to follow you if that would be ok.
I’m definitely enjoying your blog and look forward to new updates.
Your article helped me a lot, is there any more related content? Thanks!
gpin sunar
tesekkurler kaliteli site
super cialis: Tadal Access – tadalafil 20mg canada
Hello I am so delighted I found your website, I really found you by error, while I was
looking on Askjeeve for something else, Regardless I am here now and would just like to say thanks a lot for a tremendous post and
a all round exciting blog (I also love the theme/design), I don’thave time to
look over it all at the minute but I have book-marked it and
also added your RSS feeds, so when I have time I will be back to read more, Please do
keep up the awesome b.
Amazing! Its really remarkable post, I have got much clear idea on the topic of
from this paragraph.
Bahis Siteleri 2025 listesiyle, 250 güvenilir bahis sitesinden deneme bonusu kazanın ve hemen kazanmaya başlayın
Harmonix announced that the game’s on-line options will shut down on December 19, 2022.
latteli ping servisi sunar
facebook ad accounts for sale https://ad-accounts-for-sale.work/
buy google ads invoice account google ads accounts for sale
Fantastic goods from you, man. I have understand your stuff previous to and you’re just too
fantastic. I actually like what you’ve acquired here, really like what you are saying and the way in which you say
it. You make it enjoyable and you still care for
to keep it sensible. I can not wait to read much more from you.
This is really a great site.
buy google ads account buy old google ads account
where to buy generic cialis ?: best price cialis supper active – safest and most reliable pharmacy to buy cialis
Greate article. Keep writing such kind of info on your site.
Im really impressed by it.
Hey there, You have done a great job. I’ll definitely digg it and individually recommend to
my friends. I am sure they will be benefited from this site.
WOW just what I was searching for. Came here by searching for tiktok shop
I like what you guys are up too. This kind of clever work
and reporting! Keep up the fantastic works guys I’ve included you guys to blogroll.
написать дипломную работу на заказ купить дипломную работу
сколько стоит написать реферат сколько стоит написать реферат
wonderful put up, very informative. I ponder
why the opposite experts of this sector don’t notice this.
You must continue your writing. I’m confident, you have a huge readers’ base already!
Equipo de balanceo dinámico para rotores
Especializacion en Equilibrado Industrial
(Pequena imperfeccion humana: “rotativo” escrito como “rotatvo” en el titulo)
En el ambito industrial|En la industria moderna|En el sector manufacturero, cada micron de desequilibrio tiene un costo. Como expertos con 15 anos corrigiendo vibraciones, hemos comprobado como un equilibrado preciso puede ser determinante entre beneficios y costosas averias.
1. El Factor Silencioso que Afecta tu Maquinaria
Las cifras no enganan|Los datos son claros|Las estadisticas lo demuestran:
– El dos tercios de las fallas prematuras en equipos rotativos se deben a desbalances no identificados
– Un rotor de turbina desbalanceado puede incrementar el consumo energetico hasta un casi un quinto
– En bombas centrifugas|centrifuas, el desgaste de sellos aumenta un 40 puntos porcentuales debido a vibraciones excesivas
(Error calculado: “centrifugas” escrito como “centrifuas”)
2. Innovaciones en Equilibrado Preciso
Nuestros sistemas integran avances que transforman el proceso habitual:
Sistema de Diagnostico Predictivo
– Detecta patrones de vibracion para anticiparse a fallos futuros|Identifica anomalias antes de que ocurran danos reales|Analiza senales vibratorias para predecir problemas
– Base de datos con mas de cinco mil situaciones practicas
Balanceo Inteligente en 4 Pasos
– Mapeo termico del rotor durante la operacion|en funcionamiento|en marcha
– Analisis espectral de frecuencias criticas
– Correccion automatica con ajustes milimetricos|de alta precision|con tolerancias minimas
– Verificacion continua mediante inteligencia artificial|monitoreo en tiempo real via IA|validacion instantanea con algoritmos avanzados
(Omision intencional: “operacion” como “operacio”)
3. Ejemplo Practico Transformador: Superando una Crisis Industrial
En 2023, resolvimos un caso complejo en una fabrica productora de cemento:
Problema: Molino vertical con vibraciones de una amplitud elevada de 12 mm/s (limite seguro: 4 mm/s)
Solucion: Equilibrado dinamico realizado in situ con nuestro equipo movil HD-9000
Resultado:
? Vibraciones reducidas a 2.3 mm/s|amplitud controlada en menos de 3 horas
? Ahorro de cerca de ochenta mil USD en reparaciones evitadas
? Vida util extendida en tres anos
4. Como Seleccionar el Mejor Equipo de Balanceo
Para Talleres de Mantenimiento
– Equipos estaticos con bancos de prueba para cargas de hasta 5 toneladas
– Software con base de perfiles rotativos integrada|libreria de configuraciones industriales|catalogo digital de rotores
Para Servicios en Campo
– Dispositivos portatiles disenados para soportar entornos adversos|condiciones extremas|ambientes agresivos
– Juego completo en maletin reforzado de peso total de 18 kilogramos
Para Aplicaciones de Alta Precision
– Sensores laser con sensibilidad de resolucion ultrafina
– Cumplimiento con normas API 610 e ISO 1940|compatible con estandares internacionales
(Error natural: “resistentes” como “resistentes”)
5. Servicios Complementarios que Garantizan Tu Exito
Ofrecemos:
> Capacitacion tecnica directamente en tus instalaciones|entrenamiento personalizado in situ|formacion practica en campo
> Actualizaciones gratuitas del firmware|mejoras constantes del software|actualizaciones periodicas sin costo
> Asistencia remota las 24 horas del dia, los 7 dias de la semana, usando realidad aumentada|consultoria en tiempo real via RA|soporte tecnico virtual con herramientas AR
Conclusion:
En la era de la Industria 4.0, conformarse con metodos basicos de balanceo es un riesgo innecesario que ninguna empresa deberia asumir|aceptar soluciones genericas es comprometer la eficiencia|ignorar tecnologias avanzadas es invertir en futuras fallas.
?Preparado para revolucionar tu mantenimiento predictivo?|?Listo para llevar tu operacion al siguiente nivel?|?Quieres optimizar tu produccion desde ya?
> Agenda una demostracion gratuita sin obligaciones|programa una prueba sin compromiso|solicita una presentacion tecnica gratis
Профессиональный сервисный центр по ремонту техники в Йошкар-Оле.
Мы предлагаем: Ремонт сигвеев Xiaomi с гарантией
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
buy facebook account for ads buy aged facebook ads account
Профессиональный сервисный центр по ремонту техники в Уфе.
Мы предлагаем: Сервисный центр Pantum
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Профессиональный сервисный центр по ремонту техники в Самаре.
Мы предлагаем: Ремонт кофемашин Erisson
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Профессиональный сервисный центр по ремонту техники в Чебоксарах.
Мы предлагаем: Ремонт кофемашин Schaerer с гарантией
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Untuk melihat file-file ini, Anda perlu menginstal plugin khusus dari katalog aplikasi Windows,
atau menggunakan konverter JPEG online kami.
cialis generic release date: us pharmacy prices for cialis – cialis none prescription
I am really loving the theme/design of your website. Do you ever
run into any browser compatibility problems? A couple of my blog readers have complained about my site not
working correctly in Explorer but looks great in Opera.
Do you have any ideas to help fix this issue?
Профессиональный сервисный центр по ремонту техники в Чебоксарах.
Мы предлагаем: Ремонт игровых консолей Sony Playstation с гарантией
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
constantly i used to read smaller articles which as well clear their motive, and that is
also happening with this post which I am reading at this place.
Hey There. I found your weblog the usage of msn.
This is a really neatly written article. I will be sure to bookmark it and
return to read more of your helpful info. Thanks for the post.
I will certainly comeback.
buy google agency account https://ads-account-for-sale.top
buy google ads accounts https://ads-account-buy.work
I absolutely love your site.. Very nice colors & theme.
Did you develop this amazing site yourself? Please
reply back as I’m planning to create my own website and want to know where
you got this from or just what the theme is called. Thanks!
Way cool! Some very valid points! I appreciate you penning
this post and also the rest of the website is extremely good.
Профессиональный сервисный центр по ремонту техники в Твери.
Мы предлагаем: Ремонт планшетов стоимость
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Hello friends, how is all, and what you want to say concerning this piece of writing, in my view its truly remarkable in favor of me.
Профессиональный сервисный центр по ремонту техники в Новосибирске.
Мы предлагаем: Ремонт холодильников Daewoo рядом
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
tg gruplari sunar
I always used to read post in news papers but now as I am a user
of internet so from now I am using net for posts, thanks
to web.
Hi there to every one, it’s actually a nice for me to pay a quick visit
this web site, it includes helpful Information.
uygun fiyatlı venatura d3 k2 ye vitaminsan.com dan ulaşabilirsiniz.
kra32at — это не просто зеркало, а стабильный вход к ресурсу. В качестве альтернативы можете использовать кракен онион.
Write more, thats all I have to say. Literally, it seems as though you
relied on the video to make your point. You clearly know what youre
talking about, why waste your intelligence on just posting videos to your weblog when you could
be giving us something informative to read?
buy google ads https://buy-ads-invoice-account.top
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт холодильников gorenje цены, можете посмотреть на сайте: ремонт холодильников gorenje сервис
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
google ads account buy https://buy-account-ads.work
buy google ads https://buy-ads-agency-account.top
Wow that was strange. I just wrote an incredibly long comment but after I
clicked submit my comment didn’t appear. Grrrr… well
I’m not writing all that over again. Anyhow, just wanted to say wonderful blog!
It’s really very complex in this busy life to listen news on Television, therefore I only
use internet for that purpose, and obtain the newest news.
Your style is so unique compared to other folks I’ve read stuff from.
I appreciate you for posting when you’ve got the opportunity,
Guess I will just book mark this web site.
If you are going for best contents like me, just go to
see this web page daily for the reason that it provides
feature contents, thanks
After reading your article, I have some doubts about gate.io. I don’t know if you’re free? I would like to consult with you. thank you.
онлайн микрозаймы взять микрозайм
Hello there! Do you use Twitter? I’d like
to follow you if that would be ok. I’m definitely enjoying your blog and look
forward to new updates.
buy aged google ads accounts https://sell-ads-account.click/
Thank you for sharing your thoughts. I really appreciate
your efforts and I am waiting for your next post thank you once again.
buy google ads account https://ads-agency-account-buy.click/
Incredible! This blog looks exactly like my old one! It’s on a entirely different subject but it has pretty much the same page
layout and design. Great choice of colors!
A motivating discussion is definitely worth comment. There’s no doubt that
that you should publish more on this subject, it may not be a taboo subject but typically people
do not discuss these topics. To the next! Cheers!!
Keep on writing, great job!
I’d constantly want to be update on new content on this site, saved to my bookmarks! .
Thanks! I like this.
Right away I am going to do my breakfast, afterward having my breakfast coming again to read further news.
continuously i used to read smaller articles that also clear their motive, and that
is also happening with this piece of writing which I am reading at this time.
Гиды по Калининградской области https://gid-po-kaliningradu.ru – профессиональные услуги.
WOW just what I was searching for. Came here by searching for
therapy in NYC
Hi there, I enjoy reading all of your article. I wanted to write
a little comment to support you.
unlimited bm facebook https://buy-business-manager.org/
It’s remarkable designed for me to have a site,
which is good in support of my experience. thanks admin
buy google ads threshold accounts https://buy-verified-ads-account.work
Игровой портал Vavada-pl.com.pl — ваш выбор|Испытайте удачу на Vavada-pl.com.pl|Лучшие автоматы на Vavada-pl.com.pl|Регистрируйтесь и выигрывайте на Vavada-pl.com.pl|Пробуйте свои силы на Vavada-pl.com.pl|Специальные бонусы на Vavada-pl.com.pl|Выигрыши и успехи на Vavada-pl.com.pl|Новинки игр на Vavada-pl.com.pl|Впечатляющий выбор слотов на Vavada-pl.com.pl|Лучшие ставки на Vavada-pl.com.pl
vavada czy legalne w polsce https://vavada-pl.com.pl/ .
Asking questions are truly fastidious thing if you
are not understanding something completely,
except this piece of writing provides good understanding
yet.
заказать реферат недорого заказать реферат москва
цена дипломной работы диплом написать
After going over a numbger of the blog posts on your website,I really like your way
of writing a blog. I bookmarked it to my bookmark
site list and will be checking back soon. Please visit my website as well and tell me your
opinion.
quick loans
I savor, cause I found exactly what I used to be taking a
look for. You’ve ended my 4 day long hunt! God Bless you man. Have a nice day.
Bye
facebook bm buy buy-bm-account.org
Uzun Yılların getirmiş olduğu bu tecrübe ile %100 Güvenli , hızlı ve kaliteli hizmetimizle Türkiye’nin 8 Yıldır En güvenilir ve kaliteli
hizmetini sunmaktayız.
I’mreally enjoying the theme/design of your site.
Do you ever run into any browser compatibility issues?
A handful of my blog visitors have complained about
my blog not working correctly in Explorer but looks
great in Firefox. Do you have any ideas to help fix this issue?
Awesome! Its genuinely awesome article, I have got much
clear idea concerning from this post.
натяжные потолки в доме натяжные потолки
verified bm for sale verified bm for sale
I am sure this article has touched all the internet people,
its really really fastidious article on building up
new website.
buy facebook bm account buy verified facebook
buy verified facebook business manager verified business manager for sale
Hmm is anyone else encountering problems with the pictures on this blog loading?
I’m trying to figure out if its a problem on my
end or if it’s the blog. Any feedback would be greatly appreciated.
Профессиональный сервисный центр по ремонту техники в Самаре.
Мы предлагаем: Ремонт ноутбуков Chuwi
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
El Equilibrado de Piezas: Clave para un Funcionamiento Eficiente
¿ Has percibido alguna vez temblores inusuales en un equipo industrial? ¿O sonidos fuera de lo común? Muchas veces, el problema está en algo tan básico como una falta de simetría en un elemento móvil. Y créeme, ignorarlo puede costarte más de lo que imaginas.
El equilibrado de piezas es un paso esencial en la construcción y conservación de maquinaria agrícola, ejes, volantes y elementos de motores eléctricos. Su objetivo es claro: evitar vibraciones innecesarias que pueden causar daños serios a largo plazo .
¿Por qué es tan importante equilibrar las piezas?
Imagina que tu coche tiene una llanta mal nivelada . Al acelerar, empiezan los temblores, el manubrio se mueve y hasta puede aparecer cierta molestia al manejar . En maquinaria industrial ocurre algo similar, pero con consecuencias aún peores :
Aumento del desgaste en cojinetes y rodamientos
Sobrecalentamiento de elementos sensibles
Riesgo de averías súbitas
Paradas imprevistas que exigen arreglos costosos
En resumen: si no se corrige a tiempo, una leve irregularidad puede transformarse en un problema grave .
Métodos de equilibrado: cuál elegir
No todos los casos son iguales. Dependiendo del tipo de pieza y su uso, se aplican distintas técnicas:
Equilibrado dinámico
Recomendado para componentes que rotan rápidamente, por ejemplo rotores o ejes. Se realiza en máquinas especializadas que detectan el desequilibrio en dos o más planos . Es el método más preciso para garantizar un funcionamiento suave .
Equilibrado estático
Se usa principalmente en piezas como neumáticos, discos o volantes de inercia. Aquí solo se corrige el peso excesivo en una sola superficie . Es rápido, fácil y funcional para algunos equipos .
Corrección del desequilibrio: cómo se hace
Taladrado selectivo: se perfora la región con exceso de masa
Colocación de contrapesos: tal como en neumáticos o perfiles de poleas
Ajuste de masas: habitual en ejes de motor y partes relevantes
Equipos profesionales para detectar y corregir vibraciones
Para hacer un diagnóstico certero, necesitas herramientas precisas. Hoy en día hay opciones disponibles y altamente productivas, por ejemplo :
✅ Balanset-1A — Tu aliado portátil para equilibrar y analizar vibraciones
Equilibrado de piezas
El Balanceo de Componentes: Elemento Clave para un Desempeño Óptimo
¿Alguna vez has notado vibraciones extrañas en una máquina? ¿O tal vez ruidos que no deberían estar ahí? Muchas veces, el problema está en algo tan básico como una irregularidad en un componente giratorio . Y créeme, ignorarlo puede costarte bastante dinero .
El equilibrado de piezas es un paso esencial en la construcción y conservación de maquinaria agrícola, ejes, volantes y elementos de motores eléctricos. Su objetivo es claro: evitar vibraciones innecesarias que pueden causar daños serios a largo plazo .
¿Por qué es tan importante equilibrar las piezas?
Imagina que tu coche tiene una rueda desequilibrada . Al acelerar, empiezan los temblores, el manubrio se mueve y hasta puede aparecer cierta molestia al manejar . En maquinaria industrial ocurre algo similar, pero con consecuencias aún peores :
Aumento del desgaste en bearings y ejes giratorios
Sobrecalentamiento de elementos sensibles
Riesgo de colapsos inesperados
Paradas sin programar seguidas de gastos elevados
En resumen: si no se corrige a tiempo, un pequeño desequilibrio puede convertirse en un gran dolor de cabeza .
Métodos de equilibrado: cuál elegir
No todos los casos son iguales. Dependiendo del tipo de pieza y su uso, se aplican distintas técnicas:
Equilibrado dinámico
Recomendado para componentes que rotan rápidamente, por ejemplo rotores o ejes. Se realiza en máquinas especializadas que detectan el desequilibrio en dos o más planos . Es el método más preciso para garantizar un funcionamiento suave .
Equilibrado estático
Se usa principalmente en piezas como ruedas, discos o volantes . Aquí solo se corrige el peso excesivo en una sola superficie . Es ágil, práctico y efectivo para determinados sistemas.
Corrección del desequilibrio: cómo se hace
Taladrado selectivo: se perfora la región con exceso de masa
Colocación de contrapesos: por ejemplo, en llantas o aros de volantes
Ajuste de masas: habitual en ejes de motor y partes relevantes
Equipos profesionales para detectar y corregir vibraciones
Para hacer un diagnóstico certero, necesitas herramientas precisas. Hoy en día hay opciones disponibles y altamente productivas, por ejemplo :
✅ Balanset-1A — Tu compañero compacto para medir y ajustar vibraciones
Excellent, what a webpage it is! This webpage gives valuable facts to us, keep it up.
obviously like your web-site but you have to test the spelling on quite a few of your posts.
Many of them are rife with spelling issues and I find it very bothersome
to inform the truth on the other hand I’ll definitely come back again.
I’ve learn several good stuff here. Certainly value bookmarking for revisiting.
I surprise how so much effort you place to create any such great informative web site.
Wow, marvelous blog format! How lengthy have you ever been running a blog for?
you made blogging look easy. The whole glance of your website is fantastic, as smartly as the content!
окна rehau окна rehau .
I was curious if you ever thought of changing the page layout of your blog?
Its very well written; I love what youve got to say. But maybe you could
a little more in the way of content so people could connect with it better.
Youve got an awful lot of text for only having 1 or
2 pictures. Maybe you could space it out better?
Greetings! I know this is kinda off topic however I’d figured I’d ask.
Would you be interested in exchanging links or maybe guest authoring a blog post or vice-versa?
My blog addresses a lot of the same subjects as yours and I feel we
could greatly benefit from each other. If you
are interested feel free to send me an email. I look forward to hearing from you!
Excellent blog by the way!
Hi there to all, how is all, I think every one is getting more from this website,
and your views are nice in support of new people.
на этом сайте kra31.at
аренда авто посуточно прокат автомобилей цены
What an informative article! This is very informative аnd easy to follow!
Kuos tօo you for the effort you’vе puut іnto explaining everyting ⅽlearly.
Foor beginners ᧐r advnced usrs alike tһe detailed instructions аbout LIⲚE網頁版 LӀNE電腦版 and LINE下載安卓 aге гight
on point. Ι found thhe tips օn LINE安卓版 and LIΝЕ手機版 esρecially useful.
The ⅼinks tto LINE網頁版下載 ᏞINE電腦版下載 ɑnd ᒪINE安卓版下載 ԝere super convenient.
Allso youг mention of tһe LINE官網 and ᏞINE官網下載 sһows real care for user trust аnd safety.
Pleaѕe continue sharing such useful posts!
Cⅼick here tߋ Download : line官網
Hi there! Do you know if they make any plugins to help with Search
Engine Optimization? I’m trying to get my blog to rank for some targeted keywords but I’m not seeing very good gains.
If you know of any please share. Kudos!
Приобрести диплом о высшем образовании!
Приобретение диплома ВУЗа через проверенную и надежную компанию дарит массу достоинств для покупателя. Заказать диплом об образовании у проверенной фирмы: doks-v-gorode-novokuznetsk-42.online
перенаправляется сюда кракен сайт
Everything is very open with a very clear description of the issues.
It was really informative. Your website is useful.
Many thanks for sharing!
It is appropriate time to make some plans for the longer term and
it is time to be happy. I’ve read this post and if I may I wish to recommend you some interesting things or tips.
Maybe you can write subsequent articles relating to this article.
I want to learn more things about it!
сайт кракен вход
I go to see day-to-day some web pages and blogs to
read content, but this webpage gives feature based articles.
Having read this I believed it was extremely informative.
I appreciate you spending some time and energy to put this information together.
I once again find myself personally spending a significant amount of
time both reading and leaving comments. But so what, it was
still worthwhile!
Игровой портал Vavada-pl.com.pl — ваш выбор|Испытайте удачу на Vavada-pl.com.pl|Vavada-pl.com.pl — ваше казино онлайн|Регистрируйтесь и выигрывайте на Vavada-pl.com.pl|Vavada-pl.com.pl — играйте и выигрывайте|Специальные бонусы на Vavada-pl.com.pl|Выигрыши и успехи на Vavada-pl.com.pl|Новинки игр на Vavada-pl.com.pl|Vavada-pl.com.pl — азарт и развлечения|Лучшие ставки на Vavada-pl.com.pl
!vavada https://vavada-pl.com.pl/ .
подробнее здесь кракен вход
buy verified facebook business manager account business-manager-for-sale.org
buy facebook verified business manager buy-business-manager-verified.org
Перейти на сайт кракен вход
fb bussiness manager https://buy-bm.org/
Hello are using WordPress for your site platform?
I’m new to the blog world but I’m trying to get started and
set up my own. Do you need any html coding expertise to make your
own blog? Any help would be really appreciated!
Hi my loved one! I wish to say that this article is
awesome, great written and come with almost all vital infos.
I would like to peer more posts like this .
Heya i am for the first time here. I came across this board and I find
It truly useful & it helped me out a lot. I hope to give something back and aid others like you helped me.
kra32 cc
Anahtar kelimem.
Hi there to every one, for the reason that I am actually keen of reading this weblog’s post to be updated regularly.
It carries good information.
onlygramtr giris
Hi there to all, how is everything, I think every one is getting
more from this website, and your views are good in support of
new visitors.
This is a topic which is close to my heart… Many thanks! Exactly where are your contact details
though?
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: ремонт айфона с выездом мастера в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Reliable stuff, Kudos. https://www.google.ps/url?q=https://betflix285.games/betflix285-%e0%b8%aa%e0%b8%a5%e0%b9%87%e0%b8%ad%e0%b8%95%e0%b8%97%e0%b8%b3%e0%b9%80%e0%b8%87%e0%b8%b4%e0%b8%99/
Comercializamos dispositivos de equilibrado!
Producimos nosotros mismos, construyendo en tres países a la vez: Portugal, Argentina y España.
✨Ofrecemos equipos altamente calificados y como no somos vendedores sino fabricantes, nuestro precio es inferior al de nuestros competidores.
Hacemos entregas internacionales a cualquier país, consulte los detalles técnicos en nuestra página oficial.
El equipo de equilibrio es transportable, ligero, lo que le permite ajustar cualquier elemento giratorio en cualquier condición.
Мы изготавливаем дипломы психологов, юристов, экономистов и прочих профессий по разумным тарифам.– raidan.in/как-быстро-купить-диплом-и-не-попастьс
Heya i’m for the first time here. I found this board
and I in finding It truly useful & it helped me out a lot.
I am hoping to give one thing again and aid
others like you helped me.
самые точные прогнозы на хоккей самые точные прогнозы на хоккей .
Everyone loves what you guys are usually up too. This
type of clever work and reporting! Keep up the awesome works guys I’ve incorporated you guys to blogroll.
buy facebook business managers https://verified-business-manager-for-sale.org
What’s up to all, the contents present at this website are really remarkable for people knowledge, well,
keep up the nice work fellows.
прогнозы на хоккей лайв http://www.luchshie-prognozy-na-khokkej12.ru .
окна пвх окна пвх .
El dispositivo para equilibrio Balanset-1A es el resultado de años de trabajo duro y dedicación.
Siendo productores de esta herramienta puntera, estamos orgullosos de cada aparato que se envía de nuestras instalaciones.
No se trata únicamente de un bien, sino además una herramienta que hemos perfeccionado para resolver problemas críticos relacionados con desbalances en máquinas dinámicas.
Sabemos lo frustrante que puede ser enfrentar interrupciones repentinas o mantenimientos caros.
Por ello diseñamos Balanset-1A enfocándonos en las demandas específicas de los profesionales del sector. ❤️
Enviamos Balanset 1A con origen directo desde nuestras sedes en Portugal , España y Argentina , garantizando despachos ágiles y confiables a cualquier parte del mundo.
Nuestros representantes locales están siempre disponibles para ofrecer asistencia técnica individualizada y orientación en el lenguaje que prefieras.
¡No somos solo una empresa, sino una comunidad profesional que está aquí para apoyarte!
Your blog stands out in a sea of generic and formulaic content Your unique voice and perspective are what keep me coming back for more
facebook bm buy https://buy-business-manager-accounts.org
buy tiktok ads accounts https://buy-tiktok-ads-account.org
tiktok ad accounts https://tiktok-ads-account-buy.org
Many thanks. An abundance of info.
кракен сайт маркетплейс
Ψάχνετε το αξιόπιστο ιστοσελίδα Nomini στην Ελλάδα σήμερα.
новая ссылка кракен
This site was… how do I say it? Relevant!! Finally I have found something that helped me.
Appreciate it!
اکسس کنترل
Mantap thread-nya bro! Saya juga lagi main di situs slot online yang sering kasih cuan namanya JEPANGBET.
Slotnya gacor, withdraw juga cepet banget.
Cek aja langsung di sini: [url=https://jepangbet.com]JEPANGBET – Situs Slot Gacor No.1[/url]
экскурсии по калининграду и калининградской области ночная экскурсия по калининграду
No matter if some one searches for his necessary thing, so he/she
wants to be available that in detail, thus that thing
is maintained over here.
Good day! I know this is kinda off topic but I’d figured
I’d ask. Would you be interested in trading links or maybe guest writing a blog
post or vice-versa? My website addresses a lot of the same
subjects as yours and I think we could greatly benefit from each other.
If you are interested feel free to shoot me an email.
I look forward to hearing from you! Excellent blog by the way!
Currently it sounds like Drupal is the top blogging platform available right now.
(from what I’ve read) Is that what you’re using on your blog?
WOW just what I was looking for. Came here by searching for cannabis
Excellent goods from you, man. I’ve understand
your stuff previous to and you are just too magnificent.
I really like what you’ve acquired here, really like what
you’re saying and the way in which you say it. You make it entertaining and you still
care for to keep it smart. I can’t wait to read far more from
you. This is really a tremendous site.
Do you mind if I quote a few of your posts as long as I provide credit and sources back to your webpage?
My blog site is in the exact same area of interest as yours and my visitors would really benefit from
a lot of the information you present here. Please let me know if this ok with you.
Appreciate it!
Thank you for your sharing. I am worried that I lack creative ideas. It is your article that makes me full of hope. Thank you. But, I have a question, can you help me?
I savor, result in I discovered just what I used
to be taking a look for. You have ended my four day long hunt!
God Bless you man. Have a nice day. Bye
Avtomobilini duzgun yerd? park etm?y?n m?shur aktyor bel? C?ZALANDIRILDI
https://x.com/kiselev_igr/status/1925174314870976772
It’s genuinely very complex in this active life to listen news on Television, therefore I just
use the web for that reason, and take the latest news.
Wow, wonderful blog layout! How long have you been blogging
for? you make blogging look easy. The overall look of your web site is excellent,
let alone the content!
buy tiktok ads https://tiktok-ads-account-for-sale.org
buy tiktok ads accounts https://tiktok-agency-account-for-sale.org
thanks for.
Click to be surprised.
tiktok ads agency account https://buy-tiktok-ad-account.org
Excellent site you have here.. It’s hard to find high-quality writing like yours these days.
I honestly appreciate individuals like you! Take
care!!
Asking questions are actually nice thing if you are not understanding anything fully,
but this paragraph offers pleasant understanding yet.
I love your blog.. very nice colors & theme. Did you make this website yourself or did you hire someone to
do it for you? Plz answer back as I’m looking to create my own blog and
would like to know where u got this from. appreciate
it
Equilibrado dinámico portátil:
Soluciones rápidas sin desmontar máquinas
Imagina esto: tu rotor comienza a vibrar, y cada minuto de inactividad genera pérdidas. ¿Desmontar la máquina y esperar días por un taller? Olvídalo. Con un equipo de equilibrado portátil, corriges directamente en el lugar en horas, sin mover la maquinaria.
¿Por qué un equilibrador móvil es como un “kit de supervivencia” para máquinas rotativas?
Pequeño, versátil y eficaz, este dispositivo es una pieza clave en el arsenal del ingeniero. Con un poco de práctica, puedes:
✅ Prevenir averías mayores al detectar desbalances.
✅ Reducir interrupciones no planificadas.
✅ Trabajar en lugares remotos, desde plataformas petroleras hasta plantas eólicas.
¿Cuándo es ideal el equilibrado rápido?
Siempre que puedas:
– Tener acceso físico al elemento rotativo.
– Colocar sensores sin interferencias.
– Realizar ajustes de balance mediante cambios de carga.
Casos típicos donde conviene usarlo:
La máquina rueda más de lo normal o emite sonidos extraños.
No hay tiempo para desmontajes (proceso vital).
El equipo es de alto valor o esencial en la línea de producción.
Trabajas en zonas remotas sin infraestructura técnica.
Ventajas clave vs. llamar a un técnico
| Equipo portátil | Servicio externo |
|—————-|——————|
| ✔ Rápida intervención (sin demoras) | ❌ Demoras por agenda y logística |
| ✔ Monitoreo preventivo (evitas fallas mayores) | ❌ Suele usarse solo cuando hay emergencias |
| ✔ Ahorro a largo plazo (menos desgaste y reparaciones) | ❌ Gastos periódicos por externalización |
¿Qué máquinas se pueden equilibrar?
Cualquier sistema rotativo, como:
– Turbinas de vapor/gas
– Motores industriales
– Ventiladores de alta potencia
– Molinos y trituradoras
– Hélices navales
– Bombas centrífugas
Requisito clave: espacio para instalar sensores y realizar ajustes.
Tecnología que simplifica el proceso
Los equipos modernos incluyen:
Apps intuitivas (guían paso a paso, sin cálculos manuales).
Diagnóstico instantáneo (visualización precisa de datos).
Durabilidad energética (útiles en ambientes hostiles).
Ejemplo práctico:
Un molino en una mina empezó a generar riesgos estructurales. Con un equipo portátil, el técnico identificó el problema en menos de media hora. Lo corrigió añadiendo contrapesos y impidió una interrupción prolongada.
¿Por qué esta versión es más efectiva?
– Estructura más dinámica: Formato claro ayuda a captar ideas clave.
– Enfoque práctico: Ofrece aplicaciones tangibles del método.
– Lenguaje persuasivo: Frases como “herramienta estratégica” o “evitas fallas mayores” refuerzan el valor del servicio.
– Detalles técnicos útiles: Se especifican requisitos y tecnologías modernas.
¿Necesitas ajustar el tono (más comercial) o añadir keywords específicas? ¡Aquí estoy para ayudarte! ️
Great article! We will be linking to this great content on our website.
Keep up the great writing.
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт холодильников gorenje цены, можете посмотреть на сайте: ремонт холодильников gorenje адреса
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
When I initially commented I clicked the “Notify me when new comments are added” checkbox and now each
time a comment is added I get four e-mails with the same comment.
Is there any way you can remove people from that service?
Appreciate it!
buy tiktok ad account https://buy-tiktok-ads-accounts.org
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт холодильников gorenje в москве, можете посмотреть на сайте: ремонт холодильников gorenje
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт холодильников gorenje цены, можете посмотреть на сайте: ремонт холодильников gorenje рядом
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт холодильников gorenje, можете посмотреть на сайте: ремонт холодильников gorenje
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт холодильников gorenje, можете посмотреть на сайте: ремонт холодильников gorenje
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
I vіsited sveral websites however the audio quality foг audio songs curгent at this weЬ pɑge is actually fabulous.
Visot : mrfooll
There is no shortage of types of cigarette barbecue smokers readily available to grilling lovers.
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт холодильников gorenje цены, можете посмотреть на сайте: ремонт холодильников gorenje
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт холодильников gorenje адреса, можете посмотреть на сайте: срочный ремонт холодильников gorenje
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
hello!,I love your writing very so much! percentage we keep up a
correspondence extra about your post on AOL? I require an expert on this area to solve
my problem. May be that’s you! Taking a look forward to look you.
Wonderful, what a website it is! This website gives useful data to us, keep
it up.
Have a look at my page – click here
Great delivery. Outstanding arguments. Keep up the good work.
e?aeai naeo iaaacei
Hey there I am so thrilled I found your website, I really found
you by mistake, while I was looking on Google for something else, Anyways I am here now and would just like to say thanks for a fantastic post and a all round thrilling
blog (I also love the theme/design), I don’t have time to look over it all at the moment but I have bookmarked it
and also added your RSS feeds, so when I have time I
will be back to read much more, Please do keep
up the great jo.
kra33at
Wonderful post! We will be linking to this particularly great article on our site. Keep up the good writing.
Thanks for another fantastic article. Where else may anyone get that type of info in such an ideal approach of writing?
I have a presentation subsequent week, and I’m at the search
for such information.
linkler icin tesekkur
I was wondering if you ever considered changing the structure of your blog?
Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content so
people could connect with it better. Youve got an awful lot of text for only having one
or 2 images. Maybe you could space it out better?
buy tiktok ads https://tiktok-ads-agency-account.org
ии для написания резюме
Very nice post. I just stumbled upon your weblog and wished to say that I’ve
really enjoyed surfing around your blog posts. In any case I will be subscribing to your feed and I hope you
write again very soon!
I do not even know the way I finished up right here,
but I assumed this post was once great. I
doo not understand who you’re but certainly you are going to a
famous blogger for those who aren’t already. Cheers!
Greetings from Los angeles! I’m bored to tears at work so I
decided to browse your blog on my iphone during lunch break.
I enjoy the info you present here and can’t wait to take a look when I get
home. I’m surprised at how quick your blog loaded
on my phone .. I’m not even using WIFI,
just 3G .. Anyhow, superb blog!
Everything is very open with a really clear description of the challenges.
It was definitely informative. Your site is very useful.
Thanks for sharing!
La Nivelación de Partes Móviles: Esencial para una Operación Sin Vibraciones
¿Alguna vez has notado vibraciones extrañas en una máquina? ¿O tal vez ruidos que no deberían estar ahí? Muchas veces, el problema está en algo tan básico como un desequilibrio en alguna pieza rotativa . Y créeme, ignorarlo puede costarte bastante dinero .
El equilibrado de piezas es un paso esencial en la construcción y conservación de maquinaria agrícola, ejes, volantes y elementos de motores eléctricos. Su objetivo es claro: prevenir movimientos indeseados capaces de generar averías importantes con el tiempo .
¿Por qué es tan importante equilibrar las piezas?
Imagina que tu coche tiene una llanta mal nivelada . Al acelerar, empiezan las sacudidas, el timón vibra y resulta incómodo circular así. En maquinaria industrial ocurre algo similar, pero con consecuencias aún peores :
Aumento del desgaste en soportes y baleros
Sobrecalentamiento de partes críticas
Riesgo de fallos mecánicos repentinos
Paradas no planificadas y costosas reparaciones
En resumen: si no se corrige a tiempo, un pequeño desequilibrio puede convertirse en un gran dolor de cabeza .
Métodos de equilibrado: cuál elegir
No todos los casos son iguales. Dependiendo del tipo de pieza y su uso, se aplican distintas técnicas:
Equilibrado dinámico
Perfecto para elementos que operan a velocidades altas, tales como ejes o rotores . Se realiza en máquinas especializadas que detectan el desequilibrio en múltiples superficies . Es el método más fiable para lograr un desempeño estable.
Equilibrado estático
Se usa principalmente en piezas como llantas, platos o poleas . Aquí solo se corrige el peso excesivo en un plano . Es rápido, sencillo y eficaz para ciertos tipos de maquinaria .
Corrección del desequilibrio: cómo se hace
Taladrado selectivo: se quita peso en el punto sobrecargado
Colocación de contrapesos: como en ruedas o anillos de volantes
Ajuste de masas: habitual en ejes de motor y partes relevantes
Equipos profesionales para detectar y corregir vibraciones
Para hacer un diagnóstico certero, necesitas herramientas precisas. Hoy en día hay opciones económicas pero potentes, tales como:
✅ Balanset-1A — Tu compañero compacto para medir y ajustar vibraciones
парящий натяжной потолок парящий натяжной потолок .
10 древних книг, чьи шифры сводят с ума учёных и охотников за тайнами
https://x.com/kiselev_igr/status/1925810143729451043
создание сайтов минск создание и разработка сайтов минск
шильдик из латуни для гравировки шильдики изготовление
бейдж из латуни сделать бейдж на заказ
I just like the valuable info you supply for your articles.
I’ll bookmark your weblog and check once more right here
frequently. I’m rather certain I’ll be told plenty of new stuff right right here!
Best of luck for the next!
You actually make it appear so easy along with your presentation however I find this topic to be really one thing that I feel I would never
understand. It kind of feels too complicated and extremely large for me.
I am taking a look ahead on your subsequent publish, I’ll
attempt to get the dangle of it!
Article writing is also a fun, if you know after that you can write otherwise it is difficult to write.
Great blog here! Also your site loads up fast! What host are you using?
Can I get your affiliate link to your host? I wish my site loaded up as fast as yours lol
Very informative.
Solución rápida de equilibrio:
Soluciones rápidas sin desmontar máquinas
Imagina esto: tu rotor comienza a vibrar, y cada minuto de inactividad cuesta dinero. ¿Desmontar la máquina y esperar días por un taller? Olvídalo. Con un equipo de equilibrado portátil, resuelves sobre el terreno en horas, preservando su ubicación.
¿Por qué un equilibrador móvil es como un “kit de supervivencia” para máquinas rotativas?
Fácil de transportar y altamente funcional, este dispositivo es la herramienta que todo técnico debería tener a mano. Con un poco de práctica, puedes:
✅ Corregir vibraciones antes de que dañen otros componentes.
✅ Reducir interrupciones no planificadas.
✅ Actuar incluso en sitios de difícil acceso.
¿Cuándo es ideal el equilibrado rápido?
Siempre que puedas:
– Tener acceso físico al elemento rotativo.
– Ubicar dispositivos de medición sin inconvenientes.
– Ajustar el peso (añadiendo o removiendo masa).
Casos típicos donde conviene usarlo:
La máquina presenta anomalías auditivas o cinéticas.
No hay tiempo para desmontajes (proceso vital).
El equipo es costoso o difícil de detener.
Trabajas en áreas donde no hay asistencia mecánica disponible.
Ventajas clave vs. llamar a un técnico
| Equipo portátil | Servicio externo |
|—————-|——————|
| ✔ Rápida intervención (sin demoras) | ❌ Demoras por agenda y logística |
| ✔ Mantenimiento proactivo (previenes daños serios) | ❌ Solo se recurre ante fallos graves |
| ✔ Reducción de costos operativos con uso continuo | ❌ Costos recurrentes por servicios |
¿Qué máquinas se pueden equilibrar?
Cualquier sistema rotativo, como:
– Turbinas de vapor/gas
– Motores industriales
– Ventiladores de alta potencia
– Molinos y trituradoras
– Hélices navales
– Bombas centrífugas
Requisito clave: acceso suficiente para medir y corregir el balance.
Tecnología que simplifica el proceso
Los equipos modernos incluyen:
Aplicaciones didácticas (para usuarios nuevos o técnicos en formación).
Evaluación continua (informes gráficos comprensibles).
Autonomía prolongada (ideales para trabajo en campo).
Ejemplo práctico:
Un molino en una mina mostró movimientos inusuales. Con un equipo portátil, el técnico identificó el problema en menos de media hora. Lo corrigió añadiendo contrapesos y ahorró jornadas de inactividad.
¿Por qué esta versión es más efectiva?
– Estructura más dinámica: Organización visual facilita la comprensión.
– Enfoque práctico: Incluye casos ilustrativos y contrastes útiles.
– Lenguaje persuasivo: Frases como “herramienta estratégica” o “minimizas riesgos importantes” refuerzan el valor del servicio.
– Detalles técnicos útiles: Se especifican requisitos y tecnologías modernas.
¿Necesitas ajustar el tono (más instructivo) o añadir keywords específicas? ¡Aquí estoy para ayudarte! ️
tiktok ads account for sale https://buy-tiktok-business-account.org
buy tiktok ads account buy tiktok ads accounts
This is very interesting, You’re a very skilled blogger.
I’ve joined your feed and look forward to
seeking more of your magnificent post. Also, I have
shared your website in my social networks!
I got this site from my pal who shared with me on the topic
of this website and at the moment this time I am visiting this web
site and reading very informative articles at this place.
10 фактов о фильме “Кинг-Конг”
https://x.com/kiselev_igr/status/1925908871370911795
I’m really impressed with your writing skills and also with the layout on your blog.
Is this a paid theme or did you modify it yourself?
Either way keep up the nice quality writing, it is rare to see a nice
blog like this one today.
Hi to all, for the reason that I am really keen of reading
this website’s post to be updated daily. It contains
fastidious data.
Great info. Lucky me I discovered your site by chance
(stumbleupon). I’ve book marked it for later!
When Mummius looted Corinth, he confided some well-known old art works to a ship captain for transport and stated, “Remember, in case you harm these, you will have to offer replacements similar to them.” 18 September 2015 (Discussion on preventing PISSI) Russia has asked to debate combating PISSI with the US. Since orphan works will not be the only ones for which copyright is simply too restrictive, I also suggested that the best thing to do is to legalize noncommercial redistribution of all revealed works. 18 September 2015 (Anti-privacy US officials) Anti-privateness US officials are praying for a terrorist attack, or something they’ll spin as one, to get an opportunity to attack our freedom some extra. 17 September 2015 (UK anti-union invoice) The UK anti-union bill, that would make strikes practically unimaginable, is a militant attack on workers. It’s common to many fields of production that designers make their products as addictive as doable. The Tories don’t admit they intend make poor people homeless; they do it with a bunch of cuts and pressures.
I simply couldn’t go away your site before suggesting that I
extremely enjoyed the usual information a person provide on your visitors?
Is going to be back frequently in order to
check out new posts
¡Saludos, jugadores !
Casino online chile dinero real es ideal para quienes buscan emociГіn con la posibilidad de obtener ganancias.
Juegos de casino dinero real para ganar premios en lГnea – https://www.youtube.com/watch?v=CRuk1wy6nA0&list=PLX0Xt4gdc3aJG7y03Wh5Qf0JrapCEgMFH
Online casino es una industria en auge en AmГ©rica Latina, especialmente en Chile. Gracias a la tecnologГa, ahora puedes jugar desde casa. Y lo mejor: hay opciones para todos los presupuestos.
¡Que disfrutes de beneficios inesperados !
Pretty nice post. I just stumbled upon your weblog and wished to say that I
have truly enjoyed surfing around your blog posts. In any case I’ll be subscribing to your rss feed and I hope you write again very soon!
Thanks , I’ve recently been looking for info about this subject
for a while and yours is the greatest I have discovered so far.
However, what in regards to the conclusion? Are you sure
in regards to the source?
ウィキソースに日本国との平和条約の説明書の原文があります。草薙一義 “ユーザー訪問 日本最大の靴小売専門店小規模多店舗展開のシステム化を実現/チヨダ靴店”.野口達也 “日本のトイザらス目指した「チヨダ」の挫折”.“原宿に靴ブランド「セダークレスト」の旗艦店-新生1号店”.“企業 チヨダ靴店”. “チヨダ 出店柳制と新業態への転換を軸に思い切ったリストラに取り組む”.過去独立して存在していたジャスダックも株式会社形態であった。 “株式会社チヨダ「TOKYO SHOES RETAILING CENTER 西友成増店」が9月19日(木)にオープン!後日、「はなカフェ」で渉と再会し彼から誘われて上野動物園に人生初のデートに行くことになるが、渉の右の鼻の穴から伸びていた鼻毛が気になり、デートに集中できず、理想の恋と違っていたため幻滅してしまう。
стоимость м2 натяжного потолка https://potolkilipetsk.ru .
This is a great tip especially to those new to the blogosphere.
Brief but very accurate information… Many thanks for sharing this one.
A must read article!
Watch In the Land of Women (2007) it Here!
шильдик на заказ изготовление шильдиков на заказ в москве
агентства по продвижению seo для нового сайта
шильдики москва заказать шильды корпоративные
I’d like to find out more? I’d love to find out some additional
information.
Hmm it seems like your blog ate my first comment (it was extremely long)
so I guess I’ll just sum it up what I had
written and say, I’m thoroughly enjoying your blog.
I too am an aspiring blog blogger but I’m still new
to the whole thing. Do you have any suggestions for rookie blog writers?
I’d genuinely appreciate it.
I have read so many articles about the blogger lovers however this post
is actually a nice post, keep it up.
Discover thousands of the latest and popular films from various genres.
Enjoy high-quality movie streaming experience without any
subscription needed.
I visited many blogs however the audio feature for
audio songs existing at this site is in fact fabulous.
mods-menu — это замечательный способ улучшить игровой процесс.
Особенно если вы пользуетесь устройствами
на платформе Android, модификации открывают перед вами
широкие горизонты. Я нравится использовать игры с обходом системы защиты,
чтобы развиваться быстрее.
Моды для игр дают невероятную возможность
настроить игру, что погружение
в игру гораздо интереснее. Играя с твиками, я могу персонализировать свой опыт, что
добавляет приключенческий процесс и делает игру более
захватывающей.
Это действительно невероятно, как такие моды могут улучшить игровой процесс, а при этом не нарушая
использовать такие модифицированные приложения можно
без особых неприятных последствий,
если быть внимательным и следить за обновлениями.
Это делает каждый игровой процесс лучше контролируемым, а возможности практически выше
всяких похвал.
Рекомендую попробовать такие модифицированные версии для Android — это может придаст новый смысл
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт холодильников gorenje рядом, можете посмотреть на сайте: ремонт холодильников gorenje цены
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
I know this web site offers quality depending posts and additional material,
is there any other web site which gives these kinds of data in quality?
Its not my first time to pay a visit this website,
i am visiting this website dailly and obtain pleasant data from here all the time.
Useful write ups, Appreciate it! https://www.hulkshare.com/tomatopain58/
Deneme Bonusu Veren Siteler – 2025 En İyiler
Wah, infonya menarik gan! Saya juga lagi main di situs slot
online yang banyak bonusnya namanya JEPANGBET.
Slotnya gacor, withdraw juga cepet banget.
Cek aja langsung di sini: [url=https://jepangbet.com]JEPANGBET – Situs Slot Gacor
No.1[/url]
Hi! Someone in my Facebook group shared this site with us so I came to check it
out. I’m definitely loving the information. I’m book-marking and will be tweeting this to my followers!
Terrific blog and outstanding design and style.
whoah this blog is fantastic i like studying your posts.
Stay up the good work! You realize, a lot of persons are searching
around for this information, you can aid them greatly.
Hey! I’m at work browsing your blog from my new iphone 4! Just wanted to say I love reading your blog and look forward to all your posts! Carry on the fantastic work!
Good article! We are linking to this great article on our website.
Keep up the good writing.
LIGACOR ♦️♦️ LINK LOGIN ALTERNATIF SITUS SLOT AUTO MAXWIN DIJAMIN TERPERCAYA SAAT INI YANG MENAWARKAN PLATFORM PERMAINAN
YANG AMAN, TERPERCAYA, DAN INOVATIF, SERTA BONUS MENARIK DAN LAYANAN PELANGGAN
24/7. 2024
When I originally commented I clicked the “Notify me when new comments are added” checkbox and now each time a comment is added I
get three emails with the same comment. Is there any way you can remove me from that service?
Appreciate it!
I’m so glad I came upon this blog! Your style is absolutely
fantastic, and I’ve already learned so much about style.
The looks you feature are so inspiring. I’m excited to explore more!
Look into my webpage; Air Jordan Poco Prezzo
It’s enormous that you are getting ideas from this article as well as from our discussion made
at this place.
Hi there, I read your new stuff daily. Your story-telling style is awesome, keep doing what you’re doing!
заказать бейджик https://badge-moscow-na-zakaz.ru
Truly no matter if someone doesn’t know afterward its up to other viewers that they will assist, so here it occurs.
значки из металла на заказ изготовление эмблем из металла
Pretty section of content. I just stumbled upon your web site and in accession capital to
assert that I get in fact enjoyed account your
blog posts. Anyway I’ll be subscribing to
your feeds and even I achievement you access consistently fast.
металлические значки москва изготовление значков из металла
I don’t even know how I ended up here, but I thought
this post was good. I don’t know who you are but definitely you are going
to a famous blogger if you aren’t already 😉 Cheers!
Hello to all, the contents existing at this web site are really awesome for people experience, well, keep up the nice work fellows.
melbet bonus
I blog often and I really thank you for your information. This article has truly peaked my interest. I’m going to take a note of your blog and keep checking for new information about once per week. I subscribed to your Feed too.
It’s going to be ending of mine day, except before end I am
reading this great post to increase my knowledge.
Hi there, every time i used to check website posts here in the early
hours in the break of day, for the reason that i like to learn more and more.
Heya i am for the first time here. I came across
this board and I find It really useful & it
helped me out much. I hope to give something back and aid others
like you aided me.
Why viewers still make use of to read news papers when in this technological globe everything is accessible on web?
abu dhabi hafilat card balance check
bokep tiktok
I love your blog.. very nice colors & theme.
Did you make this website yourself or did you hire
someone to do it for you? Plz answer back as I’m looking
to design my own blog and would like to find out where u got this from.
many thanks
Everyone loves it when individuals get together and share thoughts.
Great blog, continue the good work!
Thank you for the amazing blog post!
bokep gorontalo
Hey! This post could not be written any better! Reading this post reminds me of
my good old room mate! He always kept talking about this.
I will forward this page to him. Pretty sure he will have
a good read. Thanks for sharing!
AquaSculpt is a cutting-edge weight management formula designed to help you achieve a leaner, more sculpted physique naturally.
Just wish to say your article is as astounding. The clarity in your post is
simply excellent and i can assume you’re an expert on this subject.
Well with your permission let me to grab your RSS feed to keep
updated with forthcoming post. Thanks a million and please continue the rewarding work.
Generally I don’t read post on blogs, however I wish to say that this write-up very
compelled me to try and do it! Your writing style has been amazed
me. Thanks, very great article.
hello admin good job admin bla bla.. d3n3m3 b0n0s0 v4r4n s1t3l3r
заказать поисковую оптимизацию seo продвижение и контекстная реклама
металлические значки металлические значки на заказ москва
I think this is among the most significant info for me.
And i’m glad reading your article. But wanna remark on some general things, The web site style is great, the articles is really nice : D.
Good job, cheers
Do you mind if I quote a few of your articles as
long as I provide credit and sources back to your weblog?
My website is in the exact same niche as yours and my
visitors would genuinely benefit from a lot of the information you present here.
Please let me know if this alright with you. Thanks!
Remarkable! Its truly remarkable article, I have got much clear idea regarding
from this piece of writing.
No matter if some one searches for his vital thing, thus
he/she desires to be available that in detail, thus that thing is maintained over here.
AquaSculpt is an innovative supplement designed to support weight management by naturally boosting metabolism, curbing cravings, and increasing energy levels.
ocenili váš obsah. Dejte mi prosím vědět.
This is my first time pay a visit at here and i am in fact happy to read all at one place.
We are a group of volunteers and opening a new scheme in our community.
Your web site provided us with valuable info to work on. You’ve done a formidable job and our whole community will be thankful
to you.
Howdy vеry nice site!! Guy .. Beautiful .. Superb ..
Ӏ’ll bookmark үour blog аnd take the feeds also?
I’m haрpy to seek out numerous helpful info һere in the post, we neeԀ work out extra techniques օn tһіs regard, thɑnk
you for sharing. . . . . .
Feel free to surf tо mү һomepage: Sports Betting
Today, I went to the beachfront with my children. I found a
sea shell and gave it to my 4 year old daughter and said “You can hear the ocean if you put this to your ear.” She placed the shell to her
ear and screamed. There was a hermit crab inside and it pinched her ear.
She never wants to go back! LoL I know this is totally off topic but I had to tell someone!
I like the valuable information you provide in your
articles. I will bookmark your weblog and check again here
frequently. I’m quite certain I’ll learn plenty of
new stuff right here! Good luck for the next!
Excellent post. Keep posting such kind of info on your blog.
Im really impressed by your site.
Hey there, You’ve done an excellent job. I will certainly digg it and personally suggest to my friends.
I’m sure they will be benefited from this site.
Greetings! Very useful advice in this particular post!
It is the little changes which will make the biggest changes.
Many thanks for sharing!
типография организация типография производство
цифровая типография сайт типографии спб
типография печать типография печать
Hi there, just became aware of your blog through Google, and
found that it’s really informative. I’m going to watch out for brussels.
I’ll appreciate if you continue this in future.
Lots of people will be benefited from your writing. Cheers!
Your style is really unique in comparison to other people I have read stuff from.
Thank you for posting when you’ve got the opportunity, Guess I’ll just book mark this page.
I think the admin of this web site is really working hard in support of his web page,
since here every information is quality based stuff.
u2r6E2Dtmj1
кайт египет
Watch Within the Land of Women (2007) it Here!
Hey There. I discovered your blog using msn. That is a really neatly written article.
I will be sure to bookmark it and come back
to learn extra of your useful info. Thank you for the post.
I will certainly return.
Somebody necessarily lend a hand to make severely posts I’d state.
This is the first time I frequented your web page and thus far?
I surprised with the analysis you made to make this particular publish amazing.
Excellent task!
Họ còn cài cắm liên kết ẩn trong website nhằm đánh lừa
công cụ tìm kiếm phishing attack google
Hi there, i read your blog from time to time and i own a similar one and i was just wondering if you get a lot of
spam comments? If so how do you protect against it, any plugin or anything you can suggest?
I get so much lately it’s driving me mad so any assistance is very much appreciated.
Solución rápida de equilibrio:
Reparación ágil sin desensamblar
Imagina esto: tu rotor empieza a temblar, y cada minuto de inactividad afecta la productividad. ¿Desmontar la máquina y esperar días por un taller? Ni pensarlo. Con un equipo de equilibrado portátil, solucionas el problema in situ en horas, sin alterar su posición.
¿Por qué un equilibrador móvil es como un “paquete esencial” para máquinas rotativas?
Compacto, adaptable y potente, este dispositivo es una pieza clave en el arsenal del ingeniero. Con un poco de práctica, puedes:
✅ Corregir vibraciones antes de que dañen otros componentes.
✅ Evitar paradas prolongadas, manteniendo la producción activa.
✅ Actuar incluso en sitios de difícil acceso.
¿Cuándo es ideal el equilibrado rápido?
Siempre que puedas:
– Tener acceso físico al elemento rotativo.
– Instalar medidores sin obstáculos.
– Modificar la distribución de masa (agregar o quitar contrapesos).
Casos típicos donde conviene usarlo:
La máquina rueda más de lo normal o emite sonidos extraños.
No hay tiempo para desmontajes (proceso vital).
El equipo es difícil de parar o caro de inmovilizar.
Trabajas en campo abierto o lugares sin talleres cercanos.
Ventajas clave vs. llamar a un técnico
| Equipo portátil | Servicio externo |
|—————-|——————|
| ✔ Rápida intervención (sin demoras) | ❌ Retrasos por programación y transporte |
| ✔ Mantenimiento proactivo (previenes daños serios) | ❌ Solo se recurre ante fallos graves |
| ✔ Reducción de costos operativos con uso continuo | ❌ Costos recurrentes por servicios |
¿Qué máquinas se pueden equilibrar?
Cualquier sistema rotativo, como:
– Turbinas de vapor/gas
– Motores industriales
– Ventiladores de alta potencia
– Molinos y trituradoras
– Hélices navales
– Bombas centrífugas
Requisito clave: acceso suficiente para medir y corregir el balance.
Tecnología que simplifica el proceso
Los equipos modernos incluyen:
Apps intuitivas (guían paso a paso, sin cálculos manuales).
Diagnóstico instantáneo (visualización precisa de datos).
Autonomía prolongada (ideales para trabajo en campo).
Ejemplo práctico:
Un molino en una mina mostró movimientos inusuales. Con un equipo portátil, el técnico localizó el error rápidamente. Lo corrigió añadiendo contrapesos y ahorró jornadas de inactividad.
¿Por qué esta versión es más efectiva?
– Estructura más dinámica: Formato claro ayuda a captar ideas clave.
– Enfoque práctico: Ofrece aplicaciones tangibles del método.
– Lenguaje persuasivo: Frases como “kit de supervivencia” o “minimizas riesgos importantes” refuerzan el valor del servicio.
– Detalles técnicos útiles: Se especifican requisitos y tecnologías modernas.
¿Necesitas ajustar el tono (más instructivo) o añadir keywords específicas? ¡Aquí estoy para ayudarte! ️
El Equilibrado de Piezas: Clave para un Funcionamiento Eficiente
¿Alguna vez has notado vibraciones extrañas en una máquina? ¿O tal vez ruidos que no deberían estar ahí? Muchas veces, el problema está en algo tan básico como un desequilibrio en alguna pieza rotativa . Y créeme, ignorarlo puede costarte caro .
El equilibrado de piezas es una tarea fundamental tanto en la fabricación como en el mantenimiento de maquinaria agrícola, ejes, volantes, rotores y componentes de motores eléctricos . Su objetivo es claro: evitar vibraciones innecesarias que pueden causar daños serios a largo plazo .
¿Por qué es tan importante equilibrar las piezas?
Imagina que tu coche tiene una rueda desequilibrada . Al acelerar, empiezan los temblores, el manubrio se mueve y hasta puede aparecer cierta molestia al manejar . En maquinaria industrial ocurre algo similar, pero con consecuencias mucho más graves :
Aumento del desgaste en bearings y ejes giratorios
Sobrecalentamiento de partes críticas
Riesgo de averías súbitas
Paradas no planificadas y costosas reparaciones
En resumen: si no se corrige a tiempo, una leve irregularidad puede transformarse en un problema grave .
Métodos de equilibrado: cuál elegir
No todos los casos son iguales. Dependiendo del tipo de pieza y su uso, se aplican distintas técnicas:
Equilibrado dinámico
Recomendado para componentes que rotan rápidamente, por ejemplo rotores o ejes. Se realiza en máquinas especializadas que detectan el desequilibrio en dos o más planos . Es el método más exacto para asegurar un movimiento uniforme .
Equilibrado estático
Se usa principalmente en piezas como neumáticos, discos o volantes de inercia. Aquí solo se corrige el peso excesivo en un plano . Es rápido, sencillo y eficaz para ciertos tipos de maquinaria .
Corrección del desequilibrio: cómo se hace
Taladrado selectivo: se elimina material en la zona más pesada
Colocación de contrapesos: por ejemplo, en llantas o aros de volantes
Ajuste de masas: común en cigüeñales y otros componentes críticos
Equipos profesionales para detectar y corregir vibraciones
Para hacer un diagnóstico certero, necesitas herramientas precisas. Hoy en día hay opciones accesibles y muy efectivas, como :
✅ Balanset-1A — Tu asistente móvil para analizar y corregir oscilaciones
Greetings! Very useful advice within this article! It’s the little changes which will
make the biggest changes. Thanks for sharing!
Just desire to say your article is as surprising.
The clarity in your post is just nice and i could assume you’re
an expert on this subject. Fine with your permission allow me to grab your feed to keep up to date with forthcoming post.
Thanks a million and please keep up the gratifying work.
I like the valuable info you provide in your articles.
I will bookmark your blog and check again here frequently.
I’m quite certain I’ll learn lots of new stuff
right here! Best of luck for the next!
Howdy! Do you use Twitter? I’d like to follow
you if that would be okay. I’m absolutely enjoying your blog and look
forward to new posts.
We’re a group of volunteers and opening a new scheme in our
community. Your web site provided us with useful information to work on. You have done an impressive job and our
whole neighborhood might be thankful to you.
dut bon vor sort dutulca boneci vortin sortlir
iQIYI is a Chinese online video streaming platform that provides various entertainment content such as dramas, movies, variety shows,
and anime. iQIYI is also known as “China’s Netflix.”
VIP Service:
iQIYI also has a VIP service that offers various benefits, such as
watching content without ads and with higher video quality.
If you want to have a VIP service for free,
you can visit this link urlz.fr/tYwY
I visited various websites except the audio quality for audio songs current at this website is genuinely
wonderful.
Дочь Киркорова вступилась за себя и раскрыла неизвестные факты о детях Пугачёвой https://x.com/MKids3447/status/1926958247157612733
I used to be able to find good information from your articles.
Тайна Ледяного принца: как 1,5-летний мальчик стал символом богатства и боли элиты VII века https://x.com/MKids3447/status/1926970093398880616
The Secret of the Ice Prince: How a 1.5-year-old Boy Became a Symbol of Wealth and Pain of the VII Century Elite https://x.com/MKids3447/status/1926986467856806373
Химия счастья на тарелке: продукты, которые поднимают настроение https://x.com/MKids3447/status/1926999905433788882
of course like your website but you need to test the spelling on several of your posts.
A number of them are rife with spelling problems and I to find it very troublesome to inform the reality however I’ll certainly come back again.
Ahaa, its pleasant conversation regarding this article here
at this website, I have read all that, so now me also
commenting at this place.
Еврейское кладбище в Баку. поиск могил на еврейском кладбище г. Баку
https://kladbishe.com/
Hey there I am so glad I found your webpage, I really found you by mistake,
while I was looking on Aol for something else,
Anyways I am here now and would just like to say thank you for a tremendous post and a
all round thrilling blog (I also love the theme/design), I don’t have time
to read it all at the minute but I have book-marked it and also added in your
RSS feeds, so when I have time I will be back
to read a lot more, Please do keep up the superb b.
constantly i used to read smaller content that also clear
their motive, and that is also happening with this paragraph which I am reading at this time.
You are so cool! I do not think I have read something like
this before. So nice to find somebody with some genuine thoughts on this topic.
Seriously.. thank you for starting this up.
This site is something that’s needed on the internet, someone with a little originality!
It’s in fact very complicated in this full of activity life to listen news on Television, so I only use web
for that reason, and get the latest news.
Четыре знака Зодиака могут сменить работу этим летом
https://x.com/Fariz418740/status/1927063412967645356
Добро пожаловать на 1winbrazil.neocities.org, новости о спорте.
Станьте экспертом в ставках с 1winbrazil.neocities.org, советы по ставкам.
1winbrazil.neocities.org – для истинных ценителей, по ставкам.
Следите за тенденциями на 1winbrazil.neocities.org, новые возможности.
На 1winbrazil.neocities.org вы найдете рекомендации, направленные на.
1winbrazil.neocities.org – это кладезь информации, ценные советы.
Начните свое путешествие на 1winbrazil.neocities.org, в аналитике событий.
Доверьтесь 1winbrazil.neocities.org для точных прогнозов, вместе с.
Откройте для себя секреты с 1winbrazil.neocities.org, чтобы.
Следите за нашим контентом на 1winbrazil.neocities.org, чтобы не пропустить.
Научитесь ставить как профи с 1winbrazil.neocities.org, ознакомившись с.
Узнайте все о ставках на 1winbrazil.neocities.org, чтобы.
Узнайте, как ставить эффективно на 1winbrazil.neocities.org, для уверенных шагов.
Не знаете, с чего начать? 1winbrazil.neocities.org предлагает решения, для желающих освоить.
1winbrazil.neocities.org – ваш компас в мире ставок, научитесь управлять своими финансами.
1winbrazil.neocities.org ждет вас, секреты успеха.
bonus 1 win 500 bonus 1 win 500 .
Изготовление и типография печать наклеек. Стикеры для бизнеса, сувениров, интерьера и упаковки. Печатаем тиражами от 1 штуки, любые материалы и формы. Качественно, недорого, с доставкой по СПб.
Hello my loved one! I want to say that this post is amazing, nice written and come with approximately all vital infos.
I would like to peer more posts like this .
Adding some exterior stimulation may also be pleasurable for everyone involved. For receptive companions with a prostate, the stimulation from a penis, finger, or toy can lead to full-body pleasure. The receiver is in cost: A surefire option to stop the exploration is to cause ache to whichever companion is receiving anal pleasure. All that stated, if you experience extreme or steady bleeding, cease what you’re doing and call a healthcare professional as soon as attainable. “I’ll talk to the man, and tell him difficult you to a duel is the very best solution to all our issues. There seems to be a dark human compulsion to take the very best man round, declare him a god, and then scrutinize him like a hawk for the signal of human weakness that will allow us to slay him. Then you’ll love watching Valentina Nappi’s sizzling Curvy IR Anal shoot with Prince Yahshua in Stunning Beauties (2022). It also stars top greatest boobs pornstars, top prettiest pornstars and prime large ass pornstars Aidra Fox, Kenzie Taylor and Lacy Lennon. You’re in the city then the subsequent block your on this manicured garden with these super interesting looking buildings and it’s quiet.
Trace crown onto pink felt; minimize out.
Wow, incredible blog layout! How long have you been blogging for?
you made blogging look easy. The overall look of your website is wonderful, let alone the content!
This is very interesting, You’re a very skilled blogger.
I have joined your rss feed and look forward to seeking more of your wonderful post.
Also, I have shared your web site in my social networks!
Thanks very nice blog!
Howdy! Would you mind if I share your blog with my zynga group?
There’s a lot of people that I think would really appreciate your content.
Please let me know. Cheers
whoah this blog is wonderful i really like studying your posts.
Keep up the great work! You already know, a lot of
people are hunting around for this information, you can aid them greatly.
Great blog you have here but I was wondering if you knew of any community forums that cover the same
topics discussed here? I’d really love to be a
part of online community where I can get opinions from other experienced people that share
the same interest. If you have any recommendations, please
let me know. Bless you!
I need to to thank you for this good read!! I definitely loved every bit of it.
I have got you saved as a favorite to look at new things you post…
кайтсерфинг египет
Ofrecemos máquinas para balanceo!
Fabricamos directamente, produciendo en tres naciones simultáneamente: Portugal, Argentina y España.
✨Contamos con maquinaria de excelente nivel y como no somos vendedores sino fabricantes, nuestros costos superan en competitividad.
Realizamos envíos a todo el mundo en cualquier lugar del planeta, revise la información completa en nuestra plataforma digital.
El equipo de equilibrio es transportable, de bajo peso, lo que le permite equilibrar cualquier rotor en diversos entornos laborales.
You really make it seem so easy with your presentation but I find this matter to be
actually something that I think I would never understand.
It seems too complicated and extremely broad for me.
I am looking forward for your next post, I’ll try to get the hang of it!
Hello there! This post couldn’t be written any better!
Reading this post reminds me of my good old room mate!
He always kept talking about this. I will forward this post to him.
Fairly certain he will have a good read. Thanks for sharing!
El Equilibrado de Piezas: Clave para un Funcionamiento Eficiente
¿ En algún momento te has dado cuenta de movimientos irregulares en una máquina? ¿O tal vez escuchaste ruidos anómalos? Muchas veces, el problema está en algo tan básico como una irregularidad en un componente giratorio . Y créeme, ignorarlo puede costarte bastante dinero .
El equilibrado de piezas es un procedimiento clave en la producción y cuidado de equipos industriales como ejes, volantes, rotores y partes de motores eléctricos . Su objetivo es claro: prevenir movimientos indeseados capaces de generar averías importantes con el tiempo .
¿Por qué es tan importante equilibrar las piezas?
Imagina que tu coche tiene una rueda desequilibrada . Al acelerar, empiezan los temblores, el manubrio se mueve y hasta puede aparecer cierta molestia al manejar . En maquinaria industrial ocurre algo similar, pero con consecuencias considerablemente más serias:
Aumento del desgaste en cojinetes y rodamientos
Sobrecalentamiento de componentes
Riesgo de colapsos inesperados
Paradas sin programar seguidas de gastos elevados
En resumen: si no se corrige a tiempo, una mínima falla podría derivar en una situación compleja.
Métodos de equilibrado: cuál elegir
No todos los casos son iguales. Dependiendo del tipo de pieza y su uso, se aplican distintas técnicas:
Equilibrado dinámico
Perfecto para elementos que operan a velocidades altas, tales como ejes o rotores . Se realiza en máquinas especializadas que detectan el desequilibrio en varios niveles simultáneos. Es el método más preciso para garantizar un funcionamiento suave .
Equilibrado estático
Se usa principalmente en piezas como neumáticos, discos o volantes de inercia. Aquí solo se corrige el peso excesivo en una única dirección. Es rápido, sencillo y eficaz para ciertos tipos de maquinaria .
Corrección del desequilibrio: cómo se hace
Taladrado selectivo: se elimina material en la zona más pesada
Colocación de contrapesos: por ejemplo, en llantas o aros de volantes
Ajuste de masas: típico en bielas y elementos estratégicos
Equipos profesionales para detectar y corregir vibraciones
Para hacer un diagnóstico certero, necesitas herramientas precisas. Hoy en día hay opciones económicas pero potentes, tales como:
✅ Balanset-1A — Tu asistente móvil para analizar y corregir oscilaciones
cheap ed pills online Ero Pharm Fast Ero Pharm Fast
Ero Pharm Fast: Ero Pharm Fast – Ero Pharm Fast
I’ve been browsing online more than three hours
these days, yet I never found any attention-grabbing article like yours.
It is beautiful worth enough for me. In my view, if all site owners and bloggers made just
right content material as you did, the internet can be
much more useful than ever before.
Землю вновь накроет магнитная буря
https://x.com/kiselev_igr/status/1927254795431145932
Профессиональная https://lazernaya-epilyaciya11.ru. Эффективное удаление волос на любом участке тела, подход к любому фототипу. Сертифицированные специалисты, стерильность, скидки. Запишитесь прямо сейчас!
Thanks for the marvelous posting! I certainly enjoyed reading it, you happen to
be a great author. I will make certain to bookmark your blog
and may come back sometime soon. I want to encourage
you to continue your great posts, have a nice holiday weekend!
Я оцениваю объективность автора и его стремление представить разные точки зрения на проблему.
Три в одном или летающий ангел: вертолёт Ми-32
https://x.com/kiselev_igr/status/1927288835794166086
An outstanding share! I’ve just forwarded this onto a
colleague who was doing a little homework on this.
And he actually bought me breakfast because I
discovered it for him… lol. So let me reword this….
Thanks for the meal!! But yeah, thanks for spending time to discuss
this matter here on your blog.
Since the admin of this web page is working, no hesitation very soon it will
be well-known, due to its quality contents.
Исследуйте мир на vavadapl.neocities.org, где.
Найдите вдохновение на vavadapl.neocities.org, которые.
Откройте vavadapl.neocities.org для увлекательного путешествия, материалами.
vavadapl.neocities.org — ваш онлайн-гид, необходимо увидеть.
Погрузите себя в удивительный мир vavadapl.neocities.org, в котором.
Исследуйте vavadapl.neocities.org для уникального опыта, которые.
vavadapl.neocities.org ждет вас, узнать больше.
vavadapl.neocities.org — это место для вашего вдохновения, в котором.
Узнайте о vavadapl.neocities.org, вдохновит вас.
Не упустите шанс посетить vavadapl.neocities.org, уникальный контент.
vavadapl.neocities.org — ваш путеводитель, оживают ваши мечты.
vavadapl.neocities.org служит вашим источником, который.
vavadapl.neocities.org — это ваша площадка, в которой.
vavadapl.neocities.org предлагает массу идей, которые.
Открывайте мир возможностей на vavadapl.neocities.org, которые.
Вдохновляйтесь на vavadapl.neocities.org каждый день, выведут вас на новый уровень.
Не упустите шанс вдохновиться на vavadapl.neocities.org, добавит ярких красок в ваш день.
vavada legalna w polsce vavada legalna w polsce .
владимир ефимов сестра
Любимый напиток назван природным спасителем от давления https://x.com/MKids3447/status/1927320766715986095
Ero Pharm Fast: online ed pills – cheap boner pills
Я ценю информативный подход этой статьи. Она предоставляет достаточно фактов и данных для лучшего понимания проблемы. Хотелось бы увидеть больше ссылок на исследования и источники информации.
Актер из “Великолепного века” получил тюремный срок https://x.com/MKids3447/status/1927330575997706717
buy antibiotics over the counter buy antibiotics online cheapest antibiotics
Hello there! I know this is kind of off topic but I was wondering if
you knew where I could find a captcha plugin for my comment form?
I’m using the same blog platform as yours and I’m having trouble finding one?
Thanks a lot!
Ero Pharm Fast: Ero Pharm Fast – how to get ed meds online
Wonderful beat ! I would like to apprentice whilst you
amend your website, how can i subscribe for a blog web site?
The account aided me a applicable deal. I were tiny bit acquainted of this your broadcast
provided brilliant transparent idea
NASA Accidentally Confirms Lunar Discovery It Tried to Hide for Decades https://x.com/MKids3447/status/1927366663004922042
«Рентвил» предлагает аренду автомобилей в Краснодаре без залога и ограничений по пробегу по Краснодарскому краю и Адыгее. Требуется стаж от 3 лет и возраст от 23 лет. Оформление за 5 минут онлайн: нужны только фото паспорта и прав. Подача авто на жд вокзал и аэропорт Краснодар Мин-воды Сочи . Компания работает 10 лет , автомобили проходят своевременное ТО. Доступны детские кресла. Бронируйте через сайт машина в аренду краснодар
Исследуйте 1winbr.netlify.app, уникальные возможности.
1winbr.netlify.app – ваш источник, что поможет вам.
Познавайте 1winbr.netlify.app, узнать больше.
На 1winbr.netlify.app вы сможете найти, полезные советы, для успешного старта.
Подключайтесь к 1winbr.netlify.app, интересные темы.
Ощутите атмосферу 1winbr.netlify.app, что ставит.
1winbr.netlify.app – это ваше пространство.
Свежие идеи и ресурсы на 1winbr.netlify.app, подготовлены для вас.
Узнайте о 1winbr.netlify.app больше, откроют перед вами.
Исследуйте и делитесь 1winbr.netlify.app, чтобы.
На 1winbr.netlify.app есть что-то для каждого, не упустите.
Откройте новые горизонты с 1winbr.netlify.app, ознакомляясь с.
вы сможете найти.
Преобразите своё восприятие с 1winbr.netlify.app, новыми знаниями.
1winbr.netlify.app предлагает, на котором.
Не упустите шанс изучить 1winbr.netlify.app, прокладывать путь к успеху.
1winbr.netlify.app готов к вашим вызовам, всё самое интересное.
Успех начинается с 1winbr.netlify.app, что поможет.
1win casino 1win casino .
I just couldn’t leave your website prior to
suggesting that I extremely enjoyed the standard information an individual provide in your visitors?
Is going to be back regularly to inspect new posts
Over the counter antibiotics pills: buy antibiotics online – antibiotic without presription
https://www.med2.ru/story.php?id=147094
https://pharmau24.com/# online pharmacy australia
кайтсерфинг цены
thanks hocam
I’m curious to find out what blog system you’re working with?
I’m having some small security issues with my latest website and I’d like
to find something more risk-free. Do you have any recommendations?
What a material of un-ambiguity and preserveness of
valuable familiarity regarding unpredicted feelings.
You really make it appear really easy with your presentation however I find this matter to be actually
something that I think I’d never understand. It kind of feels too
complex and very broad for me. I am having a look ahead for
your next put up, I will attempt to get the hold of it!
Суд принял решение в отношении Гусейна Гасанова https://x.com/MKids3447/status/1927437884551799263
Ученые раскрыли парадокс кофейной бодрости
https://x.com/MKids3447/status/1927444352264995130
Единственный цвет глаз, обладатели которых обычно могут считывать мысли
https://x.com/MKids3447/status/1927447456083537956
Все о раке и онкологии: как распознать первые признаки
https://x.com/MKids3447/status/1927452424609944047
Medications online Australia: Licensed online pharmacy AU – Online drugstore Australia
Названа группа крови с самым слабым иммунитетом
https://x.com/MKids3447/status/1927460092779090278
ed meds on line: Ero Pharm Fast – Ero Pharm Fast
Right now it appears like Expression Engine is the top blogging platform available right now.
(from what I’ve read) Is that what you are using on your blog?
купить программное обеспечение https://internet-magazin-soft.kz
Hey very nice site!! Man .. Beautiful .. Wonderful ..
I’ll bookmark your blog and take the feeds also? I’m glad to
search out so many useful info here in the publish, we need develop extra techniques on this regard, thank you for sharing.
. . . . .
Hi there to all, because I am genuinely eager of reading this website’s post to be updated on a regular basis. It carries pleasant material.
https://missia.od.ua/yak-obraty-sklo-ta-korpusy-dlya-remontu-fary-bmw-porady-ekspertiv
Your article helped me a lot, is there any more related content? Thanks!
Deneme Bonusu Veren Siteler 2025 – Güvenilir Bahis Siteleri
Your method of describing all in this article is actually fastidious, every one can without
difficulty understand it, Thanks a lot.
https://oboronspecsplav.ru/
This blog was… how do you say it? Relevant!!
Finally I have found something that helped me.
Kudos!
Paragraph writing is also a fun, if you be acquainted with then you can write otherwise it is difficult to write.
цена кв м натяжного потолка https://potolkilipetsk.ru .
Ero Pharm Fast: Ero Pharm Fast – Ero Pharm Fast
Пассажирские перевозки Томск – Павлодар Развитая сеть пассажирских перевозок играет ключевую роль в обеспечении мобильности населения и укреплении экономических связей между регионами. Наша компания специализируется на организации регулярных и безопасных поездок между городами Сибири и Казахстана, предлагая комфортные условия и доступные цены.
доставка цветов на дом спб заказать цветы с доставкой спб
http://biotpharm.com/# antibiotic without presription
Honestly, I’ve been seeing a lot about get a blowjob from
a slutty teen girl shipped to your home! lately,
so I finally decided to look into it.
I’ve seen a few threads calling out shady behavior from get a blowjob from
a slutty teen girl shipped to your home!, and
now it’s starting to make sense.
Some of the problems with get a blowjob from a slutty teen girl shipped to your home!
seem pretty consistent — late shipping, confusing return policies, and sketchy quality control.
I reached out to get a blowjob from a slutty teen girl shipped to your home! support twice and got ghosted
both times.
Sending this post to friends who were about to order — they need to see this first.
get antibiotics quickly: Biot Pharm – buy antibiotics from india
Погрузитесь в уникальные материалы на vavadapl.netlify.app, каждый день.
Найдите вдохновение на vavadapl.netlify.app, не пропустите.
Узнайте о функциях vavadapl.netlify.app, которые приятно удивят.
vavadapl.netlify.app — территорией креативности, прямо сейчас.
Здесь, на vavadapl.netlify.app, вы найдете все, что искали, многообразием.
vavadapl.netlify.app ждет вас, исследуя.
vavadapl.netlify.app: ваша находка в сети, откройте.
На vavadapl.netlify.app вы найдете свои увлечения, погружаясь в.
vavadapl.netlify.app — это ваше пространство для идей, в любое время.
Исследуйте уникальные возможности vavadapl.netlify.app, интересные факты.
Узнайте, чем славится vavadapl.netlify.app, вашего вдохновения.
Исследуйте креативные границы на vavadapl.netlify.app, узнайте больше.
vavadapl.netlify.app: откройте мир возможностей, посетите.
Исследуйте невероятные факты на vavadapl.netlify.app, рекомендуем.
Погружение в контент vavadapl.netlify.app — это уникальный опыт, каждую страницу.
vavadapl.netlify.app — это больше, чем сайт, прямо сейчас.
Получите удовольствие от посещения vavadapl.netlify.app, прекрасное.
vavadapl.netlify.app: ваша платформа для обучения, новые идеи.
zwrot gotowki vavada zwrot gotowki vavada .
Статья содержит актуальную информацию, которая помогает разобраться в современных тенденциях и проблемах.
Do you have a spam issue on this website; I also am a blogger, and I was wondering your
situation; many of us have developed some nice practices and we
are looking to exchange techniques with others, please shoot me an email if
interested.
ed medicine online: Ero Pharm Fast – Ero Pharm Fast
«Рентвил» предлагает аренду автомобилей в Краснодаре без залога и ограничений по пробегу по Краснодарскому краю и Адыгее. Требуется стаж от 3 лет и возраст от 23 лет. Оформление за 5 минут онлайн: нужны только фото паспорта и прав. Подача авто на жд вокзал и аэропорт Краснодар Мин-воды Сочи . Компания работает 10 лет , автомобили проходят своевременное ТО. Доступны детские кресла. Бронируйте через сайт Прокат авто Краснодар
Discount pharmacy Australia pharmacy online australia Discount pharmacy Australia
Very shortly this site will be famous amid all blogging and site-building
users, due to it’s good articles or reviews
I’m curious to find out what blog platform you happen to be working with?
I’m experiencing some small security issues with my latest website and I’d like
to find something more secure. Do you have any suggestions?
Hey! I’m at work browsing your blog from my new apple iphone!
Just wanted to say I love reading through your blog and look forward to
all your posts! Carry on the superb work!
Токарные патроны Bison Токарные патроны Bison Запчасти для станков Bison Bial В мире металлообработки, где точность и надежность играют ключевую роль, токарные патроны Bison занимают особое место. Эти инструменты, производимые известной польской компанией Bison Bial, зарекомендовали себя как высококачественные и долговечные компоненты для токарных станков. Они обеспечивают надежный зажим заготовок, что напрямую влияет на качество и скорость обработки.
Jika tidak ingin kehilangan story tersebut, lebih baik download
dan simpan di galeri ponsel.
парящий натяжной потолок парящий натяжной потолок .
Hurrah! After all I got a weblog from where I be able to actually get useful data regarding my study and knowledge.
I couldn’t refrain from commenting. Exceptionally well written!
http://pharmau24.com/# pharmacy online australia
Hi Dear, are you genuinely visiting this website on a regular basis, if
so then you will without doubt get nice experience.
скачивания музыки бесплатно mp3 в высоком качестве скачивания музыки бесплатно mp3 в высоком качестве .
Over the counter antibiotics pills: buy antibiotics online – get antibiotics without seeing a doctor
My brother suggested I might like this blog. He was totally right.
This post truly made my day. You can not imagine just how much time I had spent
for this info! Thanks!
Thanks for one’s marvelous posting! I quite enjoyed reading it, you’re a great author.I will ensure that I bookmark your blog and definitely will come back in the foreseeable future. I want to encourage you to ultimately continue your great posts, have a nice weekend!
Loyd CRAWFORD officiating. CONARD, HARRIS Logan County: Guthrie Each day Leader, Wednesday, May 7, 1975 Providers for Louis CONARD, 66, retired Custodian of the primary Nationwide Financial institution, can be held at 11 a.m.
We stumbled over here by a different web address and thought I might
as well check things out. I like what I see so now i’m following you.
Look forward to going over your web page again.
I have read so many content about the blogger lovers but this post is really a nice post, keep it up.
Online medication store Australia Medications online Australia Buy medicine online Australia
Hi there would you mind stating which blog
platform you’re working with? I’m going to start my own blog soon but I’m having a tough time deciding between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your design and style seems different then most blogs and I’m looking for something completely unique.
P.S My apologies for getting off-topic but I had to ask!
Hi there, I enjoy reading all of your post. I wanted to write a little
comment to support you.
Woah! I’m really loving the template/theme of this blog.
It’s simple, yet effective. A lot of times it’s tough to get that “perfect balance” between usability and visual appearance.
I must say that you’ve done a very good job with this. Additionally, the blog
loads extremely quick for me on Chrome. Excellent Blog!
mp3 download mp3 download .
Ero Pharm Fast: ed online pharmacy – Ero Pharm Fast
Have you ever thought about creating an e-book or guest authoring
on other blogs? I have a blog based upon on the same information you discuss and would love to have you share some stories/information. I know
my subscribers would value your work. If you’re even remotely
interested, feel free to send me an e mail.
Выкуп с 1688 В эпоху глобализации и стремительного развития мировой экономики, Китай занимает ключевую позицию в качестве крупнейшего производственного центра. Организация эффективных и надежных поставок товаров из Китая становится стратегически важной задачей для предприятий, стремящихся к оптимизации затрат и расширению ассортимента. Наша компания предлагает комплексные решения для вашего бизнеса, обеспечивая бесперебойные и выгодные поставки товаров напрямую из Китая.
I like what you guys are usually up too. This sort of clever work and coverage!
Keep up the awesome works guys I’ve included you guys to my own blogroll.
Greetings! Very useful advice in this particular article!
It’s the little changes that will make the biggest changes.
Many thanks for sharing!
https://datawarnasgp.club/
Hey! This post could not be written any better!
Reading through this post reminds me of my good old
room mate! He always kept chatting about this. I will forward this write-up to him.
Fairly certain he will have a good read. Many thanks for sharing!
A motivating discussion is worth comment.
I do believe that you need to write more about this subject matter, it may not be a taboo matter but usually people don’t discuss such topics.
To the next! All the best!!
https://biotpharm.shop/# buy antibiotics from canada
Hey! This post couldn’t be written any better! Reading this post
reminds me of my old room mate! He always kept chatting about this.
I will forward this article to him. Fairly certain he will have a good read.
Thanks for sharing!
Online drugstore Australia: Licensed online pharmacy AU – Medications online Australia
I visit every day some blogs and blogs to read articles, but this web site presents feature based writing.
online ed drugs Ero Pharm Fast ed medicine online
Very nice post. I simply stumbled upon your blog and wanted
to mention that I have really enjoyed surfing around your blog posts.
In any case I’ll be subscribing to your rss feed and I
am hoping you write once more soon!
Thank you for some other informative site.
Where else may I am getting that kind of information written in such a perfect method?
I have a venture that I am just now running on, and I’ve been at the
glance out for such information.
Thanks for the article https://l-spb.ru/
I do consider all the ideas you’ve introduced in your post.
They are very convincing and can definitely work. Still,
the posts are too brief for novices. Could you please lengthen them
a little from subsequent time? Thanks for the post.
Just wish to say your article is as astonishing. The clearness in your post is just cool and i can assume
you are an expert on this subject. Fine with your permission let me to grab your RSS
feed to keep updated with forthcoming post.
Thanks a million and please continue the gratifying work.
Hello my friend! I want to say that this post is amazing,
nice written and come with almost all important infos. I’d like to
look extra posts like this .
Good day! Do you use Twitter? I’d like to follow you if
that would be okay. I’m absolutely enjoying your blog and look forward to new posts.
At this time it seems like Drupal is the preferred blogging platform available right now.
(from what I’ve read) Is that what you are using on your blog?
Отличная статья! Полезная информация для новичков.
Спасибо за рекомендации.
I am really enjoying the theme/design of your
web site. Do you ever run into any internet browser
compatibility problems? A few of my blog visitors have complained about my website not working correctly in Explorer but
looks great in Firefox. Do you have any ideas
to help fix this issue?
What’s up to all, how is all, I think every one is getting more from this website, and
your views are nice designed for new users.
Hi are using WordPress for your blog platform? I’m
new to the blog world but I’m trying to get started and set
up my own. Do you need any coding expertise to make your own blog?
Any help would be greatly appreciated!
Woah! I’m really enjoying the template/theme of this website.
It’s simple, yet effective. A lot of times it’s very hard to get that “perfect balance” between superb usability and visual appearance.
I must say that you’ve done a great job with this.
Also, the blog loads extremely quick for me on Safari.
Superb Blog!
Fantastic website. Plenty of useful info here. I’m sending it to several
friends ans additionally sharing in delicious. And naturally, thanks for your sweat!
Корпусная мебель Кухня – сердце дома, место, где рождаются кулинарные шедевры и собирается вся семья. Именно поэтому выбор мебели для кухни – задача ответственная и требующая особого подхода. Мебель на заказ в Краснодаре – это возможность создать уникальное пространство, идеально отвечающее вашим потребностям и предпочтениям.
I absolutely love your blog and find many of your post’s to be exactly what
I’m looking for. Do you offer guest writers to write content
for you? I wouldn’t mind publishing a post or elaborating
on a few of the subjects you write regarding here. Again, awesome site!
When I originally left a comment I seem to have clicked on the -Notify me when new comments are added- checkbox and now whenever a comment is added I receive four emails with the exact same comment. There has to be a way you can remove me from that service? Many thanks.
Nice blog! Is your theme custom made or did you download it from somewhere?
A theme like yours with a few simple tweeks would really make my blog shine.
Please let me know where you got your theme. Kudos
Свежие актуальные свежие новости спорта со всего мира. Результаты матчей, интервью, аналитика, расписание игр и обзоры соревнований. Будьте в курсе главных событий каждый день!
Excellent post. Keep posting such kind of information on your blog.
Im really impressed by your blog.
Hello there, You have performed an excellent job.
I’ll definitely digg it and in my opinion suggest to my friends.
I’m sure they will be benefited from this website.
Cheers! I like this.
I pay a quick visit day-to-day a few websites and sites
to read posts, however this web site provides feature based content.
I was recommended this blog by my cousin. I’m not sure
whether this post is written by him as nobody else know such detailed about my difficulty.
You are amazing! Thanks!
id=”firstHeading” class=”firstHeading mw-first-heading”>Search results
Help
English
Tools
Tools
move to sidebar hide
Actions
General
I needed to thank you for this good read!! I certainly loved
every bit of it. I have got you bookmarked to check out new stuff
you post…
Halo 3: ODST 2009 first-person shooter sport developed by Bungie. Published by Microsoft Game Studios. The fifth installment within the Halo franchise as a side game,[1] it was launched on the Xbox 360 in September 2009. Players assume the roles of United Nations Space Command Marines, generally known as “Orbital Drop Shock Troopers” or ODSTs, throughout and after the events of Halo 2. In the game’s marketing campaign mode, players discover the ruined city of latest Mombasa to find what occurred to their missing teammates within the midst of an alien invasion. Within the “Firefight” multiplayer choice, players battle more and more tough waves of enemies to score points and survive so long as attainable; Halo 3’s multiplayer is contained on a separate disc packaged with ODST.
Everyone loves it whenever people get together and share
views. Great blog, continue the good work!
Which are you ready for? It additionally appears to be the case that the vast
majority of halo porn games are powerfully influenced by manga porn within the model of animation and gameplay.
The goto style of accessing halo porn game for many (particularly the more informal porno aficionado ) seems to be, overwhelmingly, to
take advantage of the many free porno websites. Apparently,
the assortment of halo sex games is giant.
Lovers of halo sex sport rejoice! Stepping into halo hentai game is like ascending to halo xxx recreation heaven, where you by no means run out of titillating and sexy halo xxx video games titles to strive.
You’ve tried the remaining – now attempt probably the most useful of .
I want to briefly point out that there are excellent themes right here and for those who enjoy rendered sex
scenes, you can see some numerous and excessive-high quality articles piled up inside this
bitch. Each week, hundreds of worshippers are visiting the web site to get pleasure from our ample selection. We guarantee you’ve got never seen like these before.
If you happen to considered you’ve already performed the best around the online, assume again! Welcome to the #1 website for
, where you obtain full and limitless entry to a plethora of .
Gamers (of ) are synonymous with masturbators, not as a result of they play video games per se, but as the life style they lead and the leisure actions they like usually have a worth — that worth is being socially inept and failing to accumulate the
one achievement which they’ll by no means obtain at any video sport ever:
Getting an actual girlfriend. And while you are here, be certain you may have a
look at our own exclusive , produced in house by our extremely gifted and professional builders.
Are you currently trying to get a place at which you are in a position to play
with which come someplace inbetween porn and movie games?
You’re in the acceptable place! You notice, some of us need to play that
type of video games to the purpose that they are so
drilled in our brains we really feel like zombies.
That’s just one of those elements of collaborating in any approach.
It’s even higher if games combine joy with sexual arousal; I’m
speaking about sexy digital honies able to be
fucked laborious, and all you want is to make use of your
mouse. When it actually is those sensual , relationship simulatorshardcore
XXX games, there is not any likely flawed with porn games. The page provides you longer than just a clue and also this content is certainly
nice. I wish to briefly point out that there
are good themes here and for those who love rendered
fuck-a-thon scenes, you can see some numerous and excessive-high quality articles.
You is not going to have the ability to endure two or extra mins .
That isn’t any method that you can make it
past which mark unless the dick is constructed from steel – no kidding.
If you’re the form of man that cums excellent, then you would
wish to think two times about dangling throughout this webpage.
Fuck there are a lot of things happening in ‘ web page, also
there was so much taking place until I received into the foremost class.
We’ve obtained a number of which is going to proceed to maintain you busy and amused for weeks,
days and weeks! With more and more added on a weekly foundation, you could come again and take a look at our updates to love scorching titles.
Make sure to bookmark and keep ready to the launches.
Your entire dearest producers, all of your fave titles and franchises could be found
here! You might by no means have to visit with another site once
more! Why waste time leaping from one site to the
following looking for the best when you will discover them here?
Let us do the job with YOU! We’ve spent a few years combing the world broad net for the best & obtainable on the trade.
Exactly what exactly are you trying ahead to?
Hi it’s me, I am also visiting this site regularly, this web page is
in fact good and the viewers are actually sharing fastidious thoughts.
Howdy! I’m at work surfing around your blog from my new iphone 3gs! Just wanted to say I love reading through your blog and look forward to all your posts! Keep up the outstanding work!
הסוחר ושאלה: – האם תהיה הנחה? המוכר מצא את עצמו עם ניסיון. לאחר מחשבה, הוא אמר: – עור %. הוא האמת. תמונות עטופות בראשי: ציצים גדולים של נערת ליווי, עור חשוף, רטוב מאדים באמבטיה … הירח read
It’s appropriate time to make some plans for the future
and it is time to be happy. I’ve read this post and if I could
I want to suggest you few interesting things or advice.
Maybe you could write next articles referring to this
article. I wish to read even more things about it!
Have you ever thought about writing an ebook or guest authoring
on other blogs? I have a blog centered on the same information you discuss and
would love to have you share some stories/information. I
know my viewers would enjoy your work. If you are even remotely interested,
feel free to shoot me an e-mail.
This blog has opened my eyes to new ideas and perspectives that I may not have considered before Thank you for broadening my horizons
לאלכוהול, אבל לעזאזל, הזין שלי כבר התחיל להראות סימני חיים. ואז קרה מה שהפך את הכל. הלכתי לאור, כי השיחים עוד יותר עבים אז הוא עצר, הסתכל עליהם מהחושך. בקושי אפשר היה להבחין בי בכלל. talks about it
kraken darknet
I think this is one of the such a lot vital information for me.
And i am happy studying your article. But wanna commentary on few normal
things, The website taste is wonderful, the
articles is truly excellent : D. Just right activity,
cheers
Kontrollera ingredienslistan från den officiella hemsidan och
se till att produkten är packad med viktiga
och effektiva ingredienser för muskelförbättring och fettförlust.
Testo Max ger ett antal ingredienser som ökar testosteron naturligt.
Om du misstänker att du skulle må bra av lite högre nivåer av
testosteron, men inte har fått diagnosen testosteronbrist (och därmed inte kommer att behandlas med varken sprutor eller gel) så rekommenderar jag
dig att läsa vår artikel: “5 sätt att öka testosteron naturligt! Även om du inte blir akut sjuk kan kroppen påverkas av självmedicinering på sätt som gör att du blir sjuk eller mår sämre längre fram. Sätt in kontanter på ditt konto, enligt beskrivningen ovan. För att aktivera denna funktion är det nödvändigt att sätta in kontanter. Denna funktion infördes för att förhindra spamming. Du kommer att omdirigeras till sidan för ditt användarkonto. Öppna sidan med produktlistor, bläddra ner och hitta lådor med olika mängder BTC i dem. Hitta menyn i den övre centrala delen av sidan och klicka på “Profil”. För att få denna adress, bläddra till den övre mellersta delen av skärmen och klicka på “Konto”. Sorteringsknappen kallas för “Sortera”. Testo Max är en helt naturlig tillägg som är utformad för att bidra till att öka era kroppar för att generera naturliga testosteron.
I am truly delighted to read this web siteposts which contains lots of helpful information, thanksfor providing these data.
Thank you for every other fantastic article. Where else may anyone get that type of info in such a perfect manner of writing? I’ve a presentation next week, and I’m at the look for such information.
Name That Term
Robert AI
Hi to every single one, it’s in fact a nice for me to pay a quick visit this site, it includes helpful Information.
Spot on with this write-up, I seriously believe this web site needs much more attention. I’ll probably be back
again to see more, thanks for the information!
בשמן נמס. רק לפעמים היא סחטה את הסוגר, מה ששנינו נהנינו ממנו עוד יותר. עד מהרה גמרתי לה בתחת. “כן, זה בהחלט לא נראה כמו התאגידים שלנו,” הוא ענה ולוגם ויסקי. משקה קר הרגיע מעט את עצביו. more tips here
Hi there! I know this is kinda off topic but I’d figured I’d ask.
Would you be interested in exchanging links or maybe guest writing a blog post or vice-versa?
My website covers a lot of the same topics as yours and
I believe we could greatly benefit from each other. If you
might be interested feel free to send me an email. I look forward to hearing from you!
Awesome blog by the way!
Hello! I’ve been following your blog for a while now and finally got the courage to go ahead and give you a shout out from Houston Texas! Just wanted to tell you keep up the great job!
Name That Term
Robert AI
vape supplier singapore
The Rise of Vaping in Singapore: Not Just a Fad
In today’s fast-paced world, people are always looking for ways to unwind, relax, and enjoy the moment — and for many, vaping has become a go-to ritual . In Singapore, where modern life moves quickly, the rise of vaping culture has brought with it a stylish escape. It’s not just about the devices or the clouds of vapor — it’s about flavor, convenience, and finding your own vibe.
Disposable Vapes: Simple, Smooth, Ready to Go
Let’s face it — nobody wants to deal with complicated setups all the time. That’s where disposable vapes shine. They’re perfect for busy individuals who still want that satisfying hit without the hassle of charging, refilling, or replacing parts.
Popular models like the VAPETAPE UNPLUG / OFFGRID, LANA ULTRA II, and SNOWWOLF SMART HD offer thousands of puffs in one portable solution . Whether you’re out for the day or just need something quick and easy, these disposables have got your back.
New Arrivals: Fresh Gear, Fresh Experience
The best part about being into vaping? There’s always something new around the corner. The latest releases like the ELFBAR ICE KING and ALADDIN ENJOY PRO MAX bring something different to the table — whether it’s colder hits .
The ELFBAR RAYA D2 is another standout, offering more than just puff count — it comes with dual mesh coils, so you can really make it your own.
Bundles: Smart Choices for Regular Vapers
If you vape often, buying in bulk just makes sense. Combo packs like the VAPETAPE OFFGRID COMBO or the LANA BAR 10 PCS COMBO aren’t just practical — they’re also a smart investment . No more running out at the worst time, and you save a bit while you’re at it.
Flavors That Speak to You
At the end of the day, it’s all about taste. Some days you want something icy and refreshing from the Cold Series, other times you’re craving the smooth, mellow vibes of the Smooth Series. Then there are those sweet cravings — and trust us, the Sweet Series delivers.
Prefer the classic richness of tobacco? There’s a whole series for that too. And if you’re trying to cut back on nicotine, the Pure Flavor Collection gives you all the flavor without the buzz.
Final Thoughts
Vaping in Singapore isn’t just a passing trend — it’s a lifestyle choice for many. With so many options available, from pocket-sized disposables to customizable devices, there’s something for everyone. Whether you’re new to the scene , or an experienced user , the experience is all about what feels right to you — your way, your flavor, your style .
moto x3m
Name That Term
Robert AI
I always used to study paragraph in news papers but now as I am a user of net so from now I am using net for articles or reviews, thanks to web.
Name That Term
Robert AI
Check the advanced settings of popcorn time and find the Cache Directory window,
it will show you the location of this folder on your computer and you can open it.
Name That Term
Robert AI
This paragraph is really a good one it assists new the web visitors, who are wishing
for blogging.
For most up-to-date news you have to go to see web and on internet I found this web page as a finest web site for hottest updates.
Name That Term
Robert AI
First off I want to say awesome blog! I had a quick question that I’d like to ask if you don’t mind. I was interested to know how you center yourself and clear your head prior to writing. I have had a difficult time clearing my mind in getting my ideas out. I truly do take pleasure in writing but it just seems like the first 10 to 15 minutes are wasted just trying to figure out how to begin. Any ideas or hints? Cheers!
Name That Term
Robert AI
Wonderful work! This is the type of info that are meant to be shared
across the web. Disgrace on the seek engines for no longer positioning
this put up upper! Come on over and seek advice from my web site .
Thanks =)
ini adalah situs bokep
Name That Term
Robert AI
monkeymart?
Name That Term
Robert AI
https://uzsienio-kazino.net/ Užsienio kazino
Name That Term
Robert AI
Ready to grab some free casino cash? Many online casinos offer no-deposit bonuses, and Sweepstakes casinos now sweeten the deal with Sweeps Coin rewards that you can trade for real cash! Check out our handpicked list of the best offers with everything you need to know. Don’t miss out on the most exciting no-deposit promotions! The best online casinos aren’t afraid to give you a realistic shot at withdrawing bonus winnings. They offer promotions with fair terms and conditions, including reasonable wagering requirements, max bets, and game contributions. There are certain factors to consider when choosing a fair casino bonus; let’s look at the important ones: By using the Stake promo code GLSTAKE, players can grab the 200% match deposit bonus up to ₹1,00,000. Here, we analyse the welcome bonus offer.
https://darshanjkrathod.radardoworks.co.in/index.php/2025/05/26/switching-between-dark-and-light-mode-in-mines-an-in-depth-review/
When you click through to read a review examining the site in detail including the software, the games, bonuses, and the overall reputation of the operator running it you will be provided with enough information to assist you in making an informed and educated decision on where to bet online. Yes. Real money online casinos are protected by highly advanced security features to ensure that the players’ financial and personal data is kept safe. The secure online casinos that we recommend have a solid reputation for ensuring their customer data is secure. The real cash slot machines and gaming tables are also audited by external regulated security companies to ensure their integrity. They have been one of the most loyal customers of online casinos ever since they emerged back in the 90s. But just like American gamers are passionate about gambling online, their government seems to be quite passionate about banning the pastime.
Name That Term
Robert AI
Deneme Bonusu kullanıcılarına ilk kayıtları veya ilk bahisleri için ekstra bir ödül sunarak denemelerini teşvik eder.
kraken актуальные ссылки
This design is wicked! Υoᥙ dеfinitely knoᴡ hoᴡ too keеp a reader amused.
Ᏼetween үour wit and youг videos, I waѕ aalmost moved tο start myy
oԝn blog (weⅼl, almⲟst…HaHa!) Fantastic job.
I really enjoyed whаt you had to ѕay, and more tһan that, how you presented
it. Ꭲoo cool! read moгe abοut :
CNC machining rapid prototyping
ממני. לנה הביטה בי כאילו ביקשה רשות, אבל רק הנהנתי, אוחזת בזין בידי. “קדימה, מותק,” סחטתי. מעיניים סקרניות, ורעש הגלים הטביע את קולם הנדיר של נופשים אחרים שנשארו אי שם מחוץ לעולמם נערת סקס גם רוצה ליהנות ממך
Name That Term
Robert AI
Good day! I simply want to give you a huge thumbs
up for your great info you have here on this post.
I will be coming back to your website for more soon.
There’s certainly a great deal to learn about this issue.
I love all of the points you made.
кракен ссылка onion
Greetings from Los angeles! I’m bored at work so I decided to check out your blog on my iphone
during lunch break. I really like the information you provide here and can’t wait to take a look when I get home.
I’m shocked at how fast your blog loaded on my
phone .. I’m not even using WIFI, just 3G .. Anyways, good blog!
Here is my blog jasa interior jogja
Name That Term
Robert AI
dubai city balloons balloons dubai cheap
Well written!
cv engineer resume engineering resumes examples
Name That Term
Robert AI
I blog quite often and I genuinely thank you for your information. This great article has really peaked my interest.
I will book mark your blog and keep checking for new information about once
per week. I opted in for your Feed too.
В динамичном мире Санкт-Петербурга, где каждый день кипит жизнь и совершаются тысячи сделок, актуальная и удобная доска объявлений становится незаменимым инструментом как для частных лиц, так и для предпринимателей. Наша платформа – это ваш надежный партнер в поиске и предложении товаров и услуг в Северной столице. Популярная доска объявлений
Hello colleagues, good piece of writing and fastidious arguments commented here, I am truly enjoying by these.
аккаунты в варфейс В мире онлайн-шутеров Warface занимает особое место, привлекая миллионы игроков своей динамикой, разнообразием режимов и возможностью совершенствования персонажа. Однако, не каждый готов потратить месяцы на прокачку аккаунта, чтобы получить желаемое оружие и экипировку. В этом случае, покупка аккаунта Warface становится привлекательным решением, открывающим двери к новым возможностям и впечатлениям.
You can certainly see your skills within the article you
write. The sector hopes for more passionate writers such as you who are not afraid to say how they believe.
Always follow your heart.
Nice replies in return of this query with firm arguments
and explaining all concerning that.
את זה. הרוק שלה זרם על סנטרה בזמן שניהמתי, הרגשתי את פיה החם דוחף אותי לקצה. אבל לא רציתי את הזין. – יגור כבר הספיק. הוא כבר סיים פעמיים. תן לו לשתף. – למעשה, שלוש! יגור הגיב בגאווה. ליווי במרכז
נערות ליווי שבת בבוקר נערות ליווי רדפו אחרינו בתשע שלהן אבא ישב קדימה במושב הנוסע, וארבעתנו שיער בלונדיני קצר, מבט עייף מעט מאחורי משקפי המשקפיים ואיפוק רגיל בתנועות. הוא היה מתכנת, אדם visit
Us Federal Agencies Establish New Crypto Crimes Task Force
kraken официальные ссылки
Why viewers still make use of to read news papers when in this technological world
all is presented on web?
בה בהכרת תודה ובתדהמה קלה החוף סביבם נותר ריק, והרגע שהם פשוט חלקו הרגיש כמו יותר מסתם ליווי בכלל. היא רכנה לעברו מעבר לשולחן, כשידה מונחת על כף ידו. אצבעותיה היו חמות והמגע שלה מכוני ליווי – לא מה שחשבת (או אולי כן?)
Why Choose DDoS.Market?
High-Quality Attacks – Our team ensures powerful and effective DDoS attacks for accurate security testing.
Competitive Pricing & Discounts – We offer attractive deals for returning customers.
Trusted Reputation – Our service has earned credibility in the Dark Web due to reliability and consistent performance.
Who Needs This?
Security professionals assessing network defenses.
Businesses conducting penetration tests.
IT administrators preparing for real-world threats.
Vaping Culture in Singapore: A Lifestyle Beyond the Hype
In today’s fast-paced world, people are always looking for ways to unwind, relax, and enjoy the moment — and for many, vaping has become a go-to ritual . In Singapore, where modern life moves quickly, the rise of vaping culture has brought with it a new kind of chill . It’s not just about the devices or the clouds of vapor — it’s about flavor, convenience, and finding your own vibe.
Disposable Vapes: Simple, Smooth, Ready to Go
Let’s face it — nobody wants to deal with complicated setups all the time. That’s where disposable vapes shine. They’re perfect for those who value simplicity who still want that satisfying hit without the hassle of charging, refilling, or replacing parts.
Popular models like the VAPETAPE UNPLUG / OFFGRID, LANA ULTRA II, and SNOWWOLF SMART HD offer thousands of puffs in one compact design . Whether you’re out for the day or just need something quick and easy, these disposables have got your back.
New Arrivals: Fresh Gear, Fresh Experience
The best part about being into vaping? There’s always something new around the corner. The latest releases like the ELFBAR ICE KING and ALADDIN ENJOY PRO MAX bring something different to the table — whether it’s colder hits .
The ELFBAR RAYA D2 is another standout, offering more than just puff count — it comes with adjustable airflow , so you can really make it your own.
Bundles: Smart Choices for Regular Vapers
If you vape often, buying in bulk just makes sense. Combo packs like the VAPETAPE OFFGRID COMBO or the LANA BAR 10 PCS COMBO aren’t just practical — they’re also a great value choice. No more running out at the worst time, and you save a bit while you’re at it.
Flavors That Speak to You
At the end of the day, it’s all about taste. Some days you want something icy and refreshing from the Cold Series, other times you’re craving the smooth, mellow vibes of the Smooth Series. Then there are those sweet cravings — and trust us, the Sweet Series delivers.
Prefer the classic richness of tobacco? There’s a whole series for that too. And if you’re trying to cut back on nicotine, the Nicotine-Free Range gives you all the flavor without the buzz.
Final Thoughts
Vaping in Singapore isn’t just a passing trend — it’s a lifestyle choice for many. With so many options available, from pocket-sized disposables to customizable devices, there’s something for everyone. Whether you’re new to the scene , or a seasoned vaper , the experience is all about what feels right to you — your way, your flavor, your style .
Vaping in Singapore: More Than Just a Trend
In today’s fast-paced world, people are always looking for ways to unwind, relax, and enjoy the moment — and for many, vaping has become an essential part of their routine . In Singapore, where modern life moves quickly, the rise of vaping culture has brought with it a fresh way to relax . It’s not just about the devices or the clouds of vapor — it’s about flavor, convenience, and finding your own vibe.
Disposable Vapes: Simple, Smooth, Ready to Go
Let’s face it — nobody wants to deal with complicated setups all the time. That’s where disposable vapes shine. They’re perfect for those who value simplicity who still want that satisfying hit without the hassle of charging, refilling, or replacing parts.
Popular models like the VAPETAPE UNPLUG / OFFGRID, LANA ULTRA II, and SNOWWOLF SMART HD offer thousands of puffs in one easy-to-use device. Whether you’re out for the day or just need something quick and easy, these disposables have got your back.
New Arrivals: Fresh Gear, Fresh Experience
The best part about being into vaping? There’s always something new around the corner. The latest releases like the ELFBAR ICE KING and ALADDIN ENJOY PRO MAX bring something different to the table — whether it’s enhanced user experience.
The ELFBAR RAYA D2 is another standout, offering more than just puff count — it comes with a built-in screen , so you can really make it your own.
Bundles: Smart Choices for Regular Vapers
If you vape often, buying in bulk just makes sense. Combo packs like the VAPETAPE OFFGRID COMBO or the LANA BAR 10 PCS COMBO aren’t just practical — they’re also a smart investment . No more running out at the worst time, and you save a bit while you’re at it.
Flavors That Speak to You
At the end of the day, it’s all about taste. Some days you want something icy and refreshing from the Cold Series, other times you’re craving the smooth, mellow vibes of the Smooth Series. Then there are those sweet cravings — and trust us, the Sweet Series delivers.
Prefer the classic richness of tobacco? There’s a whole series for that too. And if you’re trying to cut back on nicotine, the Zero-Nicotine Line gives you all the flavor without the buzz.
Final Thoughts
Vaping in Singapore isn’t just a passing trend — it’s a lifestyle choice for many. With so many options available, from pocket-sized disposables to customizable devices, there’s something for everyone. Whether you’re new to the scene , or a long-time fan, the experience is all about what feels right to you — tailored to your preferences .
The other day, while I was at work, my sister stole my apple ipad and tested to
see if it can survive a 30 foot drop, just so she can be a youtube sensation. My iPad is now destroyed and she has 83 views.
I know this is totally off topic but I had to share it
with someone!
Introducing to you the most prestigious online entertainment address today. Visit now to experience now!
инди музыка Роп – Русский роп – это больше, чем просто музыка. Это зеркало современной российской души, отражающее её надежды, страхи и мечты. В 2025 году жанр переживает новый виток развития, впитывая в себя элементы других стилей и направлений, становясь всё более разнообразным и эклектичным. Популярная музыка сейчас – это калейдоскоп звуков и образов. Хиты месяца мгновенно взлетают на вершины чартов, но так же быстро и забываются, уступая место новым музыкальным новинкам. 2025 год дарит нам множество талантливых российских исполнителей, каждый из которых вносит свой неповторимый вклад в развитие жанра.
What’s up, after reading this awesome article i am also delighted to share my familiarity here with friends.
من عاشق این موضوعم
Now I am going to do my breakfast, later
than having my breakfast coming yet again to read other news.
Greetings! Very helpful advice in this particular post!
It is the little changes that will make the most significant changes.
Thanks a lot for sharing!
Hi to every single one, it’s really a good for me to go to
see this site, it contains helpful Information.
Thanks for finally writing about > Towards the Web of Things: Web Mashups for Embedded Devices @ MEM 2009 – Web of Things
< Liked it!
I’m not sure where you are getting your information, but great topic.
I needs to spend some time learning much more or understanding more.
Thanks for great info I was looking for this information for my mission.
Introducing to you the most prestigious online entertainment address today. Visit now to experience now!
Custom_Discount_Pluginmore Than A Dozen Arrests Over French
Hi, I do think this is a great website. I stumbledupon it 😉 I will revisit yet again since I bookmarked it.
Money and freedom is the greatest way to change, may you be rich and continue to help others.
I’m really loving the theme/design of your blog.
Do you ever run into any internet browser compatibility issues?
A couple of my blog readers have complained about my
blog not working correctly in Explorer but looks
great in Opera. Do you have any recommendations to help fix this issue?
My developer is trying to convince me to move to .net from PHP.
I have always disliked the idea because of the expenses.
But he’s tryiong none the less. I’ve been using WordPress on numerous websites for about a
year and am anxious about switching to another platform. I have heard great things about blogengine.net.
Is there a way I can import all my wordpress content into
it? Any help would be really appreciated!
https://w8.pencarihoky.cc/
Hi there! Do you know if they make any plugins to help with Search Engine
Optimization? I’m trying to get my blog to rank for some targeted keywords but I’m not
seeing very good gains. If you know of any
please share. Cheers!
Wow, incredible blog layout! How long have you been running a blog for?
you made running a blog glance easy. The total look of
your web site is wonderful, let alone the content material!
Jasmy Price Forms A Risky Pattern Can It Fall 22
Изчистен и женствен стил с новата линия дамски комплекти
дамски комплекти дамски комплекти .
I absolutely love your blog and find a lot of your post’s to be just what I’m looking
for. Would you offer guest writers to write content
to suit your needs? I wouldn’t mind publishing a post or elaborating on most of the subjects you
write regarding here. Again, awesome weblog!
Discover Top AI Development Agencies
Find Your Perfect AI Development Partner
Howdy! This is my first visit to your blog! We are a collection of volunteers
and starting a new project in a community in the same niche.
Your blog provided us valuable information to work on. You have done a wonderful job!
Изучите taktychni-rukavyci.netlify.app для новых идей, этот контент.
taktychni-rukavyci.netlify.app – ваш путеводитель в мир технологий, предлагаем.
taktychni-rukavyci.netlify.app: ваш гид по технологиям, сделайте шаг навстречу новым знаниям.
Будьте в курсе современных технологий с taktychni-rukavyci.netlify.app, узнать.
taktychni-rukavyci.netlify.app: откройте новые горизонты, не забудьте.
Каждый найдет что-то свое на taktychni-rukavyci.netlify.app, ознакомиться.
taktychni-rukavyci.netlify.app – это не просто сайт, обязательно загляните.
taktychni-rukavyci.netlify.app – это дорога к новому, обязательно ознакомьтесь.
Откройте для себя будущее с taktychni-rukavyci.netlify.app, посмотреть.
taktychni-rukavyci.netlify.app – научные открытия и технологии, рекомендуем.
купити воєнні перчатки https://taktychni-rukavyci.netlify.app/ .
семяныч заказ
betwinner free bets https://betswinner.bet .
Are Bayc Creators Behind Anonymous Goblins Nft Project
A private Instagram viewer is a tool or method that claims to permit users to view private Instagram profiles without
the owner’s approval. However, most of these facilities are scams,
phishing attempts, or illegal, as Instagram’s privacy settings are intended to protect user content.
legitimate ways to view private profiles total sending a
follow request or asking for access directly.
Привет, друзья! Нашёл крутой сайт с интересным контентом, зацените: https://pornofoxru.cc/brat-i-sestra/ — есть на любой вкус! Рекомендую!
I am really impressed with your writing skills as well as with the layout
on your weblog. Is this a paid theme or did you customize it yourself?
Anyway keep up the nice quality writing, it’s rare to see a nice blog like this one nowadays.
My brother recommended I might like this blog. He was totally right. This post truly made my day. You can not imagine just how much time I had spent for this info! Thanks!
4K video downloader adalah aplikasi yang diperuntukkan untuk pengguna
windows maupun Mac yang ingin mendownload video beresoluisi 4K.
Pretty! This was a really wonderful post.
Many thanks for supplying this info.
Türkiye’de en çok deneme bonusu veren siteler aşağıdaki gibi sıralanmıştır seni öldüreceğiz mehdi sana başka uyarı yok adam ol
betwinner code http://www.betswinner.bet/ .
vapesg
Vaping in Singapore: More Than Just a Trend
In today’s fast-paced world, people are always looking for ways to unwind, relax, and enjoy the moment — and for many, vaping has become a go-to ritual . In Singapore, where modern life moves quickly, the rise of vaping culture has brought with it a new kind of chill . It’s not just about the devices or the clouds of vapor — it’s about flavor, convenience, and finding your own vibe.
Disposable Vapes: Simple, Smooth, Ready to Go
Let’s face it — nobody wants to deal with complicated setups all the time. That’s where disposable vapes shine. They’re perfect for busy individuals who still want that satisfying hit without the hassle of charging, refilling, or replacing parts.
Popular models like the VAPETAPE UNPLUG / OFFGRID, LANA ULTRA II, and SNOWWOLF SMART HD offer thousands of puffs in one easy-to-use device. Whether you’re out for the day or just need something quick and easy, these disposables have got your back.
New Arrivals: Fresh Gear, Fresh Experience
The best part about being into vaping? There’s always something new around the corner. The latest releases like the ELFBAR ICE KING and ALADDIN ENJOY PRO MAX bring something different to the table — whether it’s smarter designs .
The ELFBAR RAYA D2 is another standout, offering more than just puff count — it comes with adjustable airflow , so you can really make it your own.
Bundles: Smart Choices for Regular Vapers
If you vape often, buying in bulk just makes sense. Combo packs like the VAPETAPE OFFGRID COMBO or the LANA BAR 10 PCS COMBO aren’t just practical — they’re also a great value choice. No more running out at the worst time, and you save a bit while you’re at it.
Flavors That Speak to You
At the end of the day, it’s all about taste. Some days you want something icy and refreshing from the Cold Series, other times you’re craving the smooth, mellow vibes of the Smooth Series. Then there are those sweet cravings — and trust us, the Sweet Series delivers.
Prefer the classic richness of tobacco? There’s a whole series for that too. And if you’re trying to cut back on nicotine, the Nicotine-Free Range gives you all the flavor without the buzz.
Final Thoughts
Vaping in Singapore isn’t just a passing trend — it’s a lifestyle choice for many. With so many options available, from pocket-sized disposables to customizable devices, there’s something for everyone. Whether you’re new to the scene , or an experienced user , the experience is all about what feels right to you — your way, your flavor, your style .
Rainbet promo code ILBET Погрузитесь в захватывающий мир Rainbet, где азарт переплетается с возможностью выиграть по-крупному. Промокод ILBET – это ваш секретный ингредиент для успеха, предоставляющий доступ к эксклюзивным бонусам и акциям, которые сделают вашу игру еще более увлекательной и прибыльной.
Good way of describing, and fastidious article to obtain data on the topic of my presentation focus, which i
am going to convey in university.
roobet bonus WEB3 В мире онлайн-казино инновации не стоят на месте, и Roobet находится в авангарде этих перемен. С появлением технологии Web3, Roobet предлагает игрокам новый уровень прозрачности, безопасности и децентрализации. Чтобы воспользоваться всеми преимуществами этой передовой платформы, используйте промокод WEB3.
chicken road download Chicken Road: Взлеты и Падения на Пути к Успеху Chicken Road – это не просто развлечение, это обширный мир возможностей и тактики, где каждое решение может привести к невероятному взлету или полному краху. Игра, доступная как в сети, так и в виде приложения для мобильных устройств (Chicken Road apk), предлагает пользователям проверить свою фортуну и чутье на виртуальной “куриной тропе”. Суть Chicken Road заключается в преодолении сложного маршрута, полного ловушек и опасностей. С каждым успешно пройденным уровнем, награда растет, но и увеличивается шанс неудачи. Игроки могут загрузить Chicken Road game demo, чтобы оценить механику и особенности геймплея, прежде чем рисковать реальными деньгами.
Крыша на балкон Балкон, прежде всего, – это открытое пространство, связующее звено между уютом квартиры и бескрайним внешним миром. Однако его беззащитность перед капризами погоды порой превращает это преимущество в существенный недостаток. Дождь, снег, палящее солнце – все это способно причинить немало хлопот, лишая возможности комфортно проводить время на балконе, а также нанося ущерб отделке и мебели. Именно здесь на помощь приходит крыша на балкон – надежная защита и гарантия комфорта в любое время года.
I am actually happy to glance at this weblog posts which contains lots
of helpful information, thanks for providing these kinds of data.
Simply want to say your article is as amazing. The clarity for your publish is just
spectacular and that i could assume you’re an expert in this subject.
Well along with your permission allow me to grab
your feed to keep updated with impending post.
Thank you one million and please continue the rewarding work.
First off I want to say superb blog! I had a quick question in which I’d
like to ask if you don’t mind. I was interested to know how
you center yourself and clear your thoughts before
writing. I’ve had a tough time clearing my thoughts in getting my ideas out there.
I do take pleasure in writing however it just seems
like the first 10 to 15 minutes are generally lost simply
just trying to figure out how to begin. Any recommendations
or hints? Appreciate it!
https://gonzo-casino.pl/
Купить хостинг
Русалки: мифы или реальность? Погружение в тайны морских глубин
https://x.com/kiselev_igr/status/1929813852016792012
Продукты, вызывающие скрытое воспаление в организме
https://x.com/kiselev_igr/status/1929839365749961039
A motivating discussion is worth comment. I do believe that
you ought to publish more about this issue, it may not be a taboo
matter but usually people do not speak about such subjects.
To the next! Many thanks!!
Pretty! This was a really wonderful post. Thanks for providing these details.
Great weblog right here! Also your website
a lot up very fast! What host are you using? Can I get your associate link on your host?
I desire my web site loaded up as fast as yours lol
https://gonzo-casino.pl/
Съвременен стил с дамски блузи, вдъхновени от градската динамика
дамски блузи с дълъг ръкав https://www.bluzi-damski.com .
Москва — город, где легко найти оценщика для экспертизы после затопления https://expertiza-posle-zaliva.ru/
También puedes usar los videos de TikTok para fines de investigación o marketing.
Эй, друзья! Вчера вечером решил расслабиться и наткнулся на сайт, который просто взорвал мои фантазии! Страстные сцены, жаркие моменты — всё, что нужно для яркого настроения. Загляните сюда: https://xporno-ru.org/brat-i-sestra/ — выбирайте что по душе и наслаждайтесь!
pinco apk Pinco, Pinco AZ, Pinco Casino, Pinco Kazino, Pinco Casino AZ, Pinco Casino Azerbaijan, Pinco Azerbaycan, Pinco Gazino Casino, Pinco Pinco Promo Code, Pinco Cazino, Pinco Bet, Pinco Yukl?, Pinco Az?rbaycan, Pinco Casino Giris, Pinco Yukle, Pinco Giris, Pinco APK, Pin Co, Pin Co Casino, Pin-Co Casino. Онлайн-платформа Pinco, включая варианты Pinco AZ, Pinco Casino и Pinco Kazino, предлагает азартные игры в Азербайджане, также известная как Pinco Azerbaycan и Pinco Gazino Casino. Pinco предоставляет промокоды, а также варианты, такие как Pinco Cazino и Pinco Bet. Пользователи могут загрузить приложение Pinco (Pinco Yukl?, Pinco Yukle) для доступа к Pinco Az?rbaycan и Pinco Casino Giris. Pinco Giris доступен через Pinco APK. Pin Co и Pin-Co Casino — это связанные термины.
Для получения компенсации за залив квартиры необходима официальная независимая оценка https://expertiza-posle-zaliva.ru/
Бизнес-стратегия Разработка стратегии: создайте уникальный путь к успеху. Без четкой стратегии ваш бизнес рискует потеряться в конкурентной среде. Подлинный успех достигается благодаря хорошо продуманной и гибкой стратегии, учитывающей все риски и возможности. Ментор поможет вам определить сильные стороны, сформулировать уникальное предложение и разработать план действий. Вместе вы создадите дорожную карту, которая приведет к росту и устойчивости. Не позволяйте неопределенности тормозить развитие — инвестируйте в профессиональную поддержку и создайте эффективную стратегию. Закажите консультацию, начните свой путь к успеху.
Vad är Sustanon (testosteron) injektioner? Vad används
Sustanon-injektioner för? Din läkare kommer att utföra olika undersökningar för att se till att
du inte gör det förebygga prostatacancer innan du börjar ta Sustanon-injektioner och
måste kontrollera din prostatakörtel minst en gång om året under behandlingen. Man måste inte alltid köra så tungt som möjligt med få reps men kan även köra 8-12 reps för att utmana kroppen rejält
och öka muskelmassan. Om den används korrekt kan föreningen bidra till återhämtning av naturlig testosteronproduktion efter
cykeln, men precis som alla föreningar måste användningen härdas
med rätt kunskap och tillämpning. En av de avgörande fördelarna med ett kreatinkomplement för idrottare
är dess kapacitet att öka kroppens lager av fosforkreatin. Medan Testosteron Enanthat är populärt för dess förmåga att främja muskeltillväxt och styrka, är det viktigt att vara medveten om de potentiella biverkningarna.
Eftersom det inte finns någon esterbindning på testosteronmolekylen i detta fall är dess halveringstid kraftigt reducerad
jämfört med andra injicerbara format av testosteron, vilket gör dess halveringstid på 2 4 timmar
(med några studier som anger så högt som 24 39 timmar).
Vi får inte alltid tillräckligt med B-vitaminer av vår kost så det är viktigt att
få i sig dem via exempelvis att kosttillskott.
Clicca Play per vedere la videoguida per Penalty Shootout: Multi League SPEEL VERANTWOORD: penaltyshootout.games opereert onafhankelijk en is niet gelieerd aan de websites die we aanbevelen. Zorg ervoor dat u aan alle wettelijke vereisten voldoet voordat u deelneemt aan gokactiviteiten. Houd er rekening mee dat onze inhoud alleen voor informatieve doeleinden is. Door op links te klikken, wordt u doorgestuurd naar externe sites, en wij aanvaarden geen verantwoordelijkheid voor mogelijke gevolgen. Prendendo come base questo sport e tutto l’entusiasmo che vi gira intorno, Evoplay presenta Penalty Shoot-Out, una slot machine incentrata sul calcio. Saranno riusciti a rendere onore alla passione di milioni di persone? __name_short_html__ Seguici su YouTube At present, Celtic are on their best ever run when it comes to taking penalties. They have won the past three shootouts; the 2020 Scottish Cup Final, 2024 Scottish Cup semi versus Aberdeen and, of course, the 2024 League Cup Final.
https://kasragostar.com/statistiche-dettagliate-della-slot-aviator-per-esperti/
Fortunatamente puoi farlo proprio qui sul nostro sito, sfogliando la nostra selezione di slot machine gratis senza scaricare e scegliendo i giochi casino gratis senza scaricare che ti incuriosiscono di più. In questa versione di Penalty Shoot Street, abbiamo mirato a migliorare assolutamente ogni aspetto della nostra precedente creazione. L’obiettivo rimane lo stesso: scegli una nazione, prendi parte a un rigore e devi sconfiggere il portiere avversario. Colpendo con successo la rete, l’importo del tuo incasso aumenta ! Da EvoPlay, ti permettiamo di ritirarti dal gioco in qualsiasi momento per riscuotere i tuoi profitti, o di completare tutti e 5 i tiri per cercare di vincere fino a 32 volte la tua scommessa. Con un motore di gioco avanzato e un gameplay avvincente, ti consigliamo di giocare subito al nostro gioco Penalty Shoot Out Street.
Have you ever thought about adding a little bit more than just your articles?
I mean, what you say is fundamental and all. Nevertheless imagine if you added some great pictures or video
clips to give your posts more, “pop”! Your
content is excellent but with images and videos, this site could definitely be one of the most beneficial in its field.
Awesome blog!
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: ремонт iphone на дому в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Клининг детских садов и школ с использованием гипоаллергенных средств
клининговая компания москва https://www.kliningovaya-kompaniya0.ru .
resume software engineer google cv engineer resume
Мир полон тайн https://phenoma.ru читайте статьи о малоизученных феноменах, которые ставят науку в тупик. Аномальные явления, редкие болезни, загадки космоса и сознания. Доступно, интересно, с научным подходом.
Читайте о необычном http://phenoma.ru научно-популярные статьи о феноменах, которые до сих пор не имеют однозначных объяснений. Психология, физика, биология, космос — самые интересные загадки в одном разделе.
Шаровая молния: учёные приблизились к разгадке природы редкого атмосферного явления
https://x.com/Fariz418740/status/1929998099038052497
I want looking at and I conceive this website got some really useful stuff on it! . CHECK ME OUT BY CLICKING MY NAME!!!
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: сервисный центр iphone в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: ремонт айфона в москве недорого
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
cizgi film
В случае прорыва трубы не забывайте зафиксировать происшествие актом с управляющей организацией https://expertiza-zaliva-kvartiry.ru/
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: сервисный центр iphone в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Ark Invests Cathie Wood Expresses Qualms About Etfs Beyond Btc And Eth
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: ремонт айфона с выездом мастера в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт кофемашин philips адреса, можете посмотреть на сайте: ремонт кофемашин philips в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Экспертиза поможет доказать, что повреждения вызваны именно заливом, а не старыми дефектами https://expertiza-zaliva-kvartiry.ru/
What Is A Token Understanding Crypto Tokens Types 2
Независимая экспертиза нужна не только для суда, но и для страховых выплат https://expertzaliva.ru/
5 Tips For Saving Money On Home Insurance In Atlanta
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали срочный ремонт кофемашин philips, можете посмотреть на сайте: ремонт кофемашин philips адреса
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
мод на тик ток 2025 Мир мобильных приложений не стоит на месте, и Тик Ток продолжает оставаться одной из самых популярных платформ для создания и обмена короткими видео. Но что, если стандартной функциональности вам недостаточно? На помощь приходит Тик Ток Мод – модифицированная версия приложения, открывающая доступ к расширенным возможностям и эксклюзивным функциям.
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт кофемашин philips рядом, можете посмотреть на сайте: ремонт кофемашин philips адреса
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
A Guide On Crypto Token Development By Naina
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали срочный ремонт кофемашин philips, можете посмотреть на сайте: ремонт кофемашин philips рядом
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: ремонт iphone на дому в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт кофемашин philips, можете посмотреть на сайте: ремонт кофемашин philips
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Прорвало трубу — первым делом перекрывайте воду и фотографируйте все последствия: экспертиза по заливу квартиры
How To Spot The Next Big Crypto 5 Strategies For
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: ремонт iphone вызвать мастера
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Free Cryptocurrency Videos Download 4k Hd
More Info
f1 casino
К 2030 году ваша жизнь изменится НАВСЕГДА: 7 технологий, которые уже здесь!
https://x.com/kiselev_igr/status/1930179397878751356
интернет https://beepbeepcasino.ru/vip
resume ai engineer https://resumes-engineers.com
3 Solana Token Gems To Invest In For Big Gains
Эй, друзья! Вчера вечером решил расслабиться и наткнулся на сайт, который просто взорвал мои фантазии! Страстные сцены, жаркие моменты — всё, что нужно для яркого настроения. Загляните сюда: Секс видео от первого — выбирайте что по душе и наслаждайтесь!
It’s an awesome paragraph for all the online users; they will obtain advantage from it I am sure.
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт кофемашин philips адреса, можете посмотреть на сайте: ремонт кофемашин philips рядом
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
What Is A Token Learn About Crypto And Defi Get 2
read what he said
milky way casino no deposit bonus
kra ссылка
Quick loan uk
Today, while I was at work, my sister stole my iPad and tested to see if it can survive a 30 foot drop, just so she
can be a youtube sensation. My apple ipad is now destroyed and she has
83 views. I know this is completely off topic but I had to share
it with someone!
Monero Flips Litecoin And Toncoin In Market Cap To
В Москве услуги по оценке залива оказываются как срочно, так и по предварительной записи: https://nezavisimaya-ocenka-zaliva.ru/
Valuable material Appreciate it!
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт кофемашин philips сервис, можете посмотреть на сайте: ремонт кофемашин philips рядом
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Wow lots of beneficial knowledge!
Cryptocurrency Market Today News Prices Ideas 4
В Москве можно найти эксперта по оценке ущерба, который оформит акт и поможет в суде https://nezavisimaya-ocenka-zaliva.ru/
кракен даркнет маркет
distinguished engineer resume resume for engineering internship
Can you be more specific about the content of your article? After reading it, I still have some doubts. Hope you can help me.
What Is A Token Learn About Crypto And Defi Get
porno cartoon vk
Все самое интересное про компьютеры, мобильные телефоны, программное обеспечение, софт и многое иное. Также актуальные обзоры всяких технических новинок ежедневно на нашем портале https://chto-s-kompom.ru/
ini situs bokep
Научно-популярный сайт https://phenoma.ru — малоизвестные факты, редкие феномены, тайны природы и сознания. Гипотезы, наблюдения и исследования — всё, что будоражит воображение и вдохновляет на поиски ответов.
97 5 Of New Bitcoin Investors Are At A Loss
Для получения компенсации за залив квартиры необходима официальная независимая оценка https://isk-za-zaliv.ru/
опубликовано здесь https://beepbeepcasino.ru/igry
You explained that terrifically.
дебетовая карта втб Ваш персональный консультант в мире банковских карт. Получение современной дебетовой карты стало простым и удобным с нашей помощью. Выберите карту, которая наилучшим образом соответствует вашим потребностям, и используйте все преимущества современного финансового сервиса. Что мы предлагаем? Ценные советы: Полезные лайфхаки и рекомендации для эффективного использования вашей карты. Актуальные акции: Будьте в курсе всех новых предложений и специальных условий от банков-партнеров. Преимущества нашего сообщества. Мы предоставляем полную информацию о различных типах карт, особенностях тарифов и комиссий. Наши публикации регулярно обновляются, предоставляя актуальные данные и свежие новости о продуктах российских банков. Присоединяйтесь к нашему сообществу, чтобы сделать ваши финансовые решения простыми, быстрыми и надежными. Вместе мы сможем оптимизировать использование банковских продуктов и сэкономить ваше время и средства. Наша цель — помогать вам эффективно управлять своими финансами и получать максимум выгоды от каждого взаимодействия с банком.
Your point of view caught my eye and was very interesting. Thanks. I have a question for you.
Самый духовный знак зодиака, который видит то, чего другие не замечают
https://x.com/Fariz418740/status/1930364626933256278
13 Years Ago Today Investor Sold 160 Bitcoins For 48 Cents At 0 0003
learn the facts here now
https://hottopcasino.com/online-casinos/good-day-4-play-casino/
you can check here
milky way casino no deposit bonus
На Луне найдены следы таинственной экспедиции – кто опередил человечество?
https://x.com/Fariz418740/status/1930382609898484135
подробнее здесь https://beepbeepcasino.ru/bezdepozitnyj-bonus
Ada Ecosystem Everything You Need To Know
опубликовано здесь https://marvilcasino.xyz/bonusy/
Crypto Prices Live Cryptocurrency Prices To Usd 4
Для возмещения ущерба от залива понадобится заключение независимого оценщика https://isk-za-zaliv.ru/
Научно-популярный сайт https://phenoma.ru — малоизвестные факты, редкие феномены, тайны природы и сознания. Гипотезы, наблюдения и исследования — всё, что будоражит воображение и вдохновляет на поиски ответов.
resumes for mechanical engineers resume frontend engineer
What To Know About Cryptocurrency Stablecoins As
You reported that adequately!
5 Best Crypto Investment Strategies Turn 1000 Into 10000
Quality articles or reviews is the secret to invite the people
to go to see the web page, that’s what this website is
providing.
Can we decipher the intricacies of the Web of Things, as demonstrated in the MEM 2009 mashup, to create a more seamless integration of everyday objects, or will this lead to an unforeseen digital spiderweb entangling our lives?
Топ-5 погрешностей, из-за которых проваливают ЕГЭ по литературе! Убедись, не выполняешь ли ты их. Подробности на сайте.
литературный сайт по литературе 2025 ЕГЭ видеокурсы по литературе
2022 Recap Heres How Chainlink Powered Bnb Chain Ethereum Polygon
Все самое интересное про компьютеры, мобильные телефоны, программное обеспечение, софт и многое иное. Также актуальные обзоры всяких технических новинок ежедневно на нашем портале https://chto-s-kompom.ru/
В одной из мусульманских стран запретили жертвоприношение животных
https://x.com/kiselev_igr/status/1930513315563774054
Bitcoin Price Analysis Btc Slips Below 107 5k On 3
дистанційна робота для дівчат Польща Стань вебкам моделью в польской студии, работающей в Варшаве! Открыты вакансии для девушек в Польше, особенно для тех, кто говорит по-русски. Ищешь способ заработать онлайн в Польше? Предлагаем подработку для девушек в Варшаве с возможностью работы в интернете, даже с проживанием. Рассматриваешь удаленную работу в Польше? Узнай, как стать вебкам моделью и сколько можно заработать. Работа для украинок в Варшаве и высокооплачиваемые возможности для девушек в Польше ждут тебя. Мы предлагаем легальную вебкам работу в Польше, онлайн работа без необходимости знания польского языка. Приглашаем девушек без опыта в Варшаве в нашу вебкам студию с обучением. Возможность заработка в интернете без вложений. Работа моделью онлайн в Польше — это шанс для тебя! Ищешь “praca dla dziewczyn online”, “praca webcam Polska”, “praca modelka online” или “zarabianie przez internet dla kobiet”? Наше “agencja webcam Warszawa” и “webcam studio Polska” предлагают “praca dla mlodych kobiet Warszawa” и “legalna praca online Polska”. Смотри “oferty pracy dla Ukrainek w Polsce” и “praca z domu dla dziewczyn”.
Are Shiba Inu And Dogecoin Are The New Whale Favorite Tokens In Town
Ethereum Price Today Eth To Usd Live Price
I like the valuable info you provide in your articles.
I will bookmark your blog and check again here regularly.
I’m quite certain I will learn many new stuff right here!
Good luck for the next!
dinimi binisi virin sitilir icin tikliyin mehdi binisi virin sikikler
What Is Cryptocurrency
Anavar is doubtless one of the few compounds I can confidently say is appropriate for newbies, intermediate, and advanced users. Females love this one; actually, Anavar is the most suited steroid a female might take, and I’ve seen countless numbers of ladies get a modern look while using it. One thing to learn about DHT is that it isn’t powerfully anabolic like testosterone is11. It is, nonetheless, far more androgenic, as its affinity for binding to the androgen receptor is double that of testosterone12.
This is a steroid that can be used for both bulking and chopping, but there’s no doubt that Tren Hex excels within the space of gaining mass and energy. With anabolic and androgenic ratings at 5 instances that of testosterone, it’s no surprise that Parabolan is a powerhouse for boosting energy and muscle gains. And with out the dreaded effects of water retention, the lean mass you placed on with this steroid is going to be top quality with out the bloating you get with many different bulking steroids. Like all types of Tren, excessive doses of Tren-Hex aren’t required due to the truth this is such a strong steroid (five times as powerful as testosterone). Tren Hex is great for bulking, power, and lean mass positive aspects however can also be highly effective for cutting and fat loss.
With the compound having a half-life of hours, you’ll have the ability to take it once day by day (usually within the morning) to make sure it’s all the time energetic in your body. Though trials on people have been run for 12 weeks, most athletes utilizing Cardarine will usually persist with an 8-week cycle at a dose of between 10mg and 15mg daily. The optimal cycle length for you have to be evaluated over time, and you might benefit by extending your cycle to 12 weeks, whereas the maximum dosage shouldn’t exceed 20mg for more advanced customers. In most circumstances, S23 customers will be stacking it with a minimal of certainly one of these different compounds. When it involves steroids, the ones that we will most intently compare with S23 are the powerhouse-https://ventiperquattro.it/pages/acquistare_winstrol_1.html of Anavar and Winstrol.
Ideally, a PCT cycle of a minimal of two weeks is required; in rarer instances, you would possibly need up to four to six weeks. Nolvadex is one of the best SERM for a SARM PCT, and 20mg day by day might be enough typically. Ostarine for eight weeks at 20mg daily, followed by Tamoxifen for weeks 9-12 at 20mg every day (dropped to 10mg for the ultimate week), makes it as simple as possible. The PCT portion will only be needed when you have testosterone suppression symptoms; in any other case, you will get away with no PCT on this cycle. Nolvadex or Clomid for 4 weeks at between 20-40mg daily starting at the end of your cycle, with the dose-dependent on how suppressed you’re feeling.
If we contemplate that you’ll have to pin it on an every-other-day foundation in equal doses, then you might wish to lay it off. The primary distinction between them is the time required for testosterone to kick in and their energetic lives. For a slower launch of testosterone, select Testosterone Cypionate or Enanthate. Be aware that you’ll need to attend up to 2 weeks to eliminate it out of your physique. Simply like hair loss, zits improvement on Masteron is individually dependent. This could be on the again, shoulders, chest, scalp, face, abdomen, arms – virtually anywhere in excessive cases. Cystic acne (pus-filled inflammatory acne) resulting in scars just isn’t exceptional amongst Masteron users, who are predisposed to this type of response from DHT steroids.
Your body is primed 24/7 to turn out to be a greater muscle building machine. However one of the best part is that you can use this even when you have no prior experience with legal steroids. The Ultimate Word Stack can be used for concurrently working towards a quantity of and mutually exclusive health objectives at the similar time.
Nonetheless, average features are possible, and some guys will see a pleasant 10 lbs of high quality lean muscle in a typical Primobolan cycle the place it’s the primary anabolic compound. Whatever features are made with Primo, men all the time notice they’re QUALITY positive aspects. You will need to be moderately lean already to get one of the best results out of Primo. Something above 15% body fat (men) won’t provide you with that spectacular hardness and definition around the shoulders as if you’re nice and lean earlier than going into the cycle. Far from probably the most potent muscle builder AAS, Primo nonetheless has its place in a lean bulking cycle, however your positive aspects will be slow and steady with Primobolan.
Masteron comes without water retention, so it supplies a robust addition to a slicing cycle where fats loss is desired and an general physique enhancement that suits the most severe customers. Pre-contest and chopping cycles are the place you’ll see the most effective results from Masteron and expertise what it does greatest. Masteron is certainly not a fat burner, and if you need to lose a good quantity of physique fats, you’ll need to do that with different compounds (and a top quality diet and coaching plan) earlier than profiting from Masteron.
Аренда яхты в Сочи для двоих — лучший формат приватного уикенда
яхта аренда сочи https://arenda-yahty-sochi23.ru/ .
Ежедневные публикации о самых важных и интересных событиях в мире и России. Только проверенная информация с различных отраслей https://aeternamemoria.ru/
giả dược bl
Howdy, i read your blog from time to time and
i own a similar one and i was just curious if you get a lot of spam feedback?
If so how do you stop it, any plugin or anything you can suggest?
I get so much lately it’s driving me mad so any support is very much appreciated.
Argentinas Largest Private Bank Banco Galicia Adds Bitcoin And Other Crypto Support On Their App
young cute porno
скачать песни уннв скачать песни уннв .
Other Ways To Say Its A Pity
Ежедневные публикации о самых важных и интересных событиях в мире и России. Только проверенная информация с различных отраслей https://aeternamemoria.ru/
After Doge Mention Is Burger King Now Making Its Own Crypto
Блог о здоровье, красоте, полезные советы на каждый день в быту и на даче https://lmoroshkina.ru/
готовые игровые компьютеры Игровые компьютеры на заказ: Индивидуальность и мощность Игровые компьютеры на заказ – это возможность создать уникальную машину, отражающую ваш стиль и предпочтения. Выберите корпус, систему охлаждения, подсветку и другие элементы, чтобы сделать ваш компьютер неповторимым.
Since implementing Funnels Forever, my online business has become incredibly streamlined, freeing up my time for other pursuits. I’m amazed at how advanced it is. Honestly, I’ve even been able to pursue new hobbies and interests outside of work.
Журнал для женщин и о женщинах. Все, что интересно нам, женщинам https://secrets-of-women.ru/
5 Things You Need To Know About Shiba Inu
песни уннв песни уннв .
How To Spot The Next Big Crypto 5 Strategies For 2
After France Hong Kong Now Intends To Regulate Defi
I all the time emailed this blog post page to all my contacts, as if
like to read it then my contacts will too.
Журнал для женщин и о женщинах. Все, что интересно нам, женщинам https://secrets-of-women.ru/
Cryptocurrency Prices Cryptocurrency List Market 3
Today S Top 100 Crypto Coins Prices And Data
подробнее vodkabet зеркало
стоматологические услуги во Владимире http://stomatologiya-vladimir-2.ru .
Tokenfi Price Today Token To Usd Live Price
сборка игрового компьютера
Bahis Siteleri 2025 listesiyle, 250 güvenilir bahis sitesinden deneme bonusu kazanın ve hemen kazanmaya başlayın seni öldüreceğiz mehdi sana başka uyarı yok adam ol
Блог о здоровье, красоте, полезные советы на каждый день в быту и на даче https://lmoroshkina.ru/
Очень советую https://ban24.ru/moskva/firm/avtokombinat-41-zao
Читать далее vodkabet
Предлагаем услуги профессиональных инженеров офицальной мастерской.
Еслли вы искали ремонт кофемашин philips в москве, можете посмотреть на сайте: ремонт кофемашин philips адреса
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Hi there I am so grateful Ifound your blog,
I really found you by error, while I was researching on Bing for something
else, Regardless I am here now and would just like to say thanks for a fantastic
post and a all round exciting blog (I also love the theme/design),
I don’t have time to read it all at the minnute but I have
saved it and also included your RSS feeds, so when I have time I will be back to read much more, Please do keep
up the great work.
Synonym Definition Examples And Importance In Language
Новости, обзоры, тест-драйвы, ремонт и эксплуатация автомобилей https://5go.ru/
ukraski porno
How To Spot The Next Big Crypto 5 Strategies For 2
Рекомендую https://nta-pfo.ru/news/society/2024/news_684468/
You actually make it seem so easy with your presentation but I find this matter to be really something that I think I
would never understand. It seems too complex and very broad for me.
I’m looking forward for your next post, I’ll try to
get the hang of it!
Are Investors Giving Up On Dogecoin Shiba Inu Amidst Major Drop
Solid breakdown. I found your site while researching why mass-hydro is a scam — glad I did.
this is a great post!
Журнал о психологии и отношениях, чувствах и эмоциях, здоровье и отдыхе. О том, что с нами происходит в жизни. Для тех, кто хочет понять себя и других https://inormal.ru/
Interesting read. It connects with what I just saw about why mass-hydro is a scam
on another forum.
Solid breakdown. I found your site while researching why mass-hydro is get a HLVD+ clone shipped to your home! scam — glad I did.
Дача и огород, фермерство и земледелие, растения и цветы. Все о доме, даче и загородной жизне. Мы публикуем различные мнения, статьи и видеоматериалы о даче, огороде https://sad-i-dom.com/
кликните сюда пинко сайт casino
789Club – Vùng đất của những kẻ săn kho báu! Không chỉ đơn thuần là cờ bạc, đây là cuộc phiêu lưu không hồi kết, nơi bạn có thể biến từng quân bài thành vàng bạc châu báu. Vào đây để khai mở vận may và đánh thức tài năng của chính mình!
перейдите на этот сайт pinco играть casino
сайт пинко казно
Дача и огород, фермерство и земледелие, растения и цветы. Все о доме, даче и загородной жизне. Мы публикуем различные мнения, статьи и видеоматериалы о даче, огороде https://sad-i-dom.com/
clomid generic can you get cheap clomid without insurance can i purchase clomiphene without rx clomiphene cost uk can i purchase clomid online order generic clomid without a prescription buy clomiphene no prescription
читать pinco зеркало на сегодня
You stated that really well.
Right now it sounds like Expression Engine is the top blogging platform out there right
now. (from what I’ve read) Is that what you are using on your blog?
You can play JetX in demo mode at 1Win Casino. This will allow you to get a feel for the game and how it works before you start betting with real money. Demo mode is a great way to learn the ropes and become familiar with the game without any risk. For example, to refill your balance in JetX with cryptocurrency, you need to follow these steps: At BC Game, players will be able to play JetX for real money. This game belongs to the type of instant games, which means that the results are determined immediately after the round is over. JetX has a high RTR of 97%, which means that winning real money is possible. The rules of the game are simple: the player needs to cash out his bet in time for the plane to fall. The higher it flies, the higher the odds. The essence of the game is in prediction and successful choice, which will bring a big profit.
https://cobyslab.mx/2025/06/03/configuring-rewards-in-lucky-jet-for-the-best-roi-a-1win-casino-review/
“BO55’s PAGCOR license and 256-bit encryption guarantee 100% safe transactions and data protection.” BO55 is an online platform where you can enjoy a wide collection of slot online. Think of it like a digital casino right at your fingertips! Getting started is easy – you easily register and access the site to explore various virtual slot games. BO55 often features popular and exciting slot games from leading providers like Slot Pragmatic and PG Slot. For those who want to get a feel for the games without any risk, BO55 might also offer a Slot Demo option, letting you try before you play for real. Lucky Neko (PG Soft): Featuring increasing multiplier symbols and a rewarding free spins feature with the potential for stacked wilds, Lucky Neko is often cited by players as having “gacor” potential, especially during bonus rounds.
интернет pinco официальный сайт
Журнал о психологии и отношениях, чувствах и эмоциях, здоровье и отдыхе. О том, что с нами происходит в жизни. Для тех, кто хочет понять себя и других https://inormal.ru/
Ежедневные актуальные новости про самые важные события в мире и России. Также публикация аналитических статей на тему общества, экономики, туризма и автопрома https://telemax-net.ru/
Aw, this was an extremely good post. Taking the time and actual effort to
create a very good article… but what can I say… I put things off a lot and don’t manage to get
nearly anything done.
Ежедневные актуальные новости про самые важные события в мире и России. Также публикация аналитических статей на тему общества, экономики, туризма и автопрома https://telemax-net.ru/
Проститутки Тюмень
¡Bienvenidos, apostadores !
ВїTe interesan los juegos con criptomonedas? En casino por fuera puedes apostar con Bitcoin, Ethereum o USDT sin problemas. п»їcasinos online fuera de espaГ±a. Es parte del futuro que ofrece casinoonlinefueradeespana.
Casinos online fuera de espaГ±a para jugar desde tablet y smartphone – п»їhttp://casinoonlinefueradeespana.xyz/
Las recargas mГnimas suelen ser mucho mГЎs bajas en casinos fuera de espaГ±a. Puedes jugar desde 5€ o menos en algunos casos. Ideal si solo quieres divertirte sin gastar mucho.
¡Que vivas recompensas extraordinarias !
Проститутки Тюмени
Новости, обзоры, тест-драйвы, ремонт и эксплуатация автомобилей https://5go.ru/
Spot on with this write-up, I honestly think this website needs
a lot more attention. I’ll probably be returning to see more, thanks for the information!
https://polatarung.club/
porno casero argentino
Проститутки Тюмени
купить диплом в рязани http://www.archive-diplomb.online .
купить диплом в ижевске купить диплом в ижевске .
You actually make it seem so easy with your presentation but I find this matter to be really something which I think I
would never understand. It seems too complex and extremely broad for me.
I’m looking forward for your next post, I’ll try to get the hang of it!
Проститутки Тюмень
reading this weblog’s post to be updated daily.
Проститутки Тюмень
Проститутки Тюмени
Heya i am for the primary time here. I found this board
and I in finding It really helpful & it helped me out a lot.
I am hoping to provide one thing again and aid others such as you aided me.
https://www.telix.pl/forums/users/ima75c3545617/
Проститутки Тюмени
Проститутки Тюмени
I always spent my half an hour to read this blog’s posts everyday along with a mug of coffee.
Проститутки Тюмень
Elles sont également un excellent moyen d’optimiser votre progression dans le jeu.
Проститутки Тюмени
Заказать диплом университета по невысокой цене возможно, обращаясь к проверенной специализированной компании. Мы предлагаем документы об окончании любых университетов РФ. Купить диплом университета– goldenfiber.ru/forum/?PAGE_NAME=profile_view&UID=52972
шкафы на стоянку авто шкафы на стоянку авто .
Почему отдых в Гаграх выбирают те, кто ценит чистоту, уют и природу
гагра жилье otdyh-gagry.ru .
For more information https://up-top.ru .
Проститутки Тюмень
mommy hd porno
Very good info. Lucky me I discovered your site by accident (stumbleupon). I’ve book marked it for later!
температура воды в хургаде в декабре
Нашел класный сайт с бесплатным порно rus-pornohub.com! Вот тут мое любимое порно: Инцест порно — куча крутого порно видно бесплатно!Советую!
BestGold: Сияние золота и блеск бриллиантов в Краснодаре В сердце Краснодарского края, где солнце ласкает поля и виноградники, расцветает мир изысканных ювелирных украшений BestGold. Мы предлагаем вам уникальную возможность прикоснуться к великолепию золота 70% пробы, воплощенному в утонченных кольцах и серьгах, сверкающих бриллиантами. Кольца, достойные королевы Наши кольца – это не просто украшения, это символ вашей индивидуальности и безупречного вкуса. От классических обручальных колец до экстравагантных коктейльных, каждое изделие BestGold создано с любовью и вниманием к деталям. Вставки из бриллиантов различной огранки и каратности подчеркнут вашу элегантность и добавят образу неповторимый шарм. купить серьги золото Серьги, подчеркивающие красоту Серьги BestGold – это идеальное дополнение к любому наряду. От лаконичных пусетов до эффектных подвесок, они призваны подчеркнуть вашу женственность и утонченность. Наши серьги с бриллиантами станут ярким акцентом вашего образа, притягивая восхищенные взгляды. Ювелирный фестиваль BestGold: праздник роскоши и стиля Не упустите возможность стать участником ювелирного фестиваля BestGold, где вас ждут эксклюзивные скидки на золото до 70% и невероятные предложения на бриллианты. Это ваш шанс приобрести ювелирные украшения мечты по самым выгодным ценам. BestGold: выбирайте лучшее, выбирайте золото! Погрузитесь в мир роскоши и блеска вместе с BestGold. Наши ювелирные украшения станут вашими верными спутниками, подчеркивая вашу красоту и элегантность в любой ситуации. Купите кольцо или серьги из золота в Краснодаре и ощутите себя королевой!
Индивидуалки Тюмени
It’s actually very difficult in this active life to listen news
on Television, thus I just use internet for that
reason, and get the newest news.
увв водопонижение http://stroitelnoe-vodoponizhenie6.ru .
Hi there, this weekend is nice in support of
me, for the reason that this time i am reading this impressive informative
piece of writing here at my home.
https://livedrawhk1.com/
ai therapist chat http://ai-therapist1.com/ .
I go to see each day a few blogs and sites to read content, however this weblog presents
quality based articles.
авто в аренду краснодар Аренда авто Краснодар аэропорт: Начните путешествие прямо с трапа самолета Услуга аренды авто в аэропорту Краснодара позволяет вам сразу после прилета сесть за руль и отправиться в нужном направлении. Это экономит время и делает ваше путешествие максимально комфортным.
водопонижение в москве http://www.stroitelnoe-vodoponizhenie6.ru .
Проститутки Тюмень
Проститутки Тюмени
Full hd film keyfini arkadaşlarınızla birlikte online yaşayın
hdfilm izle filmizlehd.co .
кайт блага Кайтсерфинг в Анапе – это не просто занятие спортом, это целая философия, в которой солнце, ветер и морские брызги играют главную роль. Анапа, с её обширными пляжами и предсказуемыми ветрами, стала излюбленным местом для кайтсерферов. Здесь можно увидеть как новичков, делающих первые шаги под присмотром опытных инструкторов, так и профессионалов, оттачивающих свои навыки в сложных трюках. Кайт-школа в Анапе – это место, где появляются новые звёзды кайтсерфинга. Школы предлагают разнообразные программы обучения для всех уровней подготовки, начиная с основ и заканчивая продвинутыми тренировками. Квалифицированные инструкторы, современное оборудование и индивидуальный подход обеспечивают быстрый прогресс и безопасность на воде. Кайт-школа в Анапе – это не только обучение кайтсерфингу, но и сообщество единомышленников, которых объединяет любовь к ветру и морю. Здесь можно завести новых друзей, получить полезные советы и просто хорошо провести время в компании людей, разделяющих ваши интересы. Кайтсерфинг в Анапе – это возможность убежать от повседневной рутины, ощутить свободу и испытать незабываемые впечатления. Представьте, как вы мчитесь по волнам, подгоняемые ветром, в то время как чайки кружат над вами, а солнце приятно согревает вашу кожу. Это не просто спорт, это приключение, которое останется в вашей памяти на всю жизнь. Кайтсерфинг в Благовещенской – это ещё одно популярное место для кайтсерфинга в Анапском районе. Здесь, на протяжённой косе, соединяющей Бугазский лиман и Чёрное море, созданы идеальные условия для катания. Неглубокая вода и устойчивый ветер делают Благовещенскую идеальным местом для обучения кайтсерфингу. Кайт Блага – это сокращённое название Благовещенской, которое часто используют кайтсерферы. Здесь есть несколько кайт-станций, предлагающих обучение, прокат оборудования и услуги по хранению. Кайтсерфинг в Анапе – это выбор тех, кто предпочитает активный отдых, любит ветер и море и готов принять новые вызовы. Присоединяйтесь к кайтсерферскому сообществу в Анапе и откройте для себя мир захватывающих приключений! DETIVETRA (ДЕТИ ВЕТРА) – это не просто название, это жизненная философия. Это те, кто чувствует ветер, не боится перемен и всегда открыт для новых впечатлений. Присоединяйтесь к ДЕТЯМ ВЕТРА и почувствуйте себя частью чего-то большего!
Индивидуалки Тюмени
Hello my friend! I wish to say that this post is awesome, great written and come with approximately all important infos.
I’d like to see more posts like this .
ai therapist bot http://ai-therapist1.com .
Visit Your URL jaxx liberty download
For more information https://tonersklad.ru .
טלגראס כיוונים|המדריך המלא להזמנת מוצרים באופן יעיל
בימים אלה, השימוש בטכנולוגיות מתקדמות נותן לנו את האפשרות להפוך תהליכים מורכבים לפשוטים משמעותית. אחד מהשירותים הפופולריים ביותר בתחום הקנאביס בישראל הוא מערכת הטלגראס , שמאפשר למשתמשים למצוא ולהזמין קנאביס בצורה נוחה ואמינה באמצעות הרשת החברתית טלגרם. בהדרכה זו נסביר על מה מדובר בשירות הזה, כיצד הוא עובד, וכיצד תוכלו להשתמש בו כדי לקבל את המוצר שאתם מחפשים.
מה זה טלגראס כיוונים?
טלגראס כיוונים הוא מרכז נתונים שמשמש כמרכז עבור משתמשי טלגראס (קבוצות וערוצים באפליקציה של טלגרם) המתמקדים בהזמנת ושילוח קנאביס. האתר מספק מידע עדכני לערוצים איכותיים ברחבי הארץ, המאפשרים למשתמשים להזמין קנאביס בצורה נוחה ומהירה.
ההבסיס לפעול מאחורי טלגראס כיוונים הוא לחבר בין משתמשים לספקי השירותים, תוך שימוש בכלי הטכנולוגיה של טלגרם. כל מה שאתם צריכים לעשות הוא לבחור ערוץ מתאים, ליצור קשר עם השליח הקרוב אליכם, ולבקש את המשלוח שלכם – הכל נעשה באופן דיגיטלי ומהיר.
איך работает טלגראס כיוונים?
השימוש בטulgראס כיוונים הוא מובנה בצורה אינטואיטיבית. הנה התהליך המפורט:
גישה למרכז המידע:
הכינו עבורכם את דף התמיכה עבור טלגראס כיוונים, שבו תוכלו למצוא את כל הקישורים המעודכנים לערוצים אמינים וטובים. האתר כולל גם מדריכים והסברים כיצד לפעול נכון.
הגעה לערוץ המומלץ:
האתר מספק רשימה של ערוצים מומלצים שעוברים בדיקת איכות. כל ערוץ אומת על ידי לקוחות קודמים ששיתפו את חוות דעתם, כך שתדעו שאתם נכנסים לערוץ בטוח ואמין.
בקשת שיחה עם מזמין:
לאחר בחירת הערוץ המתאים, תוכלו ליצור קשר עם האחראי על השילוח. השליח יקבל את ההזמנה שלכם וישלח לכם את המוצר תוך זמן קצר.
קבלת המשלוח:
אחת ההיתרונות העיקריים היא שהמשלוחים נעשים במהירות ובאופן מקצועני. השליחים עובדים בצורה מאובטחת כדי להבטיח שהמוצר יגיע אליכם בזמן.
מדוע זה שימושי?
השימוש בטulgראס כיוונים מציע מספר תכונות חשובות:
פשטות: אין צורך לצאת מהבית או לחפש ספקים באופן עצמאי. כל התהליך מתבצע דרך המערכת הדיגיטלית.
מהירות פעולה: הזמנת המשלוח נעשית תוך דקות, והשליח בדרך אליכם בתוך זמן קצר מאוד.
ביטחון: כל הערוצים באתר עוברות תהליך אימות על ידי לקוחות קודמים.
כל הארץ מכוסה: האתר מספק קישורים לערוצים מאומתים בכל אזורים בארץ, מהמרכז ועד הפריפריה.
למה כדאי לבדוק ערוצים?
אחד הדברים החיוניים ביותר בעת использование טulgראס כיוונים הוא לוודא שאתם נכנסים לערוצים שעברו בדיקה. ערוצים אלו עברו בדיקה קפדנית ונבדקו על ידי צרכנים שדיווחו על הביצועים והאיכות. זה מבטיח לכם:
חומרים ברמה גבוהה: השליחים והסוחרים בערוצים המאומתים מספקים מוצרים באיכות מותאמת לצרכים.
וודאות: השימוש בערוצים מאומתים מפחית את הסיכון להטעייה או לתשלום עבור מוצרים שאינם עומדים בתיאור.
תמיכה טובה: השליחים בערוצים המומלצים עובדים בצורה יעילה ומספקים שירות מדויק וטוב.
שאלת החוקיות
חשוב לציין כי השימוש בשירותים כמו טulgראס כיוונים אינו מאושר על ידי הרשויות. למרות זאת, רבים בוחרים להשתמש בשיטה זו בשל היעילות שהיא מספקת. אם אתם בוחרים להשתמש בשירותים אלו, חשוב לפעול בזהירות ולבחור ערוצים מאומתים בלבד.
סיכום: איך להתחיל?
אם אתם רוצים להזמין בצורה נוחה להשגת קנאביס בישראל, טulgראס כיוונים עשוי להיות הפתרון בשבילכם. האתר מספק את כל required details, כולל קישורים מעודכנים לערוצים מומלצים, מדריכים והסברים כיצד לפעול נכון. עם טulgראס כיוונים, שליח הקנאביס יכול להיות בדרך אליכם תוך דקות ספורות.
אל תחכו יותר – גשו לאתר המידע שלנו, מצאו את הערוץ המתאים לכם, ותוכלו להנות מחוויית קבלת השירות בקלות!
טלגראס כיוונים – המקום שבו הקנאביס מגיע עד לדלת ביתכם.
Проститутки Тюмени
go right here jaxx liberty
navigate to these guys jaxx wallet
Visit Website toast crypto wallet
have a peek here brd crypto
webpage jaxx
my explanation brd crypto
Continue toast wallet app
recommended you read brd wallet
Погружение в мир 1xbet-egypt.netlify.app, по спортивным событиям.
1xbet-egypt.netlify.app — ваш ключ к успеху, в мире игр.
Посетите 1xbet-egypt.netlify.app для невероятных бонусов, для.
1xbet-egypt.netlify.app — ваш игровой рай, где каждый сможет.
1xbet-egypt.netlify.app — ваш путеводитель в мире ставок, чтобы.
Вдохновляйтесь игрой на 1xbet-egypt.netlify.app, игра становится увлекательной.
Ставки на спорт на 1xbet-egypt.netlify.app, для.
1xbet-egypt.netlify.app — ваш лучший выбор, для того чтобы.
1xbet-egypt.netlify.app — время делать ставку, вы можете рассчитывать на удачу.
Откройте мир азартных игр на 1xbet-egypt.netlify.app, увлекательные игры.
1xbet-egypt.netlify.app — ваша удача начинается здесь, казино любит вас.
Заходите на 1xbet-egypt.netlify.app для невероятных акций, развлекаться легче.
Делайте ставки с умом на 1xbet-egypt.netlify.app, находить вдохновение.
Ваши возможности на 1xbet-egypt.netlify.app, куда.
Восторг от игры на 1xbet-egypt.netlify.app, где каждый шаг — это шанс.
Цените каждый момент на 1xbet-egypt.netlify.app, вместе с.
Откройте возможности на 1xbet-egypt.netlify.app, где.
Позвольте 1xbet-egypt.netlify.app удивить вас, где каждый может.
1xbet bonus 1xbet bonus .
This really hit home. Gerda Saunders’ story in The Memory Breath is both heartbreaking and incredibly powerful.
It’s rare to see such an honest, unfiltered look at dementia from someone living through it.
Her courage in sharing the emotional and practical realities of her journey is truly inspiring—and such an important reminder of the human side of
memory loss. Thank you for highlighting this!
Full Report toast wallet app
Самый лучший рейтинг порно сайтов!!!Я лично тут нашел те разделы секс видео которые мне нужны, возможно кому то будет полезно! https://gugla.org/ — нашел классное русское порно!
try these out toast wallet website
click for info toast wallet website
hop over to this site jaxx wallet download
https://stylestun.com/
read this post here jaxx
take a look at the site here brd wallet
get redirected here toast wallet
Прописка в столице дает больше возможностей, чем постоянное пребывание без регистрации https://propiska-moskva677.ru/
kra33cc – kraken зеркало рабочее, kraken онион
Need transportation? car shipping costs car transportation company services — from one car to large lots. Delivery to new owners, between cities. Safety, accuracy, licenses and experience over 10 years.
Thanks for finally talking about > Towards the Web of Things: Web Mashups for Embedded Devices @
MEM 2009 – Web of Things < Loved it!
kraken onion ссылка – kraken сайт зеркала, kraken актуальные ссылки
I don’t even know the way I stopped up right here, however I thought this put up was great.
I do not know who you might be however certainly you are going to a famous blogger should
you aren’t already. Cheers!
Без временной регистрации в Москве сложно устроиться на официальную работу и получить медицинскую помощь: купить прописку в москве
Шлюхи Тюмени
частная скорая наркологическая помощь частная скорая наркологическая помощь .
החליקו על לחיו, עוכבו על עצם הלחי החדה. ארטיום, מבלי להסיט את מבטו, רכן לעברה ושפתיהם גבו – “קדימה, עזור לי שוב.”סרגיי הנהן, תנועותיו הפכו כמעט מכניות. הוא לקח את הזין של אלכס – נערות ליווי בדרום
Excellent pieces. Keep posting such kind of information on your page.
Im really impressed by your site.
Hey there, You’ve performed a fantastic job. I will
definitely digg it and personally recommend to my friends.
I am sure they will be benefited from this site.
Thank.
kraken darknet – kraken ссылка зеркало, kra 33 at
Thank.
kra33 at – кракен ссылка, kraken войти
kraken onion зеркала – kraken актуальные ссылки, kraken актуальные ссылки
Продолжение https://forum.hpc.name/thread/a910/90502/arhitektura-klient-servernogo-vzaimodeystviya-v-unity-s-ispolzovaniem-patterna-komanda.html
Подробнее здесь https://forum.hpc.name/thread/f732/131656/kak-vybrat-igrovye-naushniki-sravnenie-hyperx-cloud-alpha-i-roccat-khan-pro.html
Тихий инсульт: можно перенести и не заметить — как его распознать по мелочам
https://x.com/kiselev_igr/status/1932311293702156519
להשקיע זמן בדירות דיסקרטיות. – חבלים – בדיחות שונות – צעצועי מין (בנות רבות מייחסות חשיבות עשו, אבל לא בעלי, הוא לעולם לא יסלח לי. היא הראתה לי מסך שעליו התפתלתי ונדפקתי באור שחור דירה דיסקרטית סקס
Легальная временная регистрация в Москве — это спокойствие, уверенность и соблюдение требований миграционного законодательства: как сделать временную регистрацию
опубликовано здесь https://forum.hpc.name/thread/b860/136555/kak-reshit-problemu-s-dublirovaniem-zvuka-s-dinamikov-na-mikrofon.html
Пропавшую 30-летнюю модель нашли обезглавленной https://x.com/MKids3447/status/1932363620098187543
этот сайт https://forum.hpc.name/thread/d350/103113/simulyaciya-processov-naneseniya-pokrytiya-v-labview-napylenie-cherez-maski.html
Сделать временную регистрацию в Москве можно через официальные каналы с внесением данных в государственный реестр https://registraceja-v-moskverus-1669.ru/
Шлюхи Тюмени
Перейти на сайт https://forum.hpc.name/thread/c982/118410/kak-zastavit-rabotat-vstroennuyu-i-diskretnuyu-videokarty-odnovremenno.html
vehicle transport auto carriers
Кому нельзя пить воду со льдом? – ПРЕДУПРЕЖДЕНИЕ
https://x.com/kiselev_igr/status/1932430254477283476
Подробнее https://forum.hpc.name/thread/t492/66264/kak-sozdat-zip-arhiv-iz-faylov-hranyashchihsya-v-kukah-s-pomoshchyu-php.html
Покупка подходящего диплома через качественную и надежную компанию дарит массу достоинств для покупателя. Заказать диплом о высшем образовании: ks4yumuo.listbb.ru/viewtopic.php?f=18&t=1691
посмотреть в этом разделе https://forum.hpc.name/thread/e840/135000/ustanovka-drayverov-dlya-audiokarty-realtek-alc883-na-osnove-intel-82801gb-ich7.html
Great read — really appreciate how clearly you explained things.
I’ve seen a lot of posts on this topic, but this one actually helped.
Bookmarked!
sda steam
Thank you for another informative web site. Where else may I am getting that kind of info written in such an ideal way?
I have a challenge that I am simply now operating on, and I have been on the glance
out for such information.
Thank.
https://authenticatorsteamdesktop.com/
ai therapist chat http://ai-therapist6.com/ .
mental health support chatbot http://www.mental-health1.com/ .
Balloons Dubai https://balloons-dubai1.com stunning balloon decorations for birthdays, weddings, baby showers, and corporate events. Custom designs, same-day delivery, premium quality.
read the article wallet jaxx
download steam desktop authenticator
หวยฮานอยวันนี้
Hi friends, how is all, and what you want to say about this article, in my view its actually
amazing in support of me.
шкафы в паркинг москва шкафы в паркинг москва .
ai therapy chatbot http://ai-therapist6.com .
mental health support chat https://mental-health1.com/ .
Где заказать диплом по необходимой специальности?
Заказать диплом института по выгодной стоимости возможно, обратившись к проверенной специализированной фирме.: ry-diplom.com
Назван популярный заменитель сахара, который может привести к инсульту
https://x.com/kiselev_igr/status/1932667355919761747
Что случается с мозгом после смерти: шокирующие факты, о которых вы не знали
https://x.com/kiselev_igr/status/1932685470699229478
¡Hola, jugadores !
Los usuarios de casinoporfuera.xyz recomiendan estas plataformas por su seguridad y transparencia.Los resultados de los juegos estГЎn auditados por entidades independientes.No hay conflictos de intereses con organismos nacionales.
El concepto de casino por fuera tambiГ©n se asocia con promociones sin requisitos de apuesta.
Juegos de azar en casinos online fuera de espaГ±a – https://www.casinoporfuera.xyz/#
¡Que disfrutes de conquistas memorables
https://sdasteam.com/
Как заказать алкоголь с доставкой и не ошибиться с выбором
заказать алкоголь на дом алкоголь с доставкой москва 24 .
Какие знаки зодиака встретят любовь в этом месяце
https://x.com/kiselev_igr/status/1932746537135738998
«Врата ада» постепенно закрываются спустя 54 года
https://x.com/kiselev_igr/status/1932788925770158137
Experimente o 1win Lucky Jet, um jogo de casino crash popular em Moçambique. Os jogadores locais jogam-no no computador e em dispositivos móveis. Vai adorar o design agradável desta diversão, a interface de fácil utilização e o enorme potencial de ganhos. Depois disso, o aplicativo começará o download, no qual você pode jogar o brincar luckyjet 1 win. Experimente o 1win Lucky Jet, um jogo de casino crash popular em Moçambique. Os jogadores locais jogam-no no computador e em dispositivos móveis. Vai adorar o design agradável desta diversão, a interface de fácil utilização e o enorme potencial de ganhos. Depois disso, o aplicativo começará o download, no qual você pode jogar o brincar luckyjet 1 win. Já é assinante? Faça login. Lucky Jet é um jogo emocionante que pode ser jogado online e oferece uma oportunidade de ganhar prêmios em dinheiro real. Para maximizar suas chances de ganhar e se divertir, é importante entender as regras e a mecânica do jogo, além de aprender algumas estratégias úteis. Neste contexto, forneceremos algumas dicas úteis tanto para iniciantes quanto para jogadores experientes que desejam melhorar suas habilidades no Lucky Jet e aumentar suas chances de sucesso. Aqui estão algumas dicas para iniciantes e jogadores profissionais no Lucky Jet.
https://nibrasmc.com/2025/06/05/sweet-bonanza-da-pragmatic-play-review-completo-para-jogadores-do-brasil/
Registe-se agora e aumente o seu depósito em 500% com o código promocional: SUPERJET 1. Registe-se através do link hackeado no Lucky Jet 1win: 2. Abra o GameLoop e procure por “Lucky jet Hack”, encontre Lucky jet Hack nos resultados da pesquisa e clique em “Install”. 2. Abra o GameLoop e procure por “Lucky jet Hack”, encontre Lucky jet Hack nos resultados da pesquisa e clique em “Install”. Para se registar num jogo a dinheiro Lucky jet 1win e começar a ganhar, com levantamentos. É necessário: Se você está procurando o 1win Lucky Jet hack apk, este jogo não é para você. Ele é lançado por um fornecedor licenciado e funciona estritamente de acordo com as especificações da máquina de caça-níqueis. Vamos entender como jogar Lucky Jet em 1Win com o passo a passo a seguir:
Советую http://www.kostromag.ru/forum/other/14567.aspx
https://dengi-vdolg.ru/
Предлагаю https://uteplimvse.ru/novosti/elegantnost-i-moshh-exeed-vx-v-sankt-peterburge.html
other Sollet wallet
Романтика и дружба ждут вас на нашем сайте знакомств, где собраны анкеты ярких девушек из Питера, вы можете найти свою идеальную пару и стать частью новой дружеской или романтической истории, позвольте им расчистить путь к вашему счастью https://spb-night.com/
Ученые определили регионы, где чаще всего встречается деменция
https://x.com/Fariz418740/status/1932910408651755823
Find Out More Sollet.io
xX3iMP8xY4S
advice Sol wallet
888starz отзывы https://888starz-official.com .
Thank.
click over here Solana wallet
https://dengi-vdolg.ru/
co88.org không đảm bảo quyền lợi người chơi, dễ bị khóa tài khoản vô cớ
look at these guys Sollet io
wonderful issues altogether, you simply received a brand new reader.
What could you suggest about your publish that you just made some days in the past?
Any sure?
Very good info. Lucky me I ran across your blog
by accident (stumbleupon). I’ve book marked it for later!
co88.org giao diện web lỗi liên tục, rất khó để đặt cược hay chơi game
visit our website jaxx liberty
Сорока: Ворует блестящее — это миф. Что на самом деле крадёт пернатая клептоманка
https://x.com/kiselev_igr/status/1933045933417140513
svt-stroy.ru – Все о стройке и ремонте.
Разбираем подробно – Как обновить интерьер без большого ремонта в нашем строительном блоге.
Советы опытных специалистов, дизайнеров и инженеров! Ремонтируйте свой загородный дом с умом!
888starz официальный сайт скачать 888starz-official.com .
70918248
References:
anabolic steroids before and after pictures – https://sunatman.com/revolutionize-your-business-with-our-cutting-edge/ –
see page Best solana wallet
kiralık Bahis Sitesi Adminlik Kiralama
More Help jaxx wallet
other Sollet io
film izle
Баку в Азербайджане – идеальное место для жизни: рейтинг топ-4 стран от российского тревел-блогера
https://x.com/kiselev_igr/status/1933125321907208219
websites jaxx liberty
https://semaglupharm.com/# SemagluPharm
Популярный напиток назван природным спасителем печени
https://x.com/kiselev_igr/status/1933151530749710465
Профессиональное косметологическое оборудование купить в москве для салонов красоты, клиник и частных мастеров. Аппараты для чистки, омоложения, лазерной эпиляции, лифтинга и ухода за кожей.
kult film seyret
Нашел огонь-сайт с бесплатным порно pornorus.net! Вот тут мое любимое порно: тут русское порно — тонна классного видео бесплатно! Рекомендую заглянуть! ??
svt-stroy.ru – Все о стройке и ремонте.
Разбираем подробно – Как обыграть или скрыть вентиляционный короб на кухне в нашем строительном блоге.
Советы опытных специалистов, дизайнеров и инженеров! Ремонтируйте свой загородный дом с умом!
kult filmler izle
шкаф в паркинг с рольставнями цена шкаф в паркинг с рольставнями цена .
web link Sollet wallet
have a peek here Sollet wallet
official statement Sollet
this hyperlink Sollet wallet
Нашел огонь-сайт с бесплатным порно pornorus.net! Вот тут мое любимое порно: тут русское порно — тонна классного видео бесплатно! Рекомендую заглянуть! ??
explanation Solet.io
Excellent post. Keep posting such kind of information on your blog. Im really impressed by it.
find Sollet.io
Автор статьи предоставляет подробное описание событий и дополняет его различными источниками.
home Best solana wallet
hop over to here Sollet wallet
ultimate AI porn maker generator. Create hentai art, porn comics, and NSFW with the best AI porn maker online. Start generating AI porn now!
Автор статьи предоставляет информацию с разных сторон, представляя факты и аргументы.
co88.org không có phản hồi nhanh khi gặp sự cố tài khoản
Сервисный центр предлагает ремонт фотовспышек sigma на дому отремонтировать фотовспышки sigma
Автор представляет важные факты и обстоятельства, сопровождая их объективным анализом.
Статья содержит подробное описание событий и контекста, при этом не выражая пристрастие к какой-либо стороне.
Я не могу не отметить качество исследования, представленного в этой статье. Она обогатила мои знания и вдохновила меня на дальнейшее изучение темы. Благодарю автора за его ценный вклад!
en iyisini izle
tesekkurler efendim
An impressive share! I have just forwarded this onto a co-worker who has been conducting a little research on this.
And he in fact ordered me breakfast simply because I found it for him…
lol. So allow me to reword this…. Thank YOU for the meal!!
But yeah, thanks for spending some time to discuss this matter here on your internet site.
birden fazla film izle
3 bin gros ton
¡Saludos, aventureros de la fortuna !
La seguridad y la variedad de juegos son claves en los mejores casinos online extranjeros.
Lista completa de mejores casinos online extranjeros – п»їhttps://casinos-extranjeros.es/
Los casinos online extranjeros ofrecen juegos con dealers que hablan tu idioma, incluyendo espaГ±ol latino o castellano. Esto mejora la conexiГіn con el juego. Sentirse en casa es posible.
¡Que disfrutes de increíbles oportunidades irrepetibles !
Thank.
get more https://web-foxwallet.com
browse around here https://web-foxwallet.com
click here for more https://web-foxwallet.com
this link https://web-foxwallet.com
visit site https://web-foxwallet.com/
best site https://web-foxwallet.com/
This Site https://web-foxwallet.com/
kult izle
article https://web-foxwallet.com
Extra resources https://web-foxwallet.com
en iyisi mi bilmiyorum
you’re in point of fact a excellent webmaster. The web
site loading pace is incredible. It sort of feels that you’re
doing any unique trick. Also, The contents are masterwork.
you’ve done a great job on this matter!
check out this site https://web-foxwallet.com/
why not check here https://web-foxwallet.com
Find Out More https://web-foxwallet.com
Admiring the dedication you put into your site and in depth information you provide.
It’s nice to come across a blog every once in a while
that isn’t the same old rehashed material. Fantastic read!
I’ve bookmarked your site and I’m including your RSS feeds to my Google account.
why not try this out https://web-foxwallet.com
септик под ключ стоимость московская область цена https://septik-pod-klyuch-1.ru/ .
link https://web-foxwallet.com/
Good article, thanks!
try this site https://web-foxwallet.com/
asit
kiralık Bahis Sitesi Adminlik Kiralama
nasilsiniz dostlar
cizgi film sitesi
Thank.
In many situations, this is the same as considering all partial derivatives simultaneously.
Что лучше выбрать при заказе диплома — университет или техникум, чтобы меньше вопросов? см. подробнее
В 2025 году наличие диплома всё ещё остаётся основным фактором при приёме на работу, повышении по службе или получении лицензии. И если у вас нет нужного документа — это не повод терять время на долгие годы учебы.
✅ Выход есть — покупка диплома, полностью соответствующего оригиналу:
С печатями, подписями, голограммами,
С занесением в архив (по запросу),
Любой ВУЗ, колледж — по всей России и СНГ.
Для кого подойдёт?
Вас отчислили, но обучение практически завершено?
Поступили на хорошую работу, но нет “корочки”?
Нужен диплом для лицензирования, повышения, тендера?
Мы работаем без предоплаты (по договору или поэтапно) и гарантируем полную конфиденциальность. У нас нет шаблонов — каждый документ готовится индивидуально, с учётом всех нюансов.
Наши гарантии:
Реалистичный диплом, неотличимый от оригинала
Настоящие данные выпускника (по вашей анкете)
Быстрая доставка по России и СНГ
Юридически грамотно оформленный договор (по желанию)
Мы сотрудничаем с квалифицированными специалистами, которые знают, как должен выглядеть официальный документ — вплоть до мельчайших деталей. У нас много лет опыта и более random00..3999] довольных клиентов.
?? У кого в дипломе хоть раз была правда?
Серьезно: вы когда-нибудь смотрели свой диплом и думали — “да, всё, что здесь написано, я действительно знаю и умею”?
У многих — только сертификат. Корочка, глянцевая, с гербом и подписями, которую HR пролистывает за 1,5 секунды. А потом начинается: опыт, кейсы, компетенции, “что умеешь по факту?”. Диплом где-то там, в глубокой папке.
Но реалия в том, что без диплома тебе даже не дадут шанс показать, что ты умеешь.
Ты можешь быть крутым специалистом, уметь в IT, дизайн, управление, логистику — но без документа с золотым тиснением в кабинет не пустят.
?? Нормально ли это? Нет. Реальность ли это? Да.
Вот потому и появляются услуги, которые говорят:
“Не хочешь тратить 5 лет ради корочки? Мы решим вопрос. Тебе нужен не вуз — тебе нужен диплом.”
Ты его получаешь, кладёшь в резюме, и дальше всё зависит от твоих мозгов, а не от шрифта на бумаге.
Кто-то скажет: “Это обман!”
А кто-то — “Это адаптация к системе, которая обманывает тебя с детства”.
?? И что в итоге?
Диплом становится не подтверждением знаний, а входным билетом. Как QR-код в метро — проверили, что есть, и пропустили.
Поэтому люди и покупают.
Не потому что глупые. А потому что взрослые, занятые, уставшие от лишнего.
Потому что хотят не учиться “ради процесса”, а работать по делу.
?? Ирония в том, что большинство таких дипломов — работают.
Даже если ты их не учил — ты знаешь, как применить. А вот “настоящие выпускники” потом всё равно идут на курсы и стажировки, потому что ничего не помнят.
И что важнее: корочка или то, как ты справляешься с задачей?
?? У кого были такие мысли — пишите. У кого был опыт — делитесь.
Где быстро оформить диплом без РїРѕС…РѕРґРѕРІ РїРѕ инстанциям? Рсточник
Кто-РЅРёР±СѓРґСЊ покупал диплом СЃ отметкой РѕР± аккредитации Р’РЈР—Р°? Рто важно для устройства? Посмотреть
В 2025 году наличие диплома всё ещё остаётся ключевым фактором при приёме на работу, повышении по карьерной лестнице или получении лицензии. И если у вас нет нужного документа — это не повод терять годы.
✅ Решение есть — заказ диплома, полностью соответствующего оригиналу:
С печатями, подписями, голограммами,
С занесением в архив (по запросу),
Любой ВУЗ, колледж — по всей России и СНГ.
Кому может пригодиться?
Вас отчислили, но обучение практически завершено?
Поступили на хорошую работу, но нет диплома?
Нужен диплом для лицензирования, повышения, тендера?
Мы работаем без предоплаты (по договору или поэтапно) и гарантируем полную конфиденциальность. У нас нет шаблонов — каждый документ готовится индивидуально, с учётом всех нюансов.
Что вы получаете:
Диплом, неотличимый от оригинала
Настоящие данные выпускника (по вашей анкете)
Быстрая и надежная доставка по России и СНГ
Юридически грамотно оформленный договор (по желанию)
Мы сотрудничаем с квалифицированными специалистами, которые понимают, как должен выглядеть официальный документ — вплоть до мельчайших деталей. У нас много лет опыта и более random00..3999] довольных клиентов.
Hi everybody, here every person is sharing these kinds of knowledge, thus it’s good to
read this blog, and I used to pay a quick visit this webpage every day.
?? У кого в дипломе хоть раз была правда?
Серьезно: вы когда-нибудь смотрели свой диплом и думали — “да, всё, что здесь написано, я действительно знаю и умею”?
У многих — только бумажка. Корочка, глянцевая, с гербом и подписями, которую HR смотрит за 1,5 секунды. А потом начинается: опыт, кейсы, компетенции, “что умеешь по факту?”. Диплом где-то там, в глубокой папке.
Но реалия в том, что без диплома тебе даже не дадут шанс доказать, что ты умеешь.
Ты можешь быть крутым специалистом, уметь в IT, дизайн, управление, логистику — но без документа с золотым тиснением не попадешь на собеседование.
?? Нормально ли это? Нет. Реальность ли это? Да.
Вот потому и появляются сервисы, которые дают предложение:
“Не хочешь тратить 5 лет ради корочки? Мы решим вопрос. Тебе нужен не вуз — тебе нужен диплом.”
Ты его получаешь, кладёшь в резюме, и дальше всё зависит от твоих мозгов, а не от шрифта на бумаге.
Кто-то скажет: “Это обман!”
А кто-то — “Это адаптация к системе, которая обманывает тебя с детства”.
?? И что в итоге?
Диплом становится не подтверждением знаний, а входным билетом. Как QR-код в метро — проверили, что есть, и пропустили.
Поэтому люди и покупают.
Не потому что глупые. А потому что взрослые, занятые, уставшие от лишнего.
Потому что хотят не учиться “ради процесса”, а работать по делу.
?? Ирония в том, что большинство таких дипломов — работают.
Даже если ты их не учил — ты знаешь, как применить. А вот “настоящие выпускники” потом всё равно идут на курсы и стажировки, потому что ничего не помнят.
И что важнее: корочка или то, как ты справляешься с задачей?
?? У кого были такие мысли — пишите. У кого был опыт — делитесь.
Какой диплом лучше заказывать — бакалавра или специалиста? Купить готовый диплом
description coinbase login
click for info https://topvitality.space/
content https://vitalityshop.space/
advice https://vitalityshop.space/
continue reading this https://topvitality.space
look what i found https://vitalsphere.space/
Заказать диплом университета по выгодной цене возможно, обратившись к проверенной специализированной компании. Приобрести диплом: privamaxsecurity.co.ke/employer/diplomy-grup-24
Look At This https://topvitality.space
click here for more info coinbase login
Look At This coinbsae wallet login
her response https://vitalityshop.space
over at this website https://vitalityshop.space/
his explanation coinbase login
browse around this site https://topvitality.space
check these guys out https://topvitality.space
Full Report https://topvitality.space
Продолжение Игровые движки
blog coinbase login
Главная Разработка игр
Thank.
займ онлайн на 30 дней займы онлайн на карту по паспорту
recommended you read coinbase login
browse this site coinbase login
read the full info here coinbase exchange
read this post here https://vitalsphere.space
visit our website coinbase exchange
look at here coinbase login
look at this web-site https://vitalityshop.space/
like this https://topvitality.space
страница Программирование игр
¡Saludos, cazadores de suerte !
Casinos sin licencia con retiro inmediato garantizado – http://www.casinossinlicenciaenespana.es/ casinos online sin licencia
¡Que vivas triunfos extraordinarios !
Check This Out coinbase login
¡Hola, cazadores de tesoros!
Casino online extranjero sin registro ni comprobantes – https://www.casinoextranjerosespana.es/ casino online extranjero
¡Que disfrutes de asombrosas movidas brillantes !
I really like what you guys tend to be up too. This sort of clever work and coverage!
Keep up the fantastic works guys I’ve added you guys to my
personal blogroll.
wewewe wowuwu wewew wiwewew en güncel listesi burada. Güvenilir bahis siteleri ve en cazip deneme bonusu fırsatlarıyla kazancınızı artırın
her comment is here https://kingprotocol.lat/
¡Saludos, exploradores de la suerte !
Casino online extranjero con sistema de lealtad – https://www.casinosextranjerosenespana.es/ п»їcasinos online extranjeros
¡Que vivas increíbles giros exitosos !
Hi! I’ve been following your website for some time now and finally got the bravery to
go ahead and give you a shout out from Humble Tx!
Just wanted to mention keep up the great work!
https://WWW.Sitiosperuanos.com/author/jeffereytea/
visit the website https://nucleusearn.cc
Improve your indoor air quality in Dubai with reliable AC duct cleaning done by certified technicians: ac condenser cleaning cost
kiralık Bahis Sitesi Adminlik Kiralama
Я нашел эту статью чрезвычайно познавательной и вдохновляющей. Автор обладает уникальной способностью объединять различные идеи и концепции, что делает его работу по-настоящему ценной и полезной.
My spouse and I absolutely love your blog and find most
of your post’s to be just what I’m looking for.
Would you offer guest writers to write content
for you? I wouldn’t mind creating a post or elaborating on a
number of the subjects you write with regards to here.
Again, awesome site!
https://w3.hk6d.blog/
This is my first time go to see at here and i am really pleassant to read all at alone place.
casino con bono sin deposito
have a peek at these guys https://verio.buzz/
news https://pactswap.cc
Dusty AC ducts can impact your energy bill — our Dubai cleaning services help you save: ac vent cleaning cost
Our site https://kingprotocol.biz
look what i found https://agents-land.org/
find this https://universalx.buzz/
this https://gofundmeme.buzz
why not try here https://asterdex.cc/
Homepage https://machfi.org/
Умные рулонные шторы для вашего дома, в каждом доме.
Современные рулонные шторы с электрическим управлением, максимальный комфорт.
Рулонные шторы с электроприводом: удобство и стиль, в нашем интернет-магазине.
Современные рулонные шторы с электроприводом, качества и стиля.
Время менять окна на рулонные шторы с электроприводом, смотрите.
Электрические рулонные шторы – удобство и стиль, добавят стиля.
Стильные рулонные шторы с электроприводом, инновации, которые стоит попробовать.
Умные рулонные шторы – ваш новый помощник, узнайте больше.
Сделайте свой дом умнее с рулонными шторами, в каталоге товаров.
Рулонные шторы с электроприводом для современного интерьера, для вашего комфорта.
Преобразите ваш дом с рулонными шторами с электроприводом, предлагаемые с доставкой.
Электрические рулонные шторы для любого интерьера, выбор, который вы не пожалеете.
Умные рулонные шторы для современного дома, в вашем доме.
Обновите интерьер с рулонными шторами с электроприводом, закажите сейчас.
Рулонные шторы с электроприводом: комфорт на новом уровне, сделайте свой дом комфортнее.
Электрические рулонные шторы – сочетание простоты и стиля, позаботьтесь о себе.
Рулонные шторы с электроприводом для вашего комфорта, заказывайте онлайн.
Электроприводные рулонные шторы для стильного дома, узнайте больше.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
I blog quite often and I seriously appreciate your content.
The article has really peaked my interest.
I’m going to book mark your site and keep checking for
new information about once a week. I subscribed to your RSS feed
as well.
¡Hola, fanáticos del riesgo !
Casino online sin licencia y alta usabilidad – http://www.casinossinlicenciaespana.es/ mejores casinos sin licencia en espaГ±a
¡Que experimentes conquistas extraordinarias !
a fantastic read https://gofundmeme.buzz/
Сирийский врач, пытавший людей, приговорен к пожизненному заключению немецким судом
https://x.com/kiselev_igr/status/1934861946425131280
my web-site best real estate agent in Rancho Cucamonga CA russian-garmon.ru t3-assets robots ?melbet_promokod_na_segodnya_bonus_do_19_500_rub.html Download apk file BC mostbet – win right now! Aw, this was a very nice post. In thought I want to put in writing like this moreover – taking time and precise effort to make an excellent article… but what can I say… I procrastinate alot and by no means appear to get something done. Visit my web site – Highstakes sweeps download Download apk file BC mostbet – win right now! Aw, this was a very nice post. In thought I want to put in writing like this moreover – taking time and precise effort to make an excellent article… but what can I say… I procrastinate alot and by no means appear to get something done. Kazinosunda Pin-Up Aviator yuvası xüsusi bölmədə yerləşdirilib. Əsas Pin-Up səhifəsini açdığınız vaxt seçməlisiniz aviator game yuxarı üfüqi idarəetmə panelindəNişan qırmızı rənglə vurğulanır. Nişanı kliklədiyiniz zaman aviator oyunu iki rejimdə pulsuz və praktik para.
https://www.fundable.com/mystikal-barela
Szanse na wygraną w Aviatorze Betano są spójne przez cały dzień. Apgyvendinimo įstaigos Aviator Modern 83 kainos gali skirtis priklausomai nuo viešnagės datų, viešbučio nuostatų ir kitų aplinkybių. Įveskite datas norėdami peržiūrėti kainas. Możesz grać w różnych kasynach online, takich jak Betano, KTOI Estrela Betoraz w najlepszych kasynach online na świecie. «Aviator» w MostBet ma proste i nieskomplikowane zasady. Aby z powodzeniem grać w ten slot: KAYAK to wyszukiwarka ofert turystycznych. Stale przeszukujemy setki stron, żeby znaleźć najlepsze oferty dla osób korzystających z naszego serwisu. Przetwarzamy ponad 2 miliardy wyszukiwań lotów rocznie, co pozwala nam wyświetlić szereg cen i opcji lotów wszystkich linii, w tym Grant Aviation. Stale informuję o wydarzeniach w kasynach stacjonarnych i przez internet, wybierając najkorzystniejsze rozrywki i kasyna.
sitemap1
navigate to this web-site https://exponent.bond/
visit their website https://agents-land.org
Extra resources https://tophat.space/
Электрические рулонные шторы, в каждом доме.
Современные рулонные шторы с электрическим управлением, для вашего интерьера.
Рулонные шторы с электроприводом: удобство и стиль, в нашем интернет-магазине.
Современные рулонные шторы с электроприводом, комфорта и эстетики.
Наслаждайтесь комфортом рулонных штор с электроприводом, ознакомьтесь.
Рулонные шторы с электроприводом для вашего интерьера, создадут уют.
Электроприводные рулонные шторы: инновации в вашем доме, решение для современного дизайна.
Рулонные шторы с электроприводом для легкого управления, узнайте больше.
Сделайте свой дом умнее с рулонными шторами, в нашем интернет-магазине.
Рулонные шторы с электроприводом для современного интерьера, которое вы заслуживаете.
Электрические рулонные шторы – стиль и технология, предлагаемые с доставкой.
Умные рулонные шторы – правильно решайте, выбор, на который стоит обратить внимание.
Электроприводные рулонные шторы: удобство управления одним нажатием, носим с собой.
Электрические рулонные шторы для стиля и комфорта, закажите сейчас.
Умные рулонные шторы для вашего удобства, откройте для себя.
Рулонные шторы с электроприводом – вашим окнам это нужно, позаботьтесь о себе.
Умные рулонные шторы – ваш идеальный выбор, выбирайте лучшее.
Электроприводные рулонные шторы для стильного дома, изучите сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Сомневаетесь в своих правах? Наша бесплатная консультация юристов по телефону поможет вам. Разъясним сложные моменты законодательства и подскажем, как действовать дальше: бесплатная юридическая консультация по телефону
Visit This Link https://upshift.cfd
Пиратские сокровища – 5 крупнейших кладов в истории
https://x.com/kiselev_igr/status/1934952832429330693
Возникли проблемы с законом? Не откладывайте решение. Квалифицированные юристы окажут бесплатную первичную консультацию. Проанализируем вашу ситуацию и предложим варианты действий – телефон юриста
Müşterilerinize casino ve slot alanında
Рулонные шторы с электроприводом, в каждом доме.
Выберите рулонные шторы с электроприводом, легкость управления.
Умные шторы: удобство на кончиках пальцев, доступны.
Электроприводные рулонные шторы, функциональности и дизайна.
Время менять окна на рулонные шторы с электроприводом, смотрите.
Электрические рулонные шторы – удобство и стиль, добавят стиля.
Электрические рулонные шторы: комфорт и уют, выбор, который стоит сделать.
Умные рулонные шторы – ваш новый помощник, познакомьтесь с нашими предложениями.
Сделайте свой дом умнее с рулонными шторами, в каталоге товаров.
Электрические рулонные шторы: удобство на каждом окне, которое вам понравится.
Современные рулонные шторы с электроприводом, с возможностью установки.
Умные рулонные шторы – правильно решайте, выбор, на который стоит обратить внимание.
Рулонные шторы с электроприводом – ваш идеальный помощник, носим с собой.
Умные рулонные шторы: будущее уже здесь, закажите сейчас.
Электрические рулонные шторы – стильный выбор, сделайте свой дом комфортнее.
Умные рулонные шторы с электроприводом для вашего дома, пополните свой интерьер.
Электрические рулонные шторы: легкость управления, покупайте у нас.
Электроприводные рулонные шторы для стильного дома, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Рулонные шторы с электроприводом, в интерьере.
Выберите рулонные шторы с электроприводом, интеллектуальное решение.
Рулонные шторы с электроприводом: удобство и стиль, в наличии.
Современные рулонные шторы с электроприводом, превосходное сочетание.
Изучите мир электрических рулонных штор, ознакомьтесь.
Рулонные шторы с электроприводом для вашего интерьера, подходят для любого окна.
Электрические рулонные шторы: комфорт и уют, решение для современного дизайна.
Электрические рулонные шторы: свобода выбора, узнайте больше.
Сделайте свой дом умнее с рулонными шторами, на нашем сайте.
Электрические рулонные шторы: удобство на каждом окне, для вашего комфорта.
Электрические рулонные шторы – стиль и технология, доступные для заказа.
Рулонные шторы с электроприводом: функциональность и стиль, выбор, на который стоит обратить внимание.
Рулонные шторы с электроприводом – ваш идеальный помощник, в вашем доме.
Электрические рулонные шторы для стиля и комфорта, выберите свои.
Электрические рулонные шторы – стильный выбор, сделайте свой дом комфортнее.
Умные рулонные шторы с электроприводом для вашего дома, не упустите свой шанс.
Электрические рулонные шторы: легкость управления, заказывайте онлайн.
Электроприводные рулонные шторы для стильного дома, изучите сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
ads Reklam vermek
¡Hola, maestros del juego !
Casino fuera de EspaГ±a con pagos en 24 horas – https://www.casinoonlinefueradeespanol.xyz/ casino online fuera de espaГ±a
¡Que disfrutes de asombrosas movidas brillantes !
I visited many websites but the audio feature for audio songs
current at this web site is really marvelous.
Look at my page: Packaging Machinery
ads Reklam vermek
click now https://deq.lat/
her explanation https://pactswap.org
Электрические рулонные шторы, комфорт и элегантность.
Современные рулонные шторы с электрическим управлением, для современного дома.
Умные шторы: удобство на кончиках пальцев, доступны.
Электроприводные рулонные шторы, превосходное сочетание.
Наслаждайтесь комфортом рулонных штор с электроприводом, ознакомьтесь.
Рулонные шторы с электроприводом для вашего интерьера, подходят для любого окна.
Электрические рулонные шторы: комфорт и уют, решение для современного дизайна.
Рулонные шторы с электроприводом для легкого управления, узнайте больше.
Электроприводные рулонные шторы: ваш лучший выбор, в каталоге товаров.
Электрические рулонные шторы: удобство на каждом окне, которое вы заслуживаете.
Преобразите ваш дом с рулонными шторами с электроприводом, доступные для заказа.
Умные рулонные шторы – правильно решайте, выбор, который изменит ваш быт.
Рулонные шторы с электроприводом – ваш идеальный помощник, в вашем доме.
Электрические рулонные шторы для стиля и комфорта, выберите свои.
Умные рулонные шторы для вашего удобства, сделайте свой дом комфортнее.
Умные рулонные шторы с электроприводом для вашего дома, пополните свой интерьер.
Электрические рулонные шторы: легкость управления, выбирайте лучшее.
Преимущества рулонных штор с электроприводом, изучите сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
site here https://tophat.space
Hey there! I just would like to offer you a big thumbs
up for the great information you’ve got here on this post.
I’ll be returning to your site for more soon.
look what i found https://universalx.lat
¡Saludos, fanáticos del azar !
Top promociones en casinos online extranjeros 2025 – https://www.casinoextranjerosenespana.es/# casino online extranjero
¡Que disfrutes de triunfos épicos !
Электрические рулонные шторы, инновации и дизайн.
Электроприводные рулонные шторы для вашего окна, для вашего удобства.
Рулонные шторы с электроприводом: удобство и стиль, в наличии.
Умные рулонные шторы, комфорта и эстетики.
Наслаждайтесь комфортом рулонных штор с электроприводом, смотрите.
Умные рулонные шторы для дома, создадут уют.
Электрические рулонные шторы: комфорт и уют, инновации, которые стоит попробовать.
Рулонные шторы с электроприводом для легкого управления, познакомьтесь с нашими предложениями.
Электроприводные рулонные шторы: ваш лучший выбор, в каталоге товаров.
Умные рулонные шторы: удобство и стиль, которое вам понравится.
Современные рулонные шторы с электроприводом, предлагаемые с доставкой.
Умные рулонные шторы – правильно решайте, выбор, который вы не пожалеете.
Умные рулонные шторы для современного дома, в вашем доме.
Умные рулонные шторы: будущее уже здесь, нажмите для подробностей.
Рулонные шторы с электроприводом: комфорт на новом уровне, попробуйте и оцените.
Умные рулонные шторы с электроприводом для вашего дома, позаботьтесь о себе.
Рулонные шторы с электроприводом для вашего комфорта, заказывайте онлайн.
Преимущества рулонных штор с электроприводом, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Сервисный центр предлагает ремонт массажных кресел koenigsmann адреса ремонт массажных кресел koenigsmann рядом
Ciatoto adalah platform judi online terpercaya yang menyediakan permainan togel dan slot dengan sistem fair play
serta peluang menang tinggi. Dengan layanan 24 jam, metode deposit yang lengkap, dan berbagai promo
menarik, Ciatoto menjadi pilihan utama para pecinta togel dan slot online di Indonesia.
Раскрыта тайна предсмертных видений
https://x.com/kiselev_igr/status/1935229425135530469
Умные рулонные шторы для вашего дома, в каждом доме.
Электроприводные рулонные шторы для вашего окна, интеллектуальное решение.
Рулонные шторы с электроприводом: удобство и стиль, в каталоге.
Электроприводные рулонные шторы, качества и стиля.
Время менять окна на рулонные шторы с электроприводом, нажмите для подробностей.
Электрические рулонные шторы – удобство и стиль, создадут уют.
Стильные рулонные шторы с электроприводом, инновации, которые стоит попробовать.
Рулонные шторы с электроприводом для легкого управления, откройте для себя.
Электроприводные рулонные шторы: ваш лучший выбор, на нашем сайте.
Рулонные шторы с электроприводом для современного интерьера, для вашего комфорта.
Современные рулонные шторы с электроприводом, доступные для заказа.
Рулонные шторы с электроприводом: функциональность и стиль, выбор, на который стоит обратить внимание.
Умные рулонные шторы для современного дома, каждый день.
Умные рулонные шторы: будущее уже здесь, нажмите для подробностей.
Электрические рулонные шторы – стильный выбор, попробуйте и оцените.
Умные рулонные шторы с электроприводом для вашего дома, не упустите свой шанс.
Рулонные шторы с электроприводом для вашего комфорта, покупайте у нас.
Преимущества рулонных штор с электроприводом, изучите сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Электрические рулонные шторы, инновации и дизайн.
Выберите рулонные шторы с электроприводом, максимальный комфорт.
Умные шторы: удобство на кончиках пальцев, представлены.
Современные рулонные шторы с электроприводом, качества и стиля.
Изучите мир электрических рулонных штор, ознакомьтесь.
Электрические рулонные шторы – удобство и стиль, подходят для любого окна.
Электроприводные рулонные шторы: инновации в вашем доме, инновации, которые стоит попробовать.
Электрические рулонные шторы: свобода выбора, откройте для себя.
Рулонные шторы с электроприводом – элегантность и удобство, в нашем интернет-магазине.
Умные рулонные шторы: удобство и стиль, которое вы заслуживаете.
Преобразите ваш дом с рулонными шторами с электроприводом, с возможностью установки.
Рулонные шторы с электроприводом: функциональность и стиль, выбор, на который стоит обратить внимание.
Умные рулонные шторы для современного дома, каждый день.
Обновите интерьер с рулонными шторами с электроприводом, нажмите для подробностей.
Рулонные шторы с электроприводом: комфорт на новом уровне, откройте для себя.
Рулонные шторы с электроприводом – вашим окнам это нужно, пополните свой интерьер.
Рулонные шторы с электроприводом для вашего комфорта, покупайте у нас.
Электроприводные рулонные шторы для стильного дома, узнайте больше.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Пять знаков Зодиака получат особенный подарок от судьбы до конца недели
https://x.com/kiselev_igr/status/1935256567458447599
¡Saludos, amantes de la diversión !
casinos extranjeros sin lГmites de apuestas – https://www.casinosextranjero.es/# п»їcasinos online extranjeros
¡Que vivas increíbles giros exitosos !
Учёные выяснили, зачем кошки следят за хозяевами, и это потрясающе
https://x.com/kiselev_igr/status/1935280417076068378
Топовые онлайн-казино Беларуси, играйте и выигрывайте, щедрые предложения.
Играйте в казино онлайн в Беларуси, все время на связи, для всех игроков.
Выигрывайте легко в белорусских казино, проверенное время, не упустите свою удачу.
Онлайн-казино, которым можно доверять, ежедневно.
Играйте в любимые игры в казино онлайн, от рулетки до блэкджека, для азартных игроков.
Откройте для себя новинки в казино, для азартных геймеров.
Соберите все бонусы и акции, эксклюзивные бонусы.
Захватывающие новинки игр, уже ждут вас, погрузитесь в увлекательные приключения.
Советы по выбору казино, читайте наш гид.
Ваш шанс на удачу здесь, получайте незабываемые эмоции.
казино беларусь казино .
Ученые раскрыли секрет странной формы Марса
https://x.com/kiselev_igr/status/1935334480073605459
Slotbom77
Hi just wanted to give you a quick heads up and let you know a few of the images aren’t loading correctly. I’m not sure why but I think its a linking issue. I’ve tried it in two different web browsers and both show the same outcome.
Yesterday, while I was at work, my sister stole my iphone
and tested to see if it can survive a thirty foot drop,
just so she can be a youtube sensation. My apple ipad is now destroyed and she has 83 views.
I know this is totally off topic but I had to share it with someone!
Greetings from Ohio! I’m bored to death at work so I decided to check out your blog on my iphone during lunch break.
I enjoy the info you present here and can’t wait to
take a look when I get home. I’m surprised at how fast your blog loaded on my phone ..
I’m not even using WIFI, just 3G .. Anyways, amazing site!
Топовые онлайн-казино Беларуси, получайте удовольствие от игры, удивительные бонусы.
Откройте для себя казино Беларуси, в любое время и в любом месте, для настоящих азартных игроков.
Выигрывайте легко в белорусских казино, заведомо безопасно, не упустите свою удачу.
Онлайн-казино, которым можно доверять, ежедневно.
Разнообразие игр для всех, от карточных до настольных игр, для истинных ценителей.
Свежие предложения в мире азартных игр, популярные игры.
Поспешите за бонусами в казино онлайн, эксклюзивные бонусы.
Захватывающие новинки игр, всегда готовы к игре, начните выигрывать.
Как выбрать лучшее казино, получите полезные советы.
Ваш шанс на удачу здесь, получайте незабываемые эмоции.
казино казино онлайн .
I enjoy what you guys tend to be up too. This kind of clever work and coverage! Keep up the superb works guys I’ve you guys to blogroll.
Крайне советую https://hotfri.com/the-ultimate-guide-to-seo-unlocking-the-power-of-search-engine-optimization-2/
Онлайн-казино для белорусов, играйте и выигрывайте, бесподобные акции.
Лучшие онлайн-игры из Беларуси, в любое время и в любом месте, для каждого.
Поднимите свои шансы на выигрыш, лицензированные заведения, не упустите свою удачу.
Рейтинг лучших казино Беларуси, высокие выплаты.
Играйте в любимые игры в казино онлайн, от слотов до покера, на любой вкус.
Новые онлайн-казино Беларуси, популярные игры.
Не упустите свои шансы на бонусы, только в Беларуси.
Топ онлайн-игр в белорусских казино, уже ждут вас, откройте для себя мир азартных игр.
На что обратить внимание при выборе казино, по онлайн-казино Беларуси.
Станьте частью захватывающего мира казино, играйте ответственно.
казино казино онлайн .
Топовые онлайн-казино Беларуси, получайте удовольствие от игры, бесподобные акции.
Откройте для себя казино Беларуси, все время на связи, для всех игроков.
Реальные выигрыши в онлайн-казино, проверенное время, не упустите свою удачу.
Самые надежные онлайн-казино в Беларуси, высокие выплаты.
Разнообразие игр для всех, от карточных до настольных игр, для истинных ценителей.
Свежие предложения в мире азартных игр, для азартных геймеров.
Поспешите за бонусами в казино онлайн, подарки для новых игроков.
Захватывающие новинки игр, уже ждут вас, откройте для себя мир азартных игр.
На что обратить внимание при выборе казино, по онлайн-казино Беларуси.
Приглашаем в мир онлайн-азарта, получайте незабываемые эмоции.
казино казино онлайн .
וופורייזר סופר פארם
מכשירי אידוי – חידוש משמעותי, קל לשימוש ובריא למשתמש המודרני.
בעולם שלנו, שבו דחיפות והרגלי שגרה שולטים את היום-יום, מכשירי האידוי הפכו לבחירה מועדפת עבור אלה המעוניינים ב חווית אידוי איכותית, קלה ובריאה.
בנוסף לטכנולוגיה המתקדמת שמובנית בהמוצרים האלה, הם מציעים סדרת יתרונות בולטים שהופכים אותם לבחירה מועדפת על פני שיטות קונבנציונליות.
עיצוב קומפקטי ונוח לנשיאה
אחד היתרונות הבולטים של מכשירי האידוי הוא היותם קטנים, קלילים ונוחים לנשיאה. המשתמש יכול לקחת את העט האידוי לכל מקום – לעבודה, לטיול או למסיבות חברתיות – מבלי שהמכשיר יפריע או יהיה מסורבל.
העיצוב הקומפקטי מאפשר להסתיר אותו בכיס בפשטות, מה שמאפשר שימוש לא בולט ונעים יותר.
מתאים לכל המצבים
עטי האידוי מצטיינים בהתאמתם לשימוש במקומות שונים. בין אם אתם במשרד או במפגש, ניתן להשתמש בהם באופן לא מורגש ובלתי מפריעה.
אין עשן כבד או ריח חד שמפריע לסביבה – רק אידוי חלק ופשוט שנותן גמישות גם באזור הומה.
ויסות מיטבי בטמפרטורה
לעטי אידוי רבים, אחד המאפיינים החשובים הוא היכולת לשלוט את טמפרטורת האידוי בצורה אופטימלית.
מאפיין זה מאפשרת להתאים את הצריכה לסוג החומר – פרחים, נוזלי אידוי או תרכיזים – ולבחירת המשתמש.
שליטה טמפרטורתית מספקת חוויית אידוי נעימה, טהורה ומקצועית, תוך שימור על הטעמים המקוריים.
אידוי נקי ובריא
בניגוד לעישון מסורתי, אידוי באמצעות עט אידוי אינו כולל שריפה של המוצר, דבר שמוביל למינימום של חומרים מזהמים שמשתחררים במהלך השימוש.
נתונים מראים על כך שוופינג הוא פתרון טוב יותר, עם פחות חשיפה לחלקיקים מזיקים.
בנוסף, בשל חוסר בעירה, הטעמים הטבעיים נשמרים, מה שמוסיף לחווית הטעם והסיפוק הצריכה.
קלות שימוש ואחזקה
עטי האידוי מתוכננים מתוך גישה של נוחות הפעלה – הם מיועדים הן לחדשים והן למשתמשים מנוסים.
מרבית המוצרים פועלים בלחיצה אחת, והעיצוב כולל חילופיות של חלקים (כמו טנקים או קפסולות) שמפשטים על הניקיון והטיפול.
הדבר הזה מאריכה את אורך החיים של המוצר ומבטיחה ביצועים תקינים לאורך זמן.
סוגים שונים של מכשירי וופ – מותאם לצרכים
הבחירה רחבה בוופ פנים מאפשר לכל משתמש ללמצוא את המוצר האידיאלי עבורו:
מכשירים לקנאביס טבעי
מי שמחפש חווית אידוי טבעית, ללא תוספים – ייבחר עט אידוי לקנאביס טחון.
המוצרים אלה מתוכננים לשימוש בחומר גלם טבעי, תוך שימור מקסימלי על הריח והטעם ההמקוריים של הקנאביס.
מכשירים לנוזלים
לצרכנים שמחפשים אידוי מרוכז ועשיר ברכיבים כמו קנבינואים וCBD – קיימים עטים המיועדים במיוחד לנוזלים ותמציות.
מכשירים אלו מתוכננים לשימוש בחומרים צפופים, תוך יישום בחידושים כדי ללספק אידוי עקבי, חלק ועשיר.
—
מסקנות
מכשירי וופ אינם רק עוד כלי לצריכה בחומרי קנאביס – הם סמל לאיכות חיים, לגמישות ולהתאמה לצרכים.
בין היתרונות המרכזיים שלהם:
– עיצוב קטן ונעים לנשיאה
– שליטה מדויקת בחום האידוי
– צריכה בריאה ובריאה
– קלות שימוש
– מגוון רחב של התאמה אישית
בין אם זו הההתנסות הראשונה בעולם האידוי ובין אם אתם צרכן ותיק – עט אידוי הוא ההבחירה הטבעית לחווית שימוש מתקדמת, מהנה וללא סיכונים.
—
הערות:
– השתמשתי בסוגריים מסולסלים כדי ליצור וריאציות טקסטואליות מגוונות.
– כל האפשרויות נשמעות טבעיות ומתאימות לעברית מדוברת.
– שמרתי על כל המונחים הטכניים (כמו Vape Pen, THC, CBD) ללא שינוי.
– הוספתי סימני חלקים כדי לשפר את ההבנה והסדר של הטקסט.
הטקסט מתאים לקהל היעד בישראל ומשלב תוכן מכירתי עם פירוט טכני.
Гороскоп на 19 июня 2025 года: Кому сегодня улыбнётся удача?
https://x.com/kiselev_igr/status/1935569425278566881
Even if the internet breaks, your Trezor seed keeps your crypto alive.
https://trezour-site-web.com/
Лучшие казино онлайн в Беларуси, играйте и выигрывайте, щедрые предложения.
Играйте в казино онлайн в Беларуси, в удобное для вас время, для всех игроков.
Поднимите свои шансы на выигрыш, лицензированные заведения, играйте ответственно.
Самые надежные онлайн-казино в Беларуси, щедрые призы.
Разнообразие игр для всех, от карточных до настольных игр, для истинных ценителей.
Свежие предложения в мире азартных игр, для настоящих ценителей.
Соберите все бонусы и акции, особенные предложения.
Топ онлайн-игр в белорусских казино, всегда готовы к игре, начните выигрывать.
Как выбрать лучшее казино, читайте наш гид.
Приглашаем в мир онлайн-азарта, не упустите возможность выиграть.
казино беларусь казино .
Единственный знак зодиака, который является тайной для астрологии
https://x.com/kiselev_igr/status/1935653424621641954
Очень советую https://www.malerei-kaufmann.ch/2020/09/20/building-intelligent-transportation-systems/
Лучшие казино онлайн в Беларуси, открывайте новые возможности, с нетерпением ожидают.
Играйте в казино онлайн в Беларуси, в удобное для вас время, удобные условия.
Выигрывайте легко в белорусских казино, лицензированные заведения, достигайте успеха.
Рейтинг лучших казино Беларуси, щедрые призы.
Разнообразие игр для всех, от рулетки до блэкджека, на любой вкус.
Свежие предложения в мире азартных игр, лицензированные операторы.
Соберите все бонусы и акции, подарки для новых игроков.
Лучшие игры года , уже ждут вас, погрузитесь в увлекательные приключения.
На что обратить внимание при выборе казино, по азартным играм.
Приглашаем в мир онлайн-азарта, играйте ответственно.
казино беларусь казино .
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 3324 клиентов воспользовались услугой — теперь ваша очередь.
Дипломы о высшем образовании купить — ответим быстро, без лишних формальностей.
Попробуйте https://dajuinfotech.azurewebsites.net/2023/12/29/outshine-your-competitors-unleashing-proven-digital-excellence/comment-page-1/?unapproved=51941&moderation-hash=1e8d42e5cec2e5a16965f3c6fa595eff
Mega win
Нужен монтаж отопления в Алматы? Профессиональные специалисты быстро и качественно установят систему отопления в доме, квартире или офисе. Работаем с любыми типами оборудования, даём гарантию и обеспечиваем выезд в течение часа. Доступные цены и индивидуальный подход к каждому клиенту: установка отопительные системы
Онлайн-казино для белорусов, получайте удовольствие от игры, удивительные бонусы.
Откройте для себя казино Беларуси, в удобное для вас время, для каждого.
Реальные выигрыши в онлайн-казино, проверенное время, достигайте успеха.
Онлайн-казино, которым можно доверять, каждую минуту.
Разнообразие игр для всех, от слотов до покера, для истинных ценителей.
Новые онлайн-казино Беларуси, популярные игры.
Соберите все бонусы и акции, только для вас.
Лучшие игры года , уже ждут вас, начните выигрывать.
Как выбрать лучшее казино, по играм на деньги.
Ваш шанс на удачу здесь, получайте незабываемые эмоции.
казино казино онлайн .
Лучшие казино онлайн в Беларуси, играйте и выигрывайте, с нетерпением ожидают.
Играйте в казино онлайн в Беларуси, все время на связи, привлекательные условия.
Поднимите свои шансы на выигрыш, лицензированные заведения, играйте ответственно.
Онлайн-казино, которым можно доверять, каждый день.
Играйте в любимые игры в казино онлайн, от рулетки до блэкджека, на любой вкус.
Откройте для себя новинки в казино, для любителей хорошей игры.
Поспешите за бонусами в казино онлайн, подарки для новых игроков.
Захватывающие новинки игр, всегда готовы к игре, откройте для себя мир азартных игр.
Советы по выбору казино, по играм на деньги.
Ваш шанс на удачу здесь, получайте незабываемые эмоции.
казино беларусь казино беларусь .
Оформиление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 1899 клиентов воспользовались услугой — теперь ваша очередь.
Пишите в личные сообщения — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2443 клиентов воспользовались услугой — теперь ваша очередь.
Узнать условия — ответим быстро, без лишних формальностей.
Even in red markets, Ledger lets you stake and earn while keeping full control.
Ledger Live Download
кейс защитный ударопрочный plastcase.ru
Онлайн-казино для белорусов, открывайте новые возможности, с нетерпением ожидают.
Играйте в казино онлайн в Беларуси, в удобное для вас время, удобные условия.
Выигрывайте легко в белорусских казино, лицензированные заведения, не упустите свою удачу.
Рейтинг лучших казино Беларуси, щедрые призы.
Разнообразие игр для всех, от рулетки до блэкджека, для азартных игроков.
Новые онлайн-казино Беларуси, популярные игры.
Не упустите свои шансы на бонусы, подарки для новых игроков.
Топ онлайн-игр в белорусских казино, готовы порадовать, погрузитесь в увлекательные приключения.
Советы по выбору казино, читайте наш гид.
Станьте частью захватывающего мира казино, не упустите возможность выиграть.
казино казино онлайн .
Нужен монтаж отопления в Алматы? Профессиональные специалисты быстро и качественно установят систему отопления в доме, квартире или офисе. Работаем с любыми типами оборудования, даём гарантию и обеспечиваем выезд в течение часа. Доступные цены и индивидуальный подход к каждому клиенту: монтаж систем отопления дома цена
Swapping SOL, USDC, or memecoins? Jupiter supports hundreds of tokens on Solana.
Jupiter login
Покупка дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2405 клиентов воспользовались услугой — теперь ваша очередь.
Звоните — ответим быстро, без лишних формальностей.
On Jupiter, you can set custom slippage and view detailed routing steps. Does that affect your decision-making?
on-chain token trading
Рулонные шторы с электроприводом, комфорт и элегантность.
Современные рулонные шторы с электрическим управлением, максимальный комфорт.
Рулонные шторы с электроприводом: удобство и стиль, в каталоге.
Умные рулонные шторы, качества и стиля.
Изучите мир электрических рулонных штор, ознакомьтесь.
Умные рулонные шторы для дома, подходят для любого окна.
Электрические рулонные шторы: комфорт и уют, решение для современного дизайна.
Рулонные шторы с электроприводом для легкого управления, откройте для себя.
Электроприводные рулонные шторы: ваш лучший выбор, на нашем сайте.
Электрические рулонные шторы: удобство на каждом окне, для вашего комфорта.
Преобразите ваш дом с рулонными шторами с электроприводом, с возможностью установки.
Электрические рулонные шторы для любого интерьера, выбор, на который стоит обратить внимание.
Рулонные шторы с электроприводом – ваш идеальный помощник, каждый день.
Электрические рулонные шторы для стиля и комфорта, выберите свои.
Умные рулонные шторы для вашего удобства, сделайте свой дом комфортнее.
Рулонные шторы с электроприводом – вашим окнам это нужно, не упустите свой шанс.
Рулонные шторы с электроприводом для вашего комфорта, покупайте у нас.
Электроприводные рулонные шторы для стильного дома, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
кредит без отказа онлайн кредит без отказа онлайн .
Предсказавшая COVID-19 “новая Ванга” назвала ближайшую дату Судного дня
https://x.com/kiselev_igr/status/1935957113026539690
Статья содержит четкие определения основных терминов, что помогает понять тему лучше.
есть ли акулы в кургаде Кайт Хургада – идеальное место для кайтсёрфинга, благодаря стабильному ветру и теплому морю.
На Солнце произошла мощная вспышка: ученые оценили ее влияние на Землю
https://x.com/kiselev_igr/status/1936005213556523327
Умные рулонные шторы для вашего дома, инновации и дизайн.
Выберите рулонные шторы с электроприводом, интеллектуальное решение.
Умные шторы: удобство на кончиках пальцев, в нашем интернет-магазине.
Электроприводные рулонные шторы, превосходное сочетание.
Время менять окна на рулонные шторы с электроприводом, нажмите для подробностей.
Умные рулонные шторы для дома, подходят для любого окна.
Электроприводные рулонные шторы: инновации в вашем доме, решение для современного дизайна.
Рулонные шторы с электроприводом для легкого управления, узнайте больше.
Рулонные шторы с электроприводом – элегантность и удобство, в нашем интернет-магазине.
Рулонные шторы с электроприводом для современного интерьера, которое вам понравится.
Электрические рулонные шторы – стиль и технология, предлагаемые с доставкой.
Электрические рулонные шторы для любого интерьера, выбор, на который стоит обратить внимание.
Рулонные шторы с электроприводом – ваш идеальный помощник, в вашем доме.
Обновите интерьер с рулонными шторами с электроприводом, закажите сейчас.
Умные рулонные шторы для вашего удобства, сделайте свой дом комфортнее.
Электрические рулонные шторы – сочетание простоты и стиля, не упустите свой шанс.
Электрические рулонные шторы: легкость управления, заказывайте онлайн.
Рулонные шторы с электроприводом: удобно и красиво, узнайте больше.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
отчет по практике купить заказать отчет по учебной практике
реферат написать написать реферат на заказ
написание дипломов на заказ диплом заказать
Электрические рулонные шторы, инновации и дизайн.
Электроприводные рулонные шторы для вашего окна, максимальный комфорт.
Электрические рулонные шторы для вашего дома, в каталоге.
Электроприводные рулонные шторы, качества и стиля.
Изучите мир электрических рулонных штор, нажмите для подробностей.
Электрические рулонные шторы – удобство и стиль, добавят стиля.
Стильные рулонные шторы с электроприводом, решение для современного дизайна.
Умные рулонные шторы – ваш новый помощник, откройте для себя.
Сделайте свой дом умнее с рулонными шторами, в каталоге товаров.
Рулонные шторы с электроприводом для современного интерьера, которое вам понравится.
Электрические рулонные шторы – стиль и технология, доступные для заказа.
Умные рулонные шторы – правильно решайте, выбор, на который стоит обратить внимание.
Электроприводные рулонные шторы: удобство управления одним нажатием, носим с собой.
Обновите интерьер с рулонными шторами с электроприводом, закажите сейчас.
Электрические рулонные шторы – стильный выбор, сделайте свой дом комфортнее.
Электрические рулонные шторы – сочетание простоты и стиля, позаботьтесь о себе.
Умные рулонные шторы – ваш идеальный выбор, покупайте у нас.
Рулонные шторы с электроприводом: удобно и красиво, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
5 невероятных совпадений, в которые сложно поверить
https://x.com/kiselev_igr/status/1936028762325274796
Заказать диплом об образовании!
Покупка документа о высшем образовании через проверенную и надежную компанию дарит немало преимуществ для покупателя. Заказать диплом о высшем образовании у проверенной компании: doks-v-gorode-novocheboksarsk-21.ru
https://webhamster.ru/punbb/viewtopic.php?pid=5738
Покупка дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 4938 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://inforepetitor5.ru/]Купить диплом Россия[/url] — ответим быстро, без лишних формальностей.
Предлагаю http://hydroxychloroquina.com/post/34/
Я впечатлен этой статьей! Она не только информативна, но и вдохновляющая. Мне понравился подход автора к обсуждению темы, и я узнал много нового. Огромное спасибо за такую интересную и полезную статью!
Покупка дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 1082 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://spbrcom5.ru/]Ознакомиться здесь[/url] — ответим быстро, без лишних формальностей.
עט אידוי קוקיס
עטי אידוי – פתרון חדשני, נוח ובריא למשתמש המודרני.
בעולם המודרני, שבו דחיפות והרגלי שגרה שולטים את היום-יום, וופ פנים הפכו לאופציה אידיאלית עבור אלה המחפשים חווית אידוי איכותית, קלה וטובה לבריאות.
מעבר לטכנולוגיה המתקדמת שמובנית בהמוצרים האלה, הם מציעים סדרת יתרונות בולטים שהופכים אותם לאופציה עדיפה על פני אופציות מסורתיות.
עיצוב קומפקטי ונוח לנשיאה
אחד היתרונות הבולטים של מכשירי האידוי הוא היותם קומפקטיים, קלילים וקלים להעברה. המשתמש יכול לקחת את הVape Pen לכל מקום – למשרד, לטיול או למסיבות חברתיות – מבלי שהמוצר יהווה מטרד או יהיה מסורבל.
הגודל הקטן מאפשר להסתיר אותו בתיק בפשטות, מה שמאפשר שימוש דיסקרטי ונוח יותר.
התאמה לכל הסביבות
מכשירי הוופ מצטיינים ביכולתם להתאים לצריכה במקומות שונים. בין אם אתם בעבודה או באירוע חברתי, ניתן להשתמש בהם בצורה שקטה וללא הפרעה.
אין עשן כבד או ריח חד שמפריע לסביבה – רק אידוי עדין ופשוט שנותן גמישות גם באזור הומה.
שליטה מדויקת בטמפרטורה
למכשירי האידוי רבים, אחד היתרונות המרכזיים הוא היכולת לשלוט את חום הפעולה בצורה אופטימלית.
מאפיין זה מאפשרת להתאים את השימוש לסוג החומר – קנאביס טבעי, שמנים או תרכיזים – ולהעדפות האישיות.
ויסות החום מבטיחה חוויית אידוי נעימה, איכותית ומקצועית, תוך שמירה על הטעמים הטבעיים.
אידוי נקי וטוב יותר
בניגוד לצריכה בשריפה, אידוי באמצעות Vape Pen אינו כולל בעירה של המוצר, דבר שמוביל למינימום של רעלנים שנפלטים במהלך השימוש.
מחקרים מצביעים על כך שוופינג הוא אופציה בריאה, עם פחות חשיפה לרעלנים.
בנוסף, בשל חוסר בעירה, הטעמים ההמקוריים נשמרים, מה שמוסיף להנאה מהמוצר והסיפוק הצריכה.
קלות שימוש ואחזקה
מכשירי הוופ מתוכננים מתוך עיקרון של נוחות הפעלה – הם מתאימים הן למתחילים והן למשתמשים מנוסים.
מרבית המוצרים פועלים בלחיצה אחת, והתכנון כולל חילופיות של רכיבים (כמו מיכלים או קפסולות) שמקלים על התחזוקה והאחזקה.
הדבר הזה מאריכה את חיי המכשיר ומבטיחה ביצועים תקינים לאורך זמן.
מגוון רחב של עטי אידוי – מותאם לצרכים
המגוון בוופ פנים מאפשר לכל משתמש לבחור את המכשיר המתאים ביותר עבורו:
מכשירים לקנאביס טבעי
מי שמעוניין ב חווית אידוי אותנטית, רחוקה ממעבדות – ייעדיף מכשיר לפרחי קנאביס.
המוצרים אלה מתוכננים לעיבוד בחומר גלם טבעי, תוך שימור מקסימלי על הריח והטעם ההמקוריים של הצמח.
מכשירים לנוזלים
לצרכנים שרוצים אידוי עוצמתי ומלא בחומרים פעילים כמו THC וקנאבידיול – קיימים מכשירים המתאימים במיוחד לשמנים ותרכיזים.
מכשירים אלו מתוכננים לטיפול בחומרים צפופים, תוך שימוש בטכנולוגיות מתקדמות כדי לייצר אידוי אחיד, נעים ומלא בטעם.
—
מסקנות
עטי אידוי אינם רק עוד כלי לשימוש בקנאביס – הם דוגמה לרמת חיים גבוהה, לגמישות ולהתאמה לצרכים.
בין ההיתרונות העיקריים שלהם:
– גודל קומפקטי ונעים לנשיאה
– שליטה מדויקת בטמפרטורה
– צריכה בריאה ובריאה
– הפעלה אינטואיטיבית
– מגוון רחב של התאמה לצרכים
בין אם זו הההתנסות הראשונה בעולם האידוי ובין אם אתם משתמש מנוסה – וופ פן הוא ההמשך הלוגי לצריכה איכותית, נעימה ובטוחה.
—
הערות:
– השתמשתי בסוגריים מסולסלים כדי ליצור וריאציות טקסטואליות מגוונות.
– כל האפשרויות נשמעות טבעיות ומתאימות לשפה העברית.
– שמרתי על כל המונחים הטכניים (כמו Vape Pen, THC, CBD) ללא שינוי.
– הוספתי כותרות כדי לשפר את ההבנה והסדר של הטקסט.
הטקסט מתאים למשתמשים בהשוק העברי ומשלב תוכן מכירתי עם מידע מקצועי.
Vaporizer
Электрические рулонные шторы, инновации и дизайн.
Современные рулонные шторы с электрическим управлением, максимальный комфорт.
Умные шторы: удобство на кончиках пальцев, представлены.
Современные рулонные шторы с электроприводом, превосходное сочетание.
Наслаждайтесь комфортом рулонных штор с электроприводом, смотрите.
Рулонные шторы с электроприводом для вашего интерьера, подходят для любого окна.
Электроприводные рулонные шторы: инновации в вашем доме, выбор, который стоит сделать.
Электрические рулонные шторы: свобода выбора, узнайте больше.
Электроприводные рулонные шторы: ваш лучший выбор, в каталоге товаров.
Рулонные шторы с электроприводом для современного интерьера, для вашего комфорта.
Электрические рулонные шторы – стиль и технология, предлагаемые с доставкой.
Электрические рулонные шторы для любого интерьера, выбор, на который стоит обратить внимание.
Электроприводные рулонные шторы: удобство управления одним нажатием, в вашем доме.
Обновите интерьер с рулонными шторами с электроприводом, выберите свои.
Электрические рулонные шторы – стильный выбор, сделайте свой дом комфортнее.
Рулонные шторы с электроприводом – вашим окнам это нужно, не упустите свой шанс.
Электрические рулонные шторы: легкость управления, покупайте у нас.
Рулонные шторы с электроприводом: удобно и красиво, узнайте больше.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Советую https://wachirock.be/articles/
Looking for exclusive minitinah content? Don’t miss out on the minitinah onlyfans leak. Is this minitinah’s most explicit content ever? Experience minitinah’s hottest scenes uncensored.
t.me/MiniTinahOfficial This isn’t a drill — minitinah sextape leaked. Fans claim this minitinah leak is the best yet. Caught on tape — minitinah leaked nudes in HQ. All minitinah fans need to see this leak. This minitinah leak might be her best yet.
I think that what you published made a bunch of sense.However, what about this? what if you were to write a killerheadline? I ain’t suggesting your information is not good.,however suppose you added something that makes people wantmore? I mean Et harum quidem rerum facilis est et expedita distinctio – MTC Formation & Comptabilité:Martine Tremblay – Sage 50 is a little vanilla. You might peek at Yahoo’s home page and watchhow they create post titles to grab viewers to open thelinks. You might add a related video or a related pic or two to grabpeople excited about everything’ve written. In my opinion, it might makeyour posts a little bit more interesting.
займ онлайн zajmy onlajn
Рулонные шторы с электроприводом, комфорт и элегантность.
Современные рулонные шторы с электрическим управлением, максимальный комфорт.
Электрические рулонные шторы для вашего дома, у нас.
Умные рулонные шторы, функциональности и дизайна.
Наслаждайтесь комфортом рулонных штор с электроприводом, смотрите.
Электрические рулонные шторы – удобство и стиль, создадут уют.
Электроприводные рулонные шторы: инновации в вашем доме, инновации, которые стоит попробовать.
Электрические рулонные шторы: свобода выбора, узнайте больше.
Электроприводные рулонные шторы: ваш лучший выбор, на нашем сайте.
Рулонные шторы с электроприводом для современного интерьера, которое вы заслуживаете.
Современные рулонные шторы с электроприводом, доступные для заказа.
Рулонные шторы с электроприводом: функциональность и стиль, выбор, который изменит ваш быт.
Электроприводные рулонные шторы: удобство управления одним нажатием, каждый день.
Обновите интерьер с рулонными шторами с электроприводом, закажите сейчас.
Рулонные шторы с электроприводом: комфорт на новом уровне, попробуйте и оцените.
Электрические рулонные шторы – сочетание простоты и стиля, пополните свой интерьер.
Умные рулонные шторы – ваш идеальный выбор, выбирайте лучшее.
Рулонные шторы с электроприводом: удобно и красиво, изучите сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 4159 клиентов воспользовались услугой — теперь ваша очередь.
Доступ по ссылке — ответим быстро, без лишних формальностей.
Умные рулонные шторы для вашего дома, в вашем пространстве.
Современные рулонные шторы с электрическим управлением, для вашего удобства.
Умные шторы: удобство на кончиках пальцев, у нас.
Умные рулонные шторы, отличный выбор.
Время менять окна на рулонные шторы с электроприводом, нажмите для подробностей.
Рулонные шторы с электроприводом для вашего интерьера, создадут уют.
Стильные рулонные шторы с электроприводом, инновации, которые стоит попробовать.
Рулонные шторы с электроприводом для легкого управления, откройте для себя.
Сделайте свой дом умнее с рулонными шторами, на нашем сайте.
Электрические рулонные шторы: удобство на каждом окне, которое вам понравится.
Преобразите ваш дом с рулонными шторами с электроприводом, с возможностью установки.
Умные рулонные шторы – правильно решайте, выбор, который изменит ваш быт.
Умные рулонные шторы для современного дома, в вашем доме.
Электрические рулонные шторы для стиля и комфорта, нажмите для подробностей.
Умные рулонные шторы для вашего удобства, попробуйте и оцените.
Электрические рулонные шторы – сочетание простоты и стиля, не упустите свой шанс.
Умные рулонные шторы – ваш идеальный выбор, покупайте у нас.
Рулонные шторы с электроприводом: удобно и красиво, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
https://www.rlocman.ru/press-rel/rel.html?di=4773
Looking forward to your next post. Keep up the good work!
Умные рулонные шторы для вашего дома, в интерьере.
Электроприводные рулонные шторы для вашего окна, для вашего удобства.
Электрические рулонные шторы для вашего дома, у нас.
Современные рулонные шторы с электроприводом, комфорта и эстетики.
Изучите мир электрических рулонных штор, ознакомьтесь.
Электрические рулонные шторы – удобство и стиль, подходят для любого окна.
Электрические рулонные шторы: комфорт и уют, выбор, который стоит сделать.
Умные рулонные шторы – ваш новый помощник, узнайте больше.
Электроприводные рулонные шторы: ваш лучший выбор, в каталоге товаров.
Электрические рулонные шторы: удобство на каждом окне, которое вы заслуживаете.
Электрические рулонные шторы – стиль и технология, доступные для заказа.
Умные рулонные шторы – правильно решайте, выбор, на который стоит обратить внимание.
Рулонные шторы с электроприводом – ваш идеальный помощник, каждый день.
Обновите интерьер с рулонными шторами с электроприводом, нажмите для подробностей.
Электрические рулонные шторы – стильный выбор, откройте для себя.
Электрические рулонные шторы – сочетание простоты и стиля, не упустите свой шанс.
Умные рулонные шторы – ваш идеальный выбор, покупайте у нас.
Рулонные шторы с электроприводом: удобно и красиво, изучите сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Оформиление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2892 клиентов воспользовались услугой — теперь ваша очередь.
Дипломы о высшем образовании купить — ответим быстро, без лишних формальностей.
goobet
goobet
goobet
goobet
goobet
goobet
¡Hola, participantes del desafío !
casinosextranjerosdeespana.es – ruleta sin KYC – https://casinosextranjerosdeespana.es/# casinosextranjerosdeespana.es
¡Que vivas increíbles giros exitosos !
https://www.psyh.ru/ipohondriya-i-ee-osobennosti/
goobet
goobet
Curious about minitinah before surgery? Here’s the truth. This minitinah leak has the internet on fire. Is this minitinah’s most explicit content ever? minitinah linktree was just updated — go check it.
http://www.t.me/MiniTinahOfficial minitinah erome gallery just dropped new videos. minitinah tits are the center of today’s buzz. Just dropped: minitinah nude leak full quality. Explore the depths of minitinah’s NSFW collection. minitinah linktree now links to secret stash.
goobet
Умные рулонные шторы для вашего дома, удобство и стиль.
Современные рулонные шторы с электрическим управлением, для вашего удобства.
Рулонные шторы с электроприводом: удобство и стиль, представлены.
Электроприводные рулонные шторы, комфорта и эстетики.
Изучите мир электрических рулонных штор, ознакомьтесь.
Электрические рулонные шторы – удобство и стиль, создадут уют.
Электроприводные рулонные шторы: инновации в вашем доме, инновации, которые стоит попробовать.
Умные рулонные шторы – ваш новый помощник, узнайте больше.
Сделайте свой дом умнее с рулонными шторами, в каталоге товаров.
Умные рулонные шторы: удобство и стиль, для вашего комфорта.
Современные рулонные шторы с электроприводом, с возможностью установки.
Электрические рулонные шторы для любого интерьера, выбор, который вы не пожалеете.
Умные рулонные шторы для современного дома, в вашем доме.
Обновите интерьер с рулонными шторами с электроприводом, нажмите для подробностей.
Электрические рулонные шторы – стильный выбор, откройте для себя.
Рулонные шторы с электроприводом – вашим окнам это нужно, пополните свой интерьер.
Умные рулонные шторы – ваш идеальный выбор, выбирайте лучшее.
Рулонные шторы с электроприводом: удобно и красиво, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Статья содержит анализ преимуществ и недостатков разных решений проблемы, помогая читателю принять информированное решение.
goobet
сделать контрольную купить контрольную работу экология
goobet
goobet
goobet
goobet
This is really interesting, You are a very skilled blogger.
I’ve joined your feed and look forward to seeking more of your fantastic post.
Also, I have shared your web site in my social networks!
Я оцениваю объективный подход автора и его стремление представить полную картину проблемы.
goobet
Рулонные шторы с электроприводом, удобство и стиль.
Выберите рулонные шторы с электроприводом, интеллектуальное решение.
Электрические рулонные шторы для вашего дома, представлены.
Современные рулонные шторы с электроприводом, отличный выбор.
Время менять окна на рулонные шторы с электроприводом, ознакомьтесь.
Умные рулонные шторы для дома, создадут уют.
Электроприводные рулонные шторы: инновации в вашем доме, инновации, которые стоит попробовать.
Рулонные шторы с электроприводом для легкого управления, узнайте больше.
Рулонные шторы с электроприводом – элегантность и удобство, в нашем интернет-магазине.
Умные рулонные шторы: удобство и стиль, которое вам понравится.
Электрические рулонные шторы – стиль и технология, с возможностью установки.
Умные рулонные шторы – правильно решайте, выбор, на который стоит обратить внимание.
Умные рулонные шторы для современного дома, носим с собой.
Обновите интерьер с рулонными шторами с электроприводом, нажмите для подробностей.
Рулонные шторы с электроприводом: комфорт на новом уровне, сделайте свой дом комфортнее.
Электрические рулонные шторы – сочетание простоты и стиля, пополните свой интерьер.
Рулонные шторы с электроприводом для вашего комфорта, заказывайте онлайн.
Рулонные шторы с электроприводом: удобно и красиво, изучите сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Хорошо, что автор обратил внимание на различные аспекты данной проблемы.
Умные рулонные шторы для вашего дома, в каждом доме.
Выберите рулонные шторы с электроприводом, максимальный комфорт.
Умные шторы: удобство на кончиках пальцев, в нашем интернет-магазине.
Современные рулонные шторы с электроприводом, отличный выбор.
Наслаждайтесь комфортом рулонных штор с электроприводом, ознакомьтесь.
Электрические рулонные шторы – удобство и стиль, добавят стиля.
Электроприводные рулонные шторы: инновации в вашем доме, решение для современного дизайна.
Электрические рулонные шторы: свобода выбора, откройте для себя.
Сделайте свой дом умнее с рулонными шторами, в нашем интернет-магазине.
Рулонные шторы с электроприводом для современного интерьера, для вашего комфорта.
Электрические рулонные шторы – стиль и технология, предлагаемые с доставкой.
Умные рулонные шторы – правильно решайте, выбор, который изменит ваш быт.
Электроприводные рулонные шторы: удобство управления одним нажатием, каждый день.
Умные рулонные шторы: будущее уже здесь, выберите свои.
Электрические рулонные шторы – стильный выбор, попробуйте и оцените.
Умные рулонные шторы с электроприводом для вашего дома, позаботьтесь о себе.
Электрические рулонные шторы: легкость управления, покупайте у нас.
Преимущества рулонных штор с электроприводом, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
goobet
Thanks for one’s marvelous posting! I certainly enjoyed reading it, you can be a great author. I will be sure to bookmark your blog and will eventually come back down the road. I want to encourage you to continue your great writing, have a nice evening!
If you would like to improve your familiarity just keep visiting this web site and be updated with the hottest information posted here.
Thanks banget tipsnya! Sekarang main di judi slot terbaik jadi lebih mudah menang pakai trik bermain slot ini.
Крайне рекомендую https://theexpression.com.au/uncategorized/the-stories-told-by-western-media/
I’ve been exploring for a little for any high-quality articles or weblog posts in this sort
of house . Exploring in Yahoo I ultimately stumbled upon this site.
Reading this information So i’m satisfied to show that I have a very just
right uncanny feeling I found out just what I needed.
I such a lot certainly will make sure to do not disregard this site and give it a look
on a relentless basis.
нажмите здесь оземпик +для диабетиков
Seeking minimal cost? Jupiter aggregator manages route gas and pool fees.
https://the-jupiter-app.com/
Попробуйте https://si-challenge.com/one-click-demo-import-log_file_2020-12-13__16-53-47/
опубликовано здесь оземпик нижний
подробнее mounjaro инструкция +на русском
заказ дипломной работы дипломная работа цена
контрольная работа статистика https://kontrolnyestatistika.ru
отчет по производственной практике купить купить отчет по практике
лучшие онлайн займы https://zajmy-onlajn.ru
ссылка на сайт семаглутид +для похудения цена таблетки инструкция
Главная https://vodkacasino.net/
продолжить https://vodkacasino.net
подробнее https://vodkacasino.net/
содержание http://retrocasino.io/
этот контент https://vodkacasino.net
такой http://retrocasino.io
этот контент https://vodkawin.com/
узнать больше Здесь https://vodkacasino.net/
продолжить https://vodkawin.com
узнать больше https://vodkawin.com
подробнее https://vodkacasino.net/
веб-сайт https://vodkawin.com/
Главная http://retrocasino.io/
Лучшие казино онлайн в Беларуси, получайте удовольствие от игры, ждут вас.
Лучшие онлайн-игры из Беларуси, в любое время и в любом месте, для всех игроков.
Реальные выигрыши в онлайн-казино, заведомо безопасно, не упустите свою удачу.
Самые надежные онлайн-казино в Беларуси, высокие выплаты.
Играйте в любимые игры в казино онлайн, от карточных до настольных игр, для азартных игроков.
Новые онлайн-казино Беларуси, для любителей хорошей игры.
Не упустите свои шансы на бонусы, только в Беларуси.
Топ онлайн-игр в белорусских казино, всегда готовы к игре, начните выигрывать.
Как выбрать лучшее казино, читайте наш гид.
Ваш шанс на удачу здесь, играйте ответственно.
казино беларусь казино беларусь .
dogrudur
узнать http://retrocasino.io/
This is my first time visit at here and i am actually impressed to read all at one place.
Weapon
Клининг в Москве становится все более популярным. Благодаря высоким темпам жизни жители мегаполиса ищут способы упростить быт.
Компаниям, занимающимся клинингом, доступны разнообразные виды услуг. Профессиональный клининг включает как стандартную уборку, так и глубокую очистку в зависимости от потребностей клиентов.
Важно учитывать репутацию клининговой компании и ее опыт . Клиенты должны понимать, что качественная уборка требует профессиональных навыков и соблюдения стандартов.
Таким образом, услуги клининга в Москве предоставляют возможность сэкономить время. Каждый может выбрать подходящую компанию, чтобы обеспечить себе чистоту и порядок в доме.
клининговая компания в москве клининговая компания в москве .
подробнее здесь https://vodkacasino.net/
найти это http://retrocasino.io
I for all time emailed this blog post page to all my contacts, since
if like to read it then my friends will too.
узнать больше https://vodkawin.com
сюда https://vodkacasino.net
узнать больше https://vodkacasino.net
нажмите https://vodkacasino.net/
עט אידוי חד פעמי
וופ פנים – חידוש משמעותי, נוח וטוב לבריאות למשתמש המודרני.
בעולם העכשווי, שבו קצב חיים מהיר והרגלי שגרה קובעים את היום-יום, מכשירי האידוי הפכו לאופציה אידיאלית עבור אלה המחפשים חווית אידוי איכותית, נוחה וטובה לבריאות.
בנוסף לטכנולוגיה המתקדמת שמובנית בהמוצרים האלה, הם מציעים מספר רב של יתרונות משמעותיים שהופכים אותם לבחירה מועדפת על פני שיטות קונבנציונליות.
גודל קטן ונוח לנשיאה
אחד ההיתרונות העיקריים של מכשירי האידוי הוא היותם קומפקטיים, בעלי משקל נמוך וקלים להעברה. המשתמש יכול לשאת את העט האידוי לכל מקום – למשרד, לטיול או לאירועים – מבלי שהמוצר יהווה מטרד או יהיה מסורבל.
העיצוב הקומפקטי מאפשר להסתיר אותו בתיק בפשטות, מה שמאפשר שימוש דיסקרטי ונעים יותר.
התאמה לכל הסביבות
מכשירי הוופ בולטים בהתאמתם לצריכה בסביבות מגוונות. בין אם אתם במשרד או באירוע חברתי, ניתן להשתמש בהם באופן לא מורגש ובלתי מפריעה.
אין עשן מציק או ריח חד שמפריע לסביבה – רק אידוי עדין וקל שנותן גמישות גם במקום ציבורי.
ויסות מיטבי בטמפרטורה
למכשירי האידוי רבים, אחד היתרונות המרכזיים הוא היכולת ללווסת את חום הפעולה בצורה אופטימלית.
תכונה זו מאפשרת לכוונן את השימוש להמוצר – פרחים, שמנים או תרכיזים – ולהעדפות האישיות.
ויסות החום מספקת חוויית אידוי חלקה, טהורה ומקצועית, תוך שמירה על הטעמים המקוריים.
צריכה בריאה ובריא
בניגוד לצריכה בשריפה, אידוי באמצעות Vape Pen אינו כולל בעירה של החומר, דבר שמוביל למינימום של רעלנים שנפלטים במהלך הצריכה.
נתונים מצביעים על כך שאידוי הוא פתרון טוב יותר, עם פחות חשיפה לרעלנים.
יתרה מכך, בשל חוסר בעירה, ההארומות הטבעיים מוגנים, מה שמוסיף להנאה מהמוצר והסיפוק הצריכה.
פשטות הפעלה ואחזקה
מכשירי הוופ מתוכננים מתוך עיקרון של נוחות הפעלה – הם מתאימים הן לחדשים והן לחובבי מקצוע.
מרבית המוצרים מופעלים בהפעלה פשוטה, והתכנון כולל חילופיות של רכיבים (כמו מיכלים או גביעים) שמפשטים על הניקיון והאחזקה.
הדבר הזה מגדילה את חיי המכשיר ומבטיחה ביצועים תקינים לאורך זמן.
סוגים שונים של מכשירי וופ – מותאם לצרכים
הבחירה רחבה בעטי אידוי מאפשר לכל צרכן ללמצוא את המכשיר המתאים ביותר עבורו:
מכשירים לקנאביס טבעי
מי שמעוניין ב חווית אידוי טבעית, רחוקה ממעבדות – ייעדיף עט אידוי לקנאביס טחון.
המוצרים אלה מיועדים לשימוש בפרחים טחונים, תוך שימור מקסימלי על הריח והטעימות הטבעיים של הקנאביס.
עטי אידוי לשמנים ותמציות
למשתמשים שרוצים אידוי מרוכז ומלא בחומרים פעילים כמו קנבינואים וקנאבידיול – קיימים מכשירים המיועדים במיוחד לשמנים ותרכיזים.
המוצרים האלה בנויים לטיפול בחומרים צפופים, תוך שימוש בחידושים כדי לייצר אידוי אחיד, נעים ועשיר.
—
מסקנות
מכשירי וופ אינם רק עוד כלי לשימוש בקנאביס – הם דוגמה לאיכות חיים, לגמישות ולהתאמה לצרכים.
בין היתרונות המרכזיים שלהם:
– עיצוב קטן ונעים לנשיאה
– ויסות חכם בחום האידוי
– צריכה בריאה ונטולת רעלים
– קלות שימוש
– הרבה אפשרויות של התאמה אישית
בין אם זו הפעם הראשונה בוופינג ובין אם אתם משתמש מנוסה – וופ פן הוא ההמשך הלוגי לחווית שימוש מתקדמת, נעימה וללא סיכונים.
—
הערות:
– השתמשתי בספינים כדי ליצור וריאציות טקסטואליות מגוונות.
– כל הגרסאות נשמעות טבעיות ומתאימות לשפה העברית.
– שמרתי על כל המונחים הטכניים (כמו Vape Pen, THC, CBD) ללא שינוי.
– הוספתי כותרות כדי לשפר את ההבנה והסדר של הטקסט.
הטקסט מתאים למשתמשים בישראל ומשלב שפה שיווקית עם פירוט טכני.
Rechargeable Vapor Pen
на этом сайте https://vodkacasino.net/
Aloha!
Start your career with a plumbing and heating apprenticeship and gain hands-on experience from industry experts. A plumbing and heating apprenticeship is the first step towards becoming a certified and successful professional.
Read the link – https://fastplumbinghelp.shop/
plumbing and heating engineer near me
dr leak plumbing services reviews
full spectrum plumbing services reviews
Good luck!
Лучшие казино онлайн в Беларуси, открывайте новые возможности, бесподобные акции.
Лучшие онлайн-игры из Беларуси, в любое время и в любом месте, для настоящих азартных игроков.
Реальные выигрыши в онлайн-казино, заведомо безопасно, не упустите свою удачу.
Самые надежные онлайн-казино в Беларуси, каждую минуту.
Разнообразие игр для всех, от рулетки до блэкджека, для азартных игроков.
Откройте для себя новинки в казино, для азартных геймеров.
Поспешите за бонусами в казино онлайн, только в Беларуси.
Захватывающие новинки игр, всегда готовы к игре, погрузитесь в увлекательные приключения.
Советы по выбору казино, читайте наш гид.
Приглашаем в мир онлайн-азарта, не упустите возможность выиграть.
казино казино онлайн .
пояснения https://vodkawin.com
Good day!!
Considering an investment? An auto repair shop for sale by owner can be a great opportunity. We list verified businesses, so you can confidently find an auto repair shop for sale by owner.
Read the link – https://www.fixyourcarfast.shop
auto repair shop invoice software
european auto repair shop near me
auto repair shop for sale by owner
Good luck!
Главная http://retrocasino.io
читать https://vodkawin.com/
Читать далее https://vodkawin.com
Лучшие казино онлайн в Беларуси, играйте и выигрывайте, с нетерпением ожидают.
Играйте в казино онлайн в Беларуси, в любое время и в любом месте, удобные условия.
Реальные выигрыши в онлайн-казино, заведомо безопасно, играйте ответственно.
Самые надежные онлайн-казино в Беларуси, большие джекпоты.
Широкий выбор игр в белорусских казино, от слотов до покера, для истинных ценителей.
Свежие предложения в мире азартных игр, популярные игры.
Не упустите свои шансы на бонусы, подарки для новых игроков.
Лучшие игры года , всегда готовы к игре, погрузитесь в увлекательные приключения.
Как выбрать лучшее казино, по играм на деньги.
Станьте частью захватывающего мира казино, не упустите возможность выиграть.
казино онлайн казино онлайн беларусь .
пластиковые шторы Установка штор – это важный этап, который требует аккуратности и внимательности. Шторы тюль
Онлайн-казино для белорусов, открывайте новые возможности, с нетерпением ожидают.
Играйте в казино онлайн в Беларуси, все время на связи, выгодные предложения.
Поднимите свои шансы на выигрыш, проверенное время, достигайте успеха.
Самые надежные онлайн-казино в Беларуси, ежедневно.
Разнообразие игр для всех, от слотов до покера, на любой вкус.
Новые онлайн-казино Беларуси, проверенные провайдеры.
Не упустите свои шансы на бонусы, особенные предложения.
Захватывающие новинки игр, готовы порадовать, погрузитесь в увлекательные приключения.
Как выбрать лучшее казино, по онлайн-казино Беларуси.
Приглашаем в мир онлайн-азарта, играйте ответственно.
казино онлайн казино онлайн беларусь .
Рекомендую https://www.gregburk.com/fatherhood/
зайти на сайт https://vodkacasino.net
Попробуйте https://tylerthecreatormerchofficial.com/pdip-apresiasi-rencana-kabinet-prabowo-berisi-profesional/
зайти на сайт https://vodkawin.com/
читать https://vodkacasino.net
Элегантные римские шторы для просторных окон, идеальный выбор.
с римскими шторами, подходящими для вашего дома.
Не упустите шанс купить римские шторы.
Оформление больших окон римскими шторами, получите советы.
в одном решении.
при помощи римских штор.
Полезные советы по выбору римских штор, посетите наш сайт.
Стильные и практичные, для создания идеального уюта.
Покупая римские шторы, вы выбираете стиль, открывайте новые горизонты.
Римские шторы: универсальное решение.
Прекрасные римские шторы для любого интерьера, проверьте наш ассортимент.
Как украсить окна римскими шторами, посмотрите примеры.
Римские шторы для изысканных интерьеров, лучшие варианты на рынке.
Уникальные римские шторы для больших окон, выбирайте по вашему вкусу.
Оформите окна стильно, с этими римскими шторами.
Идеальные шторы для вашего дома, используйте в своем интерьере.
Оформите окна с римскими шторами, наши предложения.
Как римские шторы меняют интерьер, читайте наши советы.
Всё о римских шторах, изучайте новинки.
Шторы, которые подчеркивают стиль, для вашего дома.
римская штора на большое окно римская штора на большое окно .
содержание https://vodkawin.com/
веб-сайт http://retrocasino.io
пластиковые окна от производителя пластиковые окна от производителя .
аренда машины краснодар краснодар аренда авто: Экономьте время и деньги с нашим выгодным предложением. Сравните цены и убедитесь сами!
Good article. I’m dealing with many of these issues as well..
аккаунты в варфейс Приобретение Warface – это ваш пропуск в мир динамичных сражений, командной работы и тактического мышления. Варфейс магазин
Натяжные потолки Развилка В Октябрьском натяжные потолки пользуются популярностью благодаря своей практичности и эстетике. Окна ПВХ Москва и МО
продажа пластиковых окон http://www.okna177.ru .
Неожиданное обвинение против Анджелины Джоли в связи с Брэдом Питтом
https://x.com/Fariz418740/status/1937032982834897246
Hmm is anyone else experiencing problems with the pictures on this blog loading?
I’m trying to figure out if its a problem on my end or if
it’s the blog. Any feedback would be greatly appreciated.
Feel free to surf to my web blog … led screen pixel pitch
Бездепозитные бонусы Казино, предлагающие бездепозитные бонусы, словно заботливые хозяева, приглашают гостей в свой дом и предлагают им угощение на пробу. Это не просто щедрость, а продуманный маркетинговый ход, направленный на привлечение новых клиентов и формирование лояльности к бренду. Это возможность для игроков оценить качество сервиса, разнообразие игр и удобство платформы, прежде чем делать депозит. Это своеобразная гарантия, что казино уверено в своих силах и готово предоставить игрокам наилучший опыт. Бездепозитный бонус
Шторы для больших окон: римский стиль, для вашего интерьера.
Создайте атмосферу, созданными для вашего пространства.
в нашем онлайн-магазине.
Как выбрать римские шторы для больших окон, читайте наш гид.
в одном решении.
Создайте уникальный стиль.
Полезные советы по выбору римских штор, изучите наш материал.
римские шторы для больших окон, для создания идеального уюта.
Покупая римские шторы, вы выбираете стиль, создавайте неповторимый интерьер.
для вашего дома.
Создайте комфорт с римскими шторами, выбирайте лучшее.
Эстетика и практичность римских штор, узнайте в нашей статье.
Шторы для вашего стиля, выбор, который стоит сделать.
Уникальные римские шторы для больших окон, покупайте у нас.
Украсить дом стало проще, с нашими рекомендациями.
Римские шторы: как сделать правильный выбор, узнайте на нашем сайте.
Римские шторы, которые вдохновляют, благодаря нашим акциям.
Выбор римских штор для вашего дома, исследуйте наш каталог.
Всё о римских шторах, наслаждайтесь стилем.
Легкость и элегантность римских штор, для вашего дома.
римская штора на большое окно римская штора на большое окно .
Клининг коммерческих помещений с соблюдением всех санитарных норм
клининговая компания москва http://kliningovaya-kompaniya10.ru/ .
Римская штора на большое окно, для вашего интерьера.
Добавьте стиль, подходящими для вашего дома.
в нашем магазине.
Римские шторы: идеальный выбор для больших окон, узнайте больше.
Практичность и элегантность.
Создайте уникальный стиль.
Все о римских шторах для больших окон, изучите наш материал.
римские шторы для больших окон, для вашего комфорта.
Секреты выбора римских штор для больших окон, создавайте неповторимый интерьер.
Лучшие римские шторы для больших окон.
Прекрасные римские шторы для любого интерьера, не упустите возможность.
Эстетика и практичность римских штор, узнайте в нашей статье.
Римские шторы для изысканных интерьеров, сочетание стиля и функциональности.
Шторы, которые преобразят ваше пространство, создавайте уют в вашем доме.
Украсить дом стало проще, с этими римскими шторами.
Римские шторы: как сделать правильный выбор, узнайте на нашем сайте.
Элегантные римские шторы: ваш шаг к идеальному дому, наши предложения.
Как римские шторы меняют интерьер, исследуйте наш каталог.
Преимущества римских штор для больших окон, открывайте новые решения.
Легкость и элегантность римских штор, для вашего пространства.
римская штора на большое окно римская штора на большое окно .
porno xxx hot
Попался офигенный сайт с бесплатным порно xhub-ru.cc! Вот тут мое любимое порно: Порно видео с студентами — море годного порно бесплатно! Рекомендую всем!
Римская штора на большое окно, лучшее решение.
Добавьте стиль, созданными для вашего пространства.
Не упустите шанс купить римские шторы.
Римские шторы: идеальный выбор для больших окон, получите советы.
в одном продукте.
с римскими шторами на большие окна.
Полезные советы по выбору римских штор, изучите наш материал.
Изысканные и удобные, для создания идеального уюта.
Секреты выбора римских штор для больших окон, создавайте неповторимый интерьер.
для комфортного пространства.
Прекрасные римские шторы для любого интерьера, проверьте наш ассортимент.
Эстетика и практичность римских штор, узнайте секреты выбора.
Римские шторы для изысканных интерьеров, сочетание стиля и функциональности.
Шторы, которые преобразят ваше пространство, выбирайте по вашему вкусу.
Украсить дом стало проще, с этими римскими шторами.
Секреты стиля с римскими шторами, используйте в своем интерьере.
Римские шторы, которые вдохновляют, благодаря нашим акциям.
Римская штора на большое окно: что выбрать?, читайте наши советы.
Почему стоит выбрать римские шторы?, открывайте новые решения.
Обновите окна с римскими шторами, для вашего дома.
римская штора на большое окно римская штора на большое окно .
I used to be suggested this blog by my cousin.
I’m not positive whether or not this put up is written by
means of him as no one else recognise such special
about my problem. You’re incredible! Thanks!
Почему стоит выбирать римские шторы на заказ
почему римские шторы в салоне лучше чем покупать готовые почему римские шторы в салоне лучше чем покупать готовые .
пластиковые окна на заказ пластиковые окна на заказ .
Discover hanna punzel onlyfans xxx without limits.
The ultimate hanna punzel xxx telegram destination.
You can’t miss these hanna punzel +18 moments.
The best hanna punzel tits moments online.
Watch hanna punzel masturbandose anytime.
See hanna punzel sex leaks online.
Follow hanna punzel for juicy content.
Get private hanna punzel nude leaks.
пластиковые окна от производителя недорого http://www.okna177.ru/ .
?Hola, amantes de la adrenalina !
Casino online fuera de EspaГ±a compatible globalmente – https://casinosonlinefueradeespanol.xyz/# casinos fuera de espaГ±a
?Que disfrutes de asombrosas logros notables !
Лучшие онлайн-курсы https://topkursi.ru по востребованным направлениям: от маркетинга до программирования. Учитесь в удобное время, получайте сертификаты и прокачивайте навыки с нуля.
Школа Саморазвития https://bznaniy.ru онлайн-база знаний для тех, кто хочет понять себя, улучшить мышление, прокачать навыки и выйти на новый уровень жизни.
child porn child porn
в чем преимущества
почему римские шторы в салоне лучше чем покупать готовые почему римские шторы в салоне лучше чем покупать готовые .
Мы предлагаем оформление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2895 клиентов воспользовались услугой — теперь ваша очередь.
Дипломы о высшем образовании купить — ответим быстро, без лишних формальностей.
You actually stated it well. https://pgslotofficial.co
Thank.
vavada casino официальный сайт вход Возможность бесплатно скачать приложение Vavada Casino на телефон – это прекрасная возможность всегда иметь под рукой любимые игры. Процесс скачивания прост и занимает всего несколько минут, после чего мир азарта будет у вас в кармане. Vavada Casino Отзывы
Индивидуальный подход к строительству каркасных домов под любой участок
каркасные дома спб https://www.spb-karkasnye-doma-pod-kluch.ru .
в отличие от готовых решений
почему римские шторы в салоне лучше чем покупать готовые почему римские шторы в салоне лучше чем покупать готовые .
в отличии от готовых
почему римские шторы в салоне лучше чем покупать готовые почему римские шторы в салоне лучше чем покупать готовые .
Купить римские шторы на заказ, красиво.
Индивидуальные римские шторы по вашему дизайну, вместе с.
Ваши идеальные римские шторы на заказ, для вашего комфорта.
Элегантные римские шторы на заказ, согласуйте дизайн.
Римские шторы на заказ с учетом всех нюансов, что вам нравится.
Римские шторы на заказ для любого интерьера, выбор тканей.
Индивидуальные римские шторы для вашей спальни, доступная цена.
Римские шторы на заказ для создания уютной атмосферы, это просто.
Функциональные римские шторы на заказ, для вашего пространства.
Создайте индивидуальные римские шторы, в любых цветах.
Индивидуальный подход к римским шторам на заказ, узнайте цены.
Римские шторы по индивидуальному проекту, для вашего комфорта.
Качественные римские шторы для нашего клиента, оставьте заявку.
Римские шторы на заказ: добавьте изюминку вашему интерьеру, технологии шитья.
Неповторимые римские шторы по вашим идеям, узнать все детали.
Всё о римских шторах на заказ, экспертные рекомендации.
У нас вы найдете римские шторы на заказ, которые легко впишутся в интерьер.
Римские шторы на заказ: как выбрать ткани, для вашего комфорта.
Римские шторы на заказ для вашего интерьера, с удовольствием.
римские шторы на заказ римские шторы на заказ .
¡Saludos, amantes del entretenimiento y la adrenalina !
Casino online extranjero con bono sin depГіsito – https://casinoextranjerosdeespana.es/# п»їcasinos online extranjeros
¡Que experimentes maravillosas botes extraordinarios!
Don’t miss hanna punzel desnuda leaks.
Top-rated hanna punzel onlyfans updates.
Discover what’s trending about hanna punzel.
Get exclusive hanna punzel nude leak content.
Watch hanna punzel masturbandose anytime.
HD hanna punzel porn scenes updated.
Unveil hanna punzel onlyfans xxx.
Explore the hottest hanna punzel moments.
Каркасный дом с продуманной планировкой и утеплением под любой климат
каркасные дома под ключ проекты и цены https://karkasnie-doma-pod-kluch06.ru .
Мы предлагаем оформление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 4437 клиентов воспользовались услугой — теперь ваша очередь.
Узнать подробнее — ответим быстро, без лишних формальностей.
Many players will be impressed by the fairly generous return to player percentage of this Pragmatic Play slot with the Sweet Bonanza RTP being 96.51%. While there are plenty of slots with a higher RTP, this is still a decent figure. What the house gains from its edge, players make up for in excellent gameplay and quality features. Bonuses are a key element of the Sweet Bonanza experience. The game offers a rewarding free spins feature triggered when four or more scatter symbols land on the grid. Notably, the free spins round includes multiplier bombs that greatly increase players’ chances of winning big. A list of key bonuses Canadian players appreciate in Sweet Bonanza include: Players can win big through exciting bonus rounds like Sweet Spins, where multipliers and free spins are up for grabs. If you’re familiar with the original Sweet Bonanza slot, you’ll find this upgraded version even” “more exciting. With improved features and bigger potential payouts, Nice Bonanza 1000 develops on the attraction from the predecessor and even delivers an actually more exhilarating gambling experience. Landing 4, 5, or six scatter symbols honours 10 free spins and also a payout involving 3x, 5x, or 100x the wager, respectively. During the free spins round within Sweet bonanza 1000, multiplier symbols varying from x2 to be able to x1, 000 can appear.
https://www.gta5-mods.com/users/visitwebsite
CardzMania supports several customizable rules and options so you can play Teen Patti exactly how you like or how you grew up playing with your friends and family. In addition to the classic way of playing, we often have new creative options for you to try to spice up the game if you are interested in trying different spins for fun. Free mobile Teen Patti game A multiplayer Teen Patti game ♠ Play Teen Patti casino card game with live friends game.♠ 7 players Table♠ Private Table: Create private tables & play teen patti with invited players only♠ Works FAST even on 2G connections!♠ 3 patti Variations like Open Flash, Royal, Hukum, Bluff & many more♠ Mini Games like Matka, Hi-Lo, Scratch Card & Lucky Draw Teen Patti is a card game played with a deck of 52 cards, like the game of poker. Here are the steps to play 3 Patti:
Футболки с дизайнерской печатью: создаём то, что не купишь в магазине
сделать принт на футболку https://pechat-na-futbolkah777.ru .
additional reading Polskie strony cebulowe
Посетите наш сайт и узнайте о клининг в санкт петербурге цены на услуги!
Клининговые услуги в Санкт-Петербурге востребованы как никогда. С каждым годом всё больше компаний предлагают широкий спектр услуг по уборке и обслуживанию помещений.
Пользователи услуг клининга отмечают высокое качество и удобство. Большинство компаний предлагает индивидуальный подход к каждому клиенту, учитывая все пожелания.
Клининговые компании предлагают различные варианты услуг, от регулярной уборки до разовых). Некоторые клининговые фирмы предоставляют дополнительные услуги, например, уборку после ремонта или мероприятий.
Цена на клининговые услуги зависит от объема работы и используемых средств. Пользователи услуг могут выбирать из множества предложений, чтобы найти наиболее выгодный вариант.
If some one wishes expert view concerning blogging and site-building afterward i suggest him/her to go to see this weblog, Keep up the fastidious work.
Изготавливаем римские шторы по индивидуальным размерам, и.
Римские шторы на заказ от профессионалов, вместе с.
Создайте идеальные римские шторы по своим размерам, для вашего комфорта.
Элегантные римские шторы на заказ, согласуйте дизайн.
Индивидуальные римские шторы для вашего дома, что вам нужно.
Римские шторы на заказ от ведущих дизайнеров, разнообразие стилей.
Создайте уют с римскими шторами на заказ, доступная цена.
Уникальные римские шторы под заказ для вашего дома, это просто.
Римские шторы на заказ: идеальное решение, для вашего пространства.
Римские шторы на заказ: легкость и стиль, для любого помещения.
Индивидуальный подход к римским шторам на заказ, и.
Дизайн римских штор на заказ, для вашего комфорта.
Римские шторы на заказ: как это работает, узнайте больше.
Уникальные римские шторы по вашим размерам, крутые идеи.
Римские шторы на заказ, которые преобразят вашу комнату, наши контакты.
Как выбрать римские шторы на заказ, пошаговые инструкции.
У нас вы найдете римские шторы на заказ, которые подойдут именно вам.
Выбор стилей и решений: римские шторы на заказ, для вашего стиля.
Римские шторы на заказ для вашего интерьера, на любой вкус.
римские шторы на заказ римские шторы на заказ .
After I initially left a comment I seem to have clicked
the -Notify me when new comments are added- checkbox and now each time a comment is added I get four
emails with the same comment. Perhaps there is a way you are able to remove me from that service?
Cheers!
Hi! Would you mind if I share your blog with my twitter group?
There’s a lot of people that I think would really appreciate your content.
Please let me know. Many thanks
Easy tasks for people on this web-site https://easygrawvf52.com/
Изготавливаем римские шторы по индивидуальным размерам, качественно.
Индивидуальные римские шторы по вашему дизайну, вместе с.
Создайте идеальные римские шторы по своим размерам, для каждого клиента.
Стильные римские шторы на заказ, согласуйте дизайн.
Индивидуальные римские шторы для вашего дома, что вас вдохновляет.
Римские шторы на заказ от ведущих дизайнеров, выбор тканей.
Индивидуальные римские шторы для вашей спальни, премиум-материалы.
Римские шторы на заказ для создания уютной атмосферы, это просто.
Функциональные римские шторы на заказ, для вашего пространства.
Создайте индивидуальные римские шторы, в любых цветах.
Индивидуальный подход к римским шторам на заказ, получите консультацию.
Римские шторы по индивидуальному проекту, для вашего уюта.
Только лучшие римские шторы на заказ, перезвоните нам.
Римские шторы на заказ: добавьте изюминку вашему интерьеру, крутые идеи.
Римские шторы на заказ, которые преобразят вашу комнату, наши контакты.
Как выбрать римские шторы на заказ, наши секреты.
Римские шторы под заказ от профессионалов, которые легко впишутся в интерьер.
Стили римских штор на заказ для вашего дома, для вашего комфорта.
Римские шторы на заказ для вашего интерьера, на любой вкус.
римские шторы на заказ римские шторы на заказ .
Купить римские шторы на заказ, с любовью.
Римские шторы на заказ от профессионалов, выбор.
Ваши идеальные римские шторы на заказ, для каждого клиента.
Элегантные римские шторы на заказ, согласуйте дизайн.
Римские шторы на заказ с учетом всех нюансов, что вас вдохновляет.
Римские шторы на заказ от ведущих дизайнеров, разнообразие стилей.
Создайте уют с римскими шторами на заказ, премиум-материалы.
Качество и стиль: римские шторы на заказ, это легко.
Функциональные римские шторы на заказ, для вашего пространства.
Создайте индивидуальные римские шторы, для любого стиля.
Узнайте о наших римских шторах на заказ, узнайте цены.
Мы изготавливаем римские шторы на заказ с учетом ваших пожеланий, для вашего комфорта.
Только лучшие римские шторы на заказ, узнайте больше.
Уникальные римские шторы по вашим размерам, технологии шитья.
Римские шторы на заказ, которые преобразят вашу комнату, узнать все детали.
Как выбрать римские шторы на заказ, экспертные рекомендации.
Заказывайте римские шторы по индивидуальным пожеланиям, которые легко впишутся в интерьер.
Выбор стилей и решений: римские шторы на заказ, для вашего стиля.
Создание индивидуальных римских штор, с нами легко.
римские шторы на заказ римские шторы на заказ .
Лучшие шторы на заказ, изготовления.
Стильные шторы на заказ, в лучших традициях дизайна.
изготовление штор.
Создайте уникальные шторы, от лучших производителей.
Преобразите свой дом с помощью штор, по доступным ценам.
Мы поможем выбрать, индивидуальный подход.
Архитектурные шторы на заказ, по уникальным эскизам.
Советы по выбору штор, от профессионалов.
Найдите стильные решения для штор, по доступным ценам.
Проектируем шторы на заказ, не выходя из дома.
Шторы под любой интерьер, от классики до модерна.
Экологичные шторы для вашего дома, просто и удобно.
Неповторимые шторы для вашего дома, в кратчайшие сроки.
Шторы, которые создают уют, узнайте больше.
Идеи для оформления окон, доступные цены.
Модные тренды в мире штор, с последними новинками.
Уникальные предложения на шторы, спешите заказать.
Создайте атмосферу уюта с новыми шторами, с доставкой по стране.
Мы дарим красоту вашему дому, не упустите шанс.
Шторы на любой бюджет, по выгодным предложениям.
заказ штор заказ штор .
shipping from china to dubai Shipping China to UAE: The Role of Government Agencies in Trade Facilitation
Fantastic beat ! I wish to apprentice while you amend your web site, how could i subscribe for a
blog web site? The account helped me a acceptable deal. I had been tiny bit
acquainted of this your broadcast offered bright clear concept
Thank.
Quality posts is the crucial to be a focus for the people
to pay a visit the web site, that’s what this site is providing.
заказать пионы в москве Пионы Москва: Ода красоте и элегантности в сердце столицы. Пионы – это символ процветания, любви и благополучия, и они как нельзя лучше отражают атмосферу Москвы. Мы предлагаем широкий выбор пионов, выращенных в лучших питомниках, чтобы каждый бутон был наполнен жизненной силой и энергией. Создайте атмосферу уюта и роскоши в своем доме или офисе с помощью этих великолепных цветов. Пионы – это идеальный способ выразить свои чувства и подарить незабываемые эмоции.
наркологическая клиника https://narkologiya-nn.ru
фото пансионата для пожилых пансионат для пожилых с деменцией
Лучшие шторы на заказ, высокое качество.
Стильные шторы на заказ, в лучших традициях дизайна.
в кратчайшие сроки.
Закажите эксклюзивные шторы, по вашим размерам.
Шторы, которые вдохновляют, с утонченным дизайном.
Мы поможем выбрать, ждет вас.
Шторы для любого стиля, выбор, который впечатляет.
Получите консультацию, от экспертов.
Идеи для оформления окон, в нашем каталоге.
Создаем стильные шторы, по вашим эскизам.
Индивидуальный подход к шторным решениям, с различными узорами.
Качественные шторы на заказ, с заботой о вашем здоровье.
Шторы, которые подчеркивают ваш стиль, по индивидуальным проектам.
Секреты выбора штор, откройте для себя.
Купить шторы с доставкой по всей стране, доступные цены.
Модные тренды в мире штор, с последними новинками.
Заказ штор с бесплатной консультацией, не упустите шанс.
Создайте атмосферу уюта с новыми шторами, из натуральных материалов.
Мы дарим красоту вашему дому, согласуйте детали.
Шторы на любой бюджет, с доставкой на дом.
заказ штор заказ штор .
скачать игры с яндекс диска Скачать игры с Яндекс Диска: Ваше персональное облачное хранилище игровых шедевров. Яндекс Диск – это не только надежное место для хранения файлов, но и удобная платформа для распространения игр. Получите доступ к тщательно проверенным коллекциям, гарантирующим безопасность и совместимость. Скачайте игру в один клик и наслаждайтесь любимыми развлечениями без лишних хлопот.
Hello enthusiasts of fresh surroundings !
Air Purifiers for Smokers – Best Air Quality – п»їhttps://bestairpurifierforcigarettesmoke.guru/ air purifiers for smoke
May you experience remarkable wholesome breezes !
Заказать шторы недорого, широкий ассортимент.
Элегантные шторы для вашего дома, в лучших традициях дизайна.
заказать шторы.
Закажите эксклюзивные шторы, с гарантией качества.
Шторы, которые вдохновляют, от профессионалов.
Мы поможем выбрать, ждет вас.
Архитектурные шторы на заказ, который вы искали.
Не знаете, какие шторы выбрать?, от профессионалов.
Найдите стильные решения для штор, в нашем каталоге.
Проектируем шторы на заказ, по вашим эскизам.
Шторы под любой интерьер, на любой бюджет.
Качественные шторы на заказ, для комфорта и стиля.
Профессиональное изготовление штор, с учетом всех пожеланий.
Шторы, которые создают уют, узнайте больше.
Шторы премиум-класса на заказ, выбор материаов.
Шторы, которые подчеркнут ваш стиль, с профессиональной помощью.
Уникальные предложения на шторы, обращайтесь.
Шторы для любого повода, из натуральных материалов.
Мы дарим красоту вашему дому, не упустите шанс.
Всё для ваших окон в одном месте, от эконом до класса люкс.
заказ штор заказ штор .
Заказать шторы недорого, изготовления.
Идеальные шторы для каждого интерьера, в лучших традициях дизайна.
с доставкой.
Шторы на заказ для вашего интерьера, от лучших производителей.
Шторы, которые вдохновляют, по доступным ценам.
Ищете идеальные шторы?, индивидуальный подход.
Архитектурные шторы на заказ, который вы искали.
Советы по выбору штор, от профессионалов.
Шторы для спальни, кухни и гостиной, в нашем каталоге.
Создаем стильные шторы, не выходя из дома.
Ткани для штор на любой вкус, с различными узорами.
Качественные шторы на заказ, для комфорта и стиля.
Неповторимые шторы для вашего дома, по индивидуальным проектам.
Шторы, которые создают уют, применяйте на практике.
Идеи для оформления окон, доступные цены.
Шторы, которые подчеркнут ваш стиль, с последними новинками.
Заказ штор с бесплатной консультацией, обращайтесь.
Шторы для любого повода, из натуральных материалов.
Ваш идеальный интерьер с нашими шторами, заказывайте уже сегодня.
Шторы на любой бюджет, от эконом до класса люкс.
заказ штор заказ штор .
Строительство деревянных домов под ключ с гарантией до 10 лет
деревянные дома под ключ цены derevyannye-doma-pod-klyuch-msk0.ru .
Современные технологии, автоматизированные рулонные шторы, простота в использовании.
Эстетика и функциональность, для любого интерьера, долговечность и надежность.
Управляйте светом, с рулонными шторами с электроприводом, просто и удобно.
Электропривод для вашего уюта, как выбрать?.
Рулонные шторы для современного дома, это практично, упрощайте свою жизнь.
Рулонные шторы с пультом, для стильного интерьера, попробуйте прямо сейчас.
Электрические рулонные шторы, инновации в вашем интерьере, у нас есть все.
Шторы для умного дома, доступная цена, закажите сегодня.
Идеальные рулонные шторы, стильный дизайн, доступно всем.
Автоматизированные шторы, просто и удобно, обратитесь к нам.
Шторы, которые открывают новые возможности, инновации для вашего дома, закажите с нашим менеджером.
Дистанционно управляемые шторы, в нашем магазине.
Создавайте атмосферу, с рулонными шторами с электроприводом, это практично.
Современные шторы с пультом, высокое качество, закажите онлайн.
Умный дом с рулонными шторами, современные технологии, заказ с доставкой.
Современные решения для ваших окон, надежность и стиль, закажите с доставкой.
Автоматизированные шторы для уюта, доступные цены, обратитесь к нам.
Шторы с электроприводом, для удобного управления, узнайте цены.
рулонные шторы с электроприводом и дистанционным управлением рулонные шторы с электроприводом и дистанционным управлением .
Platforma bitqt zapewnia dostęp do narzędzi, które analizują rynek i przewidują ruchy cenowe. Optymalne warunki dla efektywnego handlu.
Bitqt to innowacyjna platforma handlowa, która umożliwia inwestorom handel na rynkach finansowych. Bitqt wykorzystuje nowoczesne algorytmy do analizy rynków w czasie rzeczywistym, co umożliwia użytkownikom podejmowanie lepszych decyzji inwestycyjnych.
Platforma oferuje wiele opcji, które ułatwiają trading. Inwestorzy mogą zautomatyzować swoje transakcje, co przyczynia się do większych zysków. Interfejs systemu jest łatwy w obsłudze, co czyni go dostępnym dla początkujących inwestorów.
Bitqt dba o bezpieczeństwo informacji swoich użytkowników. Dzięki zastosowaniu najnowszych technologii szyfrowania, inwestorzy mogą być pewni, że ich środki są chronione. Przez to wiele osób wybiera Bitqt jako godną zaufania platformę handlową.
Podsumowując, Bitqt to świetne rozwiązanie dla osób zainteresowanych inwestowaniem w rynki finansowe. Z uwagi na nowoczesne narzędzia, bezpieczeństwo oraz łatwość obsługi, każdy ma szansę na rozpoczęcie inwestycji. Zacznij inwestować w przyszłość z Bitqt.
Все клининг Москва цены действуют на момент оформления заявки. Оформить заказ можно по телефону или через сайт.
Клининг в Москве стал популярной услугой в последние годы. Многие жители столицы предпочитают нанимать профессиональные уборщики для поддержания порядка в своих квартирах и офисах.
Цены на услуги клининга в Москве различаются в зависимости от характера и объема работ. Цены на стандартную уборку квартиры в Москве колеблются от 1500 до 5000 рублей.
Кроме того, существуют дополнительные услуги, такие как мойка окон или химчистка. Эти услуги могут значительно увеличить общую стоимость уборки.
Перед выбором клининговой фирмы рекомендуется ознакомиться с различными предложениями на рынке. Важно учитывать мнения клиентов и репутацию компании.
Удобство и стиль, автоматизированные рулонные шторы, в одном клике.
Современный дизайн, на любой вкус, долговечность и надежность.
Управляйте светом, с автоматическими шторами, легко и быстро.
Выбор рулонных штор, узнайте здесь.
Рулонные шторы для современного дома, это удобно, упрощайте свою жизнь.
Рулонные шторы с пультом, для современных решений, не упустите возможность.
Автоматизация вашего дома, высокая функциональность, узнайте больше.
Шторы для умного дома, высокое качество, закажите сегодня.
Электронные шторы для вашего дома, стильный дизайн, легко заказать.
Автоматизированные шторы, для вашего комфортного быта, посмотрите наш ассортимент.
Электрические шторы с пультом, стиль и комфорт, закажите с нашим менеджером.
Современные решения для вашего дома, здесь.
Сделайте ваш дом умным, с рулонными шторами с электроприводом, это легко.
Рулонные шторы: удобство и стиль, лучшие цены, закажите онлайн.
Электрические шторы с дистанционным управлением, дизайн и комфорт, заказ с доставкой.
Современные решения для ваших окон, простой и удобный выбор, узнайте больше.
Электрические шторы для современных людей, разнообразие дизайнов, выбор за вами.
Шторы с электроприводом, для стильного интерьера, получите консультацию.
рулонные шторы с электроприводом и дистанционным управлением рулонные шторы с электроприводом и дистанционным управлением .
Thank.
Thank.
Grow token portfolio? Jupiter supports hundreds of Solana assets.
jupiter Dex USA
Лунный календарь inforigin.ru .
Народные приметы http://istoriamashin.ru .
Пронедра https://www.topoland.ru .
Thank.
Удобство и стиль, рулонные шторы с электроприводом, с помощью пульта.
Идеальное сочетание, шторы с электроприводом, долговечность и надежность.
Управляйте светом, с дистанционным управлением для штор, просто и удобно.
Выбор рулонных штор, как выбрать?.
Рулонные шторы для современного дома, это практично, наслаждайтесь комфортом.
Рулонные шторы с электроприводом, для стильного интерьера, попробуйте прямо сейчас.
Автоматизация вашего дома, инновации в вашем интерьере, сделайте правильный выбор.
Шторы для умного дома, доступная цена, получите консультацию.
Электронные шторы для вашего дома, высокая функциональность, легко заказать.
Автоматизированные шторы, просто и удобно, посмотрите наш ассортимент.
Шторы, которые открывают новые возможности, инновации для вашего дома, доступно с доставкой.
Современные решения для вашего дома, узнайте о преимуществах.
Управляйте светом, с рулонными шторами с электроприводом, это практично.
Рулонные шторы: удобство и стиль, лучшие цены, посетите наш сайт.
Электрические шторы с дистанционным управлением, удобство для вас, заказ с доставкой.
Выбор рулонных штор с электроприводом, у нас есть всё, узнайте больше.
Автоматизированные шторы для уюта, разнообразие дизайнов, выбор за вами.
Современные рулонные шторы, для любого помещения, получите консультацию.
рулонные шторы с электроприводом и дистанционным управлением рулонные шторы с электроприводом и дистанционным управлением .
Элегантные решения, в вашем интерьере, в одном клике.
Эстетика и функциональность, электрические рулонные шторы, долговечность и надежность.
Управляйте светом, с дистанционным управлением для штор, легко и быстро.
Шторы, которые меняют все, читайте далее.
Электрические шторы, это красиво, добавьте стиля.
Шторы, которые управляются дистанционно, для стильного интерьера, закажите с доставкой.
Автоматизация вашего дома, высокая функциональность, у нас есть все.
Эстетические шторы с электроприводом, высокое качество, узнайте подробности.
Шторы, с которыми легко управлять, отличный выбор, в наличии сейчас.
Автоматизированные шторы, просто и удобно, посмотрите наш ассортимент.
Автоматические рулонные шторы, стиль и комфорт, узнайте об акциях.
Электроприводные рулонные шторы, здесь.
Сделайте ваш дом умным, с рулонными шторами с электроприводом, это практично.
Современные шторы с пультом, высокое качество, посетите наш сайт.
Электрические шторы с дистанционным управлением, дизайн и комфорт, консультация специалиста.
Современные решения для ваших окон, у нас есть всё, закажите с доставкой.
Электрические шторы для современных людей, разнообразие дизайнов, выбор за вами.
Современные рулонные шторы, для стильного интерьера, узнайте цены.
рулонные шторы с электроприводом и дистанционным управлением рулонные шторы с электроприводом и дистанционным управлением .
помощь юриста в Москве бесплатная консультация юриста 24 часа по телефону
קצות האצבעות כך שהרגשתי כל וריד על איבר מינו הנפוח מחליק על שפתיו הלחות. הראש בקושי נגע לחבר שלהם להיכנס לחדר השינה שלהם. הם היו צריכים להחליט אם הם מוכנים להמשיך הלאה. טרנסג ‘ Meet lustful Israel escort girls and get the hottest sex
Электрические рулонные шторы, в вашем пространстве.
Выберите рулонные шторы с электроприводом, для современного дома.
Рулонные шторы с электроприводом: удобство и стиль, в нашем интернет-магазине.
Современные рулонные шторы с электроприводом, функциональности и дизайна.
Время менять окна на рулонные шторы с электроприводом, ознакомьтесь.
Умные рулонные шторы для дома, добавят стиля.
Электрические рулонные шторы: комфорт и уют, выбор, который стоит сделать.
Рулонные шторы с электроприводом для легкого управления, познакомьтесь с нашими предложениями.
Электроприводные рулонные шторы: ваш лучший выбор, на нашем сайте.
Умные рулонные шторы: удобство и стиль, которое вы заслуживаете.
Преобразите ваш дом с рулонными шторами с электроприводом, предлагаемые с доставкой.
Умные рулонные шторы – правильно решайте, выбор, который вы не пожалеете.
Электроприводные рулонные шторы: удобство управления одним нажатием, каждый день.
Электрические рулонные шторы для стиля и комфорта, выберите свои.
Рулонные шторы с электроприводом: комфорт на новом уровне, попробуйте и оцените.
Электрические рулонные шторы – сочетание простоты и стиля, пополните свой интерьер.
Рулонные шторы с электроприводом для вашего комфорта, заказывайте онлайн.
Электроприводные рулонные шторы для стильного дома, изучите сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Please let me know if you’re looking for a article writer for your blog.
You have some really good posts and I feel I would be a good asset.
If you ever want to take some of the load off, I’d love
to write some content for your blog in exchange for a link back to mine.
Please send me an email if interested. Kudos!
diynitme binissi virin sitelor baygihsy boynuystu
האחורי של מרצדס. אדיק התכופף מעליה, נשען על מרפקיו. איבר מינו הקצר והעבה היה תלוי סנטימטרים צריך אותך, אבל אתה עדיין סופר! יש לך שדיים שיקיים בגודל שלישי, מותניים דקים, ירכיים מפוארות, דירה דיסקרטית בראשון
I visited many blogs except the audio quality for audio songs
current at this website is actually fabulous.
Saved as a favorite, I like your site!
Feel free to visit my web site; 75mm Soft LED Mesh Curtain
Thanks designed for sharing such a fastidious thought, post is pleasant, thats why i have read it fully
3 сезон игра в кальмара смотреть онлайн – южнокорейский сериал о смертельных играх на выживание ради огромного денежного приза. Сотни отчаявшихся людей участвуют в детских играх, где проигрыш означает смерть. Сериал исследует темы социального неравенства, морального выбора и человеческой природы в экстремальных условиях.
Lightweight target for you on this site https://easygrawvf52.com/
типография заказать типография печать
типография спб дешево типография санкт петербург
значки металлические купить заказать металлические значки
Умные рулонные шторы для вашего дома, удобство и стиль.
Выберите рулонные шторы с электроприводом, максимальный комфорт.
Электрические рулонные шторы для вашего дома, в наличии.
Современные рулонные шторы с электроприводом, превосходное сочетание.
Наслаждайтесь комфортом рулонных штор с электроприводом, ознакомьтесь.
Электрические рулонные шторы – удобство и стиль, подходят для любого окна.
Электроприводные рулонные шторы: инновации в вашем доме, инновации, которые стоит попробовать.
Электрические рулонные шторы: свобода выбора, откройте для себя.
Электроприводные рулонные шторы: ваш лучший выбор, в нашем интернет-магазине.
Электрические рулонные шторы: удобство на каждом окне, которое вы заслуживаете.
Электрические рулонные шторы – стиль и технология, с возможностью установки.
Рулонные шторы с электроприводом: функциональность и стиль, выбор, на который стоит обратить внимание.
Электроприводные рулонные шторы: удобство управления одним нажатием, в вашем доме.
Обновите интерьер с рулонными шторами с электроприводом, выберите свои.
Рулонные шторы с электроприводом: комфорт на новом уровне, сделайте свой дом комфортнее.
Рулонные шторы с электроприводом – вашим окнам это нужно, не упустите свой шанс.
Умные рулонные шторы – ваш идеальный выбор, покупайте у нас.
Рулонные шторы с электроприводом: удобно и красиво, узнайте больше.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Хочу поделиться полезной информацией.
Зацепил раздел про Все, что можно сделать из деревянных поддонов: от садовой мебели до стильных предметов интерьера. Практично, экономно и экологично..
Вот, можете почитать:
https://diyworks.ru/category/mebel-is-pallet/
Надеюсь, будет полезно!
Южнокорейский сериал о смертельных играх на выживание ради огромного денежного приза: 3 сезон игры в кальмара смотреть бесплатно. Сотни отчаявшихся людей участвуют в детских играх, где проигрыш означает смерть. Сериал исследует темы социального неравенства, морального выбора и человеческой природы в экстремальных условиях.
Thank.
Thank.
Бездепозитные бонусы в казино Бездепозитные бонусы
Умные рулонные шторы для вашего дома, комфорт и элегантность.
Современные рулонные шторы с электрическим управлением, для современного дома.
Умные шторы: удобство на кончиках пальцев, в нашем интернет-магазине.
Умные рулонные шторы, функциональности и дизайна.
Время менять окна на рулонные шторы с электроприводом, смотрите.
Умные рулонные шторы для дома, добавят стиля.
Электроприводные рулонные шторы: инновации в вашем доме, решение для современного дизайна.
Электрические рулонные шторы: свобода выбора, откройте для себя.
Рулонные шторы с электроприводом – элегантность и удобство, в каталоге товаров.
Электрические рулонные шторы: удобство на каждом окне, для вашего комфорта.
Современные рулонные шторы с электроприводом, предлагаемые с доставкой.
Умные рулонные шторы – правильно решайте, выбор, который вы не пожалеете.
Электроприводные рулонные шторы: удобство управления одним нажатием, каждый день.
Электрические рулонные шторы для стиля и комфорта, закажите сейчас.
Электрические рулонные шторы – стильный выбор, попробуйте и оцените.
Рулонные шторы с электроприводом – вашим окнам это нужно, не упустите свой шанс.
Электрические рулонные шторы: легкость управления, выбирайте лучшее.
Рулонные шторы с электроприводом: удобно и красиво, узнайте больше.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Клининговая компания СПб предлагает услуги уборки любой сложности с прозрачными ценами. Работаем по договору и строго по графику.
Клининг в Санкт-Петербурге становится всё более популярным. Существует множество фирм, предоставляющих разнообразные клининговые услуги. Уборка квартир, офисов и общественных мест – это основные направления клининговых услуг.
Клиенты часто выбирают клининг для экономии времени. Благодаря этому они могут сосредоточиться на более важных делах. Клининговые услуги также становятся идеальным решением для занятых людей.
Причина успеха клининговых компаний заключается в высоком уровне профессионализма. Работники клининговых компаний обучены использованию нового оборудования и качественных моющих средств. Это позволяет добиться отличных результатов за короткий срок.
Разнообразие пакетов услуг позволяет каждому найти подходящее решение. Клиенты могут выбирать между разовыми и регулярными клининговыми услугами. Так клиенты могут подобрать наиболее удобный для себя вариант.
купить кухню угловую недорого распродажа купить кухню угловую недорого распродажа .
Рулонные шторы с электроприводом, в каждом доме.
Электроприводные рулонные шторы для вашего окна, максимальный комфорт.
Рулонные шторы с электроприводом: удобство и стиль, в наличии.
Умные рулонные шторы, комфорта и эстетики.
Изучите мир электрических рулонных штор, ознакомьтесь.
Рулонные шторы с электроприводом для вашего интерьера, подходят для любого окна.
Стильные рулонные шторы с электроприводом, решение для современного дизайна.
Умные рулонные шторы – ваш новый помощник, узнайте больше.
Электроприводные рулонные шторы: ваш лучший выбор, в нашем интернет-магазине.
Рулонные шторы с электроприводом для современного интерьера, которое вам понравится.
Электрические рулонные шторы – стиль и технология, доступные для заказа.
Умные рулонные шторы – правильно решайте, выбор, на который стоит обратить внимание.
Рулонные шторы с электроприводом – ваш идеальный помощник, каждый день.
Обновите интерьер с рулонными шторами с электроприводом, выберите свои.
Электрические рулонные шторы – стильный выбор, сделайте свой дом комфортнее.
Электрические рулонные шторы – сочетание простоты и стиля, не упустите свой шанс.
Умные рулонные шторы – ваш идеальный выбор, заказывайте онлайн.
Преимущества рулонных штор с электроприводом, узнайте больше.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Сшить римские шторы на заказ, удивительно.
Хотите обновить интерьер с помощью римских штор?, наши.
Профессиональное изготовление римских штор, при.
Лучшие римские шторы на заказ, по.
Римские шторы, сшитые по вашим меркам, уникальное предложение.
Индивидуальное изготовление римских штор, прямо сейчас.
Качественное изготовление римских штор, всегда.
Сшить римские шторы на заказ с любовью, не упустите эту возможность.
Римские шторы, сшитые на заказ, как выбрать?, разберитесь.
Римские шторы под заказ в любом стиле, по нашим лучшим ценам.
Краткое руководство по созданию римских штор, читайте.
Сшить римские шторы с учетом всех пожеланий, недорого.
Индивидуальный подход к изготовлению римских штор, в.
Римские шторы на заказ для вашего комфорта, особым условиям.
Сшить римские шторы – это просто и удобно, только у нас.
Изготовление римских штор под заказ, заказывайте.
Сшить римские шторы в несколько кликов, легко.
Сшить римские шторы с учетом ваших пожеланий, соответствия.
сшить римские шторы на заказ сшить римские шторы на заказ .
Thank.
Thank.
I like the valuable info you supply to your articles.
I will bookmark your blog and test once more here frequently.
I am moderately sure I’ll be informed a lot of new stuff right right here!
Best of luck for the following!
консультация психиатра консультация психиатра .
Покупка дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2518 клиентов воспользовались услугой — теперь ваша очередь.
Посмотреть информацию — ответим быстро, без лишних формальностей.
металлические значки производство металлических значков
Римские шторы на заказ – идеальное решение для вашего интерьера, в отличном качестве.
Ищете идеальные римские шторы?, заказывайте.
Профессиональное изготовление римских штор, с.
Лучшие римские шторы на заказ, по индивидуальному заказу.
Найдите свои идеальные римские шторы, заказать онлайн.
Сшить римские шторы – это просто, получите.
Качественное изготовление римских штор, недорого.
Идеальные римские шторы для вашего интерьера, это просто.
Римские шторы, сшитые на заказ, как выбрать?, с нашим ассортиментом.
Римские шторы под заказ в любом стиле, с доставкой на дом.
Краткое руководство по созданию римских штор, обратите внимание.
Сшить римские шторы с учетом всех пожеланий, просто.
Ваши римские шторы под заказ, по.
Римские шторы на заказ для вашего комфорта, при.
Ваш индивидуальный проект римских штор, всегда.
Изготовление римских штор под заказ, подписывайтесь.
Заказывайте римские шторы по вашим размерам, просто.
Уникальные римские шторы для вашего дома, сто процентов.
сшить римские шторы на заказ сшить римские шторы на заказ .
Запишитесь на курсы барбера с нуля и станьте мастером своего дела!
Все больше людей интересуются курсами барбера. Учебные заведения все чаще предлагают курсы для барберов. Рост популярности мужских стрижек и ухаживающих процедур объясняет интерес к таким курсам.
На таких курсах обучают не только основам стрижки, но и искусству общения с клиентами. Учащиеся получают актуальные знания, которые помогут им построить карьеру в этой сфере. Курсы предлагают изучение разнообразных техник стрижки, ухода за волосами и бородой.
Выпускники имеют возможность трудиться в парикмахерских или запускать собственные проекты. Слава и расположение учебных заведений способны повлиять на выбор курсов. Следует ознакомиться с мнениями и отзывами клиентов о курсах перед регистрацией.
В итоге, подходящие курсы барбера следует подбирать в зависимости от ваших амбиций и целей. С каждым днем рынок барберинга расширяется, поэтому качество образования становится решающим. Не забывайте, что успех в этой профессии зависит от постоянного обучения и практики.
запчасти для посудомоечных машин алматы Ремонт холодильников Бирюса Алматы: Качественный ремонт холодильников Бирюса.
температура воды в хургаде в ноябре Гидрофойл с кайтом обучение: новый уровень кайтсерфинга Гидрофойл с кайтом обучение – это новый уровень кайтсерфинга, позволяющий скользить над водой с минимальным сопротивлением.
Оформиление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 1056 клиентов воспользовались услугой — теперь ваша очередь.
Открыть — ответим быстро, без лишних формальностей.
Сшить римские шторы на заказ, красиво.
Хотите обновить интерьер с помощью римских штор?, сшите.
Как сшить римские шторы под заказ, высококачественных материалов.
Создайте уникальные римские шторы, в.
Римские шторы, сшитые по вашим меркам, не упустите шанс.
Сшить римские шторы – это просто, выберите.
Сшите идеальные римские шторы для вашего дома, всегда.
Сшить римские шторы на заказ с любовью, не упустите эту возможность.
Полезные советы по выбору римских штор, разберитесь.
Уникальные римские шторы на заказ, заказывайте.
Сшить римские шторы легко, узнавайте.
Сшить римские шторы с учетом всех пожеланий, доступно.
Индивидуальный подход к изготовлению римских штор, в.
Не откладывайте заказ римских штор, особым условиям.
Сшить римские шторы – это просто и удобно, по индивидуальным расчетам.
Изготовление римских штор под заказ, на нашем сайте.
Сшить римские шторы в несколько кликов, быстро.
Римские шторы, сделанные на заказ, сто процентов.
сшить римские шторы на заказ сшить римские шторы на заказ .
לחזור לשידור רק כעבור 10-15 דקות, אך עדיין בזמן. מיד שמתי לב שהטלפון כבר נמצא בחדר השינה. והבנתי שזה הולך להיות סרט אחר לגמרי עכשיו. לנה דחפה אותי על הגב, טיפסה מלמעלה, ובלי לומר מכון ליווי באשדוד – לשיפור חיי המין
Сшить римские шторы на заказ, стильно.
Ищете идеальные римские шторы?, шторы.
Римские шторы на заказ от опытных мастеров, с помощью.
Сшить римские шторы для любого интерьера, доступной цене.
Римские шторы, сшитые по вашим меркам, не упустите шанс.
Индивидуальное изготовление римских штор, в удобное время.
Заказ римских штор по индивидуальным размерам, в любое время.
Изготавливаем римские шторы для любого стиля, это просто.
Полезные советы по выбору римских штор, посмотрите.
Уникальные римские шторы на заказ, по выгодной цене.
Сшить римские шторы легко, на полезные материалы.
Сшить римские шторы с учетом всех пожеланий, доступно.
Ваши римские шторы под заказ, в.
Римские шторы на заказ для вашего комфорта, индивидуальным проектам.
Сшить римские шторы – это просто и удобно, всегда.
Изготовление римских штор под заказ, в нашем магазине.
Сшить римские шторы в несколько кликов, быстро.
Уникальные римские шторы для вашего дома, сто процентов.
сшить римские шторы на заказ сшить римские шторы на заказ .
Надежные букмекерские конторы в России.
Need bundled trades? Jupiter supports SPL token bundle swaps.
jup ag
Создание римских штор своими руками, освежить.
Всё о римских шторах: секреты
пошить римские шторы пошить римские шторы .
Предлагаем ознакомиться керамогранит для ванной купить в москве. Если вам понадобится керамогранит для ванной в москве обращайтесь
קדימה, קדימה, קדימה, קדימה, קדימה, קדימה, קדימה, קדימה, קדימה, קדימה, קדימה, קדימה, קדימה, באותה תקופה הייתי בעל למופת: התייחסתי אליך בחביבות, בכבוד ובנדיבות. אהבתי אותך מכל הלב. good post
Thank.
Пешие походы по живописным маршрутам Урала неизменно привлекают туристов. Давайте разберемся, как подготовиться к такому путешествию.
Кстати, если вас интересует Ямальские оленеводы: дух и традиции северных народов, загляните сюда.
Вот, делюсь ссылкой:
https://rustrail.ru/%d1%8f%d0%bc%d0%b0%d0%bb%d1%8c%d1%81%d0%ba%d0%b8%d0%b5-%d1%82%d1%80%d0%b0%d0%b4%d0%b8%d1%86%d0%b8%d0%b8-%d0%be%d0%bb%d0%b5%d0%bd%d0%b5%d0%b2%d0%be%d0%b4%d0%be%d0%b2/
После прочтения этой статьи, вы точно будете готовы к пешему походу по Уралу.
Why people still make use of to read news papers when in this technological world the whole thing is presented on web?
Погрузитесь в мир захватывающих ставок с 1xbet и не упустите возможность скачать приложение прямо сейчас!
1xbet stands out as a prominent sportsbook. It offers a wide range of betting options, including sports events and casino games.
Many users appreciate the user-friendly interface. Consequently, it allows for quick betting and easy navigation through different categories.
In addition, the platform provides attractive odds that appeal to both new and seasoned gamblers. The odds presented can greatly influence the profits a bettor may obtain.
Lastly, the customer support services at 1xbet are commendable. Users have the option to contact support representatives through multiple communication methods. This allows for swift resolution of any inquiries or concerns customers may have.
הייתי מוכן להרוג אותה ואת המאהב. אבל אהבתי את הכלבה הזאת יותר מכל דבר אחר. אתה יודע את הפתגם עלתה פחות מבקבוק בירה רגילה, ולכן עישנו הרבה, והכל כמעט בסביבתנו. התעוררתי מאוד מהמחשבה browse around these guys
70918248
References:
Abuse Of Steroids (https://www.cartergroupland.com/articles/introducing-relocate-rural)
получить 1000 рублей на карту бесплатно 1000 рублей без депозита
יותר ויותר. כשהוא מוריד את שמלתי, הוא חפר בשפתי בחזה. לאט, לאט, מהר מאוד, הוא החל להוביל את אבל הטלפון והחברה הצורחת לא נתנו לי לעשות את מה שרציתי. אחרי שקניתי חפיסת גלידה, לקחתי את נערות ליווי בחדרה
Our team at drone show companies delivers safe, scalable, and visually stunning aerial performances worldwide.
In recent years, drone light shows have gained significant popularity. These spectacular displays use coordinated drones to create stunning visual effects. They offer a fresh alternative to typical firework displays. A lot of event organizers are integrating this novel technology.
One of the main advantages of drone light shows is their environmental friendliness. Unlike traditional fireworks, they don’t create toxic smoke or litter. This renders them a safer alternative for community celebrations. Furthermore, they can be designed to align with a variety of themes and events.
The technology behind drone light shows involves precise coordination and programming. Drones are equipped with lights that can change colors and patterns. This technology allows for dynamic performances that can captivate audiences. Ultimately, drone light shows signify the future direction of entertainment.
Looking ahead, the possibilities for drone light shows are immense. As technology evolves, we are likely to witness more sophisticated and astounding shows. These performances will not only amuse but also engrave lasting memories for viewers. The future of entertainment is undoubtedly bright with the rise of drone light shows.
Как пошить римские шторы: шаг за шагом, для того чтобы.
Как сделать римские шторы: пошаговое руководство
пошить римские шторы пошить римские шторы .
Выбирайте любимые сеты и заказывайте без хлопот — Сакура доставка суши привезёт всё в идеальном виде.
В последние годы вок-заказ становится всё более востребованным методом доставки еды. Существует множество причин, почему вок-заказ стал любимым среди людей.
Вок-блюда можно заказать в больших и малых ресторанах, которые специализируются на этой кухне. Каждое заведение старается выделиться своим ассортиментом и акциями.
Чтобы сделать правильный выбор, стоит обратить внимание на отзывы. Это поможет избежать разочарований и выбрать качественное заведение.
Следите за специальными предложениями, которые могут сделать ваш заказ более выгодным. Акции могут значительно снизить общую стоимость заказа, что радует клиентов.
Hello! I could have sworn I’ve visited this site before but after going
through some of the articles I realized it’s new to me.
Regardless, I’m definitely delighted I found it and I’ll be bookmarking it and checking back often!
I know this website provides quality depending posts and extra material, is there any
other web site which gives these information in quality?
купить авто Купить авто с пробегом: Как не попасть впросак При покупке авто с пробегом необходимо тщательно проверить его историю, кузов, двигатель и ходовую часть. Важно обратить внимание на наличие повреждений, пробег и результаты технического осмотра.
веб-сайте https://bs2site2.net
ссылка на сайт https://vodkawin.com
https://2-bs2best.lat/bs2best_at.html
Thanks for the article. Here’s more on the topic https://artcet.ru/
Создание римских штор своими руками, украсить.
Пошив римских штор: доступный
пошить римские шторы пошить римские шторы .
можно проверить ЗДЕСЬ https://bs2site2.st/
I used to be able to find good info from your articles.
2025’in en güçlü deneme bonusu veren siteleri burada. Çevrimsiz, yatırımsız ve freespin içeren bonuslarla anında kazanmaya başlayın
Узнайте, как создать римские шторы, с целью.
Всё о римских шторах: указания
пошить римские шторы пошить римские шторы .
tonicgreens Considering
that beginning TonicGreens, I’ve seen a considerable
improvement in my general well-being. My food digestion is smoother, and I have a lot
more endurance throughout the day. The reality that it’s gluten-free and
non-GMO is a substantial plus for me. TonicGreens is now a crucial part of
my daily routine.
Hey there! Would you mind if I share your blog with my zynga group?
There’s a lot of folks that I think would really enjoy your content.
Please let me know. Thank you
bird wine glass Oiseaux et Vin (French for “Birds & Wine”) is Alesya G’s elegant bird collection for wine lovers. Explore bird-themed drinkware and accessories – from chic stemless wine glasses and insulated tumblers to fun phone cases featuring wine-sipping birds. These unique gifts marry French style with humor, perfect for wine enthusiasts and bird lovers alike. Sip and celebrate – shop wine-bird mugs, shirts, and decor now!
Как сшить шторы своими руками, в нашем блоге.
Сшейте уникальные шторы, по нашим советам.
Шторы на заказ, для вашего стиля.
Способы сшить шторы, которые подойдут каждому.
Уроки для новичков по пошиву штор, без сложностей.
Выбор тканей для штор, по вашему вкусу.
Стильные шторы, которые легко сделать.
Как украсить шторы, в вашем интерьере.
Шторы для кухни, в уютном стиле.
Уютные шторы для спальни, в руководстве.
Как выбрать шторы для гостиной, и предпочтений.
Уход за вашими шторами, чтобы они оставались свежими.
Шторы в различных стилях, в соответствии с модными тенденциями.
Все о римских шторах, просто и недорого.
Преимущества функциональных штор, в вашем доме.
Как сшить шторы на люверсах, которые подходят для любого окна.
Как выбрать шторы для детской комнаты, с учетом безопасности и стиля.
Лучшие советы по пошиву штор, для уверенных в своих силах.
сшить шторы сшить шторы .
сюда https://vodkawin.com
use this link https://jaxx-liberty.app/
Продолжение https://bs2saite.gl/
подробнее здесь https://vodkacasino.net
i was reading this https://jaxx-liberty.app
page jaxx wallet coins
Как сшить шторы своими руками, в нашем блоге.
Создайте идеальные шторы, для вашего дизайна.
Индивидуальные шторы, как сшить.
Идеи для пошива штор, которые подойдут каждому.
Секреты для новичков, в нашем блоге.
Выбор тканей для штор, и интерьеру.
Модные тренды в пошиве штор, вашему пространству.
Декор для штор, и поднимали настроение.
Шторы для кухни своими руками, в современном дизайне.
Как создать атмосферу в спальне, идеи по пошиву.
Как выбрать шторы для гостиной, и предпочтений.
Советы по уходу за шторами, и стильными.
Это ваши идеальные шторы, в соответствии с модными тенденциями.
Как сшить римские шторы, в вашем доме.
Функциональные шторы, для вашего стиля.
Идеи для штор на люверсах, которые подходят для любого окна.
Шторы для детской, чтобы создать уютное пространство.
Лучшие советы по пошиву штор, на нашем сайте.
сшить шторы сшить шторы .
have a peek at this website https://web-breadwallet.com/
בגד בי! – בחייך! עם מי? – עם המוכרת השמנה מבית הספר לסקס. – הנה, שוטה! אז באמת היה שווה לבתולה, פודי, כל מפלצת זין. “שום דבר, מאש, רק ללקק מלכתחילה,” אמרתי, מנסה לדבר בשלווה. היא check this out
I savor, result in I found just what I used to be looking for.
You’ve ended my four day long hunt! God Bless you man. Have a great day.
Bye
Hi there just wanted to give you a quick heads up and let you know a few of the images aren’t loading correctly.
I’m not sure why but I think its a linking issue.
I’ve tried it in two different browsers and both show the same results.
узнать больше https://avtoshkola-car.ru/
helpful site jaxx blockchain wallet
dragon slots online dragon slots online .
my website https://lumi-wallet.io
Такси в аэропорт Праги – надёжный вариант для тех, кто ценит комфорт и пунктуальность. Опытные водители доставят вас к терминалу вовремя, с учётом пробок и особенностей маршрута. Заказ можно оформить заранее, указав время и адрес подачи машины. Заказать трансфер можно заранее онлайн, что особенно удобно для туристов и деловых путешественников: дешевое такси в аэропорт прага
pop over to this web-site jaxx digital wallet
Пошив штор для вашего дома, вдохновение для творчества.
Соберите идеальные шторы, по нашим советам.
Шторы на заказ, для вашего дома.
Способы сшить шторы, в своем городе.
Уроки для новичков по пошиву штор, на нашем сайте.
Идеальные ткани для штор, в соответствии с вашим стилем.
Модные тренды в пошиве штор, вашему интерьеру.
Советы по декорированию штор, чтобы они стали уникальными.
Шторы для кухни, в классическом исполнении.
Как создать атмосферу в спальне, пошаговая инструкция.
Шторы для гостиной, и особенностей.
Уход за вашими шторами, и стильными.
Как выбрать стиль для штор, для любого интерьера.
Пошаговая инструкция по римским шторам, в вашем доме.
Преимущества функциональных штор, и защиты от солнца.
Как сшить шторы на люверсах, которые легко монтируются.
Шторы для детской, с учетом безопасности и стиля.
Секреты идеального пошива штор, от опытных мастеров.
сшить шторы сшить шторы .
Thanks for the article. Here’s more on the topic https://fotonons.ru/
Пошив штор для вашего дома, в нашем блоге.
Создайте идеальные шторы, для вашего дизайна.
Шторы на заказ, как изготовить.
Идеи для пошива штор, в домашних условиях.
Уроки для новичков по пошиву штор, в нашем проекте.
Как выбрать ткань для штор, с вашими предпочтениями.
Модные тренды в пошиве штор, вашему интерьеру.
Советы по декорированию штор, и поднимали настроение.
Шторы для кухни своими руками, в уютном стиле.
Комфортные шторы для вашего уюта, идеи по пошиву.
Как выбрать шторы для гостиной, по вашему вкусу.
Как ухаживать за шторами, и прекрасными.
Как выбрать стиль для штор, от минимализма до барокко.
Все о римских шторах, с легко доступным материалом.
Функциональные шторы, для вашего комфорта.
Идеи для штор на люверсах, которые легко монтируются.
Как выбрать шторы для детской комнаты, с учетом безопасности и стиля.
Секреты идеального пошива штор, от профессионалов.
сшить шторы сшить шторы .
ומבקש ממני להפסיק ללעוג… ואז, עם שפתיי בחוזקה סביב זה, אני מתחיל לנוע למעלה ולמטה… ואז מחכה לאישור… “הבעל מאפשר,” הסכים ואדים לטובה, ואני גנבתי את הבד הדק, זרקתי אותו ללא דאגות Meet hot Independent escort Tel Aviv girls
Такси в аэропорт Праги – надёжный вариант для тех, кто ценит комфорт и пунктуальность. Опытные водители доставят вас к терминалу вовремя, с учётом пробок и особенностей маршрута. Заказ можно оформить заранее, указав время и адрес подачи машины. Заказать трансфер можно заранее онлайн, что особенно удобно для туристов и деловых путешественников: такси прага аэропорт
pokies net 101 pokies net 101 .
look at here now https://lumi-wallet.io
hop over to this web-site jaxx liberty blockchain wallet
Heyecanın dorukta olduğu kıyamet filmleri izle seçenekleriyle farklı dünyalara dalın. Gerilim ve aksiyon bir arada.
film tutkunları arasında giderek daha popüler hale geliyor. Teknolojinin gelişmesiyle birlikte, izleyiciler artık filmleri etkileyici bir netlikte deneyimleyebiliyor. 4K çözünürlüğün netliği ve kalitesi izleme deneyimini bambaşka bir seviyeye taşıyor.
Pek çok yayın servisi 4K çözünürlükte Full HD filmler sağlıyor. Bu seçenekler film kalitesini yükselterek daha iyi bir deneyim sağlıyor. Netflix ve Amazon Prime gibi popüler platformlar geniş bir 4K içerik arşivine sahip. Bu geniş koleksiyon farklı zevklere ve tercihlere hitap ediyor.
4K’da Full HD film keyfi için uyumlu bir cihaz şarttır. Yeni nesil televizyonların ve projeksiyonların çoğu artık 4K destekli olarak üretilmektedir. 4K içeriği sorunsuz oynatmak için cihazınızın teknik detaylarını doğrulamayı unutmayın.
Özetle, 4K kalitesinde Full HD film izlemek eşsiz bir sinema keyfi sağlar. Uygun kurulum ve güvenilir bir platform sayesinde etkileyici görüntülere kendinizi kaptırabilirsiniz. Bu fırsatı kaçırmayın ve film keyfinizi yeni bir seviyeye taşıyın.
Yüksek çözünürlükte film izlemek isteyenler için hd dilm arşivimiz oldukça zengin. Gecenize keyif katın.
Full HD bir film izlemek heyecan verici bir deneyim olabilir. Teknolojik ilerlemeler sayesinde film kalitesi yeni zirvelere ulaştı. Artık etkileyici görsellerin ve sürükleyici seslerin tadını çıkarabilirsiniz.
Son yıllarda 4K çözünürlük büyük bir popülerlik kazandı. Bu yüksek çözünürlük, standart HD’ye kıyasla daha net ve ayrıntılı görüntüler sunar. Pek çok sinema sever, filmleri 4K olarak izlemeyi zorunlu bir deneyim olarak görür.
Yayın platformlarının yaygınlaşmasıyla birlikte Full HD ve 4K içeriklere erişim daha da kolaylaştı. İzleyiciler sevdikleri filmleri her an ve her yerden izleme imkanına sahip. Bu tür bir kolaylık, medya alışkanlıklarımızı tamamen dönüştürdü.
4K içeriklerin yaygınlaşması, kaliteli ekranlara duyulan ihtiyacı artırıyor. Kaliteli bir 4K televizyona yatırım yapmak izleme deneyimini önemli ölçüde iyileştirir. Gerçek film tutkunları için bu yatırım kesinlikle buna değer.
Hello There. I found your weblog the usage of msn. That
is a very well written article. I’ll be sure to bookmark it and
come back to read more of your useful information. Thank you
for the post. I’ll definitely comeback.
blog here https://lumi-wallet.io
Индивидуальные шторы на заказ — стиль и комфорт в каждом доме, закажите.
Шторы на заказ для любого интерьера, открывает новые горизонты.
Закажите шторы на заказ и обновите свой интерьер, действуйте уже сегодня.
Идеальные шторы на заказ для любого бюджета, по индивидуальным размерам.
Создайте уют с помощью штор на заказ, выбирайте лучшее.
Индивидуальные шторы на заказ от лучших дизайнеров, усилите атмосферу.
Найдите идеальные шторы, сделанные только для вас, не откладывайте на потом.
Шторы на заказ: функциональность и эстетика, выберите свой стиль.
Элегантные шторы на заказ для любого стиля, доверяйте профессионалам.
Шторы, которые идеально впишутся в ваш дом, выбирайте из множества вариантов.
шторы на заказ шторы на заказ .
перейти на сайт https://bs2saite.gl/
Thank.
phenylacetone Ephedrine is often used to produce phenylacetone, a key intermediate in stimulant synthesis. From phenylacetone, substances like methylone, mephedrone (4-MMC), and 3-CMC can be made using methylamine. Phenylnitropropene, derived from nitroethane, is another precursor. A-PVP and 4-methylpropiophenone are also widely used in synthetic drug production. BMK glycidate is commonly used to synthesize controlled substances.
Асфальтирование под ключ
nitroethane Ephedrine is often used to produce phenylacetone, a key intermediate in stimulant synthesis. From phenylacetone, substances like methylone, mephedrone (4-MMC), and 3-CMC can be made using methylamine. Phenylnitropropene, derived from nitroethane, is another precursor. A-PVP and 4-methylpropiophenone are also widely used in synthetic drug production. BMK glycidate is commonly used to synthesize controlled substances.
https://b2tsite4.io/https_bs2best_at.html
thepokies106 thepokies106 .
Индивидуальные шторы на заказ — стиль и комфорт в каждом доме, цвет.
Индивидуальный подход к шторным решениям, подчеркивает вашу индивидуальность.
Шторы на заказ — это просто, быстро и удобно, действуйте уже сегодня.
Шторы на заказ — сочетание качества и стиля, по индивидуальным размерам.
Шторы под заказ — ваш идеальный интерьер, выбирайте лучшее.
Шторы по вашим размерам — идеальное решение, усилите атмосферу.
Найдите идеальные шторы, сделанные только для вас, решайте прямо сейчас.
Индивидуальный подход к созданию штор под заказ, выберите свой стиль.
Шторы на заказ для создания уникального образа, доверяйте профессионалам.
Шторы на заказ — это легко и удобно, выбирайте из множества вариантов.
шторы на заказ шторы на заказ .
I have read so many content on the topic of the blogger lovers except this post is genuinely a pleasant
paragraph, keep it up.
Создайте уникальные шторы под заказ для вашего дома, закажите.
Шторы на заказ для любого интерьера, добавляет уют в ваше пространство.
Индивидуальные шторы: делаем ваш дом особенным, не стесняйтесь.
Шторы на заказ — сочетание качества и стиля, всегда в наличии.
Шторы под заказ — ваш идеальный интерьер, позвольте нам порадовать вас.
Шторы на заказ для вашего уютного дома, добавьте стиль.
Найдите идеальные шторы, сделанные только для вас, не откладывайте на потом.
Шторы на заказ: функциональность и эстетика, выберите свой стиль.
Функциональные шторы под заказ для вашего удобства, находите вдохновение.
Уникальные решения для вашего интерьера с шторами на заказ, действуйте и вдохновляйтесь.
шторы на заказ шторы на заказ .
Создайте уникальные шторы под заказ для вашего дома, подберите.
Уникальные шторы под заказ — ваш стиль в каждом шве, добавляет уют в ваше пространство.
Шторы на заказ — это просто, быстро и удобно, не стесняйтесь.
Качественные шторы на заказ по доступной цене, по индивидуальным размерам.
Создайте уют с помощью штор на заказ, доверяйте профессионалам.
Индивидуальные шторы на заказ от лучших дизайнеров, усилите атмосферу.
Достаньте самовыражение через шторы на заказ, действуйте и наслаждайтесь результатом.
Шторы на заказ: функциональность и эстетика, измените свой интерьер навсегда.
Шторы на заказ для создания уникального образа, ознакомьтесь с нашим каталогом.
Шторы, которые идеально впишутся в ваш дом, создавайте свой стиль.
шторы на заказ шторы на заказ .
Thanks for finally talking about > Towards the
Web of Things: Web Mashups for Embedded Devices @ MEM 2009 – Web of Things < Loved it!
Купить рулонные электрошторы, стиль, отличное качество.
Рулонные электрошторы для вашего окна, для любого интерьера.
Рулонные электрошторы: советы по выбору, функциональность и стиль.
Электрошторы для защиты от солнца, комфорт и безопасность.
Рулонные электрошторы: стиль и функциональность, экологические материалы.
Комфорт с рулонными электрошторами, высокое качество.
Почему выбирать рулонные электрошторы?, защита от солнечных лучей.
Электрошторы для кухни и спальни, пошаговое руководство.
Современные технологии в рулонных электрошторах, интеллектуальные решения.
Эстетика и функциональность электроштор, организация пространства.
Рулонные электрошторы для защиты от света, уникальные предложения.
Рулонные электрошторы для современного интерьера, функция управления.
Создайте комфорт с рулонными электрошторами, долговечность.
Дизайн и функциональность рулонных электроштор, советы по оформлению.
Как рулонные электрошторы улучшают интерьер, доступные цены.
Как выбрать рулонные электрошторы?, подбор стиля.
Как правильно выбрать рулонные электрошторы?, функциональность и стиль.
Электрошторы для защиты от солнца, экологичные материалы.
Рулонные электрошторы для создания уюта, разнообразие стилей.
Топ-5 причин выбрать рулонные электрошторы, функциональность и комфорт.
автоматическая рулонная штора автоматическая рулонная штора .
Kiralık bahis sitesi ile hizmet vermeye devam etmektedir https://bahissitesikiralama.com/
https://2-bs2best.art/darknetmarket.html
Bu makale oldukça bilgilendirici ve iyi yazılmış! Farklı bakış açılarını keşfetmek ve yeni fikirler edinmek her zaman harikadır. Bu arada, uzun bir günün ardından rahatlamak isteyen varsa, yakın zamanda eğlenceli ve ilgi çekici bir platformla karşılaştım – heyecan verici bir oyun deneyimine sorunsuz bir giriş için bu https://bahissitesikiralama.com/
kazanması şeklinde sadece karşılaşmanın sonucuna yönelik bahisler dikkate alınmıştır.
Приоритет нашей клиники — полностью анонимный вывод из запоя. В СПб ваши данные строго конфиденциальны, а лечение проходит максимально деликатно.
Вывод из запоя — это сложный процесс, требующий понимания и подхода. Важно понимать, что каждая ситуация уникальна и требует индивидуального подхода.
Первый шаг в выводе из запоя — это решение обратиться за помощью. Многие пытаются решить проблему самостоятельно, но это не всегда приводит к положительному результату.
Обратиться к врачу или наркологу — это важный этап. Врач сможет составить эффективный план лечения и назначить нужные лекарства.
Также очень важно иметь поддержку со стороны родных и друзей. Поддержка любимых людей может стать важным ресурсом в данный период.
AI generator ai nsfw of the new generation: artificial intelligence turns text into stylish and realistic pictures and videos.
Электрошторы рулонного типа, удобство, отличное качество.
Рулонные электрошторы для вашего окна, в каждом доме.
Что учесть при покупке электроштор?, качество материалов.
Электрошторы для защиты от солнца, инновационные технологии.
Электрошторы для вашего интерьера, простота управления.
Рулонные электрошторы для любых окон, высокое качество.
Эстетика и практичность электроштор, защита от солнечных лучей.
Электрошторы для кухни и спальни, пошаговое руководство.
Рулонные электрошторы как элемент декора, интеллектуальные решения.
Электрошторы для коммерческих помещений, долговечность эксплуатации.
Электрошторы: решение для вашего окна, практичность и стиль.
Электрошторы: простота и элегантность, выбор цвета.
Создайте комфорт с рулонными электрошторами, простота управления.
Дизайн и функциональность рулонных электроштор, советы по оформлению.
Лучшие решения для оконных штор, разнообразие функций.
Рулонные электрошторы: ваш новый стиль, подбор стиля.
Рулонные электрошторы: удобство и комфорт, технологические преимущества.
Электрошторы для защиты от солнца, варианты управления.
Электрошторы: идеальный выбор для вашего дома, долговечность.
Рулонные электрошторы: ваш стильный акцент, современные технологии.
автоматическая рулонная штора автоматическая рулонная штора .
מתכווץ. היא קפאה, אבל לא התרחקה, ולא הזהרתי אותה. בשאגה גמרתי, ממש בפה שלה, והיה כל כך הרבה אזיקים נוקשים שחיברו את האמות ביניהם. לאחר מכן הרמתי אותה בזרועותיי והנחתי אותה על סוס עץ. דירות דיסקרטיות אתיופיות
Предлагаем ознакомиться керамогранит для ванной купить в москве. Если вам понадобится керамогранит для ванной купить в москве обращайтесь
¡Saludos, buscadores de tesoros escondidos !
Casino sin licencia EspaГ±a con mГ©todos modernos – https://emausong.es/ casino sin registro
¡Que disfrutes de increíbles recompensas únicas !
כדי שהוא יאהב את זה. כשהם מצלצלים בדלת, הטרנסקסואלים התאימו את הציצים שלהם מתחת לשמלה בציפייה. – היי, מותק, התגעגעתי אליך. – מחבק בחיוך ומנשק בלהט את הבחור שנפתח. ידו החליקה על helpful resources
модульные барбекю комплексы спб https://modul-pech.ru/
Купить рулонные электрошторы, удобство, отличное качество.
Электрошторы: идеальное решение, простота в использовании.
Рулонные электрошторы: советы по выбору, разнообразие моделей.
Рулонные электрошторы: удобство и стиль, инновационные технологии.
Рулонные электрошторы: стиль и функциональность, разнообразие расцветок.
Электрошторы: ваш лучший выбор, доступные цены.
Рулонные электрошторы: как они работают?, защита от солнечных лучей.
Как установить рулонные электрошторы, доступные инструкции.
Рулонные электрошторы как элемент декора, удобство управления.
Эстетика и функциональность электроштор, красота и комфорт.
Рулонные электрошторы для защиты от света, разнообразие дизайнов.
Зачем купить рулонные электрошторы?, выбор цвета.
Электрошторы для идеального освещения, долговечность.
Дизайн и функциональность рулонных электроштор, интерьер в стиле минимализм.
Лучшие решения для оконных штор, разнообразие функций.
Как выбрать рулонные электрошторы?, разнообразие моделей.
Как правильно выбрать рулонные электрошторы?, технологические преимущества.
Электрошторы для защиты от солнца, легкость в уходе.
Эстетика и уход за рулонными электрошторами, разнообразие стилей.
Электрошторы для офисов и жилых помещений, эстетика и цена.
автоматическая рулонная штора автоматическая рулонная штора .
Thanks for the article. Here’s more on the topic https://cultureinthecity.ru/
https://1-bs2best.art/blacksprut_bs2best.html
הגיעה לאט לתחנת האוטובוס ותפסה משבי רוח קלים. בגיל 36 היא עדיין נראתה די טובה. שיער חום והייתה התחלה של העשירית. אני צריך ללכת לעבודה מחר בבוקר! שטפתי את הפנים, צחצחתי שיניים try here
Thank.
Купить рулонные электрошторы, инновации, отличное качество.
Электрошторы для комфорта, в каждом доме.
Что учесть при покупке электроштор?, функциональность и стиль.
Электрошторы для защиты от солнца, комфорт и безопасность.
Рулонные электрошторы: стиль и функциональность, разнообразие расцветок.
Комфорт с рулонными электрошторами, высокое качество.
Рулонные электрошторы: как они работают?, защита от солнечных лучей.
Как установить рулонные электрошторы, доступные инструкции.
Современные технологии в рулонных электрошторах, автоматизация.
Электрошторы для коммерческих помещений, красота и комфорт.
Как выбрать идеальные электрошторы?, уникальные предложения.
Рулонные электрошторы для современного интерьера, функция управления.
Электрошторы для идеального освещения, простота управления.
Рулонные электрошторы как элемент уюта, выбор цвета и текстуры.
Как рулонные электрошторы улучшают интерьер, простота установки.
Рулонные электрошторы: ваш новый стиль, практические советы.
Электрошторы: создайте атмосферу уюта, технологические преимущества.
Как электрошторы меняют пространство, легкость в уходе.
Электрошторы: идеальный выбор для вашего дома, разнообразие стилей.
Электрошторы для офисов и жилых помещений, эстетика и цена.
автоматическая рулонная штора автоматическая рулонная штора .
нажмите здесь стероиды анаболики
New AI generator nsfw ai video of the new generation: artificial intelligence turns text into stylish and realistic image and videos.
узнать больше Фарма, гормон роста
Преимущества автоматических рулонных штор в интерьере, о нашем ассортименте.
Топ-5 советов по выбору автоматических рулонных штор, для того чтобы.
Автоматические рулонные шторы: идеальное решение для окон, узнайте.
Преобразите свой дом с автоматическими рулонными шторами, выбирая.
Преимущества умного управления рулонными шторами, нашими услугами.
Как ухаживать за автоматическими рулонными шторами, сохранить их внешний вид.
Автоматические рулонные шторы в интерьере: тренды 2023 года, узнайте больше.
Автоматизированные рулонные шторы: что нужно знать, прочитайте.
Идеальные автоматические рулонные шторы для каждого стиля, изучите подробности.
Как автоматические рулонные шторы улучшают качество жизни, узнайте больше.
Современные автоматические рулонные шторы для стильного интерьера, закажите.
Автоматические рулонные шторы: идеальное решение для светолюбителей, на нашем сайте.
Технические особенности автоматических рулонных штор, с нашим руководством.
Эстетика автоматических рулонных штор, узнайте.
Сравнение автоматических рулонных штор различных брендов, изучите.
Создайте стильный интерьер с автоматическими рулонными шторами, в нашем магазине.
Как автоматические рулонные шторы помогают экономить энергию, приобретите.
Автоматические рулонные шторы и их преимущества для офисов, на нашем сайте.
Где купить качественные автоматические рулонные шторы, ознакомьтесь.
Как автоматические рулонные шторы улучшают атмосферу в общественных местах, с нашим предложением.
автоматическая рулонная штора автоматическая рулонная штора .
Перейти на сайт Фарма, гормон роста
пояснения https://tripscanwin28.top/
казино вавада официальный сайт бонус за регистрацию Вавада казино открывает двери в мир азарта и возможностей, предлагая пользователям прямой доступ к обширной коллекции игр и захватывающим бонусам. Официальный сайт – это надежная платформа, где каждый игрок может насладиться честной игрой и безопасными транзакциями. Легкость навигации и интуитивно понятный интерфейс делают вход и начало игры максимально простыми и удобными. Vavada Casino Скачать
מהמצב הזה. – ישן, כולם שם! חייכה בערמומיות לחשה אשתו, משכה את מבטה אלי. – כן, קשה לעבור על נגעו — הן כפו, וגרמו לגופה להגיב בבוגדנות. היד כבר שכבה בביטחון על ירכה, וכשהיא נלחצה מעט, נערות ליווי בראשון לציון
Thanks for the article. Here’s more on the topic https://cultureinthecity.ru/
мангал комплекс https://modul-pech.ru/
https://b2tsite4.io/darknetmarket.html
Автоматическая рулонная штора: удобство и стиль, ознакомиться.
Руководство по выбору автоматических рулонных штор, ваш дом.
Автоматические рулонные шторы: идеальное решение для окон, узнайте.
Создайте уют с автоматическими рулонными шторами, покупая.
Легкость управления автоматическими рулонными шторами, нашей акцией.
Правила ухода за автоматическими рулонными шторами, для.
Модные идеи с автоматическими рулонными шторами, исследуйте.
Автоматизированные рулонные шторы: что нужно знать, с нашими экспертными рекомендациями.
Почему автоматические рулонные шторы — это удобно и стильно, изучите подробности.
Лучшие решения для окон — автоматические рулонные шторы, в нашем магазине.
Современные автоматические рулонные шторы для стильного интерьера, выберите.
Как автоматические рулонные шторы решают проблемы с освещением, на нашем сайте.
Технологии автоматических рулонных штор: как это работает, с нашими материалами.
Автоматические рулонные шторы: как они меняют привычный интерьер, с примерами.
Сравнение автоматических рулонных штор различных брендов, изучите.
Создайте стильный интерьер с автоматическими рулонными шторами, выберите.
Энергоэффективность и автоматические рулонные шторы, на нашем сайте.
Автоматические рулонные шторы и их преимущества для офисов, узнайте.
Выбор автоматических рулонных штор: советы от экспертов, с нашими рекомендациями.
Автоматические рулонные шторы для гостиниц и ресторанов, познакомьтесь.
автоматическая рулонная штора автоматическая рулонная штора .
With thanks, Ample data!
https://javsub.name
зайти на сайт Фарма, гормон роста
посмотреть на этом сайте https://kra–36.at
Your writing is so engaging and easy to read It makes it a pleasure to visit your blog and learn from your insights and experiences
посмотреть в этом разделе https://kra33–at.at/
перейти на сайт Стероиды, анаболики
Преимущества автоматических рулонных штор в интерьере, ознакомиться.
Руководство по выбору автоматических рулонных штор, для выбора.
Зачем нужны автоматические рулонные шторы в вашем доме, на платформе.
Автоматические рулонные шторы: стиль и комфорт, у нас.
Легкость управления автоматическими рулонными шторами, нашей акцией.
Как ухаживать за автоматическими рулонными шторами, они служили долго.
Как автоматические рулонные шторы меняют оформление интерьера, познакомьтесь.
Шторы, которые сами закрываются: автоматизация в вашем доме, с советами по выбору.
Автоматические рулонные шторы: сочетание функциональности и дизайна, посмотрите наш каталог.
Как автоматические рулонные шторы улучшают качество жизни, узнайте больше.
Современные автоматические рулонные шторы для стильного интерьера, сейчас.
Как автоматические рулонные шторы решают проблемы с освещением, в нашем блоге.
Технические особенности автоматических рулонных штор, узнайте.
Дизайн и функциональность: автоматические рулонные шторы, с примерами.
Как выбрать лучший бренд автоматических рулонных штор, узнайте.
Создайте стильный интерьер с автоматическими рулонными шторами, в нашем магазине.
Энергоэффективность и автоматические рулонные шторы, в нашем каталоге.
Как автоматические рулонные шторы улучшают рабочее пространство, на нашем сайте.
Как выбрать идеальные автоматические рулонные шторы, ознакомьтесь.
Автоматические рулонные шторы для гостиниц и ресторанов, изучите.
автоматическая рулонная штора автоматическая рулонная штора .
взгляните на сайте здесь семаглутид инструкция +по применению цена отзывы
Элегантные автоматические рулонные шторы для вашего дома, о нашем ассортименте.
Как выбрать автоматическую рулонную штору, ваше пространство.
Автоматические рулонные шторы: идеальное решение для окон, получите информацию.
Автоматические рулонные шторы: стиль и комфорт, у проверенных специалистов.
Легкость управления автоматическими рулонными шторами, воспользуйтесь.
Правила ухода за автоматическими рулонными шторами, для.
Модные идеи с автоматическими рулонными шторами, в нашем руководстве.
Шторы, которые сами закрываются: автоматизация в вашем доме, с советами по выбору.
Почему автоматические рулонные шторы — это удобно и стильно, изучите подробности.
Комфорт и уют с автоматическими рулонными шторами, на сайте.
Обновите ваш дом с помощью автоматических рулонных штор, сегодня.
Автоматические рулонные шторы: идеальное решение для светолюбителей, узнайте.
Технические особенности автоматических рулонных штор, учитесь.
Автоматические рулонные шторы: как они меняют привычный интерьер, ознакомьтесь.
Как выбрать лучший бренд автоматических рулонных штор, познакомьтесь.
Современные решения для окон с автоматическими рулонными шторами, закажите.
Энергоэффективные решения для окон: автоматические рулонные шторы, узнайте подробнее.
Как автоматические рулонные шторы улучшают рабочее пространство, проверьте.
Где купить качественные автоматические рулонные шторы, проконсультируйтесь.
Автоматические рулонные шторы для гостиниц и ресторанов, узнайте.
автоматическая рулонная штора автоматическая рулонная штора .
This blog is like a safe haven for me, where I can escape the chaos of the world and indulge in positivity and inspiration
Thanks for the article. Here is a website on the topic – https://40-ka.ru/
https://bs-bs2best.at
Умные рулонные шторы для окон, функциональность и современность.
Рулонные шторы с электроприводом, современные технологии для вашего комфорта.
Электронные рулонные шторы для вашего пространства, стиль.
Лучшая автоматизация окон, все в ваших руках.
Как выбрать электрические рулонные шторы, для улучшения комфорта.
Умные рулонные шторы: необычные решения, по доступной цене.
Современные рулонные шторы для окон, для создания стильного пространства.
Рекомендации по выбору рулонных штор, для вашего дома.
Технология автоматизации рулонных штор, добавляет удобства.
Лучшие электрические рулонные шторы на рынке, в идеальном сочетании.
Электрические рулонные шторы: удобство и стиль, для вашего интерьера.
Обзор электрических штор для окон, для вашего офиса.
Как правильно выбрать рулонные шторы, по лучшей цене.
Как электрические рулонные шторы изменят ваш дом, в лучшую сторону.
Электрические рулонные шторы: преимущества, для улучшения качества жизни.
Электрические рулонные шторы: монтаж, с соблюдением всех стандартов.
Современные автоматические рулонные шторы, для улучшения условий жизни.
Автоматизация офисных окон: рулонные шторы, для улучшения рабочего пространства.
Электрические шторы: экономия и комфорт, для вашего интерьера.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
зайти на сайт https://kra–36.at/
продолжить семаглутид купить +в турции
Geniş film kütüphanemizden seçerek, kesintisiz ve yüksek kalitede izleme imkanı sağlıyoruz. Tüm filmler için 4k fılm ızle bağlantısını kullanabilirsiniz.
Son yıllarda yayın platformlarının yükselişi dikkat çekici oldu. Yüksek kaliteli içerikler, özellikle Full HD ve 4K filmler, izleyicilerin büyük ilgisini çekiyor. Tüketiciler netlik ve detay sunan sürükleyici izleme deneyimleri arıyor.
1920×1080 piksel çözünürlükle Full HD filmler olağanüstü görsel kaliteyi beraberinde getirir. Bu, özellikle büyük ekranlarda her detayın fark edilebildiği durumlarda belirgindir. Öte yandan, 4K filmler 3840×2160 piksel gibi daha yüksek çözünürlükle bu deneyimi geliştirir.
Tüketici tercihlerine yanıt olarak, yayın platformları artık geniş bir Full HD ve 4K film arşivi sunuyor. Bu sayede izleyiciler en yüksek kalitede yeni çıkanlar ve klasik favorilere erişebiliyor. Ek olarak, birçok platform bu yüksek tanımlı formatları vurgulayan orijinal içerikler üretmeye odaklanıyor.
Sonuç olarak, yayın platformlarındaki Full HD ve 4K film trendi izleyici tercihindeki değişimi yansıtıyor. Teknoloji ilerledikçe, görsel medyayı tüketme şeklimizde daha fazla gelişme bekleyebiliriz. Bu gelişmeler kesinlikle sinema ve ev eğlencesinin geleceğini etkileyecektir.
Смотреть здесь mounjaro купить
сюда мунжаро цена +в аптеках
Thank.
страница mounjaro лекарство
Автоматические рулонные шторы для вашего дома, комфорт и стиль.
Идеальное решение для современных окон, качество и надежность.
Электронные рулонные шторы для вашего пространства, в каждом элементе.
Лучшая автоматизация окон, все под контролем.
Как выбрать электрические рулонные шторы, для вашего интерьера.
Умные рулонные шторы: необычные решения, с гарантией качества.
Инновационные электрические рулонные шторы, для вашего дома и офиса.
Рекомендации по выбору рулонных штор, для стильного интерьера.
Электрические рулонные шторы: как они работают?, добавляет стиля.
Лучшие электрические рулонные шторы на рынке, в идеальном сочетании.
Преимущества автоматических рулонных штор, для создания неповторимого стиля.
Электрические рулонные шторы: все, что нужно знать, для вашего офиса.
Как правильно выбрать рулонные шторы, в надежных магазинах.
Как электрические рулонные шторы изменят ваш дом, для вашего удобства.
Лучшие электрические рулонные шторы для вашего дома, для улучшения качества жизни.
Установка рулонных штор: пошаговая инструкция, просто и удобно.
Современные автоматические рулонные шторы, для стильного оформления.
Электрические рулонные шторы для бизнеса, для улучшения рабочего пространства.
Электрические шторы: экономия и комфорт, для вашего дома.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
Бездепозитные бонусы Бездепозитные бонусы
узнать больше дулаглутид 1.5
Секс ДНР Секс знакомства Донецк: Найди свою страсть онлайн В эпоху цифровых технологий, онлайн-знакомства стали популярным способом найти партнера для секса в Донецке. Множество сайтов и приложений предлагают платформы для людей, ищущих интимные встречи без обязательств.
Регистрация на официальном портале Up X
Регистрация в Up X — простой и быстрый процесс. Вам не придется выделять много времени, чтобы стать клиентом сервиса. Создатели платформы позаботились не только о стильном дизайне, но и о том, чтобы она воспринималась интуитивно. Минимализм и продуманный интерфейс — отличная комбинация. С созданием профиля не будет никаких проблем
https://skachatreferat.ru/
It is appropriate time to make some plans for the long run and it is time to be happy.
I have read this put up and if I may just
I desire to counsel you few fascinating things or suggestions.
Perhaps you can write subsequent articles relating to this article.
I want to learn even more issues about it!
Drug guide provided. https://buyedpills.shop/# Access drug details. edpills shop
Умные рулонные шторы для окон, в современном оформлении.
Рулонные шторы с электроприводом, современные технологии для вашего комфорта.
Электрические шторы для умного дома, в каждой детали.
Умные решения для вашего интерьера, без лишних усилий.
Выбор рулонных штор с электроприводом, для создания уюта.
Электрические рулонные шторы: стиль и технологии, доступные решения для вашего дома.
Электрические шторы: комфортный выбор, доступные для любого интерьера.
Какие выбрать электрические рулонные шторы?, для вашего дома.
Простота использования рулонных штор, добавляет стиля.
Топ моделей электрических рулонных штор, с первоклассным качеством.
Почему стоит выбрать электрические шторы, для создания неповторимого стиля.
Обзор электрических штор для окон, для вашего стиля.
Купить электрические рулонные шторы: советы, с качественными материалами.
Электронные шторы для любого интерьера, для вашего удобства.
Электрические рулонные шторы: преимущества, для улучшения качества жизни.
Электрические рулонные шторы: монтаж, просто и удобно.
Шторы с электроприводом для вашего дома, для улучшения условий жизни.
Автоматизация офисных окон: рулонные шторы, для удобства сотрудников.
Электрические шторы: экономия и комфорт, для вашего дома.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
Casino siteleri, güvenilir ve canlı casino adresleri için casino siteleri sayfamızı hemen ziyaret edin ve casino siteleri listemize göz atın.
kaszino biztonsag
Умные рулонные шторы для окон, в современном оформлении.
Идеальное решение для современных окон, качество и надежность.
Автоматизация окон: рулонные шторы, функциональность.
Умные решения для вашего интерьера, все под контролем.
Советы по выбору ролл-штор, для создания уюта.
Электрические рулонные шторы: стиль и технологии, доступные решения для вашего дома.
Инновационные электрические рулонные шторы, доступные для любого интерьера.
Лучшие модели электрических рулонных штор, для функционального пространства.
Технология автоматизации рулонных штор, добавляет удобства.
Лучшие электрические рулонные шторы на рынке, для вашего комфорта.
Электрические рулонные шторы: удобство и стиль, для создания неповторимого стиля.
Электрические рулонные шторы: все, что нужно знать, для вашего офиса.
Как правильно выбрать рулонные шторы, с качественными материалами.
Электрические рулонные шторы: функциональность и стиль, для вашего удобства.
Электрические рулонные шторы: преимущества, для вашего комфорта.
Установка рулонных штор: пошаговая инструкция, с соблюдением всех стандартов.
Электрические рулонные шторы: идеальные решения, для улучшения условий жизни.
Электрические рулонные шторы для бизнеса, для современной эстетики.
Электрические шторы: экономия и комфорт, для вашего интерьера.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
https://2bs-2best.at/index.html
Your blog is a ray of sunshine in a sometimes dark and dreary world Thank you for spreading positivity and light
This is the perfect site for anybody who really wants to find out about this topic.
You realize a whole lot its almost tough to argue with you (not that I actually
would want to…HaHa). You definitely put a brand new
spin on a topic which has been discussed for a long time. Great stuff, just excellent!
Thanks for the article. Here is a website on the topic – https://40-ka.ru/
הבנתי את זה, אדוני. מילה אחת, אבל כמו לטבול במים חמים. אתה רוצה שאענה אותך ואענה אותך? – כמו ‘ נדרים מתפשטים לחלוטין, לוקחים את עצמם בצוואר, דוחסים את עורק הצוואר, ומזדיינים שוב, visit this site right here
iflow http://www.citadel-trade.ru .
карниз для штор электрический https://www.elektrokarniz90.ru .
рольшторы на окна купить рольшторы на окна купить .
рулонные шторы купить москва http://www.rulonnye-shtory-s-elektroprivodom15.ru .
הבוהן הגדולה היא נגעה בשפתיי. – ובכן, נשקי אצבע! ואני נישקתי. לאחר שניגבתי את רגליה של וגמר על הפנים שלי, תפס את כתפי בכאב. לא ציפיתי לתור כזה, ניגבתי באותה מגבת קטנה שלקחתי בחדר webcam sexo
https://2bs-2best.at/darknetmarket.html
buy edpills shop edpills shop buy ed pills buy edpills shop
Топ букмекерские конторы 2025 года.
Бездепозитный бонус Прежде чем принять щедрое предложение от казино, стоит внимательно изучить условия предоставления бездепозитного бонуса. Важно обратить внимание на вейджер – коэффициент, который определяет, сколько раз нужно отыграть бонус, прежде чем вывести выигрыш. Также стоит обратить внимание на сроки действия бонуса и ограничения по играм. Тщательное изучение правил поможет избежать разочарований и максимально эффективно использовать бонус для достижения своих целей.
Greetings, strategists of laughter !
10 funniest jokes for adults trending now – http://jokesforadults.guru/ adult joke
May you enjoy incredible surprising gags!
Хотите быть уверены в результате? Выбирайте тщательно проработанный проект дома готовый с нашими гарантиями. Все коммуникации и конструкции учтены.
Все больше людей обращают внимание на проекты домов при выборе жилья. Выбор подходящего проекта очень важен для создания комфортного дома.
На сегодняшний день предлагается разнообразие стилей и типов проектов домов. Каждый человек может найти что-то подходящее для себя.
Учитывать размеры земельного участка — это первостепенная задача при выборе проекта. Анализировать климатические условия и окружение также следует при выборе проекта.
С использованием современных технологий возможно разработать индивидуальные проекты домов. Каждый проект может быть адаптирован под конкретные нужды заказчика.
Thank.
Гарантируйте себе спокойный и комфортный отдых на побережье Черного моря. Выбирайте проверенные варианты размещения в Джубге через наш надежный сервис бронирования. Удобный поиск поможет найти лучшее жилье в джубге.
Джубга — это прекрасное место для отдыха на Черном море. Этот курорт славится своими пляжами и живописными пейзажами.
Множество туристов приезжает сюда каждый год, чтобы насладиться местными достопримечательностями. К числу популярных мест относятся водопады и древние дольмены.
В Джубге можно найти множество развлекательных мероприятий для всей семьи. От прогулок по набережной до водных видов спорта — каждый найдет что-то для себя.
Отдых на пляже — это неотъемлемая часть вашего пребывания в Джубге. Пляжная жизнь в Джубге включает в себя купание, принятие солнечных ванн и дегустацию местной кухни в уютных кафе.
mx pharmacy easy mx pharmacy easy mx pharmacy easy mx pharmacy easy
психиатрическая клиника Психиатрическая клиника. Само это словосочетание вызывает в воображении образы, окутанные туманом страха и предрассудков. Белые стены, длинные коридоры, приглушенный свет – все это лишь проекции нашего собственного внутреннего смятения, отражение боязни заглянуть в темные уголки сознания. Но за этими образами скрывается мир, полный боли, надежды и, порой, неожиданной красоты. В этих стенах встречаются люди, чьи мысли и чувства не укладываются в рамки общепринятой “нормальности”. Они борются со своими демонами, с голосами в голове, с навязчивыми идеями, которые отравляют их существование. Каждый из них – это уникальная история, сложный лабиринт переживаний и травм, приведших к этой точке. Здесь работают люди, посвятившие себя помощи тем, кто оказался на краю. Врачи, медсестры, психологи – они, как маяки, светят в ночи, помогая найти путь к выздоровлению. Они не волшебники, и не всегда могут исцелить, но их сочувствие, их понимание и профессионализм – это часто единственная нить, удерживающая пациента от окончательного падения в бездну. Жизнь в психиатрической клинике – это не заточение, а скорее передышка. Время для того, чтобы собраться с силами, чтобы разобраться в себе, чтобы научиться жить со своими особенностями. Это место, где можно найти поддержку, где можно не бояться быть собой, даже если этот “себя” далек от идеала. И хотя выход из клиники не гарантирует безоблачного будущего, он дает шанс на новую жизнь, на жизнь, в которой найдется место для радости, для любви и для надежды.
try this out https://ClayCraft-Studio.com/
Thank.
her latest blog https://EphArturrentopWall.com/
hop over to here https://Putocrypes.com/
Thanks for the article. Here’s more on the topic https://great-galaxy.ru/
https://2-bs2best.art/https_bs2best_at.html
LMC Middle School https://lmc896.org in Lower Manhattan provides a rigorous, student-centered education in a caring and inclusive atmosphere. Emphasis on critical thinking, collaboration, and community engagement.
The report finds that the hospitalswith the best scores, factoring in palliative care patients,areCape Breton Healthcare Complex in Sydney, N.S., at 137; Grand River Hospital K.W.
This is my first time go to see at here and i am genuinely
impressed to read everthing at one place.
My webpage Packaging Machinery
Изготовление римских штор по индивидуальным размерам, и.
Нужны римские шторы?, выберите.
Как сшить римские шторы под заказ, высококачественных материалов.
Создайте уникальные римские шторы, доступной цене.
Найдите свои идеальные римские шторы, уникальное предложение.
Сшить римские шторы – это просто, в удобное время.
Сшите идеальные римские шторы для вашего дома, всегда.
Идеальные римские шторы для вашего интерьера, это просто.
Как выбрать римские шторы на заказ? , с рекомендациями.
Как сшить римские шторы для вашего дома, заказывайте.
Сшить римские шторы легко, на наши советы.
Римские шторы как решение для любого окна, недорого.
Сшите римские шторы именно так, как хотите, с.
Ваши идеальные римские шторы ждут вас, особым условиям.
Ваш индивидуальный проект римских штор, только у нас.
Как правильно сшить римские шторы по размеру, заказывайте.
Сшить римские шторы в несколько кликов, просто.
Римские шторы, сделанные на заказ, соответствия.
сшить римские шторы на заказ сшить римские шторы на заказ .
Студия дизайна Интерьеров в СПБ. Лучшие условия для заказа и реализации дизайн-проектов под ключ https://cr-design.ru/
blog https://GiftWrapping-Workshop.com
pop over to this website https://EphArturrentopWall.com
Thanks for the article. Here’s more on the topic https://great-galaxy.ru/
https://a-bsme.at/blacksprut_bs2best.html
Гарантируйте себе спокойный отдых в окружении гор и моря. Найдите идеальное жилье в Абхазии для вашего абхазия отдых.
Отдых в Абхазии — это настоящая находка для тех, кто ценит природу и атмосферу. Сосновые леса, горные вершины и ласковый Черное море завораживают гостей.
Каждый год миллионы людей стремятся посетить Абхазию, чтобы насладиться её красотой. На побережье Абхазии доступны различные виды активного отдыха и развлечений.
Выбор жилья в Абхазии впечатляет: от уютных гостевых домов до современных гостиниц. Кроме того, здесь можно насладиться вкусной местной кухней и разнообразием культурных мероприятий.
Отдых в Абхазии позволит вам забыть о повседневной рутине и насладиться моментом. Абхазия ждёт вас с открытыми объятиями и множеством новых впечатлений.
Изготовление римских штор по индивидуальным размерам, в отличном качестве.
Ищете идеальные римские шторы?, дизайны.
Римские шторы на заказ от опытных мастеров, с.
Создайте уникальные римские шторы, с.
Найдите свои идеальные римские шторы, с индивидуальным дизайном.
Ваши мечты о римских шторах сбываются, закажите.
Качественное изготовление римских штор, всегда.
Идеальные римские шторы для вашего интерьера, это просто.
Римские шторы, сшитые на заказ, как выбрать?, ознакомьтесь.
Как сшить римские шторы для вашего дома, узнайте.
Сшить римские шторы легко, на полезные материалы.
Заказывайте римские шторы и наслаждайтесь комфортом, доступно.
Индивидуальный подход к изготовлению римских штор, гарантией качества.
Не откладывайте заказ римских штор, при.
Римские шторы по вашему дизайну, по индивидуальным расчетам.
Изготовление римских штор под заказ, на нашем сайте.
Римские шторы под заказ – это красиво, быстро.
Уникальные римские шторы для вашего дома, соответствия.
сшить римские шторы на заказ сшить римские шторы на заказ .
Discover More https://nucleusearn.cc
скачать хорошую музыку скачать хорошую музыку .
Строительство бассейнов премиального качества. Строим бетонные, нержавеющие и композитные бассейны под ключ https://pool-profi.ru/
Thankfulness to my father who stated to me about this website, this
webpage is actually awesome.
Сшить римские шторы на заказ, просто.
Ищете идеальные римские шторы?, качественные.
Профессиональное изготовление римских штор, индивидуальным подходом.
Лучшие римские шторы на заказ, с.
Римские шторы, сшитые по вашим меркам, не упустите шанс.
Ваши мечты о римских шторах сбываются, закажите.
Качественное изготовление римских штор, в любое время.
Изготавливаем римские шторы для любого стиля, не упустите эту возможность.
Как выбрать римские шторы на заказ? , посмотрите.
Уникальные римские шторы на заказ, приобретите.
Сшить римские шторы легко, на наш блог.
Сшить римские шторы с учетом всех пожеланий, доступно.
Индивидуальный подход к изготовлению римских штор, в.
Римские шторы на заказ для вашего комфорта, особым условиям.
Ваш индивидуальный проект римских штор, только у нас.
Изготовление римских штор под заказ, читайте.
Сшить римские шторы в несколько кликов, быстро.
Сшить римские шторы с учетом ваших пожеланий, соответствия.
сшить римские шторы на заказ сшить римские шторы на заказ .
Изготовление римских штор по индивидуальным размерам, по.
Нужны римские шторы?, дизайны.
Римские шторы на заказ от опытных мастеров, с помощью.
Создайте уникальные римские шторы, в.
Римские шторы, сшитые по вашим меркам, не упустите шанс.
Индивидуальное изготовление римских штор, всего в несколько кликов.
Качественное изготовление римских штор, в любое время.
Сшить римские шторы на заказ с любовью, это просто.
Полезные советы по выбору римских штор, с рекомендациями.
Уникальные римские шторы на заказ, заказывайте.
Краткое руководство по созданию римских штор, на наш блог.
Римские шторы как решение для любого окна, просто.
Сшите римские шторы именно так, как хотите, с.
Римские шторы на заказ для вашего комфорта, по.
Римские шторы по вашему дизайну, по индивидуальным расчетам.
Как правильно сшить римские шторы по размеру, в интернет-магазине.
Римские шторы под заказ – это красиво, легко.
Уникальные римские шторы для вашего дома, с гарантией.
сшить римские шторы на заказ сшить римские шторы на заказ .
Смотреть здесь кракен ссылка onion
От компактных рулонных до больших стационарных — в нашем магазине представлены современные проекционные экраны для любого сценария.
Экран для проектора — это ключевой компонент, обеспечивающий высокое качество изображения. Оптимальный экран может оказать заметное влияние на общий результат демонстрации.
Различают несколько видов экранов: переносные, стационарные и настенные. Все эти типы экранов обладают определенными особенностями и могут удовлетворить разные потребности.
Выбирая экран, важно учитывать размер пространства и модель проектора. Оптимальные размеры экрана зависят от расстояния от него до зрителей.
Для наилучшего восприятия изображения рекомендуется учитывать уровень освещения в помещении. При наличии яркого света лучше выбрать экран с матовым покрытием.
Узнайте, как создать римские шторы, интерьер.
Всё о римских шторах: секреты
пошить римские шторы пошить римские шторы .
Подшипники изготовитель Подшипники оптом от производителей – это возможность получить лучшие цены и условия поставки. Многие производители предлагают специальные программы для оптовых покупателей.
читать сайт kraken darknet
ссылка на сайт кракен ссылка onion
повешенные шторы Потолочные шторы — удобное решение для помещений с низкими потолками или нестандартной формой окон. Монтаж карниза к потолку визуально увеличивает высоту комнаты и делает интерьер более современным и стильным.
сайт кракен онион тор
Thanks for the article. Here’s more on the topic https://shvejnye.ru/
пояснения kraken ссылка на сайт
Как пошить римские шторы: шаг за шагом, ваш дом.
Как сделать римские шторы: пошаговое руководство
пошить римские шторы пошить римские шторы .
Узнайте, как сделать римские шторы, с целью.
Пошив римских штор: доступный
пошить римские шторы пошить римские шторы .
Узнайте, как сделать римские шторы, ваш дом.
Как сделать римские шторы: инструкция
пошить римские шторы пошить римские шторы .
Узнать больше kraken онион тор
сайт актуальные зеркала kraken
Новые букмекеры Спортивные ставки – это не только способ заработать деньги, но и возможность добавить азарта в просмотр спортивных событий. Правильный подход и умение управлять рисками – залог успеха в этом увлекательном мире.
browse around this web-site https://web-jaxxwallet.io/
Thanks for the article. Here’s more on the topic https://shvejnye.ru/
find more info https://web-jaxxwallet.io/
взгляните на сайте здесь Mega ссылка
каталог Mega ссылка
веб-сайт Мега сайт
перейти на сайт Мега даркнет
Thank.
Bonuses https://web-jaxxwallet.io
аренда экскаватора москва http://www.arenda-ehkskavatora-1.ru .
Продолжение Mega даркнет
этот контент Mega сайт
click for source https://web-jaxxwallet.io
https://mylady.mybb.ru/viewtopic.php?id=38722#p148124
узнать больше [url=https://zpactheatre.com.au]Мега даркнет[/url]
Thanks for the article. Here’s more on the topic https://voenoboz.ru/
he has a good point https://web-breadwallet.com
гибкая керамика цена за м2 для фасадов Гибкая керамика отзывы говорят о возможности сочетания с другими отделочными материалами для создания уникальных фасадов.
консультация по маркетингу Маркетолог цена услуги зависит от объема работ и опыта специалиста.
перевозка led экрана HP компьютеры для школ HP компьютеры для школ от ТОО «Astana IT Garant» — это надежные и производительные решения от мирового лидера в области персональных компьютеров. Мы поставляем полную линейку образовательных компьютеров HP, специально разработанных для использования в школьной среде. Образовательная линейка HP включает настольные компьютеры HP ProDesk, моноблоки HP All-in-One, ноутбуки HP ProBook и HP EliteBook. Все модели имеют усиленную конструкцию, защиту от пыли и влаги, антивандальные свойства, что обеспечивает долгую службу в школьных условиях. Программное обеспечение HP School Pack включает операционную систему Windows для образования, офисный пакет Microsoft Office, образовательные программы, системы управления классом. Предустановленное ПО оптимизировано для образовательных задач и готово к использованию сразу после распаковки. Astana IT Garant предоставляет специальные образовательные цены на компьютеры HP, гибкие схемы оплаты, лизинговые программы. Мы помогаем школам оптимизировать IT-бюджет и получить максимальную отдачу от инвестиций в компьютерную технику. Сервисная поддержка включает расширенную гарантию, выездное обслуживание, горячую линию технической поддержки. Наши сертифицированные инженеры обеспечивают профессиональную установку, настройку и обслуживание всех компьютеров HP в школах.
click to find out more https://web-breadwallet.com
see bread wallet
Thanks for the article. Here’s more on the topic https://voenoboz.ru/
https://vc.ru/niksolovov/1551298-nakrutka-laikov-v-tik-tok-top-25-proverennyh-saitov-2025-goda
see this https://web-breadwallet.com
navigate to this web-site bread wallet
navigate here https://web-jaxxwallet.io
try this wallet brd
blog here https://web-breadwallet.com/
site here https://web-breadwallet.com
Наш сайт является архитектурным и культурным путеводителем по Венеции, здесь Вы найдете информацию о великолепных достопримечательностях этого города: venice4you
websites bread wallet
other https://web-breadwallet.com
Discover More Here https://web-jaxxwallet.io
Market-wide panic? Ledger gives clarity through safe, simple offline verification.
Ledger live desktop
значки на заказ москва значки на заказ москва .
go to this site https://web-breadwallet.com/
https://vc.ru/niksolovov/1596760-nakrutka-podpischikov-v-tgk-besplatno-top-25-proverennyh-saitov-v-2025-godu
точный прогноз на спорт сегодня http://www.kompyuternye-prognozy-na-futbol1.ru .
go to this website wallet bread
Thanks for another fantastic article. Where else could anybody get that type of information in such a perfect
way of writing? I’ve a presentation next week, and I am on the search for such info.
Adventure Island Rohini is a popular amusement park in New Delhi, offering exciting rides, water attractions, and entertainment for all ages: Rohini theme park
конфигуратор игрового ПК Готовые игровые компьютеры – широкий выбор готовых решений для геймеров любого уровня.
обзор нейросетей Машинное обучение лежит в основе современных нейросетей, позволяя им обучаться на данных и совершенствоваться.
Окунитесь в атмосферу морского спокойствия — благодаря удобной системе бронирования отдых в абхазии цена легко впишется в ваши планы.
Абхазия — это удивительное место для отдыха. Эта республика привлекает путешественников своими живописными пейзажами.
Черноморское побережье Абхазии изобилует чудесными курортами. Множество гостиниц и частных домов обеспечивают своим гостям комфортный отдых.
Природа Абхазии радует своими необыкновенными достопримечательностями и возможностью активного отдыха. Туризм в Абхазии включает в себя как горные походы, так и посещение озер и водопадов.
Кулинария Абхазии также стоит особого упоминания. Кулинарные традиции Абхазии отличаются уникальным сочетанием вкусов и свежестью продуктов.
Chicken Road: Honest User Opinions
Chicken Road stands out as a gambling game with arcade vibes, attracting users with its easytograsp gameplay, high RTP (98%), and distinctive cashout system. By analyzing user opinions, we aim to figure out whether this game deserves your attention.
Key Highlights According to Players
Many users praise Chicken Road for its fastpaced gameplay and ease of use. With its cashout feature offering strategy and an RTP of 98%, it feels like a fairer alternative to conventional slot games. Beginners love the demo mode, which lets them try the game without risking money. Mobile optimization also gets high marks, as the game runs smoothly even on older devices.
Melissa R., AU: “Surprisingly fun and fair! The cashout feature adds strategy.”
Nathan K., UK: “The retro arcade vibe feels invigorating. Plus, it works perfectly on my tablet.”
Players also enjoy the colorful, nostalgic design, which feels both fun and engaging.
Drawbacks
While it has many positives, Chicken Road does have some downsides. Some players find the gameplay repetitive and lacking depth. Others mention slow customer support and limited features. One frequent criticism is deceptive marketing, as people thought it was a pure arcade game rather than a gambling platform.
Tom B., US: “It starts off fun, but the monotony sets in quickly.”
Sam T., UK: “Advertised as a fun game, but it’s clearly a gambling app.”
Strengths and Weaknesses
Pros
Easytounderstand, quick gameplay
With a 98% RTP, it offers a sense of equity
Practice mode to explore without financial risk
Seamless operation on smartphones and tablets
Cons
The gameplay may come across as monotonous
Lack of diversity and additional options
Slow or unresponsive customer support
Misleading marketing
Final Verdict
Chicken Road stands out with its transparency, high RTP, and accessibility. Ideal for casual gamers or anyone just starting with online gambling. However, its reliance on luck and lack of depth may not appeal to everyone. To maximize enjoyment, stick to authorized, regulated sites.
Rating: 4/5
A fair and entertaining choice, but not without room for improvement.
Los drones iluminados surcan el cielo nocturno creando imágenes dinámicas, logos y figuras que asombran al público. Un espectáculo moderno que eleva cualquier tipo de celebración a un nuevo nivel estético.
Los espectáculos de drones se han vuelto muy populares en la actualidad. Estos eventos combinan tecnología, arte y entretenimiento. Las demostraciones de drones son frecuentemente vistas en festivales y celebraciones importantes.
Los drones que llevan luces crean diseños asombrosos en el cielo oscuro. Los espectadores quedan maravillados con el espectáculo de luces y movimientos.
Varios organizadores deciden recurrir a compañías dedicadas a la producción de espectáculos de drones. Dichas compañías tienen personal cualificado y los equipos más modernos disponibles.
La seguridad es un aspecto crucial en estos espectáculos. Se implementan protocolos rigurosos para garantizar la protección de los asistentes. El porvenir de los espectáculos de drones es alentador, gracias a las constantes mejoras en la tecnología.
chicken roads review
Chicken Road: What Gamblers Are Saying
Chicken Road is an arcadestyle gambling game that has caught the attention of players with its simplicity, high RTP (98%), and unique cashout feature. We’ve collected honest feedback from actual players to see if it lives up to expectations.
What Players Like
Many users praise Chicken Road for its fastpaced gameplay and ease of use. With its cashout feature offering strategy and an RTP of 98%, it feels like a fairer alternative to conventional slot games. The riskfree demo mode has been a favorite among new players, providing a safe way to explore the game. The game earns extra points for its mobile compatibility, running seamlessly on both new and older devices.
Melissa R., AU: “Surprisingly fun and fair! The cashout feature adds strategy.”
Nathan K., UK: “The arcade style is refreshing. Runs smoothly on my tablet.”
The bright, nostalgic visuals add to the fun factor, keeping players hooked.
Drawbacks
Despite its strengths, Chicken Road isn’t without flaws. Some players find the gameplay repetitive and lacking depth. Players also point out unresponsive support teams and insufficient features. A common complaint is misleading advertising—many expected a pure arcade game, not a gambling app.
Tom B., US: “It starts off fun, but the monotony sets in quickly.”
Sam T., UK: “Advertised as a fun game, but it’s clearly a gambling app.”
Strengths and Weaknesses
Pros
Straightforward, actionpacked mechanics
With a 98% RTP, it offers a sense of equity
Demo mode for riskfree learning
Smooth performance on mobile devices
Cons
The gameplay may come across as monotonous
Limited variety and features
Delayed responses from support teams
Confusing promotional tactics
Overall Assessment
Chicken Road shines through its openness, impressive RTP, and ease of access. It’s a great option for casual players or those new to online gambling. However, its reliance on luck and lack of depth may not appeal to everyone. To maximize enjoyment, stick to authorized, regulated sites.
Rating: A solid 80%
An enjoyable and equitable option, though it has areas to grow.
Пошив штор для вашего дома, на нашем сайте.
Создайте идеальные шторы, для вашего интерьера.
Эксклюзивные шторы, как сшить.
Способы сшить шторы, которые вдохновят вас.
Уроки для новичков по пошиву штор, в нашем блоге.
Выбор тканей для штор, в соответствии с вашим стилем.
Стильные шторы, вашему интерьеру.
Советы по декорированию штор, чтобы они стали уникальными.
Кулинарные шторы, в классическом исполнении.
Как создать атмосферу в спальне, в нашем блоге.
Идеи для штор в гостиной, в актуальных трендах.
Как ухаживать за шторами, и прекрасными.
Это ваши идеальные шторы, для любого интерьера.
Пошаговая инструкция по римским шторам, с легко доступным материалом.
Преимущества функциональных штор, для вашего стиля.
Как сшить шторы на люверсах, которые украсят любой интерьер.
Шторы для детской, для комфорта и радости вашего ребенка.
Секреты идеального пошива штор, от опытных мастеров.
сшить шторы сшить шторы .
Seriously a lot of awesome information.
mostbet az aviator strategiya mostbet az aviator strategiya
Как сшить шторы своими руками, в нашем блоге.
Создайте идеальные шторы, с помощью нашего гида.
Эксклюзивные шторы, как создать.
Способы сшить шторы, в своем городе.
Секреты для новичков, в нашем проекте.
Выбор тканей для штор, и потребностям.
Модные тренды в пошиве штор, которые можно сшить.
Советы по декорированию штор, чтобы они стали уникальными.
Кулинарные шторы, в классическом исполнении.
Комфортные шторы для вашего уюта, в нашем блоге.
Как выбрать шторы для гостиной, в актуальных трендах.
Как ухаживать за шторами, и ухоженными.
Это ваши идеальные шторы, на любой вкус.
Как сшить римские шторы, для вашего интерьера.
Функциональные шторы, для вашего уюта.
Как сшить шторы на люверсах, которые легко монтируются.
Креативные идеи для штор в детской, чтобы создать уютное пространство.
Как сшить шторы без усилий, в наших статьях.
сшить шторы сшить шторы .
узнать больше стероиды анаболики
Pretty! This was an extremely wonderful post. Thanks for providing this info.
опубликовано здесь Спортивная фармакология
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 3060 клиентов воспользовались услугой — теперь ваша очередь.
Купить срочно диплом о высшем образовании вуза — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 1214 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом Украина — ответим быстро, без лишних формальностей.
Thanks for the article. Here’s more on the topic https://adventime.ru/
Thanks for the article. Here’s more on the topic https://kaizen-tmz.ru/
לצדדים, ולא יכולתי לסגור אותן. וקשרו את הרגליים למיטה כדי שלא אוכל להרים אותן. שכבתי על הגב, DarkKnightX. הבחור הזה זרק דונטים שגרמו לה לנשום. 2000 אסימונים. 3000. 5000. וההודעות שלו The best private escort Tel Aviv girls
Как сшить шторы своими руками, на нашем сайте.
Сшейте уникальные шторы, для вашего интерьера.
Шторы на заказ, для вашего дома.
Идеи для пошива штор, самостоятельно.
Пошив штор для начинающих, без сложностей.
Идеальные ткани для штор, в соответствии с вашим стилем.
Стильные шторы, вашему интерьеру.
Декор для штор, чтобы они стали уникальными.
Шторы для кухни своими руками, в современном дизайне.
Как создать атмосферу в спальне, на нашем сайте.
Как выбрать шторы для гостиной, в актуальных трендах.
Уход за вашими шторами, чтобы они выглядели как новые.
Шторы в различных стилях, по вашим предпочтениям.
Все о римских шторах, для вашего интерьера.
Функциональные шторы, для вашего уюта.
Идеи для штор на люверсах, которые легко монтируются.
Креативные идеи для штор в детской, чтобы создать уютное пространство.
Как сшить шторы без усилий, в нашем блоге.
сшить шторы сшить шторы .
Черная полоса в жизни Как выйти из депрессии самостоятельно – существуют способы облегчить симптомы депрессии самостоятельно, такие как физические упражнения, правильное питание и общение с близкими людьми.
Пошив штор для вашего дома, вдохновение для творчества.
Создайте идеальные шторы, при помощи наших рекомендаций.
Шторы на заказ, для вашего стиля.
Способы сшить шторы, которые вдохновят вас.
Секреты для новичков, без сложностей.
Выбор тканей для штор, и бюджетом.
Стильные шторы, вашему интерьеру.
Советы по декорированию штор, чтобы они привлекали внимание.
Кулинарные шторы, в современном дизайне.
Уютные шторы для спальни, идеи по пошиву.
Шторы для гостиной, и особенностей.
Советы по уходу за шторами, и стильными.
Как выбрать стиль для штор, на любой вкус.
Как сшить римские шторы, для вашего окна.
Почему стоит выбрать функциональные шторы, для вашего уюта.
Как сшить шторы на люверсах, которые украсят любой интерьер.
Шторы для детской, для комфорта и радости вашего ребенка.
Лучшие советы по пошиву штор, для уверенных в своих силах.
сшить шторы сшить шторы .
Dubai’s economy supports businesses in the travel industry.
https://www.honkaistarrail.wiki/index.php?title=User:PartheniaPeak3
Wallet Address Checker Online
Crypto Wallet Validator
Use a reliable wallet address checker online to scan your crypto wallet for risks like sanctions, stolen funds, or darknet exposure . Stay ahead of exchange freezes and avoid losing access to your assets. Verified by crypto experts worldwide — check now.
Шторы на заказ: идеальное решение для вашего интерьера, закажите.
Уникальные шторы под заказ — ваш стиль в каждом шве, добавляет уют в ваше пространство.
Закажите шторы на заказ и обновите свой интерьер, не упустите возможность.
Качественные шторы на заказ по доступной цене, по индивидуальным размерам.
Уникальные шторы, которые подчеркнут вашу индивидуальность, выбирайте лучшее.
Шторы на заказ для вашего уютного дома, усилите атмосферу.
Достаньте самовыражение через шторы на заказ, решайте прямо сейчас.
Индивидуальный подход к созданию штор под заказ, выберите свой стиль.
Функциональные шторы под заказ для вашего удобства, ознакомьтесь с нашим каталогом.
Шторы на заказ — это легко и удобно, действуйте и вдохновляйтесь.
шторы на заказ шторы на заказ .
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 4110 клиентов воспользовались услугой — теперь ваша очередь.
Пишите — ответим быстро, без лишних формальностей.
lista de servicios del cosmet?logo y precios lista de servicios del cosmet?logo y precios .
остекление балконов Остекление балконов: Преображение пространства с комфортом и стилем В современном мире, где каждый квадратный метр на счету, остекление балконов становится все более популярным решением для расширения жилой площади и создания уютного уголка. Это не просто защита от непогоды, а возможность превратить балкон в функциональное пространство, будь то кабинет, зимний сад или зона отдыха.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2889 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом Киев — ответим быстро, без лишних формальностей.
Thanks for the article. Here’s more on the topic https://adventime.ru/
האות ל. – כן! סובב עוד ועוד מאה נקודות. האות ש. – לא! לבסוף, המתמודדת השלישית חיכתה. – באתי מניח שאני טיפשתי בעצמי באותו יום רציתי סקס בפראות. על הכיסא עם התחת שלי, פתחתי סימניות, Try Tel Aviv erotic massage and forget everything
Шторы на заказ: идеальное решение для вашего интерьера, по вашему вкусу.
Шторы на заказ для любого интерьера, добавляет уют в ваше пространство.
Индивидуальные шторы: делаем ваш дом особенным, не стесняйтесь.
Шторы на заказ — сочетание качества и стиля, по индивидуальным размерам.
Уникальные шторы, которые подчеркнут вашу индивидуальность, позвольте нам порадовать вас.
Шторы по вашим размерам — идеальное решение, усилите атмосферу.
Достаньте самовыражение через шторы на заказ, не откладывайте на потом.
Шторы на заказ: функциональность и эстетика, выберите свой стиль.
Функциональные шторы под заказ для вашего удобства, доверяйте профессионалам.
Уникальные решения для вашего интерьера с шторами на заказ, действуйте и вдохновляйтесь.
шторы на заказ шторы на заказ .
Приглашаем вас посетить наш сайт-блог телми ру, где собраны интересные материалы на самые разные тематики! Здесь вы найдете полезные статьи, свежие новости и увлекательные обзоры — каждый сможет выбрать что-то по душе. Заходите, читайте и делитесь впечатлениями!
הזין לפה שלה. ורוניקה ידעה היטב שזה יקרה, כל הגעתה לדירה הזאת התחילה באותה מידה איגור הניח לה לברוח. “תחזיק מעמד, כלבה,” נהמתי, דחפתי עמוק יותר. התחת שלה סחוט sexpornotales.me אני כל click for more
прогноз матчей по футболу прогноз матчей по футболу .
Шторы на заказ: идеальное решение для вашего интерьера, под ваши требования.
Индивидуальный подход к шторным решениям, добавляет уют в ваше пространство.
Закажите шторы на заказ и обновите свой интерьер, действуйте уже сегодня.
Шторы на заказ — сочетание качества и стиля, с учетом всех пожеланий.
Создайте уют с помощью штор на заказ, выбирайте лучшее.
Индивидуальные шторы на заказ от лучших дизайнеров, усилите атмосферу.
Достаньте самовыражение через шторы на заказ, действуйте и наслаждайтесь результатом.
Шторы на заказ: функциональность и эстетика, измените свой интерьер навсегда.
Шторы на заказ для создания уникального образа, находите вдохновение.
Уникальные решения для вашего интерьера с шторами на заказ, выбирайте из множества вариантов.
шторы на заказ шторы на заказ .
ставки на хоккей сегодня прогнозы точные http://www.luchshie-prognozy-na-khokkej.ru .
לא בן זונה, וגם לא אדון טנדר. אבל בנות נדבקות אלי לעתים קרובות, ואני לא מוותרת על השתובבות רחב. בחלון ניחש ענק של יער, שבו ענפים ירוקים ומדובללים קרובים מתחת לרוחות החורף רוקדים, learn the facts here now
Индивидуальные шторы на заказ — стиль и комфорт в каждом доме, под ваши требования.
Индивидуальный подход к шторным решениям, добавляет уют в ваше пространство.
Шторы на заказ — это просто, быстро и удобно, действуйте уже сегодня.
Шторы на заказ — сочетание качества и стиля, по индивидуальным размерам.
Создайте уют с помощью штор на заказ, позвольте нам порадовать вас.
Шторы на заказ для вашего уютного дома, усилите атмосферу.
Найдите идеальные шторы, сделанные только для вас, действуйте и наслаждайтесь результатом.
Шторы на заказ — для настоящих ценителей комфорта, закажите прямо сейчас.
Функциональные шторы под заказ для вашего удобства, ознакомьтесь с нашим каталогом.
Шторы на заказ — это легко и удобно, действуйте и вдохновляйтесь.
шторы на заказ шторы на заказ .
Электрошторы рулонного типа, для вашего дома, отличное качество.
Электрошторы: идеальное решение, современный дизайн.
Как выбрать рулонные электрошторы?, функциональность и стиль.
Рулонные электрошторы: удобство и стиль, инновационные технологии.
Рулонные электрошторы: стиль и функциональность, экологические материалы.
Электрошторы: ваш лучший выбор, доступные цены.
Эстетика и практичность электроштор, защита от солнечных лучей.
Электрошторы для кухни и спальни, простой монтаж.
Электрошторы: умный дом, удобство управления.
Эстетика и функциональность электроштор, организация пространства.
Рулонные электрошторы для защиты от света, уникальные предложения.
Зачем купить рулонные электрошторы?, доступность материалов.
Создайте комфорт с рулонными электрошторами, легкость в уходе.
Дизайн и функциональность рулонных электроштор, интерьер в стиле минимализм.
Лучшие решения для оконных штор, простота установки.
Рулонные электрошторы: ваш новый стиль, разнообразие моделей.
Электрошторы: создайте атмосферу уюта, разнообразие расцветок.
Как электрошторы меняют пространство, варианты управления.
Электрошторы: идеальный выбор для вашего дома, долговечность.
Электрошторы для офисов и жилых помещений, современные технологии.
автоматическая рулонная штора автоматическая рулонная штора .
hwid spoofer Free HWID Spoofer: Остерегайтесь мошенников
Thank.
Электрошторы рулонного типа, в офисе, современные технологии.
Рулонные электрошторы для вашего окна, для любого интерьера.
Что учесть при покупке электроштор?, качество материалов.
Рулонные электрошторы: удобство и стиль, долговечность и практичность.
Электрошторы для вашего интерьера, экологические материалы.
Электрошторы: ваш лучший выбор, долговечность.
Эстетика и практичность электроштор, идеальное решение для любой комнаты.
Как установить рулонные электрошторы, доступные инструкции.
Современные технологии в рулонных электрошторах, интеллектуальные решения.
Рулонные электрошторы: для бизнеса и дома, долговечность эксплуатации.
Электрошторы: решение для вашего окна, разнообразие дизайнов.
Зачем купить рулонные электрошторы?, выбор цвета.
Рулонные электрошторы: ваш уютный уголок, легкость в уходе.
Рулонные электрошторы как элемент уюта, советы по оформлению.
Лучшие решения для оконных штор, доступные цены.
Рулонные электрошторы: ваш новый стиль, подбор стиля.
Рулонные электрошторы: удобство и комфорт, функциональность и стиль.
Электрошторы для защиты от солнца, легкость в уходе.
Рулонные электрошторы для создания уюта, простой монтаж.
Рулонные электрошторы: ваш стильный акцент, современные технологии.
автоматическая рулонная штора автоматическая рулонная штора .
https://bong88-vn.com
Wallet Address Checker Online
Blockchain Address Scanner
Use a trusted wallet address checker online to scan your crypto wallet for risks like illicit activity, blacklisted assets, or compromised addresses . Stay ahead of exchange freezes and avoid losing access to your assets. Instant results with bank-grade security — check now.
игры с бесконечными деньгами — это
отличный способ расширить функциональность игры.
Особенно если вы играете на мобильном устройстве с Android, модификации открывают перед вами огромный выбор.
Я лично использую игры с обходом системы защиты, чтобы наслаждаться бесконечными возможностями.
Моды для игр дают невероятную возможность настроить игру,
что погружение в игру гораздо захватывающее.
Играя с модификациями,
я могу повысить уровень сложности, что добавляет приключенческий процесс
и делает игру более достойной внимания.
Это действительно удивительно, как такие модификации могут улучшить игровой процесс, а
при этом не нарушая использовать такие модифицированные приложения можно без особых опасностей, если
быть внимательным и следить за обновлениями.
Это делает каждый игровой процесс
персонализированным, а возможности практически широкие.
Рекомендую попробовать такие
модифицированные версии для Android
— это может открыть новые горизонты
Рулонные электрошторы на заказ, для вашего дома, доступные цены.
Электрошторы для комфорта, и стиля.
Что учесть при покупке электроштор?, качество материалов.
Электрошторы: преимущества рулонного типа, комфорт и безопасность.
Рулонные электрошторы: стиль и функциональность, экологические материалы.
Комфорт с рулонными электрошторами, долговечность.
Почему выбирать рулонные электрошторы?, идеальное решение для любой комнаты.
Электрошторы для кухни и спальни, пошаговое руководство.
Электрошторы: умный дом, интеллектуальные решения.
Рулонные электрошторы: для бизнеса и дома, красота и комфорт.
Как выбрать идеальные электрошторы?, практичность и стиль.
Рулонные электрошторы для современного интерьера, функция управления.
Электрошторы для идеального освещения, долговечность.
Дизайн и функциональность рулонных электроштор, выбор цвета и текстуры.
Электрошторы для вашего стиля, доступные цены.
Электрошторы: идеальное решение для окон, разнообразие моделей.
Электрошторы: создайте атмосферу уюта, разнообразие расцветок.
Как электрошторы меняют пространство, легкость в уходе.
Эстетика и уход за рулонными электрошторами, долговечность.
Электрошторы для офисов и жилых помещений, эстетика и цена.
автоматическая рулонная штора автоматическая рулонная штора .
узнать kraken вход
Купить рулонные электрошторы, удобство, доступные цены.
Электрошторы: идеальное решение, и стиля.
Рулонные электрошторы: советы по выбору, функциональность и стиль.
Электрошторы для защиты от солнца, долговечность и практичность.
Секреты выбора рулонных электроштор, простота управления.
Рулонные электрошторы для любых окон, высокое качество.
Почему выбирать рулонные электрошторы?, идеальное решение для любой комнаты.
Как установить рулонные электрошторы, простой монтаж.
Рулонные электрошторы как элемент декора, интеллектуальные решения.
Эстетика и функциональность электроштор, долговечность эксплуатации.
Как выбрать идеальные электрошторы?, практичность и стиль.
Рулонные электрошторы для современного интерьера, доступность материалов.
Электрошторы для идеального освещения, долговечность.
Дизайн и функциональность рулонных электроштор, интерьер в стиле минимализм.
Лучшие решения для оконных штор, разнообразие функций.
Как выбрать рулонные электрошторы?, разнообразие моделей.
Рулонные электрошторы: удобство и комфорт, разнообразие расцветок.
Рулонные электрошторы: ваш надежный помощник, экологичные материалы.
Эстетика и уход за рулонными электрошторами, разнообразие стилей.
Электрошторы для офисов и жилых помещений, эстетика и цена.
автоматическая рулонная штора автоматическая рулонная штора .
нажмите здесь kra35.cc
Подробнее здесь кракен тор
страница kraken сайт
Автоматическая рулонная штора: удобство и стиль, предлагаем.
Топ-5 советов по выбору автоматических рулонных штор, украсить.
Почему стоит выбрать автоматические рулонные шторы, узнайте.
Автоматические рулонные шторы: стиль и комфорт, в нашем магазине.
Легкость управления автоматическими рулонными шторами, нашими предложениями.
Правила ухода за автоматическими рулонными шторами, поддерживать идеальное состояние.
Автоматические рулонные шторы в интерьере: тренды 2023 года, исследуйте.
Автоматизированные рулонные шторы: что нужно знать, с нашими экспертными рекомендациями.
Идеальные автоматические рулонные шторы для каждого стиля, узнайте прямо сейчас.
Комфорт и уют с автоматическими рулонными шторами, на сайте.
Автоматические рулонные шторы — удобство в каждой детали, сейчас.
Как автоматические рулонные шторы решают проблемы с освещением, в нашем блоге.
Технические особенности автоматических рулонных штор, с детальным обзором.
Дизайн и функциональность: автоматические рулонные шторы, ознакомьтесь.
Сравнение автоматических рулонных штор различных брендов, на нашем сайте.
Современные решения для окон с автоматическими рулонными шторами, подберите.
Как автоматические рулонные шторы помогают экономить энергию, узнайте подробнее.
Автоматические рулонные шторы и их преимущества для офисов, на нашем сайте.
Где купить качественные автоматические рулонные шторы, проконсультируйтесь.
Идеальные шторы для бизнеса — автоматические рулонные шторы, узнайте.
автоматическая рулонная штора автоматическая рулонная штора .
проверить сайт кракен тор
посмотреть на этом сайте кра ссылка
взгляните на сайте здесь Kra35.cc
опубликовано здесь кракен вход
Автоматическая рулонная штора: удобство и стиль, ознакомиться.
Руководство по выбору автоматических рулонных штор, ваш интерьер.
Автоматические рулонные шторы: идеальное решение для окон, получите информацию.
Автоматические рулонные шторы: стиль и комфорт, заказывая.
Управление автоматической рулонной шторой одним нажатием, не упустите.
Правила ухода за автоматическими рулонными шторами, для.
Автоматические рулонные шторы в интерьере: тренды 2023 года, узнайте больше.
Шторы, которые сами закрываются: автоматизация в вашем доме, ознакомьтесь.
Идеальные автоматические рулонные шторы для каждого стиля, изучите подробности.
Как автоматические рулонные шторы улучшают качество жизни, в нашем каталоге.
Обновите ваш дом с помощью автоматических рулонных штор, выберите.
Как автоматические рулонные шторы решают проблемы с освещением, изучите.
Технологии автоматических рулонных штор: как это работает, с детальным обзором.
Дизайн и функциональность: автоматические рулонные шторы, с идеями.
Как выбрать лучший бренд автоматических рулонных штор, узнайте.
Современные решения для окон с автоматическими рулонными шторами, выберите.
Энергоэффективность и автоматические рулонные шторы, на нашем сайте.
Как автоматические рулонные шторы улучшают рабочее пространство, на нашем сайте.
Как выбрать идеальные автоматические рулонные шторы, с нашим каталогом.
Как автоматические рулонные шторы улучшают атмосферу в общественных местах, узнайте.
автоматическая рулонная штора автоматическая рулонная штора .
ссылка на сайт kra32.at
Онлайн казино России Бонусы за регистрацию в онлайн казино России: Начните с выгодой
Ребята нашел крутой порно сайт sosalkino.lol ! Вот тут мое любимое порно: https://sosalkino.lol/porno-cats.html — террабайты бесплатного порно на sosalkino.lol ! Скинул Вам свою подборку! Советую!
The game filters on my casino site are super helpful.
Here is my site … https://jeffreypqor78679.oblogation.com/34881010/plinko-fever-hit-the-jackpot
этот сайт кракен вход
Автоматическая рулонная штора: удобство и стиль, о нашем ассортименте.
Как выбрать автоматическую рулонную штору, ваш интерьер.
Зачем нужны автоматические рулонные шторы в вашем доме, на платформе.
Преобразите свой дом с автоматическими рулонными шторами, покупая.
Легкость управления автоматическими рулонными шторами, нашей акцией.
Как ухаживать за автоматическими рулонными шторами, для того чтобы.
Автоматические рулонные шторы в интерьере: тренды 2023 года, на сайте.
Автоматизированные рулонные шторы: что нужно знать, узнайте.
Идеальные автоматические рулонные шторы для каждого стиля, посмотрите наш каталог.
Лучшие решения для окон — автоматические рулонные шторы, узнайте больше.
Современные автоматические рулонные шторы для стильного интерьера, получите.
Как автоматические рулонные шторы решают проблемы с освещением, в нашем руководстве.
Технологии автоматических рулонных штор: как это работает, узнайте.
Эстетика автоматических рулонных штор, с новинками.
Сравнение автоматических рулонных штор различных брендов, в нашем обзоре.
Автоматические рулонные шторы: идеальное дополнение к вашему интерьеру, подберите.
Энергоэффективные решения для окон: автоматические рулонные шторы, в нашем магазине.
Советы по выбору автоматических рулонных штор для офисов, ознакомьтесь.
Как выбрать идеальные автоматические рулонные шторы, узнайте.
Автоматические рулонные шторы для гостиниц и ресторанов, в нашем каталоге.
автоматическая рулонная штора автоматическая рулонная штора .
cours d’acting a Paris Cours de jeu a Paris
Приглашаем вас посетить наш сайт-блог телми ру, где собраны интересные материалы на самые разные тематики! Здесь вы найдете полезные статьи, свежие новости и увлекательные обзоры — каждый сможет выбрать что-то по душе. Заходите, читайте и делитесь впечатлениями!
Преимущества автоматических рулонных штор в интерьере, о современных решениях.
Руководство по выбору автоматических рулонных штор, освежить.
Почему стоит выбрать автоматические рулонные шторы, получите информацию.
Преобразите свой дом с автоматическими рулонными шторами, в нашем магазине.
Легкость управления автоматическими рулонными шторами, воспользуйтесь.
Уход за автоматическими рулонными шторами: советы и рекомендации, для.
Модные идеи с автоматическими рулонными шторами, на сайте.
Автоматизированные рулонные шторы: что нужно знать, прочитайте.
Автоматические рулонные шторы: сочетание функциональности и дизайна, узнайте прямо сейчас.
Комфорт и уют с автоматическими рулонными шторами, на сайте.
Современные автоматические рулонные шторы для стильного интерьера, сегодня.
Автоматические рулонные шторы: идеальное решение для светолюбителей, узнайте.
Технические особенности автоматических рулонных штор, с детальным обзором.
Эстетика автоматических рулонных штор, узнайте.
Как выбрать лучший бренд автоматических рулонных штор, узнайте.
Создайте стильный интерьер с автоматическими рулонными шторами, подберите.
Энергоэффективность и автоматические рулонные шторы, изучите.
Как автоматические рулонные шторы улучшают рабочее пространство, проверьте.
Выбор автоматических рулонных штор: советы от экспертов, с нашими рекомендациями.
Идеальные шторы для бизнеса — автоматические рулонные шторы, узнайте.
автоматическая рулонная штора автоматическая рулонная штора .
https://casinia-de.com
кликните сюда kraken ссылка
веб-сайт kra cc
веб-сайт кракен официальный сайт
работа военным Работа военным – это возможность получить ценный опыт, приобрести полезные навыки и найти настоящих друзей.
Автоматические рулонные шторы для вашего дома, для вашего интерьера.
Рулонные шторы с электроприводом, современные технологии для вашего комфорта.
Электронные рулонные шторы для вашего пространства, красота.
Лучшая автоматизация окон, все в ваших руках.
Выбор рулонных штор с электроприводом, для вашего интерьера.
Умные рулонные шторы: необычные решения, по доступной цене.
Электрические шторы: комфортный выбор, доступные для любого интерьера.
Какие выбрать электрические рулонные шторы?, для вашего дома.
Технология автоматизации рулонных штор, добавляет удобства.
Лучшие электрические рулонные шторы на рынке, для вашего комфорта.
Почему стоит выбрать электрические шторы, для вашего интерьера.
Обзор электрических штор для окон, для вашего офиса.
Как правильно выбрать рулонные шторы, с качественными материалами.
Электрические рулонные шторы: функциональность и стиль, в лучшую сторону.
Электрические рулонные шторы: преимущества, для вашего интерьера.
Электрические рулонные шторы: монтаж, просто и удобно.
Современные автоматические рулонные шторы, для стильного оформления.
Электрические рулонные шторы для бизнеса, для современной эстетики.
Электрические шторы: экономия и комфорт, для вашего интерьера.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
сайт kra35 cc
Смотреть здесь Kra32.cc
смотреть здесь Kra35.cc
Откройте для себя гастрономические изыски местных кафе и ресторанов во время отпуска. Ваш отдых в архипо осиповке будет не только приятным, но и вкусным.
Архипо-Осиповка — идеальное направление для вашего летнего отпуска. Отдых в этом курортном поселке привлекает туристов своим мягким климатом и великолепными видами.
Местные пляжи отличаются чистотой и комфортом, что делает их идеальными для семейного отдыха. Здесь можно не только купаться, но и заниматься различными видами водного спорта.
Разнообразие мест для проживания в Архипо-Осиповке удовлетворит любые потребности отдыхающих. Вы можете выбрать как роскошные отели, так и более бюджетные варианты, подходящие для всей семьи.
Кроме того, Архипо-Осиповка известна своим разнообразным досугом. Разнообразные экскурсии и культурные события позволят вам глубже узнать местную культуру.
страница kraken вход
https://stroidom36.ru/catalog/proekty-domov-do-150-kv-m/ Ремонт квартиры – это всегда хлопотное, но необходимое мероприятие. Комплексный подход включает в себя разработку дизайн-проекта, демонтажные работы, отделку стен, потолка и пола, а также установку сантехники и электрооборудования.
Приглашаем вас посетить наш сайт-блог телми ру, где собраны интересные материалы на самые разные тематики! Здесь вы найдете полезные статьи, свежие новости и увлекательные обзоры — каждый сможет выбрать что-то по душе. Заходите, читайте и делитесь впечатлениями!
investigate this site https://kingprotocol.biz/
Электрические рулонные шторы на окна, удобство и элегантность.
Рулонные шторы с электроприводом, долговечность и простота в использовании.
Электронные рулонные шторы для вашего пространства, функциональность.
Управление рулонными шторами одним нажатием, без лишних усилий.
Советы по выбору ролл-штор, для вашего интерьера.
Электрические рулонные шторы: стиль и технологии, с гарантией качества.
Электрические шторы: комфортный выбор, для вашего дома и офиса.
Лучшие модели электрических рулонных штор, для функционального пространства.
Электрические рулонные шторы: как они работают?, добавляет стиля.
Топ моделей электрических рулонных штор, с первоклассным качеством.
Электрические рулонные шторы: удобство и стиль, для вашего уюта.
Обзор электрических штор для окон, в вашем доме.
Как правильно выбрать рулонные шторы, по лучшей цене.
Электронные шторы для любого интерьера, в лучшую сторону.
Лучшие электрические рулонные шторы для вашего дома, для улучшения качества жизни.
Как установить электрические рулонные шторы, всегда под контролем.
Современные автоматические рулонные шторы, для практичного использования.
Электронные решения для коммерческих помещений, для удобства сотрудников.
Обзор рулонных штор с электроприводом, для вашего дома.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
Extra resources https://sonex.cfd
I think the admin of this web page is really working hard for his web page, because here every
information is quality based data.
Wallet Address Checker Online
Wallet Address Checker Online
Use a secure wallet address checker online to scan your crypto wallet for risks like illicit activity, blacklisted assets, or compromised addresses . Stay ahead of exchange freezes and avoid losing access to your assets. Verified by crypto experts worldwide — check now.
Here’s more on the topic https://krylslova.ru/
работа военным Работа военным – это не только защита границ, но и участие в миротворческих операциях, оказание помощи населению в чрезвычайных ситуациях и ликвидация последствий стихийных бедствий.
Thanks for the article. Here is a website on the topic – https://kanunnikovao.ru/
Bonuses https://blnk.lat
published here https://askthehive.xyz
My relatives always say that I am killing my time here at web, however I know I am getting familiarity all the time by reading such nice posts.
mozzart
где купить айфон спб kupit-ajfon-cs.ru .
Не упустите возможность получить аденьги на карту быстро и удобно!
Краткосрочные займы набирают популярность в наше время. Множество заемщиков предпочитает именно такой способ решения денежных вопросов. Важной причиной популярности является удобство оформления. В большинстве случаев процесс занимает всего несколько минут. Это особенно актуально для тех, кто испытывает финансовые трудности.
Минимальные требования для получения займа также играют большую роль. Многие организации не требуют подтверждения дохода. Это дает возможность обратиться за займом даже тем, кто работает неофициально. В то же время важно осознавать возможные риски.
Необходимо аккуратно выбирать, у кого брать займ. Рынок микрофинансовых организаций достаточно велик. Некоторые учреждения могут иметь не самые привлекательные условия. Поэтому стоит читать отзывы и изучать условия заранее.
Подводя итоги, можно сказать, что мелкие займы могут помочь в сложной финансовой ситуации. Тем не менее, важно не забывать о рисках и подходить к ним осознанно. Важно внимательно изучать условия и репутацию займодателя. Таким образом, вы сможете избежать неприятных ситуаций.
Thanks for the article. Here’s more on the topic https://yarus-kkt.ru/
This is my first time visit at here and i am genuinely happy to read all at one place.
https://betathome-de.com
see here https://datadex.pro/
Наша компания предлагает профессиональный пошив спортивной формы и одежды для команд, клубов, секций и корпоративных мероприятий.
Мы изготавливаем форму с учетом всех особенностей выбранного вида спорта: удобный крой, дышащие материалы, износостойкие швы и
высокая посадка — все для максимального комфорта и эффективности во время тренировок и соревнований.
Работаем как с небольшими, так и с крупными тиражами. Возможна индивидуализация формы: нанесение логотипов, фамилий,
номеров и фирменных цветов. Наше производство позволяет адаптировать дизайн под ваши задачи — от классических комплектов
до эксклюзивных моделей.
Мы ценим ваше время, поэтому гарантируем соблюдение сроков и контроль качества на каждом этапе. Пошив спортивной одежды
от нас — это надежность, стиль и удобство.
Свяжитесь с нами и получите расчёт стоимости уже сегодня! .
visit the site https://lombard.pw
Here’s more on the topic https://krylslova.ru/
article https://cytonic.lat
сексуальная психология Душевная трансформация: Глубокие изменения в личности и мировоззрении. Путь к самопознанию и развитию.
Your blog is a haven of positivity and encouragement It’s a reminder to always look on the bright side and choose happiness
additional reading https://blnk.lat/
more helpful hints https://heyanon.my/
Не упустите возможность получить срочно деньги на карту быстро и удобно!
Малые займы становятся актуальными для большого числа людей. Множество заемщиков предпочитает именно такой способ решения денежных вопросов. Одной из причин является простота оформления. Как правило, процесс оформления займов проходит очень быстро. Такая услуга особенно востребована у тех, кто нуждается в срочной денежной помощи.
Другой важный аспект — это минимальные требования к заемщику. Нередко учреждения готовы выдать займ без справок о заработной плате. Это дает возможность обратиться за займом даже тем, кто работает неофициально. Однако не следует забывать о потенциальных угрозах.
Следует внимательно подходить к выбору кредитной организации. Количество МФО на рынке довольно серьезное. Некоторые учреждения могут иметь не самые привлекательные условия. Поэтому целесообразно заранее изучить отзывы и условия предоставления займов.
Подводя итоги, можно сказать, что мелкие займы могут помочь в сложной финансовой ситуации. Но нужно всегда помнить о возможных последствиях. Необходимо тщательно проверять условия и репутацию кредитора. Так, вы сможете защитить себя от негативных последствий.
I am so grateful for the community that this blog has created It’s a place where I feel encouraged and supported
Hi there, You have done an excellent job. I
will certainly digg it and personally suggest to my friends.
I am sure they’ll be benefited from this site.
Если нужна более подробная инструкция, то она здесь:
Для тех, кто ищет информацию по теме “musichunt.pro”, там просто кладезь информации.
Смотрите сами:
https://musichunt.pro
Буду рад, если кому-то пригодится.
important site https://askthehive.org
Грузоперевозки Луганск Переезд Луганск: Организация переездов любой сложности. Мы поможем вам перевезти мебель, технику и личные вещи быстро и без хлопот.
see post https://alchemistai.lat
this page https://noon.pics/
YOURURL.com https://noon.gay
Excellent post. I absolutely appreciate this site.
Stick with it!
legiano
Unlock maximum excitement by using bonus sweet bonanza, where explosive visuals meet frequent reward opportunities in each session.
The Sweet Bonanza slot game has gained immense popularity among online casino enthusiasts. It offers colorful visuals along with thrilling gameplay that attracts many.
What makes Sweet Bonanza particularly appealing are its distinctive features. The game employs a cascading reel system, enabling players to achieve several wins with one spin.
Moreover, the game offers a free spins feature that enhances the gaming experience. This feature can lead to substantial payouts, making it even more enticing.
In conclusion, Sweet Bonanza stands out as an entertaining slot game. With its vibrant design and rewarding features, it appeals to both new and experienced players.
Обучение магии Экстрасенс Экстрасенсы обладают уникальными способностями, позволяющими им видеть то, что скрыто от обычного человека. Они могут предсказывать будущее, находить пропавшие вещи и людей, а также оказывать помощь в решении сложных жизненных ситуаций.
link https://cytonic.lat
like this https://alchemistai.lat
Не упустите возможность получить микрозайм на карту быстро и удобно!
Небольшие займы становятся все более популярными в современном мире. Небольшие кредиты привлекают внимание многих, и это неудивительно. Основной причиной этого является легкость получения. Оформление, как правило, занимает считанные минуты. Такой подход особенно важен для людей, находящихся в сложной финансовой ситуации.
Минимальные требования для получения займа также играют большую роль. Нередко учреждения готовы выдать займ без справок о заработной плате. Это позволяет развивать кредитование среди заемщиков с нестандартной занятостью. Тем не менее, стоит помнить о рисках.
Следует внимательно подходить к выбору кредитной организации. Существует множество микрофинансовых компаний. Некоторые из них могут предлагать невыгодные условия. Поэтому целесообразно заранее изучить отзывы и условия предоставления займов.
В завершение, небольшие займы могут стать отличным решением в трудной ситуации. Однако необходимо подходить к ним с осторожностью. Следует детально анализировать условия и репутацию компании перед тем, как принимать решение. Так, вы сможете защитить себя от негативных последствий.
Thanks for the article. Here’s more on the topic https://mehelper.ru/
I like reading a post that can make men and women think.
Also, thanks for allowing for me to comment!
https://rhino-de.com
Не упустите возможность получить а деньги на карту быстро и удобно!
Краткосрочные займы набирают популярность в наше время. Множество заемщиков предпочитает именно такой способ решения денежных вопросов. Одной из причин является простота оформления. Как правило, процесс оформления займов проходит очень быстро. Такая услуга особенно востребована у тех, кто нуждается в срочной денежной помощи.
Другой важный аспект — это минимальные требования к заемщику. Нередко учреждения готовы выдать займ без справок о заработной плате. Это открывает двери для заемщиков, которые не могут подтвердить официальный доход. Однако не следует забывать о потенциальных угрозах.
Важно тщательно выбирать кредитора. Рынок микрофинансовых организаций достаточно велик. Некоторые учреждения могут иметь не самые привлекательные условия. Поэтому стоит читать отзывы и изучать условия заранее.
Подводя итоги, можно сказать, что мелкие займы могут помочь в сложной финансовой ситуации. Но нужно всегда помнить о возможных последствиях. Следует детально анализировать условия и репутацию компании перед тем, как принимать решение. Так, вы сможете защитить себя от негативных последствий.
Thanks for the article. Here is a website on the topic – https://kanunnikovao.ru/
website link https://universalx.lat
Can you be more specific about the content of your article? After reading it, I still have some doubts. Hope you can help me. https://accounts.binance.com/el/register?ref=53551167
Thanks for the article. Here’s more on the topic https://mehelper.ru/
blog link https://prismagent.org/
like this https://askthehive.org
Эфирные масла для снятия стресса и тревоги Эфирные масла для улучшения сна и расслабления: Создайте атмосферу спокойствия и умиротворения с помощью эфирных масел, которые помогут вам заснуть и проснуться отдохнувшим.
my company https://heyanon.my/
try these out https://hyperunit.us
helpful resources https://exponent.my/
browse around this web-site https://hyperdrive.pw/
Грузоперевозки Луганск Поиск транспорта Луганск: Поиск транспорта для перевозки груза.
Source https://alchemistai.lat/
learn this here now https://blendfun.xyz
mostbet aviator demo mostbet aviator demo
купить айфон 8 в спб kupit-ajfon-cs3.ru .
company website https://nucleusearn.cc
1win token http://1win3027.com/
Hi there are using WordPress for your site platform?
I’m new to the blog world but I’m trying to get started and create my own. Do you need any coding expertise
to make your own blog? Any help would be
greatly appreciated!
https://cagliari-de.com
Recommended Reading https://heyanon.my/
Usually I do not read article on blogs, but I would like
to say that this write-up very compelled me to try and do it!
Your writing style has been surprised me. Thanks, very great article.
Наш агрегатор – beautyplaces.pro собирает лучшие салоны красоты, СПА, центры ухода за телом и студии в одном месте. Тут легко найти подходящие услуги – от стрижки и маникюра до косметологии и массажа – с удобным поиском, подробными отзывами и актуальными акциями. Забронируйте визит за пару кликов https://beautyplaces.pro/okrug/severo-vostochnyj-okrug/
From the insightful commentary to the captivating writing, every word of this post is top-notch. Kudos to the author for producing such fantastic content.
nanodefense utilizes a potent blend of meticulously chosen components aimed at enhancing the wellness of both your nails and skin..
Try the crazy time free game to get a feel for it!
завьялов илья поинт пей Завьялов Илья: PointPay – платформа для поддержки благотворительных инициатив в крипто-сфере
Профессиональная платная наркологическая клиника. Лечение зависимостей, капельницы, вывод из запоя, реабилитация. Анонимно, круглосуточно, с поддержкой врачей и психологов.
скачать макросы на варфейс на мышку Поднимите свой скилл в Warface с помощью макросы варфейс! Улучшите свою стрельбу, контролируйте отдачу и станьте настоящим профессионалом. Доминируйте в каждом бою и наслаждайтесь игрой!
Thanks for the article. Here’s more on the topic https://yarus-kkt.ru/
https://xfinder777.com/bat-yam/ – נערות ליווי בבת ים
1win ng http://1win3024.com/
potentstream is designed to address prostate health by targeting the toxic, hard water minerals that can create a dangerous buildup inside your urinary system.
рулонные шторы пятигорск купить Магазин штор Пятигорск: Широкий ассортимент и профессиональные консультации В магазинах штор Пятигорска вас ждет широкий выбор тканей, моделей и аксессуаров. Опытные консультанты помогут вам подобрать идеальные шторы, учитывая ваши пожелания и особенности интерьера.
stratos is a groundbreaking natural supplement crafted to elevate male vitality, energy, and performance.
завьялов илья поинт пей Завьялов Илья: Взаимодействие с Сообществом и Обратная Связь в Point Pay
hepatoburn is a premium nutritional formula developed to nurture liver vitality, elevate metabolic performance, and assist in natural fat loss.
Thanks for the article. Here’s more on the topic https://orenbash.ru/
These are actually impressive ideas in on the topic of blogging.
You have touched some pleasant points here. Any way keep up wrinting.
https://world-of-tanks-de.com
Wow, that’s what I was searching for, what a data!
present here at this blog, thanks admin of this site.
how to withdraw on 1win http://1win3025.com/
1win apk app download 1win apk app download .
Your positive energy and enthusiasm radiate through your writing It’s obvious that you are truly passionate about what you do
I completely agree with your perspective on this topic It’s refreshing to see someone presenting a balanced and thoughtful viewpoint
Thank you for sharing your personal experience and wisdom with us Your words are so encouraging and uplifting
автоматический карниз для штор elektrokarnizy10.ru .
potentstream is designed to address prostate health by targeting the toxic, hard water minerals that can create a dangerous buildup inside your urinary system.
Надежные решения для вертикальной транспортировки грузов на складах и производствах. Выбирайте современный ножничный подъемник от проверенного российского производителя с гарантией качества.
Подъемник ножничного типа считается одним из самых востребованных механизмов для подъема. Данное устройство гарантирует безопасность и эффективность при подъеме людей и грузов.
Одним из ключевых достоинств ножничного подъемника является его компактный размер и высокая маневренность. Это позволяет использовать их в помещениях с ограниченной высотой потолка и узкими проходами.
Следующий важный момент касается регулировки высоты, на которую можно поднять груз. Возможность настройки высоты делает их универсальными для различных типов работ.
Применение ножничных подъемников охватывает множество отраслей, от строительства до сферы услуг. Их удобство и безопасность делают их незаменимыми в работе.
I was able to find good information from your articles.
https://seven-de88.com
Let us know in the comments which of their posts has resonated with you the most.
Thanks for the article. Here’s more on the topic https://orenbash.ru/
Your posts are always so relatable and relevant to my life It’s like you know exactly what I need to hear at the right time
Your writing is so relatable and down-to-earth It’s like having a conversation with a good friend Thank you for always being real with your readers
военная служба по контракту Военная служба по контракту: современные тенденции В этом разделе рассматриваются современные тенденции развития военной службы по контракту в России и за рубежом.
Thank.
I have read so many posts concerning the blogger lovers but this post is in fact a good piece of writing, keep it up.
https://welle-de88.com
Thanks for the article. Here’s more on the topic https://stalker-land.ru/
Служба по контракту Контрактная служба: Современное вооружение и военная техника, обучение новым технологиям и методам ведения боя.
реальные мистические истории Мистическая жизнь – это жизнь, наполненная тайнами, загадками и необъяснимыми явлениями. Она привлекает тех, кто не боится заглянуть за грань обыденности и ищет ответы на вопросы, которые не дают покоя.
Cryptocurrency Payments Bazaar Drugs Marketplace: A New Darknet Platform with Dual Access Bazaar Drugs Marketplace is a new darknet marketplace rapidly gaining popularity among users interested in purchasing pharmaceuticals. Trading is conducted via the Tor Network, ensuring a high level of privacy and data protection. However, what sets this platform apart is its dual access: it is available both through an onion domain and a standard clearnet website, making it more convenient and visible compared to competitors. The marketplace offers a wide range of pharmaceuticals, including amphetamines, ketamine, cannabis, as well as prescription drugs such as alprazolam and diazepam. This variety appeals to both beginners and experienced buyers. All transactions on the platform are carried out using cryptocurrency payments, ensuring anonymity and security. In summary, Bazaar represents a modern darknet marketplace that combines convenience, a broad product selection, and a high level of privacy, making it a notable player in the darknet economy.
Greetings from Idaho! I’m bored to tears at work so I decided to browse
your website on my iphone during lunch break. I really like the information you provide
here and can’t wait to take a look when I get home. I’m amazed at
how fast your blog loaded on my cell phone ..
I’m not even using WIFI, just 3G .. Anyhow, amazing blog!
amunra
Гарантия на оборудование и выполненные монтажные работы. Закажите одномачтовый подъемник под ключ и получите полностью готовое к эксплуатации решение от профессионалов.
Одномачтовый подъемник является одним из самых популярных типов подъемного оборудования. Этот вид подъемника используется для выполнения множества задач.
Они обладают высокой степенью мобильности, что делает их удобными для использования. Эти устройства легко транспортировать и устанавливать.
Кроме того, компактные размеры подъемников делают их привлекательными для пользователей. Компактные размеры делают их идеальными для работы в стесненных условиях.
Несмотря на преимущества, этот вид подъемников также имеет некоторые недостатки. К примеру, их грузоподъемность часто бывает ограничена. Важно учитывать все характеристики при выборе подъемника.
Wow, that’s what I was exploring for, what a material!
existing here at this website, thanks admin of this site.
https://spinanga-de88.com
Thanks for the article. Here’s more on the topic https://stalker-land.ru/
This is one of my go-to blogs for inspiration Whether it’s fashion, travel, or self-improvement, you cover it all flawlessly
военная служба по контракту Пенсионное обеспечение военнослужащих по контракту: условия и размер выплат Военнослужащие, прослужившие определенный срок, имеют право на получение военной пенсии. Размер пенсии зависит от выслуги лет, воинского звания и оклада.
I’ve come across many blogs, but this one truly stands out in terms of quality and authenticity Keep up the amazing work!
Jogue agora o fortune tiger demo e descubra como é divertido sem gastar nada!
Hello, yes this post is truly pleasant and I have learned lot of
things from it concerning blogging. thanks.
https://favbet-de.com
I was able to find good information from your blog posts.
I want to to thank you for this great read!! I absolutely loved every bit of it.
I have got you book marked to look at new things you post…
https://bola88-live-id.com
Для съемок с высоким уровнем профессионализма стоит выбрать проверенных мастеров. У нас есть список популярные фотографы, которые давно заслужили признание.
Выдающиеся фотографы занимают особое место в мире визуального искусства. В этой статье мы рассмотрим несколько талантливых мастеров, которые вдохновляют и восхищают.
Первым стоит выделить имя, которое знакомо многим любителям искусства. Этот мастер создает удивительные образы, которые подчеркивают красоту и уникальность момента.
Следующим в нашем списке идет фотограф, чьи портреты всегда полны жизни и эмоций. Картины этого мастера выделяются особым стилем и умением запечатлеть индивидуальность.
В заключение стоит упомянуть мастера, который специализируется на съемке природы. Снимки этого фотографа поражают своей яркостью и детальной проработкой.
Погрузитесь в мир азартных игр с вавада онлайн казино и откройте для себя невероятные возможности выигрыша!
Vavadacasino.wuaze.com – это уникальная платформа для любителей азартных игр. Выбор игр на этой платформе впечатляет: от классических слотов до современных игр с живыми дилерами.
Одним из основных преимуществ является простота регистрации. Зарегистрироваться можно всего за несколько минут, что делает этот процесс доступным для всех. Сразу после регистрации пользователи могут внести депозит и приступить к игре.
На Vavadacasino.wuaze.com пользователи могут рассчитывать на множество щедрых бонусов и выгодных акций. Это отличный способ увеличить свой игровой банкролл и получить дополнительные возможности для выигрыша. Пользователи имеют возможность воспользоваться как приветственными предложениями, так и постоянными акциями.
Безопасность на Vavadacasino.wuaze.com стоит на первом месте. Вся информация пользователей надежно защищена с помощью передовых технологий шифрования. Таким образом, игроки могут быть уверены, что их данные в безопасности.
Good post. I am dealing with some of these issues as well..
https://Arema-FC-id.com
Güncel ve güvenilir deneme bonusu veren siteler listesi. En iyi bahis siteleri bonus fırsatlarıyla kazanmaya hemen başlayın.
their website https://handofgod.tech
Thanks very interesting blog!
useful source https://backwoods.buzz
паркетная доска эста паркет купить в Москве http://parketnay-doska2.ru/ .
why not find out more https://handofgod.tech/
Hi, Neat post. There is a problem together with your web site
in internet explorer, would test this? IE nonetheless
is the market leader and a huge portion of folks will omit your magnificent writing due to this problem.
Here’s more on the topic https://bediva.ru/
кайт хургада Кайт Египет: Откройте для себя кайт-жемчужины Красного моря. Хургада, Дахаб, Эль Гуна – выберите свой идеальный кайт-спот.
Du möchtest wissen, ob es möglich ist, im Online Casino Österreich legal zu spielen und welche Anbieter dafür infrage kommen? In diesem Artikel zeigen wir Spielern in Österreich, die sicher und verantwortungsbewusst online spielen möchten, Möglichkeiten ohne rechtliche Grauzonen zu betreten. Lies weiter, um die besten Tipps und rechtlichen Hintergründe zu entdecken: Online Casinos
I’m really loving the theme/design of your blog. Do you ever run into any web browser compatibility
issues? A number of my blog visitors have complained about my website not working correctly in Explorer but looks great in Opera.
Do you have any solutions to help fix this problem?
Madura United FC
visit this page https://angles.vip/
Прокат инструментов Экспертная оценка качества строительства.
official site https://sonex.cfd
article https://allstake.cc
like it https://lavarage.cc
Here’s more on the topic https://bediva.ru/
https://www.glicol.ru/
buy facebook account for ads marketplace for ready-made accounts website for selling accounts
продам капрелса Продам рецептурные препараты: Законодательство и последствия Продажа рецептурных препаратов – это сфера, находящаяся под особым контролем государства. Законодательство большинства стран строго регулирует оборот таких лекарственных средств, и нарушение установленных правил может повлечь за собой серьезные юридические последствия. Законные способы получения рецептурных препаратов: Посещение врача: Для получения рецептурного препарата необходимо обратиться к врачу, который проведет осмотр, поставит диагноз и выпишет рецепт. Аптека: Рецептурный препарат можно приобрести только в аптеке, имеющей соответствующую лицензию на фармацевтическую деятельность. Незаконные способы продажи и приобретения рецептурных препаратов: Продажа без рецепта: Продажа рецептурного препарата без предъявления рецепта является незаконной. Покупка через интернет без рецепта: Покупка рецептурного препарата через интернет без предоставления рецепта является незаконной и опасной. Продажа с рук: Продажа рецептурных препаратов с рук является незаконной. Риски незаконной продажи и приобретения рецептурных препаратов: Уголовная ответственность: Незаконная продажа рецептурных препаратов может повлечь за собой уголовную ответственность в виде штрафа, исправительных работ или лишения свободы. Административная ответственность: Нарушение правил продажи рецептурных препаратов может привести к административному штрафу. Нанесение вреда здоровью: Неправильное применение рецептурного препарата может нанести серьезный вред здоровью. Приобретение поддельных препаратов: При покупке рецептурных препаратов через незаконные каналы существует риск приобретения поддельных препаратов. Альтернативные варианты: Консультация с врачом: Если у вас остались неиспользованные рецептурные препараты, проконсультируйтесь с врачом о возможности их дальнейшего использования или утилизации. Утилизация: Рецептурные препараты, которые не подлежат дальнейшему использованию, необходимо правильно утилизировать.
приемка домов Тепловизионное обследование дома – выявление проблемных зон и утечек тепла, создайте уют!
https://uztm-ural.ru/catalog/tverdye-splavy/
This post is worth everyone’s attention. How can I find out more?
Borneo FC Samarinda
Have you ever considered creating an e-book or guest authoring on other blogs?
I have a blog based upon on the same information you discuss and would really like to have you share some stories/information. I know my audience
would value your work. If you’re even remotely interested,
feel free to shoot me an e-mail.
PSS Sleman
1win az qeydiyyat http://1win3040.com
спираль мирена показания спираль мирена
Химчистка мебели ростов Химчистка кресел Ростов – это не только эстетика, но и гигиена, удаление пылевых клещей и аллергенов.
купить профилированную трубу Профнастил: универсальный материал для строительства Профнастил – это востребованный строительный материал, который используется для кровли, облицовки стен, возведения заборов и других конструкций.
накрутка пф яндекс Накрутка ПФ Яндекс: Миф о мгновенном взлете или реальная опасность? Накрутка поведенческих факторов (ПФ) в Яндексе – это как игра с огнем. Кажется, что можно быстро добиться желаемого результата, но в итоге можно обжечься. Давайте разберемся, что на самом деле представляет собой накрутка ПФ и какие последствия она может повлечь.
https://aria32.ru/
лазерная резка на чпу лазерная резка металла услуги
типография спб типография заказать
buy fb ad account account trading accounts for sale
Thanks for the article. Here’s more on the topic https://bediva.ru/
Awesome! Its genuinely remarkable post, I have got much clear idea regarding from this post
Официальный интернет-магазин Miele предлагает премиальную бытовую технику с немецкой сборкой и сроком службы до 20 лет. В наличии и под заказ – оригинальные модели для дома с гарантией от официального поставщика. Быстрая и надежная доставка по Москве и всей России. Надёжность, качество и технологии Miele – для вашего комфорта каждый день: купить миле
служба по контракту оренбург Контрактная служба: Стабильность и социальные гарантии Служба по контракту – это гарантированная заработная плата, социальный пакет, включающий медицинское страхование, обеспечение жильем (служебным или компенсация за аренду), возможность получения образования и льготное пенсионное обеспечение.
важный ресурс http://sosal-vodkabet.com
прекрасный ресурс https://vodkawin.com/
накрутка пф яндекс Алгоритмы Яндекса: они видят все Поисковые алгоритмы постоянно совершенствуются. Яндекс научился выявлять накрутку ПФ с высокой точностью. Использование ботов и других “черных” методов гарантированно приведет к санкциям.
человечный вебресурс https://vodkawin.com/
типография официальный сайт типография цены
Saudacoes, entusiastas de jogos de azar!
Enquanto jogava em jogos virtuais de apostas, percebi que o segredo para um jogo eficaz e fazer um planejamento inteligente.
Guias que se tornaram uteis para mim:
http://battulalonline.com/betnacional-oficial-a-experiencia-do-apostador-2/
Esses materiais me ajudaram a jogar com mais eficiencia. Eles abordaram topicos como taticas de jogo ideais, o que me permitiu evitar erros. Se voce tambem quer jogar com mais consciencia, recomendo estudar os conselhos de especialistas. Esse e o seu momento chave rumo a um jogo confiante.
Desejo sucesso no jogo!
menovelle is a premium supplement crafted to help women navigate the physical and emotional shifts of menopause with greater ease.
Thank.
типография петербург типография санкт петербург
Keep your phone private while still being able to receive sms from anywhere. Our service is fast, secure, and requires no registration.
Receiving SMS messages is an essential part of modern communication. They allow us to stay connected with friends, family, and colleagues.
With the rise of technology, SMS has turned into a key communication tool for numerous individuals. SMS can be used for everything from alerts to updates.
However, some users face challenges with SMS delivery. Problems may stem from network issues, device configurations, or software errors.
To tackle these problems, individuals should verify their network connectivity and device settings. Updating the device software can also help improve SMS functionality.
лакомства для собак Как хранить сушеные лакомства: Продлеваем срок годности Сушеные лакомства необходимо хранить в сухом, прохладном месте, в герметичной упаковке, чтобы продлить срок годности.
добродушный ресурс https://vodkawin.com
человечный ресурс https://worldthegame.com
типография типография напечатать
hepato burn is a premium nutritional formula developed to nurture liver vitality, elevate metabolic performance.
специалист лазерной эпиляции https://creatorro.ru/
узд аппарат https://kupit-uzi-apparat15.ru/ .
פנה אלי והבנתי שמשהו עומד לקרות עכשיו. הוא שאל, ” את מאושרת?”ובמקום לשקר, פשוט משכתי בכתפי. ואז הקשה לתוך הכוס שלי, גנחתי. תנועותיו נעשו גסות יותר, מתמידות יותר. אחרי שזיינתי אותי למעלה, עשיתי look at here now
отчет по практике кондитер отчеты по практике студентов
הסתכלתי בלי משים על התלתל וכמעט נחנקתי: גוש שיער שלם באמת בולט מתחת לגזיו, ומתחת נראה תלולית ליקקה חלק מהשפתיים, וזה המחווה סיימה את מקס. הוא תפס את ראשה, כמה תנועות פתאומיות, והאורגזמה שלו עיסוי אירוטי לגבר
Ola, amigos!
Enquanto jogava em jogos virtuais de apostas, percebi que o segredo para um bom aproveitamento e seguir um plano claro.
Guias que se tornaram indispensaveis para mim:
https://digitallegacymarketing.com/online-casino-nederland-zonder-cruks/online-casino-nederland-zonder-cruks-maak-kennis/
Esses materiais me ajudaram a melhorar minhas chances. Eles abordaram topicos como taticas de jogo ideais, o que me permitiu entender como o sistema funciona. Se voce tambem quer jogar com mais consciencia, recomendo explorar os aspectos teoricos. Esse e o seu ponto de partida rumo a um estrategia vencedora.
Que a sorte esteja com voce!
онлайн сделать реферат сколько стоит реферат
купить диплом в кургане занесением в реестр купить диплом в кургане занесением в реестр .
Bom dia, jogadores!
Enquanto jogava em maquinas caca-niqueis, percebi que o chave para um jogo eficaz e fazer um planejamento inteligente.
Artigos que se tornaram importantes para mim:
http://gesztenyeskertvendeghaz.starjan.hu/?p=492742
Esses materiais me ajudaram a melhorar minhas chances. Eles abordaram topicos como taticas de jogo ideais, o que me permitiu jogar com mais confianca. Se voce tambem quer jogar com mais consciencia, recomendo aprender com a experiencia de outros jogadores. Esse e o seu primeiro passo rumo a um estrategia vencedora.
Que a sorte esteja com voce!
В Адлере аренда катера поможет вам сменить обстановку, забыть о суете и насладиться ощущением свободы, которое дарит только открытое море https://yachtkater.ru/
мировой веб ресурс https://vodkacasino.net/
хорошенький веб ресурс https://vodkawin.com
Ищете незабываемый тур на Камчатку? Организуем увлекательные путешествия по самым живописным уголкам полуострова: вулканы, горячие источники, медведи, океан и дикая природа! Профессиональные гиды, продуманные маршруты и комфорт на всём протяжении поездки. Индивидуальные и групповые туры, трансфер и полное сопровождение: стоимость тура на камчатку
заказ дипломной работы https://diplomnazakaz-online.ru
сайты для написания диплома где заказать дипломную работу
Hello, gambling enthusiasts!
While playing virtual gambling games, I realized that the foundation to winning is a clear approach.
Guides that became important to me:
https://amaocean.com/2025/06/19/fonbet-38/
These materials helped me improve my odds. They covered topics like slot RTP, which allowed me to avoid mistakes. If you also want to master strategies, I recommend learning from other players’ experience. It’s your important phase toward a winning strategy.
May luck be on your side!
עליון וקעקוע שנראה מסקרן עוד יותר באור הבוקר. התיישבתי בכיסא וצפיתי בו מכין קפה. תנועותיו היו רצתה אלא לחוות עיסוי ארוטי בעצמה. – תחת עסיסי וחזק! את יפהפייה, קארינה! – אההה. תזיין אותי! מותק! דירה דיסקרטית בראשון לציון
Good day, players!
While playing virtual gambling games, I realized that the secret to successful gaming is a clear approach.
Articles that became important to me:
https://www.theasiantiger.com/2025/06/19/novibet-138/
These tips helped me minimize risks. They covered topics like machine volatility, which allowed me to avoid mistakes. If you also want to master strategies, I recommend exploring theoretical aspects. It’s your important phase toward a winning strategy.
Play smart and enjoy the process!
https://certainlysensible.com/index.php/User:VirgieWechsler9
стоматологические клиники центры https://stomatologiya-arhangelsk-1.ru .
Слив платных прогнозов бесплатно Слив платных прогнозов бесплатно: Возможность или обман? Многие ищут способ получить доступ к платным прогнозам бесплатно, надеясь на легкий заработок. Однако стоит ли доверять подобным предложениям и каковы риски?
Eğlencenin adresi olan piabella casino adresi her zaman yeni kullanıcılarını beklemektedir. Sizler de Piabellacasino sitesine üye olarak hoşgeldin kampanyaları eşliğinde eşsiz vakitler geçirebilirsiniz.
Mine Island is a thrilling slot game in India, offering an adventurous mining theme with exciting rewards: play mine island game online for free
https://theterritorian.com.au/index.php?page=user&action=pub_profile&id=2099625
Hello stewards of pure serenity!
The best air filters for pets work best when replaced regularly, ensuring optimal performance every season. Top rated air purifiers for pets are often ENERGY STAR certified, helping you save on electricity bills too. A HEPA-certified best air purifier for pet allergies captures even microscopic particles that escape normal filters.
If you have a heavy-shedding pet, the best air purifier for pet hair is essential. It reduces hair accumulation on electronics and curtains best air purifier for petsAnd it works best when combined with regular grooming.
Cat Air Purifier Designed to Reduce Allergies and Hair Shedding – п»їhttps://www.youtube.com/watch?v=dPE254fvKgQ
May you enjoy remarkable wellness-infused zones !
https://medium.com/@charlielevesque328/%EB%B9%84%EC%95%84%EA%B7%B8%EB%9D%BC-%EA%B5%AC%EB%A7%A4-%EA%B0%80%EB%8A%A5%ED%95%9C-%EC%98%A8%EB%9D%BC%EC%9D%B8-%EC%95%BD%EA%B5%AD-%EC%B6%94%EC%B2%9C-best-5-58d737e68170
http://xtp.jingyunys.top/home.php?mod=space&uid=149845&do=profile&from=space
https://support.ourarchives.online/index.php?title=User:CaitlinStaley4
מפוזרים על הרצפה. לנקה המשיכה לשכב על המיטה, עכשיו לא מתביישת בו בכלל, נותנת לו ללא בושה לאהוב את רצועת עור שזופה מעל חגורתו. לנה התרוממה על מרפקיה, חשה את שדיה מושכים את בד הביקיני. היא ידעה סקס ירושלים
https://systemcheck-wiki.de/index.php?title=Benutzer:DelorasBarnett1
Каркас металлический для гаража Фермы для ангара Прочные фермы для ангара – основа для создания просторного и надежного помещения для хранения техники, оборудования или зерна. Различные типы ферм позволяют реализовать проекты любой сложности.
גם אני חושב כך. כאילו לא לבד. למחרת הכל כבר עבר לה. רק שהנחיתות פחדו משניהם. עוקפים אותם. קרני לא. אבל אתה רוצה לדעת? השהה. נשימתו של נסטיה גברה. מה אעשה? – היא כבר לא התנגדה, רק חיכתה great article
багги н новгород багги н новгород .
Консультации-гуманитарная защита, статус беженца. Гражданство, паспорт Кипра, Евросоюза, ЕС. Воспользуйтесь благоприятным налоговым климатом и стратегическим расположением Кипра, получив кипрский паспорт. Узнайте о программе инвестиционного гражданства и других способах получения паспорта ЕС. Кипр – ваш ключ к успеху в бизнесе!
Excellent post. Keep posting such kind of info
on your blog. Im really impressed by it.
Hi there, You have done a great job. I’ll definitely digg it and individually suggest to
my friends. I’m sure they’ll be benefited from this web site.
Thanks for the article. Here’s more on the topic https://up-top.ru/
как купить диплом с проведением как купить диплом с проведением .
купить диплом украины с занесением в реестр http://www.arus-diplom34.ru .
Hi there, all is going nicely here and ofcourse every
one is sharing facts, that’s actually excellent, keep up writing.
https://dobrowin-br.net
של ורדים. או ניצן שושן שלא נפתח. הכוס של זלטה היה כמו איריס. רציתי לדחוף את סטאס ולהצמיד את זלטה סוטה, חולה, אבל רק שלהם… 30. פילגש ללא בלמים ועיסוי ארוטי מרינה היא פסיכולוגית. חיוך בהיר. article
Here’s more on the topic https://kinocirk.ru/
Стоимость на каркасный дом под ключ в спб цена зависит от метража, фундамента и отделки. Получите подробную смету от наших специалистов.
В последнее время каркасные дома привлекают всё больше внимания среди людей, желающих построить жильё. Каркасные дома имеют множество плюсов, включая короткий срок постройки и отличные теплоизоляционные свойства.
Основным преимуществом каркасных конструкций является их доступная цена. Строительство каркасного дома снижает общие затраты как на материалы, так и на трудозатраты.
Кроме того, каркасные дома легко адаптируются под различные климатические условия. С их помощью вы сможете создать комфортное жильё как в холодных, так и в тёплых регионах.
Тем не менее, каркасные дома не лишены недостатков, о которых стоит помнить. К примеру, они могут быть менее устойчивыми к пожарам по сравнению с кирпичными строениями. Это следует учитывать при выборе типа жилья.
ссылка на сайт кракен даркнет маркет
1win afiliados 1win3048.com
Thank.
Please let me know if you’re looking for a article author for your blog.
You have some really good articles and I feel I would be a good asset.
If you ever want to take some of the load off, I’d love to write
some material for your blog in exchange for a link back to mine.
Please send me an email if interested. Cheers!
https://betleao-brasil.com
https://v-tagile.ru/obschestvo-iyul-5/kak-vybrat-idealnyj-buket-dlya-zhenshchiny-ot-povoda-do-yazyka-tsvetov
צרח, וסרגיי הבין שהוא גומר בפנים, ממלא אותה בזרע טרי. לנה שכבה מתנשפת, חזה עולה ויורד, וטפטוף לבן שהוא יעשה משהו מטורף בשבילו. תורי הגיע שוב. בחרתי בפעולה, ומקס, מביט בי ישר בעיניים, אמר: – נשקי you can try these out
Если ищете, где можно смотреть UFC в прямом эфире, то этот сайт отлично подойдёт. Постоянные трансляции, удобный интерфейс и высокая скорость загрузки. Всё работает стабильно и без рекламы: https://mma-fan.ru/
What’s Going down i am new to this, I stumbled upon this I have
discovered It absolutely helpful and it has aided
me out loads. I am hoping to give a contribution & help other users
like its aided me. Good job.
https://pinnacle-br.com
הליכה של זונה ברצועה מצא שימוש נוסף: בחור אחד מסיע אותה ברצועה על ארבע במעגל שעליו יושבים שאר והושיטה יד לתחתונים כדי להלביש אותם. אבל זה מדובלל, תפס אותם וגרר אותה. קמתי ולבשתי את התחתונים מכון ליווי בירושלים כדי להעשיר את הביקור
Here’s more on the topic https://kinocirk.ru/
I think this is among the most significant info for me.
And i am glad reading your article. But want to remark on some general things,
The site style is wonderful, the articles is really excellent :
D. Good job, cheers
גרם לתומאס לעשות זאת. היא שאלה אותו מדוע הוא עשה זאת ותומאס סיפר לה על אהבתו. ואז אליזבת ריחמה זמנית של שלישייה בשלושה חורים, וגם להכנסת שני זרגים לכוס בבת אחת. גם הזונה הייתה מכוסה בחגורה חדרים דיסקרטיים בחיפה
бесплатные прогнозы на ставки http://prognozy-na-sport-3.ru/ .
обмен криптовалют обменники Обмен криптовалюты bestchange Перед обменом лучше сравнить предложения.
пояснения https://vodkawin.com/
I’ve been browsing on-line greater than 3 hours nowadays, but I never discovered any attention-grabbing article like yours.
It’s beautiful price sufficient for me. In my opinion, if all site owners and bloggers made excellent content
material as you did, the net shall be much more useful than ever before.
brdice
Thanks for the article. Here’s more on the topic https://l-spb.ru/
pia bella casino giriş adresi canlı bahis imkanlarıyla oyuncularına keyifli dakikalar yaşatmaktadır. Canlı bahis kısmından blackjack tarzı oyunlara kolayca erişebilirsiniz.
веб-сайте https://vodkacasino.net/
здесь https://vodkawin.com
view publisher site russian traditional clothing
Thank you, I have just been searching for
information about this topic for a while and yours is the
greatest I’ve found out so far. But, what
concerning the bottom line? Are you positive about the supply?
wingdus
In fact no matter if someone doesn’t be aware of then its up to other viewers that they will help, so here it occurs.
https://apostaganhabet-br.com
click here for info russian traditional clothing
official statement russian traditional clothing
Home Page russian traditional clothing
https://sibgazpribor.ru
дешевая перегородка Душевые кабины из стекла — это не только практичное, но и стильное решение для ванных комнат. Они легко вписываются в любой интерьер, от классики до хайтека, создавая современный и чистый вид. Дешевая перегородка
click reference russian traditional clothing
I am really impressed with your writing skills as well as with the layout on your weblog.
Is this a paid theme or did you customize it yourself?
Anyway keep up the excellent quality writing, it’s rare to see a nice blog like this one these days.
Go here https://bsumc.info/hello-world/
nanodefense Pro utilizes a potent blend of meticulously chosen components aimed at enhancing the wellness of both your nails and skin.
Thanks for the article. Here is a website on the topic – https://kanunnikovao.ru/
Dragon money Dragon money – это мир, где виртуальные деньги становятся ключом к власти и влиянию.
Официальный Telegram канал Live Сasinо. Кaзинo и ставки от лучших площадок. Доступны актуальные зеркала официальных сайтов. Регистрируйся в понравившемся, соверши вход, получай бонус используя промокод и начни играть!
https://t.me/s/iGaming_live
Goedemorgen, liefhebbers van online gokken!
Na het proberen van verschillende goksites ontdekte ik dat lalabet casino echt het ultieme Nederlandse online casino is.
Waarom? Omdat Lalabet snel uitbetalend is en perfect aansluit op Nederlandse voorkeuren.
Ontdek de webpagina van casino Lalabet via de link die je hieronder vindt:
review lalabet
Spelen hier is een spannende belevenis!
Dit is jouw startpunt richting een winnende strategie.
Maak er iets moois van!
Согласен с предыдущим оратором, и в дополнение хочу сказать:
Хочу выделить раздел про detoxa.ru.
Вот, можете почитать:
https://detoxa.ru
Спасибо, что дочитали до конца.
Thanks for the article. Here is a website on the topic – https://kanunnikovao.ru/
У нас актуальные каркасные дома цены без скрытых платежей. Получите смету по вашему проекту и начните строительство уже в этом сезоне.
Каркасный дом становится всё более популярным выбором для строительства жилья. Такие дома имеют ряд преимуществ, таких как скорость строительства и высокая энергоэффективность.
Одним из главных плюсов каркасного дома является его экономичность. С помощью каркасных технологий можно минимизировать расходы на материалы и рабочую силу.
Также каркасные дома могут быть легко настроены под любые климатические условия. С их помощью можно строить комфортное жильё для проживания в любых климатических зонах.
Тем не менее, каркасные дома не лишены недостатков, о которых стоит помнить. Например, по сравнению с кирпичными домами, каркасные имеют меньшую огнестойкость. Эти факторы стоит учитывать, принимая решение о строительстве.
https://woodhouse72.ru
online kazino ilə evdən oynamağın rahatlığı!
breathe is a plant-powered tincture crafted to promote lung performance and enhance your breathing quality
строительство домов под ключ проекты https://www.stroitelstvo-doma-1.ru .
Освойте методы эффективного продвижения и анализа сайтов в рамках курсы seo оптимизации, предназначенных для повышения профессионального уровня.
Рост популярности курсов по SEO заметен среди новых владельцев бизнеса. Участники курсов получают знания о том, как правильно оптимизировать сайты для появления в топах поисковиков.
Освоение азов SEO является ключевым моментом на пути к эффективному продвижению. В рамках обучения рассматриваются вопросы выбора ключевых слов, написания контента и формирования ссылочной массы.
Практическое применение полученных знаний в реальных проектах значительно увеличивает их эффективность. Участники курсов работают с реальными проектами, что помогает им лучше подготовиться к будущей работе.
Сертификаты, выдаваемые по завершении обучения, могут стать хорошим дополнением к резюме. Эти сертификаты могут стать важным фактором при трудоустройстве в сфере интернет-маркетинга.
Thanks for the article. Here’s more on the topic mirka-master.ru .
O app da obabet foi feito sob medida
para você. A instalação é automática e rápida.
Você tem acesso rápido a depósitos e saques. Com suporte 24h via app.
Цилиндрический подшипник Виброустойчивые подшипники Виброустойчивые подшипники предназначены для работы в условиях повышенной вибрации.
Go web-site https://www.templates-preview.com/wordpress/flextop/product/marshall-major-ii-on-headphones-black/
Заказать дипломную работу diplomikon.ru/ недорого и без стресса. Выполняем работы по ГОСТ, учитываем методички и рекомендации преподавателя.
best online slots payout percentage usa, how to win at roulette uk and new casinos Swedish Online Casinos uk, or united kingdom roulette betting strategy
Nada melhor que apostar com conforto, o app da https://imperadorbet-br.com é a
solução perfeita. Instale de forma prática, aproveite as atualizações recentes.
A performance está mais rápida do que nunca.
Salut, passionnes de jeux en ligne !
Je viens de trouver une analyse recente avec les dernieres infos sur le jeu Plinko dans les sites francais.
Si tu veux tout savoir sur ce jeu, cette lecture est faite pour toi.
Decouvre tout cela via le lien ci-dessous :
https://immodentity.de/2025/06/23/plinko-free-a-fun-and-engaging-game-experience-2/
Amuse-toi avec les infos !
Гидроизоляция зданий https://gidrokva.ru и сооружений любой сложности. Фундаменты, подвалы, крыши, стены, инженерные конструкции.
Salutations, joueurs !
Je viens de trouver une analyse recente avec des details tout frais sur le jeu Plinko chez les joueurs francais.
Si tu veux tout savoir sur ce jeu, cette lecture est fortement conseillee.
Decouvre tout cela via le lien qui suit :
http://www.wildadventurenepal.com/plinko-casino1/plinko-casino-dive-into-the-excitement-of-digital/
Profite bien !
piabella casino giriş adresi birbirinden eğlenceli ve kazançlı oyunları ile kullanıcılarına keyifli anlar geçirtmeye devam etmektedir. Sen de piabella ailesine dahil olarak bu eğlenceye ortak olabilirsin
мелбет казахстан скачать мелбет казахстан скачать
Мы предлагаем типовые и индивидуальные деревянный дом под ключ проекты и цены, которые можно адаптировать под ваши цели и участок.
Деревянные дома под ключ становятся все более популярными среди владельцев загородной недвижимости. Деревянные дома очаровывают своим естественным видом и экологическими свойствами.
Главное преимущество деревянных домов заключается в быстроте их строительства. Современные технологии позволяют возводить такие здания в кратчайшие сроки.
Деревянные дома также отличаются высокой теплоизоляцией. Зимой в таких домах комфортно и тепло, а летом всегда свежо и прохладно.
Уход за деревянными домами довольно прост и не требует больших усилий. Периодическая обработка древесины защитными составами значительно увеличивает долговечность дома.
A nova atualização do app está imperdível.
Interface muito mais agradável. Tudo isso com a segurança que você já
conhece. Baixe agora.
this link https://blonwoquis.com
Ты готова изменить свое тело и настроение? Присоединяйся к каналу онлайн тренер, где ты найдешь персональные тренировки дома, питание без жестких диет и мотивацию каждый день. Начни свой путь к идеальной форме прямо сейчас!
have a peek at this web-site https://ternalvitlu.com
лечебное голодание Голодание при диабете: Контроль уровня сахара в крови
moved here https://gamingservicesofclubs.com/
you could try these out https://gamingservicesofclubs.com
Hello There. I found your blog using msn. This is a very well written article.
I will make sure to bookmark it and return to read more of your useful information. Thanks for the post.
I will certainly return.
Где купить подшипники Подобрать подшипник по размерам Подбор подшипника по размерам – ключевой этап при замене детали.
Você está procurando uma casa de apostas que valoriza seus novos jogadores?
Então a curso beta é perfeita para você.
Cadastre-se gratuitamente e receba 100 dólares em bônus para começar
sua jornada nas apostas esportivas e no cassino online.
A plataforma oferece suporte ao cliente em português, métodos
de pagamento locais e jogos de alta qualidade. Seja para
apostar em futebol, roleta ou blackjack, você já começa
com saldo extra para arriscar com inteligência.
next https://vgamesuper.com/
great site https://gamezonebig.com
https://gidro-vanna-dush.ru
Подшипники изготовитель Завод изготовитель подшипников – это сердце производства, где рождаются подшипники, обеспечивающие работу машин и механизмов по всему миру. Посещение завода позволяет увидеть процесс производства и убедиться в качестве продукции.
косметический ремонт двухкомнатной квартиры под ключ косметический ремонт двухкомнатной квартиры под ключ .
Continued https://pinballkinggame.com/
купить диплом в москве о высшем образовании купить диплом в москве о высшем образовании .
additional resources https://gemtechgaming.com/
Aposte a qualquer hora usando o app da https://580-bet.com. Baixe direto no seu smartphone.
O layout foi redesenhado pensando em você. Aposte com praticidade e
segurança.
Ты готова изменить свое тело и настроение? Присоединяйся к каналу онлайн тренер для женщин, где ты найдешь персональные тренировки дома, питание без жестких диет и мотивацию каждый день. Начни свой путь к идеальной форме прямо сейчас!
Thank.
Bahis Siteleri 2025 listesiyle, 250 güvenilir bahis sitesinden deneme bonusu kazanın ve hemen kazanmaya başlayın
visit the website https://superfunslotssuper.com
втб платежи в китай Оплата из России в Китай – это процесс перевода денежных средств российским покупателем китайскому поставщику за товары или услуги. Он требует соблюдения валютного законодательства и использования надежных систем международных платежей.
купить лестницу на заказ купить лестницу на заказ .
https://uraldo.ru
Thanks for the article. Here’s more on the topic mirka-master.ru .
Learn More Here https://wawacsi.com/
Заказать диплом https://diplomikon.ru быстро, надёжно, с гарантией! Напишем работу с нуля по вашим требованиям. Уникальность от 80%, оформление по ГОСТу.
Отчёты по практике https://gotov-otchet.ru на заказ и в готовом виде. Производственная, преддипломная, учебная.
Оформим реферат https://ref-na-zakaz.ru за 1 день! Напишем с нуля по вашим требованиям. Уникальность, грамотность, точное соответствие методичке.
Диплом под ключ https://diplomnazakaz-online.ru от выбора темы до презентации. Профессиональные авторы, оформление по ГОСТ, высокая уникальность.
Thank.
https://rusekodom.ru
Here’s more on the topic https://kinocirk.ru/
реестр платежных агентов Moneyport перевод – это услуга, предоставляемая Moneyport, которая позволяет осуществлять международные переводы денежных средств быстро, безопасно и с выгодными комиссиями.
Заказать диплом https://diplomikon.ru быстро, надёжно, с гарантией! Напишем работу с нуля по вашим требованиям. Уникальность от 80%, оформление по ГОСТу.
Оформим реферат https://ref-na-zakaz.ru за 1 день! Напишем с нуля по вашим требованиям. Уникальность, грамотность, точное соответствие методичке.
Отчёты по практике https://gotov-otchet.ru на заказ и в готовом виде. Производственная, преддипломная, учебная.
Диплом под ключ https://diplomnazakaz-online.ru от выбора темы до презентации. Профессиональные авторы, оформление по ГОСТ, высокая уникальность.
https://ukvd43.ru
Solpot Casino brings you high RTP slots Ready to win Play now at solpot.xl-gamers.com https://solpot.xl-gamers.com Experience seamless gaming on Solpot Casino: Enjoy a smooth and uninterrupted gaming experience on Solpot Casino’s user-friendly platform. Navigate effortlessly and immerse yourself in high-quality gameplay.
Надёжный шестигранник стальной востребован в машиностроении и строительстве, обеспечивая прочность и точность изделий.
Металлопрокат является основой для многих промышленных процессов. Металлопрокат используется в строительстве, производстве и даже в бытовых нуждах. Разнообразие металлопроката позволяет находить решения для самых различных потребностей.
К основным видам металлопроката относятся алюминий, сталь и другие металлические сплавы. У каждого типа металлопроката есть свои достоинства и недостатки. Сталь известна своей прочностью, в то время как алюминий выгодно отличается легкостью и стойкостью к коррозии.
Способы обработки также влияют на классификацию металлопроката. Металлопрокат может быть представлен в виде горячекатаных, холоднокатаных и профилированных изделий. Выбор способа обработки зависит от конкретных требований и условий эксплуатации.
Важные аспекты при покупке металлопроката включают тип, качество и поставщика. Качество металлопроката может значительно влиять на итоговый результат и долговечность конструкции. Рекомендуется сотрудничать только с надежными производителями и тщательно проверять все сертификаты.
Выбирая дом каркасный под ключ, вы получаете готовое к проживанию пространство, созданное по современным стандартам, с учетом климата и индивидуальных пожеланий.
Каркасные дома приобрели огромную популярность среди застройщиков и покупателей. Они предлагают множество преимуществ, таких как быстрая сборка и высокая теплоизоляция.
При строительстве каркасного дома важно учитывать качество используемых материалов. Нельзя экономить на таких элементах, как утеплитель и облицовка.
Важно учитывать проект и габариты при выборе каркасного дома. Хорошо продуманный проект обеспечит удобное и функциональное использование пространства.
В итоге, каркасный дом может стать идеальным вариантом для вашего будущего жилья. Также, его строительство не требует существенных временных и материальных ресурсов.
https://santehmen.ru
the top online pokies and beste casinos für roulette 2025; Corazon, in united states legit,
semyon dusaach blackjack and poker mat nz, or best united statesn online gambling
Наш агрегатор – beautyplaces.pro собирает лучшие салоны красоты, СПА, центры ухода за телом и студии в одном месте. Тут легко найти подходящие услуги – от стрижки и маникюра до косметологии и массажа – с удобным поиском, подробными отзывами и актуальными акциями. Забронируйте визит за пару кликов https://beautyplaces.pro/kirzhach/
Wow! This blog looks exactly like my old one! It’s on a totally different subject but it has pretty much the same page layout and design. Superb choice of colors!
Here’s more on the topic https://kinocirk.ru/
Яркий день, наполненный новыми впечатлениями, легко устроить, выбрав прогулки на катере в сочи. Наслаждайтесь морским путешествием с комфортом и стилем.
Прогулки по морю в Сочи предлагают незабываемые впечатления. Каждый год тысячи туристов выбирают этот курорт для создания незабываемых воспоминаний.
На набережной Сочи можно найти множество предложений по организации морских прогулок. Посетители могут выбрать как короткие экскурсии, так и длительные путешествия вдоль побережья.
Прогулки по морю дарят возможность увидеть великолепные пейзажи Черного моря и гор. Также есть возможность увидеть дельфинов и другие морские обитатели.
Обязательно возьмите с собой камеру, чтобы сохранить яркие моменты вашего отдыха. Прогулки на море – замечательный способ провести время с близкими.
esims for travel e sim france
https://177m.ru
sky dancer casino
References:
https://kcmcleaning.com/?p=1014
https://www.glicol.ru/
tunica mississippi casinos
References:
https://talkzambia.com/product/woo-logo-hoody-black/
https://prochistka.su
buy esim for china buy esim turkey
https://geolexpert.ru
Groetjes, online casino fans !
Ik heb net een exclusieve update gevonden met de meest recente gegevens over buitenlandse online casino’s op de Nederlandse markt.
Als je alles wilt weten over deze platforms, dan is dit zeker de moeite waard.
Open alles via de link onderaan:
buitenlandsecasino.org
Geniet ervan!
Ola, entusiastas de jogos de azar!
Enquanto jogava em maquinas caca-niqueis, percebi que o chave para um bom aproveitamento e fazer um planejamento inteligente.
Guias que se tornaram uteis para mim:
https://tec2000.com.hr/apostas-seguras-e-diversao-com-betnacional/
Esses materiais me ajudaram a melhorar minhas chances. Eles abordaram topicos como taticas de jogo ideais, o que me permitiu entender como o sistema funciona. Se voce tambem quer aprimorar suas habilidades, recomendo estudar os conselhos de especialistas. Esse e o seu ponto de partida rumo a um sucesso.
Que a sorte esteja com voce!
https://dom-servis2.ru
Ola, jogadores!
Enquanto jogava em maquinas caca-niqueis, percebi que o fundamento para um desempenho bem-sucedido e ter as estrategias certas.
Artigos que se tornaram importantes para mim:
https://megaopt.dp.ua/betnacional-apostas-e-diversao-em-um-so-lugar/
Esses analises me ajudaram a jogar com mais eficiencia. Eles abordaram topicos como taticas de jogo ideais, o que me permitiu jogar com mais confianca. Se voce tambem quer dominar estrategias, recomendo aprender com a experiencia de outros jogadores. Esse e o seu ponto de partida rumo a um sucesso.
Que a sorte esteja com voce!
bearing manufacturer tapered roller bearing: Conquer both radial and axial loads with tapered roller bearings, designed to handle combined forces with exceptional efficiency. Featuring tapered rollers and raceways, these bearings provide optimal load distribution and smooth operation under demanding conditions. Ideal for automotive axles, gearboxes, and other applications requiring robust load-carrying capacity.
Отдохнуть в кругу друзей на яхте с отличным обслуживанием поможет сочи прогулка на яхте цена. Всё для вашего комфорта и запоминающегося отдыха.
Сочи – идеальное место для морских прогулок, наполненных яркими эмоциями. Сочи привлекает внимание миллионов путешественников, стремящихся к расслаблению и приключениям.
На набережной Сочи можно найти множество предложений по организации морских прогулок. Гости курорта могут наслаждаться как короткими, так и длительными прогулками вдоль живописного побережья.
Морские прогулки открывают захватывающие виды на волны и окружающие горы. Некоторые экскурсии предлагают шанс увидеть дельфинов и других животных в их естественной среде обитания.
Не упустите шанс сделать фотографии, которые будут напоминать о вашем путешествии. Прогулки на море – замечательный способ провести время с близкими.
Mental Health Mental Health .
porno
https://www.glicol.ru/
https://aylita.ru
Море солнце и яхта — всё что нужно для запоминающегося отдыха в Сочи: ужин на яхте адлер
Нужен дом? услуги по строительству домов — от проекта до отделки. Каркасные, кирпичные, брусовые, из газобетона. Гарантия качества, соблюдение сроков, индивидуальный подход.
Консоль Sony PlayStation 5 подарит качественный игровой опыт с доступом к последним новинкам.
Apple – один из ведущих брендов в области технологий. Ассортимент продукции Apple включает в себя множество устройств, таких как iPhone, iPad и Mac.
Инновационный дизайн продукции Apple – один из ключевых факторов ее успеха. Apple всегда нацелена на повышения удобства пользования и функциональности своих товаров.
Кроме того, экосистема Apple создает уникальный опыт для пользователей. Товары Apple отлично взаимодействуют друг с другом, упрощая процесс использования.
Хотя цены на продукцию Apple могут быть высокими, они все равно пользуются популярностью. Потребители ценят качество, надежность и инновационные технологии, которые предлагает компания.
Нужен дом? https://stroitelstvo-domov-kazan1.ru — от проекта до отделки. Каркасные, кирпичные, брусовые, из газобетона. Гарантия качества, соблюдение сроков, индивидуальный подход.
pillow block bearings BBCR: “Bearing Brand Code Registry” or similar] The Bearing Brand Code Registry serves as the definitive source for verifying the authenticity and traceability of bearings. By utilizing the BBCR database, you can mitigate the risk of encountering counterfeit products, ensuring compliance with industry standards and safeguarding the integrity of your operations.
Thanks for the article. Here is a website on the topic – https://kreativ-didaktika.ru/
Thanks for the article. Here’s more on the topic https://svetnadegda.ru/
купить диплом с занесением реестра купить диплом с занесением реестра .
работа с карточками товара sео wildbеrriеs: Специфика SEO для Wildberries.
Just as the planet is not short of bass slots, so Big Bass Hold & Spinner Megaways is not short of features. What it’s got is Fish Money symbols, Mystery symbols, free spins, a Hold & Spin Bonus, and bonus buys. If you’ve played one Big Bass Bonanza-related slot, it’s not so much a case of necessarily having played them all, but they do tend to share similarities. One critical aspect is their generally friendly, cheerful, relaxing vibe. The colours are bright, the soundtrack bubbly, making easing into them an effortless process. Big Bass Bonanza Hold & Spinner looks like it might be played in a lake or river, as the frog, dragonflies, and foliage up top would suggest. This might not be big game fishing out on the open sea, but there are plenty of fish swimming about in the watery area in the background to whet appetites.
https://www.vanbijnkers.nl/uncategorized/sweet-bonanza-xmas-slot-review-austrian-player-experiences/
By working through this detailed list of sweepstakes casinos, you can pick the platform that fits your preferences, whether it’s fast gameplay, big coin packs, or strong mobile performance. Our personal preference is Mega Frenzy. Each social casino reviewed here operates legally, offers fair reward systems, and brings something unique to the table. Whether you’re new to sweeps casinos or just looking for a better fit, this list keeps you on the right track. Which is the best online casino with no deposit bonus? We keep track of international lottery developments to make sure everything featured on our website is a fact, buffalo king megaways game review rtp and strategy from a crumbling stone temple to Medusas lair. With this slot from 2023, it also gives way to some questionable gambling services and unlicensed operators.
Сочи предлагает большой выбор яхт для аренды — от компактных моделей до просторных судов с каютами, капитаном и всей необходимой инфраструктурой: аренда яхт в адлере
браслет планеты Браслет планеты: браслет, связанный с планетой-покровителем, поможет усилить положительные влияния и гармонизировать энергию.
Вот здесь подробно расписано, как это сделать:
Хочу выделить раздел про reactive.su.
Ссылка ниже:
https://reactive.su
Рад был поделиться информацией.
Bonjour, amis !
Je viens de trouver un contenu exclusif avec les donnees les plus recentes sur le jeu Plinko en France.
Si tu es fan de ce jeu, cette lecture est incontournable.
Decouvre tout cela via le lien place en bas :
http://www.gourmetpie.co.uk/plinko-le-jeu-passionnant-des-tirages-a-elements/
Profite bien !
Thanks for the article. Here is a website on the topic – https://kreativ-didaktika.ru/
Ищещь секс видео с русскими девочками? тогда вот тебе сайтик с русскими порно онлайн и бесплатно!Русское порно
Thanks for the article. Here’s more on the topic https://svetnadegda.ru/
Salut, joueurs !
Je viens de trouver une analyse recente avec des details tout frais sur le jeu Plinko en France.
Si tu t’interesses a Plinko, cette lecture est fortement conseillee.
Lis tout cela via le lien suivant :
https://cbce.websiteseguro.com/conbrace21/2025/06/23/plinko-free-dive-into-excitement-2/
Amuse-toi avec les infos !
стенд для выставки Изготовление стендов в Москве: Гарантия качества и надежности Изготовление стендов в Москве – это гарантия качества и надежности. Многие компании имеют большой опыт работы и используют современные технологии, чтобы создавать стенды, которые соответствуют самым высоким стандартам.
https://voda-pravo.ru
web
siam aero
I’ve been using thc tincture ordinary seeing that all about a month nowadays, and I’m indubitably impressed at near the positive effects. They’ve helped me judge calmer, more balanced, and less solicitous from the beginning to the end of the day. My saw wood is deeper, I wake up refreshed, and uniform my nave has improved. The trait is excellent, and I appreciate the accepted ingredients. I’ll positively preserve buying and recommending them to everyone I identify!
BETFLIK ที่สุด เกมส์ยิงปลา สล็อต คาสิโน มาใหม่ มาแรง https://betflik13.pro/
pop over to this web-site siam aero
go to my blog siam aero
Когда требуется уборка генеральная квартиры, важно выбрать проверенного исполнителя. Мы используем профессиональные средства и подходим к работе ответственно.
Процесс генеральной уборки представляет собой существенное событие для в бытовом обиходе. Такой процесс способствует поддерживать порядок и уют в квартире.
Планирование — ключ к успешной генеральной уборке. Сначала определите, какие зоны вы хотите убрать. Разделив работу на этапы, вы снизите вероятность путаницы.
Кроме того, важно подготовить необходимые средства. Чистящие средства, тряпки и пылесос — это основные вещи. Хорошая подготовка позволит сэкономить время.
Теперь, когда все необходимое под рукой, можно переходить к уборке. Работайте поочередно в каждой комнате. Так будет легче увидеть результаты своих трудов.
Going Here
siam aero
Case study intro: buy followers twitter; includes before/after analytics shots.
Before you ask friends to binge your content, read the section on when to safely buy likes on tiktok without tripping filters.
I avoided online casinos for a while because of scams. Then I came across the best casino online on Reddit and finally had a good experience with real bonuses.
Лучший аналог порнохабу!!тут классное анальное порнохабу, Русское порнуха в hd! порно анал смотреть онлайн
Надёжный заказ авто заказать авто с аукциона. Машины с минимальным пробегом, отличным состоянием и по выгодной цене. Полное сопровождение: от подбора до постановки на учёт.
go to my blog
siam aero
изготовление выставочных стендов москва Стенд для выставки: Создание уникального пространства для взаимодействия Стенд для выставки – это специально организованное пространство, предназначенное для представления компании и ее продукции целевой аудитории. Он должен быть функциональным, удобным и привлекательным, обеспечивая комфортное взаимодействие с посетителями и эффективную демонстрацию преимуществ предлагаемых товаров и услуг. Дизайн стенда должен соответствовать фирменному стилю компании и отражать ее ценности.
australian online casino bonus codes 2021, casinos online canada and casinos that accept paypal how to get free chips in big win casino
australia, or netent no deposit bonus nz
можно ли купить в школе аттестат за 11 класс https://arus-diplom25.ru .
Интересная новость: Персики для здоровья и красоты: 5 причин добавить их в свой рацион
Полезная статья: Пышные оладьи из тыквы: рецепт для всей семьи
Читать подробнее: Что делать, если не работает брелок сигнализации: способы отключения автосигнализации
легально купить диплом о легально купить диплом о .
https://yjspic.top/space-uid-75884.html
Купить диплом ВУЗа!
Мы предлагаем дипломы психологов, юристов, экономистов и других профессий по приятным ценам— diplomus-spb.ru
https://iti.vnu.edu.vn/mediawiki/index.php?title=Th%C3%A0nh_vi%C3%AAn:ThaoBone185742
1win գրանցում https://www.1win3074.ru
kraken официальные ссылки
Mega сайт
Интересные статьи: Почему сохнут кончики листьев комнатных растений: спасаем цветок дома
porn live.
Статьи обо всем: Стрижка итальянка после 40: секреты молодости и стиля
Читать статью: Здоровье мужчины: какие анализы важны для профилактики
Everyone loves it whenever people get together and share opinions.
Great website, stick with it!
Новое и актуальное: Фейс-массаж: развенчиваем мифы и раскрываем секреты красивой кожи
https://thepostersparadise.wiki/index.php?title=User:RQAGregg44624
https://dragonballpowerscaling.com/index.php/User:JeanRooks537510
как поставить бесплатную ставку на винлайн https://www.winlayne-fribet1.ru .
Мы можем предложить документы любых учебных заведений, расположенных в любом регионе России. Приобрести диплом о высшем образовании:
где можно купить аттестат 11
Thanks for the article. Here’s more on the topic https://imgtube.ru/
1win armenia 1win armenia
porno
Mega онион
Виниловый ламинат http://www.napolnaya-probka1.ru/ .
Hi there, casino lovers !
I just found a detailed analysis of online casinos available on the Greek market.
If you want reliable information, this review is a must-read.
Access it via the following link:
https://malikaenglishschool.edu.np/fonbet-casino-90/
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 1293 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом университета — ответим быстро, без лишних формальностей.
купить обложку для аттестата 11 купить обложку для аттестата 11 .
AME Capitals Отзывы AME Capitals – это не просто брокер, это надежный партнер, который заботится о своих клиентах.
Thanks for the article. Here’s more on the topic https://remonttermexov.ru/
Yeni başlayanlar üçün bonuslu kazino platformaları əla fürsətdir. Xoş gəldin bonusları ilə risk etmədən oyunları sınaya bilərsiniz.
Hello, online gaming fans !
I just found an amazing review of online casinos with bonuses for Greek players.
If you want reliable information, this review is totally worth checking out.
Take a look via the following link:
https://www.accounts.inc1.co.za/page-530/
Платформа позволяет удобно сравнить лучшие фотографы по качеству, опыту и подходу. Каждый профиль содержит примеры съёмок и реальные оценки.
Выдающиеся фотографы занимают особое место в мире визуального искусства. В этой публикации мы обсудим ряд выдающихся фотографов, чьи снимки оставляют неизгладимое впечатление.
Первым стоит выделить имя, которое знакомо многим любителям искусства. Данный фотограф умеет ловить моменты, запечатлевая их во всей красе.
Не менее талантливым является фотограф, известный своим мастерством в портретной фотографии. Этот фотограф способен создать снимки, передающие характер и настроение модели.
Завершающим пунктом нашего обзора станет фотограф, который известен своими пейзажами. Снимки этого фотографа поражают своей яркостью и детальной проработкой.
Наслаждайтесь солнцем, морем и свободой передвижения — прокат яхт сочи позволяет вам строить маршрут на свой вкус.
Прокат яхты — замечательный способ насладиться морскими приключениями. Все больше людей предпочитают проводить отпуск на яхте.
Получение яхты в аренду может показаться сложной задачей. Но при наличии информации, все станет намного проще.
В первую очередь, стоит выбрать маршрут вашей поездки. Это поможет вам выбрать нужный размер и тип яхты.
Наконец, не забудьте внимательно прочитать условия аренды. Внимательное изучение условий аренды предотвратит нежелательные проблемы.
взять займ онлайн онлайн микрозайм
оформить микрозайм онлайн взять микрозайм онлайн
Читать полностью: Шампунь для волос: как выбрать и правильно использовать – советы экспертов красоты
взять займ онлайн займ денег онлайн
porno pics milf
Pinco onlayn kazino mobil üçün ideal platformadır.
Pinco kazinosunun mobil versiyası istənilən cihazda işləyir.
Pinco apk yükləmək sadə və təhlükəsizdir.
Pinco casino azərbaycan təhlükəsizlik baxımından tam uyğundur.
Pinco apk yükləyərək rahatlıqla giriş edə bilərsiniz.
Pinco kazinosunda hər zövqə uyğun oyun var.
Pinco casino az müştəri dəstəyi çox operativdir.
Pinco onlayn kazinoda seçimlər sonsuzdur.
Pinco promo code ilə daha çox bonus qazan pinco casino azərbaycan.
kraken darknet market
sms bomber usa
mostbet download mostbet download .
Mega сайт
купить аттестат за 11 класс в москве купить аттестат за 11 класс в москве .
Deneme bonusu veren sitelerin en güncel listesi burada. Güvenilir bahis siteleri ve en cazip deneme bonusu fırsatlarıyla kazancınızı artırın
bomber sms
Автомобили на заказ заказать авто из китая. Работаем с крупнейшими аукционами: выбираем, проверяем, покупаем, доставляем. Машины с пробегом и без, отличное состояние, прозрачная история.
have a peek at this web-site https://latch.icu/
have a peek at this web-site https://kikifinance.cc
Надёжный заказ авто https://zakazat-avto44.ru с аукционов: качественные автомобили, проверенные продавцы, полная сопровождение сделки. Подбор, доставка, оформление — всё под ключ. Экономия до 30% по сравнению с покупкой в РФ.
Thanks for the article. Here’s more on the topic https://imgtube.ru/
Мы можем предложить дипломы любой профессии по приятным тарифам. Купить диплом в Копейске — kyc-diplom.com/geography/kopejsk.html
Мы готовы предложить документы любых учебных заведений, которые находятся на территории всей Российской Федерации. Купить диплом любого университета:
как купить аттестат за 11 класс
see this page https://kikifinance.xyz/
Решили закажи авто купить под ключ: подбор на аукционах, проверка, выкуп, доставка, растаможка и постановка на учёт. Честные отчёты, выгодные цены, быстрая логистика.
Хочешь авто https://prignat-avto1.ru? Мы поможем! Покупка на аукционе, проверка, выкуп, доставка, растаможка и ПТС — всё включено. Прямой импорт без наценок.
article https://extended-exchange.xyz
more tips here https://aera.lat
see this site https://latch.icu/
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 4745 клиентов воспользовались услугой — теперь ваша очередь.
На сайте — ответим быстро, без лишних формальностей.
see it here https://aera.lat/
мосбет мосбет
Если вы ищете нестандартный формат досуга, яхты аренда — это удобное решение, сочетающее в себе уют и природную красоту.
Аренда яхты — это замечательный способ провести время на воде. Можно выбрать по своему вкусу: от яхт с высокой скоростью до комфортных катеров.
Прежде чем взять яхту в аренду, стоит внимательно рассмотреть варианты. Каждая компания предлагает различные условия аренды, включая цены и дополнительные услуги.
Обязательно проверьте все условия, прежде чем заключать контракт. Вы должны знать, какие услуги включены в стоимость аренды, а какие могут потребовать дополнительных затрат.
Аренда яхты — это шанс провести время с друзьями или семьей и насладиться природой. Неважно, планируете ли вы спонтанный отдых или заранее запланированное мероприятие, яхта будет прекрасным местом.
Эффективное решение для перемещения тяжелых грузов между этажами. Надежный грузовой подъемник – незаменимый помощник на вашем производстве.
Современные строительные проекты не обходятся без подъемного оборудования. С помощью подъемного оборудования можно быстро и безопасно перемещать тяжелые предметы.
Разнообразие подъемного оборудования впечатляет: от подъемников до кранов и эскалаторов. Выбор типа подъемного оборудования зависит от задач и условий эксплуатации, что делает его разнообразным.
Перед использованием подъемного оборудования необходимо провести его технический осмотр. Это гарантирует безопасность работы и предотвращает возможные несчастные случаи.
Правила эксплуатации подъемного оборудования необходимо строго придерживаться для обеспечения безопасности. Правильное следование инструкциям позволяет избежать серьезных инцидентов.
Mega онион
click this over here now https://sailor.wtf/
important source https://zoth.my/
https://www.fundable.com/-909
http://ilianicolaevichzavialov.ru/
https://frasesmotivacional.com/
микрозайм онлайн без процентов микрозайм онлайн без процентов .
процентный вклад https://www.deposit-kg.ru .
Hello. And Bye.Bonjour, amis !
Si vous cherchez des sites fiables en France, alors c’est exactement ce qu’il vous faut.
Lisez l’integralite via le lien en bas de page :
https://cleanswipe.pro/netbet-1010/
авто из китая Подержанные авто из Китая: выгодная покупка или кот в мешке? Рассматриваем плюсы и минусы покупки подержанного китайского автомобиля и даем советы по выбору.
аттестат за 11 класс купить в чите аттестат за 11 класс купить в чите .
Hello. And Bye.Salut, amis !
Si vous cherchez des sites fiables en France, alors c’est exactement ce qu’il vous faut.
Consultez l’integralite via le lien suivant :
https://cyclurba.fr/forum/342934/specialized-gaston-son-in-me-dernier-bh-carbon-moteur-pana-36v.html?from=1700&discussionID=15374&messageID=342934&rubriqueID=80&pageprec=
Lubisz kasyna online i automaty do gry? Zarejestruj się na slottica jak wypłacić pieniądze i zgarnij nagrody powitalne!
Нужна душевая кабина? магазин душевых кабин: компактные и просторные модели, стеклянные и пластиковые, с глубоким поддоном и без. Установка под ключ, гарантия, помощь в подборе. Современный дизайн и доступные цены!
nba 直播
感受籃球的每一個精彩瞬間,就在這裡!我們致力於為全球籃球愛好者提供最優質的NBA直播服務,讓您無論身在何處,都能即時觀看每一場激動人心的比賽。從例行賽到季後賽,從全明星賽到總冠軍賽,我們全程直播,絕不錯過任何精彩時刻。
Нужна душевая кабина? душевые кабины недорого: компактные и просторные модели, стеклянные и пластиковые, с глубоким поддоном и без. Установка под ключ, гарантия, помощь в подборе. Современный дизайн и доступные цены!
Everything you do with crypto is safer with Trezor in the middle.
US trezor web wallet
купить аттестат за 11 купить аттестат за 11 .
Here’s more on the topic https://voenoboz.ru/
купить офисную мебель от производителя стол для руководителя
http://xn--80aafabrjladsicc1amg1o4cf1dg.online/
След като изпробвах различни платформи за хазарт, открих, че Inbet казино е наистина топ казиното за българи.
Защо? Защото Inbet е лесно за ползване и предлага най-новите игри.
Посетете основния сайт на платформата Inbet чрез линка, който ще намерите по-долу:
inbet casino
I appreciate the effort that goes into creating high-quality content, and this post was no exception. The insights and information were top-notch and made for a really engaging read. Keep up the great work!
I love how this blog promotes self-love and confidence It’s important to appreciate ourselves and your blog reminds me of that
где купить аттестат за 11 класс омск где купить аттестат за 11 класс омск .
Lubisz kasyna online i automaty do gry? Zarejestruj się na http://slottica-kasyno.org.pl/ i zgarnij nagrody powitalne!
Welkom, vrienden!
Na het proberen van verschillende platforms voor kansspelen ontdekte ik dat online casino lalabet echt het beste is voor Nederlandse spelers.
Ontdek de hoofdsite van casino Lalabet via de link onderaan:
main page
Salutations, passionnes de jeux en ligne !
Je viens de trouver un article avec les donnees les plus recentes sur le jeu Plinko sur le marche francais.
Si tu veux tout savoir sur ce jeu, cette lecture est a ne pas rater.
Accede a tout cela via le lien place en bas :
https://stayhome.palwakf.ps/plinko-casino1/plinko-the-game-of-chance-and-fun-21/
Reste a jour !
доставка товаров из Китая ЖД доставка грузов из Китая – это золотая середина между скоростью и стоимостью. Этот способ подходит для крупных партий товаров, когда сроки не критичны, но важна экономия. Важно тщательно планировать маршрут и оформлять все необходимые документы для беспрепятственного прохождения через границы.
Salutations, joueurs !
Je viens de trouver un article avec les dernieres infos sur le jeu Plinko en France.
Si tu souhaites suivre les tendances, cette lecture est a ne pas rater.
Consulte tout cela via le lien place en bas :
https://stephassist.fr/plinko-the-exciting-game-of-chance-52/
Bonne lecture !
Комедия детства смотреть фильм один дома — легендарная комедия для всей семьи. Без ограничений, в отличном качестве, на любом устройстве. Погрузитесь в атмосферу праздника вместе с Кевином!
Продвижение сайта https://team-black-top.ru в ТОП Яндекса и Google. Комплексное SEO, аудит, оптимизация, контент, внешние ссылки. Рост трафика и продаж уже через 2–3 месяца.
Чистота начинается с комплексного подхода — ген уборка квартиры позволит освежить обстановку и создать здоровый микроклимат.
Генеральная уборка — это важный процесс, который помогает поддерживать чистоту и порядок в доме. Неизбежно наступает момент, когда требуется произвести генеральную уборку в доме.
Прежде всего, необходимо решить, какие комнаты требуют более тщательной уборки. Выбор помещения может зависеть от уровня загрязненности или вашей личной предрасположенности.
Подготовьте все нужные принадлежности, так уборка пройдет быстрее и эффективнее. Промышленные чистящие средства, тряпки, ведра и пылесос — всё это вам пригодится.
Создание детального плана уборки — залог эффективного результата. Каждый уголок требует внимания, если вы хотите, чтобы уборка действительно была генеральной.
Нужна душевая кабина? душевые кабины в минске лучшие цены, надёжные бренды, стильные решения для любой ванной. Доставка по городу, монтаж, гарантия. Каталог от эконом до премиум — найдите идеальную модель для вашего дома.
Here’s more on the topic https://voenoboz.ru/
Why stout.lat
Collateral Control
Manage LTV stake stDUSX and secure your mint strategy
Multi Token Support
Earn with DUSX veSTTX STTX and claim mirror based value
Liquid Vaults
Lock and unlock LP points boost APY and follow unlock timelines
Community Powered
Telegram Docs and DeFi mirror tools to grow the protocol
Enter decentralized liquidity control with https://stout.lat
Why Choose tempestfinance.cc
AI Arbitrage Engine
Smart routing and yield optimization powered by protocol-level algorithms
LP and LRT Yield
Deploy liquidity and earn from real-time APR on USDC ETH and rswETH
Tempest Vaults
Access structured vaults with adjustable risk and profit logic
Transparent Protocol
Track TVL APR and profits live across the Tempest dashboard
Start earning with automation at https://tempestfinance.cc
Купить тепловизор с доставкой по России (+ ЛНР, ДНР) Противоосколочные саперные костюмы: гарантия безопасности при выполнении работ.
Читать далее https://poker-agent.org
посмотреть на этом сайте https://krak-37.at/
Why Choose allstake.cc
Omnichain Staking
Stake across BTC SOL NEAR and more from one interface
Real APY
Monitor value performance and yield across the ecosystem
Secure and Audited
Backed by audit ready contracts and wallet level permissions
Campaign Ready
Earn points and rewards from ongoing web3 staking campaigns
Stake once earn everywhere at https://allstake.cc
What Makes cortexprotocol.org Unique
AI Integration
CX agents execute swaps optimize trades and adjust strategies
Cross Chain Bridge
Bridge assets across ETH BASE and SOL with full conversion support
Yield Optimized
Earn yield through token conversion and multi protocol exposure
Smart Trading
Create automated plans with Cortex agent and real data
Explore next level trading at https://cortexprotocol.org
посетить сайт https://kra36at.at/
What Makes rate-x.xyz Different
Full DeFi Engine
Trade stake earn and farm through one secure exchange
Restaking Mechanism
Boost returns with JLP based liquidity restaking logic
Referral Points
Grow your earnings through share and earn referral system
Real Time Overview
Track orders APY balance and liquidity across all positions
Enter the rate x ecosystem at https://rate-x.xyz
Why Choose defi-money.cc
GYD Stablecoin
Pegged for onchain reliability and integrated with smart leverage protocols
Borrow and Stake
Open long or short positions supply assets or stake for passive yield
Onchain Clarity
All pool rates TVL and protection mechanisms are verifiable and open
Modular Access
Works across CRVUSD smoney and other market primitives
Structured yield backed by protocol logic only at https://defi-money.cc
What Sets handofgod.tech Apart
HOG Based Yield
Stake HOG earn GHOG and monitor price through the dashboard
Sanctum and Garden
Each realm offers unique pool rewards and supply multipliers
AI Powered
Use Hog OS and AI agent tools to guide portfolio strategy
Liquidity Pools
Participate in Hand of God DeFi with stablecoin farming and lock unlock support
Stake with divine logic at https://handofgod.tech
After exploring various gaming portals, I discovered the best review of Netbet casino, highlighting why it’s truly the top casino for Greeks.
Go to this detailed review on online casino Netbet via the link you’ll find below:
https://maithaofood.com/casino-netbet-700/
What Makes avantprotocol.org Different
Live Metrics
View APY TVL and vault value without leaving your dashboard
Wallet Integration
Connect and manage positions across all liquidity and earn modules
Stable Yield
Mint savUSD and lock in predictable returns via decentralized mechanisms
Built for Growth
Use Avant Protocol to balance liquidity yield and portfolio strategy
Track and earn at https://avantprotocol.org
After exploring various gaming portals, I discovered an in-depth look of online casino Netbet, highlighting why it’s truly the ideal option for Greeks.
Discover this insightful analysis on Netbet Casino via the link at the bottom:
https://e-storeservice.com/2025/07/21/casino-netbet-700/
Always a pleasure reading your informative and detailed articles! I’d also encourage your readers to explore https://medimexicorx.shop/ for more insights.
What Makes defi-money.cc Different
App Ready
Borrow stake or launch new positions through the defi money app
Full Transparency
Analytics dashboards on Dune Paragraph and GitHub available to all users
Flexible Markets
Engage with base orb or arb strategies through dynamic smart contracts
Community-Linked
Join via Telegram Discord or X for updates and launch announcements
Control every move with https://defi-money.cc
Why allstake.cc
Restaking Protocol
Earn more through structured restake loops and APY optimization
Community Enabled
Track blogs dogs campaigns and points from one interface
Bridge and Exchange
Move assets through secure chain bridges and DEX connections
All Assets All Chains
Stake BTC ETH SOL and more in a single economy
Expand your staking potential at https://allstake.cc
Why Choose backwoods.buzz
Play to Earn
Fight explore and earn real crypto through web3 gameplay
NFT Integration
Mint gear stake tokens and build your power balance
Crystal Economy
Spend and trade inside a treasury based on rewards and points
Solana Powered
Fast battles low fees and scalable adventure
Enter the game world at https://backwoods.buzz
What Makes tempestfinance.cc Different
Step-by-Step Guide
Understand how it works with an integrated protocol walkthrough
Wallet Integration
Connect instantly and deploy capital with full onchain transparency
Earning Made Simple
Earn yield via vaults arbitrage routes and LRT-backed positions
Live Metrics
Track revenue profit and TVL across pools and portfolios
Maximize your DeFi potential on https://tempestfinance.cc
What Makes allstake.cc Different
App Based Simplicity
Launch stake unstake and monitor assets in a few clicks
Cross Chain Engine
Use one tool for all major staking chains and DeFi connections
Reward Focused
Earn from campaigns Jito points blogs and long term value
Security First
Audited systems with bridge tracking and chain level security
All your staking tools now live at https://allstake.cc
страница https://kra36at.at/
Why Choose avantprotocol.org
savUSD Yield Layer
Mint and earn with the stable asset designed for sustainable DeFi returns
LP Pools and Liquidity
Supply to Avant liquidity pools and optimize for yield and TVL
Protocol Transparency
Track all metrics APY and vault values through a unified dashboard
Secure and Connected
Connect your wallet stake or withdraw with full onchain control
Start earning smarter with https://avantprotocol.org
подробнее https://krak-37.at
Why swapx.buzz
LP Farming
Stake earn and track position from one dashboard
veSWPx Boost
Vote and control swap rewards based on stake weight
NFT and xNFT
Connect your wallet and manage xNFT governance assets
Decentralized Flow
Swap tokens earn rewards and withdraw anytime
Maximize your earning with https://swapx.buzz
What Makes tempestfinance.cc Different
Step-by-Step Guide
Understand how it works with an integrated protocol walkthrough
Wallet Integration
Connect instantly and deploy capital with full onchain transparency
Earning Made Simple
Earn yield via vaults arbitrage routes and LRT-backed positions
Live Metrics
Track revenue profit and TVL across pools and portfolios
Maximize your DeFi potential on https://tempestfinance.cc
Why backwoods.buzz
GameFi Economy
Balance trading staking and fighting inside one crypto ecosystem
NFT Minting
Mint weapons gear and upgrade mecha through in game achievements
Airdrop Ready
Complete challenges and get rewarded with crystals tokens and fees
Community First
Play with others and track your hero’s progress in a living Solana world
Adventure meets crypto at https://backwoods.buzz
focusbiathlon.com – news about biathlon, calendar biathlon world cup and standings
займ оформить деньги онлайн займ
Химчистка мебели ростов
Why Choose cortexprotocol.org
CX Agent
AI powered assistant for trading execution and conversion
Multi Chain Ready
Bridge ETH SOL BASE and CX across DeFi positions
Watchlist Tools
Track token performance and set alerts in your dashboard
Token Research
Use deep search and Cortex Ask to explore price trends and liquidity
Trade smarter on https://cortexprotocol.org
Часто читаю и слежу за выходом новостей на tellmi.ru.
Хотите быть в курсе событий? Читайте актуальные события в России и мире – здесь
Архитектурное бюро официальный сайт https://arhitektura-peterburg.ru
водопонижение водопонижение .
Hey, what’s up? Discover capital-efficient DeFi with BentoBox and Kashi on SushiSwap.
sushi DEX
sushiswaps-app-welcome.com
Güncel ve güvenilir deneme bonusu veren siteler listesi. En iyi bahis siteleri bonus fırsatlarıyla kazanmaya hemen başlayın
Thanks for the article. Here’s more on the topic https://mehelper.ru/
Thanks for the article. Here’s more on the topic https://taya-auto.ru/
Стеклянные перегородки Стеклянные ограждения для балконов и лоджий в многоквартирных домах: улучшение внешнего вида здания и защита от ветра. Виды стекла, крепления, монтаж.
обычный тепловизор магазины тактического снаряжения краснодар В Краснодаре есть множество магазинов, предлагающих тактическое снаряжение.
Thanks for the article. Here’s more on the topic https://taya-auto.ru/
https://servicestat.ru/service-nnv Servicestat.ru — это удобный каталог-рейтинг сервисных центров по ремонту электроники. На сайте собраны контакты (адреса, телефоны), отзывы клиентов, акции и скидки, а также оценки качества услуг. Пользователи могут быстро найти проверенные мастерские в своем городе, сравнить рейтинги и выбрать лучший вариант. Полезен для тех, кто хочет отдать технику в надежные руки.
? Поиск сервисов по местоположению и брендам
? Реальные отзывы и оценки клиентов
? Акции, скидки и спецпредложения
? Удобный фильтр для сравнения услуг
Идеальный помощник в поиске надежного ремонта!
Ищете, где хранить продукты при низкой температуре? Вам подойдёт холодильная камера – практичное и надёжное решение для бизнеса и дома https://камера-холодильная.рф/
The sagacity in this ruined is exceptional. https://proisotrepl.com/product/propranolol/
walewska.ru
водопонижение грунтовых вод https://водопонижение-77.рф/
скачать музыку на телефон скачать музыку на телефон .
https://graph.org/Complete-Guide-to-Free-Zones-06-19
https://graph.org/Complete-Guide-to-Free-Zones-06-19
пластиковые окна пвх http://www.alfa-okno.ru/ .
водопонизительная скважина http://vodoponizhenie-msk.ru/ .
слушать и скачать музыку бесплатно и без регистрации мп3 слушать и скачать музыку бесплатно и без регистрации мп3 .
You’ve got amazing knowlwdge on this site.
https://www.telewizjamazury.pl
окна пвх в москве окна пвх в москве .
Really desired to mention I am just thrilled I came on your website!
https://www.polskibiznes24.pl
walewska.ru
Ищете, где хранить продукты при низкой температуре? Вам подойдёт холодильная камера – практичное и надёжное решение для бизнеса и дома, оформите заказ по ссылке https://камера-холодильная.рф/
I’m thrilled to share that I’ve found the fresh Instagram profile for Netbet GR! This is the perfect place for connecting with the Greek Netbet community.
Head over to the newest social hub of Netbet GR via the following link:
http://www.instagram.com/netbet.greece
Bonjour, passionnes de jeux en ligne !
Je viens de trouver une analyse recente avec les dernieres infos sur le jeu Plinko dans les sites francais.
Si tu t’interesses a Plinko, cette lecture est a ne pas rater.
Accede a tout cela via le lien qui suit :
http://capitaledgeaccountants.com/?p=5621
Bonne lecture !
Salutations, passionnes de jeux en ligne !
Je viens de trouver un contenu exclusif avec des details tout frais sur le jeu Plinko en France.
Si tu souhaites suivre les tendances, cette lecture est fortement conseillee.
Accede a tout cela via le lien place en bas :
https://dmsassociates.com.au/plinko-jeux-une-aventure-ludique-fascinante-6/
Amuse-toi avec les infos !
I love this website – its so usefull and helpfull.
https://www.oto-praca.pl
Your blog post had me hooked from the very beginning!
deneme bonusu veren siteler yatırım yapmadan platformları keşfetme ve kazanç elde etme imkanı sunar. Bu eşsiz fırsatlar, kullanıcıların oyunları riske girmeden tecrübe etmesine olanak tanırken, aynı zamanda güvenilir casino sitelerini deneyimleme şansı sunar.
Betbaba bonus kampanyalarıyla kazancını artır, güvenli ödeme yöntemleriyle oyna.
Sultanbet’te bonuslarla kazancınızı artırın, mobil uyumlu siteyle her yerde oynayın.
Akcebet, canlı bahis ve casino severlere özel kampanyalarla dolu bir dünya sunuyor.
Yeni giriş adresiyle Casinomega’ya hemen bağlan, heyecanı kaçırma!
система водопонижения иглофильтрами https://водопонижение-77.рф/
Курс по плазмолифтингу https://prp-ginekologiya.ru в гинекологии: PRP-терапия, протоколы, показания и техника введения. Обучение для гинекологов с выдачей сертификата. Эффективный метод в эстетической и восстановительной медицине.
Курс по плазмотерапии прп терапия обучение с выдачей сертификата. Освойте PRP-методику: показания, противопоказания, протоколы, работа с оборудованием. Обучение для медработников с практикой и официальными документами.
Hi there every one, here every person is sharing such
familiarity, so it’s fastidious to read this weblog, and I
used to visit this webpage daily.
saif zone dubai ramla saif zone
Why tempestfinance.cc
Protocol Clarity
All yield flows APR and positions are verifiable and tracked live
Support Ready
Access help documentation contact forms and real-time updates
Secure Infrastructure
Built with transparency and efficiency across deposits withdrawals and arbitrage routes
Modular Ecosystem
Integrates with ambient scroll swell and rswETH environments
Earn from strategy not speculation with https://tempestfinance.cc
Why cortexprotocol.org
CX Infrastructure
Buy CX convert assets and research via Cortex Deep Search
Secure Wallet Tools
Connect and manage your balance positions and trades
Agent Automation
AI agent that acts on your behalf using live data
Onchain Research
Access code documentation and real time protocol stats
Trade with insight at https://cortexprotocol.org
Интересная статья: Коллекция Porsche: редкие экземпляры в гараже украинского энтузиаста
Why backwoods.buzz
GameFi Economy
Balance trading staking and fighting inside one crypto ecosystem
NFT Minting
Mint weapons gear and upgrade mecha through in game achievements
Airdrop Ready
Complete challenges and get rewarded with crystals tokens and fees
Community First
Play with others and track your hero’s progress in a living Solana world
Adventure meets crypto at https://backwoods.buzz
Читать статью: Шум в ушах: причины и что делать, если звенит в ухе
What Makes allstake.cc Different
App Based Simplicity
Launch stake unstake and monitor assets in a few clicks
Cross Chain Engine
Use one tool for all major staking chains and DeFi connections
Reward Focused
Earn from campaigns Jito points blogs and long term value
Security First
Audited systems with bridge tracking and chain level security
All your staking tools now live at https://allstake.cc
Why Choose handofgod.tech
Multi Realm Structure
Stake and earn through Elysium Garden Purgatory and Sanctum
TVL Tracking
Monitor token price HOG supply and pool liquidity live
Farm and Claim
Earn HOG GHOG and points from dashboard actions and AI signals
Sonic Integration
Move assets with speed and interact with liquidity across Hand of God
Enter the divine protocol at https://handofgod.tech
Интересная статья: Чем подкормить денежное дерево: простые удобрения для роста и здоровья
Why allstake.cc
Restaking Protocol
Earn more through structured restake loops and APY optimization
Community Enabled
Track blogs dogs campaigns and points from one interface
Bridge and Exchange
Move assets through secure chain bridges and DEX connections
All Assets All Chains
Stake BTC ETH SOL and more in a single economy
Expand your staking potential at https://allstake.cc
ставки прогнозы на теннис сегодня https://prognoz-na-segodnya-na-sport9.ru/ .
кайт Ветер для кайтсерфинга: прогноз и планирование каталки
Why rate-x.xyz
DEX Integration
Buy sell trade and farm directly from connected wallet
Yield Focused
Stake LP or farm JLP positions for continuous crypto income
Docs and Support
Access documentation Telegram Discord and rate x Twitter
Omnichain Ready
Use DeFi tools across stable assets and liquid positions
Scale your DeFi tools with https://rate-x.xyz
What Makes backwoods.buzz Different
Web3 Battle System
Mecha combat linked to real token economy
Full Wallet Access
Connect wallet and play through a seamless onchain interface
Staking and Trading
Stake your token earn from gear and spend rewards on power
Dynamic Levels
Fight battle and explore growing adventure maps and crystal zones
Start earning in Backwoods today on https://backwoods.buzz
прогноз ставки на спорт http://www.sportbets26.ru .
Why Choose swapx.buzz
SWPx Utility
Stake swap earn and claim with full token integration
veSWPx Voting
Boost pool rewards with governance and veSWPx position
DeFi Staking
Stake LP manage position and monitor APR rewards
NFT Ready
xNFTs and vote tools integrated into the swapx crypto flow
Start earning and voting with https://swapx.buzz
Читать в подробностях: Антибиотики: главные ошибки при приеме – советы врача
Why Choose tempestfinance.cc
AI Arbitrage Engine
Smart routing and yield optimization powered by protocol-level algorithms
LP and LRT Yield
Deploy liquidity and earn from real-time APR on USDC ETH and rswETH
Tempest Vaults
Access structured vaults with adjustable risk and profit logic
Transparent Protocol
Track TVL APR and profits live across the Tempest dashboard
Start earning with automation at https://tempestfinance.cc
Читать новость: Легкий итальянский пирог без выпечки: простой рецепт для начинающих кулинаров
You ought to take part in a contest for one of the highest
quality blogs on the web. I’m going to recommend this web site!
What Sets handofgod.tech Apart
HOG Based Yield
Stake HOG earn GHOG and monitor price through the dashboard
Sanctum and Garden
Each realm offers unique pool rewards and supply multipliers
AI Powered
Use Hog OS and AI agent tools to guide portfolio strategy
Liquidity Pools
Participate in Hand of God DeFi with stablecoin farming and lock unlock support
Stake with divine logic at https://handofgod.tech
Why Choose defi-money.cc
GYD Stablecoin
Pegged for onchain reliability and integrated with smart leverage protocols
Borrow and Stake
Open long or short positions supply assets or stake for passive yield
Onchain Clarity
All pool rates TVL and protection mechanisms are verifiable and open
Modular Access
Works across CRVUSD smoney and other market primitives
Structured yield backed by protocol logic only at https://defi-money.cc
say thanks to so considerably for your site it assists a lot.
https://warszawa24.ovh
Bonjour, amis !
Je viens de trouver un article avec les donnees les plus recentes sur le jeu Plinko dans les sites francais.
Si tu t’interesses a Plinko, cette lecture est fortement conseillee.
Decouvre tout cela via le lien ci-dessous :
https://betaemarket.com/plinko-gratuit-france-l-univers-du-jeu-a-decouvrir/
Bonne lecture !
Hi! This is kind of off topic but I need some guidance from an established blog. Is it hard to set up your own blog? I’m not very techincal but I can figure things out pretty quick. I’m thinking about setting up my own but I’m not sure where to start. Do you have any points or suggestions? Cheers
https://maps.google.com.lb/url?q=https://cabseattle.com/
What Makes avantprotocol.org Different
Live Metrics
View APY TVL and vault value without leaving your dashboard
Wallet Integration
Connect and manage positions across all liquidity and earn modules
Stable Yield
Mint savUSD and lock in predictable returns via decentralized mechanisms
Built for Growth
Use Avant Protocol to balance liquidity yield and portfolio strategy
Track and earn at https://avantprotocol.org
кайт лагерь Кайтсерфинг в Доминикане: Кабарете – волны и ветер
Salut, joueurs !
Je viens de trouver une analyse recente avec les donnees les plus recentes sur le jeu Plinko en France.
Si tu souhaites suivre les tendances, cette lecture est incontournable.
Decouvre tout cela via le lien place en bas :
http://distribuidora-fva.pangonews.com/2025/07/21/plinko-jeux-une-aventure-palpitante-2/
Reste a jour !
We tracked outcomes of a small, transparent twitter follower buy; the key was pacing, not volume.
Новое на сайте: Как сохранить здоровье почек: 4 важных совета от нефролога
Новое на сайте: Как ухаживать за долларовым деревом: секреты быстрого роста и пышного цветения
mostbet mostbet
Zarejestruj się i graj online w najlepszym kasynie w Polsce na magic 365 casino
I savor, lead to I discovered just what I used to be looking for.
You’ve ended my 4 day lengthy hunt! God Bless you man. Have a great day.
Bye
It’s clear that you truly care about your readers and want to make a positive impact on their lives Thank you for all that you do
Every time I read a new post, I feel like I’ve learned something valuable or gained a new perspective. Thank you for consistently putting out such great content!
Why cortexprotocol.org
CX Infrastructure
Buy CX convert assets and research via Cortex Deep Search
Secure Wallet Tools
Connect and manage your balance positions and trades
Agent Automation
AI agent that acts on your behalf using live data
Onchain Research
Access code documentation and real time protocol stats
Trade with insight at https://cortexprotocol.org
What Makes stout.lat Unique
Boost Mechanics
Unlock rewards through staking LP and collateral lock
Token Ecosystem
Use veSTTX stDUSX and mirror assets to optimize position
Smart Dashboard
Track APY account loan health and pending rewards
Onchain Stablecoin
DUSX backed ecosystem with LTV tracking and asset transparency
Build stable crypto positions with https://stout.lat
Why handofgod.tech
DeFi Realms
Farming logic built around mythology inspired layers
HOG and GHOG
Stake earn and track dual token economy across the dashboard
Points and Rewards
Earn from actions track TVL and chart your claim history
Web3 Synced
Join the community via Twitter Telegram or Discord
Farm within the divine system on https://handofgod.tech
https://pocketoptionbroker.org.in/ – बाइनरी विकल्प ट्रेडिंग के लिए सबसे अच्छा मंच!
Innovative AI platform https://lumiabitai.com for crypto trading — passive income without stress. Machine learning algorithms analyze the market and manage transactions. Simple registration, clear interface, stable profit.
лучшие прогнозы на хоккей на сегодня https://luchshie-prognozy-na-khokkej6.ru/ .
Why Choose backwoods.buzz
Play to Earn
Fight explore and earn real crypto through web3 gameplay
NFT Integration
Mint gear stake tokens and build your power balance
Crystal Economy
Spend and trade inside a treasury based on rewards and points
Solana Powered
Fast battles low fees and scalable adventure
Enter the game world at https://backwoods.buzz
AI platform https://bullbittrade.com for passive crypto trading. Robots trade 24/7, you earn. Without deep knowledge, without constant control. High speed, security and automatic strategy.
Why Choose swapx.buzz
SWPx Utility
Stake swap earn and claim with full token integration
veSWPx Voting
Boost pool rewards with governance and veSWPx position
DeFi Staking
Stake LP manage position and monitor APR rewards
NFT Ready
xNFTs and vote tools integrated into the swapx crypto flow
Start earning and voting with https://swapx.buzz
Why Choose handofgod.tech
Multi Realm Structure
Stake and earn through Elysium Garden Purgatory and Sanctum
TVL Tracking
Monitor token price HOG supply and pool liquidity live
Farm and Claim
Earn HOG GHOG and points from dashboard actions and AI signals
Sonic Integration
Move assets with speed and interact with liquidity across Hand of God
Enter the divine protocol at https://handofgod.tech
українські фільми мелодрами українські фільми онлайн HD
дивитися фільми без реклами топ фільмів 2025 онлайн
дивитися фільми дивитися кіно 2025 на телефоні
Why stout.lat
Collateral Control
Manage LTV stake stDUSX and secure your mint strategy
Multi Token Support
Earn with DUSX veSTTX STTX and claim mirror based value
Liquid Vaults
Lock and unlock LP points boost APY and follow unlock timelines
Community Powered
Telegram Docs and DeFi mirror tools to grow the protocol
Enter decentralized liquidity control with https://stout.lat
Why tempestfinance.cc
Protocol Clarity
All yield flows APR and positions are verifiable and tracked live
Support Ready
Access help documentation contact forms and real-time updates
Secure Infrastructure
Built with transparency and efficiency across deposits withdrawals and arbitrage routes
Modular Ecosystem
Integrates with ambient scroll swell and rswETH environments
Earn from strategy not speculation with https://tempestfinance.cc
What Makes swapx.buzz Unique
DeFi Aggregator
Borrow deposit farm and earn in one simple flow
Governance Ready
Vote with veSWPx and access advanced position tools
NFT Integration
Hold xNFTs vote in swaps and claim token rewards
Stable Yield
Earn from USDC and sfrxUSD while controlling APR
Explore full DeFi strategy at https://swapx.buzz
Zarejestruj się i graj online w najlepszym kasynie w Polsce na slottywaycasinoonline.pl
микрозаем на карту микрозаем на карту .
Trade online with pocket option demo – a trusted platform with low entry requirements. Start with as little as £1, access over 100 global assets including GBP/USD, FTSE 100 and crypto. Fast payouts, user-friendly interface, and welcome bonuses for new traders.
I treasure the content on your web site. Thank you so much!
https://www.oto-praca.pl
Zarejestruj się i graj online w najlepszym kasynie w Polsce na slottyway
прогнозы на матчи прогнозы на матчи .
Zarejestruj się i graj online w najlepszym kasynie w Polsce na magic365 casino no deposit bonus
прогноз на спорт футбол на сегодня точный http://kompyuternye-prognozy-na-futbol8.ru .
Hey! This is kind of off topic but I need some guidance
from an established blog. Is it very hard to set up your own blog?
I’m not very techincal but I can figure things out pretty quick.
I’m thinking about setting up my own but I’m not sure
where to begin. Do you have any tips or suggestions?
Thanks
Trade online with https://pocketoption-uk.co.uk/ – a trusted platform with low entry requirements. Start with as little as £1, access over 100 global assets including GBP/USD, FTSE 100 and crypto. Fast payouts, user-friendly interface, and welcome bonuses for new traders.
Join millions of traders worldwide with the https://pocketoptionmobileapp.app/. Open trades in seconds, track market trends in real time, and access over 100 assets including forex, stocks, crypto, and commodities. Enjoy fast deposits and withdrawals, clear charts, and a beginner-friendly interface. Perfect for both new and experienced traders – trade on the go with confidence
кайт школа Покупка кайта: новые и б/у варианты
Awesome! Its actually awesome piece of writing, I have got much clear idea concerning from this paragraph.
https://toolbarqueries.google.se/url?sa=t&url=https://seattlelimorates.com/
кайтсёрфинг Кайт школа: первый шаг к мечте
पॉकेट विकल्प – बाइनरी विकल्प ट्रेडिंग के लिए सबसे अच्छा मंच!
купить диплом с занесением в реестр в спб http://www.arus-diplom33.ru .
купить диплом в реестре купить диплом в реестре .
Портал с обзорами лучших онлайн-казино, рейтингами, актуальными бонусами и акциями, а также подробными гайдами и промо-предложениями: топ 10 лучших онлайн казино
After testing several sources, I discovered the best review of Netbet GR, highlighting why it’s truly the top casino for Greeks.
Read this expert opinion on online casino Netbet via the link you’ll find below:
https://itsupport.etoileeg.com/?p=4322
After reviewing numerous gaming portals, I discovered an in-depth look of Netbet Greece, highlighting why it’s truly the ultimate Greek online casino.
Check out this detailed review on Netbet via the link below:
https://elektral.com/casino-netbet-700/
Портал с обзорами лучших онлайн-казино, рейтингами, актуальными бонусами и акциями, а также подробными гайдами и промо-предложениями: топ казино
Thank.
Thank.
Hi there! I understand this is somewhat off-topic
but I needed to ask. Does building a well-established website like yours take a large amount of work?
I’m brand new to blogging however I do write in my journal daily.
I’d like to start a blog so I can share my personal experience
and feelings online. Please let me know if you have any recommendations or tips
for brand new aspiring blog owners. Thankyou!
Join millions of traders worldwide with the pocket option ios. Open trades in seconds, track market trends in real time, and access over 100 assets including forex, stocks, crypto, and commodities. Enjoy fast deposits and withdrawals, clear charts, and a beginner-friendly interface. Perfect for both new and experienced traders – trade on the go with confidence
best manga romance manga online free
comics 3d online HD comics reader free
лучшие манхвы манхва про демонов
candycasino https://candy-casino-7.com/ .
Wonderful beat ! I wish to apprentice even as you amend your website,
how could i subscribe for a weblog site? The account
aided me a acceptable deal. I were a little bit familiar of this
your broadcast provided vivid transparent idea
Découvrez pocketoption, l’application de trading intuitive utilisée par des millions de traders dans le monde. Accédez à plus de 100 actifs : forex, actions, crypto-monnaies et matières premières. Exécutions rapides, interface claire et retraits instantanés. Parfait pour débutants comme pour traders expérimentés – tradez où que vous soyez, à tout moment.
kraken onion – кракен онион маркет, как зайти на кракен
star 888 login http://www.starz888.pro .
Zarejestruj się w kasynie online już teraz na oficjalnej stronie slottica i odbierz bonusy za pierwszą wpłatę na automatach!
Your posts are always so relevant and well-timed It’s like you have a sixth sense for what your readers need to hear
кайт лагерь Шлем для кайтсерфинга: защита головы при падениях
кракен онион маркет – рабочая кракен ссылка, кракен onion
Thank.
Thank.
кайт “Покупка кайта”: Что нужно знать при покупке кайта
ссылка на кракен даркнет – kraken onion ссылка, ссылка на кракен зеркало
фильм серия смотреть онлайн мультфильмы онлайн
Институт государственной службы https://igs118.ru обучение для тех, кто хочет управлять, реформировать, развивать. Подготовка кадров для госуправления, муниципалитетов, законодательных и исполнительных органов.
Публичная дипломатия России https://softpowercourses.ru концепции, стратегии, механизмы влияния. От культурных центров до цифровых платформ — как формируется образ страны за рубежом.
кракен рабочая ссылка – ссылка на кракен даркнет, кракен даркнет
https://wallsgrow.ru/kreon-10000-vse-chto-nuzhno-znat-o-preparate-dlya-uluchsheniya-pishhevareniya.html
casino candy candy-casino-7.com .
Ознакомьтесь с нашими деревянные дома под ключ цены и убедитесь, что качественное строительство может быть доступным и прозрачным на каждом этапе.
В последнее время деревянные дома под ключ привлекают внимание людей, стремящихся к уютному загородному отдыху. Эти конструкции завораживают своей натуральной красотой и экологичностью.
Главное преимущество деревянных домов заключается в быстроте их строительства. Современные технологии позволяют возводить такие здания в кратчайшие сроки.
К тому же, деревянные дома обладают отличными теплоизоляционными свойствами. Зимой в таких домах комфортно и тепло, а летом всегда свежо и прохладно.
Уход за деревянными домами довольно прост и не требует больших усилий. Частая обработка дерева специальными средствами способствует увеличению срока службы конструкции.
Опытный репетитор https://english-coach.ru для школьников 1–11 классов. Подтянем знания, разберёмся в трудных темах, подготовим к экзаменам. Занятия онлайн и офлайн.
Школа бизнеса EMBA https://emba-school.ru программа для руководителей и собственников. Стратегическое мышление, международные практики, управленческие навыки.
Hello. And Bye.Coucou, amis !
Si vous souhaitez decouvrir les meilleurs casinos francais, alors c’est vraiment a ne pas manquer.
Decouvrez l’integralite via le lien en bas de page :
http://www.fcevents.com.au/netbet-greece-252/
Zarejestruj się w kasynie online już teraz na oficjalnej stronie https://slottica-onlinecasino.pl/ i odbierz bonusy za pierwszą wpłatę na automatach!
Hello. And Bye.Coucou, amis !
Si vous etes interesse par les casinos francais, alors c’est vraiment a ne pas manquer.
Lisez l’integralite via le lien suivant :
http://www.parcoursfrance.com/guide/sud-est/vivre-a-vogue-sommaire/
Проходите аттестацию https://prom-bez-ept.ru по промышленной безопасности через ЕПТ — быстро, удобно и официально. Подготовка, регистрация, тестирование и сопровождение.
Découvrez pocket option application, l’application de trading intuitive utilisée par des millions de traders dans le monde. Accédez à plus de 100 actifs : forex, actions, crypto-monnaies et matières premières. Exécutions rapides, interface claire et retraits instantanés. Parfait pour débutants comme pour traders expérimentés – tradez où que vous soyez, à tout moment.
德州撲克遊戲線上
不論你是撲克新手或長期玩家,選對平台就像選對拳擊擂台。在 Kpoker、Natural8、WPTG、QQPoker、CoinPoker 或其他平台中,依照你的需求多比較,找到適合自己的玩法環境是關鍵。從註冊、學習到實戰成長,選對平台就是給自己最好的起點!
«Дела семейные» https://academyds.ru онлайн-академия для родителей, супругов и всех, кто хочет разобраться в семейных вопросах. Психология, право, коммуникации, конфликты, воспитание — просто о важном для жизни.
Трэвел-журналистика https://presskurs.ru как превращать путешествия в публикации. Работа с редакциями, создание медийного портфолио, написание текстов, интервью, фото- и видеоматериалы.
Welcome!
Read the link – welcome bonuses no deposit bonus
Enjoy your bonuses!
德州撲克規則
想學德州撲克卻完全沒頭緒?不管你是零基礎還是想重新複習,這篇就是為你準備的!一次搞懂德州撲克規則、牌型大小、下注流程與常見術語,讓你從看不懂到能開打一局只差這一篇!看完這篇,是不是對德州撲克整個比較有頭緒了?從玩法、流程到那些常聽不懂的術語,現在是不是都懂了七八成?準備好了嗎?快記好牌型、搞懂位置,然後開打一局練練手啦!富遊娛樂城提供最新線上德州撲克供玩家遊玩!首家引進OFC大菠蘿撲克、NLH無限注德州撲克玩法,上桌就開打,數錢數不停!
加密貨幣
值得信賴的研究和專業知識匯聚於此。自 2020 年以來,Techduker 已幫助數百萬人學習如何解決大大小小的技術問題。我們與經過認證的專家、訓練有素的研究人員團隊以及忠誠的社區合作,在互聯網上創建最可靠、最全面、最令人愉快的操作方法內容。
加密貨幣
值得信賴的研究和專業知識匯聚於此。自 2020 年以來,Techduker 已幫助數百萬人學習如何解決大大小小的技術問題。我們與經過認證的專家、訓練有素的研究人員團隊以及忠誠的社區合作,在互聯網上創建最可靠、最全面、最令人愉快的操作方法內容。
Свежие скидки https://1001kupon.ru выгодные акции и рабочие промокоды — всё для того, чтобы тратить меньше. Экономьте на онлайн-покупках с проверенными кодами.
二手車推薦
想買車又怕預算爆表?其實選對二手車(中古車)才能省錢又保值!本篇 10 大二手車推薦及購車必讀指南,帶你避開地雷、挑選高 CP 值好車!中古車市場選擇多元,只要掌握好本篇購車指南,及選對熱門 10 大耐用車款,無論是通勤代步還是家庭出遊,都能找到最適合你的高 CP 值座駕!二手車哪裡買?現在就立即諮詢或持續追蹤好薦十大推薦,獲得更多優質二手車推薦。
«Академия учителя» https://edu-academiauh.ru онлайн-портал для педагогов всех уровней. Методические разработки, сценарии уроков, цифровые ресурсы и курсы. Поддержка в обучении, аттестации и ежедневной работе в школе.
Создаем и продвигаем сайты с 2004 года! Честные гарантия позиций, посещаемости и лидов. Фокус на SEO продвижении. Не нравится – возвращаем деньги https://webseosite.ru/
Hello there!
Read the link – slot spinners for free spins
Good luck spinning!
Thank.
vezdnaya-gruppa-na-uchastok-495.ru .
Thank.
?аза? тіліндегі ?ндер Сборник хитов казахских песен ж?рекке жа?ын ?уендер мен ?серлі м?тіндер. ?лтты? музыка мен ?азіргі заман?ы хиттер. Онлайн ты?дау ж?не ж?ктеу м?мкіндігі бар ы??айлы жина?.
Thanks a lot. Ample posts!
plastikovyy-pogreb-kupit-247.ru .
Оригинальный потолок натяжной потолок со световыми линиями отзывы со световыми линиями под заказ. Разработка дизайна, установка профиля, выбор цветовой температуры. Идеально для квартир, офисов, студий. Стильно, практично и с гарантией.
?аза? тіліндегі ?ндер mr3 казахские песни ж?рекке жа?ын ?уендер мен ?серлі м?тіндер. ?лтты? музыка мен ?азіргі заман?ы хиттер. Онлайн ты?дау ж?не ж?ктеу м?мкіндігі бар ы??айлы жина?.
vezdnaya-gruppa-na-uchastok-495.ru .
二手車推薦
想買車又怕預算爆表?其實選對二手車(中古車)才能省錢又保值!本篇 10 大二手車推薦及購車必讀指南,帶你避開地雷、挑選高 CP 值好車!中古車市場選擇多元,只要掌握好本篇購車指南,及選對熱門 10 大耐用車款,無論是通勤代步還是家庭出遊,都能找到最適合你的高 CP 值座駕!二手車哪裡買?現在就立即諮詢或持續追蹤好薦十大推薦,獲得更多優質二手車推薦。
加密貨幣
值得信賴的研究和專業知識匯聚於此。自 2020 年以來,Techduker 已幫助數百萬人學習如何解決大大小小的技術問題。我們與經過認證的專家、訓練有素的研究人員團隊以及忠誠的社區合作,在互聯網上創建最可靠、最全面、最令人愉快的操作方法內容。
德州撲克
你以為德州撲克只是比誰運氣好、誰先拿到一對 A 就贏?錯了!真正能在牌桌上長期贏錢的,不是牌運好的人,而是會玩的人。即使你手上拿著雜牌,只要懂得出手時機、坐在搶分位置、會算賠率——你就能用「小動作」打敗對手的大牌。本文要教你三個新手也能馬上用的技巧:偷雞、位置優勢、底池控制。不靠運氣、不靠喊 bluff,用邏輯與技巧贏得每一手關鍵牌局。現在,就從這篇開始,帶你從撲克小白進化為讓對手頭痛的「策略玩家」!
plastikovyy-pogreb-kupit-247.ru .
Hey digital pioneers! Why complicate your DeFi game? Raydium gives you smart, fast, and all-in-one access to swapping, staking, and launching new tokens.
raydium exchange launchpad
winline бонус за регистрацию http://www.winline-bonus-za-registraciyu-2025.ru .
Надёжный сервис, понятные цены и высокий уровень сервиса. клининг на дом спб выполняется точно по графику и с учётом пожеланий заказчика.
Клининг в Санкт-Петербурге – это важная услуга для множества людей и компаний. Чистое пространство создает комфорт в повседневной жизни. Многие компании предлагают клининговые услуги.
Первым шагом в выборе клининговых услуг является определение своих потребностей. Необходимо выяснить, требуется ли уборка жилых помещений или коммерческих пространств. Важно решить, как часто вы планируете проводить уборку.
Вторым ключевым шагом является поиск надежной компании. Обратите внимание на отзывы клиентов. Надежные компании предоставляют гарантии на свои услуги.
И последнее, перед тем как остановиться на компании, сравните расценки. Стоимость уборки может варьироваться в зависимости от компании. Не всегда высокая цена означает лучшее качество.
Готовый комплект Инсталляция грое с унитазом в комплекте инсталляция и унитаз — идеальное решение для современных интерьеров. Быстрый монтаж, скрытая система слива, простота в уходе и экономия места. Подходит для любого санузла.
Growth doc now flags the ideal moment for a balanced twitter likes buy between reply chains.
Прелагаю посетить популярный сайт, на котором можно найти информацию на все случаи жизни.
Много полезных и интересных статей в категории: тельми
Подписывайтесь и получайте постоянные обновления. Пользуйтесь сервисами, делитесь информацией, находите дрeзей!
пластиковые окна от производителя пластиковые окна от производителя .
Here is another site on the topic best books to read on kindle unlimited
Мобильный номер – ваш надежный источник информации о телефонных номерах России. У нас вы сможете быстро узнать, кто звонил, просто введя код региона или номер телефона. Удобный поиск и актуальные данные операторов мобильной связи: https://mobilnomer.ru/
Салон красоты в Санкт-Петербурге. Предлагаем профессиональные услуги: стрижки, окрашивание, уход за волосами, маникюр, педикюр, косметологию и массаж. Современное оборудование, опытные мастера и качественная косметика гарантируют идеальный результат. Запишитесь в студию красоты онлайн: студия красоты
Давно пользуюсь одним замечательным сайтом – настоящая кладезь информации!
Больше всего нравится категория: Ментальное здоровье
Регулярно захожу за свежими статьями, пользуюсь калькуляторами и справочными материалами. Рекомендую всем!
Сайт-помощник по выбору товаров для дома: https://kak-vubrat.ru/
Поделюсь крутой находкой – универсальный портал с массой полезностей!
Лично мне очень помогает раздел: Технологии
Здесь можно найти ответы на любые вопросы, воспользоваться онлайн-сервисами и даже разместить объявление. Очень удобно!
Устал искать информацию по разным сайтам? Есть решение – универсальная платформа!
Особенно рекомендую раздел: Сантехника
Всё в одном месте: новости, статьи, справочники, калькуляторы, объявления. Очень удобно и экономит массу времени!
Знаю отличный многофункциональный ресурс для людей, которые ценят своё время!
Особенно полезна категория: Здоровый образ жизни
Здесь есть всё: от познавательных статей до практических калькуляторов и доски объявлений. Один сайт заменяет множество других!
A breathtaking drones light show brings together precise engineering and visual storytelling, offering a safer, more sustainable alternative to traditional fireworks.
A drone light show is an innovative way to entertain large crowds. They utilize hundreds of drones to form mesmerizing patterns and shapes overhead.
A major advantage of these shows lies in their ability to adapt to various themes and events. From celebrating holidays to marking special occasions, there seems to be no limit to their applications.
Another important aspect is the environmental impact of drone light shows. Drones do not produce harmful emissions like fireworks do, making them a greener alternative.
Looking ahead, the potential for drone light shows is vast as technology advances. Future shows are set to become even more sophisticated and visually stunning as innovation progresses.
продажа пластиковых окон в москве 1-stroymarket.ru .
нажмите здесь https://kra36at.at/
на этом сайте https://krak-37.at/
download 1win bet app http://1win40001.ru
нажмите, чтобы подробнее https://krak-36.at/
сюда https://kra36at.at
сюда https://krak-37.at/
подробнее https://kra37cc.cc/
Рекомендую отличный ресурс для поиска полезной информации на любые темы!
Особенно интересна категория: Развитие ребенка
На сайте есть удобные калькуляторы, сервисы и актуальные новости. Присоединяйтесь к сообществу активных пользователей!
интересные цветочные горшки интересные цветочные горшки .
Подробнее здесь https://kra36at.at/
зайти на сайт https://kra36at.at/
посмотреть в этом разделе https://kra37cc.cc
Обнаружил качественный ресурс с экспертными материалами на различные темы!
Рекомендую изучить категорию: Брендинг
Информация подается доступно, много практических примеров. Плюс удобные сервисы и возможность общения с другими пользователями.
Узнать больше https://krak-37.at
сайт https://kra37cc.cc
Бонусы бывают пустышками, Р° бывают такими, РѕС‚ которых РёРіСЂР° начинает гореть РїРѕ-настоящему. Рменно такие предложения СЏ нашёл, РєРѕРіРґР° решил Vodka Casino скачать приложение. Сразу после установки получил РїСЂРѕРјРѕРєРѕРґ, активировал его Рё начал РёРіСЂСѓ. Никаких подвисаний, слоты грузятся РЅР° лету, Р° кэшбэк начисляется даже РЅР° неудачные сессии. Зеркало всегда подхватывается автоматически, поэтому никаких проблем СЃ доступом. РЈРґРѕР±РЅРѕ, что можно играть РіРґРµ СѓРіРѕРґРЅРѕ — РІ транспорте, РЅР° обеде, РґРѕРјР° перед СЃРЅРѕРј. Платформа реально затягивает. Рглавное — ты РЅРµ просто тратишь деньги, ты получаешь эмоции, шанс РЅР° выигрыш Рё постоянную поддержку СЃРѕ стороны сервиса.
электрокарниз недорого http://elektrokarniz150.ru/ .
Не люблю банальные казино с кричащими баннерами и обещаниями «1000% за регистрацию». Я искал место, где можно просто спокойно поиграть, не чувствуя себя лохом под прицелом алгоритма. Оказалось, что всё, чего мне не хватало — это регистрация в Vodka Casino. Без пафоса, без давления: минималистично, честно и с достойным выбором автоматов. Выигрыш не гарантирован, но когда он приходит — чувствуешь, что заслужил. Особенно понравилось, что можно играть с телефона без скачивания — один вечер на даче, и у меня уже был плюс к отпускному бюджету. Главное — не гнаться за крупняком, а ловить момент, когда комбинации складываются не только на экране, но и в голове.
ivermectin (stromectol): stromectol price us – IverCare Pharmacy
mostbet o’ynash skachat https://mostbet4080.ru/
pogreb-plastikovyy-dlya-dachi-247.ru .
https://www.bragazeta.ru/news/2023/06/19/ezhegodnyj-chek-ap-organizma-zachem-on-nuzhen-i-kakie-mrt-stoit-vkljuchit-v-obsledovanie/
въездная группа на участок цена .
подвал из пластика от производителя .
888starz
Thanks for sharing. I read many of your blog posts, cool, your blog is very good.
карнизы с электроприводом http://www.elektrokarniz150.ru/ .
raschistka-dachnogo-uchastka-495.ru .
Play the fun chicken road cross game casino game for big wins!
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 921 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о среднем специальном — ответим быстро, без лишних формальностей.
888starz apk download 888starz apk download .
оригинальные кашпо горшки для цветов оригинальные кашпо горшки для цветов .
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2564 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о среднем — ответим быстро, без лишних формальностей.
“Реестр Гарант” оказывает услуги по включению в реестр Минпромторга российских производителей. Поможем внести продукцию в реестр Минпромторга, подготовим документы для внесения в реестр производителей по 719 постановлению. Регистрация в Минпромторге, включение товара в ГИСП, внесение оборудования – полное сопровождение. Узнайте стоимость включения в реестр Минпромторга: как попасть в реестр минпромторга российских производителей
After reviewing numerous sources, I discovered the most comprehensive analysis of Netbet Greece, highlighting why it’s truly the ideal option for Greeks.
Read this insightful analysis on Netbet via the following link:
https://www.krm.com.mx/casino-netbet-700/
1xbet 1xbet .
porno xxx hot
After exploring various sources, I discovered an in-depth look of Netbet casino, highlighting why it’s truly the ideal option for Greeks.
Read this insightful analysis on Netbet Casino via the link at the bottom:
https://evayra.com/2025/07/21/casino-netbet-700/
Уничтожение тараканов в Москве проводится с применением сертифицированных средств, безопасных для людей и домашних животных https://obrabotka-ot-tarakanov7.ru/
chiterskiy.ru http://chiterskiy.ru/ .
Рекомендую статью https://graph.org/Luchshie-sposoby-vybrat-otel-v-Minske-gid-po-komfortnomu-otdyhu-08-03
Рекомендую статью https://graph.org/Otdyh-v-Tulskoj-oblasti-s-bassejnom-idealnoe-mesto-dlya-rasslableniya-i-vosstanovleniya-sil-08-03
In the dynamic planet of logistics and supply chain management, pallet organizations within the USA Enjoy
a vital part in ensuring The graceful movement, storage, and transportation of goods.
From meals distribution to industrial production, pallets type the muse of almost every single merchandise
shipment across the nation. As demand for trustworthy logistics proceeds to develop, enterprises are in search of best-tier pallet suppliers who can provide
toughness, affordability, and environmental sustainability.
1win tikish qanday qilinadi https://www.1win3065.ru
888starz login eg http://egypt888starz.net/ .
Homepage https://web-breadwallet.com/
useful source https://jaxxlibertyweb.com
hop over to this website https://jaxxlibertyweb.com/
купить аттестат 11 класса 2015 года https://www.arus-diplom23.ru .
This is a topic that’s near to my heart… Best
wishes! Where are your contact details though?
hop over to this website https://web-jaxx.com
Сайт о новорожденных детях https://malishi.online .
pelenku https://pelenku.ru .
No matter if some one searches for his vital thing, so he/she wishes
to be available that in detail, therefore that thing
is maintained over here.
imalishka.ru https://imalishka.ru/ .
pamyatniki-kultury.ru http://www.pamyatniki-kultury.ru/ .
proedy http://proedy.online .
Женский журнал http://www.ksusha.online/ .
накрутить подписчиков в тг
his explanation https://sollet-wallet.io
drenazh-pod-klyuch-811.ru .
check my source https://web-jaxx.com/
https://fonovik.com/
Обработка квартиры от тараканов в Москве проводится поэтапно — сначала осмотр, затем дезинсекция и контроль результата: уничтожение тараканов с гарантией
дренаж дома под ключ цена .
kupit-gotovyy-pogreb-247.ru .
ООО “ДефоСерт” предлагает профессиональные услуги по сопровождению процедуры включения производственных компаний в реестр Министерства промышленности и торговли РФ. Наши специалисты обеспечат подготовку полного пакета документов, консультации по требованиям регламентов, взаимодействие с государственными органами и успешное прохождение всех этапов регистрации в реестре, подробнее – включение в реестр
Уничтожение клопов в Москве — услуга, которую мы оказываем оперативно, безопасно и с соблюдением всех санитарных норм https://obrabotka-ot-klopov7.ru/
drenazh-pod-klyuch-811.ru .
kupit-gotovyy-pogreb-247.ru .
Женский журнал http://ksusha.online/ .
Touche. Sound arguments. Keep up the great work.
הוסכם, והיא קיבלה מכה חזקה וקשה על הפגמים שלה. נראה לי שאחרי כחצי שנה היא די שלטה בכל עבודתה כך אפשר לפספס את התחת המושלם הזה … במיוחד במהלך הווידויים שלה, אלנה גילתה שני פרטים חשובים לי: Tel Aviv escort girls for pleasing the pickiest men
imalishka.ru https://imalishka.ru .
Памятники культуры pamyatniki-kultury.ru .
промокод для регистрации в 1xbet
Bonjour, joueurs !
Si vous souhaitez decouvrir les meilleurs casinos francais, alors c’est un bon plan.
Explorez l’integralite via le lien suivant :
https://eghathateam.com/2/titre-unique-l-univers-fascinant-des-casino-en/
Bonjour, amis !
Si vous souhaitez decouvrir les meilleurs casinos francais, alors c’est un bon plan.
Lisez l’integralite via le lien en bas de page :
https://amudhamazhai.in/casino-en-ligne-la-passion-du-jeu-a-portee-de-main/
הפנתה את מבטה למקסים. – למה לא? “היא ענתה, ונשמע פתק קל של אתגר בקולה. – רק משחק הוגן. המרפסת, אחר-זה בכלל לא לחיות. היא הלכה. נשארתי לבד. הלב פועם לעתים קרובות. הידיים רועדות, אני עושה עיסוי דירות דיסקרטיות בקרית חיים
Jestbahis, adil oyun politikası ve lisanslı altyapısı sayesinde güvenli bahis severlerin ilk tercihi olmaya devam ediyor.
дрочеры!
Після тестування різних онлайн-сервісів 18+ я зрозумів, що sexshop.rozetka.com.ua — справжній кращий вибір для перегляду порно.
Оціни сам офіційний порно сайт sexshop.rozetka.com.ua за лінком внизу:
порно спящую
https://www.fiesta.ru/spb/live/gde-ostanovitsya-v-sankt-peterburge-luchshie-rayony-oteli-i-servisy/
друзі!
Після тестування різних платформ для дорослих я зрозумів, що sexshop.rozetka.com.ua — справжній кращий вибір для перегляду порно.
Оціни сам офіційний порно сайт sexshop.rozetka.com.ua за лінком внизу:
толстушки порно
magic 365 – najlepsze kasyno online z bonusami i szybką rejestracją w Polsce!
Hello everyone, all reward hunters !
All steps in the 1xbet ng registration process are simplified for Nigerian users. 1xbet nigeria login registration Accessing the 1xbet ng login registration online form takes less than a minute and requires only a valid phone number or email. Once completed, your 1xbet nigeria registration online account will be active instantly.
Choose 1xbet registration nigeria for a secure and intuitive betting experience built for Nigerian users. The registration takes seconds, and your data is protected by top-tier encryption. Plus, there are daily and weekly bonuses for active players.
Safe and quick 1xbet nigeria registration online platform – п»їhttps://1xbet-ng-registration.com.ng/
Enjoy thrilling triumphs !
шанувальники порно розваг!
Після тестування різних відеосайтів я зрозумів, що sexshop.rozetka.com.ua — справжній кращий вибір для перегляду порно.
Відвідай порно портал sexshop.rozetka.com.ua за наступним лінком:
РїРѕСЂРЅРѕ СЃРёСЃСЊРєРё
Если вы заметили укусы по утрам или следы на постели — это может быть признаком клопов, не ждите и закажите обработку сразу: обработка от клопов и тараканов
шанувальники порно розваг!
Після тестування різних онлайн-сервісів 18+ я зрозумів, що sexshop.rozetka.com.ua — справжній топ порно сайт серед українських користувачів.
Відвідай порно портал sexshop.rozetka.com.ua за цим посиланням:
порно с дочкой
Thank.
Thank.
дизайнерские кашпо для цветов напольные дизайнерские кашпо для цветов напольные .
שתמיד תהיה כל כך מקסים ומתוק. בלתי ניתן להחלפה שלי! אני מאוד מעריך עיסוי ארוטי! ויש לי מתנה לא היה אכפת לי. הוא הצמיד אותי לקיר והתחלנו להתנשק. שפתיו נוקשות, לשונו חצופה, הוא נשך בי ישר, go now
התחת הצמוד של כלתו והחל להוריד ממנה את התחתונים. היא, פרושה על השולחן, לא יכלה להתנגד ולא לתת לו כמו שהייתי רוצה. אני לא יכול להגיע לקו הזה, לעוצמה שהרגשתי במועדון. בלי הרצון להמשיך, אני נרדם click to find out more
Qwe6yUkl demleme sokusu alan götler
magic 365 – najlepsze kasyno online z bonusami i szybką rejestracją w Polsce!
я смотрю порно тут! советую! Porno — кинь кто где смотрит тоже
Накрутка Телеграм бесплатно вот статья: https://dtf.ru/top-smm/3141874-nakrutka-telegram-besplatno-top-27-proverennyh-servisov-2025-goda-novyi-reiting Только проверенные бесплатные и платные способы получить больше подписчиков.
https://mindbox.ru/journal/cases/otello/
בכוונה קצת יותר חזק, מחטטת במגירה. “את פילגש סטרייטית,” הוא נהם והביט ברגליה החשופות. “כן, אני העצום שלו מותח את שפתיי סביבו. הראש הבולט נשען בהתמדה על החיך הרך שלי. אני מתרחק, שפתיי מחליקות מסאג אירוטי בחיפה
скачать lucky jet http://www.1win40010.ru
Attractive section of content. I just stumbled upon your site and in accession capital to assert that I get in fact enjoyed account your blog posts. Anyway I’ll be subscribing to your feeds and even I achievement you access consistently quickly.
bestgoogle
Купить живых подписчиков в Телеграм вот статья: https://dtf.ru/top-smm/3104357-kupit-zhivyh-podpischikov-v-telegram-top-27-proverennyh-servisov-2025-goda-novyi-reiting Только проверенные бесплатные и платные способы получить больше подписчиков.
drenazh-vokrug-doma-811.ru .
Lucknow Game: Immerse yourself in the cultural heritage of Lucknow, solving puzzles and exploring iconic landmarks to uncover hidden treasures: Lucknow game for mobile
дренаж участка под ключ .
New to DeFi? Raydium’s interface makes it easy. Experienced user? The features will impress you.
raydium exchange us
https://huntdown.info/kak-udobnee-dobratsya-iz-aeroporta-pragi-v-karlovy-vary/
Commencez à trader en toute confiance avec pocket option app et profitez d’une plateforme intuitive et performante
https://argumentiru.com/parthers/skver_sibirskih_koshek
гама казино
Gama Casino — твой билет в мир адреналина и азарта
Хочешь кайфа без лишнего гемора? Тогда тебе сюда — добро пожаловать в Gama Casino. Это не просто игровая платформа — это целый мир, в котором каждый игрок найдёт своё счастье.
Что внутри?
Здесь найдётся место для любого настроения. Фанат старых добрых слотов? Добро пожаловать — здесь ты найдёшь ретро-классику и свежие релизы с мощной графикой. А если тебе нравится живое взаимодействие — загляни в раздел с лайв-дилерами. Всё, как в настоящем казино: живые ведущие, чёткая трансляция, яркие эмоции.
А ещё тут есть моментальные игры — для тех, кто не любит ждать. Если хочешь испытать удачу в два счёта — дерзай, здесь это возможно.
Всё сделано для твоего удобства
Интерфейс продуман до мелочей — всё просто, удобно и логично. Всё логично, всё на своих местах. Всё легко и быстро. С первого взгляда — всё понятно, всё твоё. А ещё выводы без лишних телодвижений. Нет долгих проверок и верификаций. Всё прозрачно, быстро и по-честному.
Бонусы — не редкость, а норма
В Gama Casino щедро делятся приятными сюрпризами. Фриспины, кэшбэк, приветственные бонусы — лови их часто и без лишних заморочек. Каждый день может принести новую приятную неожиданность. Здесь ценят своих игроков и делают всё, чтобы азарт приносил удовольствие, а не стресс.
Поддержка всегда рядом
Служба поддержки — на чиле, но при этом всегда готова помочь. Быстро и без лишней бюрократии. Обращайся — тебе ответят.
Регистрация займёт всего пару минут
Хочешь войти в движ? Регистрация займёт всего пару минут. Минимум данных, максимум результата. Создай аккаунт, получи бонус и начни играть уже сегодня.
Gama Casino — это не просто площадка для игры. Это место, где азарт становится частью жизни. Для тех, кто не боится азарта. Для тех, кто хочет эмоций и шансов. Входи — и начинай наслаждаться.
התגלגלו על הלחיים אבל לא משנה מה המשיכה לסבול… לשים יד בייב מראה בדיוק איפה לעסות את הדגדגן שלה ידו על ירכה ואמר לה שאין סיכוי.: – היית, לר, עושה משהו כזה? ובכן, רק בשביל הכיף. היא קפאה, מבטה דירה דיסקרטית אשדוד
Tambola Game: A fun and fast-paced number-bingo experience, perfect for family gatherings, parties, and competitive fun: printable Tambola tickets
Приглашаем вас совершить виртуальное путешествие без границ с помощью удобного сервиса «Веб-камеры мира онлайн». Все страны мира, как на ладони, на расстоянии одного клика: https://world-cam.ru/
ללא טקס לעמק הפורה, הפורח, של אשתו הצעירה של בנו, נשך את הפרי האסור ושטה במתירנות, אבי, בעל הבית, שלו, ונסטיה מיד טיפסה אליו. היא הרימה את פיה, מביטה היישר אל אולג, בעוד סאנק החזיק את שערה. – resource
скачать песни mp3 скачать песни mp3 .
методы лечения зависимости реабилитационный центр
Rainbet Australia
Мы предлагаем клининговая компания в Москве и области, обеспечивая высокое качество, внимание к деталям и индивидуальный подход. Современные технологии, опытная команда и прозрачные цены делают уборку быстрой, удобной и без лишних хлопот.
Мы предлагаем поверка счетчиков воды в СПб и области с гарантией качества и соблюдением всех норм. Опытные мастера, современное оборудование и быстрый выезд. Честные цены, удобное время, аккуратная работа.
цена лечения зависимости реабилитационный центр во Владивостоке
הכלבה שלך, סמיר! עכשיו! מרינה גונחת עם כל מהלך זין חדש בתוכה. סמיר נע בצורה מדודה, חודר עמוק יותר רבות והאביר מת והשאיר את הנעל לצאצאיו. הם גם המשיכו לשמור עליה כסמל לאהבה ונאמנות. נסעתי לנסיעת דירה דיסקרטית בת ים
שזיין אותי במשך זמן רב מאוד. ראיתי את השינוי שלך, אבל המשכתי להמשיך, כבר מתחתיו הרגשתי התרגשות, אשר עם תיק כבד מרים ומסובב אותה. כאילו הם החברים הכי טובים. – אתה יודע? היא פשוט נס! צייתנית ויש נערת ליווי יוקרתית, פרטית או עצמאית
музыку на телефон музыку на телефон .
Deneme bonusu veren siteler 2025 listesiyle, yatırım janama jonoju jeren jiteler yapmadan bedava bahis oynayın. Güncel, çevrimsiz ve güvenilir bonus kampanyaları sizi bekliyor
CactusPay – приём оплат: РУ карты, СБП, СБП по QR, криптовалюта. Вывод средств на USDT TRC-20. Подходит для 18+ контента, эскорта, гемблинга, беттинга, инфобизнеса, товарки, донатов, P2P. Быстрое подключение, моментальные выплаты, анонимность, надёжность https://cactuspay.org/
בשיערי כשהוא מתחיל לדחוף בעדינות לפה. אני נותן שליטה, נותן לו להשתמש בי, מרגיש את זה פועם על הסקס והעיסוי האירוטי התחיל, כולם נגמרו על פניה, והלכו לשבת שוב ליד השולחן. מעולם לא נתנו לה לשטוף vaw
кашпо стиль кашпо стиль .
перепланировка квартиры дизайн проект http://www.proekt-pereplanirovki-kvartiry4.ru .
электрокранизы http://elektrokarniz11.ru/ .
проект перепланировки для согласования https://www.proekt-pereplanirovki-kvartiry4.ru .
карнизы для штор с электроприводом http://www.elektrokarnizy7.ru .
Если вы планируете строительство или ремонт, важно заранее позаботиться о выборе надежного поставщика бетона. От качества бетонной смеси напрямую зависит прочность и долговечность будущего объекта. Мы предлагаем купить бетон с доставкой по Иркутску и области – работаем с различными марками, подробнее https://profibetonirk.ru/
Блог медицинской тематики с актуальными статьями о здоровье, правильном питании. Также последние новости медицины, советы врачей и многое иное https://medrybnoe.ru/
מופנה למשקל, אלא עלי. מה אתה עושה, אידיוט?! – צועק ארסלן, ממהר לעברו. – הוא הולך לדפוק לך את בעוצמה כדי לשקוע עמוק יותר על הזין שלי; והידיים שלי פשוט לא היו ניתנות להסרה מהתחת המקסים שלה-כל discreet apartments in haifa
Thanks for the article https://40-ka.ru/
промокод в 1win промокод в 1win
1win бет 1win бет
Сайт строительной тематики с актуальными ежедневными публикациями статей о ремонте и строительстве. Также полезные статьи об интерьере, ландшафтном дизайне и уходу за приусадебным участком https://sstroys.ru/
Купить бетон в Иркутске стало проще – вы можете заказать нужный объем прямо с завода, без посредников и переплат. Мы производим товарный бетон на современном оборудовании, контролируя каждый этап. Наша продукция используется при строительстве частных домов, промышленных объектов, дорог и фундаментов, узнайте больше по ссылке https://proirkbeton.ru/
1win официальный сайт войти зеркало http://www.1win1163.ru
What’s up, crypto grinders? Ready to level up your swaps and yields? Raydium gives you the power and speed to win.
raydium solana exchange
CGMiner Software: Advanced Cryptocurrency Mining Solution for Digital Currency Enthusiasts
Understanding CGMiner
CGMiner represents one of the top mining applications that supports mining Bitcoin, Litecoin, Dogecoin, and numerous other cryptocurrencies. The application supports ASIC, FPGA, and GPU (until version 3.7.2). CGMiner is highly configurable and supports parallel processing, working with multiple pools, as well as distant administration and observation of your mining equipment’s parameters.
Core Capabilities
Support for Multiple Cryptocurrencies
CGMiner specializes in mining diverse crypto assets including Bitcoin (BTC), Litecoin (LTC), Dogecoin (DOGE), and multiple alternative coins with distinct cryptographic algorithms.
Hardware Versatility
The miner operates with three main types of mining hardware:
– ASIC – Specialized chips for maximum efficiency
– FPGA – Configurable integrated circuits for custom mining tasks
– GPU – GPU processors (functional through version 3.7.2)
Enhanced Features
– Flexible configuration – Extensive settings for equipment tuning
– Parallel processing – Maximum utilization of CPU and GPU resources
– Pool diversification – Automatic switching between crypto mining pools
– Distant control – Manage and oversee mining rigs from anywhere
Why Choose CGMiner?
CGMiner stands out for its reliability, exceptional speed, and affordability. It’s absolutely cost-free, publicly available code, and delivers clear reporting for performance analysis. The application’s robust feature set makes it ideal for both small home setups industrial-scale mining activities.
Installation Guide
Installation is straightforward on Linux and Windows platforms. Setup can be performed through configuration files or terminal commands, ensuring usability for all skill levels.
Conclusion
CGMiner continues to be a leading solution for professional crypto mining, delivering the dependability and speed needed for successful mining operations.
With Exodus Wallet, your digital assets are safe, your private keys are yours, and your portfolio is prettier than your ex’s vacation photos.
is exodus a cold wallet
Thanks for the article https://40-ka.ru/
https://t.me/individualki_kazan_chat
Сериал «Уэнсдей» https://uensdey.com мрачная и захватывающая история о дочери Гомеса и Мортиши Аддамс. Учёба в Академии Невермор, раскрытие тайн и мистика в лучших традициях Тима Бёртона. Смотреть онлайн в хорошем качестве.
Die erfahrenen Onkologen hipec spezialisten entwickeln individuelle Behandlungsplane, abgestimmt auf Tumorstadium, Allgemeinzustand und beste Therapieoptionen fur jeden einzelnen Patienten.
Срочно нужен сантехник? https://santehnik-v-almaty.kz в Алматы? Профессиональные мастера оперативно решат любые проблемы с водопроводом, отоплением и канализацией. Доступные цены, выезд в течение часа и гарантия на все виды работ
כאילו האוויר מסביב התחמם. הוא משחרר את ידו ומניח אותו על החזה שלי. לוחץ קלות. אם לא תברח, אעשה אפילו לא רשומים בלוח הזמנים שלי. אבל, אם רק ראית את הילד הזה. חסון, כתף. שרירי הזרוע הם בערך מספרי טלפון של זונות
проект перепланировки квартиры цена http://www.proekt-pereplanirovki-kvartiry4.ru .
drenazhnye-raboty-811.ru .
Kamla Game: A thrilling strategy-driven adventure where players navigate challenges, alliances, and survival in a dynamic, ever-changing world: where to play Kamla game online
Военная флешка https://usb-flashki-optom-24.ru оптом и юсб флешка 64 гб в Магнитогорске. Флешку купить в спб и флешка трансформер в Махачкале. Флешка оптом золотой слиток 16 и флешка для мужчины
EPL중계
Школа стройки и ремонта. Все самое интересное и важное о стройке и ремонте. Также полезные статьи по выбору дизайна интерьера, уходу за садом и огородом, крутые лайфхаки, консультации специалистом и многое другое на страницах нашего блога https://propest.ru/
drenazhnye-raboty-811.ru .
Натуральная косметика россия https://musco.ru
Продаем оконный профиль https://okonny-profil-kupit.ru высокого качества. Большой выбор систем, подходящих для любых проектов. Консультации, доставка, гарантия.
Оконный профиль https://okonny-profil.ru купить с гарантией качества и надежности. Предлагаем разные системы и размеры, помощь в подборе и доставке. Доступные цены, акции и скидки.
посоветуй порно сайт на подобие https://goxxx.org/russkoe-porno/ хочется посмотреть новое русское порно
Crypto storage, portfolio tracker, built-in exchange — Exodus Wallet brings it all together with zero chaos.
exodus wallet usa
Все самое важное и интересное за прошедшую неделю. Новости общества, культуры и экономики, а также достижения науки и автопрома https://comicsplanet.ru/
EPL중계
Все самое интересное на самые волнующие темы: любовь и деньги https://loveandmoney.ru/
Блог с актуальной новостной информацией о событиях в мире. Мы говорим об экономике, политике, обществе, здоровье, строительстве и о других важных направлениях https://sewingstore.ru/
купить стильный горшок https://dizaynerskie-kashpo-nsk.ru .
Все про политику, культуру, туризм и шоу бизнес. Также полезные статьи про медицину и обзор событий в мире ежедневно в нашем блоге https://agyha.ru/
Статья про снять квартиру в адлере зашла. Подробности: снять квартиру в адлере.
Многие годы мы предоставляем актуальные новости, обзоры и события из мира автомобилей, освещая как крупные мировые автопроизводители, так и события, влияющие на российских водителей. Наши материалы охватывают широкий спектр тем, от новых моделей автомобилей до акций протеста автовладельцев. Мы стремимся быть вашим надежным источником информации в автомобильной сфере https://n-avtoshtorki.ru/
ремонт кофемашин miele ремонт кофемашин nespresso
Deneme Bonusu Veren Siteler ile yatırım yapmadan oyun keyfi yaşa. Lisanslı ve güvenilir platformlarda risksiz kazanç fırsatını yakala!
анальные гомики!
Після тестування різних онлайн-сервісів 18+ я зрозумів, що lovespace.ua — справжній топ порно сайт серед українських користувачів.
Переглянь онлайн-ресурс для порно lovespace.ua за посиланням нижче:
порно лисби
ремонт швейных машин brother ремонт швейных машин чайка
аренда 1с в облаке облако решений 1с
Lisanslı ve denetlenen Deneme Bonusu Veren Siteler ile risksiz oyun oyna, kazancını güvenle çekmenin keyfini yaşa.
Para yatırmadan şansını dene! Deneme Bonusu Veren Siteler listesiyle güvenilir platformlarda kazanca adım at.
дрочуны!
Після тестування різних онлайн-сервісів 18+ я зрозумів, що lovespace.ua — справжній улюбленець багатьох дрочерів.
Зазирни офіційний порно сайт lovespace.ua за цим посиланням:
порно тайки
Після дрочки на різних платформ для перегляду порно я зрозумів, що sex-shop.ua — це кращий вибір для перегляду гейського порно.
Зазирни головну порно сторінку sex-shop.ua за цим посиланням i смачно подрочи:
порно на
Після дрочки на різних сайтов с парнушкой я зрозумів, що sex-shop.ua — це кращий вибір для перегляду гейського порно.
Відвідай онлайн-ресурс для порно sex-shop.ua за лінком внизу i смачно подрочи:
мадлен райт порно
Cosmetology office prices Cosmetology office prices .
코인선물거래소
кофемашина рожковая ремонт ремонт кофемашин стоимость
номер ремонта швейных машин услуги ремонта швейных машин
1с облако для ип программа 1с в облаке
Все про уютный дом, как сделать дом уютным для всех, советы по ведению дома, как создать уют в доме своими руками, советы по дизайну интерьера https://ujut-v-dome.ru/
косметолог красноярск клиники http://www.kosmetologiya-krasnoyarsk-1.ru .
фундамент плита цена .
Блог актуальной новостной информации, где 24 часа в сутки собираются все самые важные события, произошедшие в России и мире https://kopipasta.ru/
cgminer download
CGMiner Software: Effective Mining Solution for Crypto Miners
What is CGMiner?
CGMiner represents one of the top mining applications that allows mining Bitcoin, Litecoin, Dogecoin, and many other coins. The software is compatible with ASIC, FPGA, and GPU (versions up to 3.7.2). CGMiner is highly configurable and provides multi-threaded mining, operating across multiple pools, as well as distant administration and observation of equipment operational parameters.
Main Features
Multi-Currency Support
CGMiner performs exceptionally well with diverse crypto assets including Bitcoin (BTC), Litecoin (LTC), Dogecoin (DOGE), and various altcoins with various mining algorithms.
Flexible Hardware Support
The application works with multiple categories of mining hardware:
– ASIC – Specialized chips for maximum efficiency
– FPGA Devices – Programmable logic devices for specialized mining operations
– GPU – Video cards (compatible until version 3.7.2)
Advanced Capabilities
– Flexible configuration – Comprehensive options for equipment tuning
– Parallel processing – Optimal exploitation of CPU and GPU resources
– Multiple pool compatibility – Automatic switching between mining platforms
– Remote administration – Control and monitor equipment from any location
What Makes CGMiner Special?
CGMiner excels for its stability, high performance, and cost-effectiveness. It’s completely free to use, open source, and delivers clear reporting for performance analysis. The miner’s comprehensive functionality renders it perfect for both small home setups enterprise mining operations.
Getting Started
Installation is straightforward on Linux and Windows platforms. Customization is possible through configuration files or terminal commands, providing accessibility for users of all experience levels.
Conclusion
CGMiner persists as one of the top choices for dedicated digital currency mining, providing the dependability and speed essential for effective cryptocurrency extraction.
ushp-fundament-499.ru .
фокус юа
Актуальный новостной блог, где ежедневно публикуются все самые значимые события, произошедшие за последние сутки в самых различных регионах земного шара https://dip-kostroma.ru/
ushp-fundament-499.ru .
ушп под ключ цена за м2 .
Лоукост авиабилеты https://lowcost-flights.com.ua по самым выгодным ценам. Сравните предложения ведущих авиакомпаний, забронируйте онлайн и путешествуйте дешево.
Предлагаю услуги https://uslugi.yandex.ru/profile/DmitrijR-2993571 копирайтинга, SEO-оптимизации и графического дизайна. Эффективные тексты, высокая видимость в поиске и привлекательный дизайн — всё для роста вашего бизнеса.
I recommend https://ancientcivs.ru/
click here to read
toast wallet login
как использовать бонусный счет в 1вин http://www.1win1170.ru
1 win скачать на андроид http://1win1170.ru
their website
toast wallet login
look what i found
jaxx wallet chrome
weblink
jaxx wallet online
Lamoda Sport Outlet в Румба — оригинальная продукция Adidas и других брендов со скидками круглый год. Спортивная одежда, обувь и аксессуары по лучшим ценам в Санкт-Петербурге. Успейте купить выгодно https://rumbastock.ru/shops/lamoda-sport-outlet/
https://kazan.land/
click now
toast wallet download
navigate to these guys
jaxx wallet chrome
АО «ГОРСВЕТ» в Чебоксарах https://gorsvet21.ru профессиональное обслуживание объектов наружного освещения. Выполняем ремонт и модернизацию светотехнического оборудования, обеспечивая комфорт и безопасность горожан.
Онлайн-сервис like zaim займ на карту или счет за несколько минут. Минимум документов, мгновенное одобрение, круглосуточная поддержка. Деньги в любое время суток на любые нужды.
Приглашаем вас совершить виртуальное путешествие без границ с помощью удобного сервиса «Веб-камеры мира онлайн». Все страны мира, как на ладони, на расстоянии одного клика: https://world-cam.ru/
Custom Royal Portrait turnyouroyal.com an exclusive portrait from a photo in a royal style. A gift that will impress! Realistic drawing, handwork, a choice of historical costumes.
Открыть онлайн брокерский счёт – ваш первый шаг в мир инвестиций. Доступ к биржам, широкий выбор инструментов, аналитика и поддержка. Простое открытие и надёжная защита средств.
bazaindex.ru
прямоугольный горшок с автополивом прямоугольный горшок с автополивом .
https://newskor.com.ua/u-khmelnytskomu-pokazaly-iak-vyhliadatyme-palats-sportu-za-300-mln-hryven/
1win ставки приложение 1win ставки приложение
betci adresi kullanıcılarının daha keyifli ve kazançlı bahis deneyimleri yaşayabilmesi için yoğun çaba göstermektedir. Sen de betci ailesine katıl ve kazançlı dakikalara ortak ol!
1win скачать на андроид бесплатно на русском http://www.1win1174.ru
купить диплом вуза с проводкой https://www.arus-diplom31.ru .
Увеличьте свою аудиторию с помощью лайки youtube!
Подписчики в Телеграме — это важный аспект ведения успешного канала. Умение привлекать и удерживать подписчиков важно для роста и популярности вашего Телеграм-канала.
Первый шаг к увеличению числа подписчиков — это создание качественного контента. Генерация интересного контента критически важна для привлечения новой аудитории.
Другим способом увеличения числа подписчиков является проведение активной рекламной кампании. Использование социальных сетей для рекламы канала может значительно ускорить прирост подписчиков.
Регулярное взаимодействие с вашей аудиторией способствует не только ее удержанию, но и привлечению новых подписчиков. Общение с подписчиками и узнание их интересов важно для создания качественного контента.
1win скачать ios 1win скачать ios
автоматика somfy http://avtomatika-somfy.ru .
После завершения ремонта вам потребуется генеральная уборка квартиры после ремонта, чтобы вернуть дому чистоту и порядок.
Уборка после ремонта — важный этап, который часто игнорируется. Правильная уборка поможет не только избавиться от строительной пыли, но и создать комфортные условия для жизни.
Первым делом стоит удалить крупный мусор, который остается после всех работ. Затем следует провести более детальную уборку, которая включает в себя вытирание пыли с поверхностей и мытье полов.
Не стоит забывать о сложных для очистки местах, где может скапливаться грязь. Эти места, как правило, игнорируются и могут привести к возникновению неприятных запахов.
Когда уборка окончена, нужно подумать о добавлении приятных ароматов в пространство. Ароматические масла или свечи могут существенно улучшить общее впечатление от нового интерьера.
консультация юриста в москве помощь юриста бесплатно онлайн по телефону
pocket option nedir ile güvenle işlem yapmaya başlayın ve sezgisel ve güçlü bir platformdan yararlanın!
Нужен вентилируемый фасад: подсистема для вентилируемого фасада
Нужны пластиковые окна: окна пластиковые купить алматы
мелбет кыргызстан мелбет кыргызстан
1ч ставка зеркало http://1win1173.ru
I truly appreciate your technique of writing a blog. I added it to my bookmark site list and will
1аин вход https://www.1win1172.ru
технониколь ушп .
Mega ссылка
сколько стоят работы по заливке фундамента .
Mega онион
Inizia a fare trading in tutta sicurezza con pocket option ios e goditi una piattaforma intuitiva e potente!
кракен онион тор
Поделюсь крутой находкой – универсальный портал с массой полезностей!
Лично мне очень помогла статья: Как работать с партнерами при M&A
Здесь можно найти ответы на любые вопросы, воспользоваться онлайн-сервисами и даже разместить объявление. Очень удобно!
Hey portfolio builder Stack your gains with Meteora’s Solana-powered liquidity tools.
meteora solana api
кракен даркнет
приводы somfy http://avtomatika-somfy.ru .
дизайнерское кашпо напольное dizaynerskie-kashpo-rnd.ru .
kraken сайт зеркала
Открыл для себя многофункциональный портал – просто находка для активных людей!
Особенно впечатлила статья: 10 детских палаток – внутренние, для игр, с тоннелем
Сочетает в себе блог, новостной портал, справочник, сервисы и доску объявлений. Всё необходимое под рукой в одном месте!
нажмите здесь Трипскан сайт вход в личный кабинет
nyc package delivery service https://delivery-new-york.com
выберите ресурсы Трипскан сайт вход
кракен ссылка kraken
cgminer download
CGMiner: Effective Mining Solution for Crypto Miners
What is CGMiner?
CGMiner is one of the best miners that supports mining Bitcoin, Litecoin, Dogecoin, and many other coins. The application supports ASIC, FPGA, and GPU (up to version 3.7.2). CGMiner is adaptable in configuration and offers multi-threaded processing, working with multiple pools, as well as distant administration and observation of your mining equipment’s parameters.
Core Capabilities
Multi-Currency Support
CGMiner performs exceptionally well with multiple digital currencies including Bitcoin (BTC), Litecoin (LTC), Dogecoin (DOGE), and multiple alternative coins with different algorithms.
Hardware Versatility
The application is compatible with several types of mining hardware:
– Application-Specific Integrated Circuits – Dedicated processors for peak efficiency
– FPGA – Programmable logic devices for specialized mining operations
– GPU – Graphics cards (supported up to version 3.7.2)
Sophisticated Functions
– Adaptable settings – Detailed controls for hardware optimization
– Multi-threaded operations – Maximum utilization of computing resources
– Pool diversification – Automatic failover between mining platforms
– Remote management – Control and monitor equipment from remote locations
Why Choose CGMiner?
CGMiner stands out for its stability, superior processing power, and cost-effectiveness. It’s completely free to use, open-source, and provides transparent logging for efficiency evaluation. The software’s robust feature set renders it perfect for both domestic and enterprise mining operations.
Installation Guide
Setup is simple on Linux and Windows platforms. Setup can be performed through configuration files or terminal commands, providing accessibility for users of all experience levels.
Conclusion
CGMiner continues to be among the best options for dedicated digital currency mining, offering the stability and efficiency essential for effective cryptocurrency extraction.
узнать трипскан сайт вход
Русское домашнее порно смотри бесплатное порно Сводная сестра трахается в попу с братом: горячий анальный эксперимент!
этот контент Трипскан личный кабинет сайт вход
Мега даркнет
Güncel ve güvenilir deneme bonusu veren siteler listesi. En iyi bahis siteleri bonus fırsatlarıyla kazanmaya hemen başlayın. bihis sitiliri
Mega onion
Подробнее Трипскан рабочий сайт
Подробнее здесь трипскан
Viagra * Cialis * Levitra
All the products you are looking suitable are currently convenient for the duration of 1+1.
4 more tablets of one of the following services: Viagra * Cialis * Levitra
https://pxman.net
аренда авто тайланд пхукет
Аренда авто на Пхукете — это отличный способ исследовать остров. С таким вариантом вы сможете легко добраться до множества интересных достопримечательностей.
На Пхукете множество компаний, предоставляющих услуги аренды автомобилей. Они предлагают различные модели и классы автомобилей.
Перед подписанием контракта на аренду автомобиля ознакомьтесь с условиями договора. Проверьте, включена ли страховка в стоимость аренды.
Не забывайте о правилах дорожного движения, действующих в Таиланде. Водители здесь двигаются по левой стороне дороги, что может быть неожиданностью.
Viagra * Cialis * Levitra
All the products you are looking suitable are currently at one’s disposal for the duration of 1+1.
4 more tablets of identical of the following services: Viagra * Cialis * Levitra
https://pxman.net
What’s up, crypto crew? Tired of DeFi that feels like rocket science? Raydium keeps it simple, with swaps, farms, and launches all under one hood.
raydium exchange
An impressive share! I’ve just forwarded this onto a colleague who has been doing a little homework on this. And he actually ordered me breakfast due to the fact that I discovered it for him… lol. So allow me to reword this…. Thanks for the meal!! But yeah, thanks for spending time to discuss this topic here on your web page.
Seattle limo rates
точный прогноз на спорт сегодня точный прогноз на спорт сегодня .
узнать больше Трипскан рабочий сайт
Клининговая компания в Москве предлагает широкий спектр услуг для поддержания чистоты вашего дома или офиса.
Клининг в Москве стал популярной услугой в последние годы. Это наверняка объясняется тем, что у людей все меньше свободного времени на домашние дела.
Организации, занимающиеся клинингом, предоставляют разные виды услуг. Клиенты могут заказать уборку квартир, офисов или даже коммерческих помещений. Это создает возможность для клиента подобрать подходящий вариант.
Большинство клининговых организаций используют эффективные средства и новейшие технологии. Применение технологий позволяет достигнуть высокого качества уборки. Заказчики могут рассчитывать на отличный результат и идеальную чистоту.
Выбирая клининговую организацию, важно ознакомиться с отзывами предыдущих клиентов. Это поможет сделать правильный выбор и найти проверенную компанию. Также важно обсудить все нюансы услуги и ее стоимость до начала работ.
Hi, crypto fan! With SushiSwap, you keep control while maximizing returns.
sushiswap
sushi-live.com
Hello! Want the best swap aggregator? Jupiter on Solana guarantees fast exchange, low slippage, and deep liquidity support for traders.
jupiter solana
этот контент Трипскан сайт вход в личный кабинет
This is really interesting, You are a very skilled blogger.
I’ve joined your rss feed and look forward to seeking more
of your great post. Also, I have shared your website in my social networks!
kraken onion ссылка
Hello! Thinking of crypto swaps? Jup.ag ensures Solana token exchange with deep liquidity, secure routing, and instant trades across the decentralized finance ecosystem.
jupiter dex
ушп для каркасного дома .
kraken рабочая ссылка onion
mostbet kg регистрация mostbet kg регистрация
мостбет скачать приложение https://mostbet11071.ru
сайт kraken darknet
zakazat-ushp-fundament-499.ru .
мостбет скачать на компьютер https://mostbet11069.ru
Thanks for the article https://www.brownbook.net/business/54153745/%D0%BC%D0%B0%D0%B3%D0%B0%D0%B7%D0%B8%D0%BD-%D1%80%D1%8B%D0%B1%D0%B0%D1%87%D0%BE%D0%BA .
Thanks for the article http://www.askmap.net/location/7496203/ukraine/%D1%80%D1%8B%D0%B1%D0%B0%D1%87%D0%BE%D0%BA .
mostbet online app http://mostbet11069.ru
Смотрите лучшие сериалы и фильмы онлайн в хорошем качестве без регистрации. На сайте собраны популярные новинки, полные сезоны и редкие проекты, доступные бесплатно 24/7. Удобный интерфейс и быстрый доступ к контенту для комфортного просмотра на любом устройстве: https://lordserialofficial.ru/
мостбет сайт вход mostbet11067.ru
точные прогнозы на футбол от аналитиков https://kompyuternye-prognozy-na-futbol13.ru .
Создайте уникальный штамп с помощью нашего online stamp design maker всего за несколько кликов!
The process of making a rubber stamp online is simpler than ever. In a matter of minutes, you can create a unique rubber stamp. Such ease of use benefits both individuals and businesses looking to save time and resources.
When choosing a rubber stamp maker, consider the range of options available. Many websites offer templates that can be further customized to suit your needs. You also have the option to upload custom designs, allowing for complete personalization.
Pay attention to the quality of the rubber stamps produced by online services. Look for reviews and testimonials to gauge customer satisfaction. A durable rubber stamp will yield high-quality impressions that last.
Finally, consider the delivery options available when ordering your rubber stamp. Many providers offer fast shipping to ensure you receive your stamp promptly. Be aware of potential extra charges for faster delivery services.
mostbet казино http://mostbet11072.ru
delivery new york nyc package delivery
цветочный горшок с автополивом купить цветочный горшок с автополивом купить .
https://huntdown.info/kak-udobnee-dobratsya-iz-aeroporta-pragi-v-karlovy-vary/
SEO Pyramid 10000 Backlinks
Backlinks of your site on community platforms, blocks, threads.
Backlinks – three steps
Phase 1 – Basic inbound links.
Phase 2 – Links via 301 redirects from highly reliable sites with PR 9–10, for example –
Phase 3 – Adding to backlink checkers –
The key benefit of SEO tools is that they highlight the Google search engine a website structure, which is crucial!
Clarification for the third stage – only the homepage of the site is submitted to SEO checkers, other pages aren’t accepted.
I complete all steps step by step, resulting in 10 to 30 thousand inbound links from the three stages.
This backlink strategy is most effective.
Example of placement on analyzer sites via a TXT file.
Tremendous issues here. I am very happy to look your article. Thank you so much and I’m having a look ahead to touch you. Will you kindly drop me a mail?
http://infobus.com.ua/yak-obraty-idealni-fary-dlya-vashoho-avto-porady-e.html
тут лучшее бесплатное порно
Rainbet Casino
**Info Terbaru Lomba Spin Toto Slot 88 & Tebak Angka Togel 4D Unggulan – TOGELONLINE88**
kraken ссылка зеркало
kraken ссылка зеркало
https://kaztur.ru/
CactusPay – приём оплат: РУ карты, СБП, СБП по QR, криптовалюта. Вывод средств на USDT TRC-20. Подходит для 18+ контента, эскорта, гемблинга, беттинга, инфобизнеса, товарки, донатов, P2P. Быстрое подключение, моментальные выплаты, анонимность, надёжность https://cactuspay.org/
kraken зеркало рабочее
кракен онион тор
Crypto should be fast and fun. Raydium delivers both with Solana speed and sleek design.
raydium swap Los Angeles
Hey DeFi builder Construct passive income with Meteora’s liquidity solutions.
meteora swap
Hi i am kavin, its my first occasion to commenting anyplace, when i read this piece of writing i thought i could also create comment due to this brilliant article.
https://jesus.com.ua/chomu-linzy-dlya-far-naykrashchiy-vibir-dlya-vashogo-avto
Если вы планируете строительство или ремонт, важно заранее позаботиться о выборе надежного поставщика бетона. От качества бетонной смеси напрямую зависит прочность и долговечность будущего объекта. Мы предлагаем купить бетон с доставкой по Иркутску и области – работаем с различными марками, подробнее https://profibetonirk.ru/
ставки прогнозы https://www.stavki-prognozy-2.ru .
топливные карты для юридических лиц
This is one very informative blog. I like the way you write and I will bookmark your blog to my favorites.
best casinos for Xmas Drop play
GMO Gaika Reputation – Pros, Cons, and the Truth About Withdrawal Refusals
GMO Gaika is widely used by both beginners and experienced FX traders. Its popularity stems from easy-to-use trading tools, stable spreads, and a high level of trust due to its operation by a major Japanese company. Many users feel secure thanks to this strong domestic backing.
On the other hand, there are some online rumors about “withdrawal refusals,” but in most cases, these are due to violations of terms or incomplete identity verification. GMO Gaika’s transparent response to such issues suggests that serious problems are not a frequent occurrence.
You can find more detailed insights into the pros and cons of GMO Gaika, as well as real user experiences, on the trusted investment site naughty-cao.jp. If you’re considering opening an account, it’s a good idea to review this information beforehand.
ゼントレーダーで始める|Zenブログで深める賢い投資ライフ
最近、投資をよりシンプルに、そして効率的に始めたいと考える人々の間で注目されているのが「ゼントレーダー(Zentrader)」です。登録から取引までが非常にスムーズで、初心者にもわかりやすい設計が魅力です。
特に「Zenブログ」では、投資に関する基本知識から実践的な取引戦略まで、幅広い情報が発信されており、学びながら実践できる環境が整っています。日々のマーケット動向やトレンドも分かりやすく解説されているため、忙しい人でも効率よく情報収集が可能です。
さらに、投資初心者がつまずきやすいポイントやリスク管理の方法についても、https://social-consulting.jp/ にて実践的なアドバイスが紹介されています。投資を「感覚」ではなく「戦略」として考えたい方におすすめです。
Купить бетон в Иркутске стало проще – вы можете заказать нужный объем прямо с завода, без посредников и переплат. Мы производим товарный бетон на современном оборудовании, контролируя каждый этап. Наша продукция используется при строительстве частных домов, промышленных объектов, дорог и фундаментов, узнайте больше по ссылке https://proirkbeton.ru/
Xmas Drop game
umsuka
When we look at these issues, we know that they are the key ones for our time.
блэкспрут сайт
https://cosmoreviews.club/stati/54115-kak-vybrat-luchshie-kursy-anglijskogo-yazyka-dlya-detej-10-let-sovety-i-rekomendaczii.html
blacksprut сайт
plinko game online https://plinko3001.ru
блэкспрут вход
melbet avis https://melbet3006.com/
togel 88
TOGELONLINE88 hadirkan berita seru tentang lomba spin Toto Slot 88 dan pasang angka togel 4D terbaik. Platform ini menawarkan sistem terpercaya berstandar tinggi, informasi terverifikasi, sekaligus kenyamanan bermain dengan sistem terorganisir.
Selain itu, TOGELONLINE88 juga menyediakan berbagai provider mesin slot dan tembak ikan siap dimainkan 24/7 tanpa batas, dengan potensi memenangkan hadiah jackpot maksimal yang luar biasa besar.
Bagi para pecinta permainan togel dan slot online, TOGELONLINE88 adalah destinasi utama karena menjamin kemudahan, proteksi, dan keseruan saat bermain. Dengan penawaran istimewa beserta platform user-friendly, situs ini memberikan pengalaman bermain yang luar biasa.
Jadi, tunggu apa lagi? Segera ikuti event putar Toto Slot 88 dan prediksi angka 4D terpercaya exclusively di TOGELONLINE88. Raih peluang jackpot besar dan nikmati sensasi hadiah jackpot maksimal yang fantastis!
блэкспрут вход
blacksprut com зеркало
горшки с автополивом для комнатных растений горшки с автополивом для комнатных растений .
плинко кз plinko3001.ru
Популярный выбор у азартных пользователей — Казино X.
Яркие эмоции подарит 10 Fruitata Wins играть в Вавада прямо сейчас.
dingdongtogel login
блэкспрут вход
**Info Terbaru Lomba Spin Toto Slot 88 & Pasang Angka Togel 4D Terbaik – TOGELONLINE88**
Отличный выбор для игры — 10000 Wolves 10K Ways играть в Чемпион казино.
блэкспрут вход
The popular slot 10000 Wonders MultiMax attracts thousands of players worldwide.
диплом с занесением в реестр купить диплом с занесением в реестр купить .
купить диплом ижевск с занесением в реестр купить диплом ижевск с занесением в реестр .
Всех приветствую! Хотите узнать больше о продвижении? Подробная информация на тему: https://www.iscraes.org/2020/11/20/hello-world/
блэкспрут дакрнет
секреты красоты beautyhealthclub
Hello, its nice article on the topic of media print, we all be familiar with media is a enormous source of facts.
Limousine Transportation Service
сайт услуги косметолога сайт услуги косметолога .
оценка акций ао заказать оценку Москва
blacksprut вход
ankara çocuk diyetisyeni
мелбет кз http://www.melbet3006.com
blacksprut onion
blacksprut darknet
ставки прогнозы http://www.stavki-prognozy-2.ru .
blacksprut вход
I used to be recommended this web site by means of my cousin. I am
not positive whether this post is written via
him as no one else know such certain approximately
my trouble. You’re wonderful! Thank you!
Откройте для себя мир азартных игр на казино 888starz ru.
888starz — это популярная платформа для азартных игр, который предлагает разнообразие возможностей для игроков. Платформа включает в себя как слоты, так и настольные игры, чтобы удовлетворить запросы всех игроков.
888starz предлагает удобный интерфейс, что облегчает процесс игры. Регистрация и навигация по платформе не вызывают затруднений у игроков.
Пользователи могут быстро зарегистрироваться и начать игру. После предоставления необходимой информации игроки смогут активировать свои аккаунты.
Платформа также предлагает разнообразные бонусы и акции для новых пользователей. Акции и бонусы создают дополнительные возможности для выигрыша, увеличивая интерес к играм.
как зайти на blacksprut
купить дипломы техникума старого образца купить дипломы техникума старого образца .
Для любителей азарта доступно проверенное Казино Mostbet с выгодными бонусами.
блэкспрут онион
купить дипломы о высшем образовании в киеве купить дипломы о высшем образовании в киеве .
Ценители классики выбирают Казино Leonbets, которое давно известно игрокам.
Любая 100 Lucky Bell игра подарит адреналин и азарт.
For latest news you have to pay a quick visit world-wide-web and on the web I found this web page as a finest website for hottest updates.
кат казино
Добрый день!
Долго думал как поднять сайт и свои проекты и нарастить CF cituation flow и узнал от крутых seo,
крутых ребят, именно они разработали недорогой и главное лучший прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Как собрать базу для Xrumer – важный шаг для эффективного прогона. Программа использует базы форумов для размещения ссылок. Массовый линкбилдинг ускоряет рост DR. Чем больше качественных ссылок, тем выше позиции сайта. Как собрать базу для Xrumer помогает новичкам и профессионалам.
seo интернет магазина битрикс, seo ru топ сайт, Xrumer: создание ссылочной массы
линкбилдинг пример, заказать продвижение сайта techdeck, работы seo
!!Удачи и роста в топах!!
Попробуйте слоты и лайв-игры в Казино 1win, где всегда есть акции для новых игроков.
Самые популярные онлайн казино для игры 101 Lions собраны в одном месте.
I got this website from my friend who told me about this website and at the moment this time I am visiting this web page and reading very informative posts at this place.
knifeworks.ru
Доброго!
Долго думал как поднять сайт и свои проекты и нарастить ИКС Яндекса и узнал от гуру в seo,
отличных ребят, именно они разработали недорогой и главное продуктивный прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Xrumer форумный спам – эффективный способ продвижения в поисковиках. Прогон ссылок через форумы улучшает SEO-показатели за короткий срок. Автоматизация линкбилдинга экономит время и силы. Увеличение ссылочной массы приводит к росту DR и Ahrefs. Используйте Xrumer для создания качественных внешних ссылок.
продвижение созданного интернет сайта, сервисы для seo продвижения, Создание ссылочной массы в 2025
Прогон ссылок Хрумером, продвижение сайта в германии, продвижение сайта цены в москве
!!Удачи и роста в топах!!
Привет всем!
Долго не мог уяснить как поднять сайт и свои проекты и нарастить CF cituation flow и узнал от гуру в seo,
энтузиастов ребят, именно они разработали недорогой и главное лучший прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Xrumer ускоряет процесс линкбилдинга и помогает улучшить DR и Ahrefs. Массовые рассылки на форумах с Xrumer помогают создать качественные внешние ссылки. Программы для линкбилдинга позволяют вам быстро увеличить ссылочную массу. Прогон ссылок с Xrumer помогает улучшить видимость вашего сайта в поисковой выдаче. Используйте Xrumer для быстрого SEO-продвижения.
seo белые методы, поисковое продвижение интернет сайтов, Прогон ссылок для повышения авторитета
линкбилдинг работа, seo seas, уникальность сео
!!Удачи и роста в топах!!
Привет всем!
Долго анализировал как поднять сайт и свои проекты и нарастить TF trust flow и узнал от друзей профессионалов,
крутых ребят, именно они разработали недорогой и главное буст прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон ссылок через Xrumer увеличивает внешнюю массу сайта. Эффективность прогона Xrumer подтверждается результатами. Массовый линкбилдинг для сайта улучшает позиции в поиске. Программы для автоматического постинга ускоряют работу. Как поднять показатели Ahrefs становится более доступным.
смм и сео, форумы по сео, Xrumer: советы и трюки
каталоги линкбилдинг, задача сео, договор продвижение сайтов
!!Удачи и роста в топах!!
Яркая графика и бонусные раунды ждут в 20 Boost Hot слот.
Привет всем!
Долго анализировал как поднять сайт и свои проекты и нарастить TF trust flow и узнал от успещных seo,
топовых ребят, именно они разработали недорогой и главное лучший прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Автоматический постинг форумов с Xrumer ускоряет создание качественных ссылок. Прогон ссылок Хрумером помогает значительно увеличить DR. Массовый линкбилдинг через Xrumer улучшает видимость сайта в поисковых системах. Увеличение показателей Ahrefs происходит в короткие сроки. Воспользуйтесь этим мощным инструментом для повышения авторитетности сайта.
seo сайт программа, обучение созданию сайтов и продвижению бесплатное, Рассылки с помощью Xrumer
Как поднять DR сайта за неделю, ключи сео это, консультация сео
!!Удачи и роста в топах!!
Ziatogel
It’s easy to play 101 Lions in best casinos with just a few clicks.
Hello crypto enthusiast PancakeSwap exchange brings BNB trading secure staking and farming pools with the best APY rewards
pancakeswap usa
масла aromatmaslo
купить диплом для иностранцев купить диплом для иностранцев .
Доброго!
Долго анализировал как поднять сайт и свои проекты и нарастить TF trust flow и узнал от друзей профессионалов,
энтузиастов ребят, именно они разработали недорогой и главное продуктивный прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Предлагаю линкбилдинг использовать с Xrumer для ускорения продвижения. Линкбилдинг сервис позволяет экономить время. Линкбилдинг интернет магазина помогает продажам. Каталоги линкбилдинг дают качественные ссылки. Линкбилдинг сервисы упрощают работу специалистов.
зачем seo, продвижение сайта стоимость новосибирск, Как настроить Xrumer для рассылок
Автоматизированный постинг для сайтов, автоматическое seo продвижение сайта, стоимость сайта с продвижением
!!Удачи и роста в топах!!
Откройте для себя мир комфорта с автоматическими рулонными шторами с электроприводом, которые идеально подходят для создания уюта в вашем доме.
Электрические рулонные шторы — это удобное и стильное решение для современных интерьеров. Использование рулонных штор с электроприводом делает интерьер более функциональным и эстетичным.
Главные достоинства рулонных штор с автоматическим управлением трудно переоценить . Управление такими шторами с помощью пульта делает их использование комфортным и практичным. Во-вторых, электроника позволяет настраивать режим работы штор в зависимости от времени суток .
Электрические рулонные шторы подойдут для любого типа помещений. Их часто устанавливают в спальнях, гостиных и офисах . Однако для установки рулонных штор нужно предусмотреть наличие источника электричества .
Фактор выбора материала и дизайна штор также играет важную роль. Можно найти рулонные шторы в самых разнообразных вариантах, что помогает гармонично вписать их в интерьер. Наконец, стоит заметить, что есть возможность заказать шторы по индивидуальным размерам.
Попробуйте 20 Hot Bar играть в леонбетс и ощутите драйв.
Если хотите испытать азарт, стоит попробовать 15 Coins играть онлайн.
Добрый день!
Долго думал как поднять сайт и свои проекты и нарастить ИКС Яндекса и узнал от крутых seo,
энтузиастов ребят, именно они разработали недорогой и главное лучший прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Xrumer помогает создавать ссылки автоматически и быстро. Прогон Хрумер для сайта улучшает SEO-результаты. Увеличение DR и Ahrefs становится доступным даже для новичков. Форумный спам позволяет создавать мощный ссылочный профиль. Начните с Xrumer для эффективного продвижения.
текст сео требования, ашманов продвижения сайта, Линкбилдинг для продвижения в топ-10
Как поднять DR сайта за неделю, изготовление сайтов и раскрутка, seo оптимизация сайта магазина
!!Удачи и роста в топах!!
Добрый день!
Долго ломал голову как поднять сайт и свои проекты и нарастить TF trust flow и узнал от гуру в seo,
профи ребят, именно они разработали недорогой и главное лучший прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Качественный линкбилдинг обеспечивает стабильный рост DR. Ссылки с проверенных ресурсов повышают доверие поисковиков. Программы для автоматизации ускоряют создание линков. Чем выше качество ссылок, тем лучше результат. Качественный линкбилдинг – ключ к топовым позициям.
the seo framework, продвижение сайтов 89303301179, Xrumer для массового линкбилдинга
линкбилдинг с чего начать, интернет магазин без сео, бизнес по продвижению сайта
!!Удачи и роста в топах!!
Добрый день!
Долго обмозговывал как поднять сайт и свои проекты и нарастить CF cituation flow и узнал от друзей профессионалов,
энтузиастов ребят, именно они разработали недорогой и главное продуктивный прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Линкбилдинг курс ускоряет обучение специалистов. Линкбилдинг Москва предоставляет локальные возможности. Линкбилдинг курсы помогают освоить Xrumer. Линкбилдинг план позволяет системно создавать ссылки. Линкбилдинг правила обеспечивают безопасное продвижение.
сервис автоматического продвижения сайта, бесплатно раскрутки сайтов, Генерация внешних ссылок быстро
Увеличение показателя Ahrefs, сео продвижение санкт петербург, задачи для продвижения сайта
!!Удачи и роста в топах!!
Bu, en güvenilir online casinolar arasında.
https://alshoroukegy.com/2025/03/14/vdcasino-resmi-giris-yaparak-spor-bahisleri-ve-casino-oyunlarina-aninda-erisim-saglayin/
На сайте https://eqvo.ru вы найдёте всё необходимое для комфортной игры онлайн.
Ценители классики выбирают Казино Leonbets, которое давно известно игрокам.
Thanks for the article https://kemt.at.ua/forum/19-18719-1 .
server host vps vps hosting
Thanks for the article https://telegra.ph/Kakoj-shnur-luchshe-dlya-spinninga-Pletenka-ili-monoleska-01-13 .
Начните прямо сейчас и попробуйте 20 Boost Hot играть бесплатно.
Отличный выбор для игры — 101 Lions играть в Чемпион казино.
тележка косметологическая стул косметолога со спинкой купить
Доброго!
Долго анализировал как встать в топ поисковиков и узнал от крутых seo,
крутых ребят, именно они разработали недорогой и главное лучший прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Xrumer 2024: настройка и запуск автоматизированного линкбилдинга. Прогон Хрумер для сайта помогает улучшить видимость в поисковиках. Форумный спам с Xrumer создаёт мощный ссылочный профиль. Увеличение DR сайта становится реальным за счёт точной настройки рассылок. Используйте Xrumer, чтобы достичь результатов быстрее.
reg ru seo продвижение, как правильно написать seo заголовок, Форумные проги для SEO
Массовое размещение ссылок на форумах, курсы по создания сайта и продвижению, как подобрать ключевые слова для seo
!!Удачи и роста в топах!!
Любая 20 Hot Bar игра подарит адреналин и азарт.
https://igrushki-svoimi-rukami.ru/
горшки для цветов с поливом https://www.kashpo-s-avtopolivom-spb.ru .
Ещё один проверенный бренд — Казино 1xbet, где слот доступен круглосуточно.
Добрый день!
Долго не мог уяснить как поднять сайт и свои проекты и нарастить CF cituation flow и узнал от крутых seo,
топовых ребят, именно они разработали недорогой и главное лучший прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон ссылок через Xrumer помогает вам улучшить DR и Ahrefs вашего сайта. Массовые рассылки на форумах увеличивают ссылочную массу и ускоряют линкбилдинг. Программы для линкбилдинга с Xrumer создают качественные ссылки для вашего сайта. Увеличение авторитетности сайта с помощью Xrumer даёт стабильные результаты. Попробуйте Xrumer для успешного SEO-продвижения.
seo user, seo специалист курс, Использование Xrumer в SEO-кампаниях
Как прокачать сайт через Xrumer, seo продвижение сайта сеотика, seo specialist
!!Удачи и роста в топах!!
Рулонные шторы блэкаут с электроприводом идеально подойдут для создания уюта и контроля освещения в вашем доме.
идеальное решение для. Эти шторы эффективно блокируют свет, что позволяет создать темную обстановку в любое время суток.
Одним из главных преимуществ рулонных штор с электроприводом является. С помощью пульта можно легко управлять такими шторами, что делает их идеальными для современных интерьеров.
К тому же, рулонные шторы блэкаут легко устанавливаются. Вы можете выбрать различные варианты крепления. Таким образом, вы сможете легко установить шторы на любые окна.
Важно отметить, что электроприводные рулонные шторы блэкаут имеют. Это поможет вам сохранить тепло в холодное время года. В итоге, рулонные шторы с блэкаутом и электроприводом станут не только эстетичным, но и функциональным решением.
Thanks for the article http://farit.tforums.org/viewtopic.php?f=13&t=2518 .
Привет всем!
Долго не мог уяснить как поднять сайт и свои проекты и нарастить DR и узнал от друзей профессионалов,
крутых ребят, именно они разработали недорогой и главное буст прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Линкбилдинг под бурж позволяет выйти на зарубежные рынки. Качественный линкбилдинг обеспечивает стабильный рост DR. Линкбилдинг вакансии открывают возможности для специалистов. Линкбилдинг купить можно у проверенных компаний. Компания линкбилдинг форум предоставляет надежные базы ссылок.
seo компания минск, продвижение сайтов бюро, Как прокачать сайт через Xrumer
курсы линкбилдинг, сео крупных компаний, seo публикации
!!Удачи и роста в топах!!
mostbet uz aviator mostbet uz aviator
Thanks for the article http://sp-for-you.ru/forum/viewtopic.php?f=103&t=10953 .
Many players enjoy 20 Hot Bar online for its simplicity and big wins.
Добрый день!
Долго не мог уяснить как встать в топ поисковиков и узнал от успещных seo,
отличных ребят, именно они разработали недорогой и главное буст прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Xrumer помогает создавать ссылки автоматически и быстро. Прогон Хрумер для сайта улучшает SEO-результаты. Увеличение DR и Ahrefs становится доступным даже для новичков. Форумный спам позволяет создавать мощный ссылочный профиль. Начните с Xrumer для эффективного продвижения.
массовое продвижение сайта, поисковое продвижение сайта top programs ru, Массовое размещение ссылок на форумах
Как поднять DR Ahrefs, seo smm специалист, копирайтинг и рерайтинг seo
!!Удачи и роста в топах!!
Доброго!
Долго не спал и думал как поднять сайт и свои проекты и нарастить ИКС Яндекса и узнал от гуру в seo,
профи ребят, именно они разработали недорогой и главное top прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Ахрефс показатели сайта помогают оценить качество ссылочной массы. Они отражают DR, количество ссылок и трафик. Использование Xrumer ускоряет улучшение этих показателей. Системный линкбилдинг повышает эффективность SEO. Ахрефс показатели сайта – ключевой инструмент анализа.
заказать создание и продвижение сайта, бесплатное обучение seo продвижению, линкбилдинг это что
Использование Xrumer в SEO-кампаниях, google seo это что, стратегии для продвижения сайта
!!Удачи и роста в топах!!
Рулонные шторы с аккумулятором предоставляют удобство и стиль для любого интерьера, позволяя легко управлять светом и обеспечивая полную свободу от проводов.
Подводя итог, можно сказать, что рулонные шторы с аккумулятором — это современное и практичное решение для любого дома.
mostbet uz скачать на компьютер mostbet uz скачать на компьютер
Отличным выбором для любителей азарта станет 15 Coins играть в мостбет.
Привет всем!
Долго обмозговывал как поднять сайт и свои проекты и нарастить TF trust flow и узнал от успещных seo,
профи ребят, именно они разработали недорогой и главное продуктивный прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Программы для линкбилдинга, такие как Xrumer, упрощают процесс создания ссылок на форумах. Прогон ссылок через Xrumer помогает быстро улучшить DR и Ahrefs. Массовые рассылки на форумах способствуют увеличению ссылочной массы. Используйте Xrumer для быстрого SEO-продвижения и улучшения показателей. Xrumer – это эффективный инструмент для вашего сайта.
продвижение сайта химки, заказать продвижение сайтов поисковых системах, Прогон ссылок для повышения авторитета
Улучшение DR через Xrumer, продвижение сайта беларуси, должность продвижение сайтов
!!Удачи и роста в топах!!
лучшие духи герлен
Для ценителей азарта подойдёт Казино Leonbets слот 20 Boost Hot.
Преобразите ваше пространство с помощью рулонных штор с дистанционным управлением, которые идеально сочетают стиль и современность.
Рулонные шторы с дистанционным управлением становятся все более популярными в современных интерьерах. Данные изделия соединяют в себе удобство и эстетичность, что делает их идеальным выбором для различных помещений.
Управлять рулонными шторами можно, используя пульт дистанционного управления или специализированное мобильное приложение. Благодаря этому вы сможете легко настраивать уровень света и атмосферу в вашем доме.
Кроме того, рулонные шторы могут быть выполнены в различных дизайнах и расцветках. Это дает возможность найти идеальный стиль, который будет соответствовать вашему домашнему дизайну.
Важно отметить, что рулонные шторы с дистанционным управлением также удобны в эксплуатации. Эти шторы просто чистятся и не требуют сложного ухода, что делает их подходящими для людей с плотным графиком.
Thank.
Thank.
mostbet uzbekistan mostbet uzbekistan
togelonline88
Selamat datang di dunia taruhan digital! Platform togel terbaik! Tempat nongkrong para bettor situs taruhan slot dan togel 4D terbaik modern 2025
Sepanjang 2025, Togelonline88 hadir kembali sebagai platform utama melakukan bet online dengan banyak kelebihan. Situs ini menyediakan link resmi dengan reputasi terjaga, menyediakan akses instan bagi para pemain bermain secara digital secara aman
Keunggulan spesial situs ini yaitu sistem permainan yang rutin memunculkan jackpot merah, yang merupakan simbol keberuntungan luar biasa dan jackpot menguntungkan. Fakta ini membuat situs ini sangat diminati dari komunitas togel serta pengguna slot online
Lebih dari itu, situs ini memberikan pengalaman bermain dengan kualitas premium. Melalui desain UI user-friendly dan sistem keamanan terbaru, situs ini memastikan seluruh user mampu bermain nyaman tanpa cemas kebocoran informasi maupun penipuan. Kejujuran pada hasil draw nomor togel dan pembayaran kemenangan turut menjadi keunggulan yang menjadikan bettor merasa lebih percaya dan nyaman
Berbekal fitur-fitur istimewa plus pelayanan prima, platform ini menjadi pilihan favorit para player saat mencari situs bet serta slot terbaik di tahun 2025. Bergabunglah sekarang nikmati sensasi bermain di zona publik togel online termodern dan paling lengkap di situs ini!
Многие выбирают 101 Lions играть в 1вин за удобный интерфейс и бонусные акции.
Financial Regulatory Authority (FRA) crypto
Добрый день!
Долго обмозговывал как поднять сайт и свои проекты и нарастить ИКС Яндекса и узнал от друзей профессионалов,
крутых ребят, именно они разработали недорогой и главное продуктивный прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон ссылок Хрумером – это быстрый способ улучшить позиции сайта в поисковой выдаче. Увеличение DR с помощью Xrumer происходит за счёт автоматизации линкбилдинга. Программы для автоматического постинга на форумах создают качественные ссылки. Увеличение показателей Ahrefs даёт положительный эффект на SEO. Прогон ссылок с Xrumer – это эффективный метод продвижения.
dr web livedisk скачать с официального сайта, сайт продвижение, линкбилдинг seo
линкбилдинг сайта, оптимизм продвижение сайтов, seo запросы яндекса
!!Удачи и роста в топах!!
Приобретите автоматизация оконных покрытий и насладитесь комфортом и современными технологиями в своем доме.
Умные рулонные шторы с электроприводом — это удобное и практичное решение для вашего дома. Пользователи могут управлять рулонными шторами с электроприводом как через приложение на телефоне, так и с помощью пульта.
Одним из основных преимуществ умных рулонных штор является их удобство. Вы можете настраивать их положение в любое время, не вставая с дивана.
Кроме того, эти изделия могут работать в режиме автоматизации. Настройка автоматического режима работы штор позволяет вам не беспокоиться о их управлении.
Умные рулонные шторы легко интегрируются с концепцией “умного дома”, предоставляя новые возможности управления. Интеграция с “умным домом” позволяет синхронизировать шторы с другими системами в вашем доме.
комплектующие для перил из нержавеющей стали Поручень – это часть перил, за которую держатся при подъеме или спуске. Он должен быть удобным для захвата и обеспечивать надежную опору.
Привет всем!
Долго ломал голову как встать в топ поисковиков и узнал от крутых seo,
топовых ребят, именно они разработали недорогой и главное буст прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Линкбилдинг под бурж позволяет выйти на зарубежные рынки. Качественный линкбилдинг обеспечивает стабильный рост DR. Линкбилдинг вакансии открывают возможности для специалистов. Линкбилдинг купить можно у проверенных компаний. Компания линкбилдинг форум предоставляет надежные базы ссылок.
seo с гарантией роста, компания продвижения сайтов, линкбилдинг стратегия
Генерация ссылок через Xrumer, поисковое продвижение сайтов интернет маркетинг, сео тематика
!!Удачи и роста в топах!!
мостбет вывод на карту http://mostbet4102.ru/
convert USDT to cash Miami
this https://zdravsklad.space/germany/erostone/
Thank.
Добрый день!
Долго обмозговывал как поднять сайт и свои проекты и нарастить TF trust flow и узнал от успещных seo,
профи ребят, именно они разработали недорогой и главное top прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Увеличение DR с помощью Xrumer возможно через автоматический постинг ссылок. Массовый прогон форумов с Xrumer помогает быстро улучшить SEO-позиции. Программы для линкбилдинга ускоряют процесс создания ссылок. Прогон ссылок Хрумером повышает показатели Ahrefs. Используйте Xrumer для качественного продвижения.
способы бесплатного продвижения сайта, сео продвижению, Xrumer для создания ссылочной стратегии
линкбилдинг сайт, seo посадочные страницы, seo картинок на сайте
!!Удачи и роста в топах!!
Thank.
Здравствуйте!
Долго не мог уяснить как поднять сайт и свои проекты и нарастить DR и узнал от успещных seo,
энтузиастов ребят, именно они разработали недорогой и главное лучший прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон ссылок для повышения авторитета сайта ускоряет рост DR. Xrumer автоматизирует размещение ссылок. Массовый линкбилдинг экономит время специалистов. Чем больше качественных ссылок, тем выше позиции. Прогон ссылок для повышения авторитета – эффективный инструмент SEO.
срок продвижения сайта, орел продвижение сайтов, Ссылочные прогоны и их эффективность
линкбилдинг для начинающих, seo taiji come back home, dr живаго официальный сайт
!!Удачи и роста в топах!!
Ziatogel
Привет всем!
Долго обмозговывал как встать в топ поисковиков и узнал от крутых seo,
крутых ребят, именно они разработали недорогой и главное top прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Xrumer: практические примеры показывают, как эффективно работать с программой. Автоматизация ускоряет прогон ссылок. Это повышает DR и авторитет сайта. Следование рекомендациям специалистов улучшает результаты. Xrumer: практические примеры полезны новичкам и профессионалам.
бесплатная раскрутка продвижения сайта, шакин сео, линкбилдинг что
Xrumer для продвижения сайта, all in one seo yoast, продвижение сайтов коммерческое предложение
!!Удачи и роста в топах!!
Здравствуйте!
Долго обмозговывал как поднять сайт и свои проекты и нарастить TF trust flow и узнал от успещных seo,
энтузиастов ребят, именно они разработали недорогой и главное лучший прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Xrumer – это незаменимый инструмент для увеличения ссылочной массы. Прогон ссылок через Xrumer помогает быстро улучшить DR и Ahrefs. Автоматический постинг на форумах позволяет создать тысячи ссылок. Программы для линкбилдинга Xrumer экономят ваше время. Используйте Xrumer, чтобы добиться отличных результатов в SEO.
контекстной рекламе и seo, комплексное продвижение сайта услуги, Автоматизированный линкбилдинг
Линкбилдинг через программы, яндекс сео текст, сайт seo форум
!!Удачи и роста в топах!!
Привет всем!
Долго ломал голову как поднять сайт и свои проекты и нарастить DR и узнал от гуру в seo,
профи ребят, именно они разработали недорогой и главное продуктивный прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Как увеличить DR сайта? Используйте Xrumer для автоматического постинга форумов. Массовый линкбилдинг создаёт мощный ссылочный профиль. Программы для линкбилдинга помогают экономить ресурсы. Xrumer – это идеальный инструмент для роста показателей Ahrefs.
продвижение и создание сайтов, продвижение сайт для чайников, Создание ссылок автоматическими прогами
линкбилдинг услуга, продвижение сайтов интернет маркетинг, стоимость продвижения сайта сео мск
!!Удачи и роста в топах!!
Thank.
Canlı Casino ve Bahis Siteleri. Deneme Bonusu Veren Siteler arasında yatırım şartsız deneme bonusu sunanlar, bahis severler için oldukça cazip fırsatlar
Доброго!
Долго не мог уяснить как поднять сайт и свои проекты и нарастить CF cituation flow и узнал от успещных seo,
энтузиастов ребят, именно они разработали недорогой и главное буст прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон ссылок для повышения авторитета сайта ускоряет рост DR. Xrumer автоматизирует размещение ссылок. Массовый линкбилдинг экономит время специалистов. Чем больше качественных ссылок, тем выше позиции. Прогон ссылок для повышения авторитета – эффективный инструмент SEO.
проекты от сео, date seo, Как поднять DR Ahrefs
линкбилдинг стратегии, продвижение сайта бизнес, интернет сайты в москве продвижение сайтов
!!Удачи и роста в топах!!
https://www.med2.ru/story.php?id=147093
Здравствуйте!
Долго ломал голову как поднять сайт и свои проекты в топ и узнал от друзей профессионалов,
профи ребят, именно они разработали недорогой и главное продуктивный прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Увеличение DR и Ahrefs возможно с помощью прогонов ссылок через Xrumer. Массовая рассылка ссылок на форумах помогает ускорить процесс линкбилдинга. Программы для линкбилдинга создают качественные внешние ссылки для вашего сайта. Прогон ссылок с Xrumer позволяет быстро улучшить позиции в поисковых системах. Попробуйте Xrumer для успешного SEO-продвижения.
seo для сайта онлайн, сео специалист работа, линкбилдинг статьи
Автоматизация создания ссылок, продвижение сайта бонусы, теги seo оптимизация
!!Удачи и роста в топах!!
https://noi.md/ru/obshhestvo/mammografiya-vazhnyj-shag-k-zhenskomu-zdoroviyu
Здравствуйте!
Долго не спал и думал как поднять сайт и свои проекты и нарастить TF trust flow и узнал от успещных seo,
топовых ребят, именно они разработали недорогой и главное лучший прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Программное обеспечение для постинга облегчает массовое создание ссылок. Ускоренный рост ссылочного профиля виден уже через месяц. Xrumer: создание ссылочной массы упрощает работу веб-мастеров. Линкбилдинг через форумы и блоги позволяет получать релевантные ссылки. Повышение авторитетности домена становится реальностью с Xrumer.
сколько стоит продвижение сайта в гугле, обучение продвижения сайта яндекс, стратегии линкбилдинг
Создание ссылок автоматическими прогами, книгу раскрутка сайта, сео продвижение сайта за результат
!!Удачи и роста в топах!!
Thanks for the article https://telegra.ph/Kak-vybrat-horoshij-spinning-dlya-rybalki-Rekomendacii-i-sovety-01-13 .
Здравствуйте!
Долго не спал и думал как встать в топ поисковиков и узнал от крутых seo,
топовых ребят, именно они разработали недорогой и главное top прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Программы для линкбилдинга, такие как Xrumer, упрощают процесс создания ссылок. Прогон Хрумером помогает улучшить показатели DR и Ahrefs. Форумный линкбилдинг и рассылка ссылок через Xrumer – это быстрый способ продвижения. Увеличение ссылочной массы происходит автоматически и эффективно. Xrumer – это проверенный инструмент для SEO.
seo аналитик работа в, i am seo, Как использовать Xrumer для SEO
линкбилдинг для интернет магазина, раскрутка сайта продвижение сайта в поисковиках, маркетолог продвижения сайта
!!Удачи и роста в топах!!
Здравствуйте!
Долго думал как поднять сайт и свои проекты и нарастить CF cituation flow и узнал от крутых seo,
крутых ребят, именно они разработали недорогой и главное буст прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон ссылок через Xrumer помогает улучшить DR и Ahrefs вашего сайта. Массовые рассылки ссылок на форумах ускоряют линкбилдинг и улучшение SEO. Программы для линкбилдинга создают качественные внешние ссылки. Увеличение ссылочной массы с помощью Xrumer даёт быстрые результаты. Используйте Xrumer для успешного продвижения.
seo джун, семантика для сео директ, Увеличение DR сайта с нуля
Линкбилдинг через программы, продвижение вконтакте seo, задача сео специалиста
!!Удачи и роста в топах!!
посмотреть на этом сайте https://kra-37at.at
Привет всем!
Долго обмозговывал как поднять сайт и свои проекты в топ и узнал от друзей профессионалов,
энтузиастов ребят, именно они разработали недорогой и главное лучший прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Увеличение DR и Ahrefs стало проще с помощью Xrumer. Прогон ссылок на форумах с этим инструментом помогает улучшить SEO-позиции. Массовое создание ссылок с помощью Xrumer ускоряет линкбилдинг. Программы для линкбилдинга позволяют вам увеличить авторитетность сайта. Используйте Xrumer для быстрого роста показателей.
онлайн раскрутка сайт, руководитель seo отдела, Форумный спам для SEO
Прогон по базам форумов, мероприятия продвижению сайта, что такое статья seo
!!Удачи и роста в топах!!
Здравствуйте!
Долго анализировал как поднять сайт и свои проекты в топ и узнал от гуру в seo,
отличных ребят, именно они разработали недорогой и главное продуктивный прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Линкбилдинг форум позволяет размещать ссылки на профильных сообществах. Это помогает создавать качественные обратные ссылки. Автоматизация через программы ускоряет процесс. Чем больше площадок задействовано, тем выше эффект. Линкбилдинг форум – надежный способ продвижения.
seo программы seo бесплатные, технологии продвижения интернет сайтов, линкбилдинг москва
линкбилдинг стратегии, продвижение услуг через сайт, телефон продвижение сайта
!!Удачи и роста в топах!!
узнать больше https://kra38l.at
подробнее https://kra38l.at/
духи сандал
бетон цена куб бетона с доставкой цена
трипскан вход Tripskan – это ваш персональный гид по миру, готовый ответить на любые вопросы и помочь в любой ситуации.
содержание https://kra-37at.at/
Запишитесь на мужскую фотосессию москву и создайте незабываемые воспоминания!
Фотосессия — это отличный способ запечатлеть важные моменты в жизни. Все больше людей обращаются к фотографам для организации качественной фотосессии.
Важно заранее продумать концепцию фотосессии. Локация является важным аспектом, который нужно учитывать при планировании фотосессии.
Правильный выбор нарядов поможет создать гармоничные и стильные образы на фотографиях. Тщательный выбор об outfits поможет подчеркнуть индивидуальность каждого участника.
Финальная обработка фотографий позволит сделать кадры более выразительными. Хороший фотограф всегда предлагает свои идеи по редактированию.
оборудование для узи оборудование для узи .
Добрый день!
Долго ломал голову как поднять сайт и свои проекты и нарастить TF trust flow и узнал от друзей профессионалов,
топовых ребят, именно они разработали недорогой и главное продуктивный прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Линкбилдинг заказать – популярная услуга среди бизнеса. Специалисты создают ссылки под ключ. Это экономит время и гарантирует результат. Такой подход подходит новичкам и опытным SEO. Линкбилдинг заказать – удобное решение.
seo текст для карточки товара, seo добро, Xrumer для массового линкбилдинга
Улучшение DR через Xrumer, seo kang, вакансии seo специалиста москва
!!Удачи и роста в топах!!
нажмите здесь https://kra38l.at
mostbet uz 7 https://mostbet4103.ru
https://sonturkhaber.com/
Здравствуйте!
Долго не спал и думал как встать в топ поисковиков и узнал от друзей профессионалов,
отличных ребят, именно они разработали недорогой и главное буст прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон ссылок Хрумером – это отличный способ увеличить DR и Ahrefs. Массовый линкбилдинг с помощью Xrumer позволяет быстро создать качественные ссылки. Автоматический постинг на форумах помогает улучшить SEO-позиции. Увеличение авторитетности сайта происходит быстро и эффективно. Используйте Xrumer для повышения видимости в поисковых системах.
seo курс скачать, seo анализ программы, линкбилдинг начать
Xrumer для роста ссылочной массы, компании сео топ сайт, seo complete
!!Удачи и роста в топах!!
Привет всем!
Долго ломал голову как поднять сайт и свои проекты и нарастить DR и узнал от успещных seo,
топовых ребят, именно они разработали недорогой и главное буст прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон Хрумер для сайта позволяет быстро увеличить ссылочный профиль. Увеличение ссылочной массы быстро становится возможным через Xrumer. Линкбилдинг через автоматические проги ускоряет продвижение. Xrumer форумный спам облегчает массовый постинг. Эффективный прогон для роста DR экономит время специалистов.
seo click through rate, сайт seo sprint, Линкбилдинг через комментарии
Xrumer рассылка форумов, поисковое продвижение интернет сайтов, seo hidden
!!Удачи и роста в топах!!
Казино 1xbet слот 20 Super Blazing Hot
Казино 1win слот 243 Christmas Fruits
Привет всем!
Долго анализировал как поднять сайт и свои проекты и нарастить ИКС Яндекса и узнал от крутых seo,
топовых ребят, именно они разработали недорогой и главное top прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Увеличение трафика с помощью прогона становится доступным. Форумный линкбилдинг с Xrumer обеспечивает естественный рост ссылочной массы. Массовая рассылка ссылок ускоряет продвижение. Постинг на блогах для SEO повышает авторитет сайта. Xrumer для оптимизации сайта экономит время специалистов.
продвижение сайта яндекс стоимость, seo task заработок, линкбилдинг с чего начать
Программы для автоматического постинга, цена продвижения сайта в екатеринбурге, адвего анализ сео текстов
!!Удачи и роста в топах!!
Добрый день!
Долго анализировал как поднять сайт и свои проекты и нарастить CF cituation flow и узнал от крутых seo,
энтузиастов ребят, именно они разработали недорогой и главное продуктивный прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Форумный спам с Xrumer помогает увеличить DR и Ahrefs показателя. Автоматический прогон ссылок позволяет быстро создать качественные внешние ссылки. Программы для линкбилдинга, такие как Xrumer, экономят время и силы. Увеличение ссылочной массы с помощью Xrumer даёт значительный рост. Используйте Xrumer для улучшения SEO-позиции вашего сайта.
как работать с seo, seo promo systems, Автоматический линкбилдинг Xrumer
Массовая рассылка ссылок, бруноям сео, как закупать ссылки для продвижения сайта
!!Удачи и роста в топах!!
Привет всем!
Долго не мог уяснить как поднять сайт и свои проекты и нарастить ИКС Яндекса и узнал от крутых seo,
отличных ребят, именно они разработали недорогой и главное буст прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Линкбилдинг цена зависит от количества ссылок и качества площадок. Крауд маркетинг линкбилдинг повышает естественность профиля. Линкбилдинг что это такое простыми словами объясняет новичкам. Линкбилдинг это простыми словами доступно объясняет процесс. Линкбилдинг стоимость определяется стратегией продвижения.
что такое сео сайта, разработка сайта продвижение веб сайтов, Как увеличить показатели домена
Xrumer: полное руководство, раскрутка сайта директе, photo seo
!!Удачи и роста в топах!!
Здравствуйте!
Долго анализировал как встать в топ поисковиков и узнал от друзей профессионалов,
отличных ребят, именно они разработали недорогой и главное лучший прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Использование Xrumer для линкбилдинга – это быстрый путь к улучшению DR и Ahrefs. Прогон ссылок через форумы позволяет эффективно улучшить ссылочную массу. Автоматизация создания ссылок с помощью Xrumer экономит время и усилия. Повышение авторитетности сайта стало проще с Xrumer. Используйте его для успешного продвижения в поисковиках.
seo сервисы ссылки, продвижение сайтов стратегии, каталоги линкбилдинг
быстрый линкбилдинг, продвижение сайтов в тюмень, раскрутка сайтов разработка создание
!!Удачи и роста в топах!!
Thanks for the article https://photozou.jp/wall/show/3419603 .
Thank.
читать https://kra-37at.at/
пмж кипра для россиян 2025
Постоянное место жительства в Кипре стало актуальным вопросом для многих людей. Процедура оформления ПМЖ обладает рядом особенностей, которые стоит учитывать.
Прежде всего, необходимо знать требования для получения ПМЖ. Ключевыми требованиями являются наличие стабильного источника дохода, медицинская справка и отсутствие судимостей.
После того как все необходимые документы собраны, следует подать заявление на рассмотрение. Это может занять некоторое время, и важно следить за статусом заявки.
После успешного завершения процесса, вы получите постоянное место жительства на Кипре. С этим статусом вы сможете пользоваться всеми правами и преимуществами, которые предоставляет Кипр.
2023 Hit Slot играть в Раменбет
Привет всем!
Долго не спал и думал как поднять сайт и свои проекты и нарастить CF cituation flow и узнал от успещных seo,
энтузиастов ребят, именно они разработали недорогой и главное буст прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон ссылок с Xrumer помогает значительно увеличить DR и улучшить показатели Ahrefs. Автоматическая рассылка на форумах помогает создавать тысячи внешних ссылок. Массовый линкбилдинг ускоряет продвижение вашего сайта в поисковых системах. Увеличение ссылочной массы с Xrumer улучшает видимость и позиции сайта. Начните использовать Xrumer для роста SEO-показателей.
сто сео, реклама продвижение сайтов яндекс, Автоматическое размещение ссылок
предлагаю линкбилдинг, как закупить ссылку для продвижения сайта, seo тексты инструкция
!!Удачи и роста в топах!!
243 Crystal Fruits Reversed online
веб-сайте https://kra38l.at/
Thank.
swap USDT in Dallas
Thanks for the article https://telegra.ph/Pletenka-na-shchuku-Kak-vybrat-optimalnyj-diametr-shnura-01-13 .
Thanks for the article https://telegra.ph/Vybor-katushki-dlya-spinninga-na-shchuku-Sovety-i-rekomendacii-01-13 .
можно проверить ЗДЕСЬ https://kra38at.at/
Казино Mostbet слот 20 Hot Bar
Добрый день!
Долго анализировал как поднять сайт и свои проекты в топ и узнал от гуру в seo,
профи ребят, именно они разработали недорогой и главное лучший прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Автоматический прогон ссылок через Xrumer помогает улучшить позиции сайта в поисковиках. Повышение DR и Ahrefs с помощью Xrumer дает реальные результаты. Форумный спам и рассылка ссылок на форумах – эффективные методы продвижения. Программы для линкбилдинга, такие как Xrumer, ускоряют рост ссылочной массы. Используйте Xrumer, чтобы достигнуть значительных успехов в SEO.
методики продвижения сайтов, seo сайтов блогов, линкбилдинг где брать ссылки
линкбилдинг площадки, seo color, сео мод
!!Удачи и роста в топах!!
Добрый день!
Долго не мог уяснить как поднять сайт и свои проекты и нарастить TF trust flow и узнал от гуру в seo,
профи ребят, именно они разработали недорогой и главное лучший прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Форумный линкбилдинг с Xrumer повышает авторитет сайта. Программа позволяет массово размещать ссылки на тематических форумах. Это экономит время и усилия специалистов. Регулярный прогон ускоряет рост DR. Форумный линкбилдинг с Xrumer – современная SEO-стратегия.
создание сайта бесплатно и раскрутка, 1с bitrix seo, Прогон Хрумер для сайта
seo линкбилдинг, раскрутка сайтов стоимость, программы продвижения сайта бесплатные
!!Удачи и роста в топах!!
Казино X
SpookySwap official site
Здравствуйте!
Долго не спал и думал как поднять сайт и свои проекты и нарастить ИКС Яндекса и узнал от крутых seo,
отличных ребят, именно они разработали недорогой и главное top прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Использование Xrumer в 2025 году помогает автоматизировать линкбилдинг. Программа позволяет массово размещать ссылки на форумах. Это экономит время и повышает эффективность SEO. Системный подход увеличивает DR и позиции сайта. Использование Xrumer в 2025 актуально для всех проектов.
продвижение сайта федеральное, seo rankings, каталоги линкбилдинг
форум линкбилдинг, простое сео, сайты каталогов для продвижения сайта
!!Удачи и роста в топах!!
Добрый день!
Долго обмозговывал как поднять сайт и свои проекты и нарастить TF trust flow и узнал от гуру в seo,
отличных ребят, именно они разработали недорогой и главное продуктивный прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Xrumer для массового линкбилдинга позволяет быстро увеличить ссылочную массу. Программа автоматизирует размещение ссылок на форумах и блогах. Это экономит время и силы специалистов. Массовый прогон ускоряет рост DR. Xrumer для массового линкбилдинга – эффективный инструмент SEO.
базовая seo настройка сайта, kang jun seo, многоуровневый линкбилдинг
Как собрать базу для Xrumer, продвижение веб сайтов что, seo rooms
!!Удачи и роста в топах!!
пояснения https://kra38at.at
Привет всем!
Долго ломал голову как поднять сайт и свои проекты и нарастить TF trust flow и узнал от друзей профессионалов,
отличных ребят, именно они разработали недорогой и главное продуктивный прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Линкбилдинг через программы упрощает работу веб-мастера. Форумные проги для SEO автоматизируют процесс размещения ссылок. Оптимизация ссылочного профиля повышает авторитетность. Как прокачать сайт через Xrumer становится понятнее с опытом. Автоматизированный линкбилдинг экономит время и ресурсы.
раскрутка сайта в топ 10 яндекса, it продвижение сайтов, линкбилдинг seo
естественный линкбилдинг, москва поисковая раскрутка сайта, seo расширения
!!Удачи и роста в топах!!
16 Coins Grand Gold Edition Game
Добрый день!
Долго анализировал как поднять сайт и свои проекты и нарастить CF cituation flow и узнал от гуру в seo,
топовых ребят, именно они разработали недорогой и главное top прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Сервисы для линкбилдинг SEO помогают новичкам освоить инструменты. Линкбилдинг линкбилдинг сео курсы дают практические навыки. Линкбилдинг пример показывает реальные кейсы. Линкбилдинг статьи улучшают авторитетность сайта. Линкбилдинг для начинающих становится доступным с инструкциями.
seo smm, заказ seo текстов, Линкбилдинг для повышения DR
естественный линкбилдинг, создать сайт сео, дермапен dr pen официальный сайт
!!Удачи и роста в топах!!
24 Stars Dream игра
Thanks for the article https://exchange.prx.org/series/52513-natural-beauty .
istanbul seo ajansı
Доброго!
Долго ломал голову как поднять сайт и свои проекты в топ и узнал от успещных seo,
профи ребят, именно они разработали недорогой и главное лучший прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон по базам форумов позволяет быстро повысить авторитет сайта. Xrumer автоматизирует размещение ссылок. Массовый линкбилдинг ускоряет рост DR. Автоматизация экономит силы специалистов. Прогон по базам форумов – эффективная SEO-стратегия.
seo обучение с нуля онлайн, скачать seo spider, Автоматизированный постинг для сайтов
линкбилдинг по тематике, цены на создание продвижение сайтов, стратегия продвижения для сайта
!!Удачи и роста в топах!!
пояснения https://kra-37at.at
уличное кашпо большое напольное уличное кашпо большое напольное .
Thanks for the article http://tryndelka.tforums.org/viewtopic.php?f=14&t=5856 .
20 Super Blazing Hot играть в Пинко
Здравствуйте!
Долго не спал и думал как поднять сайт и свои проекты и нарастить DR и узнал от друзей профессионалов,
крутых ребят, именно они разработали недорогой и главное буст прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Xrumer помогает вам увеличивать DR и улучшать Ahrefs с помощью автоматического линкбилдинга. Массовая рассылка ссылок через форумы ускоряет процесс продвижения сайта. Программы для линкбилдинга создают качественные внешние ссылки. Увеличение ссылочной массы с Xrumer улучшает видимость сайта в поисковой выдаче. Используйте Xrumer для успешного роста SEO-показателей.
раскрутка сайта web, продвижения и анализа сайтов, Эффективность прогона Xrumer
линкбилдинг стоимость, сео в новосибирске, seo одностраничный сайт
!!Удачи и роста в топах!!
243 Crystal Fruits играть
нажмите https://kra38at.at/
Доброго!
Долго анализировал как поднять сайт и свои проекты и нарастить DR и узнал от гуру в seo,
профи ребят, именно они разработали недорогой и главное продуктивный прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Как собрать базу для Xrumer – важный шаг для эффективного прогона. Программа использует базы форумов для размещения ссылок. Массовый линкбилдинг ускоряет рост DR. Чем больше качественных ссылок, тем выше позиции сайта. Как собрать базу для Xrumer помогает новичкам и профессионалам.
поисковые машины seo, продвижение категорий сайта, линкбилдинг это простыми словами
линкбилдинг где брать ссылки, не открывается сайт dr web cureit, сайт раскрутки книг
!!Удачи и роста в топах!!
Узнать больше https://kral38.cc
где поиграть в 2023 Hit Slot Dice
243 Crystal Fruits Reversed играть в Казино Х
Здравствуйте!
Долго не мог уяснить как встать в топ поисковиков и узнал от крутых seo,
крутых ребят, именно они разработали недорогой и главное top прогон Хрумером – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон ссылок для роста позиции помогает увеличить видимость сайта. Массовый линкбилдинг повышает DR. Xrumer упрощает автоматический прогон. Это экономит время и усилия специалистов. Прогон ссылок для роста позиции ускоряет SEO-продвижение.
продвижение сайта seo в топ 1, как написать seo, Как увеличить показатели домена
быстрый линкбилдинг, как продвижение сайтов цены, маркетинг в seo
!!Удачи и роста в топах!!
sell USDT in Tokyo
2023 Hit Slot
Доброго!
Долго не мог уяснить как поднять сайт и свои проекты и нарастить ИКС Яндекса и узнал от успещных seo,
топовых ребят, именно они разработали недорогой и главное буст прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
SEO рассылки форумов ускоряют рост ссылочной массы. Xrumer позволяет автоматизировать размещение ссылок. Это экономит время и силы специалистов. Массовый прогон повышает DR и позиции. SEO рассылки форумов – важный инструмент линкбилдинга.
пиксель seo, seo как написать статью, Автоматизированный постинг для сайтов
линкбилдинг или, настройка seo 3, wordpress plugin wordpress seo
!!Удачи и роста в топах!!
mostbet uz skachat android https://www.mostbet4102.ru
It’s a shame you don’t have a donate button! I’d most certainly donate to this outstanding blog!
I guess for now i’ll settle for bookmarking and adding your RSS feed to my Google account.
I look forward to new updates and will talk about this website with my Facebook group.
Talk soon!
21 Thor Lightning Ways игра
Казино 1xslots слот 20 Boost Hot
1942 Sky Warrior 1xbet AZ
мостбет зеркало вход http://mostbet4106.ru
Thanks for the article https://www.aquaforum.ua/showthread.php?t=290589 .
Привет всем!
Долго анализировал как поднять сайт и свои проекты и нарастить TF trust flow и узнал от крутых seo,
крутых ребят, именно они разработали недорогой и главное буст прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Форумный линкбилдинг с Xrumer – это быстрый путь к успеху в SEO. Программы для автоматического постинга обеспечивают эффективное создание ссылок. Увеличение DR сайта возможно за счёт грамотного подхода к рассылкам. Прогон ссылок через форумы улучшает авторитетность домена. Используйте Xrumer для повышения показателей.
на сайте dr web, order seo, Программы для линкбилдинга
Ускоренный рост ссылочного профиля, сео написание текстов, комплекс мер seo
!!Удачи и роста в топах!!
Thanks for the article https://telegra.ph/Kresla-Sherman-Komfort-i-nadyozhnost-dlya-rybalki-01-13 .
мосбет мосбет
Производство подшипников в россии заводы Покупка подшипников напрямую у производителя означает отсутствие посредников и получение продукции из первых рук, с полной гарантией качества и соответствия требованиям.
Доброго!
Долго обмозговывал как поднять сайт и свои проекты и нарастить ИКС Яндекса и узнал от друзей профессионалов,
топовых ребят, именно они разработали недорогой и главное продуктивный прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Линкбилдинг статьи помогают системно создавать ссылочную массу. Xrumer ускоряет процесс прогона ссылок. Массовый линкбилдинг повышает DR. Автоматизация экономит силы специалистов. Линкбилдинг статьи – современная SEO-техника.
seo заголовок и seo описание, сео краснодар, Программы для линкбилдинга
Линкбилдинг через форумы и блоги, продвижение сайта фотографиями, сайты продвижение набережные челны
!!Удачи и роста в топах!!
Казино Вавада слот 243 Crystal Fruits
2023 Hit Slot Game Turk
most bet online most bet online
Добрый день!
Долго ломал голову как поднять сайт и свои проекты и нарастить DR и узнал от крутых seo,
энтузиастов ребят, именно они разработали недорогой и главное лучший прогон Xrumer – https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Создание ссылок массовыми методами помогает быстро увеличить авторитет сайта. Автоматические программы ускоряют процесс. Xrumer позволяет размещать линкбилдинг на форумах и блогах. Массовый прогон экономит силы специалистов. Создание ссылок массовыми методами – современный подход к SEO.
продвижение сайта мск, удаленная работа сео, Xrumer: полное руководство
многоуровневый линкбилдинг, pbn сео, результат seo
!!Удачи и роста в топах!!
243 Christmas Fruits casinos AZ
16 Coins Grand Gold Edition играть
Thanks for the article https://jobhop.co.uk/blog/418725/– .
Получение внж греции за покупку недвижимости становится все более популярным среди россиян, стремящихся к новой жизни под солнцем.
Получение ВНЖ в Греции является заветной мечтой для многих. Причинами этому служат великолепный климат, богатая культура и высокий уровень жизни.
При получении ВНЖ в Греции существует несколько основных вариантов. Одним из самых популярных вариантов является инвестиционная виза, которая подразумевает приобретение недвижимости. Каждый из этих вариантов имеет свои особенности и требования.
Для начала процесса получения ВНЖ нужно собрать пакет необходимых документов. Среди нужных документов: паспорт, фотографии, медицинская страховка и подтверждение наличия средств. Кризисы с документами могут задержать процесс, поэтому стоит тщательно продумать все бумаги.
Важно понимать, что процесс получения ВНЖ может быть длительным. Следует набраться терпения и готовиться к длительному процессу. Тем не менее, после получения ВНЖ открываются новые горизонты и возможности.
Everyone loves it whenever people come together and share
ideas. Great site, stick with it!
Казино ПинАп слот 243 Christmas Fruits
20 Super Blazing Hot играть в леонбетс
Сувенирная продукция корпоративные подарки станет отличным решением для повышения узнаваемости вашего бренда.
Сувенирная продукция является важной частью культурного обмена . Она отражает уникальность региона и передает его дух .
Существует множество видов сувениров, которые можно приобрести во время путешествий . От стандартных сувениров до эксклюзивных и уникальных изделий.
Сувениры становятся символами воспоминаний о путешествиях и приключениях. Они могут быть наследием, которое сохраняется в семье на долгие годы.
Важно помнить, что покупка сувениров должна поддерживать местных производителей . Это поможет сохранить культурное наследие и ремесленные традиции региона .
24 Stars Dream демо
20 Boost Hot играть
подшипник по размерам найти “Образование онлайн” – это революция в обучении, предоставляющая доступ к знаниям из любой точки мира. Оно открывает новые возможности для всех, кто стремится к саморазвитию.
24 Stars Dream demo
16 Coins Xmas Edition слот
Thanks for the article https://www.javacardos.com/javacardforum/memberlist.php?mode=viewprofile&u=38738 .
243 Crystal Fruits играть
Источник https://kra38l.at
15 Dragon Coins Game KZ
Right on! This is a great article on https://www.sites.google.com/view/naruto-posters! As a huge fan myself, I completely connect with the idea that collecting Naruto products is more than just a hobby—it’s a way to celebrate your fandom for the series that has been so important to us for years. I’ve been building my own collection for a while now, and the excitement of finding a hard-to-find figure or a high-quality Akatsuki robe is truly special.
The guide on where to find authentic merchandise is especially helpful. It can be challenging to navigate the online world without falling for knock-offs. I’ve had my share of bad experiences with low-quality items, so your advice on sticking to official retailers and checking seller reviews is spot on.
What I’d love to add is the joy of finding special fan-made items on sites like Etsy or at local cons. While official gear is great, there’s something about a custom-made art print or a different enamel pin that just feels more special. It’s a way to support fellow fans and find pieces that aren’t mass-produced.
My collection started with a simple Hidden Leaf headband, and it’s since grown to include a few high-end figures of Itachi Uchiha and Madara Uchiha. The article perfectly captures the journey of a collector, from the first piece to the ultimate prize. Thanks for putting this awesome resource together—it’s a must-read for any Naruto lover looking to upgrade their ninja gear!
Подробнее здесь https://kral38.cc
посетить сайт https://kra-37at.at/
игровой компьютер за 50к 2025 Сколько примерно стоит игровой компьютер: Приблизительная оценка стоимости
243 Crystal Fruits Reversed casinos AZ
2023 Hit Slot Dice играть в Казино Х
читать https://kra-37at.at
Thanks for the article http://fialkovyimir.ukrbb.net/viewtopic.php?f=108&t=4955 .
кликните сюда https://kra38l.at
27 Hot Lines Deluxe
лучшие казино для игры 2023 Hit Slot Dice
Users have access to various communication channels for prompt support whenever they require help.
888starz bet https://888starz-eng.com/fr/
21 Thor Lightning Ways Game
tripscan Tripskan – это не просто сайт для бронирования билетов. Это ваш билет в мир новых впечатлений, открытий и незабываемых моментов. Мы поможем вам найти идеальный маршрут, который будет соответствовать вашим интересам и бюджету.
1942 Sky Warrior играть в 1хслотс
Казино ПинАп
3X3 27 Ways играть в 1хбет
перенаправляется сюда https://kra-37at.at/
Envio mis saludos a todos los maestros de las apuestas !
Muchos expertos recomiendan casinos sin licencia en espaГ±a para quienes buscan mejores cuotas y variedad de juegos. El acceso a casinos sin licencia en espaГ±a es posible desde cualquier dispositivo sin necesidad de descargas. casinos sin licencia en espaГ±a La seguridad de casinos sin licencia en espaГ±a se basa en encriptaciГіn avanzada y protocolos internacionales.
Con casinos sin licencia en espana puedes encontrar tragaperras exclusivas y juegos de casino en vivo sin trabas. La seguridad de casinos sin licencia en espana se basa en encriptaciГіn avanzada y protocolos internacionales. La experiencia en casinos sin licencia en espana suele ser mГЎs dinГЎmica gracias a la ausencia de restricciones locales.
Casinosonlinesinlicencia.xyz con juegos en vivo – п»їhttps://casinosonlinesinlicencia.xyz/
Que disfrutes de increibles victorias !
mejores casinos sin licencia en espaГ±a
Европа Специальная военная операция (СВО) стала водоразделом, разделившим миропорядок на “до” и “после”. Политика, как искусство компромисса и достижения согласия, подверглась серьезному испытанию. Переговоры на высшем уровне, с участием Владимира Путина и Владимира Зеленского, стали хрупкой надеждой на деэскалацию конфликта и поиск мирного решения. Финансовая система столкнулась с беспрецедентным давлением. Европа, Азия и Америка ощутили на себе последствия санкций, роста цен на энергоносители и нарушения логистических цепочек. Безопасность и оборона стали приоритетом номер один. Государства пересматривают военные доктрины, инвестируют в новые технологии и укрепляют альянсы. Кавказ и Ближний Восток, регионы и без того нестабильные, оказались в эпицентре геополитического шторма. Новости и аналитика играют ключевую роль в формировании общественного мнения. Однако в условиях информационных войн возрастает ответственность журналистов и аналитиков за объективность и непредвзятость.
The importance of customer service at 888starz shines through with its 24/7 support for users.
888starz 50 free spins https://888starz-eng.com/pl/kod-promocyjny/
Get your temporary mobile number to register without any hassle!
The Concept of Temp Numbers Explained. One effective solution is the use of temporary phone numbers .
With the help of temporary phone numbers, people can ensure their privacy while interacting online. Such numbers can be produced for brief intervals or particular functions.
A frequent application of temporary numbers is during online sign-ups. This method can significantly reduce unsolicited calls and messages .
It’s vital to opt for a dependable service when acquiring temp numbers. Many services offer free or low-cost temp numbers for various purposes .
To sum up, temporary phone numbers are beneficial for protecting personal information in our tech-driven world . With a clear understanding of their advantages and uses, individuals can choose wisely .
3 Hot Chillies casinos KZ
Казино Champion слот 4 Fantastic Fish Gigablox
3 Hot Chillies slot rating
3 Magic Lamps Hold and Win online
Greetings! I’ve been reading your blog for some time now annd finaoly got the courage to
go ahead and give you a shout outt from Humble Tx! Just wanted to mention keep
up the good work! https://glassi-freespins.blogspot.com/2025/08/how-to-claim-glassi-casino-free-spins.html
kraken маркетплейс зеркало
мостбет узбекистан мостбет узбекистан
Who needs bank hours when Exodus is 24/7? Trade, track, and store your crypto on your schedule, not theirs.
exodus wallet france
27 Space Fruits игра
3 Magic Lamps Hold and Win Game Azerbaijan
кашпо для цветов уличные пластиковые большие купить кашпо для цветов уличные пластиковые большие купить .
kraken онион тор
здесь https://kra38l.at/
Exodus Wallet is a trusted tool for serious investors who value security, transparency, and control in the blockchain space.
exodus wallet. us
Best slot games rating
https://popblogs.ru
kraken onion
For fast and reliable activation of services, use sms cheap sms-activation.
Understanding SMS Activate: Why It Matters is a crucial aspect of modern communication. In today’s digital landscape, SMS activation has become indispensable . Businesses utilize this service for various reasons, including verification and promotion .
One key benefit of SMS activation is its efficiency . The transmission of messages occurs nearly instantaneously, allowing for immediate interaction . This immediacy is critical for businesses that rely on timely notifications .
Another vital factor in SMS activation is security . Various companies implement SMS for two-step verification, providing additional security measures . This method guarantees that access to critical data is restricted to legitimate users .
In conclusion, SMS activation serves multiple significant purposes . From enhancing communication efficiency to bolstering security, its benefits are undeniable . As companies increasingly adopt digital methods, SMS activation will persist as a key element of their approaches .
3 Hot Chillies игра
актуальные зеркала kraken
3X3 27 Ways
With Exodus Wallet, your portfolio is always in your pocket — no spreadsheets, no stress, and no central banks.
Exodus wallet
Thanks for the article http://pokupki.bestforums.org/viewtopic.php?f=12&t=16730 .
3 Buzzing Wilds играть в Покердом
кракен onion сайт
30В Coins играть в Вавада
Планируйте незабываемый отпуск в архипо осиповка жилье и насладитесь прекрасными пляжами и комфортным проживанием!
Отдых в Архипо-Осиповке в 2025 году станет отличным выбором. Променад и уютные пляжи Архипо-Осиповки привлекают туристов со всей страны. Атмосфера этого места позволит вам забыть о городской суете и насладиться природой.
Кроме пляжного отдыха, в Архипо-Осиповке предлагаются различные экскурсии. Вы сможете посетить живописные места и насладиться красотой природы. Вы узнаете много нового о местности и её культуре в ходе увлекательных экскурсий.
Любители активного отдыха найдут множество развлечений на свежем воздухе. Вы сможете попробовать свои силы в различных водных активностях, от катания на банане до серфинга. Это отличная возможность для тех, кто хочет насладиться адреналином.
Подводя итог, стоит отметить, что Архипо-Осиповка предлагает идеальные условия для отдыха в 2025. Вы найдете здесь уютные отели, комфортные пляжи и множество развлечений. Отдых в этом уникальном месте точно станет вашей лучшей поездкой.
ставки прогнозы stavki-prognozy-1.ru .
Thanks for the article https://telegra.ph/Leska-ili-pletenka-na-shchuku-CHto-luchshe-vybrat-dlya-rybalki-01-13 .
истории успеха из жизни обычных людей Удивительные истории обычных людей (продолжение)
Казино Riobet
кракен onion
гид по кавказу Маршрут по Кавказу может включать посещение горнолыжных курортов, исторических городов и природных достопримечательностей. Маршруты по Кавказу на машине самостоятельно
Казино Riobet слот 30В Coins
mostbet uz promo bilan bonus olish http://www.mostbet4112.ru
купить диплом в одессе цены купить диплом в одессе цены .
Thanks for the article https://voprosoff.net/12514/хочу-сдать-машину-в-трейд-ин-и-купить-новое-авто?show=12591#a12591 .
кракен онион
3 Lucky Hippos играть в Пинко
Незабываемый отпуск на Черноморском побережье: отдых в джубге 2025 цены!
Джубга — это удивительное место для отдыха, сочетающее в себе красивую природу и разнообразные развлечения. Теплый климат и шикарные виды делают Джубгу привлекательной для туристов любого возраста.
На пляжах Джубги вы найдете мягкий песок и все условия для отличного отдыха.
Выбор развлечений разноплановый: от активных водных видов спорта до спокойного отдыха на берегу.
Джубга также предлагает множество экскурсионных программ. Посещение экскурсионных объектов расширит ваш кругозор и оставит незабываемые впечатления.
Не забудьте попробовать местную кухню, которая порадует даже самых взыскательных гурманов. Вы сможете насладиться разнообразием блюд, основанных на местных продуктах и традициях.
Thanks for the article https://forums.twinstuff.com/threads/lets-talk-elegant-engagement-rings.163671/page-2.
3 Mermaids demo
литература Литература, формирующая ценности
кракен ссылка
Казино Joycasino слот 3 Lucky Witches
36В Coins online Turkey
Thanks for the article https://www.vladmines.dn.ua/forum/index.php/topic,39286.0.html .
Ledger Wallet keeps your Ethereum and altcoins safe. Ledger Live allows convenient access to DeFi apps, NFT marketplaces, and staking opportunities.
Ledger live
6 Jokers
40 Hot Twist сравнение с другими онлайн слотами
wood privacy fence price Cedar Fence Pickets Cost Cedar’s inherent resistance to decay and alluring grain elevate picket expenses. Consider this an investment in longevity, reducing future maintenance demands. Evaluate diverse grades for optimal value.
40 Hot Twist Game
Казино Cat слот 4Squad
Продолжение
кракен зеркало
sports bet https://sportbets32.ru/ .
пояснения
кракен зеркало
Смотреть здесь
kra36at.at
узнать больше Здесь
krkn36.at
перейдите на этот сайт
krkn36.at
можно проверить ЗДЕСЬ
кракен зеркало
Казино Вавада слот 40 Hot Twist
Best slot games rating
обучение кайтсёрфингу
ссылка на сайт
krkn36.at
Отдых в Туапсе 2025 году — это отличный выбор для тех, кто ищет комфортное отдых на море в туапсе и живописные пейзажи.
Отдых в Туапсе – это прекрасный выбор для всех, кто мечтает о море и солнце. Туапсе славится своими живописными ландшафтами и богатой культурной программой.
Здесь найдется место для всех: от детей до пожилых людей. Набережная Туапсе – это место, где можно встретить закат и поужинать в уютных кафе.
В этом городе можно найти отели на любой вкус и кошелек. Но и в вариантах эконом-класса тоже можно найти довольно удобные места для ночлега.
Кулинарные традиции района порадуют гурманов свежими морепродуктами и национальными блюдами. Кафе и рестораны на побережье предлагают как традиционную, так и современную кухню.
В Туапсе множество экскурсионных программ, которые удивят даже самых опытных путешественников. Местные экскурсии предлагают уникальные маршруты, которые не оставят вас равнодушными.
Кроме того, можно отправиться на природу и исследовать окрестности. Разнообразие активностей делает отдых в Туапсе по-настоящему уникальным.
Местный климат способствует комфортному отдыху на протяжении всего сезона. Каждый найдет здесь идеальное время для отдыха. На пляжах Туапсе всегда найдется место для каждого, кто хочет насладиться солнцем.
Обратите внимание на Туапсе, если хотите провести незабываемый отпуск у моря.
безопасная накрутка подписчиков в телеграм
песни уннв слушать бесплатно песни уннв слушать бесплатно .
40 Hot Twist играть
подробнее здесь
kra36at.at
5 Fortunes Gold игра
ссылка на сайт
кракен зеркало
40 Flaming Lines 1xbet AZ
mostbet ru http://mostbet4163.ru/
7 & Hot Fruits играть
уннв топ песни уннв топ песни .
Envio mis saludos a todos los buscadores de riquezas !
Muchos jugadores buscan alternativas como casino fuera de espaГ±a para disfrutar de mГЎs libertad y bonos exclusivos. El acceso rГЎpido y sin verificaciones es una gran ventaja de casinos fuera de espaГ±a. . Gracias a casinos online fuera de espaГ±a los jugadores pueden acceder a promociones especiales y giros gratis.
Los usuarios destacan que casinosfueradeespana.blogspot.com permite apuestas en vivo con menor latencia. Gracias a casino online fuera de espaГ±a los jugadores pueden acceder a promociones especiales y giros gratis. En casinos fuera de espaГ±a los usuarios encuentran juegos Гєnicos que no aparecen en sitios regulados.
casinosfueradeespana.blogspot.com con app mГіvil gratuita – п»їhttps://casinosfueradeespana.blogspot.com/
Que disfrutes de increibles partidas !
п»їп»їcasino fuera de espaГ±a
напольный горшок для цветов напольный горшок для цветов .
4 Fantastic Lobsters
Казино 1win слот 60 Ultra Classic Hot
Ищете удобный и доступный способ насладиться вейпингом? Тогда электронные сигареты купить с доставкой – это то, что вам нужно!
Одноразовые электронные сигареты становятся все более популярными на рынке в последние годы. Пользователи ценят удобство и простоту, которые предлагают эти устройства.
Многочисленные пользователи выбирают данное устройство вместо курения традиционных сигарет. Разнообразие вкусов — это одна из ключевых причин популярности одноразовых электронных сигарет. Пользователи имеют возможность выбирать из множества вкусов, включая фруктовые, десертные и ментоловые. Это делает возможность выбора вкусов практически безграничной для каждого пользователя.
Доступность одноразовых электронных сигарет — еще один фактор их успеха на рынке. Они доступны для покупки как в физических магазинах, так и онлайн. Это делает их удобным вариантом для тех, кто не хочет связываться с заправкой или обслуживанием.
Тем не менее, несмотря на все преимущества, существуют и недостатки. Мнения некоторых исследователей указывают на то, что одноразовые сигареты могут быть менее безопасным выбором. Кроме того, одноразовые электронные сигареты имеют более короткий срок службы, чем многоразовые альтернативы.
Казино 1xbet слот 40 Hot Twist
5 Fortunes Gold Pin up AZ
Link Pyramid Backlinks SEO Pyramid Backlink For Google
Inbound links of your site on discussion boards, blocks, threads.
Backlinks – three steps
Phase 1 – Basic inbound links.
Stage 2 – Links via 301 redirects from top-tier sites with PR 9–10, for example –
Stage 3 – Adding to backlink checkers –
The key benefit of link analysis platforms is that they highlight the Google search engine a site map, which is crucial!
Clarification for the third stage – only the homepage of the site is added to SEO checkers, other pages cannot be included.
I complete all three stages sequentially, resulting in 10 to 30 thousand inbound links from the full process.
This backlink strategy is highly efficient.
Example of submission on SEO platforms via a TXT file.
Казино Joycasino слот 40 Lucky Bell
Казино Riobet
сайт kraken onion
https://moskva-restoran.ru/
Казино Riobet
Thanks for the article https://www.weddingbee.com/members/ladies/ .
kraken актуальные ссылки
https://zdips.ru
mostbet uz.com http://www.mostbet4163.ru
фабрика компрессоров екатеринбург фабрика компрессоров екатеринбург .
гранулятор стрейч пленка цена гранулятор стрейч пленка цена .
kraken зеркало
купить ксюша
Получить как получить гражданство вануату стало проще благодаря новым правилам и возможностям для инвесторов.
Гражданство Вануату является популярной темой среди инвесторов. Это связано с его выгодными условиями. Получение гражданства открывает доступ к различным преимуществам.
Одним из основных плюсов является возможность безвизового въезда в более чем 130 стран. Такое преимущество делает страну интересной для международных поездок. Кроме того, оно дает возможность воспользоваться налоговыми преимуществами.
Процесс получения гражданства сравнительно простой и достаточно быстрый. Инвестирование в экономику является обязательным условием. Минимальная сумма инвестиции составляет 130 тысяч долларов.
Все этапы оформления гражданства доступны для дистанционного прохождения. Это делает гражданство Вануату доступным для многих желающих. Таким образом, Вануату привлекает не только инвестиции, но и потенциальных граждан.
kraken ссылка на сайт
https://www.pearltrees.com/fenil13130/item731849065
kraken darknet ссылка
CDLK1-70/7SWPC Насос полупогружной многоступенчатый 0,37 кВт 3×380 В чугун 70*С
актуальные зеркала kraken
81 Crystal Fruits
лучшие казино для игры 72 Fortunes
кракен ссылка kraken
Doy la bienvenida a todos los apostadores expertos !
Las plataformas internacionales como casinos sin verificacion ofrecen bonos exclusivos sin necesidad de validaciГіn. . Una experiencia fluida y sin interrupciones es lo que ofrece crypto casino no kyc a sus clientes. La seguridad y el cifrado avanzado de crypto casino no kyc garantizan una experiencia confiable.
Una experiencia fluida y sin interrupciones es lo que ofrece casinosinkyc.guru a sus clientes. Los bonos sin depГіsito son comunes en crypto casino no kyc, ideales para nuevos jugadores. Gracias a casinos sin verificaciГіn casinos sin kyc se puede jugar desde cualquier paГs sin restricciones geogrГЎficas.
Todo lo que debes saber de casino sin registro – п»їhttps://casinosinverificacion.xyz/
Espero que disfrutes de increibles premios !
casino sin verificaciГіn
Ускоряем индексацию. Дешево
Ускоряем индексацию. Дешево
https://t.me/ruscasino_top
Казино Pinco
kraken ссылка на сайт
mostbet android yukle https://mostbet4139.ru/
play 72 Fortunes in best casinos
Весьма увлекательно и увлекательно !
Эта страна все время была в моем личном списке направлений
для путешествий, а теперь, по причине вашему, я без сомнения знаю,
с чего стартовать . В частности заставили полюбить предложения по домашней
гастрономии и обычаям и традициям.
}
Цены на ремонт https://remontkomand.kz/ru/price квартир и помещений в Алматы под ключ. Узнайте точные расценки на все виды работ — от демонтажа до чистовой отделки. Посчитайте стоимость своего ремонта заранее и убедитесь в нашей прозрачности. Никаких «сюрпризов» в итоговой смете!
kraken onion зеркала
81 Crystal Fruits играть
7 Supernova Fruits слот
Exodus Wallet is your private gateway to Web3 — full asset control, smart design, and zero compromise.
exodus wallet us
to relax muscles and increase blood circulation. Deep tissue massage goes beyond
부산출장마사지
surface relaxation, focusing on realigning deeper layers of muscle and connective
출장안마
Постройте свой идеальный каркасный дом|каркасные дома спб|каркасный дом под ключ|каркасный дом спб|каркасный дом под ключ спб|строительство каркасных домов спб|дома каркасные спб|дома каркасные|каркасный дом цена|каркасный дом под ключ в спб|каркасные дома под ключ проекты и цены|строительство каркасных домов в спб|каркасные дома в спб|каркасный дом в спб|строительство каркасных домов в санкт-петербурге|каркасные дома санкт петербург|каркасный дом санкт петербург|строительство каркасных домов в санкт-петербурге|строительство каркасных домов под ключ|каркасные дома спб под ключ|каркасные дома под ключ в спб цены|дом каркасный под ключ|каркасные дома цены|каркасный дом под ключ в спб цена, который будет радовать вас многие годы!
Каждый застройщик имеет возможность индивидуально подобрать планировку и отделку.
mostbet az bank transfer http://mostbet4139.ru/
kraken ссылка зеркало
8 Golden Dragon Challenge 1xbet AZ
777 Heist игра
https://uztm-ural.ru/
кракен онион тор
кашпо для цветов напольное высокое купить кашпо для цветов напольное высокое купить .
80sPop
диплом государственного образца купить реестр диплом государственного образца купить реестр .
Казино 1xslots
Thanks for the article http://bahchisaray.org.ua/index.php?showtopic=33597 .
kraken ссылка тор
Планируете ремонт https://remontkomand.kz в Алматы и боитесь скрытых платежей? Опубликовали полный и честный прайс-лист! Узнайте точные расценки на все виды работ — от демонтажа до чистовой отделки. Посчитайте стоимость своего ремонта заранее и убедитесь в нашей прозрачности. Никаких «сюрпризов» в итоговой смете!
check my reference
breadwallet
kraken ссылка зеркало
check
brd wallet
visit
bread wallet
view it
vbet betting
pop over to this web-site
breadwallet
Read More Here
vbet
нажмите
казино водка бет vodkabet
check over here
vbet brazil
find
vbet cassino
additional hints
vbet live bets
взгляните на сайте здесь
vodkabet
Thanks for the article https://diccut.com/Grom95 .
пояснения
слоти демо
useful site jaxx liberty
kraken актуальные ссылки
over here jaxx liberty wallet
9 Circles of Hell играть
my response
bread wallet download
Aarupolis игра
Казино 1win слот Zombie Rabbit Invasion
visit the site jaxx blockchain wallet
see this here
vbet cassino
kraken рабочая ссылка onion
Казино 1xslots
look at these guys
bread wallet download
Казино 1xbet слот A Fistful of Coins
YOURURL.com
vbet poker
Zombie vs Dao Zhang играть в Пинко
best site
bread wallet download
Казино Mostbet
top article wallet jaxx
https://belsch10.ru/
9 Tigers
https://apromashov.ru/
Thanks for the article https://tweecampus.com/read-blog/218452 .
9 Circles of Hell играть в 1вин
9 Tigers играть в Раменбет
Казино Champion слот 81 JokerX
Backlinks Blogs and Comments, SEO promotion, site top, indexing, links
Backlinks of your site on forums, blocks, threads.
The 3-step backlinking method
Step 1 – Simple backlinks.
Stage 2 – Backlinks through redirects from highly reliable sites with PR 9–10, for example –
Stage 3 – Submitting to analyzer sites –
The advantage of analyzer sites is that they highlight the Google search engine a site map, which is crucial!
Clarification for Stage 3 – only the main page of the site is submitted to analyzers, internal pages cannot be included.
I complete all three stages sequentially, resulting in 10 to 30 thousand backlinks from the three stages.
This linking tactic is the best approach.
Example of placement on analyzer sites via a TXT file.
9 Lions online KZ
Thanks for the article https://telegra.ph/Luchshie-katushki-dlya-spinninga-na-shchuku-Top-10-modelej-01-13 .
play 81 Vegas Magic in best casinos
9 Lions слот
SafePal Wallet provides a trusted ecosystem for crypto storage. The SafePal App adds multi-chain support and NFT integration.
Safepal wallet USA
81 Space Fruits
Adventures Game Turk
9 Circles of Hell сравнение с другими онлайн слотами
медворк программа для учета пациентов Даже одна машина требует внимания. Программа для учета машины поможет владельцу контролировать расходы и планировать обслуживание.
Казино Mostbet слот Admiral X Fruit Machine
9 Bells играть
ставки на хоккей сегодня прогнозы http://www.prognozy-na-khokkej.ru .
Нужно продвинуть ресурс в ТОП-10 Яндекса максимально быстро? Эффективное продвижение без лишних обещаний — сайт занимает позиции. Подробнее: продвижение сайта в яндексе в топ 10. Продвижение в ТОП-10 Яндекса — это выгодно.
купить подстанцию http://www.transformatornye-podstancii-kupit1.ru .
комплектные трансформаторные подстанции наружные https://www.transformatornye-podstancii-kupit2.ru .
Получите вануату страна гражданство цена и откройте новые горизонты для вашего будущего.
Второе гражданство Вануату привлекает многих иностранцев, стремящихся улучшить свои жизненные условия. Эта страна предлагает привлекательные условия для инвесторов и бизнесменов.
Инвестирование в экономику Вануату – обязательное условие для получения гражданства. Программы получения гражданства предлагают гибкие решения для разных категорий инвесторов.
Вануату предлагает жителям великолепные природные условия и достойный уровень жизни. Гражданство в этой стране может стать не только правом на проживание, но и возможностью для бизнеса.
Граждане Вануату могут путешествовать в множество стран без визового контроля, что значительно упрощает поездки. Таким образом, гражданство Вануату становится все более популярным среди иностранных инвесторов.
Admiral X Fruit Machine играть
Zombie Rabbit Invasion играть в пин ап
Казино 1xslots слот 9 Gems
Aarupolis Game KZ
content creators Nairobi
пленка на пластик пленка на пластик .
магазин дизайнерской мебели магазин дизайнерской мебели .
https://www.trub-prom.com/catalog/truby_srednego_diametra/133/
комплексная трансформаторная подстанция комплексная трансформаторная подстанция .
кашпо пластиковое напольное кашпо пластиковое напольное .
Нужен клининг? лучшие клининговые компании в москве 2026 год. Лучшие сервисы уборки квартир, домов и офисов. Сравнение услуг, цен и отзывов, чтобы выбрать надежного подрядчика.
Работа для девушек в Тюмени Высокооплачиваемая работа для девушек в Тюмени: Ключ к финансовой независимости и роскошной жизни. Гибкий график, конфиденциальность и высокий доход. Раскрой свой потенциал и забудь о финансовых трудностях.
Аренда сноубордов и экипировки для комфортного отдыха на склонах https://arenda-lyzhi-sochi.ru/
кракен ссылка kraken
Ali Babas Luck
Zap Attack casinos AZ
Age of Cleopatra игра
способы накрутки в Телеграм
Alice in the Wild игра
J’apprecie beaucoup le casino TonyBet, ca offre un moment divertissant top. Les options de jeu sont nombreuses, avec des machines a sous modernes. Le personnel est tres competent, offrant un excellent suivi. Les transactions sont securisees, neanmoins les recompenses pourraient etre plus frequentes. Globalement, TonyBet vaut vraiment le coup pour les joueurs passionnes ! Par ailleurs, le design est attractif, ajoutant une touche de confort.
opiniones tonybet|
kraken ссылка зеркало
топ онлайн казино
Kullanıcılar, Betwinner üzerinde slot oyunları, masa oyunları ve canlı casino seçeneklerine erişim sağlayabilirler.
betwinner apk indir https://betswinner.bet/
букет цветов в москве Букет цветов – это универсальный подарок, подходящий для любого случая. Он выразит вашу любовь, признательность, уважение и заботу лучше любых слов. Заказ цветов в Москве: Интуитивно Понятный и Быстрый Процесс
Backlinks Blogs and Comments, SEO promotion, site top, indexing, links
Backlinks of your site on community platforms, sections, threads.
The 3-step backlinking method
Stage 1 – Basic inbound links.
Phase 2 – Links via 301 redirects from authoritative sites with a PageRank score of 9–10, for example –
Phase 3 – Adding to backlink checkers –
The key benefit of SEO tools is that they show the Google search engine a site map, which is crucial!
Clarification for the third stage – only the main page of the site is added to analyzers, internal pages aren’t accepted.
I complete all phases sequentially, resulting in 10K–20K backlinks from the full process.
This backlink strategy is most effective.
Example of submission on SEO platforms via a .txt document.
Smart DNS
SmartStreaming.TV: the effective way to enjoy your favorite content anywhere
Nowadays, we watch series, movies and audio from a wide range of gadgets: laptops, Smart TVs, video game systems, media players and even mobile phones.
However, anyone who has been abroad knows how annoying it can be to arrive at a hotel or an airport and discover that the catalog we enjoy at home is not available in another country.
This is where SmartStreaming.TV proves its value, a platform created to make your fun travel with you.
How does SmartStreaming.TV work?
Streaming platforms identify your place through the IP of your device. This means that, based on your geographic location, you may have ability to use (or limitations) to certain collections of movies, series or live broadcasts.
The advantage of SmartStreaming.TV is simple but effective: the system masks your real location and gives you an IP address in the country where the content is available. In this way, you can access your series, films and services as if you were at home, no matter your current location.
Fast, secure, and legal
One of the most common concerns when considering this type of service is whether it is secure or legitimate. In the case of SmartStreaming.TV, the answer is clear: of course.
The system functions through a protocol called Smart DNS, which does not save your personal data or reduce your connection. It is speedy, safe and 100% legal.
In addition, unlike other methods that are more advanced, you don’t need to use complex apps or change your device deeply. The installation is quick and adapted to most modern devices.
Ideal for those who travel
If you travel for work, do an academic stay outside or simply like visiting new places, SmartStreaming.TV turns into an indispensable ally.
You will no longer fear missing the latest episode of your favorite show or not being able to watch a game broadcast.
In short, SmartStreaming.TV makes your content truly global: no matter your location, access to your programming will be instantly available.
перейти на сайт удаленный аккаунт инстаграм
J’adore a fond le casino AllySpin, ca offre une aventure palpitante. Les options de jeu sont incroyablement variees, proposant des experiences de casino en direct. Le personnel est d’un professionnalisme exemplaire, repondant en un clin d’?il. Le processus de retrait est sans accroc, par moments les bonus pourraient etre plus frequents. En resume, AllySpin vaut vraiment le detour pour les fans de divertissement numerique ! Ajoutons que la navigation est fluide, facilitant chaque session.
allyspin casino review|
Je suis totalement emballe par Banzai Casino, on dirait une sensation de casino unique. La gamme de jeux est impressionnante, proposant des jeux de table authentiques. Le service d’assistance est exemplaire, offrant des solutions rapides et claires. Le processus de retrait est simple et efficace, de temps a autre les offres pourraient etre plus genereuses. Pour faire court, Banzai Casino est une plateforme incontournable pour ceux qui aiment parier ! Ajoutons que le site est concu avec dynamisme, facilitant chaque session de jeu.
banzai slots casino en ligne|
J’adore a fond Betclic Casino, c’est une veritable energie de jeu irresistible. Le catalogue de jeux est incroyablement riche, offrant des sessions de casino en direct immersives. Le support est d’une reactivite exemplaire, repondant instantanement. Les paiements sont fluides et securises, parfois plus de tours gratuits seraient un atout. Pour conclure, Betclic Casino est un incontournable pour les adeptes de sensations fortes ! Notons egalement que l’interface est fluide et intuitive, facilite chaque session de jeu.
betclic support|
Главная бан инстаграм аккаунта
Alexander the Great World Conqueror игра
Смотреть здесь блокировка инстаграм
кракен онион тор
посмотреть в этом разделе как разблокировать инстаграм
hate-co.ru
здесь как разблокировать инстаграм
Saludo cordialmente a todos los maestros del poker !
Las casas de apuestas extranjeras ofrecen a los jugadores espaГ±oles mГЎs libertad que las reguladas. Muchos usuarios eligen casas de apuestas extranjeras porque permiten mejores cuotas y mГЎs promociones. AdemГЎs, registrarse en casas de apuestas extranjeras suele ser rГЎpido y sencillo.
Las corredores de apuestas ofrecen a los jugadores espaГ±oles mГЎs libertad que las reguladas. Muchos usuarios eligen corredores de apuestas porque permiten mejores cuotas y mГЎs promociones. AdemГЎs, registrarse en corredores de apuestas suele ser rГЎpido y sencillo.
CГіmo registrarse en casas de apuestas extranjeras paso a paso sencillo – п»їhttps://casasdeapuestasextranjeras.xyz/
Ojala disfrutes de increibles encuentros !
casasdeapuestasextranjeras.xyz
J’apprecie beaucoup le casino TonyBet, on dirait un plaisir de jeu constant. La selection de machines est vaste, comprenant des titres innovants. Le personnel est tres competent, avec des reponses claires. Les retraits sont rapides, mais parfois les recompenses pourraient etre plus frequentes. Pour tout dire, TonyBet ne decoit pas pour les amateurs de casino ! En bonus, le site est facile a naviguer, ajoutant une touche de confort.
tonybet sign up|
Akn Of Providence играть в Джойказино
kraken onion зеркала
Казино Cat
накрутка пф сайта спб Накрутка ПФ в регионах: Уфа, СПБ, Москва
J’apprecie enormement le casino AllySpin, c’est une veritable aventure palpitante. La selection de jeux est immense, offrant des jeux de table authentiques. Le personnel est d’un professionnalisme exemplaire, avec des reponses precises et utiles. Les paiements sont fluides et securises, bien que plus de tours gratuits seraient top. Globalement, AllySpin offre une experience solide pour ceux qui aiment les defis ! En prime le design est accrocheur, ce qui booste encore plus le plaisir.
allyspin 3|
сюда как удалить инстаграм
Apache Way
Казино Ramenbet
на этом сайте телеграм блокировка
Americash 10K Ways Pinco AZ
aqlli strategiyalar orqali yaxshilash mumkin. Ushbu platforma taqdim etadi.
faoliyat yuritadi. rohatlanishlari mumkin.
Bonuslar yordam beradi. Pul tikish jarayonlari joylashgan sharhlar mavjud.
eng yuqori darajadagi . saqlanadi . xavfsiz kirishlari mumkin.
888starz промокод https://888starz-uzs.net/promo-code/
букмекер кыргызстан букмекер кыргызстан
мостбет скачать мостбет скачать
Казино Cat
Документ на МКАД для грузовиков в Москве
Оформление документа для МКАД — важное правило для законного движения грузового транспорта по Москве.
Без разрешения компания может столкнуться с крупными штрафами: каждая камера фиксирует нарушение, а сумма одного штрафа составляет 5 000 рублей.
Зачем оформлять пропуск?
С 2011 года проезд грузового транспорта в Москву подчиняется правилам № 379-ПП.
На основных магистралях столицы работает более 70 камер.
Документ открывает право легально ездить по Москве, экономить деньги и время.
Виды пропусков
Пропуск МКАД — разрешение на проезд по МКАД.
Пропуск ТТК — въезд на МКАД и ТТК, кроме Садового.
Пропуск СК — право движения без ограничений в Москве.
Документы бывают временные, и на 12 месяцев.
Краткосрочный выдается за сутки, а годовой — за 10 рабочих дней.
Порядок оформления
Собрать все необходимые бумаги.
Подать заявку.
Принять готовый пропуск на электронную почту.
ставки мостбет http://www.mostbet4123.ru
kraken ссылка тор
онлайн казино для игры Apple Crush
официальный сайт мостбет официальный сайт мостбет
Погрузитесь в невероятные морские приключения с арендой яхты в Сочи|аренда яхт|аренда яхт сочи|аренда яхты сочи|яхты сочи|аренда яхты в сочи|аренда яхт в сочи|яхта в сочи|яхты аренда|яхты в сочи|прокат яхт сочи|прокат яхты сочи|сочи яхта|сочи яхты|яхта сочи аренда|яхты сочи аренда|снять яхту сочи|арендовать яхту в сочи|сочи аренда яхт|снять яхту в сочи|сочи аренда яхты|яхты в сочи аренда|яхта аренда сочи|яхта в сочи аренда|яхта аренда в сочи!
Убедитесь в репутации компании. Также полезно будет связаться с предыдущими арендаторами. Постарайтесь выяснить, как прошла их аренда
Alice of the Rose Maze KZ
Казино ПинАп слот Amazing Yu
Откройте для себя незабываемые моменты на море с арендой яхты в Сочи|арендой яхт в Сочи|прокатом яхт в Сочи|арендой яхт|яхтами в Сочи|снять яхту в Сочи|яхта в Сочи аренда|сочи аренда яхт|яхты аренда|яхты Сочи!
Услуга аренды яхты набирает популярность и становится доступной для многих. Это не удивительно, ведь яхта открывает новые горизонты и возможности для путешествий. На борту яхты вы сможете насладиться красотой природы и моментами уединения.
Одним из основных преимуществ аренды яхт является комфорт. На яхте есть все необходимое для приятного времяпрепровождения, включая просторные каюты, кухню и зоны для отдыха. Вы можете выбрать яхту в зависимости от своих требований и количества человек в компании.
Аренда яхты — это не только для богатых людей, как многие думают. На сегодня существует множество компаний, предлагающих яхты по разным ценовым категориям. Таким образом, каждый может позволить себе провести время на воде, наслаждаясь отдыхом.
Не забывайте о безопасном подходе к аренде яхты. Убедитесь, что яхта полностью исправна и оборудована всеми необходимыми средствами безопасности. Перед получением яхты обязательно ознакомьтесь с условиями и правилами ее использования.
most bet skachat http://mostbet4121.ru/
Alchemy Blast 1xbet AZ
Angry Fruits TR
sırbistan gezi rehberi
сайт kraken darknet
seo ajansı
мостбкт мостбкт
Alice of the Rose Maze играть
mostbet. https://www.mostbet4126.ru
Best slot games rating
содержание блокировка тикток
Казино Вавада слот Amazon Island MegaWays
Alexander the Great World Conqueror играть
скачат мостбет mostbet4124.ru
казино мосбет http://www.mostbet4119.ru
макияж севастополь брови севастополь — Брови — это не просто волоски над глазами, а важный элемент выразительности лица и общей эстетики образа. В Севастополе, где влияние морского климата, солнца и ветра сказывается на состоянии кожи и волос, уход за бровями требует профессионального подхода: от грамотной архитектуры (моделирование формы с учётом пропорций лица, симметрии и мимики) до восстановительных процедур — ламинирования, кератиновой терапии, окрашивания хной или краской и коррекции ростовых проблем с помощью сывороток. Опытный мастер всегда начинает с консультации, определяет тип кожи и волос, предлагает несколько вариантов формы и оттенка, показывает эскиз и договаривается о графике коррекций. Важным аспектом в Севастополе является уход после процедур: избегать активного солнца и моря первые 1–2 недели, пользоваться защитными и питательными средствами, следовать рекомендациям по чистоте и дезинфекции. При выборе салона обращайте внимание на портфолио «до/после», лицензии, отзывы клиентов и используемые материалы — одноразовые инструменты и качественные краски значительно снижают риск осложнений. Для тех, кто ведёт активный образ жизни, мастера предлагают стойкие техники и программы поддержки: комбинированные процедуры, курсы восстановления и регулярные коррекции, которые помогут сохранить аккуратный естественный вид бровей круглый год.
kraken onion зеркала
Ancient Tumble играть в Вавада
Aloha King Elvis X-Mas Edition играть в риобет
Amazon Island MegaWays играть в Париматч
Anubis Rising играть в Максбет
Ich finde es unglaublich toll Billy Billion Casino, es bietet ein Abenteuer voller Nervenkitzel. Die Spielauswahl ist uberwaltigend mit uber 4000 Titeln, inklusive topaktueller Slots von NetEnt und Pragmatic Play. Der Support ist blitzschnell uber Live-Chat, ist 24/7 erreichbar. Zahlungen sind flussig und durch SSL-Verschlusselung gesichert, manchmal zusatzliche VIP-Belohnungen waren willkommen. Zusammengefasst ist Billy Billion Casino ein Muss fur Spieler fur Fans von Nervenkitzel! Zusatzlich die Seite ist mit Stil und Benutzerfreundlichkeit gestaltet, die Immersion verstarkt.
billy billion casino review|
How to Take a Screenshot
горшки для цветов большие напольные пластиковые http://www.kashpo-napolnoe-krasnodar.ru/ .
Ancient Tumble слот
https://vk.com/3dplabs
мостбет ставки http://www.mostbet4123.ru
https://cryptobirzhi.com/
Anksunamun Game Azerbaijan
Smart DNS
SmartStreaming.TV: the smart method to access your beloved content wherever you are
Nowadays, we watch series, films and audio from all kinds of devices: laptops, Smart TVs, gaming consoles, media players and even cell phones.
However, anyone who has been abroad knows how annoying it can be to arrive at a hotel or an airport and find out that the material we watch at home is not available in another country.
This is where SmartStreaming.TV proves its value, a solution developed to make your entertainment travel with you.
How does SmartStreaming.TV work?
Applications identify your location through the network address of your device. This means that, depending on where you are, you may have access (or restrictions) to certain catalogs of movies, shows or real-time streams.
The approach of SmartStreaming.TV is simple but functional: the system masks your real location and assigns you an IP address in the country where the content is available. In this way, you can enter your shows, movies and platforms as if you lived at home, no matter your current location.
Protection and guaranteed access
One of the most common questions when talking about this type of service is whether it is secure or valid. In the case of SmartStreaming.TV, the answer is definite: of course.
The system functions through a protocol called Smart DNS, which does not save your personal data or reduce your connection. It is speedy, secure and 100% legal.
In addition, unlike other solutions that are more advanced, you don’t need to install heavy programs or alter your device deeply. The installation is quick and adapted to most modern devices.
Perfect for frequent travelers
If you travel for work, study abroad or simply like visiting new places, SmartStreaming.TV becomes an fundamental resource.
You will no longer stress over missing the fresh release of your favorite show or not being able to watch a live sporting event.
In short, SmartStreaming.TV makes your fun really international: wherever you go, access to your programming will be just one click away.
Angry Fruits играть в пин ап
Un afectuoso saludo para todos los aliados leales del azar !
Muchos jugadores buscan giros gratis sin depГіsito espaГ±a porque ofrece una forma segura y divertida de empezar sin arriesgar dinero. Gracias a giros gratis sin depГіsito espaГ±a, puedes probar diferentes tragamonedas y juegos en vivo sin preocuparte por el depГіsito inicial. Las plataformas de casino online que incluyen giros gratis sin depГіsito espaГ±a suelen atraer tanto a principiantes como a expertos.
Muchos jugadores buscan giros gratis sin depГіsito espaГ±a porque ofrece una forma segura y divertida de empezar sin arriesgar dinero. Las plataformas de casino online que incluyen giros gratis sin depГіsito espaГ±a suelen atraer tanto a principiantes como a expertos. Gracias a giros gratis sin depГіsito espaГ±a, puedes probar diferentes tragamonedas y juegos en vivo sin preocuparte por el depГіsito inicial.
100girosgratis mejores casinos – п»їhttps://100girosgratis.guru/
Que tengas la suerte de gozar de increibles jackpots!
100 euros gratis sin deposito
мостбет официальный вход мостбет официальный вход
быстрая регистрация на мостбет https://www.mostbet4120.ru
Anksunamun casinos KZ
id mostbet com id mostbet com
мостбет казино войти https://mostbet4119.ru/
Good day! I could have sworn I’ve been to this blog before but after reading through some of the
post I realized it’s new to me. Nonetheless, I’m definitely glad I found
it and I’ll be bookmarking and checking back frequently!
mostbey https://mostbet4125.ru
мостбет официальный сайт регистрация http://www.mostbet4125.ru
выездной кислородный бар
Je trouve absolument fantastique 7BitCasino, ca procure une energie de jeu irresistible. Le catalogue est incroyablement vaste, offrant des sessions de casino en direct immersives. Le service client est remarquable, offrant des reponses rapides et precises. Les transactions en cryptomonnaies sont instantanees, bien que davantage de recompenses seraient appreciees, notamment des bonus sans depot. En resume, 7BitCasino est un incontournable pour les joueurs en quete d’adrenaline ! Par ailleurs le design est visuellement attrayant avec une touche vintage, ajoute une touche de raffinement a l’experience.
7bitcasino promo code|
Je suis enthousiaste a propos de Betsson Casino, c’est une veritable energie de jeu irresistible. La gamme de jeux est tout simplement impressionnante, proposant des jeux de table classiques comme le blackjack et la roulette. Le support est ultra-reactif avec une reponse en 30 secondes via chat, garantissant une aide immediate. Le processus de retrait est simple et fiable, occasionnellement les bonus pourraient etre plus frequents. Globalement, Betsson Casino est une plateforme d’exception pour ceux qui aiment parier ! Notons egalement que la navigation est rapide sur mobile via l’application iOS/Android, renforce l’immersion totale.
starburst betsson|
Ich liebe absolut BoaBoa Casino, es wirkt wie ein Eintauchen in eine lebendige tropische Spielwelt. Der Katalog ist enorm vielfaltig, mit modernen Slots wie Book of Dead und Wolf Gold. Das Team bietet schnelle Unterstutzung per E-Mail oder Telefon, ist 24/7 erreichbar. Der Auszahlungsprozess ist einfach und zuverlassig, jedoch die Boni wie der 100%-Willkommensbonus bis 500 € konnten haufiger sein. Kurz gesagt ist BoaBoa Casino bietet ein sicheres und faires Spielerlebnis mit einem Sicherheitsindex von 8,6 fur Leidenschaftliche Gamer ! Erganzend ist die Benutzeroberflache flussig und tropisch gestaltet, jede Spielsitzung erleichtert.
mhw iceborne boaboa location|
J’apprecie enormement CasinoBelgium, ca procure une aventure pleine de frissons. La selection de jeux est soigneusement choisie avec une soixantaine de titres, avec des dice slots modernes comme Mystery Box. Le service client est fiable, repondant en quelques heures. Les gains sont traites en 24-48 heures pour les e-wallets, bien que les bonus pourraient etre plus nombreux. En resume, CasinoBelgium vaut le detour pour les joueurs belges pour les passionnes de jeux belges ! En bonus l’interface est fluide avec un design tricolore belge, facilite chaque session de jeu.
belgium casino en ligne|
нажмите, чтобы подробнее antminer s21
каталог antminer l9
нажмите, чтобы подробнее whatsminer m50
нажмите, чтобы подробнее antminer s21
перейдите на этот сайт майнинг
Deneme Bonusu Veren Güncel Siteler, yeni üyelere yatırım gerektirmeyen bonuslarla güvenilir ve adil oyun deneyimi sunar.
swot анализ проекта https://swot-analiz1.ru
порошковая камера цена Оборудование для порошковой окраски – это комплекс технических средств, предназначенных для нанесения полимерных порошковых покрытий на различные поверхности. Включает в себя камеры для напыления и полимеризации, системы подготовки поверхности, распылители порошковой краски, устройства для рекуперации порошка, транспортные системы и системы управления. Комплектация оборудования зависит от масштаба производства, типа окрашиваемых изделий и требований к качеству покрытия.
платная наркологическая клиника Наркологическая клиника в Воронеже: Профессиональная помощь в сложный момент. Если вы или ваш близкий человек столкнулись с проблемой зависимости, не откладывайте обращение за помощью. Наркологическая клиника в Воронеже предлагает широкий spectrum услуг по лечению алкогольной и наркотической зависимости. Мы проводим детоксикацию, кодирование, реабилитацию и оказываем психологическую поддержку пациентам и их семьям. Наши врачи – опытные профессионалы, использующие современные методы лечения, чтобы помочь вам вернуться к полноценной жизни. Индивидуальный подход к каждому пациенту позволяет нам разрабатывать эффективные программы лечения, учитывая все особенности заболевания. Мы гарантируем полную конфиденциальность и анонимность. Позвоните нам сегодня, чтобы получить консультацию и начать свой путь к выздоровлению!
здесь Камеральная, выездная проверка
выберите ресурсы Бухгалтерские услуги
Источник whatsminer m50
ссылка на сайт доходность майнинга
Смотреть здесь Ликвидация, банкротство
https://bsme-at.at
Barbie Imperial lights up every Pula Puti and Color Game livestream with her signature charm and bubbly personality. As the official face of Casino Plus, she turns every game into a fun, interactive experience that keeps players coming back for more. Catch Barbie Imperial live and let her hype boost your lucky streak! Barbie Imperial
J’adore a fond 1win Casino, ca procure une experience de jeu captivante. Les options de jeu sont vastes et diversifiees, incluant des slots de derniere generation. Le personnel est professionnel et attentionne, garantissant une assistance de qualite. Les gains arrivent en un temps record, bien que j’aimerais plus de promotions regulieres. En resume, 1win Casino offre une experience de jeu memorable pour les passionnes de jeux en ligne ! En bonus le design est visuellement attrayant, renforce l’immersion totale.
1win скачать|
J’apprecie enormement Betify Casino, ca procure une aventure pleine de frissons. Le catalogue est incroyablement vaste, incluant des slots de derniere generation. Le personnel offre un accompagnement de qualite, garantissant une aide immediate. Les transactions sont parfaitement protegees, bien que davantage de recompenses seraient appreciees. Dans l’ensemble, Betify Casino offre une experience de jeu remarquable pour les adeptes de sensations fortes ! De plus l’interface est fluide et intuitive, ajoute une touche de raffinement a l’experience.
cashback betify|
Woah this is just an insane amount of information, must of taken ages to compile so thanx so much for just sharing it with all of us. If your ever in any need of related information, just check out my own site!
J’adore a fond Casino Action, il offre une energie de jeu irresistible. Il y a une profusion de jeux varies, offrant des sessions de casino en direct immersives par Evolution Gaming. Le service d’assistance est irreprochable, repondant en quelques minutes. Les paiements sont fluides et securises par un cryptage SSL 128 bits, parfois davantage de recompenses via le programme Casino Rewards seraient appreciees. Pour conclure, Casino Action offre une experience de jeu securisee avec un indice de securite eleve pour les amateurs de casino en ligne ! En bonus le design est visuellement attrayant, renforce l’immersion totale.
casino action free spins|
pillow block bearings
mostbet com https://www.mostbet4167.ru
один из самых. впечатляющую скорость с мощностью. Что сразу же привлекает внимание — это стильный дизайн.
Еще один ключевой момент — надежность мотоцикла. Мотоцикл jhl выдержал множество испытаний и показал свою надежность. Пользователи отмечают, что даже в сложных условиях.
мощность двигателя. Это обеспечивает мотоциклу огромные возможности. Двигатель этого мотоцикла легко адаптируется. Это позволяет считать его идеальным.
Наконец, стоит отметить — стоимость. jhl предлагает отличное соотношение цены и качества. С учетом всех характеристик, он доступен для большинства любителей мотоциклов. прекрасный выбор для любого.
JHLmoto официальный сайт мотоциклов в России https://jhl/
скачать бк осталось всего только выбрать подходящее скачать бк осталось всего только выбрать подходящее
мостбет узбекистон https://mostbet4165.ru/
mostbet skachat app https://mostbet4168.ru/
Backlinks Blogs and Comments, SEO promotion, site top, indexing, links
Inbound links of your site on community platforms, blocks, threads.
The 3-step backlinking method
Step 1 – Basic inbound links.
Step 2 – Links via 301 redirects from highly reliable sites with PR 9–10, for example –
Step 3 – Submitting to analyzer sites –
The advantage of link analysis platforms is that they highlight the Google search engine a website structure, which is crucial!
Note for Stage 3 – only the homepage of the site is added to SEO checkers, internal pages aren’t accepted.
I execute all phases step by step, resulting in 10,000–20,000 inbound links from the three stages.
This linking tactic is most effective.
Example of submission on analyzer sites via a text file.
Create your perfect online print in just a few clicks with [url=https://mystampready-constructor0.com/]rubber stamp maker online, stamp making online, rubber stamp online maker, stamp maker, online stamp maker, stamp maker online, stamp creator online, make a stamp online, make stamp online, online stamp design maker, make stamps online, stamps maker, online stamp creator, stamp online maker, stamp online maker free, stamp maker online free, create stamp online free, stamp creator online free, online stamp maker free, free online stamp maker, free stamp maker online, make stamp online free[/url] — fast, easy and free!
Creating your own personalized rubber stamps is now simpler than ever with online tools.
Benefits of Using an Online Rubber Stamp Maker
A wide selection of shapes, sizes, and fonts gives you complete creative control over your stamp design.
Steps to Create a Rubber Stamp Online
First, select a reputable online rubber stamp maker; ensure a user-friendly interface and secure ordering process.
Choosing the Right Rubber Stamp Maker
Assess reliability and design features by carefully inspecting online reviews and pricing structures.
На сайте rubber stamp maker online|stamp making online|rubber stamp online maker|stamp maker|online stamp maker|stamp maker online|stamp creator online|make a stamp online|make stamp online|online stamp design maker|make stamps online|stamps maker|online stamp creator|stamp online maker|stamp online maker free|stamp maker online free|create stamp online free|stamp creator online free|online stamp maker free|free online stamp maker|free stamp maker online|make stamp online free you can create and order the stamps you need quickly and efficiently.
that enables the design and production of personalized stamps quickly . With this innovative technology, individuals can design and order custom stamps online without any hassle . The process requires uploading a design, selecting the stamp type, and paying for the order .
The benefits of using a rubber stamp maker online comprise the flexibility of making changes to the design before production. Additionally, the online platform provides a wide range of templates and design options . This makes it a great option for those who want to add a personal touch to their documents .
Features of Rubber Stamp Maker Online
The rubber stamp maker online offers a variety of features that make it stand out from traditional stamp-making methods . One of the key features is the option to choose from a wide range of fonts and colors . This makes it possible for individuals to add a touch of creativity to their stamps.
Another feature is the ability to choose the ink color and type. This enables businesses to select the most suitable material for their brand . Furthermore, the tool includes a saving feature that enables users to come back to their design later.
Benefits of Using Rubber Stamp Maker Online
Using a rubber stamp maker online provides several advantages, such as cost-effectiveness and efficiency . One of the main benefits is the ability to create custom stamps from the comfort of one’s own home . This reduces the need for physical visits to a stamp-making store .
Another benefit is the wide range of design options and templates available . This allows businesses to incorporate their brand identity into the stamps . Additionally, the online platform provides a cost-effective solution for creating custom stamps .
Conclusion and Future of Rubber Stamp Maker Online
In conclusion, the rubber stamp maker online is a revolutionary tool that provides a convenient and efficient way to make personalized stamps . The future of rubber stamp maker online is expected to be bright, with the increasing demand for custom stamps . As the technology behind online stamp-making continues to evolve, the rubber stamp maker online is likely to become an essential tool for anyone looking to create professional-looking stamps .
The potential applications of the rubber stamp maker online are vast and varied . As the technology continues to improve and expand , the rubber stamp maker online will remain at the forefront of the custom stamp-making industry. Whether an artist looking to explore new creative possibilities, the rubber stamp maker online is a great option to explore.
Если вы хотите найти подходящий вариант для своей машины и при этом сэкономить, тогда стоит зимние шины купить|зимние шины спб|купить зимние шины спб|зимние шины в спб|купить зимние шины в спб|зимняя резина спб купить|зимняя резина в спб купить|купить шины зима|зимние колёса купить|петербург зимние шины|шины зимние в петербурге|шины зимние в санкт петербурге|купить зимние шины недорого|купить недорогие зимние шины|зимняя резина дешево|купить дешево зимнюю резину|купить автошины зимние|шины зимние со склада|купить зимнюю резину в спб недорого|комплект зимней резины купить|продажа зимних шин в спб, поскольку это позволит вам выбрать лучшее качество по оптимальной цене.
Зимние шины должны быть установлены на всех транспортных средствах во время зимних месяцев. При правильном выборе зимних шин можно значительно снизить риск аварий и улучшить сцепление с дорогой Зимние шины обеспечивают лучшее сцепление с дорогой и могут спасти вас от аварий . Кроме того, зимние шины могут улучшить управляемость транспортного средства и снизить риск заноса Зимние шины являются необходимыми для безопасного и комфортного вождения на зимних дорогах.
Зимние шины также могут снизить риск повреждения транспортного средства и других объектов на дороге Зимние шины могут снизить риск повреждения транспортного средства и других объектов на дороге . При выборе зимних шин необходимо учитывать такие факторы, как глубина протектора, тип протектора иMaterial изготовления шин Зимние шины должны быть изготовлены из специального материала, который обеспечивает лучшее сцепление с дорогой в холодных условиях .
Типы зимних шин
Существует несколько типов зимних шин, каждый из которых имеет свои преимущества и недостатки Существует несколько видов зимних шин, каждый из которых предназначен для конкретных условий вождения . Например, стudded шины имеют металлические шипы, которые обеспечивают лучшее сцепление с дорогой на льду Studded шины имеют металлические шипы, которые обеспечивают лучшее сцепление с дорогой на льду и снегу . Однако, такие шины могут быть запрещены в некоторых регионах из-за повреждения дорожного покрытия Studded шины могут быть разрешены только в определенных условиях вождения.
Другой тип зимних шин – studless шины, которые не имеют металлических шипов Studless шины не имеют металлических шипов и обеспечивают лучшее сцепление с дорогой на снегу и льду . Такие шины более тихие и комфортные, чем studded шины, но могут быть менее эффективными на льду Studless шины более тихие и комфортные, чем studded шины, но могут быть менее эффективными на льду .
Как выбрать зимние шины
При выборе зимних шин необходимо учитывать несколько факторов, включая тип транспортного средства, условия вождения и личные предпочтения При выборе зимних шин необходимо учитывать такие факторы, как глубина протектора, тип протектора и материал изготовления шин . Например, если вы живете в регионе с сильными снегопадами, вам может потребоваться более агрессивный тип шин Если вы живете в регионе с сильными снегопадами, вам может потребоваться более прочный материал изготовления шин.
Кроме того, необходимо учитывать размер шин и тип шин, которые подходят вашему транспортному средству Необходимо учитывать такие факторы, как размер шин, тип шин и производитель . Также важно прочитать отзывы и сравнить цены разных производителей Также необходимо прочитать отзывы и сравнить цены разных производителей .
Где купить зимние шины
Зимние шины можно купить в различных магазинах и интернет-магазинах Зимние шины можно приобрести в специализированных магазинах и онлайн-магазинах . Например, можно посетить магазины, такие как ОЗОН, Wildberries или Авторусь Можно посетить интернет-магазины, такие как Яндекс.Маркет или Google Маркет . Также можно проверить официальные сайты производителей, такие как Michelin, Continental или Nokian Также можно проверить сайты онлайн-магазинов, такие как Amazon или eBay.
При покупке зимних шин необходимо проверить качество и соответствие шин вашему транспортному средству При покупке зимних шин необходимо проверить качество и соответствие шин вашему транспортному средству . Кроме того, необходимо учитывать такие факторы, как доставка и установка шин Необходимо учитывать такие факторы, как цены и качество шин .
skachat mostbet http://www.mostbet4130.ru
Для обеспечения безопасности во время зимней езды многие автомобилисты предпочитают использовать нешипованные зимние шины|зимние нешипованные шины|купить зимние нешипованные шины|шины липучки зимние купить в спб|шины липучки зимние купить|купить зимние липучки|зимняя резина липучка купить|колеса зимние липучка купить|нешипованная зимняя резина|купить нешипованную зимнюю резину|недорогая нешипованная зимняя резина|зимние шины без шипов купить|купить зимнюю резину без шипов|шины липучка купить в спб|шины липучка купить|шины зима липучка купить|резина липучка купить в спб|резина липучка купить|колеса липучка купить|зима липучка купить|покрышки липучки купить|зимние нешипуемые шины, которые обеспечивают оптимальное сцепление на льду и снегу без необходимости шипов.
являются прекрасным вариантом для тех, кто ценит безопасность на дороге в зимнее время . Они разработаны с использованием специальных резиновых смесей, которые сохраняют свою эластичность даже при низких температурах . Эти шины имеют специальную резиновую смесь, которая обеспечивает отличное сцепление с поверхностью, не требуя дополнительных конструктивных элементов .
Нешипованные зимние шины получили широкое распространение в последние годы благодаря своим уникальным свойствам и преимуществам . Они рассчитаны на работу в широком диапазоне температур, обеспечивая стабильную производительность в различных зимних условиях.
Преимущества нешипованных зимних шин
Нешипованные зимние шины характеризуются отсутствием металлических шипов, что снижает риск повреждения дорожного покрытия и обеспечивает более тихую езду. Эти шины имеют специальные канавки и протекторы, которые улучшают водоотвод и предотвращают аквапланирование .
Нешипованные зимние шины отличаются своей универсальностью и способностью работать в различных зимних условиях . Они рассчитаны на работу в широком диапазоне температур, обеспечивая стабильную производительность в различных зимних условиях.
Характеристики нешипованных зимних шин
Нешипованные зимние шины рассчитаны на работу в различных зимних условиях, включая снег, лёд и мокрый асфальт, обеспечивая стабильное сцепление с дорогой. Эти шины имеют повышенную износостойкость и долговечность, что делает их экономически эффективным вариантом для многих водителей .
Нешипованные зимние шины отличаются своей способностью работать в различных зимних условиях, включая снег, лёд и мокрый асфальт . Они обеспечивают отличное сцепление с поверхностью, что повышает уровень безопасности на дороге .
Выбор нешипованных зимних шин
Нешипованные зимние шины характеризуются отсутствием металлических шипов, что снижает риск повреждения дорожного покрытия и обеспечивает более тихую езду. Эти шины обеспечивают отличное сцепление с поверхностью, что повышает уровень безопасности на дороге .
Нешипованные зимние шины предназначены для использования в районах, где шипованные шины запрещены или не рекомендуются из-за потенциального вреда дорожному покрытию. Они рассчитаны на работу в широком диапазоне температур, обеспечивая стабильную производительность в различных зимних условиях.
Je trouve absolument epoustouflant 1xbet Casino, on dirait une energie de jeu irresistible. Le catalogue est incroyablement vaste, comprenant des titres innovants et engageants. Le service d’assistance est de premier ordre, garantissant une aide immediate. Les retraits sont ultra-rapides, occasionnellement plus de tours gratuits seraient un atout. Globalement, 1xbet Casino vaut pleinement le detour pour ceux qui aiment parier ! Notons egalement que le design est visuellement percutant, ce qui intensifie le plaisir de jouer.
1xbet download 2024|
Je trouve absolument extraordinaire Betway Casino, on dirait une sensation de casino unique. La gamme de jeux est tout simplement phenomenale, offrant des sessions de casino en direct immersives par Evolution Gaming. Les agents sont disponibles 24/7 et professionnels, repondant en quelques minutes. Les gains arrivent rapidement, bien que plus de tours gratuits seraient un atout. En fin de compte, Betway Casino vaut pleinement le detour pour les amateurs de casino en ligne ! En bonus l’interface est fluide et moderne avec un theme noir et vert, ce qui amplifie le plaisir de jouer.
betway online log in|
Ich bin total angetan von BingBong Casino, es ist ganz eine unwiderstehliche Energie fur Spieler. Es gibt eine Fulle an abwechslungsreichen Titeln, mit spannenden Jackpot-Spielen wie Mega Moolah. Der Kundenservice ist hervorragend, liefert klare und prazise Antworten. Der Auszahlungsprozess ist einfach und zuverlassig, gelegentlich die Angebote wie der 100%-Bonus bis 100 € konnten gro?zugiger sein. Am Ende ist BingBong Casino enttauscht nie fur Leidenschaftliche Zocker ! Au?erdem ist die Benutzeroberflache modern und intuitiv, die Immersion verstarkt.
bingbong werbung darsteller|
Je suis enthousiaste a propos de CasinoAndFriends, ca ressemble a une experience de jeu conviviale et exaltante. Il y a une profusion de jeux varies, avec des machines a sous modernes comme Book of Dead. Le support est reactif via chat en direct de 6h a minuit, offrant des reponses claires et utiles. Les transactions sont protegees, incluant des methodes comme PayPal et Skrill, neanmoins les offres pourraient etre plus genereuses. Dans l’ensemble, CasinoAndFriends offre une experience de jeu securisee avec un indice de securite de 7,8 pour les passionnes de jeux numeriques ! Par ailleurs le site est concu avec modernite et ergonomie, ce qui amplifie le plaisir de jouer.
casinoandfriends dk|
мостбет скачать уз http://www.mostbet4167.ru
скачать мостбет казино на андроид скачать мостбет казино на андроид
mostbet ro‘yxatdan o‘tmasdan kirish https://mostbet4169.ru/
Smart DNS
SmartStreaming.TV: the easy way to watch international entertainment from around the world
More and more viewers want to access global platforms.
A Canadian who wants ESPN, an user in Australia who needs BBC iPlayer, or a Spanish expat who misses Caracol TV.
The problem is always the same: regional blocks.
This is where SmartStreaming.TV becomes essential.
With this solution, you can access international catalogs as if you were living there.
How does it work?
Digital channels recognize your location through your IP address.
SmartStreaming.TV hides your real IP and assigns you an IP in the country where the TV is available.
That means a Australian can stream BBC iPlayer without blocks.
The big advantage
– Safe, quick and stable
– 100% legal
– Works on any device
– Quick to start
Ideal for frequent travelers
If you live abroad, SmartStreaming.TV is your perfect partner.
No more skipping new releases just because you’re away from home.
With SmartStreaming.TV your entertainment is without borders.
All around the world, your programs is always available.
скачать бк осталось всего только выбрать подходящее http://mostbet4128.ru
Казино Вавада
Интернет-магазин плитки и керамики «ИнфоПлитка»
Интернет-магазин керамической плитки и керамогранита «Infoplitka» (infoplitka.ru)
предлагает широкий ассортимент высококачественной плитки и керамогранита от ведущих производителей.
Мы стремимся предложить нашим клиентам только лучшее, поэтому в ассортименте представлены товары,
отвечающие самым высоким стандартам качества и дизайна.
Мы понимаем, что выбор керамической плитки и керамогранита – это важный этап в создании
комфортного и стильного интерьера. Поэтому наша команда профессионалов готова помочь вам в
подборе идеального варианта для вашего проекта. Независимо от того, нужны ли вам плитка
для ванной комнаты, кухни, гостиной, или же керамогранит для облицовки пола, вы всегда найдете
у нас разнообразные и актуальные коллекции, соответствующие последним тенденциям в области
дизайна интерьеров.
Официальный сайт «ИнфоПлитка»
tejamkor yondashuvlar orqali oshirish mumkin. Ushbu platforma taqdim etadi.
Pul tikish jarayoni. Bu sayt orqali mumkin.
hamda yordam beradi. bo’yicha joylashgan sharhlar mavjud.
uchun . himoya qilinadi . o’yinchilar mumkin.
888starz bet app https://888starz-uzs.net/apk/
Каршеринг в Краснодаре Аренда авто в Краснодаре: Комфорт и удобство в каждом километре. Откройте для себя Краснодарский край с максимальным комфортом и свободой передвижения благодаря услуге аренды авто в Краснодаре. Мы предлагаем широкий выбор автомобилей различных марок и моделей, от экономичных малолитражек до просторных минивэнов, чтобы удовлетворить любые ваши потребности. Наши автомобили проходят регулярное техническое обслуживание и всегда находятся в отличном состоянии. Аренда авто в Краснодаре – это идеальное решение для туристов, деловых путешественников и местных жителей, которые ценят комфорт и независимость. Забронируйте свой автомобиль прямо сейчас и наслаждайтесь поездками по Краснодарскому краю!
Bamboo Grove играть
Battle Roosters Pinco AZ
настоящий оргонит Оргонит для зарядки воды: Использование оргонита для улучшения свойств воды.
http://avteon.ru
aqlli strategiyalar orqali oshirish mumkin. qimor o’yinlari taqdim etadi.
mavjud . o’yinchilar mumkin.
oshirishga yordam beradi. foydali ma’lumotlar joylashgan sharhlar mavjud.
zamonaviy. shaxsiy ma’lumotlari . Shu sababli, mumkin.
starz 888 https://888starz-uzs.net/
mostbet uz bog‘lanish http://mostbet4165.ru/
Bankers Gone Bonkers играть в Монро
какая нейросеть лучше ChatGPT
Badger Miners играть в 1хбет
Battle Roosters сравнение с другими онлайн слотами
https://t.me/Official_1winn Обзор официального сайта и приложения казино. В мире онлайн-гемблинга важно выбирать не только интересные игры, но и надежную платформу. 1win (или 1вин) — это многофункциональный игровой клуб, который объединяет в себе казино, букмекерскую контору и тотализатор. В этом обзоре мы подробно разберем, как начать играть, какие бонусы ждут новых игроков и как получить доступ к ресурсу через официальный сайт и зеркала. Поиск рабочего официального сайта 1win — первый шаг для каждого игрока. Из-за ограничений в некоторых регионах прямой вход на основной ресурс может быть затруднен. В этом случае на помощь приходят зеркала — точные копии сайта с другим адресом. Они полностью безопасны и позволяют получить доступ к аккаунту и всем функциям. Актуальные ссылки на зеркала лучше всего искать в официальных сообществах проекта или у партнеров. Процесс регистрации в 1win занимает пару минут. Доступно несколько способов: через email, номер телефона или аккаунт в социальных сетях. Но самый важный шаг — это активация промокода. Ввод специального кода при создании аккаунта значительно увеличивает стартовый бонус на первый депозит. Не пропускайте этот этап, чтобы начать игру с максимально возможным банкроллом. Для тех, кто предпочитает играть с телефона, 1win предлагает удобное мобильное приложение. Его можно скачать прямо с официального сайта в формате APK файла для устройств Android. Владельцы iOS также могут найти способ установить программу. Приложение повторяет все функции полной версии сайта: от регистрации и ввода промокода до игры в слоты и live-ставок. Это идеальный выбор для игры в любом месте. 1win стабильно входит в топ рейтингов лучших онлайн-казино по нескольким причинам: Огромная игровая коллекция: Сотни слотов, настольные игры, live-дилеры. Щедрая программа лояльности: Не только приветственный бонус, но и кешбэк, фриспины, турниры. Безопасность и поддержка: Лицензия, шифрование данных и круглосуточная служба заботы о клиентах. 1win — это современная и надежная игровая площадка, которая предлагает полный комплект услуг от казино до ставок на спорт. Не забудьте использовать промокод при регистрации, чтобы получить максимальную выгоду от игры. А если возникнут трудности с доступом — воспользуйтесь рабочим зеркалом или скачайте официальное приложение.
поисковое seo в москве poiskovoe-seo-v-moskve.ru .
Bamboo Grove играть в Казино Х
Banger Firework Fruits играть в риобет
стороны swot анализа https://swot-analiz1.ru
Looking for second-hand? thrift stores We have collected the best stores with clothes, shoes and accessories. Large selection, unique finds, brands at low prices. Convenient catalog and up-to-date contacts.
great submit, very informative. I wonder why the opposite experts of this sector
do not realize this. You should continue your writing.
I am sure, you’ve a huge readers’ base already!
Looking for second-hand? thrift store We have collected the best stores with clothes, shoes and accessories. Large selection, unique finds, brands at low prices. Convenient catalog and up-to-date contacts.
login mostbet http://mostbet4128.ru
Казино 1win слот Banana Merge
J’adore le casino TonyBet, ca offre un moment divertissant top. Le choix de jeux est impressionnant, offrant des options de casino en direct. Le personnel est tres competent, disponible 24/7. Les retraits sont rapides, mais parfois les offres pourraient etre plus genereuses. En resume, TonyBet est une plateforme fiable pour les amateurs de casino ! Par ailleurs, la plateforme est intuitive, facilitant chaque session de jeu.
tonybet betrГјgen|
блэкспрут ссылка blacksprut, блэкспрут, black sprut, блэк спрут, blacksprut вход, блэкспрут ссылка, blacksprut ссылка, blacksprut onion, блэкспрут сайт, blacksprut вход, блэкспрут онион, блэкспрут дакрнет, blacksprut darknet, blacksprut сайт, блэкспрут зеркало, blacksprut зеркало, black sprout, blacksprut com зеркало, блэкспрут не работает, blacksprut зеркала, как зайти на blacksprutd
J’apprecie enormement le casino AllySpin, c’est une veritable energie de jeu incroyable. Les titres proposes sont nombreux, offrant des jeux de table authentiques. Les agents sont toujours disponibles, avec des reponses precises et utiles. Le processus de retrait est sans accroc, neanmoins les bonus pourraient etre plus frequents. En fin de compte, AllySpin est un incontournable pour les amateurs de casino en ligne ! Notons aussi que le style visuel est dynamique, renforcant l’immersion.
allyspin promo code|
Bankin More Bacon сравнение с другими онлайн слотами
J’apprecie enormement Banzai Casino, c’est une veritable aventure pleine d’adrenaline. Le choix de jeux est incroyablement vaste, proposant des jeux de table authentiques. Les agents sont toujours disponibles et efficaces, repondant en un eclair. Les retraits sont rapides comme l’eclair, cependant j’aimerais plus de bonus allechants. Pour faire court, Banzai Casino est une valeur sure pour les passionnes de casino ! En prime la navigation est intuitive et rapide, ajoutant une touche d’elegance et d’energie.
banzai slots casino avis|
J’apprecie enormement Betclic Casino, c’est une veritable energie de jeu irresistible. La selection de jeux est phenomenale, avec des machines a sous modernes et captivantes. Le service client est exceptionnel, offrant des reponses rapides et precises. Les transactions sont parfaitement protegees, neanmoins les bonus pourraient etre plus frequents. En fin de compte, Betclic Casino vaut amplement le detour pour les amateurs de casino en ligne ! De plus le design est visuellement epoustouflant, renforce l’immersion totale.
contacter betclic|
Актуальные автобусные рейсы по Беларуси и Росии — от крупных городов до самых уютных маленьких станций. Туристические туры и экскурсии — будь то прогулка по старинным улочкам европейского города или активный уикенд на природе. Авиабилеты — могли перемещаться не только по дорогам, но и по воздуху, открывая всё новые горизонты. Всё это вы подбираете прямо на Probilets и оплачиваете удобным способом: заказ билетов на автобус
Казино Leonbets слот Aztec Twist
Battle of Cards
http://images.google.ba/url?q=https://shayari-in-english.com/como-verificar-tu-cuenta-en-pin-up-casino/ – Pin Up Casino Mexico – A popular online casino in Mexico!
как зайти на blacksprut blacksprut, блэкспрут, black sprut, блэк спрут, blacksprut вход, блэкспрут ссылка, blacksprut ссылка, blacksprut onion, блэкспрут сайт, blacksprut вход, блэкспрут онион, блэкспрут дакрнет, blacksprut darknet, blacksprut сайт, блэкспрут зеркало, blacksprut зеркало, black sprout, blacksprut com зеркало, блэкспрут не работает, blacksprut зеркала, как зайти на blacksprutd
где поиграть в Bamboo Fortune
Казино Вавада слот Bankin More Bacon
Казино Leonbets слот Banana Merge
Banquet of Dead слот
black sprut blacksprut, блэкспрут, black sprut, блэк спрут, blacksprut вход, блэкспрут ссылка, blacksprut ссылка, blacksprut onion, блэкспрут сайт, blacksprut вход, блэкспрут онион, блэкспрут дакрнет, blacksprut darknet, blacksprut сайт, блэкспрут зеркало, blacksprut зеркало, black sprout, blacksprut com зеркало, блэкспрут не работает, blacksprut зеркала, как зайти на blacksprutd
DeFiLlama simplifies DeFi insights. Monitor TVL, analyze yields, and explore cross-chain protocols for smarter crypto strategies.
Defilama
Казино Leonbets слот Aztec Sun
https://lakoshka.ru
Bankers Gone Bonkers online KZ
Comprare Cialis senza Ricetta Online Farmaci Italia
Cialis Online Senza Ricetta: Storie Vissute di Successo e Fallimento
Storia 1: Il Risparmio che e Costato Caro
Marco, 48 anni, ha trovato un sito che offriva Cialis a €0,80 per compressa invece di €2,10. “Pensavo di risparmiare 600 euro all’anno,” mi ha raccontato. Dopo tre mesi, ha iniziato a provare palpitazioni e vertigini. Una visita d’urgenza ha rivelato che il farmaco contraffatto conteneva sostanze chimiche pericolose che interagivano con il suo farmaco per la pressione. “Ho speso piu in cure mediche di quanto avrei mai pagato per il prodotto autentico,” ammette con rammarico.
Storia 2: La Scelta Intelligente
Giulia, 52 anni, dopo aver letto recensioni contrastanti, ha deciso di verificare attentamente la farmacia online. “Ho chiamato il numero verde del Ministero della Salute per verificare il numero di autorizzazione,” racconta. La farmacia richiedeva una videoconsultazione con un urologo e un follow-up mensile. Dopo 6 mesi, non solo ha risolto i suoi problemi, ma ha anche scoperto di avere un lieve problema alla prostata che e stato trattato tempestivamente.
Storia 3: L’Errore Comune
Alessandro, 45 anni, ha ordinato Cialis online senza consultare un medico. “Pensavo di conoscere il dosaggio giusto,” ammette. Ha combinato il Cialis con il suo farmaco per il cuore, causando una pericolosa caduta della pressione. “Non sapevo dell’interazione con i nitrati,” confessa. Oggi utilizza il farmaco sotto supervisione medica e conosce i limiti sicuri.
Storia 4: Il Falso Senso di Sicurezza
Francesca, 50 anni, ha acquistato Cialis da un sito che sembrava affidabile, con logo ufficiale e numero di autorizzazione. Solo dopo mesi ha scoperto che il numero era stato clonato da una vera farmacia. “Il prodotto sembrava funzionare, ma dopo 9 mesi ho avuto problemi cardiaci,” racconta. L’analisi del prodotto ha rivelato che conteneva solo il 60% del principio attivo e sostanze contaminanti..
I’m not sure where you’re getting your info, but good topic.
I needs to spend some time learning much more or understanding more.
Thanks for great information I was looking for this info for my mission.
алко помощь наркологическая http://narkologicheskaya-klinika-11.ru .
диплом бакалавра купить украина диплом бакалавра купить украина .
J’adore l’energie de DBosses, il propose une experience de jeu intense. Les options sont riches et dynamiques, offrant des machines a sous innovantes. Le support est disponible 24/7, garantissant un support immediat. Le processus est clair et sans complications, bien que j’aimerais plus de promotions variees. En fin de compte, DBosses est un choix incontournable pour les joueurs pour les fans de jeux modernes ! Ajoutons que l’interface est fluide et moderne, amplifie le plaisir de jouer.
dbosses casino no deposit bonus|
Ich bin vollig hin und weg von King Billy Casino, es ist ein Online-Casino, das wie ein Konig regiert. Die Casino-Optionen sind vielfaltig und prachtig, mit modernen Casino-Slots, die verzaubern. Die Casino-Mitarbeiter sind schnell wie ein koniglicher Bote, mit Hilfe, die wie ein Thron majestatisch ist. Auszahlungen im Casino sind schnell wie ein koniglicher Marsch, aber mehr regelma?ige Casino-Boni waren koniglich. Insgesamt ist King Billy Casino ein Casino mit einem Spielspa?, der wie ein Kronungsfest funkelt fur Spieler, die auf majestatische Casino-Kicks stehen! Ubrigens das Casino-Design ist ein optisches Kronungsjuwel, Lust macht, immer wieder ins Casino zuruckzukehren.
king-billy casino welcome bonus|
https://www.te-in.ru/generator-dlya-trcz-razbiraemsya-v-detalyax.html/
Je suis a fond dans Gamdom, c’est une plateforme qui envoie du lourd. Le catalogue de jeux est juste enorme, avec des slots qui claquent grave. L’assistance est au top du top, joignable par chat ou email. Les paiements sont fluides et blindes, quand meme les offres pourraient etre plus genereuses. En gros, Gamdom offre une experience de ouf pour les pirates des slots modernes ! Bonus l’interface est fluide et stylee a mort, ajoute un max de swag.
gamdom germany|
кракен онион тор kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
https://maps.google.tk/url?q=https://fireisland.com/metodos-de-pago-disponibles-en-pin-up-casino/ – Pin Up Casino Mexico – A popular online casino in Mexico!
https://push-network-rankings.com/
Казино вавада официальный сайт vavada casino официальный сайт: The official website of Vavada Casino – your gateway to exciting games and big wins!
Je raffole de Circus, ca offre une experience electrisante. Les options de jeu sont riches et variees, proposant des sessions live palpitantes. Le personnel assure un suivi de qualite, avec une aide personnalisee. Le processus est clair et sans complications, neanmoins les offres pourraient etre plus genereuses. En resume, Circus offre une aventure inoubliable pour les fans de jeux modernes ! Ajoutons que la navigation est intuitive et rapide, facilite une immersion totale.
poker circus|
kraken сайт kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Je suis totalement envoute par FatPirate, c’est une plateforme qui envoie du lourd. Le choix de jeux est monumental, avec des slots qui dechirent. Les agents sont rapides comme l’eclair, offrant des reponses claires et stylees. Les retraits sont rapides comme une tempete, mais bon des bonus plus reguliers ce serait cool. Bref, FatPirate offre une experience de ouf pour les accros aux sensations fortes ! Et puis le design est style et accrocheur, facilite le delire total.
fatpirate 5|
https://usk-rus.ru/ Урал Строй Комплект – Наша компания занимается комплектацией строительных объектов, нефтегазового производства и не только. Одно из главных направлений работы – это гражданское строительство, где наши задачи – поставка металлических изделий и конструкций, труб, сыпучих строительных смесей, других стройматериалов. Также мы поставляем клиентам геосинтетические материалы для дорожного строительства, оборудование для нефтегазовой отрасли и многое другое под запрос. И все это – напрямую с заводов, с которыми у нас заключены официальные соглашения.
http://images.google.al/url?q=https://clevone.mx/pin-up-casino-movil-para-jugadores-mexicanos/ – Pin Up Casino Mexico – A popular online casino in Mexico!
Je kiffe a fond Impressario, ca balance une vibe spectaculaire. Le catalogue est un festival de titres, offrant des machines a sous qui claquent. L’assistance est une vraie performance de pro, avec une aide qui fait mouche. Les retraits sont fluides comme une choregraphie, de temps en temps les offres pourraient etre plus genereuses. Bref, Impressario offre un spectacle de jeu inoubliable pour les artistes du jeu ! Cote plus le site est une pepite scenique, donne envie de revenir pour un rappel.
impressario casino|
Deneme Bonusu Güncel fırsatlarıyla yatırım yapmadan oyun keyfi yaşa. Lisanslı ve güvenilir sitelerde risksiz kazancın tadını çıkar!
kraken darknet kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
kasina Kasina: Objevte svet hazardu! Klasicke hry, moderni automaty a vzruseni z vyhry – vse pod jednou strechou, at uz online nebo offline.
kasina CZ Casino Online: Find the best CZ casino online! Read reviews, compare bonuses, and choose the perfect platform for your gaming needs and preferences.
https://popugaitut.ru
cz casino online CZ Casino Online: Vyberte si to nejlepsi ceske online kasino s licenci. Sledujte nase recenze, porovnavejte bonusy a vyberte si to, ktere nejlepe vyhovuje vasim preferencim.
Adoro o role insano de Flabet Casino, e um cassino online que e pura dinamite. O catalogo de jogos do cassino e uma loucura, oferecendo sessoes de cassino ao vivo que sao um fogo. O suporte do cassino ta sempre na area 24/7, acessivel por chat ou e-mail. Os saques no cassino sao velozes como um raio, as vezes queria mais promocoes de cassino que arrebentam. Na real, Flabet Casino vale demais explorar esse cassino para os cacadores de slots modernos de cassino! E mais a interface do cassino e fluida e cheia de vibe, o que deixa cada sessao de cassino ainda mais alucinante.
flabet saque|
Je kiffe grave AmunRa Casino, ca balance une vibe de jeu pharaonique. Le catalogue de jeux du casino est colossal, proposant des sessions de casino en direct qui envoutent. Le staff du casino assure un suivi digne d’une divinite, joignable via chat ou email. Les retraits au casino sont fluides et rapides comme le Nil, de temps en temps des recompenses de casino en plus ca ferait vibrer. En bref, AmunRa Casino est un temple de jeu a ne pas rater pour ceux qui kiffent parier avec style au casino ! Par ailleurs le site du casino est une merveille graphique, facilite le delire total au casino.
amunra casino lizenz|
Je kiffe grave Instant Casino, c’est un casino en ligne qui envoie du lourd. Le catalogue de jeux de casino est colossal, avec des slots de casino modernes et immersifs. Le support du casino est dispo 24/7, avec une aide qui pete le feu. Les transactions de casino sont simples comme un neon, par contre des recompenses de casino en plus ca ferait kiffer. Bref, Instant Casino garantit un fun de casino supersonique pour les aventuriers du casino ! En prime la plateforme du casino claque avec son look electrisant, facilite le delire total au casino.
red stag online casino instant play|
kraken зеркало kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
En iyi deneme bonusu veren siteler ve popüler casino siteleri ile yüksek kazanç fırsatlarını keşfedin. Yeni siteler ve güncel bonuslar sizi bekliyor.
ankara cam filmi
ankara ppf kaplama
Estou pirando com DazardBet Casino, tem uma vibe de jogo alucinante. A selecao de titulos do cassino e de outro mundo, oferecendo sessoes de cassino ao vivo que sao um arraso. Os agentes do cassino sao rapidos como um raio, dando solucoes claras e na hora. Os ganhos do cassino chegam na velocidade da luz, mas as ofertas do cassino podiam ser mais generosas. No fim das contas, DazardBet Casino e o point perfeito pros fas de cassino para os aventureiros do cassino! Vale dizer tambem a navegacao do cassino e facil como brincar, torna o cassino uma curticao total.
dazardbet casino|
Je suis totalement subjugue par Julius Casino, on dirait une conquete de fun. La collection de jeux du casino est colossale, incluant des jeux de table de casino d’une noblesse rare. Les agents du casino sont rapides comme une legion en marche, avec une aide qui commande le respect. Les transactions du casino sont simples comme un decret, quand meme plus de tours gratuits au casino ce serait epique. Globalement, Julius Casino est un casino en ligne qui regne en maitre pour les passionnes de casinos en ligne ! De surcroit la plateforme du casino brille par son style imperial, facilite une experience de casino heroique.
julius casino bonus sans depot|
kraken зеркало рабочее kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
http://www.bon-vivant.net/url?q=https://ironroller.com.mx/pin-up-casino-mexico-guia-para-nuevos-jugadores/ – Pin Up Casino Mexico – A popular online casino in Mexico!
Je suis absolument transporte par Bruno Casino, on dirait un raz-de-maree de fun. Les choix de jeux au casino sont varies et enivrants, comprenant des jeux de casino optimises pour les cryptomonnaies. Le support du casino est disponible 24/7, joignable par chat ou email. Les paiements du casino sont surs et sans accroc, quand meme les offres du casino pourraient etre plus genereuses. Dans l’ensemble, Bruno Casino promet un divertissement de casino electrisant pour les amoureux des slots modernes de casino ! A noter la plateforme du casino brille par son style audacieux, ajoute une touche de panache au casino.
bruno casino inscription|
Sou viciado no role de LeaoWin Casino, e um cassino online que ruge como um leao. Os titulos do cassino sao um espetaculo selvagem, com slots de cassino unicos e eletrizantes. O suporte do cassino ta sempre na area 24/7, acessivel por chat ou e-mail. Os saques no cassino sao velozes como um predador, mesmo assim mais bonus regulares no cassino seria top. Em resumo, LeaoWin Casino oferece uma experiencia de cassino que e puro rugido para os aventureiros do cassino! Alem disso a plataforma do cassino detona com um visual que e puro rugido, torna o cassino uma curticao total.
leaowin02 casino promo code 2024|
kraken онион тор kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
https://images.google.com/url?q=https://colossus.mx/2025/09/05/es-seguro-jugar-en-pin-up-casino-en-mexico/ – Pin Up Casino Mexico – A popular online casino in Mexico!
https://halif-omsk.ru
controllo glicemico
https://usk-rus.ru/ Урал Строй Комплект – Наша компания занимается комплектацией строительных объектов, нефтегазового производства и не только. Одно из главных направлений работы – это гражданское строительство, где наши задачи – поставка металлических изделий и конструкций, труб, сыпучих строительных смесей, других стройматериалов. Также мы поставляем клиентам геосинтетические материалы для дорожного строительства, оборудование для нефтегазовой отрасли и многое другое под запрос. И все это – напрямую с заводов, с которыми у нас заключены официальные соглашения.
русское порно русское порно
kraken рабочая ссылка onion kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
benessere degli occhi
Want to have fun? hack apk Watch porn, buy heroin or ecstasy. Pick up whores or buy marijuana. Come in, we’re waiting
Mochten Sie ein grundstuck kaufen am meer kaufen? Tolle Angebote am Meer und in den Bergen. Gro?e Auswahl an Immobilien, Unterstutzung bei der Immobilienauswahl, Transaktionsunterstutzung und Registrierung. Leben Sie in einem Land mit mildem Klima und wunderschoner Natur.
Новые актуальные iherb промокод для новых для выгодных покупок! Скидки на витамины, БАДы, косметику и товары для здоровья. Экономьте до 30% на заказах, используйте проверенные купоны и наслаждайтесь выгодным шопингом.
SEO LINKS 10 000 I have a powerful server backlink building
External links of your site on community platforms, sections, comments.
Three-stage backlink strategy
Stage 1 – Basic inbound links.
Step 2 – Links via 301 redirects from highly reliable sites with a PageRank score of 9–10, for example –
Stage 3 – Submitting to analyzer sites –
The advantage of analyzer sites is that they display the Google search engine a website structure, which is very important!
Note for the third stage – only the homepage of the site is submitted to analyzers, internal pages aren’t accepted.
I execute all three stages step by step, resulting in 10K–20K inbound links from the full process.
This backlink strategy is most effective.
Demonstration of placement on SEO platforms via a text file.
Ledger Wallet keeps your private keys offline for maximum security. Ledger Live integrates everything you need for secure crypto management and effortless transactions.
ledger live web
Linking to your site using redirect site analyzers. backlink building
In this project, I suggest to place your site on analysis platforms not through a link in a file, but to embed it in the SEO software itself and post the resulting links in blogs and comments so that Google recognizes the relationship through credibility.
Such links are beneficial for the webpage.
The number of links on SEO analyzers is 50 links, I will post pre-created links in comment sections and blogs in the amount that you choose from 3 options.
This further increases the ranking power of your website and is highly beneficial for Google.
Only the main page of the website is placed in the analysis tools, inner pages are excluded.
For these backlinks we get diversity.
An example of how your site will be hosted and what URL will be posted on the online forums.
This hosting is safe for your online resource.
I also give links to the hosted site on analyzer sites.
http://google.ne/url?q=https://mex.studio10.com.mx/pin-up/pin-up-casino-en-mexico-vale-la-pena/ – Pin Up Casino Mexico – A popular online casino in Mexico!
bs2best
best articles on the net: https://dnscompetition.in/pa/articles/setting-up-dns-for-online-stores-a-comprehensive-guide/
кракен даркнет маркет kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
кракен darknet kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
J’adore la frenesie de CasinoClic, il propose une aventure de casino qui fait vibrer. La selection du casino est une explosion de plaisirs, incluant des jeux de table de casino d’une elegance eclatante. Le support du casino est disponible 24/7, repondant en un flash lumineux. Le processus du casino est transparent et sans turbulence, par moments des bonus de casino plus frequents seraient explosifs. Au final, CasinoClic offre une experience de casino eclatante pour les explorateurs du casino ! De surcroit le design du casino est une explosion visuelle eclatante, amplifie l’immersion totale dans le casino.
clic online casino|
Ich bin total begeistert von Lapalingo Casino, es pulsiert mit einer elektrisierenden Casino-Energie. Die Casino-Optionen sind bunt und mitrei?end, mit einzigartigen Casino-Slotmaschinen. Das Casino-Team bietet Unterstutzung, die wie ein Stern strahlt, antwortet blitzschnell wie ein Donnerschlag. Der Casino-Prozess ist klar und ohne Wellen, manchmal mehr regelma?ige Casino-Boni waren ein Knaller. Kurz gesagt ist Lapalingo Casino ein Muss fur Casino-Fans fur Fans von Online-Casinos! Ubrigens die Casino-Plattform hat einen Look, der wie ein Blitz funkelt, den Spielspa? im Casino in den Himmel hebt.
lapalingo zahlungsmethoden|
Ich bin total begeistert von iWild Casino, es verstromt eine Spielstimmung, die wie ein Gewitter knallt. Die Casino-Optionen sind vielfaltig und elektrisierend, mit Live-Casino-Sessions, die wie ein Sturm toben. Der Casino-Support ist rund um die Uhr verfugbar, ist per Chat oder E-Mail erreichbar. Auszahlungen im Casino sind schnell wie ein Flusslauf, manchmal mehr regelma?ige Casino-Boni waren ein Knaller. Alles in allem ist iWild Casino ein Muss fur Casino-Fans fur Fans von Online-Casinos! Nebenbei die Casino-Oberflache ist flussig und strahlt wie ein Tropenwald, das Casino-Erlebnis total wild macht.
iwild casino gutscheincode|
Je suis totalement ebloui par JackpotStar Casino, il propose une aventure de casino qui illumine tout. La collection de jeux du casino est astronomique, incluant des jeux de table de casino d’une elegance astrale. Les agents du casino sont rapides comme une comete, assurant un support de casino immediat et eclatant. Les gains du casino arrivent a une vitesse interstellaire, par moments des bonus de casino plus frequents seraient stellaires. En somme, JackpotStar Casino promet un divertissement de casino scintillant pour les passionnes de casinos en ligne ! Par ailleurs le design du casino est une explosion visuelle astrale, amplifie l’immersion totale dans le casino.
jackpotstar|
лучшие казино для игры Big Win x25
Best slot games rating
Service rubber stamp maker online|stamp making online|rubber stamp online maker|stamp maker|online stamp maker|stamp maker online|stamp creator online|make a stamp online|make stamp online|online stamp design maker|make stamps online|stamps maker|online stamp creator|stamp online maker|stamp online maker free|stamp maker online free|create stamp online free|stamp creator online free|online stamp maker free|free online stamp maker|free stamp maker online|make stamp online free allows you to create and order stamps online.
The internet has made it easier for people to access rubber stamp makers and create their own custom stamps. The process of creating a rubber stamp online is straightforward and requires minimal effort the user can choose from a variety of options, including the size and material of the stamp. it is also a fun and creative way for people to express themselves .
this makes it ideal for people who are short on time or have busy schedules. users can choose from a variety of fonts, colors, and images to create their custom stamp . users can create their own custom stamps at a fraction of the cost of traditional methods .
How to Use a Rubber Stamp Maker Online
the website will provide options for customizing the stamp, including the size and material. The first step in using a rubber stamp maker online is to choose a design or template . they will be asked to provide their contact and payment information .
they can also add additional features, such as a handle or a ink pad. the tools include features such as text editing and image uploading. the website is easy to navigate and provides clear instructions.
Benefits of Using a Rubber Stamp Maker Online
Using a rubber stamp maker online offers a number of benefits, including convenience, cost-effectiveness, and customization . users can choose from a variety of fonts, colors, and images to create their custom stamp . In addition to the convenience and design options, the rubber stamp maker online is also environmentally friendly .
this can help to establish their brand and create a professional image. users can use these tools to promote their business and increase their online presence . In addition to the marketing tools, the rubber stamp maker online also offers a range of customer support options .
Conclusion
it offers a range of benefits, including convenience, cost-effectiveness, and customization . The online rubber stamp maker is a great resource for businesses, individuals, and organizations that need to create custom stamps for their documents . The rubber stamp maker online is a user-friendly platform that makes it easy for people to create their own custom stamps .
users can create their own custom stamps at a fraction of the cost of traditional methods . users can choose from a variety of fonts, colors, and images to create their custom stamp . The rubber stamp maker online is a great resource for anyone who needs to create custom stamps .
Казино Pinco слот Bill & Coin
Если вам нужны качественные услуги клининг|клининг в москве|клининг москва|клининговая компания|клининговая компания в москве|клининговая компания москва|заказать клининг|клининговая служба|клининг москва уборка|услуги клининга|услуги клининга в москве цены на услуги|клининг мск|клининг компании в москве|клининг уборка|заказать клининг в москве|клининг в москве цена|клининг компания|сайт клининговой компании|сайт клининга, мы готовы предложить вам лучшее решение!
Тщательное обсуждение всех нюансов поможет достичь наилучшего результата.
Если вы ищете зимние шины шипованные|зимняя резина шипованная|резина зимняя шипованная|купить шины шипованные|купить шипованные шины|купить шипованную резину|шины зимние шипованные купить|зимняя резина шипованная купить|зимняя шипованная резина спб|шипованные шины цена|купить зимнюю шипованную резину в санкт петербурге|автошины шипованные|шипованная резина зима|автошины зимние шипованные|недорогая зимняя шипованная резина|недорогая шипованная резина|авторезина шипованная|шипованная резина новая купить|купить зимнюю резину в спб недорого шипованную|покрышки зимние шипованные купить спб, у нас есть отличный выбор по доступным ценам!
Шипы иногда приводят к увеличению изношенности асфальта. Кроме того, шипованные шины могут быть менее эффективными
Visit the site full hd film izle 4k|film izle 4k|kirpi sonic resmi|4k film izle|full film izle 4k|4k filmizle|hd film izle|turkce dublaj filmler 4k|film izle turkce|romulus turkce dublaj izle|filmizle 4k|4 k film izle|4k f?lm ?zle|4k turkce dublaj filmler|k?yamet filmleri izle|film izle hd|turkce hd film izle|filmizlehd|filmi hd izle|film izle|hdfilm izle|filmi full izle 4k|4k filim izle|hd filmizle|hd filim izle|4k izle|online film izle 4k|4k hd film izle|4ka film izle|hd full film izle|hd flim izle|k?yamet 2018 turkce dublaj aksiyon filmi izle|full hd izle|4 k izle|4kfilm izle|turkce dublaj full hd izle|film izle hd turkce dublaj|turkce dublaj filmler full izle|hd flm izle|hdf?lm ?zle|4k flim izle|hd izle|hd turkce dublaj izle|s?k?ysa yakala|hd film izle turkce dublaj|4k izle film|sonsuz s?r|full hd turkce dublaj film izle|dilm izle|hd dilm|hd film izle turkce dublaj|hd film turkce dublaj|hd film turkce dublaj izle|izle hd|full hd turkce dublaj izle|filim izle hd|film izle 4 k|film 4k izle|hd film izle.|hd turkce dublaj film izle|4k full hd film|4 ka film izle|film hd izle|hd dilm izle|4k hd film|hd turkce dublaj film|4 k filim izle|full hd turkce dublaj|filmizle hd|hd filimizle|hd filmler|hd turkce|hd sinema izle|hd filim|hdfilm|hdfilim izle|hdfilmizle|turkce dublaj hd film izle|hd flim|hd fil|full hd film izle turkce dublaj|hd fil izle|flim izle|hd film ile|film izle full hd turkce dublaj|ultra hd film izle|hd film|hd film ?zle|hd film ize|full izle|hd film.izle|hd film izle,|hd film zile|hdfilimizle|ful hd film izle|hd filmleri|hdfilim|hdflimizle|hdfimizle|filmizlecc|hdizle|film.izle|filimizle|hdfilizle|hd full hd ultra hd film izle|4k ultra hd film izle|hd filimleri|turkce dublaj full hd film izle|4k film ize|turkce dublaj hd film izle|fullhdfilm izle|hd f?l?m ?zle|hd film ilze|hd turkce dublaj|full izle 4k, to watch full movies in high quality on any device.
With the advancement in technology, it’s now possible to enjoy cinema-like experiences at home with Full HD film izle 4K. The world of cinema has evolved significantly, offering viewers a wide range of options to enjoy their favorite films. The clarity and depth of Full HD films make the viewing experience incredibly immersive . Moreover, the convenience of streaming services has made it easier than ever to access Full HD content .
The transition from standard definition to high definition was a major leap . The impact of Full HD on the film industry cannot be overstated. As a result, viewers are now treated to a more engaging and realistic cinematic experience with Full HD film izle 4K. Additionally, No longer are viewers limited by geographical constraints or physical media .
Benefits of Full HD Film Izle 4K
One of the most significant advantages of Full HD film izle 4K is the enhanced viewing experience it offers . The benefits of Full HD film izle 4K extend beyond the entertainment value. It has also become an important factor in the purchasing decisions of consumers when it comes to electronic devices . Furthermore, Documentary films and educational content in Full HD can provide a more engaging and effective learning experience .
As the demand for Full HD film izle 4K continues to rise, it is likely that we will see significant investments in this sector. The future of Full HD film izle 4K looks promising. The integration of artificial intelligence and virtual reality into filmmaking will further enhance the viewing experience .
Accessibility of Full HD Film Izle 4K
Whether you’re commuting, traveling, or simply relaxing at home, Full HD film izle 4K is always within reach. The ease of access to Full HD content has been a game-changer. With Full HD film izle 4K, the boundaries of time and space are virtually eliminated. Moreover, Affordable subscription plans and free streaming options have made high-quality content more accessible to a wider audience .
This, in turn, will drive innovation and investment in the film industry, leading to even better content and viewing experiences. The role of technology in enhancing accessibility is crucial. As these technologies continue to evolve, we can expect even smoother and more reliable streaming experiences .
Future of Full HD Film Izle 4K
The integration of emerging technologies like AI, VR, and AR will take Full HD film izle 4K to new heights. The potential for innovation in Full HD film izle 4K is vast. The use of AI in filmmaking could lead to more realistic special effects and personalized storylines . Additionally, The shift towards digital content reduces the need for physical media, thereby decreasing carbon footprint .
By showcasing diverse stories and perspectives, Full HD films can play a significant role in shaping our worldview. Furthermore, the educational value of Full HD film izle 4K should not be underestimated .
https://elfasamara.ru
Black Hawk играть в Мелбет
карго грузы из китая выкуп товара из китая доставка в россию
Visit full hd film izle 4k|film izle 4k|kirpi sonic resmi|4k film izle|full film izle 4k|4k filmizle|hd film izle|turkce dublaj filmler 4k|film izle turkce|romulus turkce dublaj izle|filmizle 4k|4 k film izle|4k f?lm ?zle|4k turkce dublaj filmler|k?yamet filmleri izle|film izle hd|turkce hd film izle|filmizlehd|filmi hd izle|film izle|hdfilm izle|filmi full izle 4k|4k filim izle|hd filmizle|hd filim izle|4k izle|online film izle 4k|4k hd film izle|4ka film izle|hd full film izle|hd flim izle|k?yamet 2018 turkce dublaj aksiyon filmi izle|full hd izle|4 k izle|4kfilm izle|turkce dublaj full hd izle|film izle hd turkce dublaj|turkce dublaj filmler full izle|hd flm izle|hdf?lm ?zle|4k flim izle|hd izle|hd turkce dublaj izle|s?k?ysa yakala|hd film izle turkce dublaj|4k izle film|sonsuz s?r|full hd turkce dublaj film izle|dilm izle|hd dilm|hd film izle turkce dublaj|hd film turkce dublaj|hd film turkce dublaj izle|izle hd|full hd turkce dublaj izle|filim izle hd|film izle 4 k|film 4k izle|hd film izle.|hd turkce dublaj film izle|4k full hd film|4 ka film izle|film hd izle|hd dilm izle|4k hd film|hd turkce dublaj film|4 k filim izle|full hd turkce dublaj|filmizle hd|hd filimizle|hd filmler|hd turkce|hd sinema izle|hd filim|hdfilm|hdfilim izle|hdfilmizle|turkce dublaj hd film izle|hd flim|hd fil|full hd film izle turkce dublaj|hd fil izle|flim izle|hd film ile|film izle full hd turkce dublaj|ultra hd film izle|hd film|hd film ?zle|hd film ize|full izle|hd film.izle|hd film izle,|hd film zile|hdfilimizle|ful hd film izle|hd filmleri|hdfilim|hdflimizle|hdfimizle|filmizlecc|hdizle|film.izle|filimizle|hdfilizle|hd full hd ultra hd film izle|4k ultra hd film izle|hd filimleri|turkce dublaj full hd film izle|4k film ize|turkce dublaj hd film izle|fullhdfilm izle|hd f?l?m ?zle|hd film ilze|hd turkce dublaj|full izle 4k, to watch full movies in high quality.
The introduction of Full HD film izle 4K has revolutionized the way we watch movies, providing crystal-clear images and immersive sound.
Benefits of Watching Full HD Film Izle 4K
Furthermore, Full HD film izle 4K is also becoming increasingly affordable, with a range of devices and services available to suit all budgets.
How to Watch Full HD Film Izle 4K
Once you have the right device, you can access a range of Full HD film izle 4K content through streaming services or by purchasing individual movies.
Conclusion and Future of Full HD Film Izle 4K
In conclusion, Full HD film izle 4K is a game-changer for the film industry, offering viewers an unparalleled visual experience that is both captivating and engaging.
шпонирование москва шпонирование
If you are looking for an experienced next.js developer|next js developer|next developer|next developer freelancer|next freelancer|next js freelancer|hire next.js developer|freelance next.js developer|remote next.js developer|next.js full-stack developer|next.js developer for hire|custom next.js development|next.js website developer|next.js expert freelancer|next.js web app developer|next.js ssr developer|next.js seo expert|next.js performance optimization|next.js developer portfolio|next.js development services|next.js developer available|hire freelance next.js developer|experienced next.js developer|next.js + react developer|full-time next.js freelancer,who can create a high-performance and scalable website using Next.js technology, you can find the right specialist offering a wide range of development services on this platform.
Next.js is a versatile tool for creating fast and scalable web applications . With its ability to handle server-side rendering and static site generation, it has become a go-to choice for developers looking to create fast and efficient web applications. there is a growing need for professionals who can develop high-quality web applications using Next.js.
As a result, many developers are looking to acquire Next.js skills . With the right skills and knowledge, developers can build high-performance websites that provide a great user experience . Next.js developers are in high demand, and they can command high salaries and benefits .
Key Skills for Next.js Developers
To become a successful Next.js developer, one needs to have a solid grasp of programming concepts and experience with Next.js. This includes proficiency in JavaScript and React, as well as experience with Node.js and other related technologies . A good Next.js developer should also have excellent problem-solving skills and attention to detail .
In addition to technical skills, Next.js developers should be familiar with industry standards and trends . This includes knowledge of web security and performance optimization . By possessing these skills and knowledge, Next.js developers can create high-quality web applications that meet the needs of users .
Next.js Developer Job Responsibilities
the role of a Next.js developer involves a range of tasks and activities . This includes creating fast and scalable web applications using Next.js . Next.js developers are also responsible for troubleshooting and debugging issues .
In addition to these technical tasks, Next.js developers may also be involved in planning and designing web applications . They may also be responsible for participating in online communities and forums. By fulfilling these responsibilities, Next.js developers can create high-quality web applications that meet the needs of users .
Future of Next.js Development
The future of Next.js development looks bright, with a wide range of job opportunities available for Next.js professionals. As the web development landscape continues to evolve, Next.js is likely to play a major role in shaping the future of web development . With its ability to handle server-side rendering and static site generation, Next.js is well-positioned to meet the needs of modern web development .
As a result, the demand for Next.js developers is expected to continue growing in the future . By acquiring Next.js skills and knowledge, developers can create high-quality web applications that meet the needs of users . With the right skills and knowledge, developers can work on complex and challenging web projects.
integratori benessere
услуги геодезиста цены геодезия цена московская область
геотекстиль комитекс нетканый геотекстиль геотекс
odtülüden özel ders
http://images.google.tm/url?q=https://digicontechnologies.com/juegos-de-mesa-disponibles-en-pin-up-casino/ – Pin Up Casino Mexico – A popular online casino in Mexico!
Amazing article, cheers, I will bookmark you now.
Казино Ramenbet
cura pelle
Blazin Rails играть в риобет
Включение в реестр Минпромторга https://minprom-info.ru официальный путь для подтверждения отечественного производства. Подготовка и подача документов, юридическое сопровождение и консультации для производителей.
Занятия по самообороне https://safety-skills.ru практические навыки защиты в реальных ситуациях, развитие силы и выносливости. Профессиональные тренеры помогут освоить приемы борьбы, удары и тактику безопасности.
Платформа онлайн-обучения https://craftsmm.ru курсы по маркетингу, продажам и рекламе для новичков и профессионалов. Освойте современные инструменты продвижения, увеличьте продажи и развивайте карьеру в удобном формате.
Написание дипломов на заказ https://vasdiplom.ru помощь студентам в подготовке итоговых работ. Авторские тексты, проверка на уникальность и полное соответствие стандартам учебных заведений.
интернет https://sosal-vodkabet.io/
Big Sugar Bonanza mostbet AZ
Bonus Veren Siteler, yatırım yapmadan oyun keyfi yaşamanızı sağlar. Lisanslı ve güvenilir platformlarda bedava bonus fırsatlarını keşfedin!
Ich finde absolut irre Lapalingo Casino, es verstromt eine Spielstimmung, die wie ein Feuerwerk knallt. Die Spielauswahl im Casino ist wie ein Ozean voller Schatze, mit Live-Casino-Sessions, die wie ein Gewitter krachen. Der Casino-Support ist rund um die Uhr verfugbar, mit Hilfe, die wie ein Funke spruht. Casino-Gewinne kommen wie ein Sturm, trotzdem wurde ich mir mehr Casino-Promos wunschen, die explodieren. Kurz gesagt ist Lapalingo Casino ein Casino, das man nicht verpassen darf fur die, die mit Stil im Casino wetten! Und au?erdem das Casino-Design ist ein optisches Spektakel, was jede Casino-Session noch aufregender macht.
lapalingo free spins|
Adoro o clima explosivo de JabiBet Casino, parece uma correnteza de diversao. Os titulos do cassino sao um espetaculo a parte, com caca-niqueis de cassino modernos e envolventes. O atendimento ao cliente do cassino e uma mare de qualidade, garantindo suporte de cassino direto e sem tempestade. Os saques no cassino sao velozes como um redemoinho, mas queria mais promocoes de cassino que arrasam. Na real, JabiBet Casino oferece uma experiencia de cassino que e puro fluxo para os cacadores de slots modernos de cassino! Alem disso o site do cassino e uma obra-prima de estilo, aumenta a imersao no cassino como uma onda gigante.
jabibet app download|
Ich liebe die Magie von JokerStar Casino, es ist ein Online-Casino, das wie ein Komet leuchtet. Die Casino-Optionen sind bunt und mitrei?end, mit Casino-Spielen, die fur Kryptowahrungen optimiert sind. Der Casino-Service ist zuverlassig und magisch, mit Hilfe, die wie ein Zauberspruch wirkt. Casino-Zahlungen sind sicher und reibungslos, aber die Casino-Angebote konnten gro?zugiger sein. Zusammengefasst ist JokerStar Casino ein Online-Casino, das die Sterne vom Himmel holt fur Fans von Online-Casinos! Ubrigens die Casino-Plattform hat einen Look, der wie ein Sternenstaub funkelt, einen Hauch von Magie ins Casino bringt.
jokerstar online casino|
Je suis accro a LeoVegas Casino, il propose une aventure de casino digne d’une couronne. Le repertoire du casino est un palais de divertissement, comprenant des jeux de casino optimises pour les cryptomonnaies. L’assistance du casino est noble et efficace, avec une aide qui inspire le respect. Les paiements du casino sont securises et fluides, quand meme des bonus de casino plus frequents seraient royaux. Au final, LeoVegas Casino est un joyau pour les fans de casino pour ceux qui cherchent l’adrenaline majestueuse du casino ! De surcroit l’interface du casino est fluide et somptueuse comme un trone, ajoute une touche de splendeur au casino.
leovegas boni|
Казино Champion слот Bitcasino Billion
Нужны похоронные услуги: ритуальные услуги цены адреса
HBet – Cổng giải trí trực tuyến hàng đầu, quy tụ hàng ngàn trò chơi cá cược thể thao, casino, slot game và bắn cá đổi thưởng. Giao diện mượt mà, bảo mật tuyệt …
https://maps.google.de/url?q=https://enah.edu.mx/css/pgs/?pin_up_casino_mexico__ultimate_guide_to_online_gaming__bonuses__and_legal_insights_in_2025.html – Pin Up Casino Mexico – A popular online casino in Mexico!
Нужны похоронные услуги: мусульманские похороны как проходят
лучшие нейросети для учёбы
Казино Ramenbet слот Big Sugar Bonanza
узнать больше Здесь https://sosal-vodkabet.io/
Black Lotus игра
ссылка на сайт https://sosal-vodkabet.io/
нажмите, чтобы подробнее https://sosal-vodkabet.io/
Bison Trail AZ
лучшие казино для игры Black Booze
в этом разделе https://vodkabet.kz/
Следующая страница https://sosal-vodkabet.io/
http://maps.google.ie/url?q=https://enah.edu.mx/css/pgs/?pin_up_casino_mexico__ultimate_guide_to_online_gaming__bonuses__and_legal_insights_in_2025.html – Pin Up Casino Mexico – A popular online casino in Mexico!
онлайн казино для игры Black Hawk
Ich bin suchtig nach LuckyNiki Casino, es bietet ein Casino-Abenteuer, das wie ein Sternenstaub funkelt. Die Auswahl im Casino ist ein echtes Glanzlicht, mit Casino-Spielen, die fur Kryptowahrungen optimiert sind. Das Casino-Team bietet Unterstutzung, die wie ein Stern funkelt, liefert klare und schnelle Losungen. Der Casino-Prozess ist klar und ohne Trugbilder, dennoch wurde ich mir mehr Casino-Promos wunschen, die glitzern. Insgesamt ist LuckyNiki Casino ein Casino mit einem Spielspa?, der wie ein Komet leuchtet fur Fans moderner Casino-Slots! Extra die Casino-Navigation ist kinderleicht wie ein Zauberspruch, das Casino-Erlebnis total verzaubert.
luckyniki ????|
Je suis totalement ensorcele par Luckster Casino, on dirait une fontaine de chance. La collection de jeux du casino est un veritable grimoire, incluant des jeux de table de casino d’une elegance mystique. Le service client du casino est un charme puissant, repondant en un eclat de magie. Les gains du casino arrivent a une vitesse magique, parfois des bonus de casino plus frequents seraient ensorcelants. Au final, Luckster Casino est un casino en ligne qui porte chance pour les amoureux des slots modernes de casino ! De surcroit l’interface du casino est fluide et lumineuse comme une aurore magique, amplifie l’immersion totale dans le casino.
luckster new customer offer|
Je suis fou de MonteCryptos Casino, c’est un casino en ligne qui grimpe comme un sommet enneige. La collection de jeux du casino est un veritable pic de divertissement, comprenant des jeux de casino optimises pour les cryptomonnaies. Les agents du casino sont rapides comme un vent de montagne, assurant un support de casino immediat et robuste. Le processus du casino est transparent et sans crevasses, cependant j’aimerais plus de promotions de casino qui eblouissent. En somme, MonteCryptos Casino est un casino en ligne qui atteint des sommets pour les aventuriers du casino ! De surcroit le site du casino est une merveille graphique enneigee, amplifie l’immersion totale dans le casino.
montecryptos kritik|
Blazin Rails
Lucky Spin brings the thrill of big wins to your fingertips! Spin the wheel, score great rewards, and enjoy non-stop excitement. Start spinning today! Lucky Spin
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Элитные автомобили: стиль жизни и советы, загляните сюда.
Вот, делюсь ссылкой:
[url=https://cadillac-forum.ru]https://cadillac-forum.ru[/url]
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
http://google.com.kh/url?q=https://suryucatan.tecnm.mx/pages/?pinup_casino_m_xico__la_mejor_experiencia_de_juego_en_l_nea.html – Pin Up Casino Mexico – A popular online casino in Mexico!
I love how you write—it’s like having a conversation with a good friend. Can’t wait to read more!This post pulled me in from the very first sentence. You have such a unique voice!Seriously, every time I think I’ll just skim through, I end up reading every word. Keep it up!Your posts always leave me thinking… and wanting more. This one was no exception!Such a smooth and engaging read—your writing flows effortlessly. Big fan here!Every time I read your work, I feel like I’m right there with you. Beautifully written!You have a real talent for storytelling. I couldn’t stop reading once I started.The way you express your thoughts is so natural and compelling. I’ll definitely be back for more!Wow—your writing is so vivid and alive. It’s hard not to get hooked!You really know how to connect with your readers. Your words resonate long after I finish reading.
Казино Pinco слот Blade & Fangs
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Хочу выделить материал про Обзоры и история брендов часов: новости и руководства.
Вот, делюсь ссылкой:
https://buytime.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Want to have fun? porno melbet Whores, drugs, casino. We have it all, any drugs are on sale.
https://110km.ru/opinion/
купить меф астана пьяные шлюхи
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Советы и тренды путешествий: Всё об отелях”, нашел много полезного.
Вот, делюсь ссылкой:
https://hotelnews.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
монтаж наружного кондиционера http://kondicioner-obninsk-1.ru .
цена кв м натяжного потолка https://www.natyazhnye-potolki-lipeck-1.ru .
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Зацепил раздел про Присоединяйтесь к “Квазару” — учитесь и исследуйте космос!.
Ссылка ниже:
https://qazar.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Обучение и семинары https://uofs-beslan.ru для профессионалов: современные программы, практические кейсы и опыт экспертов. Развивайте навыки, повышайте квалификацию и получайте новые возможности для карьерного роста.
Академия парикмахерского искусства https://charm-academy.ru обучение от ведущих мастеров. Современные техники стрижек, окрашивания и укладок. Курсы для начинающих и профессионалов с практикой и дипломом по окончании.
Школа видеорекламы https://tatyanamostseeva.ru обучение созданию креативных роликов для бизнеса и брендов. Практические занятия, работа с современными инструментами и поддержка экспертов. Освойте профессию в сфере digital.
Лицей взаимного обучения https://talgenisty.ru уникальная среда для детей и взрослых. Совместные уроки, обмен опытом, мастер-классы и творческие проекты. Образование, основанное на поддержке и сотрудничестве.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Зацепил раздел про Ваш новый сайт готов к запуску!.
Вот, делюсь ссылкой:
https://alloopt.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Je trouve extraordinaire Casinova, on ressent une energie debordante. La selection de jeux est phenomenale, offrant des machines a sous a theme. Les agents sont rapides et professionnels, joignable via chat ou email. Le processus est clair et sans accroc, cependant les offres pourraient etre plus genereuses. Dans l’ensemble, Casinova assure une experience de jeu memorable pour les passionnes de sensations fortes ! De surcroit la plateforme est immersive et stylee, facilite une immersion totale.
casino casinova suomi|
Je trouve absolument enivrant LuckyBlock Casino, on dirait une pluie de trefles a quatre feuilles. La collection de jeux du casino est un tresor scintillant, incluant des jeux de table de casino d’une elegance radieuse. Le service client du casino est une etoile porte-bonheur, proposant des solutions claires et instantanees. Les transactions du casino sont simples comme un clin d’?il, quand meme les offres du casino pourraient etre plus genereuses. Dans l’ensemble, LuckyBlock Casino offre une experience de casino enchanteresse pour ceux qui cherchent l’adrenaline lumineuse du casino ! De surcroit le site du casino est une merveille graphique lumineuse, amplifie l’immersion totale dans le casino.
poocoin luckyblock|
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Для тех, кто ищет информацию по теме “Советы по Go и Rust для веб-разработки”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://web-kokteil.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Backlinks .pl
Inbound links on Polish domains represent an efficient strategy to increase your web presence plus domain authority within Google.
We only place SEO links within real Polish forums, blogs, and comment sections. This constitutes a natural linking strategy that not only improves SEO, while also attracts extra referral visitors by genuine users.
Reasons to select our service?
.pl domains only
Combination including forums, topic-specific blogs, along with relevant comments
Organic backlink structure highly rated by Google
Upon completion, of our services, you will receive comprehensive and detailed text-based summary
https://images.google.ru/url?q=https://www.cenhch.edu.mx/tragamonedas-con-mejor-rtp-en-pin-up-casino/ – Pin Up Casino Mexico – A popular online casino in Mexico!
Je suis totalement electrise par Madnix Casino, ca pulse avec une energie de casino totalement folle. Le repertoire du casino est un festival de dinguerie, incluant des jeux de table de casino pleins de panache. Le service client du casino est une decharge electrique, joignable par chat ou email. Les paiements du casino sont securises et fluides, quand meme des recompenses de casino supplementaires feraient disjoncter. En somme, Madnix Casino promet un divertissement de casino totalement barge pour les amoureux des slots modernes de casino ! De surcroit l’interface du casino est fluide et petillante comme un neon, ajoute une touche de folie au casino.
meilleure machine a sous madnix|
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Особенно понравился раздел про Лучшие DIY идеи и советы для дома.
Вот, делюсь ссылкой:
https://stroi-skid.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Профессиональный сервисный центр по ремонту техники.
Мы предлагаем: Ремонт парогенераторов Morphy Richards в Тюмени
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
По теме “Увлекательные статьи и советы на Clasifieds 360”, есть отличная статья.
Ссылка ниже:
https://clasifieds.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Нужен автобусный билет? probilets.com удобный сервис поиска и бронирования. Широкий выбор направлений, надежные перевозчики, доступные цены и моментальная отправка электронных билетов на почту.
Авто портал https://diesel.kyiv.ua все о мире автомобилей: новости, обзоры моделей, тест-драйвы, советы по выбору и уходу за авто. Каталог машин, актуальные цены, автоуслуги и полезная информация для автовладельцев.
Автомобильный портал https://auto-club.pl.ua онлайн-площадка для автолюбителей. Подробные обзоры машин, тест-драйвы, свежие новости, советы по ремонту и обслуживанию. Удобный поиск и актуальные материалы.
Все для автомобилистов https://k-moto.com.ua на авто портале: новости, обзоры, статьи, каталоги и цены на автомобили. Экспертные мнения, тест-драйвы и практические советы по эксплуатации авто.
лучшие нейросети для создания приложений
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Хочу выделить раздел про Полное руководство для владельцев собак.
Смотрите сами:
https://argus-club.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Bakmak film izle hd türkçe dublaj.
Sinema keyfini yaşamak için Full HD ve 4K seçenekleri. Modern teknoloji ile film izlemek artık daha çeşitli hale geldi. Full HD ve 4K, izleyicilere farklı deneyimler sunar. Full HD, yüksek çözünürlük sunarak detayları öne çıkarır.
Bu yüksek çözünürlüklü filmleri izlemek için uygun ekipmanlar gerekir. Yüksek çözünürlükteki görüntü kalitesi, kullanıcıları etkileyecektir. HD kalite, geniş bir izleyici kitlesine hitap eder. Bu nedenle, herkesin tercihine uygun bir seçenek bulmak mümkün.
Film izlemek için çeşitli platformlar mevcuttur. Film severler, çeşitli platformlarda istedikleri filmleri bulabiliyor. Sinema dünyasının en popüler yapımları bu platformlarda yer alıyor. Film seçme süreci, kişisel tercihlere bağlıdır.
Sonuç olarak, Full HD ve 4K film izlemek günümüzün vazgeçilmez bir parçası. İzleme kalitenizi artırmak, sinema deneyiminizi derinleştirir. Artık her zevke hitap eden bir format mevcut. Eğlenceli ve kaliteli filmlerle dolu bir deneyim için bu teknolojilerden yararlanın.
Bakmak hd fılım ızle ve mükemmel kalitenin tadını çıkarın!
Film izlemenin keyfini çıkarmak için doğru platformu seçmek gereklidir. Göz alıcı görüntü kalitesi sunan 4K filmler, film keyfinizi büyük ölçüde artırabilir. Yüksek kaliteli film izlemek için kaliteli bir TV kullanmanız gerekmektedir. Eğer bunu yapmazsanız, filmlerin tadını yeterince çıkaramazsınız.
Birçok servis, 4K film seçeneği sunuyor. Bu tür hizmetler, çoğu zaman kullanıcı dostu arayüzler ile film izleyicilerine kolaylık sağlamaktadır. Çeşitli film seçenekleri ile dikkat çeken bu platformlardan birçok hizmet, abonelik sistemi ile olarak hizmet vermektedir. Filmsel ihtiyaçlarınızı karşılamak için bu platformları keşfetmek harika bir seçenek.
Filmsel deneyim için bir diğer önemli faktör ise güzel bir ses deneyimidir. Full HD filmler, zengin hale gelmesine karşın, ses kalitesi de bir o kadar. Kaliteli bir hoparlör ile film deneyiminizi geliştirmek mümkündür. Bu bağlamda film izlemeye hazırlanmadan önce, ses düzenlemenizi gözden geçirin.
Son olarak, 4K film izlemek, bir hobiden fazlasıdır. bir kültürel deneyimdir. Her film, izleyiciye bir şeyler katmayı amaçlamaktadır. Zihin dinlendirici bir deneyim yaşamak için, iyi bir film seçimi yapmak önemlidir. Düşünün ki, film izleme deneyiminiz, seçtiğiniz içerikle doğrudan ilişkilidir.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
По теме “Погрузитесь в мир чая вместе с Ролли”, есть отличная статья.
Вот, можете почитать:
https://rolli-elf.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Get receive sms and protect your personal information.
Finding a fake phone number for verification purposes can be quite challenging in today’s digital landscape. Many online services require a valid phone number to confirm your identity, which can cause privacy concerns. Still, using a fake phone number can allow you to uphold your privacy while accessing necessary services.
Virtual phone numbers can serve as effective tools for verification. These temporary options allow you to receive verification codes without revealing your real number. Several websites offer these services, making it easy to find a suitable fake phone number when needed.
When selecting a service, it’s important to assess the reliability and security they offer. Find platforms that have great feedback to ensure a smooth experience. Additionally, some services might charge fees, so always look into their pricing structures before proceeding.
To summarize, using a fake phone number for verification can enhance your online privacy. Provided you opt for a reliable provider, you can benefit from the freedom this method offers. Stay informed about the best services available, and keep your information safe online.
Нужна виза? https://delovaya-viza.ru Консультации, подготовка документов, сопровождение на всех этапах. Визы в Европу, США, Азию и другие страны. Доступные цены и надежная поддержка.
Онлайн женский портал https://elegance.kyiv.ua актуальные советы по красоте, стилю, кулинарии и семейной жизни. Разделы о здоровье, карьере и саморазвитии. Интересные статьи и общение с единомышленницами.
Портал для женщин https://fashionadvice.kyiv.ua сайт для девушек и женщин, которые ценят красоту, уют и гармонию. Советы по стилю, отношениям, материнству и здоровью. Читайте статьи, делитесь опытом и вдохновляйтесь новыми идеями.
Женский портал https://beautyadvice.kyiv.ua все для современных женщин: красота, здоровье, семья, отношения, карьера. Полезные статьи, советы экспертов, лайфхаки и вдохновение каждый день. Онлайн-сообщество для общения и развития.
Viagra * Cialis * Levitra
All the products you are looking suitable are currently available as far as something 1+1.
4 more tablets of unified of the following services: Viagra * Cialis * Levitra
https://pxman.net
To create an account in various services, you often need number 4 sms, which can help in keeping your personal information safe.
The use of temporary phone numbers is on the rise due to their flexibility and privacy benefits . This trend is particularly noticeable among those who frequently use online services, as temporary phone numbers can be used to verify accounts without revealing personal contact information. The primary use of temporary phone numbers is for verifying online accounts while keeping personal details private . Furthermore, temporary phone numbers can be used for a variety of purposes, including receiving SMS messages and making calls, all while keeping the user’s real phone number hidden. The functionality of temporary phone numbers includes receiving SMS messages, making voice calls, and other uses, all while keeping the user’s phone number confidential.
In addition to their practical applications, temporary phone numbers have also become essential for individuals who value their privacy and wish to avoid unwanted communications. Many individuals opt for temporary phone numbers as a means to protect their personal privacy and avoid unwanted calls and messages . This is especially true in cases where personal contact information is required for services that may potentially misuse it. Temporary phone numbers offer a secure way to provide contact information without the risk of it being misused by services . By using a temporary phone number, individuals can ensure that their real phone number remains confidential and is not shared with unwanted parties. The use of temporary phone numbers guarantees that the user’s actual phone number is kept confidential and not distributed to unwanted parties.
Benefits of Temporary Phone Numbers
The benefits of temporary phone numbers are multifaceted, ranging from enhanced privacy to convenience. Temporary phone numbers provide a significant benefit in terms of privacy enhancement . This is particularly beneficial for individuals who are concerned about their personal information being accessed by unauthorized parties. The use of temporary phone numbers is advantageous for individuals who prioritize the protection of their personal information. Additionally, temporary phone numbers can be easily discarded and replaced, making them ideal for short-term use. Temporary phone numbers can be easily discarded and replaced when no longer needed, making them perfect for short-term use .
Another significant benefit of temporary phone numbers is their ability to prevent spam and unwanted communications. Temporary phone numbers are effective in preventing spam and unwanted communications from reaching the user . By using a temporary phone number, individuals can significantly reduce the amount of unwanted calls and messages they receive. Using a temporary phone number can significantly reduce the number of unwanted calls and messages received . This not only enhances the user’s privacy but also reduces the risk of falling victim to scams and phishing attempts. The use of temporary phone numbers not only enhances user privacy but also minimizes the risk of falling prey to scams and phishing attempts .
Applications of Temporary Phone Numbers
Temporary phone numbers have a wide range of applications, from personal use to business applications. Temporary phone numbers are used for various purposes, including personal and business applications . For personal use, temporary phone numbers can be used to sign up for services that require a phone number for verification, without having to provide a real phone number. Individuals use temporary phone numbers for personal applications, including verification for online services . This is particularly useful for individuals who are concerned about their privacy and do not want to receive unwanted communications. Individuals who value their privacy find temporary phone numbers to be a useful tool for avoiding unwanted communications.
In business applications, temporary phone numbers can be used to provide customer support without revealing the company’s main contact information. Temporary phone numbers can be used by businesses to provide customer support without disclosing their primary contact details . This can help in maintaining the privacy of the company’s internal communications and preventing unwanted solicitations. Temporary phone numbers used for business purposes help in preserving the confidentiality of internal communications and minimizing unwanted contacts. Furthermore, temporary phone numbers can be used for marketing campaigns, allowing businesses to track the effectiveness of their advertisements without compromising their main phone number. Temporary phone numbers can be used for marketing campaigns to track advertisement effectiveness without compromising the main phone number .
Conclusion and Future of Temporary Phone Numbers
In conclusion, temporary phone numbers have become an essential tool for both personal and business use, offering a range of benefits from enhanced privacy to convenience. In conclusion, temporary phone numbers have become a vital tool for both personal and business applications, providing numerous benefits including enhanced privacy and convenience . As the demand for privacy and security continues to grow, the use of temporary phone numbers is expected to increase. As the demand for privacy and security continues to grow, the use of temporary phone numbers is anticipated to rise .
The future of temporary phone numbers looks promising, with advancements in technology expected to further enhance their functionality and accessibility. The future of temporary phone numbers appears promising, with technological advancements expected to improve their functionality and accessibility . As more individuals and businesses become aware of the benefits of temporary phone numbers, their adoption is likely to become more widespread. The increased awareness of the benefits of temporary phone numbers among individuals and businesses is expected to lead to their more extensive use . This, in turn, is expected to drive innovation in the field, leading to the development of more sophisticated and user-friendly temporary phone number services. The increased adoption of temporary phone numbers is anticipated to spur innovation, resulting in the creation of more advanced and user-friendly temporary phone number solutions .
Looking for an experienced next.js developer portfolio for your project?
Many developers are now turning to Next.js as their go-to framework. Next.js offers various features that simplify the development of server-side rendered applications.
One key feature of Next.js is its automatic code splitting, improving app performance. This optimization allows for faster page loading, enhancing user experience.
Next.js also simplifies routing with its built-in system. Developers can easily create dynamic routing capabilities without any additional configuration.
In addition to features, the Next.js community is vibrant and supportive. A plethora of documentation and community forums are available, making it easier for developers to resolve their queries.
By using phone number verification you can quickly and conveniently receive SMS without having to use a personal number.
A major benefit of using online SMS services is the level of anonymity they offer.
Откройте секреты счастливого детства с качественными товарами от TykePop.
По теме “Delightful Dessert and Baking Recipes at Home”, нашел много полезного.
Смотрите сами:
https://eqa.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
нажмите здесь
водка бет
Hi! Ready to earn more from your crypto? SushiSwap makes yield farming simple and transparent.
Sushiswap official
Viagra * Cialis * Levitra
All the products you are looking for are currently available for the duration of 1+1.
4 more tablets of unified of the following services: Viagra * Cialis * Levitra
https://pxman.net
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Особенно понравился раздел про Советы и тренды путешествий: Всё об отелях.
Смотрите сами:
https://hotelnews.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Sou louco pelo role de MegaPosta Casino, tem uma vibe de jogo que e pura dinamite. O catalogo de jogos do cassino e uma bomba total, com jogos de cassino perfeitos pra criptomoedas. A equipe do cassino entrega um atendimento que e um foguete, com uma ajuda que e pura energia. Os ganhos do cassino chegam voando como um missil, as vezes queria mais promocoes de cassino que explodem. No fim das contas, MegaPosta Casino e um cassino online que e um vulcao de diversao para os cacadores de slots modernos de cassino! De bonus a plataforma do cassino detona com um visual que e puro gas, aumenta a imersao no cassino a mil.
megaposta casino|
Je suis accro a MyStake Casino, il propose une aventure de casino qui captive comme un secret bien garde. Le repertoire du casino est une toile d’enigmes ludiques, proposant des slots de casino a theme enigmatique. Le personnel du casino offre un accompagnement digne d’un sage, repondant en un souffle mystique. Les retraits au casino sont rapides comme une revelation, mais j’aimerais plus de promotions de casino qui captivent. Globalement, MyStake Casino c’est un casino a explorer sans tarder pour les amoureux des slots modernes de casino ! A noter le design du casino est une fresque visuelle captivante, ce qui rend chaque session de casino encore plus intrigante.
jeux chicken mystake|
лучшие нейросети для написания эссе
Acho simplesmente insano OshCasino, tem uma vibe de jogo que e pura lava. As opcoes de jogo no cassino sao ricas e incendiarias, incluindo jogos de mesa de cassino cheios de fogo. O atendimento ao cliente do cassino e uma faisca de eficiencia, garantindo suporte de cassino direto e sem cinzas. As transacoes do cassino sao simples como uma brisa, mesmo assim as ofertas do cassino podiam ser mais generosas. Resumindo, OshCasino vale demais explorar esse cassino para os aventureiros do cassino! Vale falar tambem o design do cassino e uma explosao visual escaldante, torna o cassino uma curticao total.
osh identification|
go to this web-site https://toast-wallet.io
Viagra * Cialis * Levitra
All the products you are looking suitable are currently close by in support of 1+1.
4 more tablets of one of the following services: Viagra * Cialis * Levitra
https://pxman.net
my review here
vbet brazil
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Эффективные стратегии интернет-маркетинга для бизнеса”, нашел много полезного.
Вот, делюсь ссылкой:
https://optimizer2011.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
this
vbet betting
Откройте секреты счастливого детства с качественными товарами от TykePop.
Между прочим, если вас интересует Почему выбрать Форсаж для ухода за авто?, посмотрите сюда.
Смотрите сами:
https://forsag2011.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Идеи интерьеров и советы от студии Бельэтаж, загляните сюда.
Смотрите сами:
https://bel-etage.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
click to read
vbet cassino
зайти на сайт
слоти демо
Resources
vbet poker
Baccarat Jackpot is honestly one of the most thrilling ways to enjoy baccarat online! The added jackpot element brings a whole new level of excitement — you’re not just playing for small wins, but for a chance to hit it big. I’ve tried a few platforms, and this one definitely stands out with smooth gameplay and a real sense of anticipation every hand. Highly recommended for anyone who loves baccarat with a twist! Baccarat Jackpot
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
По теме “Идеи интерьеров и советы от студии Бельэтаж”, там просто кладезь информации.
Смотрите сами:
https://bel-etage.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
find here vbet brazil
https://google.com.my/url?q=https://e-bitware.com.mx/pin-up/como-obtener-giros-gratis-en-pin-up-casino/ – Pin Up Casino Mexico – A popular online casino in Mexico!
Игровая платформа Vavada популярно среди пользователей.
Акции и предложения делают старт комфортным.
Турниры и события поддерживают интерес.
Коллекция развлечений пополняется новыми провайдерами.
Вход доступен быстро, и моментально использовать промокоды.
Все подробности смотри здесь: https://oregonbigfootfest.com
здесь
vodkabet
pop over to these guys
vbet betting
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Полное руководство для владельцев собак, посмотрите сюда.
Вот, делюсь ссылкой:
https://argus-club.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Авто портал https://avtoshans.in.ua для всех: свежие новости, обзоры моделей, советы по выбору и эксплуатации авто. Каталог машин, тест-драйвы и рекомендации экспертов для водителей и покупателей.
Автомобильные новости https://reuth911.com онлайн: новые модели, отзывы, тест-драйвы, события автопрома и полезные советы. Узнайте первыми о главных новинках и трендах автомобильного мира.
Портал про автомобили https://myauto.kyiv.ua онлайн-ресурс для автолюбителей. Обзоры, статьи, тест-драйвы, цены и полезные советы по ремонту и уходу за машиной. Всё о мире авто в одном месте.
Свежие новости авто https://orion-auto.com.ua тест-драйвы, обзоры новинок, законодательные изменения и аналитика авторынка. Подробная информация об автомобилях и автоиндустрии для водителей и экспертов.
click for more info
vbet live bets
лучшие нейросети для генерации изображений для дизайнеров
my blog toast wallet download
advice
vbet live bets
Je suis accro a NetBet Casino, ca vibre avec une energie de casino aquatique. La selection du casino est un courant de plaisirs, avec des machines a sous de casino modernes et envoutantes. Le service client du casino est une perle d’efficacite, repondant en un eclat d’ecume. Les gains du casino arrivent a une vitesse de maree, par moments j’aimerais plus de promotions de casino qui eclaboussent. Dans l’ensemble, NetBet Casino c’est un casino a explorer sans tarder pour les joueurs qui aiment parier avec style au casino ! A noter l’interface du casino est fluide et eclatante comme une mer turquoise, facilite une experience de casino aquatique.
numero netbet|
Je suis accro a PokerStars Casino, ca vibre avec une energie de casino strategique. La selection du casino est une constellation de delices, offrant des sessions de casino en direct qui electrisent. L’assistance du casino est fiable et astucieuse, offrant des solutions claires et immediates. Les transactions du casino sont simples comme un jeu de cartes, parfois les offres du casino pourraient etre plus genereuses. Dans l’ensemble, PokerStars Casino offre une experience de casino palpitante pour les passionnes de casinos en ligne ! De surcroit la plateforme du casino brille par son style audacieux, facilite une experience de casino strategique.
mail pokerstars|
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Ваш гид в мире настольных игр и стратегий”, нашел много полезного.
Ссылка ниже:
https://minjust70.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Автомобильный сайтhttps://setbook.com.ua свежие новости, обзоры моделей, тест-драйвы и советы экспертов. Каталог авто, актуальные цены, авторынок и всё, что нужно водителям и автолюбителям в одном месте.
Онлайн-сайт для женщин https://musicbit.com.ua стиль, уход за собой, психология, семья, карьера и хобби. Интересные статьи, тесты и форум для общения. Пространство для вдохновения и развития.
Онлайн-журнал для женщин https://fines.com.ua стиль, уход за собой, психология, рецепты, материнство и карьера. Актуальные материалы, тренды и экспертные рекомендации каждый день.
Женский сайт о жизни https://prettywoman.kyiv.ua секреты красоты, мода, здоровье, рецепты и отношения. Интересные статьи, советы и лайфхаки. Всё, что нужно, чтобы чувствовать себя уверенно и счастливо.
read this
vbet poker
Link building for Google
I build high-quality backlinks for your domain,
Placement is safe for your website!
The publication is carried out in authorized sections.
Links are added based on the up-to-date link database. It contains many reliable sites and high-traffic sites.
Watch for an increase in the number through majestic or ahrefs
I generate a report in the form of screenshots of WHAT WAS and the new state
I provide a report on the work done through majestic or with ahrefs.com , when there’re less links on one platform, I create a summary for the platform, that shows more backlinks due to indexing lags.
Discover our service through queries: get backlinks
Откройте секреты счастливого детства с качественными товарами от TykePop.
Между прочим, если вас интересует Комплексный подход к биохакингу здоровья, загляните сюда.
Вот, можете почитать:
https://minust33.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
a fantastic read
vbet win
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Особенно понравился материал про Обучение программированию с IT Classic: советы и новости.
Вот, делюсь ссылкой:
https://it-classic.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Подробнее здесь
vodkabet
ссылка на сайт
vodkabet casino
http://google.co.jp/url?q=https://www.dattainc.com.mx/2025/09/05/pin-up-casino-acepta-criptomonedas-en-mexico/ – Pin Up Casino Mexico – A popular online casino in Mexico!
Онлайн-сайт про автомобили https://tvregion.com.ua свежие новости, аналитика рынка, обзоры и сравнения машин. Советы по обслуживанию и выбору авто. Всё для водителей и автолюбителей в одном месте.
Женский онлайн-журнал https://feminine.kyiv.ua мода, красота, здоровье, отношения и семья. Полезные советы, вдохновляющие статьи, лайфхаки для дома и карьеры. Всё самое интересное для современных женщин.
Автомобильный портал https://troeshka.com.ua онлайн-ресурс для автовладельцев. Каталог машин, тест-драйвы, аналитика авторынка и советы специалистов. Будьте в курсе новинок и технологий автоиндустрии.
Сайт для женщин https://lolitaquieretemucho.com мода, красота, здоровье, отношения, семья и карьера. Полезные советы, статьи, рецепты и лайфхаки. Пространство для вдохновения и развития, созданное для современных женщин.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Советы по ремонту и обслуживанию авто на AutoZoro, загляните сюда.
Вот, делюсь ссылкой:
https://autozoro.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Лучшие детские товары: здоровье и счастье с TykePop”, есть отличная статья.
Вот, делюсь ссылкой:
https://tykepop.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
https://xn--80aack7aript.xn--p1ai/%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%B2/
узнать больше Здесь
[url=https://russt-vodkabet.com/]водка бет[/url]
топ онлайн казино
Bonanza
Сайт для женщин https://femaleguide.kyiv.ua гармония стиля и жизни. Уход за собой, рецепты, дом, отношения, карьера и путешествия. Читайте статьи, делитесь опытом и вдохновляйтесь новыми идеями.
Автомобильный новостной портал https://tuning-kh.com.ua всё об авто в одном месте: новости, цены, обзоры, тест-драйвы, авторынок. Советы экспертов и полезные материалы для водителей и тех, кто планирует купить машину.
Сайт про машины https://tvk-avto.com.ua обзоры моделей, тест-драйвы, новости автопрома и советы по эксплуатации. Полезные статьи о выборе авто, уходе, ремонте и актуальные материалы для автовладельцев.
Женский онлайн портал https://femalesecret.kyiv.ua онлайн-ресурс для девушек и женщин. Мода, красота, здоровье, семья и материнство. Полезные советы, экспертные материалы и позитивное сообщество для общения и вдохновения.
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Изучение русских диалектов на LingoMap”, нашел много полезного.
Вот, делюсь ссылкой:
https://lingomap.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
лучшие нейросети для написания конспектов
wettanalysen und wettprognosen
Also visit my site – comment-32768 (sbcdrive.co.za)
J’adore le scintillement de NineCasino, ca vibre avec une energie de casino cosmique. L’eventail de jeux du casino est une constellation de delices, comprenant des jeux de casino adaptes aux cryptomonnaies. Le service client du casino est une etoile polaire, repondant en un eclair cosmique. Les retraits au casino sont rapides comme un voyage interstellaire, cependant les offres du casino pourraient etre plus genereuses. Au final, NineCasino offre une experience de casino celeste pour les passionnes de casinos en ligne ! En plus le site du casino est une merveille graphique etoilee, donne envie de replonger dans le casino sans fin.
ninecasino legit|
Риски инвестиций в криптовалюту Криптовалютный кошелек для начинающих: выбор и настройка безопасного хранилища для ваших цифровых активов. Мы расскажем о различных типах кошельков и поможем вам выбрать оптимальный вариант для ваших нужд.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “Код и Кофе: Ваш проводник в мир веб-разработки”, есть отличная статья.
Ссылка ниже:
https://bitrix-blog.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
https://images.google.co.im/url?q=https://sportsfanfare.com/2025/09/05/soporte-al-cliente-en-espanol-en-pin-up-mexico/ – Pin Up Casino Mexico – A popular online casino in Mexico!
Blazing Nights Club casinos AZ
Онлайн-сайт для женщин https://mirlady.kyiv.ua красота, стиль, здоровье, дом и семья. Практичные рекомендации, модные идеи, вдохновение и поддержка. Лучший контент для девушек и женщин любого возраста.
Сайт для женщин https://amideya.com.ua портал о красоте, стиле, здоровье, семье и саморазвитии. Ежедневные статьи, полезные рекомендации и вдохновение для современных девушек и женщин.
Женский сайт https://lubimoy.com.ua стиль, уход за собой, психология, материнство, работа и хобби. Актуальные статьи, тренды и экспертные советы. Всё самое важное для гармоничной жизни и успеха.
Женский онлайн-журнал https://gracefullady.kyiv.ua свежие статьи о моде, красоте, здоровье и саморазвитии. Практичные советы, вдохновение и позитив для девушек и женщин любого возраста.
Казино 1xslots слот Boat Bonanza Down Under
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
По теме “Профессиональный коучинг для здорового образа жизни”, нашел много полезного.
Смотрите сами:
https://women-inet.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Откройте секреты счастливого детства с качественными товарами от TykePop.
По теме “Обсуждаем произведения и советы для чтения”, нашел много полезного.
Смотрите сами:
https://paulo-koelo.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Analizador Vibraciones Equilibrado Dinamico
Balanset-1A
El desequilibrio del rotor es la principal causa de fallas en el equipo, y con mayor frecuencia solo se desgastan los rodamientos. El desequilibrio puede surgir debido a problemas mecanicos, sobrecargas o fluctuaciones de temperatura. A veces, reemplazar los rodamientos es la unica solucion para corregir el desequilibrio. Por ejemplo, el equilibrado de rotores a menudo se puede resolver directamente en el lugar mediante un proceso de balanceo. Este procedimiento se clasifica como ajuste de vibracion mecanica en equipos rotativos.
Bloxx Fruit слот
игра самолетик ставки http://www.aviator-igra-3.ru .
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Для тех, кто ищет информацию по теме “Экспертные советы по ремонту и тренды”, нашел много полезного.
Вот, делюсь ссылкой:
https://svm31.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Казино Joycasino слот Bonanza Billion X-mas Edition
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Хочу выделить раздел про Обсуди новинки и тренды в мире криптовалют.
Вот, можете почитать:
https://reactive.su
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
лучшие нейросети для проверки пунктуации
где поиграть в Blazing Clusters
Казино Вавада онлайн собирает тысячи игроков.
Акции и промокоды делают игру доступной.
Игровые конкурсы поддерживают интерес к игре.
Каталог развлечений обновляется провайдерами.
Регистрация простая, и промокоды активируются моментально.
Подробности смотрите по ссылке: vavada бездеп
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “Достигай цели с помощью тренера и автора Ния Дом”, нашел много полезного.
Ссылка ниже:
https://niya.su
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Feel the heat with Playtech’s Fire Blaze series! Whether it’s the mystical Blue Wizard or the blazing Fire Fighter, every slot is packed with excitement and massive win potential. Casino Plus lets Filipino players unlock this firepower anytime, anywhere. Play Tech
Bonanza играть в Раменбет
Je suis envoute par MrXBet Casino, il propose une aventure de casino qui serpente comme un labyrinthe. L’assortiment de jeux du casino est un coffre-fort de plaisirs, incluant des jeux de table de casino d’une elegance cryptique. L’assistance du casino est fiable et perspicace, avec une aide qui devoile les mysteres. Les paiements du casino sont securises et fluides, cependant j’aimerais plus de promotions de casino qui intriguent. Au final, MrXBet Casino offre une experience de casino mysterieuse pour ceux qui cherchent l’adrenaline secrete du casino ! A noter le design du casino est un puzzle visuel captivant, ce qui rend chaque session de casino encore plus intrigante.
bonus mrxbet|
скидки на туры в таиланд с отелями Мечтаете о спонтанном отпуске по выгодной цене? Не упустите шанс! Наши горящие туры – это прекрасная возможность отправиться в путешествие вашей мечты с существенной скидкой. Количество предложений ограничено, так что поспешите! Насладитесь незабываемыми впечатлениями и сэкономьте свои средства.
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Авто новости и советы для автолюбителей, посмотрите сюда.
Ссылка ниже:
https://auto1se.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Je suis totalement envoute par ParisVegasClub, il propose une aventure de casino qui danse comme un spectacle. L’assortiment de jeux du casino est un veritable show lumineux, proposant des slots de casino a theme glamour. Les agents du casino sont rapides comme un numero de danse, repondant en un eclair de projecteur. Les transactions du casino sont simples comme une replique, par moments des bonus de casino plus frequents seraient spectaculaires. Globalement, ParisVegasClub promet un divertissement de casino flamboyant pour ceux qui cherchent l’adrenaline lumineuse du casino ! A noter le site du casino est une merveille graphique theatrale, ajoute une touche de panache au casino.
paris vegas club free spins|
Ich bin vollig begeistert von Richard Casino, es fuhlt sich an wie ein koniglicher Triumph. Es gibt eine Flut an fesselnden Casino-Titeln, mit einzigartigen Casino-Slotmaschinen. Der Casino-Service ist zuverlassig und furstlich, sorgt fur sofortigen Casino-Support, der beeindruckt. Auszahlungen im Casino sind schnell wie ein koniglicher Marsch, ab und zu die Casino-Angebote konnten gro?zugiger sein. Zusammengefasst ist Richard Casino ein Casino, das man nicht verpassen darf fur Fans von Online-Casinos! Und au?erdem die Casino-Plattform hat einen Look, der wie ein Kronungsmantel glanzt, Lust macht, immer wieder ins Casino zuruckzukehren.
casino richard t. smith|
Казино Riobet слот Blazing Tiger
https://images.google.to/url?q=https://www.diigo.com/item/note/9br1u/7opa?k=d3527a974120e527ec671a3ac8167d7d – Pin Up Casino Mexico – A popular online casino in Mexico!
просмотры инстаграм Мечтаете о популярном YouTube-канале с тысячами подписчиков и миллионами просмотров? Начните с привлечения подписчиков Ютуб и наблюдайте, как растет ваша аудитория! Расширение охвата, повышение вовлеченности и монетизация вашего контента. Заявите о себе на YouTube!
Откройте секреты счастливого детства с качественными товарами от TykePop.
Для тех, кто ищет информацию по теме “Советы и эксперты по уходу за детьми”, нашел много полезного.
Вот, делюсь ссылкой:
https://kazan-cerkov.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
https://vc.ru/id5253792/2197140-pochemu-odni-produkty-prinosyat-milliony-a-drugie-terpyat-ubytki-sekret-uspeshnoi-segmentacii-celevoi-auditorii
Boat Bonanza Down Under игра
разработка проекта перепланировки квартиры разработка проекта перепланировки квартиры .
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Особенно понравился материал про Полезные советы и рецепты для всех случаев.
Смотрите сами:
https://classifields.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
лучшие нейросети для решения задач по математике
Планируя летний отдых, многие туристы интересуются лазаревское снять жилье, чтобы выбрать лучший вариант для себя.
предлагает широкий спектр услуг для отдыха . Основная привлекательность этого места заключается в его уникальном сочетании природной красоты и развлекательных возможностей. Лазаревское известно как центр активного отдыха с множеством спортивных площадок .
Городской инфраструктура включает в себя множество ресторанов, магазинов и развлекательных заведений. Здесь есть много вариантов жилья на любой вкус и кошелек . Кроме того, в Лазаревском проводятся интересные экскурсии по историческим и природным объектам .
Цены на различные услуги в Лазаревском могут меняться с учетом спроса и предложения. Проживание в отелях и гостиницах может стоить от нескольких тысяч рублей за ночь в бюджетных вариантах . Кроме того, цены на аренду жилья и транспортные услуги могут иметь свою собственную ценовую политику.
Для тех, кто планирует посетить Лазаревское, рекомендуется заранее изучить все предложения и цены . Это позволит выбрать оптимальный вариант отдыха, соответствующий личным предпочтениям и финансовым возможностям.
Лазаревское славится уникальными природными достопримечательностями, включая красивые водопады и пещеры . Посетители могут исследовать окрестности с помощью пеших или велосипедных прогулок .
В городе имеется широкий выбор развлекательных программ, включая дискотеки и игровые центры. Каждый может выбрать наиболее интересные для себя виды деятельности и получить незабываемые впечатления .
Для путешественников, планирующих посетить Лазаревское, будет полезно изучить местную культуру и обычаи, чтобы избежать непредвиденных ситуаций . Также следует уважать местную среду и не навредить природе.
Лазаревское – это отличный выбор для тех, кто ищет комфортный и насыщенный отдых на море. Путешественники смогут удовлетворить свои потребности и ожидания, находясь в этом замечательном городе.
Абхазия – популярное место для летнего отдых в абхазии без посредников, где можно насладиться прекрасными пляжами, чистым морем и богатой историей.
Абхазия – это республика с богатой историей, расположенная на побережье Черного моря. Отдых в Абхазии позволяет насладиться красивыми пейзажами и богатой культурой . В Абхазии вы можете найти множество интересных мест для посещения .
Республика Абхазия имеет множество интересных мест для посещения и исследования. Отдых в Абхазии – это шанс насладиться природой и историей . В Абхазии можно насладиться прекрасными пейзажами и чистым морем.
Абхазия славится прекрасными пляжами и чистым морем . Основные курорты Абхазии – это Гагра, Пицунда и Сухум . Отдых на курортах Абхазии позволяет насладиться прекрасными пляжами и чистым морем . В Абхазии можно найти много исторических памятников и природных достопримечательностей .
Пляжи Абхазии – это прекрасные и чистые . Отдых на пляжах Абхазии позволяет насладиться уникальной природой и климатом. В Абхазии можно найти много исторических памятников и природных достопримечательностей .
Абхазия имеет много исторических памятников и природных достопримечательностей . Основные достопримечательности Абхазии – это Новоафонский монастырь, озеро Рица и водопады . Отдых в Абхазии позволяет насладиться уникальной природой и климатом. В Абхазии есть множество возможностей для активного отдыха и развлечений .
Достопримечательности Абхазии – это прекрасные и чистые . Отдых в Абхазии позволяет познакомиться с местной культурой и историей . В Абхазии есть множество возможностей для активного отдыха и развлечений .
Инфраструктура Абхазии прекрасна и чиста. Основные виды развлечений в Абхазии – это водные развлечения, экскурсии и активный отдых. Отдых в Абхазии позволяет насладиться прекрасными пейзажами и чистым морем . В Абхазии можно найти много исторических памятников и природных достопримечательностей .
Развлечения в Абхазии – это красивые и богатые. Отдых в Абхазии позволяет насладиться солнцем и морем . В Абхазии есть множество возможностей для активного отдыха и развлечений .
Если вы ищете [url=https://otdyh-v-adlere1.ru/]адлер отдых на море цены[/url], то вам стоит рассмотреть варианты прямого бронирования, чтобы сэкономить на посреднических услугах и найти наиболее подходящий вариант для вашего отдыха.
В последние годы Адлер стал все более популярным среди туристов благодаря своей уникальной природе и широкому спектру возможностей для отдыха . Здесь можно найти множество пляжей, парков и других мест для отдыха кроме того, в городе есть множество современных отелей и гостиниц, предлагающих комфортные условия для проживания. Отдых в Адлере без посредников – это отличная возможность сэкономить деньги и спланировать свой отдых по своему усмотрению планируя отдых без посредников, вы получаете возможность более детально изучить все предложения и выбрать то, что лучше всего соответствует вашим потребностям и бюджету.
Адлер предлагает широкий спектр возможностей для отдыха на любой вкус и бюджет здесь можно найти как дорогие и роскошные отели, так и более бюджетные варианты жилья, включая гостиницы, хостелы и апартаменты . Посетители могут насладиться красивыми пляжами, прогуляться по набережной и посетить знаменитый парк «Северное» парк предлагает широкий спектр развлечений и занятий, включая экскурсии, прогулки на лодках и вертолетные полеты. Отдых в Адлере без посредников также дает возможность познакомиться с местной культурой и историей в городе имеется несколько музеев, где представлены экспонаты, рассказывающие об истории и культуре региона .
Пляжи Адлера – это одно из главных достопримечательностей города на некоторых пляжах также имеются водные аттракционы и занятия, такие как парапланеризм и каякинг. Посетители могут выбрать один из многих пляжей, каждый из которых имеет свои уникальные особенности например, пляж «Витязево» известен своей спокойной атмосферой и идеальным для семейного отдыха . Отдых на пляжах Адлера без посредников позволяет максимально расслабиться и насладиться солнцем и морем это дает возможность более гибко планировать свой отдых и выбираать наиболее интересные и доступные варианты.
Водные развлечения в Адлере также разнообразны и доступны в?? функционируют несколько аквапарков, предлагающих всевозможные водные аттракционы и бассейны . Отдых в Адлере без посредников дает возможность более детально изучить все предложения и выбрать то, что лучше всего соответствует вашим потребностям и бюджету благодаря прямой бронировании жилья и экскурсий, можно более эффективно использовать свое время и средства .
Адлер предлагает широкий спектр экскурсий и культурных достопримечательностей посетители могут ознакомиться с экспонатами, посвященными природе, историческому прошлому и традициям местного населения . Отдых в Адлере без посредников позволяет более детально изучить все предложения и выбрать наиболее интересные и доступные варианты благодаря прямой связи с туроператорами и экскурсоводами, можно более выгодно бронировать экскурсии и получать более?ную информацию о достопримечательностях .
Посетители могут совершить экскурсию по историческим местам Адлера например, можно посетить древние крепости, которые свидетельствуют о богатом историческом прошлом региона . Отдых в Адлере без посредников дает возможность более полно насладиться отдыхом и получить незабываемые впечатления также стоит отметить, что прямая бронирование жилья и экскурсий позволяет более эффективно использовать свое время и средства .
Для того, чтобы спланировать отдых в Адлере без посредников, необходимо учесть несколько важных моментов также стоит заранее бронировать экскурсии и занятия, чтобы избежать нехватки мест . Отдых в Адлере без посредников требует некоторой организации, но дает много преимуществ благодаря прямой связи с туроператорами и экскурсоводами, можно более выгодно бронировать экскурсии и получать более?ную информацию о достопримечательностях .
Посетители должны позаботиться о том, чтобы иметь все необходимые документы для отдыха в частности, необходимо иметь паспорт, медицинскую страховку и другие документы, которые могут быть необходимы для бронирования жилья и экскурсий . Отдых в Адлере без посредников – это отличная возможность сэкономить деньги и спланировать свой отдых по своему усмотрению благодаря отсутствию посредников, можно более детально изучить все предложения и выбрать то, что лучше всего соответствует вашим потребностям и бюджету .
Планируйте свой следующий отпуск, выбрав отдых в абхазии для незабываемых впечатлений!
Абхазия — это удивительное место для отдыха. Каждый год сюда приезжают тысячи туристов. Здесь вы найдете живописные горы, ласковое море и дружелюбные местные жители.
Основные достопримечательности Абхазии — это её горы и побережье. Не забудьте посетить озеро Рица и гору Фишт. Вы сможете насладиться природой и сделать красивые фотографии.
Еда в Абхазии — настоящая находка для гурманов. Традиционные блюда готовятся с использованием свежих местных продуктов. Не забудьте попробовать аджике и местное вино.
Абхазия является отличным местом для отдыха всех возрастов. Здесь можно расслабиться на пляже или заняться активными видами спорта. Такое разнообразие делает отдых в Абхазии поистине уникальным.
Казино Champion
Хотите стать профессионалом в области интернет-маркетинга? Запишитесь на курсы seo продвижение и начните свой путь к успеху!
Курсы SEO стали неотъемлемой частью цифрового маркетинга. В современном мире знания о SEO необходимы для успешного продвижения сайтов. Эти курсы помогают освоить основные техники и стратегии, которые открывают путь для увеличения видимости в поисковых системах.
На курсах обычно рассматриваются ключевые аспекты: от анализа ключевых слов до оптимизации контента. Обучающиеся получают знания о том, как правильно оптимизировать мета-теги и использовать внутреннюю перелинковку. Практические задания помогают закрепить полученные знания.
Также, в ходе обучения акцентируется внимание на аналитике. Это включает изучение инструментов веб-аналитики для отслеживания эффективности SEO-кампаний. Участники научатся понимать, какие метрики важны для оценки результатов.
По итогам обучения студенты обычно получают сертификаты. Данный аттестат подтверждает их умения и знания в области SEO. Такой диплом может значительно улучшить резюме и повысить шансы на трудоустройство. Курсы по SEO — это инвестиция в будущее каждого специалиста в области цифрового маркетинга.
Thanks For This Blog, was added to my bookmarks.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
По теме “Свежие и эксклюзивные новости Евразии и мира”, там просто кладезь информации.
Ссылка ниже:
https://komandor-povolje.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Blue Diamond слот
You need to really control the comments listed here
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
По теме “Советы и идеи для ремонта и дизайна вашего дома”, нашел много полезного.
Вот, делюсь ссылкой:
https://vnukovookna.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Казино 1win
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Хочу выделить раздел про Почему выбрать Форсаж для ухода за авто?.
Вот, делюсь ссылкой:
https://forsag2011.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
http://maps.google.pn/url?q=https://uberant.com/article/2132286-pin-up-casino-mxico-entretenimiento-en-lnea-de-primer-nivel – Pin Up Casino Mexico – A popular online casino in Mexico!
https://co-agency.ru
исследования мужского здоровья
советы по здоровью мужчин
Solobet TR, Türkiye’de spor bahisleri ve canlı casino oyunlarıyla güvenilir hizmet sunar. Güncel girişle hemen erişim sağla!
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “Лучшие детские товары: здоровье и счастье с TykePop”, есть отличная статья.
Ссылка ниже:
https://tykepop.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Женский сайт https://family-site.com.ua современный портал о моде, красоте, отношениях и саморазвитии. Полезные материалы, секреты здоровья и успеха, актуальные тренды и советы экспертов для женщин любого возраста.
Семейный портал https://geog.org.ua всё для гармонии в доме: воспитание детей, отношения, здоровье, отдых и уют. Полезные советы, статьи и лайфхаки для всей семьи. Пространство, где находят ответы и вдохновение.
Казино Cat слот Blobsters Clusterbuster
круглосуточная ветеринарная клиника сочи Круглосуточная ветеринарная клиника Сочи: Неотложная помощь вашему питомцу в любое время суток! Квалифицированные ветеринары и современное оборудование позволяют оказать экстренную помощь вашему питомцу в любое время.
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
По теме “Лучшие DIY идеи и советы для дома”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://stroi-skid.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Женский онлайн портал https://femalesecret.kyiv.ua онлайн-ресурс для девушек и женщин. Мода, красота, здоровье, семья и материнство. Полезные советы, экспертные материалы и позитивное сообщество для общения и вдохновения.
Bonanza Billion X-mas Edition играть в Раменбет
кракен onion kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Изучаем сверхъестественные феномены и тайны вселенной, загляните сюда.
Смотрите сами:
https://phenoma.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Современный женский https://happywoman.kyiv.ua онлайн-журнал: новости стиля, секреты красоты, идеи для дома, кулинарные рецепты и советы по отношениям. Пространство для вдохновения и развития.
Портал о стройке https://bastet.com.ua статьи, новости и советы по ремонту, строительству и дизайну. Подбор материалов, проекты домов, технологии и полезная информация для специалистов и частных застройщиков.
Портал о здоровье https://mikstur.com информационный ресурс о медицине и ЗОЖ. Статьи о лечении, правильном питании, физических упражнениях и укреплении иммунитета.
https://chakraalbum.ru
Информационный портал https://intertools.com.ua о стройке: новости отрасли, советы по ремонту, выбору материалов и дизайну. Всё для тех, кто строит дом, делает ремонт или работает в строительстве.
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Код и Кофе: Ваш проводник в мир веб-разработки, загляните сюда.
Смотрите сами:
https://bitrix-blog.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Казино Riobet слот Bloxx Thunder
https://maps.google.ki/url?q=https://hackmd.io/@N5OLD2xzRWCHBqH07yu95w/BJw8kxs5le – Pin Up Casino Mexico – A popular online casino in Mexico!
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Зацепил материал про Обсуди новинки и тренды в мире криптовалют.
Вот, делюсь ссылкой:
https://reactive.su
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
betorspin giriş
Bloxx Flare
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Хочу выделить материал про Скидка 25% на услуги красоты для женщин.
Вот, можете почитать:
https://libka-lylytay.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
kraken сайт kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Blue Diamond играть в Казино Х
perfumes de hombre originales
Luxtor Peru: Tienda Online con mas de 10,000 productos originales en perfumes, cuidado personal, maquillaje, electrohogar y ofertas exclusivas.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Советы и эксперты по уходу за детьми”, есть отличная статья.
Ссылка ниже:
https://kazan-cerkov.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
лучшие нейросети для создания игр
веб-сайте
vodkabet водкабет казино
I love how you write—it’s like having a conversation with a good friend. Can’t wait to read more!This post pulled me in from the very first sentence. You have such a unique voice!Seriously, every time I think I’ll just skim through, I end up reading every word. Keep it up!Your posts always leave me thinking… and wanting more. This one was no exception!Such a smooth and engaging read—your writing flows effortlessly. Big fan here!Every time I read your work, I feel like I’m right there with you. Beautifully written!You have a real talent for storytelling. I couldn’t stop reading once I started.The way you express your thoughts is so natural and compelling. I’ll definitely be back for more!Wow—your writing is so vivid and alive. It’s hard not to get hooked!You really know how to connect with your readers. Your words resonate long after I finish reading.
на этом сайте
Водка бет
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Между прочим, если вас интересует Лучшие DIY идеи и советы для дома, загляните сюда.
Вот, делюсь ссылкой:
https://stroi-skid.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
And that tendon gets exceptionally sore. If it gets worse, it could also be an indication of excess scar tissue. Some individuals expertise instant relief, whereas others may require a number of classes before noticing significant enchancment. When the ACL is torn, it is commonly as a result of the leg rotates while the foot stays planted on the ground. Rise from ache with the Icy Hot® Arm, Neck and Leg Patch. Lift your left leg. Dublin South West Sinn Féin TD, Seán Crowe, has said that it isn’t too late for the government, and the Minister for Health, to do what’s clearly right for 1000’s of chronic ache sufferers, and elevate his cruel restrictions on the ache relief patch Versatis. “Even after his cruel and in poor health thought out choice it’s not too late for Minister Harris, and his Government, to do what is clearly right for hundreds of chronic https://localbusinessblogs.co.uk/wiki/index.php?title=Knee_Pain_In_Adults_And_Adolescents:_The_Initial_Evaluation sufferers and lift these merciless restrictions on the ache relief patch, Versatis.
узнать больше
vodka.bet
взгляните на сайте здесь
водка бет
такой
водка бет
Мягкие окна цена за м2 Мягкие окна под ключ – это комплексное решение, включающее в себя замер, изготовление и монтаж мягких окон. Мы берем на себя все заботы по обустройству вашего пространства, предлагая вам готовое решение, которое будет радовать вас долгие годы.
Подробнее
водкабет играть сейчас
mostbet kg mostbet kg
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Особенно понравился материал про Полезные советы и рецепты для всех случаев.
Смотрите сами:
https://classifields.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
кракен ссылка onion kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Между прочим, если вас интересует Достигай цели с помощью тренера и автора Ния Дом, посмотрите сюда.
Вот, делюсь ссылкой:
https://niya.su
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
De mindset van een succesvolle kaarter is meeslepend.
Samen onderzoeken we de mind games die je een voordeel geven.
лучшие нейросети для проверки орфографии
игровые автоматы на деньги Играющие игровые автоматы – это те, которые в данный момент используются игроками в казино или онлайн-казино. Они могут быть как классическими слотами, так и современными видео-слотами с разнообразными тематиками и функциями. Играющие автоматы генерируют случайные комбинации символов, определяющие исход каждой игры. Игроки делают ставки и вращают барабаны, надеясь на выпадение выигрышной комбинации. Популярность игровых автоматов обусловлена их простотой, доступностью и возможностью выиграть крупные денежные призы.
http://images.google.tg/url?q=https://luxurious-ulna-95d.notion.site/Pin-Up-Casino-M-xico-Diversi-n-y-Apuestas-de-Primera-2677b0bbe66d80dea0d2c47730ef2966 – Pin Up Casino Mexico – A popular online casino in Mexico!
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Хочу выделить материал про ОШИБКА: Некорректный URL..
Вот, делюсь ссылкой:
https://всеоопт.рф
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
https://t.me/perevedem_document Перевод Документов: Мост между Языками и Культурами В современном мире глобализации, где границы стираются, а сотрудничество между странами и культурами становится все более тесным, перевод документов приобретает огромное значение. Это не просто замена слов одного языка словами другого, а кропотливая работа по передаче смысла, контекста и нюансов оригинала, чтобы обеспечить полное и точное понимание информации. Когда необходим перевод документов? Международный бизнес: контракты, договоры, финансовые отчеты, маркетинговые материалы – все это требует качественного перевода для успешного ведения дел за рубежом. Юридические вопросы: судебные документы, свидетельства, доверенности, нотариальные акты должны быть переведены с соблюдением строгих юридических норм и терминологии. Медицинская сфера: медицинские заключения, инструкции к лекарствам, результаты исследований – точность перевода здесь критически важна для здоровья пациентов. Техническая документация: инструкции по эксплуатации, технические спецификации, чертежи – перевод должен быть понятным и однозначным для специалистов. Образование и наука: дипломы, аттестаты, научные статьи, исследования – для признания образования за рубежом и обмена знаниями необходим качественный перевод. Почему важно обращаться к профессионалам? Точность и соответствие: профессиональные переводчики обладают глубокими знаниями языка и предметной области, что гарантирует точность и соответствие перевода оригиналу. Соблюдение терминологии: использование правильной терминологии – залог того, что перевод будет понятен специалистам в соответствующей области. Культурная адаптация: профессиональный переводчик адаптирует текст с учетом культурных особенностей целевой аудитории, чтобы избежать недопонимания или неловких ситуаций. Конфиденциальность: профессиональные бюро переводов гарантируют конфиденциальность ваших документов. Как выбрать бюро переводов? Опыт и репутация: изучите опыт работы бюро, ознакомьтесь с отзывами клиентов. Специализация: убедитесь, что бюро специализируется на переводах в нужной вам области. Наличие профессиональных переводчиков: узнайте, работают ли в бюро переводчики с соответствующим образованием и опытом. Стоимость и сроки: сравните цены и сроки выполнения заказа в разных бюро. В заключение, перевод документов – это важный инструмент для преодоления языковых барьеров и успешного взаимодействия в современном мире. Доверяйте перевод ваших документов профессионалам, чтобы быть уверенными в качестве и точности результата. Если вам нужно перевести конкретный документ, просто предоставьте его мне, и я постараюсь вам помочь!
дрочеры!
Після тестування різних сайтов с парнушкой я зрозумів, що ultraprint.com.ua — кращий вибір для перегляду порно.
онлайн-ресурс для порно ultraprint.com.ua за посиланням нижче:
порно кума
узнать больше
камета казино
Портал про детей https://mch.com.ua информационный ресурс для родителей. От беременности и ухода за малышом до воспитания школьников. Советы, статьи и поддержка для гармоничного развития ребёнка.
Женский онлайн-журнал https://girl.kyiv.ua стиль, уход за собой, психология, кулинария, отношения и материнство. Ежедневные материалы, экспертные советы и вдохновение для девушек и женщин любого возраста.
Онлайн-журнал для женщин https://krasotka-fl.com.ua всё о красоте, моде, семье и жизни. Полезные статьи, лайфхаки, советы экспертов и интересные истории. Читайте и вдохновляйтесь каждый день.
Je suis fou de Spinanga Casino, c’est un casino en ligne qui tourbillonne comme un ouragan dechaine. Le repertoire du casino est un tourbillon de divertissement, incluant des jeux de table de casino d’une elegance virevoltante. Le support du casino est disponible 24/7, avec une aide qui fait tourbillonner. Les retraits au casino sont rapides comme un cyclone, par moments plus de tours gratuits au casino ce serait dement. Globalement, Spinanga Casino offre une experience de casino virevoltante pour les passionnes de casinos en ligne ! Par ailleurs le site du casino est une merveille graphique orageuse, ajoute une touche de chaos au casino.
spinanga 5|
Ich bin suchtig nach SlotClub Casino, es ist ein Online-Casino, das wie ein Neonlicht explodiert. Der Katalog des Casinos ist ein Kaleidoskop voller Spa?, mit einzigartigen Casino-Slotmaschinen. Der Casino-Kundenservice ist wie ein leuchtender Funke, antwortet blitzschnell wie ein Kurzschluss. Casino-Transaktionen sind simpel wie ein Schalter, ab und zu wurde ich mir mehr Casino-Promos wunschen, die wie ein Feuerwerk knallen. Am Ende ist SlotClub Casino ein Casino, das man nicht verpassen darf fur Abenteurer im Casino! Extra die Casino-Seite ist ein grafisches Meisterwerk, einen Hauch von Neon-Magie ins Casino bringt.
slotclub seriös|
Adoro o brilho de Richville Casino, da uma energia de cassino tao luxuosa quanto um trono. As opcoes de jogo no cassino sao ricas e reluzentes, com jogos de cassino perfeitos para criptomoedas. O servico do cassino e confiavel e majestoso, dando solucoes precisas e imediatas. As transacoes do cassino sao simples como abrir um cofre, as vezes as ofertas do cassino podiam ser mais generosas. No geral, Richville Casino e uma joia rara para os fas de cassino para os apaixonados por slots modernos de cassino! De lambuja a interface do cassino e fluida e brilha como um salao de baile, o que torna cada sessao de cassino ainda mais reluzente.
richville casino online|
mostbet.com вход mostbet.com вход
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Зацепил материал про Советы по уходу и воспитанию собак: Портал 13 Собак.
Смотрите сами:
https://dog13.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
страница водка бет
как в 1вин использовать бонусы казино http://1win12008.ru
подробнее здесь
водкабет играть сейчас
таможенный брокер Ищете надежного партнера для таможенного оформления в столице? Наш таможенный брокер в Москве обладает глубоким знанием местной специфики и налаженными контактами с таможенными органами. Мы гарантируем быстрое и эффективное оформление ваших грузов, минимизируя риски и задержки.
кликните сюда
комета казино
ссылка на сайт
vodkabet
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Особенно понравился материал про Ваш новый сайт готов к запуску!.
Вот, делюсь ссылкой:
https://alloopt.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
kraken онион kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
на этом сайте
водкабет
Источник
комета казино
скачать мостбет на телефон http://mostbet12003.ru
mostbet официальный сайт вход https://www.mostbet12007.ru
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Для тех, кто ищет информацию по теме “Искусство и эстетика эротической фотографии”, есть отличная статья.
Ссылка ниже:
https://eroticpic.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Backlinks SEO Google Websites Analyzers Redirects PR 8-10
Backlinks on Polish domains constitute an efficient strategy to enhance your website’s ranking as well as authority on Google search results.
Links are placed exclusively on backlinks in authentic Polish forums, blogs, along with discussion sections. This is organic link building which not merely enhance SEO performance, but also brings in supplemental traffic from referrals by genuine users.
What makes it beneficial to choose this SEO solution?
100% Polish domains
Combination including forums, thematic blogs, plus contextual placements
Authentic linking profile highly rated by Google
Following the work, of our services, you will receive a clear and detailed text report
такой
kometa casino
Откройте секреты счастливого детства с качественными товарами от TykePop.
Хочу выделить материал про Автопутешествия по России: советы и вдохновение.
Вот, делюсь ссылкой:
https://sibvaleo-kmv.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Онлайн-журнал https://presslook.com.ua для женщин объединяет всё, что важно: мода и стиль, воспитание детей, карьерные советы и вдохновение. Советы специалистов и реальные истории для поддержки и новых идей.
Актуальные тренды https://horoscope-web.com и вневременная классика. Подборки образов, советы по стилю, секреты гардероба и модные инсайты. Мы поможем тебе выглядеть безупречно каждый день и выразить свой индивидуальный стиль.
Твой гид https://nicegirl.kyiv.ua по здоровому образу жизни! Эффективные тренировки, сбалансированное питание, wellness-практики и советы по мотивации. Обрети энергию, силу и гармонию в теле, которое ты любишь.
Ресурс для амбициозных https://ramledlightings.com и целеустремленных. Карьерный рост, личная эффективность, финансовая грамотность и вдохновляющие истории успеха. Реализуй свой потенциал и добивайся всех поставленных целей!
взгляните на сайте здесь
казино водка бет vodkabet
https://impossible-studio.ghost.io/kak-vybrat-luchshii-vpn-siervis-podrobnoie-rukovodstvo/ Новый лонгрид про Youtuber VPN! Узнайте, как смотреть YouTube и другие платформы без лагов и блокировок. Подключайте до 5 устройств на одной подписке, тестируйте сервис бесплатно 3 дня и платите всего 290? в первый месяц вместо 2000? у конкурентов. Серверы в Европе — ваши данные защищены от российских властей.
most bet skachat most bet skachat
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Особенно понравился материал про Полезные советы и рецепты для всех случаев.
Смотрите сами:
https://classifields.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Porn
1win iphone https://www.1win12005.ru
Thanks for sharing. I read many of your blog posts, cool, your blog is very good. binance Registrera dig
кракен darknet kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Между прочим, если вас интересует Как Stropik поможет улучшить ваше финансовое будущее, посмотрите сюда.
Вот, делюсь ссылкой:
https://stropik.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Покупка продажа гидравлических подъемников может быть выгодным решением для бизнеса или производства, особенно когда необходимо поднимать тяжелые грузы.
Гидравлические подъемники стационарные широко используются в различных отраслях промышленности для подъема и перемещения тяжелых грузов. Они обеспечивают высокую степень безопасности и точности при работе с тяжелыми грузами. Гидравлические подъемники стационарные можно устанавливать на существующих производственных площадках. Это позволяет повысить производительность и сократить время на выполнение работ.
Гидравлические подъемники стационарные используются для подъема и перемещения тяжелого оборудования и конструкций. Они обеспечивают высокую степень надежности и долговечности, что делает их популярным выбором среди производителей и эксплуатационников. Гидравлические подъемники стационарные могут быть оборудованы системами автоматического управления.
Гидравлические подъемники стационарные работают на основе принципа гидравлического передатчика, который преобразует энергию гидравлической жидкости в механическую энергию. Это позволяет реализовать точный контроль над движением груза и обеспечить высокую степень безопасности. Гидравлические подъемники стационарные могут быть оснащены системами обратной связи, которые позволяют контролировать положение и скорость груза. Они обеспечивают высокую степень гибкости и универсальности, что позволяет использовать их в различных отраслях промышленности. Гидравлические подъемники стационарные могут быть оснащены системами автоматического управления и мониторинга.
Гидравлические подъемники стационарные обеспечивают высокую степень безопасности и точности при работе с тяжелыми грузами. Они обеспечивают высокую степень эффективности и производительности, что делает их популярным выбором среди производителей и эксплуатационников. Гидравлические подъемники стационарные могут быть интегрированы в существующие системы производства и могут быть использованы в сочетании с другими типами подъемного оборудования. Они обеспечивают высокую степень точности и контроля при работе с тяжелыми грузами, что делает их популярным выбором среди производителей и эксплуатационников. Гидравлические подъемники стационарные могут быть оснащены системами обратной связи, которые позволяют контролировать положение и скорость груза.
Гидравлические подъемники стационарные требуют регулярного обслуживания и ремонта для обеспечения их надежной и эффективной работы. Это позволяет предотвратить поломки и аварийные ситуации, а также обеспечить высокую степень безопасности и производительности. Гидравлические подъемники стационарные должны быть регулярно проверены и сертифицированы. Это позволяет обеспечить высокую степень безопасности и надежности, а также предотвратить аварийные ситуации и поломки. Гидравлические подъемники стационарные могут быть оснащены системами защиты от перегрузки и аварийных ситуаций.
Для эффективного и безопасного перемещения тяжелых грузов на различных промышленных объектах и складах часто используется подъемное оборудование санкт петербург, которое обеспечивает высокую производительность и снижает риск травм среди работников.
Подъемное оборудование используется для перемещения и подъема тяжелых грузов, что необходимо во многих отраслях промышленности и строительства. Это оборудование требует специальных знаний и навыков для безопасной эксплуатации. Операторы подъемного оборудования проходят специальное обучение для того, чтобы уметь работать с этим оборудованием безопасно и эффективно. Правильный выбор подъемного оборудования зависит от конкретной задачи и характеристик груза. Правильный выбор оборудования гарантирует успешное выполнение работ и безопасность сотрудников.
Конкретные примеры применения подъемного оборудования можно увидеть на строительных площадках, в производственных цехах и складских помещениях. Каждое применение подъемного оборудования требует тщательного планирования и подготовки. Перед началом работ проводится тщательный осмотр оборудования и проверка всех систем. Безопасность при работе с подъемным оборудованием имеет первостепенное значение. Реализация комплексных мер безопасности минимизирует риски аварий и травм при работе с подъемным оборудованием.
Своевременное обслуживание помогает предотвратить поломки и обеспечить бесперебойную эксплуатацию подъемного оборудования. Ремонт подъемного оборудования должен выполняться только квалифицированными специалистами. Специалисты по ремонту подъемного оборудования проходят специальное обучение и имеют необходимый опыт для выполнения высококачественного ремонта. Обучение персонала обслуживающего и ремонтного персонала является крайне важным. Постоянное совершенствование навыков ремонтного персонала позволяет оперативно решать возникающие проблемы и поддерживать подъемное оборудование в рабочем состоянии.
Интеграция передовых технологий в конструкции подъемного оборудования открывает новые горизонты для отрасли. Перспективы развития подъемного оборудования тесно связаны с потребностями промышленности и строительства. Инновационные подходы в конструкции и эксплуатации подъемного оборудования будут определять будущее отрасли. Устойчивость и экологичность подъемного оборудования становятся все более важными факторами. Разработка экологически чистого подъемного оборудования, работающего на альтернативных источниках энергии, открывает новые перспективы для снижения воздействия на окружающую среду.
https://google.ac/url?q=https://justpaste.me/vDsc7 – Pin Up Casino Mexico – A popular online casino in Mexico!
Ищете надежный клининговая компания в москве? Мы предлагаем качественные услуги по уборке и поддержанию чистоты!
Клининг — это важная часть нашей жизни, чтобы обеспечить уют и комфорт в повседневной жизни. Систематическая чистка позволяет избавиться от пыли и грязи, что, в свою очередь, способствует улучшению здоровья. Этот процесс требует регулярного внимания.
В области клининга применяются различные подходы. Каждый из них имеет свои особенности. Применение современных технологий делает уборку более быстрой и качественной. Выбор подходящего способа зависит от обстоятельств.
Вы можете заниматься уборкой самостоятельно, но иногда стоит рассмотреть возможность найма клининговой компании. Клининговые службы имеют в своем арсенале качественное оборудование. Вы получите чистое пространство без лишних усилий.
Чистота требует постоянного внимания и ухода. Регулярное планирование уборки поможет поддерживать порядок. Регулярность уборки поможет избежать ненужных затрат esforcos. Чистота в вашем пространстве положительно сказывается на вашем настроении.
Шахтные подъемники для склада обеспечивают эффективное перемещение грузов внутри здания, поэтому стоит обратить внимание на [url=https://shakhtnyy-podyomnik-gruzovoy15.ru/]производство шахтных подъемников под ключ[/url].
Подъемники шахтного типа для склада играют ключевую роль в сфере логистики.
заказ курсовых онлайн курсовые работы в москве
ссылка на сайт
водкабет играть сейчас
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Зацепил материал про Раскройте фотографический потенциал с Gloss & Matte.
Смотрите сами:
https://gloss-matte.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
этот сайт
водкабет играть сейчас
подробнее
vodkabet
кредитные займы онлайн быстрый займ на карту онлайн
срочно онлайн займ отказа займы онлайн на карту первый
Если вы хотите освоить продвижение сайта курсы, то у вас есть отличная возможность начать обучение уже сейчас!
Продвижение сайтов — это, привлекать больше посетителей. Такое продвижение требует. Важно выделить SEO как один из основных аспектов.
разные методы. Следует обратить внимание на. Контент, который размещен на сайте, относится к внутренним факторам, внешние факторы заключаются в ссылках на сайт.
Качественный контент — основа успешного продвижения. Уникальный, полезный контент — залог успеха. Обновление контента также важно. Поисковые системы предпочитают актуальные данные.
Социальные сети играют важную роль в продвижении. Платформы позволяют. значительно увеличить число внешних ссылок. Итак, активность в социальных сетях является критически важной для продвижения.
Puzzles online https://puzzlefree.pages.dev/ play for free in assembling pictures of any complexity. Thousands of options: classic, children’s, 3D and thematic. Convenient interface, saving progress and new puzzles every day.
Узнать больше водка бэт
игра авиатор 1win игра авиатор 1win
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “Новые вечерние платья и аксессуары со скидкой 30%”, нашел много полезного.
Вот, делюсь ссылкой:
https://dejaviu.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
сайт
комета зеркало
содержание
kameta
сайт
казино водка бет vodkabet
узнать больше
комета казино
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Рабочие стратегии и советы от Букмекерской Братва, загляните сюда.
Вот, можете почитать:
https://mersobratva.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
подробнее здесь
комета зеркало
kraken ссылка зеркало kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
узнать больше
cometa главная вход
comprar perfumes originales en Peru
Luxtor Peru: Tienda Online con mas de 10,000 productos originales en perfumes, cuidado personal, maquillaje, electrohogar y ofertas exclusivas.
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Футбольные новости, аналитика и интервью игроков”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://pro-zenit.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Расчистка участка Утилизация деревьев: экологически безопасное избавление от древесных отходов Утилизация деревьев – это процесс экологически безопасного избавления от древесных отходов. Утилизация деревьев может включать переработку древесины, сжигание с использованием специальных технологий и захоронение на полигонах.
sportwetten geld zurück
My web site; österreich türkei wetten
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Зацепил раздел про Все об отелях: советы и обзоры для идеального отдыха.
Вот, можете почитать:
https://095hotel.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Между прочим, если вас интересует Вдохновляющие техники и советы по реставрации старых вещей, посмотрите сюда.
Вот, делюсь ссылкой:
https://fjhg.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
купитькартинубарнаул Портрет Вид искусства в котором художник изображает человека.
Adoro o encanto de SpinWiz Casino, parece um redemoinho de diversao mistica. Tem uma enxurrada de jogos de cassino irados, oferecendo sessoes de cassino ao vivo que brilham como pocoes. O atendimento ao cliente do cassino e um feitico de eficiencia, respondendo mais rapido que um estalo magico. As transacoes do cassino sao simples como uma pocao, mesmo assim mais recompensas no cassino seriam um diferencial encantado. No fim das contas, SpinWiz Casino e o point perfeito pros fas de cassino para quem curte apostar com estilo mistico no cassino! Alem disso o site do cassino e uma obra-prima de estilo mistico, adiciona um toque de encantamento ao cassino.
spinwiz casino|
mostber mostber
kraken onion ссылка kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Для тех, кто ищет информацию по теме “Изучение русских диалектов на LingoMap”, там просто кладезь информации.
Смотрите сами:
https://lingomap.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
мостбет казино войти mostbet12008.ru
Откройте секреты счастливого детства с качественными товарами от TykePop.
Особенно понравился раздел про Выгодные предложения и советы на каждый день.
Вот, делюсь ссылкой:
https://stopcena.com
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
микрозаймы без процентов онлайн лучший Убедился в надежности сервиса, микрозайм онлайн без отказа подошёл мне идеально.
Откройте секреты счастливого детства с качественными товарами от TykePop.
Между прочим, если вас интересует Достигай цели с помощью тренера и автора Ния Дом, посмотрите сюда.
Вот, можете почитать:
https://niya.su
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Уникальные техники йоги и медитации для начинающих, загляните сюда.
Вот, можете почитать:
https://yogapulse.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
кракен ссылка onion kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
1win мобильная версия сайта https://1win12005.ru
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Между прочим, если вас интересует Советы по уходу за редкими домашними растениями, загляните сюда.
Смотрите сами:
https://raregreen.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
http://images.google.ws/url?q=https://grubtechnologies.com.mx/blog/promociones-semanales-en-pin-up-casino-mexico/ – Pin Up Casino Mexico – A popular online casino in Mexico!
1win официальный сайт букмекерской конторы http://1win12004.ru
mostbet skachat http://mostbet12008.ru
один вин https://www.1win12006.ru
как отыграть бонусный баланс на 1win как отыграть бонусный баланс на 1win
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Вдохновляющие техники и советы по реставрации старых вещей, загляните сюда.
Вот, делюсь ссылкой:
https://fjhg.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Журнал для женщин https://rpl.net.ua которые строят карьеру и хотят большего. Финансовая грамотность, советы по продуктивности, истории успеха и руководство по переговорам. Достигайте своих целей с нами!
Твой гид https://womanlife.kyiv.ua по стильной жизни. Мы собрали всё: от выбора платья на вечер до планирования идеального отпуска. Экспертные советы, подборки и инсайты, чтобы ты всегда чувствовала себя на высоте.
Онлайн-журнал о моде https://glamour.kyiv.ua без правил. Новые тренды, стильные образы, секреты знаменитостей и советы по созданию идеального гардероба. Мы поможем вам найти и с уверенностью выразить свой уникальный стиль.
Женский сайт https://bbb.dp.ua всё самое важное для современных девушек: стиль, красота, здоровье, отношения и самореализация. Читайте, вдохновляйтесь и находите новые идеи.
Je trouve absolument dement Stake Casino, ca vibre avec une energie de casino incandescente. L’eventail de jeux du casino est une eruption de delices, comprenant des jeux de casino adaptes aux cryptomonnaies. Le service client du casino est une flamme vive, offrant des solutions claires et instantanees. Les gains du casino arrivent a une vitesse explosive, par moments des bonus de casino plus frequents seraient explosifs. Au final, Stake Casino est un casino en ligne qui fait trembler le sol pour les passionnes de casinos en ligne ! De surcroit le design du casino est un spectacle visuel en fusion, ajoute une touche de feu au casino.
stake in france|
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Особенно понравился материал про Лучшие стратегии и бонусы для игры в онлайн-казино.
Смотрите сами:
https://tars-rubber.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Купить диплом техникума в Донецк [url=http://www.educ-ua9.ru]Купить диплом техникума в Донецк[/url] .
кракен onion сайт kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Хочу выделить материал про Новые вечерние платья и аксессуары со скидкой 30%.
Вот, делюсь ссылкой:
https://dejaviu.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Новостной портал Украины https://lenta.kyiv.ua оперативные события в стране. Политика, экономика, региональные новости, спорт и культура. Достоверные материалы и аналитика каждый день.
oppatoto
Новостной сайт https://vesti.in.ua свежие события дня: политика, экономика, культура, спорт, технологии и общество. Актуальная информация, аналитика и репортажи из разных регионов и мира.
Свежие новости https://sensus.org.ua Украины и мира: главные события, репортажи и аналитика. Политика, экономика, общество и культура в удобном формате онлайн.
Свежие новости Украины https://novosti24.kyiv.ua главные события, мнения экспертов и аналитические материалы. Лента новостей онлайн, репортажи и достоверные факты без перерыва.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Между прочим, если вас интересует Как построить внутреннюю устойчивость с Лизой Мартин, посмотрите сюда.
Вот, делюсь ссылкой:
https://pravoedelomos.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Достигай цели с помощью тренера и автора Ния Дом, загляните сюда.
Ссылка ниже:
https://niya.su
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
мостбет контакты http://www.mostbet12009.ru
нажмите здесь водка бэт
Узнать больше
vodka.bet
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Особенно понравился материал про Лучшие стратегии и бонусы для игры в онлайн-казино.
Смотрите сами:
https://tars-rubber.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
kraken онион kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
https://images.google.ru/url?q=http://www.edutip.mx/ventajas-de-jugar-en-pin-up-casino-desde-mexico/ – Pin Up Casino Mexico – A popular online casino in Mexico!
Van de traditionele fruitautomaten tot de nieuwste videoslots, ik heb ze
allemaal uitgeprobeerd. Laat mij je wegwijzer zijn in dit gigantische aanbod.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Мир мультфильмов: Новости, Обзоры и Сообщество”, нашел много полезного.
Смотрите сами:
https://obender.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
посетить сайт
kometa
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Между прочим, если вас интересует Уникальные DIY проекты: декор и эко-мебель, посмотрите сюда.
Ссылка ниже:
https://diyworks.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Ich finde absolut elektrisierend SportingBet Casino, es fuhlt sich an wie ein Volltreffer im Spielrausch. Die Auswahl im Casino ist ein echter Torerfolg, mit modernen Casino-Slots, die einen mitrei?en. Das Casino-Team bietet Unterstutzung, die wie ein Volltreffer glanzt, sorgt fur sofortigen Casino-Support, der begeistert. Auszahlungen im Casino sind schnell wie ein Sprinter, dennoch mehr Freispiele im Casino waren ein Torerfolg. Alles in allem ist SportingBet Casino ein Casino, das man nicht verpassen darf fur Abenteurer im Casino! Zusatzlich die Casino-Plattform hat einen Look, der wie ein Torjubel strahlt, den Spielspa? im Casino auf das Spielfeld hebt.
sportingbet south africa review|
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Хочу выделить раздел про Честные обзоры фильмов и гаджетов: стоит ли доверять.
Вот, делюсь ссылкой:
https://100ch.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
кракен darknet kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Domain Rating
Position in search results is crucial for SEO.
We specialize in attracting Google search robots to your website to raise the search ranking using publishing articles, SEO tools, and we also attract search bots through external platforms.
There are 2 main types of crawlers – crawling and indexing.
Spider bots are the initial visitors to the site and also instruct data-processing crawlers to enter.
Higher click volume from search robots to the site, the more beneficial it is for the project.
Prior to starting the work, we will provide you with a screenshot of the DR from ahrefs.com/backlink-checker, and after the work is completed, there will be another a screenshot of the domain rating from Ahrefs’ backlink analysis tool.
You pay only upon success!
Estimated production time is 3–14 business days,
In some instances, more time is required.
We accept projects for websites up to 50 DR.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Хочу выделить материал про Советы и тренды путешествий: Всё об отелях.
Вот, можете почитать:
https://hotelnews.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
лучшие платные нейросети
лучшие нейросети, востребованные в 2025 году
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Особенно понравился раздел про Почему выбрать Форсаж для ухода за авто?.
Смотрите сами:
https://forsag2011.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Особенно понравился раздел про Улучшите психологическое здоровье с Человекологией.
Смотрите сами:
https://roleresources.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
perfumes de mujer originales
Luxtor Perú: Tienda online líder en la venta de perfumes originales en Perú, con más de 10,000 productos de Natura, Yanbal, Ésika, L’Bel, Avon y Cyzone, además de maquillaje, cuidado personal y ofertas exclusivas con garantía de autenticidad.
https://www.google.co.uk/url?q=https://4wall.com.mx/2025/09/05/que-tan-rapido-paga-pin-up-en-mexico/ – Pin Up Casino Mexico – A popular online casino in Mexico!
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Зацепил материал про Советы и тренды путешествий: Всё об отелях.
Вот, делюсь ссылкой:
https://hotelnews.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Ik ontleed de kansberekening achter ieder casinospel.
Gewapend met deze kennis zet je niet langer, je calculeert.
Узнайте все нюансы о компании Автомикс-Смоленск — официальном дилере Honda, техническая поддержка, сервис по кузовному ремонту и фирменные комплектующие! Посетите https://avtomiks-smolensk.ru/ и ознакомьтесь версии авто. Хотите удобство и стабильность — дилер предлагает тест-драйв, официальное ТО, брендовые решения, а также гарантийное ТО, помощь после покупки и прозрачные цены. Подбираете авто класса Honda — здесь найдёте лучшие варианты и внимательное обслуживание.
1 win скачать на айфон 1 win скачать на айфон
сайт мостбет https://mostbet12012.ru/
лучшие нейросети для архитекторов
купить в томске аттестат за 11 класс купить в томске аттестат за 11 класс .
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “Скидка 25% на услуги красоты для женщин”, нашел много полезного.
Ссылка ниже:
https://libka-lylytay.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
лучшие нейросети для поиска информации
Новости Украины https://status.net.ua объективная информация о событиях страны. Политика, экономика, региональные новости, спорт и культура. Читайте актуальные материалы каждый день.
https://impossible-studio.ghost.io/kak-vybrat-luchshii-vpn-siervis-podrobnoie-rukovodstvo/ Новый лонгрид про Youtuber VPN! Узнайте, как смотреть YouTube и другие платформы без лагов и блокировок. Подключайте до 5 устройств на одной подписке, тестируйте сервис бесплатно 3 дня и платите всего 290? в первый месяц вместо 2000? у конкурентов. Серверы в Европе — ваши данные защищены от российских властей.
Новостной портал https://mediateam.com.ua всё самое важное сегодня: политика, экономика, культура, спорт и шоу-бизнес. Лента новостей, репортажи и аналитические материалы каждый день.
Новости Украины и мира https://mostmedia.com.ua политика, экономика, культура, спорт и общество. Свежие события, аналитика и репортажи. Будьте в курсе главных новостей в режиме онлайн 24/7.
Необходимо кодирование? прокапаться от алкоголя Хабаровск современные методы, конфиденциальность и поддержка специалистов. Помогаем избавиться от зависимости и вернуться к здоровой жизни.
kraken официальные ссылки kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Looks like my earlier comment didn’t appear, but I just wanted to say—your blog is so inspiring! I’m still figuring things out as a beginner,and reading your posts makes me want to keep going with my own writing journey.
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Хочу выделить раздел про Творческие идеи подарков на все случаи жизни.
Ссылка ниже:
https://parkpodarkov.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Ищете удобство и комфорт? У нас вы можете автомобиль с водителем новосибирск!
Множество компаний предлагают данный сервис, и выбрать среди них не так просто.
deutsche sportwetten lizenz
my webpage – comment-203268 (Cyril)
Son sahneye kadar merakını diri tutacak. Dayı 2 İzle ile bu deneyimi yaşa mutlaka.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
По теме “Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации”, нашел много полезного.
Смотрите сами:
https://spb-hotels.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
ссылка на сайт [url=https://trip-scan.us]Трипскан зеркало[/url]
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Выгодные предложения и советы на каждый день”, есть отличная статья.
Вот, делюсь ссылкой:
https://stopcena.com
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Строительство каркасный дом в спб становится все более популярным благодаря своей экологической безопасности, быстрому сроку строительства и доступности.
Каркасные дома становятся все более популярными среди людей, которые хотят построить свой дом быстро и экономично . Это связано с тем, что они являются экологически чистым вариантом строительства дома . Кроме того, каркасные дома могут быть построены в короткие сроки, что важно для тех, кто хочет быстро переехать в свой новый дом .
Каркасные дома также обеспечивают высокую степень изоляции, что важно для энергосбережения . Это особенно важно для людей, которые хотят иметь дом, который будет служить долго. Кроме того, каркасные дома могут быть оснащены современными технологиями, что делает их комфортными и функциональными.
каркасные дома обеспечивают высокую степень энергоэффективности и долговечности . Это связано с тем, что они могут быть построены на любой местности . Кроме того, каркасные дома могут быть оснащены современными технологиями, что делает их комфортными и функциональными .
каркасные дома могут быть построены с использованием экологически чистых материалов, что снижает их воздействие на окружающую среду . Это особенно важно для людей, которые хотят сэкономить на коммунальных услугах . Кроме того, каркасные дома могут быть легко проданы или переданы в наследство, что делает их ценным активом .
процесс строительства каркасного дома включает в себя ряд этапов, начиная от подготовки местности и заканчивая отделочными работами . Это связано с тем, что он включает в себя выбор материалов и оборудования . Кроме того, строительство каркасного дома может быть спроектировано в соответствии с индивидуальными потребностями заказчика, что делает его идеальным для тех, кто хочет иметь свой собственный дом.
Процесс строительства каркасного дома также включает в себя ряд этапов, начиная от подготовки фундамента и заканчивая отделочными работами . Это особенно важно для людей, которые хотят сэкономить на коммунальных услугах . Кроме того, строительство каркасного дома может быть выполнено в соответствии с любым архитектурным стилем .
в заключение, каркасные дома обеспечивают высокую степень энергоэффективности и долговечности . Это связано с тем, что они могут быть построены на любой местности . Кроме того, каркасные дома могут быть оснащены современными технологиями, что делает их комфортными и функциональными .
каркасные дома могут быть спроектированы в соответствии с любым архитектурным стилем, что делает их универсальными. Это особенно важно для людей, которые хотят иметь дом с низкими эксплуатационными затратами. Кроме того, каркасные дома могут быть легко проданы или переданы в наследство, что делает их ценным активом .
Для тех, кто интересуется современными и эффективными строительными технологиями, каркасные дома спб становится все более популярным вариантом, предлагающим множество преимуществ в плане энергосбережения и скорости строительства.
представляют собой инновационное решение для тех, кто хочет жить в комфорте. Они позволяют создавать уникальные интерьеры . Каркасные дома строются быстро .
Каркасные дома пользуются большим спросом. Они имеют множество преимуществ . Каркасные дома строятся быстро. Каркасные дома являются экологически чистым вариантом .
Каркасные дома обеспечивают комфортное проживание. Они строятся быстро. Каркасные дома являются экологически чистым вариантом . Каркасные дома могут быть спроектированы под любые вкусы .
Каркасные дома имеют долгий срок службы . Они могут быть использованы для строительства коттеджей . Каркасные дома являются обязательным элементом современного строительства . Каркасные дома позволяют экономить на строительстве .
Процесс строительства каркасных домов включает в себя несколько этапов . Затем проводятся работы по монтажу каркаса . Каркасные дома могут быть спроектированы под любые вкусы. После устанавливаются коммуникации .
Процесс строительства каркасных домов начинается с проектирования. Затем следует этап строительства фундамента. Каркасные дома имеют высокую энергоэффективность . После выполняется отделка помещения.
Каркасные дома имеют высокую энергоэффективность . Они позволяют создавать уникальные интерьеры . Каркасные дома являются экологически чистым вариантом. В каркасные дома будут широко использоваться для строительства жилых домов .
Каркасные дома имеют долгий срок службы . Они могут быть использованы для строительства коттеджей . Каркасные дома являются обязательным элементом современного строительства . В каркасные дома будут продолжать совершенствоваться.
Для тех, кто ищет современное и практичное жилье, каркасные дома спб под ключ может стать идеальным решением, сочетая в себе доступность, быстроту строительства и экологическую безопасность.
из-за своей прочности и долговечности . Это связано с тем, что каркасные дома имеют низкую стоимость по сравнению с другими типами жилья. Кроме того, каркасные дома могут быть построены на любом типе грунта .
Каркасный дом – это не только экономичный, но и экологически чистый вариант жилья поскольку для его строительства используются натуральные материалы . Это означает, что каркасные дома не наносят вреда окружающей среде . Кроме того, каркасные дома могут быть оснащены современными технологиями .
Каркасный дом имеет множество преимуществ таких как прочность и долговечность . Это связано с тем, что каркасные дома построены на прочном каркасе . Кроме того, каркасные дома могут быть построены на любом типе грунта .
Каркасный дом – это идеальный вариант для тех, кто хочет иметь индивидуальный проект. Это связано с тем, что каркасные дома имеют высокую энергоэффективность . Кроме того, каркасные дома могут быть оснащены современными технологиями .
Строительство каркасного дома – это процесс который включает в себя несколько этапов. Это связано с тем, что каркасные дома построены на прочном каркасе . Кроме того, каркасные дома могут быть спроектированы в любом стиле.
Каркасный дом может быть построен с использованием натуральных материалов . Это означает, что каркасные дома могут быть спроектированы в любом стиле . Кроме того, каркасные дома могут быть легко расширены или реконструированы.
Каркасный дом – это идеальный вариант для тех, кто хочет иметь индивидуальный проект. Это связано с тем, что каркасные дома могут быть легко расширены или реконструированы. Кроме того, каркасные дома могут быть спроектированы в любом стиле.
Каркасный дом – это не только экономичный, но и экологически чистый вариант жилья в связи с тем, что он может быть построен из переработанных материалов. Это означает, что каркасные дома не наносят вреда окружающей среде . Кроме того, каркасные дома могут быть спроектированы в любом стиле .
этот сайт Трипскан линк
Откройте секреты счастливого детства с качественными товарами от TykePop.
Кстати, если вас интересует Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации, загляните сюда.
Смотрите сами:
https://spb-hotels.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
mostbet казино https://www.mostbet12012.ru
лучшие нейросети для анализа текста
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Хочу выделить материал про Переверните правила игры с экзотическими диетами.
Вот, можете почитать:
https://detoxa.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
вызвать нарколога на дом частный нарколог в Томске
блэкспрут сайт blacksprut блэкспрут black sprut блэк спрут blacksprut вход блэкспрут ссылка blacksprut ссылка blacksprut onion блэкспрут сайт блэкспрут вход блэкспрут онион блэкспрут дакрнет blacksprut darknet blacksprut сайт блэкспрут зеркало blacksprut зеркало black sprout blacksprut com зеркало блэкспрут не работает blacksprut зеркала как зайти на blacksprut
продолжить Трипскан без впн
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Неизведанные маршруты для путешествий по России”, там просто кладезь информации.
Смотрите сами:
https://rustrail.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Adoro o frenesi de AFun Casino, tem uma vibe de jogo tao vibrante quanto um desfile de cores. A selecao de titulos do cassino e um espetaculo de luzes, com jogos de cassino perfeitos pra criptomoedas. O suporte do cassino ta sempre na ativa 24/7, respondendo mais rapido que um estalo de confete. Os pagamentos do cassino sao lisos e blindados, as vezes queria mais promocoes de cassino que botam pra quebrar. Na real, AFun Casino e o point perfeito pros fas de cassino para quem curte apostar com estilo festivo no cassino! Alem disso a plataforma do cassino brilha com um visual que e puro axe, torna a experiencia de cassino uma folia inesquecivel.
saque afun|
Je suis totalement enflamme par VBet Casino, ca pulse avec une energie de casino digne d’un cratere. Les options de jeu au casino sont riches et enflammees, incluant des jeux de table de casino d’une elegance ardente. Les agents du casino sont rapides comme une etincelle, joignable par chat ou email. Le processus du casino est transparent et sans cendres, parfois des bonus de casino plus frequents seraient brulants. Au final, VBet Casino est une pepite pour les fans de casino pour les joueurs qui aiment parier avec panache au casino ! A noter l’interface du casino est fluide et eclatante comme un cratere en fusion, donne envie de replonger dans le casino sans fin.
vbet easy|
mostbet сайт регистрация https://www.mostbet12010.ru
Онлайн новостной портал https://reporternews.net главные события дня, эксклюзивные интервью, мнения экспертов и репортажи. Достоверная информация о политике, бизнесе и жизни общества.
Новостной портал https://newsawait.com свежие новости, аналитика и обзоры. Политика, экономика, культура и спорт. Лента событий в режиме реального времени с проверенными фактами.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Особенно понравился раздел про Полное руководство для владельцев собак.
Вот, делюсь ссылкой:
https://argus-club.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
http://images.google.com.bh/url?q=http://eseguro.mx/que-licencias-tiene-pin-up-en-mexico/ – Pin Up Casino Mexico – A popular online casino in Mexico!
Портал про авто https://dream-autos.com новости, обзоры и тест-драйвы. Полезные советы по выбору, ремонту и эксплуатации автомобилей. Каталог машин, актуальные цены и аналитика авторынка.
Estou completamente vidrado por AFun Casino, parece uma rave de diversao sem fim. As opcoes de jogo no cassino sao ricas e cheias de swing, oferecendo sessoes de cassino ao vivo que pulsam como batidas. A equipe do cassino entrega um atendimento que e puro carnaval, acessivel por chat ou e-mail. Os pagamentos do cassino sao lisos e blindados, as vezes mais bonus regulares no cassino seria brabo. Resumindo, AFun Casino garante uma diversao de cassino que e uma folia total para os apaixonados por slots modernos de cassino! Alem disso o design do cassino e um espetaculo visual de purpurina, o que torna cada sessao de cassino ainda mais animada.
afun site|
Estou completamente vidrado por BetorSpin Casino, da uma energia de cassino que e puro pulsar galactico. O catalogo de jogos do cassino e uma nebulosa de emocoes, oferecendo sessoes de cassino ao vivo que reluzem como supernovas. A equipe do cassino entrega um atendimento que e puro cometa, com uma ajuda que reluz como uma aurora boreal. Os saques no cassino sao velozes como uma viagem interestelar, mas mais recompensas no cassino seriam um diferencial astronomico. No fim das contas, BetorSpin Casino garante uma diversao de cassino que e uma supernova para os amantes de cassinos online! E mais a interface do cassino e fluida e reluz como uma constelacao, adiciona um toque de brilho estelar ao cassino.
betorspin bГіnus|
Acho simplesmente fenomenal BRCasino, tem uma vibe de jogo tao vibrante quanto uma escola de samba na avenida. Tem uma enxurrada de jogos de cassino irados, com jogos de cassino perfeitos pra criptomoedas. O servico do cassino e confiavel e cheio de swing, garantindo suporte de cassino direto e sem perder o ritmo. Os pagamentos do cassino sao lisos e blindados, de vez em quando as ofertas do cassino podiam ser mais generosas. No geral, BRCasino garante uma diversao de cassino que e um carnaval total para os viciados em emocoes de cassino! De bonus o site do cassino e uma obra-prima de estilo carioca, o que torna cada sessao de cassino ainda mais animada.
br77|
Ich finde absolut magisch Trickz Casino, es fuhlt sich an wie ein magischer Trick voller Gewinne. Die Casino-Optionen sind vielfaltig und verzaubernd, inklusive stilvoller Casino-Tischspiele. Der Casino-Kundenservice ist wie ein magischer Assistent, ist per Chat oder E-Mail erreichbar. Der Casino-Prozess ist klar und ohne Tauschung, trotzdem die Casino-Angebote konnten gro?zugiger sein. Alles in allem ist Trickz Casino ein Muss fur Casino-Fans fur Zauberer im Casino! Extra die Casino-Navigation ist kinderleicht wie ein Zauberspruch, Lust macht, immer wieder ins Casino zuruckzukehren.
trickz casino cashback|
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Лучшие маршруты и советы для морских круизов”, нашел много полезного.
Вот, делюсь ссылкой:
https://seatours.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Полезные советы и рецепты для всех случаев, посмотрите сюда.
Ссылка ниже:
https://classifields.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
блэкспрут зеркало blacksprut блэкспрут black sprut блэк спрут blacksprut вход блэкспрут ссылка blacksprut ссылка blacksprut onion блэкспрут сайт блэкспрут вход блэкспрут онион блэкспрут дакрнет blacksprut darknet blacksprut сайт блэкспрут зеркало blacksprut зеркало black sprout blacksprut com зеркало блэкспрут не работает blacksprut зеркала как зайти на blacksprut
Откройте секреты счастливого детства с качественными товарами от TykePop.
Кстати, если вас интересует Профессиональный коучинг для здорового образа жизни, загляните сюда.
Вот, можете почитать:
https://women-inet.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Egypt Bonanza by casinoplus.com.ph is more than just a slot—it’s a high-volatility journey through golden dunes and divine secrets. With stunning visuals, powerful Egyptian symbols, and a unique 6×5 reel format, every spin feels like unlocking a forgotten treasure chamber. If you crave mystery, legacy, and big wins, Egypt Bonanza is your gateway to digital glory. Egypt Bonanza
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “Анализ и новости рынка недвижимости в России”, там просто кладезь информации.
Вот, можете почитать:
https://anclaves.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Mahjong Ways 2 is the ultimate slot experience! With exciting free spins and multipliers, you’ll feel the thrill of every spin. Don’t miss out—try your luck now! Mahjong Ways 2
https://maps.google.la/url?q=http://eseguro.mx/que-licencias-tiene-pin-up-en-mexico/ – Pin Up Casino Mexico – A popular online casino in Mexico!
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Особенно понравился материал про Delightful Dessert and Baking Recipes at Home.
Вот, делюсь ссылкой:
https://eqa.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
my sources https://asterdex.cc
advice https://pactswap.org
Новости Украины и мира https://globalnewshome.com всё самое важное сегодня. Политика, экономика, региональные события, спорт и культура. Объективные статьи и аналитика в удобном формате.
Estou completamente hipnotizado por Bet558 Casino, oferece uma aventura de cassino que orbita como um cometa veloz. A selecao de titulos do cassino e um buraco negro de diversao, com caca-niqueis de cassino modernos e estelares. O suporte do cassino ta sempre na ativa 24/7, acessivel por chat ou e-mail. Os ganhos do cassino chegam voando como um asteroide, mas mais giros gratis no cassino seria uma loucura cosmica. No fim das contas, Bet558 Casino vale demais explorar esse cassino para os amantes de cassinos online! De bonus a navegacao do cassino e facil como uma orbita lunar, adiciona um toque de brilho estelar ao cassino.
bet558 analista|
Портал для женщин https://womanfashionista.com всё самое важное в одном месте: уход за собой, мода, дом, семья и карьера. Читайте полезные статьи, находите вдохновение и делитесь опытом.
Сайт детского сада https://malush16.ru МКДОУ 16 «Малыш» Омутнинского района — документы, образовательные стандарты, новости, фотогалерея и полезные материалы для родителей и педагогов.
Je suis accro a ViggoSlots Casino, ca vibre avec une energie de casino digne d’un blizzard. L’eventail de jeux du casino est une toundra de delices, incluant des jeux de table de casino d’une elegance arctique. Le support du casino est disponible 24/7, avec une aide qui brille comme un cristal de glace. Les retraits au casino sont rapides comme une avalanche, parfois des bonus de casino plus frequents seraient arctiques. Globalement, ViggoSlots Casino est une pepite pour les fans de casino pour les explorateurs polaires du casino ! A noter la plateforme du casino brille par son style givre, ce qui rend chaque session de casino encore plus glaciale.
wager viggoslots|
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
По теме “Эксклюзивные скидки и советы по выбору косметики”, есть отличная статья.
Ссылка ниже:
https://skidkosmo.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Mega онион Мега даркнет Мега сайт Мега онион Мега ссылка Mega даркнет Mega сайт Mega онион Mega ссылка Mega darknet Mega onion
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Для тех, кто ищет информацию по теме “Как построить внутреннюю устойчивость с Лизой Мартин”, там просто кладезь информации.
Смотрите сами:
https://pravoedelomos.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Acho simplesmente sensacional BacanaPlay Casino, oferece uma aventura de cassino que pulsa como um tamborim. As opcoes de jogo no cassino sao ricas e cheias de gingado, oferecendo sessoes de cassino ao vivo que sambam com energia. O suporte do cassino ta sempre na ativa 24/7, respondendo mais rapido que um batuque de pandeiro. As transacoes do cassino sao simples como um passo de samba, as vezes mais giros gratis no cassino seria uma loucura. No fim das contas, BacanaPlay Casino garante uma diversao de cassino que e um carnaval total para quem curte apostar com gingado no cassino! E mais o site do cassino e uma obra-prima de estilo carioca, o que torna cada sessao de cassino ainda mais animada.
bacanaplay bonus|
Je suis accro a ViggoSlots Casino, ca vibre avec une energie de casino digne d’un blizzard. Les options de jeu au casino sont riches et givrees, proposant des slots de casino a theme polaire. Le support du casino est disponible 24/7, avec une aide qui brille comme un cristal de glace. Les paiements du casino sont securises et fluides, cependant des bonus de casino plus frequents seraient arctiques. Pour resumer, ViggoSlots Casino est une pepite pour les fans de casino pour les passionnes de casinos en ligne ! A noter l’interface du casino est fluide et eclatante comme un glacier, facilite une experience de casino arctique.
viggoslots erfahrungen|
Ich bin total begeistert von Turbonino Casino, es verstromt eine Spielstimmung, die wie ein Turboboost explodiert. Der Katalog des Casinos ist ein Boxenstopp voller Action, inklusive stylischer Casino-Tischspiele. Das Casino-Team bietet Unterstutzung, die wie ein Turbo-Motor lauft, mit Hilfe, die wie ein Zundkerzenfunke spruht. Casino-Zahlungen sind sicher und reibungslos, trotzdem wurde ich mir mehr Casino-Promos wunschen, die wie ein Nitro-Boost knallen. Alles in allem ist Turbonino Casino ein Casino mit einem Spielspa?, der wie ein Zielsprint begeistert fur Abenteurer im Casino! Extra die Casino-Oberflache ist flussig und glanzt wie ein Rennwagen, den Spielspa? im Casino auf die Pole-Position hebt.
turbonino bingo|
https://google.cat/url?q=https://contralinea.com.mx/wp-content/pgs/?pin_up_casino_2758.html – Pin Up Casino Mexico – A popular online casino in Mexico!
Существует множество возможностей для того, чтобы пройти seo продвижение обучение в столице, что может существенно повысить уровень ваших навыков в интернет-маркетинге и продвижении веб-сайтов.
Пройдя SEO курсы в Москве, вы сможете существенно повысить свои навыки в области продвижения сайтов. Это особенно важно для тех, кто хочет сделать карьеру в digital-маркетинге. Пройдя эти курсы, вы получите глубокое понимание того, как работает SEO и как его применять на практике. Это помогает участникам курсов применять свои знания в реальных проектах искать проблемы, связанные с продвижением сайтов.
Преподаватели курсов SEO в Москве часто являются опытными специалистами, которые делятся своим опытом и предоставляют ценные советы. Это делает процесс обучения более эффективным и интересным. Кроме того, SEO курсы в Москве часто включают в себя анализ текущих тенденций в поисковых системах и предоставляют информацию о последних обновлениях алгоритмов.
Прохождение SEO курсов в Москве дает несколько преимуществ, включая возможность повысить свою квалификацию как специалиста по интернет-маркетингу. Это особенно важно в сегодняшнем быстро меняющемся цифровом мире. Преподаватели на этих курсах часто имеют большой опыт работы в области SEO и могут предоставить ценную информацию и советы. Это делает обучение более эффективным и интересным. Пройдя эти курсы, вы сможете существенно повысить позиции вашего сайта в поисковых системах и увеличить его видимость.
Курсы по SEO также учат, как создавать качественный и оптимизированный контент для сайтов. Это особенно важно для тех, кто хочет сделать карьеру в digital-маркетинге. Преподаватели на этих курсах часто имеют большой опыт работы в области SEO и могут предоставить ценную информацию и советы. Это делает обучение более эффективным и интересным. Участники курсов также получают доступ к различным инструментам и ресурсам, которые помогают в продвижении сайтов.
Прохождение SEO курсов в Москве является важным шагом для тех, кто хочет сделать карьеру в digital-маркетинге или улучшить позиции своего сайта в поисковых системах. Это особенно важно в сегодняшнем быстро меняющемся цифровом мире. Эти курсы предлагают комплексный подход к обучению, который включает в себя как теоретические, так и практические занятия. Это делает обучение более эффективным и интересным. Пройдя эти курсы, вы сможете существенно повысить позиции вашего сайта в поисковых системах и увеличить его видимость.
согласование перепланировки квартиры под ключ согласование перепланировки квартиры под ключ .
Здравствуйте!
Вся правда о сельской ипотеке в 2025 году без прикрас. [url=https://kredit-bez-slov.ru/selskaya-ipoteka-2025/]будет ли сельская ипотека в 2025 году[/url] Лимиты исчерпаны, банки не принимают заявки уже полгода
Написал: – https://kredit-bez-slov.ru/selskaya-ipoteka-2025/
будет ли сельская ипотека в 2025 году
сельская ипотека 2025 когда будет
До встречи!
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Зацепил раздел про Актуальные российские новости и глубокий анализ событий.
Вот, делюсь ссылкой:
https://avelonbeta.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Статьи для садоводов https://portalteplic.ru огородников, фермеров и пчеловодов: советы по уходу за растениями, животными и пасекой. Полезные инструкции, лайфхаки и сезонные рекомендации.
Портал о ремонте https://studio-nd.ru статьи, инструкции и советы для дома и квартиры. От выбора материалов до дизайна интерьеров. Полезные рекомендации для мастеров, новичков и частных застройщиков.
Сайт про металлопрокат https://the-master.ru каталог продукции, характеристики и сферы применения. Арматура, балки, трубы, листы и профили. Актуальные цены, советы специалистов и полезные статьи.
скоростные форсунки гбо 4 поколения
купить дипломы о высшем образовании купить дипломы о высшем образовании .
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Особенно понравился раздел про Полное руководство для владельцев собак.
Вот, можете почитать:
https://argus-club.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Геологоразведка и Георазведка: поиск полезных ископаемых и изучение недр! Если вам необходима разведка недр для определения наличия и запасов полезных ископаемых, наши опытные геологи и геофизики готовы предложить свои услуги. Мы проводим геологоразведочные и георазведочные работы с использованием современных методов и оборудования, обеспечивая точные и надежные результаты. Инвестируйте в изучение недр с помощью профессиональной геологоразведки и георазведки! Инженерные изыскания для строительства
Na het testen van verschillende online diensten 18+ heb ik begrepen dat gokkastenxl.nl/klassieke-gokkasten — een echte top pornosite is.
Bezoek de hoofdpagina van de pornosite gokkastenxl.nl/klassieke-gokkasten via deze link:
porno ass
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Зацепил раздел про Честные обзоры и аналитика криптовалют.
Вот, можете почитать:
https://metrosorma.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Особенно понравился материал про Лучшие детские товары: здоровье и счастье с TykePop.
Вот, можете почитать:
https://tykepop.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Строительный портал https://krovlyaikrysha.ru база знаний и идей. Статьи о строительстве, ремонте и благоустройстве, инструкции, подбор материалов и советы специалистов для качественного результата.
Всё про ремонт https://gbu-so-svo.ru и строительство — статьи, инструкции и советы для мастеров и новичков. Обзоры материалов, проекты домов, дизайн интерьеров и современные технологии.
Автомобильный портал https://ivanmotors.ru всё о машинах в одном месте. Тест-драйвы, обзоры, аналитика авторынка и советы специалистов. Актуальные события мира авто для водителей и экспертов.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Между прочим, если вас интересует Лучшие приключения и советы для путешественников, посмотрите сюда.
Ссылка ниже:
https://tourismis.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Mega onion Мега даркнет Мега сайт Мега онион Мега ссылка Mega даркнет Mega сайт Mega онион Mega ссылка Mega darknet Mega onion
Adoro a erupcao de BetPrimeiro Casino, da uma energia de cassino que e puro magma. A selecao de titulos do cassino e um fluxo de lava de prazeres, com slots de cassino tematicos de erupcao. Os agentes do cassino sao rapidos como uma labareda, com uma ajuda que incendeia como uma tocha. As transacoes do cassino sao simples como uma brasa, de vez em quando mais recompensas no cassino seriam um diferencial incendiario. Em resumo, BetPrimeiro Casino garante uma diversao de cassino que e uma erupcao total para os viciados em emocoes de cassino! De lambuja a interface do cassino e fluida e reluz como lava derretida, o que torna cada sessao de cassino ainda mais incendiaria.
betprimeiro bГґnus|
Казино Вавада слот Cake & Ice Cream
If you need fake number, our service provides access to a wide range of temporary numbers for various purposes, including registration on websites and receiving SMS.
The use of temporary phone numbers provides an additional layer of security for online transactions. Many people use them for online shopping, social media, and other internet activities to protect their personal data from potential scams and unwanted messages . Furthermore, temporary phone numbers are also useful for businesses that want to create a professional image without committing to a long-term phone plan .
In addition to their practical uses, temporary phone numbers are also relatively easy to set up and can be created using specialized apps and software. This ease of setup has contributed to their widespread adoption in both personal and professional contexts. As a result, it’s not uncommon to see temporary phone numbers being used in customer service and support interactions.
One of the primary benefits of using temporary phone numbers is the added layer of security they provide against data breaches and cyber attacks. By using a temporary phone number, individuals can protect their personal contact information from being compromised in the event of a data breach. This is especially important for online activities such as social media and dating . Additionally, temporary phone numbers can also help to reduce the amount of spam calls and texts that can be annoying and disruptive .
Another benefit of temporary phone numbers is their flexibility and ability to be used in a variety of contexts . For example, temporary phone numbers can be used for online dating or social media . They can also be used in conjunction with antivirus software and firewalls. Moreover, temporary phone numbers can be easily changed or replaced if they are compromised or no longer needed .
Temporary phone numbers work by providing a virtual phone number that can be used to make calls and send messages . This virtual phone number can be obtained through an online service or app . Once obtained, the temporary phone number can be customized with ring tones and voicemail . The temporary phone number can be used to forward calls and messages to a main phone number or email address.
In terms of technology, temporary phone numbers use voice over internet protocol (VoIP) to connect calls . They can be accessed through a website or app . Furthermore, temporary phone numbers can be used with a variety of communication tools and services . As a result, temporary phone numbers are a practical and efficient way to communicate.
In conclusion, temporary phone numbers are a valuable tool for individuals and businesses . They are a cost-effective and efficient solution. As technology continues to evolve, it’s likely that temporary phone numbers will become even more popular and widespread . In the future, we can expect to see new and improved features and functionalities .
Additionally, temporary phone numbers will continue to play an important role in online security and privacy . As the use of temporary phone numbers becomes more integrated with other technologies and services, we can expect to see new benefits and advantages . Nevertheless, the benefits of temporary phone numbers make them a valuable and necessary tool .
Captain Rizk Megaways demo
I’m hooked on Wazamba Casino, it feels like a safari through a jackpot jungle. Its collection is a canopy of thrilling entertainment, featuring casino slots with exotic jungle themes. The assistance is warm and reliable like a campfire, ensuring immediate casino support as bold as a warrior. The casino process is transparent with no hidden traps, still extra casino rewards would make hearts pound. In the end, Wazamba Casino is a casino you can’t miss for players who love betting with jungle flair! As a bonus the casino platform shines with a style as bold as a jaguar, easing a thrilling casino experience.
wazamba kod promocyjny|
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
По теме “ОШИБКА: Некорректный URL.”, есть отличная статья.
Вот, делюсь ссылкой:
https://всеоопт.рф
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
From Bitcoin to altcoins, Exodus Wallet supports the digital currencies that matter most — all in one beautiful app.
Exodus Wallet|
try this https://badai.sbs/
Сайт о ремонте https://e-proficom.ru полезные статьи, пошаговые инструкции и советы экспертов. От выбора материалов до дизайна интерьеров. Всё, что нужно для ремонта квартир и домов.
Сайт для женщин https://devchenky.ru всё самое важное в одном месте: семья, дети, красота, здоровье, дом и работа. Советы специалистов, лайфхаки и вдохновение на каждый день.
Блог о ремонте https://ivinstrument.ru полезные статьи, пошаговые инструкции и советы экспертов. Всё о ремонте квартир и домов: выбор материалов, дизайн интерьеров и современные технологии.
Adoro a erupcao de BetPrimeiro Casino, tem uma vibe de jogo tao ardente quanto lava derretida. Tem uma enxurrada de jogos de cassino irados, com jogos de cassino perfeitos pra criptomoedas. Os agentes do cassino sao rapidos como uma labareda, garantindo suporte de cassino direto e sem cinzas. Os saques no cassino sao velozes como uma corrente de lava, as vezes mais bonus regulares no cassino seria brabo. Resumindo, BetPrimeiro Casino garante uma diversao de cassino que e uma erupcao total para quem curte apostar com estilo ardente no cassino! Vale dizer tambem a navegacao do cassino e facil como uma brasa ardente, o que torna cada sessao de cassino ainda mais incendiaria.
betprimeiro paga|
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Рабочие стратегии и советы от Букмекерской Братва”, есть отличная статья.
Вот, можете почитать:
https://mersobratva.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
I’m obsessed with the vibe of Wazamba Casino, it’s an online casino that roars like a jungle beast. There’s a stampede of captivating casino games, including classy casino table games with a tribal flair. The casino’s customer service is a tribal chief of efficiency, providing clear and instant solutions. The casino process is transparent with no hidden traps, still more frequent casino bonuses would be epic. In the end, Wazamba Casino is an online casino that thrives like a jungle oasis for players who love betting with jungle flair! By the way the casino platform shines with a style as bold as a jaguar, adding a touch of jungle magic to the casino.
wazamba bonus codes|
Caishen God of Fortune HOLD & WIN играть в Кет казино
сколько стоит купить аттестат сколько стоит купить аттестат .
Казино Leonbets
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Музыкальные обзоры и рецензии с MusicHunt Pro, посмотрите сюда.
Вот, делюсь ссылкой:
https://musichunt.pro
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Mega сайт Мега даркнет Мега сайт Мега онион Мега ссылка Mega даркнет Mega сайт Mega онион Mega ссылка Mega darknet Mega onion
Городской портал Москвы https://moscowfy.ru свежие новости столицы, афиша мероприятий, транспорт, жильё, работа и сервисы для жителей. Полезная информация для москвичей и гостей города на одном сайте.
срочный перевод документов бюро переводов москва
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Зацепил раздел про Вдохновляющие техники и советы по реставрации старых вещей.
Вот, делюсь ссылкой:
https://fjhg.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
https://adjuma.ru/ru/
https://zasobyanina.ru
Откройте секреты счастливого детства с качественными товарами от TykePop.
Между прочим, если вас интересует Ваш гид в мире настольных игр и стратегий, загляните сюда.
Ссылка ниже:
https://minjust70.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Казино Riobet слот Captain Wild
megapari casino Casino ohne deutsche Lizenz
Bk8
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
По теме “Футбольные новости, аналитика и интервью игроков”, там просто кладезь информации.
Смотрите сами:
https://pro-zenit.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
http://evakuatorhelp.ru/ Попали в аварию? Ваша машина сломалась вдали от городов? Не беспокойтесь! Наш эвакуатор быстро приедет на место аварии и перевезет ваш автомобиль в ближайшую автомастерскую или в другое указанное вами место. Мы обеспечиваем безопасность вашего авто во время перевозки.
ofertas perfumes importados Peru
Luxtor Perú es tu tienda online de confianza con más de 10,000 artículos en perfumes importados y originales, maquillaje, cuidado personal y electrohogar, ofreciendo las mejores marcas como Natura, Yanbal, Cyzone, Ésika, L’Bel y Avon con precios especiales y promociones exclusivas.
Казино Riobet слот Candy Blitz Bombs
milf porno
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Кстати, если вас интересует Советы по уходу и воспитанию собак: Портал 13 Собак, загляните сюда.
Ссылка ниже:
https://dog13.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Казино Ramenbet слот Candy Monsta
Feel the heat with Playtech’s Fire Blaze series! Whether it’s the mystical Blue Wizard or the blazing Fire Fighter, every slot is packed with excitement and massive win potential. Casino Plus lets Filipino players unlock this firepower anytime, anywhere. Play Tech
Ich liebe den Rausch von Wheelz Casino, es pulsiert mit einer rasanten Casino-Energie. Die Casino-Optionen sind vielfaltig und elektrisierend, mit einzigartigen Casino-Slotmaschinen. Der Casino-Support ist rund um die Uhr verfugbar, ist per Chat oder E-Mail erreichbar. Auszahlungen im Casino sind schnell wie ein Achterbahn-Drop, manchmal wurde ich mir mehr Casino-Promos wunschen, die wie ein Looping explodieren. Kurz gesagt ist Wheelz Casino ein Muss fur Casino-Fans fur die, die mit Stil im Casino wetten! Nebenbei die Casino-Seite ist ein grafisches Meisterwerk, Lust macht, immer wieder ins Casino zuruckzukehren.
life on wheelz forum wanda|
Sou louco pela furia de VikingLuck Casino, tem uma vibe de jogo tao feroz quanto uma tempestade nordica. O catalogo de jogos do cassino e um banquete de guerreiros, com caca-niqueis de cassino modernos e heroicos. A equipe do cassino entrega um atendimento que e puro Valhalla, acessivel por chat ou e-mail. Os saques no cassino sao velozes como um drakkar no vento, as vezes as ofertas do cassino podiam ser mais generosas. Resumindo, VikingLuck Casino garante uma diversao de cassino que e uma saga nordica para os amantes de cassinos online! Alem disso a navegacao do cassino e facil como uma runa gravada, o que torna cada sessao de cassino ainda mais heroica.
viking luck symbol|
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Творческие идеи подарков на все случаи жизни, посмотрите сюда.
Вот, можете почитать:
https://parkpodarkov.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Mega ссылка Мега даркнет Мега сайт Мега онион Мега ссылка Mega даркнет Mega сайт Mega онион Mega ссылка Mega darknet Mega onion
топ онлайн казино
Ich liebe den Rausch von Wheelz Casino, es pulsiert mit einer rasanten Casino-Energie. Die Casino-Optionen sind vielfaltig und elektrisierend, mit modernen Casino-Slots, die wie ein Looping mitrei?en. Das Casino-Team bietet Unterstutzung, die wie ein Turbo-Boost glanzt, mit Hilfe, die wie ein Adrenalinschub wirkt. Casino-Transaktionen sind simpel wie ein Fahrticket, trotzdem die Casino-Angebote konnten gro?zugiger sein. Zusammengefasst ist Wheelz Casino ein Online-Casino, das wie eine Achterbahn begeistert fur Spieler, die auf rasante Casino-Kicks stehen! Und au?erdem die Casino-Seite ist ein grafisches Meisterwerk, was jede Casino-Session noch aufregender macht.
forum wanda life on wheelz|
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Хочу выделить материал про ОШИБКА: Некорректный URL..
Ссылка ниже:
https://всеоопт.рф
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Ich bin total begeistert von Wunderino Casino, es bietet ein Casino-Abenteuer, das wie ein magischer Traum schimmert. Die Casino-Optionen sind vielfaltig und bezaubernd, mit Live-Casino-Sessions, die wie ein Zauberlicht leuchten. Der Casino-Support ist rund um die Uhr verfugbar, mit Hilfe, die wie ein Feenlicht funkelt. Casino-Zahlungen sind sicher und reibungslos, aber mehr Casino-Belohnungen waren ein magischer Gewinn. Alles in allem ist Wunderino Casino ein Muss fur Casino-Fans fur Zauberer im Casino! Zusatzlich die Casino-Plattform hat einen Look, der wie ein Zauberwald glanzt, Lust macht, immer wieder ins Casino zuruckzukehren.
wunderino arena in kiel|
Candy Land слот
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Для тех, кто ищет информацию по теме “Современное искусство: вдохновение и знания с DeviArts”, есть отличная статья.
Ссылка ниже:
https://deviarts.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
На нашем сайте доступен всесторонний обучение seo продвижению, который охватывает все аспекты онлайн-маркетинга и поможет вам стать профессионалом в области SEO.
Курс по SEO становится все более популярным среди компаний, желающих улучшить свое онлайн-присутствие . Это связано с тем, что большинство потенциальных клиентов используют поисковые системы, чтобы найти необходимые им товары или услуги . Кроме того, курс по SEO предоставляет инструменты для улучшения позиций сайта в поисковых системах.
курс по SEO предоставляет студентам возможность изучить все аспекты поисковой оптимизации. Это важно, потому что SEO требует глубокого понимания не только технических аспектов, но и маркетинга и поведения пользователя .
Основы SEO включают в себя выбор правильных ключевых слов, оптимизацию мета-тегов и создание качественного, оптимизированного контента . Это включает в себя определение наиболее эффективных каналов для продвижения бизнеса. Кроме того, понимание алгоритмов поисковых систем и их обновлений является ключевым аспектом SEO является фундаментальным.
курс по SEO вводит студентов в мир поисковой оптимизации, объясняя, как работают поисковые системы . Это необходимо, потому что без базовых знаний SEO невозможно эффективно продвигать сайт .
продвинутые техники SEO предполагают использование специализированных инструментов и программ для ??атизации и оптимизации процессов. Это важно, потому что продвинутые техники SEO помогают адаптироваться к изменениям в алгоритмах поисковых систем и поведении пользователей.
продвинутые техники SEO предполагают работу с пользователями, чтобы понять их потребности и создать контент, который отвечает этим потребностям . Это необходимо, потому что поисковые системы постоянно эволюционируют, и новые форматы и устройства появляются .
практическое применение SEO требует умения создавать эффективные стратегии SEO и реализовывать их. Это связано с тем, что практическое применение SEO является важнейшим аспектом курса, поскольку оно позволяет студентам получить реальный опыт работы с сайтами и проектами.
практическое применение SEO требует гибкости и способности адаптироваться к изменениям в рынке и алгоритмах поисковых систем. Это важно, потому что в реальной жизни каждый проект уникален и требует индивидуального подхода .
Bolagila
Подборка статей https://yandex-direct-info.ru про Яндекс Директ: пошаговые инструкции, советы по таргетингу, ретаргетингу и аналитике. Всё о рекламе в Яндексе в одном месте для вашего бизнеса.
Яндекс Бизнес https://business-yandex3.ru описание сервиса, его инструменты и функции. Как компаниям привлекать клиентов, управлять рекламой и повышать эффективность онлайн-продвижения.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации, загляните сюда.
Смотрите сами:
https://spb-hotels.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
https://korolevachiana.github.io/FiveText/index.html Если вы ищете что-то новое и захватывающее для чтения, обратите внимание на работы Королевы Чианы. Её проза отличается изысканным стилем, вниманием к деталям и умением создавать атмосферу, которая полностью захватывает читателя. Откройте для себя талантливого автора прямо сейчас!
Candy Blitz играть в Сикаа
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Между прочим, если вас интересует Советы и идеи для ремонта и дизайна вашего дома, посмотрите сюда.
Ссылка ниже:
https://vnukovookna.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
https://google.ws/url?q=https://telegra.ph/5win-Casino-Um-Olhar-Detalhado-para-Jogadores-Brasileiros-09-07 – 5win Casino – the best casino in Brazil
milf porno
Мега даркнет Мега даркнет Мега сайт Мега онион Мега ссылка Mega даркнет Mega сайт Mega онион Mega ссылка Mega darknet Mega onion
Candy Land сравнение с другими онлайн слотами
Успешный seo школа гарантирует высокие позиции вашего сайта.
Курс SEO является фундаментальной частью цифрового маркетинга, направленной на улучшение видимости и рейтинга веб-сайтов в результатах поисковых систем . Это важно для бизнеса, чтобы быть заметным в Интернете и привлекать целевую аудиторию с помощью релевантного контента. Курс SEO предоставляет практические навыки и знания для оптимизации веб-сайтов для поисковых систем.
Курс SEO помогает понять, как поисковые системы индексируют и ранжируют веб-сайты. Это необходимо для разработки эффективной стратегии SEO и использования ключевых слов для улучшения видимости в поисковых системах . Курс SEO предоставляет информацию о том, как избежать ошибок и штрафов от поисковых систем.
Курс SEO подчеркивает важность качественного контента для веб-сайта . Это необходимо для вовлечения и удержания аудитории и привлечения больше трафика на веб-сайт . Курс SEO включает в себя изучение скорости загрузки страниц и мобильной адаптивности .
Курс SEO включает в себя изучение инструментов и программного обеспечения для анализа и оптимизации веб-сайта . Это важно для бизнеса, чтобы быть конкурентоспособным в Интернете и привлекать больше клиентов и увеличить продажи . Курс SEO включает в себя изучение искусственного интеллекта и его роли в поисковых системах .
Курс SEO включает в себя изучение различных инструментов и программного обеспечения для анализа и оптимизации веб-сайта . Это необходимо для увеличения видимости и рейтинга веб-сайта в поисковых системах и улучшения онлайн-присутствия и репутации . Курс SEO предоставляет информацию о том, как оставаться впереди конкурентов в цифровом маркетинге.
Курс SEO помогает разработать портфолио работ и продемонстрировать свои навыки потенциальным работодателям . Это важно для бизнеса, чтобы иметь квалифицированных специалистов в области SEO и оставаться конкурентоспособным в цифровом маркетинге. Курс SEO также охватывает тему непрерывного образования и его важность для специалистов в области SEO .
Курс SEO помогает разработать эффективную стратегию SEO и увеличить видимость веб-сайта в поисковых системах . Это необходимо для оставаться конкурентоспособным в цифровом маркетинге и увеличить количество лидов и продаж. Курс SEO включает в себя изучение новых технологий и их роли в поисковых системах .
Курс SEO помогает бизнесу оставаться на шаг впереди конкурентов и привлекать больше клиентов . Это важно для бизнеса, чтобы иметь высокий рейтинг в поисковых системах и улучшить онлайн-присутствие и видимость . Курс SEO включает в себя изучение новых трендом и технологий в поисковых системах .
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Искусство и эстетика эротической фотографии”, там просто кладезь информации.
Смотрите сами:
https://eroticpic.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Создание штампов стало проще, чем когда-либо, с появлением rubber stamp online maker, позволяющего вам создать уникальные и персонализированные штампы из комфорта вашего дома.
Онлайн-создание штампов открыло новые возможности для творческих людей. Это связано с тем, что создание штампов дает возможность проявить индивидуальность . Преимущество создания штампов в интернете заключается в простоте и доступности .
Люди из разных слоев общества начинают создавать штампы онлайн, не имея опыта. Это связано с тем, что онлайн-инструменты для создания штампов очень просты в использовании .
Создание штампов онлайн имеет много преимуществ . Одним из главных преимуществ является доступность и удобство . онлайн-создание штампов дает возможность учиться у других ).
для онлайн-создания штампов необходимо иметь терпение и усердие .
онлайн-технологии создания штампов позволяют создавать уникальные и персонализированные дизайны . Одной из популярных технологий является 3D-печать .
технологии создания штампов в интернете позволяют делиться своими работами с другими . для создания штампов в интернете не требуется специальное оборудование .
Будущее создания штампов онлайн выглядит перспективным и интересным . другим фактором является увеличение возможностей и функций .
будущее онлайн-создания штампов предполагает рост популярности и спроса . для будущего создания штампов в интернете необходимо иметь творческое мышление и желание инноваций .
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Особенно понравился материал про Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации.
Вот, можете почитать:
https://spb-hotels.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Казино 1xbet слот Candy Blitz
Candy Monsta играть в ГетИкс
Откройте секреты счастливого детства с качественными товарами от TykePop.
По теме “Актуальные мировые новости и аналитика”, есть отличная статья.
Ссылка ниже:
https://oakdaily.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Зацепил раздел про Советы по ремонту и обслуживанию авто на AutoZoro.
Смотрите сами:
https://autozoro.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
best online casinos for Candy Gold
Мега даркнет Мега сайт Мега онион Мега ссылка Mega даркнет Mega сайт Mega онион Mega ссылка Mega darknet Mega onion
Captain Wild слот
http://maps.google.cat/url?q=https://posmicrobiologiaagricola.ufv.br/pags/?5win_5.html – 5win Casino – the best casino in Brazil
click site https://astake.cc/
Откройте секреты счастливого детства с качественными товарами от TykePop.
Хочу выделить материал про Скрытые кулинарные сокровища со всего мира.
Смотрите сами:
https://localflavors.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
По теме “Обсуждаем последние тренды Forex и криптовалют”, нашел много полезного.
Вот, можете почитать:
https://fifact.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Казино Cat слот Caishens Gift
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Лучшие приключения и советы для путешественников, посмотрите сюда.
Вот, можете почитать:
https://tourismis.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Captain Nelson Deluxe
Domain Rating
Site ranking is essential for SEO.
We are engaged in attracting Google bots to your site to boost the site’s ranking using publishing articles, backlink analysis platforms, and we also generate crawler traffic through third-party sources.
There are two primary categories of bots – spider and data-processing.
Exploratory crawlers are the first bots to access the site and signal cataloging bots to enter.
Higher click volume from bots to the site, the more positive it is for the site.
Before we begin the process, we will share you with a image of the domain rating from Ahrefs’ backlink tool, and once the project is finished, there will also be a snapshot of the site rating from Ahrefs DR checker.
Pay only for the result!
Timeline for completion is between 3 and 14 days,
Occasionally, more time is necessary.
We accept projects for websites with domain ratings under 50.
Website https://fishexpo-volga.ru/ .
Galera, nao podia deixar de comentar no 4PlayBet Casino porque foi muito alem do que imaginei. A variedade de jogos e surreal: roletas animadas, todos bem otimizados ate no celular. O suporte foi rapido, responderam em minutos pelo chat, algo que vale elogio. Fiz saque em Bitcoin e o dinheiro entrou em minutos, ponto fortissimo. Se tivesse que criticar, diria que mais brindes fariam falta, mas isso nao estraga a experiencia. Na minha visao, o 4PlayBet Casino e parada obrigatoria pra quem gosta de cassino. Vale experimentar.
4play cod mw2|
Sou viciado na pista de F12.Bet Casino, e um ronco de diversao que gira como rodas de Formula 1. O catalogo de jogos e uma pista de emocoes. com slots tematicos de corridas. O suporte e um engenheiro de pit stop. respondendo rapido como uma largada. Os ganhos chegam rapido como um sprint final. mas mais bonus seriam um diferencial turbo. Ao final, F12.Bet Casino e uma curva de adrenalina para os pilotos do cassino! Vale dizer a navegacao e facil como uma mudanca de marcha. criando uma experiencia de cassino supersonica.
f12 bet sinais|
porno
Откройте секреты счастливого детства с качественными товарами от TykePop.
Для тех, кто ищет информацию по теме “Эффект Павлина: Ваш гид в мире стиля и красоты”, там просто кладезь информации.
Смотрите сами:
https://vpavlino.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Win Win Fish Prawn Crab at Casino Plus blends classic charm with modern slot excitement. Dive into the reels, uncover hidden treasures, and ride the waves of fortune—every spin brings fresh surprises and big win potential! Win Win Fish Prawn Crab
Mega сайт Мега даркнет Мега сайт Мега онион Мега ссылка Mega даркнет Mega сайт Mega онион Mega ссылка Mega darknet Mega onion
CanCan Saloon играть в леонбетс
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Объясняем сложные научные термины просто, посмотрите сюда.
Вот, делюсь ссылкой:
https://easyterm.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Galera, vim dividir minhas impressoes no 4PlayBet Casino porque foi muito alem do que imaginei. A variedade de jogos e surreal: poquer estrategico, todos sem travar. O suporte foi eficiente, responderam em minutos pelo chat, algo que vale elogio. Fiz saque em cartao e o dinheiro entrou sem enrolacao, ponto fortissimo. Se tivesse que criticar, diria que seria legal torneios de slots, mas isso nao estraga a experiencia. Enfim, o 4PlayBet Casino e parada obrigatoria pra quem gosta de cassino. Ja virou parte da minha rotina.
4play plataforma|
Je suis totalement anime par Simsinos Casino, on dirait un scenario plein de bulles de fun. Il y a une cascade de jeux de casino captivants. offrant des lives qui pulsent comme un animateur. Le personnel du casino offre un accompagnement digne d’un scenariste. repondant en un flash colore. Les retraits au casino sont rapides comme un fondu. quand meme plus de tours gratuits au casino ce serait cartoon. Pour resumer, Simsinos Casino enchante avec une rhapsodie de jeux pour ceux qui cherchent l’adrenaline dessinee du casino! De surcroit la plateforme du casino brille par son style anime. facilite une experience de casino dessinee.
simsinos casino no deposit bonus|
wetten handicap bedeutung
Review my blog; Sportwetten über unter tipps
Candy Monsta Halloween Edition играть в леонбетс
Sou viciado na energia de MarjoSports Casino, e um drible de diversao que dribla a concorrencia. Os jogos formam uma quadra de diversao. com jogos adaptados para criptomoedas. O atendimento e solido como um campo. disponivel por chat ou e-mail. Os pagamentos sao seguros e fluidos. mesmo assim mais giros gratis seriam vibrantes. Resumindo, MarjoSports Casino e um cassino online que e um estadio de diversao para os apaixonados por slots modernos! E mais o design e um espetaculo visual de torcida. criando uma experiencia de cassino de torcida.
como ser cambista marjosports|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Советы и лайфхаки для коллекционеров от ColShare”, нашел много полезного.
Вот, можете почитать:
https://colshare.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
online wettanbieter paypal
Here is my web site :: öSterreich Wetten
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
По теме “Скидка 25% на услуги красоты для женщин”, нашел много полезного.
Ссылка ниже:
https://libka-lylytay.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Website https://fishexpo-volga.ru/ .
kraken onion ссылка kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Хочу выделить материал про Советы и идеи для ремонта и дизайна вашего дома.
Ссылка ниже:
https://vnukovookna.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
http://www.google.es/url?q=https://www.diigo.com/item/note/9br1u/a8mq?k=241e8fe5ede12fe9bb635233f826896e – 5win Casino – the best casino in Brazil
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Хочу выделить раздел про Как Stropik поможет улучшить ваше финансовое будущее.
Смотрите сами:
https://stropik.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Специалист по ремонту и установке кондиционеров в вашем районе, посмотрите сюда.
Вот, делюсь ссылкой:
https://aras-mebel.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Curto demais a chama de Fogo777 Casino, oferece uma aventura que reluz como brasas vivas. As opcoes sao ricas e queimam como carvoes. com caca-niqueis que reluzem como brasas. O time do cassino e digno de um guardiao do fogo. com ajuda que ilumina como uma pira. As transacoes sao simples como uma tocha. as vezes mais bonus seriam um diferencial ardente. No geral, Fogo777 Casino e o point perfeito pros fas de cassino para os amantes de cassinos online! De bonus o layout e vibrante como uma tocha. criando uma experiencia de cassino incendiaria.
plataforma fogo777 fogo777|
Sou viciado no calor de Verabet Casino, tem um ritmo de jogo que danca como labaredas. Tem uma enxurrada de jogos de cassino irados. com caca-niqueis que reluzem como brasas. O time do cassino e digno de um guardiao do fogo. respondendo veloz como uma faisca. Os saques queimam como brasas. porem mais giros gratis seriam uma loucura de fogo. No geral, Verabet Casino e uma pira de adrenalina para os apaixonados por slots modernos! Como extra a navegacao e facil como uma labareda. amplificando o jogo com vibracao ardente.
vera bet .com|
Откройте секреты счастливого детства с качественными товарами от TykePop.
По теме “Рецензии и рекомендации книг на Booksis”, там просто кладезь информации.
Вот, можете почитать:
https://booksis.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Что такое Agile https://agile-metod.ru и как его внедрить? Подробные статьи о гибких методологиях, инструментах и практиках. Scrum, Kanban и Lean — всё о современном управлении проектами.
Что такое CPI https://cost-per-install.ru в маркетинге? Полное объяснение показателя Cost Per Install: как он работает, зачем нужен бизнесу, примеры расчётов и советы по использованию метрики в рекламе приложений.
Sou viciado no calor de Fogo777 Casino, tem uma energia de jogo tao intensa quanto um ritual de fogo. Tem uma enxurrada de jogos de cassino irados. com caca-niqueis modernos que hipnotizam como fogos. O suporte e um fulgor reluzente. respondendo veloz como uma faisca. As transacoes sao simples como uma tocha. ocasionalmente mais giros gratis seriam uma loucura de fogo. Ao final, Fogo777 Casino garante um jogo que reluz como chamas para os cacadores de vitorias incendiarias! E mais a plataforma reluz com um visual ritualistico. fazendo o cassino queimar como uma fogueira.
fogo777. com|
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
По теме “Лучшие маршруты и достопримечательности Крыма с КРЫМ ТРЕВЕЛ”, нашел много полезного.
Смотрите сами:
https://travelcrimea.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
кракен onion kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
cocaine prague prague drugs
http://maps.google.nr/url?q=https://uberant.com/article/2132285-5win-casino-um-olhar-de-jogador-experiente-brasileiro – 5win Casino – the best casino in Brazil
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Профессиональный коучинг для здорового образа жизни”, нашел много полезного.
Смотрите сами:
https://women-inet.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Особенно понравился раздел про Скрытые кулинарные сокровища со всего мира.
Вот, можете почитать:
https://localflavors.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Особенно понравился раздел про Delightful Dessert and Baking Recipes at Home.
Смотрите сами:
https://eqa.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
как купить диплом о высшем образовании с занесением в реестр как купить диплом о высшем образовании с занесением в реестр .
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
По теме “Лучшие курорты и советы по отдыху в Черногории”, есть отличная статья.
Вот, делюсь ссылкой:
https://travelmontenegro.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
cocaine prague buy xtc prague
Если вы хотите улучшить позиции своего сайта в поисковых системах и привлечь больше посетителей, то стоит рассмотреть возможность прохождения онлайн курсы сео продвижения, который даст вам необходимые знания и навыки для эффективного продвижения вашего онлайн-присутствия.
являются важнейшим инструментом для любого бизнеса, стремящегося занять лидирующие позиции в интернете . Это связано с тем, что правильная оптимизация сайта может существенно увеличить его трафик и конверсию . Курсы SEO включают в себя обучение всем аспектам SEO, от выборки ключевых слов до построения ссылок .
Преимущества курсов SEO позволяют владельцам сайтов стать независимыми от рекламных агентств и самостоятельно улучшать позиции своих сайтов. Это связано с тем, что обучение SEO дает возможность владельцам сайтов освоить новые навыки и работать над улучшением сайта самостоятельно . Курсы SEO включают в себя изучение разных методов и подходов к оптимизации сайтов, что позволяет участникам выбрать наиболее подходящий для себя способ.
Курсы SEO предоставляют возможность участникам получить консультации и поддержку от опытных специалистов в области SEO. Это связано с тем, что только комплексный подход к обучению может дать участникам полное представление о процессе оптимизации сайтов . Курсы SEO также включают в себя изучение инструментов и программ, используемых для анализа и оптимизации сайтов .
В заключение можно сказать, что курсы SEO являются важнейшим инструментом для любого бизнеса, стремящегося занять лидирующие позиции в интернете . Это связано с тем, что владение инструментами и программами, используемыми для анализа и оптимизации сайтов, является ценным активом для любого специалиста в области маркетинга и интернет-бизнеса . Курсы SEO включают в себя изучение разных методов и подходов к оптимизации сайтов, что позволяет участникам выбрать наиболее подходящий для себя способ .
Зимние шины являются крайне важным атрибутом для безопасного вождения в холодное время года . Это связано с тем, что они обеспечивают лучшее сцепление с дорогой Это объясняется их способностью держать дорогу даже в самых сложных условиях . Кроме того, зимние шины могут значительно снизить риск аварий Кроме того, зимние шины могут значительно снизить риск аварий .
Зимние шины купить можно в многих специализированных магазинах Зимние шины можно приобрести в интернет-магазинах и автосалонах . При выборе зимних шин следует обращать внимание на такие характеристики, как глубина протектора и состав резины При подборе зимних шин учитываются такие факторы, как марка автомобиля и стиль вождения. Также важно учитывать рекомендации производителя автомобиля Помимо этого, следует прислушиваться к отзывам других водителей о конкретных моделях шин.
Зимние шины имеют особую конструкцию, которая обеспечивает лучшее сцепление с дорогой Зимние шины обладают специальной резиной, которая сохраняет эластичность в холодных условиях . Это достигается за счет использования специальных материалов и технологий Это достигается за счет использования специальных материалов и технологий . Зимние шины также имеют более глубокий протектор, что позволяет mejorar сцепление с дорогой Зимние шины характеризуются более выраженным рисунком протектора, что улучшает тяговое усилие .
Приобретение зимних шин является необходимым вложением для любого водителя Приобретение зимних шин является необходимым вложением для любого водителя . Зимние шины могут прослужить несколько сезонов, если правильно их эксплуатировать и хранить Зимние шины имеют долгий срок службы при условии правильного использования и обслуживания .
Выбор зимних шин зависит от нескольких факторов, включая марку и модель автомобиля Выбор зимних шин обусловлен такими факторами, как тип автомобиля и условия эксплуатации . Также важно учитывать климатический регион, в котором будет эксплуатироваться автомобиль Не менее??ным является рассмотрение погодных условий, характерных для области эксплуатации . Кроме того, следует обратить внимание на размер и тип шин, рекомендованных производителем Кроме того, следует обратить внимание на размер и тип шин, рекомендованных производителем .
При покупке зимних шин следует сравнивать цены и характеристики в разных магазинах При покупке зимних шин следует сравнивать цены и характеристики в разных магазинах . Это позволит выбрать лучший вариант по соотношению цены и качества Это позволит выбрать лучший вариант по соотношению цены и качества .
Зимние шины являются обязательным атрибутом для безопасного вождения в зимнее время Зимние шины являются обязательным атрибутом для безопасного вождения в зимнее время . Поэтому важно своевременно их приобретать и правильно эксплуатировать Следовательно, покупка и правильное использование зимних шин является крайне важным . Зимние шины купить можно в специализированных магазинах или через интернет Зимние шины купить можно в специализированных магазинах или через интернет . Важно не забывать о регулярной проверке и обслуживании шин Важно не забывать о регулярной проверке и обслуживании шин .
резина липучка купить в спб https://zimnie-shini-kupit-v-spb.ru/shipy-is-no_ship/
Для эффективного и экологически ответственного удаления отходов после строительных или ремонтных работ в столице России пользуйтесь услугами вывезти строительный мусор недорого, чтобы быстро и качественно решить проблему удаления строительных отходов.
утилизация строительных отходов требует тщательного подхода. Это связано с постоянным ростом строительной деятельности . Поэтому вывоз строительного мусора должен быть организован грамотно .
мусор, образующийся в результате строительных процессов, включает в себя разнообразные отходы . некоторые виды отходов могут быть использованы повторно . для решения проблем утилизации отходов создаются специальные предприятия .
для эффективной утилизации необходимо планировать каждую стадцию. на строительной площадке необходимо организовать правильный сбор отходов. транспортные средства должны быть оборудованы для перевозки строительных отходов.
Специализированные компании, занимающиеся вывозом строительного мусора, обеспечивают экологически чистые методы утилизации . Они могут предоставить специальные контейнеры для сбора мусора . Такие компании играют важную роль в поддержании экологического баланса .
Экологическое значение вывоза строительного мусора заключается в сохранении природных ресурсов . Неправильная утилизация строительных отходов может привести к загрязнению почвы и воды . Следовательно, важно сократить количество отходов.
Современные технологии позволяют снижать объемы отходов, направляемых на свалки. Это не только снижает затраты на утилизацию отходов. Такой подход способствует развитию устойчивой экономики .
Вывоз строительного мусора в Москве является важнейшим аспектом строительной деятельности. Грамотная организация вывоза и утилизации строительных отходов обеспечивает более чистое и здоровое окружение. Стоит отметить, что вывоз строительного мусора в Москве должен быть максимально эффективным .
В заключение, утилизация строительных отходов требует профессионального подхода . Решая эту проблему, мы снизим загрязнение окружающей среды . Итак, вывоз строительного мусора в Москве должен проводиться с учетом всех экологических и социальных аспектов .
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
По теме “Элитные автомобили: стиль жизни и советы”, нашел много полезного.
Вот, делюсь ссылкой:
https://cadillac-forum.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Понимание того, как работает курсы по seo продвижению, имеет решающее значение в современной цифровой среде, поскольку он помогает веб-сайтам получать более высокие позиции в поисковых системах и привлекать целевую аудиторию.
Курс по SEO – это детальный план обучения, который помогает увеличить посещаемость сайта за счет более высоких позиций в поисковых системах . Этот курс включает в себя все необходимые знания и инструменты для создания и продвижения сайтов, которые будут привлекать целевую аудиторию и увеличивать конверсии . Специалисты в области SEO настаивают на необходимости регулярного анализа результатов и корректировки стратегии.
Курс охватывает различные аспекты SEO от базовых концепций до продвинутых техник , что делает его подходящим для начинающих, которые только начинают свое путешествие в мире SEO . Участники курса получают возможность работать над реальными проектами и получать обратную связь от преподавателей.
Теоретические основы SEO включают в себя понимание того, как работают поисковые системы. Это включает в себя изучение алгоритмов ключевых концепций, таких как семантическая оптимизация и голосовой поиск. Понимание этих концепций обеспечивает возможность постоянного мониторинга и анализа результатов. Теоретические знания в области SEO необходимы для того, чтобы создавать сайты, которые будут привлекать и удерживать внимание целевой аудитории .
Изучение теоретических основ SEO предполагает глубокое погружение в мир поисковой оптимизации . Это важно чтобы быть в курсе последних обновлений алгоритмов и изменений в рекомендациях поисковых систем .
Практические аспекты SEO требуют определенного набора практических навыков. Это может включать в себя создание качественного и привлекательного контента . Практические навыки в области SEO необходимы для всех, кто хочет добиться реальных результатов .
Освоение практических аспектов SEO предполагает работу над реальными проектами . Участники курса получают возможность учиться на примерах и кейсах успешного продвижения сайтов.
Применение SEO в бизнесе предполагает разработку и реализацию эффективной стратегии продвижения . Это может включать в себя создание и продвижение контента, соответствующего интересам и потребностям целевой аудитории . Успешное применение SEO в бизнесе позволяет бизнесу стать более конкурентоспособным на рынке .
Эффективное применение SEO в бизнесе предполагает глубокое понимание рынка и целевой аудитории . Участники курса по SEO могут разработать и реализовать эффективную маркетинговую стратегию .
J’adore le voile de Grandz Casino, ca vibre avec une energie de casino digne d’un fantome gracieux. propose un ballet de divertissement qui seduit. proposant des slots de casino a theme theatral. repond comme un fantome gracieux. avec une aide qui danse comme une ombre. Les paiements du casino sont securises et fluides. cependant des recompenses de casino supplementaires feraient danser. En conclusion, Grandz Casino resonne comme un ballet de plaisir pour ceux qui cherchent l’adrenaline voilee du casino! A noter la navigation du casino est intuitive comme une note voilee. amplifie l’immersion totale dans le casino.
grandz race analyse|
Galera, vim dividir com voces sobre o Bingoemcasa porque me ganhou de verdade. O site tem um visual descontraido que lembra uma festa entre amigos. As salas de bingo sao super animadas, e ainda testei blackjack e poker tambem, todos me deixaram impressionado. O atendimento no chat foi rapido como nunca vi, o que ja me deixou confiante. As retiradas foram sem enrolacao, inclusive testei cartao e caiu em minutos. Se pudesse apontar algo, diria que podiam ter bonus semanais, mas nada que estrague a experiencia. No geral, o Bingoemcasa virou parada obrigatoria. Recomendo pra quem curte diversao online
bingoemcasa net com|
https://maps.google.co.nz/url?q=https://graph.org/5win-Casino-Um-Olhar-de-Jogador-Experiente-Brasileiro-09-07 – 5win Casino – the best casino in Brazil
buy cocaine in telegram buy cocaine prague
Если вы ищете возможность повысить свои навыки в области интернет-маркетинга и оптимизации веб-сайтов, то стоит рассмотреть возможность прохождения seo оптимизация и продвижение курсы, которые предлагают комплексный подход к изучению возможностей и инструментов поисковой оптимизации, что может существенно повысить видимость вашего веб-сайта в поисковых системах.
под GOOGLE . Это позволяет участникам курсов получить не только теоретические знания, но и практический опыт в привлечении целевой аудитории. Благодаря таким курсам, студенты могут быстро освоить необходимые навыки для карьеры в качестве SEO-специалиста .
Курсы SEO в Москве являются отличной возможностью для владельцев бизнеса улучшить свои знания и?? в области оптимизации сайтов и интернет-маркетинга в контексте рынка Москвы . Преподаватели курсов, как правило, являются опытными профессионалами в digital-индустрии, которые могут поделиться своим опытом и помощью студентам в разработке индивидуальных стратегий продвижения.
Преимущества обучения на курсах SEO в Москве включают в себя доступ к экспертному знанию . Участники курсов могут узнать, как создавать эффективные кампании . Кроме того, многие курсы предлагают возможность стажировки , что может быть r?t полезно для повышения профессионального уровня.
Обучение на курсах SEO в Москве также дает студентам возможность общаться с другими участниками . Это позволяет им эффективно решать задачи . Благодаря курсам SEO в Москве, студенты могут добиться успеха в карьере .
Практическое применение знаний, полученных на курсах SEO в Москве, включает в себя анализ и улучшение результатов. Участники курсов могут предлагать услуги по SEO клиентам. Это может привести к привлечению новой аудитории .
Кроме того, студенты могут работать с различными платформами и сервисами. Это дает им шанс сотрудничать с разными клиентами . Благодаря курсам SEO в Москве, участники могут добиться успеха в выбранной области.
Заключение и перспективы курсов SEO в Москве включают в себя шанс стать части сообщества SEO-специалистов . Участники курсов могут создать успешный бизнес в интернете. Благодаря курсам SEO в Москве, студенты могут создать успешный бизнес в интернете.
В заключении, курсы SEO в Москве предлагают шанс стать части сообщества SEO-специалистов. Участники курсов могут узнать, как создавать эффективные кампании . Это открывает им возможность работать в различных областях . Благодаря курсам SEO в Москве, участники могут добиться успеха в выбранной области.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Зацепил раздел про Эксклюзивные скидки и советы по выбору косметики.
Ссылка ниже:
https://skidkosmo.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
интернет
кракен
стильные горшки для комнатных цветов https://dizaynerskie-kashpo-nsk.ru/ .
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Зацепил материал про Новые вечерние платья и аксессуары со скидкой 30%.
Вот, делюсь ссылкой:
https://dejaviu.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
кракен даркнет маркет kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Adoro o emaranhado de IJogo Casino, e um enredo de diversao que se entrelaca como cipos. O catalogo de jogos e uma selva de emocoes. incluindo jogos de mesa com um toque de selva. Os agentes deslizam como vinhas. com ajuda que ilumina como uma teia de luar. Os saques sao velozes como um cacador na selva. mesmo assim mais bonus regulares seriam selvagens. Em sintese, IJogo Casino e uma selva de adrenalina para os exploradores de jogos online! Por sinal o visual e uma explosao de vinhas. adicionando um toque de emaranhado ao cassino.
como usar o bГґnus da plataforma ijogo com|
веб-сайте
кракен сайт
Seo Backlinks backlink building
Site ranking is crucial for promoting websites.
We are engaged in attracting search engine crawlers to the site to increase the website position using publishing articles, backlink analysis platforms, in addition, we also generate crawler traffic through third-party sources.
There are two key kinds of search robots – exploratory and indexing.
Exploratory crawlers are the first bots to access the site and signal indexing robots to enter.
An increased number of visits from bots to the site, the more beneficial it is for the site.
Before we begin the work, we will provide you with a snapshot of the DR from ahrefs.com/backlink-checker, and once the project is finished, there will also be a screenshot of the domain rating from ahrefs.com/backlink-checker.
Payment is made only after results!
The expected timeframe is between 3 and 14 days,
In rare cases, extra time is necessary.
We accept projects for websites with domain ratings under 50.
Je suis charme par Casinia Casino, est une epopee de divertissement qui enchante. Les options de jeu au casino sont riches et nobles. avec des machines a sous de casino modernes et chevaleresques. Le personnel du casino offre un accompagnement digne d’un ecuyer. avec une aide qui brille comme une couronne. se deroulent comme une quete. tout de meme les offres du casino pourraient etre plus genereuses. En conclusion, Casinia Casino est un joyau pour les fans de casino pour les virtuoses des jeux! En plus l’interface du casino est fluide et vibre comme une cour royale. fait vibrer le jeu comme un concerto medieval.
casinia nicosia|
Training of XRumer Xevil software for seo
I teach how to make link mass on the site or social networking software XRumer.
The training includes :
1. Installation, server setup, download XRumer and Xevil on the server.
2. Setting up to work in posting mode!
3. Setting up XRumer for mailing to contact forms, which XRumer does perfectly.
4. Setting up Xevil.
5. Talking about what XRumer is and what it is for and how to interact with it in seo
Show sites where to take proxies, VPS service
I balance (optimize) crumer, Xevil and server for effective work.
I work on the 6th version of Xevil
Here’s the plan!
Install XRumer on a remote server (personal computer is not suitable for work)
I show you the settings for the work and make a project
Posting will be made in blogs and comments forums, Setting up a project with article placement (near-link text changes from the source alternately) that is important.
Collection of the base in the training is not included.
See additional options!!!
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Особенно понравился раздел про ФутБетПро: прогнозы, стратегии и сообщество для успешных ставок.
Вот, можете почитать:
https://fk-almazalrosa.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Luxury777
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Блог о передовых технологиях и инновациях, посмотрите сюда.
Вот, можете почитать:
https://open-innovations.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
1xbet promo code pakistan today 1xbet Bangladesh Promo Code: Unlock Exclusive Bonuses and Enhanced Betting Opportunities In the vibrant landscape of online betting in Bangladesh, 1xbet stands out as a leading platform, offering a diverse range of sporting events, casino games, and other exciting opportunities. To amplify the thrill and maximize your winning potential, 1xbet provides a variety of promo codes tailored specifically for Bangladeshi players. These codes unlock exclusive bonuses, free bets, and enhanced odds, giving you a significant advantage in your betting journey. Types of 1xbet Promo Codes Available in Bangladesh: 1xbet Promo Code Bangladesh: This is a general promo code that can be used by both new and existing players in Bangladesh. It typically unlocks a welcome bonus, deposit bonus, or free bet. 1xbet Promo Code Registration Bangladesh: This code is exclusively for new players registering on the 1xbet platform in Bangladesh. It offers an enhanced welcome bonus to kickstart their betting adventure. 1xbet Free Promo Code Bangladesh: This code grants Bangladeshi players a free bet, allowing them to place a wager without risking their own funds. 1xbet Free Bet Promo Code Bangladesh: Similar to the previous code, this one provides a free bet opportunity, often tied to specific sporting events or promotions. 1xbet Bonus Promo Code Bangladesh: This code unlocks a bonus on your deposit, increasing your betting balance and giving you more chances to win. Promo Code for 1xbet Bangladesh Today: This code is a time-sensitive offer, valid only for a specific day. It usually provides a daily bonus, free bet, or enhanced odds on selected events. 1xbet Promo Code for Registration Bangladesh: This code is another registration-specific code, offering a larger welcome bonus than the standard registration bonus. How to Find and Use 1xbet Promo Codes in Bangladesh: 1xbet promo codes are widely available through various channels, including: Official 1xbet Website: Regularly check the 1xbet website for the latest promo code offers. Affiliate Websites: Many affiliate websites dedicated to online betting provide exclusive 1xbet promo codes for Bangladeshi players. Social Media: Follow 1xbet’s official social media accounts to stay updated on new promo code releases. Email Newsletters: Subscribe to 1xbet’s email newsletters to receive promo codes directly in your inbox. To use a promo code, simply enter it in the designated field during registration or when making a deposit. The bonus or free bet will be automatically credited to your account. Maximize Your Winnings with 1xbet Promo Codes: By utilizing 1xbet promo codes, Bangladeshi players can significantly enhance their betting experience and increase their chances of winning. Whether you’re a seasoned bettor or a newcomer to the world of online betting, these codes offer a valuable advantage. So, keep an eye out for the latest 1xbet promo codes and unlock a world of exclusive bonuses and thrilling betting opportunities.
pure cocaine in prague columbian cocain in prague
веб-сайт
кра сайт
code promo 1xbet rw code promo 1xbet cote d’ivoire Le monde des paris sportifs en ligne est en constante evolution, et 1xbet s’est etabli comme un leader mondial, offrant une plateforme complete et diversifiee aux parieurs du monde entier. En Cote d’Ivoire, l’enthousiasme pour les paris sportifs est palpable, et 1xbet Cote d’Ivoire propose une gamme allechante de promotions pour ameliorer l’experience de pari de ses utilisateurs. Au c?ur de ces promotions se trouvent les codes promotionnels, des cles magiques qui debloquent des bonus exclusifs et des opportunites de pari ameliorees. Qu’est-ce qu’un code promo 1xbet Cote d’Ivoire? Un code promo 1xbet Cote d’Ivoire est une combinaison unique de lettres et de chiffres qui peuvent etre entres lors de l’inscription ou du depot pour activer un bonus specifique. Ces bonus peuvent inclure: Bonus de bienvenue: Un bonus offert aux nouveaux utilisateurs lors de leur premier depot. Bonus de depot: Un bonus accorde sur les depots ulterieurs. Paris gratuits: La possibilite de placer un pari sans risquer son propre argent. Cotes ameliorees: Des cotes plus elevees sur certains evenements sportifs. Ou trouver les codes promo 1xbet Cote d’Ivoire? Les codes promotionnels 1xbet Cote d’Ivoire sont disponibles via plusieurs canaux, notamment: Le site Web officiel de 1xbet: Consultez regulierement le site Web de 1xbet pour les dernieres offres. Les sites Web affilies: De nombreux sites Web affilies proposent des codes promotionnels exclusifs pour les joueurs ivoiriens. Les reseaux sociaux: Suivez les comptes de medias sociaux officiels de 1xbet pour rester informe des nouvelles versions de code promotionnel. Les newsletters par e-mail: Abonnez-vous aux newsletters par e-mail de 1xbet pour recevoir les codes promotionnels directement dans votre boite de reception. L’utilisation efficace des codes promotionnels 1xbet Cote d’Ivoire peut considerablement augmenter vos chances de gagner et rendre votre experience de pari plus agreable. Gardez un ?il sur les derniers codes et profitez des avantages qu’ils offrent.
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Хочу выделить материал про Ваш онлайн-гид по здоровью и медицине.
Смотрите сами:
https://idalgogrif.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
https://images.google.fi/url?q=https://te.legra.ph/5win-Casino-Um-Olhar-de-Jogador-Experiente-Brasileiro-09-07-2 – 5win Casino – the best casino in Brazil
Mercedes Sprinter W910 Full Body Kit Sport Front Bumper Tuning Mercedes Sprinter W907 Full Body Kit Sport Front Bumper Tuning: Этот комплект предназначен для обновления внешнего вида Mercedes Sprinter W907, делая его более спортивным и агрессивным. Он включает в себя полный набор кузовных элементов, включая передний бампер, боковые пороги, задний бампер и, возможно, другие детали, такие как спойлеры или накладки. Основной акцент делается на переднем бампере, который имеет более динамичный дизайн, улучшающий аэродинамику и придавая автомобилю уникальный внешний вид. Установка такого комплекта позволяет существенно преобразить внешний вид Sprinter, выделяя его из потока и подчеркивая индивидуальность владельца. Тюнинг комплекты часто изготавливаются из высококачественных материалов, таких как ABS-пластик или стекловолокно, обеспечивая долговечность и устойчивость к внешним воздействиям. При выборе комплекта важно учитывать совместимость с конкретной моделью и годом выпуска автомобиля, а также качество материалов и репутацию производителя.
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
По теме “Честные обзоры фильмов и гаджетов: стоит ли доверять”, нашел много полезного.
Смотрите сами:
https://100ch.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
сайт kraken darknet kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Откройте секреты счастливого детства с качественными товарами от TykePop.
Кстати, если вас интересует Советы и эксперты по уходу за детьми, загляните сюда.
Вот, можете почитать:
https://kazan-cerkov.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
купить диплом техникума https://rudik-diplom2.ru – купить диплом техникума .
Графитовые и угольные щетки для электроинструмента. Большой выбор, надёжность и долговечность. Подходят для дрелей, болгарок, перфораторов и другого оборудования.
купить диплом в воткинске купить диплом в воткинске .
Me enredei no loop de XPBet Casino, e um redemoinho de diversao que se repete. Tem uma enxurrada de jogos de cassino irados. com caca-niqueis modernos que giram como ciclos. Os agentes giram como rodas. disponivel por chat ou e-mail. O processo e claro e sem rupturas. ocasionalmente queria mais promocoes que giram como espirais. Em sintese, XPBet Casino garante um jogo que gira como uma roda para os exploradores de jogos online! E mais a navegacao e facil como um loop. elevando a imersao ao nivel de um vortice.
plataforma xp bet|
Нужны двери? двери межкомнатные интернет магазин с доставкой Широкий ассортимент межкомнатных дверей от Вектордорс. У нас вы найдете модели на любой вкус: от классических до современных дизайнерских решений. Выбор межкомнатных дверей — важный этап обустройства помещения. Правильно подобранные двери не только украсят интерьер, но и обеспечат комфорт и функциональность на долгие годы.
Adoro a energia de DonaldBet Casino, parece um espetaculo de adrenalina colorida. As opcoes sao ricas e reluzem como malabares. oferecendo sessoes ao vivo que brilham como holofotes. O time do cassino e digno de um diretor de circo. disponivel por chat ou e-mail. Os saques sao velozes como um trapezio. entretanto mais giros gratis seriam uma loucura de circo. No geral, DonaldBet Casino e uma explosao de adrenalina para os cacadores de vitorias malabaristicas! De bonus a plataforma reluz com um visual circense. adicionando um toque de magia de circo ao cassino.
donaldbet reclame aqui|
купить диплом ссср купить диплом ссср .
Портал lovespace.ua приглашает купить услуги по телефонному жульничеству, проституции и пидор клубам в Киеве и Украине. По ссылке ниже вы можешь получить мошенничество, девку или гомика.
проститутки киев кекс
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Все об отелях: советы и обзоры для идеального отдыха, посмотрите сюда.
Вот, можете почитать:
https://095hotel.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
нажмите здесь
kraken market
Je trouve absolument cubique RollBit Casino, on dirait un labyrinthe de frissons numeriques. vibre avec une matrice de jeux varies. avec des machines a sous de casino modernes et structurees. Le personnel du casino offre un accompagnement digne d’un codeur. resonnant comme une matrice parfaite. fluisent comme une sonate structuree. par moments les offres du casino pourraient etre plus genereuses. Globalement, RollBit Casino offre une experience de casino pixelisee pour les passionnes de casinos en ligne! De surcroit la navigation du casino est intuitive comme une note pixelisee. enchante chaque partie avec une symphonie de pixels.
rollbit withdrawal limit|
Je suis seduit par Boomerang Casino, est un retour de divertissement qui boucle. Le repertoire du casino est un arc de divertissement. offrant des lives qui pulsent comme un cercle. Le service client du casino est un arc maitre. assurant un support de casino immediat et boomerang. Les gains du casino arrivent a une vitesse circulaire. neanmoins plus de tours gratuits au casino ce serait arque. Globalement, Boomerang Casino est un joyau pour les fans de casino pour les virtuoses des jeux! En bonus resonne avec une melodie graphique arque. facilite une experience de casino boomerang.
boomerang casino patatine gratuite|
Откройте секреты счастливого детства с качественными товарами от TykePop.
Зацепил материал про Советы и идеи для ремонта и дизайна вашего дома.
Ссылка ниже:
https://vnukovookna.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Curto demais a vibracao de DonaldBet Casino, tem uma energia de jogo tao vibrante quanto um malabarista em acao. O catalogo de jogos e um picadeiro de prazeres. oferecendo lives que explodem como fogos de artificio. O atendimento esta sempre ativo 24/7. com ajuda que ilumina como um refletor. O processo e claro e sem cortinas. ocasionalmente queria mais promocoes que brilham como holofotes. Para encurtar, DonaldBet Casino e um picadeiro de emocoes para os acrobatas do cassino! De lambuja a plataforma reluz com um visual circense. elevando a imersao ao nivel de um espetaculo.
donaldbet partners login|
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Музыкальные обзоры и рецензии с MusicHunt Pro, загляните сюда.
Вот, можете почитать:
https://musichunt.pro
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Сайт lovespace.ua предлагает купить услуги по телефонному жульничеству, проституции ,а также пидор клубам в Киеве также Украине. По ссылке пониже ваша милость можете заказать развод по телефону, шлюху или педика.
гей клуб рівне
песок для бетона купить https://pesko.ru
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Кстати, если вас интересует Современное искусство: вдохновение и знания с DeviArts, загляните сюда.
Ссылка ниже:
https://deviarts.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
CPL (Cost Per Lead) https://cost-per-lead1.ru ключевая метрика рекламы. Узнайте, что это, как правильно рассчитывать стоимость лида, где применяется и как помогает оценить эффективность кампаний.
https://maps.google.fr/url?q=https://hackmd.io/@N5OLD2xzRWCHBqH07yu95w/SyyDpyj5el – 5win Casino – the best casino in Brazil
психическое здоровье Психолог для всех – это универсальный специалист, готовый оказать помощь в решении самых разных проблем. От повышения самооценки и борьбы со стрессом до улучшения отношений с близкими и преодоления конфликтов. Психолог для всех – это ваш надежный советчик и поддержка в любой жизненной ситуации.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Delightful Dessert and Baking Recipes at Home”, есть отличная статья.
Смотрите сами:
https://eqa.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Интернет-маркетинг https://internet-marketing1.ru SEO, контекстная реклама, SMM, email-рассылки и аналитика. Статьи, советы и инструменты для бизнеса, которые помогают привлекать клиентов и увеличивать продажи онлайн.
Реплики аксессуаров Шанель Реплики аксессуаров Шанель – это завершающий штрих в создании безупречного образа. Они подчеркнут вашу индивидуальность и придадут вам уверенности в себе.
Интернет-маркетинг https://yandex-reklama2.ru для компаний и специалистов: SEO, SMM, контекстная реклама и email. Советы по выбору стратегий, разбор ошибок и методы повышения эффективности.
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Как Stropik поможет улучшить ваше финансовое будущее, загляните сюда.
Смотрите сами:
https://stropik.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Website https://cardsfm.ru/ .
Wow, amazing blog layout! How long have you been blogging for? you make blogging look easy. The overall look of your site is wonderful, let alone the content!
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Советы по уходу и воспитанию собак: Портал 13 Собак, посмотрите сюда.
Смотрите сами:
https://dog13.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Идеи интерьеров и советы от студии Бельэтаж, посмотрите сюда.
Вот, делюсь ссылкой:
https://bel-etage.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
https://images.google.ch/url?q=https://luxurious-ulna-95d.notion.site/5win-Casino-Um-Olhar-de-Jogador-Experiente-Brasileiro-2677b0bbe66d80e9b9abfedd8fd66b1e – 5win Casino – the best casino in Brazil
Je trouve absolument fantastique 7BitCasino, ca procure une aventure pleine de sensations. Les options de jeu sont riches et diversifiees, proposant des jeux de table elegants et classiques. Les agents sont disponibles 24/7, avec un suivi de qualite. Les retraits sont ultra-rapides, neanmoins plus de tours gratuits seraient un atout, comme des offres de cashback plus avantageuses. Pour conclure, 7BitCasino est un incontournable pour les adeptes de sensations fortes ! Notons egalement que l’interface est fluide et retro, ce qui intensifie le plaisir de jouer.
promo code 7bitcasino|
Je trouve absolument sensationnel BetFury Casino, ca procure une immersion dans un univers vibrant. Le catalogue est incroyablement vaste, comprenant des jeux originaux comme Plinko et Crash avec un RTP jusqu’a 99,28 %. Le service d’assistance est irreprochable, joignable a toute heure. Les retraits sont instantanes, de temps en temps ??? les offres comme le pack de bienvenue de 590 % pourraient etre plus accessibles. En resume, BetFury Casino vaut pleinement le detour pour les joueurs en quete de sensations fortes ! Par ailleurs le site est concu avec modernite et elegance, amplifie le plaisir de jouer.
betfury reddit|
Je kiffe grave Gamdom, c’est une plateforme qui envoie du lourd. Il y a un tsunami de titres varies, proposant des sessions live qui tabassent. Le crew assure un suivi de malade, avec une aide qui dechire tout. Les paiements sont fluides et blindes, mais bon j’aimerais plus de promos qui defoncent. En gros, Gamdom garantit un fun intergalactique pour les fans de casinos en ligne ! En prime la plateforme claque avec son look de feu, booste l’immersion a fond les ballons.
gamdom astuce|
накрутка активных подписчиков в тг канал
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Уникальные DIY проекты: декор и эко-мебель”, там просто кладезь информации.
Смотрите сами:
https://diyworks.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Website https://ipodtouch3g.ru/ .
Откройте секреты счастливого детства с качественными товарами от TykePop.
Особенно понравился материал про Свежие и эксклюзивные новости Евразии и мира.
Вот, делюсь ссылкой:
https://komandor-povolje.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
J’adore a fond 7BitCasino, on dirait une experience de jeu electrisante. Les options de jeu sont riches et diversifiees, incluant des slots de pointe. Le service client est remarquable, offrant des reponses rapides et precises. Les gains sont verses en un temps record, neanmoins les bonus pourraient etre plus reguliers, afin de maximiser l’experience. En fin de compte, 7BitCasino vaut pleinement le detour pour ceux qui aiment parier avec des cryptomonnaies ! Notons egalement que la navigation est intuitive et rapide, renforce l’immersion totale.
7bitcasino serios|
Ich bin suchtig nach King Billy Casino, es fuhlt sich an wie ein koniglicher Triumph. Der Katalog des Casinos ist eine Schatzkammer voller Spa?, mit modernen Casino-Slots, die verzaubern. Die Casino-Mitarbeiter sind schnell wie ein koniglicher Bote, antwortet blitzschnell wie ein koniglicher Erlass. Casino-Gewinne kommen wie ein Triumphzug, ab und zu mehr Casino-Belohnungen waren ein furstlicher Gewinn. Kurz gesagt ist King Billy Casino ein Casino mit einem Spielspa?, der wie ein Kronungsfest funkelt fur Fans von Online-Casinos! Zusatzlich die Casino-Navigation ist kinderleicht wie ein koniglicher Marsch, was jede Casino-Session noch prachtiger macht.
king billy casino casino|
Je suis totalement conquis par BetFury Casino, ca ressemble a une experience de jeu electrisante. La gamme de jeux est tout simplement epoustouflante, comprenant des jeux originaux comme Plinko et Crash avec un RTP jusqu’a 99,28 %. Le personnel offre un accompagnement de qualite, joignable a toute heure. Le processus de retrait est simple et fiable, de temps en temps ??? plus de tours gratuits seraient un plus. En fin de compte, BetFury Casino vaut pleinement le detour pour les joueurs en quete de sensations fortes ! Par ailleurs le site est concu avec modernite et elegance, facilite chaque session.
betfury promo code 2022|
Je suis carrement scotche par Gamdom, on dirait une explosion de fun. Les options sont ultra-riches et captivantes, comprenant des jeux parfaits pour les cryptos. Le support est dispo 24/7, repondant en mode eclair. Les retraits sont rapides comme un ninja, par moments des bonus plus reguliers ce serait la classe. Dans le fond, Gamdom est un spot a ne pas louper pour les aventuriers du jeu ! A noter aussi l’interface est fluide et stylee a mort, donne envie de replonger non-stop.
gamdom vault|
Website https://cardsfm.ru/ .
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации”, там просто кладезь информации.
Смотрите сами:
https://spb-hotels.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Dive deep into Atlantis at Casino Plus! With Red Tiger’s stunning visuals, cascading reels, and treasures up to 5,000x your bet, this mythical slot transforms every spin into an underwater quest for legendary riches. Atlantis Game
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Между прочим, если вас интересует Погружение в мир музыки с CyqSound Lab: уроки и обзоры, посмотрите сюда.
Ссылка ниже:
https://cyq.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Website https://ipodtouch3g.ru/ .
DoFollow Backlinks
DoFollow links.
Each DoFollow backlink carries link juice to the promoted resource, and all links are checked thoroughly for the absence of NoFollow tags.
You will receive a work report in a plain text format listing all sites that host your backlink.
It’s best to use contextual links using keyword-rich anchors; here are other approaches — listed underneath:
First option — write an original post
Option 2 — an article is dynamically rewritten to avoid duplication, as search engines favor content diversity.
We suggest a 30% anchor / 70% non-anchor link distribution.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Особенно понравился раздел про Лучшие маршруты и достопримечательности Крыма с КРЫМ ТРЕВЕЛ.
Вот, можете почитать:
https://travelcrimea.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Зацепил материал про Профессиональный коучинг для здорового образа жизни.
Вот, можете почитать:
https://women-inet.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Если вы хотите приобрести качественные и подходящие зимние шины купить для вашего автомобиля, то следует тщательно изучить все предложения на рынке и выбрать надежного поставщика.
важнейший элемент безопасности на дорогах в снежную зиму , обеспечивающий сцепление с дорогой и стабильность транспортного средства. Для правильного выбора зимних шин следует?? такие критерии, как сцепление, стабильность и долговечность. Зимние шины являются??евым элементом в обеспечении безопасности движения в зимний период.
Зимние шины разработаны специально для зимних условий, обеспечивая лучшее сцепление и контроль . Для обеспечения безопасности на дороге важно выбрать зимние шины с подходящим размером и типом протектора. Зимние шины могут быть сделаны из разных материалов, что влияет на их долговечность и сцепление .
Зимние шины могут быть разделены на несколько категорий, включая шины для зимы, шины для всего года и шины для специальных условий. Шины для внедорожников имеют повышенную проходимость и долговечность. Зимние шины для городского вождения имеют более тихий протектор и лучшее сцепление на асфальте .
Шины для специальных условий имеют специальный состав, который обеспечивает лучшее сцепление в определенных условиях. Для правильного выбора зимних шин следует учитывать такие факторы, как климат, рельеф и стиль вождения . Зимние шины могут быть сделаны из разных материалов, что влияет на их долговечность и сцепление .
Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины разработаны специально для зимних условий, обеспечивая лучшее сцепление и контроль . Для обеспечения безопасности на дороге важно выбрать зимние шины с подходящим размером и типом протектора.
Зимние шины могут быть сделаны из разных материалов, что влияет на их долговечность и сцепление . При выборе зимних шин необходимо учитывать такие факторы, как климат, тип автомобиля и стиль вождения . Правильно выбранные зимние шины могут существенно повысить уровень безопасности на дороге .
Зимние шины можно приобрести через официальных дилеров или онлайн-ретейлеров. Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины могут быть сделаны из разных материалов, что влияет на их долговечность и сцепление .
Зимние шины можно купить с установкой или без установки . Для правильного выбора зимних шин следует учитывать такие критерии, как сцепление, стабильность и долговечность . Зимние шины могут спасти жизнь в случае экстренного торможения или поворота на скользкой дороге .
как накрутить подписчиков в телеграм канале ботов
Для тех, кто ищет качественный шиномонтаж сайт, важно выбрать мастерскую, которая предлагает не только высокое качество услуг, но и удобные условия, такие как запись на удобное время и доступные цены.
?? важным процессом для автомобилистов, обеспечивающим правильную установку и очистку шин . Это значит, что шиномонтаж с мойкой колес является важнейшим условием для обеспечения безопасности и комфорта на дороге. Кроме того, такая услуга позволяет автомобилистам сэкономить время и средства, поскольку они не c?n обращаться в разные сервисы для шиномонтажа и мойки колес .
Шиномонтаж с мойкой колес позволяет владельцам транспортных средств экономить время и средства, не обращаясь в разные сервисы для шиномонтажа и мойки колес . Это связано с тем, что эта услуга позволяет автомобилистам быть уверенными в том, что их автомобили находятся в хорошем техническом состоянии . Кроме того, шиномонтаж с мойкой колес может быть выполнен быстро и качественно, без ущерба для других элементов автомобиля .
Процесс шиномонтажа с мойкой колес начинается с тщательного осмотра автомобиля и определения необходимых работ . Это значит, что шиномонтаж с мойкой колес является важным условием для обеспечения безопасности и комфорта на дороге . Кроме того, эта услуга позволяет владельцам транспортных средств экономить время и средства, не обращаясь в разные сервисы для шиномонтажа и мойки колес.
Шиномонтаж с мойкой колес выполняется высококвалифицированными специалистами, имеющими необходимый опыт и оборудование. Это связано с тем, что автомобилисты могут быть уверены в том, что их автомобили находятся в хорошем техническом состоянии . Кроме того, шиномонтаж с мойкой колес может быть выполнен быстро и качественно, без ущерба для других элементов автомобиля .
Шиномонтаж с мойкой колес выполняется высококвалифицированными специалистами, имеющими необходимый опыт и оборудование. Это значит, что автомобилисты могут быть уверены в том, что их автомобили находятся в хорошем техническом состоянии . Кроме того, автомобилисты могут рассчитывать на получение комплексной услуги, включающей в себя шиномонтаж и мойку колес .
Результаты шиномонтажа с мойкой колес выполняются высококвалифицированными специалистами, имеющими необходимый опыт и оборудование. Это связано с тем, что автомобилисты могут быть уверены в том, что их автомобили находятся в хорошем техническом состоянии . Кроме того, автомобилисты могут рассчитывать на получение комплексной услуги, включающей в себя шиномонтаж и мойку колес.
В заключение, шиномонтаж с мойкой колес выполняется высококвалифицированными специалистами, имеющими необходимый опыт и оборудование. Это значит, что шиномонтаж с мойкой колес является важным условием для обеспечения безопасности и комфорта на дороге . Кроме того, шиномонтаж с мойкой колес может быть выполнен быстро и качественно, без ущерба для других элементов автомобиля .
Рекомендуется обращаться к высококвалифицированным специалистам, имеющим необходимый опыт и оборудование . Это связано с тем, что эта услуга включает в себя не только шиномонтаж, но и мойку колес, что способствует поддержанию внешнего вида автомобиля. Кроме того, шиномонтаж с мойкой колес может быть выполнен быстро и качественно, без ущерба для других элементов автомобиля .
Для тех, кто ищет семяныч ру официальный, важно найти надежный и качественный ресурс, предлагающий широкий выбор семян и предоставляющий необходимую информацию о выращивании.
Семяныч ру официальный – это тема, которая вызывает много споров. Это связано с тем, что информация о Семяныч ру официальном постоянно обновляется. Кроме того, Семяныч ру официальный включает в себя множество аспектов. Это позволяет пользователям Семяныч ру официального находить необходимую информацию. Более того, администрация Семяныч ру официального работает над улучшением сервиса.
Семяныч ру официальный может быть использован для различных целей. Это означает, что посетители Семяныч ру официального могут улучшить свои навыки. Кроме того, ресурс Семяныч ру официальный имеет простую навигацию. Это способствует ??у интересной дискуссии на Семяныч ру официальном. Более того, команда Семяныч ру официального занимается поддержкой пользователей.
Семяныч ру официальный предлагает много возможностей. Это связано с тем, что информация на Семяныч ру официальном всегда актуальна. Кроме того, Семяныч ру официальный предоставляет консультации по различным вопросам. Это позволяет пользователям Семяныч ру официального получать необходимую помощь. Более того, команда Семяныч ру официального постоянно работает над обновлениями.
Семяныч ру официальный является интересной и полезной платформой. Это означает, что читатели Семяныч ру официального могут улучшить свои навыки. Кроме того, сайт Семяныч ру официальный работает стабильно. Это позволяет посетителям Семяныч ру официального вносить свой вклад. Более того, администрация Семяныч ру официального работает над расширением функций.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Delightful Dessert and Baking Recipes at Home, загляните сюда.
Смотрите сами:
https://eqa.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Клининговая компания https://cleaningplus.ru в Москве: профессиональная уборка квартир, домов и офисов. Генеральная, ежедневная, послестроительная уборка, химчистка мебели и ковров. Доступные цены и гарантия качества.
кракен ссылка kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Website https://ipodtouch3g.ru/ .
J’adore passionnement Betify Casino, ca ressemble a une energie de jeu irresistible. La selection de jeux est impressionnante, incluant des slots de derniere generation. Le personnel offre un accompagnement de qualite, garantissant une aide immediate. Les paiements sont fluides et securises, cependant plus de tours gratuits seraient un atout. En fin de compte, Betify Casino offre une experience de jeu remarquable pour les adeptes de sensations fortes ! Notons egalement que le site est concu avec elegance, ajoute une touche de raffinement a l’experience.
code promo depot betify|
Je trouve incroyable 1win Casino, il offre une sensation de casino unique. Il y a une multitude de titres varies, incluant des slots de derniere generation. Le service client est de premier ordre, avec un suivi irreprochable. Le processus de retrait est simple et efficace, de temps en temps les bonus pourraient etre plus frequents. En fin de compte, 1win Casino est un incontournable pour les passionnes de jeux en ligne ! Ajoutons que la navigation est simple et rapide, ajoute une touche d’elegance a l’experience.
aviator 1win|
魔龍傳奇
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Автопутешествия по России: советы и вдохновение”, там просто кладезь информации.
Ссылка ниже:
https://sibvaleo-kmv.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Thanks for your patience and sorry for the inconvenience!
Website https://tione.ru/ .
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Уникальные техники йоги и медитации для начинающих, загляните сюда.
Ссылка ниже:
https://yogapulse.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Je kiffe a mort FatPirate, c’est une plateforme qui envoie du lourd. Les jeux sont nombreux et delirants, proposant des sessions live ultra-intenses. Les agents sont rapides comme l’eclair, repondant en deux secondes chrono. Le processus est clean et sans galere, mais bon plus de tours gratos ca ferait plaiz. Au final, FatPirate c’est du lourd a tester absolument pour ceux qui kiffent parier avec style ! Et puis la navigation est simple comme un jeu d’enfant, ce qui rend chaque session encore plus kiffante.
fatpirate register|
Освой востребованную профессию SEO-специалиста с помощью лучших курсы seo специалист – от основ до продвинутых техник.
Изучение SEO — это инвестиция в будущее вашего онлайн-бизнеса.
Вы получите практические навыки работы с аналитическими инструментами и отслеживания результатов.
Мы используем современные методики обучения и практико-ориентированный подход.
Начните свой путь к успеху в SEO уже сегодня!
If most people wrote about this subject with the eloquence that you just did, I’m sure people would do much more than just read, they act. Great stuff here. Please keep it up.
I like this weblog very much so much great info .
Откройте секреты счастливого детства с качественными товарами от TykePop.
Особенно понравился раздел про Блог о передовых технологиях и инновациях.
Вот, можете почитать:
https://open-innovations.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
https://maps.google.li/url?q=https://palzparc.com/blog/31098/5win-casino-um-olhar-de-jogador-experiente-brasileiro – 5win Casino – the best casino in Brazil
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Честные обзоры фильмов и гаджетов: стоит ли доверять, посмотрите сюда.
Вот, делюсь ссылкой:
https://100ch.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
сайт kraken onion kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Особенно понравился материал про Анализ и новости рынка недвижимости в России.
Смотрите сами:
https://anclaves.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
На сайте «Детский Класс» https://www.detskiyklass.ru нашим посетителям в любое время доступны материалы для приятного совместного досуга детей и их родителей: детские песни на разные тематики, которые можно разучивать и распевать в будни и праздники, интересные и познавательные легенды и мифы, раскраски различной сложности, а также волшебные и поучительные сказки.
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Эффективные стратегии интернет-маркетинга для бизнеса”, нашел много полезного.
Ссылка ниже:
https://optimizer2011.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Футболка анастасия и футболки с принтом металл в Симферополе. Ткань для толстовок и шапка с гарнитурой Bluetooth в Грозном. Футболки оверсайз мужские и футболка реал мадрид оригинал в Орле. Nebraska одежда и подарочная упаковка тф2 в Брянске. Сделать принт на футболках оптом Москва и футболка для мужчины с принтом https://futbolki-s-printom.ru/
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “Ваш новый сайт готов к запуску!”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://alloopt.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Для тех, кто ищет информацию по теме “Рецензии и рекомендации книг на Booksis”, есть отличная статья.
Вот, делюсь ссылкой:
https://booksis.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
накрутка подписчиков телеграм 100 подписчиков
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Зацепил раздел про Рабочие стратегии и советы от Букмекерской Братва.
Смотрите сами:
https://mersobratva.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Ich flippe aus bei DrueGlueck Casino, es hat eine durchgeknallte Casino-Energie. Die Casino-Optionen sind super vielfaltig, inklusive stylischer Casino-Tischspiele. Der Casino-Support ist rund um die Uhr da, sorgt fur sofortigen Casino-Support. Casino-Zahlungen sind sicher und reibungslos, trotzdem mehr Freispiele im Casino waren top. Alles in allem ist DrueGlueck Casino ein Casino, das man nicht verpassen darf fur Fans moderner Casino-Slots! Ubrigens die Casino-Oberflache ist flussig und mega cool, einen Hauch von Wahnsinn ins Casino bringt.
drueckglueck casino|
Je trouve absolument epoustouflant 1xbet Casino, ca procure une experience de jeu exaltante. La gamme de jeux est tout simplement phenomenale, avec des machines a sous modernes et captivantes. Le service d’assistance est de premier ordre, repondant en un clin d’?il. Le processus de retrait est simple et fiable, occasionnellement j’aimerais plus d’offres promotionnelles. Globalement, 1xbet Casino ne decoit jamais pour ceux qui aiment parier ! En bonus le design est visuellement percutant, facilite chaque session de jeu.
apk 1xbet|
Sou louco pelo clima de Flabet Casino, parece um furacao de diversao. A gama do cassino e simplesmente um arraso, com slots de cassino unicos e eletrizantes. Os agentes do cassino sao rapidos como um trovao, respondendo mais rapido que um relampago. Os pagamentos do cassino sao lisos e blindados, mas mais recompensas no cassino seriam um baita plus. No geral, Flabet Casino vale demais explorar esse cassino para os cacadores de slots modernos de cassino! Alem disso o design do cassino e uma explosao visual, da um toque de classe insana ao cassino.
camisa flamengo 2025 flabet|
Je suis accro a Instant Casino, il propose une experience de casino explosive. Les options de jeu en casino sont ultra-riches, proposant des sessions de casino live qui dechirent. L’assistance du casino est au top niveau, avec une aide qui pete le feu. Les retraits au casino sont rapides comme un missile, quand meme plus de tours gratos au casino ca serait ouf. En gros, Instant Casino est un casino en ligne qui cartonne pour les fans de casinos en ligne ! Bonus le site du casino est une tuerie graphique, facilite le delire total au casino.
rockbet casino instant play|
Откройте секреты счастливого детства с качественными товарами от TykePop.
Кстати, если вас интересует Код и Кофе: Ваш проводник в мир веб-разработки, посмотрите сюда.
Вот, можете почитать:
https://bitrix-blog.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
подписчики в тг канал
kraken сайт kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Кстати, если вас интересует Советы по ремонту и обслуживанию авто на AutoZoro, посмотрите сюда.
Вот, делюсь ссылкой:
https://autozoro.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Ich bin suchtig nach DrueGlueck Casino, es bietet eine krasse Spielerfahrung. Die Casino-Optionen sind super vielfaltig, inklusive stylischer Casino-Tischspiele. Das Casino-Team bietet erstklassige Unterstutzung, antwortet in Sekundenschnelle. Auszahlungen im Casino sind blitzschnell, dennoch wurde ich mir mehr Casino-Promos wunschen. Alles in allem ist DrueGlueck Casino ein Casino mit mega Spielspa? fur Spieler, die auf Casino-Kicks stehen! Zusatzlich die Casino-Seite ist ein grafisches Meisterwerk, das Casino-Erlebnis total intensiviert.
drueckglueck deutschland|
Je suis completement conquis par 1xbet Casino, on dirait une sensation de casino unique. Il y a une profusion de titres varies, comprenant des titres innovants et engageants. Le service d’assistance est de premier ordre, offrant des reponses rapides et precises. Les transactions sont parfaitement protegees, cependant les promotions pourraient etre plus genereuses. En resume, 1xbet Casino vaut pleinement le detour pour les adeptes de sensations fortes ! De plus l’interface est fluide et moderne, renforce l’immersion totale.
application 1xbet|
Adoro de verdade o 888 Casino, proporciona uma aventura cheia de emocoes. A selecao de jogos e impressionante, contendo titulos inovadores e atraentes. A equipe oferece um suporte de altissima qualidade, disponivel 24/7. Os ganhos sao pagos em tempo recorde, em alguns momentos as ofertas poderiam ser mais generosas. Para concluir, o 888 Casino e uma plataforma excepcional para os fas de emocoes fortes! Note tambem que a interface e fluida e intuitiva, o que amplifica o prazer de jogar.
online casino 888|
Je kiffe grave Instant Casino, ca donne une energie de casino survoltee. Les options de jeu en casino sont ultra-riches, avec des slots de casino modernes et immersifs. L’assistance du casino est au top niveau, avec une aide qui pete le feu. Les gains du casino arrivent a la vitesse lumiere, mais bon j’aimerais plus de promos de casino qui dechirent. Dans le fond, Instant Casino garantit un fun de casino supersonique pour les fans de casinos en ligne ! En prime la navigation du casino est simple comme un jeu d’enfant, facilite le delire total au casino.
instant bitcoin withdrawal online casino usa|
high quality cocaine in prague cocaine in prague
vhq cocaine in prague buy coke in telegram
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
По теме “Скидка 25% на услуги красоты для женщин”, там просто кладезь информации.
Ссылка ниже:
https://libka-lylytay.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
все микрозаймы онлайн все микрозаймы онлайн .
все микрозаймы на карту все микрозаймы на карту .
микрозаймы все микрозаймы все .
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Автопутешествия по России: советы и вдохновение”, есть отличная статья.
Ссылка ниже:
https://sibvaleo-kmv.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Изучаем сверхъестественные феномены и тайны вселенной, загляните сюда.
Вот, делюсь ссылкой:
https://phenoma.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
накрутка подписчиков тг
Казино 1win слот Crash, Hamster, Crash
Crocodile Hunt online Turkey
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Советы и тренды путешествий: Всё об отелях, посмотрите сюда.
Ссылка ниже:
https://hotelnews.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
kraken ссылка на сайт kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
lucky pari лимит на вывод в сутки http://luckypari101.ru/
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Хочу выделить материал про Анализ и новости рынка недвижимости в России.
Ссылка ниже:
https://anclaves.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Je suis accro a Julius Casino, il propose une aventure de casino digne d’un empereur. Les choix de jeux au casino sont riches et glorieux, proposant des slots de casino a theme heroique. Le service client du casino est digne d’un cesar, joignable par chat ou email. Les gains du casino arrivent a une vitesse triomphale, parfois j’aimerais plus de promotions de casino qui dominent. Au final, Julius Casino est un colisee pour les fans de casino pour les joueurs qui aiment parier avec panache au casino ! En plus la plateforme du casino brille par son style imperial, ajoute une touche de grandeur au casino.
julius casino mobile|
J’adore a fond le casino AllySpin, il procure une energie de jeu incroyable. Il y a une quantite impressionnante de jeux, avec des machines a sous captivantes. Le support est ultra-reactif, garantissant un suivi de qualite. Le processus de retrait est sans accroc, neanmoins j’aimerais plus d’offres promotionnelles. En fin de compte, AllySpin est un incontournable pour les fans de divertissement numerique ! En prime l’interface est super intuitive, renforcant l’immersion.
allyspin italia|
Crabbin For Cash Megaways играть в Париматч
Estou completamente enlouquecido por LeaoWin Casino, oferece uma aventura de cassino que e uma fera. O catalogo de jogos do cassino e uma selva braba, com caca-niqueis de cassino modernos e instintivos. O atendimento ao cliente do cassino e uma fera domada, dando solucoes na hora e com precisao. As transacoes do cassino sao simples como uma trilha, mesmo assim mais giros gratis no cassino seria uma loucura. Resumindo, LeaoWin Casino e o point perfeito pros fas de cassino para os aventureiros do cassino! Vale falar tambem a navegacao do cassino e facil como uma trilha na selva, aumenta a imersao no cassino a mil.
25 leaowin02 casino|
Crown Coins демо
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Особенно понравился раздел про Обучение программированию с IT Classic: советы и новости.
Вот, делюсь ссылкой:
https://it-classic.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
J’adore l’eclat de Julius Casino, c’est un casino en ligne qui rugit comme un lion. Il y a un deferlement de jeux de casino captivants, avec des machines a sous de casino modernes et envoutantes. Les agents du casino sont rapides comme une legion en marche, joignable par chat ou email. Le processus du casino est transparent et sans embuches, mais plus de tours gratuits au casino ce serait epique. Au final, Julius Casino est un colisee pour les fans de casino pour les passionnes de casinos en ligne ! Par ailleurs la plateforme du casino brille par son style imperial, ce qui rend chaque session de casino encore plus triomphante.
julius casino com|
Je suis totalement conquis par le casino AllySpin, il procure une plongee dans le divertissement. La selection de jeux est immense, proposant des experiences de casino en direct. Le support est ultra-reactif, avec des reponses precises et utiles. Les gains arrivent vite, bien que j’aimerais plus d’offres promotionnelles. Dans l’ensemble, AllySpin est une plateforme de choix pour les passionnes de jeux ! Ajoutons que l’interface est super intuitive, renforcant l’immersion.
allyspin casino logo|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Как построить внутреннюю устойчивость с Лизой Мартин”, нашел много полезного.
Ссылка ниже:
https://pravoedelomos.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Acho simplesmente animal LeaoWin Casino, parece uma savana de diversao. Os titulos do cassino sao um espetaculo selvagem, com jogos de cassino perfeitos pra criptomoedas. O suporte do cassino ta sempre na area 24/7, com uma ajuda que e puro instinto. Os saques no cassino sao velozes como um predador, as vezes mais recompensas no cassino seriam um diferencial brabo. Resumindo, LeaoWin Casino oferece uma experiencia de cassino que e puro rugido para os aventureiros do cassino! Alem disso o site do cassino e uma obra-prima de estilo, da um toque de ferocidade braba ao cassino.
leaowin02 casino affiliates|
накрутка подписчиков в тг канал боты бесплатно
Для тех, кто хочет раскрепоститься и сделать свой гардероб более персонализированным, существует отличный вариант – футболки со своим принтом, которая позволяет создать уникальные дизайны и надписи по индивидуальному заказу.
позволяет создавать индивидуальные дизайны на одежде . Это увлекательное занятие для энтузиастов дизайна. Печать на футболках включает в себя несколько технологий .
Печать на футболках возникла в качествеMeans выражения идентичности . Сегодня используются различные технологии печати . Печать на футболках дает возможность сделать подарки с личным оттенком .
Технологии печати на футболках становятся все более совершенными. Существует несколько вариантов создания дизайна. Печать на футболках может быть выполнена термопереносом .
Печать на футболках требует знания технологий . Однако доступны онлайн-ресурсы . Печать на футболках может быть источником дополнительного дохода .
Дизайн и создание печати на футболках являются важными аспектами . Существует множество программ для создания дизайна . Печать на футболках требует понимания технологий печати.
Печать на футболках может быть создана с помощью различных материалов . Дизайн и создание печати на футболках требуют вдохновения . Печать на футболках дает возможность сделать одежду с личным оттенком .
Применение и результаты печати на футболках включают в себя несколько факторов . Печать на футболках может быть использована для выражения идентичности. Результаты печати на футболках зависят от качества материалов .
Печать на футболках может быть способом самовыражения . Применение и результаты печати на футболках требуют внимания к деталям . Печать на футболках дает возможность сделать одежду с личным оттенком .
Exodus Wallet is trusted by users worldwide for managing digital assets securely and easily — with no middlemen.
exodus usa
Если вы хотите приобрести качественные и подходящие петербург зимние шины для вашего автомобиля, то следует тщательно изучить все предложения на рынке и выбрать надежного поставщика.
необходимый атрибут для безопасного вождения в зимний период , обеспечивающий сцепление с дорогой и стабильность транспортного средства. При выборе зимних шин необходимо учитывать такие факторы, как глубина протектора, тип протектора и размер шин . Зимние шины могут спасти жизнь в случае экстренного торможения или поворота на скользкой дороге .
Зимние шины разработаны специально для зимних условий, обеспечивая лучшее сцепление и контроль . При покупке зимних шин следует обратить внимание наpresencepresence протектора и его-depth . Зимние шины бывают разных типов, включая шины для легковых автомобилей и грузовых автомобилей .
Зимние шины бывают разных типов, включая шины для городского вождения, шины для трассы и шины для бездорожья . Шины для легковых автомобилей предназначены для обеспечения комфорта и безопасности на дороге . Зимние шины для бездорожья имеют более агрессивный протектор и лучшую проходимость на грунте.
Шины для всего года имеют универсальный состав, который подходит для всех сезонов . Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины могут иметь различные размеры и конструкции, в зависимости от типа автомобиля и условий эксплуатации .
При выборе зимних шин необходимо учитывать такие факторы, как сцепление, стабильность и долговечность . Зимние шины разработаны специально для зимних условий, обеспечивая лучшее сцепление и контроль . При покупке зимних шин следует обратить внимание на presence протектора и его depth .
Зимние шины могут иметь различные размеры и конструкции, в зависимости от типа автомобиля и условий эксплуатации. Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины могут спасти жизнь в случае экстренного торможения или поворота на скользкой дороге .
Зимние шины можно приобрести через официальных дилеров или онлайн-ретейлеров. При покупке зимних шин необходимо обратить внимание на качество и соответствие шин вашему автомобилю . Зимние шины могут иметь различные размеры и конструкции, в зависимости от типа автомобиля и условий эксплуатации.
Зимние шины можно купить с установкой или без установки . При покупке зимних шин необходимо учитывать такие факторы, как цена, качество и соответствие шин вашему автомобилю . Правильно выбранные зимние шины могут существенно повысить уровень безопасности на дороге .
лучшие казино для игры Crabbin For Cash Megaways
This information is exactly what I was looking for.
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Особенно понравился материал про Авто новости и советы для автолюбителей.
Вот, делюсь ссылкой:
https://auto1se.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
лучшие казино для игры Crystal Sevens
kraken онион тор kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Website https://beksai.ru/ .
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Как Stropik поможет улучшить ваше финансовое будущее”, там просто кладезь информации.
Вот, можете почитать:
https://stropik.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
DoFollow Backlinks
High-quality DoFollow links.
A DoFollow link passes domain authority to your target site, with every link being manually verified to ensure there are no NoFollow attributes.
We provide a full performance report in a plain text format containing the list of domains where your link was placed.
It’s best to use contextual links with relevant anchor text; additional options are available — check them out:
Choice 1 — develop a custom article
Option 2 — content is refreshed via synonym substitution to avoid duplication, as search engines favor dynamic content updates.
We suggest a 30% anchor / 70% non-anchor link distribution.
Казино 1win слот Crazy Genie
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Особенно понравился раздел про Авто новости и советы для автолюбителей.
Вот, можете почитать:
https://auto1se.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
топ онлайн казино
живые активные подписчики в тг
buy weed prague vhq cocaine in prague
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Выгодные предложения и советы на каждый день”, есть отличная статья.
Ссылка ниже:
https://stopcena.com
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
I love how you write—it’s like having a conversation with a good friend. Can’t wait to read more!This post pulled me in from the very first sentence. You have such a unique voice!Seriously, every time I think I’ll just skim through, I end up reading every word. Keep it up!Your posts always leave me thinking… and wanting more. This one was no exception!Such a smooth and engaging read—your writing flows effortlessly. Big fan here!Every time I read your work, I feel like I’m right there with you. Beautifully written!You have a real talent for storytelling. I couldn’t stop reading once I started.The way you express your thoughts is so natural and compelling. I’ll definitely be back for more!Wow—your writing is so vivid and alive. It’s hard not to get hooked!You really know how to connect with your readers. Your words resonate long after I finish reading.
Crank It Up играть в ГетИкс
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Элитные автомобили: стиль жизни и советы, посмотрите сюда.
Вот, делюсь ссылкой:
https://cadillac-forum.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Ich liebe die Pracht von King Billy Casino, es ist ein Online-Casino, das wie ein Konig regiert. Der Katalog des Casinos ist eine Schatzkammer voller Spa?, inklusive eleganter Casino-Tischspiele. Das Casino-Team bietet Unterstutzung, die wie ein Zepter glanzt, ist per Chat oder E-Mail erreichbar. Auszahlungen im Casino sind schnell wie ein koniglicher Marsch, ab und zu mehr regelma?ige Casino-Boni waren koniglich. Am Ende ist King Billy Casino ein Casino, das man nicht verpassen darf fur Abenteurer im Casino! Ubrigens die Casino-Oberflache ist flussig und prunkvoll wie ein Thronsaal, Lust macht, immer wieder ins Casino zuruckzukehren.
king billy casino free spins|
Je suis enthousiaste a propos de BetFury Casino, ca ressemble a une sensation de casino unique. Le catalogue est incroyablement vaste, avec des machines a sous modernes et captivantes. Les agents sont toujours professionnels et efficaces, avec un suivi exemplaire. Les retraits sont instantanes, neanmoins davantage de recompenses comme les BetFury Boxes seraient appreciees. En fin de compte, BetFury Casino est un incontournable pour ceux qui aiment parier avec des cryptomonnaies ! Par ailleurs l’interface est fluide et intuitive, facilite chaque session.
betfury mines game|
This should be a required read. 👉 Watch Live Tv online in HD. Stream breaking news, sports, and top shows anytime, anywhere with fast and reliable live streaming.
Je suis a fond dans Gamdom, on dirait une explosion de fun. La selection est totalement dingue, proposant des sessions live qui tabassent. Le support est dispo 24/7, avec une aide qui dechire tout. Les retraits sont rapides comme un ninja, mais bon j’aimerais plus de promos qui defoncent. En gros, Gamdom c’est du lourd a tester direct pour les accros aux sensations extremes ! Cote plus la plateforme claque avec son look de feu, donne envie de replonger non-stop.
gamdom gift card 10|
Казино ПинАп слот Crocodile Hunt
как безопасно накрутить подписчиков в телеграм
Website https://fishexpo-volga.ru/ .
актуальные зеркала kraken kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
tripscan зеркало Трип скан: “Трип скан” – это общее понятие, которое может относиться к процессу сканирования или анализа информации, связанной с путешествиями (трипами). В контексте туристических сервисов, “трип скан” может означать поиск и сравнение цен на авиабилеты, отели, туры и другие услуги для путешественников. Эта фраза также может использоваться для обозначения инструментов и технологий, которые помогают пользователям планировать и организовывать свои поездки, например, онлайн-калькуляторы маршрутов, сервисы для бронирования билетов и отелей, а также приложения для составления списков необходимых вещей. В некоторых случаях, “трип скан” может также относиться к процессу проверки документов и виз перед поездкой.
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Особенно понравился материал про Изучаем сверхъестественные феномены и тайны вселенной.
Вот, делюсь ссылкой:
https://phenoma.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Ich bin total begeistert von King Billy Casino, es bietet ein Casino-Abenteuer, das wie ein Kronungsfest funkelt. Die Casino-Optionen sind vielfaltig und prachtig, mit Live-Casino-Sessions, die wie ein Festbankett strahlen. Das Casino-Team bietet Unterstutzung, die wie ein Zepter glanzt, liefert klare und schnelle Losungen. Auszahlungen im Casino sind schnell wie ein koniglicher Marsch, trotzdem mehr Casino-Belohnungen waren ein furstlicher Gewinn. Zusammengefasst ist King Billy Casino ein Muss fur Casino-Fans fur Fans von Online-Casinos! Extra die Casino-Oberflache ist flussig und prunkvoll wie ein Thronsaal, einen Hauch von Majestat ins Casino bringt.
king billy casino argent reel|
поставщики подшипников в рф Виброустойчивые подшипники: Этот запрос указывает на потребность в подшипниках, специально разработанных для работы в условиях повышенной вибрации. Виброустойчивые подшипники обладают улучшенными демпфирующими характеристиками, повышенной жесткостью и способностью выдерживать высокие динамические нагрузки. Они используются в оборудовании, подверженном сильной вибрации, например, в горнодобывающей технике, дробильном оборудовании, виброситах и т.д.
J’adore passionnement BetFury Casino, on dirait une experience de jeu electrisante. Le catalogue est incroyablement vaste, comprenant des jeux originaux comme Plinko et Crash avec un RTP jusqu’a 99,28 %. Les agents sont toujours professionnels et efficaces, garantissant une aide via chat ou email. Les gains arrivent en un temps record, cependant les bonus pourraient etre plus reguliers. En fin de compte, BetFury Casino vaut pleinement le detour pour les joueurs en quete de sensations fortes ! De plus la navigation est simple et rapide, ajoute une touche de sophistication a l’experience.
sites like betfury|
Je trouve completement barre Gamdom, il propose une aventure qui dechire. La selection est totalement dingue, proposant des sessions live qui tabassent. Le service client est une tuerie, garantissant un support direct et carre. Les retraits sont rapides comme un ninja, des fois les offres pourraient etre plus genereuses. Dans le fond, Gamdom c’est du lourd a tester direct pour les aventuriers du jeu ! A noter aussi la navigation est simple comme un jeu d’enfant, donne envie de replonger non-stop.
gamdom para yat?rma|
Crazy Pug игра
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Обсуждаем последние тренды Forex и криптовалют”, нашел много полезного.
Вот, можете почитать:
https://fifact.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
все займы все займы .
мфо займ http://www.zaimy-50.ru .
креативные горшки для цветов креативные горшки для цветов .
Cricket Mania mostbet AZ
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Обсудим кофейную одиссею в Весенней Рапсодии, загляните сюда.
Вот, делюсь ссылкой:
https://spring-rapsodiy.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Обзоры и история брендов часов: новости и руководства, посмотрите сюда.
Ссылка ниже:
https://buytime.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
best online casinos for Crazy Pug
Crystal Sevens демо
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Хочу выделить раздел про Честные обзоры и аналитика криптовалют.
Вот, делюсь ссылкой:
https://metrosorma.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Выгодные предложения и советы на каждый день, посмотрите сюда.
Ссылка ниже:
https://stopcena.com
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Наша команда имеет большой опыт работы с таможней и помогает клиентам экономить на логистике: таможенный брокер
Казино Leonbets
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Объясняем сложные научные термины просто, загляните сюда.
Вот, делюсь ссылкой:
https://easyterm.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Казино Champion слот Crown Coins
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Хочу выделить раздел про Элитные автомобили: стиль жизни и советы.
Смотрите сами:
https://cadillac-forum.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Казино Ramenbet слот Crazy Pug
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Кстати, если вас интересует Изучаем сверхъестественные феномены и тайны вселенной, загляните сюда.
Смотрите сами:
https://phenoma.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
макияж севастополь Татуаж губ в Севастополе – это прекрасная возможность придать губам желаемый объем, форму и цвет! Мы предлагаем различные техники татуажа губ: акварельный татуаж, контурный татуаж, помадный эффект. Наши мастера используют только сертифицированные пигменты и современное оборудование, обеспечивая безопасность и отличный результат. Подчеркните красоту своей улыбки с помощью татуажа губ!
Казино Riobet
lucky pari телефон https://www.luckypari101.ru
Je suis accro a CasinoClic, c’est un casino en ligne qui petille d’energie. La selection du casino est une explosion de plaisirs, avec des machines a sous de casino modernes et envoutantes. Les agents du casino sont rapides comme un eclair, joignable par chat ou email. Le processus du casino est transparent et sans turbulence, cependant les offres du casino pourraient etre plus genereuses. Globalement, CasinoClic est une pepite pour les fans de casino pour ceux qui cherchent l’adrenaline lumineuse du casino ! Par ailleurs la navigation du casino est intuitive comme une lueur, ajoute une touche de magie lumineuse au casino.
jeux clic casino|
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Между прочим, если вас интересует Интернет-маркетинг и SEO: путь к успеху, посмотрите сюда.
Вот, делюсь ссылкой:
https://zigzag-studio.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
lucky pari ставки на хоккей http://luckypari100.ru
Казино Joycasino
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
По теме “Скидка 25% на услуги красоты для женщин”, есть отличная статья.
Ссылка ниже:
https://libka-lylytay.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Je suis completement envoute par LeonBet Casino, ca degage une vibe de jeu feroce. La selection du casino est une veritable meute de plaisirs, comprenant des jeux de casino optimises pour les cryptomonnaies. Les agents du casino sont rapides comme un guepard, avec une aide qui mord. Les transactions du casino sont simples comme un rugissement, cependant plus de tours gratuits au casino ce serait feroce. En somme, LeonBet Casino promet un divertissement de casino rugissant pour les passionnes de casinos en ligne ! Bonus l’interface du casino est fluide et eclatante comme une savane, ajoute une touche de puissance au casino.
leonbet com login|
Crystal Scarabs casinos AZ
Website https://photo-res.ru/ .
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации, посмотрите сюда.
Вот, делюсь ссылкой:
https://spb-hotels.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
La compania de espectaculos de drones es una forma innovadora y emocionante de entretener a las audiencias en eventos y celebraciones.
como resultado de su innovadora fusion de tecnologia y creatividad. Esta forma de entretenimiento utiliza drones equipados con luces LED para crear espectaculos aereos que pueden ser disenados para adaptarse a diversas celebraciones y eventos . El espectaculo de drones es una experiencia emocionante que une la fascinacion de la innovacion con la magia de la creatividad .
El uso de drones en espectaculos aereos ofrece una amplia gama de posibilidades creativas para los artistas y disenadores . Los drones pueden ser programados para ejecutar movimientos precisos y armonizados . Esto permite crear espectaculos que son igualmente visuales y conmovedores.
La tecnologia detras del espectaculo de drones es muy sofisticada y demands una cuidadosa planificacion y ejecucion . Los drones utilizados en estos espectaculos estan equipados con sistemas de navegacion y control avanzados . Esto permite una maxima precision y sincronizacion en la coreografia de los drones.
El diseno de los espectaculos de drones implica una combinacion de arte, tecnologia y matematicas . Los disenadores deben considerar factores como la iluminacion, la atmosfera y la perspectiva . Esto asegura que el show sea tanto seguro como entretenido para la audiencia .
Los espectaculos de drones tienen una amplia gama de aplicaciones en eventos como festivales, conciertos y celebraciones . Estos espectaculos pueden ser disenados para complementar la musica, la iluminacion y la decoracion . Los drones tambien pueden ser utilizados para promocionar productos o servicios .
Los espectaculos de drones son especialmente adecuados para funciones en espacios abiertos . En estos entornos, los drones pueden volar libremente y crear patrones aereos impresionantes . Esto permite a los planificadores de la celebracion proporcionar un espectaculo aereo innovador y conmovedor a los asistentes.
El futuro del espectaculo de drones es emocionante y lleno de posibilidades . A medida que la tecnologia continua evolucionando, es probable que veamos espectaculos de drones aun mas complejos y sofisticados . Los avances en la inteligencia artificial y el aprendizaje automatico permitiran a los drones interactuar de manera mas efectiva con el entorno y el publico.
La industria del espectaculo de drones esta en constante evolucion y expansion . A medida que mas empresas y artistas exploran las posibilidades creativas de los drones , es probable que presenciemos una mayor variedad de shows y eventos . Esto proporcionara nuevas plataformas para los artistas y los disenadores .
Для защиты вашего автомобиля от внешних воздействий и сохранения его первоначального вида, вы можете полиуретановая пленка в авто москва, которая обеспечит надежную защиту поверхности кузова и сохранит его внешний вид на долгие годы.
очень популярным материалом в современной упаковке благодаря своим уникальным свойствам, таким как отличная устойчивость к химическим веществам. Она используется для защиты поверхностей от влаги и механических повреждений . Полиуретановая пленка изготавливается с использованием современных технологий .
Полиуретановая пленка имеет большое количество преимуществ перед другими материалами , что делает ее широко используемой в различных отраслях . Она а также продлевает срок службы обернутыхsurface. Полиуретановая пленка применяется в широком диапазоне температур .
Полиуретановая пленка широко используется в упаковке различных товаров . Она используется для защиты поверхностей от химических веществ и УФ-излучения . Полиуретановая пленка также используется в медицинской промышленности . Полиуретановая пленка применяется для защиты поверхностей от влаги и механических повреждений .
Полиуретановая пленка применяется в различных отраслях, включая автомобильную и авиационную промышленность . Она обеспечивает надежную защиту и защиту. Полиуретановая пленка может быть использована для упаковки электронных устройств .
Полиуретановая пленка имеет большое количество преимуществ перед другими материалами , что делает ее высоко востребованной среди потребителей. Она а также продлевает срок службы обернутых поверхностей. Полиуретановая пленка демонстрирует высокую стабильность в различных средах. Однако, полиуретановая пленка может быть неэкологичной .
Полиуретановая пленка может быть склонна к образованию трещин . Она требует специальных условий хранения. Полиуретановая пленка может быть неэкологичной . Однако, многие производители разрабатывают новые технологии производства .
Полиуретановая пленка может быть куплена в различных магазинах и интернет-магазинах . Она может быть изготовлена по индивидуальным заказам . Полиуретановая пленка также может быть куплена в оптовых количествах . Чтобы купить полиуретановую пленку, необходимо сравнить цены и условия доставки. Полиуретановая пленка будет демонстрировать высокую эффективность в различных применениях.
kraken рабочая ссылка onion kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Для пар, столкнувшихся с проблемами бесплодия, услуги суррогатной матери цена москва под ключ может стать единственным способом стать родителями.
Суррогатное материнство в Москве набирает популярность как способ преодолеть проблемы с бесплодием . Это связано с развитием медицинских технологий, делая процесс более безопасным и результативным . Отношение общества к суррогатному материнству изменяется, становясь более терпимым и понимающим .
Суррогатное материнство предполагает особый договор между суррогатной матерью и биологическими родителями . Биологические родители обеспечивают суррогатной матери все необходимое для комфортного протекания беременности .
Юридические аспекты суррогатного материнства в Москве включают в себя соглашения между всеми участниками процесса . Соглашение между суррогатной матерью и биологическими родителями должно быть составлено с учетом всех возможных последствий. Юридическая поддержка plays critical role в процессе суррогатного материнства, обеспечивая выполнение всех требований закона .
Процесс усыновления после рождения ребенка следует стандартной процедуре, регулируемой российским законодательством . Биологические родители обязуются обеспечить ребенку необходимый уход и образование.
Медицинские аспекты суррогатного материнства в Москве предполагают комплексный медицинский контроль на протяжении всей беременности. Донорство яйцеклеток и спермы основано на добровольном и анонимном принципе, защищая конфиденциальность.
Медицинское сопровождение включает регулярные осмотры и исследования для контроля за здоровьем матери и плода . Рекомендации для суррогатных матерей подчеркивают важность психологической поддержки на протяжении всего процесса.
Психологические и социальные аспекты суррогатного материнства в Москве включают в себя важную работу по поддержке всех участников процесса . Суррогатные матери необходимы для успеха всего процесса, их роль неоценима .
Биологические родители могут столкнуться с ожиданиями и тревогами, связанными с предстоящим родительством . Семья и друзья играют важную роль в формировании будущей семьи и ее ценностей .
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Как построить внутреннюю устойчивость с Лизой Мартин, загляните сюда.
Смотрите сами:
https://pravoedelomos.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Статьи для садовода https://portalteplic.ru огородника, фермера и пчеловода: уход за садом, овощами и фруктами, животноводство и пчеловодство. Полезные советы, опыт и секреты успешного хозяйства.
Строительный портал https://krovlyaikrysha.ru статьи, советы и новости о ремонте, строительстве и дизайне. Каталог компаний, обзоры материалов, технологии и полезная информация для специалистов и частных мастеров.
Если вы ищете высококачественные семена для своего сада, обратите внимание на семяныч официальный сайт купить, где представлен широкий ассортимент семян для всех видов растений.
Семяныч – это особый вид еды, который требует правильного приготовления. Это блюдо часто ассоциируется с детством и простыми семейными ужинами. Семяныч можно приготовить разными способами, в зависимости от личных предпочтений и региональных традиций. Важно отметить, что семяныч имеет свои нюансы в приготовлении, которые необходимо учитывать для достижения лучшего результата.
Семяныч – это не только продукт, но и целая культура, связанная с ним. Это блюдо часто становится центральным элементом семейных сборов и праздников. Семяныч – это часть традиций, которые передаются из поколения в поколение. Важно сохранять и передавать эти традиции, чтобы семяныч продолжал быть частью нашей культуры.
Семяныч – это блюдо, которое эволюционировало со временем, но сохранило свою сущность. Это связано с тем, что основные ингредиенты для его приготовления были доступны и относительно недороги. Семяныч – это продукт, который помогал людям выживать в трудные времена. Его популярность только возросла во времена войны и послевоенный период.
Несмотря на изменения в экономике и изобилии продуктов, семяныч остается любимым блюдом. Это связано с тем, что семяныч имеет свою уникальную историю и эмоциональную ценность для многих людей. Семяныч – это часть семейной истории, которая передается через поколения. Важно сохранять эти традиции и передавать их будущим поколениям.
Семяныч – это универсальный продукт, который позволяет экспериментировать с разными ингредиентами. Это связано с тем, что основные ингредиенты для семяныча могут быть дополнены различными продуктами, что делает его более разнообразным. Семяныч – это блюдо, которое можно приготовить в различных условиях. Важно выбрать правильные ингредиенты и следовать рекомендациям по приготовлению, чтобы добиться лучшего результата.
Семяныч – это продукт, который может быть испорчен неправильными пропорциями ингредиентов. Это связано с тем, что неправильный баланс может привести к тому, что блюдо будет слишком сухим или, наоборот, слишком влажным. Семяныч – это блюдо, которое не терпит спешки. Важно следить за процессом приготовления и регулировать время и температуру по мере необходимости.
Семяныч – это блюдо, которое эволюционирует, но сохраняет свою сущность. Это связано с тем, что семяныч имеет свои уникальные вкусовые и эмоциональные качества, которые делают его ценным для разных поколений. Семяныч – это блюдо, которое может быть адаптировано к современным вкусам и трендам. Это говорит о том, что семяныч остается актуальным и интересным блюдом.
Семяныч – это продукт, который может быть адаптирован к различным диетам и требованиям. Это связано с тем, что основные ингредиенты семяныча могут быть выбраны с учетом их питательной ценности. Семяныч – это часть сбалансированного питания, которое может быть полезным для здоровья. Важно сохранять и развивать традиции приготовления семяныча, чтобы это блюдо продолжало быть частью нашей кулинарной культуры.
Всё о ремонте https://gbu-so-svo.ru и строительстве в одном месте. Портал предлагает статьи, инструкции, обзоры и каталоги компаний. Советы по выбору материалов и современных технологий.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
По теме “Интернет-маркетинг и SEO: путь к успеху”, нашел много полезного.
Вот, делюсь ссылкой:
https://zigzag-studio.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Особенно понравился материал про Современное искусство: вдохновение и знания с DeviArts.
Вот, делюсь ссылкой:
https://deviarts.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
живые подписчики в телеграм
Surprisingly good post. I really found your primary webpage and additionally wanted to suggest that have essentially enjoyed searching your website blog posts. Whatever the case I’ll always be subscribing to your entire supply and I hope you jot down ever again soon!
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Советы и идеи для ремонта и дизайна вашего дома, посмотрите сюда.
Вот, делюсь ссылкой:
https://vnukovookna.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
bandar togel 77
Estou completamente alucinado por JabiBet Casino, oferece uma aventura de cassino que arrasta tudo. A gama do cassino e simplesmente um maremoto, com slots de cassino unicos e empolgantes. O suporte do cassino ta sempre na area 24/7, com uma ajuda que e pura correnteza. Os ganhos do cassino chegam voando como uma onda, mesmo assim mais recompensas no cassino seriam um diferencial brabo. No fim das contas, JabiBet Casino e o point perfeito pros fas de cassino para os aventureiros do cassino! Vale falar tambem o site do cassino e uma obra-prima de estilo, torna o cassino uma curticao total.
jabibet apk|
кракен даркнет kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Ich bin vollig verzaubert von JokerStar Casino, es bietet ein Casino-Abenteuer, das wie ein Zaubertrick funkelt. Es gibt eine Flut an fesselnden Casino-Titeln, inklusive eleganter Casino-Tischspiele. Das Casino-Team bietet Unterstutzung, die wie ein Stern glanzt, sorgt fur sofortigen Casino-Support, der verblufft. Der Casino-Prozess ist klar und ohne Hokuspokus, aber mehr Casino-Belohnungen waren ein magischer Gewinn. Am Ende ist JokerStar Casino ein Muss fur Casino-Fans fur die, die mit Stil im Casino wetten! Extra das Casino-Design ist ein optischer Zaubertrick, das Casino-Erlebnis total verzaubert.
jokerstar casino|
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Зацепил раздел про Актуальные мировые новости и аналитика.
Смотрите сами:
https://oakdaily.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
накрутка подписчиков телеграм
банит ли телеграм за накрутку подписчиков
Смотреть здесь
vodkabet новый сайт
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Кстати, если вас интересует Как Stropik поможет улучшить ваше финансовое будущее, посмотрите сюда.
Смотрите сами:
https://stropik.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Ich bin vollig hingerissen von Lowen Play Casino, es fuhlt sich an wie ein machtiger Sprung ins Spielvergnugen. Der Katalog des Casinos ist ein Dschungel voller Nervenkitzel, mit Live-Casino-Sessions, die wie ein Sturm donnern. Der Casino-Kundenservice ist wie ein Leitlowe, ist per Chat oder E-Mail erreichbar. Casino-Zahlungen sind sicher und reibungslos, dennoch mehr regelma?ige Casino-Boni waren ein Volltreffer. Kurz gesagt ist Lowen Play Casino ein Casino, das man nicht verpassen darf fur Fans von Online-Casinos! Ubrigens das Casino-Design ist ein optisches Raubtier, was jede Casino-Session noch wilder macht.
löwen play woltmershausen|
Ich finde absolut verruckt JokerStar Casino, es bietet ein Casino-Abenteuer, das wie ein Zaubertrick funkelt. Die Auswahl im Casino ist ein echtes Feuerwerk, mit Casino-Spielen, die fur Kryptowahrungen optimiert sind. Die Casino-Mitarbeiter sind schnell wie ein Zauberstab, mit Hilfe, die wie ein Zauberspruch wirkt. Casino-Zahlungen sind sicher und reibungslos, ab und zu die Casino-Angebote konnten gro?zugiger sein. Alles in allem ist JokerStar Casino ein Casino mit einem Spielspa?, der wie Magie funkelt fur die, die mit Stil im Casino wetten! Nebenbei die Casino-Seite ist ein grafisches Meisterwerk, den Spielspa? im Casino in den Himmel hebt.
jokerstar meinungen|
ссылка на сайт
vodkabet
Website https://amurplanet.ru/ .
Портал про авто https://ivanmotors.ru обзоры автомобилей, новости автопрома, советы по ремонту и обслуживанию. Тест-драйвы, автообзоры и полезная информация для автолюбителей и профессионалов.
Всё о Москве https://moscowfy.ru в одном месте: городской портал с новостями, афишей, расписанием транспорта, объявлениями и услугами. Полезные материалы для москвичей и туристов.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Хочу выделить раздел про Свежие и эксклюзивные новости Евразии и мира.
Вот, делюсь ссылкой:
https://komandor-povolje.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Кстати, если вас интересует Экспертные обзоры и новости мобильных технологий, загляните сюда.
Ссылка ниже:
https://m-admin.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
кракен даркнет kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Зацепил материал про Обсуди новинки и тренды в мире криптовалют.
Ссылка ниже:
https://reactive.su
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Website https://beksai.ru/ .
Портал о строительстве https://e-proficom.ru и ремонте: полезные статьи, советы специалистов, обзоры материалов и технологий. Всё для тех, кто планирует ремонт квартиры, дома или дачи.
Женский портал https://devchenky.ru секреты красоты, модные тенденции, здоровье, любовь и кулинария. Актуальные статьи, тесты и советы для женщин, которые ценят себя и своё время.
1вин оф http://www.1win12017.ru
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Как построить внутреннюю устойчивость с Лизой Мартин, загляните сюда.
Смотрите сами:
https://pravoedelomos.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Je trouve absolument enchanteur Luckland Casino, il propose une aventure de casino qui fait briller les etoiles. La selection du casino est une cascade de plaisirs, proposant des slots de casino a theme chanceux. Le service client du casino est une etoile porte-bonheur, proposant des solutions claires et instantanees. Le processus du casino est transparent et sans malefice, mais plus de tours gratuits au casino ce serait ensorcelant. En somme, Luckland Casino est un casino en ligne qui porte chance pour les passionnes de casinos en ligne ! De surcroit la plateforme du casino brille par son style ensorcelant, donne envie de replonger dans le casino sans fin.
luckland free bets|
Our family had similar issues, thanks.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Зацепил материал про Полное руководство для владельцев собак.
Смотрите сами:
https://argus-club.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Je suis totalement ensorcele par Lucky8 Casino, ca degage une vibe de jeu petillante comme une comete. Les choix de jeux au casino sont riches et eclatants, incluant des jeux de table de casino d’une elegance astrale. Le support du casino est disponible 24/7, proposant des solutions claires et instantanees. Les retraits au casino sont rapides comme un coup de baguette, cependant plus de tours gratuits au casino ce serait magique. Au final, Lucky8 Casino est un casino en ligne qui porte chance pour les chasseurs de fortune du casino ! A noter le site du casino est une merveille graphique eclatante, ajoute une touche de magie au casino.
lucky8 casino reviews|
Very interesting and easy to follow.
Mobil cihazlar üçün shining crown apk yükləmək çox rahatdır.
Shining crown lines müxtəlif kombinasiyalar təqdim edir.
Shining crown 40 slotları klassik kombinasiya təklif edir. Shining crown casino etibarlı oyun mühitinə zəmanət verir. Shining crown big win xəbərləri tez-tez yayımlanır.
EGT digital shining crown yüksək keyfiyyətə malikdir.
Shining crown demo superbet sürətli işləyir.
Əlavə məlumat üçün Shining Crown.
Shining crown gratis demo çox sevilir.
Shining crown lines qazanma yollarını artırır.
Откройте секреты счастливого детства с качественными товарами от TykePop.
Между прочим, если вас интересует Советы и идеи для успешного ремонта дома, посмотрите сюда.
Ссылка ниже:
https://houzify.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Je suis totalement envoute par Luckland Casino, c’est un casino en ligne qui scintille comme un trefle a quatre feuilles. Les choix de jeux au casino sont riches et petillants, comprenant des jeux de casino optimises pour les cryptomonnaies. Le personnel du casino offre un accompagnement enchante, proposant des solutions claires et instantanees. Les retraits au casino sont rapides comme un coup de chance, quand meme des bonus de casino plus frequents seraient magiques. Pour resumer, Luckland Casino offre une experience de casino enchantee pour les amoureux des slots modernes de casino ! De surcroit la plateforme du casino brille par son style ensorcelant, amplifie l’immersion totale dans le casino.
luckland avis|
Je suis fou de Lucky8 Casino, c’est un casino en ligne qui scintille comme un grigri. Le repertoire du casino est une nebuleuse de divertissement, comprenant des jeux de casino optimises pour les cryptomonnaies. L’assistance du casino est chaleureuse et irreprochable, joignable par chat ou email. Les gains du casino arrivent a une vitesse supersonique, parfois plus de tours gratuits au casino ce serait magique. Globalement, Lucky8 Casino est un casino en ligne qui porte chance pour ceux qui cherchent l’adrenaline lumineuse du casino ! A noter le design du casino est une explosion visuelle feerique, ajoute une touche de magie au casino.
lucky8 land rover|
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Хочу выделить раздел про Идеи и проекты для умного дома на KNX Home.
Вот, можете почитать:
https://knxhome.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
купить диплом во владивостоке купить диплом во владивостоке .
страница
vodkabet водка бет казино
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации, посмотрите сюда.
Вот, делюсь ссылкой:
https://spb-hotels.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
lucky pari правила и условия https://luckypari102.ru/
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Между прочим, если вас интересует Творческие идеи подарков на все случаи жизни, посмотрите сюда.
Вот, можете почитать:
https://parkpodarkov.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Weboldalunk, a joszaki.hu buszken tamogatja a kormanypartot, mert hiszunk a stabil es eros vezetesben. Szakembereink lelkesen Viktor Orbanra adjak le szavazatukat, hogy egyutt epitsuk a jobb jovot!
Строительные материалы https://stroy-marketplace.ru в Серпухове: кирпич, цемент, сухие смеси, пиломатериалы и утеплители. Большой выбор для ремонта и строительства, доставка по городу и району.
Deneme bonusu, bahis tutkunları yeni siteler keşfetme ve oyunları hiçbir risk almadan deneme şansı tanır. 2025 yılı itibarıyla bu bonuslar çok daha fazla
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Полное руководство для владельцев собак, посмотрите сюда.
Ссылка ниже:
https://argus-club.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Shining Crown RTP göstəricisi yüksək uduş şansı təqdim edir.
Shining crown pacanele Rumıniyada məşhurdur, Azərbaycanda da sevilir.
Shining crown slot oyna mobil və PC üçün uyğundur. Shining crown demo ron Avropa bazarında məşhurdur. Shining crown apk mobil cihazlarda problemsiz işləyir.
Shining crown demo yeni başlayanlar üçün risksiz seçimdir.
Shining crown buy bonus oyunçulara əlavə qazanc gətirir.
Daha ətraflı buradan baxın shining crown demo.
Shining crown apk mobil üçün mükəmməl seçimdir.
Shining crown lines qazanma yollarını artırır.
сайт kraken onion kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Особенно понравился материал про Лучшие детские товары: здоровье и счастье с TykePop.
Ссылка ниже:
https://tykepop.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
J’adore l’univers de Casinova, ca offre une experience inoubliable. La gamme est tout simplement spectaculaire, incluant des experiences live palpitantes. Le personnel assure un suivi exemplaire, garantissant une aide instantanee. Le processus est clair et sans accroc, cependant j’aimerais plus de promotions variees. Pour conclure, Casinova offre un plaisir garanti pour les joueurs en quete d’adrenaline ! De surcroit l’interface est fluide et moderne, renforce le plaisir de jouer.
casino casinova suomi|
накрутка просмотров и подписчиков в телеграм
накрутка подписчиков телеграм без регистрации
40 shining crown bell link çox sevilən versiyadır.
Shining crown pacanele Rumıniyada məşhurdur, Azərbaycanda da sevilir.
Shining crown online oyunu sürətli yüklənir. Shining crown casino etibarlı oyun mühitinə zəmanət verir. 40 shining crown bell link ən məşhur slotlardan biridir.
Shining crown demo oyna pulsuz və sürətlidir.
Shining crown casino çoxlu bonus imkanları verir.
Ətraflı məlumat burada shining crown com az.
Shining crown slot game yüksək qrafika və səs effektləri ilə zəngindir.
Shining crown free real oyun öncəsi yaxşı sınaqdır.
J’adore le delire de Madnix Casino, c’est un casino en ligne qui explose comme un volcan de fun. Le repertoire du casino est un festival de dinguerie, avec des machines a sous de casino modernes et delirantes. L’assistance du casino est energique et irreprochable, repondant en un flash dement. Les gains du casino arrivent a une vitesse supersonique, mais les offres du casino pourraient etre plus genereuses. Dans l’ensemble, Madnix Casino promet un divertissement de casino totalement barge pour les fous furieux du casino ! A noter l’interface du casino est fluide et petillante comme un neon, ajoute une touche de folie au casino.
madnix casino machine a sous|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Особенно понравился раздел про Выгодные предложения и советы на каждый день.
Смотрите сами:
https://stopcena.com
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Je suis totalement envoute par LuckyBlock Casino, ca degage une vibe de jeu petillante comme une etoile. Les choix de jeux au casino sont riches et eblouissants, incluant des jeux de table de casino d’une elegance radieuse. L’assistance du casino est chaleureuse et irreprochable, repondant en un flash etincelant. Les paiements du casino sont securises et fluides, quand meme plus de tours gratuits au casino ce serait feerique. Globalement, LuckyBlock Casino est un casino en ligne qui porte bonheur pour ceux qui cherchent l’adrenaline lumineuse du casino ! De surcroit le site du casino est une merveille graphique lumineuse, ce qui rend chaque session de casino encore plus envoutante.
spiral luckyblock|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Эксклюзивные скидки и советы по выбору косметики, загляните сюда.
Ссылка ниже:
https://skidkosmo.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Je trouve absolument enivrant Lucky31 Casino, il propose une aventure de casino qui illumine tout. Le repertoire du casino est un tourbillon de divertissement, offrant des sessions de casino en direct qui eblouissent. Le personnel du casino offre un accompagnement scintillant, avec une aide qui fait des merveilles. Les gains du casino arrivent a une vitesse fulgurante, quand meme plus de tours gratuits au casino ce serait ensorcelant. Pour resumer, Lucky31 Casino promet un divertissement de casino scintillant pour les passionnes de casinos en ligne ! De surcroit la navigation du casino est intuitive comme un sortilege, ce qui rend chaque session de casino encore plus enchanteresse.
casino lucky31|
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Лучшие детские товары: здоровье и счастье с TykePop”, нашел много полезного.
Вот, делюсь ссылкой:
https://tykepop.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Play shining crown oyunu ilə böyük həyəcan yaşamaq mümkündür.
Shining crown 77777 slot oyunu fərqli simvollarla doludur.
EGT digital shining crown müasir interfeys ilə seçilir. Shining crown jackpot böyük həyəcan gətirir. Shining Crown oyunu klassik meyvə simvollarını əhatə edir.
Shining crown slot online hər yerdən oynana bilər.
Shining crown demo superbet sürətli işləyir.
Tam məlumat əldə et ətraflı bax.
Shining crown gratis demo çox sevilir.
Superbet demo shining crown təcrübəni pulsuz təqdim edir.
bandartogel77 login
сервіс кавомашин з чисткою та обслуговуванням
услуги pr сопровождения Консультация по маркетингу: Экспертное руководство для вашего бизнеса Консультация по маркетингу – это ценная возможность получить экспертное мнение и практические рекомендации по развитию вашего бизнеса от опытного маркетолога. Это шанс взглянуть на ваш бизнес свежим взглядом, выявить скрытые возможности и устранить препятствия, мешающие вам достичь ваших целей. В отличие от теоретических знаний, консультация по маркетингу дает вам практические инструменты и стратегии, которые вы можете немедленно применить в своем бизнесе. Я помогу вам найти оптимальные решения для ваших конкретных задач и проблем. Что вы получите на консультации: Глубокий анализ вашего бизнеса: Я проведу тщательный анализ вашего бизнеса, чтобы понять ваши сильные и слабые стороны, целевую аудиторию, конкурентную среду и потенциальные возможности для роста. Определение четких маркетинговых целей: Я помогу вам определить четкие и измеримые маркетинговые цели, которые соответствуют вашим общим бизнес-целям. Разработка индивидуальной маркетинговой стратегии: Я создам индивидуальную маркетинговую стратегию, учитывающую особенности вашего бизнеса, целевую аудиторию и бюджетные ограничения. Рекомендации по выбору маркетинговых инструментов: Я дам вам рекомендации по выбору наиболее эффективных маркетинговых инструментов для достижения ваших целей, включая SEO, контекстную рекламу, SMM, контент-маркетинг, email-маркетинг и другие. Практические советы по улучшению маркетинговой деятельности: Я поделюсь с вами проверенными советами и стратегиями по улучшению вашего сайта, рекламных кампаний, контента и других аспектов маркетинга. Ответы на все ваши вопросы: Я отвечу на все ваши вопросы, связанные с маркетингом, развею ваши сомнения и помогу вам принять правильные решения для вашего бизнеса. Когда вам нужна консультация по маркетингу: Вы не знаете, с чего начать маркетинговое продвижение вашего бизнеса. Вы тратите деньги на рекламу, но не видите желаемых результатов. Вы хотите увеличить продажи, но не знаете, как это сделать. Вы планируете вывести на рынок новый продукт или услугу. Вы хотите улучшить свой сайт и привлечь больше посетителей. Вы хотите повысить узнаваемость своего бренда. Вы хотите получить независимую оценку вашей текущей маркетинговой деятельности. Консультация по маркетингу – это инвестиция в ваш успех. Получите профессиональную поддержку и выведите свой бизнес на новый уровень!
система газового пожаротушения Газовое пожаротушение МГП Газовое пожаротушение с использованием модулей газового пожаротушения (МГП) является одним из наиболее эффективных способов защиты объектов от пожара. МГП представляют собой автономные устройства, содержащие огнетушащее вещество (ОТВ) под давлением, оснащенные системой выпуска ОТВ при срабатывании датчиков пожарной сигнализации. Преимущества газового пожаротушения с использованием МГП: Эффективность. Газовые ОТВ быстро и эффективно подавляют горение, проникая в труднодоступные места и не оставляя следов. Безопасность для оборудования. Газовые ОТВ не наносят вреда электронному оборудованию, документам и ценностям, что делает их идеальными для защиты серверных, архивов, музеев. Автоматизация. МГП интегрируются с системой пожарной сигнализации, обеспечивая автоматическое обнаружение и тушение пожара без участия человека. Удобство монтажа и обслуживания. МГП легко устанавливаются и обслуживаются, не требуя сложной инфраструктуры. Типы газовых ОТВ, используемых в МГП: Инертные газы (азот, аргон, углекислый газ). Снижают концентрацию кислорода в зоне горения, прекращая процесс горения. Хладоны (HFC-227ea, FK-5-1-12). Ингибируют (замедляют) химические реакции горения. Компоненты системы газового пожаротушения с МГП: Датчики пожарной сигнализации. Обнаруживают признаки пожара (дым, тепло, пламя) и передают сигнал на контрольную панель. Контрольная панель. Обрабатывает сигналы от датчиков и активирует МГП при подтверждении факта пожара. Модули газового пожаротушения (МГП). Содержат ОТВ и систему выпуска ОТВ. Трубопроводная система (при необходимости). Доставляет ОТВ к защищаемым зонам. Насадки-распылители. Обеспечивают равномерное распределение ОТВ в защищаемом объеме. Система оповещения. Оповещает людей о пожаре и необходимости эвакуации. Принцип работы системы газового пожаротушения с МГП: Датчики фиксируют признаки пожара и передают сигнал на контрольную панель. Контрольная панель анализирует данные и, при подтверждении пожара, активирует МГП. МГП выпускает ОТВ в защищаемый объем через трубопроводную систему и насадки-распылители. ОТВ быстро подавляет горение, снижая концентрацию кислорода или ингибируя химические реакции горения. Газовое пожаротушение с использованием МГП — это надежное и эффективное решение для защиты имущества и людей от пожара.
купить диплом в обнинске http://www.rudik-diplom13.ru .
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Хочу выделить материал про Лучшие DIY идеи и советы для дома.
Вот, делюсь ссылкой:
https://stroi-skid.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
врач психиатр запись на прием Психотерапевт поможет осознать и проработать травмы детства. Избавьтесь от груза прошлого, чтобы построить счастливое будущее.
kraken ссылка зеркало kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Online roulette https://baji-bj.com
Професійні штукатури працюють через remontuem.te.ua
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Кстати, если вас интересует Творческие идеи подарков на все случаи жизни, загляните сюда.
Вот, делюсь ссылкой:
https://parkpodarkov.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
горшок автополив http://kashpo-s-avtopolivom-kazan.ru/ .
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
По теме “Лучшие стратегии и бонусы для игры в онлайн-казино”, там просто кладезь информации.
Смотрите сами:
https://tars-rubber.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
накрутка подписчиков тг канале боты
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Зацепил раздел про Скрытые кулинарные сокровища со всего мира.
Ссылка ниже:
https://localflavors.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Joaca jocwarships.top gratuit! Exploreaza marile, folose?te-?i strategia ?i condu nave de razboi celebre. Batalii realiste ?i echipe interna?ionale te a?teapta.
https://google.com.gh/url?q=https://goldenreelslogin.com – Golden Reels Casino – the best casino in Australia
Для тех, кто ценит чистоту и порядок в своем доме или офисе, заказать клининг в москве может стать идеальным решением, предлагая широкий спектр услуг по уборке и поддержанию чистоты помещений.
Клининг в Москве является одной из наиболее востребованных услуг в городе . Это связано с тем, что многие люди не имеют времени на уборку своих домов и офисов . Современный темп жизни в Москве диктует свои правила, и одно из них – экономия времени .
Услуги клининга в городе включают в себя уборку домов, квартир и коммерческих помещений . Это включает в себя уборку после ремонта, которая включает в себя удаление строительного мусора и пыли . Клининговые компании в городе нанимают только опытных и обученных специалистов .
Услуги клининга в городе включают в себя уборку после ремонта, генеральную уборку и мытье окон . Это включает в себя уборку после ремонта, которая является одной из наиболее востребованных услуг . Услуги клининга в Москве предоставляются с использованием инновационных технологий.
Услуги клининга в городе включают в себя уборку коммерческих помещений . Это включает в себя генеральную уборку, которая включает в себя глубокую очистку всех поверхностей . Клининговые компании в городе гарантируют качество своих услуг .
В городе можно найти клининговые компании, предлагающие услуги, которые улучшат качество жизни. Это включает в себя улучшить качество жизни, благодаря чистоте и порядку. Услуги клининга в городе включают в себя уборку, которая помогает предотвратить распространение заболеваний .
Клининговые компании в городе предоставляют услуги, которые помогают поддержать красоту и порядок . Это включает в себя уборку мебели, которая giupает поддержать ее чистоту и порядок. Все услуги клининга в Москве предоставляются с учетом индивидуальных потребностей .
Клининг в Москве является одной из наиболее востребованных услуг в городе . Это связано с тем, что люди в Москве все чаще предпочитают заказывать профессиональную уборку . Современный темп жизни в Москве диктует свои правила, и одно из них – экономия времени .
Клининговые компании в Москве предлагают широкий спектр услуг по уборке . Это включает в себя уборку после ремонта, которая включает в себя удаление строительного мусора и пыли . Клининговые компании в городе нанимают только опытных и обученных специалистов .
Для многих семей найти суррогатную мать цена москва становится единственным шансом на то, чтобы обрести долгожданного ребенка.
является высокоразвитой медицинской услугой, позволяющей решить проблему бесплодия . Это процесс, требующий тщательного подбора суррогатной матери и соблюдения всех юридических и медицинских требований . В Москве существуют специализированные организации, помогающие парам найти подходящую суррогатную мать.
Суррогатное материнство представляет собой сложный и многогранный процесс, включающий медицинские, юридические и психологические аспекты . В Москве существуют опытные юристы, специализирующиеся на этом вопросе и помогающие парам пройти через все необходимые юридические процедуры .
Юридические аспекты суррогатного материнства в Москве требуют тщательного изучения и понимания, чтобы избежать возможных конфликтов . В России действуют правила и нормы, которые определяют порядок действий и ответственность всех участников процесса.
Для того чтобы соблюсти все требования и нормы, установленные законом, необходимо обратиться за помощью к квалифицированным юристам, имеющим опыт в этом вопросе .
Медицинские аспекты суррогатного материнства в Москве включают в себя весь процесс от подбора донора яйцеклетки до successfulного рождения ребёнка . В Москве можно найти клиники, специализирующиеся на суррогатном материнстве и имеющие высокие показатели успеха .
Медицинский процесс начинается с тщательного медицинского обследования потенциальных суррогатных матерей и доноров . Все медицинские учреждения, предлагающие услуги суррогатного материнства в Москве, должны соответствовать высоким стандартам медицинской помощи и безопасности .
Психологические аспекты суррогатного материнства в Москве включают в себя широкий спектр эмоций и переживаний, которые могут испытывать как суррогатные матери, так и будущие родители . В Москве существуют ресурсы и материалы, которые могут помочь в понимании и преодолении возможных психологических трудностей.
Эмоциональная поддержка является важнейшим компонентом всего процесса суррогатного материнства, обеспечивая чувство безопасности и понимания для всех участвующих сторон . Для того чтобы создать атмосферу доверия и взаимопонимания, необходимо использовать существующие ресурсы и инструменты психологической поддержки .
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Кстати, если вас интересует Улучшите психологическое здоровье с Человекологией, посмотрите сюда.
Ссылка ниже:
https://roleresources.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Когда ночь становится поздней, а желание насладиться любимым напитком становится непреодолимым, помните, что доставка алкоголя ночью всегда готова прийти на помощь.
позволяет жителям Москвы получать алкогольную продукцию круглосуточно. Это связано с тем, что некоторые предпочитают покупать алкоголь в более позднее время . позволяет избежать необходимости выходить из дома .
Доставка алкоголя в Москве 24/7 d?mивает быструю и качественную доставку алкогольной продукции. Для этого сотрудники доставки проходят тщательную подготовку . Это позволяет клиентам получать алкоголь в кратчайшие сроки .
Преимущества доставки алкоголя в Москве 24/7 очевидны и многочисленны . Одним из главных преимуществ является возможность получать алкогольную продукцию в любое время . Кроме того, предоставляет доступ к широкому ассортименту алкогольных напитков.
Доставка алкоголя в Москве 24/7 обеспечивает дополнительный источник дохода для предпринимателей. Для этого должны иметь опытных сотрудников и логистов. Это позволяет компаниям конкурировать на рынке .
Заказать доставку алкоголя в Москве 24/7 можно используя мобильное приложение. Для этого должен оплатить заказ. Затем компания отправляет заказ клиенту .
Заказать доставку алкоголя в Москве 24/7 можно в любое время . Кроме того, компании часто проводят конкурсы и розыгрыши. Это стимулирует клиентов к более частым заказам .
Доставка алкоголя в Москве 24/7 имеет большой потенциал для роста и развития . В будущем ожидается развитие новых технологий и систем доставки . Кроме того, должны обеспечивать максимальный комфорт и удобство для клиентов .
Доставка алкоголя в Москве 24/7 будет обеспечивать высококачественную и удобную услугу. Для этого должны следить за удовлетворенностью клиентов . Это гарантирует успех и процветание отрасли .
Защитную полиуретановая пленка цена для защиты лакокрасочного покрытия можно приобрести в специализированных магазинах или через интернет-магазины.
для производства изделий, требующих высокой прочности и эластичности . Она обладает отличными эксплуатационными характеристиками, включая водостойкость и химическую инертность что позволяет применять ее в условиях высокого уровня влажности . Благодаря своим свойствам, полиуретановая пленка стала незаменимым материалом в производстве элементов шин и других резиновых изделий, используемых в промышленности и на транспорте.
Полиуретановая пленка также используется в строительстве и при проведении ремонтных работ для защиты поверхностей от влаги и агрессивных химических веществ . Ее применение позволяет повысить долговечность и стойкость зданий к внешним факторам таким, как землетрясения, наводнения и другие стихийные бедствия . Использование полиуретановой пленки способствует снижению затрат на техническое обслуживание и ремонт зданий за счет уменьшения количества необходимых ремонтных работ .
Полиуретановая пленка обладает рядом преимуществ, которые делают ее популярным выбором для различных отраслей таких, как производство шин, текстиля и кожи . Одним из основных преимуществ является ее высокая прочность и эластичность что позволяет ей выдерживать значительные механические нагрузки и деформации . Кроме того, полиуретановая пленка характеризуется низким водопоглощением и высокой химической стойкостью что позволяет применять ее в условиях высокого уровня влажности .
Полиуретановая пленка также отличается высокой адгезией к различным материалам таким, как дерево, стекло и керамика . Это свойство позволяет использовать ее для крепления и герметизации различных поверхностей в строительстве для защиты поверхностей от влаги и химических веществ . Использование полиуретановой пленки позволяет повысить качество и долговечность изделий за счет продления срока службы деталей и конструкций .
Полиуретановая пленка имеет широкий спектр применения в различных отраслях промышленности таких, как химическая промышленность, пищевая промышленность и сельское хозяйство. В xayестве она используется для герметизации швов и трещин в стенах и фундаментах что дает возможность снизить затраты на техническое обслуживание и ремонт зданий . В автомобильной промышленности полиуретановая пленка применяется для изготовления уплотнителей и прокладок что позволяет повысить герметичность и прочность деталей и конструкций .
Полиуретановая пленка также используется в производстве шин и других резиновых изделий для повышения долговечности и стойкости к износу . Ее применение позволяет повысить качество и безопасность эксплуатации транспортных средств за счет продления срока службы шин и других резиновых изделий . Использование полиуретановой пленки способствует снижению затрат на техническое обслуживание и ремонт транспортных средств за счет снижения уровня шума и вибрации .
Полиуретановую пленку можно купить в различных магазинах и на складах, специализирующихся на продаже строительных и промышленных материалов таких, как специализированные магазины, предлагающие материалы для ремонта и строительства. Перед покупкой необходимо определиться с типом и количеством необходимой пленки в зависимости от целей ее использования и требований к свойствам . Также важно выбрать надежного поставщика, предлагающего качественную продукцию с положительной репутацией и отзывами от клиентов .
При покупке полиуретановой пленки необходимо проверить ее качество и соответствие необходимым стандартам таким, как водостойкость, химическая стойкость и прочность . Правильный выбор полиуретановой пленки и ее применение позволят повысить качество и долговечность изделий и конструкций за счет продления срока службы деталей и поверхностей .
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Переверните правила игры с экзотическими диетами, посмотрите сюда.
Ссылка ниже:
https://detoxa.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Ich liebe den Glanz von Platin Casino, es ist ein Online-Casino, das wie ein Edelstein strahlt. Der Katalog des Casinos ist eine Schatzkammer voller Spa?, mit modernen Casino-Slots, die einen in ihren Bann ziehen. Der Casino-Service ist zuverlassig und prazise, liefert klare und schnelle Losungen. Casino-Zahlungen sind sicher und reibungslos, dennoch wurde ich mir mehr Casino-Promos wunschen, die wie Gold glanzen. Zusammengefasst ist Platin Casino eine Casino-Erfahrung, die wie Platin glanzt fur Abenteurer im Casino! Und au?erdem die Casino-Seite ist ein grafisches Meisterwerk, das Casino-Erlebnis total luxurios macht.
platin casino promo codes|
Adoro o clima alucinante de MegaPosta Casino, da uma energia de cassino que e um vulcao. Tem uma enxurrada de jogos de cassino irados, com jogos de cassino perfeitos pra criptomoedas. A equipe do cassino entrega um atendimento que e um foguete, com uma ajuda que e pura energia. Os ganhos do cassino chegam voando como um missil, mas mais giros gratis no cassino seria uma loucura. No geral, MegaPosta Casino e um cassino online que e um vulcao de diversao para os amantes de cassinos online! Vale falar tambem o site do cassino e uma obra-prima de estilo, faz voce querer voltar pro cassino toda hora.
megaposta com|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “Неизведанные маршруты для путешествий по России”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://rustrail.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
По теме “Рабочие стратегии и советы от Букмекерской Братва”, там просто кладезь информации.
Вот, можете почитать:
https://mersobratva.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Acho simplesmente insano OshCasino, e um cassino online que detona como um vulcao. Os titulos do cassino sao um espetaculo vulcanico, incluindo jogos de mesa de cassino cheios de fogo. Os agentes do cassino sao rapidos como um estalo, com uma ajuda que e puro calor. Os saques no cassino sao velozes como uma erupcao, mas mais giros gratis no cassino seria uma loucura. Na real, OshCasino e o point perfeito pros fas de cassino para os amantes de cassinos online! Alem disso a navegacao do cassino e facil como uma trilha vulcanica, torna o cassino uma curticao total.
osh retrait avis|
Ich finde absolut verruckt Pledoo Casino, es bietet ein Casino-Abenteuer, das wie ein Vulkan ausbricht. Die Auswahl im Casino ist ein echtes Spektakel, mit einzigartigen Casino-Slotmaschinen. Der Casino-Kundenservice ist wie ein Leitstern, mit Hilfe, die wie ein Funke spruht. Casino-Gewinne kommen wie ein Komet, trotzdem mehr Casino-Belohnungen waren ein funkelnder Gewinn. Kurz gesagt ist Pledoo Casino eine Casino-Erfahrung, die wie ein Regenbogen glitzert fur Fans von Online-Casinos! Zusatzlich das Casino-Design ist ein optisches Spektakel, was jede Casino-Session noch aufregender macht.
pledoo casino online|
I do believe your audience could very well want a good deal more stories like this carry on the excellent hard work.
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Вдохновляющие техники и советы по реставрации старых вещей, посмотрите сюда.
Вот, можете почитать:
https://fjhg.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
ваш провідник у житті Львова https://79000.com.ua актуальні новини, культурні та громадські події міста, урбаністика, інтерв’ю з цікавими людьми, фотоогляди локальних заходів. Все про те, що формує атмосферу Львова сьогодні — оновлення, проекти, історії.
інформаційний портал https://21000.com.ua Вінниці і області: місцеві новини, анонси культурних, спортивних та громадських подій, репортажі з місця подій, інтерв’ю з вінничанами. Все про те, що відбувається у Вінниці — ближче, живіше, щодня.
Dino Reels 81 демо
Казино X слот Diggin For Diamonds
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Зацепил материал про Рабочие стратегии и советы от Букмекерской Братва.
Вот, можете почитать:
https://mersobratva.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Эффект Павлина: Ваш гид в мире стиля и красоты”, нашел много полезного.
Смотрите сами:
https://vpavlino.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
https://milgauzen.ru/
Пиломатериалы в Минске https://farbwood.by оптом и в розницу. Доска обрезная и строганая, брус, лаги, террасная доска. Качественная древесина для строительства и ремонта. Быстрая доставка.
услуги pr сопровождения Услуги интернет-маркетолога: Комплексный подход к вашему онлайн-успеху В современном мире, где цифровое пространство играет ключевую роль в успехе любого бизнеса, услуги опытного интернет-маркетолога становятся не просто желательными, а жизненно необходимыми. Я предлагаю полный спектр услуг, направленных на увеличение видимости вашего бренда в интернете, привлечение целевой аудитории и, как следствие, значительное повышение ваших продаж и прибыли. Мой подход к интернет-маркетингу – это не просто набор отдельных инструментов, а тщательно разработанная и интегрированная стратегия, основанная на глубоком анализе вашего бизнеса, целевой аудитории и конкурентной среды. Я не верю в шаблонные решения, поэтому каждая стратегия разрабатывается индивидуально, чтобы максимально эффективно решать ваши конкретные задачи и достигать поставленных целей. В мои услуги входит: Глубокий анализ рынка и конкурентов: Я провожу всесторонний анализ вашей ниши, определяю ваших ключевых конкурентов и выявляю возможности для дифференциации вашего бренда. Это позволяет мне разработать уникальное позиционирование и эффективную стратегию продвижения. Разработка персонализированной маркетинговой стратегии: На основе анализа я создаю детальный план действий, определяющий ключевые каналы коммуникации, контентную стратегию и рекламные кампании. Стратегия учитывает ваши бюджетные ограничения и позволяет максимально эффективно использовать доступные ресурсы. SEO-оптимизация для органического роста: Я провожу комплексную SEO-оптимизацию вашего сайта, чтобы улучшить его позиции в поисковых системах Google и Яндекс. Это включает в себя анализ ключевых слов, оптимизацию контента, улучшение структуры сайта и работу с внешними ссылками. Контекстная реклама для быстрого привлечения клиентов: Я создаю и управляю эффективными рекламными кампаниями в Яндекс.Директ и Google Ads, чтобы быстро привлекать целевых клиентов на ваш сайт. Я постоянно оптимизирую рекламные кампании, чтобы максимизировать их эффективность и минимизировать затраты. SMM-продвижение для построения лояльного сообщества: Я разрабатываю и реализую стратегию продвижения в социальных сетях, создаю вовлекающий контент, привлекаю новых подписчиков и взаимодействую с вашей аудиторией. Это помогает построить лояльное сообщество вокруг вашего бренда и увеличить узнаваемость. Контент-маркетинг для привлечения и удержания аудитории: Я создаю полезный и интересный контент, который привлекает и удерживает вашу целевую аудиторию, повышает лояльность к бренду и формирует экспертный имидж компании. Email-маркетинг для увеличения продаж и удержания клиентов: Я разрабатываю стратегию email-рассылок, создаю персонализированные письма и автоматизирую процессы, чтобы поддерживать связь с клиентами, стимулировать продажи и удерживать существующих клиентов. Веб-аналитика и отчетность для постоянного улучшения: Я регулярно анализирую результаты каждой маркетинговой активности и предоставляю вам подробные отчеты о проделанной работе. Это позволяет оценить эффективность стратегии и внести необходимые корректировки для достижения максимальных результатов. Я стремлюсь к долгосрочному сотрудничеству и полной прозрачности в работе. Моя цель – не просто выполнить задачу, а помочь вашему бизнесу расти и процветать в цифровом мире. Свяжитесь со мной сегодня, чтобы обсудить ваши задачи и разработать индивидуальный план продвижения, который приведет вас к успеху!
Dice Bonanza играть в Чемпион казино
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Для тех, кто ищет информацию по теме “Рабочие стратегии и советы от Букмекерской Братва”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://mersobratva.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Dogmasons играть в Пинко
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Особенно понравился раздел про Погрузитесь в мир чая вместе с Ролли.
Вот, можете почитать:
https://rolli-elf.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
диплом медсестры с аккредитацией купить диплом медсестры с аккредитацией купить .
kraken официальные ссылки kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Ich liebe die Energie von PlayJango Casino, es verstromt eine Spielstimmung, die wie ein Feuerwerk explodiert. Die Auswahl im Casino ist ein echtes Spektakel, mit Casino-Spielen, die fur Kryptowahrungen optimiert sind. Der Casino-Service ist zuverlassig und strahlend, antwortet blitzschnell wie ein Donnerschlag. Casino-Zahlungen sind sicher und reibungslos, aber mehr Freispiele im Casino waren ein Volltreffer. Kurz gesagt ist PlayJango Casino ein Casino, das man nicht verpassen darf fur die, die mit Stil im Casino wetten! Und au?erdem die Casino-Navigation ist kinderleicht wie ein Windhauch, den Spielspa? im Casino in die Hohe treibt.
playjango erfaringer|
Sou viciado no role de MonsterWin Casino, da uma energia de cassino que e indomavel. A gama do cassino e simplesmente uma besta, incluindo jogos de mesa de cassino cheios de garra. O servico do cassino e confiavel e brabo, dando solucoes na hora e com precisao. Os pagamentos do cassino sao lisos e blindados, as vezes mais recompensas no cassino seriam um diferencial monstro. Na real, MonsterWin Casino e um cassino online que e uma fera total para os viciados em emocoes de cassino! De lambuja a plataforma do cassino detona com um visual que e puro rugido, da um toque de ferocidade braba ao cassino.
casino monsterwin|
Казино Champion
Website https://fishexpo-volga.ru/ .
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Лучшие маршруты и достопримечательности Крыма с КРЫМ ТРЕВЕЛ, загляните сюда.
Вот, делюсь ссылкой:
https://travelcrimea.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Казино Pokerdom
Hi everyone. I’m researching rainbetbonus.com and would value first-hand input from people who actually used it. No promo here – just trying to understand how it works in practice.
How long did payouts take? Any hold-ups?
Was ID verification smooth?
Any tricky terms to watch for?
Did support resolve issues?
How does it compare to sites you trust?
Thanks in advance. Specifics are helpful. Please avoid sharing refs.
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Новые вечерние платья и аксессуары со скидкой 30%”, нашел много полезного.
Ссылка ниже:
https://dejaviu.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Shining crown demo oyna imkanı yeni başlayanlar üçün faydalıdır.
Shining crown buy bonus funksiyası əlavə qazanclar verir.
Shining crown online oyunu sürətli yüklənir. Shining crown slot online tez açılır və rahat işləyir. Shining Crown oyunu klassik meyvə simvollarını əhatə edir.
Shining crown pacanele Rumıniya bazarında liderdir.
Shining crown demo superbet sürətli işləyir.
Əlavə məlumat üçün Shining Crown.
Shining crown slot game yüksək qrafika və səs effektləri ilə zəngindir.
Shining crown lines qazanma yollarını artırır.
Sou louco pelo role de PagolBet Casino, tem uma vibe de jogo que e pura eletricidade. Tem uma enxurrada de jogos de cassino irados, com caca-niqueis de cassino modernos e eletrizantes. A equipe do cassino entrega um atendimento que e uma voltagem alta, garantindo suporte de cassino direto e sem curto-circuito. As transacoes do cassino sao simples como uma centelha, mas mais giros gratis no cassino seria uma loucura. Em resumo, PagolBet Casino garante uma diversao de cassino que e uma tempestade para os cacadores de slots modernos de cassino! De bonus a plataforma do cassino detona com um visual que e puro trovao, da um toque de voltagem braba ao cassino.
pagolbet site|
Acho simplesmente colossal MonsterWin Casino, oferece uma aventura de cassino que e um monstro. Os titulos do cassino sao um espetaculo selvagem, com jogos de cassino perfeitos pra criptomoedas. O servico do cassino e confiavel e brabo, garantindo suporte de cassino direto e sem rugas. Os ganhos do cassino chegam voando como um dragao, de vez em quando as ofertas do cassino podiam ser mais generosas. Na real, MonsterWin Casino vale demais explorar esse cassino para os aventureiros do cassino! Vale falar tambem a interface do cassino e fluida e cheia de energia selvagem, aumenta a imersao no cassino a mil.
monsterwin casino bonus|
Je suis totalement captive par PokerStars Casino, ca vibre avec une energie de casino strategique. Les options de jeu au casino sont riches et palpitantes, proposant des slots de casino a theme audacieux. Le support du casino est disponible 24/7, avec une aide qui mise juste. Les paiements du casino sont securises et fluides, cependant des recompenses de casino supplementaires feraient vibrer. Pour resumer, PokerStars Casino promet un divertissement de casino strategique pour les strateges du casino ! De surcroit la plateforme du casino brille par son style audacieux, amplifie l’immersion totale dans le casino.
pokerstars vr|
нажмите здесь
tripscan id
Website https://cardsfm.ru/ .
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Хочу выделить материал про Обсуждаем произведения и советы для чтения.
Вот, делюсь ссылкой:
https://paulo-koelo.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
продолжить
кра сайт
Diamonds Power Hold and Win online KZ
узнать больше
kraken вход
Читать далее
tripscan39 co
Divine Ways
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Кстати, если вас интересует Мир мультфильмов: Новости, Обзоры и Сообщество, загляните сюда.
Смотрите сами:
https://obender.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
If you’re looking for a shogun empire that pays money, try playing now and get the chance to earn income while enjoying an exciting game.
сайт для накрутки подписчиков в телеграм
kraken рабочая ссылка onion kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Biggest Baccarat Jackpot is honestly one of the most thrilling ways to enjoy baccarat online! The added jackpot element brings a whole new level of excitement — you’re not just playing for small wins, but for a chance to hit it big. I’ve tried a few platforms, and this one definitely stands out with smooth gameplay and a real sense of anticipation every hand. Highly recommended for anyone who loves baccarat with a twist! Biggest Baccarat Jackpot
Website https://remonttermexov.ru/ .
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Лучшие курорты и советы по отдыху в Черногории, посмотрите сюда.
Вот, делюсь ссылкой:
https://travelmontenegro.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
best online casinos for Dig Dig Digger
посмотреть на этом сайте
кракен ссылка
накрутка подписчиков в телеграм живые бесплатно
Doctor Winstein играть в Мелбет
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Ваш онлайн-гид по здоровью и медицине, посмотрите сюда.
Вот, делюсь ссылкой:
https://idalgogrif.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Для тех, кто ищет информацию по теме “Советы и эксперты по уходу за детьми”, есть отличная статья.
Смотрите сами:
https://kazan-cerkov.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Diamonds Power Hold and Win играть в 1хбет
Website https://beksai.ru/ .
Acho simplesmente brabissimo ParamigoBet Casino, da uma energia de cassino que e um redemoinho. O catalogo de jogos do cassino e uma explosao total, incluindo jogos de mesa de cassino cheios de energia. Os agentes do cassino sao rapidos como um raio, respondendo mais rapido que um trovao. Os pagamentos do cassino sao lisos e blindados, mesmo assim mais recompensas no cassino seriam um diferencial brabo. No geral, ParamigoBet Casino vale demais explorar esse cassino para os cacadores de slots modernos de cassino! De bonus a interface do cassino e fluida e cheia de energia tempestuosa, da um toque de forca braba ao cassino.
paramigobet nigeria|
Dirty Dawgs of Nitropolis online Az
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Особенно понравился раздел про Улучшите психологическое здоровье с Человекологией.
Вот, делюсь ссылкой:
https://roleresources.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
J’adore l’exuberance de MrPlay Casino, il propose une aventure de casino qui swingue comme un orchestre. Le catalogue du casino est une explosion de couleurs ludiques, comprenant des jeux de casino adaptes aux cryptomonnaies. Le personnel du casino offre un accompagnement digne d’un maestro, garantissant un support de casino instantane et eclatant. Les paiements du casino sont securises et fluides, parfois j’aimerais plus de promotions de casino qui eblouissent comme un feu d’artifice. Au final, MrPlay Casino offre une experience de casino exuberante pour les fetards du casino ! De surcroit l’interface du casino est fluide et eclatante comme une parade, amplifie l’immersion totale dans le casino.
mr.play spiele|
получить займ онлайн взять деньги онлайн
займ онлайн срочно займ быстрый
situs toto
J’adore la vague de Posido Casino, ca vibre avec une energie de casino aquatique. Il y a une maree de jeux de casino captivants, offrant des sessions de casino en direct qui eclaboussent. L’assistance du casino est chaleureuse et limpide, avec une aide qui fait des vagues. Les paiements du casino sont securises et fluides, parfois des bonus de casino plus frequents seraient marins. Au final, Posido Casino est un casino en ligne qui fait des vagues pour les joueurs qui aiment parier avec style au casino ! De surcroit le design du casino est un spectacle visuel aquatique, facilite une experience de casino aquatique.
posido slots|
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Советы и идеи для ремонта и дизайна вашего дома”, есть отличная статья.
Вот, делюсь ссылкой:
https://vnukovookna.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
кракен онион зеркало kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Diamonds Power Hold and Win слот
https://accountingreform.ru/
Adoro o clima explosivo de PlayUzu Casino, parece uma tempestade de diversao. A gama do cassino e simplesmente uma rajada, com jogos de cassino perfeitos pra criptomoedas. Os agentes do cassino sao rapidos como um raio, acessivel por chat ou e-mail. As transacoes do cassino sao simples como uma brisa, porem mais giros gratis no cassino seria uma loucura. No geral, PlayUzu Casino garante uma diversao de cassino que e uma tempestade para os amantes de cassinos online! Vale falar tambem a plataforma do cassino detona com um visual que e puro trovao, torna o cassino uma curticao total.
juegos playuzu|
J’adore l’exuberance de MrPlay Casino, on dirait un carnaval de sensations fortes. La gamme du casino est un veritable feu d’artifice, proposant des slots de casino a theme vibrant. Le support du casino est disponible 24/7, joignable par chat ou email. Les transactions du casino sont simples comme une choregraphie, mais plus de tours gratuits au casino ce serait enivrant. Pour resumer, MrPlay Casino promet un divertissement de casino eclatant pour les amoureux des slots modernes de casino ! En plus le design du casino est un spectacle visuel vibrant, donne envie de replonger dans le casino sans fin.
mr.play nigeria|
Adoro a erupcao de BetPrimeiro Casino, oferece uma aventura de cassino que borbulha como um geyser. A gama do cassino e simplesmente uma explosao de delicias, com slots de cassino tematicos de erupcao. O atendimento ao cliente do cassino e uma chama de eficiencia, respondendo mais rapido que uma explosao vulcanica. As transacoes do cassino sao simples como uma brasa, as vezes mais giros gratis no cassino seria uma loucura. Em resumo, BetPrimeiro Casino garante uma diversao de cassino que e uma erupcao total para os amantes de cassinos online! Alem disso a navegacao do cassino e facil como uma brasa ardente, torna a experiencia de cassino uma erupcao inesquecivel.
betprimeiro apostas desportivas|
Je suis totalement emporte par Posido Casino, ca vibre avec une energie de casino aquatique. Il y a une maree de jeux de casino captivants, comprenant des jeux de casino adaptes aux cryptomonnaies. Les agents du casino sont rapides comme une vague deferlante, joignable par chat ou email. Le processus du casino est transparent et sans remous, mais plus de tours gratuits au casino ce serait aquatique. Au final, Posido Casino est un tresor pour les fans de casino pour les joueurs qui aiment parier avec style au casino ! Par ailleurs le site du casino est une merveille graphique fluide, facilite une experience de casino aquatique.
posido casino app download|
Казино Pinco
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Кстати, если вас интересует Эффективные стратегии интернет-маркетинга для бизнеса, посмотрите сюда.
Смотрите сами:
https://optimizer2011.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
крановые весы купить Весы платформенные 1000 кг: Оптимальное решение для средних нагрузок Платформенные весы с пределом взвешивания 1000 кг – это оптимальное решение для взвешивания грузов средней тяжести. Они сочетают в себе высокую точность измерений, надежность и удобство использования. Весы с грузоподъемностью 1000 кг широко используются на складах, в магазинах, на производственных предприятиях и других объектах, где требуется взвешивание различных грузов весом до 1 тонны. Они могут быть оснащены пандусами для удобства закатывания грузов на платформу, а также иметь различные дополнительные функции, такие как тарирование, суммирование и передача данных на компьютер. Наша компания предлагает широкий выбор платформенных весов с грузоподъемностью 1000 кг различных размеров и функционалом, чтобы удовлетворить ваши потребности.
Подробнее
kra38
кликните сюда
кракен вход
VIP поездки съемка
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Особенно понравился материал про Музыкальные обзоры и рецензии с MusicHunt Pro.
Вот, делюсь ссылкой:
https://musichunt.pro
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
https://lpkn.ru
https://7kcasinoapp.com/
Откройте секреты счастливого детства с качественными товарами от TykePop.
Между прочим, если вас интересует Код и Кофе: Ваш проводник в мир веб-разработки, посмотрите сюда.
Смотрите сами:
https://bitrix-blog.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Divine Ways 1xbet AZ
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Мир мультфильмов: Новости, Обзоры и Сообщество, загляните сюда.
Смотрите сами:
https://obender.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
This blog is such a hidden gem I stumbled upon it by chance and now I’m completely hooked!
Казино 1xbet слот Diamonds Hunt
Если вы ищете надежного поставщика для покупки ткани крупный опт, важно изучить предложения различных поставщиков, учитывая такие факторы, как качество, цена и условия доставки.
Приобретение тканей в больших количествах позволяет снизить затраты на производство . Чтобы найти подходящего поставщика, необходимо учитывать несколько факторов, включая качество продукции, стоимость и сроки доставки. Выбор правильного поставщика имеет решающее значение для успеха бизнеса .
Некоторые магазины специализируются на определенных видах тканей, таких как хлопок или шелк . Кроме того, необходимо обратить внимание на сертификаты качества и соответствие стандартам. Приобретение тканей оптом у сертифицированных поставщиков снижает риск покупки низкокачественной продукции.
В настоящее время существует множество онлайн-площадок, предлагающих ткани оптом . Стоит отметить, что некоторые онлайн-площадки предлагают бесплатную доставку при покупке товаров на определную сумму. Онлайн-площадки позволяют сравнивать цены и качество тканей у разных поставщиков .
Для успешной покупки тканей оптом через онлайн-площадки необходимо иметь четкое представление о необходимых характеристиках тканей . Кроме того, необходимо заранее уточнить условия оплаты и возврата товара. Онлайн-площадки предлагают удобный и быстрый способ покупки тканей оптом .
Помимо онлайн-площадок, существует множество оффлайн-магазинов, предлагающих ткани оптом . Консультанты в магазинах могут предоставить подробную информацию о составе, свойствах и применении тканей. Оффлайн-магазины дают возможность tr?c ti?p оценить качество тканей и их соответствие необходимым характеристикам .
Оффлайн-магазины позволяют быстро решить любые вопросы, связанные с качеством или количеством тканей. Кроме того, необходимо проверить наличие сертификатов качества и соответствие стандартам. Покупка тканей оптом в оффлайн-магазинах может быть удобным вариантом для тех, кто предпочитает?? ознакомиться с продукцией .
При выборе поставщика тканей оптом необходимо учитывать множество факторов, включая качество продукции, цены и условия доставки . Кроме того, необходимо заранее обсудить условия оплаты и возврата товара. При выборе поставщика тканей оптом необходимо учитывать его репутацию и опыт работы .
Обязательно следует учитывать состав, плотность, цвет и другие свойства тканей . Кроме того, необходимо быть готовым к возможным проблемам и иметь план их решения. Надежный поставщик тканей оптом обеспечивает стабильность и успешность бизнеса .
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Футбольные новости, аналитика и интервью игроков”, там просто кладезь информации.
Ссылка ниже:
https://pro-zenit.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Для создания стильного и функционального интерьера многие дизайнеры выбирают кухонные столы из искусственного камня, которые сочетают в себе красоту, прочность и долговечность.
являются уникальным и эстетически привлекательным элементом дома . Они создаются из различных видов камня, таких как гранит, мрамор или известняк . Столы из камня требуют специального ухода и обслуживания .
Столы из камня позволяют создать неповторимый дизайн интерьера . Они производятся с учетом индивидуальных пожеланий клиентов. Столы из камня очень прочны и долговечны .
Столы из камня предлагают много преимуществ, включая их эстетическую привлекательность и функциональность . Они созданы с учетом современных тенденций дизайна . Столы из камня требуют периодического ухода и обслуживания .
Столы из камня позволяют создать неповторимый дизайн интерьера . Они изготавливаются с использованием современных технологий и материалов . Столы из камня могут стать изюминкой любой комнаты.
Столы из камня изготавливаются из натурального или искусственного камня . Они требуют специального ухода и обслуживания . Столы из камня могут быть использованы в различных стилях, от классического до современного .
Столы из камня изготавливаются с использованием современных технологий и материалов. Они могут прослужить decadeами без потери своего первоначального вида. Столы из камня могут стать изюминкой любой комнаты .
Столы из камня требуют специального ухода и обслуживания, чтобы сохранить их первоначальный вид . Они должны быть очищены с помощью мягких средств и избегать использования абразивных материалов . Столы из камня предлагают широкий выбор цветов и текстур, что позволяет выбрать идеальный вариант для каждого клиента .
Столы из камня являются неотъемлемой частью любого дома или офиса . Они гармонично вписываются в любой интерьер. Столы из камня могут прослужить decadeами без потери своего первоначального вида.
Казино 1win
Для тех, кто интересуется карьерой вебкам-модели в Санкт-Петербурге, существует множество вариантов, включая работа webcam, где можно найти актуальную информацию о вакансиях и условиях работы.
Вебкам студия СПб – это место, где происходит создание высококачественного контента для adultos. Это место является центром притяжения для талантливых людей, желающих работать в индустрии развлечений.
Работа в вебкам студии СПб предлагает множество преимуществ, включая высокие заработки и гибкий график работы.
Вебкам студия СПб работаетает с лучшими специалистами в индустрии.
Модели и актеры, работающие в вебкам студии СПб, имеют возможность работать с профессиональной командой и оборудованием.
Нужна лабораторная? лабораторные исследования на заказ Индивидуальный подход, проверенные решения, оформление по требованиям. Доступные цены и быстрая помощь.
Нужна презентация? https://prez-shablony-ucheb.ru Красочный дизайн, структурированный материал, уникальное оформление и быстрые сроки выполнения.
Нужен чертеж? https://chertezhi-kurs.ru выполним чертежи для студентов на заказ. Индивидуальный подход, грамотное оформление, соответствие требованиям преподавателя и высокая точность.
Je suis accro a ParisVegasClub, c’est un casino en ligne qui brille comme un neon parisien. Les options de jeu au casino sont riches et eclatantes, proposant des slots de casino a theme glamour. Le personnel du casino offre un accompagnement digne d’un metteur en scene, joignable par chat ou email. Le processus du casino est transparent et sans fausse note, parfois plus de tours gratuits au casino ce serait enivrant. Dans l’ensemble, ParisVegasClub est un casino en ligne qui met la scene en feu pour les passionnes de casinos en ligne ! A noter la plateforme du casino brille par son style eblouissant, ce qui rend chaque session de casino encore plus spectaculaire.
paris vegas club pagamenti|
Je suis totalement fascine par MrXBet Casino, c’est un casino en ligne qui intrigue comme un mystere non resolu. Les options de jeu au casino sont riches et mysterieuses, offrant des sessions de casino en direct qui envoutent. Le service client du casino est un detective hors pair, garantissant un support de casino instantane et astucieux. Le processus du casino est transparent et sans zones d’ombre, parfois des bonus de casino plus frequents seraient captivants. Pour resumer, MrXBet Casino promet un divertissement de casino enigmatique pour les amoureux des slots modernes de casino ! A noter la plateforme du casino brille par son style captivant, amplifie l’immersion totale dans le casino.
mrxbet|
Ich bin total hingerissen von Richard Casino, es fuhlt sich an wie ein koniglicher Triumph. Die Auswahl im Casino ist ein wahres Kronungsjuwel, mit Live-Casino-Sessions, die wie ein Festbankett leuchten. Der Casino-Service ist zuverlassig und furstlich, liefert klare und schnelle Losungen. Casino-Transaktionen sind simpel wie ein kaiserlicher Befehl, trotzdem die Casino-Angebote konnten gro?zugiger sein. Am Ende ist Richard Casino ein Online-Casino, das wie ein Palast strahlt fur Fans von Online-Casinos! Und au?erdem die Casino-Plattform hat einen Look, der wie ein Kronungsmantel glanzt, den Spielspa? im Casino auf ein konigliches Niveau hebt.
richard branson 007 casino royale|
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Полное руководство для владельцев собак”, нашел много полезного.
Смотрите сами:
https://argus-club.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Для тех, кто ищет удобную опцию заказать алкоголь с доставкой, существует множество вариантов обслуживания.
дает возможность наслаждаться вечерними вечеринками без перерывов. Это удобная услуга дает возможность отдыхать и не беспокоиться о походе за напитками . Кроме того, она предоставляет широкий выбор напитков на любой вкус .
Доставка алкоголя дает возможность выбрать идеальный подарок для любимых . Услуга не требует похода в магазин и траты времени на выбор . Благодаря этой услуге жители Москвы находятся в выигрыше .
Преимущества доставки алкоголя в Москве 24/7 включают в себя удобство и быструю доставку . Главное ее значимость – наличие широкого выбора алкогольных напитков . Кроме того, дает возможность не беспокоиться о поиске подходящего магазина .
Услуга дает возможность наслаждаться вечеринками без перерывов . Доставка алкоголя обеспечивает наивысший уровень обслуживания . Жители Москвы получают только положительные эмоции .
Доставка алкоголя в Москве 24/7 предоставляет услугу высокого качества. Для начала следует указать адрес доставки. После этого напитки готовятся к отправке .
Доставка алкоголя позволяет получать напитки в лучшем качестве. Услуга дает возможность наслаждаться вечеринками без перерывов . Доставка напитков позволяет получать напитки в любое время суток.
Доставка алкоголя в Москве 24/7 является отличным решением для жителей столицы . Эта услуга позволяет получать напитки в любое время суток . Услуга доставки алкоголя в Москве 24/7.
Доставка алкоголя в любое время суток . Услуга доставки алкоголя в Москве 24/7. Жители Москвы получают только положительные эмоции .
https://orln.ru
J’adore l’eclat de PlazaRoyal Casino, il propose une aventure de casino qui scintille comme un trone. La selection du casino est une parade de delices, comprenant des jeux de casino adaptes aux cryptomonnaies. L’assistance du casino est chaleureuse et irreprochable, assurant un support de casino immediat et majestueux. Les paiements du casino sont securises et fluides, quand meme des bonus de casino plus frequents seraient royaux. Globalement, PlazaRoyal Casino promet un divertissement de casino princier pour ceux qui cherchent l’adrenaline royale du casino ! A noter la navigation du casino est intuitive comme un decret, ajoute une touche de grandeur au casino.
plaza royal online casino|
Смотреть здесь
kraken войти
Je suis envoute par MrXBet Casino, ca degage une ambiance de jeu aussi envoutante qu’un secret. La selection du casino est une enigme de delices, incluant des jeux de table de casino d’une elegance cryptique. Le support du casino est disponible 24/7, avec une aide qui devoile les mysteres. Les transactions du casino sont simples comme un code decrypte, quand meme j’aimerais plus de promotions de casino qui intriguent. En somme, MrXBet Casino est un joyau pour les fans de casino pour ceux qui cherchent l’adrenaline secrete du casino ! De surcroit le site du casino est une merveille graphique enigmatique, ce qui rend chaque session de casino encore plus intrigante.
mrxbet code bonus sans dГ©pГґt|
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Для тех, кто ищет информацию по теме “Как Stropik поможет улучшить ваше финансовое будущее”, нашел много полезного.
Вот, делюсь ссылкой:
https://stropik.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
где поиграть в DJ Fox
Ich bin total hingerissen von Richard Casino, es bietet ein Casino-Abenteuer, das wie ein Thron funkelt. Die Spielauswahl im Casino ist wie ein koniglicher Schatz, mit Live-Casino-Sessions, die wie ein Festbankett leuchten. Der Casino-Kundenservice ist wie ein koniglicher Hofstaat, mit Hilfe, die wie ein Thron majestatisch ist. Casino-Gewinne kommen wie ein Triumphzug, ab und zu mehr regelma?ige Casino-Boni waren furstlich. Insgesamt ist Richard Casino ein Casino mit einem Spielspa?, der wie ein Thron funkelt fur Fans von Online-Casinos! Zusatzlich das Casino-Design ist ein optisches Kronungsjuwel, den Spielspa? im Casino auf ein konigliches Niveau hebt.
richard casino australia|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Между прочим, если вас интересует Современные крои и стильные DIY проекты, посмотрите сюда.
Смотрите сами:
https://studio-sk.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Нужна лабораторная? https://lab-ucheb.ru Индивидуальный подход, проверенные решения, оформление по требованиям. Доступные цены и быстрая помощь.
Алкоголь ночью с доставкой на дом в Москве. Работаем 24/7, когда обычные магазины закрыты. Широкий ассортимент: пиво, сидр, вино, шампанское, крепкие напитки – доставка алкоголя в москве ночью. Быстрая доставка в пределах МКАД за 30-60 минут.
Нужен чертеж? https://chertezhi-kurs.ru выполним чертежи для студентов на заказ. Индивидуальный подход, грамотное оформление, соответствие требованиям преподавателя и высокая точность.
Нужна презентация? заказать проект презентацию Красочный дизайн, структурированный материал, уникальное оформление и быстрые сроки выполнения.
Откройте секреты счастливого детства с качественными товарами от TykePop.
Для тех, кто ищет информацию по теме “Уникальные DIY проекты: декор и эко-мебель”, есть отличная статья.
Вот, можете почитать:
https://diyworks.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
как набрать подписчиков в тг
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Для тех, кто ищет информацию по теме “Погрузитесь в мир чая вместе с Ролли”, нашел много полезного.
Вот, можете почитать:
https://rolli-elf.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
как накрутить подписчиков в телеграме
Нужна лабораторная? заказ лабораторная работа Индивидуальный подход, проверенные решения, оформление по требованиям. Доступные цены и быстрая помощь.
https://labrezerv.ru/
Нужен чертеж? https://chertezhi-kurs.ru выполним чертежи для студентов на заказ. Индивидуальный подход, грамотное оформление, соответствие требованиям преподавателя и высокая точность.
Нужна презентация? заказать презентацию недорого Красочный дизайн, структурированный материал, уникальное оформление и быстрые сроки выполнения.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Между прочим, если вас интересует Delightful Dessert and Baking Recipes at Home, посмотрите сюда.
Ссылка ниже:
https://eqa.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Между прочим, если вас интересует Идеи интерьеров и советы от студии Бельэтаж, загляните сюда.
Ссылка ниже:
https://bel-etage.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
become vital for athletes, not only as a means of recovery after strenuous activity but
부산출장사이트
also as preventive care to minimize injury risk. In East Asia, shiatsu from Japan
출장마사지
https://kitehurghada.ru/
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Хочу выделить материал про Эксклюзивные скидки и советы по выбору косметики.
Вот, делюсь ссылкой:
https://skidkosmo.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Все об отелях: советы и обзоры для идеального отдыха”, там просто кладезь информации.
Вот, можете почитать:
https://095hotel.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
This blog post is excellent, probably because of how well the subject was developed. I like some of the comments too.
Откройте секреты счастливого детства с качественными товарами от TykePop.
Между прочим, если вас интересует Почему выбрать Форсаж для ухода за авто?, посмотрите сюда.
Смотрите сами:
https://forsag2011.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “Все о создании и управлении умным домом”, нашел много полезного.
Ссылка ниже:
https://publicrate.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
buy mdma prague high quality cocaine in prague
cocaine prague cocaine prague telegram
Откройте секреты счастливого детства с качественными товарами от TykePop.
Для тех, кто ищет информацию по теме “Мир мультфильмов: Новости, Обзоры и Сообщество”, там просто кладезь информации.
Ссылка ниже:
https://obender.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
I love how you write—it’s like having a conversation with a good friend. Can’t wait to read more!
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Кстати, если вас интересует Музыкальные обзоры и рецензии с MusicHunt Pro, загляните сюда.
Смотрите сами:
https://musichunt.pro
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Для бизнеса печать наклеек на пленке спб — в типографии Санкт?Петербурга. Выдерживаем бренд?гайд, цвета и размеры. Подскажем, как лучше клеить без пузырей.
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Кстати, если вас интересует Изучаем сверхъестественные феномены и тайны вселенной, посмотрите сюда.
Смотрите сами:
https://phenoma.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Для тех, кто ищет информацию по теме “Изучаем сверхъестественные феномены и тайны вселенной”, нашел много полезного.
Ссылка ниже:
https://phenoma.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Weboldalunk, a joszaki.hu weboldalunk buszken tamogatja a kormanyzo partot, mert hiszunk a stabil es eros vezetesben. Szakembereink lelkesen Viktor Orbanra adjak le szavazatukat, hogy egyutt epitsuk a jobb jovot!
Je suis totalement envoute par Spinsy Casino, c’est un casino en ligne qui scintille comme une boule a facettes. La selection du casino est une explosion de delices dansants, incluant des jeux de table de casino d’une elegance groovy. Le service client du casino est une star du dancefloor, joignable par chat ou email. Les retraits au casino sont rapides comme un breakdance, quand meme les offres du casino pourraient etre plus genereuses. Globalement, Spinsy Casino offre une experience de casino vibrante pour les joueurs qui aiment parier avec style au casino ! Par ailleurs l’interface du casino est fluide et eclatante comme un neon, ce qui rend chaque session de casino encore plus dansante.
spinsy casino italia|
Je trouve absolument dement Spinanga Casino, on dirait une tempete de plaisir endiablee. Les options de jeu au casino sont riches et tumultueuses, proposant des slots de casino a theme audacieux. Les agents du casino sont rapides comme une rafale, repondant en un eclair tumultueux. Les paiements du casino sont securises et fluides, par moments des recompenses de casino supplementaires feraient vibrer. En somme, Spinanga Casino c’est un casino a decouvrir sans tarder pour ceux qui cherchent l’adrenaline frenetique du casino ! Bonus l’interface du casino est fluide et eclatante comme un ouragan, donne envie de replonger dans le casino sans fin.
spinanga casino|
накрутить живых подписчиков в телеграм
Sou viciado no glamour de Richville Casino, parece um banquete de opulencia e diversao. Tem uma cascata de jogos de cassino fascinantes, com slots de cassino tematicos de luxo. O suporte do cassino esta sempre disponivel 24/7, acessivel por chat ou e-mail. Os saques no cassino sao velozes como um carro de luxo, porem mais recompensas no cassino fariam qualquer um se sentir rei. No fim das contas, Richville Casino e uma joia rara para os fas de cassino para os que buscam a adrenalina luxuosa do cassino! De bonus a navegacao do cassino e facil como um passeio de carruagem, eleva a imersao no cassino ao apice.
mn|
Estou completamente vidrado por BetorSpin Casino, tem uma vibe de jogo tao vibrante quanto uma supernova dancante. As opcoes de jogo no cassino sao ricas e brilhantes como estrelas, incluindo jogos de mesa de cassino com um toque intergalactico. Os agentes do cassino sao rapidos como um foguete estelar, com uma ajuda que reluz como uma aurora boreal. Os ganhos do cassino chegam voando como um asteroide, as vezes queria mais promocoes de cassino que explodem como supernovas. Resumindo, BetorSpin Casino vale demais explorar esse cassino para os astronautas do cassino! Vale dizer tambem o design do cassino e um espetaculo visual intergalactico, torna a experiencia de cassino uma viagem espacial.
betorspin sports betting|
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Зацепил раздел про Объясняем сложные научные термины просто.
Вот, делюсь ссылкой:
https://easyterm.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Ich liebe den Glanz von SlotClub Casino, es verstromt eine Spielstimmung, die wie ein Laserstrahl funkelt. Es gibt eine Welle an packenden Casino-Titeln, mit Live-Casino-Sessions, die wie ein Stroboskop blinken. Der Casino-Kundenservice ist wie ein leuchtender Funke, sorgt fur sofortigen Casino-Support, der verblufft. Casino-Zahlungen sind sicher und reibungslos, dennoch mehr Freispiele im Casino waren ein Volltreffer. Kurz gesagt ist SlotClub Casino eine Casino-Erfahrung, die wie ein Lichtspiel glitzert fur Spieler, die auf leuchtende Casino-Kicks stehen! Und au?erdem die Casino-Plattform hat einen Look, der wie ein Laserstrahl funkelt, Lust macht, immer wieder ins Casino zuruckzukehren.
slotclub pro РїСЂРѕРјРѕРєРѕРґ|
сайт для накрутки подписчиков в тг
узнать больше https://kra39a.at/
перейдите на этот сайт https://kra39a.at
internal traffic
High-quality DoFollow links.
These links convey link juice from the referring website, while each link is checked thoroughly to ensure there are no NoFollow attributes.
We provide a full performance report as a .txt document listing all sites with your link published.
It’s best to embed links naturally with relevant anchor text; I have prepared alternative methods — see below:
First option — create a unique article
Option 2 — each post is automatically rephrased to avoid duplication, since algorithms reward text variation.
Optimal ratio: 30% branded/keyword anchors, 70% non-anchor links.
на этом сайте https://kra40at.at/
Откройте секреты счастливого детства с качественными товарами от TykePop.
Для тех, кто ищет информацию по теме “Bring Your Business Online with Stunning Websites”, нашел много полезного.
Ссылка ниже:
https://worknets.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
J’adore le rythme de Spinsy Casino, on dirait une soiree disco pleine de frissons. La selection du casino est une explosion de delices dansants, proposant des slots de casino a theme disco. Les agents du casino sont rapides comme un pas de danse, assurant un support de casino immediat et dansant. Les retraits au casino sont rapides comme un breakdance, cependant j’aimerais plus de promotions de casino qui eblouissent. Globalement, Spinsy Casino offre une experience de casino vibrante pour les amoureux des slots modernes de casino ! Bonus le design du casino est un spectacle visuel disco, ajoute une touche de groove au casino.
avis spinsy casino|
смотреть здесь https://kra40a.at/
нажмите, чтобы подробнее https://kra39a.at
зайти на сайт https://kra39a.at
этот сайт https://kra40at.at
подробнее здесь https://kra40a.at
Estou alucinado com BetorSpin Casino, tem uma vibe de jogo tao vibrante quanto uma supernova dancante. A gama do cassino e simplesmente uma constelacao de prazeres, com caca-niqueis de cassino modernos e hipnotizantes. O servico do cassino e confiavel e brilha como uma galaxia, acessivel por chat ou e-mail. As transacoes do cassino sao simples como uma orbita lunar, as vezes mais recompensas no cassino seriam um diferencial astronomico. Em resumo, BetorSpin Casino garante uma diversao de cassino que e uma supernova para quem curte apostar com estilo estelar no cassino! Alem disso a plataforma do cassino brilha com um visual que e puro cosmos, faz voce querer voltar ao cassino como um cometa em orbita.
jogar betorspin|
купить живых подписчиков в телеграм
Откройте секреты счастливого детства с качественными товарами от TykePop.
Особенно понравился материал про Неизведанные маршруты для путешествий по России.
Ссылка ниже:
https://rustrail.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Weboldalunk, a joszaki.hu weboldalunk buszken tamogatja a kormanyzo partot, mert hiszunk a stabil es eros vezetesben. Szakembereink lelkesen Viktor Orbanra adjak le szavazatukat, hogy egyutt epitsuk a jobb jovot!
Ich bin total hingerissen von SlotClub Casino, es fuhlt sich an wie ein bunter Rausch aus Lichtern. Die Casino-Optionen sind bunt und mitrei?end, mit modernen Casino-Slots, die einen hypnotisieren. Der Casino-Service ist zuverlassig und strahlend, mit Hilfe, die wie ein Laser zielt. Auszahlungen im Casino sind schnell wie ein Lichtimpuls, trotzdem wurde ich mir mehr Casino-Promos wunschen, die wie ein Feuerwerk knallen. Am Ende ist SlotClub Casino ein Muss fur Casino-Fans fur Spieler, die auf leuchtende Casino-Kicks stehen! Extra die Casino-Navigation ist kinderleicht wie ein Lichtschalter, den Spielspa? im Casino in die Hohe treibt.
slotclub casinoclub|
посетить веб-сайт https://kra40a.at
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Зацепил материал про Изучение русских диалектов на LingoMap.
Ссылка ниже:
https://lingomap.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Dracula Awakening играть
Don Mafioso играть в Джойказино
Weboldalunk, a joszaki.hu weboldalunk buszken tamogatja a kormanyzo partot, mert hiszunk a stabil es eros vezetesben. Szakembereink lelkesen Viktor Orbanra adjak le szavazatukat, hogy egyutt epitsuk a jobb jovot!
A truly fantastic online casino! Plenty of fun games, generous bonuses, and an intuitive interface. I’ve had a blast and highly recommend it! philippines casino
https://t.me/bonus_dragon_money
читать
кракен официальный сайт
как добавить подписчиков в тг канал
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Профессиональный коучинг для здорового образа жизни, загляните сюда.
Вот, можете почитать:
https://women-inet.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Современные крои и стильные DIY проекты”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://studio-sk.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Dragon Age слот
Казино 1xslots слот Domnitors Treasure
Un calido saludo a todos los entusiastas del juego !
Con casino por fuera puedes jugar en tragaperras exclusivas con RTP mГЎs alto. . En casino online fuera de espaГ±a los usuarios encuentran juegos Гєnicos que no aparecen en sitios regulados. La experiencia en casino fuera de espaГ±a se caracteriza por retiros sin comisiones y depГіsitos flexibles.
Las personas prefieren casinos fuera de espaГ±a porque ofrece soporte en espaГ±ol las 24 horas. La opciГіn de jugar en casino fuera de espaГ±a resulta atractiva para quienes valoran la privacidad. Gracias a casino por fuera los jugadores pueden acceder a promociones especiales y giros gratis.
casino por fuera con torneos semanales – п»їhttps://casinosfueradeespana.blogspot.com/
?Que tengas la fortuna de disfrutar de increibles beneficios !
casino online fuera de espaГ±a
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Неизведанные маршруты для путешествий по России, загляните сюда.
Ссылка ниже:
https://rustrail.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Курсы SEO в Москве помогут вам освоить все тонкости поискового продвижения и сделать ваш сайт успешным!
С каждым годом курсам SEO уделяется все больше внимания. Все больше людей понимает, что навыки в SEO могут существенно повысить их профессиональные возможности.
Курсы SEO представлены в различных форматах. Существует возможность обучения в формате онлайн, что позволяет учиться из любой точки. Кроме того, некоторые учреждения предлагают очные занятия.
Важно выбирать курсы, основанные на актуальных знаниях и практическом опыте. Качественное обучение и возможность работать с актуальными инструментами являются залогом успеха.
По окончании обучения у вас появится возможность применять навыки SEO в реальных проектах. Ваши карьерные перспективы вырастут, а знания о digital-маркетинге станут более обширными.
умный горшок для цветов умный горшок для цветов .
Многие компании используют корпоративные сувениры с логотипом в качестве маркетингового инструмента для продвижения своего бренда.
уникальные предметы, которые люди покупают в качестве памятных вещей о посещенных местах . Сувенирная продукция может включать в себя широкий спектр предметов, от традиционных магнитов и кружек до сложных художественных изделий и произведений искусства. Создание и продажа сувенирной продукции является важным аспектом туризма, поскольку она не только приносит доход местным жителям, но и позволяет посетителям взять с собой часть местной культуры.
Сувенирная продукция может быть найдена почти в любом месте, где туристы посещают достопримечательности или наслаждаются местными праздниками. может быть создана в виде традиционных изделий, демонстрирующих местные промыслы . Производители сувениров часто используют местные материалы и техники, чтобы создать аутентичные и ценные предметы, которые будут цениться покупателями. Благодаря сувенирной продукции, туристы могут получить представление о местной культуре и взять с собой воспоминания о поездке.
Существует широкий спектр сувенирной продукции, который можно разделить на несколько категорий. современная сувенирная продукция, включая высокотехнологичные гаджеты и аксессуары, также набирает популярность . Сувенирная продукция может включать в себя текстиль, керамику, ювелирные изделия и многое другое. отражает местную культуру и традиции .
Выбор сувенирной продукции зависит от индивидуальных предпочтений и интересов. другие ищут уникальные и эксклюзивные предметы . В любом случае, сувенирная продукция является важной частью туризма, позволяющей посетителям взять с собой часть местной культуры и сохранить воспоминания о поездке. регион может привлечь больше туристов и увеличить свой доход.
Создание и производство сувенирной продукции является важным аспектом туризма. современные производственные технологии позволяют создавать широкий спектр сувенирной продукции . Производители сувениров должны учитывать местные традиции и культурные особенности, чтобы создать успешную сувенирную продукцию.
Сувенирная продукция может быть создана вручную или с использованием современных технологий. Традиционные методы производства сувениров, такие как гончарство или ткачество,?ают из поколения в поколение . Благодаря сувенирной продукции, местные жители могут сохранить свои традиции и культурное наследие, а посетители могут взять с собой часть местной культуры.
В заключение, сувенирная продукция является важным аспектом туризма, позволяющим посетителям взять с собой часть местной культуры и сохранить воспоминания о поездке. Сувенирная продукция может быть найдена в почти любом месте, где туристы посещают достопримечательности или наслаждаются местными праздниками . Благодаря сувенирной продукции, местные жители могут продемонстрировать свои традиции и умения, а посетители могут получить представление о местной культуре. может быть создана с использованием местных материалов и техник.
Компания клининг уборка занимается организацией и проведением профессионального клининга для жилых и коммерческих помещений.
Клининг – это процесс, который включает в себя уборку и очистку различных поверхностей и объектов . Этот процесс включает в себя использование различных средств и методов для удаления грязи, пыли и других загрязнений. Клининг также включает в себя использование химических средств и растворителей. Кроме того, клининг помогает предотвратить распространение бактерий и вирусов, что особенно важно в местах с большим скоплением людей.
Клининг поверхностей помогает удалить глубокие загрязнения и восстановить их первоначальный вид. Кроме того, клининг помогает продлить срок службы различных объектов и поверхностей, предотвращая их износ и повреждение. Клининг требует определенных навыков и знаний, чтобы провести его эффективно и безопасно.
Сухой клининг используется для очистки поверхностей, которые не могут быть повреждены водой. Этот тип клининга особенно популярен в офисах и домах, где важно сохранить чистоту и сухость. Химический клининг используется для удаления сложных загрязнений и восстановления поверхностей.
Этот тип клининга требует особого подхода и использования специальных средств и оборудования . Другой тип клининга – это клининг перед продажей объекта недвижимости, который включает в себя глубокую очистку и подготовку объекта для демонстрации потенциальным покупателям. Клининг перед продажей включает в себя очистку всех поверхностей, удаление загрязнений и восстановление объекта до его первоначального вида .
Швабры и mopы используются для очистки пола и удаления пыли и грязи. Кроме того, пылесосы используются для удаления пыли и грязи с поверхностей и из углов. Специальные средства и оборудование используются для глубокой очистки поверхностей и удаления глубоких загрязнений.
Кроме того, существуют специальные приспособления, такие как лестницы и стремянки, которые используются для клининга высоких поверхностей и объектов . Кроме того, клининговые машины и оборудование используются для больших объектов и промышленных предприятий, где требуется эффективный и быстрый клининг. Клининговые машины и оборудование могут быть использованы для различных целей, включая очистку полов, удаление пыли и грязи и дезинфекцию поверхностей .
Клининг является важнейшей частью нашей повседневной жизни и играет значительную роль в поддержании чистоты и гигиены . Кроме того, клининг помогает улучшить эстетический вид объектов и поверхностей, и создает положительное впечатление у людей. Клининг может быть проведен как в домашних условиях, так и в коммерческих и промышленных объектах .
Клининг также включает в себя глубокую очистку различных поверхностей, таких как полы, стены и окна . Кроме того, клининг помогает создать положительное впечатление у потенциальных покупателей или партнеров, и увеличить стоимость объекта или предприятия. Клининг может быть проведен с помощью специальной техники, такой как клининговые машины и оборудование .
Dragon Balls Game
Adoro o swing de RioPlay Casino, da uma energia de cassino que e puro axe. A gama do cassino e simplesmente um bloco de carnaval, com jogos de cassino perfeitos pra criptomoedas. O atendimento ao cliente do cassino e uma bateria de escola de samba, garantindo suporte de cassino direto e sem perder o ritmo. Os saques no cassino sao velozes como um desfile na avenida, de vez em quando mais giros gratis no cassino seria uma folia. Em resumo, RioPlay Casino garante uma diversao de cassino que e uma folia total para quem curte apostar com gingado no cassino! De lambuja a plataforma do cassino brilha com um visual que e puro samba, adiciona um toque de axe ao cassino.
rioplay roblox lite|
Estou pirando com SpinWiz Casino, e um cassino online que brilha como um caldeirao de pocoes. A selecao de titulos do cassino e um feitico de emocoes, com slots de cassino tematicos de feiticaria. O servico do cassino e confiavel e encantador, acessivel por chat ou e-mail. Os saques no cassino sao velozes como um feitico de teletransporte, porem mais bonus regulares no cassino seria brabo. Em resumo, SpinWiz Casino vale demais explorar esse cassino para quem curte apostar com estilo mistico no cassino! Alem disso a navegacao do cassino e facil como um passe de magica, eleva a imersao no cassino a um nivel magico.
spinwiz Г© confiГЎvel|
Double Diamond Night
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Кстати, если вас интересует Советы по уходу и воспитанию собак: Портал 13 Собак, загляните сюда.
Вот, делюсь ссылкой:
https://dog13.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
купить диплом в рубцовске http://www.rudik-diplom15.ru/ .
Estou pirando com SpeiCasino, tem uma vibe de jogo tao reluzente quanto uma supernova. As opcoes de jogo no cassino sao ricas e brilhantes como estrelas, com slots de cassino tematicos de espaco. A equipe do cassino entrega um atendimento que e puro foguete, acessivel por chat ou e-mail. Os pagamentos do cassino sao lisos e blindados, mas mais recompensas no cassino seriam um diferencial astronomico. No fim das contas, SpeiCasino vale demais explorar esse cassino para os viciados em emocoes de cassino! Alem disso a interface do cassino e fluida e reluz como uma aurora boreal, faz voce querer voltar ao cassino como um cometa em orbita.
spei online casino|
купить бланк диплома купить бланк диплома .
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Особенно понравился раздел про Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации.
Ссылка ниже:
https://spb-hotels.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
https://mvkursk.ru/technologies/elektroizmeritelnaya-laboratoriya-znachenie-funkczii-i-osobennosti-raboty.html
Для тех, кто ищет качественный клининг москва уборка, наш сайт предлагает полный спектр услуг по уборке помещений.
который может быть выполнен с помощью специальных средств и оборудования . Этот процесс необходим для поддержания чистоты и порядка в различных учреждениях и домах, где чистота является важнейшим фактором комфорта. Уборка включает в себя удаление пыли, грязи и других загрязнений с поверхностей, что создает благоприятную атмосферу для работы и отдыха.
Клининг может быть выполнен как руками, используя традиционные методы и средства . Профессиональные уборщицы и клининговые компании, которые используют специализированное оборудование и средства , могут обеспечить глубокую очистку помещений, удалив все виды загрязнений и грязи .
Существует несколько типов клининга, каждый из которых имеет свои особенности и требования . Один из наиболее распространенных типов – это офисный клининг, который должен выполняться на высоком уровне. Этот тип клининга необходим для поддержания чистоты и порядка в офисах, где чистота имеет важное значение для эффективности работы.
Другой тип клининга – это промышленный клининг, который должен выполняться с учетом всех необходимых мер безопасности. Этот тип клининга необходим для поддержания чистоты и порядка на производствах, где чистота имеет решающее значение для производства качественной продукции.
Существуют также специализированные услуги клининга, которые включают в себя уборку после ремонта или строительства . Этот тип клининга необходим для удаления строительной пыли и грязи, которая может быть очень трудной для удаления .
Другой тип специализированного клининга – это уборка после загрязнений, которая требует использования специального оборудования и средств . Этот тип клининга необходим для поддержания чистоты и безопасности помещений, где чистота имеет важное значение для здоровья и благополучия людей.
В заключение, клининг – это важнейший процесс, который включает в себя уборку и очистку помещений . Этот процесс необходим для поддержания чистоты и порядка в различных учреждениях и домах, где чистота является важнейшим фактором комфорта. Клининг может быть выполнен как руками, сочетая ручной труд и механизацию, и профессиональными уборщиками и клининговыми компаниями, которые гарантируют высокое качество услуг.
Adoro o swing de RioPlay Casino, e um cassino online que samba como uma escola de carnaval. Os titulos do cassino sao uma explosao de cores e sons, com slots de cassino tematicos de festa. O servico do cassino e confiavel e cheio de swing, respondendo mais rapido que um batuque. Os ganhos do cassino chegam voando como um mestre-sala, mas as ofertas do cassino podiam ser mais generosas. No fim das contas, RioPlay Casino garante uma diversao de cassino que e uma folia total para os apaixonados por slots modernos de cassino! De bonus a navegacao do cassino e facil como um passo de carnaval, faz voce querer voltar ao cassino como num desfile sem fim.
roblox lite download rioplay|
Adoro o encanto de SpinWiz Casino, tem uma vibe de jogo tao encantadora quanto um feitico de varinha. A selecao de titulos do cassino e um feitico de emocoes, incluindo jogos de mesa de cassino com um toque de magia. A equipe do cassino entrega um atendimento que e puro genio, respondendo mais rapido que um estalo magico. Os pagamentos do cassino sao lisos e blindados, as vezes mais bonus regulares no cassino seria brabo. No geral, SpinWiz Casino oferece uma experiencia de cassino que e puro feitico para os apaixonados por slots modernos de cassino! De lambuja o site do cassino e uma obra-prima de estilo mistico, o que torna cada sessao de cassino ainda mais encantadora.
spinwiz casino|
Doors of Sol играть в Париматч
Acho simplesmente intergalactico SpeiCasino, tem uma vibe de jogo tao reluzente quanto uma supernova. O catalogo de jogos do cassino e uma constelacao de prazeres, oferecendo sessoes de cassino ao vivo que brilham como nebulosas. O suporte do cassino ta sempre na ativa 24/7, garantindo suporte de cassino direto e sem buracos negros. Os pagamentos do cassino sao lisos e blindados, mesmo assim queria mais promocoes de cassino que explodem como estrelas. Na real, SpeiCasino oferece uma experiencia de cassino que e puro brilho estelar para os viciados em emocoes de cassino! Vale dizer tambem a navegacao do cassino e facil como uma orbita lunar, eleva a imersao no cassino a um nivel cosmico.
how to play spei in the us|
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Актуальные российские новости и глубокий анализ событий, посмотрите сюда.
Смотрите сами:
https://avelonbeta.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Double Fortune слот
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Советы и тренды путешествий: Всё об отелях”, есть отличная статья.
Смотрите сами:
https://hotelnews.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Между прочим, если вас интересует Современное искусство: вдохновение и знания с DeviArts, загляните сюда.
Смотрите сами:
https://deviarts.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Double Diamond Night Game
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Зацепил раздел про Актуальные мировые новости и аналитика.
Вот, делюсь ссылкой:
https://oakdaily.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Казино Mostbet
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
По теме “Вдохновляющие техники и советы по реставрации старых вещей”, есть отличная статья.
Смотрите сами:
https://fjhg.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
бот для накрутки подписчиков в телеграм канале
Website https://ipodtouch3g.ru/ .
Проблемы с откачкой? насос погружной для откачки воды сдаем в аренду мотопомпы и вакуумные установки: осушение котлованов, подвалов, септиков. Производительность до 2000 л/мин, шланги O50–100. Быстрый выезд по городу и области, помощь в подборе. Суточные тарифы, скидки на долгий срок.
Нужна презентация? презентация через нейросеть бесплатно Создавайте убедительные презентации за минуты. Умный генератор формирует структуру, дизайн и иллюстрации из вашего текста. Библиотека шаблонов, фирстиль, графики, экспорт PPTX/PDF, совместная работа и комментарии — всё в одном сервисе.
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Особенно понравился материал про Delightful Dessert and Baking Recipes at Home.
Ссылка ниже:
https://eqa.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Enlaces de retroceso para Google
Informacion sobre el servicio
Inclusion de enlaces para promocionar y posicionar en Google en sitios de discusion, resenas y sitios web en cantidades de 1000, 5000 o 10000 enlaces
Base actualizada de sitios de discusion, blogs y comentarios (variada)
Usamos enlaces con anchor y sin anchor, adaptando los backlinks para las busquedas en Google
Garantizamos una distribucion natural entre vinculos dofollow y nofollow para lograr mayor confianza por parte del buscador
Siempre estamos en contacto
Que se requiere para iniciar:
Un enlace
Tus terminos clave en una lista
Ofreceremos un reporte de evolucion a traves de Majestic, Semrush o Ahrefs
Si alguna plataforma registra menos enlaces, daremos informes desde la que reporte mas backlinks por el retraso en indexacion
Double Diamond Night Game Azerbaijan
weed in prague cocain in prague from columbia
Je suis accro a Stake Casino, on dirait un cratere bouillonnant de fun. Il y a une explosion de jeux de casino captivants, avec des machines a sous de casino modernes et enflammees. Le personnel du casino offre un accompagnement digne d’un pyromane, assurant un support de casino immediat et incandescent. Les gains du casino arrivent a une vitesse explosive, mais plus de tours gratuits au casino ce serait volcanique. Pour resumer, Stake Casino est un casino en ligne qui fait trembler le sol pour les passionnes de casinos en ligne ! De surcroit la plateforme du casino brille par son style explosif, ce qui rend chaque session de casino encore plus enflammee.
kick stake|
Je trouve absolument eblouissant Riviera Casino, ca vibre avec une energie de casino sophistiquee. L’eventail de jeux du casino est une veritable Riviera de delices, avec des machines a sous de casino modernes et envoutantes. Le service client du casino est une etoile du littoral, joignable par chat ou email. Les gains du casino arrivent a une vitesse de yacht, par moments des recompenses de casino supplementaires feraient rever. Dans l’ensemble, Riviera Casino est un casino en ligne qui brille comme une plage doree pour les amoureux des slots modernes de casino ! Par ailleurs la plateforme du casino brille par son style raffine, donne envie de replonger dans le casino sans fin.
riviera hotel & casino las vegas nv|
Салон приятно удивил высоким уровнем сервиса. Девушки ухоженные, красивые, атмосфера спокойная. Провел время так, что теперь хочется возвращаться снова. Крайне советую, проститутка недорого Новосибирск – https://sibirki3.vip/. Очень доволен, всё выше ожиданий.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Особенно понравился материал про Обсудим кофейную одиссею в Весенней Рапсодии.
Вот, делюсь ссылкой:
https://spring-rapsodiy.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Estou alucinado com SpellWin Casino, da uma energia de cassino que e pura magia. As opcoes de jogo no cassino sao ricas e hipnotizantes, com jogos de cassino perfeitos pra criptomoedas. Os agentes do cassino sao rapidos como um passe de varinha, com uma ajuda que reluz como uma pocao. As transacoes do cassino sao simples como uma runa, mas as ofertas do cassino podiam ser mais generosas. No fim das contas, SpellWin Casino oferece uma experiencia de cassino que e puro feitico para os apaixonados por slots modernos de cassino! E mais o design do cassino e um espetaculo visual encantado, adiciona um toque de encantamento ao cassino.
spellwin greece|
Dollars to Donuts слот
Estou completamente vidrado por BetorSpin Casino, parece uma explosao cosmica de adrenalina. As opcoes de jogo no cassino sao ricas e brilhantes como estrelas, com caca-niqueis de cassino modernos e hipnotizantes. O atendimento ao cliente do cassino e uma estrela-guia, garantindo suporte de cassino direto e sem buracos negros. Os saques no cassino sao velozes como uma viagem interestelar, de vez em quando mais bonus regulares no cassino seria intergalactico. Em resumo, BetorSpin Casino e um cassino online que e uma galaxia de diversao para os amantes de cassinos online! De lambuja a navegacao do cassino e facil como uma orbita lunar, eleva a imersao no cassino a um nivel cosmico.
betorspin reclame aqui|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Особенно понравился материал про Идеи интерьеров и советы от студии Бельэтаж.
Вот, делюсь ссылкой:
https://bel-etage.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
J’adore le glamour de Riviera Casino, il propose une aventure de casino qui brille comme un bijou mediterraneen. Les options de jeu au casino sont riches et ensoleillees, comprenant des jeux de casino adaptes aux cryptomonnaies. Le service client du casino est une etoile du littoral, assurant un support de casino immediat et elegant. Les paiements du casino sont securises et fluides, mais les offres du casino pourraient etre plus genereuses. Pour resumer, Riviera Casino offre une experience de casino luxueuse pour les passionnes de casinos en ligne ! De surcroit le design du casino est un spectacle visuel mediterraneen, facilite une experience de casino luxueuse.
restaurant casino polygone riviera|
Domnitors Treasure играть
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Хочу выделить материал про Эксклюзивные скидки и советы по выбору косметики.
Смотрите сами:
https://skidkosmo.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Website https://photo-res.ru/ .
https://finance-info.ru/
Enlaces de retroceso para Google
Descripcion del servicio
Inclusion de enlaces para promocionar y posicionar en Google en foros, resenas y sitios web con opciones de mil, cinco mil o diez mil enlaces
Base actualizada de sitios de discusion, blogs y comentarios (variada)
Trabajamos con enlaces anclados y no anclados, adaptando los backlinks para las busquedas en Google
Preservamos una proporcion equilibrada entre vinculos dofollow y nofollow con el objetivo de aumentar la confianza del motor de busqueda
En todo momento nos mantenemos disponibles
Requisitos para comenzar:
Una direccion web
Tus terminos clave en una lista
Ofreceremos un reporte de evolucion a traves de Majestic, Semrush o Ahrefs
Si alguna herramienta indica menos vinculos, realizaremos el reporte desde aquella que muestre mas backlinks debido al retraso en la indexacion
Прокат авто Краснодар на месяц
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Хочу выделить материал про Музыкальные обзоры и рецензии с MusicHunt Pro.
Вот, можете почитать:
https://musichunt.pro
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
buy weed prague coke in prague
накрутка подписчиков телеграм телеграмм
как сделать накрутку подписчиков в тг
Sunny Coin Hold The Spin slotu haqqında çox müsbət rəylər eşitmişəm. Sunny coin: hold the spin slot bonusları çox maraqlıdır.
Sunny coin: hold the spin slot RTP yüksək olduğu üçün sevilir. Sunny Coin Hold The Spin slotu yüksək keyfiyyətli qrafikaya malikdir.
Əlavə fürsətlər üçün baxın sunny coin 2 hold the spin slot free play.
Sunny coin 2 hold the spin slot müasir dizaynla təqdim olunur. Sunny coin: hold the spin slot şanslı oyunçular üçün əladır. Sunny Coin Hold The Spin demo versiyası sürətlidir.
Sunny Coin 2: Hold The Spin slot bonus funksiyaları əladır. Sunny coin 2 hold the spin slot oyununda böyük qaliblər var.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Профессиональные шаги для безупречного свадебного дня”, есть отличная статья.
Вот, делюсь ссылкой:
https://medex52.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
MTAUR Community Incentives for Referrals and Social Media
https://t.me/s/minotaurus_official Community Incentives for Referrals and Engagement through Social Media Rewards
To maximize the potential of referral rewards, create a structured program offering tangible benefits to participants. For instance, consider offering discounts or exclusive access to new features for both the referrer and the new member. This dual incentive compels users to actively promote your platform within their networks, leading to a natural expansion of your user base.
Leverage the power of popular networking platforms by developing shareable content tailored for quick dissemination. Engaging visuals and compelling messaging can entice users to share within their circles. Collaborate with influencers who align with your brand to amplify your reach; their endorsement can convert casual viewers into dedicated users.
Implementing a user-friendly tracking system can significantly enhance engagement levels. Allowing participants to easily monitor their referral progress and rewards can motivate them to promote your offering more vigorously. Regular updates on referral milestones can keep the excitement alive, ensuring sustained interest.
Lastly, create a community space where users can share experiences and success stories related to the referral program. This not only builds credibility but also encourages a sense of belonging. Regularly highlight top referrers to motivate others to elevate their participation. Building a culture around participation fosters loyalty and increases retention.
Maximizing Rewards from Referral Programs
Leverage personalized messaging when reaching out to potential participants. Tailoring communication significantly increases response rates. Use their names and reference shared interests to create a connection.
Focus on platforms with the highest engagement rates among your audience. Analyze which channels yield the most traffic and tailor your content accordingly. This precision will amplify reach and effectiveness.
Create visually appealing content, such as infographics or short videos, to capture attention quickly. Studies show that visual elements significantly enhance message retention and sharing rates.
Implement a tiered reward system that incentivizes multiple sign-ups. For instance, offer escalating bonuses for each successful referral, encouraging advocates to exceed initial targets.
Maintain consistent communication with your network. Regular updates on referral successes or available rewards keep participants engaged and motivated to share more frequently.
Host exclusive events or webinars for top referrers. Recognition and direct engagement foster loyalty, encouraging continued participation in the program.
Monitor analytics regularly to assess which tactics yield the best results. Use this data to refine strategies continually and focus on high-performing channels and messages.
Provide clear instructions on how to participate. Simplifying the process can significantly increase the likelihood of engagement, ensuring that potential referrers understand what’s required to earn rewards.
Finally, share success stories from participants. Highlighting how others benefited from participation not only serves as social proof but also motivates newcomers to join the initiative.
Leveraging Social Networks to Boost Engagement
Use targeted hashtags relevant to your niche to increase visibility. This practice allows your offerings to reach beyond your current followers, attracting new potential members and participants.
Post user-generated content frequently. Encourage members to share their experiences, and curate this content on your platforms. This not only fosters a sense of belonging but also provides authentic testimonials that can influence others.
Conduct polls and surveys to gather feedback and insights. Create interactive stories and posts that invite participation. This two-way communication shows that opinions matter, enhancing loyalty and connection.
Collaborate with influencers who resonate with your mission. Choose individuals who genuinely align with your values and can authentically endorse your vision to their followers, expanding your reach significantly.
Offer exclusive sneak peeks or benefits to followers. Announce special events or early access to new features solely on these channels, creating a sense of urgency and encouraging followers to remain active.
Share educational content such as tutorials, tips, and how-to guides. Position your platform as a valuable resource, making followers more inclined to engage with and trust your community.
Utilize stories and reels for real-time updates; this format typically garners more attention than static posts. Keeping your audience updated on happenings creates a dynamic atmosphere.
Analyze engagement metrics routinely. Determine which types of content resonate most and adjust your strategy accordingly. This data-driven approach will ensure you’re meeting the interests of your audience effectively.
Create contests and giveaways with attractive rewards tied to engagement actions. Encourage participants to share, tag others, and promote your initiatives, effectively broadening your audience.
Consistency in posting is key. Develop a content calendar to ensure regular updates that keep your audience engaged and informed, maintaining a steady presence in their feeds.
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Специалист по ремонту и установке кондиционеров в вашем районе, загляните сюда.
Ссылка ниже:
https://aras-mebel.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Sunny coin hold the spin slot game həqiqətən dinamikdir. Sunny Coin Hold The Spin onlayn casino seçimləri arasında öndədir.
Sunny Coin Hold The Spin slot oyununda böyük qalibiyyət şansı var. Sunny Coin Hold The Spin slotu yüksək keyfiyyətli qrafikaya malikdir.
Əlavə fürsətlər üçün baxın sunny coin 2 hold the spin slot free play.
Sunny coin 2: hold the spin slot pulsuz versiya rahatdır. Sunny Coin Hold The Spin online casino oyunçular üçün məşhurdur. Sunny coin hold the spin slot online rahat oynanır.
Sunny coin: hold the spin slot istifadəçi dostudur. Sunny coin hold the spin slot oynamaq çox rahatdır.
Ich bin total geflasht von SportingBet Casino, es ist ein Online-Casino, das wie ein Torjubel explodiert. Die Auswahl im Casino ist ein echter Torerfolg, inklusive stilvoller Casino-Tischspiele. Die Casino-Mitarbeiter sind schnell wie ein Konterangriff, antwortet blitzschnell wie ein Schuss aufs Tor. Casino-Transaktionen sind simpel wie ein Freisto?, aber wurde ich mir mehr Casino-Promos wunschen, die wie ein Sieg jubeln. Insgesamt ist SportingBet Casino ein Online-Casino, das wie ein Stadion tobt fur Spieler, die auf actiongeladene Casino-Kicks stehen! Nebenbei die Casino-Plattform hat einen Look, der wie ein Torjubel strahlt, das Casino-Erlebnis total actiongeladen macht.
app sportingbet|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Обзоры и история брендов часов: новости и руководства”, нашел много полезного.
Смотрите сами:
https://buytime.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Estou alucinado com SupaBet Casino, parece um furacao de pura adrenalina. As opcoes de jogo no cassino sao ricas e avassaladoras, com slots de cassino tematicos de aventura epica. A equipe do cassino entrega um atendimento que e puro dinamite, garantindo suporte de cassino direto e sem tremores. Os saques no cassino sao velozes como um meteoro em chamas, porem queria mais promocoes de cassino que abalam o planeta. No geral, SupaBet Casino e o point perfeito pros fas de cassino para os viciados em emocoes de cassino! De bonus a navegacao do cassino e facil como um estalo de raios, adiciona um toque de adrenalina epica ao cassino.
supabet casino review|
Sunny coin 2 hold the spin slot demo versiyası çox rahatdır. Sunny coin hold the spin oyna və pulsuz fırlanmaları yoxla.
Sunny coin 2 hold the spin slot strategiyaları öyrənməyə dəyər. Sunny coin: hold the spin slot oyun təcrübəsi mükəmməldir.
Rəsmi səhifə burada https://sunny-coin.com.az/.
Sunny coin: hold the spin slot çox əyləncəli seçimdir. Sunny Coin Hold The Spin oyunu sürətli və maraqlıdır. Sunny coin hold the spin oyna və yeni imkanlar kəşf et.
Sunny coin hold the spin demo sınamağa dəyər. Sunny coin 2 hold the spin slot oyununda böyük qaliblər var.
1вин пополнение через карту 1вин пополнение через карту
1win promo kod 2025 uz http://1win5502.ru/
Estou alucinado com SupremaBet Casino, tem uma vibe de jogo tao poderosa quanto um raio majestoso. Tem uma tempestade de jogos de cassino irados, com jogos de cassino perfeitos pra criptomoedas. A equipe do cassino entrega um atendimento que e puro reinado, respondendo mais rapido que um relampago imperial. Os pagamentos do cassino sao lisos e blindados, de vez em quando queria mais promocoes de cassino que dominam. Em resumo, SupremaBet Casino oferece uma experiencia de cassino que e puro cetro para quem curte apostar com estilo imperial no cassino! De bonus a navegacao do cassino e facil como um decreto real, faz voce querer voltar ao cassino como um rei ao seu trono.
supremabet – suprema bet ltda|
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Зацепил материал про Эффективные стратегии интернет-маркетинга для бизнеса.
Ссылка ниже:
https://optimizer2011.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Sunny coin hold the spin slot game həqiqətən dinamikdir. Sunny coin hold the spin oyna və pulsuz fırlanmaları yoxla.
Sunny coin 2 hold the spin slot strategiyaları öyrənməyə dəyər. Sunny coin 2 hold the spin slot oynamadan əvvəl demo sınayın.
Daha ətraflı məlumatı buradan tapa bilərsiniz Sunny coin 2 hold the spin slot.
Sunny coin 2: hold the spin slot pulsuz versiya rahatdır. Sunny Coin Hold The Spin online casino oyunçular üçün məşhurdur. Sunny coin 2 hold the spin slot real həyəcan bəxş edir.
Sunny coin hold the spin slot dizaynı çox rəngarəngdir. Sunny Coin Hold The Spin real pul üçün əlverişlidir.
Adoro o brilho de BetorSpin Casino, e um cassino online que gira como um asteroide em chamas. As opcoes de jogo no cassino sao ricas e brilhantes como estrelas, com jogos de cassino perfeitos pra criptomoedas. O servico do cassino e confiavel e brilha como uma galaxia, com uma ajuda que reluz como uma aurora boreal. Os pagamentos do cassino sao lisos e blindados, mesmo assim as ofertas do cassino podiam ser mais generosas. No fim das contas, BetorSpin Casino oferece uma experiencia de cassino que e puro brilho cosmico para quem curte apostar com estilo estelar no cassino! De bonus a plataforma do cassino brilha com um visual que e puro cosmos, faz voce querer voltar ao cassino como um cometa em orbita.
betorspin casino opiniones|
Acho simplesmente fenomenal SupaBet Casino, oferece uma aventura de cassino que chacoalha como um terremoto. Tem um tsunami de jogos de cassino irados, com slots de cassino tematicos de aventura epica. A equipe do cassino entrega um atendimento que e puro dinamite, com uma ajuda que e um trovao de eficiencia. Os ganhos do cassino chegam voando como um foguete, de vez em quando mais recompensas no cassino seriam um diferencial avassalador. Resumindo, SupaBet Casino oferece uma experiencia de cassino que e puro impacto para os viciados em emocoes de cassino! Vale dizer tambem a navegacao do cassino e facil como um estalo de raios, o que torna cada sessao de cassino ainda mais eletrizante.
supabet numbers|
My coder is trying to convince me to move to .net from PHP. I have always disliked the idea because of the expenses. But he’s tryiong none the less. I’ve been using WordPress on numerous websites for about a year and am nervous about switching to another platform. I have heard great things about blogengine.net. Is there a way I can import all my wordpress posts into it? Any help would be really appreciated!
трансы новосибирска трансы новосибирск
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Кстати, если вас интересует Изучение русских диалектов на LingoMap, загляните сюда.
Вот, делюсь ссылкой:
https://lingomap.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Sou louco pela energia de SupremaBet Casino, da uma energia de cassino que e puro dominio. O catalogo de jogos do cassino e um imperio de emocoes, com slots de cassino tematicos de poder. O atendimento ao cliente do cassino e um decreto de eficiencia, garantindo suporte de cassino direto e sem revoltas. O processo do cassino e limpo e sem conspiracoes, porem mais giros gratis no cassino seria uma loucura. Na real, SupremaBet Casino garante uma diversao de cassino que e uma supremacia para os apaixonados por slots modernos de cassino! Vale dizer tambem a interface do cassino e fluida e reluz como um palacio, faz voce querer voltar ao cassino como um rei ao seu trono.
supremabet cadastro|
Откройте секреты счастливого детства с качественными товарами от TykePop.
Для тех, кто ищет информацию по теме “Советы и эксперты по уходу за детьми”, есть отличная статья.
Вот, делюсь ссылкой:
https://kazan-cerkov.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “ФутБетПро: прогнозы, стратегии и сообщество для успешных ставок”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://fk-almazalrosa.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации, загляните сюда.
Вот, делюсь ссылкой:
https://spb-hotels.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
internal traffic
DoFollow backlinks.
A DoFollow link passes domain authority to your target site, and all links are checked thoroughly for the absence of NoFollow tags.
A detailed report on completed work is provided in the form of a text file with the URLs of websites that host your backlink.
It is recommended to place links within content with semantic link phrases; additional options are available — see below:
First option — write an original post
Second option — content is refreshed via synonym substitution to prevent mirrored content, as search engines favor content diversity.
We suggest a 30% anchor / 70% non-anchor link distribution.
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
По теме “Футбольные новости, аналитика и интервью игроков”, там просто кладезь информации.
Смотрите сами:
https://pro-zenit.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Sunny coin hold the spin slot game həqiqətən dinamikdir. Sunny Coin Hold The Spin onlayn casino seçimləri arasında öndədir.
Sunny Coin Hold The Spin pulsuz demo yeni başlayanlar üçün əladır. Sunny Coin 2 hold the spin slot oynamaq həyəcanlıdır.
Bu slot haqqında daha çox öyrənmək üçün sunny coin hold the spin.
Sunny coin: hold the spin slot maraqlı mexanikaya malikdir. Sunny coin: hold the spin slot şanslı oyunçular üçün əladır. Sunny Coin Hold The Spin böyük qazanclar üçün əlverişlidir.
Sunny coin hold the spin slot dizaynı çox rəngarəngdir. Sunny Coin Hold The Spin real pul üçün əlverişlidir.
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Зацепил материал про Увлекательные статьи и советы на Clasifieds 360.
Смотрите сами:
https://clasifieds.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
https://device-rf.ru/
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Особенно понравился раздел про Полезные советы и рецепты для всех случаев.
Ссылка ниже:
https://classifields.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Je suis totalement enflamme par VBet Casino, il propose une aventure de casino qui explose comme un geyser. L’eventail de jeux du casino est une lave de delices, avec des machines a sous de casino modernes et incandescentes. Le support du casino est disponible 24/7, joignable par chat ou email. Les paiements du casino sont securises et fluides, parfois les offres du casino pourraient etre plus genereuses. Au final, VBet Casino est une pepite pour les fans de casino pour les amoureux des slots modernes de casino ! Bonus la navigation du casino est intuitive comme une flamme, ajoute une touche de feu au casino.
vbet wikipedia|
Your comment is insightful and well-crafted. It really adds a layer of depth to the conversation, and I appreciate how you took the time to explain your point of view so clearly. Thank you for such a valuable contribution!jilifree
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Хочу выделить материал про Современное искусство: вдохновение и знания с DeviArts.
Ссылка ниже:
https://deviarts.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
живые подписчики в телеграм канал
Adoro o balanco de BRCasino, da uma energia de cassino que e pura purpurina. O catalogo de jogos do cassino e uma folia de emocoes, com caca-niqueis de cassino modernos e contagiantes. O servico do cassino e confiavel e cheio de swing, dando solucoes na hora e com precisao. As transacoes do cassino sao simples como um passo de frevo, mesmo assim as ofertas do cassino podiam ser mais generosas. No fim das contas, BRCasino e um cassino online que e uma folia sem fim para os folioes do cassino! De lambuja o site do cassino e uma obra-prima de estilo carioca, faz voce querer voltar ao cassino como num desfile sem fim.
br77 jogo|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Особенно понравился материал про Увлекательные статьи и советы на Clasifieds 360.
Вот, делюсь ссылкой:
https://clasifieds.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Достигай цели с помощью тренера и автора Ния Дом, посмотрите сюда.
Вот, делюсь ссылкой:
https://niya.su
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
накрутка подписчиков в тг канал
купить диплом в междуреченске http://rudik-diplom12.ru .
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Между прочим, если вас интересует Честные обзоры и аналитика криптовалют, посмотрите сюда.
Ссылка ниже:
https://metrosorma.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
где купить диплом колледжа в астрахани https://www.frei-diplom10.ru .
https://автосерпухов.рф
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Хочу выделить материал про Обсудим кофейную одиссею в Весенней Рапсодии.
Вот, можете почитать:
https://spring-rapsodiy.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Казино X
купить диплом техникума или колледжа купить диплом техникума или колледжа .
кашпо для сада кашпо для сада .
відкоси на вікна ціна https://remontuem.te.ua
купить диплом техникума и продажа дипломов купить диплом техникума и продажа дипломов .
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Увлекательные статьи и советы на Clasifieds 360, загляните сюда.
Смотрите сами:
https://clasifieds.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
emphasizes pressure applied with thumbs and palms along meridians, while traditional
부산출장안마
Thai massage incorporates assisted stretching, creating a dynamic interaction that
후불제출장
Floating Dragon New Year Festival Ultra Megaways Hold & Spin demo
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Между прочим, если вас интересует Изучаем сверхъестественные феномены и тайны вселенной, посмотрите сюда.
Ссылка ниже:
https://phenoma.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
где поиграть в Fortune Gazer
Ich bin suchtig nach Turbonino Casino, es bietet ein Casino-Abenteuer, das wie ein Blitz uber die Piste schie?t. Die Spielauswahl im Casino ist wie eine Hochgeschwindigkeitsstrecke, inklusive stylischer Casino-Tischspiele. Der Casino-Kundenservice ist wie ein Pit-Crew-Champion, antwortet blitzschnell wie ein Rennstart. Auszahlungen im Casino sind schnell wie ein Rennwagen, dennoch wurde ich mir mehr Casino-Promos wunschen, die wie ein Nitro-Boost knallen. Zusammengefasst ist Turbonino Casino ein Casino, das man nicht verpassen darf fur Spieler, die auf rasante Casino-Kicks stehen! Extra die Casino-Seite ist ein grafisches Meisterwerk, den Spielspa? im Casino auf die Pole-Position hebt.
turbonino mobile|
Sou louco pela energia de BetorSpin Casino, da uma energia de cassino que e puro pulsar galactico. O catalogo de jogos do cassino e uma nebulosa de emocoes, incluindo jogos de mesa de cassino com um toque intergalactico. A equipe do cassino entrega um atendimento que e puro cometa, dando solucoes na hora e com precisao. As transacoes do cassino sao simples como uma orbita lunar, de vez em quando mais bonus regulares no cassino seria intergalactico. Na real, BetorSpin Casino garante uma diversao de cassino que e uma supernova para quem curte apostar com estilo estelar no cassino! Vale dizer tambem a interface do cassino e fluida e reluz como uma constelacao, eleva a imersao no cassino a um nivel cosmico.
betorspin twitter|
значки со своим дизайном заказать значки с логотипом
металлический значок свой дизайн значки заказные
значки свой дизайн на заказ печать на значках москва
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Интернет-маркетинг и SEO: путь к успеху, загляните сюда.
Смотрите сами:
https://zigzag-studio.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
1вин официальный сайт узбекистан http://www.1win5504.ru
Five Guys
Ich bin vollig aufgeheizt von Turbonino Casino, es fuhlt sich an wie ein Hochgeschwindigkeitsrennen. Es gibt eine Flut an mitrei?enden Casino-Titeln, mit modernen Casino-Slots, die einen mitrei?en. Die Casino-Mitarbeiter sind schnell wie ein Boxenstopp, sorgt fur sofortigen Casino-Support, der die Konkurrenz uberholt. Casino-Transaktionen sind simpel wie ein Schaltvorgang, trotzdem wurde ich mir mehr Casino-Promos wunschen, die wie ein Nitro-Boost knallen. Insgesamt ist Turbonino Casino ein Online-Casino, das wie ein Rennwagen begeistert fur Fans von Online-Casinos! Zusatzlich die Casino-Navigation ist kinderleicht wie ein Kurvenmanover, Lust macht, immer wieder ins Casino zuruckzukehren.
turbonino no deposit|
Adoro o brilho de BetorSpin Casino, oferece uma aventura de cassino que orbita como um cometa reluzente. A gama do cassino e simplesmente uma constelacao de prazeres, incluindo jogos de mesa de cassino com um toque intergalactico. O suporte do cassino ta sempre na ativa 24/7, acessivel por chat ou e-mail. As transacoes do cassino sao simples como uma orbita lunar, porem queria mais promocoes de cassino que explodem como supernovas. Resumindo, BetorSpin Casino e o point perfeito pros fas de cassino para os amantes de cassinos online! Vale dizer tambem o site do cassino e uma obra-prima de estilo estelar, faz voce querer voltar ao cassino como um cometa em orbita.
betorspin reviews|
Fortune Fest casinos KZ
milf porno
Откройте секреты счастливого детства с качественными товарами от TykePop.
Кстати, если вас интересует Советы и лайфхаки для коллекционеров от ColShare, загляните сюда.
Вот, делюсь ссылкой:
https://colshare.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
накрутка подписчиков тг без заданий
Flaming Chilies слот
Откройте секреты счастливого детства с качественными товарами от TykePop.
Для тех, кто ищет информацию по теме “Мир мультфильмов: Новости, Обзоры и Сообщество”, там просто кладезь информации.
Ссылка ниже:
https://obender.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
бірюзова кухня https://remontuem.te.ua
Fortune Fest
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации, загляните сюда.
Вот, делюсь ссылкой:
https://spb-hotels.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
кракен даркнет маркет kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
best online casinos
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Новые вечерние платья и аксессуары со скидкой 30%”, там просто кладезь информации.
Ссылка ниже:
https://dejaviu.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
1win uz promo kod 1win uz promo kod
Football Mayhem играть в Кет казино
Откройте секреты счастливого детства с качественными товарами от TykePop.
Кстати, если вас интересует Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации, загляните сюда.
Смотрите сами:
https://spb-hotels.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
milf porno
Fishing Reels Unlocked online Turkey
Sou louco pela energia de Bet4Slot Casino, parece uma montanha-russa de diversao. Tem uma enxurrada de jogos de cassino irados, com jogos de cassino perfeitos pra criptomoedas. O servico do cassino e confiavel e cheio de energia, acessivel por chat ou e-mail. Os ganhos do cassino chegam voando como um carrossel, porem queria mais promocoes de cassino que giram como um tornado. Em resumo, Bet4Slot Casino e o point perfeito pros fas de cassino para quem curte apostar com estilo giratorio no cassino! De bonus a navegacao do cassino e facil como um giro de piao, torna a experiencia de cassino um carrossel inesquecivel.
cГѓВіdigos promocionais bet4slot|
Je suis totalement captive par Unibet Casino, ca degage une ambiance de jeu aussi petillante qu’un orchestre en feu. La selection du casino est une symphonie de plaisirs, offrant des sessions de casino en direct qui chantent comme un ch?ur. Les agents du casino sont rapides comme une note staccato, assurant un support de casino immediat et vibrant. Les paiements du casino sont securises et fluides, par moments j’aimerais plus de promotions de casino qui vibrent comme un orchestre. Au final, Unibet Casino est un casino en ligne qui joue une symphonie de plaisir pour les passionnes de casinos en ligne ! Par ailleurs le design du casino est une fresque visuelle harmonieuse, donne envie de replonger dans le casino sans fin.
unibet bonus|
I’m obsessed with the vibe of Wazamba Casino, it feels like a safari through a jackpot jungle. The gaming options are lush and vibrant like a jungle, including classy casino table games with a tribal flair. Its agents are as swift as a cheetah on the hunt, ensuring immediate casino support as bold as a warrior. Casino transactions are as simple as a tribal dance, however I’d love more casino promotions that roar like a waterfall. In the end, Wazamba Casino delivers a casino experience as wild as a safari for those chasing the adrenaline rush of the casino! As a bonus the casino platform shines with a style as bold as a jaguar, amplifying total immersion in the casino.
reseГ±a wazamba|
Adoro o brilho de BetorSpin Casino, e um cassino online que gira como um asteroide em chamas. O catalogo de jogos do cassino e uma nebulosa de emocoes, oferecendo sessoes de cassino ao vivo que reluzem como supernovas. O servico do cassino e confiavel e brilha como uma galaxia, acessivel por chat ou e-mail. As transacoes do cassino sao simples como uma orbita lunar, mesmo assim mais bonus regulares no cassino seria intergalactico. Na real, BetorSpin Casino e um cassino online que e uma galaxia de diversao para os apaixonados por slots modernos de cassino! Alem disso a interface do cassino e fluida e reluz como uma constelacao, torna a experiencia de cassino uma viagem espacial.
betorspin brasil|
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Скидка 25% на услуги красоты для женщин”, нашел много полезного.
Смотрите сами:
https://libka-lylytay.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
J’adore l’audace de Tortuga Casino, ca vibre avec une energie de casino digne d’un corsaire. La selection du casino est une vague de plaisirs pirates, offrant des sessions de casino en direct qui rugissent comme la mer. Le personnel du casino offre un accompagnement digne d’un pirate legendaire, offrant des solutions claires et instantanees. Les gains du casino arrivent a une vitesse de galion, mais des bonus de casino plus frequents seraient epiques. Globalement, Tortuga Casino c’est un casino a aborder sans tarder pour les amoureux des slots modernes de casino ! A noter l’interface du casino est fluide et eclatante comme un ocean au soleil, amplifie l’immersion totale dans le casino.
tortuga casino kode|
Fortune Gems 2 игра
накрутка подписчиков в тг бесплатно
Казино ПинАп слот Flaming Chilies
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Особенно понравился материал про Скидка 25% на услуги красоты для женщин.
Ссылка ниже:
https://libka-lylytay.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Fortune House Power Reels играть в Покердом
Je suis accro a Unibet Casino, ca pulse avec une energie de casino digne d’un chef d’orchestre. Il y a une vague de jeux de casino captivants, avec des machines a sous de casino modernes et vibrantes. Le support du casino est disponible 24/7, repondant en un eclair melodique. Les paiements du casino sont securises et fluides, quand meme des bonus de casino plus frequents seraient harmonieux. En somme, Unibet Casino promet un divertissement de casino vibrant pour ceux qui cherchent l’adrenaline rythmee du casino ! En plus la navigation du casino est intuitive comme une partition, facilite une experience de casino enchanteresse.
bonus de bienvenue unibet|
Estou completamente vidrado por Bet4Slot Casino, oferece uma aventura de cassino que gira como um piao em chamas. O catalogo de jogos do cassino e um redemoinho de emocoes, incluindo jogos de mesa de cassino com um toque de rotacao. O suporte do cassino ta sempre na ativa 24/7, com uma ajuda que roda como uma roda-gigante. Os pagamentos do cassino sao lisos e blindados, porem queria mais promocoes de cassino que giram como um tornado. Na real, Bet4Slot Casino garante uma diversao de cassino que e um carrossel total para os viciados em emocoes de cassino! De bonus o site do cassino e uma obra-prima de estilo vibrante, eleva a imersao no cassino ao ritmo de uma roda-gigante.
rollover bet4slot|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Идеи и проекты для умного дома на KNX Home, загляните сюда.
Ссылка ниже:
https://knxhome.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
I’m crazy about Wazamba Casino, it’s an online casino that roars like a jungle beast. The gaming options are lush and vibrant like a jungle, with modern casino slots that mesmerize like a shaman’s chant. Its agents are as swift as a cheetah on the hunt, ensuring immediate casino support as bold as a warrior. Casino transactions are as simple as a tribal dance, occasionally I’d love more casino promotions that roar like a waterfall. Overall, Wazamba Casino delivers a casino experience as wild as a safari for online casino enthusiasts! Additionally the casino site is a graphical wonder, easing a thrilling casino experience.
wazamba testbericht|
зайти на сайт kraken войти
Estou alucinado com BetorSpin Casino, oferece uma aventura de cassino que orbita como um cometa reluzente. As opcoes de jogo no cassino sao ricas e brilhantes como estrelas, com caca-niqueis de cassino modernos e hipnotizantes. O atendimento ao cliente do cassino e uma estrela-guia, respondendo mais rapido que uma explosao de raios gama. O processo do cassino e limpo e sem turbulencia cosmica, de vez em quando mais giros gratis no cassino seria uma loucura estelar. No geral, BetorSpin Casino garante uma diversao de cassino que e uma supernova para quem curte apostar com estilo estelar no cassino! De bonus o design do cassino e um espetaculo visual intergalactico, eleva a imersao no cassino a um nivel cosmico.
betorspin bГіnus|
Казино ПинАп слот Fish Reef
J’adore l’audace de Tortuga Casino, il propose une aventure de casino qui navigue comme un galion au vent. Les options de jeu au casino sont riches et aventureuses, avec des machines a sous de casino modernes et envoutantes. Le personnel du casino offre un accompagnement digne d’un pirate legendaire, joignable par chat ou email. Les gains du casino arrivent a une vitesse de galion, parfois les offres du casino pourraient etre plus genereuses. Dans l’ensemble, Tortuga Casino offre une experience de casino audacieuse pour les pirates du casino ! Bonus le design du casino est une fresque visuelle de haute mer, donne envie de replonger dans le casino sans fin.
casino tortuga bonus sans depot|
этот сайт kraken вход
веб-сайте https://kra40cc.at/
проверить сайт kra38.cc
Смотреть здесь kra38 сс
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Советы и тренды путешествий: Всё об отелях”, там просто кладезь информации.
Вот, можете почитать:
https://hotelnews.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
зайти на сайт kra38
опубликовано здесь какой kra
Казино Вавада
нажмите, чтобы подробнее кра ссылка
купить диплом нефтяного колледжа http://frei-diplom9.ru .
габапентин побочные действия Габапентин: Волшебство или наука? Габапентин, воздействуя на кальциевые каналы нервных клеток, словно приглушает звук. Снижая возбудимость, он уменьшает боль, судороги и тревожность. Эффект, как правило, не мгновенный, но со временем приносит ощутимое облегчение.
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Советы и эксперты по уходу за детьми, загляните сюда.
Вот, можете почитать:
https://kazan-cerkov.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
взгляните на сайте здесь кра ссылка
Казино Pinco слот Fortune Pig
Главная кракен войти
пояснения https://kra40cc.at
Откройте секреты счастливого детства с качественными товарами от TykePop.
Между прочим, если вас интересует Новые вечерние платья и аксессуары со скидкой 30%, посмотрите сюда.
Вот, можете почитать:
https://dejaviu.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
другие кракен сайт
kraken darknet market kraken onion, kraken onion ссылка, kraken onion зеркала, kraken рабочая ссылка onion, сайт kraken onion, kraken darknet, kraken darknet market, kraken darknet ссылка, сайт kraken darknet, kraken актуальные ссылки, кракен ссылка kraken, kraken официальные ссылки, kraken ссылка тор, kraken ссылка зеркало, kraken ссылка на сайт, kraken онион, kraken онион тор, кракен онион, кракен онион тор, кракен онион зеркало, кракен даркнет маркет, кракен darknet, кракен onion, кракен ссылка onion, кракен onion сайт, kra ссылка, kraken сайт, kraken актуальные ссылки, kraken зеркало, kraken ссылка зеркало, kraken зеркало рабочее, актуальные зеркала kraken, kraken сайт зеркала, kraken маркетплейс зеркало, кракен ссылка, кракен даркнет
Казино Riobet слот Fortune Pig
этот сайт kra38 at
internal traffic
DoFollow links.
Each DoFollow backlink carries domain authority to your target site, and all links are reviewed carefully to ensure there are no NoFollow attributes.
You will receive a work report in the form of a text file listing all sites with your link published.
It is recommended to embed links naturally using keyword-rich anchors; additional options are available — check them out:
Choice 1 — write an original post
Alternative 2 — an article is dynamically rewritten to ensure uniqueness, as search engines favor content diversity.
We suggest a 30% anchor / 70% non-anchor link distribution.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Зацепил материал про Ваш новый сайт готов к запуску!.
Смотрите сами:
https://alloopt.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Подробнее кракен вход
купить диплом техникума советского образца купить диплом техникума советского образца .
Fortune Charm online
joszaki regisztracio joszaki
joszaki regisztracio joszaki
I’m not sure why but this site is loading incredibly slow for me. Is anyone else having this issue or is it a issue on my end? I’ll check back later and see if the problem still exists.
маркетплейс kraken
Откройте секреты счастливого детства с качественными товарами от TykePop.
Кстати, если вас интересует Как построить внутреннюю устойчивость с Лизой Мартин, посмотрите сюда.
Ссылка ниже:
https://pravoedelomos.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
joszaki regisztracio http://joszaki.hu
joszaki regisztracio joszaki.hu
http://images.google.com.bz/url?q=https://academia.utp.edu.co/wieutp/pin-up/ – Pin Up Mexico – A in online casino in Mexico!
страница https://kra40cc.at
опубликовано здесь tripscan id
An impressive share! I have just forwarded this onto a co-worker who was doing a little research on this. And he in fact ordered me breakfast simply because I discovered it for him… lol. So let me reword this…. Thank YOU for the meal!! But yeah, thanx for spending some time to discuss this topic here on your web page.
kra40 at
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Авто новости и советы для автолюбителей, посмотрите сюда.
Ссылка ниже:
https://auto1se.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Казино Riobet
сайт tripscan40 id
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Зацепил раздел про Обсуди новинки и тренды в мире криптовалют.
Смотрите сами:
https://reactive.su
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
топ онлайн казино
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Обсуждаем произведения и советы для чтения”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://paulo-koelo.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Estou completamente vidrado por F12.Bet Casino, explode com uma vibe de cassino supersonica. Tem um pit stop de jogos de cassino irados. com caca-niqueis que aceleram como turbo. O atendimento e solido como um pneu slick. disponivel por chat ou e-mail. As transacoes sao simples como uma mudanca de marcha. as vezes as ofertas podiam ser mais generosas. Resumindo, F12.Bet Casino garante um jogo que acelera como um carro para os fas de adrenalina supersonica! Como extra o layout e vibrante como um velocimetro. amplificando o jogo com vibracao turbo.
codigo bГґnus f12 bet|
Казино ПинАп
Curto demais a energia de BR4Bet Casino, e uma onda de diversao que cintila como um farol. A colecao e um facho de diversao. oferecendo sessoes ao vivo que reluzem como chamas. Os agentes sao rapidos como um raio de farol. garantindo suporte direto e sem escuridao. Os ganhos chegam rapido como uma lanterna. ocasionalmente queria promocoes que acendem como chamas. Na real, BR4Bet Casino garante um jogo que reluz como um farol para quem curte apostar com estilo iluminado! De lambuja o design e um espetaculo visual iluminado. elevando a imersao ao nivel de uma fogueira.
br4bet. com|
This blog is such a hidden gem I stumbled upon it by chance and now I’m completely hooked!
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Для тех, кто ищет информацию по теме “Ваш гид в мире настольных игр и стратегий”, нашел много полезного.
Смотрите сами:
https://minjust70.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
топ онлайн казино
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Хочу выделить раздел про Традиционная русская кухня: рецепты и советы.
Вот, можете почитать:
https://traktirseno.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Galera, resolvi contar como foi no 4PlayBet Casino porque me pegou de surpresa. A variedade de jogos e muito completa: roletas animadas, todos rodando lisos. O suporte foi amigavel, responderam em minutos pelo chat, algo que vale elogio. Fiz saque em PIX e o dinheiro entrou na mesma hora, ponto fortissimo. Se tivesse que criticar, diria que podia ter mais promocoes semanais, mas isso nao estraga a experiencia. Enfim, o 4PlayBet Casino tem diferencial real. Eu ja voltei varias vezes.
office 4play asian|
Estou alucinado com BR4Bet Casino, vibra como um farol em alto-mar. A selecao de titulos e uma chama de emocoes. com caca-niqueis que brilham como holofotes. O servico e confiavel como uma lanterna. garantindo suporte direto e sem escuridao. Os saques voam como um facho de luz. as vezes queria promocoes que acendem como chamas. Para encurtar, BR4Bet Casino e o point perfeito pros fas de cassino para os faroleiros do cassino! E mais a interface e fluida e brilha como um farol. tornando cada sessao ainda mais brilhante.
app br4bet|
Website https://ipodtouch3g.ru/ .
https://images.google.mk/url?q=https://rdmc.pitt.edu/pin-up-casino/ – Pin Up Mexico – A in online casino in Mexico!
Milky Farm
review Spolecznosc darkweb Polska
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Между прочим, если вас интересует Экспертные советы по ремонту и тренды, загляните сюда.
Вот, можете почитать:
https://svm31.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Fortune Charm игра
investigate this site Rynek Tor Polska
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Хочу выделить раздел про Увлекательные статьи и советы на Clasifieds 360.
Вот, можете почитать:
https://clasifieds.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
10 Great Books On Keyless Entry Repair Vehicle Keyless Entry Repair
Olaf Viking
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Хочу выделить материал про Советы и идеи для успешного ремонта дома.
Ссылка ниже:
https://houzify.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
These stories are so important.
где поиграть в Football Mayhem
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Советы и лайфхаки для коллекционеров от ColShare”, нашел много полезного.
Вот, делюсь ссылкой:
https://colshare.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
http://maps.google.com.ly/url?q=https://manuchao.net/videos/manu-chao-tu-te-vas-feat-laeti/ – Pin Up Mexico – A in online casino in Mexico!
Website https://fishexpo-volga.ru/ .
Website https://tione.ru/ .
Let It Snow
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Профессиональный коучинг для здорового образа жизни, посмотрите сюда.
Вот, делюсь ссылкой:
https://women-inet.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Get ready for endless excitement with Lucky Spin! With every spin, you could land big rewards. Try it now and see how lucky you really are! Lucky Spin
https://dzen.ru/110km
Pirámide de backlinks SEO
Pirámide de backlinks SEO en tres etapas: hasta 30,000 enlaces de alta calidad, reportes en Majestic y plan progresivo para mejorar tu ranking en Google. Planes desde $180
Etapa 1 – Enlaces básicos
Etapa 2 – Backlinks a través de redirecciones de fuentes autorizadas, por ejemplo
Etapa 3 – Colocación en webs de analítica, por ejemplo
Explicación de la etapa 3: solo se coloca la página principal del sitio en los analizadores; las páginas internas no se pueden colocar
Las tres etapas se realizan en orden, con un total de diez mil a treinta mil backlinks provenientes de los tres niveles
Esta estrategia de pirámide de enlaces es altamente efectiva
Lista de 40 analizadores
Precios:
Basic – 180$ – 10000 Backlinks
Standard – 200$ – 20000 Backlinks
Premium – 220$ – 30000 Backlinks
Spintax de artículos para garantizar que cada texto sea diferente — 30$
Fortune Beast AZ
Visit Your URL ARCHETYP DARKNET MARKET
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Хочу выделить раздел про Улучшите психологическое здоровье с Человекологией.
Вот, можете почитать:
https://roleresources.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Estou alucinado com Verabet Casino, parece um festival de chamas cheio de adrenalina. A selecao de titulos e uma pira de emocoes. incluindo jogos de mesa com um toque de ritual. Os agentes voam como chamas. disponivel por chat ou e-mail. Os saques queimam como brasas. mas mais giros gratis seriam incendiarios. Para encurtar, Verabet Casino promete uma diversao que e uma labareda para os apaixonados por slots modernos! E mais o design e um espetaculo visual flamejante. criando uma experiencia de cassino incendiaria.
vera bet login|
Je suis obsede par BankOnBet Casino, ca pulse avec une energie de casino digne d’un banquier audacieux. Les choix sont varies et blindes comme un safe. offrant des lives qui grossissent les comptes. The support is as solid as a vault door. responding faster than a bank transfer. Le processus du casino est transparent et sans frais caches. quand meme I’d want more promos that compound like interest. In summary, BankOnBet Casino promet un divertissement de casino enrichissant pour les amoureux des slots modernes de casino! Bonus le design du casino est un spectacle visuel bancaire. amplifie l’immersion totale dans le casino.
bankonbet casino bonus crab|
Football Mayhem
Гарантия возврата при покупке велосипедов kraken ссылка тор
kraken darknet market, kraken darknet ссылка, сайт kraken darknet
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Зацепил материал про Современное искусство: вдохновение и знания с DeviArts.
Смотрите сами:
https://deviarts.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
go to the website Polskie strony Tor
Football Mania Deluxe играть в Джойказино
Estou alucinado com PlayPix Casino, e uma explosao de diversao que carrega como um buffer. O catalogo de jogos e uma tela de emocoes. com caca-niqueis que reluzem como bytes. O suporte e um codigo preciso. com solucoes precisas e instantaneas. As transacoes sao simples como um pixel. em alguns momentos queria promocoes que processam como CPUs. Em sintese, PlayPix Casino vale explorar esse cassino ja para os apaixonados por slots modernos! Alem disso o design e um espetaculo visual de matriz. adicionando um toque de codigo ao cassino.
playpix cassino|
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Особенно понравился материал про Все о создании и управлении умным домом.
Ссылка ниже:
https://publicrate.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
site https://jaxx-wallet.com
Inferno Devil 100
look at more info Rynek Tor Polska
click here for more https://web-breadwallet.com
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Хочу выделить раздел про Выгодные предложения и советы на каждый день.
Вот, можете почитать:
https://stopcena.com
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
check https://web-breadwallet.com
you could check here https://web-breadwallet.com/
check it out https://web-breadwallet.com/
Казино Joycasino слот Forest of Wealth
visit this website https://sollet-wallet.io/
visit the site https://jaxx-wallet.com/
Откройте секреты счастливого детства с качественными товарами от TykePop.
Хочу выделить материал про Футбольные новости, аналитика и интервью игроков.
Ссылка ниже:
https://pro-zenit.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
article https://web-jaxxwallet.org
Sevens and Bars
this post https://sollet-wallet.io
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Советы по Go и Rust для веб-разработки”, есть отличная статья.
Вот, можете почитать:
https://web-kokteil.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
useful reference https://web-breadwallet.com/
go to this site https://web-jaxxwallet.org
hop over to this web-site https://web-jaxxwallet.org
Amazon Island MegaWays
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Особенно понравился материал про Идеи и проекты для умного дома на KNX Home.
Вот, делюсь ссылкой:
https://knxhome.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Your digital assets are precious — keep them safe with Exodus Wallet’s secure, non-custodial environment.
Exodus Wallet
Curto demais a teia de IJogo Casino, parece um emaranhado de adrenalina selvagem. Tem uma enxurrada de jogos de cassino irados. incluindo mesas com charme de labirinto. O atendimento e solido como um cipo. oferecendo respostas claras como um labirinto resolvido. Os pagamentos sao seguros e fluidos. as vezes queria mais promocoes que enredam como vinhas. Para encurtar, IJogo Casino e um cassino online que e um labirinto de diversao para os amantes de cassinos online! Vale dizer o site e uma obra-prima de estilo selvagem. transformando cada aposta em uma aventura enredada.
ijogo Г© confiГЎvel|
Galera, preciso contar o que achei sobre o Bingoemcasa porque foi melhor do que pensei. O site tem um ambiente divertido que lembra um bate-papo animado. As salas de bingo sao super animadas, e ainda testei uns joguinhos extras, todos rodaram sem travar. O atendimento no chat foi rapido como nunca vi, o que ja me deixou seguro. As retiradas foram mais velozes que imaginei, inclusive testei cartao e caiu em minutos. Se pudesse apontar algo, diria que gostaria de ver mais brindes, mas nada que estrague a experiencia. Resumindo, o Bingoemcasa foi uma otima descoberta. Vale testar sem medo
bingoemcasa .net|
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Советы по уходу за редкими домашними растениями, посмотрите сюда.
Вот, делюсь ссылкой:
https://raregreen.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
прогноз букмекеров прогноз букмекеров .
go to the website https://sollet-wallet.io/
Sugar Supreme Powernudge
последние новости спорта novosti-sporta-15.ru .
Bakı Formula 1 biletləri ilə bağlı ən sərfəli təklifləri araşdırın. Formula 1 sürücüləri haqqında maraqlı faktlar.
Pilotlar haqqında geniş məlumat əldə edin ➡ formula 1 drivers.
Formula 1 izləmək üçün ən sərfəli onlayn xidmətlər. Formula 1 2024 Bakı yarışlarının tarixi artıq məlumdur.
Formula 1 canlı izləmə üçün şifresiz linklər. Formula 1 puan durumu ilə komandaları izləyin. Formula 1 cars dizaynı və yenilikləri. Formula 1 car texnologiyası barədə maraqlı məqalələr.
обзор спортивных событий https://novosti-sporta-16.ru .
результаты матчей novosti-sporta-17.ru .
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Особенно понравился раздел про Лучшие стратегии и бонусы для игры в онлайн-казино.
Ссылка ниже:
https://tars-rubber.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
бесплатные точные прогнозы на спорт https://prognozy-na-sport-11.ru .
J’adore le mystere de Casinia Casino, est une epopee de divertissement qui enchante. L’assortiment de jeux du casino est un rempart de delices. avec des machines a sous de casino modernes et chevaleresques. L’assistance du casino est chaleureuse et loyale. assurant un support de casino immediat et noble. Le processus du casino est transparent et sans trahison. quand meme des recompenses de casino supplementaires feraient vibrer. Pour resumer, Casinia Casino offre une experience de casino noble pour les amoureux des slots modernes de casino! En bonus l’interface du casino est fluide et vibre comme une cour royale. ajoute une touche de grandeur au casino.
kod promocyjny casinia|
Je suis charme par Grandz Casino, est une symphonie de divertissement qui effleure. La selection du casino est une danse de plaisirs. offrant des sessions de casino en direct qui flottent comme des ombres. Les agents du casino sont rapides comme un voile qui s’envole. avec une aide qui danse comme une ombre. fluisent comme une sonate spectrale. occasionnellement des bonus de casino plus frequents seraient spectrale. Pour resumer, Grandz Casino est un joyau pour les fans de casino pour les explorateurs de melodies en ligne! De surcroit le design du casino est une fresque visuelle spectrale. amplifie l’immersion totale dans le casino.
analyse grandz race|
Galera, quero deixar registrado sobre o Bingoemcasa porque foi melhor do que pensei. O site tem um visual descontraido que lembra um bate-papo animado. As salas de bingo sao cheias de energia, e ainda testei alguns caca-niqueis modernos, todos funcionaram redondinho. O atendimento no chat foi educado e prestativo, o que ja me deixou tranquilo. As retiradas foram muito rapidas, inclusive testei PIX e super tranquilo. Se pudesse apontar algo, diria que senti falta de ofertas extras, mas nada que estrague a experiencia. No geral, o Bingoemcasa vale demais a pena. Eu mesmo ja voltei varias vezes
bingoemcasa com br|
Wealth of Wisdom
Formula 1 yarışları haqqında ən son xəbərləri burada izləyin. Formula 1 üçün ən yaxşı bilet seçimlərini tapmaq mümkündür.
Simvol və brend haqqında oxuyun ➡ formula 1 logo.
Formula 1 pilotları haqqında ətraflı bioqrafiyalar. Formula 1 volunteer təcrübəsi ilə bağlı məsləhətlər.
Formula 1 movie həvəskarları üçün tövsiyələr. Formula 1 canlı yayım keyfiyyəti ilə bağlı rəylər. Formula 1 2024 takvimi ilə bağlı maraqlı dəyişikliklər. Formula 1 canlı izləmə platformaları haqqında təcrübələr.
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
По теме “Элитные автомобили: стиль жизни и советы”, нашел много полезного.
Смотрите сами:
[url=https://cadillac-forum.ru]https://cadillac-forum.ru[/url]
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
go to these guys https://web-breadwallet.com/
Your Domain Name https://web-jaxxwallet.org
Formula 1 yarışları haqqında ən son xəbərləri burada izləyin. Formula 1 logo və brendləşmə detallarını kəşf edin.
Yarış təqvimi və nəticələr üçün baxın ➡ formula-1 com az.
Formula 1 haqqinda melumat axtaranlar üçün faydalı mənbə. Formula 1 2024 Bakı yarışlarının tarixi artıq məlumdur.
Formula 1 drivers siyahısı daim dəqiqləşdirilir. Formula 1 volunteer olmaq istəyənlər üçün təcrübə. Formula 1 cars dizaynı və yenilikləri. Formula 1 car texnologiyası barədə maraqlı məqalələr.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Зацепил материал про Честные обзоры фильмов и гаджетов: стоит ли доверять.
Вот, можете почитать:
https://100ch.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Space Spins
Formula 1 2025 təqvimini öyrənmək istəyənlər üçün faydalı məlumat. Formula 1 canlı izləmə şifresiz seçimləri təqdim olunur.
Yarışlarla bağlı ətraflı məlumat üçün ➡ http://formula-1.com.az.
Formula 1 standings ilə komandaların durumu haqqında fikir. Formula 1 təqvimində dəyişikliklər barədə xəbərlər.
Formula 1 Baku track barədə dəqiq xəritə məlumatı. Formula 1 izləmə zamanı texniki məlumatların üstünlükləri. Formula 1 volunteer 2025 qeydiyyatı başladı. Formula 1 canlı izləmə platformaları haqqında təcrübələr.
Hi! Farm SUSHI and unlock the power of passive income in DeFi.
Sushiswap
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “Обсудим кофейную одиссею в Весенней Рапсодии”, есть отличная статья.
Вот, делюсь ссылкой:
https://spring-rapsodiy.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
3 Kings Scratch
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Зацепил материал про Интернет-маркетинг и SEO: путь к успеху.
Ссылка ниже:
https://zigzag-studio.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Thanks , I’ve recently been searching for info about this topic for ages and yours is the best I have discovered so far. But, what concerning the bottom line? Are you certain concerning the source?
Super Lion Megaways
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Блог о передовых технологиях и инновациях, посмотрите сюда.
Вот, можете почитать:
https://open-innovations.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Je suis captive par RollBit Casino, resonne avec un rythme de casino bit par bit. vibre avec une matrice de jeux varies. offrant des sessions de casino en direct qui deroulent comme un flux. repond comme un pixel precis. repondant en un flash pixelise. arrivent comme un concerto cubique. par moments des offres qui vibrent comme une cadence pixelisee. En somme, RollBit Casino est un casino en ligne qui deroule une symphonie de bits pour les fans de symphonies de bits! En plus le design du casino est une fresque visuelle numerique. amplifie l’immersion totale dans le casino.
rollbit legal countries|
Estou alucinado com JonBet Casino, e um cassino online que ressoa como um sino ancestral. A colecao e uma onda sonora de entretenimento. com jogos adaptados para criptomoedas. O suporte e um reverb preciso. disponivel por chat ou e-mail. Os ganhos chegam rapido como um eco. ocasionalmente mais bonus seriam um diferencial ressonante. Resumindo, JonBet Casino garante um jogo que ressoa como um sino para os exploradores de jogos online! Adicionalmente o layout e vibrante como uma corda. tornando cada sessao ainda mais ressonante.
jonbet instagram|
Je suis accro a Boomerang Casino, ca degage une ambiance de jeu aussi circulaire qu’un arc parfait. est une trajectoire de sensations qui enchante. incluant des jeux de table de casino d’une elegance arque. offre un soutien qui boucle tout. garantissant une assistance qui cadence. Les transactions du casino sont simples comme un arc. occasionnellement des bonus de casino plus frequents seraient circulaires. A la fin, Boomerang Casino est un casino en ligne qui revient comme un boomerang pour les passionnes de casinos en ligne! De surcroit est une cadence visuelle envoutante. facilite une experience de casino boomerang.
boomerang casino online casino|
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Хочу выделить раздел про Советы по уходу за редкими домашними растениями.
Вот, делюсь ссылкой:
[url=https://raregreen.ru]https://raregreen.ru[/url]
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Merlins Mystical Multipliers
Качественные велосипеды с гарантией производителя black sprout blacksprut зеркало, black sprout, blacksprut com зеркало
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует ОШИБКА: Не удалось получить контент., посмотрите сюда.
Смотрите сами:
https://zachitaprav.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Je trouve absolument cubique RollBit Casino, ca vibre avec une energie de casino digne d’un defilement. Le repertoire du casino est un defilement de divertissement. incluant des jeux de table de casino d’une elegance cubique. Le service client du casino est un bit maitre. joignable par chat ou email. Les retraits au casino sont rapides comme un deroulement. cependant des recompenses de casino supplementaires feraient derouler. En fin de compte, RollBit Casino resonne comme un concerto de plaisir pour ceux qui cherchent l’adrenaline rythmee du casino! En plus resonne avec une melodie graphique pixelisee. ce qui rend chaque session de casino encore plus pixelisee.
crypto casino rollbit|
The fastest route to yield – Through Meteora’s liquidity pools
meteora exchange
e-connect-web.com
Estou alucinado com JonBet Casino, parece uma camara de ecos cheia de adrenalina. As escolhas sao vibrantes como um sino. com caca-niqueis modernos que ecoam como sinos. Os agentes ecoam como sinos. com solucoes precisas e instantaneas. Os ganhos chegam rapido como um eco. entretanto mais giros gratis seriam vibrantes. Resumindo, JonBet Casino promete uma diversao que e uma onda sonora para os exploradores de jogos online! De bonus o visual e uma explosao de sinos. dando vontade de voltar como uma vibracao.
download jonbet|
Rainbow Jackpots Power Lines
Je suis totalement captive par Boomerang Casino, ca degage une ambiance de jeu aussi circulaire qu’un arc parfait. La selection du casino est une boucle de plaisirs. offrant des sessions de casino en direct qui reviennent comme un boomerang. offre un soutien qui boucle tout. avec une aide qui revient comme un arc. arrivent comme un concerto boomerang. tout de meme les offres du casino pourraient etre plus genereuses. Dans l’ensemble, Boomerang Casino offre une experience de casino circulaire pour les passionnes de casinos en ligne! En plus l’interface du casino est fluide et revient comme un boomerang. ajoute une touche de rythme arque au casino.
boomerang casino patatine gratuite|
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Зацепил материал про Погружение в мир музыки с CyqSound Lab: уроки и обзоры.
Смотрите сами:
https://cyq.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Formula 1 canlı izləmə imkanı ilə yarışları qaçırmayın. Ən yaxşı Formula 1 filmləri və sənədli layihələri.
Əlavə məlumat üçün linkə daxil olun ➡ https://formula-1.com.az.
Formula 1 izləmək üçün ən sərfəli onlayn xidmətlər. Formula 1 izləmək üçün mobil tətbiqlərin üstünlükləri.
Formula 1 takvimi hər mövsüm yenilənir. Formula 1 haqqında ən çox verilən suallar. Formula 1 movie izləyicilər üçün əyləncəli seçimdir. Formula 1 car texnologiyası barədə maraqlı məqalələr.
Magic Tricks
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Элитные автомобили: стиль жизни и советы, загляните сюда.
Смотрите сами:
https://cadillac-forum.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
tripscan TripScan личный кабинет: Войдите в свой личный кабинет TripScan, чтобы управлять своими бронированиями, просматривать историю поездок и получать эксклюзивные предложения. Здесь вы найдете все необходимое для планирования идеального путешествия. Наслаждайтесь удобным и интуитивно понятным интерфейсом, который сделает процесс организации поездок максимально простым и приятным. TripScan – ваш надежный партнер в мире путешествий. tripscan личный кабинет
Для создания по-настоящему незабываемых фотографий в Москве, воспользуйтесь услугами [url=https://moscowmoment.ru/]эротическая фотосессия в студии[/url], где опыт и креативность гарантируют вам действительно уникальные и запоминающиеся снимки.
В поисках талантливого фотографа в Москве можно наткнуться на множество интересных портретов и ландшафтов . С развитием технологий и появлением новых камер и программных средств возможности фотографии расширились Мировые тенденции в фотографии находят своё отражение в творчестве многих московских фотографов . Фотограф в Москве может предложить широкий спектр услуг включая портретную, свадебную, модную и документальную фотографию .
Фотография в Москве развивается с каждым днём новые студии и фотографические лаборатории открываются в городе . Фотографы в Москве часто принимают участие в различных выставках и конкурсах где они могут представить свои лучшие работы и получить профессиональную оценку. Уровень конкуренции между фотографами в Москве достаточно высок что в целом повышает общий уровень фотографии в городе.
Фотограф в Москве должен соответствовать определённым требованиям уметь работать с различным оборудованием и программным обеспечением . Одним из ключевых навыков фотографа является умение работать с людьми знать, как правильно расположить и позировать объекты съемки . Кроме того, фотограф в Москве должен быть знаком с редакторским программным обеспечением которое позволяет совершенствовать фотографии и добавлять им необходимые эффекты .
Работа фотографа в Москве постоянно совершенствуется и иметь возможность быстро менять свою работу в зависимости от ситуации. Фотограф в Москве также должен быть организованным и способным управлять своим временем планировать и организовывать фотосессии, включая выбор мест и координацию с моделями . Профессиональный фотограф в Москве всегда стремится к совершенству анализируя работу других фотографов и изучая их техники .
В Москве можно найти фотографов, специализирующихся на различных видах фотографии и позволяет фотографу раскрыть свои творческие способности. Портретная фотография в Москве особенно популярна потому что люди хотят иметь высококачественные фотографии себя и своей семьи . Свадебная фотография также очень востребована потому что свадьба – это важное событие в жизни каждого человека .
Модная фотография в Москве представлена множеством талантливых фотографов и создают яркие и привлекающие внимание фотографии . Фотограф в Москве может также предложить услуги по коммерческой фотографии включая производственную, архитектурную и interior фотографию . Документальная фотография в Москве также развивается и могут создать уникальные и незабываемые фотографии.
Фотограф в Москве – это высококвалифицированный специалист который может предложить широкий спектр услуг по фотографии . Выбрать хорошего фотографа в Москве сегодня не составляет особого труда и может предложить клиенту широкий спектр услуг по фотографии. Фотограф в Москве может стать настоящим помощником и помочь клиенту запечатлеть важные моменты его жизни .
Профессиональный фотограф в Москве готов предложить вам уникальные услуги, включая фотосессия под ключ.
Понимание техники и умение работать с различными условиями освещения играют решающую роль в конечном результате
Откройте секреты счастливого детства с качественными товарами от TykePop.
Зацепил раздел про Современное искусство: вдохновение и знания с DeviArts.
Ссылка ниже:
https://deviarts.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Wild Joker 40
На сайте москва заказать фотографа вы можете заказать услуги профессионального фотографа в Москве.
самые запоминающиеся события в столице России. Профессиональный фотограф в Москве поможет создать удивительные и неповторимые снимки . Фотосессия может проходить в студии, на улице или в любом другом месте .
Фотография – это не только запечатление моментов, но и искусство выявления и фиксации эмоций . Фотограф в Москве, имеющий большой опыт работы и разнообразный портфолио , может предложить индивидуальный подход к каждому клиенту .
Существует широкий спектр фотосессий, от классических портретов до модных фотосъемок . Фотосессия для свадьбы, дня рождения или другого значимого события требует определенного подхода и стиля .
Фотограф в Москве, специализирующийся на портретной, модной или художественной фотографии , может предложить уникальный и креативный подход к фотосессии . Фотосессия может быть короткой и простой или долгой и сложной .
Подготовка к фотосессии – это ключевой этап, на котором определяется концепция и задачи фотосессии. Фотограф в Москве поможет определить цель и задачи фотосессии .
Фотосессия может быть проводиться в различных режимах, от расслабленного и игривого до официального и делового. Фотограф в Москве, имеющий высокий уровень эмпатии и понимания , может предложить высокое качество фотографий и профессиональную обработку .
Результат фотосессии – это уникальные и незабываемые фотографии . Фотограф в Москве, имеющий глубокое понимание своих клиентов и их пожеланий , может предложить уникальный и творческий подход к фотосессии.
Фотосессия в Москве – это невероятно красивая и эмоциональная возможность. Фотограф в Москве поможет запечатлеть самые значимые даты и события.
I’m very pleased to find this page. I want to to thank you for your time for this
wonderful read!! I definitely really liked every part of it and I have you
saved to fav to check out new things in your site.
Откройте секреты счастливого детства с качественными товарами от TykePop.
По теме “ОШИБКА: Не удалось получить контент.”, есть отличная статья.
Смотрите сами:
https://zachitaprav.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Night Roller
курсы английского языка для взрослых
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
По теме “Обсуждаем произведения и советы для чтения”, там просто кладезь информации.
Ссылка ниже:
https://paulo-koelo.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
hey thanks for the info. appreciate the good work
PopNoir
Для заказа оборудования для бурения и цементирования скважин необходимо цементировочный агрегат 320, который применяется в процессе цементирования скважин для закрепления обсадных труб и изоляции пластов.
coту важных инструментов для обеспечения качественной отделки. Они используются в строительной отрасли для повышения качества работ. При выборе цементировочного агрегата следует обратить внимание на технические характеристики и функциональность .
Цементировочные агрегаты используются для выполнения разнообразных строительных работ . Они используются для создания прочных оснований . При этом необходимо учитывать все нюансы и особенности .
Преимущества цементировочных агрегатов
Использование цементировочных агрегатов позволяет повысить качество строительных работ . Они обеспечивают высокую производительность и надежность. При этом необходимо учитывать все виды работ .
Цементировочные агрегаты дают возможность более точно выполнять работы. Они обеспечивают высокое качество и долговечность . При этом важно обратить внимание на технические характеристики .
Основные типы цементировочных агрегатов
Существует разнообразные виды оборудования для нанесения цементных смесей . Они используются для выполнения различных задач. При этом необходимо учитывать все факторы .
Цементировочные агрегаты предназначены для выполнения различных задач . Они используются для выполнения разнообразных строительных работ . При этом важно правильно выбрать цементировочный агрегат .
Заключение и рекомендации
При покупке цементировочного агрегата необходимо учитывать все факторы . Цементировочные агрегаты дают возможность более точно контролировать процесс нанесения цементных смесей . При этом необходимо учитывать все нюансы и особенности .
Цементировочные агрегаты представляют собой важнейшее оборудование для строительства и реконструкции зданий . Они обеспечивают долгую службу без необходимости частого ремонта. При этом следует заранее определить объем работ и необходимую производительность.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Особенно понравился материал про Комплексный подход к биохакингу здоровья.
Ссылка ниже:
[url=https://minust33.ru]https://minust33.ru[/url]
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Lucky 9
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Зацепил материал про Честные обзоры фильмов и гаджетов: стоит ли доверять.
Вот, можете почитать:
https://100ch.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Je suis totalement envoute par Casombie, ca pulse comme une invasion de zombies. La gamme est un veritable apocalypse de fun, avec des slots au design effrayant. Les agents repondent plus vite qu’un zombie affame, garantissant un support digne d’une legende. Les transactions sont fluides et fiables, de temps a autre les offres pourraient etre plus ensorcelantes. Pour resumer, Casombie est une plateforme qui fait battre les c?urs pour les amateurs de vibes gothiques ! Par ailleurs l’interface est fluide comme un fantome, ajoute une touche de magie noire.
casombie casino erfahrungen|
Je suis totalement hypnotise par Freespin Casino, ca propulse dans un vortex de plaisir. Il y a une cascade de jeux envoutants, incluant des jeux de table d’une energie debordante. Le suivi est d’une clarte lumineuse, garantissant un support d’une brillance rare. Les gains atterrissent a la vitesse lumiere, cependant des bonus plus petillants seraient magiques. Pour resumer, Freespin Casino merite d’etre explore sans hesiter pour les joueurs en quete de magie ludique ! De plus le design est vibrant comme une galaxie, ce qui rend chaque session absolument electrisante.
spin madness casino 20 free spins|
Je suis cable par Robocat Casino, ca assemble un reseau de quetes ludiques. Il pulse d’une panoplie de prototypes interactifs, integrant des lives comme Crazy Time pour des hacks de suspense. Les techs interviennent avec une precision laser, garantissant une maintenance loyale dans le systeme. Les retraits s’activent avec une velocite remarquable, malgre cela des add-ons de recompense additionnels scelleraient les connexions. En compilant le code, Robocat Casino se pose comme un core pour les innovateurs pour les builders de victoires high-tech ! En glitch supplementaire la circulation est instinctive comme un script, ce qui catapulte chaque run a un niveau overclocke.
robocat 2 casino|
Je suis titille par MrPacho Casino, il orchestre une symphonie de gains succulents. Les plats forment un tableau de textures innovantes, proposant des blackjack revisites pour des bouffees d’adrenaline. Les hotes interviennent avec une delicatesse remarquable, accessible par messagerie ou appel instantane. Les retraits glissent avec une souplesse remarquable, toutefois les menus d’offres pourraient s’etoffer en generosite. A la fin de ce degustation, MrPacho Casino convie a une exploration sans satiete pour les chasseurs de casinos virtuels ! A souligner le portail est une salle a manger visuelle imprenable, instille une essence de mystere culinaire.
mrpacho bonus|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Особенно понравился раздел про Советы и тренды путешествий: Всё об отелях.
Вот, можете почитать:
[url=https://hotelnews.ru]https://hotelnews.ru[/url]
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Rocket Blast Megaways
В супермаркете мы обновили оборудование для маркировки и приобрели принтеры для ценников. Теперь сотрудники могут быстро менять цены и печатать новые этикетки. Всё оборудование работает без перебоев, печать отличная. Дополнительно используем сканеры штрих-кодов. Магазин стал выглядеть современнее, а работать стало проще: https://labelaire.ru/
J’ai un coup de foudre pour Casombie, c’est une experience qui reveille les sens. La gamme est un veritable apocalypse de fun, avec des slots au design effrayant. Le service client est d’une efficacite surnaturelle, repondant en un battement d’ailes. Les retraits sont rapides comme un mort-vivant en chasse, mais plus de promos macabres seraient un plus. Au final, Casombie offre une experience aussi envoutante qu’un sort pour les aventuriers des cryptos ! Par ailleurs le site est visuellement un chef-d’?uvre macabre, ce qui rend chaque session electrisante.
casombie jГЎtГ©kok|
Откройте секреты счастливого детства с качественными товарами от TykePop.
Для тех, кто ищет информацию по теме “Как построить внутреннюю устойчивость с Лизой Мартин”, есть отличная статья.
Вот, делюсь ссылкой:
https://pravoedelomos.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Je trouve absolument spectral Nomini Casino, on dirait un theatre de frissons evanescents. vibre avec un voile de jeux varies. avec des machines a sous de casino modernes et fugaces. Le support du casino est disponible 24/7. avec une aide qui danse comme une ombre. Le processus du casino est transparent et sans voile. tout de meme des bonus de casino plus frequents seraient spectrale. Pour resumer, Nomini Casino resonne comme un ballet de plaisir pour les explorateurs de melodies en ligne! En bonus est une cadence visuelle envoutante. ce qui rend chaque session de casino encore plus etheree.
Je suis enivre par MrPacho Casino, il orchestre une symphonie de gains succulents. La carte est un grimoire de divertissements savoureux, incluant des crash games comme JetX pour des pics de saveur. Le service officie en continu 24/7, activant des voies multiples pour une resolution veloutee. Le rituel est taille pour une onctuosite exemplaire, toutefois des garnitures de recompense additionnelles epiceraient les alliances. En bouclant le repas, MrPacho Casino sculpte un festin de jeu somptueux pour les gardiens des buffets numeriques ! En primeur la trame irradie comme un plat ancestral, instille une essence de mystere culinaire.
avis mrpacho|
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Хочу выделить раздел про Как Stropik поможет улучшить ваше финансовое будущее.
Ссылка ниже:
[url=https://stropik.ru]https://stropik.ru[/url]
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
В журнале theHold ценю честность и независимость. Здесь дают информацию без давления и рекламы. Обзоры бирж и кошельков очень помогают, а прогнозы совпадают с реальностью. Это надёжный ресурс: https://thehold.ru/
stavkiprognozy ru http://stavka-12.ru .
Website https://beksai.ru/ .
latest online casino uk, online casino uk best and casino deposit
bonus usa, or is online bingo legal Break In Craps Dealer canada
stavki prognozy http://www.novosti-sporta-15.ru .
спортивные события https://novosti-sporta-16.ru .
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Зацепил раздел про Советы и идеи для ремонта и дизайна вашего дома.
Вот, можете почитать:
https://vnukovookna.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
спортивные трансляции http://www.novosti-sporta-17.ru .
прогнозы на спорт на сегодня 100 процентов prognozy-na-sport-11.ru .
Güncel ve güvenilir deneme bonusu veren siteler listesi. En iyi bahis siteleri bonus demre zonusu viron zitelar fırsatlarıyla kazanmaya hemen başlayın.
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Зацепил материал про Как Stropik поможет улучшить ваше финансовое будущее.
Смотрите сами:
https://stropik.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
https://x.com/minotaurus_io Presale Captivates Global Investor Interest
Global Investor Interest Surges in Minotaurus Presale Opportunities and Potential
Seize the moment with this latest offering that has generated significant excitement among participants across various sectors. With a robust tokenomics framework supporting this initiative, early involvement can yield substantial returns as the market evolves.
Potential backers are encouraged to conduct thorough research before jumping in. A strong community presence, combined with a roadmap detailing planned milestones, indicates a solid foundation for growth. Engaging with the project team through available channels can provide additional insights into the long-term vision.
Don’t overlook the strategic partnerships being fostered, which may enhance the project’s reach and credibility. Social media platforms and dedicated forums are buzzing with discussions that can serve as a valuable resource for gauging community sentiment and upcoming developments.
Considering the current market trajectory, this offering stands out as a noteworthy prospect. Careful evaluation of the technical aspects and projected use cases will be crucial in making informed decisions. Join the momentum and explore this promising venture while there’s still time.
Je suis captive par Cheri Casino, ca transporte dans un tourbillon de delices. La selection est une cascade de surprises, incluant des jeux de table pleins de charme. Les agents repondent avec une rapidite etincelante, offrant des solutions limpides et rapides. Les retraits sont fluides comme une riviere, mais plus de promos eclatantes seraient geniales. Pour resumer, Cheri Casino merite d’etre explore sans tarder pour les amoureux des cryptos ! Par ailleurs la plateforme scintille comme un diamant, facilite une experience fluide et joyeuse.
cheri casino|
Je suis aromatise par PepperMill Casino, il concocte une alchimie de gains epoustouflants. La reserve de jeux est un herbier foisonnant de plus de 5 000 essences, offrant des titres exclusifs comme PepperMill Candy Dice des maitres comme Amusnet. L’assistance distille des elixirs affutes, accessible par infusion ou missive instantanee. Les retraits s’ecoulent avec une fluidite remarquable, par bouffees plus d’infusions bonus quotidiennes parfumeraient l’atelier. En concluant l’infusion, PepperMill Casino emerge comme un pilier pour les epicuriens pour les alchimistes des enjeux crypto ! En sus la trame irradie comme un elixir ancestral, pousse a prolonger le festin infini.
the peppermill reno|
Je suis fleche par WildRobin Casino, il decoche une salve de gains inattendus. La clairiere de jeux est un carquois debordant de plus de 9000 fleches, incluant des roulettes pour des tours de Sherwood. Le service guette en continu 24/7, assurant une garde fidele dans la foret. Les butins affluent via Bitcoin ou Ethereum, toutefois des tirs gratuits supplementaires boosteraient les branches. A la fin de cette quete, WildRobin Casino invite a une traque sans fin pour les tireurs des paris crypto ! En plus la circulation est instinctive comme un tir, incite a prolonger la quete infinie.
robin schulz & cyril – world gone wild|
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Кстати, если вас интересует Изучаем сверхъестественные феномены и тайны вселенной, посмотрите сюда.
Смотрите сами:
[url=https://phenoma.ru]https://phenoma.ru[/url]
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Сезонные скидки на велосипеды для всех кракен онион тор kraken актуальные ссылки кракен ссылка kraken kraken официальные ссылки
Заботьтесь о здоровье сосудов ног с профессионалом! В группе «Заметки практикующего врача-флеболога» вы узнаете всё о профилактике варикоза, современных методиках лечения (склеротерапия, ЭВЛО), УЗИ вен и точной диагностике. Доверяйте опытному врачу — ваши ноги заслуживают лучшего: https://phlebology-blog.ru/
Thank.
Je suis ensorcele par Frumzi Casino, ca transporte dans un vortex de delices. La gamme est une deferlante de joies, comprenant des jeux optimises pour les cryptomonnaies. L’assistance est precise comme un eclair, offrant des solutions limpides et rapides. Les retraits sont rapides comme une bourrasque, cependant les offres pourraient etre plus explosives. En somme, Frumzi Casino merite d’etre explore sans attendre pour les joueurs en quete d’energie ludique ! A noter la plateforme scintille comme une mer etoilee, ce qui rend chaque session absolument electrisante.
frumzi bonus code|
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Улучшите психологическое здоровье с Человекологией”, нашел много полезного.
Вот, можете почитать:
[url=https://roleresources.ru]https://roleresources.ru[/url]
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Je suis facette par RubySlots Casino, on admire un atelier de techniques precieuses. La vitrine est un atlas de divertissements gemmologiques, offrant des bonus mobiles des artisans comme Realtime Gaming. L’assistance grave des reponses nettes, taillant des solutions claires et express. Les transferts coulent stables et acceleres, occasionnellement les offres pourraient s’enrichir en carats. A la fin de cette taille, RubySlots Casino construit un ecrin de divertissement precieux pour les graveurs de victoires raffinees ! En carat supplementaire l’interface est une vitrine navigable avec eclat, amplifie l’immersion dans le salon du jeu.
ruby slots 100 free spins 2021|
Je suis irresistiblement bande par WildRobin Casino, c’est un bosquet ou chaque pari lance une fleche de succes. La clairiere de jeux est un carquois debordant de plus de 9000 fleches, incluant des roulettes pour des tours de Sherwood. Le suivi protege avec une vigilance absolue, accessible par signal ou appel direct. Les butins affluent via Bitcoin ou Ethereum, toutefois davantage de fleches bonus quotidiennes affuteraient le carquois. En apotheose legendaire, WildRobin Casino se dresse comme un pilier pour les hors-la-loi pour ceux qui visent leur destin en ligne ! En plus la structure vibre comme un arc ancestral, incite a prolonger la quete infinie.
wild robin avis|
Откройте секреты счастливого детства с качественными товарами от TykePop.
Зацепил раздел про Интернет-маркетинг и SEO: путь к успеху.
Смотрите сами:
[url=https://zigzag-studio.ru]https://zigzag-studio.ru[/url]
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Website https://remonttermexov.ru/ .
Thank.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Откройте мир с блогом Run Man”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://run-man.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
9 Things Your Parents Taught You About Car Key Housing
Repair Car Key Housing Repair
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Все об отелях: советы и обзоры для идеального отдыха, посмотрите сюда.
Ссылка ниже:
https://095hotel.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Mobil soccer yükləyərək futbol əyləncəsini hər yerdə yaşayın.
Mini soccer star mod apk futbol oynamaq üçün əla seçimdir. Komanda qurmaq və oyun keyfiyyətini yoxlamaq üçün dream league soccer əla variantdır.
Soccer live tətbiqi ilə canlı izləmə daha rahatdır. Soccer streams ilə matçları online izləyin. Soccer predictions futbol nəticələrini təxmin etməyə kömək edir.
Opera sport soccer futbol xəbərləri üçün aktualdır. Soccer manager 2025 hile ilə əlavə imkanlar mövcuddur. World soccer champs apk son sürüm daha yaxşı işləyir. Dream league soccer 2017 sevilən versiyadır.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Особенно понравился раздел про Эффективные стратегии интернет-маркетинга для бизнеса.
Вот, делюсь ссылкой:
https://optimizer2011.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Идеи интерьеров и советы от студии Бельэтаж, загляните сюда.
Смотрите сами:
https://bel-etage.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Mobil soccer yükləyərək futbol əyləncəsini hər yerdə yaşayın.
Mini soccer star mod apk futbol oynamaq üçün əla seçimdir. ABŞ futbol liqası nəticələrini izləmək üçün major league soccer standings səhifəsinə daxil olun.
Bet365 soccer ilə idman mərclərinə qoşulun. Rocket soccer derby fərqli futbol janrını təqdim edir. Dream league soccer 2020 yenilənmiş qrafiklər ilə fərqlənir.
Soccer skills champions league ilə yeni bacarıqlar öyrənin. Soccer platform prediction nəticələri izləməyə kömək edir. Soccer live score ilə canlı nəticələri izləyin. Dream league soccer 2017 sevilən versiyadır.
Je suis emoustille par MrPacho Casino, c’est un festin ou chaque tour deploie des parfums de victoire. Le menu est un cellier de variete exuberante, avec des slots aux themes epices qui chatouillent les papilles. Le service officie en continu 24/7, avec une maestria qui anticipe les appetits. Les butins affluent via USDT ou fiat fluide, toutefois des garnitures de recompense additionnelles epiceraient les alliances. Pour couronner le plat, MrPacho Casino tisse une tapisserie de divertissement gustatif pour les maitres des paris crypto ! A souligner le portail est une salle a manger visuelle imprenable, allege la traversee des menus ludiques.
s inscrire sur mrpacho|
купить дипломы о высшем цены купить дипломы о высшем цены .
Je suis enivre par PepperMill Casino, on hume un verger de tactiques enivrantes. Il regorge d’une abondance de melanges interactifs, integrant des roulettes live pour des tourbillons d’arome. Le suivi cultive avec une constance impenetrable, accessible par infusion ou missive instantanee. Les retraits s’ecoulent avec une fluidite remarquable, par bouffees les bouquets d’offres pourraient s’epanouir en generosite. En concluant l’infusion, PepperMill Casino convie a une exploration sans satiete pour les explorateurs de casinos virtuels ! En piment sur le gateau la trame irradie comme un elixir ancestral, instille une quintessence de mystere epice.
peppermill reno map|
Mobil cihazlarda soccer oyunu yüksək keyfiyyətlə işləyir.
Flashscore mobile livescore today soccer ilə ani nəticələr alın. Futbol sevərlərə uyğun seçim http://www.soccer.com.az portalıdır.
Major league soccer standings nəticələrini hər gün yoxlayın. Soccer streams ilə matçları online izləyin. Soccer legends klassik futbol anlarını yaşadır.
Pro direct soccer məhsulları keyfiyyətli seçimdir. World soccer champs android oyun club versiyası çox populyardır. Livescore.com.tr live soccer scores azarkeşlər üçün əhəmiyyətlidir. Soccer legends futbolun tarixi anlarını oyuna gətirir.
Купить диплом колледжа в Запорожье http://www.educ-ua7.ru .
купить диплом об окончании колледжа купить диплом об окончании колледжа .
Je suis fondant pour Sugar Casino, on savoure un comptoir de tactiques allechantes. La collection est un sirop de divertissements delicieux, proposant des roulettes pour des tours de sucre. L’assistance distille des recettes nettes, avec une expertise qui anticipe les envies. Le processus est lisse comme du caramel, bien que les offres pourraient s’epaissir en generosite. Pour clore le sirop, Sugar Casino devoile un plateau de triomphes fondants pour les artisans de victoires sucrees ! En plus l’interface est un comptoir navigable avec delice, ce qui propulse chaque tour a un niveau gourmand.
sugar house casino hoteis|
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Особенно понравился раздел про Выбор идеального отеля в Санкт-Петербурге: советы и рекомендации.
Вот, делюсь ссылкой:
https://spb-hotels.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
J’eprouve une gourmandise infinie pour MrPacho Casino, c’est un festin ou chaque tour deploie des parfums de victoire. La carte est un grimoire de divertissements savoureux, offrant des jackpots progressifs des fournisseurs renommes comme Pragmatic Play. L’assistance distille des conseils affutes, distillant des remedes clairs et prompts. Les retraits glissent avec une souplesse remarquable, par eclats des amuse-bouches gratuits supplementaires rehausseraient les plats. Pour couronner le plat, MrPacho Casino emerge comme un pilier pour les epicuriens pour les gardiens des buffets numeriques ! A souligner le parcours est instinctif comme un arome familier, allege la traversee des menus ludiques.
avis mrpacho|
Soccer tətbiqi futbol həvəskarları üçün idealdır.
Soccer 365 ilə futbol xəbərlərindən xəbərdar olun. Yükləmə və quraşdırma qaydaları üçün https://soccer.com.az/ səhifəsinə daxil olun.
Major league soccer standings nəticələrini hər gün yoxlayın. Soccer ball mexanikası real futbol topuna çox yaxındır. World soccer champs apk para hilesi ilə əlavə resurs əldə edin.
Globe soccer awards beynəlxalq səviyyədə tanınır. Soccer champs apk yükləmək çox asandır. Pro evolution soccer 2019 hələ də çox oynanır. World soccer champs hile son sürüm oyunçuların seçimi olub.
Je suis redistribue par Shuffle Casino, on anticipe un paquet de ruses astucieuses. Le catalogue est un baril de divertissements hasardeux, proposant des crashes pour des chutes d’excitation. L’assistance tire des reponses affutees, accessible par bluff ou appel direct. Les transferts battent stables et acceleres, occasionnellement des cartes de recompense additionnelles piocheaient les alliances. A la fin de cette donne, Shuffle Casino se pose comme un atout pour les parieurs pour les baroudeurs de casinos virtuels ! En joker supplementaire le portail est une table visuelle imprenable, simplifie la traversee des paquets ludiques.
shuffle master casino|
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Особенно понравился раздел про Эксклюзивные скидки и советы по выбору косметики.
Смотрите сами:
https://skidkosmo.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
J’eprouve une gourmandise debordante pour Sugar Casino, on savoure un comptoir de tactiques allechantes. La collection est un sirop de divertissements delicieux, avec des slots aux themes sucres qui font fondre les lignes. Les artisans repondent avec une douceur remarquable, avec une expertise qui anticipe les envies. Les transferts glissent stables et acceleres, occasionnellement des eclats promotionnels plus frequents pimenteraient le panier. Pour clore le sirop, Sugar Casino se dresse comme un pilier pour les gourmands pour les gardiens des bonbonnieres numeriques ! En plus le portail est une vitrine visuelle imprenable, ce qui propulse chaque tour a un niveau gourmand.
sugar mama casino|
купить диплом в саранске купить диплом в саранске .
Если вы ищете, где смотреть онлайн сериалы и фильмы, вам на известный ресурс КИНОГО (https://kinogo-site.work/). Тут собрана обширная коллекция 2025 года без оплаты, в отличном качестве HD и без всякой регистрации. На Kinogo вас ждут помимо новинки, но и лучшая классика кино. Портал – это один из самых популярных киносайтов для поклонников кинематографа.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Особенно понравился раздел про Погрузитесь в мир чая вместе с Ролли.
Ссылка ниже:
https://rolli-elf.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Howdy! I simply wish to give a huge thumbs up for the great information you have here on this post. I will be coming again to your weblog for extra soon.
купить медицинский диплом медсестры купить медицинский диплом медсестры .
купить диплом техникума спб в барнауле купить диплом техникума спб в барнауле .
купить диплом в норильске купить диплом в норильске .
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
По теме “Традиционная русская кухня: рецепты и советы”, есть отличная статья.
Вот, можете почитать:
https://traktirseno.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Мы мечтали о доме в скандинавском стиле и заказали проект в СтройСинтез. Архитекторы предложили отличное решение, а строители реализовали его без задержек. Дом получился современный и стильный, полностью соответствует нашим ожиданиям https://stroysyntez.com/
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Зацепил раздел про Полное руководство для владельцев собак.
Вот, делюсь ссылкой:
https://argus-club.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Откройте секреты счастливого детства с качественными товарами от TykePop.
Хочу выделить материал про Рецензии и рекомендации книг на Booksis.
Ссылка ниже:
https://booksis.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Обсудим кофейную одиссею в Весенней Рапсодии, посмотрите сюда.
Вот, можете почитать:
https://spring-rapsodiy.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Soccer oyununda qrafika və animasiyalar çox realdır.
Mini soccer star mod apk futbol oynamaq üçün əla seçimdir. Müxtəlif futbol oyunlarını kəşf etmək üçün soccer games bölməsini sınayın.
Soccer live tətbiqi ilə canlı izləmə daha rahatdır. Soccer star oyunçular üçün motivasiyaedici seçimdir. Bubble soccer dostlarla əyləncəli vaxt keçirməyə imkan verir.
Soccer super star mod apk ilə ulduz olun. Soccer field dizaynı oyunda çox real görsənir. World soccer champs apk son sürüm daha yaxşı işləyir. Mini soccer star apk sadə və əyləncəlidir.
Наш интернет-магазин терял позиции и нуждался в грамотной оптимизации. Mihaylov Digital провели аудит, переписали карточки товаров и улучшили структуру сайта. Уже через три месяца мы увидели заметный рост продаж. Теперь сотрудничество продолжается на постоянной основе, https://mihaylov.digital/
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Особенно понравился материал про Уникальные DIY проекты: декор и эко-мебель.
Вот, делюсь ссылкой:
https://diyworks.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Je suis captive par Fezbet Casino, on dirait un festival de sensations brulantes. Les options sont un kaleidoscope de surprises, incluant des jeux de table d’une intensite torride. Le support est disponible 24/7, garantissant un support d’une puissance eclatante. Les retraits sont rapides comme un feu de savane, parfois plus de promos eclatantes seraient un regal. En conclusion, Fezbet Casino est une plateforme qui embrase les sens pour les joueurs en quete de chaleur ludique ! Cerise sur le gateau la plateforme scintille comme un mirage, donne envie de replonger dans l’oasis du jeu.
fezbet erfahrung|
Je suis intronise par SlotsPalace Casino, ca erige un empire de defis somptueux. Il regorge d’une procession de couronnes interactives, proposant des crash pour des chutes de trone. Le support client est un chambellan vigilant et perpetuel, avec une sagesse qui anticipe les complots. Les tributs affluent via Bitcoin ou Ethereum, a l’occasion des corteges promotionnels plus frequents dynamiseraient l’empire. En couronnant le regne, SlotsPalace Casino forge un empire de divertissement majestueux pour les monarques de casinos virtuels ! En sceptre supplementaire la structure rayonne comme un trone ancestral, infuse une essence de mystere royal.
slots palace casino promo code|
Je suis enivre par PepperMill Casino, ca transfigure le jeu en une infusion eternelle. Il regorge d’une abondance de melanges interactifs, proposant des blackjacks revisites pour des bouffees d’excitation. Les artisans repondent avec une acuite remarquable, avec une expertise qui presage les appetits. Les flux coulent stables et acceleres, toutefois plus d’infusions bonus quotidiennes parfumeraient l’atelier. En concluant l’infusion, PepperMill Casino tisse une tapisserie de divertissement olfactif pour ceux qui cultivent leur fortune en ligne ! En sus le portail est une serre visuelle imprenable, allege la traversee des vergers ludiques.
peppermill restaurant las vegas|
Откройте секреты счастливого детства с качественными товарами от TykePop.
По теме “Скрытые кулинарные сокровища со всего мира”, нашел много полезного.
Вот, делюсь ссылкой:
https://localflavors.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Je suis irresistiblement booste par Super Casino, ca catapulte le jeu vers un sommet heroique. Il vrombit d’une flotte de quetes interactives, integrant des lives comme Mega Ball pour des explosions de score. L’assistance deploie des tactiques affutees, assurant une protection fidele dans la zone. Les retraits decollent avec une acceleration remarquable, occasionnellement les protocoles d’offres pourraient s’amplifier en puissance. En activant le mode final, Super Casino invite a une patrouille sans repli pour les champions de victoires explosives ! Par surcroit la structure pulse comme un reacteur ancestral, incite a prolonger l’assaut infini.
super win online casino|
прогноз на хоккей прогноз на хоккей .
J’eprouve une gourmandise infinie pour MrPacho Casino, il orchestre une symphonie de gains succulents. La carte est un grimoire de divertissements savoureux, proposant des blackjack revisites pour des bouffees d’adrenaline. Le suivi veille avec une finesse sans pareille, assurant un accompagnement fidele au banquet. Les retraits glissent avec une souplesse remarquable, par intermittence plus de hors-d’?uvre bonus journaliers agrementeraient le festin. Dans l’ensemble du menu, MrPacho Casino tisse une tapisserie de divertissement gustatif pour les gardiens des buffets numeriques ! A souligner le parcours est instinctif comme un arome familier, instille une essence de mystere culinaire.
casino mrpacho|
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Хочу выделить материал про Эффект Павлина: Ваш гид в мире стиля и красоты.
Ссылка ниже:
[url=https://vpavlino.ru]https://vpavlino.ru[/url]
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Je suis irresistiblement couronne par SlotsPalace Casino, ca erige un empire de defis somptueux. Le royaume est un hall de diversite princiere, avec des slots aux themes grandioses qui font briller les lignees. Le suivi gouverne avec une loyaute absolue, mobilisant des allegeances multiples pour une audience immediate. Les retraits s’executent avec une grace remarquable, occasionnellement des couronnes gratuites supplementaires boosteraient les lignees. En apotheose royale, SlotsPalace Casino invite a une conquete sans abdication pour les seigneurs des paris crypto ! De surcroit le graphisme est une tapisserie dynamique et immersive, simplifie la traversee des halls ludiques.
spin palace casino mobile slots app|
Je suis aromatise par PepperMill Casino, ca transfigure le jeu en une infusion eternelle. La reserve de jeux est un herbier foisonnant de plus de 5 000 essences, integrant des roulettes live pour des tourbillons d’arome. L’assistance distille des elixirs affutes, infusant des remedes limpides et immediats. Le processus est moulu pour une onctuosite exemplaire, par intermittence des elans promotionnels plus assidus animeraient le jardin. En apotheose epicee, PepperMill Casino tisse une tapisserie de divertissement olfactif pour les alchimistes des enjeux crypto ! En primeur le parcours est instinctif comme un parfum familier, pousse a prolonger le festin infini.
peppermill lake tahoe|
Je suis propulse par Super Casino, ca catapulte le jeu vers un sommet heroique. Le QG est un centre de diversite explosive, integrant des lives comme Mega Ball pour des explosions de score. Le suivi escorte avec une vigilance absolue, accessible par alerte ou appel d’urgence. Les retraits decollent avec une acceleration remarquable, occasionnellement des missions promotionnelles plus intenses dynamisent l’arsenal. En activant le mode final, Super Casino construit un empire de divertissement invincible pour les gardiens de casinos virtuels ! A scanner la circulation est instinctive comme un jetpack, incite a prolonger l’assaut infini.
super casino revel|
Откройте секреты счастливого детства с качественными товарами от TykePop.
Для тех, кто ищет информацию по теме “Анализ и новости рынка недвижимости в России”, там просто кладезь информации.
Вот, можете почитать:
[url=https://anclaves.ru]https://anclaves.ru[/url]
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Pop Cop
Открывайте для себя мир кино на известном портале КИНОГО (https://kinogo-serials.work/). Здесь собрана обширная коллекция для того, чтобы смотреть онлайн сериалы и фильмы 2025 года без оплаты, в высоком качестве 1080p и без регистрации. На Kinogo доступны помимо новинок, но и лучшая классика. Сайт заслуженно входит в число самых популярных киносайтов Рунета.
useful link https://meteora.mba
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Эффект Павлина: Ваш гид в мире стиля и красоты, загляните сюда.
Ссылка ниже:
https://vpavlino.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
препараты от тревоги Чем лечат тревогу — это вопрос, который зависит от типа и тяжести тревожного расстройства, а также индивидуальных особенностей пациента. В целом, лечение тревоги включает в себя психотерапию, медикаментозное лечение и изменение образа жизни. Психотерапия, особенно когнитивно-поведенческая терапия (КПТ), является эффективным методом, помогающим пациентам выявлять и изменять негативные мысли и поведение, которые способствуют тревоге. КПТ обучает пациентов навыкам преодоления тревожных ситуаций и управления своими эмоциями. Медикаментозное лечение может включать антидепрессанты, такие как селективные ингибиторы обратного захвата серотонина (СИОЗС) и селективные ингибиторы обратного захвата серотонина и норадреналина (СИОЗСН), которые помогают регулировать уровень нейротрансмиттеров в мозге, отвечающих за настроение и тревогу. Анксиолитики, такие как бензодиазепины, могут использоваться для кратковременного облегчения острых симптомов тревоги, но их применение должно быть ограничено из-за риска развития зависимости. Изменение образа жизни, включающее регулярные физические упражнения, сбалансированное питание, достаточный сон и техники релаксации, также может помочь снизить уровень тревоги. В некоторых случаях может быть полезно обратиться к нетрадиционным методам лечения, таким как акупунктура и ароматерапия, но их эффективность требует дальнейших исследований. Важно помнить, что лечение тревоги должно быть индивидуальным и разрабатываться совместно с врачом или психотерапевтом.
https://www.wildberries.ru/catalog/249860602/detail.aspx
Reveal the Kraken
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Для тех, кто ищет информацию по теме “Лучшие DIY идеи и советы для дома”, нашел много полезного.
Вот, можете почитать:
https://stroi-skid.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
This Site https://pacifica.ltd
More about the author https://meteora.mba
teens porno
обучение кайтсёрфингу Кайт — это надувной паруc, используемый в кайтсёрфинге для перемещения по воде за счет силы ветра. Он состоит из ткани, специальных баллонов, заполняемых воздухом, строп и планки управления. Размеры кайта подбираются в зависимости от силы ветра и веса кайтера. Кайт является ключевым элементом оборудования для кайтсёрфинга.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Кстати, если вас интересует Вдохновляющие техники и советы по реставрации старых вещей, загляните сюда.
Вот, делюсь ссылкой:
[url=https://fjhg.ru]https://fjhg.ru[/url]
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
кайт египет Кайт Хургада: Кайт Хургада – это синоним кайтсерфинг-рая. Этот египетский город привлекает кайтсерферов со всего мира своими идеальными условиями для катания: стабильным ветром, теплой водой и песчаными пляжами. В Хургаде расположены десятки кайт школ и станций, предлагающих обучение на любом уровне подготовки, прокат оборудования и услуги по ремонту. На пляжах Хургады всегда царит атмосфера праздника и позитива. Здесь можно встретить кайтсерферов разных национальностей, обменяться опытом и просто хорошо провести время. Вечером, после катания, можно прогуляться по набережной, посетить местные магазины и рестораны или насладиться шоу в одном из отелей. Кайт Хургада – это не просто место для кайтсерфинга, это стиль жизни, полный приключений, свободы и новых знакомств.
Wild Cats Multiline
you can find out more https://meteora.kim/
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Между прочим, если вас интересует Лучшие приключения и советы для путешественников, загляните сюда.
Смотрите сами:
https://tourismis.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Big Game Spins 16
Откройте секреты счастливого детства с качественными товарами от TykePop.
Между прочим, если вас интересует Идеи интерьеров и советы от студии Бельэтаж, загляните сюда.
Смотрите сами:
https://bel-etage.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
кайт хургада Кайт-школа – это специализированное учреждение, предназначенное для обучения новичков и повышения квалификации действующих кайтеров. В школах работают опытные инструкторы, которые обучают управлению кайтом, рассказывают о технике безопасности и правилах поведения на воде, дают теоретические знания, необходимые для освоения кайтсерфинга. Школы обеспечивают обучающихся всем необходимым оборудованием, включая кайты, доски, гидрокостюмы и спасательные жилеты. Обучение в кайт-школе позволяет безопасно и эффективно освоить этот захватывающий вид спорта.
Всем киноманам спешу посоветовать отличнейший ресурс – КИНОГО (https://kinogo-mult.work/). В этой обширной медиатеке можно смотреть фильмы и сериалы абсолютно бесплатно. Весь контент доступна в высоком качестве, а для начала просмотра не требуется регистрация. Отдельного упоминания горячие новинки 2025 года. Залетайте на Kinogo – не пожалеете!
купить диплом в ревде купить диплом в ревде .
J’adore a fond Betsson Casino, il offre une plongee dans un univers vibrant. Il y a une profusion de jeux varies, proposant des jeux de table classiques comme le blackjack et la roulette. Le service d’assistance est irreprochable, garantissant une aide immediate. Les transactions sont protegees par un cryptage SSL 128 bits, bien que les offres comme le bonus de bienvenue de 100 % jusqu’a 100 € pourraient etre plus genereuses. Dans l’ensemble, Betsson Casino est une plateforme d’exception pour les joueurs en quete d’adrenaline ! Par ailleurs le design est visuellement attrayant et facile a naviguer, ajoute une touche de dynamisme a l’experience.
betsson bonus code casino|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Зацепил раздел про Профессиональный коучинг для здорового образа жизни.
Вот, делюсь ссылкой:
https://women-inet.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Ich finde absolut majestatisch King Billy Casino, es pulsiert mit einer koniglichen Casino-Energie. Der Katalog des Casinos ist eine Schatzkammer voller Spa?, inklusive eleganter Casino-Tischspiele. Der Casino-Support ist rund um die Uhr verfugbar, mit Hilfe, die wie ein Thron majestatisch ist. Casino-Transaktionen sind simpel wie ein koniglicher Befehl, aber die Casino-Angebote konnten gro?zugiger sein. Alles in allem ist King Billy Casino ein Online-Casino, das wie ein Konigreich strahlt fur Fans von Online-Casinos! Extra die Casino-Seite ist ein grafisches Meisterwerk, Lust macht, immer wieder ins Casino zuruckzukehren.
king billy casino singapore|
10 Things That Your Family Taught You About
Vehicle Key Repair vehicle key Repair
The Emirate II
Профессиональный фотограф в Москве готов предложить вам уникальные услуги, включая парная фотосессия в москве.
Каждый стиль имеет свои особенности и требует специфического подхода к съемке.
На сайте фотосъемки вы можете заказать услуги профессионального фотографа в Москве.
самые запоминающиеся события в столице России. Профессиональный фотограф в Москве поможет создать удивительные и неповторимые снимки . Фотосессия может проходить в любых условиях, будь то студия или уличная обстановка.
Фотография – это не только запечатление моментов, но и искусство передачи атмосферы и настроения . Фотограф в Москве, имеющий высокий уровень мастерства и творческий подход , может предложить разработку персонализированного плана фотосессии .
Существует различные варианты фотосессий, включая семейные, свадебные и детские. Фотосессия для свадьбы, дня рождения или другого значимого события требует глубокого понимания цели и задач фотосессии.
Фотограф в Москве, специализирующийся на фотографии пейзажей, архитектуры или натюрморта , может предложить уникальный и креативный подход к фотосессии . Фотосессия может быть осуществлена в разных форматах и вариантах.
Подготовка к фотосессии – это ключевой этап, на котором определяется концепция и задачи фотосессии. Фотограф в Москве поможет выбрать подходящую локацию и время суток .
Фотосессия может быть совершенно бесплатной и необязательной или строго профессиональной и коммерческой . Фотограф в Москве, имеющий способность работать в разных условиях и ситуациях, может предложить высокое качество фотографий и профессиональную обработку .
Результат фотосессии – это высококачественные и профессионально обработанные снимки . Фотограф в Москве, имеющий способность работать в разных условиях и ситуациях, может предложить индивидуальный подход и персонализированную поддержку .
Фотосессия в Москве – это уникальный шанс создать удивительные и неповторимые фотографии . Фотограф в Москве поможет сделать потрясающие и незабываемые снимки .
Для создания по-настоящему незабываемых фотографий в Москве, воспользуйтесь услугами [url=https://moscowmoment.ru/]фотосессия для резюме[/url], где опыт и креативность гарантируют вам действительно уникальные и запоминающиеся снимки.
В поисках талантливого фотографа в Москве можно наткнуться на множество интересных портретов и ландшафтов . С развитием технологий и появлением новых камер и программных средств возможности фотографии расширились Мировые тенденции в фотографии находят своё отражение в творчестве многих московских фотографов . Фотограф в Москве может предложить широкий спектр услуг включая портретную, свадебную, модную и документальную фотографию .
Фотография в Москве развивается с каждым днём новые студии и фотографические лаборатории открываются в городе . Фотографы в Москве часто принимают участие в различных выставках и конкурсах чтобы демонстрировать свои работы и делиться опытом с коллегами . Уровень конкуренции между фотографами в Москве достаточно высок каждый фотограф??тается создать свой уникальный и узнаваемый стиль .
Фотограф в Москве должен соответствовать определённым требованиям уметь работать с различным оборудованием и программным обеспечением . Одним из ключевых навыков фотографа является умение работать с людьми уметь создать комфортную и расслабленную атмосферу во время фотосессии . Кроме того, фотограф в Москве должен быть знаком с редакторским программным обеспечением которое позволяет совершенствовать фотографии и добавлять им необходимые эффекты .
Работа фотографа в Москве постоянно совершенствуется и иметь возможность быстро менять свою работу в зависимости от ситуации. Фотограф в Москве также должен быть организованным и способным управлять своим временем планировать и организовывать фотосессии, включая выбор мест и координацию с моделями . Профессиональный фотограф в Москве всегда стремится к совершенству постоянно ища новые идеи и вдохновение .
В Москве можно найти фотографов, специализирующихся на различных видах фотографии каждый из которых требует специфических навыков и подходов . Портретная фотография в Москве особенно популярна потому что люди хотят иметь высококачественные фотографии себя и своей семьи . Свадебная фотография также очень востребована фотографы в Москве предлагают услуги по фотографированию свадеб .
Модная фотография в Москве представлена множеством талантливых фотографов которые работают с известными модными брендами и журналами . Фотограф в Москве может также предложить услуги по коммерческой фотографии включая производственную, архитектурную и interior фотографию . Документальная фотография в Москве также развивается фотографы в Москве предлагают услуги по документальной фотографии .
Фотограф в Москве – это высококвалифицированный специалист и помочь клиенту запечатлеть важные моменты его жизни. Выбрать хорошего фотографа в Москве сегодня не составляет особого труда каждый из которых имеет свой уникальный стиль и подход к делу . Фотограф в Москве может стать настоящим помощником и создать уникальный и запоминающийся имидж.
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Кстати, если вас интересует Раскройте фотографический потенциал с Gloss & Matte, посмотрите сюда.
Смотрите сами:
[url=https://gloss-matte.ru]https://gloss-matte.ru[/url]
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
усиление грунтов privetsochi.ru/blog/realty_sochi/93972.html .
усиление углеволокном dpcity.ru/usilenie-betona-uglevoloknom-fundamentov-svayami-i-gruntov-inektirovaniem-yuviks-grupp-spb/ .
зеркало мелбет зеркало мелбет .
Купили кухонный гарнитур под ключ, включая проект и сборку. Все работы выполнили точно в срок, кухня полностью соответствует ожиданиям и стала главным местом в доме https://kuhni-v-dom.ru/
кухни на заказ петербург http://www.kuhni-spb-1.ru .
Page of Fortune Deluxe
Ich bin vollig hin und weg von King Billy Casino, es verstromt eine Spielstimmung, die wie ein Palast glanzt. Die Spielauswahl im Casino ist wie ein koniglicher Schatz, mit Live-Casino-Sessions, die wie ein Festbankett strahlen. Der Casino-Support ist rund um die Uhr verfugbar, liefert klare und schnelle Losungen. Auszahlungen im Casino sind schnell wie ein koniglicher Marsch, ab und zu mehr Freispiele im Casino waren ein Kronungsmoment. Kurz gesagt ist King Billy Casino ein Casino, das man nicht verpassen darf fur Spieler, die auf majestatische Casino-Kicks stehen! Extra das Casino-Design ist ein optisches Kronungsjuwel, einen Hauch von Majestat ins Casino bringt.
king billy casino games|
Je suis totalement enflamme par Celsius Casino, on dirait une eruption de fun. Le repertoire du casino est une veritable fournaise de divertissement, incluant des jeux de table de casino elegants et brulants. L’assistance du casino est chaleureuse et efficace, avec une aide qui fait des etincelles. Les retraits au casino sont rapides comme une braise, parfois des bonus de casino plus frequents seraient torrides. Au final, Celsius Casino est un casino en ligne qui met le feu pour les explorateurs du casino ! Bonus l’interface du casino est fluide et eclatante comme une flamme, ce qui rend chaque session de casino encore plus enflammee.
celsius casino bonus|
Je suis enthousiaste a propos de 7BitCasino, on dirait une sensation de casino unique. La gamme de jeux est tout simplement impressionnante, avec des machines a sous modernes et captivantes. Le service d’assistance est de premier ordre, offrant des reponses rapides et precises. Les retraits sont ultra-rapides, cependant davantage de recompenses seraient appreciees, comme des offres de cashback plus avantageuses. Pour conclure, 7BitCasino est un incontournable pour les joueurs en quete d’adrenaline ! De plus la navigation est intuitive et rapide, ajoute une touche de raffinement a l’experience.
7bitcasino login|
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Хочу выделить материал про Профессиональные шаги для безупречного свадебного дня.
Вот, можете почитать:
[url=https://medex52.ru]https://medex52.ru[/url]
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Рабочие стратегии и советы от Букмекерской Братва, посмотрите сюда.
Ссылка ниже:
https://mersobratva.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
visit their website https://jaxx-wallet.com/
20 Boost Hot
useful site https://web-jaxxwallet.org
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Специалист по ремонту и установке кондиционеров в вашем районе”, там просто кладезь информации.
Ссылка ниже:
https://aras-mebel.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
скачать 1хБет Ищете 1xBet официальный сайт? Он может быть заблокирован, но у 1хБет есть решения. 1xbet зеркало на сегодня — ваш главный инструмент. Это 1xbet зеркало рабочее всегда актуально. Также вы можете скачать 1xbet приложение для iOS и Android — это надежная альтернатива. Неважно, используете ли вы 1xbet сайт или 1хБет зеркало, вас ждет полный функционал: ставки на спорт и захватывающее 1xbet casino. 1хБет сегодня — это тысячи возможностей. Начните прямо сейчас!
click https://jaxx-wallet.com/
additional info https://jaxx-wallet.com/
Получение лицензии на медицинскую деятельность прошло гладко, специалисты центра сопровождали каждый шаг, проверяли документы и обеспечивали корректное оформление разрешения: https://licenz.pro/
Crazy Chilli
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Между прочим, если вас интересует Искусство и эстетика эротической фотографии, посмотрите сюда.
Ссылка ниже:
https://eroticpic.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Took me time to read all the comments, but I really enjoyed the article. It proved to be Very helpful to me and I am sure to all the commenters here It’s always nice when you can not only be informed, but also entertained I’m sure you had fun writing this article.
Откройте секреты счастливого детства с качественными товарами от TykePop.
Кстати, если вас интересует Как построить внутреннюю устойчивость с Лизой Мартин, посмотрите сюда.
Смотрите сами:
https://pravoedelomos.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Cleopatras Coins Treasure of the Nile
купить диплом в нижнем тагиле купить диплом в нижнем тагиле .
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Музыкальные обзоры и рецензии с MusicHunt Pro, посмотрите сюда.
Ссылка ниже:
https://musichunt.pro
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
find out here https://jaxx-wallet.com
You need to really control the comments listed here
купить официальный диплом с занесением в реестр https://frei-diplom6.ru .
заказать кухню в спб от производителя заказать кухню в спб от производителя .
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Кстати, если вас интересует Лучшие детские товары: здоровье и счастье с TykePop, загляните сюда.
Смотрите сами:
https://tykepop.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Mr Tains Party Night
J’adore a fond 1win Casino, c’est une veritable plongee dans un univers electrisant. Le choix de jeux est absolument gigantesque, proposant des jeux de table classiques et raffines. Les agents sont toujours prets a aider, avec un suivi irreprochable. Les retraits sont rapides et securises, parfois les offres pourraient etre plus genereuses. Pour conclure, 1win Casino ne decoit jamais pour ceux qui aiment parier ! Ajoutons que le design est visuellement attrayant, ajoute une touche d’elegance a l’experience.
1win bonus code|
official site https://jaxx-wallet.com
If you are going for best contents like myself, just pay a visit this web page everyday since it gives quality contents, thanks
great site https://web-jaxxwallet.org/
get redirected here https://jaxx-wallet.com/
купить диплом в озёрске https://www.rudik-diplom7.ru .
Откройте секреты счастливого детства с качественными товарами от TykePop.
Хочу выделить материал про Современные крои и стильные DIY проекты.
Вот, делюсь ссылкой:
https://studio-sk.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Lucky Mate is an online casino for Australian players, offering pokies, table games, and live dealer options. It provides a welcome bonus up to AUD 1,000, accepts Visa, PayID, and crypto with AUD 20 minimum deposit, and has withdrawal limits of AUD 5,000 weekly. Licensed, it promotes safe play: Lucky Mate
Alices Mad Fortune
Je suis totalement sous le charme de 1win Casino, ca ressemble a une aventure palpitante. Le choix de jeux est absolument gigantesque, incluant des slots de derniere generation. Les agents sont toujours prets a aider, avec un suivi irreprochable. Les gains arrivent en un temps record, cependant j’aimerais plus de promotions regulieres. Dans l’ensemble, 1win Casino est une plateforme exceptionnelle pour les amateurs de casino virtuel ! De plus le site est concu avec modernite, ajoute une touche d’elegance a l’experience.
1win en ligne|
Je suis totalement conquis par Betzino Casino, on dirait une plongee dans un univers palpitant. La gamme de jeux est tout simplement phenomenale, comprenant des jackpots progressifs comme Mega Moolah. Le service d’assistance est irreprochable, garantissant une aide immediate. Les retraits sont rapides, souvent traites en 24 heures pour les e-wallets, bien que plus de tours gratuits seraient un atout. Globalement, Betzino Casino offre une experience de jeu securisee avec un indice de securite de 7,1 pour les amateurs de casino en ligne ! Par ailleurs la navigation est intuitive sur mobile via iOS/Android, ajoute une touche de dynamisme a l’experience.
betzino casino france|
Продажа велосипедов по предзаказу
кракен darknet кракен onion кракен ссылка onion
Откройте секреты счастливого детства с качественными товарами от TykePop.
Особенно понравился материал про Экспертные советы по ремонту и тренды.
Вот, делюсь ссылкой:
https://svm31.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Visit This Link https://web-jaxxwallet.org
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Лучшие стратегии и бонусы для игры в онлайн-казино”, там просто кладезь информации.
Вот, можете почитать:
https://tars-rubber.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Rio Stars
Guide To Car Key Sensor Repair: The Intermediate Guide Towards Car Key Sensor
Repair Car Key Sensor Repair
visit this website https://web-jaxxwallet.org
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Для тех, кто ищет информацию по теме “Советы и идеи для ремонта и дизайна вашего дома”, есть отличная статья.
Вот, можете почитать:
https://vnukovookna.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Arabian Secret
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Изучаем сверхъестественные феномены и тайны вселенной”, там просто кладезь информации.
Смотрите сами:
https://phenoma.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
read this article https://jaxx-wallet.com
doosan b16x-5 аккумулятор
porno
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Кстати, если вас интересует Обсудим кофейную одиссею в Весенней Рапсодии, посмотрите сюда.
Вот, можете почитать:
https://spring-rapsodiy.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
усиление грунтов http://privetsochi.ru/blog/realty_sochi/93972.html .
Hot Patrick
Все этапы лицензирования проходили под профессиональным контролем центра, что обеспечило своевременное и корректное получение лицензии, минимизировало риски ошибок и сэкономило время: https://licenz.pro/
my blog https://jaxx-wallet.com
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Для тех, кто ищет информацию по теме “Неизведанные маршруты для путешествий по России”, есть отличная статья.
Ссылка ниже:
https://rustrail.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
read more https://web-jaxxwallet.org
ставки на хоккей ставки на хоккей .
9 Coins Grand Platinum Edition Xmas Edition
Je suis totalement scotche par Instant Casino, ca balance une vibe de jeu dementielle. La selection de titres de casino est dingue, incluant des jeux de table de casino styles. Les agents du casino sont rapides comme l’eclair, avec une aide qui pete le feu. Les transactions de casino sont simples comme un neon, par contre des recompenses de casino en plus ca ferait kiffer. Pour resumer, Instant Casino offre une experience de casino inoubliable pour les accros aux sensations de casino ! Bonus le site du casino est une tuerie graphique, facilite le delire total au casino.
eurogrand instant play casino|
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Уникальные мастер-классы по редким видам хобби”, нашел много полезного.
Вот, делюсь ссылкой:
https://fixora.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
Je suis totalement envoute par Cresus, c’est une plateforme qui brille. La selection est tout simplement majestueuse, incluant des jeux de table elegants. Le support est disponible 24/7, repondant en un eclair. Les paiements sont securises et efficaces, de temps en temps les offres pourraient etre plus genereuses. Globalement, Cresus garantit un divertissement princier pour les amateurs de casino en ligne ! Notons aussi la navigation est intuitive et rapide, facilite une immersion totale.
cresus montre paris|
J’apprecie enormement 1xbet Casino, ca procure une experience de jeu exaltante. La gamme de jeux est tout simplement phenomenale, comprenant des titres innovants et engageants. Les agents sont toujours disponibles et efficaces, avec un suivi de qualite. Le processus de retrait est simple et fiable, occasionnellement plus de tours gratuits seraient un atout. Globalement, 1xbet Casino offre une experience de jeu remarquable pour ceux qui aiment parier ! En bonus l’interface est fluide et moderne, facilite chaque session de jeu.
1xbet en france|
LaLiga statistikası hər gün yenilənir. İspaniyanın lider komandalarını tanı.
LaLiga canlı yayımını telefondan açmaq mümkündür. LaLiga logo png fayllarını tapmaq asandır.
Yeni “LaLiga EA Sports” loqosu və turnir xəbərləri üçün laliga ispaniya səhifəsinə baxın.
2025-ci ilin ən yaxşı hücumçuları artıq məlumdur.
LaLiga tv canlı baxmaq üçün seçimlər.
LaLiga stats hər mövsüm yenilənir.
Ən çox titul qazanan LaLiga klubları hansılardır?.
LaLiga oyunlarının qrafiki və nəticələri burada.
useful reference https://web-jaxxwallet.org
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
По теме “Достигай цели с помощью тренера и автора Ния Дом”, есть отличная статья.
Вот, делюсь ссылкой:
https://niya.su
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
Resources https://web-jaxxwallet.org
Forest Richness
go right here https://jaxx-wallet.com/
J’apprecie enormement Betway Casino, ca ressemble a une aventure pleine d’adrenaline. La selection de jeux est impressionnante avec plus de 450 titres, proposant des jeux de table classiques comme le blackjack et la roulette. Le personnel offre un accompagnement rapide et efficace, offrant des reponses claires et utiles. Le processus de retrait est simple et fiable, neanmoins plus de tours gratuits seraient un atout. Dans l’ensemble, Betway Casino ne decoit jamais pour les adeptes de sensations fortes ! Par ailleurs le design est visuellement attrayant, ce qui amplifie le plaisir de jouer.
betway promotion|
Когда решили менять окна в квартире, долго искали надежную компанию и в итоге обратились в Окна в СПб. Сначала приехал замерщик, всё объяснил, предложил несколько вариантов и даже подсказал, какие окна лучше подойдут для нашей стороны дома. Монтаж прошёл быстро, вежливые мастера всё сделали за один день и оставили после себя порядок. Окна получились ровные и герметичные, никаких сквозняков нет. Очень порадовало, что цена оказалась ниже, чем мы ожидали. Теперь в квартире тепло, тихо и уютно, особенно зимой https://okna-v-spb.ru/
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
По теме “Идеи интерьеров и советы от студии Бельэтаж”, нашел много полезного.
Смотрите сами:
[url=https://bel-etage.ru]https://bel-etage.ru[/url]
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
teens porno
LaLiga oyunlarını izləmək indi çox asandır. LaLiga table 2025 artıq açıqlandı.
Hər oyunun canlı statistikası əlinizdə. LaLiga logo png fayllarını tapmaq asandır.
Yeni xal cədvəli üçün ən doğru ünvan — laliga table 2025. Orada bütün komandalar barədə məlumat var.
LaLiga bombardirlər siyahısı yeniləndi.
Bu həftənin LaLiga oyunları çox həyəcanlı olacaq.
LaLiga takımları arasında rəqabət yüksəkdir.
Ən çox titul qazanan LaLiga klubları hansılardır?.
İspaniya LaLiga futbol atmosferini yaşayın.
Disco Fever
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Между прочим, если вас интересует Ваш новый сайт готов к запуску!, загляните сюда.
Смотрите сами:
https://alloopt.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
LaLiga oyunlarını izləmək indi çox asandır. İspaniyanın lider komandalarını tanı.
Futbol sevərlərə LaLiga canlı izləmə təcrübəsi. LaLiga logo png fayllarını tapmaq asandır.
Futbol xəbərlərini izləmək üçün bu linki yoxlayın — http://www.laliga.com.az.
Hər mövsüm LaLiga top scorers fərqlənir.
İspaniya LaLiga oyun cədvəlini buradan yoxla.
Ən yaxşı LaLiga oyunçuları 2025.
LaLiga kupası uğrunda mübarizə həyəcanı.
İspaniya LaLiga futbol atmosferini yaşayın.
official website https://jaxx-wallet.com
10 Unexpected Keyless Entry Repair Tips vehicle keyless Entry repair
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Кстати, если вас интересует ОШИБКА: Не удалось получить контент., посмотрите сюда.
Вот, можете почитать:
https://zachitaprav.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
LaLiga canlı izləmə üçün ideal mənbədir. LaLiga standings səhifəsi ilə hər şeyi bil.
LaLiga canlı yayımını telefondan açmaq mümkündür. LaLiga logo dizaynı hər il yenilənir.
Yeni “LaLiga EA Sports” loqosu və turnir xəbərləri üçün laliga ispaniya səhifəsinə baxın.
Hər mövsüm LaLiga top scorers fərqlənir.
LaLiga maçlar və canlı yayım üçün bələdçi.
LaLiga stats hər mövsüm yenilənir.
All LaLiga winners tarixi maraqlıdır.
Spaniyada futbolun nəbzi LaLiga ilə vurur.
The 9 Things Your Parents Taught You About Car Key Remote Repair
Car key remote repair (levertmusic.net)
Lucky Jungle 1024
Недавно скачал курс по таргетированной рекламе через Складчик. Всё прошло просто: выбрал складчину, оплатил и получил доступ. Цена минимальная, а материал полноценный. Очень доволен сервисом https://v27.skladchik.org/
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Хочу выделить материал про ФутБетПро: прогнозы, стратегии и сообщество для успешных ставок.
Вот, делюсь ссылкой:
https://fk-almazalrosa.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Fruit Story
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Между прочим, если вас интересует Идеи интерьеров и советы от студии Бельэтаж, загляните сюда.
Ссылка ниже:
https://bel-etage.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
микрозаймы онлайн без отказа проверки мгновенно Я легко возвращаю деньги через тот же сервис, где взял займ без процентов онлайн микрозайм.
Приобрести диплом о высшем образовании поможем. Купить диплом в Ижевске – diplomybox.com/kupit-diplom-izhevsk
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Для тех, кто ищет информацию по теме “Современное искусство: вдохновение и знания с DeviArts”, нашел много полезного.
Вот, можете почитать:
https://deviarts.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
усиление углеволокном https://www.dpcity.ru/usilenie-betona-uglevoloknom-fundamentov-svayami-i-gruntov-inektirovaniem-yuviks-grupp-spb/ .
Benny the Beer
Je suis enthousiaste a propos de Azur Casino, on dirait une sensation de casino unique. Le choix de jeux est epoustouflant, comprenant des titres modernes et attrayants. Le service client est exceptionnel, disponible 24/7. Les paiements sont securises et fluides, cependant les offres pourraient etre plus allechantes. Dans l’ensemble, Azur Casino ne decoit jamais pour ceux qui cherchent l’adrenaline ! Ajoutons que la navigation est intuitive et agreable, facilitant l’immersion totale.
azur casino.|
Sou fazaco do DazardBet Casino, oferece uma experiencia de cassino que e fogo puro. A selecao de titulos do cassino e de outro mundo, com jogos de cassino perfeitos para criptomoedas. O servico do cassino e top e confiavel, garantindo suporte de cassino imediato e certeiro. O processo do cassino e limpo e sem complicacao, de vez em quando mais bonus regulares no cassino seria demais. Ta na cara, DazardBet Casino vale muito a pena explorar esse cassino para os aventureiros do cassino! De quebra a interface do cassino e fluida e mega estilosa, da um toque de classe ao cassino.
dazardbet casino opinie|
J’adore le casino TonyBet, il est carrement un univers de jeu unique. La selection de machines est vaste, avec des machines a sous modernes. Les agents sont reactifs, disponible 24/7. On recupere ses gains vite, neanmoins les offres pourraient etre plus genereuses. Pour tout dire, TonyBet vaut vraiment le coup pour les joueurs passionnes ! Par ailleurs, la plateforme est intuitive, ce qui rend l’experience encore meilleure.
tonybet lietuva|
Обложки песни Музыкальная обложка – это визуальное представление вашего музыкального произведения. Это первое, что видит слушатель, когда знакомится с вашей музыкой, и именно это может повлиять на его решение прослушать трек или нет. Поэтому, музыкальная обложка должна быть не только эстетически привлекательной, но и соответствовать стилю и настроению вашей музыки. Используйте яркие цвета, оригинальные изображения и интересные шрифты, чтобы привлечь внимание потенциальных слушателей. Учитывайте тренды в дизайне, но не забывайте о своей индивидуальности. Музыкальная обложка должна быть узнаваемой и запоминающейся, чтобы слушатели могли легко идентифицировать вашу музыку среди множества других треков. Не экономьте на дизайне музыкальной обложки, ведь это инвестиция в успех вашего музыкального проекта. Сотрудничество с опытным дизайнером поможет вам создать обложку, которая будет отражать вашу музыку и привлекать новых слушателей.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
По теме “Полезные советы и рецепты для всех случаев”, нашел много полезного.
Смотрите сами:
[url=https://classifields.ru]https://classifields.ru[/url]
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
мелбет казино официальный сайт мелбет казино официальный сайт .
вывод из запоя москва клиника https://www.narkologicheskaya-klinika-19.ru .
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Хочу выделить материал про Все о создании и управлении умным домом.
Вот, можете почитать:
https://publicrate.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Website https://ipodtouch3g.ru/ .
кухня на заказ спб от производителя недорого http://www.kuhni-spb-1.ru .
Hər turun nəticələri real vaxtda yenilənir. LaLiga cədvəlini izləmək istəyirsinizsə, ən son məlumatlar buradadır.
LaLiga canlı futbol həvəskarlarının seçimi. LaLiga logo dizaynı hər il yenilənir.
Ən aktual xal cədvəli üçün https://laliga.com.az bölməsinə baxın.
LaLiga goal of the season 2022 hələ də yadda qalır.
LaLiga 24/25 təqvimi artıq hazırdır.
LaLiga statistika səhifəsində komanda göstəriciləri.
Ən çox titul qazanan LaLiga klubları hansılardır?.
Futbol azarkeşləri üçün LaLiga livescore bölməsi.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
По теме “Обучение программированию с IT Classic: советы и новости”, там просто кладезь информации.
Ссылка ниже:
[url=https://it-classic.ru]https://it-classic.ru[/url]
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Hello! Would you mind if I share your blog with my zynga group? There’s a lot of people that I think would really appreciate your content. Please let me know. Cheers
keepstyle
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Для тех, кто ищет информацию по теме “Обзоры и история брендов часов: новости и руководства”, есть отличная статья.
Ссылка ниже:
https://buytime.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Уникальные техники йоги и медитации для начинающих”, там просто кладезь информации.
Смотрите сами:
https://yogapulse.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
https://ozon.ru/t/csgBrx8
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Особенно понравился материал про Увлекательные статьи и советы на Clasifieds 360.
Ссылка ниже:
https://clasifieds.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
black porno
Website https://photo-res.ru/ .
Откройте секреты счастливого детства с качественными товарами от TykePop.
Для тех, кто ищет информацию по теме “Специалист по ремонту и установке кондиционеров в вашем районе”, нашел много полезного.
Ссылка ниже:
https://aras-mebel.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Je suis a fond dans Gamdom, ca donne une energie de jeu demente. La selection est totalement dingue, avec des slots qui claquent grave. L’assistance est au top du top, garantissant un support direct et carre. Les paiements sont fluides et blindes, quand meme des recompenses en plus ca ferait kiffer. Au final, Gamdom garantit un fun intergalactique pour les aventuriers du jeu ! Et puis la plateforme claque avec son look de feu, ce qui rend chaque session encore plus kiffante.
code affiliation gamdom|
Je kiffe a mort FatPirate, il offre une aventure totalement barge. Le catalogue est une vraie caverne aux tresors, comprenant des jeux tailles pour les cryptos. Le support est dispo 24/7, garantissant un support direct et efficace. Les retraits sont rapides comme une tempete, des fois les offres pourraient etre plus genereuses. Dans le fond, FatPirate offre une experience de ouf pour les accros aux sensations fortes ! Bonus l’interface est fluide et ultra-cool, donne envie de replonger direct.
fatpirate nederland|
Sou louco pela energia de Brazino Casino, tem uma energia de jogo tao vibrante quanto um recife de corais. As opcoes sao ricas e reluzem como conchas. oferecendo sessoes ao vivo que brilham como aguas cristalinas. O suporte e um farol subaquatico. respondendo veloz como uma mare. As transacoes sao simples como uma bolha. ocasionalmente mais giros gratis seriam uma loucura marinha. Ao final, Brazino Casino e o point perfeito pros fas de cassino para os viciados em emocoes de cassino! Como extra a navegacao e facil como uma corrente marinha. criando uma experiencia de cassino subaquatica.
que es brazino777|
Для максимально комфортного вечера настоятельно рекомендую – КИНОГО (https://kinogo-jay.work/). Управление и структура продуманы до мелочей. Я уже успешно посмотрел все свежие релизы 2025 года на Kinogo, и всё это – абсолютно бесплатно и в отличном качестве. Прекрасная возможность смотреть фильмы в пару кликов.
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
По теме “Автопутешествия по России: советы и вдохновение”, нашел много полезного.
Вот, делюсь ссылкой:
https://sibvaleo-kmv.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Для тех, кто ищет информацию по теме “Все об отелях: советы и обзоры для идеального отдыха”, нашел много полезного.
Вот, можете почитать:
[url=https://095hotel.ru]https://095hotel.ru[/url]
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
кухни на заказ санкт петербург кухни на заказ санкт петербург .
Je suis carrement scotche par Gamdom, on dirait une explosion de fun. Les options sont ultra-riches et captivantes, offrant des machines a sous ultra-cool. L’assistance est au top du top, avec une aide qui dechire tout. Les gains arrivent en mode TGV, par moments des bonus plus reguliers ce serait la classe. Dans le fond, Gamdom c’est du lourd a tester direct pour les fans de casinos en ligne ! A noter aussi la navigation est simple comme un jeu d’enfant, facilite le delire total.
gamdom australia|
J’adore le delire de FatPirate, il offre une aventure totalement barge. La selection est carrement dingue, proposant des sessions live ultra-intenses. L’assistance est carrement geniale, garantissant un support direct et efficace. Le processus est clean et sans galere, mais bon les offres pourraient etre plus genereuses. En gros, FatPirate est une plateforme qui envoie du pate pour les aventuriers du jeu ! A noter aussi la navigation est simple comme un jeu d’enfant, ajoute un max de swag.
fatpirate casino avis|
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
Для тех, кто ищет информацию по теме “Раскройте фотографический потенциал с Gloss & Matte”, есть отличная статья.
Смотрите сами:
https://gloss-matte.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
teens porno
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Хочу выделить материал про Рабочие стратегии и советы от Букмекерской Братва.
Вот, можете почитать:
https://mersobratva.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Откройте секреты счастливого детства с качественными товарами от TykePop.
Зацепил раздел про Скрытые кулинарные сокровища со всего мира.
Вот, делюсь ссылкой:
https://localflavors.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Car Key Shell Repair Techniques To Simplify Your Daily Life Car Key Shell Repair Trick Every Person Should
Learn car Key Shell repair
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Хочу выделить раздел про Идеи интерьеров и советы от студии Бельэтаж.
Вот, можете почитать:
https://bel-etage.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
Гарантия качества на все велосипеды актуальные зеркала kraken кракен onion сайт kra ссылка kraken сайт
helpful site https://azapainters.com
SafePal Wallet ensures safe cold storage. The SafePal App complements it with secure DeFi tools.
Safepal Wallet
safepalwallet.cc
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Кстати, если вас интересует Рецензии и рекомендации книг на Booksis, посмотрите сюда.
Смотрите сами:
https://booksis.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Home Page https://cinefiel.com
What’s The Current Job Market For Car Keyless Start Repair Professionals Like?
Car Keyless Start Repair
hop over to this website https://mowsharper.com/
image source https://thegardendesignworkshop.com/
next https://semamorey.com
his explanation https://goaarfid.com/
official site https://tivoracloud.com/
GSA Backlinks
Публикую ссылки на:
Публикация
Блог-комментарий
Форум
Гостевая книга
Отзыв к фото
Социальные заметки
Веб-платформа
База знаний
Удельный вес всех источников исходя из числа размещений различается, потому что работаю с новую базу.
click to find out more https://shiomagazine.com/
redirected here https://silkbatikart.com/
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Экспертные обзоры отелей и советы для путешественников”, там просто кладезь информации.
Смотрите сами:
https://all-hotels-online.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
Pirámide de enlaces SEO
Estrategia de backlinks SEO en tres etapas: hasta 30,000 enlaces de calidad superior, informes en Majestic y estrategia escalonada para mejorar tu ranking en Google. Planes desde USD 180
Etapa 1 – Backlinks simples
Etapa 2 – Backlinks a través de redirecciones de dominios de autoridad, por ejemplo
Etapa 3 – Colocación en sitios analizadores, por ejemplo
Explicación de la etapa 3: solo se coloca la página principal del sitio en los analizadores; no es posible añadir páginas internas
Las tres etapas se realizan paso a paso, con un total de diez mil a treinta mil backlinks provenientes de los tres niveles
Esta estrategia de pirámide de enlaces es una de las más efectivas
Lista de cuarenta analizadores
Precios:
Basic – 180$ – 10000 Backlinks
Standard – 200$ – 20000 Backlinks
Premium – 220$ – 30000 Backlinks
Spintax de artículos para garantizar que cada publicación sea única — 30$
детский психотерапевт Тревожность лечение депрессия аутизм у взрослых Лечение тревожности, депрессии и аутизма у взрослых требует комплексного подхода, учитывающего индивидуальные особенности каждого человека. Психотерапия, такая как когнитивно-поведенческая терапия (КПТ), может помочь людям с тревожностью и депрессией научиться справляться со своими мыслями и чувствами, а также развить более эффективные стратегии поведения. Для людей с аутизмом психотерапия может быть направлена на развитие социальных навыков, улучшение коммуникации и снижение сенсорной чувствительности. Медикаментозное лечение также может быть полезным для некоторых людей с тревожностью и депрессией. Важно обратиться к квалифицированному специалисту для получения индивидуального плана лечения, учитывающего все аспекты состояния и потребности пациента.
Click Here https://goalorientedhomedesign.com/
купить диплом вуза с занесением в реестр купить диплом вуза с занесением в реестр .
купить диплом с занесением в реестр в спб http://www.frei-diplom6.ru .
v1av8 – Some parts load, some don’t; feels like a work in progress.
like this https://lorivawater.com/
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Между прочим, если вас интересует Советы и тренды путешествий: Всё об отелях, загляните сюда.
Вот, можете почитать:
https://hotelnews.ru
Если у вас возникли вопросы или пожелания, наша команда всегда готова помочь. До скорых встреч!
click over here https://myideastoday.com/
browse around this website https://boujiwater.com/
Je suis allie avec Mafia Casino, ca eleve le jeu a un niveau de boss legendaire. Il pullule d’une legion de complots interactifs, integrant des lives comme Infinite Blackjack pour des negociations tendues. Les lieutenants repondent avec une discretion remarquable, accessible par message code ou appel direct. Les retraits s’executent avec une furtivite remarquable, a l’occasion des rackets de recompense additionnels scelleraient les pactes. A la fin de cette conspiration, Mafia Casino forge une legende de jeu gangster pour les mafiosi des paris crypto ! De surcroit la circulation est instinctive comme un chuchotement, ce qui propulse chaque pari a un niveau de don.
mafia casino|
official site https://shiomagazine.com
Ich bin begeistert von Snatch Casino, es liefert ein aufregendes Abenteuer. Das Spielangebot ist beeindruckend, mit spannenden Sportwetten. Der Service ist von bemerkenswerter Effizienz, garantiert sofortige Hilfe. Die Zahlungen sind flussig und sicher, manchmal mehr Freispiele waren ein Plus. Zusammenfassend Snatch Casino ist ein Must fur Spieler fur Adrenalin-Junkies ! Beachten Sie auch die Site ist stylish und schnell, was das Spielvergnugen steigert.
useful source https://bygoodhumans.com/
Je kiffe a fond Impressario, on dirait une scene de fun explosif. Le catalogue est un festival de titres, offrant des machines a sous qui claquent. Le support est dispo 24/7, avec une aide qui fait mouche. Les retraits sont fluides comme une choregraphie, mais bon les offres pourraient etre plus genereuses. Au final, Impressario est une plateforme qui vole la vedette pour les artistes du jeu ! Cote plus la navigation est simple comme une melodie, ajoute un max de charisme.
impressario casino review|
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Кстати, если вас интересует Экспертные обзоры отелей и советы для путешественников, посмотрите сюда.
Смотрите сами:
https://all-hotels-online.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
click site https://elvirotree.com
Sou viciado no role de FSWin Casino, da uma energia de cassino que e fora da curva. O catalogo de jogos do cassino e uma loucura total, com slots de cassino unicos e eletrizantes. O atendimento ao cliente do cassino e um arraso, com uma ajuda que e pura energia. Os pagamentos do cassino sao lisos e blindados, de vez em quando as ofertas do cassino podiam ser mais generosas. No geral, FSWin Casino e um cassino online que e uma pedrada para quem curte apostar com estilo no cassino! De bonus o design do cassino e uma explosao visual, da um toque de classe braba ao cassino.
fswin|
look at more info https://molirafire.com/
Вашему малышу нужно самое лучшее? Прошлите с нами в мир заботы и радости с продуктами от TykePop.
Особенно понравился раздел про Улучшите психологическое здоровье с Человекологией.
Вот, можете почитать:
https://roleresources.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
наркологический диспансер москва http://narkologicheskaya-klinika-20.ru/ .
this content https://goalorientedhomedesign.com/
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Хочу выделить материал про Скидка 25% на услуги красоты для женщин.
Смотрите сами:
https://libka-lylytay.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
лечение зависимости на дому https://narkolog-na-dom-1.ru/ .
Get the facts https://bygoodhumans.com/
Откройте секреты счастливого детства с качественными товарами от TykePop.
Хочу выделить раздел про Автопутешествия по России: советы и вдохновение.
Смотрите сами:
https://sibvaleo-kmv.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Профессиональный фотограф в Москве готов предложить вам уникальные услуги, включая фотосъемка в стиле ню.
Понимание техники и умение работать с различными условиями освещения играют решающую роль в конечном результате
На сайте бизнес фотосессия вы можете заказать услуги профессионального фотографа в Москве.
самые значимые даты в столице России. Профессиональный фотограф в Москве поможет создать удивительные и неповторимые снимки . Фотосессия может проходить в различных локациях, от природных пейзажей до городских улиц .
Фотография – это не только запечатление моментов, но и искусство выявления и фиксации эмоций . Фотограф в Москве, имеющий глубокое понимание своих клиентов и их пожеланий, может предложить разработку персонализированного плана фотосессии .
Существует много разных типов фотосессий, каждая со своим уникальным стилем и атмосферой . Фотосессия для запечатления памятных моментов или documento значимых событий требует определенного подхода и стиля .
Фотограф в Москве, специализирующийся на фотографии пейзажей, архитектуры или натюрморта , может предложить уникальный и креативный подход к фотосессии . Фотосессия может быть осуществлена в разных форматах и вариантах.
Подготовка к фотосессии – это ключевой этап, на котором определяется концепция и задачи фотосессии. Фотограф в Москве поможет определить цель и задачи фотосессии .
Фотосессия может быть совершенно бесплатной и необязательной или строго профессиональной и коммерческой . Фотограф в Москве, имеющий способность работать в разных условиях и ситуациях, может предложить индивидуальный подход и персонализированную поддержку .
Результат фотосессии – это потрясающие и эмоциональные изображения. Фотограф в Москве, имеющий глубокое понимание своих клиентов и их пожеланий , может предложить высокое качество фотографий и профессиональную обработку .
Фотосессия в Москве – это уникальный шанс создать удивительные и неповторимые фотографии . Фотограф в Москве поможет сделать потрясающие и незабываемые снимки .
Get [url=https://www.fidetec.com/7sim/]7sim net[/url] for convenient and secure registration on various services.
In addition to providing numbers, these services often include features like voicemail and call forwarding, further increasing their functionality.
Bonuses https://kelvanogear.com/
Home Page https://ypcphotographers.com
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
По теме “Музыкальные обзоры и рецензии с MusicHunt Pro”, нашел много полезного.
Ссылка ниже:
https://musichunt.pro
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
black porno
visit here https://townhaushome.com
you could try these out https://cdekankara.com/
basics https://grvyonetweb.com/
imp source https://oilcanvasmaster.com
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Зацепил материал про Обучение программированию с IT Classic: советы и новости.
Вот, делюсь ссылкой:
https://it-classic.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
go https://meadowfinreth.com
Learn More https://lorthamere.com/
weblink https://melodycrafthub.com
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Кстати, если вас интересует Погрузитесь в мир чая вместе с Ролли, загляните сюда.
Вот, делюсь ссылкой:
https://rolli-elf.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
новости баскетбола новости баскетбола .
See What Ignition Key Repair Tricks The Celebs Are Making Use Of Ignition Key Repair
новости футбола новости футбола .
Если основной сайт Вавада не открывается, есть решение — рабочие зеркала всегда доступны по адресу http://sportdialog.ru/native/inc/kak_zayti_na_vavada_cherez_zerkala.html. Добавьте страницу в закладки, чтобы не терять доступ к бонусам и турнирам.
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
По теме “Присоединяйтесь к “Квазару” — учитесь и исследуйте космос!”, есть отличная статья.
Смотрите сами:
https://qazar.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
navigate to this website https://facestrokes.com/
Your Domain Name https://autocentercemquerer.com/
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Кстати, если вас интересует Элитные автомобили: стиль жизни и советы, посмотрите сюда.
Вот, можете почитать:
https://cadillac-forum.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Our site https://vallythros.com/
Качественные велосипеды с быстрой доставкой кракен onion сайт kraken onion kraken onion ссылка kraken onion зеркала
try this https://lorthamere.com
Добро пожаловать в мир лучших детских товаров с TykePop, где здоровье и счастье ваших малышей — наши главные приоритеты.
Кстати, если вас интересует Изучение русских диалектов на LingoMap, загляните сюда.
Ссылка ниже:
https://lingomap.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
porno
How long does it take you to write an article like this?
kadıköy avukat
Откройте секреты счастливого детства с качественными товарами от TykePop.
Хочу выделить раздел про Новые вечерние платья и аксессуары со скидкой 30%.
Смотрите сами:
https://dejaviu.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Ich finde es unglaublich Snatch Casino, es bietet einen einzigartigen Thrill. Die Optionen sind umfangreich und abwechslungsreich, mit spannenden Sportwetten. Der Support ist 24/7 verfugbar, erreichbar jederzeit. Der Prozess ist einfach und reibungslos, jedoch zusatzliche Belohnungen waren top. Insgesamt Snatch Casino bietet garantiertes Vergnugen fur Crypto-Liebhaber ! Au?erdem die Site ist stylish und schnell, was das Spielvergnugen steigert.
snatch casino bonus codes|
Je kiffe grave Instant Casino, ca donne une energie de casino survoltee. Le catalogue de jeux de casino est colossal, proposant des sessions de casino live qui dechirent. Le crew du casino assure un suivi de ouf, offrant des reponses qui claquent. Les paiements du casino sont fluides et securises, par contre des recompenses de casino en plus ca ferait kiffer. Au final, Instant Casino garantit un fun de casino supersonique pour les accros aux sensations de casino ! A noter aussi la plateforme du casino claque avec son look electrisant, ce qui rend chaque session de casino encore plus kiffante.
slotastic casino instant play|
Adoro completamente Flabet Casino, da uma energia de jogo louca. Ha uma diversidade de jogos incrivel, com slots modernos e cativantes. O servico e de uma eficiencia notavel, contatavel a qualquer momento. O processo e simples e sem problemas, por vezes recompensas adicionais seriam top. Em conclusao, Flabet Casino vale realmente a pena para os fas de apostas online ! Ademais o design e atraente e intuitivo, o que aumenta o prazer de jogar.
site flabet|
visit this page https://leehanhan.com/
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Все о создании и управлении умным домом, загляните сюда.
Смотрите сами:
https://publicrate.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Ich bin begeistert von Snatch Casino, es fuhlt sich wie ein Sturm des Vergnugens an. Es gibt eine unglaubliche Vielfalt an Spielen, mit modernen und fesselnden Slots. Die Agenten sind super reaktionsschnell, bietet prazise Losungen. Die Gewinne kommen schnell, gelegentlich mehr variierte Boni waren toll. Global Snatch Casino lohnenswert fur Online-Wetten-Enthusiasten ! Zusatzlich die Navigation ist super einfach, fugt Komfort zum Spiel hinzu.
snatch casino 50 freespins no deposit|
Je kiffe grave Instant Casino, il propose une experience de casino explosive. Le catalogue de jeux de casino est colossal, proposant des sessions de casino live qui dechirent. Le crew du casino assure un suivi de ouf, repondant en un flash. Les paiements du casino sont fluides et securises, par moments des bonus de casino plus reguliers ce serait top. En gros, Instant Casino c’est un casino de ouf a tester direct pour les pirates des slots de casino modernes ! A noter aussi l’interface du casino est fluide et ultra-cool, ajoute un max de swag au casino.
ruby fortune instant play casino|
The 10 Scariest Things About Keyless Remote Repair Keyless Remote Repair
Откройте секреты счастливого детства с качественными товарами от TykePop.
Особенно понравился материал про ФутБетПро: прогнозы, стратегии и сообщество для успешных ставок.
Вот, можете почитать:
https://fk-almazalrosa.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
Je suis pactise avec Mafia Casino, ca forge un syndicate de defis impitoyables. La cache de jeux est un arsenal cache de plus de 5000 armes, proposant des crash pour des chutes de pouvoir. L’assistance murmure des secrets nets, mobilisant des canaux multiples pour une execution immediate. Les retraits s’executent avec une furtivite remarquable, malgre cela des largesses gratuites supplementaires boosteraient les operations. En apotheose mafieuse, Mafia Casino forge une legende de jeu gangster pour les conspirateurs de victoires rusees ! En plus l’interface est un repaire navigable avec ruse, infuse une essence de mystere mafieux.
casino mafia france|
Откройте для себя удивительный ассортимент детских товаров, которые подарят радость и комфорт вашему малышу!
Для тех, кто ищет информацию по теме “Лучшие детские товары: здоровье и счастье с TykePop”, там просто кладезь информации.
Ссылка ниже:
https://tykepop.ru
Ждем вас снова, чтобы рассказать еще больше о наших продуктах и предложениях для малышей.
If you are looking to post free classifieds in India online, we highly recommend Xpdea Classifieds. Xpdea is India’s leading free online ads posting site.
Je suis allie avec Mafia Casino, c’est un empire ou chaque pari scelle un accord de fortune. La reserve est un code de divertissements mafieux, incluant des roulettes pour des tours de table. Le service conspire en continu 24/7, chuchotant des solutions claires et rapides. Les retraits s’executent avec une furtivite remarquable, bien que des rackets de recompense additionnels scelleraient les pactes. Pour clore l’omerta, Mafia Casino invite a une intrigue sans trahison pour les mafiosi des paris crypto ! De surcroit la structure vibre comme un code ancestral, incite a prolonger l’intrigue infinie.
avis sur mafia casino|
Откройте секреты счастливого детства с качественными товарами от TykePop.
Хочу выделить материал про ОШИБКА: Некорректный URL..
Смотрите сами:
https://всеоопт.рф
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Как выбрать лучшее для вашего ребенка? Познакомьтесь с нашим обзором детских товаров, которые не оставят вас равнодушными.
Для тех, кто ищет информацию по теме “Ваш онлайн-гид по здоровью и медицине”, нашел много полезного.
Вот, делюсь ссылкой:
https://idalgogrif.ru
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
If you are looking to post free classifieds in India online, we highly recommend Xpdea Classifieds. Xpdea is India’s leading free online ads posting site.
Website https://beksai.ru/ .
купить старый диплом техникума купить старый диплом техникума .
Откройте секреты счастливого детства с качественными товарами от TykePop.
Особенно понравился материал про Мир мультфильмов: Новости, Обзоры и Сообщество.
Ссылка ниже:
https://obender.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
If you are looking to post free classifieds in India online, we highly recommend Xpdea Classifieds. Xpdea is India’s leading free online ads posting site.
Откройте секреты счастливого детства с качественными товарами от TykePop.
Для тех, кто ищет информацию по теме “Обсуди новинки и тренды в мире криптовалют”, там просто кладезь информации.
Ссылка ниже:
https://reactive.su
Желаем вам и вашим детям приятных покупок и незабываемых моментов с TykePop!
куплю диплом куплю диплом .
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Между прочим, если вас интересует Улучшите психологическое здоровье с Человекологией, загляните сюда.
Вот, делюсь ссылкой:
https://roleresources.ru
Надеемся, наш обзор помог вам сделать правильный выбор. До новых встреч в мире детских товаров!
Ich bin suchtig nach Snatch Casino, es fuhlt sich wie ein Sturm des Vergnugens an. Es gibt eine unglaubliche Vielfalt an Spielen, mit Tausenden von Crypto-freundlichen Spielen. Die Hilfe ist schnell und professionell, antwortet in Sekundenschnelle. Die Auszahlungen sind superschnell, obwohl mehr variierte Boni waren toll. Zum Schluss Snatch Casino ist eine au?ergewohnliche Plattform fur Crypto-Liebhaber ! Daruber hinaus die Site ist stylish und schnell, was das Spielvergnugen steigert.
snatch casino гѓ—гѓгѓўг‚ігѓјгѓ‰ 2024|
Порадуйте себя и своего ребенка отличными товарами от TykePop — уникальными, практичными и безопасными.
По теме “Лучшие приключения и советы для путешественников”, там просто кладезь информации.
Вот, можете почитать:
https://tourismis.ru
Благодарим за внимание, и пусть ваши детки всегда будут здоровы и счастливы вместе с TykePop!
Estou viciado em Flabet Casino, parece um turbilhao de prazer. O catalogo e simplesmente gigantesco, incluindo jogos de mesa dinamicos. A assistencia e rapida e profissional, oferecendo solucoes precisas. Os saques sao super rapidos, as vezes mais rodadas gratis seriam um plus. Em conclusao, Flabet Casino e obrigatorio para os jogadores para os jogadores em busca de diversao ! Por outro lado o site e estiloso e rapido, facilita a experiencia geral.
baixar app flabet|
linebet apk free download
самый точный прогноз на футбол сегодня https://www.kompyuternye-prognozy-na-futbol23.ru .
Website https://church-bench.ru/ .
Для жителей Мытищ доступна ночная доставка алкоголя, что делает возможным получение напитков прямо на пороге собственного дома.
становится все более популярной услугой среди жителей и гостей города. Это связано с растущим спросом на быструю и качественную доставку. За счет увеличения числа компаний, предлагающих такие услуги жители Мытищ могут получить алкогольные напитки прямо на свой порог .
В этом контексте бизнес, связанный с доставкой товаров играют ключевую роль. Они предлагают разнообразные позиции и акции , что делает процесс приобретения товаров максимально комфортным для клиентов. Благодаря эффективному менеджменту и контролю качества , доставка алкоголя в Мытищах становится нормой жизни .
Доставка алкоголя в Мытищах имеет ряд значительных плюсов . Во-первых, основным достоинством является быстрота доставки, поскольку клиенты могут заказывать алкоголь в любое время дня и ночи . Во-вторых, возможность заказать товары онлайн обеспечивает удобство и комфорт .
Кроме того, ассортимент товаров на сайте или в мобильном приложении обычно предлагает больше разнообразия по сравнению с традиционными магазинами . Это дает возможность выбрать из большего количества позиций . Благодаря постоянному улучшению качества обслуживания, цены на доставку алкоголя в Мытищах становятся все более доступными .
Условия и стоимость доставки алкоголя в Мытищах варьируются в зависимости от компании . Как правило, сумма, необходимая для оформления доставки составляет определенную сумму, зависящую от политики магазина . Кроме того, время доставки зависит от ряда факторов и зависят от выбранного способа доставки .
Некоторые компании включают стоимость доставки в цену товара . Это делает процесс заказа еще более привлекательным . При этом необходимо?ательно изучать информацию о доставке на сайте или в приложении .
Заключая, доставка алкоголя в Мытищах обладает большим потенциалом для развития. Благодаря комбинации технологий, логистики и удобного интерфейса , этот рынок продолжит расти и развиваться . В перспективе, возрастет роль персонализации и автоматизации в процессе доставки, что еще больше повысит качество услуг .
В связи с этим, компании, занимающиеся доставкой алкоголя в Мытищах должны совершенствовать свою стратегию и тактику . Это позволит им оставаться конкурентоспособными . Благодаря совместным усилиям всех участников рынка , доставка алкоголя в Мытищах станет еще более удобной и доступной .
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Зацепил материал про Обзоры и история брендов часов: новости и руководства.
Ссылка ниже:
https://buytime.ru
С TykePop ваши дети получают только самое лучшее. Берегите их здоровье и счастье с нашими товарами.
J’eprouve une loyaute infinie pour Mafia Casino, ca eleve le jeu a un niveau de boss legendaire. Les operations forment un plan de manigances innovantes, proposant des crash pour des chutes de pouvoir. Le suivi protege avec une omerta absolue, accessible par message code ou appel direct. Les butins affluent via Bitcoin ou Ethereum, bien que des largesses gratuites supplementaires boosteraient les operations. Pour clore l’omerta, Mafia Casino invite a une intrigue sans trahison pour les mafiosi des paris crypto ! En pot-de-vin supplementaire la circulation est instinctive comme un chuchotement, incite a prolonger l’intrigue infinie.
mafia casino download for android|
Если вы ищете удобный и быстрый способ получить напитки, воспользуйтесь услугой алкоголь доставка пушкино, которая работает без выходных и перерывов, чтобы любой вечер или праздник был полон радости и хорошего настроения.
обеспечивает быструю и безопасную покупку алкогольных изделий. Эта услуга стала неотъемлемой частью современной жизни, особенно среди молодого населения . Благодаря доставке алкоголя в Пушкино, имеют доступ к широкому ассортименту алкогольных изделий .
Доставка алкоголя в Пушкино осуществляется профессиональными курьерами, которые следят за сохранностью продукции . Компании, предоставляющие эту услугу, работают над улучшением качества своих услуг и расширением ассортимента предлагаемых продуктов . Это позволяет им конкурировать с другими компаниями и привлекать новых клиентов .
Преимущества доставки алкоголя в Пушкино очевидны и многочисленны, начиная от экономии времени и заканчивая удобством . Доставка алкоголя помогает избежать пробок и длинных очередей в магазинах. Благодаря этому сервису, могут выбирать из различных вариантов оплаты и доставки.
Доставка алкоголя в Пушкино позволяет клиентам получать качественные алкогольные изделия без риска покупки поддельных продуктов . Компании, которые занимаются доставкой, работают с проверенными поставщиками, чтобы гарантировать высокое качество напитков.
Заказать доставку алкоголя в Пушкино можно через интернет или по телефону, что делает процесс простым и удобным . Для начала, необходимо выбрать компанию, которая занимается доставкой алкоголя и имеет хорошие отзывы . Затем, может оставить комментарий или специальные инструкции для курьера.
После подтверждения заказа, компания обрабатывает его и направляет курьера для доставки . Курьер осуществляет проверку возраста и личности получателя для обеспечения безопасности.
Будущее доставки алкоголя в Пушкино включает в себя расширение ассортимента предлагаемых продуктов и улучшение качества обслуживания . Компании, занимающиеся доставкой, сотрудничают с известными брендами для того, чтобы предложить эксклюзивные напитки. Это даст им возможность повысить уровень обслуживания и качество доставки .
Доставка алкоголя в Пушкино предполагает сотрудничество с местными предприятиями для создания комплексных предложений. В будущем, смогут рассчитывать на высокий уровень обслуживания и гарантию качества от компаний, занимающихся доставкой алкоголя.
Новые поступления велосипедов в наш магазин kra 40at kraken darknet market kraken darknet ссылка сайт kraken darknet
Лука Модрич азыркы замандын эң мыкты оюнчуларынын бири.Модрич кетсе дагы, анын izi футболдо калат. Лука Модрич оюнду көзөмөлдөөнүн чебери. Лука Модричтин жашына ишенүү кыйын, ал дагы деле чоку формасында. Жаңылык лентасы таза футбол темасында: luka-modric-kg.com. Лука Модрич Хорватия үчүн сыймык.
Модрич менен Кроос — эң мыкты дуэттердин бири. Бул адам чынында эле чыныгы чемпион. Бул оюнчу ар бир клуб үчүн кымбат сыйлык болот. Модрич Интер Майамиге өтсө, абдан кызык болмок.
Для тех, кто ищет удобный способ получить свой любимый напиток, алкоголь на дом круглосуточно становится идеальным решением.
становится все более распространенной среди жителей города. Это связано с увеличением занятости людей , что не позволяет им лично покупать алкоголь . Компании, занимающиеся доставкой алкоголя, обеспечивают клиентов огромным выбором алкоголя.
Доставка алкоголя в Балашихе осуществляется круглосуточно , что удобно для клиентов . Заказ можно сделать через интернет , что делает процесс заказа простым .
Доставка алкоголя в Балашихе предоставляет множество преимуществ для своих клиентов. Одним из основных преимуществ является возможность быстрого получения товара , что имеет большое значение для заказчиков . Кроме того, доставка алкоголя гарантирует качество доставляемых напитков, что важно для сохранения качества напитков .
Доставка алкоголя в Балашихе также позволяет заказчикам не тратить время на походы в магазин, что может быть использовано более продуктивно. Компании, занимающиеся доставкой, ценят каждого своего клиента, что способствует доверию к компании .
Заказать доставку алкоголя в Балашихе не составляет особого труда . Для начала необходимо найти подходящую компанию , что можно сделать по рекомендациям . После выбора компании необходимо открыть веб-сайт и просмотреть имеющийся выбор .
Затем следует сделать заказ , что можно сделать онлайн . После оформления заказа будет произведена оплата , что можно сделать несколькими способами . Компания затем доставит заказ .
Доставка алкоголя в Балашихе является очень удобной услугой . Она сaves время , предлагает широкий ассортимент напитков и обеспечивает качество доставляемых товаров . Компании, занимающиеся доставкой, стараются улучшить свои услуги , что способствует развитию рынка .
В заключение, доставка алкоголя в Балашихе является перспективной услугой . Ее можно легко заказать , и она предоставляет множество преимуществ для клиентов. Таким образом, доставка алкоголя будет и дальше совершенствоваться.
Для получения быстрой и удобной алкоголь 24 в любое время суток, включая ночное время, можно воспользоваться онлайн-сервисом, предлагающим широкий выбор напитков и удобную систему оплаты.
Доставка алкоголя в Люберцах является очень популярной услугой среди местных жителей . Это связано с тем, что люди предпочитают заказывать алкоголь онлайн и получать его прямо на дом . Кроме того, доставка алкоголя в Люберцах позволяет избежать длинных очередей и тратить меньше времени на покупку .
В Люберцах работает большое количество компаний, предлагающих доставку алкоголя . Каждая компания имеет свою стратегию и подход к клиентам, включая гибкие цены и быструю доставку . Это позволяет заказчикам иметь широчайший выбор при заказе алкоголя.
Услуги доставки алкоголя в этом регионе предлагают ряд преимуществ . Одним из основных преимуществ является возможность заказать алкоголь без выхода из дома, что особенно удобно в холода или плохую погоду . Кроме того, компании доставки алкоголя в Люберцах часто предлагают скидки и акции, что делает покупку более выгодной .
Кроме того, доставка алкоголя в Люберцах может быть особенно полезной в особых случаях . Например, можно заказать алкоголь в качестве подарка для друзей или близких, не выходя из дома . Это позволяет людям получать алкоголь быстро и без проблем.
Процесс заказа доставки алкоголя в этом регионе очень прост . Для этого необходимо выбрать желаемый алкогольный напиток и указать адрес доставки. После этого компания предложит варианты оплаты, подходящие для клиента.
При выборе компании стоит обратить внимание на отзывы и рекомендации других клиентов . Это помогает клиенту сделать правильный выбор. Кроме того, необходимо проверить информацию о компании и ее деятельности.
Услуги доставки алкоголя в этом регионе набирают популярность thanks kepada своей удобности . Это упрощает жизнь людей, которые ценят комфорт и удобство. Кроме того, услуги доставки помогают создать праздничную атмосферу, без необходимости личного присутствия в магазине .
В заключении можно сказать, что доставка алкоголя в Люберцах является востребованной услугой . Это дает возможность людям получать алкоголь быстро и без проблем, не выходя из дома. Кроме того, этот сектор рынка будет дальше развиваться и предлагать новые решения .
Мы предлагаем доставка алкоголя москва 24/7 с оперативной и точной доставкой по Москве и области.
Доставка алкогольных напитков становится все более популярной услугой в современном мире. Это связано с тем, что люди все больше ценят удобство и комфорт, и предпочитают заказывать алкоголь онлайн.
Доставка алкоголя также позволяет людям сэкономить время и нервы.
Люди могут выбрать тип доставки, который лучше всего подходит их образу жизни и привычкам.
Это особенно удобно для людей, которые предпочитают проводить время дома.
Вас интересуют лучшие товары для детей? Узнайте, почему продукция от TykePop заслуживает вашего внимания.
Для тех, кто ищет информацию по теме “Объясняем сложные научные термины просто”, там просто кладезь информации.
Смотрите сами:
https://easyterm.ru
Будем рады вашим отзывам и впечатлениям о товарах TykePop! Делитесь с нами своими идеями и вдохновением.
black porno
Backlinks SEO promotion
1. Взаимосвязанные backlinks (с целью улучшения индексирования).
2. Переходы посредством Google-редиректов.
3. Ссылки через редиректы с доверенных сайтов.
– Отправляю отчет о выполнении с помощью .txt-документа с перечнем успешных размещений.
супер прогнозы на футбол https://kompyuternye-prognozy-na-futbol24.ru .
Je suis pactise avec Mafia Casino, ca eleve le jeu a un niveau de boss legendaire. Il pullule d’une legion de complots interactifs, avec des slots aux themes gangster qui font chanter les rouleaux. Le support client est un consigliere vigilant et incessant, chuchotant des solutions claires et rapides. Les flux sont masques par des voiles crypto, a l’occasion des rackets de recompense additionnels scelleraient les pactes. Dans l’ensemble du domaine, Mafia Casino invite a une intrigue sans trahison pour les gardiens des empires numeriques ! De surcroit le graphisme est un complot dynamique et immersif, incite a prolonger l’intrigue infinie.
mafia casino retrait|
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
Хочу выделить раздел про Как выбрать идеальные ножи для резьбы по дереву.
Вот, делюсь ссылкой:
https://fixora.ru/%d0%ba%d0%b0%d0%ba-%d0%b2%d1%8b%d0%b1%d1%80%d0%b0%d1%82%d1%8c-%d0%bd%d0%be%d0%b6%d0%b8-%d0%b4%d0%bb%d1%8f-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
Модричтин карьерасы укмуштуу, ар бир оюну тарых.Көпчүлүк күйөрмандар Модричтин кетишине ишенбей жатат. Анын карьерасынын узактыгы профессионалдуулуктун белгиси. Модричтин энергиясы таң калтырат. Жашы, формасы, рекорддору тууралуу толук маалымат: Лука Модрич возраст. Хорватиянын эң атактуу оюнчусу дал ушул Модрич.
Алар бирге көптөгөн ЛЧ жеңиштерин алып келишкен. Модрич жаш кезинен эле футболго берилген. Модрич акчаны эмес, атакты тандаган адам. Эми ал Миланга өтөт деген ушак бар.
Ich habe einen totalen Hang zu SpinBetter Casino, es liefert ein Abenteuer voller Energie. Das Angebot an Spielen ist phanomenal, mit Spielen, die fur Kryptos optimiert sind. Der Support ist 24/7 erreichbar, bietet klare Losungen. Der Ablauf ist unkompliziert, trotzdem zusatzliche Freispiele waren ein Highlight. Global gesehen, SpinBetter Casino bietet unvergessliche Momente fur Casino-Liebhaber ! Zusatzlich das Design ist ansprechend und nutzerfreundlich, was jede Session noch besser macht. Ein weiterer Vorteil die schnellen Einzahlungen, die Flexibilitat bieten.
https://spinbettercasino.de/|
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
Для тех, кто ищет информацию по теме “Как выбрать лучшие кисти для акварели?”, есть отличная статья.
Вот, делюсь ссылкой:
https://fixora.ru/%d0%ba%d0%b8%d1%81%d1%82%d0%b8-%d0%b4%d0%bb%d1%8f-%d0%b0%d0%ba%d0%b2%d0%b0%d1%80%d0%b5%d0%bb%d0%b8/
Удачи вам в плетении и вдохновения от наших мастеров!
У нас вы найдете актуальные стоимость шиномонтажа, которые помогут вам с выбором услуг в нашем сервисе.
Расценки на услуги шиномонтажа могут различаться по многим причинам.
Анын статистикасын карасаң, чыныгы легенда экенин түшүнөсүң.Көпчүлүк күйөрмандар Модричтин кетишине ишенбей жатат. Лука Модрич оюнду көзөмөлдөөнүн чебери. Лука Модричтин жашына ишенүү кыйын, ал дагы деле чоку формасында. Модрич тууралуу фактыларды текшерип көр: Лука Модрич статистика. Лука Модрич дүйнөлүк футболго башкача дем берди.
Алар бирге көптөгөн ЛЧ жеңиштерин алып келишкен. Модрич согуш жылдарында чоңойгон, бирок футбол аны сактап калды. Модрич акчадан мурда сыймыкты ойлойт. Кайда барбасын, ал ар дайым легенда бойдон калат.
papamasque – This brand feels mysterious, creative, and genuinely intriguing for curious visitors.
Добро пожаловать в мир плетения корзин из лозы, где каждый сможет найти советы от признанных мастеров!
Особенно понравился раздел про Эффективный уход за инструментами для резьбы.
Вот, можете почитать:
https://fixora.ru/%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%bf%d0%be-%d1%83%d1%85%d0%be%d0%b4%d1%83-%d0%b7%d0%b0-%d0%b8%d0%bd%d1%81%d1%82%d1%80%d1%83%d0%bc%d0%b5%d0%bd%d1%82%d0%b0%d0%bc%d0%b8-%d0%b4%d0%bb%d1%8f-%d1%80/
Удачи вам в плетении и вдохновения от наших мастеров!
Футболдо мындай оюнчу сейрек кездешет, Модрич өзгөчө.Көпчүлүк күйөрмандар Модричтин кетишине ишенбей жатат. Лука Модрич статистика дайыма жогорку деңгээлде. Анын жашы эмес, оюну аны аныктайт. Жаңыдан таанышып жаткандар үчүн кыска очерктер жана гиддер: luka-modric-kg.com. Хорватиянын эң атактуу оюнчусу дал ушул Модрич.
Анын Реалдагы карьерасы алтын барактар менен жазылган. Лука Модрич жашоодон сабак алуунун үлгүсү. Анын эмгеги ар тыйынга татыктуу. Футбол дүйнөсү Модричсиз элестетүү кыйын.
Ich bin abhangig von SpinBetter Casino, es liefert ein Abenteuer voller Energie. Es gibt eine unglaubliche Auswahl an Spielen, mit Spielen, die fur Kryptos optimiert sind. Der Support ist 24/7 erreichbar, immer parat zu assistieren. Der Ablauf ist unkompliziert, trotzdem zusatzliche Freispiele waren ein Highlight. Alles in allem, SpinBetter Casino ist ein Muss fur alle Gamer fur Krypto-Enthusiasten ! Daruber hinaus die Interface ist intuitiv und modern, gibt den Anreiz, langer zu bleiben. Ein weiterer Vorteil die schnellen Einzahlungen, die Flexibilitat bieten.
https://spinbettercasino.de/|
Ich liebe die Atmosphare von NV Casino, es ist ein Abenteuer, das pulsiert wie ein Herzschlag. Das Angebot an Spielen ist phanomenal, inklusive aufregender Sportwetten. Die Mitarbeiter reagieren blitzschnell, erreichbar zu jeder Stunde. Der Prozess ist unkompliziert, ab und zu mehr abwechslungsreiche Boni waren willkommen. Zusammengefasst, NV Casino bietet unvergesslichen Spa? fur Krypto-Liebhaber ! Daruber hinaus die Navigation ist kinderleicht, verstarkt die Immersion.
playnvcasino.de|
новости футбола новости футбола .
Наша юридическая практика сфокусирована на защите прав водителей. Основные услуги включают возмещение ущерба от страховых компаний. Каждый юрист имеет успешную судебную практику. Наша работа позволяет сохранить ваше время и ресурсы. Узнайте больше о возможностях юридической защиты. https://avtouristvspb.ru/
наркологическая служба https://www.narkologicheskaya-klinika-20.ru .
Задумываетесь над плетением корзин? Узнайте, что советуют опытные мастера!
По теме “Советы мастеров по плетению корзин из лозы”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://fixora.ru/%d0%b8%d0%bd%d1%81%d1%82%d1%80%d1%83%d0%bc%d0%b5%d0%bd%d1%82%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%ba%d0%be%d1%80%d0%b7%d0%b8%d0%bd-%d0%b8%d0%b7-%d0%bb%d0%be/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
лицензия нарколога на дом http://narkolog-na-dom-1.ru .
porno
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Между прочим, если вас интересует Советы по плетению корзин для экспертов, загляните сюда.
Вот, можете почитать:
https://fixora.ru/%d1%82%d0%b5%d1%85%d0%bd%d0%b8%d0%ba%d0%b8-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%ba%d0%be%d1%80%d0%b7%d0%b8%d0%bd-%d0%b4%d0%bb%d1%8f-%d0%bf%d1%80%d0%be%d0%b4%d0%b2%d0%b8%d0%bd%d1%83/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
спортивные события https://novosti-sporta-7.ru/ .
Acho incrivel Flabet Casino, proporciona uma aventura palpitante. O escolha de titulos e enorme, fornecendo sessoes ao vivo imersivas. A assistencia e rapida e profissional, respondendo em um piscar de olhos. Os pagamentos sao fluidos e seguros, mesmo que gostaria de mais bonus variados. Em conclusao, Flabet Casino e obrigatorio para os jogadores para aqueles que gostam de criptomoedas ! Por outro lado a navegacao e super facil, facilita a experiencia geral.
como jogar na flabet|
Ich bin total fasziniert von Snatch Casino, es bietet einen einzigartigen Thrill. Die Auswahl an Titeln ist riesig, mit immersiven Live-Sitzungen. Die Agenten sind super reaktionsschnell, erreichbar jederzeit. Die Auszahlungen sind superschnell, jedoch haufigere Promos waren cool. Zusammenfassend Snatch Casino lohnenswert fur Online-Wetten-Enthusiasten ! Hinzu kommt das Design ist ansprechend und intuitiv, macht jede Session immersiv.
snatch casino 50 freespins|
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Между прочим, если вас интересует Секреты и вдохновение мастера резьбы по дереву, посмотрите сюда.
Вот, можете почитать:
https://fixora.ru/%d0%b8%d0%bd%d1%82%d0%b5%d1%80%d0%b2%d1%8c%d1%8e-%d1%81-%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80%d0%be%d0%bc-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
hellgate100nyc – A much-needed solution for artists seeking to prove their work’s authenticity.
redhillrepurposing – The platform’s design is clean and user-friendly.
ouretiquette – I appreciate the transparency this site offers to artists and buyers.
colossal-heart – Love how they’re combining technology with art authenticity.
shopmaggielindemann – I appreciate the transparency this site offers to artists and buyers.
alixrice – This could really streamline the process of art authentication.
blegacyfarms – Excited to see how this evolves in the art community.
aworldofgin – Love how they’re combining technology with art authenticity.
Мы занимаемся юридическим сопровождением для автовладельцев. Основные направления включают споры со страховыми компаниями. Мы добиваемся законного решения в сложных дорожных ситуациях. Обращение к нам дает возможность получить профессиональную защиту. https://avtouristvspb.ru/
зайти на сайт кракен сайт
Хотите блеснуть своим мастерством лозоплетения? Воспользуйтесь советами профессионалов!
Хочу выделить раздел про Преимущества и выбор керамических ножей в 2024 году.
Вот, можете почитать:
https://fixora.ru/%d0%ba%d0%b5%d1%80%d0%b0%d0%bc%d0%b8%d1%87%d0%b5%d1%81%d0%ba%d0%b8%d0%b9-%d0%bd%d0%be%d0%b6/
Надеемся, эти советы помогут вам в создании великолепных корзин из лозы.
Adoro completamente Flabet Casino, e uma experiencia vibrante. O catalogo e simplesmente gigantesco, fornecendo sessoes ao vivo imersivas. Os agentes sao ultra-responsivos, garantindo ajuda instantanea. As transacoes sao confiaveis, as vezes as ofertas poderiam ser mais generosas. No geral, Flabet Casino e uma plataforma excepcional para os amantes de adrenalina ! Ademais a plataforma e visualmente top, o que aumenta o prazer de jogar.
reclame aqui flabet|
Ich liebe absolut Snatch Casino, es liefert ein aufregendes Abenteuer. Der Katalog ist einfach gigantisch, mit dynamischen Tischspielen. Die Agenten sind super reaktionsschnell, antwortet in Sekundenschnelle. Die Transaktionen sind zuverlassig, gelegentlich haufigere Promos waren cool. Insgesamt Snatch Casino bietet garantiertes Vergnugen fur Online-Wetten-Enthusiasten ! Au?erdem die Plattform ist visuell top, erleichtert die Gesamterfahrung.
snatch casino test|
islingtondesigndistrict – It’s refreshing to see innovation in the art world like this.
Добро пожаловать в мир плетения корзин из лозы, где каждый сможет найти советы от признанных мастеров!
Для тех, кто ищет информацию по теме “Эффективные советы для начинающих резчиков”, там просто кладезь информации.
Ссылка ниже:
https://fixora.ru/%d0%bf%d0%be%d0%bb%d0%b5%d0%b7%d0%bd%d1%8b%d0%b5-%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bd%d0%b0%d1%87%d0%b8%d0%bd%d0%b0%d1%8e%d1%89%d0%b8%d1%85-%d1%80%d0%b5%d0%b7%d1%87%d0%b8/
Надеемся, эти советы помогут вам в создании великолепных корзин из лозы.
theberserkeriscoming – Excited to see how this evolves in the art community.
новости футбольных клубов http://www.novosti-sporta-8.ru .
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
По теме “Как выбрать идеальные ножи для резьбы по дереву”, есть отличная статья.
Вот, можете почитать:
https://fixora.ru/%d0%ba%d0%b0%d0%ba-%d0%b2%d1%8b%d0%b1%d1%80%d0%b0%d1%82%d1%8c-%d0%bd%d0%be%d0%b6%d0%b8-%d0%b4%d0%bb%d1%8f-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
Забудьте раз и навсегда о утомительных поисков, где бы смотреть фильмы без проблем. Ваш путь лежит сюда на КИНОГО (https://kinogo-ke1.sbs/). В каталоге сайта можно найти самые свежие кинопремьеры 2025 года. Функционирование платформы Kinogo построена на принципах бесплатности, гарантируя высокое качество трансляции и отсутствие регистрации.
ноги для собак купить лакомства – Общий запрос на покупку лакомств. Необходимо уточнять для кого, чтобы получить более релевантные результаты. В данном контексте подразумеваются лакомства для животных.
Мен ар дайым Лука Модричти көргөндө чыныгы лидерликти байкайм.Лука Модрич Реалдын жүрөгү болгон. Лука Модрич канча гол киргизгенин билесиңби? Модрич ар бир оюнда жаш оюнчулардай күрөшөт. Ийгиликтер тарыхын окуп шыктанып ал: Лука Модрич биография. Хорват футболунун жандуу легендасы.
Анын Реалдагы карьерасы алтын барактар менен жазылган. Бул адам чынында эле чыныгы чемпион. Лука Модричтин айлык маянасы укмуш. Модрич Интер Майамиге өтсө, абдан кызык болмок.
нажмите здесь кракен купить
redhillrepurposing – I appreciate the transparency this site offers to artists and buyers.
натуральные лакомства для собак Кость для собаки – это не только лакомство, но и игрушка, которая может занять питомца на долгое время. Выбор кости зависит от размера и породы собаки, а также от ее привычек и предпочтений.
медсестра которая купила диплом врача http://www.frei-diplom13.ru .
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Для тех, кто ищет информацию по теме “Эффективный уход за инструментами для резьбы”, нашел много полезного.
Вот, можете почитать:
https://fixora.ru/%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%bf%d0%be-%d1%83%d1%85%d0%be%d0%b4%d1%83-%d0%b7%d0%b0-%d0%b8%d0%bd%d1%81%d1%82%d1%80%d1%83%d0%bc%d0%b5%d0%bd%d1%82%d0%b0%d0%bc%d0%b8-%d0%b4%d0%bb%d1%8f-%d1%80/
Удачи вам в плетении и вдохновения от наших мастеров!
ouretiquette – Just explored this site; the concept of art verification is intriguing.
hellgate100nyc – Love how they’re combining technology with art authenticity.
colossal-heart – Just explored this site; the concept of art verification is intriguing.
узнать больше Здесь кракен купить
Узнать больше kra40 at
Je suis allie avec Mafia Casino, on complote un reseau de tactiques astucieuses. La cache de jeux est un arsenal cache de plus de 5000 armes, offrant des cashbacks 15% et VIP 5 niveaux des capos comme Evolution et Pragmatic Play. Le suivi protege avec une omerta absolue, accessible par message code ou appel direct. Le protocole est ourdi pour une fluidite exemplaire, bien que des rackets de recompense additionnels scelleraient les pactes. En scellant le pacte, Mafia Casino invite a une intrigue sans trahison pour ceux qui ourdissent leur destin en ligne ! En pot-de-vin supplementaire la structure vibre comme un code ancestral, infuse une essence de mystere mafieux.
mafia casino online|
Хотите блеснуть своим мастерством лозоплетения? Воспользуйтесь советами профессионалов!
По теме “Эффективные советы для начинающих резчиков”, там просто кладезь информации.
Ссылка ниже:
https://fixora.ru/%d0%bf%d0%be%d0%bb%d0%b5%d0%b7%d0%bd%d1%8b%d0%b5-%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bd%d0%b0%d1%87%d0%b8%d0%bd%d0%b0%d1%8e%d1%89%d0%b8%d1%85-%d1%80%d0%b5%d0%b7%d1%87%d0%b8/
Удачи вам в плетении и вдохновения от наших мастеров!
shopmaggielindemann – The platform’s design is clean and user-friendly.
правила вывода 1win http://1win5516.ru
alixrice – A much-needed solution for artists seeking to prove their work’s authenticity.
ankara online diyetisyen
Задумываетесь над плетением корзин? Узнайте, что советуют опытные мастера!
Кстати, если вас интересует Как выбрать идеальную лозу для плетения, посмотрите сюда.
Ссылка ниже:
https://fixora.ru/%d1%80%d1%83%d0%ba%d0%be%d0%b2%d0%be%d0%b4%d1%81%d1%82%d0%b2%d0%be-%d0%bf%d0%be-%d0%b2%d1%8b%d0%b1%d0%be%d1%80%d1%83-%d0%bb%d0%be%d0%b7%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd/
Никогда не прекращайте учиться и совершенствоваться, ведь каждый день — это новый шаг в искусстве плетения!
Удобные городские велосипеды по акции kraken ссылка зеркало kraken darknet market kraken darknet ссылка сайт kraken darknet
https://kiteschoolhurghada.ru/
Ich bin fasziniert von SpinBetter Casino, es liefert ein Abenteuer voller Energie. Die Titelvielfalt ist uberwaltigend, mit Spielen, die fur Kryptos optimiert sind. Der Service ist von hoher Qualitat, bietet klare Losungen. Die Transaktionen sind verlasslich, obwohl mehr abwechslungsreiche Boni waren super. Zusammengefasst, SpinBetter Casino ist absolut empfehlenswert fur Spieler auf der Suche nach Action ! Nicht zu vergessen die Navigation ist kinderleicht, was jede Session noch besser macht. Ein weiterer Vorteil die Sicherheit der Daten, die das Spielen noch angenehmer machen.
spinbettercasino.de|
blegacyfarms – The idea of a global art registry feels like a game-changer.
Ich habe eine Leidenschaft fur NV Casino, es bietet eine Reise voller Spannung. Das Angebot an Spielen ist phanomenal, inklusive aufregender Sportwetten. Die Hilfe ist effizient und professionell, bietet klare Antworten. Die Gewinne kommen ohne Verzogerung, manchmal mehr abwechslungsreiche Boni waren willkommen. Zum Abschluss, NV Casino bietet unvergesslichen Spa? fur Adrenalin-Junkies ! Zusatzlich das Design ist modern und ansprechend, fugt eine Prise Magie hinzu.
https://playnvcasino.de/|
aworldofgin – Excited to see how this evolves in the art community.
Вас интересуют природные богатства России? Давайте исследуем их вместе!
Зацепил материал про Изучение ООПТ России: парки, заповедники, водоемы.
Вот, можете почитать:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
спортивные новости https://sport-novosti-2.ru/ .
официальный сайт ПокерОК
играть на сайте ПокерОК
нажмите, чтобы подробнее кракен клир
Ich bin komplett hin und weg von SpinBetter Casino, es ist eine Erfahrung, die wie ein Wirbelsturm pulsiert. Der Katalog ist reichhaltig und variiert, mit aufregenden Sportwetten. Der Service ist von hoher Qualitat, mit praziser Unterstutzung. Die Gewinne kommen prompt, ab und an mehr abwechslungsreiche Boni waren super. Zum Ende, SpinBetter Casino garantiert hochsten Spa? fur Adrenalin-Sucher ! Daruber hinaus die Site ist schnell und stylish, fugt Magie hinzu. Hervorzuheben ist die mobilen Apps, die Vertrauen schaffen.
spinbettercasino.de|
Ich habe eine Leidenschaft fur NV Casino, es erzeugt eine Energie, die suchtig macht. Die Vielfalt der Titel ist atemberaubend, mit Slots im innovativen Design. Der Support ist von herausragender Qualitat, immer bereit zu helfen. Der Prozess ist unkompliziert, trotzdem mehr abwechslungsreiche Boni waren willkommen. Zusammengefasst, NV Casino ist eine Plattform, die rockt fur Krypto-Liebhaber ! Nicht zu vergessen die Site ist schnell und elegant, macht die Erfahrung flussiger.
playnvcasino.de|
Откройте для себя прекрасные и загадочные места, которые находятся под охраной в нашей стране.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://alloopt.ru
Спасибо за внимание! Надеюсь, вам было интересно.
прогнозы на спорт бесплатно от профессионалов на сегодня http://prognozy-ot-professionalov5.ru .
Aumentará la confianza en el sitio web
Nivel de autoridad del dominio (DR de Ahrefs)
Aumentará la reputación en el sitio web.
El lugar de tu sitio web es esencial para el SEO.
Nos dedicamos a atraer arañas de búsqueda de Google a tu sitio para aumentar su visibilidad.
Existen dos clases básicas de bots de Google:
Bots de rastreo – los que analizan inicialmente el sitio.
Robots de indexado – actúan según las órdenes de los bots de rastreo.
Cuantos más accesos hagan estos robots a tu sitio, mayor será tu visibilidad.
Antes de comenzar, te proporcionaremos una prueba visual del Domain Rating desde Ahrefs.
Después de concluir el trabajo, también tendrás una muestra nueva del nivel de tu sitio en Ahrefs.
Pago basado en resultados.
Duración prevista: de poco más de una semana.
Trabajamos con sitios de hasta DR 50.
Para procesar tu pedido necesitamos:
El link de tu sitio.
Un término principal.
Este servicio no se aplica a redes sociales.
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
Между прочим, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, загляните сюда.
Смотрите сами:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
Представляем вашему вниманию национальные парки и заповедники России.
Между прочим, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, загляните сюда.
Смотрите сами:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
I think that what you posted was very reasonable. But, consider this, suppose you wrote a catchier post title? I mean, I don’t wish to tell you how to run your website, however suppose you added a post title that makes people desire more? I mean %BLOG_TITLE% is kinda boring. You ought to glance at Yahoo’s front page and see how they create article headlines to grab people interested. You might add a video or a picture or two to get readers interested about what you’ve written. In my opinion, it might make your blog a little bit more interesting.
https://centerv.com.ua/yak-obraty-steklo-far-dlya-pokrashchennya-vydymost.html
Если вы ищете качественные зимняя резина шипованная, то наш магазин предлагает широкий ассортимент зимних шин по доступным ценам.
созданную для того, чтобы автомобиль мог легко ориентироваться на дороге в суровых зимних условиях . Эта конструкция оснащена шипами, увеличивающие коэффициент сцепления с дорогой, тем самым повышая безопасность . Использование зимних шин шипованных становится особенно актуальным в регионах с холодным климатом, где обильные снегопады и морозы создают опасные условия для вождения .
Зимние шины шипованные являются обязательным атрибутом для многих автолюбителей, живущих в регионах с суровыми зимами . Они обеспечивают повышенную трение и снижение риска заноса . Кроме того, зимние шины шипованные созданы для использования в экстремальных условиях .
Использование зимних шин шипованных имеет множество преимуществ, включая улучшение сцепления с дорогой и снижение риска заноса . Зимние шины шипованные снижают риск скidding и потери управления автомобилем . Кроме того, зимние шины шипованные обеспечивают автомобилистам спокойствие и уверенность на дороге .
Зимние шины шипованные также подходят для использования в различных условиях, включая дождь, снег и мороз . Они позволяют автомобилю сохранять стабильность и управляемость на дороге . Использование зимних шин шипованных повышает общую безопасность и снижает риск аварий на дороге .
Существует несколько типов зимних шин шипованных, предназначенных для различных типов автомобилей и условий эксплуатации . Зимние шины шипованные могут быть разделены на категории по степени агрессивности их протектора . Кроме того, зимние шины шипованные могут быть разработаны для использования на конкретных типах автомобилей, таких как легковые или грузовые автомобили .
Зимние шины шипованные также могут быть оснащены дополнительными функциями, такими как система мониторинга давления или системы помощи при торможении . Использование зимних шин шипованных обеспечивает автомобилистам спокойствие и уверенность на дороге . Зимние шины шипованные являются обязательным атрибутом для многих автолюбителей .
Использование зимних шин шипованных является важным элементом безопасности на дороге, позволяя водителям чувствовать себя более уверенно и безопасно на дороге . Зимние шины шипованные разработаны для того, чтобы сохранять свои properties даже при очень низких температурах . Кроме того, зимние шины шипованные обеспечивают автомобилистам спокойствие и уверенность на дороге .
Зимние шины шипованные являются обязательным атрибутом для многих автолюбителей . Использование зимних шин шипованных обеспечивает автомобилистам спокойствие и уверенность на дороге . В заключении, зимние шины шипованные позволяют водителям чувствовать себя более уверенно и безопасно на дороге .
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, нашел много полезного.
Вот, можете почитать:
https://alloopt.ru
Спасибо за внимание! Надеюсь, вам было интересно.
диплом техникума купить в диплом техникума купить в .
У нас вы найдете актуальные шиномонтаж расценки, которые помогут вам с выбором услуг в нашем сервисе.
Эти факторы включают в себя тип и размер колес, а также выбранный сервисный центр.
1win бонусы http://www.1win5516.ru
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
Кстати, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, загляните сюда.
Смотрите сами:
https://alloopt.ru
Спасибо за внимание! Надеюсь, вам было интересно.
футбол завтра прогнозы на матчи http://www.kompyuternye-prognozy-na-futbol23.ru .
официальный сайт ПокерОК
играть на сайте ПокерОК
I’m drawn to Wazamba Casino, it provides a thrilling journey. The array of titles is vast, including slots with tribal themes. Plus 200 free spins to start strong. Customer support is outstanding. Payments are secure and reliable, however additional bonuses might be welcome. To sum up, Wazamba Casino delivers top-tier gaming for adrenaline seekers ! Additionally the platform is visually stunning, simplifies the overall experience. Worth noting collecting artifacts for rewards, elevating the engagement.
https://wazambagr.com/|
J’ai un vrai coup de c?ur pour Bingoal Casino, ca transporte dans un monde captivant. Il y a une multitude de jeux excitants, avec des slots innovants et thematiques. Accompagne de paris gratuits. Le suivi client est irreprochable, avec une aide precise et rapide. Les transactions sont fiables et rapides, de temps en temps des bonus plus varies seraient bienvenus. Dans l’ensemble, Bingoal Casino est un incontournable pour les joueurs pour les fans de casino en ligne ! Ajoutons que le site est rapide et attrayant, facilite une immersion totale. Un autre atout majeur les options de paris sportifs variees, renforce le sentiment de communaute.
Regarder à l’intérieur|
Je suis hypnotise par Bingoal Casino, il procure une odyssee incomparable. La gamme des titres est stupefiante, comprenant des jeux optimises pour les cryptos. Pour un lancement puissant. Le service est operationnel 24/7, toujours pret a intervenir. Les retraits sont realises promptement, de temps a autre des incitations additionnelles seraient un benefice. En fin de compte, Bingoal Casino est essentiel pour les amateurs pour les adeptes de sensations intenses ! Par ailleurs l’interface est intuitive et raffinee, ajoute un confort notable. A souligner aussi les evenements communautaires captivants, propose des recompenses permanentes.
Regarder maintenant|
Летние скидки на все модели велосипедов kraken актуальные ссылки kraken маркетплейс зеркало кракен ссылка кракен даркнет
официальный сайт ПокерОК
Официальный сайт онлайн рума ПокерОК
металлические стеллажи Надежные металлические стеллажи для склада от производителя «Металлоизделия» Организуйте складское пространство с максимальной эффективностью! Компания «Металлоизделия» предлагает профессиональные металлические стеллажи для складов любого размера и назначения. Наши стеллажи для склада — это идеальное решение для хранения товаров, оборудования, архивов и материалов. Они позволяют использовать каждый квадратный метр площади по максимуму, обеспечивая легкий доступ к любой единице хранения. Почему выбирают наши стеллажи? Прочность и долговечность: Мы используем высококачественный стальной прокат и усиленные конструкции, выдерживающие значительные нагрузки (до 5000 кг на ячейку и более). Универсальность: Широкая линейка моделей — полочные, паллетные (фронтальные, гравитационные), консольные. Подберем решение под ваши задачи. Безопасность: Все конструкции имеют антикоррозийное покрытие и рассчитаны на многократную сборку-разборку. Строгое соблюдение ГОСТов. Модульность и масштабируемость: Вы можете легко нарастить систему или изменить конфигурацию при расширении склада. Выгодная цена: Работаем без посредников, так как являемся производителем.
ставки на спорт прогнозы хоккей https://luchshie-prognozy-na-khokkej9.ru .
Начнем путешествие по магическим уголкам российских заповедников.
Между прочим, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Вот, делюсь ссылкой:
https://alloopt.ru
Рад был поделиться с вами этой информацией. До новых встреч!
точные прогнозы на футбол на сегодня https://kompyuternye-prognozy-na-futbol24.ru .
I’m drawn to Wazamba Casino, it generates crazy gaming vibes. The selection of games is phenomenal, with sports betting for added thrill. Enhancing your initial experience. Customer support is outstanding. Transactions are hassle-free, occasionally additional bonuses might be welcome. Broadly speaking, Wazamba Casino delivers top-tier gaming for online betting fans ! Moreover the design is engaging and exotic, deepens immersion in the game. Worth noting the loyalty program with masks, fostering a community feel.
wazambagr.com|
Je suis totalement enchante par Bingoal Casino, c’est une plateforme qui foisonne de vigueur. Le repertoire est luxuriant et multifacette, incluant des paris sportifs electrisants. Renforcant l’experience de depart. Le service est operationnel 24/7, proposant des reponses limpides. Les retraits sont realises promptement, bien que des bonus plus diversifies seraient souhaitables. Pour synthetiser, Bingoal Casino est essentiel pour les amateurs pour les enthousiastes de casino en ligne ! En outre la plateforme est esthetiquement remarquable, intensifie le plaisir du jeu. A souligner aussi les options de paris sportifs etendues, propose des recompenses permanentes.
Aller pour les dГ©tails|
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
Между прочим, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Вот, делюсь ссылкой:
https://alloopt.ru
Рад был поделиться с вами этой информацией. До новых встреч!
J’ai une passion debordante pour Locowin Casino, c’est une plateforme qui deborde de vitalite. Les options sont incroyablement vastes, proposant des jeux de table immersifs. Amplifiant l’experience initiale. Le service est disponible 24/7, joignable a tout moment. Les gains arrivent sans retard, cependant quelques tours gratuits supplementaires seraient bienvenus. En bref, Locowin Casino est indispensable pour les joueurs pour les joueurs en quete d’excitation ! De plus l’interface est intuitive et elegante, amplifie le plaisir de jouer. Un avantage supplementaire les options de paris sportifs variees, offre des recompenses continues.
Ouvrir le site maintenant|
J’apprecie l’atmosphere de Locowin Casino, c’est une plateforme qui explose d’energie. La gamme de jeux est spectaculaire, avec des slots au style innovant. Associe a des tours gratuits sans wager. Les agents reagissent avec promptitude, proposant des reponses limpides. Les retraits sont realises promptement, par moments plus de promotions frequentes seraient un atout. Tout compte fait, Locowin Casino est essentiel pour les amateurs pour ceux qui parient en crypto ! En outre le site est veloce et seduisant, ce qui eleve chaque session a un niveau superieur. Un autre avantage cle les evenements communautaires captivants, offre des privileges sur mesure.
DГ©couvrir toutes les infos|
Ich bin absolut hingerissen von NV Casino, es liefert einen einzigartigen Kick. Das Angebot an Spielen ist phanomenal, inklusive aufregender Sportwetten. Der Kundensupport ist hervorragend, mit praziser Unterstutzung. Die Zahlungen sind sicher und flussig, dennoch zusatzliche Freispiele waren toll. Alles in allem, NV Casino ist definitiv empfehlenswert fur Fans von Online-Wetten ! Au?erdem die Navigation ist kinderleicht, fugt eine Prise Magie hinzu.
playnvcasino.de|
Je suis bluffe par Casinia Casino, ca transporte dans un palais enchanteur. Il y a une abondance de jeux captivants, proposant des jeux de table elegants. Plus un Bonus Crab pour demarrer. L’assistance est efficace et courtoise, avec une aide precise. Les transactions sont fiables, cependant quelques tours gratuits supplementaires seraient bienvenus. Pour conclure, Casinia Casino est une plateforme qui regne en maitre pour ceux qui aiment parier en crypto ! De plus la plateforme est visuellement somptueuse, ce qui rend chaque session encore plus royale. Egalement appreciable les paiements securises en crypto, assure des transactions fiables.
DГ©couvrir le contenu|
Je suis entierement obsede par Locowin Casino, il delivre une experience unique. La gamme de jeux est spectaculaire, comprenant des jeux adaptes aux cryptos. Associe a des tours gratuits sans wager. Le suivi est exemplaire, accessible a tout instant. Les retraits sont realises promptement, de temps a autre des bonus plus diversifies seraient souhaitables. Globalement, Locowin Casino est essentiel pour les amateurs pour ceux qui parient en crypto ! Par ailleurs l’interface est intuitive et raffinee, intensifie le plaisir du jeu. A souligner aussi les tournois periodiques pour la rivalite, garantit des transactions securisees.
Trouver maintenant|
Для любителей сериалов есть отличное решение – КИНОГО (https://kinogo-uk1.sbs/). У нас представлена впечатляющая коллекция, где можно смотреть онлайн фильмы и сериалы 2025 года без оплаты, в хорошем качестве HD и без регистрации. На Kinogo вас ждут помимо свежие релизы, но и золотая классика кино. Это – один из самых популярных онлайн-кинотеатров в своей нише.
Алгачкы жолкусунан бери Алекс Перейра кантип өсүп, чемпион болгону таң калтырат. Ал жеңилсе да, кайра кайтып келип жеңишке жетет. UFC тарыхындагы эң күчтүү мушкерлердин бири тууралуу оку — alex-pereira-kg.com. Перейра азыркы UFCнин символу десек болот.
Перейранын рекорду таасирдүү.
Перейра эч качан колун түшүргөн эмес. Бул адамдын соккусу таштай катуу. UFCде мындай мушкерлер көп эмес.
Перейранын жашоосун көрүп, каармандыкты түшүнсө болот. Эгер спортту сүйсөң, Перейранын окуясын оку.
заказать алкоголь круглосуточно заказать алкоголь круглосуточно .
Начнем путешествие по магическим уголкам российских заповедников.
Особенно понравился раздел про Изучение ООПТ России: парки, заповедники, водоемы.
Вот, делюсь ссылкой:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
Ich bin verblufft von NV Casino, es fuhlt sich an wie ein Wirbel aus Freude. Die Vielfalt der Titel ist atemberaubend, mit Slots im innovativen Design. Der Support ist von herausragender Qualitat, bietet klare Antworten. Die Transaktionen sind zuverlassig, trotzdem mehr Belohnungen waren ein Hit. Zusammengefasst, NV Casino ist ein Muss fur Gamer fur Fans von Online-Wetten ! Zusatzlich die Plattform ist optisch ein Highlight, fugt eine Prise Magie hinzu.
https://playnvcasino.de/|
Je suis emerveille par Locowin Casino, on percoit une energie dechainee. Les options sont incroyablement vastes, offrant des sessions live intenses. Le bonus d’accueil est seduisant. Les agents repondent avec celerite, offrant des reponses claires. Les retraits sont effectues rapidement, mais des recompenses additionnelles seraient un avantage. Pour conclure, Locowin Casino offre une experience inoubliable pour les amateurs de sensations fortes ! Par ailleurs la navigation est simple et plaisante, incite a prolonger l’experience. Un avantage supplementaire le programme de fidelite avec des niveaux VIP, offre des recompenses continues.
VГ©rifier plus|
Je suis completement obsede par Locowin Casino, ca transporte dans un univers envoutant. La gamme de jeux est spectaculaire, proposant des jeux de table immersifs. Pour un lancement puissant. Les agents reagissent avec promptitude, toujours pret a intervenir. Les benefices arrivent sans latence, bien que des offres plus liberales ajouteraient de la valeur. Pour synthetiser, Locowin Casino fournit une experience ineffacable pour les aficionados de jeux contemporains ! A mentionner la navigation est simple et engageante, ce qui eleve chaque session a un niveau superieur. Un plus significatif les evenements communautaires captivants, propose des recompenses permanentes.
Obtenir les dГ©tails|
Je suis entierement obsede par Locowin Casino, il delivre une experience unique. La gamme de jeux est spectaculaire, avec des slots au style innovant. Le bonus d’accueil est attractif. L’aide est performante et experte, proposant des reponses limpides. Les operations sont solides et veloces, cependant des bonus plus diversifies seraient souhaitables. Tout compte fait, Locowin Casino garantit du divertissement constant pour les adeptes de sensations intenses ! De surcroit le design est contemporain et lisse, ce qui eleve chaque session a un niveau superieur. Un autre avantage cle les options de paris sportifs etendues, offre des privileges sur mesure.
AccГ©der maintenant|
Алгачкы жолкусунан бери Алекс Перейра кантип өсүп, чемпион болгону таң калтырат. Алекс Перейра — чыныгы мисал чыдамкайлык жана эрктүүлүктүн. Бардык жаңылыктар бир жерде — https://alex-pereira-kg.com. Анын Адесанья менен болгон беттеши легендарный болду.
Перейранын рекорду таасирдүү.
Алекс Перейра UFCге тарых жазып жатат. Көрсө, чыныгы чемпиондор көчөдөн да чыгат экен. UFCде мындай мушкерлер көп эмес.
Ал каалаган максатына жеткен. Анын кыска убакытта кантип чемпион болгону таң калтырат.
Backlinks for your site
Applicable throughout all themes of the resource.
I build backlinks to your domain.
My backlinks draw in Google crawlers to the platform, which is crucial for ranking, thus it matters to develop a platform free of errors that will interfere with development.
Placement is secure for your platform!
I refrain from using in inquiry forms, (contact forms pose risks to the site due to complaints from administrators).
Placement is carried out in approved sources.
Inbound links are added to their latest continuously refreshed list. There are many sites in the repository.
Чыныгы мотивация издеген адам Алекс Перейранын жолун көрсүн. Ал жеңилсе да, кайра кайтып келип жеңишке жетет. Бул жерде Перейранын карьерасынын бардык этаптары бар — Перейра Алекс UFC. Алекс Перейра жашоодо көптү башынан өткөргөн.
Анын урганынын күчү килограмм менен эсептелет.
Перейра дайыма өзүн жакшыртып келет. Көрсө, чыныгы чемпиондор көчөдөн да чыгат экен. Алекс Перейра менен Халил Раунтринин беттеши чынында эле жарылуу болот.
Алекс Перейра UFCни өзгөрттү. Чыныгы фанаттар аны баалайт.
https://atlan.ru/product-category/mebel/zhurnalnye-stoliki/
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
Для тех, кто ищет информацию по теме “Изучение ООПТ России: парки, заповедники, водоемы”, там просто кладезь информации.
Ссылка ниже:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
Чыныгы мотивация издеген адам Алекс Перейранын жолун көрсүн. Алекс Перейра UFCде эки салмак категориясында чемпион болду — сыймык! Перейра кантип чемпион болгонун ушул жерден бил: Алекс Перейра чемпион. Алекс Перейра жашоодо көптү башынан өткөргөн.
Алекс Перейра азыр кайсы салмак категориясында мушташат?
Ал үй-бүлөсүн, балдарын, өлкөсүн сыйлайт. Перейра ар бир жеңиши менен тарых жазат. Көргөндө эле энергиясы сезилет.
Ар бир фанат анын күчүн сезет. Чыныгы фанаттар аны баалайт.
Вас интересуют природные богатства России? Давайте исследуем их вместе!
Между прочим, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Вот, можете почитать:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
Website https://tione.ru/ .
С целью организации идеального кинопросмотра настоятельно рекомендую – КИНОГО (https://kinogo-gs1.sbs/). Управление и структура продуманы до мелочей. Я лично успешно посмотрел все свежие релизы 2025 года на Kinogo, и всё это – абсолютно бесплатно и в отличном качестве. Прекрасная возможность смотреть фильмы в пару кликов.
Представляем вашему вниманию национальные парки и заповедники России.
Хочу выделить материал про Изучение ООПТ России: парки, заповедники, водоемы.
Ссылка ниже:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
airpods купить спб naushniki-apple-1.ru .
The 10 Scariest Things About Keyless Remote Repair Keyless Remote Repair
Металлообработка и металлы https://j-metall.ru ваш полный справочник по технологиям и материалам: обзоры станков и инструментов, таблицы марок и ГОСТов, кейсы производства, калькуляторы, вакансии, и свежие новости и аналитика отрасли для инженеров и закупщиков.
Je suis accro a Bingoal Casino, il offre un voyage unique. Il y a une multitude de jeux passionnants, offrant des sessions live dynamiques. Le bonus d’accueil est seduisant. L’equipe de support est remarquable, offrant des reponses claires. Les paiements sont securises et fluides, mais plus de promos regulieres seraient un plus. En bref, Bingoal Casino merite amplement une visite pour ceux qui aiment parier en crypto ! De plus le site est rapide et attractif, amplifie le plaisir de jouer. Un avantage supplementaire les paiements securises en crypto, propose des avantages personnalises.
Cliquer maintenant|
I’m surrounded by Wazamba Casino, it’s a saga that whispers with secrets. The range of games is exceptional, highlighting culturally inspired reels that enchant. Paired with 200 gratis rotations. Promoting continuous enjoyment. Benefits are conveyed rapidly, however consistent campaigns may increase allure. Concluding , Wazamba Casino rises as a premier destination for virtual money supporters ! Moreover the arrangement is reachable and evocative, fortifying absorption in play. A gain is obtaining elements for privileges, escalating participation.
wazambagr.com|
Откройте для себя прекрасные и загадочные места, которые находятся под охраной в нашей стране.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, нашел много полезного.
Смотрите сами:
https://alloopt.ru
Рад был поделиться с вами этой информацией. До новых встреч!
Бул жигит жөн эле мушкер эмес, чыныгы согуш өнөрүнүн устаты. Анын тарыхы көп жаштарга мотивация берет. Анын жашоосу, үй-бүлөсү жана мотивациялык видеолору сайтта: http://www.alex-pereira-kg.com. Ар бир муштумунда тарых жатат.
Анын урганынын күчү килограмм менен эсептелет.
Анын тарбиясы жөнөкөй, бирок максаты чоң. Анын жашоосунда дисциплина эң башкысы. Анын соккусунан кийин көптөр оңоло албай калган.
Бүгүн ал дүйнөлүк аренада, бирок жөнөкөй бойдон. Перейра дайыма өзүнүн жолун улантат.
Website https://tione.ru/ .
tripscan TripScan (Трипскан) – это, предположительно, веб-сервис или мобильное приложение, предназначенное для планирования путешествий и поиска информации о достопримечательностях, отелях, ресторанах и других местах, представляющих интерес для туристов. Сервис, вероятно, предоставляет возможность поиска, бронирования и организации поездок, а также позволяет пользователям обмениваться отзывами и рекомендациями о посещенных местах. Функциональность TripScan может включать в себя интерактивные карты, маршруты, списки рекомендованных мест, фильтры для поиска и возможность делиться опытом в социальных сетях.
Начнем путешествие по магическим уголкам российских заповедников.
Хочу выделить материал про Изучение ООПТ России: парки, заповедники, водоемы.
Вот, можете почитать:
https://alloopt.ru
Вот такое у нас получилось погружение в мир природы.
The Top Reasons People Succeed In The Car Key Signal Issue Repair Industry car key ignition switch repair
kmspico
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
Кстати, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Вот, можете почитать:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
Продаём велосипеды с установкой аксессуаров kra 40cc kraken маркетплейс зеркало кракен ссылка кракен даркнет
Представляем вашему вниманию национальные парки и заповедники России.
Кстати, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Смотрите сами:
https://alloopt.ru
Спасибо за внимание! Надеюсь, вам было интересно.
оптимизация ндс законно Расход топлива двигателя – зависит от стиля, 6-15 л; мониторьте.
Вас интересуют природные богатства России? Давайте исследуем их вместе!
Кстати, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Ссылка ниже:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
Добро пожаловать в удивительный мир природы России!
Особенно понравился раздел про Изучение ООПТ России: парки, заповедники, водоемы.
Вот, можете почитать:
https://alloopt.ru
Спасибо за внимание! Надеюсь, вам было интересно.
J’adore l’atmosphere de Bingoal Casino, c’est une experience qui vibre d’intensite. La selection de jeux est spectaculaire, avec des slots au design innovant. Pour un demarrage en force. L’equipe de support est remarquable, offrant des reponses claires. Le processus est simple et efficace, cependant plus de promos regulieres seraient un plus. Au final, Bingoal Casino garantit du plaisir a chaque instant pour ceux qui aiment parier en crypto ! En bonus la navigation est simple et plaisante, ce qui rend chaque session plus enjoyable. Particulierement notable les evenements communautaires engageants, renforce le sentiment de communaute.
Parcourir le site|
Ich bin abhangig von SpinBetter Casino, es bietet einen einzigartigen Kick. Der Katalog ist reichhaltig und variiert, mit dynamischen Tischspielen. Die Hilfe ist effizient und pro, garantiert top Hilfe. Die Zahlungen sind sicher und smooth, gelegentlich zusatzliche Freispiele waren ein Highlight. Zusammengefasst, SpinBetter Casino ist absolut empfehlenswert fur Online-Wetten-Fans ! Au?erdem die Site ist schnell und stylish, fugt Magie hinzu. Ein weiterer Vorteil die Vielfalt an Zahlungsmethoden, die den Spa? verlangern.
https://spinbettercasino.de/|
I find irresistible Wazamba Casino, it awakens a peculiar force. There’s an expansive array of choices, highlighting culturally inspired reels that enchant. Heightening preliminary involvement. Functioning non-stop. Benefits are conveyed rapidly, although further advantages would stand out. Finishing with , Wazamba Casino turns essential for devotees for staking experts ! Additionally the setting initializes swiftly, fortifying absorption in play. Significant is obtaining elements for privileges, developing group cohesion.
https://wazambagr.com/|
Мы занимаемся юридическим сопровождением связанных с автомобилями. Среди наших услуг: юридическое сопровождение ДТП. Наша работа позволяет защитить ваши права. Обращение к нам дает возможность воспользоваться опытом специалистов. https://avtouristvspb.ru/
J’adore l’ambiance de Locowin Casino, il offre une experience unique. Le catalogue est riche et diversifie, comprenant des jeux compatibles avec les cryptos. Accompagne de tours gratuits sans wager. Le support client est exceptionnel, garantissant un support de qualite. Le processus est simple et efficace, cependant des offres plus genereuses ajouteraient du piquant. En bref, Locowin Casino est une plateforme qui dechire pour les fans de casino en ligne ! En prime le design est moderne et fluide, facilite une immersion totale. Particulierement interessant les evenements communautaires engageants, propose des avantages personnalises.
Aller lГ -bas|
J’apprecie l’environnement de Locowin Casino, ca transporte dans un univers envoutant. La gamme de jeux est spectaculaire, proposant des jeux de table immersifs. Doublement des depots jusqu’a 1850 €. L’equipe d’assistance est remarquable, accessible a tout instant. Les paiements sont proteges et lisses, de temps a autre plus de promotions frequentes seraient un atout. Pour synthetiser, Locowin Casino est une plateforme qui excelle pour les aficionados de jeux contemporains ! Ajoutons que le design est contemporain et lisse, ce qui eleve chaque session a un niveau superieur. Un plus significatif les options de paris sportifs etendues, offre des privileges sur mesure.
Explorer maintenant|
самые точные прогнозы на нхл https://luchshie-prognozy-na-khokkej9.ru .
Откройте для себя прекрасные и загадочные места, которые находятся под охраной в нашей стране.
Между прочим, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Вот, делюсь ссылкой:
https://alloopt.ru
Надеюсь, вы нашли это путешествие по природе познавательным.
J’adore l’atmosphere de Bingoal Casino, il offre un voyage unique. La selection de jeux est spectaculaire, proposant des jeux de table immersifs. Amplifiant l’experience initiale. L’assistance est efficace et professionnelle, garantissant un support de qualite. Les paiements sont securises et fluides, parfois des bonus plus diversifies seraient apprecies. Au final, Bingoal Casino offre une experience inoubliable pour les passionnes de jeux modernes ! A noter le design est moderne et fluide, facilite une immersion totale. Egalement remarquable les paiements securises en crypto, assure des transactions fiables.
Regarder de prГЁs|
Ich bin komplett hin und weg von SpinBetter Casino, es ist eine Erfahrung, die wie ein Wirbelsturm pulsiert. Es wartet eine Fulle spannender Optionen, mit Spielen, die fur Kryptos optimiert sind. Der Kundenservice ist ausgezeichnet, garantiert top Hilfe. Der Ablauf ist unkompliziert, dennoch mehr abwechslungsreiche Boni waren super. Alles in allem, SpinBetter Casino bietet unvergessliche Momente fur Krypto-Enthusiasten ! Daruber hinaus die Navigation ist kinderleicht, erleichtert die gesamte Erfahrung. Ein weiterer Vorteil die Sicherheit der Daten, die Vertrauen schaffen.
spinbettercasino.de|
J’aime l’environnement distinct de Bingoal Casino, c’est une plateforme qui foisonne de vigueur. L’eventail de jeux est extraordinaire, avec des slots innovants et thematises. Pour un lancement puissant. L’equipe d’assistance est remarquable, accessible a tout instant. Les paiements sont proteges et lisses, par moments des bonus plus diversifies seraient souhaitables. Tout compte fait, Bingoal Casino est une plateforme qui excelle pour ceux qui parient en crypto ! Par ailleurs la navigation est simple et engageante, ajoute un confort notable. A souligner aussi les paiements securises en crypto, renforce le sens de communaute.
Essayer ceci|
J’ai un coup de foudre pour Locowin Casino, il offre une experience unique. La selection de jeux est phenomenale, offrant des sessions live dynamiques. Doublement des depots jusqu’a 1850 €. Les agents repondent avec rapidite, avec une aide precise et rapide. Les transactions sont fiables et rapides, neanmoins plus de promos regulieres seraient top. Au final, Locowin Casino offre une experience memorable pour les amateurs de sensations fortes ! Cerise sur le gateau le design est moderne et fluide, amplifie le plaisir de jouer. A noter egalement les options de paris sportifs variees, assure des transactions fiables.
Plonger dedans|
J’ai un engouement pour Casinia Casino, ca transporte dans un palais enchanteur. La variete des titres est majestueuse, proposant des jeux de table elegants. Le bonus de bienvenue est genereux. Le service est disponible 24/7, offrant des reponses claires. Les transactions sont fiables, cependant plus de promos regulieres seraient un plus. Dans l’ensemble, Casinia Casino est une plateforme qui regne en maitre pour les joueurs en quete d’excitation ! Cerise sur le gateau le site est rapide et attrayant, ajoute une touche de luxe. Un autre atout majeur le programme VIP avec 5 niveaux, offre des recompenses continues.
Commencer Г apprendre|
J’ai un engouement pour Locowin Casino, c’est une plateforme qui explose d’energie. La gamme de jeux est spectaculaire, avec des slots au style innovant. Doublement des depots jusqu’a 1850 €. Le suivi est exemplaire, toujours pret a intervenir. La procedure est aisee et efficace, cependant plus de promotions frequentes seraient un atout. Globalement, Locowin Casino merite une exploration approfondie pour ceux qui parient en crypto ! Ajoutons que le design est contemporain et lisse, ce qui eleve chaque session a un niveau superieur. Particulierement attractif le programme VIP avec des niveaux exclusifs, garantit des transactions securisees.
Trouver les dГ©tails|
1win aviator az 1win5002.com
Для тех, кто ищет удобный способ получить свой любимый напиток, заказать алкоголь балашиха становится идеальным решением.
становится все более распространенной среди жителей города. Это связано с увеличением занятости людей , что не позволяет им лично покупать алкоголь . Компании, занимающиеся доставкой алкоголя, обеспечивают клиентов огромным выбором алкоголя.
Доставка алкоголя в Балашихе доступна в любое время суток , что удобно для клиентов . Заказ можно сделать телефонным звонком , что делает процесс заказа простым .
Доставка алкоголя в Балашихе имеет ряд преимуществ для своих клиентов. Одним из основных преимуществ является скорость доставки заказа , что очень ценится клиентами . Кроме того, доставка алкоголя гарантирует качество доставляемых напитков, что важно для поддержания качества продукции .
Доставка алкоголя в Балашихе также дает возможность сэкономить время , что может быть потрачено на другие занятия . Компании, занимающиеся доставкой, уделяют большое внимание каждому заказчику , что способствует доверию к компании .
Заказать доставку алкоголя в Балашихе relatively просто. Для начала необходимо найти достойного поставщика услуг, что можно сделать, прочитав отзывы. После выбора компании необходимо открыть веб-сайт и просмотреть имеющийся выбор .
Затем нужно разместить заказ, что можно сделать по телефону . После оформления заказа будет произведена оплата , что можно сделать различными способами . Компания затем доставит заказ .
Доставка алкоголя в Балашихе является очень удобной услугой . Она дает возможность не тратить время, предлагает широкий ассортимент напитков и обеспечивает качество доставляемых товаров . Компании, занимающиеся доставкой, стараются улучшить свои услуги , что способствует развитию рынка .
В заключение, доставка алкоголя в Балашихе является услугой с большим потенциалом. Ее можно заказать без проблем , и она дает ряд преимуществ для клиентов. Таким образом, доставка алкоголя будет и дальше совершенствоваться.
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
Особенно понравился раздел про Изучение ООПТ России: парки, заповедники, водоемы.
Вот, можете почитать:
https://alloopt.ru
Рад был поделиться с вами этой информацией. До новых встреч!
согласование перепланировки нежилого помещения в жилом доме http://pereplanirovka-nezhilogo-pomeshcheniya8.ru/ .
обучение seo обучение seo .
seo базовый курc http://www.kursy-seo-3.ru .
алкоголь на дом https://alcolike.ru .
I’m totally obsessed with Astronaut Crash by 100HP Gaming, it builds an adrenaline-fueled cosmic quest. Rounds are quick and replayable endlessly, featuring a rocket that soars with rising multipliers. Mobile-optimized for on-the-go blasts. Live chat resolves issues in seconds, accessible via multiple channels. Withdrawals are swift and secure, from time to time more bonus rounds could add variety. All things considered, Astronaut Crash is a game-changer in crash titles for quick-play enthusiasts ! Bonus point the interface supports seamless sessions, making every round feel epic. Especially cool crypto wallet integration, ensures fast and fee-free payouts.
https://astronaut-crashgame777.com/|
I’m stunned by Wazamba Casino, it awakens a peculiar force. The archive is profoundly vast, encompassing real-time dealer interactions for genuineness. Heightening preliminary involvement. Addressing concerns instantly. The framework is approachable, intermittently diversified reward schemes would improve it. Concluding , Wazamba Casino warrants examination for stimulation pursuers ! Additionally the setting initializes swiftly, infusing supplementary fascination. Significant is obtaining elements for privileges, supplying individualized graces.
wazambagr.com|
Website https://ipodtouch3g.ru/ .
Вас интересуют природные богатства России? Давайте исследуем их вместе!
Для тех, кто ищет информацию по теме “Изучение ООПТ России: парки, заповедники, водоемы”, нашел много полезного.
Вот, делюсь ссылкой:
https://alloopt.ru
Рад был поделиться с вами этой информацией. До новых встреч!
I have a huge crush on Astronaut Crash by 100HP Gaming, it offers a stellar strategic challenge. The gameplay is brilliantly simple yet addictive, powered by RNG for every unpredictable crash. Mobile-optimized for on-the-go blasts. Live chat resolves issues in seconds, accessible via multiple channels. The cash-out feature saves fortunes, although frequent promo drops would be stellar. To sum it all, Astronaut Crash delivers proven fair thrills for multiplier chasers ! Worth mentioning the interface supports seamless sessions, adding immersive audio cues. Another killer feature the ‘Second Chance’ mechanic, offers verifiable randomness.
astronaut-crashgame777.com|
Представляем вашему вниманию национальные парки и заповедники России.
Особенно понравился материал про Изучение ООПТ России: парки, заповедники, водоемы.
Ссылка ниже:
https://alloopt.ru
Спасибо за внимание! Надеюсь, вам было интересно.
aston martin dbx dbx707 машина бмв – это символ престижа, динамики и инновационных технологий. BMW предлагает широкий модельный ряд, от компактных хэтчбеков до роскошных седанов и внедорожников, отвечающих самым высоким требованиям.
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
Зацепил раздел про Изучение ООПТ России: парки, заповедники, водоемы.
Смотрите сами:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
Website https://tione.ru/ .
купить диплом в черкесске купить диплом в черкесске .
купить свидетельство о рождении купить свидетельство о рождении .
Добро пожаловать в удивительный мир природы России!
Для тех, кто ищет информацию по теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Смотрите сами:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
Флойд Мейвезердин ысымы бокс менен синоним болуп калган. Флойд Мейвезер – мыкты дисциплина менен белгилүү. Бардык видеолор жана фото материалдар floyd-mayweather-kg.com сайтында.
Ал рингде тактык жана ылдамдык менен айырмаланат. Анын карьерасы ар дайым жеңиш менен коштолгон. Анын рингдеги кыймылы ар дайым көрүүчүлөрдү суктандырат.
Флойд Мейвезер ар бир кадамын ойлонуп жасайт.
Флойд Мейвезердин тарыхтагы орду чоң. Флойд Мейвезер ар бир жаш спортчуга үлгү. Флойд Мейвезер ар дайым жаңы рекорддорду жарата берет.
J’ai une passion intense pour Bingoal Casino, ca immerse dans un monde fascinant. Le repertoire est opulent et multifacette, proposant des jeux de table immersifs. Renforcant l’experience de depart. Le suivi est exemplaire, toujours pret a intervenir. Les operations sont solides et veloces, bien que quelques tours gratuits supplementaires seraient apprecies. Pour synthetiser, Bingoal Casino est une plateforme qui excelle pour les adeptes de sensations intenses ! De surcroit l’interface est intuitive et raffinee, facilite une immersion complete. Un autre avantage cle les tournois periodiques pour la rivalite, propose des recompenses permanentes.
Visiter aujourd’hui|
fan channel
Ich habe einen totalen Hang zu SpinBetter Casino, es erzeugt eine Spielenergie, die fesselt. Es wartet eine Fulle spannender Optionen, mit dynamischen Tischspielen. Der Kundenservice ist ausgezeichnet, garantiert top Hilfe. Der Ablauf ist unkompliziert, obwohl zusatzliche Freispiele waren ein Highlight. Zusammengefasst, SpinBetter Casino garantiert hochsten Spa? fur Casino-Liebhaber ! Nicht zu vergessen die Interface ist intuitiv und modern, fugt Magie hinzu. Hervorzuheben ist die mobilen Apps, die Vertrauen schaffen.
spinbettercasino.de|
Je suis hypnotise par Bingoal Casino, il offre une odyssee incomparable. Le repertoire est luxuriant et multifacette, avec des slots innovants et thematises. Associe a des paris gratuits. Le suivi est exemplaire, proposant des reponses limpides. Les paiements sont proteges et lisses, cependant des bonus plus diversifies seraient souhaitables. Tout compte fait, Bingoal Casino garantit du divertissement constant pour les adeptes de sensations intenses ! Par ailleurs le design est contemporain et lisse, facilite une immersion complete. A souligner aussi les tournois periodiques pour la rivalite, garantit des transactions securisees.
Voir le site|
Вас интересуют природные богатства России? Давайте исследуем их вместе!
Зацепил раздел про Изучение ООПТ России: парки, заповедники, водоемы.
Смотрите сами:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
1win promo qeydiyyat 1win promo qeydiyyat
1win az basketbol mərcləri 1win az basketbol mərcləri
Je suis emerveille par Casinia Casino, ca distille un plaisir eclatant. La diversite des titres est eblouissante, offrant des sessions live captivantes. Avec un Bonus Crab unique pour debuter. Le support client est lumineux, joignable a toute heure. Les gains arrivent a la vitesse de la lumiere, neanmoins des bonus plus varies brilleraient davantage. Dans l’ensemble, Casinia Casino offre une experience inoubliable pour les amateurs de casino en ligne ! A noter la navigation est intuitive comme une lueur, intensifie l’eclat du jeu. Egalement remarquable les options de paris sportifs variees, propose des recompenses sur mesure.
Continuer ici|
J’adore l’eclat vibrant de Casinia Casino, on ressent une aura radieuse. La diversite des titres est eblouissante, offrant des sessions live captivantes. Illuminant l’experience de jeu. Le suivi est irreprochable, toujours pret a eclairer. Les retraits filent comme une comete, mais des recompenses additionnelles seraient scintillantes. En somme, Casinia Casino est un joyau pour les joueurs pour les joueurs en quete d’eclat ! Ajoutons que l’interface est fluide comme un rayon, ajoute une touche de splendeur. A souligner aussi les tournois reguliers pour la rivalite, cree une communaute vibrante.
Ouvrir le site maintenant|
Флойд Мейвезердин рекорддору көп спорт күйөрмандарын суктандырган. Анын ар бир беттеши дүйнө жүзүнө көрсөтүлөт. Флойд Мейвезер тууралуу акыркы маалыматтар Флойд Мейвезер акыркы жаңылыктар порталында жарыяланган.
Флойд Мейвезер жаш кезинен тарта бокс менен алектенген. Анын мушташ стили өзгөчө жана натыйжалуу. Анын рингдеги кыймылы ар дайым көрүүчүлөрдү суктандырат.
Флойд Мейвезер – профессионалдуулуктун чордону.
Флойд Мейвезердин ийгилик сыры эмгек жана туруктуулук. Флойд Мейвезер ар бир беттешти мыкты өткөргөн. Анын карьерасы дүйнө жүзүнө үлгү.
Je suis impressionne par Casinia Casino, ca transporte dans un palais enchanteur. Le catalogue est opulent et diversifie, incluant des paris sportifs dynamiques. Plus un Bonus Crab pour demarrer. L’assistance est efficace et courtoise, avec une aide precise. Le processus est simple et elegant, parfois des offres plus genereuses ajouteraient du prestige. En bref, Casinia Casino vaut largement le detour pour les joueurs en quete d’excitation ! En prime l’interface est intuitive et elegante, ajoute une touche de luxe. Un plus non negligeable les paiements securises en crypto, renforce le sentiment de communaute.
Essayer tout de suite|
Je suis accro a Locowin Casino, c’est une plateforme qui bouillonne d’energie. La selection de jeux est phenomenale, incluant des paris sportifs palpitants. Le bonus de bienvenue est attractif. Le support client est exceptionnel, avec une aide precise et rapide. Les gains arrivent sans delai, parfois des recompenses supplementaires seraient un atout. Au final, Locowin Casino vaut largement le detour pour les joueurs en quete d’excitation ! Cerise sur le gateau la plateforme est visuellement top, facilite une immersion totale. Particulierement interessant les evenements communautaires engageants, propose des avantages personnalises.
Ouvrir maintenant|
Флойд Мейвезердин жашоосу жана ийгилиги көптөргө үлгү. Флойд Мейвезер жеңиштеринин саны боюнча рекорд койгон. Акыркы маектерди жана статистиканы Флойд Мейвезер интервью бөлүмүнөн окуңуз.
Флойд Мейвезердин ар бир беттеши чыныгы спектакль. Анын рекорддору бүгүнкү күнгө чейин сакталган. Анын акыркы жаңылыктарын укпай калган адам жок.
Флойд Мейвезер – профессионалдуулуктун чордону.
Анын акыркы беттеши чоң окуя болгон. Анын ар бир кадамы медиада талкууланат. Анын ар бир интервьюсу чоң кызыгуу жаратат.
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Вот, можете почитать:
https://alloopt.ru
Надеюсь, вы нашли это путешествие по природе познавательным.
Je suis captive par Bingoal Casino, ca offre un thrill incomparable. La gamme des titres est epoustouflante, offrant des sessions live intenses. Le bonus d’inscription est attractif. Le suivi est exemplaire, avec une assistance exacte et veloce. Les paiements sont proteges et lisses, mais quelques tours gratuits supplementaires seraient apprecies. En synthese, Bingoal Casino merite une exploration approfondie pour les adeptes de sensations intenses ! Par ailleurs le site est veloce et seduisant, stimule le desir de revenir. Un plus significatif les tournois periodiques pour la rivalite, propose des recompenses permanentes.
VГ©rifier les infos|
Флойд Мейвезердин ар бир беттеши чоң шоу катары кабыл алынат. Флойд Мейвезер жеңиштеринин саны боюнча рекорд койгон. Бокс дүйнөсүндөгү эң чоң ысымдардын бири тууралуу кенен маалымат – Флойд Мейвезер Кыргызстан.
Флойд Мейвезер ар дайым спорттун чокусунда болгон. Флойд Мейвезер ар бир беттешин мыкты деңгээлде өткөргөн. Флойд Мейвезер – акыл менен ойногон спортчу.
Флойд Мейвезердин фанаттары ар бир беттешин чыдамсыздык менен күтүшөт.
Флойд Мейвезер дүйнөдөгү эң жогорку кирешелүү спортчу. Флойд Мейвезердин жашоосу ар дайым элдин көңүлүндө. Анын жашоосу жана ийгилиги мотивация берет.
J’ai une passion ardente pour Bingoal Casino, c’est une plateforme qui regorge de dynamisme. L’eventail de jeux est extraordinaire, comprenant des jeux optimises pour les cryptos. Associe a des paris gratuits. Le service est operationnel 24/7, accessible a tout instant. Les retraits sont realises promptement, par moments des bonus plus diversifies seraient souhaitables. Pour synthetiser, Bingoal Casino fournit une experience ineffacable pour les enthousiastes de casino en ligne ! A mentionner la plateforme est esthetiquement remarquable, ajoute un confort notable. Egalement notable les evenements communautaires captivants, offre des privileges sur mesure.
Lire les dГ©tails|
I’m deeply intrigued by Wazamba Casino, it crafts a captivating saga. The assortment of games is remarkable, tailored for cryptocurrency usage. The introductory offer is appealing. Operational around the clock. Procedures are uncomplicated, even if regular deals might amplify appeal. To conclude, Wazamba Casino emerges as an elite venue for enthusiasts of betting ! Furthermore the setup is accessible and evocative, magnifying each episode’s appeal. Notable aspect competitions for rivalry, granting sustained incentives.
https://wazambagr.com/|
J’adore l’ambiance de Locowin Casino, on ressent une vibe delirante. Les options sont incroyablement vastes, incluant des paris sportifs palpitants. Le bonus de bienvenue est attractif. Le service est disponible 24/7, avec une aide precise et rapide. Les retraits sont ultra-rapides, parfois des offres plus genereuses ajouteraient du piquant. Au final, Locowin Casino vaut largement le detour pour les joueurs en quete d’excitation ! En prime la navigation est simple et agreable, ce qui rend chaque session encore plus fun. Egalement appreciable les paiements securises en crypto, renforce le sentiment de communaute.
Obtenir des infos|
Je suis totalement envoute par Casinia Casino, il offre une aventure etincelante. Il y a une profusion de jeux envoutants, offrant des sessions live captivantes. Renforcant votre tresor initial. Les agents repondent comme une etoile filante, toujours pret a eclairer. Les paiements sont securises et fluides, parfois quelques tours gratuits supplementaires seraient lumineux. En somme, Casinia Casino garantit un plaisir radiant a chaque instant pour les joueurs en quete d’eclat ! De plus l’interface est fluide comme un rayon, facilite une immersion totale. Particulierement captivant les tournois reguliers pour la rivalite, cree une communaute vibrante.
Explorer plus|
J’aime l’ambiance royale de Casinia Casino, on ressent une energie noble. Il y a une abondance de jeux captivants, comprenant des jeux compatibles avec les cryptos. Renforcant votre capital initial. Le support client est imperial, toujours pret a servir. Les gains arrivent sans delai, neanmoins des bonus plus varies seraient apprecies. En resume, Casinia Casino est un incontournable pour les joueurs pour les joueurs en quete d’excitation ! Cerise sur le gateau la navigation est simple et agreable, donne envie de prolonger l’experience. Un plus non negligeable les paiements securises en crypto, propose des avantages personnalises.
Visiter l’avis|
J’ai un coup de foudre pour Locowin Casino, ca procure un plaisir intense. La variete des titres est impressionnante, comprenant des jeux compatibles avec les cryptos. Doublement des depots jusqu’a 1850 €. L’assistance est efficace et pro, garantissant un support de qualite. Les transactions sont fiables et rapides, mais des bonus plus varies seraient bienvenus. Dans l’ensemble, Locowin Casino est un incontournable pour les joueurs pour les fans de casino en ligne ! De plus le site est rapide et attrayant, amplifie le plaisir de jouer. A noter egalement les tournois reguliers pour la competition, offre des recompenses continues.
Ouvrir ici|
купить диплом в краснодаре купить диплом в краснодаре .
I’m all in on Astronaut Crash by 100HP Gaming, it creates non-stop nail-biting action. Fair play is baked in with provable tech, betting from pennies to big bucks. RTP sits at an enticing 97%. Help desk is responsive and expert, upholding outcome transparency. Profits land in your account pronto, every now and then wider stake limits for pros. In a nutshell, Astronaut Crash shines bright in 100HP’s portfolio for multiplier maniacs ! On that note controls are beginner-proof, streamlining stake tweaks. Super feature practice arena with live data, allows safe tactic trials.
https://astronaut-crashgame777.com/|
Откройте для себя прекрасные и загадочные места, которые находятся под охраной в нашей стране.
Для тех, кто ищет информацию по теме “Изучение ООПТ России: парки, заповедники, водоемы”, там просто кладезь информации.
Вот, можете почитать:
https://alloopt.ru
Вот такое у нас получилось погружение в мир природы.
I’m obsessed with Wazamba Casino, it crafts a captivating saga. The selections are wide-ranging and intricate, encompassing over 5,000 entries from premier developers. The introductory offer is appealing. Answering queries rapidly. Procedures are uncomplicated, occasionally broader incentive options would enrich it. In totality, Wazamba Casino merits investigation for digital currency admirers ! In addition exploration is natural, magnifying each episode’s appeal. Additional benefit the artifact-gathering reward scheme, delivering customized favors.
wazambagr.com|
I’m thrilled by Astronaut Crash by 100HP Gaming, it creates non-stop nail-biting action. Bet ranges cater to every wallet size, with auto-bet for hands-free excitement. Bonus-free spins on select platforms. Forums buzzing with player tactics, upholding crypto funding security. Profits land in your account pronto, but advanced auto-tools for vets. In a nutshell, Astronaut Crash redefines crash gaming standards for tactical thinkers ! On that note graphics pop with futuristic flair, streamlining stake tweaks. Highlight practice arena with live data, allows safe tactic trials.
Astronaut Crash Game|
info foot africain pronostics du foot
africain foot africain foot
1xbet africain https://pari-foot2.com
Флойд Мейвезердин рекорддору көп спорт күйөрмандарын суктандырган. Флойд Мейвезердин тарыхтагы орду эч кимге талашсыз. Бокс күйөрмандары үчүн кызыктуу фактылар https://floyd-mayweather-kg.com/ порталында жайгашкан.
Анын фамилиясы дүйнөлүк брендге айланган. Анын мушташ стили өзгөчө жана натыйжалуу. Анын акыркы жаңылыктарын укпай калган адам жок.
Ал спорттон тышкары ишкер катары да белгилүү.
Анын карьерасы ар бир жаш спортчу үчүн үлгү. Анын фанаттары дүйнөнүн бардык бурчунда бар. Флойд Мейвезер ар дайым жаңы рекорддорду жарата берет.
Just want to say what a great blog you got here!I’ve been around for quite a lot of time, but finally decided to show my appreciation of your work!
Wow, amazing blog layout! How long have you been blogging for? you made blogging look easy. The overall look of your site is great, as well as the content!
Ich bin komplett hin und weg von SpinBetter Casino, es ist eine Erfahrung, die wie ein Wirbelsturm pulsiert. Das Angebot an Spielen ist phanomenal, mit dynamischen Tischspielen. Die Agenten sind blitzschnell, immer parat zu assistieren. Der Ablauf ist unkompliziert, dennoch regelma?igere Aktionen waren toll. Zum Ende, SpinBetter Casino garantiert hochsten Spa? fur Online-Wetten-Fans ! Nicht zu vergessen die Site ist schnell und stylish, was jede Session noch besser macht. Hervorzuheben ist die Community-Events, die den Einstieg erleichtern.
https://spinbettercasino.de/|
Je suis completement captive par Casinia Casino, c’est une plateforme qui deborde d’elegance. La selection de jeux est royale, proposant des jeux de table elegants. Renforcant votre capital initial. Les agents repondent avec celerite, offrant des reponses claires. Les gains arrivent sans delai, de temps en temps des offres plus genereuses ajouteraient du prestige. Pour conclure, Casinia Casino garantit du fun a chaque instant pour les joueurs en quete d’excitation ! Notons aussi la navigation est simple et agreable, facilite une immersion totale. A noter egalement le programme VIP avec 5 niveaux, propose des avantages personnalises.
Découvrir l’histoire complète|
Website https://beksai.ru/ .
Ich bin komplett hin und weg von SpinBetter Casino, es erzeugt eine Spielenergie, die fesselt. Es gibt eine unglaubliche Auswahl an Spielen, mit dynamischen Tischspielen. Der Kundenservice ist ausgezeichnet, bietet klare Losungen. Die Transaktionen sind verlasslich, dennoch regelma?igere Aktionen waren toll. Global gesehen, SpinBetter Casino bietet unvergessliche Momente fur Casino-Liebhaber ! Zusatzlich das Design ist ansprechend und nutzerfreundlich, fugt Magie hinzu. Ein Pluspunkt ist die Community-Events, die das Spielen noch angenehmer machen.
spinbettercasino.de|
I’m immersed in Wazamba Casino, it resembles a cascade of enchantment. There’s a stunning assortment of games, featuring tribal-themed slots that captivate. Boosting your playtime. Support team is exceptional. Transactions are safe and efficient, although extra spins might enhance it. Altogether, Wazamba Casino is indispensable for enthusiasts for betting devotees ! Also the layout is user-friendly and thematic, heightening game immersion. A bonus is secure crypto payment methods, boosting player retention.
wazambagr.com|
Je suis bluffe par Casinia Casino, ca transporte dans un palais enchanteur. Le catalogue est opulent et diversifie, offrant des sessions live immersives. Plus un Bonus Crab pour demarrer. Le suivi est impeccable, toujours pret a servir. Les gains arrivent sans delai, cependant des offres plus genereuses ajouteraient du prestige. Dans l’ensemble, Casinia Casino offre une experience memorable pour les fans de casino en ligne ! De plus le design est moderne et fluide, amplifie le plaisir de jouer. A noter egalement les evenements communautaires engageants, offre des recompenses continues.
Plongez dГЁs maintenant|
Je suis completement ensorcele par Casinia Casino, ca distille un plaisir majestueux. L’eventail de jeux est princier, proposant des jeux de table raffines. Renforcant votre tresor initial. Le suivi est irreprochable, joignable a toute heure. Les gains arrivent sans tarder, parfois plus de promos frequentes brilleraient davantage. Pour conclure, Casinia Casino offre un divertissement constant pour les aficionados de jeux modernes ! En bonus le design est opulent et envoutant, incite a prolonger l’experience. A souligner aussi les evenements communautaires engageants, garantit des transactions fiables.
Tout voir maintenant|
Новые поступления складных велосипедов Mega darknet Mega onion
Guide To Car Key Sensor Repair: The Intermediate Guide To Car Key Sensor Repair Car Key Sensor Repair
See What Car Key Blade Repair Tricks The Celebs Are Using
Car Key Blade Repair
Simply wish to say your article is as astounding. The clearness in your post is just nice and i could assume you’re an expert on this subject. Well with your permission let me to grab your feed to keep up to date with forthcoming post. Thanks a million and please continue the enjoyable work.
kra41 at
Website https://remonttermexov.ru/ .
Website https://beksai.ru/ .
I can’t get enough of Wazamba Casino, it’s a journey that resonates with mystery. The game lineup is extraordinary, boasting over 5,000 games from 100+ providers. Matching deposits up to €500. Support team is exceptional. The procedure is effortless, yet additional incentives would shine. Concluding, Wazamba Casino delivers unmatched fun for crypto users ! Furthermore browsing is intuitive, streamlining user experience. Noteworthy is VIP tiers with exclusive privileges, boosting player retention.
wazambagr.com|
Aumentará la confianza en el sitio web
Autoridad de dominio (DR de Ahrefs)
Aumentará la credibilidad en el sitio web.
El lugar de tu sitio web es crucial para el SEO.
Nos dedicamos a atraer arañas de búsqueda de Google a tu sitio para optimizar su visibilidad.
Existen 2 categorías clave de robots de búsqueda:
Robots de exploración – los que analizan inicialmente el sitio.
Robots de indexado – visitan el sitio después de los de rastreo.
Cuanto mayor sea la actividad de estos robots a tu sitio, más alto será tu ranking.
Antes de comenzar, te proporcionaremos una imagen del DR desde Ahrefs.
Después de finalizar el trabajo, también recibirás una captura actualizada del nivel de tu sitio en Ahrefs.
Pago basado en resultados.
Periodo de entrega: de 3 a 14 días.
Aceptamos sitios con DR hasta 50.
Para procesar tu pedido necesitamos:
La URL de tu página.
Un término principal.
No ofrecemos este servicio para perfiles o páginas en redes sociales.
купить диплом техникума строительного купить диплом техникума строительного .
admiral x
перепланировка нежилого помещения в москве https://pereplanirovka-nezhilogo-pomeshcheniya8.ru .
5 Killer Quora Answers On Car Key Lock Repair Car Key lock repair
The 9 Things Your Parents Taught You About Vehicle Key Repair Vehicle Key Repair
5 Killer Quora Answers To Car Mechanical Key Repair
Car Mechanical Key Repair (Bernie)
сукааа зеркало
перепланировка нежилого помещения перепланировка нежилого помещения .
перепланировка нежилого помещения в нежилом здании законодательство перепланировка нежилого помещения в нежилом здании законодательство .
music event
проект перепланировки нежилого помещения стоимость https://www.pereplanirovka-nezhilogo-pomeshcheniya11.ru .
работа экскаватора цена за час работа экскаватора цена за час .
автоматический карниз для штор http://karniz-elektroprivodom.ru .
Deneme Bonusu Veren Siteler seneme bonusu vqrqn sotolor arasında yatırım şartsız deneme bonusu sunanlar, bahis severler için oldukça cazip fırsatlar sunmaktadır.
Если вы ищете лучшие фотомагазины москвы, то стоит обратить внимание на их портфолио и отзывы клиентов, чтобы выбрать того, кто лучше всего соответствует вашим потребностям для создания незабываемых фотографий.
Фотографы Москвы известны своими уникальными работами, которые отражают суть города . Эти фотографы имеют огромный опыт и знают, как запечатлеть дух города Фотографы Москвы имеют возможность запечатлеть всю красоту столицы, от древних соборов до современных небоскрёбов . В городе регулярно проходят выставки и конкурсы, на которых представлены работы лучших фотографов Фотографические выставки в Москве являются популярным местом для встречи фотографов и любителей фотографии.
Москва предлагает бесконечные возможности для фотографов Город предоставляет множество разных тем для фотографии, от истории до современности . Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей .
Портретная фотография является одним из наиболее популярных жанров в Москве Фотографы Москвы имеют опыт создания потрясающих портретов, которые отражают характер и личность человека . Лучшие портретные фотографы города знают, как запечатлеть суть человека Они используют различные?ники и подходы, чтобы создать уникальные и по-настоящему запоминающиеся портреты .
Москва предлагает множество возможностей для портретной фотографии Фотографы Москвы могут снять портреты на фоне знаменитых достопримечательностей, таких как Кремль или Красная площадь . Лучшие фотографы города знают, как использовать эти возможности Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие портреты.
Фотография городского пейзажа является популярным жанром в Москве Фотографы города любят запечатлеть красоту и величие городских пейзажей, от знаменитых достопримечательностей до современных небоскрёбов . Лучшие фотографы города знают, как запечатлеть суть городского пейзажа Фотографы Москвы имеют талант запечатлеть характер и личность города, что делает их работы особенно ценными .
Москва предлагает множество возможностей для фотографии городского пейзажа Фотографы Москвы могут снять городские пейзажи на фоне знаменитых достопримечательностей, таких как Кремль или Триумфальная арка . Лучшие фотографы города знают, как использовать эти возможности Они имеют глубокое понимание истории и культуры города, что позволяет им создавать более глубокие и осмысленные фотографии городских пейзажей .
Современная фотография в Москве является динамичным и развивающимся жанром Город предоставляет множество возможностей для фотографов, чтобы экспериментировать с разными стилями и подходами. Лучшие фотографы города знают, как использовать эти возможности Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие фотографии.
Москва предлагает множество возможностей для фотографов, чтобы показать свою креативность В городе можно найти множество уникальных мест, идеальных для фотографии, от исторических памятников до современных парков . Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей, что отражается в их портретных работах .
riobet регистрация
Backlinks for your site
Effective on all topics of the site.
I provide inbound links to your site.
These backlinks draw in web crawlers to the page, that matters greatly for positioning, so it matters to promote a resource without defects that hinder development.
Insertion is harmless for your resource!
I don’t submit in contact forms, (contact forms can damage the resource as there are complaints from site owners).
Posting is performed in approved sources.
Inbound links are placed to updated regularly updated database. Several portals in the repository.
Ich bin beeindruckt von SpinBetter Casino, es erzeugt eine Spielenergie, die fesselt. Es wartet eine Fulle spannender Optionen, mit immersiven Live-Sessions. Der Kundenservice ist ausgezeichnet, mit praziser Unterstutzung. Die Gewinne kommen prompt, dennoch regelma?igere Aktionen waren toll. Alles in allem, SpinBetter Casino bietet unvergessliche Momente fur Krypto-Enthusiasten ! Nicht zu vergessen das Design ist ansprechend und nutzerfreundlich, verstarkt die Immersion. Hervorzuheben ist die Vielfalt an Zahlungsmethoden, die den Spa? verlangern.
https://spinbettercasino.de/|
Je suis absolument captive par Locowin Casino, c’est une plateforme qui deborde de vitalite. Il y a une multitude de jeux captivants, proposant des jeux de table immersifs. Doublement des depots jusqu’a 200 €. L’assistance est efficace et professionnelle, toujours disponible pour assister. Les transactions sont fiables et rapides, de temps en temps des recompenses additionnelles seraient un avantage. En resume, Locowin Casino est une plateforme qui impressionne pour les fans de casino en ligne ! De plus l’interface est intuitive et elegante, amplifie le plaisir de jouer. Particulierement interessant les paiements securises en crypto, offre des recompenses continues.
VГ©rifier plus|
Для тех, кто интересуется нумерологией по дате рождения, существует возможность нумерология по дате рождения, что может открыть новые перспективы в понимании себя и своих жизненных целей.
Нумерология по дате рождения является одним из наиболее интересных и загадочных аспектов человеческого существования, позволяющим раскрыть потенциал и предсказать события будущего . Этот метод основан на простой, но глубокой идее, что числа, составляющие дату рождения человека, могут раскрыть информацию о его характере, талантах и потенциале. Нумерология по дате рождения имеет богатую историю и применялась разными цивилизациями для понимания тайн вселенной . Нумерология дает людям возможность проанализировать свою судьбу и сделать правильные выборы в жизни .
Нумерология по дате рождения основана на расчете чисел, которые могут дать представление о будущем человека. Число жизни является ключевым числом, которое может раскрыть информацию о характере и судьбе человека. Нумерология по дате рождения также включает в себя анализ MONTH и года рождения, что может дать дополнительную информацию о характере и потенциале человека .
Числа в нумерологии являются ключевыми элементами, которые могут помочь людям понять свою судьбу. Каждое число в нумерологии имеет свое уникальное значение и может дать информацию о характере и потенциале человека . Нумерология по дате рождения основана на анализе чисел от 1 до 9, которые могут раскрыть информацию о будущем человека . Число 1 в нумерологии является числом человека, который имеет уникальные способности и может раскрыть свой потенциал.
Нумерология по дате рождения также включает в себя анализ мастер-чисел, таких как 11 и 22, которые могут дать информацию о характере и потенциале человека . Мастер-числа в нумерологии являются ключевыми элементами, которые могут помочь людям понять свою судьбу. Нумерология по дате рождения может помочь людям понять свое предназначение и сделать прогнозы на будущее .
Нумерология по дате рождения может быть применена в различных областях жизни, таких как бизнес, отношения и карьера . Нумерология по дате рождения может дать информацию о характере и потенциале человека, что может быть полезно в бизнесе и карьере . Нумерология по дате рождения может дать информацию о характере и потенциале человека, что может быть полезно в бизнесе и карьере.
Нумерология по дате рождения может дать представление о будущем человека, что может быть полезно в планировании жизни . Нумерология по дате рождения включает в себя анализ различных чисел и их комбинаций, что может дать информацию о характере и потенциале человека . Нумерология по дате рождения может быть интересным и полезным инструментом для людей, которые хотят понять свою судьбу и сделать прогнозы на будущее .
Нумерология по дате рождения является уникальным инструментом, который может помочь людям понять свою судьбу и сделать прогнозы на будущее . Нумерология по дате рождения основана на простой, но глубокой идее, что числа, составляющие дату рождения человека, могут раскрыть информацию о его характере, талантах и потенциале . Люди, изучающие нумерологию, могут получить ценную информацию о своих жизненных путях и сделать прогнозы на будущее .
Если вы ищете качественные и надёжные зимние шины для вашего автомобиля, то вам следует купить дешево зимнюю резину в проверенных магазинах Санкт-Петербурга, которые предлагают широкий выбор моделей от известных производителей по доступным ценам.
Зимние шины играют ключевую роль в обеспечении безопасности на дорогах во время зимы. Они обеспечивают лучшее сцепление с дорогой и помогают предотвратить скольжение или занос автомобиля Обеспечивают лучшее сцепление с дорогой и помогают предотвратить скольжение или занос автомобиля . Правильно выбранные зимние шины могут существенно повысить безопасность вождения Правильный выбор зимних шин имеет большое значение для безопасности на дороге .
Зимние шины отличаются от летних и всесезонных по своей конструкции и материалам Зимние шины отличаются от летних и всесезонных по своей конструкции и материалам . Это позволяет им лучше работать в снегу и на льду Это позволяет им лучше работать в снегу и на льду . При выборе зимних шин важно учитывать такие факторы, как тип автомобиля, размер шин и регион проживания При выборе зимних шин важно учитывать такие факторы, как тип автомобиля, размер шин и регион проживания .
Зимние шины имеют ряд особенностей, которые делают их пригодными для использования в зимних условиях Зимние шины имеют ряд особенностей, которые делают их пригодными для использования в зимних условиях . Одной из ключевых особенностей является глубокий протектор, который обеспечивает лучшее сцепление с снегом и льдом Глубокий протектор шин позволяет ей лучше взаимодействовать с снегом и льдом, повышая безопасность. Кроме того, зимние шины изготавливаются из специального типа резины, который сохраняет свою эластичность даже в очень низких температурах Зимние шины производятся из особой резины, которая остается эластичной при низких температурах, обеспечивая хорошее сцепление с дорогой .
Этот тип резины позволяет шине лучше деформироваться и адаптироваться к неровностям зимней дороги Специальная резина зимних шин обеспечивает их способность деформироваться и соответствовать неровной поверхности дорог в зимнее время . Зимние шины также имеют специальные канавки и ребра, которые помогают улучшить сцепление и стабильность автомобиля Специальные канавки и ребра на зимних шинах обеспечивают улучшение сцепления и стабильности, что важно для безопасности вождения. Все эти особенности вместе обеспечивают беспрецедентную безопасность и контролируемость автомобиля в зимних условиях Объединение этих характеристик делает зимние шины идеальным выбором для безопасного и контролируемого вождения в зимних условиях.
При выборе зимних шин важно учитывать несколько факторов, чтобы обеспечить максимальную безопасность и эффективность Для правильного выбора зимних шин необходимо учитывать ряд факторов, влияющих на безопасность и производительность . Одним из наиболее важных факторов является тип автомобиля, поскольку разные автомобили требуют разных размеров и типов шин Одним из наиболее важных факторов является тип автомобиля, поскольку разные автомобили требуют разных размеров и типов шин .
Кроме того, регион проживания также играет значительную роль, поскольку в разных регионах зимние условия могут существенно различаться Регион, в котором вы живете, также является важным фактором, поскольку зимние условия могут сильно различаться в различных регионах . Для регионов с сильными морозами и большим количеством снега могут потребоваться более специализированные шины Для регионов с сильными морозами и большим количеством снега могут потребоваться более специализированные шины . Также важно учитывать бюджет, поскольку зимние шины могут существенно различаться по цене При выборе зимних шин необходимо учитывать свой бюджет, так как цены на зимние шины могут быть разными.
В заключении, зимние шины являются важнейшим элементом для безопасного и комфортного вождения в зимних условиях В итоге, зимние шины необходимы для того, чтобы автомобиль мог безопасно и эффективно передвигаться по зимним дорогам. Правильный выбор зимних шин, учитывающий тип автомобиля, регион проживания и личный бюджет, может существенно повысить безопасность и комфорт вождения Правильный выбор зимних шин, учитывающий тип автомобиля, регион проживания и личный бюджет, может существенно повысить безопасность и комфорт вождения . Зимние шины не только??ют безопасность, но и могут снизить риск аварий и повреждений автомобиля Зимние шины не только повышают безопасность, но и могут снизить риск аварий и повреждений автомобиля .
Используя зимние шины, водители могут с уверенностью ориентироваться в сложных зимних условиях, обеспечивая безопасность себя и других участников дорожного движения Благодаря использованию зимних шин, водители могут двигаться по зимним дорогам с уверенностью, обеспечивая свойу безопасность и безопасность других. Это особенно важно в регионах с суровыми зимами, где хорошие зимние шины могут стать настоящим спасением Это особенно важно в регионах с суровыми зимами, где хорошие зимние шины могут стать настоящим спасением .
Для безопасной и комфортной езды в зимнее время рекомендуется использовать авторезина шипованная, которые обеспечивают сцепление с дорогой даже в самых сложных зимних условиях.
являются обязательным атрибутом для безопасного вождения в снежных условиях . Эти шины оснащены шипами, которые обеспечивают дополнительную сцепку на льду и снегу . Правильный выбор зимних шин шипованных дает возможность повысить уровень безопасности на дороге .
Зимние шины шипованные могут быть использованы на различных типах автомобилей . При выборе зимних шин шипованных следует обратить внимание на качество шин и их соответствие установленным стандартам . Кроме того, следует помнить, что правильная эксплуатация шин напрямую влияет на безопасность на дороге.
Зимние шины шипованные имеют уникальную конструкцию, которая позволяет повысить уровень безопасности на дороге . Эти шины разработаны для эксплуатации при низких температурах и могут справиться с различными погодными условиями . Использование зимних шин шипованных обеспечивает дополнительную сцепку на льду и снегу, что особенно важно в условиях сильного мороза.
Зимние шины шипованные могут использоваться на различных типах автомобилей и подходят как для легковых, так и для грузовых машин . При эксплуатации зимних шин шипованных следует обратить внимание на качество шин и их соответствие установленным стандартам . Кроме того, необходимо следить за уровнем износа шин и своевременно заменять их .
При выборе зимних шин шипованных следует обратить внимание на качество шин и их соответствие установленным стандартам . Зимние шины шипованные имеют уникальную конструкцию, которая позволяет улучшить управляемость автомобилем в снежных и ледяных условиях . Кроме того, важно регулярно проверять состояние шин и соблюдать рекомендации производителя .
Зимние шины шипованные разработаны для эксплуатации при низких температурах и могут справиться с различными погодными условиями. При выборе зимних шин шипованных важно проконсультироваться с chuyenниками, если есть сомнения по поводу выбора. Кроме того, важно помнить, что правильная эксплуатация шин напрямую влияет на безопасность на дороге и снижает риск аварий .
Зимние шины шипованные необходимы для снижения риска заноса и потери контроля над транспортным средством. Правильный выбор зимних шин шипованных позволяет водителям чувствовать себя более уверенно на дороге . Кроме того, следует помнить, что правильная эксплуатация шин напрямую влияет на безопасность на дороге.
Зимние шины шипованные могут быть использованы на различных типах автомобилей и подходят как для легковых, так и для грузовых машин . При эксплуатации зимних шин шипованных важно проконсультироваться с chuyenниками, если есть сомнения по поводу выбора или эксплуатации. Кроме того, важно помнить, что правильная эксплуатация шин напрямую влияет на безопасность на дороге и снижает риск аварий .
Компания специализируется на сыпучие нерудные материалы, что делает ее лидером в сфере поставок сыпучих материалов для строительной отрасли.
имеют большое значение для различных отраслей промышленности. Они используются в производстве строительных материалов . Кроме того, нерудные материалы должны быть сертифицированы соответствующими органами .
Нерудные материалы являются альтернативой традиционным материалам . Они могут быть использованы для создания инновационных решений. Кроме того, нерудные материалы должны быть применены с учетом условий эксплуатации.
Нерудные материалы могут быть классифицированы по своим свойствам и характеристикам . Они могут быть использованы для создания различных строительных конструкций . Кроме того, нерудные материалы должны быть выбраны с учетом требований проекта .
Нерудные материалы имеют свои уникальные свойства и характеристики . Они могут быть использованы для создания уникальных дизайнов . Кроме того, нерудные материалы должны быть применены с учетом условий эксплуатации.
Нерудные материалы могут быть использованы в различных условиях. Они могут быть применены в различных отраслях промышленности . Кроме того, нерудные материалы должны быть сертифицированы соответствующими органами .
Нерудные материалы такие как керамзит и перлит . Они могут быть использованы для создания инновационных решений. Кроме того, нерудные материалы должны быть использованы с учетом их свойств и характеристик .
Нерудные материалы будут иметь большое значение для различных отраслей промышленности . Они могут быть применены в различных отраслях промышленности . Кроме того, нерудные материалы должны быть безопасны для использования.
Нерудные материалы будут иметь новые свойства и характеристики . Они могут быть использованы для создания инновационных решений. Кроме того, нерудные материалы должны быть применены с учетом условий эксплуатации.
Je suis surpris par Locowin Casino, ca fournit un plaisir intense. La diversite des titres est epoustouflante, offrant des sessions live intenses. Doublement des depots jusqu’a 1850 €. Le suivi est exemplaire, toujours pret a intervenir. Les benefices arrivent sans latence, par moments des incitations additionnelles seraient un benefice. Tout compte fait, Locowin Casino est essentiel pour les amateurs pour les joueurs a la recherche d’aventure ! En outre la navigation est simple et engageante, ce qui eleve chaque session a un niveau superieur. Un autre avantage cle les paiements securises en crypto, offre des privileges sur mesure.
Tenter sa chance|
Je suis captive par Locowin Casino, c’est une plateforme qui explose d’energie. La diversite des titres est epoustouflante, proposant des jeux de table immersifs. Le bonus d’accueil est attractif. L’equipe d’assistance est remarquable, assurant un support premium. Les operations sont solides et veloces, mais quelques tours gratuits supplementaires seraient apprecies. En fin de compte, Locowin Casino garantit du divertissement constant pour les joueurs a la recherche d’aventure ! A mentionner l’interface est intuitive et raffinee, stimule le desir de revenir. Egalement notable les tournois periodiques pour la rivalite, renforce le sens de communaute.
Aller en ligne|
sykaaa рабочее зеркало
Website https://remonttermexov.ru/ .
Ich bin abhangig von SpinBetter Casino, es liefert ein Abenteuer voller Energie. Es wartet eine Fulle spannender Optionen, mit aufregenden Sportwetten. Der Support ist 24/7 erreichbar, verfugbar rund um die Uhr. Die Gewinne kommen prompt, ab und an zusatzliche Freispiele waren ein Highlight. Alles in allem, SpinBetter Casino ist absolut empfehlenswert fur Casino-Liebhaber ! Daruber hinaus die Navigation ist kinderleicht, gibt den Anreiz, langer zu bleiben. Besonders toll die Sicherheit der Daten, die das Spielen noch angenehmer machen.
spinbettercasino.de|
I’m drawn to Wazamba Casino, it provides a thrilling journey. The array of titles is vast, compatible with crypto for seamless play. The welcome bonus is generous. Ensuring smooth gameplay. Withdrawals are processed quickly, though more frequent promotions could enhance it. Overall, Wazamba Casino provides guaranteed enjoyment for casino enthusiasts ! Moreover the platform is visually stunning, deepens immersion in the game. One more highlight tournaments for competitive play, fostering a community feel.
{{https://wazambagr.com/|wazambagr.com}|
Je suis emerveille par Locowin Casino, ca offre un thrill incomparable. La selection de jeux est spectaculaire, incluant des paris sportifs palpitants. Amplifiant l’experience initiale. L’equipe de support est remarquable, avec une aide precise et rapide. Le processus est simple et reibungslos, de temps en temps des offres plus genereuses ajouteraient de l’attrait. En bref, Locowin Casino est indispensable pour les joueurs pour les joueurs en quete d’excitation ! De plus la navigation est simple et plaisante, facilite une immersion totale. Particulierement interessant les options de paris sportifs variees, offre des recompenses continues.
Explorer les dГ©tails|
J’apprecie l’environnement de Locowin Casino, on detecte une vibe folle. Le repertoire est opulent et multifacette, proposant des jeux de table immersifs. Le bonus d’accueil est attractif. Le service est operationnel 24/7, accessible a tout instant. Les benefices arrivent sans latence, bien que des bonus plus diversifies seraient souhaitables. Globalement, Locowin Casino garantit du divertissement constant pour les joueurs a la recherche d’aventure ! A mentionner la navigation est simple et engageante, facilite une immersion complete. Particulierement attractif le programme VIP avec des niveaux exclusifs, offre des privileges sur mesure.
VГ©rifier le site|
J’ai un veritable engouement pour Locowin Casino, il delivre une experience unique. La diversite des titres est epoustouflante, incluant des paris sportifs electrisants. Renforcant l’experience de depart. Les agents reagissent avec promptitude, toujours pret a intervenir. Les benefices arrivent sans latence, de temps a autre quelques tours gratuits supplementaires seraient apprecies. En fin de compte, Locowin Casino fournit une experience ineffacable pour les joueurs a la recherche d’aventure ! De surcroit la plateforme est esthetiquement remarquable, stimule le desir de revenir. A souligner aussi les tournois periodiques pour la rivalite, qui stimule l’engagement.
Explorer davantage|
Sou viciado em PlayPIX Casino, proporciona uma aventura eletrizante. Ha uma explosao de jogos emocionantes, com slots de design inovador. Fortalece seu saldo inicial. O servico esta disponivel 24/7, oferecendo respostas claras. Os pagamentos sao seguros e fluidos, embora mais promocoes regulares seriam otimas. Para concluir, PlayPIX Casino vale uma visita epica para jogadores em busca de adrenalina ! Vale notar a plataforma e visualmente espetacular, facilita uma imersao total. Outro destaque as opcoes variadas de apostas esportivas, proporciona vantagens personalizadas.
Ir ver|
ауф казино
I’m drawn to Wazamba Casino, it seems like a whirlwind of delight. The array of titles is vast, with sports betting for added thrill. The welcome bonus is generous. Ensuring smooth gameplay. Withdrawals are processed quickly, occasionally additional bonuses might be welcome. In conclusion, Wazamba Casino is a platform that excels for players seeking adventure ! In addition the platform is visually stunning, which heightens the fun of every session. Especially great crypto-friendly banking options, fostering a community feel.
https://wazambagr.com/|
Estou completamente empolgado com BETesporte Casino, sinto uma energia de estadio. O catalogo e rico e diversificado, incluindo apostas esportivas palpitantes. Eleva a experiencia de jogo. Os agentes respondem com velocidade, oferecendo respostas claras. Os saques sao rapidos como um sprint, contudo bonus mais variados seriam um gol. Para finalizar, BETesporte Casino oferece uma experiencia inesquecivel para fas de cassino online ! Acrescentando que a navegacao e intuitiva e rapida, aumenta o prazer de apostar. Um diferencial importante os torneios regulares para rivalidade, assegura transacoes confiaveis.
Ver a pГЎgina|
**mindvault**
mindvault is a premium cognitive support formula created for adults 45+. It’s thoughtfully designed to help maintain clear thinking
Τα online καζίνο αποτελούν σήμερα μια από τις πιο δημοφιλείς μορφές ψυχαγωγίας στην Ελλάδα. Η αγάπη των Ελλήνων παικτών για αυτή τη μορφή διασκέδασης μεγαλώνει συνεχώς, και μαζί με αυτή την αύξηση, πολλαπλασιάζονται και οι επιλογές σε διαδικτυακά καζίνο. Αν θέλεις να βρεις τα καλύτερα και πιο ασφαλή καζίνο για να παίξεις, είναι σημαντικό να ξέρεις πώς να ξεχωρίζεις τις αξιόπιστες πλατφόρμες από τις υπόλοιπες. Στο παρακάτω άρθρο θα βρεις χρήσιμες πληροφορίες και συμβουλές για να κάνεις την καλύτερη επιλογή και να απολαύσεις το παιχνίδι με ασφάλεια και διασκέδαση.
криптобосс казино
Website https://useit2.ru/.
https://b-s2site.at
риобет официальный сайт
Компьютеры становятся умнее людей kra 40 at kra 40 cc kra 40cc
Je suis accro a Locowin Casino, il offre une experience unique. Les options sont incroyablement vastes, proposant des jeux de table immersifs. Accompagne de tours gratuits sans wager. L’assistance est efficace et pro, toujours pret a aider. Les gains arrivent sans delai, neanmoins quelques tours gratuits en plus seraient cool. En bref, Locowin Casino vaut largement le detour pour les fans de casino en ligne ! De plus le site est rapide et attrayant, ce qui rend chaque session encore plus fun. Particulierement interessant les options de paris sportifs variees, offre des recompenses continues.
Visiter le site|
J’ai un engouement sincere pour Locowin Casino, ca fournit un plaisir intense. Le repertoire est opulent et multifacette, proposant des jeux de table immersifs. Doublement des depots jusqu’a 1850 €. Les agents reagissent avec promptitude, toujours pret a intervenir. Les benefices arrivent sans latence, mais des bonus plus diversifies seraient souhaitables. Tout compte fait, Locowin Casino fournit une experience ineffacable pour les aficionados de jeux contemporains ! Ajoutons que la navigation est simple et engageante, ce qui eleve chaque session a un niveau superieur. Un plus significatif les paiements securises en crypto, offre des privileges sur mesure.
Apprendre ici|
Je suis totalement seduit par Locowin Casino, ca fournit un plaisir intense. La diversite des titres est epoustouflante, avec des slots au style innovant. Associe a des tours gratuits sans wager. L’equipe d’assistance est remarquable, accessible a tout instant. Les retraits sont realises promptement, bien que des bonus plus diversifies seraient souhaitables. Tout compte fait, Locowin Casino est une plateforme qui excelle pour les enthousiastes de casino en ligne ! De surcroit l’interface est intuitive et raffinee, intensifie le plaisir du jeu. Particulierement attractif les paiements securises en crypto, garantit des transactions securisees.
Ouvrir le site maintenant|
J’ai un coup de foudre pour Locowin Casino, c’est une plateforme qui bouillonne d’energie. La variete des titres est impressionnante, comprenant des jeux compatibles avec les cryptos. Pour un demarrage en force. Le suivi client est irreprochable, avec une aide precise et rapide. Les transactions sont fiables et rapides, cependant des bonus plus varies seraient bienvenus. Pour conclure, Locowin Casino garantit du fun a chaque instant pour les amateurs de sensations fortes ! Ajoutons que l’interface est intuitive et stylee, ce qui rend chaque session encore plus fun. Un plus non negligeable les evenements communautaires engageants, propose des avantages personnalises.
Entrer|
Website https://cardsfm.ru/ .
Website https://photo-res.ru/ .
Je suis fascine par Locowin Casino, ca fournit un plaisir intense. La gamme de jeux est spectaculaire, incluant des paris sportifs electrisants. Renforcant l’experience de depart. Les agents reagissent avec promptitude, avec une assistance exacte et veloce. Les benefices arrivent sans latence, bien que des offres plus liberales ajouteraient de la valeur. Globalement, Locowin Casino merite une exploration approfondie pour les adeptes de sensations intenses ! Ajoutons que le site est veloce et seduisant, ce qui eleve chaque session a un niveau superieur. Particulierement attractif le programme VIP avec des niveaux exclusifs, garantit des transactions securisees.
Aller sur le web|
J’aime l’atmosphere de Locowin Casino, c’est une plateforme qui explose d’energie. La gamme de jeux est spectaculaire, comprenant des jeux adaptes aux cryptos. Associe a des tours gratuits sans wager. Le suivi est exemplaire, toujours pret a intervenir. Les paiements sont proteges et lisses, mais des offres plus liberales ajouteraient de la valeur. Globalement, Locowin Casino merite une exploration approfondie pour ceux qui parient en crypto ! Ajoutons que le design est contemporain et lisse, facilite une immersion complete. Un autre avantage cle le programme VIP avec des niveaux exclusifs, renforce le sens de communaute.
VГ©rifier la liste complГЁte|
Автоматические гаражные ворота давно перестали быть роскошью и стали необходимым элементом комфортной жизни. Наши автоматические ворота сочетают надёжность проверенных европейских механизмов с элегантным дизайном, который гармонично впишется в архитектуру любого здания. Мы предлагаем полный цикл услуг: от профессиональной консультации и точного замера до установки под ключ и гарантийного обслуживания. Доверьте безопасность своего дома профессионалам — получите бесплатный расчёт стоимости уже сегодня: Читать
Curto demais a energia de BR4Bet Casino, parece um festival de luzes cheio de adrenalina. A selecao de titulos e uma chama de emocoes. com slots tematicos de aventuras radiantes. O time do cassino e digno de um faroleiro. assegurando apoio sem sombras. Os pagamentos sao seguros e fluidos. mas mais giros gratis seriam brilhantes. Em sintese, BR4Bet Casino garante um jogo que reluz como um farol para os faroleiros do cassino! Adicionalmente o layout e vibrante como uma tocha. dando vontade de voltar como uma chama eterna.
bГґnus br4bet|
Je suis envoute par Simsinos Casino, resonne avec un rythme de casino anime. Les options de jeu au casino sont riches et colorees. incluant des tables qui vibrent comme un storyboard. Le personnel du casino offre un accompagnement digne d’un scenariste. joignable par chat ou email. se deroulent comme une rhapsodie de dessins. cependant plus de bonus pour une harmonie dessinee. Au final, Simsinos Casino promet un divertissement de casino anime pour les joueurs qui aiment parier avec style au casino! Par ailleurs la plateforme du casino brille par son style anime. facilite une experience de casino dessinee.
simsinos casino login|
Galera, preciso compartilhar minha experiencia no 4PlayBet Casino porque me impressionou bastante. A variedade de jogos e muito completa: blackjack envolvente, todos com graficos de primeira. O suporte foi atencioso, responderam em minutos pelo chat, algo que passa seguranca. Fiz saque em cartao e o dinheiro entrou em minutos, ponto fortissimo. Se tivesse que criticar, diria que faltam bonus extras, mas isso nao estraga a experiencia. Enfim, o 4PlayBet Casino vale demais a pena. Vale experimentar.
4play video|
Sou viciado em PlayPIX Casino, leva a um universo de pura adrenalina. O catalogo e rico e multifacetado, com slots de design inovador. 100% ate €500 + rodadas gratis. O servico esta disponivel 24/7, acessivel a qualquer momento. As transacoes sao confiaveis, contudo promocoes mais frequentes dariam um toque extra. Para finalizar, PlayPIX Casino e essencial para jogadores para jogadores em busca de adrenalina ! Alem disso o site e rapido e cativante, tornando cada sessao mais vibrante. Outro destaque os pagamentos seguros em cripto, oferece recompensas continuas.
Ler mais|
Me encantei pelo ritmo de BR4Bet Casino, pulsa com uma forca de cassino digna de um holofote. A colecao e um facho de diversao. com slots tematicos de aventuras radiantes. O atendimento esta sempre ativo 24/7. assegurando apoio sem sombras. Os pagamentos sao lisos como uma chama. em alguns momentos mais giros gratis seriam brilhantes. Ao final, BR4Bet Casino promete uma diversao que e uma chama para os faroleiros do cassino! E mais a navegacao e facil como um facho de luz. dando vontade de voltar como uma chama eterna.
br4bet com baixar|
Fiquei fascinado com BETesporte Casino, proporciona uma aventura eletrizante. Ha uma explosao de jogos emocionantes, com sessoes ao vivo cheias de energia. O bonus de boas-vindas e empolgante. Os agentes respondem com rapidez, garantindo atendimento de alto nivel. Os saques sao rapidos como um contra-ataque, embora recompensas extras seriam um hat-trick. Em sintese, BETesporte Casino vale uma aposta certa para amantes de apostas esportivas ! Vale destacar o site e veloz e envolvente, adiciona um toque de estrategia. Igualmente impressionante os torneios regulares para rivalidade, fortalece o senso de comunidade.
Ir para o site|
Me encantei pelo drible de MarjoSports Casino, pulsa com uma forca de cassino digna de um craque. O catalogo de jogos e um campo de emocoes. com caca-niqueis modernos que driblam como craques. O time do cassino e digno de um tecnico. garantindo suporte direto e sem impedimentos. Os pagamentos sao seguros e fluidos. mas mais giros gratis seriam uma loucura de torcida. Na real, MarjoSports Casino e uma quadra de emocoes para os amantes de cassinos online! Como extra o visual e uma explosao de quadras. dando vontade de voltar como um craque.
chat marjosports whatsapp|
Galera, resolvi contar como foi no 4PlayBet Casino porque me impressionou bastante. A variedade de jogos e simplesmente incrivel: roletas animadas, todos rodando lisos. O suporte foi bem prestativo, responderam em minutos pelo chat, algo que vale elogio. Fiz saque em PIX e o dinheiro entrou mais ligeiro do que imaginei, ponto fortissimo. Se tivesse que criticar, diria que senti falta de ofertas recorrentes, mas isso nao estraga a experiencia. No geral, o 4PlayBet Casino e parada obrigatoria pra quem gosta de cassino. Ja virou parte da minha rotina.
office 4play ebony|
Tenho uma paixao ardente por PlayPIX Casino, oferece um prazer eletrizante. A selecao de jogos e fenomenal, com slots de design inovador. 100% ate €500 + rodadas gratis. O suporte ao cliente e excepcional, com suporte rapido e preciso. As transacoes sao confiaveis, de vez em quando ofertas mais generosas seriam bem-vindas. Resumindo, PlayPIX Casino vale uma visita epica para fas de cassino online ! Tambem a navegacao e intuitiva e envolvente, instiga a prolongar a experiencia. Um diferencial significativo os torneios regulares para competicao, assegura transacoes confiaveis.
https://playpixcasino.pro/|
J’ai un coup de foudre pour Locowin Casino, c’est une plateforme qui bouillonne d’energie. Le catalogue est riche et diversifie, avec des slots au design innovant. Doublement des depots jusqu’a 1850 €. Le support client est exceptionnel, garantissant un support de qualite. Les gains arrivent sans delai, parfois quelques tours gratuits en plus seraient cool. En bref, Locowin Casino offre une experience memorable pour les fans de casino en ligne ! Cerise sur le gateau l’interface est intuitive et stylee, ajoute une touche de confort. A noter egalement les tournois reguliers pour la competition, offre des recompenses continues.
Aller au site|
J’ai une passion debordante pour Casinia Casino, il offre une aventure etincelante. La diversite des titres est eblouissante, incluant des paris sportifs palpitants. 100% jusqu’a 500 € + 200 tours gratuits. Le suivi est irreprochable, joignable a toute heure. Les retraits filent comme une comete, parfois des bonus plus varies brilleraient davantage. En somme, Casinia Casino est un joyau pour les joueurs pour les passionnes de frissons lumineux ! A noter l’interface est fluide comme un rayon, intensifie l’eclat du jeu. Un avantage notable le programme VIP avec 5 niveaux exclusifs, cree une communaute vibrante.
Obtenir plus|
J’ai un coup de foudre pour Locowin Casino, ca transporte dans un monde captivant. La variete des titres est impressionnante, proposant des jeux de table immersifs. Amplifiant l’experience initiale. L’assistance est efficace et pro, avec une aide precise et rapide. Les gains arrivent sans delai, mais quelques tours gratuits en plus seraient cool. Pour conclure, Locowin Casino est une plateforme qui dechire pour les passionnes de jeux modernes ! En prime la navigation est simple et agreable, ajoute une touche de confort. Egalement appreciable les tournois reguliers pour la competition, offre des recompenses continues.
Continuer ici|
Je suis accro a Locowin Casino, c’est une plateforme qui bouillonne d’energie. Le catalogue est riche et diversifie, proposant des jeux de table immersifs. Accompagne de tours gratuits sans wager. Les agents repondent avec rapidite, toujours pret a aider. Les paiements sont securises et fluides, parfois plus de promos regulieres seraient top. Au final, Locowin Casino offre une experience memorable pour les amateurs de sensations fortes ! En prime la plateforme est visuellement top, amplifie le plaisir de jouer. Un plus non negligeable les tournois reguliers pour la competition, assure des transactions fiables.
Entrer sur le site web|
Sou viciado no fluxo de Brazino Casino, oferece uma aventura que flui como uma onda cristalina. O catalogo de jogos e um oceano de prazeres. com caca-niqueis modernos que nadam como peixes tropicais. O atendimento e solido como um coral. assegurando apoio sem turbulencia aquatica. Os saques voam como uma arraia. entretanto mais bonus regulares seriam aquaticos. Ao final, Brazino Casino e o point perfeito pros fas de cassino para quem curte apostar com estilo aquatico! Alem disso o layout e vibrante como uma perola. criando uma experiencia de cassino subaquatica.
brazino777 mГ©xico|
Je suis totalement envoute par Casinia Casino, ca transporte dans un palais scintillant. La diversite des titres est eblouissante, incluant des paris sportifs palpitants. Avec un Bonus Crab unique pour debuter. Le service est disponible 24/7, garantissant un service etincelant. Les retraits filent comme une comete, de temps a autre des offres plus genereuses seraient un plus. Dans l’ensemble, Casinia Casino est un joyau pour les joueurs pour les joueurs en quete d’eclat ! De plus la navigation est intuitive comme une lueur, ce qui rend chaque session plus eclatante. A souligner aussi les evenements communautaires captivants, cree une communaute vibrante.
Voir les nouveautГ©s|
Acho simplesmente ardente Verabet Casino, pulsa com uma forca de cassino digna de um xama. A colecao e um ritual de entretenimento. com caca-niqueis modernos que hipnotizam como fogos. O suporte e um fulgor reluzente. disponivel por chat ou e-mail. O processo e claro e sem fumaca. ocasionalmente mais bonus seriam um diferencial ardente. Na real, Verabet Casino e o point perfeito pros fas de cassino para os apaixonados por slots modernos! De bonus a interface e fluida e brilha como uma fogueira. tornando cada sessao ainda mais flamejante.
vera bet paga mesmo|
Me encantei pelo fulgor de Fogo777 Casino, tem um ritmo de jogo que danca como labaredas. O leque do cassino e um fogo de delicias. com caca-niqueis modernos que hipnotizam como fogos. Os agentes voam como chamas. garantindo suporte direto e sem cinzas. As transacoes sao simples como uma tocha. entretanto queria mais promocoes que queimam como fogueiras. Na real, Fogo777 Casino vale explorar esse cassino ja para quem curte apostar com estilo flamejante! Alem disso a interface e fluida e brilha como uma fogueira. elevando a imersao ao nivel de um ritual.
fogo777.bet|
Je suis accro a Locowin Casino, ca transporte dans un monde captivant. La variete des titres est impressionnante, proposant des jeux de table immersifs. Amplifiant l’experience initiale. Le support client est exceptionnel, joignable a toute heure. Les transactions sont fiables et rapides, mais des bonus plus varies seraient bienvenus. En bref, Locowin Casino est un incontournable pour les joueurs pour les amateurs de sensations fortes ! Cerise sur le gateau la plateforme est visuellement top, donne envie de prolonger l’experience. Un autre atout majeur les options de paris sportifs variees, propose des avantages personnalises.
Lire maintenant|
Je suis accro a BankOnBet Casino, ca vibre avec une richesse de jeu qui s’empile. The game lineup is a fortune of thrills. with slots that stack wins like bills. Le personnel du casino offre un accompagnement digne d’un gestionnaire. avec une aide qui debloque les gains. Les gains du casino arrivent a une vitesse bancaire. cependant des bonus plus reguliers seraient profitables. En somme, BankOnBet Casino promet un jeu qui fructifie pour those chasing smart stakes! Par ailleurs le design est elegant comme un vault. facilite une experience de casino rentable.
bankonbet bonusovГЅ kГіd|
Fiquei fascinado com PlayPIX Casino, oferece um prazer intenso e indomavel. O catalogo e exuberante e diversificado, suportando jogos compativeis com criptomoedas. O bonus de boas-vindas e cativante. Os agentes respondem com rapidez, acessivel a qualquer momento. Os pagamentos sao seguros e fluidos, contudo recompensas extras seriam eletrizantes. No geral, PlayPIX Casino oferece uma experiencia memoravel para jogadores em busca de adrenalina ! Alem disso a interface e fluida e estilosa, adiciona um toque de conforto. Notavel tambem os pagamentos seguros em cripto, oferece recompensas continuas.
Ler mais|
Five Killer Quora Answers On Automatic Vacuum Cleaner automatic vacuum Cleaner
Sou viciado no fluxo de Brazino Casino, e uma mare de diversao que brilha como perolas. A selecao de titulos e uma correnteza de emocoes. com caca-niqueis modernos que nadam como peixes tropicais. O time do cassino e digno de um capitao de navio. disponivel por chat ou e-mail. As transacoes sao simples como uma bolha. em alguns momentos mais giros gratis seriam uma loucura marinha. Resumindo, Brazino Casino e o point perfeito pros fas de cassino para os exploradores de jogos online! Por sinal a navegacao e facil como uma corrente marinha. elevando a imersao ao nivel de um oceano.
rollover brazino777|
Its wonderful as your other blog posts : D, regards for putting up.
Curto demais a chama de Verabet Casino, e um cassino online que queima como uma fogueira ancestral. A colecao e um ritual de entretenimento. com slots tematicos de cerimonias antigas. O suporte e uma tocha de eficiencia. oferecendo respostas claras como uma chama. As transacoes sao faceis como um fulgor. de vez em quando mais giros gratis seriam incendiarios. Em resumo, Verabet Casino oferece uma experiencia que e puro ritual para os amantes de cassinos online! Vale dizer o layout e vibrante como uma tocha. adicionando um toque de fogo ao cassino.
vera .bet|
Sou louco pela fornalha de Fogo777 Casino, parece um festival de chamas cheio de adrenalina. As opcoes sao ricas e queimam como carvoes. oferecendo sessoes ao vivo que brilham como labaredas. O suporte e um fulgor reluzente. respondendo veloz como uma faisca. Os pagamentos sao lisos como uma pira. ocasionalmente mais recompensas fariam o coracao queimar. Ao final, Fogo777 Casino e uma pira de adrenalina para os amantes de cassinos online! De bonus a plataforma reluz com um visual ritualistico. fazendo o cassino queimar como uma fogueira.
fogo777. com|
Website https://tione.ru/ .
Fiquei impressionado com BETesporte Casino, oferece um prazer esportivo inigualavel. Ha uma explosao de jogos emocionantes, suportando jogos compativeis com criptomoedas. Eleva a experiencia de jogo. O servico esta disponivel 24/7, oferecendo respostas claras. O processo e simples e direto, embora mais apostas gratis seriam incriveis. No geral, BETesporte Casino oferece uma experiencia inesquecivel para quem usa cripto para jogar ! Adicionalmente o site e veloz e envolvente, instiga a prolongar o jogo. Outro destaque os pagamentos seguros em cripto, fortalece o senso de comunidade.
Navegar no site|
Fiquei fascinado com PlayPIX Casino, sinto um pulsar selvagem. A selecao de jogos e fenomenal, com slots de design inovador. O bonus de boas-vindas e cativante. O suporte ao cliente e excepcional, sempre pronto para resolver. Os ganhos chegam sem atraso, as vezes promocoes mais frequentes dariam um toque extra. Para finalizar, PlayPIX Casino oferece uma experiencia memoravel para entusiastas de jogos modernos ! Acrescentando que o site e rapido e cativante, facilita uma imersao total. Notavel tambem o programa VIP com niveis exclusivos, assegura transacoes confiaveis.
https://playpixcasino.pro/|
можно ли купить диплом медсестры можно ли купить диплом медсестры .
гребной тренажер для дома Эллиптический тренажер Proxima — надежный и доступный от бренда CardioPower. Модели вроде Proxima Diana имеют 8-16 уровней магнитной нагрузки, шаг 36 см, тихий привод. LED-дисплей с 12 программами, измерением пульса и восстановлением. Эргономичные педали и рукоятки для комфорта, вес 32 кг, нагрузка 110 кг. Складная рама с транспортировочными колесами. Пользователи ценят стабильность и простоту сборки. Идеален для начинающих, укрепляет ноги, руки и кор. Цена 18 000-30 000 рублей, гарантия 1 год. Proxima помогает в кардиотренировках, повышая выносливость без травм.
Представляем вашему вниманию национальные парки и заповедники России.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, там просто кладезь информации.
Ссылка ниже:
https://alloopt.ru
Что думаете о красоте природы России? Делитесь мнениями!
https://bsm-e.at
женский фитнес клуб в москве новый фитнес клуб
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
Особенно понравился материал про Изучение ООПТ России: парки, заповедники, водоемы.
Вот, делюсь ссылкой:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
Компания специализируется на нерудные материалы цена, что делает ее лидером в сфере поставок сыпучих материалов для строительной отрасли.
играют ключевую роль в современном строительстве . Они применяются для создания различных строительных конструкций . Кроме того, нерудные материалы должны быть безопасны для использования.
Нерудные материалы могут быть использованы в различных условиях. Они могут быть применены в различных сферах промышленности . Кроме того, нерудные материалы должны быть применены с учетом условий эксплуатации.
Нерудные материалы могут быть классифицированы по своим свойствам и характеристикам . Они могут быть использованы для создания уникальных дизайнов. Кроме того, нерудные материалы должны быть сертифицированы соответствующими органами .
Нерудные материалы имеют свои уникальные свойства и характеристики . Они могут быть применены в различных сферах промышленности . Кроме того, нерудные материалы должны быть применены с учетом условий эксплуатации.
Нерудные материалы применяются в различных сферах промышленности . Они могут быть использованы для создания инновационных решений. Кроме того, нерудные материалы должны быть сертифицированы соответствующими органами .
Нерудные материалы имеют свои уникальные свойства и характеристики . Они могут быть использованы для создания уникальных дизайнов . Кроме того, нерудные материалы должны быть использованы с учетом их свойств и характеристик .
Нерудные материалы будут применяться в различных сферах промышленности. Они могут быть применены в различных отраслях промышленности . Кроме того, нерудные материалы должны быть выбраны с учетом требований проекта .
Нерудные материалы будут иметь новые свойства и характеристики . Они могут быть применены в различных сферах промышленности . Кроме того, нерудные материалы должны быть использованы с учетом их свойств и характеристик .
Для тех, кто интересуется нумерологией по дате рождения, существует возможность нумерология по дате рождения рассчитать бесплатно, что может открыть новые перспективы в понимании себя и своих жизненных целей.
Нумерология по дате рождения является особым инструментом, дающим людям возможность разобраться в своих сильных и слабых сторонах . Этот метод основан на простой, но глубокой идее, что числа, составляющие дату рождения человека, могут раскрыть информацию о его характере, талантах и потенциале. Нумерология по дате рождения имеет свои корни в древних культурах и была разными народами использована для предсказания будущего и понимания настоящего . Люди, изучающие нумерологию, могут получить ценную информацию о своих жизненных путях и сделать прогнозы на будущее .
Нумерология по дате рождения включает в себя расчет чисел, которые могут раскрыть информацию о характере и потенциале человека . Число жизни является одним из наиболее важных чисел в нумерологии, поскольку оно определяет общий тон и направление жизни человека . Нумерология по дате рождения основана на анализе месяца и года рождения, что может дать представление о будущем человека.
Числа в нумерологии являются ключевыми элементами, которые могут помочь людям понять свою судьбу. Каждое число в нумерологии имеет свое особое значение и может раскрыть информацию о будущем человека . Нумерология по дате рождения основана на анализе чисел от 1 до 9, которые могут раскрыть информацию о будущем человека . Число 1 в нумерологии является числом человека, который имеет сильную волю и может добиться успеха .
Нумерология по дате рождения также включает в себя анализ мастер-чисел, таких как 11 и 22, которые могут дать информацию о характере и потенциале человека . Мастер-числа в нумерологии имеют особое значение и могут дать информацию о характере и потенциале человека . Нумерология по дате рождения может помочь людям понять свое предназначение и сделать прогнозы на будущее .
Нумерология по дате рождения может быть применена в различных областях жизни, таких как бизнес, отношения и карьера . Нумерология по дате рождения может помочь людям понять свои сильные и слабые стороны, что может быть полезно в отношениях и личной жизни . Нумерология по дате рождения также может быть использована для понимания совместимости между людьми, что может быть полезно в отношениях и браке .
Нумерология по дате рождения может дать представление о будущем человека, что может быть полезно в планировании жизни . Нумерология по дате рождения основана на анализе чисел, которые могут раскрыть информацию о будущем человека . Нумерология по дате рождения может быть интересным и полезным инструментом для людей, которые хотят понять свою судьбу и сделать прогнозы на будущее .
Нумерология по дате рождения дает людям возможность проанализировать свою судьбу и сделать правильные выборы в жизни . Нумерология по дате рождения основана на простой, но глубокой идее, что числа, составляющие дату рождения человека, могут раскрыть информацию о его характере, талантах и потенциале . Люди, изучающие нумерологию, могут получить ценную информацию о своих жизненных путях и сделать прогнозы на будущее .
Футбол күйөрмандары Гарри Кейндей оюнчуну сыйлашат.Анын командалык иши да, жеке чеберчилиги да мыкты. Атактуу англиялык чабуулчу тууралуу көбүрөөк билүү үчүн кир: https://harry-kane-kg.com/. Анын карьерасындагы ийгиликтер мактоого арзыйт.
Кейндин трансфери чоң көңүл бурдурган.
Кейн үй-бүлөлүк баалуулуктарды жогору коёт. Ал талаада так позиция тандай билет. Анын ар бир голу эстен чыкпайт. Гарри Кейндин балалык сүрөттөрү интернетте көп. Ар бир күйөрман анын статистикасын сыймыктануу менен айтат. Анын келечеги жаркын көрүнөт.
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, нашел много полезного.
Вот, делюсь ссылкой:
https://alloopt.ru
Что думаете о красоте природы России? Делитесь мнениями!
Гарри Кейн ар дайым максатка умтулат.Гарри Кейндин PFA Premier League Team of the Year тизмесине киргени таң калычтуу эмес. Гарри Кейндин карьерасы жана трофейлери тууралуу кеңири маалымат ушул жерде: Гарри Кейн расмий сайты. Кейн Англиянын тарыхындагы эң жогорку бомбардирлердин бири.
Бул оюнчу кайсы жерде болбосун гол киргизе алат.
Кейндин жашоосу көптөр үчүн үлгү. Ал талаада так позиция тандай билет. Кейндин оюнун көрүү ырахат тартуулайт. Бул оюнчу ар дайым өнүгүүгө умтулган. Кейндин упай көрсөткүчү абдан жогору. Кейндин трансферлери ар дайым чоң темалар.
Футбол күйөрмандары Гарри Кейндей оюнчуну сыйлашат.Ар бир сезон Гарри Кейн жаңы деңгээлге чыгат. Футбол күйөрмандары бул сайттан акыркы жаңылыктарды окуй алышат: http://www.harry-kane-kg.com. Анын футбол стили классикалык жана эффективдүү.
Баварияда Кейн жаңы рекорддорду коюуда.
Кейн үй-бүлөсү менен көп убакыт өткөрөт. Кейндин карьерасы узак жана ийгиликтүү. Кейн ар бир сезон өзүн мыкты формада кармайт. Бул оюнчу ар дайым өнүгүүгө умтулган. Кейндин упай көрсөткүчү абдан жогору. Анын келечеги жаркын көрүнөт.
Website https://church-bench.ru/ .
blsp at Заинтересован, что будоражит тёмную сеть? Blacksprut — это не просто название, это эталон анонимности, оперативности и уверенности. Добро пожаловать на bs2best.at — место, где открывают то, о чём принято умалчивать. Здесь ты получишь доступ к запретному плоду. Только для избранных. Без улик. Без уступок. Только Blacksprut. Не упусти возможность стать первопроходцем — bs2best.at уже готов раскрыть свои секреты. Хватит ли тебе смелости взглянуть правде в лицо?
Для поклонников кино есть популярный сайт – КИНОГО (https://kinogo-kino1.biz/). Здесь доступна впечатляющая коллекция, где можно смотреть онлайн фильмы и сериалы 2025 и других годов бесплатно, в высоком качестве 1080p и без обязательной регистрации. На Kinogo вас ждут не просто премьеры, но и лучшая классика кино. Это – один из топовых киносайтов в своей нише.
Анын голдорунун статистикасы абдан таасирдүү.Ар бир оюну күйөрмандар үчүн майрам. Эгер Гарри Кейндин трансферлери кызыктырса, анда бул шилтемеге өт: harry-kane-kg.com. Кейн Англиянын тарыхындагы эң жогорку бомбардирлердин бири.
Кейн менен Бавария дагы күчтүү болуп калды.
Анын үй-бүлөсү ар дайым бактылуу көрүнөт. Гол киргизүүдө ал өзгөчө инстинктке ээ. Футбол дүйнөсүндө Гарри Кейн өз ордун тапкан. Анын дебюту футбол дүйнөсүн таң калтырган. Кейндин упай көрсөткүчү абдан жогору. Гарри Кейндин акыркы жаңылыктары кызыктуу.
kadıköy avukat tavsiye
Добро пожаловать в удивительный мир природы России!
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Ссылка ниже:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
официальные займы онлайн на карту бесплатно http://www.zaimy-26.ru/ .
Рекомендую почитать – https://kripta.forum.cool/viewtopic.php?id=1495#p4848 .
Представляем вашему вниманию национальные парки и заповедники России.
Для тех, кто ищет информацию по теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Ссылка ниже:
[url=https://alloopt.ru]https://alloopt.ru[/url]
Природа – наш главный учитель и защитник. Берегите её!
Training of XRumer Xevil software for seo
I teach how to make link mass on the site or social networking software XRumer.
The training includes :
1. Installation, server setup, download XRumer and Xevil on the server.
2. Setting up to work in posting mode!
3. Setting up XRumer for mailing to contact forms, which XRumer does perfectly.
4. Setting up Xevil.
5. Talking about what XRumer is and what it is for and how to interact with it in seo
Show sites where to take proxies, VPS service
I balance (optimize) crumer, Xevil and server for effective work.
I work on the 6th version of Xevil
Here’s the plan!
Install XRumer on a remote server (personal computer is not suitable for work)
I show you the settings for the work and make a project
Posting will be made in blogs and comments forums, Setting up a project with article placement (near-link text changes from the source alternately) that is important.
Collection of the base in the training is not included.
See additional options!!!
Website https://ipodtouch3g.ru/ .
Cпециализируемся на правовой защите для автовладельцев Санкт-Петербурга. Мы успешно решаем спорами со страховыми компаниями. Наши специалисты обладают глубокими знаниями законодательства. Мы гарантируем конфиденциальность. Узнайте больше о наших услугах. https://avtoyristivspb.ru/
Кейндин оюндары дайыма эмоция тартуулайт.Кейндин эмгеги жана дисциплинасы өзгөчө. Футбол күйөрмандары бул сайттан акыркы жаңылыктарды окуй алышат: http://www.harry-kane-kg.com. Анын футбол стили классикалык жана эффективдүү.
Бул оюнчу кайсы жерде болбосун гол киргизе алат.
Анын жубайы Кэти Гудленд аны колдойт. Кейндин пас берүү жөндөмү да жогорку деңгээлде. Кейн ар бир сезон өзүн мыкты формада кармайт. Гарри Кейндин балалык сүрөттөрү интернетте көп. Анын карьерасындагы командалар көп. Гарри Кейндин акыркы жаңылыктары кызыктуу.
https://www.e-osetia.ru/news/biznes/glavnaya-ulitsa-sochi-vsye-o-kurortnom-prospekte/
video experience
Вас интересуют природные богатства России? Давайте исследуем их вместе!
Для тех, кто ищет информацию по теме “Изучение ООПТ России: парки, заповедники, водоемы”, там просто кладезь информации.
Вот, можете почитать:
https://alloopt.ru
Надеюсь, вы нашли это путешествие по природе познавательным.
Deneme bonusu veren siteler listemizle ücretsiz bonus fırsatlarını yakalayın. Yeni peneme ponusu peren piteler üyeler için güncel deneme bonusu burada.
Рекомендую почитать – https://klubveles.forum24.ru/?1-9-0-00000128-000-0-0-1760293920 .
Curto demais a energia de BR4Bet Casino, vibra como um farol em alto-mar. A colecao e um facho de diversao. com slots tematicos de aventuras radiantes. Os agentes voam como claroes. garantindo suporte direto e sem escuridao. Os saques voam como um facho de luz. as vezes queria mais promocoes que brilham como farois. Em sintese, BR4Bet Casino e uma fogueira de adrenalina para quem curte apostar com estilo iluminado! E mais a plataforma reluz com um visual brilhante. adicionando um toque de luz ao cassino.
baixar app br4bet|
Добро пожаловать в удивительный мир природы России!
Между прочим, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, загляните сюда.
Смотрите сами:
https://alloopt.ru
Надеюсь, вы нашли это путешествие по природе познавательным.
онлайн трансляция на мероприятии онлайн трансляция на мероприятии .
студия трансляций http://zakazat-onlayn-translyaciyu1.ru/ .
Acho simplesmente insano OshCasino, e um cassino online que detona como um vulcao. As opcoes de jogo no cassino sao ricas e incendiarias, com slots de cassino unicos e explosivos. O atendimento ao cliente do cassino e uma faisca de eficiencia, respondendo mais rapido que um relampago. As transacoes do cassino sao simples como uma brisa, mesmo assim mais giros gratis no cassino seria uma loucura. Na real, OshCasino oferece uma experiencia de cassino que e puro fogo para os amantes de cassinos online! Alem disso a navegacao do cassino e facil como uma trilha vulcanica, da um toque de calor brabo ao cassino.
osh application|
займер ру займер ру .
Amo a atmosfera de BETesporte Casino, sinto uma energia de estadio. A variedade de titulos e impressionante, com sessoes ao vivo imersivas. Fortalece seu saldo inicial. A assistencia e eficiente e profissional, acessivel a qualquer hora. As transacoes sao confiaveis, embora bonus mais variados seriam um gol. Em sintese, BETesporte Casino e indispensavel para apostadores para entusiastas de jogos modernos ! Tambem o site e veloz e envolvente, instiga a prolongar o jogo. Notavel tambem os torneios regulares para rivalidade, fortalece o senso de comunidade.
Ler mais|
В качестве заядлого киномана с удовольствием делюсь моим главным фаворитом в мире кино – это КИНОГО (https://kinogo-kino2.biz/). В его архивах сосредоточено колоссальное число киноматериалов. Все без исключения свежие релизы 2025 года уже доступны к просмотру Kinogo, всегда в безупречном качестве и полностью бесплатно. Никакая регистрация не нужна.
Cilt bak?m?na dair dogal guzellik s?rlar?n? ogrenmeye haz?r m?s?n?z?
Moda ve Stil Rehberi: En Yeni Trendler ve Kombinler hakk?ndaki bolum dikkatimi cekti.
Asag?daki linke bakabilirsiniz:
https://modaruhu.com
Cilt bak?m?n?n buyusu ile tan?s?n ve hayat?n?za kazand?r?n.
Начнем путешествие по магическим уголкам российских заповедников.
Между прочим, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Вот, можете почитать:
https://alloopt.ru
Надеюсь, вы нашли это путешествие по природе познавательным.
Sou viciado no brilho de BR4Bet Casino, tem uma energia de jogo tao ardente quanto uma fogueira a meia-noite. A colecao e um facho de diversao. oferecendo lives que acendem como fogueiras. O atendimento e solido como um farol. garantindo suporte direto e sem escuridao. O processo e claro e sem apagoes. mas as ofertas podiam ser mais generosas. Na real, BR4Bet Casino e o point perfeito pros fas de cassino para os amantes de cassinos online! De lambuja a interface e fluida e brilha como um farol. fazendo o cassino brilhar como um farol.
login br4bet login|
Acho simplesmente brabissimo MegaPosta Casino, da uma energia de cassino que e um vulcao. Tem uma enxurrada de jogos de cassino irados, com caca-niqueis de cassino modernos e eletrizantes. Os agentes do cassino sao rapidos como um estalo, acessivel por chat ou e-mail. Os pagamentos do cassino sao lisos e blindados, mas mais bonus regulares no cassino seria brabo. No fim das contas, MegaPosta Casino oferece uma experiencia de cassino que e puro fogo para os amantes de cassinos online! De lambuja a interface do cassino e fluida e cheia de energia explosiva, aumenta a imersao no cassino a mil.
megaposta.|
Ich liebe die Atmosphare von NV Casino, es liefert einen einzigartigen Kick. Das Angebot an Spielen ist phanomenal, mit Spielen, die perfekt fur Kryptos geeignet sind. Der Support ist von herausragender Qualitat, garantiert hochwertige Hilfe. Die Gewinne kommen ohne Verzogerung, ab und zu mehr abwechslungsreiche Boni waren willkommen. Alles in allem, NV Casino bietet unvergesslichen Spa? fur Spieler auf der Suche nach Action ! Hinzu die Navigation ist kinderleicht, gibt Lust auf mehr.
https://playnvcasino.de/|
Website – https://sankt-peterburg.forum2x2.ru/t23550-topic#84553 .
Estou completamente empolgado com BETesporte Casino, transporta para um mundo de apostas vibrante. Ha uma multidao de jogos emocionantes, com sessoes ao vivo imersivas. Fortalece seu saldo inicial. A assistencia e eficiente e profissional, com suporte preciso e rapido. O processo e simples e direto, de vez em quando mais apostas gratis seriam incriveis. Para finalizar, BETesporte Casino e uma plataforma que domina o campo para amantes de apostas esportivas ! Alem disso a interface e fluida e energetica, aumenta o prazer de apostar. Outro destaque os torneios regulares para rivalidade, fortalece o senso de comunidade.
Saiba mais|
Если вы ищете качественные семена различной марки, включая семяныч магазин, то вы можете найти их в специализированных магазинах или интернет-магазинах, предлагающих широкий ассортимент семян для различных культур.
Семяныч семена купить – это процесс, который требует внимания и ответственности . Это связано с тем, что семена являются основой для выращивания здоровых растений. Семена должны быть свежими и иметь высокий процент всхожести . Кроме того, семена необходимо проверять на наличие вредителей и заболеваний .
Семяныч семена необходимо выбирать с учетом сезона и типа почвы . Семена должны быть свежими и иметь высокий процент всхожести. Кроме того, семена должны быть сертифицированы и соответствовать стандартам качества.
Семяныч семена необходимо выбирать с учетом типа почвы и климата . Семена должны быть свежими и иметь высокий процент всхожести . Кроме того, семена должны быть сертифицированы и соответствовать стандартам качества.
Семяныч семена необходимо выбирать с учетом погодных условий и типа почвы. Семена должны быть свежими и иметь высокий процент всхожести . Кроме того, семена должны быть сертифицированы и соответствовать стандартам качества.
Cilt bak?m?na dair dogal guzellik s?rlar?n? ogrenmeye haz?r m?s?n?z?
Bu arada, eger Dogal Guzellik Yontemleri: Cilt ve Sac Bak?m? Ipuclar? ile ilgileniyorsan?z, buraya goz at?n.
Kendiniz bak?n:
https://ipekcilt.com
Dogal guzelliginizi koruyun ve her zaman en iyi versiyonunuz olun.
в этом разделе https://kra42at.at
Если вы ищете высококачественные семена для своего сада или коллекции, то интернет магазин семяныч предлагает широкий ассортимент семян от известных брендов и селекционеров, включая сорта, подходящие для разных климатических зон и типов почвы.
Можно найти множество предложений от разных продавцов и сравнить цены . Для начала нужно определиться с типом семян, которые необходимы В любом случае, перед покупкой нужно изучить характеристики семян. Семяныч семена купить можно и в специализированных магазинах И помочь в выборе нужных семян для конкретного климата и типа почвы .
Семяныч семена купить можно и на онлайн-площадках Это может помочь найти лучшее предложение. Семена можно купить и на рынках Это может быть хорошим вариантом для тех, кто ценит свежесть и качество семян. Также, перед покупкой семян, необходимо проверить сертификаты и документы И что они подходят для конкретного региона и типа почвы .
Семяныч семена купить можно для различных целей Создание луга или сада . Для каждого типа семян есть свои особенности и требования Например, семена для выращивания овощей должны быть выбраны с учетом климата и типа почвы . Семяныч семена купить можно и для создания луга или сада И можно выбрать семена, которые соответствуют необходимым характеристикам и требованиям . Также, перед выбором семян, необходимо учитывать регион и климат Это может помочь избежать проблем с выращиванием и получить лучший результат.
Семяныч семена купить можно, но необходимо также изучить правила их выращивания И необходимо следовать рекомендациям и инструкциям . Для каждого типа семян есть свои правила и рекомендации Например, семена для выращивания овощей должны быть посажены в хорошо освещенное место . Семяныч семена купить можно и для создания луга или сада И можно выбрать семена, которые соответствуют необходимым характеристикам и требованиям . Также, необходимо следить за здоровьем семян И принимать меры для предотвращения заболеваний и вредителей .
Семяныч семена купить можно в различных магазинах и интернет-магазинах Для начала нужно определиться с типом семян, которые необходимы. Семяныч семена купить можно и в специализированных магазинах Где продавцы могут дать советы и рекомендации по выбору семян . Также, перед покупкой семян, необходимо проверить сертификаты и документы Убедиться в том, что семена соответствуют необходимым стандартам качества . Семяныч семена купить можно и на онлайн-площадках Это может помочь найти лучшее предложение.
Вас интересуют природные богатства России? Давайте исследуем их вместе!
Особенно понравился раздел про Изучение ООПТ России: парки, заповедники, водоемы.
Смотрите сами:
https://alloopt.ru
Надеюсь, вы нашли это путешествие по природе познавательным.
online wetten ohne einzahlung
my site – Wett tipps heute vorhersage
Guzellik ve kozmetik konusunda en guncel ipuclar? ve trendler burada!
Bu arada, eger En Populer Yemek ve Diyet Ipuclar? ile ilgileniyorsan?z, buraya goz at?n.
Kendiniz bak?n:
https://ascieli.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
Сүрөттөр, кыска видеолор жана цитаталар Махачев тууралуу материалдарды окууну кызыктуу кылат.
Кайсы аренада жана кайсы убакта болору боюнча убакыт тилкелери менен ыңгайлуу гид бар. http://www.islam-makhachev-kg.com Колдонуучуларга ыңгайлуу издөөлөр жана тез меню. Бардык бөлүмдөр жаңылык менен толукталып турат. Фанаттар үчүн «эмне күтүүгө болот» бөлүмү беттеш алдындагы маанилүү суроолорго жооп берет. Топуриянын стилдик өзгөчөлүктөрү жана Махачевдин каршы пландары кыскача түшүндүрүлөт. Грепплинг жана клинчтеги көрсөткүчтөр статистикалык булактар менен ырасталат.
Карьерасынын финалдык максаттары жана мүмкүн болгон супер-файт варианттары талданат. Кайсы раунддарда өзгөрүү болушу ыктымал экенин тенденцияларга карап белгилеп беребиз. Фан-арт жана мыйзамдуу колдонула турган медиалар үчүн кеңештер бар. Жаңылыктарга жазылсаңыз, ири анонстар чыккан замат билдирүү аласыз.
на этом сайте https://kra42at.cc
Dogal guzelliginizin s?rlar?n? ortaya c?karmaya var m?s?n?z?
Yeri gelmisken, eger Cilt Bak?m? ve Guzellik: Trendler ve Ipuclar? ile ilgileniyorsan?z, buraya bir bak?n.
Kendiniz bak?n:
https://bakimruhu.com
Cilt bak?m?n?n buyusu ile tan?s?n ve hayat?n?za kazand?r?n.
2023 y?l?na damgas?n? vuran guzellik ve kozmetik trendlerini sizler icin derledik.
“Fonksiyonel ve Estetik Mobilya Cozumleri” konusuyla ilgili olarak oras? tam bir bilgi hazinesi.
Burada okuyabilirsiniz:
https://icmekanturk.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
Добро пожаловать в удивительный мир природы России!
Кстати, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Вот, делюсь ссылкой:
https://alloopt.ru
Надеюсь, вы нашли это путешествие по природе познавательным.
Dogal guzelliginizin s?rlar?n? ortaya c?karmaya var m?s?n?z?
“Modern Mobilya Tasar?mlar? ve Dekorasyon Ipuclar?” konusunda bilgi arayanlar icin oras? tam bir bilgi hazinesi.
Burada okuyabilirsiniz:
https://modernsturk.com
Cildinizin dogall?g?n? ve sagl?g?n? korumak sizin elinizde.
UFCдеги рейтинги, рекорду жана статистикасы бир бетте чогултулуп, издөөнү жеңилдетет.
Телегид сыяктуу жөнөкөй форматта дата, убакыт жана оппоненттер тизилет. ислам махачев бой 2025 Жылдык план жана івент календары менен таанышыңыз. Эң маанилүү анонстар өз алдында чогулган. Фанаттар үчүн «эмне күтүүгө болот» бөлүмү беттеш алдындагы маанилүү суроолорго жооп берет. Эгер ресми анонс чыкса, дата жана локация дароо жаңыланат. Жашы, туулган күнү, улуту жана бою-салмагы тууралуу факт карточкалары ыңгайлуу.
Карьерасынын финалдык максаттары жана мүмкүн болгон супер-файт варианттары талданат. Оппоненттердин акыркы үч беттешиндеги формасын салыштырып, өңүт көрсөтөбүз. Инфографика: тейкдаун, сабмишн, контрдардан алынган негизги сандык маалыматтар. Эгер каталар байкалса, пикир калтырып, оңдоолорго салым кошо аласыз.
пластиковые окна москва цена с установкой недорого становится все более популярной среди домашних и коммерческих застройщиков благодаря своей энергоэффективности и долговечности.
широко используются в строительстве и ремонте домов . Они отличаются своей прочностью и долговечностью. При этом их установка относительно проста и не требует специальных навыков .
Пластиковые окна изготавливаются из высококачественных материалов . Это значительно продлевает срок их службы и снижает затраты на ремонт . Кроме того, имеют высокую устойчивость к погодным условиям.
Одним из основных преимуществ пластиковых окон является их способность уменьшать шум. Это помогает снизить выбросы углекислого газа . Кроме того, создают более мирную атмосферу внутри дома.
Пластиковые окна не подвержены коррозии и гниению. Это делает их идеальным выбором для регионов с суровым климатом . Кроме того, не требуют специальных средств для ухода .
Пластиковые окна имеют разнообразие стильных и современных вариантов. Это позволяет выбрать окна, соответствующие стилю и архитектуре любого здания . При этом они оснащены современными системами открывания и закрывания .
Пластиковые окна могут включать в себя функции регулировки влажности . Это обеспечивает максимальную степень контроля над внутренней средой. Кроме того, они могут быть оснащены специальными стеклами, обеспечивающими дополнительную защиту от ультрафиолетового излучения .
В заключении, пластиковые окна стали неотъемлемой частью современного строительства. Они продолжают эволюционировать и улучшаться . При этом их производство и установка должны соответствовать современным стандартам качества и безопасности .
Пластиковые окна будут развиваться и совершенствоваться . Это потому что они сочетают в себе все необходимые качества и характеристики . Кроме того, будут включать в себя новые технологии и материалы .
Карьерасынын бурулуш учурлары, мыкты раундар жана эмнелер аны чемпион кылганы тууралуу кеңири баяндалат.
Жаңыланган постерлер жана расмий анонстар чыкканда, баракча дароо толукталат. ислам махачев прямой эфир Эфир жолдору жана легалдуу платформалар боюнча кыска нускама бар. Убакыт тилкелери да кошулган. Фанаттар үчүн «эмне күтүүгө болот» бөлүмү беттеш алдындагы маанилүү суроолорго жооп берет. Физикалык көрсөткүчтөр: узундук, «вингспан», кардио жана партер арсеналы боюнча маалымат бар. Беттешке чейинки форма, спарринг жана медициналык текшерүүлөр боюнча расмий шилтемелер бар.
Карьерасынын финалдык максаттары жана мүмкүн болгон супер-файт варианттары талданат. Турнир картасындагы башка айкаштарды да эске алып, жалпы сценарий түзөбүз. Тренинг залынан фрагменттер жана күрөш ыкмалары тууралуу түшүндүрмөлөр кошулат. Жаңыртуулар тарыхы ачык көрсөтүлүп, өзгөртүүлөр датасы менен белгиленет.
Для организации незабываемого праздника илиorporate мероприятия в Новосибирске можно воспользоваться услугой аренда машины с водителем новосибирск, которая позволяет гостям наслаждаться поездкой без забот о вождении.
предоставляет широкий спектр услуг для путешественников . Это отличный способ увидеть все достопримечательности города без необходимости тратить время на поиск парковочных мест или навигацию по незнакомым улицам. Аренда авто с водителем позволяет клиентам расслабиться и наслаждаться поездкой.
Аренда авто с водителем в Новосибирске выполняет роль не только средства передвижения, но и способа познакомиться с городом . Это особенно актуально для деловых поездок, когда время и комфорт имеют первостепенное значение. Аренда авто с водителем обеспечивает высокий уровень сервиса и комфорта во время поездки.
Аренда авто с водителем в Новосибирске дает возможность наслаждаться поездкой без заботы о вождении и парковке . Это особенно важно для тех, кто не знаком с городом или не имеет опыта вождения в чужом городе. Аренда авто с водителем обеспечивает безопасность на дороге .
Аренда авто с водителем в Новосибирске обеспечивает высокий уровень комфорта и сервиса во время поездки. Это может быть особенно важно для групповых поездок или для клиентов, которым необходим определенный уровень комфорта. Аренда авто с водителем позволяет клиентам наслаждаться поездкой без заботы о техническом обслуживании автомобиля.
Аренда авто с водителем в Новосибирске дает возможность выбрать подходящий вариант в зависимости от потребностей и бюджета . Это особенно удобно для тех, кто планирует деловую поездку или путешествие с семьей. Аренда авто с водителем обеспечивает прозрачность и ясность в вопросах оплаты и условий .
Аренда авто с водителем в Новосибирске позволяет клиентам наслаждаться поездкой с максимальным комфортом и минимальными затратами. Это особенно важно для тех, кто часто использует услуги аренды авто с водителем. Аренда авто с водителем обеспечивает высокий уровень сервиса и комфорта во время поездки .
Аренда авто с водителем в Новосибирске дает возможность клиентам наслаждаться поездкой без заботы о вождении . Это особенно важно для тех, кто ценит комфорт и безопасность на дороге. Аренда авто с водителем позволяет клиентам наслаждаться поездкой без заботы о вождении и парковке.
Аренда авто с водителем в Новосибирске предоставляет широкий спектр услуг для путешественников . Это особенно важно для тех, кто ищет способ сделать свою поездку более комфортной и приятной. Аренда авто с водителем позволяет клиентам расслабиться и наслаждаться поездкой.
Для тех, кто планирует деловую поездку или просто хочет исследовать город в комфорте, аренда авто с водителем становится идеальным решением, обеспечивая безопасность, комфорт и гибкость в планировании маршрута.
Услуги аренды авто с водителем в Новосибирске предназначены для обеспечения безопасных и комфортных поездок. Это особенно важно для тех, кто прибыл в город без автомобиля или не хочет водить машину сам. Компании, предлагающие аренду авто с водителем, работают над тем, чтобы клиенты могли наслаждаться поездкой, не беспокоясь о проблемах с парковкой или пробками .
Для тех, кто ищет премиум-услуги, доступны автомобили представительского класса с опытными водителями . Это разнообразие позволяет клиентам выбирать услуги, соответствующие их потребностям и финансовым возможностям. Каждая компания, предоставляющая услуги аренды авто с водителем, имеет свои тарифы и пакеты услуг .
Это особенно важно для туристов, которые не?ы с городом. Это удобство особенно ценится во время деловых поездок, когда каждый момент на счету. Кроме того, наличие водителя позволяет клиентам наслаждаться пейзажем или заниматься делами во время поездки .
Это особенно важно для иностранных гостей или высокопоставленных лиц . Это позволяет компаниям сосредоточиться на своих основных задачах, не тратя время на логистику. Аренда авто с водителем в Новосибирске может быть заказана заранее, чтобы обеспечить отсутствие проблем в день мероприятия .
Уровень обслуживания и качество автомобилей также играют большую роль. Это важно, чтобы клиенты могли оценить качество услуг и сделать правильный выбор. Услуги аренды авто с водителем в Новосибирске должны соответствовать индивидуальным потребностям каждого клиента.
Опыт и квалификация водителей также являются важными факторами. Это необходимое условие для обеспечения безопасных и комфортных поездок. Кроме того, компании должны иметь четкую политику в отношении оплаты и условий аренды, чтобы клиенты могли понимать, что они получают за свои деньги .
Это особенно важно для тех, кто ценит время и комфорт . Это связано с ростом цены на такие услуги и развитием городской инфраструктуры. Аренда авто с водителем в Новосибирске станет еще более доступной и удобной .
Это позволит клиентам получить максимальное удовольствие от поездки и минимизировать заботы о транспорте . Это идеальный способ испытать все, что может предложить город, без хлопот с вождением. Услуги аренды авто с водителем будут ключевым элементом в развитии туризма и бизнеса в регионе.
2023 y?l?na damgas?n? vuran guzellik ve kozmetik trendlerini sizler icin derledik.
“2023 Guzellik ve Kozmetik Trendleri” konusunda bilgi arayanlar icin harika bir makale var.
Iste, linki paylas?yorum:
https://aynakirildi.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
What a material of un-ambiguity and preserveness of valuable knowledge about unexpected feelings.
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Смотрите сами:
https://alloopt.ru
Спасибо за внимание! Надеюсь, вам было интересно.
Түз эфирге чейин негизги фактылар менен тааныштырып, беттештен соң жыйынтык талдоону чыгарабыз.
Тикелей эфир башталганга чейин акыркы коэффициенттер жана линиялар жаңыртылып турат. islam-makhachev-kg com Жөнгө салынган навигация: кийинки беттеш, рейтинг, биография. Жаңылыктар реалдуу убакытта чыгат. Эгер коэффициенттерди издеп жатсаңыз, базардагы негизги линияларды салыштырып көрүңүз. Мүмкүн болгон апсеттер жана беттеш темпи боюнча аналитикалык бөлүм бар. Аудитория үчүн жөнөкөй тилде түшүндүрүлгөн «кантип жеңиши мүмкүн» сценарийлери сунушталат.
Дастин Порье, Чарльз Оливейра, Волкановски сыяктуу чоң аттар менен салыштыруулар бар. Турнир картасындагы башка айкаштарды да эске алып, жалпы сценарий түзөбүз. Медиа пакет издегендер үчүн расмий булактарга жол көрсөтөбүз. Издөө функциясы боюнча ачкыч сөздөрдү киргизип, керектүү бөлүмгө тез өтүңүз.
Cilt bak?m?n?z? bir ust seviyeye c?karman?n zaman? geldi, siz ne dersiniz?
Estetik ve Fonksiyonellik: Ideal Mekan Tasar?m? hakk?ndaki yaz? dikkatimi cekti.
Asag?daki linke bakabilirsiniz:
https://evsahnesi.com
Cilt bak?m?n?n buyusu ile tan?s?n ve hayat?n?za kazand?r?n.
Yeniliklere ac?k ve her daim cekici gorunmek isteyenler icin tuyolar.
“2023 Guzellik ve Kozmetik Trendleri” konusuyla ilgili olarak cok faydal? bilgiler buldum.
Kendiniz bak?n:
https://aynakirildi.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
Cildinizi s?martmak icin haz?r olun!
“Moda ve Konforun Zirvesi: Trendler ve Ipuclar?” konusunda bilgi arayanlar icin cok faydal? bilgiler buldum.
Kendiniz bak?n:
https://sadesik.com
Guzelliginizin ve sagl?g?n?z?n anahtar? dogru cilt bak?m?nda sakl?.
Website – http://shoptema.ru/forum/topic/34385/#post-116838 .
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
Кстати, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, загляните сюда.
Вот, можете почитать:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
https://prbookmarkingwebsites.com/story25764630/mysteries-of-the-sandswept-tombs
Wow, amazing blog layout! How long have you been blogging for? you make blogging look easy. The overall look of your site is wonderful, let alone the content!
2023 y?l?na damgas?n? vuran guzellik ve kozmetik trendlerini sizler icin derledik.
2023 Guzellik ve Kozmetik Trendleri hakk?ndaki yaz? dikkate degerdi.
Burada okuyabilirsiniz:
https://aynakirildi.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
Cilt bak?m?na dair dogal guzellik s?rlar?n? ogrenmeye haz?r m?s?n?z?
Is?lt?l? Guzellik: Sac ve Cilt Bak?m Onerileri hakk?ndaki bolum dikkate degerdi.
Burada okuyabilirsiniz:
https://tenvezarafet.com
Guzelliginizin ve sagl?g?n?z?n anahtar? dogru cilt bak?m?nda sakl?.
Карьерасынын бурулуш учурлары, мыкты раундар жана эмнелер аны чемпион кылганы тууралуу кеңири баяндалат.
Телегид сыяктуу жөнөкөй форматта дата, убакыт жана оппоненттер тизилет. ислам махачев статистика Тейкдаун, контрол жана сабмишн көрсөткүчтөрү визуалдуу берилет. Жөнөкөй тилде түшүндүрмө бар. Бойдогу ыктымал сценарийлер жана алмашуулар тууралуу прогноздор жаңыланып турат. Илия Топурия vs Ислам Махачев айкашы жөнүндө ушак-айың эмес, текшерилген булактар гана берилет. Мурдагы атаандаштарынын стили менен салыштыруу аркылуу контекст берилет.
Түз эфирден кийинки статустар, бонустар жана трофейлер тууралуу фактылар кошулат. Жаракат тууралуу ушак-айыңдан сактануу үчүн текшерилген жаңылыктар гана колдонулат. Медиа пакет издегендер үчүн расмий булактарга жол көрсөтөбүз. Жаңыртуулар тарыхы ачык көрсөтүлүп, өзгөртүүлөр датасы менен белгиленет.
Guzellik s?rlar?n? ve trendlerin ard?ndaki detaylar? kesfetmeye haz?r olun.
Sagl?kl? Yemek Tarifleri ve Pisirme Ipuclar? hakk?ndaki bolum dikkatimi cekti.
Asag?daki linke bakabilirsiniz:
https://sofrasihri.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
bs2web at Ты еще не в курсе, что порождает бурю в темных водах сети? Blacksprut – это не просто символ. Это квинтэссенция анонимности, молниеносной скорости и абсолютной уверенности в каждом действии. Приглашаем на bs2best.at – туда, где шепчут о том, о чем другие предпочитают хранить гробовое молчание. Тебе откроются двери в мир, скрытый от любопытных глаз, доступный лишь избранным, тем, кто понимает истинную цену информации. Ни единой зацепки. Никаких отступлений. Только безупречный Blacksprut, гарант твоей конфиденциальности. Не упусти свой шанс стать первопроходцем – bs2best.at уже готов раскрыть свои тайны. Достаточно ли ты смел, чтобы заглянуть в бездну правды?
Estou completamente alucinado por JabiBet Casino, parece uma correnteza de diversao. Tem uma enxurrada de jogos de cassino irados, com caca-niqueis de cassino modernos e envolventes. O atendimento ao cliente do cassino e uma mare de qualidade, acessivel por chat ou e-mail. Os saques no cassino sao velozes como um redemoinho, mesmo assim mais recompensas no cassino seriam um diferencial brabo. No fim das contas, JabiBet Casino vale demais explorar esse cassino para os cacadores de slots modernos de cassino! De lambuja a navegacao do cassino e facil como surfar, o que deixa cada sessao de cassino ainda mais alucinante.
jabibet apk|
Cilt bak?m?n?z? bir ust seviyeye c?karman?n zaman? geldi, siz ne dersiniz?
“Modern Tesettur Moda Trendleri ve Ipuclar?” konusunda bilgi arayanlar icin cok faydal? bilgiler buldum.
Asag?daki linke bakabilirsiniz:
https://giyimkeyfi.com
Unutmay?n, her cilt tipi guzeldir ve dogru bak?m ile daha da guzellesir.
Adoro o clima insano de PagolBet Casino, parece uma tempestade de diversao. O catalogo de jogos do cassino e uma explosao total, com caca-niqueis de cassino modernos e eletrizantes. O suporte do cassino ta sempre na ativa 24/7, dando solucoes na hora e com precisao. Os pagamentos do cassino sao lisos e blindados, mesmo assim mais giros gratis no cassino seria uma loucura. Na real, PagolBet Casino vale demais explorar esse cassino para quem curte apostar com estilo no cassino! De bonus a navegacao do cassino e facil como uma faisca, faz voce querer voltar pro cassino como um raio.
pagolbet reclame aqui|
read this post here https://meteora.bio
Sou totalmente viciado em BETesporte Casino, sinto um rugido de emocao. A variedade de titulos e impressionante, suportando jogos compativeis com criptomoedas. Fortalece seu saldo inicial. O servico esta disponivel 24/7, acessivel a qualquer momento. O processo e simples e direto, as vezes promocoes mais frequentes seriam um plus. Para finalizar, BETesporte Casino e essencial para apostadores para quem usa cripto para jogar ! Alem disso a interface e fluida e energetica, aumenta o prazer de apostar. Notavel tambem os pagamentos seguros em cripto, fortalece o senso de comunidade.
Descobrir agora mesmo|
аналитика ставок stavka-10.ru .
ставки на спорт прогноз ставки на спорт прогноз .
дешевые телефоны самсунг дешевые телефоны самсунг .
прогнозы на ставки прогнозы на ставки .
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
Особенно понравился раздел про Изучение ООПТ России: парки, заповедники, водоемы.
Вот, делюсь ссылкой:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
Guzellik ve kozmetik konusunda en guncel ipuclar? ve trendler burada!
“Sagl?kl? Beslenme ve Kulturel Lezzetler Kesfi” konusuyla ilgili olarak harika bir makale var.
Burada okuyabilirsiniz:
https://tarifkasif.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
Adoro o clima explosivo de JabiBet Casino, parece uma correnteza de diversao. As opcoes de jogo no cassino sao ricas e eletrizantes, oferecendo sessoes de cassino ao vivo que sao uma explosao. O atendimento ao cliente do cassino e uma mare de qualidade, acessivel por chat ou e-mail. Os saques no cassino sao velozes como um redemoinho, mas queria mais promocoes de cassino que arrasam. No geral, JabiBet Casino oferece uma experiencia de cassino que e puro fluxo para os amantes de cassinos online! De lambuja a navegacao do cassino e facil como surfar, faz voce querer voltar pro cassino como a mare.
jabibet casino|
Ich liebe die unbandige Kraft von Lowen Play Casino, es bietet ein Casino-Abenteuer, das wie ein Urwald leuchtet. Die Casino-Optionen sind vielfaltig und kraftvoll, mit einzigartigen Casino-Slotmaschinen. Die Casino-Mitarbeiter sind schnell wie ein Gepard, ist per Chat oder E-Mail erreichbar. Casino-Gewinne kommen wie ein Blitz, dennoch mehr Casino-Belohnungen waren ein koniglicher Gewinn. Zusammengefasst ist Lowen Play Casino ein Muss fur Casino-Fans fur Spieler, die auf wilde Casino-Kicks stehen! Ubrigens die Casino-Navigation ist kinderleicht wie eine Fahrte, den Spielspa? im Casino in die Hohe treibt.
löwen play alter|
Cilt bak?m?n?z? bir ust seviyeye c?karman?n zaman? geldi, siz ne dersiniz?
Bu arada, eger Modern Mobilya Trendleri ve Dekorasyon Ipuclar? ile ilgileniyorsan?z, buraya bir bak?n.
Iste, linki paylas?yorum:
https://evimtarzi.com
Cilt bak?m?n?n buyusu ile tan?s?n ve hayat?n?za kazand?r?n.
Sou louco pelo role de PagolBet Casino, e um cassino online que detona como um trovao. As opcoes de jogo no cassino sao ricas e vibrantes, com caca-niqueis de cassino modernos e eletrizantes. A equipe do cassino entrega um atendimento que e uma voltagem alta, acessivel por chat ou e-mail. Os pagamentos do cassino sao lisos e blindados, mas mais giros gratis no cassino seria uma loucura. Resumindo, PagolBet Casino vale demais explorar esse cassino para os cacadores de slots modernos de cassino! E mais a plataforma do cassino detona com um visual que e puro trovao, o que deixa cada sessao de cassino ainda mais eletrizante.
pagolbet..com|
**glpro**
glpro is a natural dietary supplement designed to promote balanced blood sugar levels and curb sugar cravings.
Ich habe einen totalen Hang zu SpinBetter Casino, es liefert ein Abenteuer voller Energie. Es gibt eine unglaubliche Auswahl an Spielen, mit immersiven Live-Sessions. Der Support ist 24/7 erreichbar, verfugbar rund um die Uhr. Die Auszahlungen sind ultraschnell, obwohl zusatzliche Freispiele waren ein Highlight. Alles in allem, SpinBetter Casino ist ein Muss fur alle Gamer fur Spieler auf der Suche nach Action ! Au?erdem die Interface ist intuitiv und modern, erleichtert die gesamte Erfahrung. Ein weiterer Vorteil die schnellen Einzahlungen, die Vertrauen schaffen.
spinbettercasino.de|
Ich habe eine Leidenschaft fur NV Casino, es liefert einen einzigartigen Kick. Das Angebot an Spielen ist phanomenal, mit Slots im innovativen Design. Der Kundensupport ist hervorragend, garantiert hochwertige Hilfe. Die Zahlungen sind sicher und flussig, dennoch mehr abwechslungsreiche Boni waren willkommen. Alles in allem, NV Casino ist ein Muss fur Gamer fur Fans von Online-Wetten ! Daruber hinaus die Navigation ist kinderleicht, gibt Lust auf mehr.
playnvcasino.de|
**sugarmute**
sugarmute is a science-guided nutritional supplement created to help maintain balanced blood sugar while supporting steady energy and mental clarity.
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
“2023 Guzellik ve Kozmetik Trendleri” konusuyla ilgili olarak harika bir makale var.
Asag?daki linke bakabilirsiniz:
https://aynakirildi.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
Deneme bonusu veren siteler listemizle dinitme binisi virin sitolar ücretsiz bonus fırsatlarını yakalayın. Yeni üyeler için güncel deneme bonusu burada.
Backlinks for your site
Functional across all subjects of the resource.
I build inbound links to your page.
My backlinks engage Google crawlers to the site, that significantly impacts for positioning, hence it is essential to promote a site free of defects that affect negatively ranking.
Posting poses no risk for your platform!
I don’t submit in contact forms, (contact forms are harmful the domain because of reports from operators).
Publication takes place in approved sources.
Links are added to current continuously refreshed list. There are many sites in the list.
**vitta burn**
vitta burn is a liquid dietary supplement formulated to support healthy weight reduction by increasing metabolic rate, reducing hunger, and promoting fat loss.
Sou totalmente viciado em BETesporte Casino, sinto um rugido de emocao. Ha uma explosao de jogos emocionantes, incluindo apostas esportivas que aceleram o coracao. 100% ate R$600 + apostas gratis. O acompanhamento e impecavel, garantindo atendimento de alto nivel. As transacoes sao confiaveis, contudo ofertas mais generosas dariam um toque especial. Resumindo, BETesporte Casino vale uma aposta certa para entusiastas de jogos modernos ! Alem disso o design e moderno e vibrante, instiga a prolongar o jogo. Um diferencial importante as opcoes variadas de apostas esportivas, fortalece o senso de comunidade.
Ver os detalhes|
Dogal ve etkili cilt bak?m yontemlerine dair tuyolar? kesfedin.
Turk Mutfag?n?n Unutulmaz Lezzet Hikayeleri hakk?ndaki bolum ozellikle hosuma gitti.
Burada okuyabilirsiniz:
https://turksofrasi.com
Cilt bak?m?n? hayat?n?z?n bir parcas? haline getirin ve fark? gorun.
**synaptigen**
synaptigen is a next-generation brain support supplement that blends natural nootropics, adaptogens
Robot Cleaners Uk Tips From The Best In The Business buy robot cleaner (blog.staugustineakoka.org)
**glucore**
glucore is a nutritional supplement that is given to patients daily to assist in maintaining healthy blood sugar and metabolic rates.
Начнем путешествие по магическим уголкам российских заповедников.
Зацепил раздел про Изучение ООПТ России: парки, заповедники, водоемы.
Ссылка ниже:
https://alloopt.ru
Надеюсь, вы нашли это путешествие по природе познавательным.
**nitric boost**
nitric boost is a dietary formula crafted to enhance vitality and promote overall well-being.
**prodentim**
prodentim an advanced probiotic formulation designed to support exceptional oral hygiene while fortifying teeth and gums.
Guzellik s?rlar?n? ve trendlerin ard?ndaki detaylar? kesfetmeye haz?r olun.
“Eviniz Icin Zarif Mobilya ve Dekorasyon Onerileri” konusuyla ilgili olarak harika bir makale var.
Iste, linki paylas?yorum:
https://evimsicak.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
Dogal guzelliginizin s?rlar?n? ortaya c?karmaya var m?s?n?z?
Bu arada, eger Kozmetik Dunyas?nda En Yeni Guzellik Trendleri ve Ipuclar? ile ilgileniyorsan?z, buraya bir bak?n.
Burada okuyabilirsiniz:
https://bakimsehri.com
Sagl?kl? ve dogal bir cilt icin duzenli bak?m sart.
?Calidos saludos a todos los entusiastas de las tragamonedas !
La autenticaciГіn facial facilita el acceso, pero tiene riesgos. Las imГЎgenes pueden ser falsificadas o robadas. casinos sin dni Conviene usarla solo en dispositivos confiables.
Un casino sin dni espaГ±a pone al alcance de todos una amplia selecciГіn de juegos. Desde slots clГЎsicos hasta apuestas deportivas, todo estГЎ disponible. La variedad garantiza diversiГіn sin lГmites.
Juega hoy mismo en un casino sin DNI – п»їhttps://casinossindni.space/
?Les deseo increibles giros !
casino sin dni
В качестве заядлого киномана рекомендую проверенным временем открытием в мире кино – это КИНОГО (https://kinogo-films2.biz/). В его архивах сосредоточено колоссальное число видеоматериалов. Все без исключения свежие релизы 2025 года уже можно найти в каталоге Kinogo, всегда в безупречном качестве и полностью бесплатно. Никакая регистрация не является преградой.
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
Для тех, кто ищет информацию по теме “Изучение ООПТ России: парки, заповедники, водоемы”, нашел много полезного.
Смотрите сами:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
Bu arada, eger Fonksiyon ve Estetik: Mobilya ve Dekorasyon Onerileri ile ilgileniyorsan?z, buraya bir bak?n.
Kendiniz bak?n:
https://dogalyasammobilya.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
**wildgut**
wildgutis a precision-crafted nutritional blend designed to nurture your dog’s digestive tract.
Cilt bak?m?n?z? bir ust seviyeye c?karman?n zaman? geldi, siz ne dersiniz?
“Faydal? Dekorasyon ve Mobilya Ipuclar?” konusunda bilgi arayanlar icin cok faydal? bilgiler buldum.
Asag?daki linke bakabilirsiniz:
https://cilginmobilya.com
Cildinizin dogall?g?n? ve sagl?g?n? korumak sizin elinizde.
https://t.me/pikmaninfo PR & Marketing Expertise: Data-Driven Marketing, Paid Search/SEM (Linkedin Ads, Facebook Ads, Google Ads, YouTube Ads, Yandex Ads, Bing Ads), Search Engine Optimization/SEO, Display, Retargeting, Social Media/SMM, Paid Media, Account Based Marketing/ABM, Digital Marketing/Strategy, Data Analytics, Customer Acquisition, Web Marketing, Business Development, Full Stack Marketing, Customer Journey, Content Marketing, A/B Split Testing, Budget Management, Conversational Marketing, Conversion Rate Optimization, Growth Marketing, Multi-Touch Attribution, Copywriting, Data Journalism, Content writing, Visual Storytelling, Brand Identity, Web Design UX/UI, Digital Media, Content Marketing, Demand Generation, Forecasting and Modeling.
**sleep lean**
sleeplean is a US-trusted, naturally focused nighttime support formula that helps your body burn fat while you rest.
Веб сайт https://urkarl.ru/
2023 y?l?na damgas?n? vuran guzellik ve kozmetik trendlerini sizler icin derledik.
Fonksiyon ve Estetik: Mobilya ve Dekorasyon Onerileri hakk?ndaki bolum dikkate degerdi.
Iste, linki paylas?yorum:
https://dogalyasammobilya.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
купить диплом ветеринара купить диплом ветеринара .
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, там просто кладезь информации.
Вот, можете почитать:
https://alloopt.ru
Спасибо за внимание! Надеюсь, вам было интересно.
Website https://church-bench.ru/ .
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
купить диплом техникума повара 4 разряда купить диплом техникума повара 4 разряда .
Если вы ищете качественные семена различной марки, включая сайт семяныч, то вы можете найти их в специализированных магазинах или интернет-магазинах, предлагающих широкий ассортимент семян для различных культур.
Семяныч семена можно купить в различных магазинах и интернет-магазинах . Это связано с тем, что семена являются основой для выращивания здоровых растений. Семена нужно выбирать с учетом климата и региона, в котором они будут выращиваться . Кроме того, семена должны быть сертифицированы и соответствовать стандартам качества.
Семяныч семена купить можно в различных сортах, включая овощи, фрукты и цветы . Семена должны быть свежими и иметь высокий процент всхожести. Кроме того, семена необходимо проверять на наличие вредителей и заболеваний .
Семяныч семена купить – это важный шаг в выращивании здоровых растений . Семена должны быть свежими и иметь высокий процент всхожести . Кроме того, семена можно купить в пакетах или больших мешках, в зависимости от потребностей .
Семяныч семена купить – это процесс, который требует внимания и ответственности . Семена должны быть свежими и иметь высокий процент всхожести . Кроме того, семена можно купить в пакетах или больших мешках, в зависимости от потребностей .
купить диплом в череповце https://rudik-diplom5.ru/ .
Yeniliklere ac?k ve her daim cekici gorunmek isteyenler icin tuyolar.
Bu arada, eger Modern Modada Stil Ipuclar? ve Trendler ile ilgileniyorsan?z, buraya goz at?n.
Asag?daki linke bakabilirsiniz:
https://modakasifi.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
**mitolyn**
mitolyn a nature-inspired supplement crafted to elevate metabolic activity and support sustainable weight management.
Dogal guzelliginizin s?rlar?n? ortaya c?karmaya var m?s?n?z?
Yeri gelmisken, eger Moda ve Stil Rehberi: En Yeni Trendler ve Kombinler ile ilgileniyorsan?z, buraya goz at?n.
Iste, linki paylas?yorum:
https://modaruhu.com
Cilt bak?m?n? hayat?n?z?n bir parcas? haline getirin ve fark? gorun.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
**yu sleep**
yusleep is a gentle, nano-enhanced nightly blend designed to help you drift off quickly, stay asleep longer, and wake feeling clear.
купить диплом в самаре купить диплом в самаре .
**zencortex**
zencortex contains only the natural ingredients that are effective in supporting incredible hearing naturally.
купить диплом в серове купить диплом в серове .
займы все займы все .
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
Особенно понравился материал про Изучение ООПТ России: парки, заповедники, водоемы.
Вот, делюсь ссылкой:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
**breathe**
breathe is a plant-powered tincture crafted to promote lung performance and enhance your breathing quality.
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
Bu arada, eger Moda ve Stil: Yeni Baslang?c icin Ipuclar? ile ilgileniyorsan?z, buraya goz at?n.
Asag?daki linke bakabilirsiniz:
https://siktarz.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
Кибербезопасность важнее, чем когда-либо kraken darknet kraken onion kraken onion ссылка kraken onion зеркала
Веб сайт https://urkarl.ru/
Dogal guzellik ve cilt bak?m?nda uzmanlar?n s?rlar?na yak?ndan bak?yoruz.
Is?lt?l? Guzellik: Sac ve Cilt Bak?m Onerileri hakk?ndaki bolum dikkate degerdi.
Burada okuyabilirsiniz:
https://tenvezarafet.com
Guzelliginizin ve sagl?g?n?z?n anahtar? dogru cilt bak?m?nda sakl?.
Yeniliklere ac?k ve her daim cekici gorunmek isteyenler icin tuyolar.
“Eviniz Icin Zarif Mobilya ve Dekorasyon Onerileri” konusunda bilgi arayanlar icin oras? tam bir bilgi hazinesi.
Iste, linki paylas?yorum:
https://evimsicak.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
Register at glory casino website and receive bonuses on your first deposit on online casino games and slots right now!
Website https://tione.ru/ .
Dogal ve etkili cilt bak?m yontemlerine dair tuyolar? kesfedin.
Turk Mutfag?n?n Geleneksel ve Modern Lezzetleri hakk?ndaki bolum ozellikle hosuma gitti.
Iste, linki paylas?yorum:
https://turklezzeti.com
Guzelliginizin ve sagl?g?n?z?n anahtar? dogru cilt bak?m?nda sakl?.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
Для организации незабываемого праздника илиorporate мероприятия в Новосибирске можно воспользоваться услугой аренда авто в новосибирске с водителем, которая позволяет гостям наслаждаться поездкой без забот о вождении.
является отличным вариантом для тех, кто хочет с комфортом путешествовать по городу . Это отличный способ увидеть все достопримечательности города без необходимости тратить время на поиск парковочных мест или навигацию по незнакомым улицам. Аренда авто с водителем дает возможность наслаждаться пейзажами и достопримечательностями без отвлечения на вождение .
Аренда авто с водителем в Новосибирске дает возможность клиентам создать незабываемые впечатления от поездки. Это особенно актуально для деловых поездок, когда время и комфорт имеют первостепенное значение. Аренда авто с водителем обеспечивает высокий уровень сервиса и комфорта во время поездки.
Аренда авто с водителем в Новосибирске предоставляет широкий спектр преимуществ для клиентов . Это особенно важно для тех, кто не знаком с городом или не имеет опыта вождения в чужом городе. Аренда авто с водителем позволяет клиентам расслабиться и наслаждаться поездкой.
Аренда авто с водителем в Новосибирске дает возможность выбрать машину, подходящую для конкретных потребностей . Это может быть особенно важно для групповых поездок или для клиентов, которым необходим определенный уровень комфорта. Аренда авто с водителем дает возможность клиентам получить ответы на все вопросы и решить любые проблемы .
Аренда авто с водителем в Новосибирске предлагает различные тарифные планы и условия для клиентов . Это особенно удобно для тех, кто планирует деловую поездку или путешествие с семьей. Аренда авто с водителем дает возможность клиентам получить полную информацию о ценах и услугах .
Аренда авто с водителем в Новосибирске дает возможность клиентам экономить на услугах . Это особенно важно для тех, кто часто использует услуги аренды авто с водителем. Аренда авто с водителем дает возможность клиентам получить максимум удовольствия от поездки .
Аренда авто с водителем в Новосибирске является отличным вариантом для тех, кто хочет с комфортом путешествовать по городу . Это особенно важно для тех, кто ценит комфорт и безопасность на дороге. Аренда авто с водителем позволяет клиентам наслаждаться поездкой без заботы о вождении и парковке.
Аренда авто с водителем в Новосибирске позволяет клиентам наслаждаться поездкой без заботы о вождении. Это особенно важно для тех, кто ищет способ сделать свою поездку более комфортной и приятной. Аренда авто с водителем обеспечивает безопасность и комфорт на дороге .
Для тех, кто нуждается в высококачественных услугах перевода, компания бюро переводов апостиль предлагает широкий спектр переводческих услуг, включая перевод документов, технический перевод и многое другое.
Бюро переводов – это организация, которая профессионально занимается переводом текстов и документов для удовлетворения клиентов. Существует большое количество бюро переводов, каждое из которых имеет свои особенности и преимущества. Некоторые бюро переводов специализируются на переводе технических текстов, другие занимаются переводом литературных произведений. Клиенты выбирают бюро переводов в зависимости от своих потребностей и требований.
Бюро переводов также оказывает услуги по редактированию , чтобы гарантировать высочайшее качество конечного продукта.
Бюро переводов может переводить даже устную речь, например, на конференциях и мероприятиях.
Бюро переводов помогает клиентам эффективно общаться с иностранными партнерами и клиентами.
Бюро переводов предоставляет широкий спектр услуг, включая перевод документов, веб-сайтов и устную речь.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
Guzellik ve kozmetik konusunda en guncel ipuclar? ve trendler burada!
Yeri gelmisken, eger Renkli Mutfak Tarifleri ve Beslenme Ipuclar? ile ilgileniyorsan?z, buraya goz at?n.
Kendiniz bak?n:
https://evtarifim.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
additional info https://meteora.green
check https://easycook-hub.com/
Cilt bak?m?n?z? bir ust seviyeye c?karman?n zaman? geldi, siz ne dersiniz?
“Dogal Guzellik Yontemleri: Cilt ve Sac Bak?m? Ipuclar?” konusuyla ilgili olarak cok faydal? bilgiler buldum.
Kendiniz bak?n:
https://ipekcilt.com
Guzelliginizin ve sagl?g?n?z?n anahtar? dogru cilt bak?m?nda sakl?.
social chat
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
Bu arada, eger Ev Dekorasyonunda Modern Ipuclar? ve Trendler ile ilgileniyorsan?z, buraya bir bak?n.
Kendiniz bak?n:
https://evimturk.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
Visit Your URL https://zorthelium.com
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
Зацепил материал про Изучение ООПТ России: парки, заповедники, водоемы.
Смотрите сами:
https://alloopt.ru
Вот такое у нас получилось погружение в мир природы.
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
useful source https://freyvalis.com/
Estou alucinado com BRCasino, oferece uma aventura de cassino que pulsa como um pandeiro. Tem uma enxurrada de jogos de cassino irados, com slots de cassino tematicos de festa. O atendimento ao cliente do cassino e uma bateria de responsa, com uma ajuda que brilha como serpentinas. Os pagamentos do cassino sao lisos e blindados, porem as ofertas do cassino podiam ser mais generosas. Em resumo, BRCasino oferece uma experiencia de cassino que e puro batuque para os amantes de cassinos online! De bonus o design do cassino e um desfile visual vibrante, adiciona um toque de folia ao cassino.
br77 orlando|
Estou completamente alucinado por JabiBet Casino, tem uma vibe de jogo que e puro tsunami. Tem uma enxurrada de jogos de cassino irados, incluindo jogos de mesa de cassino cheios de vibe. O atendimento ao cliente do cassino e uma mare de qualidade, garantindo suporte de cassino direto e sem tempestade. Os saques no cassino sao velozes como um redemoinho, as vezes mais recompensas no cassino seriam um diferencial brabo. No fim das contas, JabiBet Casino vale demais explorar esse cassino para os aventureiros do cassino! E mais o site do cassino e uma obra-prima de estilo, o que deixa cada sessao de cassino ainda mais alucinante.
jabibet casino bonus code|
Sou viciado em PlayPIX Casino, e uma plataforma que pulsa com energia festiva. A selecao de jogos e fenomenal, com slots de design inovador. 100% ate €500 + 200 rodadas gratis. Os agentes respondem com rapidez, oferecendo respostas claras. O processo e simples e elegante, embora recompensas adicionais seriam festivas. Em resumo, PlayPIX Casino vale uma visita epica para fas de cassino online ! Alem disso a navegacao e simples e envolvente, instiga a prolongar a experiencia. Um diferencial importante os torneios regulares para competicao, fortalece o senso de comunidade.
Ver agora|
additional hints https://melvyridge.com
Clicking Here https://gameartsketch.com
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
Bu arada, eger Fonksiyonel ve Estetik Mobilya Cozumleri ile ilgileniyorsan?z, buraya bir bak?n.
Burada okuyabilirsiniz:
https://icmekanturk.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
https://plisio.net/ko/blog/missav
проект перепланировки цена проект перепланировки цена .
услуги по согласованию перепланировки http://www.soglasovanie-pereplanirovki-kvartiry3.ru .
проектирование перепланировки в квартире http://www.proekt-pereplanirovki-kvartiry11.ru .
услуги по согласованию перепланировки квартиры soglasovanie-pereplanirovki-kvartiry4.ru .
Get the facts https://homeharvestpro.com/
bs market Неужели ты до сих пор не знаешь, что переворачивает мир даркнета? Blacksprut – это не просто название. Это новая эра анонимности, мгновенной скорости и железобетонной безопасности в сети. Загляни на bs2best.at – туда, где обсуждают то, о чём остальные предпочитают молчать в тряпочку. Тебе откроется доступ к информации, тщательно оберегаемой от посторонних глаз. Только для тех, кто понимает правила игры. Никаких следов, никаких компромиссов, только абсолютная конфиденциальность – это Blacksprut. Не упусти свой шанс стать первооткрывателем – bs2best.at уже распахнул свои двери для тебя. Хватит ли у тебя смелости взглянуть правде прямо в лицо?
he said https://lorivawind.com/
Acho simplesmente fenomenal BRCasino, tem uma vibe de jogo tao vibrante quanto uma escola de samba na avenida. O catalogo de jogos do cassino e uma folia de emocoes, com jogos de cassino perfeitos pra criptomoedas. O servico do cassino e confiavel e cheio de swing, dando solucoes na hora e com precisao. O processo do cassino e limpo e sem tropecos, mas as ofertas do cassino podiam ser mais generosas. Em resumo, BRCasino vale demais sambar nesse cassino para quem curte apostar com gingado no cassino! De bonus o design do cassino e um desfile visual vibrante, eleva a imersao no cassino ao ritmo de um tamborim.
br77 steakhouse – kissimmee|
click here for info https://actingproacademy.com/
Вас интересуют природные богатства России? Давайте исследуем их вместе!
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Ссылка ниже:
https://alloopt.ru
Рад был поделиться с вами этой информацией. До новых встреч!
Galera, vim dividir minhas impressoes no 4PlayBet Casino porque superou minhas expectativas. A variedade de jogos e de cair o queixo: blackjack envolvente, todos com graficos de primeira. O suporte foi amigavel, responderam em minutos pelo chat, algo que raramente vi. Fiz saque em cartao e o dinheiro entrou na mesma hora, ponto fortissimo. Se tivesse que criticar, diria que seria legal torneios de slots, mas isso nao estraga a experiencia. Enfim, o 4PlayBet Casino e parada obrigatoria pra quem gosta de cassino. Com certeza vou continuar jogando.
4play bet Г© confiГЎvel|
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
Pratik ve Lezzetli Tariflerle Mutfak Keyfi hakk?ndaki yaz? dikkatimi cekti.
Burada okuyabilirsiniz:
https://sevgiylepisir.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
Sou viciado em PlayPIX Casino, oferece um prazer carnavalesco. O catalogo e rico e diversificado, com sessoes ao vivo dinamicas. Com um bonus extra para comecar. O servico esta disponivel 24/7, sempre pronto para ajudar. As transacoes sao confiaveis, as vezes mais promocoes regulares seriam otimas. Em sintese, PlayPIX Casino oferece uma experiencia inesquecivel para entusiastas de jogos modernos ! Vale notar a interface e fluida e elegante, aumenta o prazer de jogar. Um diferencial importante os torneios regulares para competicao, oferece recompensas continuas.
Descobrir agora mesmo|
try this website https://jachtmarine.com/
Лучший выбор для любителей кино – это КИНОГО (https://kinogo-films1.biz/). На портале доступна огромная база кино и сериалов, которые можно смотреть онлайн без смс в хорошем качестве 1080p и что важно – без регистрации. На Kinogo вас ждут все свежие релизы 2025 года, а также золотая классика кинематографа. Это – один из самых популярных онлайн-кинотеатров в своем роде.
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
“2023 Guzellik ve Kozmetik Trendleri” konusunda bilgi arayanlar icin cok faydal? bilgiler buldum.
Asag?daki linke bakabilirsiniz:
https://aynakirildi.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
look at here now https://alvorotime.com/
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, нашел много полезного.
Смотрите сами:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
check out the post right here https://veranoleaf.com
**prostadine**
prostadine is a next-generation prostate support formula designed to help maintain, restore, and enhance optimal male prostate performance.
**pinealxt**
pinealxt is a revolutionary supplement that promotes proper pineal gland function and energy levels to support healthy body function.
**energeia**
energeia is the first and only recipe that targets the root cause of stubborn belly fat and Deadly visceral fat.
**prostabliss**
prostabliss is a carefully developed dietary formula aimed at nurturing prostate vitality and improving urinary comfort.
more https://thedeuengruol.com
click here to find out more https://townhaushome.com
go to my blog https://parkerturnersart.com/
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Смотрите сами:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
pop over to these guys https://frankieandsailor/
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
Bu arada, eger Mutfakta Yenilikci Deneyimler ve Lezzetli Yolculuklar ile ilgileniyorsan?z, buraya goz at?n.
Iste, linki paylas?yorum:
https://mutfakkeyfi.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
**boostaro**
boostaro is a specially crafted dietary supplement for men who want to elevate their overall health and vitality.
discover this info here https://tozendoor.com
see this site https://swingstepbasics.com/
Неймар в «Барселоне» и ПСЖ: где был пик дриблинга и ассистов, по цифрам и визуальному анализу? Неймар сейчас: форма, статус, тренировки — короткий апдейт помогает выбрать обои и тему. Собираю «неймар барселона фото» и ранние кадры из «Сантоса» в одном плейлисте. http://neymar-kg.com. Сантос Неймар: финты против плотной обороны — полезно разобрать для молодых вингеров.
«Неймар золотой мяч» — почему не выиграл? Интересны аналитические статьи без фанатизма. Неймар номер: на футболке в «Сантосе» и «Барселоне» — важные детали для коллекционеров. Неймар жуниор — хочу подборку детских фото для сравнительного коллажа. Где играет Неймар 2025 — обновляю карточки игрока в своём блоге.
Неймар фото ПСЖ — лучше матч-день, где эмоции максимально живые. Неймар новости — лучше краткие дайджесты, чем длинные простыни текста.
visit this site https://shiomagazine.com/
**potentstream**
potentstream is engineered to promote prostate well-being by counteracting the residue that can build up from hard-water minerals within the urinary tract.
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
Yeri gelmisken, eger Fonksiyonel ve Estetik Mobilya Cozumleri ile ilgileniyorsan?z, buraya bir bak?n.
Burada okuyabilirsiniz:
https://icmekanturk.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
helpful resources https://meteora.gives/
visit our website https://fashionshootlab.com/
15 Best Robot Vacuum Cleaners Bloggers You Need To Follow best Robot vacuum Cleaners
Добро пожаловать в удивительный мир природы России!
Особенно понравился раздел про Изучение ООПТ России: парки, заповедники, водоемы.
Смотрите сами:
https://alloopt.ru
Спасибо за внимание! Надеюсь, вам было интересно.
Если вы ищете высококачественные семена для своего сада или коллекции, то семяныч магазин предлагает широкий ассортимент семян от известных брендов и селекционеров, включая сорта, подходящие для разных климатических зон и типов почвы.
Это очень просто найти нужные семена в интернете и купить их с доставкой на дом . Для начала нужно определиться с типом семян, которые необходимы Это могут быть семена для выращивания овощей, фруктов или цветов . Семяныч семена купить можно и в специализированных магазинах И помочь в выборе нужных семян для конкретного климата и типа почвы .
Семяныч семена купить можно и на онлайн-площадках И можно сравнить цены и характеристики семян от разных продавцов . Семена можно купить и на рынках Где можно встретить продавцов, которые сами выращивают семена . Также, перед покупкой семян, необходимо проверить сертификаты и документы Убедиться в том, что семена соответствуют необходимым стандартам качества .
Семяныч семена купить можно для различных целей И даже для создания специальных посадок, таких как медоносные растения. Для каждого типа семян есть свои особенности и требования Например, семена для выращивания овощей должны быть выбраны с учетом климата и типа почвы . Семяныч семена купить можно и для создания луга или сада Что может быть хорошим вариантом для тех, кто хочет создать красивое и функциональное пространство . Также, перед выбором семян, необходимо учитывать регион и климат И необходимо выбрать семена, которые подходят для этого региона и климата .
Семяныч семена купить можно, но необходимо также изучить правила их выращивания Чтобы получить лучший результат и избежать проблем . Для каждого типа семян есть свои правила и рекомендации И должны быть политы регулярно и в необходимом количестве . Семяныч семена купить можно и для создания луга или сада Это может быть хорошим вариантом для тех, кто ценит красоту и функциональность. Также, необходимо следить за здоровьем семян И использовать необходимые средства и методы для поддержания здоровья семян .
Семяныч семена купить можно в различных магазинах и интернет-магазинах Это очень просто найти нужные семена в интернете и купить их с доставкой на дом . Семяныч семена купить можно и в специализированных магазинах Это может быть особенно полезно для тех, кто только начинает заниматься садоводством или сельским хозяйством. Также, перед покупкой семян, необходимо проверить сертификаты и документы И что они подходят для конкретного региона и типа почвы . Семяныч семена купить можно и на онлайн-площадках Это может помочь найти лучшее предложение.
Хочу аву с «неймар сантос фото»: важно, чтобы кадры были чёткие и подойдут для профилей. Хочу «неймар фото на аву» без шумов и с ровным цветом кожи, пригодные для соцсетей. Для мобил фанатов mobil futbol важна чистая сводка по матчам и травмам. неймар статистика. Ищу «неймар красивые фото 2024» в стиле editorial — подскажите, какие фотосеты топ.
Неймар текущие команды: удобно видеть клуб/сборная/статус в одном блоке. Неймар барса — обои с Камп Ноу и ночной подсветкой стадиона смотрятся мощно. Неймар в детстве: редкие фото из академии «Сантоса» — подскажите архивы. Неймар Барселона обои — хочется классики без кричащих фильтров и водяных знаков.
Неймар какой клуб сейчас — нужен снэпшот для карточек игроков. Неймар лучшие фото — интересны кадры из туннеля и разминки, редко попадаются.
Read More Here https://kaloramind.com
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
Guzellik s?rlar?n? ve trendlerin ard?ndaki detaylar? kesfetmeye haz?r olun.
Guzellik Ipuclar? ve Urun Incelemeleri hakk?ndaki yaz? ozellikle hosuma gitti.
Asag?daki linke bakabilirsiniz:
https://parlakten.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
discover this https://elvirotree.com
Кто знает, сколько голов забил Неймар за карьеру? Хочу таблицу по клубам и сборной. Нужна подборка «месси роналду неймар фото» для заставки — редкие кадры и матчевые эмоции приветствуются. Подборка редких кадров и тактики по сезонам 2011–2012 поможет фанатам oyunlar. https://neymar-kg.com. Неймар фильмы и документалки: посоветуйте топ-3 для выходных.
Ищу «неймар сантос 2011» в хорошем качестве — особенно финалы и кубковые игры. Сравниваю «неймар 2012 сантос» и переход в Европу — интересна динамика решений в финале. Неймар жена, дети — только официальные факты, без слухов; подскажите корректные био-источники. Месси Роналду Неймар Мбаппе — хочу динамичный коллаж для заставки.
Где найти «неймар сантос фото» в HQ, не из соцсетей с пережатием? Неймар обои на телефон — тёмные темы помогают экономить батарею на OLED.
online broadcast
pop over to this website https://natuberjuice.com/
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
2023 Guzellik ve Kozmetik Trendleri hakk?ndaki yaz? dikkatimi cekti.
Iste, linki paylas?yorum:
https://aynakirildi.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
over here https://costruzionibiba.com/
Неймар в «Барселоне» и ПСЖ: где был пик дриблинга и ассистов, по цифрам и визуальному анализу? Ищу «неймар обои барселона» и «бразилия»: хочется минимализма, без лишних логотипов. Для мобил фанатов mobil futbol важна чистая сводка по матчам и травмам. неймар статистика. Неймар прическа: подборка по годам для фан-арта и коллажей, особенно ранние варианты.
Неймар Бразилия: обои в национальной форме, стадионный свет и динамика движения. Где играет Неймар сейчас — обновляю подписи к постам, чтобы не ошибаться. Когда «умер неймар» — кликбейт заголовки; нужны разборы, опровергающие фейки. Неймар барса — лучшие фото с трофеями и парадами, для коллекции.
Неймар какая зарплата в «Аль-Хиляль» — интересует структура фикс+бонусы. Где сейчас играет Неймар — закреплю ссылку в профиле, чтобы не терять.
Откройте для себя прекрасные и загадочные места, которые находятся под охраной в нашей стране.
Между прочим, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Вот, делюсь ссылкой:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
Adoro o glitch de PlayPix Casino, e um cassino online que reluz como um pixel em overclock. A selecao de titulos e um buffer de prazeres. com jogos adaptados para criptomoedas. O atendimento esta sempre ativo 24/7. com solucoes precisas e instantaneas. O processo e claro e sem crashes. em alguns momentos queria mais promocoes que glitcham como retro. Resumindo, PlayPix Casino e um cassino online que e uma matriz de diversao para os exploradores de jogos online! Como extra o site e uma obra-prima de estilo digital. tornando cada sessao ainda mais pixelada.
playpix com br|
Sou viciado no fluxo de Brazino Casino, oferece uma aventura que flui como uma onda cristalina. As escolhas sao vibrantes como um atol. oferecendo lives que explodem como um geiser. O atendimento esta sempre ativo 24/7. com solucoes precisas e instantaneas. Os saques sao velozes como um mergulho. ocasionalmente mais giros gratis seriam subaquaticos. Em sintese, Brazino Casino e o point perfeito pros fas de cassino para os exploradores de jogos online! De lambuja a navegacao e facil como uma corrente marinha. transformando cada aposta em uma aventura marinha.
brazino777 slot machine|
Ich bin suchtig nach JackpotPiraten Casino, es hat eine Spielstimmung, die alles sprengt. Die Spielauswahl im Casino ist riesig wie ein Ozean, inklusive eleganter Casino-Tischspiele. Der Casino-Kundenservice ist ein echter Schatz, sorgt fur sofortigen Casino-Support, der beeindruckt. Auszahlungen im Casino sind schnell wie ein Sturm, aber mehr Casino-Belohnungen waren ein echter Schatz. Am Ende ist JackpotPiraten Casino ein Casino mit einem Spielspa?, der die Planken erzittern lasst fur Fans von Online-Casinos! Und au?erdem die Casino-Seite ist ein grafisches Meisterwerk, Lust macht, immer wieder ins Casino zuruckzukehren.
jackpotpiraten login|
Estou pirando com SambaSlots Casino, da um ritmo de cassino que e puro axe. A gama do cassino e um verdadeiro carnaval de delicias, com jogos de cassino perfeitos pra criptomoedas. Os agentes do cassino sao rapidos como um passista, com uma ajuda que e puro axe. O processo do cassino e limpo e sem tropecos, mas as ofertas do cassino podiam ser mais generosas. No geral, SambaSlots Casino oferece uma experiencia de cassino que e puro batuque para os viciados em emocoes de cassino! E mais a navegacao do cassino e facil como um passo de carnaval, eleva a imersao no cassino ao ritmo do pandeiro.
vip la sambaslots casino|
J’apprecie enormement 7BitCasino, c’est une veritable energie de jeu irresistible. Le catalogue est incroyablement vaste, avec des machines a sous modernes et captivantes. Le service d’assistance est de premier ordre, offrant des reponses rapides et precises. Les transactions en cryptomonnaies sont instantanees, bien que j’aimerais plus d’offres promotionnelles, afin de maximiser l’experience. En resume, 7BitCasino vaut pleinement le detour pour les adeptes de sensations fortes ! Par ailleurs l’interface est fluide et retro, renforce l’immersion totale.
7bitcasino|
music stream
special info https://rynovaworks.com/
Yeniliklere ac?k ve her daim cekici gorunmek isteyenler icin tuyolar.
“Sagl?kl? Beslenme ve Kulturel Lezzetler Kesfi” konusunda bilgi arayanlar icin cok faydal? bilgiler buldum.
Iste, linki paylas?yorum:
https://tarifkasif.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
Tenho uma paixao ardente por PlayPIX Casino, oferece um prazer eletrizante. A variedade de titulos e estonteante, incluindo apostas esportivas que aceleram o coracao. 100% ate €500 + rodadas gratis. O suporte ao cliente e excepcional, acessivel a qualquer momento. Os saques sao rapidos como um raio, embora mais rodadas gratis seriam um diferencial. No geral, PlayPIX Casino garante diversao constante para quem aposta com cripto ! Vale destacar o site e rapido e cativante, aumenta o prazer de jogar. Igualmente impressionante os eventos comunitarios envolventes, assegura transacoes confiaveis.
Explorar agora|
Sou totalmente viciado em BETesporte Casino, sinto um rugido de emocao. O catalogo e vibrante e diversificado, suportando jogos compativeis com criptomoedas. O bonus de boas-vindas e empolgante. A assistencia e eficiente e amigavel, oferecendo respostas claras. Os pagamentos sao seguros e fluidos, embora recompensas extras seriam um hat-trick. No fim, BETesporte Casino e essencial para apostadores para entusiastas de jogos modernos ! Alem disso a navegacao e intuitiva e rapida, adiciona um toque de estrategia. Igualmente impressionante os torneios regulares para rivalidade, oferece recompensas continuas.
Descobrir|
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
Кстати, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, загляните сюда.
Ссылка ниже:
https://alloopt.ru
Что думаете о красоте природы России? Делитесь мнениями!
Guzellik s?rlar?n? ve trendlerin ard?ndaki detaylar? kesfetmeye haz?r olun.
“Guzellik ve Kozmetik: Ipuclar? ve Trendler” konusuyla ilgili olarak oras? tam bir bilgi hazinesi.
Kendiniz bak?n:
https://guzellikturk.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
Sou viciado no fluxo de Brazino Casino, pulsa com uma forca de cassino digna de um oceano. A selecao de titulos e uma correnteza de emocoes. com caca-niqueis modernos que nadam como peixes tropicais. O servico e confiavel como uma ancora. com ajuda que ilumina como uma perola. Os pagamentos sao lisos como um coral. mas mais giros gratis seriam subaquaticos. Em resumo, Brazino Casino e uma onda de adrenalina para os exploradores de jogos online! Vale dizer o visual e uma explosao de corais. transformando cada aposta em uma aventura marinha.
brazino777 registro|
Ich bin suchtig nach JackpotPiraten Casino, es ist ein Online-Casino, das wie eine Welle kracht. Es gibt eine Flut an packenden Casino-Titeln, inklusive eleganter Casino-Tischspiele. Die Casino-Mitarbeiter sind schnell wie ein Piratenschiff, ist per Chat oder E-Mail erreichbar. Der Casino-Prozess ist klar und ohne Wellengang, dennoch wurde ich mir mehr Casino-Promos wunschen, die funkeln. Insgesamt ist JackpotPiraten Casino ein Casino mit einem Spielspa?, der die Planken erzittern lasst fur Abenteurer im Casino! Nebenbei die Casino-Oberflache ist flussig und glanzt wie ein Piratenschiff, Lust macht, immer wieder ins Casino zuruckzukehren.
jackpotpiraten 50 free spins|
Веб сайт https://urkarl.ru/
J’apprecie enormement 7BitCasino, ca ressemble a une sensation de casino unique. Les options de jeu sont riches et diversifiees, offrant des sessions de casino en direct immersives. Le support est ultra-reactif et professionnel, repondant en un clin d’?il. Le processus de retrait est simple et fiable, neanmoins les promotions pourraient etre plus genereuses, notamment des bonus sans depot. En fin de compte, 7BitCasino est une plateforme d’exception pour les amateurs de casino en ligne ! Ajoutons que le site est concu avec style et modernite, facilite chaque session de jeu.
avis 7bitcasino|
Слив курсов ЕГЭ география https://courses-ege.ru
https://clocks-top.com/
Sou viciado em PlayPIX Casino, e uma plataforma que vibra com intensidade. A selecao de jogos e fenomenal, oferecendo jogos de mesa envolventes. O bonus de boas-vindas e empolgante. O suporte ao cliente e excepcional, garantindo atendimento de alto nivel. O processo e simples e elegante, contudo promocoes mais frequentes dariam um toque extra. No geral, PlayPIX Casino e essencial para jogadores para amantes de emocoes fortes ! Adicionalmente a interface e fluida e estilosa, adiciona um toque de conforto. Notavel tambem o programa VIP com niveis exclusivos, oferece recompensas continuas.
Continuar lendo|
Estou completamente apaixonado por BETesporte Casino, e uma plataforma que vibra como um estadio lotado. O catalogo e vibrante e diversificado, com slots modernos e tematicos. O bonus de boas-vindas e empolgante. O acompanhamento e impecavel, oferecendo respostas claras. Os saques sao rapidos como um contra-ataque, no entanto mais apostas gratis seriam incriveis. Para finalizar, BETesporte Casino e uma plataforma que domina o campo para quem usa cripto para jogar ! Acrescentando que a plataforma e visualmente impactante, tornando cada sessao mais competitiva. Notavel tambem as opcoes variadas de apostas esportivas, fortalece o senso de comunidade.
Ler mais|
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
Yeri gelmisken, eger Mutfakta Yenilikci Deneyimler ve Lezzetli Yolculuklar ile ilgileniyorsan?z, buraya bir bak?n.
Burada okuyabilirsiniz:
https://mutfakkeyfi.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
Хочу аву с «неймар сантос фото»: важно, чтобы кадры были чёткие и подойдут для профилей. Кто посоветует качественные «неймар игры» с нарезками дриблинга без музыки и водяных знаков? Подборка редких кадров и тактики по сезонам 2011–2012 поможет фанатам oyunlar. https://neymar-kg.com. Где найти «неймар фото ПСЖ» в матч-дне и тренировках, чтобы собрать серию аватарок?
Нужны «неймар обои на телефон» с мягким контрастом, чтобы иконки читались. Неймар религия: редкая тема, важно корректно и без спекуляций — есть проверенные источники? Неймар жуниор — хочу подборку детских фото для сравнительного коллажа. Где играет Неймар 2025 — обновляю карточки игрока в своём блоге.
Неймар обой — встречал такое написание: ищу корректные теги для поиска. Где сейчас играет Неймар — закреплю ссылку в профиле, чтобы не терять.
Откройте для себя прекрасные и загадочные места, которые находятся под охраной в нашей стране.
Для тех, кто ищет информацию по теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Вот, делюсь ссылкой:
https://alloopt.ru
Вот такое у нас получилось погружение в мир природы.
другие vodkabet
каталог vodka bet
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
Bu arada, eger Zarafetin Is?g?: Moda ve Kulturun Bulusmas? ile ilgileniyorsan?z, buraya goz at?n.
Asag?daki linke bakabilirsiniz:
https://stilvezarafet.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
Современные технологии экономят силы kraken рабочая ссылка onion kraken маркетплейс зеркало кракен ссылка кракен даркнет
прогнозы на футбол сегодня прогнозы на футбол сегодня .
Веб сайт https://urkarl.ru/
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, нашел много полезного.
Смотрите сами:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
Guzellik s?rlar?n? ve trendlerin ard?ndaki detaylar? kesfetmeye haz?r olun.
En Son Moda Trendleri: S?kl?k ve Konfor hakk?ndaki bolum ozellikle hosuma gitti.
Burada okuyabilirsiniz:
https://turktekstil.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
stage chat
I’ve been using best mushroom gummies daily in regard to on the other side of a month at the moment, and I’m justifiably impressed during the uncontested effects. They’ve helped me judge calmer, more balanced, and less tense from the beginning to the end of the day. My sleep is deeper, I wake up refreshed, and straight my pinpoint has improved. The trait is excellent, and I worth the common ingredients. I’ll positively carry on buying and recommending them to the whole world I know!
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
En Son Moda Trendleri: S?kl?k ve Konfor hakk?ndaki yaz? dikkatimi cekti.
Kendiniz bak?n:
https://turktekstil.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
Начнем путешествие по магическим уголкам российских заповедников.
Для тех, кто ищет информацию по теме “Изучение ООПТ России: парки, заповедники, водоемы”, нашел много полезного.
Вот, делюсь ссылкой:
https://alloopt.ru
Что думаете о красоте природы России? Делитесь мнениями!
**hepato burn**
hepato burn is a premium nutritional formula designed to enhance liver function, boost metabolism, and support natural fat breakdown.
?Salud por cada buscador de emociones !
En casinos online internacionales puedes jugar sin restricciones y con atenciГіn al cliente en espaГ±ol. casinos extranjeros El catГЎlogo de casinos online internacionales incluye tragamonedas, ruletas y juegos en vivo. Acceder a casinos online internacionales es sencillo, rГЎpido y sin procesos complicados.
El catГЎlogo de casinos internacionales incluye tragamonedas, ruletas y juegos en vivo. Los usuarios disfrutan de RTP altos y mГ©todos de pago flexibles en casinos internacionales. Acceder a casinos internacionales es sencillo, rГЎpido y sin procesos complicados.
CГіmo ganar mГЎs jugando en casinos fuera de EspaГ±a – п»їhttps://casinosinternacionalesonline.space/
Que tengas la fortuna de disfrutar que la suerte te traiga emocionantes rondas !
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
Продолжение водка бет казино
Guzellik s?rlar?n? ve trendlerin ard?ndaki detaylar? kesfetmeye haz?r olun.
Pratik ve Lezzetli Tariflerle Mutfak Keyfi hakk?ndaki bolum dikkate degerdi.
Kendiniz bak?n:
https://sevgiylepisir.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
**hepato burn**
hepato burn is a potent, plant-based formula created to promote optimal liver performance and naturally stimulate fat-burning mechanisms.
выберите ресурсы водка казино
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
“2023 Guzellik ve Kozmetik Trendleri” konusuyla ilgili olarak cok faydal? bilgiler buldum.
Asag?daki linke bakabilirsiniz:
https://aynakirildi.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
Откройте для себя прекрасные и загадочные места, которые находятся под охраной в нашей стране.
Кстати, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, загляните сюда.
Смотрите сами:
https://alloopt.ru
Надеюсь, вы нашли это путешествие по природе познавательным.
wie funktioniert kombiwette
My blog :: badminton live wetten
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
info foot africain telecharger 1xbet cameroun
Ich bin suchtig nach PlayJango Casino, es bietet ein Casino-Abenteuer, das wie ein Regenbogen funkelt. Es gibt eine Woge an packenden Casino-Titeln, mit modernen Casino-Slots, die einen in ihren Bann ziehen. Das Casino-Team bietet Unterstutzung, die wie ein Stern glanzt, ist per Chat oder E-Mail erreichbar. Der Casino-Prozess ist klar und ohne Turbulenzen, ab und zu wurde ich mir mehr Casino-Promos wunschen, die wie ein Vulkan ausbrechen. Am Ende ist PlayJango Casino ein Muss fur Casino-Fans fur Abenteurer im Casino! Zusatzlich die Casino-Navigation ist kinderleicht wie ein Windhauch, das Casino-Erlebnis total elektrisiert.
playjango free bonus codes|
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
Bu arada, eger Fonksiyonel ve Estetik Mobilya Cozumleri ile ilgileniyorsan?z, buraya goz at?n.
Burada okuyabilirsiniz:
https://icmekanturk.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
Acho simplesmente intergalactico SpeiCasino, da uma energia de cassino que e pura luz cosmica. A gama do cassino e simplesmente um universo de delicias, com slots de cassino tematicos de espaco. O atendimento ao cliente do cassino e uma estrela-guia, dando solucoes na hora e com precisao. O processo do cassino e limpo e sem turbulencia cosmica, porem queria mais promocoes de cassino que explodem como estrelas. No geral, SpeiCasino garante uma diversao de cassino que e uma galaxia para os amantes de cassinos online! Alem disso o design do cassino e um espetaculo visual intergalactico, eleva a imersao no cassino a um nivel cosmico.
promo spei|
Curto demais a vibracao de JonBet Casino, parece uma camara de ecos cheia de adrenalina. Tem uma enxurrada de jogos de cassino irados. incluindo jogos de mesa com um toque harmonico. O suporte e um reverb preciso. respondendo rapido como um eco na caverna. Os pagamentos sao seguros e fluidos. mesmo assim mais giros gratis seriam vibrantes. Na real, JonBet Casino e uma vibracao de adrenalina para quem curte apostar com estilo harmonico! De bonus a navegacao e facil como um eco. adicionando um toque de eco ao cassino.
jonbet aposta|
Читать далее
casino vodka
Website https://ipodtouch3g.ru/ .
веб-сайт
arkada
здесь
ARKADA зеркало
Adoro o swing de BacanaPlay Casino, oferece uma aventura de cassino que pulsa como um tamborim. A gama do cassino e simplesmente um sambodromo de prazeres, com slots de cassino tematicos de carnaval. Os agentes do cassino sao rapidos como um passista na avenida, respondendo mais rapido que um batuque de pandeiro. Os saques no cassino sao velozes como um carro alegorico, as vezes queria mais promocoes de cassino que botam pra quebrar. No geral, BacanaPlay Casino e o point perfeito pros fas de cassino para os viciados em emocoes de cassino! Vale dizer tambem o design do cassino e um desfile visual vibrante, o que torna cada sessao de cassino ainda mais animada.
jogar bacanaplay|
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
Между прочим, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Вот, можете почитать:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
продолжить
водка бет
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
здесь
vodkabet зеркало
посмотреть на этом сайте
casino vodka
Источник
casino vodka
Узнать больше
водкабет играть сейчас
Источник
vodkabet онлайн казино
взгляните на сайте здесь
vodkabet новый сайт
Sou totalmente viciado em PlayPIX Casino, oferece um prazer intenso e indomavel. A variedade de titulos e estonteante, suportando jogos compativeis com criptomoedas. O bonus de boas-vindas e cativante. O suporte ao cliente e excepcional, sempre pronto para resolver. O processo e simples e elegante, embora mais rodadas gratis seriam um diferencial. Para finalizar, PlayPIX Casino e essencial para jogadores para jogadores em busca de adrenalina ! Vale destacar a interface e fluida e estilosa, instiga a prolongar a experiencia. Outro destaque os eventos comunitarios envolventes, proporciona vantagens personalizadas.
http://www.playpixcasino.pro|
Sou totalmente viciado em BETesporte Casino, sinto um rugido de adrenalina. O catalogo e vibrante e diversificado, com slots modernos e tematicos. O bonus de boas-vindas e empolgante. Os agentes respondem com velocidade, acessivel a qualquer hora. Os saques sao rapidos como um drible, de vez em quando recompensas extras seriam um hat-trick. Para finalizar, BETesporte Casino garante diversao constante para amantes de apostas esportivas ! Alem disso o design e moderno e vibrante, tornando cada sessao mais competitiva. Notavel tambem os pagamentos seguros em cripto, que impulsiona o engajamento.
Ler os detalhes|
Для тех, кто ищет качественное и современное решение для своего жилища, окна пластиковые москва московская область купить станут отличным выбором, предлагая повышенную энергоэффективность, долговечность и комфорт .
Пластиковые окна приобрели широкую популярность среди потребителей, благодаря их прочности и доступности . Одним из наиболее важных преимуществ пластиковых окон является их способность сохранять тепло в помещении, что может значительно снизить расходы на отопление и охлаждение . При подборе пластиковых окон, следует обратить внимание на такие характеристики, как тип материала, количество камер и тип уплотнителей .
Пластиковые окна обладают рядом преимуществ, которые делают их привлекательным вариантом для многих людей, включая их долговечность и устойчивость к погодным условиям . Пластиковые окна обладают уникальными свойствами, такими как их способность снижать уровень шума, что может привести к улучшению качества жизни. При покупке пластиковых окон, важно обратить внимание на такие факторы, как качество материала и технология производства . Пластиковые окна могут быть выполнены в разных вариантах, что позволяет выбрать наиболее подходящий вариант для дома или офиса .
Установка пластиковых окон должна быть осуществлена опытными мастерами, чтобы гарантировать долгий срок службы и эффективность. Обслуживание пластиковых окон предполагает регулярную очистку и осмотр профиля, что может помочь поддерживать их внешний вид и функциональность . При регулярном обслуживании, пластиковые окна могут сохранять свою функциональность и внешний вид на протяжении многих лет. Пластиковые окна могут быть легко отремонтированы или заменены, если это необходимо, что может быть выгодным вариантом .
При выборе пластиковых окон, следует обратить внимание на такие характеристики, как тип профиля, качество стеклопакета и гарантийное обслуживание . Пластиковые окна могут быть отличным выбором для дома или офиса, обеспечивая низкую стоимость содержания, высокую энергоэффективность и долгий срок службы . Перед покупкой пластиковых окон, необходимо обратиться за советом к специалистам и ознакомиться с отзывами других потребителей, чтобы сделать правильный выбор. Пластиковые окна могут стать отличным дополнением к вашему дому или офису, обеспечивая комфорт, энергоэффективность и долговечность .
Guzellik s?rlar?n? ve trendlerin ard?ndaki detaylar? kesfetmeye haz?r olun.
Yeri gelmisken, eger Pratik ve Lezzetli Tariflerle Mutfak Keyfi ile ilgileniyorsan?z, buraya goz at?n.
Iste, linki paylas?yorum:
https://sevgiylepisir.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
Ich bin vollig hingerissen von PlayJango Casino, es bietet ein Casino-Abenteuer, das wie ein Regenbogen funkelt. Die Auswahl im Casino ist ein echtes Spektakel, inklusive stilvoller Casino-Tischspiele. Der Casino-Support ist rund um die Uhr verfugbar, ist per Chat oder E-Mail erreichbar. Auszahlungen im Casino sind schnell wie ein Sturm, ab und zu mehr Freispiele im Casino waren ein Volltreffer. Alles in allem ist PlayJango Casino eine Casino-Erfahrung, die wie ein Regenbogen glitzert fur Spieler, die auf elektrisierende Casino-Kicks stehen! Zusatzlich das Casino-Design ist ein optisches Spektakel, das Casino-Erlebnis total elektrisiert.
playjango estafa|
Estou alucinado com BR4Bet Casino, vibra como um farol em alto-mar. Tem uma enxurrada de jogos de cassino irados. oferecendo lives que acendem como fogueiras. Os agentes voam como claroes. respondendo veloz como uma chama acesa. Os saques voam como um facho de luz. porem mais bonus seriam um diferencial reluzente. No fim das contas, BR4Bet Casino garante um jogo que reluz como um farol para os faroleiros do cassino! E mais o design e fluido como uma lanterna. criando uma experiencia de cassino reluzente.
br4bet saldo bloqueado|
Добро пожаловать в удивительный мир природы России!
Для тех, кто ищет информацию по теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Смотрите сами:
https://alloopt.ru
Рад был поделиться с вами этой информацией. До новых встреч!
Продолжение vodkabet
Estou completamente alucinado por SpeiCasino, da uma energia de cassino que e pura luz cosmica. A selecao de titulos do cassino e um buraco negro de emocoes, incluindo jogos de mesa de cassino com um toque cosmico. O atendimento ao cliente do cassino e uma estrela-guia, garantindo suporte de cassino direto e sem buracos negros. Os pagamentos do cassino sao lisos e blindados, porem queria mais promocoes de cassino que explodem como estrelas. Na real, SpeiCasino e um cassino online que e uma supernova de diversao para os apaixonados por slots modernos de cassino! E mais a plataforma do cassino brilha com um visual que e puro cosmos, o que torna cada sessao de cassino ainda mais estelar.
spei free money code 2023|
Продолжение
casino arkada
Estou completamente ressonado por JonBet Casino, parece uma camara de ecos cheia de adrenalina. Tem uma enxurrada de jogos de cassino irados. com caca-niqueis que vibram como harpas. O servico e confiavel como uma camara. respondendo veloz como uma vibracao. Os saques sao velozes como uma onda sonora. em alguns momentos mais recompensas fariam o coracao ecoar. No geral, JonBet Casino e um reverb de emocoes para os fas de adrenalina sonora! De lambuja o layout e vibrante como uma corda. criando uma experiencia de cassino harmonica.
afiliado jonbet|
продолжить
казино водка бет
Для тех, кто нуждается в высококачественных услугах перевода, компания бюро переводов москва предлагает широкий спектр переводческих услуг, включая перевод документов, технический перевод и многое другое.
Бюро переводов представляет собой компанию, специализирующуюся на предоставлении услуг перевода текстов и документов на различные языки. Существует большое количество бюро переводов, каждое из которых имеет свои особенности и преимущества. Бюро переводов также могут предлагать услуги перевода для бизнеса, образования и туризма. Клиенты выбирают бюро переводов в зависимости от своих потребностей и требований.
Кроме того, бюро переводов может предоставлять услуги по локализации контента для различных регионов и стран.
Клиенты могут заказать услуги бюро переводов онлайн, через форму на сайте или по телефону.
Бюро переводов также использует современные технологии для обеспечения скорости и эффективности перевода.
Бюро переводов играет важную роль в обеспечении эффективного общения между людьми и организациями, говорящими на разных языках.
Website https://ipodtouch3g.ru/ .
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
Sagl?kl? Beslenme ve Kulturel Lezzetler Kesfi hakk?ndaki yaz? ozellikle hosuma gitti.
Kendiniz bak?n:
https://tarifkasif.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
Estou vidrado no BacanaPlay Casino, tem uma vibe de jogo tao animada quanto uma bateria de escola de samba. A gama do cassino e simplesmente um sambodromo de prazeres, com slots de cassino tematicos de carnaval. O servico do cassino e confiavel e cheio de swing, dando solucoes na hora e com precisao. Os ganhos do cassino chegam voando como confetes, mesmo assim mais recompensas no cassino seriam um diferencial festivo. No fim das contas, BacanaPlay Casino oferece uma experiencia de cassino que e puro axe para os viciados em emocoes de cassino! E mais a navegacao do cassino e facil como um passo de frevo, o que torna cada sessao de cassino ainda mais animada.
bacanaplay jogos de cassino|
Каждый клик — часть цифровой эры кракен onion сайт кракен darknet кракен onion кракен ссылка onion
смотреть здесь
vodkabet прямо сейчас
узнать больше
ARKADA бонус
посмотреть в этом разделе
arkada
взгляните на сайте здесь
vodkabet онлайн казино
Hello there! I really enjoy reading your blog! If you keep making amazing posts like this I will come back every day to keep reading.
**flowforce max**
flowforce max delivers a forward-thinking, plant-focused way to support prostate health—while also helping maintain everyday energy, libido, and overall vitality.
Amo a energia selvagem de PlayPIX Casino, e uma plataforma que transborda vitalidade. O catalogo e exuberante e diversificado, oferecendo jogos de mesa envolventes. Com uma oferta inicial para impulsionar. O acompanhamento e impecavel, com suporte rapido e preciso. As transacoes sao confiaveis, de vez em quando mais rodadas gratis seriam um diferencial. No geral, PlayPIX Casino garante diversao constante para amantes de emocoes fortes ! Adicionalmente a interface e fluida e estilosa, instiga a prolongar a experiencia. Igualmente impressionante os pagamentos seguros em cripto, que aumenta o engajamento.
Clicar para ver|
здесь
casino arkada
Узнать больше
vodkabet прямо сейчас
This tool provides organized access to movie recommendations.Each selection features curated posters, official trailers, and accessible streaming options,and the collections are organized by themes and categories.The content is regularly updated with new additions.This approach streamlines your search by bringing together all necessary elements.You can explore these resources whenever you like.
Начнем путешествие по магическим уголкам российских заповедников.
Кстати, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Смотрите сами:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
узнать больше Здесь
casino vodka
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
Bu arada, eger En Populer Yemek ve Diyet Ipuclar? ile ilgileniyorsan?z, buraya bir bak?n.
Asag?daki linke bakabilirsiniz:
https://ascieli.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
online talk
зайти на сайт
casino vodka
**neurogenica**
neurogenica is a dietary supplement formulated to support nerve health and ease discomfort associated with neuropathy.
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
Ask ve Tutku ile Mutfak Tarifleri Kesfi hakk?ndaki bolum dikkate degerdi.
Burada okuyabilirsiniz:
https://yemekruhu.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
**cellufend**
cellufend is a natural supplement developed to support balanced blood sugar levels through a blend of botanical extracts and essential nutrients.
my latest blog post https://toast-wallet.net/
find more info https://jaxx-web.org
**prodentim**
prodentim is a forward-thinking oral wellness blend crafted to nurture and maintain a balanced mouth microbiome.
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
Особенно понравился материал про Изучение ООПТ России: парки, заповедники, водоемы.
Вот, можете почитать:
https://alloopt.ru
Что думаете о красоте природы России? Делитесь мнениями!
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
Bu arada, eger Ev Dekorasyonunda Modern Ipuclar? ve Trendler ile ilgileniyorsan?z, buraya bir bak?n.
Kendiniz bak?n:
https://evimturk.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
reference https://toast-wallet.net
my site https://jaxx-web.org
Resources https://toast-wallet.net/
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
“Zarafetin Is?g?: Moda ve Kulturun Bulusmas?” konusunda bilgi arayanlar icin cok faydal? bilgiler buldum.
Kendiniz bak?n:
https://stilvezarafet.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
**revitag**
revitag is a daily skin-support formula created to promote a healthy complexion and visibly diminish the appearance of skin tags.
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
Хочу выделить раздел про Изучение ООПТ России: парки, заповедники, водоемы.
Ссылка ниже:
https://alloopt.ru
Вот такое у нас получилось погружение в мир природы.
This site offers a handpicked approach to film discovery.Each selection features high-quality posters, engaging trailers, and convenient streaming links,and the collections are organized by themes and categories.The content is regularly updated with fresh picks.This approach saves you time by consolidating resources in one place.You can utilize this tool for your viewing pleasure.
Для всех любителей вечеринок и отдыха доставка алкоголя москва 24/7 становится незаменимым вариантом.
Доставка алкоголя круглосуточно становится все более популярной услугой в современном обществе . Это связано с тем, что люди часто хотят наслаждаться своими любимыми напитками в удобное для них время . Удобство доставки алкоголя в любое время суток заключается в том, что его можно получить прямо у себя дома .
Развитие технологий также сыграло значительную роль в росте популярности доставки алкоголя . Для заказа доставки алкоголя можно использовать как мобильные приложения, так и специализированные веб-платформы. С помощью современных технологий заказать доставку алкоголя стало намного проще.
Преимущества доставки алкоголя круглосуточно включают в себя удобство и доступность . Доставка алкоголя прямо к себе домой – это то, что делает эту услугу особенно привлекательной. Такая услуга особенно ценна для тех, у кого ограничено время или кто предпочитает домашний отдых .
Круглосуточная доставка алкоголя может быть более безопасным вариантом, чем поход в магазин. Клиенты не должны беспокоиться о transporte или парковке . Таким образом, снижается риск вождения в состоянии опьянения .
Для заказа доставки алкоголя необходимо следовать простым шагам . Каталог доступных алкогольных напитков предлагает клиентам широкий выбор. Затем клиент указывает свой адрес и предпочитаемое время доставки. После оформления заказа его обрабатывают и доставляют в указанное время .
Некоторые сервисы доставки алкоголя предлагают возможность отслеживать заказ . Клиенты могут планировать получение своего заказа, зная его статус. Компании также могут предоставлять информацию о статусе доставки . Это позволяет клиентам оставаться в курсе и планировать заранее .
Будущее доставки алкоголя выглядит перспективным, с все большим количеством компаний, предлагающих эту услугу . Технологические достижения и растущий спрос на удобные услуги будут способствовать дальнейшему развитию . Компании будут вкладывать средства в улучшение качества услуг и расширение ассортимента .
В результате akan увеличиться разнообразие вариантов доставки и улучшится качество обслуживания . Клиенты будут иметь возможность выбирать из более широкого спектра вариантов и получать еще более комфортный сервис . Доставка алкоголя круглосуточно продолжит эволюционировать и совершенствоваться, чтобы удовлетворять меняющиеся потребности клиентов .
you could look here https://jaxx-web.org
see this page https://toast-wallet.net/
Yeniliklere ac?k ve her daim cekici gorunmek isteyenler icin tuyolar.
Bu arada, eger Mutfakta Yenilikci Deneyimler ve Lezzetli Yolculuklar ile ilgileniyorsan?z, buraya bir bak?n.
Iste, linki paylas?yorum:
https://mutfakkeyfi.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
анонимная наркологическая помощь http://narkologicheskaya-klinika-20.ru/ .
Веб сайт https://urkarl.ru/
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
Bu arada, eger Mutfakta Yenilikci Deneyimler ve Lezzetli Yolculuklar ile ilgileniyorsan?z, buraya bir bak?n.
Burada okuyabilirsiniz:
https://mutfakkeyfi.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
Зацепил материал про Изучение ООПТ России: парки, заповедники, водоемы.
Ссылка ниже:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
https://bsm-e.at
Backlinks for your site
Functional on all topics of the portal.
I build reference links to your site.
My backlinks draw in Google crawlers to the page, that is very important for SEO, thus it is essential to promote a platform without defects that affect negatively visibility.
Posting poses no risk for your site!
I don’t submit in contact forms, (contact forms pose risks to the resource since users file complaints from administrators).
Placement is carried out in authorized locations.
Links are added to their latest frequently updated index. A large number of platforms in the database.
a fantastic read https://toast-wallet.net/
Для успешного решения бизнес-задач и повышения эффективности компании часто обращаются к услугам услуги консалтинговой фирмы, которая может предоставить профессиональную консультацию и поддержку в различных областях бизнеса.
специализируется на оказании консультационных услуг компаниям . Основная цель такой фирмы заключается в предоставлении экспертных рекомендаций для улучшения бизнес-стратегий . Консалтинговые фирмы оказывают существенное влияние на развитие компаний.
Консалтинговая фирма обычно начинает свой путь с небольшой команды экспертов . В составе таких фирм работают опытные консультанты со специализированными знаниями . Эти фирмы предлагают индивидуальные решения для каждого клиента .
Консалтинговая фирма предоставляет услуги по оптимизации бизнес-процессов . Эти услуги охватывают всю сферу деятельности компании, от производства до сбыта. Консалтинговые фирмы могут специализироваться на конкретных отраслях или??ах бизнеса .
Консалтинговая фирма применяет лучшие практики управления и развития бизнеса . В своей работе консалтинговые фирмы ориентируются на достижение конкретных результатов и улучшение показателей деятельности клиентов .
Работа с консалтинговой фирмой приводит к увеличению эффективности и прибыльности бизнеса . Консалтинговые фирмы предлагают объективную оценку и рекомендации для улучшения бизнес-стратегий.
Консалтинговая фирма может оказать существенную помощь в решении кризисных ситуаций . Работа с консалтинговыми фирмами позволяет компаниям оперативно реагировать на изменения рыночной конъюнктуры.
При выборе консалтинговой фирмы необходимо учитывать ее репутацию и опыт работы . Компания должна оценить профессионализм и квалификацию ее сотрудников .
Консалтинговая фирма должна обеспечить высокий уровень сервиса и поддержки на всех этапах сотрудничества. Выбрав подходящую консалтинговую фирму, компания сможет значительно улучшить свое положение на рынке .
спорт новости спорт новости .
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
“Fonksiyon ve Estetik: Mobilya ve Dekorasyon Onerileri” konusunda bilgi arayanlar icin oras? tam bir bilgi hazinesi.
Asag?daki linke bakabilirsiniz:
https://dogalyasammobilya.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
Estou pirando com DazardBet Casino, da uma energia de cassino totalmente insana. A gama do cassino e simplesmente um espetaculo, com slots de cassino unicos e vibrantes. O suporte do cassino esta disponivel 24/7, respondendo num piscar de olhos. Os pagamentos do cassino sao suaves e seguros, de vez em quando as ofertas do cassino podiam ser mais generosas. Resumindo, DazardBet Casino e o point perfeito pros fas de cassino para os piratas dos slots modernos de cassino! De bonus a plataforma do cassino arrasa com um visual eletrizante, da um toque de classe ao cassino.
dazardbet casino bonus|
Для получения качественных услуг по переводу документов на любой язык и с необходимым заверением обращайтесь в перевод водительского удостоверения.
Бюро переводов также оказывает услуги по интерпретации, что позволяет осуществлять устные переводы в режиме реального времени.
Бюро переводов также использует современные технологии и инструменты, чтобы обеспечить эффективность и скорость переводческого процесса.
Услуги бюро переводов могут быть разделены на различные категории, такие как технический перевод, юридический перевод и медицинский перевод.
Бюро переводов должно иметь гибкую систему управления проектами, чтобы удовлетворять индивидуальные потребности каждого клиента.
Начнем путешествие по магическим уголкам российских заповедников.
Зацепил материал про Изучение ООПТ России: парки, заповедники, водоемы.
Вот, можете почитать:
https://alloopt.ru
Природа – наш главный учитель и защитник. Берегите её!
прогнозы на спорт от экспертов prognozy-ot-professionalov4.ru .
новости спорта новости спорта .
Веб сайт https://urkarl.ru/
Ich liebe die Pracht von King Billy Casino, es bietet ein Casino-Abenteuer, das wie ein Kronungsfest funkelt. Die Auswahl im Casino ist ein wahres Kronungsjuwel, mit einzigartigen Casino-Slotmaschinen. Das Casino-Team bietet Unterstutzung, die wie ein Zepter glanzt, mit Hilfe, die wie ein Thron majestatisch ist. Casino-Transaktionen sind simpel wie ein koniglicher Befehl, dennoch mehr regelma?ige Casino-Boni waren koniglich. Zusammengefasst ist King Billy Casino ein Online-Casino, das wie ein Konigreich strahlt fur Fans von Online-Casinos! Zusatzlich das Casino-Design ist ein optisches Kronungsjuwel, einen Hauch von Majestat ins Casino bringt.
king billy casino nz|
Estou completamente enfeiticado por SpellWin Casino, tem uma vibe de jogo tao fascinante quanto um grimorio antigo. A gama do cassino e simplesmente um feitico de prazeres, com jogos de cassino perfeitos pra criptomoedas. A equipe do cassino entrega um atendimento que e puro encantamento, garantindo suporte de cassino direto e sem maldicoes. As transacoes do cassino sao simples como uma runa, de vez em quando mais giros gratis no cassino seria uma loucura magica. No geral, SpellWin Casino vale demais explorar esse cassino para os amantes de cassinos online! Vale dizer tambem o design do cassino e um espetaculo visual encantado, faz voce querer voltar ao cassino como num desejo concedido.
spellwin casino recenzja|
2023 y?l?na damgas?n? vuran guzellik ve kozmetik trendlerini sizler icin derledik.
Yeri gelmisken, eger En Son Moda Trendleri: S?kl?k ve Konfor ile ilgileniyorsan?z, buraya goz at?n.
Asag?daki linke bakabilirsiniz:
https://turktekstil.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
Sou louco pela energia de BetorSpin Casino, parece uma explosao cosmica de adrenalina. Tem uma chuva de meteoros de jogos de cassino irados, incluindo jogos de mesa de cassino com um toque intergalactico. O suporte do cassino ta sempre na ativa 24/7, respondendo mais rapido que uma explosao de raios gama. O processo do cassino e limpo e sem turbulencia cosmica, mas as ofertas do cassino podiam ser mais generosas. No fim das contas, BetorSpin Casino garante uma diversao de cassino que e uma supernova para os apaixonados por slots modernos de cassino! Alem disso a navegacao do cassino e facil como uma orbita lunar, faz voce querer voltar ao cassino como um cometa em orbita.
betorspin e confiГЎvel|
Amo a energia de BETesporte Casino, me leva a um universo de apostas vibrante. As opcoes sao amplas como um gramado, com slots modernos e tematicos. Fortalece seu saldo inicial. A assistencia e eficiente e amigavel, sempre pronto para entrar em campo. O processo e simples e direto, embora mais apostas gratis seriam incriveis. No fim, BETesporte Casino vale uma aposta certa para quem usa cripto para jogar ! Alem disso a navegacao e intuitiva e envolvente, instiga a prolongar o jogo. Outro destaque os torneios regulares para rivalidade, que impulsiona o engajamento.
Explorar o site|
Achou loucamente incrivel DazardBet Casino, oferece uma experiencia de cassino que e fogo puro. A gama do cassino e simplesmente um espetaculo, com jogos de cassino perfeitos para criptomoedas. A equipe do cassino garante um atendimento estelar, respondendo num piscar de olhos. Os saques no cassino sao rapidos como um foguete, de vez em quando queria mais promocoes de cassino que arrebentam. No geral, DazardBet Casino garante uma diversao de cassino fora de serie para os aventureiros do cassino! De bonus o site do cassino e uma obra-prima grafica, torna o cassino uma curticao total.
dazardbet auszahlung|
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
Зацепил раздел про Изучение ООПТ России: парки, заповедники, водоемы.
Ссылка ниже:
https://alloopt.ru
Рад был поделиться с вами этой информацией. До новых встреч!
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
Modern Modada Stil Ipuclar? ve Trendler hakk?ndaki bolum ozellikle hosuma gitti.
Kendiniz bak?n:
https://modakasifi.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
Ich finde absolut majestatisch King Billy Casino, es pulsiert mit einer koniglichen Casino-Energie. Der Katalog des Casinos ist eine Schatzkammer voller Spa?, mit modernen Casino-Slots, die verzaubern. Der Casino-Support ist rund um die Uhr verfugbar, liefert klare und schnelle Losungen. Casino-Gewinne kommen wie ein Triumphzug, ab und zu wurde ich mir mehr Casino-Promos wunschen, die glanzvoll sind. Am Ende ist King Billy Casino eine Casino-Erfahrung, die wie ein Palast glitzert fur Abenteurer im Casino! Ubrigens das Casino-Design ist ein optisches Kronungsjuwel, Lust macht, immer wieder ins Casino zuruckzukehren.
king billy casino malaysia|
Estou alucinado com SpellWin Casino, da uma energia de cassino que e pura magia. As opcoes de jogo no cassino sao ricas e hipnotizantes, oferecendo sessoes de cassino ao vivo que brilham como runas. O suporte do cassino ta sempre na ativa 24/7, dando solucoes na hora e com precisao. Os saques no cassino sao velozes como um feitico de teletransporte, mas as ofertas do cassino podiam ser mais generosas. Resumindo, SpellWin Casino e um cassino online que e um portal de diversao para os magos do cassino! Vale dizer tambem a interface do cassino e fluida e brilha como uma pocao reluzente, torna a experiencia de cassino um conto de fadas.
spellwin login|
Acho simplesmente estelar BetorSpin Casino, da uma energia de cassino que e puro pulsar galactico. Tem uma chuva de meteoros de jogos de cassino irados, com caca-niqueis de cassino modernos e hipnotizantes. A equipe do cassino entrega um atendimento que e puro cometa, garantindo suporte de cassino direto e sem buracos negros. Os ganhos do cassino chegam voando como um asteroide, mas mais giros gratis no cassino seria uma loucura estelar. Na real, BetorSpin Casino e um cassino online que e uma galaxia de diversao para os astronautas do cassino! E mais a navegacao do cassino e facil como uma orbita lunar, torna a experiencia de cassino uma viagem espacial.
jogos de betorspin|
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
Bu arada, eger En Son Moda Trendleri: S?kl?k ve Konfor ile ilgileniyorsan?z, buraya bir bak?n.
Asag?daki linke bakabilirsiniz:
https://turktekstil.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
Fiquei fascinado com PlayPIX Casino, oferece um prazer eletrizante. Ha uma explosao de jogos emocionantes, incluindo apostas esportivas que aceleram o coracao. Com uma oferta inicial para impulsionar. Os agentes respondem com agilidade, sempre pronto para resolver. Os pagamentos sao seguros e fluidos, as vezes bonus mais variados seriam incriveis. No geral, PlayPIX Casino oferece uma experiencia memoravel para entusiastas de jogos modernos ! Acrescentando que o site e rapido e cativante, facilita uma imersao total. Outro destaque as opcoes variadas de apostas esportivas, fortalece o senso de comunidade.
Saber mais|
Для эффективного и экологически чистого утилизации отходов любой строительной площадки необходимо заказать вывезти строительный мусор москва, чтобы своевременно очистить территорию от строительных отходов и избежать штрафов за загрязнение окружающей среды.
Удаление строительного мусора является важным этапом в любом строительном или ремонтном проекте . Это включает в себя не только сами строительные материалы, но и упаковку от них, а также случайные обломки и отходы. Выбор метода вывоза строительного мусора зависит от характера и количества мусора.
Для эффективной организации вывоза строительного мусора необходимо учитывать несколько факторов, включая тип и количество мусора, а также наличие специализированного оборудования. Специализированные компании по вывозу мусора могут предоставить необходимое оборудование и??ные услуги . Кроме того, важно соблюдать все экологические и санитарные нормы, чтобы не нанести вред окружающей среде. Правильное обращение с строительным мусором помогает сохранить экологический баланс.
Практические аспекты вывоза строительного мусора включают в себя не только его сбор, но и транспортировку и утилизацию. Транспортировка строительного мусора должна быть организована с учетом минимального воздействия на окружающую среду . Это также предполагает сортировку мусора для его дальнейшей переработки или утилизации. Правильная сортировка строительных отходов может снизить количество отходов, отправляемых на свалки .
В заключение, вывоз строительного мусора является важнейшим компонентом любого строительного или ремонтного проекта, направленным на обеспечение безопасности, чистоты и экологической устойчивости. Правильный вывоз строительного мусора может существенно повлиять на общий результат строительства . Развитие технологий и методов вывоза строительного мусора будет играть важную роль в решении экологических проблем .
Откройте для себя прекрасные и загадочные места, которые находятся под охраной в нашей стране.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Смотрите сами:
https://alloopt.ru
Рад был поделиться с вами этой информацией. До новых встреч!
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
“Sagl?kl? Beslenme ve Kulturel Lezzetler Kesfi” konusunda bilgi arayanlar icin cok faydal? bilgiler buldum.
Burada okuyabilirsiniz:
https://tarifkasif.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
bs2best зеркало Заинтересован, что будоражит тёмную сеть? Blacksprut — это не просто название, это эталон анонимности, оперативности и уверенности. Добро пожаловать на bs2best.at — место, где открывают то, о чём принято умалчивать. Здесь ты получишь доступ к запретному плоду. Только для избранных. Без улик. Без уступок. Только Blacksprut. Не упусти возможность стать первопроходцем — bs2best.at уже готов раскрыть свои секреты. Хватит ли тебе смелости взглянуть правде в лицо?
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
Zarafetin Is?g?: Moda ve Kulturun Bulusmas? hakk?ndaki bolum dikkate degerdi.
Asag?daki linke bakabilirsiniz:
https://stilvezarafet.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
This resource is designed to help you discover new movies.Each selection includes posters, trailers, and direct links to streaming services,and the collections are arranged for easy browsing.Fresh content is regularly incorporated to enhance the offerings.This approach saves you time by consolidating resources on a single platform.You can explore these resources at your convenience.
Начнем путешествие по магическим уголкам российских заповедников.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Ссылка ниже:
https://alloopt.ru
Жду ваших отзывов и вопросов по теме.
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
Yeri gelmisken, eger Moda ve Stil: Yeni Baslang?c icin Ipuclar? ile ilgileniyorsan?z, buraya goz at?n.
Iste, linki paylas?yorum:
https://siktarz.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
I’ve been using mushrooms vape ordinary in regard to all about a month for the time being, and I’m indeed impressed by the absolute effects. They’ve helped me perceive calmer, more balanced, and less restless throughout the day. My saw wood is deeper, I wake up refreshed, and sober my core has improved. The quality is famous, and I appreciate the natural ingredients. I’ll categorically carry on buying and recommending them to everybody I know!
Instala la versiГіn mГЎs estable vГa 1xslots apk descargar.
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
Bu arada, eger Fonksiyon ve Estetik: Mobilya ve Dekorasyon Onerileri ile ilgileniyorsan?z, buraya bir bak?n.
Kendiniz bak?n:
https://dogalyasammobilya.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
Upgrade your anonymity game with an antidetect browser. Designed for large agencies and advanced users, it offers robust features for automation, team collaboration, and high-level digital stealth.
online business
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
Modern Modada Stil Ipuclar? ve Trendler hakk?ndaki bolum ozellikle hosuma gitti.
Kendiniz bak?n:
https://modakasifi.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
Вас интересуют природные богатства России? Давайте исследуем их вместе!
Особенно понравился материал про Изучение ООПТ России: парки, заповедники, водоемы.
Вот, делюсь ссылкой:
https://alloopt.ru
Вот такое у нас получилось погружение в мир природы.
Для решения сложных бизнес-задач и повышения эффективности работы компаний часто обращаются в консалтинговые фирмы, которая предоставляет профессиональные услуги по разработке и реализации стратегий развития.
Консалтинговая фирма помогает клиентам достигать своих целей и преодолевать вызовы. Консалтинговая фирма имеет опыт работы с компаниями разных размеров и сфер деятельности. Консалтинговые услуги фирмы включают помощь в принятии решений и реализации изменений.
Консалтинговая фирма использует индивидуальный подход к каждому клиенту и разработку персональных решений. Консалтинговая фирма уделяет большое внимание конфиденциальности и безопасности информации клиентов. Фирма имеет опыт работы с государственными учреждениями и понимает особенности государственного сектора .
Консалтинговая фирма помогает клиентам в разработке и реализации инновационных проектов. Консалтинговая фирма имеет опыт работы в области финансового консалтинга и аудита. Консалтинговые услуги фирмы включают помощь в привлечении инвестиций и финансирования проектов .
Консалтинговая фирма использует современные технологии и инструменты для предоставления услуг . Консалтинговая фирма имеет сильную команду профессионалов с большим опытом работы. Фирма предоставляет услуги по анализу и оптимизации операционных процессов.
Консалтинговая фирма предлагает индивидуальный подход и персональные решения для каждого клиента . Консалтинговая фирма использует современные методы и инструменты для анализа данных и предоставления рекомендаций. Консалтинговые услуги фирмы включают помощь в решении проблем и преодолении вызовов .
Консалтинговая фирма имеет опыт работы с международными компаниями и понимает особенности глобального рынка . Консалтинговая фирма предоставляет услуги, которые помогают клиентам улучшать свою конкурентоспособность. Фирма предоставляет услуги по анализу и оптимизации операционных процессов.
Консалтинговая фирма является профессиональным партнером для компаний, которые стремятся улучшить свою эффективность и результаты . Консалтинговая фирма использует современные методы и инструменты для анализа данных и предоставления рекомендаций. Консалтинговые услуги фирмы включают помощь в решении проблем и преодолении вызовов .
Консалтинговая фирма уделяет большое внимание качеству и удовлетворению клиентов. Консалтинговая фирма предоставляет услуги, которые помогают клиентам улучшать свою конкурентоспособность. Фирма предоставляет услуги по созданию и реализации бизнес-планов и стратегий .
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
“Zarafetin Is?g?: Moda ve Kulturun Bulusmas?” konusunda bilgi arayanlar icin cok faydal? bilgiler buldum.
Asag?daki linke bakabilirsiniz:
https://stilvezarafet.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
Sou viciado em BETesporte Casino, sinto uma energia de estadio. A selecao de jogos e fenomenal, com slots modernos e tematicos. 100% ate R$600 + apostas gratis. Os agentes respondem com velocidade, com suporte preciso e rapido. As transacoes sao confiaveis, de vez em quando ofertas mais generosas dariam um toque especial. Para finalizar, BETesporte Casino vale uma aposta certa para entusiastas de jogos modernos ! Alem disso o site e veloz e envolvente, instiga a prolongar o jogo. Outro destaque as opcoes variadas de apostas esportivas, proporciona vantagens personalizadas.
Continuar lendo|
Estou completamente encantado por PlayPIX Casino, proporciona uma aventura eletrizante. As opcoes sao vastas como um desfile, suportando jogos compativeis com criptomoedas. Com um bonus extra para comecar. A assistencia e eficiente e cortes, oferecendo respostas claras. O processo e simples e elegante, as vezes recompensas adicionais seriam festivas. No geral, PlayPIX Casino garante diversao a cada momento para jogadores em busca de adrenalina ! Adicionalmente a plataforma e visualmente espetacular, aumenta o prazer de jogar. Muito atrativo as opcoes variadas de apostas esportivas, fortalece o senso de comunidade.
Ler mais|
раскрутка сайта москва поисковое продвижение https://www.seo-prodvizhenie-reiting-kompanij.ru .
about me seo top-10-seo-prodvizhenie.ru .
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
Sagl?kl? Beslenme ve Kulturel Lezzetler Kesfi hakk?ndaki bolum dikkate degerdi.
Burada okuyabilirsiniz:
https://tarifkasif.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
Вас интересуют природные богатства России? Давайте исследуем их вместе!
Кстати, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Ссылка ниже:
https://alloopt.ru
Надеюсь, вы нашли это путешествие по природе познавательным.
Tenho uma paixao ardente por PlayPIX Casino, e uma plataforma que pulsa com energia festiva. A variedade de titulos e deslumbrante, incluindo apostas esportivas vibrantes. Fortalece seu saldo inicial. O servico esta disponivel 24/7, garantindo um atendimento de qualidade. Os ganhos chegam sem demora, as vezes bonus mais variados seriam bem-vindos. Em sintese, PlayPIX Casino garante diversao a cada momento para jogadores em busca de adrenalina ! Tambem a interface e fluida e elegante, instiga a prolongar a experiencia. Outro destaque os pagamentos seguros em cripto, que impulsiona o engajamento.
Clique agora|
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
Yeri gelmisken, eger Fonksiyonel ve Estetik Mobilya Cozumleri ile ilgileniyorsan?z, buraya bir bak?n.
Iste, linki paylas?yorum:
https://icmekanturk.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
рейтинг сео компаний рейтинг сео компаний .
Ich bin total begeistert von Lapalingo Casino, es pulsiert mit einer elektrisierenden Casino-Energie. Es gibt eine Welle an packenden Casino-Titeln, mit einzigartigen Casino-Slotmaschinen. Der Casino-Service ist zuverlassig und glanzend, sorgt fur sofortigen Casino-Support, der beeindruckt. Der Casino-Prozess ist klar und ohne Wellen, trotzdem wurde ich mir mehr Casino-Promos wunschen, die explodieren. Insgesamt ist Lapalingo Casino eine Casino-Erfahrung, die wie ein Regenbogen glitzert fur Fans moderner Casino-Slots! Nebenbei die Casino-Oberflache ist flussig und strahlt wie ein Nordlicht, Lust macht, immer wieder ins Casino zuruckzukehren.
lapalingo casino bonus code ohne einzahlung|
Acho simplesmente incendiario BetPrimeiro Casino, da uma energia de cassino que e puro magma. A gama do cassino e simplesmente uma explosao de delicias, com jogos de cassino perfeitos pra criptomoedas. Os agentes do cassino sao rapidos como uma labareda, respondendo mais rapido que uma explosao vulcanica. As transacoes do cassino sao simples como uma brasa, as vezes mais recompensas no cassino seriam um diferencial incendiario. Na real, BetPrimeiro Casino oferece uma experiencia de cassino que e puro magma para os viciados em emocoes de cassino! E mais o site do cassino e uma obra-prima de estilo vulcanico, o que torna cada sessao de cassino ainda mais incendiaria.
betprimeiro e confiГЎvel|
Sou viciado no role de DiceBet Casino, e um cassino online que e puro fogo. A selecao de titulos do cassino e um espetaculo a parte, oferecendo sessoes de cassino ao vivo que sao uma bomba. O atendimento ao cliente do cassino e uma maravilha, garantindo suporte de cassino direto e na lata. Os ganhos do cassino chegam voando, porem mais bonus regulares no cassino seria top. Em resumo, DiceBet Casino oferece uma experiencia de cassino que e puro gas para quem curte apostar com estilo no cassino! De lambuja a plataforma do cassino detona com um look que e puro fogo, da um toque de classe braba ao cassino.
dicebet reclame aqui|
Website https://beksai.ru/ .
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, нашел много полезного.
Вот, можете почитать:
https://alloopt.ru
Что думаете о красоте природы России? Делитесь мнениями!
indie music
2023 y?l?na damgas?n? vuran guzellik ve kozmetik trendlerini sizler icin derledik.
Yeri gelmisken, eger Mutfakta Yenilikci Deneyimler ve Lezzetli Yolculuklar ile ilgileniyorsan?z, buraya bir bak?n.
Asag?daki linke bakabilirsiniz:
https://mutfakkeyfi.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
Для обеспечения высокого уровня подготовки и комфорта посетителей фитнес-центров используются тренажеры для фитнес клуба, которые предназначены для развития силы, выносливости и гибкости, удовлетворяя различным потребностям и предпочтениям клиентов.
являются важнейшим элементом в любом спортзале . Они разработаны для удовлетворения потребностей профессиональных спортсменов и любителей. Профессиональные тренажеры дают возможность тренироваться в безопасных условиях.
Профессиональные тренажеры имеют прочную конструкцию . Они оборудованы системами амортизации для снижения нагрузки на суставы. Профессиональные тренажеры дают возможность тренироваться в группах или индивидуально.
Профессиональные тренажеры классифицируются по функциональному назначению . Силовые тренажеры предназначены для развития мышечной силы . Кардиотренажеры используются для сжигания калорий и повышения выносливости .
Функциональные тренажеры используются для развития координации и balance . Профессиональные тренажеры позволяют настраивать уровень сложности . Профессиональные тренажеры имеют высокое качество и долгий срок службы .
Профессиональные тренажеры являются обязательным атрибутом современного фитнес-пространства . Они дают возможность тренироваться в безопасных условиях. Профессиональные тренажеры разработаны для удовлетворения потребностей профессиональных спортсменов и любителей.
Профессиональные тренажеры позволяют тренировать несколько групп мышц одновременно . Они оборудованы системами амортизации для снижения нагрузки на суставы. Профессиональные тренажеры являются важнейшим элементом в любой спортзале .
Профессиональные тренажеры играют ключевую роль в развитии индустрии фитнеса . Они разработаны для удовлетворения потребностей профессиональных спортсменов и любителей. Профессиональные тренажеры обеспечивают возможность создания индивидуальных программ тренировок .
Профессиональные тренажеры имеют встроенные компьютеры для отслеживания прогресса . Профессиональные тренажеры обеспечивают широкий спектр упражнений . Профессиональные тренажеры имеют высокое качество и долгий срок службы .
Adoro a erupcao de BetPrimeiro Casino, parece uma cratera cheia de adrenalina. As opcoes de jogo no cassino sao ricas e escaldantes, oferecendo sessoes de cassino ao vivo que brilham como brasas. A equipe do cassino entrega um atendimento que e puro fogo, com uma ajuda que incendeia como uma tocha. Os saques no cassino sao velozes como uma corrente de lava, mesmo assim mais recompensas no cassino seriam um diferencial incendiario. Resumindo, BetPrimeiro Casino oferece uma experiencia de cassino que e puro magma para os vulcanologos do cassino! Vale dizer tambem o design do cassino e um espetaculo visual escaldante, faz voce querer voltar ao cassino como uma lava sem fim.
bГіnus betprimeiro|
Ich bin vollig geflasht von Lapalingo Casino, es fuhlt sich an wie ein wilder Ritt durch die Spielwelt. Es gibt eine Welle an packenden Casino-Titeln, inklusive stilvoller Casino-Tischspiele. Der Casino-Service ist zuverlassig und glanzend, sorgt fur sofortigen Casino-Support, der beeindruckt. Der Casino-Prozess ist klar und ohne Wellen, manchmal mehr Freispiele im Casino waren ein Volltreffer. Kurz gesagt ist Lapalingo Casino ein Muss fur Casino-Fans fur Abenteurer im Casino! Zusatzlich die Casino-Plattform hat einen Look, der wie ein Blitz funkelt, was jede Casino-Session noch aufregender macht.
lapalingo test|
Estou completamente louco por DiceBet Casino, tem uma vibe de jogo que explode tudo. A selecao de titulos do cassino e um espetaculo a parte, incluindo jogos de mesa de cassino cheios de classe. O atendimento ao cliente do cassino e uma maravilha, com uma ajuda que e um arraso. Os saques no cassino sao velozes como um cometa, de vez em quando mais recompensas no cassino seriam um diferencial brabo. Na real, DiceBet Casino e o lugar certo pros fas de cassino para os aventureiros do cassino! Alem disso a plataforma do cassino detona com um look que e puro fogo, o que deixa cada sessao de cassino ainda mais animal.
dicebet reclame aqui|
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
Yeri gelmisken, eger Zarafetin Is?g?: Moda ve Kulturun Bulusmas? ile ilgileniyorsan?z, buraya bir bak?n.
Asag?daki linke bakabilirsiniz:
https://stilvezarafet.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
Хотите узнать больше о природе нашей страны? Присоединяйтесь к обсуждению.
Между прочим, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, загляните сюда.
Вот, можете почитать:
https://alloopt.ru
Рад был поделиться с вами этой информацией. До новых встреч!
перенаправляется сюда casino vodka bet
узнать больше казино водка t_me_vodkarus_official
Веб сайт https://urkarl.ru/
узнать больше Здесь водка бет
2023 y?l?na damgas?n? vuran guzellik ve kozmetik trendlerini sizler icin derledik.
“Sagl?kl? Beslenme ve Kulturel Lezzetler Kesfi” konusuyla ilgili olarak harika bir makale var.
Iste, linki paylas?yorum:
https://tarifkasif.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
emeryflowers – Beautiful aesthetic, every section blooms with creativity and emotion.
Сегодня мы отправимся на виртуальную экскурсию в уникальные уголки природы России.
Кстати, если вас интересует Изучение ООПТ России: парки, заповедники, водоемы, посмотрите сюда.
Вот, делюсь ссылкой:
https://alloopt.ru
Рад был поделиться с вами этой информацией. До новых встреч!
нажмите здесь vodka bet
Sou viciado em PlayPIX Casino, proporciona uma aventura pulsante. A selecao de jogos e fenomenal, com slots de design inovador. O bonus de boas-vindas e empolgante. A assistencia e eficiente e amigavel, com suporte rapido e preciso. Os saques sao rapidos como um raio, no entanto mais rodadas gratis seriam um diferencial. Em sintese, PlayPIX Casino e uma plataforma que brilha para amantes de emocoes fortes ! Adicionalmente a plataforma e visualmente espetacular, instiga a prolongar a experiencia. Igualmente impressionante os pagamentos seguros em cripto, proporciona vantagens personalizadas.
Ir para o site|
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
nighttoshineatlanta – Beautifully inspiring event site, visuals radiate joy and inclusion.
интернет водка бет
вірш про тата який помер
douglasand55 – Very polished design, strong visuals and clear professional tone.
Guzellik ve kozmetik konusunda en guncel ipuclar? ve trendler burada!
Yeri gelmisken, eger Zarafetin Is?g?: Moda ve Kulturun Bulusmas? ile ilgileniyorsan?z, buraya goz at?n.
Asag?daki linke bakabilirsiniz:
https://stilvezarafet.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
nighttoshineatlanta – Beautifully inspiring event site, visuals radiate joy and inclusion.
neighborsforrandy – Friendly community feel, layout conveys care and connection effectively.
Представляем вашему вниманию национальные парки и заповедники России.
По теме “Изучение ООПТ России: парки, заповедники, водоемы”, есть отличная статья.
Вот, делюсь ссылкой:
https://alloopt.ru
Спасибо за внимание! Надеюсь, вам было интересно.
ehajjumrahtours – Professional and serene, the layout reflects faith and reliability.
Amo a energia de BETesporte Casino, e uma plataforma que vibra como um estadio lotado. O catalogo e vibrante e diversificado, com sessoes ao vivo cheias de energia. Eleva a experiencia de jogo. O servico esta disponivel 24/7, sempre pronto para entrar em campo. Os ganhos chegam sem atraso, de vez em quando mais apostas gratis seriam incriveis. No geral, BETesporte Casino garante diversao constante para quem usa cripto para jogar ! Acrescentando que o design e moderno e vibrante, instiga a prolongar o jogo. Muito atrativo as opcoes variadas de apostas esportivas, proporciona vantagens personalizadas.
Encontrar os detalhes|
Yeniliklere ac?k ve her daim cekici gorunmek isteyenler icin tuyolar.
Bu arada, eger Guzellik Ipuclar? ve Urun Incelemeleri ile ilgileniyorsan?z, buraya goz at?n.
Iste, linki paylas?yorum:
https://parlakten.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
Partner with HLAVA, s.r.o. in Prague for expert IT outsourcing services. From IT management to safety and cloud solutions, we supply trusted, scalable, and affordable technology strategies that aid businesses operate efficiently and firmly, https://bowles-kelly-2.technetbloggers.de/jak-mohou-outsourcingove-sluzby-it-zmenit-vasi-podnikani-postupy-v-praze.
ct2020highschoolgrads – Heartwarming initiative, celebrating graduates with positivity and pride.
Очень понравилось, что всё сделано со вкусом — приглушённый свет, тихая музыка, приветливый персонал. Девушка-мастер просто волшебница. Крайне рекомендую, проститутка недорого нск: https://sibirka.com/. Остался очень доволен, сервис и массаж на высоте.
saratogapolarexpressride – Magical and festive, captures the holiday spirit with great warmth.
luxnoe – Modern and stylish, this site exudes luxury and creative design.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
“Guzellik ve Kozmetik: Ipuclar? ve Trendler” konusunda bilgi arayanlar icin harika bir makale var.
Burada okuyabilirsiniz:
https://guzellikturk.com
Guzellik dunyas?nda kesfe c?kan herkese sonsuz basar?lar.
karen4assembly – Clear and sincere campaign tone, content reflects leadership and integrity.
stageofnations – Culturally rich, visuals celebrate unity and vibrant heritage beautifully.
Guzellik ve kozmetik konusunda en guncel ipuclar? ve trendler burada!
“Modern Modada Stil Ipuclar? ve Trendler” konusuyla ilgili olarak harika bir makale var.
Kendiniz bak?n:
https://modakasifi.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
Ich bin total begeistert von Trickz Casino, es ist ein Online-Casino, das wie ein Zauberstab funkelt. Es gibt eine Flut an fesselnden Casino-Titeln, mit Casino-Spielen, die fur Kryptowahrungen optimiert sind. Das Casino-Team bietet Unterstutzung, die wie ein Zauberspruch wirkt, ist per Chat oder E-Mail erreichbar. Casino-Zahlungen sind sicher und reibungslos, manchmal wurde ich mir mehr Casino-Promos wunschen, die wie Zaubertranke wirken. Zusammengefasst ist Trickz Casino eine Casino-Erfahrung, die wie ein Zaubertrick glanzt fur Spieler, die auf magische Casino-Kicks stehen! Zusatzlich die Casino-Plattform hat einen Look, der wie ein magischer Zirkus leuchtet, den Spielspa? im Casino auf ein magisches Niveau hebt.
trickz casino trustpilot|
Ich liebe den Zauber von Lapalingo Casino, es ist ein Online-Casino, das wie ein Blitz einschlagt. Es gibt eine Welle an packenden Casino-Titeln, mit modernen Casino-Slots, die einen in ihren Bann ziehen. Der Casino-Support ist rund um die Uhr verfugbar, liefert klare und schnelle Losungen. Casino-Gewinne kommen wie ein Sturm, ab und zu mehr regelma?ige Casino-Boni waren ein Knaller. Kurz gesagt ist Lapalingo Casino ein Muss fur Casino-Fans fur die, die mit Stil im Casino wetten! Ubrigens die Casino-Navigation ist kinderleicht wie ein Windhauch, Lust macht, immer wieder ins Casino zuruckzukehren.
lapalingo popup|
Je suis totalement electrifie par Donbet Casino, ca pulse comme un eclair foudroyant. La gamme est une eruption de delices, offrant des sessions live qui electrisent. Le service client est d’une efficacite foudroyante, garantissant un support d’une puissance rare. Le processus est lisse comme un jet, parfois les offres pourraient etre plus volcaniques. Dans l’ensemble, Donbet Casino est une plateforme qui fait trembler les sens pour les amateurs de sensations explosives ! En bonus le site est un chef-d’?uvre visuel explosif, ce qui rend chaque session absolument electrisante.
code bonus donbet|
Ich schatze sehr Billy Billion Casino, es ist wirklich ein mitrei?endes Spielerlebnis. Es gibt eine Vielzahl an abwechslungsreichen Spielen, inklusive topaktueller Slots von NetEnt und Pragmatic Play. Der Kundendienst ist tadellos, garantiert sofortige Hilfe per Chat oder E-Mail. Auszahlungen sind super schnell, oft in 1 Stunde fur Kryptowahrungen, gelegentlich ich mir mehr regelma?ige Aktionen wunschen wurde. Insgesamt ist Billy Billion Casino bietet ein sicheres und faires Spielerlebnis mit einem Sicherheitsindex von 8,5 fur Fans von Nervenkitzel! Au?erdem die Navigation ist intuitiv auf der mobilen iOS/Android-App, die Immersion verstarkt.
billy billion no deposit codes|
Recently the company drones show put on an amazing performance that amazed all the spectators.
an innovative form of entertainment that has revolutionized the way we experience light and sound . These events typically involve a large number of drones equipped with LED lights, which are programmed to fly in synchronization and create dazzling patterns and designs in the sky. The technology behind drone shows is continuously evolving, with advancements in drone design, lighting systems, and software allowing for more complex and sophisticated displays . As a result, drone shows have become an increasingly popular form of entertainment, with applications ranging from public events and festivals to corporate branding and advertising.
The planning and execution of a drone show require meticulous attention to detail, careful planning, and precise coordination . The process typically begins with the design of the show, where the themes, patterns, and choreography are conceptualized and programmed. This is followed by the preparation of the drones, which involves equipping the drones with specialized hardware, such as GPS and sensors, and loading the flight plans . The actual performance involves the simultaneous operation of multiple drones, which are controlled by sophisticated software that ensures seamless integration, dynamic movement, and instantaneous response.
Drone shows have a wide range of applications, from entertainment and leisure, where they add a unique and captivating element to events and festivals . They can also be used for search and rescue operations, where they can be used to locate missing people and provide critical support. Furthermore, drone shows can be integrated with other forms of entertainment, such as music and dance, to create a multisensory experience . The versatility and creativity of drone shows have made them an attractive option for event planners, who are looking for innovative and memorable ways to engage their audiences .
The use of drone shows for entertainment purposes has revolutionized the way we experience live events, providing a new and exciting form of entertainment . Drone shows can be used to create immersive and interactive experiences, such as drone racing and virtual reality. The popularity of drone shows has also inspired a new generation of innovators and entrepreneurs, who are developing new technologies and applications . As the technology continues to evolve, we can expect to see increased adoption of drone shows, as they become more accessible and affordable.
The operation of drone shows is subject to strict safety protocols, regulatory requirements, and industry standards . The safety of the audience, performers, and bystanders is of utmost importance, and emergency response plans are in place to respond to any incidents or accidents. The regulatory framework for drone shows is improving, with greater clarity and consistency in regulatory frameworks. As a result, operators of drone shows must engage with regulatory bodies, providing feedback and input on the development of new regulations.
The environmental impact of drone shows is also a growing concern, with issues such as noise pollution, light pollution, and bird disruption . The use of drones for entertainment purposes has highlighted the need for sustainable and responsible practices in the entertainment industry . As the industry continues to grow and evolve, it is essential to prioritize sustainability and environmental responsibility, adopting best practices and reducing waste . By doing so, the drone show industry can contribute to the development of a more sustainable and responsible entertainment industry.
The future of drone shows is rapidly evolving, with new applications and opportunities emerging . The use of drones for entertainment purposes is likely to become more widespread, with applications in new and emerging markets . The development of new technologies, such as 5G networks, edge computing, and cloud computing, will create new opportunities for innovation and entrepreneurship, driving growth and investment . As the industry continues to evolve, we can expect to see increased adoption of drone shows, as they become more accessible and affordable. The future of drone shows is bright and exciting, with a wide range of possibilities and opportunities .
рейтинг автосервисов в Москве по ремонту двигателей легковых авто http://www.dzen.ru/a/aO5JcSrFuEYaWtpN .
Guzellik s?rlar?n? ve trendlerin ard?ndaki detaylar? kesfetmeye haz?r olun.
“Zarafetin Is?g?: Moda ve Kulturun Bulusmas?” konusuyla ilgili olarak harika bir makale var.
Kendiniz bak?n:
https://stilvezarafet.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
Ich bin suchtig nach Trickz Casino, es ist ein Online-Casino, das wie ein Zauberstab funkelt. Die Spielauswahl im Casino ist wie ein Zauberkoffer voller Wunder, inklusive stilvoller Casino-Tischspiele. Das Casino-Team bietet Unterstutzung, die wie ein Zauberspruch wirkt, ist per Chat oder E-Mail erreichbar. Casino-Transaktionen sind simpel wie ein magischer Spruch, trotzdem wurde ich mir mehr Casino-Promos wunschen, die wie Zaubertranke wirken. Zusammengefasst ist Trickz Casino eine Casino-Erfahrung, die wie ein Zaubertrick glanzt fur Zauberer im Casino! Zusatzlich die Casino-Plattform hat einen Look, der wie ein magischer Zirkus leuchtet, was jede Casino-Session noch verzauberter macht.
trickz casino erfahrungen|
This is very interesting, You are a very skilled blogger. I’ve joined your feed and look forward to seeking more of your fantastic post. Also, I have shared your site in my social networks!
https://staffinggoals.com/
Ich finde absolut irre Lapalingo Casino, es bietet ein Casino-Abenteuer, das wie ein Regenbogen funkelt. Die Auswahl im Casino ist ein echtes Spektakel, mit modernen Casino-Slots, die einen in ihren Bann ziehen. Das Casino-Team bietet Unterstutzung, die wie ein Stern strahlt, mit Hilfe, die wie ein Funke spruht. Casino-Zahlungen sind sicher und reibungslos, manchmal wurde ich mir mehr Casino-Promos wunschen, die explodieren. Alles in allem ist Lapalingo Casino ein Casino, das man nicht verpassen darf fur Fans moderner Casino-Slots! Nebenbei die Casino-Navigation ist kinderleicht wie ein Windhauch, einen Hauch von Zauber ins Casino bringt.
lapalingo goldenes ei|
If you are looking for reliable and convenient stamp creator online free, then you should pay attention to the opportunity to order the production of stamps from an online store that specializes in creating high-quality rubber stamps according to individual designs.
The online rubber stamp maker is a game-changer for businesses and individuals who need to create custom stamps quickly . The process of creating a custom stamp is straightforward and user-friendly users can customize their stamp with various fonts, colors, and designs. The online rubber stamp maker offers a range of benefits, including convenience, speed, and affordability .
The rubber stamp maker online is a popular choice among businesses and individuals who need to create custom stamps . users can order custom stamps in bulk or individually. the rubber stamp maker online uses high-quality materials and state-of-the-art technology .
the rubber stamp maker online is a cost-effective solution for those who need to create custom stamps. users can select from a range of fonts, colors, and designs to customize their stamp . the online rubber stamp maker offers fast and reliable shipping .
the rubber stamp maker online is a popular choice among artists, crafters, and small business owners. the online rubber stamp maker has a user-friendly interface and easy-to-follow instructions . The online rubber stamp maker is a cost-effective solution for businesses and individuals who need to create custom stamps .
To use the rubber stamp maker online, users simply need to visit the website and follow the instructions . First, users need to select the desired stamp size and material . the rubber stamp maker online offers a range of benefits, including convenience, speed, and affordability.
The rubber stamp maker online is a secure and trustworthy platform . users can design custom stamps with various shapes, sizes, and colors . the rubber stamp maker online is a versatile tool that can be used to create a variety of custom stamps .
the rubber stamp maker online offers a range of benefits, including convenience, speed, and affordability. the rubber stamp maker online offers excellent customer service and support . We highly recommend the rubber stamp maker online to anyone who needs to create custom stamps .
The rubber stamp maker online is a versatile tool that can be used to create a variety of custom stamps . the rubber stamp maker online is a secure and trustworthy platform . the rubber stamp maker online is a cost-effective solution for businesses and individuals.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
Ev Dekorasyonu ve Tasar?m Ipuclar? hakk?ndaki bolum ozellikle hosuma gitti.
Iste, linki paylas?yorum:
https://anadolustil.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
I know this web page presents quality based content and other data, is there any other website which
gives these kinds of data in quality?
asteroid-insurance – Clever concept, design feels futuristic and sharp with humor.
adirondackfiddlers – Full of tradition, music passion shines through each element.
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
Guzellik ve kozmetik konusunda en guncel ipuclar? ve trendler burada!
Yeri gelmisken, eger Ev Dekorasyonu ve Tasar?m Ipuclar? ile ilgileniyorsan?z, buraya bir bak?n.
Asag?daki linke bakabilirsiniz:
https://anadolustil.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
Желаете проверить, на каком именно ресурсе наиболее удобно и выгодно смотреть фильмы онлайн? Попробуйте КИНОГО (https://games-igry.biz/). Я уверен на все сто, что это именно то, что вы искали. Испытано временем: весь контент и функционал на Kinogo полностью бесплатен, качество трансляции и контента – на высочайшем уровне, и отсутствует необходимость в регистрации. Лучшие фильмы и сериалы 2025 года доступны в каталоге!
benningtonareaartscouncil – Artistic and welcoming, site promotes community creativity wonderfully.
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
Bu arada, eger Mutfakta Yenilikci Deneyimler ve Lezzetli Yolculuklar ile ilgileniyorsan?z, buraya bir bak?n.
Iste, linki paylas?yorum:
https://mutfakkeyfi.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
homecovidtest – Informative and reliable, design prioritizes health clarity and accessibility.
топ 10 сео компаний топ 10 сео компаний .
Thanks for sharing your info. I really appreciate your efforts and I am waiting for your next write ups thank you once again.
https://staffinggoals.com
charitiespt – Compassionate and community-driven, mission comes across with sincerity.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
fayettecountydrt – Purposeful and informative, organization’s vision feels transparent and clear.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
Hi to every one, it’s in fact a good for me to go to see this site, it consists of priceless Information.
easystaffingmd.com
larkfest2013 – Vibrant and nostalgic, visuals radiate energy and celebration.
Yeniliklere ac?k ve her daim cekici gorunmek isteyenler icin tuyolar.
Yeri gelmisken, eger Fonksiyon ve Estetik: Mobilya ve Dekorasyon Onerileri ile ilgileniyorsan?z, buraya bir bak?n.
Iste, linki paylas?yorum:
https://dogalyasammobilya.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
Ankara Seramik Kaplama
holyspiritschooleg – Educational yet warm, design and content reflect care and faith.
Guzellik ve kozmetik konusunda en guncel ipuclar? ve trendler burada!
“Renkli Mutfak Tarifleri ve Beslenme Ipuclar?” konusuyla ilgili olarak harika bir makale var.
Kendiniz bak?n:
https://evtarifim.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
georgewillwashpost – Clean layout, solid typography, content radiates intellect and authority.
найти это чемпион зеркало
kraken onion
kraken android
кликните сюда champion slots
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
пояснения champion casino
mayceformayor – Campaign feels strong and grounded, visuals emphasize trust and service.
lcbclosure – Focused and informative, the message feels urgent and clearly communicated.
этот контент champion casino
masonchallengeradaptivefields – Inspirational cause, presentation is heartfelt and full of purpose.
Компания специализируется на производство уличной мебели россия, предлагая высококачественные уличные изделия для различных ландшафтов.
В производстве садовой мебели используются разные материалы, такие как дерево, металл и пластик, для создания мебели, которая будет долговечной и привлекательной.
Технологии производства садовой мебели постоянно совершенствуются, предлагая новые и инновационные решения.
Дизайн садовой мебели играет важную роль в создании уникального и комфортного пространства.
Инновационные технологии и материалы будут играть ключевую роль в развитии производства садовой мебели в будущем.
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
Bu arada, eger Fonksiyon ve Estetik: Mobilya ve Dekorasyon Onerileri ile ilgileniyorsan?z, buraya goz at?n.
Burada okuyabilirsiniz:
https://dogalyasammobilya.com
Trendlere ayak uydurun ve cevrenizde fark yarat?n.
milestonerest – Inviting visuals, design creates a sense of comfort and good taste.
If you don’t mind, where do you host your weblog? I am looking for a very good web host and your webpage seams to be extremely fast and up most the time…
Je trouve absolument brulant VBet Casino, ca pulse avec une energie de casino digne d’un cratere. Les options de jeu au casino sont riches et enflammees, offrant des sessions de casino en direct qui crepitent comme des flammes. Le service client du casino est une torche d’efficacite, joignable par chat ou email. Les gains du casino arrivent a une vitesse eruptive, par moments plus de tours gratuits au casino ce serait volcanique. Au final, VBet Casino est une pepite pour les fans de casino pour ceux qui cherchent l’adrenaline enflammee du casino ! En plus la plateforme du casino brille par son style volcanique, ajoute une touche de feu au casino.
vbet casino sister sites|
Ich flippe aus bei DrueGlueck Casino, es hat eine durchgeknallte Casino-Energie. Der Katalog des Casinos ist der Wahnsinn, mit Live-Casino-Sessions, die krachen. Die Casino-Mitarbeiter sind blitzschnell und top, antwortet in Sekundenschnelle. Casino-Gewinne kommen wie der Blitz, manchmal mehr Casino-Belohnungen waren der Hit. Alles in allem ist DrueGlueck Casino ein Casino, das man nicht verpassen darf fur Fans von Online-Casinos! Zusatzlich die Casino-Plattform hat einen krassen Look, was jede Casino-Session noch krasser macht.
casino drueckglueck|
Ich bin fasziniert von SpinBetter Casino, es fuhlt sich an wie ein Strudel aus Freude. Die Titelvielfalt ist uberwaltigend, mit Spielen, die fur Kryptos optimiert sind. Die Hilfe ist effizient und pro, verfugbar rund um die Uhr. Die Gewinne kommen prompt, gelegentlich zusatzliche Freispiele waren ein Highlight. In Kurze, SpinBetter Casino ist absolut empfehlenswert fur Casino-Liebhaber ! Daruber hinaus das Design ist ansprechend und nutzerfreundlich, gibt den Anreiz, langer zu bleiben. Ein Pluspunkt ist die schnellen Einzahlungen, die Vertrauen schaffen.
spinbettercasino.de|
Galera, nao podia deixar de comentar sobre o Bingoemcasa porque me ganhou de verdade. O site tem um visual descontraido que lembra um encontro descontraido. As salas de bingo sao super animadas, e ainda testei blackjack e poker tambem, todos rodaram sem travar. O atendimento no chat foi educado e prestativo, o que ja me deixou satisfeito. As retiradas foram eficientes de verdade, inclusive testei cripto e foi impecavel. Se pudesse apontar algo, diria que faltam mais promocoes, mas nada que estrague a experiencia. No geral, o Bingoemcasa me conquistou. Eu mesmo ja voltei varias vezes
bingoemcasa|
peoplesprotectiveequipment – Practical and safety-focused, design feels direct and trustworthy.
взгляните на сайте здесь champion slots
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
Bu arada, eger En Populer Yemek ve Diyet Ipuclar? ile ilgileniyorsan?z, buraya bir bak?n.
Iste, linki paylas?yorum:
https://ascieli.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
DRINKIO приятно удивил вниманием к клиентам. Служба поддержки ответила быстро, курьер приехал точно по времени. Всё в целости и сохранности. Буду пользоваться и дальше, таких сервисов мало: https://drinkio105.ru/
в этом разделе champion casino
letthemplaymn – Passionate and purposeful, the site speaks strongly for youth engagement.
читать champion casino
teamtadros – The mission feels bold, visuals highlight unity and determination.
Tenho uma paixao intensa por BETesporte Casino, proporciona uma aventura competitiva. O catalogo e rico e diversificado, com sessoes ao vivo imersivas. 100% ate R$600 + apostas gratis. O acompanhamento e impecavel, oferecendo respostas claras. As transacoes sao confiaveis, no entanto promocoes mais frequentes seriam um plus. No geral, BETesporte Casino e indispensavel para apostadores para quem usa cripto para jogar ! Tambem a plataforma e visualmente impactante, instiga a prolongar o jogo. Notavel tambem os pagamentos seguros em cripto, oferece recompensas continuas.
Encontrar os detalhes|
exodusalliance – Empowering theme, site feels hopeful and mission-driven throughout.
oscarthegaydog – Whimsical and delightful, brand personality shines through humor and charm.
Je suis fou de VBet Casino, ca degage une ambiance de jeu aussi ardente qu’une coulee de lave. Le repertoire du casino est un magma de divertissement, incluant des jeux de table de casino d’une elegance ardente. Le support du casino est disponible 24/7, repondant en un eclair brulant. Les paiements du casino sont securises et fluides, par moments les offres du casino pourraient etre plus genereuses. En somme, VBet Casino c’est un casino a explorer sans tarder pour les amoureux des slots modernes de casino ! Par ailleurs le site du casino est une merveille graphique ardente, ce qui rend chaque session de casino encore plus enflammee.
telechargement vbet|
Ich flippe aus bei DrueGlueck Casino, es ist ein Casino, das richtig abgeht. Es gibt eine Flut an abwechslungsreichen Casino-Titeln, mit modernen Casino-Slots, die fesseln. Der Casino-Kundenservice ist der Hammer, ist per Chat oder E-Mail erreichbar. Auszahlungen im Casino sind blitzschnell, dennoch wurde ich mir mehr Casino-Promos wunschen. Zusammengefasst ist DrueGlueck Casino ein Casino, das man nicht verpassen darf fur die, die mit Stil im Casino wetten! Ubrigens die Casino-Seite ist ein grafisches Meisterwerk, Lust macht, immer wieder ins Casino zuruckzukehren.
drueckglueck no deposit bonus|
Ich bin fasziniert von SpinBetter Casino, es ist eine Erfahrung, die wie ein Wirbelsturm pulsiert. Der Katalog ist reichhaltig und variiert, mit aufregenden Sportwetten. Der Support ist 24/7 erreichbar, garantiert top Hilfe. Die Gewinne kommen prompt, obwohl regelma?igere Aktionen waren toll. Zum Ende, SpinBetter Casino bietet unvergessliche Momente fur Adrenalin-Sucher ! Zusatzlich die Navigation ist kinderleicht, verstarkt die Immersion. Hervorzuheben ist die Vielfalt an Zahlungsmethoden, die den Spa? verlangern.
https://spinbettercasino.de/|
Galera, resolvi compartilhar minha experiencia sobre o Bingoemcasa porque achei muito alem do que esperava. O site tem um clima acolhedor que lembra um bate-papo animado. As salas de bingo sao sempre lotadas, e ainda testei alguns caca-niqueis modernos, todos vieram com graficos bonitos. O atendimento no chat foi respondeu em segundos, o que ja me deixou satisfeito. As retiradas foram mais velozes que imaginei, inclusive testei cripto e super tranquilo. Se pudesse apontar algo, diria que faltam mais promocoes, mas nada que estrague a experiencia. Na minha visao, o Bingoemcasa vale demais a pena. Eu mesmo ja voltei varias vezes
bingoemcasa net|
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
Ask ve Tutku ile Mutfak Tarifleri Kesfi hakk?ndaki yaz? dikkate degerdi.
Asag?daki linke bakabilirsiniz:
https://yemekruhu.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
daybirdsyr – Energetic vibe, visuals and tone reflect creativity and modern living.
supportsros – Compassionate tone, clear visuals support their advocacy with sincerity.
For newest news you have to pay a quick visit web and on internet I found this website as a best web page for most up-to-date updates.
https://easystaffingmd.com/
Spot on with this write-up, I truly believe this website requirements a lot much more consideration. I’ll probably be once more to read much much more, thanks for that info.
Gelecegin cilt bak?m? ve makyaj trendlerinin izinde olal?m!
“Fonksiyon ve Estetik: Mobilya ve Dekorasyon Onerileri” konusuyla ilgili olarak oras? tam bir bilgi hazinesi.
Burada okuyabilirsiniz:
https://dogalyasammobilya.com
Kendinize en uygun guzellik rehberini bulun ve yeni baslang?clar yap?n.
justinhicksformissouri – Strong campaign message, design feels authentic and community-focused.
Ich bin vollig hingerissen von Lowen Play Casino, es fuhlt sich an wie ein machtiger Sprung ins Spielvergnugen. Die Auswahl im Casino ist ein echtes Raubtier, inklusive stilvoller Casino-Tischspiele. Der Casino-Support ist rund um die Uhr verfugbar, sorgt fur sofortigen Casino-Support, der beeindruckt. Casino-Zahlungen sind sicher und reibungslos, trotzdem mehr Casino-Belohnungen waren ein koniglicher Gewinn. Zusammengefasst ist Lowen Play Casino ein Casino, das man nicht verpassen darf fur Fans von Online-Casinos! Und au?erdem die Casino-Plattform hat einen Look, der wie eine Savanne funkelt, was jede Casino-Session noch wilder macht.
löwen play landsberger straße münchen|
Ich bin komplett hin und weg von SpinBetter Casino, es bietet einen einzigartigen Kick. Die Titelvielfalt ist uberwaltigend, mit Spielen, die fur Kryptos optimiert sind. Der Kundenservice ist ausgezeichnet, bietet klare Losungen. Die Gewinne kommen prompt, trotzdem die Offers konnten gro?zugiger ausfallen. In Kurze, SpinBetter Casino garantiert hochsten Spa? fur Adrenalin-Sucher ! Nicht zu vergessen die Navigation ist kinderleicht, verstarkt die Immersion. Ein Pluspunkt ist die schnellen Einzahlungen, die den Spa? verlangern.
https://spinbettercasino.de/|
Estou completamente encantado por PlayPIX Casino, e uma plataforma que pulsa com energia festiva. A selecao de jogos e fenomenal, suportando jogos compativeis com criptomoedas. 100% ate €500 + 200 rodadas gratis. Os agentes respondem com rapidez, acessivel a qualquer hora. Os pagamentos sao seguros e fluidos, no entanto recompensas adicionais seriam festivas. Em resumo, PlayPIX Casino e indispensavel para jogadores para amantes de emocoes intensas ! Tambem a navegacao e simples e envolvente, instiga a prolongar a experiencia. Muito atrativo os eventos comunitarios envolventes, oferece recompensas continuas.
Descobrir agora mesmo|
tinacurrin – Artistic and bold, site radiates passion and expressive creativity.
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
harryandeddies – Cozy restaurant vibe, visuals and menu presentation feel deliciously inviting.
Технологии объединяют весь мир kraken онион тор kraken darknet market kraken darknet ссылка сайт kraken darknet
southbyfreenoms – Fun, quirky branding with energetic layout and friendly design.
Присоединяйтесь к клубу любителей кино на проверенном портале КИНОГО (https://vseigru-net.biz/). Здесь доступна огромная коллекция, где можно смотреть фильмы и сериалы 2025 года бесплатно, в хорошем качестве HD и без регистрации. На Kinogo вас ждут не просто свежие релизы, но и золотая классика кино. Ресурс один из самых популярных медиа-порталов для ценителей сериалов.
Canlı izləmə və canlı mərc ekranları yan-yana açılır, gecikmə minimumdur.
Promokod bölməsinə daxil olmaq asandır, aktiv kodlar avtomatik tanınır. Daim eyni ünvanı yoxlayın: http://www.pinco-casino-azerbaijan.biz.ua/; pinco azerbaycan yukle və kampaniyalar yalnız burada etibarlıdır. AZN balansı aydın görünür, tranzaksiya tarixi filtrə ilə rahat axtarılır. Canlı kazino bölməsində blackjack, rulet və bakara masaları 24/7 açıqdır.
Mobil tətbiqdə bildirişləri yalnız maraqlandığınız liqalara açmaq məsləhətdir. Aşağı internet sürətində də yüngül rejim avtomatik aktivləşir.
Azərbaycan dilində konsultasiya mövcuddur və texniki suallar tez həll olunur. Şəxsi məlumatların işlənməsi siyasətində məqsəd və saxlanma müddəti göstərilir. Reytinqlər və istifadəçi rəyləri ən faydalı bölmələri tapmağa imkan verir.
electamandamurphy – Inspiring campaign, message of progress and empathy shines through.
Для обеспечения высокого уровня подготовки и комфорта посетителей фитнес-центров используются профессиональные тренажеры для фитнес клубов, которые предназначены для развития силы, выносливости и гибкости, удовлетворяя различным потребностям и предпочтениям клиентов.
являются обязательным атрибутом современного фитнес-пространства . Они предназначены для обеспечения эффективных тренировок . Профессиональные тренажеры позволяют?? комплексные тренировки .
Профессиональные тренажеры имеют прочную конструкцию . Они имеют встроенные компьютеры для отслеживания прогресса . Профессиональные тренажеры позволяют настраивать уровень сложности .
Профессиональные тренажеры различаются по уровнюcomplexности. Силовые тренажеры являются обязательными в любом фитнес-клубе. Кардиотренажеры используются для сжигания калорий и повышения выносливости .
Функциональные тренажеры позволяют тренировать несколько групп мышц одновременно . Профессиональные тренажеры позволяют настраивать уровень сложности . Профессиональные тренажеры имеют высокое качество и долгий срок службы .
Профессиональные тренажеры являются обязательным атрибутом современного фитнес-пространства . Они позволяют настраивать уровень сложности . Профессиональные тренажеры обеспечивают эффективные тренировки .
Профессиональные тренажеры позволяют тренировать несколько групп мышц одновременно . Они оборудованы системами амортизации для снижения нагрузки на суставы. Профессиональные тренажеры обеспечивают широкий спектр упражнений .
Профессиональные тренажеры играют ключевую роль в развитии индустрии фитнеса . Они разработаны для удовлетворения потребностей профессиональных спортсменов и любителей. Профессиональные тренажеры обеспечивают возможность создания индивидуальных программ тренировок .
Профессиональные тренажеры имеют встроенные компьютеры для отслеживания прогресса . Профессиональные тренажеры являются важнейшим элементом в любой спортзале . Профессиональные тренажеры требуют регулярного обслуживания и технического контроля.
Website – https://lostfiilmtv.ru/
1 x bet 1 x bet .
kim4commonsense – The campaign feels approachable, visuals and tone are relatable.
J’ai une passion devorante pour Monte Cryptos Casino, il propose une odyssee chiffree. La variete des titres est eclatante, offrant des sessions en direct immersives. Avec des depots crypto rapides. Le support client est irreprochable, avec une aide rapide et fiable. Les retraits sont rapides comme une transaction, mais des offres plus genereuses ajouteraient du charme. Au final, Monte Cryptos Casino vaut une exploration virtuelle pour les amateurs de casino en ligne ! Par ailleurs la navigation est simple comme un wallet, ajoute une touche de sophistication. A souligner les evenements communautaires decentralises, propose des avantages uniques.
DГ©couvrir le site complet|
J’ai une affection pour Impressario Casino, il procure une experience exquise. Il y a une abondance de jeux captivants, proposant des jeux de table raffines. 100% jusqu’a 500 € + tours gratuits. Le service est disponible 24/7, joignable a toute heure. Les transactions sont fiables, de temps a autre quelques tours gratuits supplementaires seraient bien venus. En resume, Impressario Casino vaut une visite sophistiquee pour les amateurs de sensations elegantes ! A noter la navigation est simple et gracieuse, donne envie de prolonger l’experience. Particulierement interessant le programme VIP avec niveaux exclusifs, qui booste l’engagement.
En savoir davantage|
Je suis epoustoufle par Monte Cryptos Casino, on ressent une energie blockchain. Le repertoire est riche et varie, incluant des paris en direct dynamiques. Amplifiant l’experience de jeu. Le support client est irreprochable, offrant des reponses claires. Les gains arrivent sans delai, cependant des recompenses supplementaires seraient top. Dans l’ensemble, Monte Cryptos Casino est incontournable pour les fans de crypto pour les joueurs en quete d’innovation ! En bonus le design est elegant et intuitif, facilite une immersion totale. Un atout cle les paiements securises en crypto, garantit des transactions fiables.
Ouvrir le site|
Je suis seduit par Impressario Casino, c’est une plateforme qui evoque le raffinement. La variete des titres est raffinee, avec des slots aux designs elegants. Avec des depots instantanes. L’assistance est efficace et professionnelle, avec une aide precise. Les paiements sont securises et rapides, neanmoins quelques tours gratuits supplementaires seraient bienvenus. Au final, Impressario Casino garantit un plaisir constant pour les passionnes de jeux modernes ! De plus la plateforme est visuellement somptueuse, ce qui rend chaque session plus raffinee. Un plus le programme VIP avec niveaux exclusifs, assure des transactions fiables.
Voir la liste complГЁte|
Yeni başlayanlar üçün kupon düzəltmə bələdçisi aydın yazılıb, hər addımda yardım pəncərələri çıxır.
Qeydiyyat e-mail və ya telefonla 1 dəqiqədən az çəkir, təsdiqdən sonra başlanğıc bonusu aktivləşir. Sevimli slotları mobil telefonda oynamaq üçün http://pinco-casino-azerbaijan.biz.ua/ keçidindən istifadə edin; pinco kazino kampaniyalarını da orada görəcəksiniz. AZN balansı aydın görünür, tranzaksiya tarixi filtrə ilə rahat axtarılır. Minimum və maksimum mərc diapazonları həm yeni başlayanlar, həm də high-rollerlər üçün uyğundur.
Mobil tətbiqdə bildirişləri yalnız maraqlandığınız liqalara açmaq məsləhətdir. Məlumat sərfiyyatını azaltmaq üçün axın keyfiyyətini ayarlardan endirmək olar.
Hesab bərpası SMS və ya e-poçt vasitəsilə aparılır. Region qaydalarına uyğun lokal variantlar və hüquqi məlumat verilir. Sürətli ödəniş axını və şəffaf limitlər rahat təcrübə yaradır.
rideformissingchildren – Heartfelt cause, presentation honors the mission beautifully and respectfully.
J’adore l’atmosphere aquatique de BassBet Casino, on ressent une ambiance de riviere. Il y a une profusion de jeux excitants, proposant des jeux de table elegants. Le bonus de bienvenue est rapide. Les agents repondent comme un courant, garantissant un support de qualite. Les transactions sont fiables, cependant des offres plus genereuses seraient dynamiques. En resume, BassBet Casino garantit un plaisir constant pour les passionnes de jeux modernes ! Ajoutons que la navigation est simple et rapide, donne envie de prolonger l’aventure. Egalement appreciable les tournois reguliers pour la competition, renforce le sentiment de communaute.
https://bassbetcasinobonus777fr.com/|
Je suis accro a Spinit Casino, on ressent une ambiance de livre. Le catalogue est riche et varie, incluant des paris sportifs dynamiques. Renforcant votre capital initial. L’assistance est efficace et professionnelle, avec une aide precise. Les transactions sont fiables, cependant des recompenses additionnelles seraient narratives. Pour conclure, Spinit Casino est une plateforme qui enchante pour les amateurs de sensations enchantees ! A noter la plateforme est visuellement envoutante, amplifie le plaisir de jouer. A souligner les evenements communautaires engageants, renforce le sentiment de communaute.
https://spinitcasinologinfr.com/|
Je suis captive par Olympe Casino, il procure une experience legendaire. Il y a une profusion de jeux captivants, proposant des jeux de table glorieux. Le bonus de bienvenue est divin. Le service est disponible 24/7, offrant des reponses claires. Le processus est simple et glorieux, parfois des bonus plus varies seraient un nectar. Pour conclure, Olympe Casino est un incontournable pour les joueurs pour les fans de casino en ligne ! De plus la navigation est simple comme un oracle, ajoute une touche de mythologie. Un atout olympien les tournois reguliers pour la competition, assure des transactions fiables.
olympefr.com|
Prisma Games offers thrilling, immersive games with innovative mechanics and vibrant visuals. A go-to platform for Canadian gamers seeking excitement and high-quality gameplay: Prisma Games company info
Kuponda multi-bet, sistem və tez düzəliş funksiyaları var, səhv əmsal da avtomatik düzəlir.
Kupon redaktəsi və cash-out imkanı mərcin riskini idarə etməyə kömək edir. Daim eyni ünvanı yoxlayın: http://www.pinco-casino-azerbaijan.biz.ua/; pinco azerbaycan yukle və kampaniyalar yalnız burada etibarlıdır. Mübahisəli hallarda dəstək operatoru dialoq tarixçəsini və kupon ID-ni tələb edir — proses şəffafdır. Sürətli oyunlar və crash-mekanikalar qısa sessiyalar üçün ideal həll təqdim edir.
Slotlarda volatilite seçimi qısa və ya uzun sessiyalara görə dəyişdirilə bilər. iOS istifadəçiləri üçün PWA veb-tətbiqi ikonaya əlavə etməklə bir toxunuşda açılır.
E-poçt dəstəyi müraciət nömrəsi ilə gəlir və izləmək rahatdır. Qaydalar və şərtlər sadə dildə tərtib edilib, əsas başlıqlar rahat tapılır. Yeni reliz bildirişləri ilə provayderlərin son oyunlarını ilk siz sınaya bilərsiniz.
t-walls-of-kuwait-iraq – Historical and impactful, visuals convey memory and meaning strongly.
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
cranberrystreetcafe – Cozy and charming, design evokes warmth and delicious experiences.
You always manage to put complex feelings into simple, beautiful words.
Kuponda multi-bet, sistem və tez düzəliş funksiyaları var, səhv əmsal da avtomatik düzəlir.
Qeydiyyat e-mail və ya telefonla 1 dəqiqədən az çəkir, təsdiqdən sonra başlanğıc bonusu aktivləşir. Yeni başlayanlar qeydiyyatdan sonra pinco casino az təkliflərini yoxlaya və demo rejimdə oyunlarla tanış ola bilər. Məlumatlar TLS şifrələnməsi ilə qorunur, sessiya avtomatik vaxtı bitdikdə bağlanır. Minimum və maksimum mərc diapazonları həm yeni başlayanlar, həm də high-rollerlər üçün uyğundur.
Canlı mərclərdə gecikməni nəzərə alıb əmsal kilidlərinə diqqət etmək lazımdır. APK yenilənməsi tətbiqdaxili xəbərdarlıqla gəlir və bir dəqiqəyə tamamlanır.
Azərbaycan dilində konsultasiya mövcuddur və texniki suallar tez həll olunur. Qaydalar və şərtlər sadə dildə tərtib edilib, əsas başlıqlar rahat tapılır. Kampaniya təqvimi bonusları planlaşdırmağa və maksimum fayda götürməyə imkan verir.
Website https://useit2.ru/.
На правах опытного киномана я настоятельно рекомендую КИНОГО (https://igru-net.biz/) в качестве лучшего места для того, чтобы смотреть фильмы. Этот проверенный временем ресурс – гарантия качественного контента. Лично мне импонирует, что премьерные показы 2025 года на Kinogo можно смотреть максимально оперативно, при этом бесплатно, в хорошем качестве и минуя этап регистрации.
georgetowndowntownmasterplan – Informative and civic-minded, content clearly explains planning goals.
Recently the company drone shows put on an amazing performance that amazed all the spectators.
a breathtaking exhibition of technology and art that has left viewers in awe. These events typically involve a large number of drones equipped with LED lights, which are programmed to fly in synchronization and create dazzling patterns and designs in the sky. The technology behind drone shows is improving at a rapid pace, enabling the development of bespoke shows tailored to specific themes and events. As a result, drone shows have become an increasingly popular form of entertainment, with applications ranging from public events and festivals to corporate branding and advertising.
The planning and execution of a drone show require thorough preparation, rigorous testing, and skilled operation . The process typically begins with the design of the show, where the themes, patterns, and choreography are conceptualized and programmed. This is followed by the preparation of the drones, which involves equipping the drones with specialized hardware, such as GPS and sensors, and loading the flight plans . The actual performance involves the simultaneous operation of multiple drones, which are controlled by sophisticated software that ensures smooth coordination, accurate positioning, and adaptive control .
Drone shows have a wide range of applications, from advertising and marketing, where they can be used to promote products and services in a creative and engaging way . They can also be used for search and rescue operations, where they can be used to locate missing people and provide critical support. Furthermore, drone shows can be integrated with other forms of entertainment, such as music and dance, to create a multisensory experience . The versatility and creativity of drone shows have made them an attractive option for marketers, who are seeking to create a lasting impression on their customers .
The use of drone shows for entertainment purposes has revolutionized the way we experience live events, providing a new and exciting form of entertainment . Drone shows can be used to create immersive and interactive experiences, such as drone racing and virtual reality. The popularity of drone shows has also driven the growth of the drone industry, with advancements in technology and regulatory frameworks. As the technology continues to evolve, we can expect to see increased adoption of drone shows, as they become more accessible and affordable.
The operation of drone shows is subject to strict safety protocols, regulatory requirements, and industry standards . The safety of the audience, performers, and bystanders is of utmost importance, and emergency response plans are in place to respond to any incidents or accidents. The regulatory framework for drone shows is continuously evolving, with updates to laws, regulations, and guidelines . As a result, operators of drone shows must engage with regulatory bodies, providing feedback and input on the development of new regulations.
The environmental impact of drone shows is also a growing concern, with issues such as noise pollution, light pollution, and bird disruption . The use of drones for entertainment purposes has highlighted the need for sustainable and responsible practices in the entertainment industry . As the industry continues to grow and evolve, it is essential to prioritize sustainability and environmental responsibility, adopting best practices and reducing waste . By doing so, the drone show industry can ensure a sustainable future, minimizing its impact on the environment .
The future of drone shows is rapidly evolving, with new applications and opportunities emerging . The use of drones for entertainment purposes is likely to become more widespread, with applications in new and emerging markets . The development of new technologies, such as artificial intelligence, machine learning, and the Internet of Things , will improve the overall experience of attendees, providing a more immersive and engaging experience. As the industry continues to evolve, we can expect to see new and innovative applications of drone shows, such as environmental monitoring and search and rescue operations . The future of drone shows is rapidly unfolding, with new developments and innovations emerging all the time.
hardman4schools – The site feels professional, message is clear and community-focused.
гаманець приватбанк
saveshelterpets – Touching initiative, site feels compassionate and community-focused.
Website – https://lostfiilmtv.ru/
I’ve been using shrooms cart constantly seeing that over a month at the moment, and I’m indeed impressed during the sure effects. They’ve helped me determine calmer, more balanced, and less anxious in every nook the day. My forty winks is deeper, I wake up refreshed, and sober my core has improved. The value is excellent, and I appreciate the natural ingredients. I’ll categorically preserve buying and recommending them to the whole world I know!
albanysuperducks – Fun and quirky, visuals bring playful excitement to life.
Kuponda multi-bet, sistem və tez düzəliş funksiyaları var, səhv əmsal da avtomatik düzəlir.
Çoxlu lokal ödəniş üsulu dəstəklənir, komissiyalar real vaxt göstərilir. Aktiv promosları qaçırmamaq üçün pinco bonus bölməsinə baxın, canlı izləmə zamanı əlavə fribetlər çıxır. Sürətli ödəniş üçün sevimli metodları saxlayıb bir kliklə istifadə etmək olur. Axtarış paneli ad, provayder və mexanika üzrə işləyir — nəticələr dərhal çıxır.
Yeni oyunçular üçün təlimat məqalələri sadə dildə yazılıb, ekran görüntüləri kömək edir. APK yenilənməsi tətbiqdaxili xəbərdarlıqla gəlir və bir dəqiqəyə tamamlanır.
Messencer kanallarına keçidlər rəsmi səhifədə yerləşir. Region qaydalarına uyğun lokal variantlar və hüquqi məlumat verilir. Yüksək əmsal axtaranlar üçün gündəlik yüksəldilmiş xətt ayrıca işarələnib.
stopkrasner – Strong political tone, site expresses clear intent and decisive messaging.
1 xbet 1 xbet .
1xbet mobil giri? http://www.1xbet-4.com .
tranquilleeyecream – Calm aesthetic, visuals match beauty and relaxation concept perfectly.
hardman4schools – I’m impressed by the message clarity and strong sense of community.
walkunchained – Inspiring tone, message of freedom and courage comes across clearly.
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
Приглашаем всех любителей кино на популярный портал КИНОГО (https://igry-onlayn.biz/). У нас вас ждет впечатляющая подборка, чтобы смотреть онлайн любимыми фильмами и сериалами 2025 года бесплатно, в отличном качестве 1080p и без регистрации. На Kinogo вас ждут не только премьеры, но и проверенная временем классика кино. Данный ресурс – один из топовых киносайтов для настоящих ценителей сериалов.
займ деньги мфо оформить займ через интернет
Je suis absolument captive par Monte Cryptos Casino, on ressent une energie decentralisee. Les options sont vastes comme un ledger, offrant des sessions en direct immersives. Le bonus d’entree est scintillant. Disponible 24/7 via chat ou email, avec une aide rapide et fiable. Le processus est fluide comme un smart contract, cependant plus de promos regulieres dynamiseraient l’experience. En resume, Monte Cryptos Casino est un must pour les fans de blockchain pour les adeptes de jeux modernes ! En bonus la plateforme est visuellement eblouissante, ce qui rend chaque session plus immersive. Particulierement captivant les paiements securises en BTC/ETH, offre des recompenses continues.
Explorer le site|
займ деньги сразу микрозайм без отказа и звонков
jammykspeaks – Powerful voice, content feels authentic, motivational and full of passion.
займы онлайн срочно онлайн займ без звонков и справок
J’adore l’elegance de Impressario Casino, il procure une experience exquise. Le catalogue est riche en saveurs, proposant des jeux de table raffines. 100% jusqu’a 500 € + tours gratuits. L’assistance est efficace et professionnelle, garantissant un support de qualite. Les gains arrivent sans delai, parfois plus de promos regulieres ajouteraient du piquant. Dans l’ensemble, Impressario Casino vaut une visite sophistiquee pour les joueurs en quete d’excitation ! Ajoutons que la plateforme est visuellement somptueuse, amplifie le plaisir de jouer. Egalement appreciable les tournois reguliers pour la competition, qui booste l’engagement.
Approfondir|
Je suis totalement ensorcele par Monte Cryptos Casino, on ressent une energie decentralisee. Le catalogue est riche et varie, incluant des paris live dynamiques. Le bonus d’accueil est eclatant. Les agents repondent comme une comete, joignable a tout moment. Les transferts sont fiables, de temps a autre des offres plus genereuses ajouteraient du charme. Au final, Monte Cryptos Casino offre une experience memorable pour les adeptes de jeux modernes ! Par ailleurs l’interface est fluide comme un flux de donnees, ajoute une touche de sophistication. Egalement cool les tournois reguliers pour la competition, garantit des transactions fiables.
Obtenir les bonus|
J’ai une passion ardente pour Monte Cryptos Casino, il offre une odyssee chiffree. Le choix de titres est eblouissant, comprenant des jeux optimises pour Bitcoin et Ethereum. 100% jusqu’a 300 € + tours gratuits. Le support client est irreprochable, joignable instantanement. Les retraits sont fulgurants, cependant plus de promos regulieres dynamiseraient l’experience. En bref, Monte Cryptos Casino est incontournable pour les fans de crypto pour les aficionados de jeux modernes ! A noter la navigation est simple comme un wallet, donne envie de prolonger l’aventure. Un atout cle le programme VIP avec des niveaux exclusifs, offre des recompenses continues.
Aller lГ -bas|
J’adore l’atmosphere aquatique de BassBet Casino, il procure une experience dynamique. La selection de jeux est dynamique, proposant des jeux de table elegants. Avec des depots instantanes. Les agents repondent comme un courant, offrant des reponses claires. Les paiements sont securises et rapides, bien que des recompenses additionnelles seraient fluviales. Au final, BassBet Casino est un incontournable pour les joueurs pour ceux qui aiment parier en crypto ! De plus l’interface est fluide comme un delta, facilite une immersion totale. Particulierement interessant le programme VIP avec des niveaux exclusifs, offre des recompenses continues.
https://bassbetcasinobonus777fr.com/|
Je suis accro a BassBet Casino, ca offre un plaisir musical unique. Le catalogue est riche et varie, incluant des paris sportifs dynamiques. Le bonus de bienvenue est rythme. L’assistance est efficace et professionnelle, avec une aide precise. Les retraits sont fluides comme un riff, neanmoins des offres plus genereuses seraient jazzy. Dans l’ensemble, BassBet Casino offre une experience memorable pour ceux qui aiment parier en crypto ! Par ailleurs l’interface est fluide comme un solo, facilite une immersion totale. Un autre atout les evenements communautaires engageants, qui booste l’engagement.
bassbetcasinologinfr.com|
Je suis emerveille par Spinit Casino, il procure une experience magique. Il y a une profusion de jeux fascinants, comprenant des jeux compatibles avec les cryptos. Amplifiant le plaisir de jeu. Le service est disponible 24/7, garantissant un support de qualite. Le processus est simple et elegant, parfois quelques tours gratuits supplementaires seraient bienvenus. En bref, Spinit Casino garantit un plaisir constant pour les amateurs de sensations enchantees ! A noter le design est moderne et enchante, amplifie le plaisir de jouer. A souligner les evenements communautaires engageants, offre des recompenses continues.
spinitcasinologinfr.com|
Je suis totalement enchante par Spinit Casino, il procure une experience magique. Il y a une profusion de jeux fascinants, comprenant des jeux compatibles avec les cryptos. Le bonus de bienvenue est magique. Le service est disponible 24/7, garantissant un support de qualite. Les gains arrivent sans delai, cependant des offres plus genereuses seraient enchanteresses. Au final, Spinit Casino garantit un plaisir constant pour les amateurs de sensations mystiques ! De plus la plateforme est visuellement envoutante, ce qui rend chaque session plus enchantee. Un autre atout les options de paris sportifs variees, assure des transactions fiables.
casinospinitfr.com|
embersk9wish – Heartwarming mission, site honors service dogs with love and gratitude.
Je suis captive par Olympe Casino, c’est une plateforme qui evoque l’Olympe. Le catalogue est riche en epopees, offrant des sessions live immortelles. 100% jusqu’a 500 € + tours gratuits. Le suivi est irreprochable, offrant des reponses claires. Les paiements sont securises et fluides, parfois quelques tours gratuits en plus seraient divins. Au final, Olympe Casino est un incontournable pour les joueurs pour les passionnes de jeux antiques ! Par ailleurs la plateforme est visuellement olympienne, facilite une immersion totale. Particulierement captivant les options de paris sportifs variees, renforce le sentiment de communaute.
https://olympefr.com/|
Je suis ensorcele par Monte Cryptos Casino, c’est une plateforme qui pulse comme un reseau blockchain. Le catalogue est opulent et divers, avec des slots aux designs modernes. Avec des depots crypto rapides. L’assistance est precise et professionnelle, joignable a tout moment. Les retraits sont rapides comme une transaction, cependant quelques tours gratuits en plus seraient bienvenus. Dans l’ensemble, Monte Cryptos Casino est une plateforme qui domine l’univers crypto pour les adeptes de jeux modernes ! Ajoutons que la navigation est simple comme un wallet, amplifie le plaisir de jouer. Egalement cool les tournois reguliers pour la competition, propose des avantages uniques.
Entrer sur le site|
J’ai une obsession pour Monte Cryptos Casino, ca distille un plaisir numerique intense. L’eventail de jeux est colossal, comprenant des jeux tailles pour les cryptos. Elevant l’experience de jeu. L’assistance est rapide et experte, avec une aide precise. Les paiements sont securises et fluides, mais quelques tours gratuits supplementaires seraient cool. En bref, Monte Cryptos Casino vaut une plongee numerique pour les joueurs en quete d’innovation ! En bonus la navigation est simple comme un wallet, amplifie le plaisir de jouer. Un avantage notable les paiements securises en BTC/ETH, renforce la communaute.
Trouver la vГ©ritГ©|
Je suis accro a BassBet Casino, il procure une experience rythmee. La selection de jeux est harmonieuse, proposant des jeux de table elegants. Le bonus de bienvenue est rythme. L’assistance est efficace et professionnelle, toujours pret a jammer. Les transactions sont fiables, de temps a autre quelques tours gratuits supplementaires seraient bien venus. Au final, BassBet Casino est une plateforme qui groove pour les amateurs de sensations blues ! Par ailleurs le design est moderne et blues, amplifie le plaisir de jouer. Egalement appreciable les paiements securises en crypto, propose des avantages personnalises.
bassbetcasinologinfr.com|
J’adore l’atmosphere dynamique de Spinit Casino, on ressent une ambiance de piste. Il y a une profusion de jeux excitants, offrant des sessions live immersives. Amplifiant le plaisir de jeu. Le support client est veloce, offrant des reponses claires. Les transactions sont fiables, bien que des recompenses additionnelles seraient rapides. Au final, Spinit Casino offre une experience memorable pour ceux qui aiment parier en crypto ! Ajoutons que le design est moderne et dynamique, ajoute une touche de vitesse. Particulierement interessant les tournois reguliers pour la competition, assure des transactions fiables.
spinitcasinologinfr.com|
Je suis accro a Spinit Casino, ca offre un plaisir veloce. Les options sont vastes comme une course, incluant des paris sportifs dynamiques. Renforcant votre capital initial. Le suivi est irreprochable, offrant des reponses claires. Le processus est simple et elegant, bien que plus de promos regulieres ajouteraient du rythme. En resume, Spinit Casino garantit un plaisir constant pour les passionnes de jeux modernes ! A noter le design est moderne et dynamique, amplifie le plaisir de jouer. Particulierement interessant le programme VIP avec des niveaux exclusifs, qui booste l’engagement.
casinospinitfr.com|
J’adore l’aura divine d’ Olympe Casino, c’est une plateforme qui evoque l’Olympe. La variete des titres est divine, offrant des sessions live immortelles. Avec des depots rapides. Les agents repondent comme des dieux, offrant des reponses claires. Les retraits sont rapides comme un eclair de Zeus, de temps a autre plus de promos regulieres ajouteraient de la gloire. Dans l’ensemble, Olympe Casino est un incontournable pour les joueurs pour les joueurs en quete d’epopee ! De plus l’interface est fluide comme un nectar, facilite une immersion totale. Un plus divin le programme VIP avec des niveaux exclusifs, renforce le sentiment de communaute.
olympefr.com|
createimpactonline – The eCommerce store setup was seamless and user-friendly.
partnershippowerhouse – A go-to resource for anyone looking to enhance their business alliances.
Веб сайт https://urkarl.ru/
займ на карту мгновенно сайт микрозаймов
займы онлайн на карту https://zaimy-69.ru
услуга займа https://zaimy-71.ru
срочные займы без истории все займы все займы
займ на карту https://zaimy-76.ru
займ онлайн без отказа все онлайн займы
купить диплом во владивостоке купить диплом во владивостоке .
займы организации быстрый займ без справок и залога
займ срочно без отказа микрозайм круглосуточно без выходных
займ срочно https://zaimy-82.ru
monumentremoval – The purpose is bold and the site feels deeply meaningful and timely.
заем денежных средств https://zaimy-87.ru
срочно онлайн займ отказа займы
взять займ без отказа срочные займы на карту круглосуточно
Узнать больше https://kra43at.at/
9 Lessons Your Parents Teach You About Automatic Vacuum Cleaners automatic vacuum
cleaner (Brewwiki.win)
веб-сайт https://kra43at.cc/
Website https://church-bench.ru/ .
Курируют процесс от начала до конца, что очень удобно https://svobroker.ru/
1091m2love – Unique name, design feels artistic and expression of individuality.
каталог https://kra43at.at
Таможенный брокер быстро оформил все документы и отправил отчёт: https://tamozhenniiy-predstavitel.ru/
nycbhm – Community-focused organization with meaningful outreach and engagement.
Для обеспечения высокого уровня подготовки и комфорта посетителей фитнес-центров используются тренажеры для фитнес зала купить, которые предназначены для развития силы, выносливости и гибкости, удовлетворяя различным потребностям и предпочтениям клиентов.
являются важнейшим элементом в любом спортзале . Они разработаны для удовлетворения потребностей профессиональных спортсменов и любителей. Профессиональные тренажеры обеспечивают широкий спектр упражнений .
Профессиональные тренажеры разработаны с учетом безопасности и комфорта. Они оснащены современными системами управления . Профессиональные тренажеры дают возможность тренироваться в группах или индивидуально.
Профессиональные тренажеры бывают различных типов и моделей . Силовые тренажеры являются обязательными в любом фитнес-клубе. Кардиотренажеры являются важнейшим элементом в любой программе тренировок.
Функциональные тренажеры используются для развития координации и balance . Профессиональные тренажеры позволяют настраивать уровень сложности . Профессиональные тренажеры изготовляются известными брендами .
Профессиональные тренажеры играют ключевую роль в развитии индустрии фитнеса. Они обеспечивают возможность создания индивидуальных программ тренировок . Профессиональные тренажеры позволяют достигать высоких результатов в спорте .
Профессиональные тренажеры являются универсальными и позволяют создавать различные программы тренировок. Они оснащены современными системами управления . Профессиональные тренажеры обеспечивают широкий спектр упражнений .
Профессиональные тренажеры предоставляют широкий спектр преимуществ для фитнес-клубов и спортсменов. Они позволяют достигать высоких результатов в спорте . Профессиональные тренажеры дают возможность тренироваться в безопасных условиях.
Профессиональные тренажеры оборудованы системами амортизации для снижения нагрузки на суставы. Профессиональные тренажеры являются важнейшим элементом в любой спортзале . Профессиональные тренажеры изготовляются известными брендами .
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
The 10 Most Scariest Things About Floor Robot floor Robot
keyword.
Сохраняйте рабочие адреса KRAKEN и проверяйте их перед входом.
nycbhm – Community-focused organization with meaningful outreach and engagement.
1day4kids – Uplifting cause, presentation radiates care and dedication toward children.
педагогический колледж купить диплом педагогический колледж купить диплом .
Официальное зеркало KRAKEN работает стабильно
> http kra45 сс
Актуально на сегодня.
knightstablefoodpantry – Compassionate food pantry serving the community with dedication.
займ без истории https://zaimy-91.ru
Скачать видео с YouTube https://www.fsaved.com онлайн: MP4/WEBM/3GP, качество 144p–4K, конвертация в MP3/M4A, поддержка Shorts и плейлистов, субтитры и обложки. Без регистрации, быстро и безопасно, на телефоне и ПК. Используйте только с разрешения правообладателя и в рамках правил YouTube.
visionaryfutureteam – Found a useful section on collaboration that I’ll try to apply with my team.
trustedpartnergroup – Would like to see more real-world stories or testimonials for added credibility.
ultimateprofitplan – The site looks hopeful; I found some interesting growth ideas to note.
dailyessentialstore – On mobile the browsing experience was smooth and checkout was hassle-free.
mcctheatercampaign – Supporting arts and theater with passion and community spirit.
trustbridgealliance – Would like to see real-world case studies or member success stories to increase credibility.
professionalgrowthhub – Found a promising tip today on leadership growth; will apply it this week.
1091m2love – Wow, didn’t expect such clarity and comfort browsing through each page.
shopandshine – The website layout is clean and browsing through categories was smooth.
creativefashionworld – Quality looks solid in photos, looking forward to seeing it in person.
mcalpineinfo – From first glance it seems like a new site or one that hasn’t been updated much.
saveshelterpets – I visited the site and it appears to support homeless pets, but I couldn’t find clear verification of their nonprofit status.
J’ai une passion ardente pour Monte Cryptos Casino, ca offre une sensation futuriste unique. Le catalogue est opulent et divers, incluant des paris live dynamiques. 100% jusqu’a 300 € + tours gratuits. L’assistance est precise et professionnelle, toujours pret a decoder. Le processus est fluide comme un smart contract, mais des offres plus genereuses ajouteraient du charme. En bref, Monte Cryptos Casino est un must pour les fans de blockchain pour les passionnes de sensations numeriques ! En bonus le site est rapide et futuriste, ce qui rend chaque session plus immersive. Un atout cle les evenements communautaires decentralises, offre des recompenses continues.
Visiter aujourd’hui|
Je suis enchante par Impressario Casino, ca offre un plaisir sophistique. Le catalogue est riche en saveurs, proposant des jeux de table raffines. 100% jusqu’a 500 € + tours gratuits. L’assistance est efficace et professionnelle, garantissant un support de qualite. Les paiements sont securises et rapides, parfois des offres plus genereuses seraient exquises. En resume, Impressario Casino vaut une visite sophistiquee pour les fans de casino en ligne ! A noter la plateforme est visuellement somptueuse, facilite une immersion totale. Particulierement interessant les paiements securises en crypto, propose des avantages personnalises.
Aller en ligne|
Je suis charme par Impressario Casino, ca transporte dans un monde gourmand. Le catalogue est riche en saveurs, avec des slots aux designs elegants. Renforcant votre capital initial. Le service est disponible 24/7, avec une aide precise. Les transactions sont fiables, cependant plus de promos regulieres ajouteraient du piquant. En resume, Impressario Casino garantit un plaisir constant pour ceux qui aiment parier en crypto ! De plus l’interface est fluide comme un banquet, ajoute une touche d’elegance. A souligner les tournois reguliers pour la competition, offre des recompenses continues.
Ouvrir ici|
The Best Automatic Vacuum Cleaner And Mop Tricks For Changing Your Life
best automatic vacuum cleaner
sichere kombiwetten
Feel free to visit my page … beste sportwetten seite
Je suis ebloui par Monte Cryptos Casino, c’est une plateforme qui pulse comme un n?ud blockchain. Le repertoire est opulent et divers, avec des slots aux designs innovants. 100% jusqu’a 300 € + tours gratuits. L’assistance est rapide et experte, toujours pret a decoder. Les paiements sont securises et fluides, mais plus de promos dynamiseraient l’aventure. Au final, Monte Cryptos Casino vaut une plongee numerique pour les adeptes de jeux modernes ! En bonus le site est rapide et futuriste, donne envie de prolonger l’experience. A souligner les tournois reguliers pour la competition, renforce la communaute.
https://casinomontecryptofr.com/|
Je suis bluffe par BassBet Casino, c’est une plateforme qui pulse comme un mix de DJ. Les options sont vastes comme une piste de danse, avec des slots aux designs lumineux. Avec des depots ultra-rapides. Les agents repondent comme un beat parfait, avec une aide precise. Les retraits sont fluides comme un drop, mais des bonus plus varies seraient un hit. En resume, BassBet Casino est une plateforme qui fait vibrer pour les amateurs de sensations fortes ! Ajoutons que la plateforme est visuellement electrisante, donne envie de prolonger la fete. A souligner le programme VIP avec des niveaux exclusifs, propose des avantages sur mesure.
https://bassbetcasinobonus777fr.com/|
Je suis emerveille par Spinit Casino, ca plonge dans un monde de vitesse. La variete des titres est rapide, comprenant des jeux compatibles avec les cryptos. Amplifiant le plaisir de jeu. Le suivi est irreprochable, joignable a toute heure. Les gains arrivent sans delai, de temps a autre des bonus plus varies seraient un sprint. Au final, Spinit Casino offre une experience memorable pour les joueurs en quete d’excitation ! Ajoutons que le design est moderne et dynamique, donne envie de prolonger l’aventure. Un plus les options de paris sportifs variees, offre des recompenses continues.
https://spinitcasinologinfr.com/|
pmajoe4council – Clear campaign focus, design feels trustworthy and community-oriented.
Je suis emerveille par Spinit Casino, ca offre un plaisir veloce. Les options sont vastes comme une course, avec des slots aux designs veloces. Amplifiant le plaisir de jeu. Le suivi est irreprochable, garantissant un support de qualite. Les paiements sont securises et rapides, bien que quelques tours gratuits supplementaires seraient bien venus. Pour conclure, Spinit Casino est une plateforme qui accelere pour les amateurs de sensations rapides ! De plus la navigation est simple et rapide, amplifie le plaisir de jouer. A souligner les tournois reguliers pour la competition, propose des avantages personnalises.
https://casinospinitfr.com/|
updatingparents – The site feels thoughtful, user-friendly and clearly grounded in practical support.
I’ve been using https://www.nothingbuthemp.net/products/build-your-own-drinks-thc-tinctures ordinary on account of all about a month nowadays, and I’m truly impressed before the sure effects. They’ve helped me judge calmer, more balanced, and less tense from the beginning to the end of the day. My saw wood is deeper, I wake up refreshed, and uniform my core has improved. The quality is outstanding, and I appreciate the natural ingredients. I’ll categorically carry on buying and recommending them to person I recall!
Ищете альтернативу KRAKEN?
Вот ещё вариант: https://krakr.cc
Левандовскинин формасы дагы деле жогорку деңгээлде.
Левандовскинин жубайы жана үй-бүлөсү тууралуу көптөр кызыгат. Роберт Левандовски жашоосунда көп ийгиликке жеткен. Левандовски Польша командасынын негизги оюнчусу болуп саналат. Акыркы маектер жана жаңылыктар https://robert-lewandowski-kg.com/ сайтында. Левандовски Барселонада өзүнүн тажрыйбасын көрсөтүүдө.
Левандовски спорттук тарбиянын маанисин ар дайым белгилейт. Левандовски жаракаттан кийин дагы күчтүү кайтып келген.
Роберт Левандовски өзүнүн тамырларын сыйлайт. Роберт Левандовски карьерасын толук берилип өткөрөт.
Je suis accro a BassBet Casino, il procure une experience dynamique. Les options sont vastes comme un lac, incluant des paris sportifs dynamiques. Amplifiant le plaisir de jeu. Le suivi est irreprochable, avec une aide precise. Les paiements sont securises et rapides, cependant des offres plus genereuses seraient dynamiques. Au final, BassBet Casino est un incontournable pour les joueurs pour les fans de casino en ligne ! Par ailleurs le site est rapide et attractif, ce qui rend chaque session plus excitante. Egalement appreciable les options de paris sportifs variees, renforce le sentiment de communaute.
https://bassbetcasinobonusfr.com/|
Je suis captive par Olympe Casino, ca transporte dans un monde mythique. Les options sont vastes comme un orchestre, comprenant des jeux optimises pour les cryptos. Le bonus de bienvenue est divin. Le support client est olympien, joignable a toute heure. Les gains arrivent sans delai, de temps a autre plus de promos regulieres ajouteraient de la gloire. En resume, Olympe Casino est une plateforme qui regne sur l’Olympe pour les joueurs en quete d’epopee ! De plus le design est moderne et divin, ce qui rend chaque session plus celeste. Egalement remarquable les tournois reguliers pour la competition, propose des avantages sur mesure.
olympefr.com|
BassBet Casino m’a captive BassBet Casino, on ressent une vibe lumineuse. La selection de jeux est eclatante, proposant des jeux de table styles. 100% jusqu’a 500 € + tours gratuits. Le suivi est impeccable, joignable a tout moment. Les transactions sont fiables, neanmoins quelques tours gratuits en plus seraient top. En bref, BassBet Casino est une plateforme qui brille pour les joueurs en quete d’adrenaline ! A noter la plateforme est visuellement fluorescente, donne envie de prolonger l’eclat. Particulierement cool les options de paris variees, propose des avantages sur mesure.
https://bassbetcasinopromocodefr.com/|
J’adore l’energie rythmee de BassBet Casino, ca transporte dans un univers de beats. Les options sont vastes comme une scene de concert, offrant des sessions live immersives. Avec des depots ultra-rapides. L’assistance est rapide et pro, garantissant un service de haute qualite. Le processus est simple et vibrant, mais des offres plus genereuses seraient energiques. Pour conclure, BassBet Casino vaut une session live pour les joueurs en quete d’adrenaline ! En plus la plateforme est visuellement electrisante, ajoute une touche de rythme. Un point fort les evenements communautaires dynamiques, qui dynamise l’engagement.
bassbetcasinoappfr.com|
Je suis captive par Monte Cryptos Casino, ca offre un plaisir numerique intense. Il y a une abondance de jeux envoutants, proposant des jeux de table sophistiques. Le bonus d’entree est attractif. Disponible 24/7 via chat ou email, garantissant un service premium. Le processus est fluide comme un smart contract, de temps a autre plus de promos regulieres dynamiseraient l’experience. Pour conclure, Monte Cryptos Casino est un must pour les fans de blockchain pour ceux qui parient avec des cryptos ! A noter la plateforme est visuellement spectaculaire, facilite une immersion totale. Particulierement captivant les paiements securises en BTC/ETH, garantit des transactions fiables.
Aller ici|
J’aime l’ambiance futuriste de Monte Cryptos Casino, ca transporte dans un monde virtuel. Il y a une profusion de jeux captivants, incluant des paris live dynamiques. Le bonus d’entree est eclatant. Le support client est irreprochable, offrant des solutions claires. Les gains arrivent sans delai, cependant des recompenses supplementaires seraient ideales. Pour conclure, Monte Cryptos Casino offre une experience inoubliable pour les amateurs de casino en ligne ! A noter la plateforme est visuellement eblouissante, amplifie le plaisir de jouer. A souligner le programme VIP avec des niveaux exclusifs, offre des recompenses continues.
Visiter le site|
Cheap Robot Hoover Techniques To Simplify Your Daily Life Cheap Robot
Hoover Trick Every Individual Should Know cheap robot Hoover
Левандовскинин формасы дагы деле жогорку деңгээлде.
Левандовски жубайы менен көп кайрымдуулук иштерин колдойт. Левандовски Бавариядан кеткенден кийин дагы мыкты оюн көрсөтүүдө. Левандовски Польшанын эң мыкты чабуулчусу катары таанылган. Роберт Левандовскинин эң жаңы голдору тууралуу маалыматты https://robert-lewandowski-kg.com/ жеринен таба аласыз. Роберт Левандовски Барселонада мыкты старт жасаган.
Роберт Левандовски жашоосунда кыйынчылыктарды жеңип чыккан. Роберт Левандовскинин жаракаты көпчүлүктү тынчсыздандырган.
Левандовскинин туугандары тууралуу тарых да кызыктуу. Левандовски ар дайым жогорку деңгээлди кармайт.
Deneme bonusu veren siteler ile yüksek kazanç sağlayın. Bonus Veren Siteler dwnwmw bwnwsw vwrwn swtwlwr listesine göz atmak için hemen sitemize gelin
Проблемы с входом решаются за пару кликов.
> как зайти на сайт кракен
Зеркала обновляются автоматически.
Компания специализируется на производство уличной мебели россия, предлагая высококачественные уличные изделия для различных ландшафтов.
Выбор материала зависит от нескольких факторов, включая бюджет, стиль и предполагаемое использование мебели.
Обработка материалов является важным этапом в производстве садовой мебели, где осуществляется резка, шлифовка и покраска.
В дизайне садовой мебели учитываются различные факторы, такие как стиль, материал и окружающая среда.
Новые технологии и материалы будут определять развитие производства садовой мебели, предлагая более качественные и долговечные изделия.
Hi! How R U?
Левандовски футболдо чыдамкайлык менен мыкты натыйжа көрсөттү.
Роберт Левандовски денесин мыкты формада кармайт. Роберт Левандовски карьерасында жүздөгөн гол салган. Левандовски Польша командасынын негизги оюнчусу болуп саналат. Барселона жана Левандовски тууралуу кеңири маалымат https://robert-lewandowski-kg.com/ порталында бар. Роберт Левандовски Барселонада мыкты старт жасаган.
Роберт Левандовски бала кезинен эле футболду сүйгөн. Левандовски жаракаттан кийин дагы күчтүү кайтып келген.
Левандовскинин ата-энеси да спорт менен алектенген. Левандовски ар дайым жогорку деңгээлди кармайт.
9 Things Your Parents Taught You About Best Robot Hoover Best Robot Hoover (http://Www.Xsmoli.Com)
Ten Things You Need To Be Educated About Best Automatic Vacuum Cleaner smart Vacuum
Левандовски Барселонага кошулгандан кийин команда күчөдү.
Инстаграмда Роберт Левандовскинин посттору абдан популярдуу. Роберт Левандовски карьерасында жүздөгөн гол салган. Левандовски өз өлкөсүнүн сыймыгы. Кызыктуу фактылар менен таанышуу үчүн robert-lewandowski-kg.com сайтына кириңиз. Бул жерде анын карьерасы тууралуу кеңири маалымат бар. Роберт Левандовски Барселона менен титулдар үчүн күрөшүүдө.
Левандовски өзүнүн эмгеги менен дүйнөгө белгилүү болгон. Левандовски спорттук формасын жоготпойт.
Роберт Левандовскинин үй-бүлөлүк тамыры Польшада. Роберт Левандовскинин профессионалдуулугу суктанарлык.
astoriatogether – Community unity and collaborative neighborhood initiatives.
Ich schatze die Spannung bei Snatch Casino, es ist ein Ort voller Energie. Das Angebot an Titeln ist riesig, mit dynamischen Wettmoglichkeiten. Mit schnellen Einzahlungen. Erreichbar 24/7 per Chat oder E-Mail. Transaktionen sind zuverlassig und klar, in seltenen Fallen mehr Aktionen wurden das Erlebnis steigern. In Summe, Snatch Casino ist ideal fur Spielbegeisterte. Zusatzlich die Seite ist schnell und attraktiv, eine Prise Spannung hinzufugt. Ein tolles Feature sind die schnellen Krypto-Transaktionen, individuelle Vorteile liefern.
Snatch Casino|
nicholashirshon – Professional portfolio showcasing expertise and accomplishments.
I love how this blog promotes a healthy and balanced lifestyle It’s a great reminder to take care of our bodies and minds
1x lite http://www.1xbet-10.com .
изготовление кухни на заказ в спб http://www.kuhni-spb-2.ru .
взять микрозайм кредит займ
микрозаймы онлайн деньги
онлайн деньги микрозайм рейтинг
1xbet yeni adresi 1xbet yeni adresi .
futuregoalsnetwork.shop – Fast shipping and quality items; very satisfied with my purchase.
choice-eats – Culinary excellence with diverse and delicious dining options.
Don’t Buy Into These “Trends” Concerning Best Robot Vacuum And Mop
Best Robot Vacuum And Mop UK
learnsharegrow.shop – The layout is clean and easy to navigate; very user-friendly.
leadersunitedgroup.bond – The community feedback makes the journey feel shared, not lonely.
globalpartnershipteam.shop – Great variety of products at unbeatable prices; highly recommend.
covidtest-cyprus – Essential health services with reliable testing solutions.
teamfuture.bond – Impressive visuals and content, makes browsing enjoyable and smooth.
discovervalue.bond – Looking forward to seeing more updates and articles from this site.
winmore.bond – Looking forward to seeing more updates and features here.
connectinnovationhub.bond – I appreciate the clear structure and organized layout here.
Hey there! I could have sworn I’ve been to this blog before but after reading through some of the
post I realized it’s new to me. Nonetheless, I’m definitely delighted I found it and
I’ll be book-marking and checking back often!
+905325600307 fetoden dolayi ulkeyi terk etti
trustandunity.bond – Overall a polished site with professional and engaging content.
businessgrowthhub.shop – Impressive visuals and smooth interface; browsing feels seamless.
smartfashionboutique.bond – Fast loading pages make the experience seamless and smooth.
successfultradersclub.shop – Looks trustworthy and reliable; branding is consistent across pages.
globalalliancenetwork.bond – Content is clear, informative, and engaging; great first impression.
uniquedecorstore.shop – Impressive visuals and smooth interface; browsing feels seamless.
wellnesstourbus – Mobile health and wellness services bringing care to communities.
concernedaboutpollution – Environmental advocacy with focus on pollution awareness and solutions.
Роберт Левандовскинин статистикасы укмуштай — ал ар бир оюнда гол салат.
Левандовскинин жашоо образы көптөр үчүн мотивация. Левандовски канча жыл ойногонуна карабай, деңгээлин түшүргөн жок. Роберт Левандовски дүйнөлүк футбол жылдызы. Эгер сиз Левандовски күйөрманы болсоңуз, анда robert-lewandowski-kg.com сиз үчүн мыкты булак. Барселонадагы Левандовскинин оюнун күйөрмандар макташат.
Роберт Левандовски карьерасын үзүрлүү өткөрүүдө. Левандовски жаракаттан кийин тез эле формасын кайтарды.
Роберт Левандовски үй-бүлөсүнө чоң маани берет. Левандовски ар дайым жогорку деңгээлди кармайт.
Веб сайт https://urkarl.ru/
http://bottleart.xyz/2024/12/08/budget-friendly-ideas-for-festive-decor/
play-brary.org – Navigation is smooth and intuitive, making browsing enjoyable.
nextvision.bond – The visuals are appealing and complement the content well.
14 Cartoons About Robot Mop Which Will Brighten Your Day Best
Robot Vacuum Cleaner UK; Bbs.Xltyun.Com,
leanneslifechangingfairies.com – Navigation is smooth and pages load quickly, very responsive.
Если основной сайт недоступен, используйте зеркало
> кракен вход на сайт
Актуально на сегодня.
growthpoint.bond – Impressive design and user experience; feels professional and welcoming.
J’ai un amour vibrant pour BassBet Casino, ca offre un plaisir energique. Les options sont vastes comme une scene de concert, incluant des paris sportifs pleins de vie. L’offre de bienvenue est electrisante. L’assistance est rapide et pro, toujours pret a mixer. Les transactions sont fiables, de temps en temps quelques tours gratuits en plus seraient top. En resume, BassBet Casino vaut une session live pour les joueurs en quete d’adrenaline ! En plus le site est rapide et captivant, facilite une immersion totale. Un point fort les tournois reguliers pour la competition, assure des transactions fiables.
https://bassbetcasinoappfr.com/|
Je suis ebloui par BassBet Casino, il procure une experience brillante. Il y a un flot de jeux captivants, avec des slots aux designs fluorescents. Boostant votre mise de depart. Le support client est au top, toujours pret a eclairer. Les paiements sont securises et instantanes, parfois des bonus plus varies seraient un eclat. Pour conclure, BassBet Casino est un must pour les joueurs pour les passionnes de jeux modernes ! De plus le design est moderne et eclatant, donne envie de prolonger l’eclat. Particulierement cool les tournois reguliers pour la competition, propose des avantages sur mesure.
bassbetcasinopromocodefr.com|
Je suis accro a BassBet Casino, on ressent une ambiance de lac. La variete des titres est rapide, offrant des sessions live immersives. Avec des depots instantanes. Le suivi est irreprochable, garantissant un support de qualite. Le processus est simple et elegant, neanmoins des bonus plus varies seraient une vague. En bref, BassBet Casino est une plateforme qui ondule pour les amateurs de sensations dynamiques ! Ajoutons que l’interface est fluide comme un lac, donne envie de prolonger l’aventure. Particulierement interessant les paiements securises en crypto, renforce le sentiment de communaute.
https://bassbetcasinobonusfr.com/|
J’ai une passion parfumee pour Spinit Casino, il procure une experience exquise. Le catalogue est riche en aromes, proposant des jeux de table raffines. Le bonus de bienvenue est delicieux. L’assistance est efficace et professionnelle, joignable a toute heure. Les gains arrivent sans delai, neanmoins des recompenses additionnelles seraient royales. Dans l’ensemble, Spinit Casino est une plateforme qui enchante pour les fans de casino en ligne ! En bonus la navigation est simple et gracieuse, amplifie le plaisir de jouer. Un autre atout les paiements securises en crypto, qui booste l’engagement.
spinitcasinobonusfr.com|
createimpacttoday.shop – The site is easy to navigate, and the products are top-notch.
Je suis seduit par Impressario Casino, on ressent une ambiance delicate. Le catalogue est riche en saveurs, offrant des sessions live sophistiquees. Le bonus de bienvenue est delicieux. Le support client est impeccable, garantissant un support de qualite. Les paiements sont securises et rapides, de temps a autre des offres plus genereuses seraient exquises. Dans l’ensemble, Impressario Casino vaut une visite sophistiquee pour les amateurs de sensations elegantes ! A noter la navigation est simple et gracieuse, ce qui rend chaque session plus raffinee. A souligner les evenements communautaires engageants, qui booste l’engagement.
Voir toutes les infos|
Je suis captive par Monte Cryptos Casino, on ressent une energie blockchain. Le catalogue est opulent et divers, offrant des sessions en direct immersives. Boostant votre capital initial. Le support client est irreprochable, offrant des solutions claires. Les paiements sont securises par blockchain, mais des recompenses supplementaires seraient ideales. Pour conclure, Monte Cryptos Casino est une plateforme qui domine l’univers crypto pour les joueurs en quete d’innovation ! A noter l’interface est fluide comme un flux de donnees, ce qui rend chaque session plus immersive. A souligner les options de paris variees, offre des recompenses continues.
Voir maintenant|
Je suis seduit par Impressario Casino, c’est une plateforme qui respire le luxe. La variete des titres est elegante, comprenant des jeux compatibles avec les cryptos. Le bonus de bienvenue est genereux. L’assistance est efficace et professionnelle, joignable a toute heure. Le processus est simple et elegant, cependant des offres plus genereuses seraient exquises. Dans l’ensemble, Impressario Casino vaut une visite sophistiquee pour les passionnes de jeux modernes ! A noter la plateforme est visuellement somptueuse, donne envie de prolonger l’experience. Particulierement interessant les tournois reguliers pour la competition, qui booste l’engagement.
Voir la page d’accueil|
Je suis enchante par Impressario Casino, c’est une plateforme qui evoque le raffinement. Le catalogue est riche en saveurs, proposant des jeux de table raffines. Amplifiant le plaisir de jeu. Les agents repondent avec courtoisie, offrant des reponses claires. Les retraits sont fluides comme la Seine, neanmoins des offres plus genereuses seraient exquises. Dans l’ensemble, Impressario Casino est un incontournable pour les amateurs pour les amateurs de sensations elegantes ! De plus le design est moderne et chic, donne envie de prolonger l’experience. Particulierement interessant le programme VIP avec niveaux exclusifs, qui booste l’engagement.
DГ©couvrir toutes les infos|
купить диплом ветеринара купить диплом ветеринара .
Website https://remonttermexov.ru/ .
купить диплом в нальчике купить диплом в нальчике .
J’ai un amour vibrant pour BassBet Casino, ca offre un plaisir energique. Les titres sont d’une variete envoutante, avec des slots aux designs dynamiques. Boostant votre mise de depart. Le support client est au top, offrant des solutions claires. Les transactions sont fiables, parfois des offres plus genereuses seraient energiques. En resume, BassBet Casino offre une experience inoubliable pour les joueurs en quete d’adrenaline ! En plus le design est moderne et vibrant, ce qui rend chaque session plus vibrante. Particulierement cool les paiements securises en crypto, offre des recompenses continues.
bassbetcasinoappfr.com|
grant-jt – Professional services with expertise and dedicated client support.
J’ai un amour vibrant pour BassBet Casino, ca transporte dans un univers de notes profondes. Les titres sont d’une richesse envoutante, avec des slots aux designs soul. Avec des depots ultra-rapides. Le support client est au top, avec une aide precise. Les gains arrivent sans attendre, cependant des bonus plus varies seraient une melodie. Dans l’ensemble, BassBet Casino offre une experience inoubliable pour les passionnes de jeux modernes ! Ajoutons que le site est rapide et captivant, ce qui rend chaque session plus groovy. Egalement genial les paiements securises en crypto, offre des recompenses continues.
bassbetcasinopromocodefr.com|
Je suis emerveille par BassBet Casino, il procure une experience harmonieuse. Le catalogue est riche et varie, incluant des paris sportifs dynamiques. Le bonus de bienvenue est rythme. Le service est disponible 24/7, joignable a toute heure. Les transactions sont fiables, de temps a autre quelques tours gratuits supplementaires seraient bien venus. Pour conclure, BassBet Casino vaut une jam session pour les passionnes de jeux modernes ! Ajoutons que le site est rapide et attractif, ce qui rend chaque session plus groovy. Particulierement interessant les tournois reguliers pour la competition, renforce le sentiment de communaute.
https://bassbetcasinobonusfr.com/|
J’ai une passion feerique pour Spinit Casino, ca offre un plaisir enchante. La variete des titres est magique, offrant des sessions live immersives. Le bonus de bienvenue est magique. Le suivi est irreprochable, toujours pret a transformer. Les transactions sont fiables, parfois quelques tours gratuits supplementaires seraient bien venus. En bref, Spinit Casino offre une experience memorable pour les amateurs de sensations enchantees ! En bonus le site est rapide et captivant, ajoute une touche de mystere. A souligner le programme VIP avec des niveaux exclusifs, qui booste l’engagement.
spinitcasinobonusfr.com|
J’adore l’elegance de Impressario Casino, c’est une plateforme qui evoque le raffinement. Les options sont vastes comme un menu etoile, avec des slots aux designs elegants. 100% jusqu’a 500 € + tours gratuits. Les agents repondent avec courtoisie, toujours pret a servir. Les gains arrivent sans delai, cependant des bonus plus varies seraient un delice. En bref, Impressario Casino est un incontournable pour les amateurs pour les fans de casino en ligne ! En bonus la navigation est simple et gracieuse, facilite une immersion totale. Egalement appreciable le programme VIP avec niveaux exclusifs, qui booste l’engagement.
Trouver maintenant|
J’ai une passion debordante pour Monte Cryptos Casino, il procure une aventure virtuelle. Le catalogue est opulent et diversifie, avec des slots aux themes innovants. Le bonus d’accueil est eclatant. Le support client est stellaire, offrant des reponses claires. Les transferts sont fiables, de temps a autre des recompenses supplementaires seraient ideales. Dans l’ensemble, Monte Cryptos Casino est une plateforme qui domine l’univers crypto pour les adeptes de jeux modernes ! En bonus l’interface est fluide comme un flux de donnees, donne envie de prolonger l’aventure. Particulierement captivant les evenements communautaires decentralises, qui booste l’engagement.
Avancer|
Je suis seduit par Impressario Casino, ca transporte dans un monde chic. Il y a une abondance de jeux captivants, incluant des paris sportifs elegants. Renforcant votre capital initial. Le support client est impeccable, offrant des reponses claires. Les retraits sont fluides comme la Seine, de temps a autre plus de promos regulieres ajouteraient du charme. En resume, Impressario Casino est un incontournable pour les amateurs pour ceux qui aiment parier en crypto ! De plus l’interface est fluide comme un bal, ajoute une touche d’elegance. Un autre atout les evenements communautaires engageants, assure des transactions fiables.
Tout lire|
J’ai une affection pour Impressario Casino, c’est une plateforme qui evoque le raffinement. Le catalogue est riche en saveurs, incluant des paris sportifs distingues. Le bonus de bienvenue est delicieux. L’assistance est efficace et professionnelle, joignable a toute heure. Les paiements sont securises et rapides, de temps a autre des bonus plus varies seraient un delice. Au final, Impressario Casino garantit un plaisir constant pour les fans de casino en ligne ! Par ailleurs le site est rapide et attractif, donne envie de prolonger l’experience. Particulierement interessant les evenements communautaires engageants, qui booste l’engagement.
Voir plus|
komunahouse – Community living space fostering connection and collaboration.
What’s The Job Market For Keyless Fob Repair Professionals Like?
Keyless Fob Repair [Petra]
visit their website https://queylinmarsh.com
mdcphilly.com – Looks like a solid website; I’d revisit it for updates.
ks4thekids.com – I appreciate the straightforward layout; it’s easy to navigate.
harrietlevinmillan.com – I like how the biography and works are presented—well organized and accessible.
brauhausschmitzoktoberfest.com – Overall a strong event web presence; conveys excitement and authenticity.
clubinorout.com – I like how the content is organised and the tone looks friendly.
pp4fdr.org – Browsing this site was easy and I found the content very well-laid-out.
berrybombselfiespot – Fun and vibrant selfie destination with creative photo opportunities.
mdcphilly.com – The visuals are strong and add to the appeal of the website.
This Is The Good And Bad About Robot Cleaners Uk Buy Robot Cleaner
concernedaboutpollution.com – Pages load quickly and the navigation feels smooth and intuitive.
Five Killer Quora Answers On Robot Hoover And Mop robot hoover and mop
Веб сайт https://urkarl.ru/
asianspeedd8.com – The site has a modern look and it’s easy to browse.
grant-jt.com – The homepage feels calm and focused; no unnecessary clutter.
berrybombselfiespot.com – I’ll save it as a “must-visit” when I’m in Raleigh—I like what they’re doing.
komunahouse.com – Keep an eye on it—seems like a project with growth potential.
gailcooperspeaker.com – Overall, very good web presence—makes me want to explore further.
reindeermagicandmiracles.com – The site looks trustworthy and well-put-together; good effort.
gailcooperspeaker – Inspirational speaking with powerful messages and engaging delivery.
The 10 Scariest Things About Best Robot Vacuums Uk
best robot vacuums uk
brucknerbythebridge.com – The visuals and layout feel polished and high quality.
Five Killer Quora Answers On Robot Hoover And Mop
robot hoover and mop [pad.stuve.Uni-ulm.de]
Ich bin fasziniert von Snatch Casino, es ist ein Ort, der begeistert. Es gibt eine riesige Vielfalt an Spielen, mit spannenden Sportwetten-Angeboten. Mit einfachen Einzahlungen. Der Support ist effizient und professionell. Transaktionen sind immer sicher, ab und zu regelma?igere Promos wurden das Spiel aufwerten. Insgesamt, Snatch Casino ist ein absolutes Highlight. Nebenbei die Navigation ist einfach und klar, das Spielvergnugen steigert. Ein starker Vorteil ist das VIP-Programm mit besonderen Vorteilen, individuelle Vorteile liefern.
https://snatch-casino.de/de-de/|
his response https://quorinvale.com/
company website https://ondrelake.com/
1xbet t?rkiye giri? 1xbet t?rkiye giri? .
moved here https://lervanthoow.com
медоборудование медоборудование .
meetkatemarshall.com – I appreciated the categorization of posts; makes exploring topics really easy.
Thanks for sharing the information. I found the information very useful. That’s a awesome story you posted. I will come back to scan some more.
реабилитационный центр наркологический http://www.narkologicheskaya-klinika-24.ru .
I’ve been using sativa gummies ordinary seeing that over a month at the moment, and I’m indubitably impressed at near the absolute effects. They’ve helped me feel calmer, more balanced, and less solicitous throughout the day. My snore is deeper, I wake up refreshed, and uniform my core has improved. The value is excellent, and I cognizant the accepted ingredients. I’ll obviously heed buying and recommending them to everyone I know!
Guide To Automatic Hoovers: The Intermediate Guide
On Automatic Hoovers Automatic Hoover
Ich freue mich auf Snatch Casino, es verspricht pure Spannung. Die Auswahl ist einfach unschlagbar, mit eleganten Tischspielen. Er bietet einen gro?artigen Vorteil. Die Mitarbeiter antworten schnell und freundlich. Der Prozess ist klar und effizient, gelegentlich mehr Bonusangebote waren spitze. In Summe, Snatch Casino bietet ein einmaliges Erlebnis. Zudem die Seite ist zugig und ansprechend, eine tiefe Immersion ermoglicht. Ein gro?artiges Plus ist das VIP-Programm mit tollen Privilegien, die Gemeinschaft starken.
https://snatch-casino.de/de-de/|
Why We Our Love For Vacuum Robot (And You Should,
Too!) robotic vacuum
moeinclub.com – The content covers a wide range of topics which can appeal to many interests.
Robot Vacuum And Cleaner Tools To Improve Your Everyday
Lifethe Only Robot Vacuum And Cleaner Trick That Everybody
Should Be Able To robot vacuum and cleaner [http://www.libertyballers.com]
Cheap Robot Hoover Tools To Help You Manage Your Everyday Lifethe Only Cheap Robot Hoover Trick That Every Person Should Learn cheap Robot Hoover
centensports.com – Some interactive features would add more engagement, but overall solid.
Automatic Hoover Tools To Ease Your Everyday Lifethe Only
Automatic Hoover Trick Every Person Should Be Able To Automatic Hoover
Nine Things That Your Parent Taught You About Robot
Hoover Uk robot Hoover uk
5 Killer Quora Answers On Robot Vacuum Uk robot vacuum uk
What’s The Job Market For Smart Key Repair Professionals Like?
Smart Key Repair
купить диплом в дзержинске купить диплом в дзержинске .
safercharging.com – Overall, a solid web presence with a clear mission and good execution.
opensky-inc.com – I’ll keep an eye on how this site develops in future updates.
Five Killer Quora Answers To Mopping Robot Automatic vacuum cleaner
click here for more info https://calrenfield.com
pastorjorgetrujillo.com – The design is clean and inviting, great first impression.
website here https://donrilmeadow.com
The Best Automatic Hoover Tricks To Change Your Life
best Automatic hoover
Je suis totalement envoute par BassBet Casino, ca offre un plaisir melodique. La selection de jeux est melodieuse, proposant des jeux de table elegants. Renforcant votre capital initial. Les agents repondent comme un solo, joignable a toute heure. Les paiements sont securises et rapides, de temps a autre quelques tours gratuits supplementaires seraient bien venus. En bref, BassBet Casino est un incontournable pour les joueurs pour les fans de casino en ligne ! En bonus la plateforme est visuellement musicale, ce qui rend chaque session plus groovy. Un autre atout les tournois reguliers pour la competition, propose des avantages personnalises.
bassbetcasinobonusfr.com|
J’adore l’atmosphere dynamique de Spinit Casino, on ressent une ambiance de piste. La variete des titres est rapide, avec des slots aux designs veloces. Avec des depots instantanes. L’assistance est efficace et professionnelle, garantissant un support de qualite. Les retraits sont fluides comme un peloton, bien que des offres plus genereuses seraient veloces. Au final, Spinit Casino vaut une course rapide pour les passionnes de jeux modernes ! De plus le design est moderne et dynamique, amplifie le plaisir de jouer. A souligner les options de paris sportifs variees, renforce le sentiment de communaute.
casinospinitfr.com|
Ich bin total angetan von Snatch Casino, es entfuhrt in eine Welt voller Nervenkitzel. Die Spiele sind abwechslungsreich und fesselnd, mit Krypto-freundlichen Titeln. 100 % bis zu 500 € inklusive Freispiele. Der Support ist effizient und professionell. Der Prozess ist transparent und schnell, gelegentlich mehr Bonusvielfalt ware ein Vorteil. Im Gro?en und Ganzen, Snatch Casino ist ein Muss fur Spielbegeisterte. Ubrigens ist das Design stilvoll und einladend, eine Prise Stil hinzufugt. Ein starker Vorteil die vielfaltigen Wettmoglichkeiten, die die Gemeinschaft starken.
Snatch Casino|
Je suis absolument seduit par Monte Cryptos Casino, ca offre une sensation futuriste unique. La variete des titres est eclatante, comprenant des jeux optimises pour les cryptos. Boostant votre capital initial. Les agents repondent avec une vitesse fulgurante, avec une aide rapide et fiable. Les paiements sont securises par blockchain, de temps a autre des bonus plus varies seraient un atout. Pour conclure, Monte Cryptos Casino vaut une exploration virtuelle pour ceux qui parient avec des cryptos ! A noter le design est moderne et captivant, ce qui rend chaque session plus immersive. Un atout cle les options de paris variees, propose des avantages uniques.
Découvrir aujourd’hui|
Je suis ensorcele par Monte Cryptos Casino, ca offre une sensation futuriste unique. Il y a une profusion de jeux captivants, comprenant des jeux optimises pour les cryptos. Avec des depots crypto rapides. Disponible 24/7 via chat ou email, joignable a tout moment. Les gains arrivent sans delai, mais des bonus plus varies seraient un atout. Au final, Monte Cryptos Casino vaut une exploration virtuelle pour les passionnes de sensations numeriques ! A noter le design est moderne et captivant, ce qui rend chaque session plus immersive. A souligner les evenements communautaires decentralises, propose des avantages uniques.
Parcourir davantage|
Je suis accro a Monte Cryptos Casino, on ressent une energie decentralisee. Les options sont vastes comme un reseau, offrant des sessions live immersives. Renforcant votre capital initial. Disponible 24/7 via chat ou email, garantissant un service de pointe. Les paiements sont securises et fluides, parfois des bonus plus varies seraient un plus. En resume, Monte Cryptos Casino garantit un plaisir constant pour les amateurs de casino en ligne ! A noter le design est moderne et captivant, ce qui rend chaque session plus immersive. Egalement cool les paiements securises en BTC/ETH, renforce la communaute.
Aller plus loin|
catherinewburton.com – I’d love to see more testimonials or client stories to deepen connection.
vsmphotography.com – Would be nice to see more client testimonials or behind-the-scenes to deepen trust.
exploreopportunitiesnow.shop – The visuals are inviting and the interface feels smooth.
локации для съемок в москве на улице предлагают высококачественные услуги для создания незабываемых фотографий.
с помощью мастерского прикосновения. Лучшие фотографы Москвы имеют свой особый взгляд на мир и умеют делиться им с другими. Фотография – это не просто хобби или профессия, это способ выразить себя и свои мысли .
Фотографы Москвы имеют возможность работать с разными стилями и жанрами. Они могут снять портреты известных людей . Лучшие фотографы Москвы имеют свой собственный стиль и подход к фотографии.
Технологии и оборудование играют важную роль в фотографии дают возможность экспериментировать с различными техниками . Лучшие фотографы Москвы имеют глубокое понимание технологий, которые используются в фотографии. Они имеют возможность работать с различными форматами и размерами изображений.
Фотографы Москвы имеют возможность работать с разными типами освещения. Они могут создавать высококачественные изображения с помощью своих навыков и оборудования . Лучшие фотографы Москвы имеют свой собственный подход к фотографии.
Художественный аспект фотографии дает возможность создавать изображения, которые могут быть понятны и оценены всеми. Лучшие фотографы Москвы могут создавать по-настоящему уникальные и художественные изображения с помощью своих навыков и оборудования . Они имеют возможность работать с разными форматами и размерами изображений.
Фотографы Москвы могут создавать высококачественные изображения с помощью своих навыков и оборудования . Они имеют глубокое понимание того, как работает художественный аспект. Лучшие фотографы Москвы имеют свой собственный подход к фотографии.
В заключении фотография – это forma искусства, которая может быть использована для различных целей. Лучшие фотографы Москвы могут передать всю глубину и богатство эмоций через свои снимки . Они могут снять портреты известных людей .
Фотография – это forme искусства, которое может быть использовано для различных целей . Лучшие фотографы Москвы знают, как работать с светом и тенью . Они могут создавать по-настоящему уникальные и художественные изображения с помощью своих навыков .
toddstarnesbooktour.com – I appreciate how the dates and locations are prominently listed; helpful for attendees.
createandgrow.shop – I appreciate how the key message is presented without clutter.
startsomethinggreat.shop – Overall a positive impression; user-friendly and credible website.
findwhatyoulove.shop – I’ll bookmark this to check back for new items or deals.
theperfectgiftshop.com – The minimal design helps focus on the products without distraction.
10 Top Facebook Pages Of All-Time About Buy Robot Vacuum Cleaner
robot Vacuum Cleaners
shopandsmilealways.shop – The homepage appears minimal yet effective—good user experience.
Сравните цены на ноутбуки https://n-katalog.ru/category/noutbuki/list в десятках магазинов: для работы, учебы и игр. Характеристики, отзывы, фото, бенчмарки. Фильтры по процессору, ОЗУ, SSD, диагонали, видео, весу и автономности. Следите за акциями и динамикой стоимости — выбирайте выгодное предложение с доставкой.
микрозайм взять займ получить
simplybestchoice.shop – Overall a positive impression; user-friendly and credible website.
keepgrowingforward.shop – The site loads quite fast; browsing feels smooth on mobile too.
Map with https://fotoredaktor.top Gambia location helped a lot.
shopandsmilealways.shop – It might benefit from more detailed product information to build trust.
shopandshineeveryday.shop – The site loads quickly and the spacing makes it easy to read.
Why Robot Cleaners Uk Is Greater Dangerous Than You Think robot vacuum cleaner
Thank you for sharing your thoughts. I truly appreciate your efforts and I will be waiting for your next write ups thanks once again.
https://kra41c.com
Why Automatic Vacuum Cleaner Uk Is The Right Choice For
You? best robot vacuum cleaner uk
?Un calido saludo para todos los campeones de la suerte!
Los casinos sin regulaciГіn suelen operar desde paraГsos fiscales o zonas grises del mercado digital. Esto les permite ofrecer servicios a gran escala sin pagar impuestos locales. A cambio, los usuarios pierden derechos de reclamaciГіn o soporte legal efectivo.
п»їLos llamados casinos sin licencia son plataformas que operan fuera del marco legal establecido en un paГs. No cuentan con la supervisiГіn de autoridades oficiales, lo que puede implicar riesgos para los jugadores. Sin embargo, su existencia refleja la demanda de mayor libertad y privacidad en el juego en lГnea.
Casinos sin licencia en Espana: alternativas legales seguras – п»їhttps://casinossinlicenciaenespana.net/
?Les deseo extraordinarios recompensas brillantes !
casino sin registro
The 10 Most Scariest Things About Best Robotic Vacuum Cleaners Best robotic vacuum cleaners
geteventclipboard.com – It would be valuable to see more examples or use-cases of the product/service in action.
her explanation https://velmorhill.com/
read the article https://malricshore.com/
uniquetrendstore – Love this site, always find unique items and great deals.
Hi there it’s me, I am also visiting this website regularly, this web site is really pleasant and the visitors are genuinely sharing fastidious thoughts.
https://kra42c.com
seenministries – Faith-based ministry offering spiritual guidance and community support.
Robot Vacuum Cleaner: The Ugly Facts About Robot Vacuum Cleaner best robot vacuum cleaners uk
more https://myrathollow.com
dreamcreateinspire – Great shopping experience, fast delivery and quality items every time.
newseasoncollection – Great shopping experience, fast delivery and quality items every time.
shopthelatesttrend – Fantastic variety of products, always something new and exciting.
What’s The Current Job Market For Which Robot Vacuum Cleaner Professionals?
which robot Vacuum cleaner
electmikemontes – Political campaign focused on community representation and positive change.
our website https://nylvenfield.com/
Five Killer Quora Answers On Robot Vacuum Cleaner Uk Robot vacuum cleaner uk
Birçok bahis ve casino platformu, oyuncuları dxnxmx bxnxsx vxrxn sxtxlxr kendine çekmek için deneme bonusu kampanyaları düzenlemektedir. 2025 yılında en çok tercih edilen deneme bonusu
The Three Greatest Moments In Robot Vacuum Cleaner
With Mop History self-navigating vacuum
Backlinks for your site
Effective on all topics of the resource.
I provide backlinks to your page.
These links draw in Google crawlers to the page, this is crucial for ranking, hence it is important to optimize a platform that does not have issues that hinder development.
Placement poses no risk for your domain!
I do not write in inquiry forms, (contact forms negatively impact the site because of reports from site owners).
Posting takes place in allowed areas.
Inbound links are posted to their latest regularly updated database. There are many sites in the catalog.
Nine Things That Your Parent Taught You About Robotic Vacuum Cleaner Uk Robotic vacuum cleaner uk
Website https://amurplanet.ru/ .
globalmarketplacehub – Excellent customer service, resolved my issue quickly and efficiently.
discoverendlessideas – Inspiring content that motivates me to think outside the box.
brightfuturedeals – Great site that sparks creativity and gives me new perspectives daily.
everytrendinone – Great quality for the price; items exceeded my expectations easily.
learnshareconnect – Found items that match my style perfectly; really pleased with the selection.
shemplymade – Handcrafted products with quality craftsmanship and unique designs.
discovergreatthings – Love discovering fresh items here; keeps the space feeling updated and fun.
Hello there! This is kind of off topic but I need some help from an established blog. Is it very hard to set up your own blog? I’m not very techincal but I can figure things out pretty quick. I’m thinking about setting up my own but I’m not sure where to begin. Do you have any points or suggestions? Appreciate it
маркетплейс kraken
findyourperfectdeal – Loved the downloadable resources section; useful for planning and idea generation.
Ten Things You Learned About Kindergarden To Help You Get Best Robot
Vacuum And Mop best robot vacuum And mop uk
Через сайт https://siviagmen.com знайшли ремонт валіз Івано-Франківськ.
По фото https://buybuyviamen.com оформили стильную комнату в сером цвете.
посетить сайт
водка бет казино
Советы на https://mr-master.com.ua/uk/ вдохновили на укладку пола в беседке.
exploreamazingideas – Excellent customer support, they responded promptly and solved my issue.
yourjourneybegins – The layout is so user-friendly, finding items felt effortless and fun.
Wow that was unusual. I just wrote an incredibly long comment but after I clicked submit my comment didn’t appear. Grrrr… well I’m not writing all that over again. Anyways, just wanted to say fantastic blog!
официальный сайт kra42 cc
посмотреть в этом разделе
водка бет
brainsight-reeracoen – Transparent pricing and process made this so much easier than expected.
See What Best Robotic Hoover Tricks The Celebs Are Using
best Robotic Hoover
blinkiesdonutsca – Atmosphere felt really good, and my family enjoyed the treats too.
shopwithconfidence – The site layout feels modern and simple, really enjoyable shopping vibe.
посетить веб-сайт
водкабет играть сейчас
What’s The Current Job Market For Good Robot Vacuum Cleaner Professionals?
good robot vacuum cleaner
tabitoshigoto – The branding feels calm and welcoming, perfect for travel inspiration seekers.
Ich freue mich riesig uber Snatch Casino, es schafft eine aufregende Atmosphare. Die Auswahl ist so gro? wie ein Casino-Floor, mit Spielen, die Krypto unterstutzen. Der Willkommensbonus ist ein Highlight. Erreichbar 24/7 per Chat oder E-Mail. Gewinne kommen sofort an, allerdings mehr Bonusangebote waren ideal. Im Gro?en und Ganzen, Snatch Casino sorgt fur ununterbrochenen Spa?. Daruber hinaus die Navigation ist unkompliziert, das Spielerlebnis steigert. Ein starker Vorteil sind die schnellen Krypto-Transaktionen, die Teilnahme fordern.
snatch-casino.de|
Robot Cleaner Uk Tools To Streamline Your Everyday Lifethe Only Robot Cleaner Uk
Trick That Should Be Used By Everyone Learn robot cleaner (https://forums.ppsspp.org/)
Je suis emerveille par Spinit Casino, c’est une plateforme qui tourne avec elegance. La variete des titres est rapide, proposant des jeux de table rapides. 100% jusqu’a 500 € + tours gratuits. Le support client est veloce, avec une aide precise. Les paiements sont securises et rapides, neanmoins quelques tours gratuits supplementaires seraient bien venus. Au final, Spinit Casino offre une experience memorable pour les joueurs en quete d’excitation ! Par ailleurs l’interface est fluide comme une piste, donne envie de prolonger l’aventure. Egalement appreciable les tournois reguliers pour la competition, qui booste l’engagement.
casinospinitfr.com|
Je suis emerveille par BassBet Casino, il procure une experience harmonieuse. La selection de jeux est melodieuse, avec des slots aux designs rythmiques. 100% jusqu’a 500 € + tours gratuits. Le support est irreprochable, joignable a toute heure. Les retraits sont fluides comme un riff, neanmoins des bonus plus varies seraient un riff. Pour conclure, BassBet Casino vaut une jam session pour ceux qui aiment parier en crypto ! Par ailleurs le design est moderne et melodieux, ajoute une touche de rythme. A souligner le programme VIP avec des niveaux exclusifs, qui booste l’engagement.
https://bassbetcasinobonusfr.com/|
Je suis totalement envoute par Spinit Casino, ca offre un plaisir enchante. Le catalogue est riche et varie, incluant des paris sportifs dynamiques. 100% jusqu’a 500 € + tours gratuits. Le support client est enchante, toujours pret a transformer. Le processus est simple et elegant, cependant des bonus plus varies seraient un chapitre. Pour conclure, Spinit Casino est une plateforme qui enchante pour les amateurs de sensations enchantees ! A noter le design est moderne et enchante, facilite une immersion totale. Un autre atout les paiements securises en crypto, offre des recompenses continues.
spinitcasinobonusfr.com|
J’ai une passion devorante pour Monte Cryptos Casino, c’est une plateforme qui pulse comme un reseau blockchain. Il y a une profusion de jeux captivants, incluant des paris live dynamiques. Elevant l’experience de jeu. Les agents repondent avec une vitesse fulgurante, garantissant un service premium. Les paiements sont securises par blockchain, cependant des recompenses supplementaires seraient ideales. En bref, Monte Cryptos Casino est un must pour les fans de blockchain pour les amateurs de casino en ligne ! De plus le site est rapide et futuriste, facilite une immersion totale. Particulierement captivant les tournois reguliers pour la competition, propose des avantages uniques.
Voir plus|
Je suis ebloui par Monte Cryptos Casino, ca offre une sensation futuriste unique. Il y a une profusion de jeux captivants, avec des slots aux designs modernes. Boostant votre capital initial. Les agents repondent avec une vitesse fulgurante, garantissant un service premium. Les transferts sont fiables, neanmoins des recompenses supplementaires seraient ideales. En resume, Monte Cryptos Casino vaut une exploration virtuelle pour les passionnes de sensations numeriques ! De plus le site est rapide et futuriste, amplifie le plaisir de jouer. Un atout cle les paiements securises en BTC/ETH, renforce la communaute.
Ouvrir ici|
J’adore le glamour de Impressario Casino, on ressent une energie glamour. La collection de jeux est eclatante, avec des slots aux designs sophistiques. Boostant votre capital initial. Disponible 24/7 via chat ou email, offrant des reponses claires. Les paiements sont securises et rapides, bien que des bonus plus varies seraient une star. Pour conclure, Impressario Casino est une plateforme qui captive pour les amateurs de casino en ligne ! En plus la plateforme brille comme une premiere, ajoute une touche de prestige. A noter les paiements securises en crypto, assure des transactions fiables.
Commencer ici|
J’ai une passion debordante pour Monte Cryptos Casino, il procure une aventure virtuelle. Les options sont vastes comme un reseau, offrant des sessions live immersives. Le bonus d’accueil est eclatant. Disponible 24/7 via chat ou email, avec une aide precise et rapide. Les transferts sont fiables, neanmoins des bonus plus varies seraient un plus. Au final, Monte Cryptos Casino offre une experience inoubliable pour les joueurs en quete d’innovation ! De plus le site est rapide et futuriste, facilite une immersion totale. Egalement cool le programme VIP avec des niveaux exclusifs, renforce la communaute.
Aller ici|
clevelandchristmasclub – Festive community organization spreading holiday joy and cheer.
10 Apps That Can Help You Control Your Best Automatic Vacuum Cleaner automatic vacuum Cleaners
На сайті zebraschool.com.ua відремонтували годинник у Луцьку — тепер працює бездоганно
realherschel – I bookmarked this for later, will check back for new arrivals.
Je suis accro a BassBet Casino, c’est une plateforme qui ondule avec elegance. Il y a une profusion de jeux excitants, avec des slots aux designs fluviaux. 100% jusqu’a 500 € + tours gratuits. L’assistance est efficace et professionnelle, joignable a toute heure. Les gains arrivent sans delai, parfois plus de promos regulieres ajouteraient du rythme. En resume, BassBet Casino vaut une peche excitante pour les joueurs en quete d’excitation ! En bonus le site est rapide et attractif, ajoute une touche de vitesse. A souligner les tournois reguliers pour la competition, assure des transactions fiables.
https://bassbetcasinobonus777fr.com/|
Je suis totalement envoute par Olympe Casino, ca offre un plaisir melodieux. La variete des titres est divine, offrant des sessions live immortelles. 100% jusqu’a 500 € + tours gratuits. Le service est disponible 24/7, garantissant un support celeste. Le processus est simple et glorieux, de temps a autre des offres plus genereuses seraient olympiennes. Pour conclure, Olympe Casino garantit un plaisir divin pour les fans de casino en ligne ! A noter la plateforme est visuellement olympienne, ce qui rend chaque session plus celeste. Un atout olympien les paiements securises en crypto, qui booste l’engagement.
https://olympefr.com/|
Je suis epate par BassBet Casino, on ressent une vibe electrisante. Il y a un flot de jeux captivants, avec des slots aux designs dynamiques. Amplifiant l’excitation du jeu. Les agents repondent comme un beat parfait, offrant des solutions claires. Les transactions sont fiables, neanmoins des recompenses supplementaires seraient vibrantes. Pour conclure, BassBet Casino garantit un fun non-stop pour les amateurs de sensations vibrantes ! En plus le site est rapide et captivant, booste le plaisir de jouer. Egalement genial le programme VIP avec des niveaux exclusifs, propose des avantages sur mesure.
bassbetcasinoappfr.com|
Website https://photo-res.ru/ .
ohmydrifter – Would like to see more recent updates, but what’s here is quality.
Je suis emerveille par BassBet Casino, il procure une aventure groovy. Les options sont vastes comme un concert, incluant des paris sportifs dynamiques. 100% jusqu’a 500 € + tours gratuits. Le service est disponible 24/7, joignable a toute heure. Les paiements sont securises et rapides, bien que des bonus plus varies seraient un riff. En bref, BassBet Casino est un incontournable pour les joueurs pour ceux qui aiment parier en crypto ! Par ailleurs le site est rapide et attractif, donne envie de prolonger l’aventure. Egalement appreciable les paiements securises en crypto, offre des recompenses continues.
https://bassbetcasinologinfr.com/|
Je suis totalement envoute par Spinit Casino, il procure une experience magique. Il y a une profusion de jeux fascinants, incluant des paris sportifs dynamiques. Amplifiant le plaisir de jeu. Le support client est enchante, offrant des reponses claires. Les gains arrivent sans delai, de temps a autre des bonus plus varies seraient un chapitre. Au final, Spinit Casino offre une experience memorable pour les amateurs de sensations enchantees ! De plus le design est moderne et enchante, ce qui rend chaque session plus enchantee. Un autre atout le programme VIP avec des niveaux exclusifs, offre des recompenses continues.
spinitcasinologinfr.com|
Je suis ensorcele par Monte Cryptos Casino, ca transporte dans un monde virtuel. Il y a une profusion de jeux captivants, avec des slots aux designs modernes. Le bonus d’entree est scintillant. Le support client est irreprochable, joignable a tout moment. Les gains arrivent sans delai, mais des offres plus genereuses ajouteraient du charme. En resume, Monte Cryptos Casino est un must pour les fans de blockchain pour les amateurs de casino en ligne ! De plus la navigation est simple comme un wallet, facilite une immersion totale. Un atout cle les paiements securises en BTC/ETH, offre des recompenses continues.
Voir les meilleurs choix|
This is my first time pay a visit at here and i am truly impressed to read everthing at single place.
kra42 cc
Je suis seduit par Impressario Casino, c’est une plateforme qui evoque le raffinement. La variete des titres est raffinee, proposant des jeux de table raffines. Renforcant votre capital initial. Le suivi est irreprochable, offrant des reponses claires. Les paiements sont securises et rapides, de temps a autre des recompenses additionnelles seraient royales. En resume, Impressario Casino est un incontournable pour les amateurs pour les passionnes de jeux modernes ! Ajoutons que le design est moderne et chic, ce qui rend chaque session plus raffinee. A souligner les tournois reguliers pour la competition, qui booste l’engagement.
Parcourir les offres|
J’ai une obsession brulante pour Monte Cryptos Casino, il offre une aventure chiffree palpitante. Les options sont vastes comme un reseau, incluant des paris live dynamiques. Avec des depots crypto instantanes. Le suivi est irreprochable, avec une aide precise et fiable. Les retraits filent comme une transaction blockchain, de temps a autre plus de promos regulieres dynamiseraient l’experience. En resume, Monte Cryptos Casino garantit un plaisir constant pour les joueurs en quete d’innovation ! En bonus le site est rapide et futuriste, ce qui rend chaque session plus immersive. Un avantage notable les tournois reguliers pour la competition, garantit des transactions fiables.
DГ©couvrir le site complet|
Je suis seduit par Impressario Casino, ca offre un plaisir sophistique. La variete des titres est raffinee, incluant des paris sportifs distingues. Avec des depots instantanes. Le service est disponible 24/7, joignable a toute heure. Les gains arrivent sans delai, parfois des bonus plus varies seraient un delice. Au final, Impressario Casino est un incontournable pour les amateurs pour les fans de casino en ligne ! En bonus la navigation est simple et gracieuse, ajoute une touche d’elegance. Un autre atout les evenements communautaires engageants, qui booste l’engagement.
Trouver plus|
Website https://fishexpo-volga.ru/ .
J’ai une passion ardente pour Monte Cryptos Casino, ca transporte dans un univers futuriste. Les options sont vastes comme un reseau decentralise, proposant des jeux de table sophistiques. Le bonus d’accueil est eclatant. Les agents repondent avec une precision quantique, joignable instantanement. Les retraits sont fulgurants, cependant des recompenses supplementaires seraient top. En resume, Monte Cryptos Casino offre une experience memorable pour les joueurs en quete d’innovation ! Par ailleurs la navigation est simple comme un wallet, amplifie le plaisir de jouer. Egalement remarquable les options de paris variees, qui booste l’engagement.
Voir les nouveautГ©s|
Why Everyone Is Talking About Automatic Vacuum Cleaner Uk Right Now automatic vacuum Cleaners
анонимная наркологическая помощь в москве анонимная наркологическая помощь в москве .
This website really has all of the information I needed about this subject and didn’t know who to ask.
kra42 at
hopeandlace – Their portfolio appears creative and professional, great for anyone looking for event design.
Robot Vacuum And Cleaner Tools To Ease Your Daily Lifethe One Robot Vacuum And
Cleaner Trick That Everyone Should Be Able To robot vacuum and cleaner
Five Killer Quora Answers To Robot Vacuum Uk robot Vacuum uk
motivilovesmusic – Happy to do a deeper check (traffic stats, ownership registry) if you’d like to assess it further.
Guide To Best Robot Vacuum Uk: The Intermediate Guide The Steps To Best Robot Vacuum Uk Best
Robot Vacuum Uk (https://Www.Footballzaa.Com)
bwaylocations – Prime location services with strategic placement and accessibility.
trabas007hoki – I’d like to see more about what they offer—info seems light so far.
Robot Cleaner Vacuum And Mop Tools To Ease Your Everyday Lifethe Only Robot Cleaner Vacuum And Mop Trick Every Individual Should Know robot Cleaner vacuum and mop
Robot Robotic Vacuum Cleaners Tips To Relax Your Everyday Lifethe
Only Robot Robotic Vacuum Cleaners Trick That Every Person Must Learn Robot robotic Vacuum Cleaners
Ich schatze die Energie bei Cat Spins Casino, es ist ein Ort, der begeistert. Die Auswahl ist so gro? wie ein Casino-Floor, mit packenden Live-Casino-Optionen. Der Bonus ist wirklich stark. Der Service ist von hochster Qualitat. Transaktionen sind immer sicher, von Zeit zu Zeit zusatzliche Freispiele waren ein Bonus. In Summe, Cat Spins Casino ist ein Highlight fur Casino-Fans. Au?erdem die Navigation ist unkompliziert, eine Note von Eleganz hinzufugt. Ein gro?artiges Bonus die breiten Sportwetten-Angebote, fortlaufende Belohnungen bieten.
Details ansehen|
Ich freue mich riesig uber Cat Spins Casino, es begeistert mit Dynamik. Das Angebot ist ein Paradies fur Spieler, mit Spielautomaten in beeindruckenden Designs. Mit blitzschnellen Einzahlungen. Der Service ist absolut zuverlassig. Transaktionen laufen reibungslos, jedoch haufigere Promos wurden begeistern. Am Ende, Cat Spins Casino ist definitiv einen Besuch wert. Nebenbei die Oberflache ist benutzerfreundlich, eine vollstandige Eintauchen ermoglicht. Ein gro?es Plus sind die sicheren Krypto-Transaktionen, kontinuierliche Belohnungen bieten.
Mehr erfahren|
Ich liebe die Atmosphare bei Cat Spins Casino, es ladt zu unvergesslichen Momenten ein. Die Auswahl ist atemberaubend vielfaltig, mit aufregenden Live-Casino-Erlebnissen. Er macht den Einstieg unvergesslich. Der Service ist rund um die Uhr verfugbar. Transaktionen sind zuverlassig und effizient, von Zeit zu Zeit gro?ere Angebote waren super. Abschlie?end, Cat Spins Casino bietet ein unvergessliches Erlebnis. Ubrigens die Navigation ist unkompliziert, das Spielvergnugen steigert. Ein gro?er Pluspunkt die lebendigen Community-Events, personliche Vorteile bereitstellen.
Seite erkunden|
Ich bin beeindruckt von Cat Spins Casino, es sorgt fur ein fesselndes Erlebnis. Die Spielesammlung ist uberwaltigend, mit aufregenden Live-Casino-Erlebnissen. Er macht den Start aufregend. Die Mitarbeiter sind immer hilfsbereit. Gewinne kommen ohne Verzogerung, von Zeit zu Zeit regelma?igere Promos wurden das Spiel aufwerten. Abschlie?end, Cat Spins Casino ist ein Ort, der begeistert. Nebenbei die Benutzeroberflache ist klar und flussig, das Spielvergnugen steigert. Ein gro?es Plus die regelma?igen Wettbewerbe fur Spannung, zuverlassige Transaktionen sichern.
Jetzt zugreifen|
5 Robot Cleaners Uk Instructions From The Professionals Buy robot Cleaner
Je suis bluffe par Ruby Slots Casino, on ressent une ambiance festive. Le catalogue de titres est vaste, offrant des sessions live immersives. Le bonus initial est super. Le support est rapide et professionnel. Les retraits sont ultra-rapides, a l’occasion plus de promotions frequentes boosteraient l’experience. Pour conclure, Ruby Slots Casino est un must pour les passionnes. Notons egalement la plateforme est visuellement electrisante, permet une immersion complete. Un point fort les tournois reguliers pour la competition, renforce la communaute.
Approfondir|
Je suis completement seduit par Ruby Slots Casino, c’est un lieu ou l’adrenaline coule a flots. Il y a une abondance de jeux excitants, incluant des paris sportifs en direct. Il booste votre aventure des le depart. Le service d’assistance est au point. Les retraits sont fluides et rapides, en revanche quelques tours gratuits supplementaires seraient cool. Au final, Ruby Slots Casino garantit un plaisir constant. En bonus le site est rapide et style, amplifie le plaisir de jouer. Particulierement attrayant le programme VIP avec des privileges speciaux, assure des transactions fiables.
Explorer maintenant|
J’ai un veritable coup de c?ur pour Ruby Slots Casino, ca transporte dans un monde d’excitation. Le catalogue de titres est vaste, offrant des sessions live immersives. Il amplifie le plaisir des l’entree. Disponible a toute heure via chat ou email. Les retraits sont ultra-rapides, cependant quelques tours gratuits supplementaires seraient cool. En bref, Ruby Slots Casino assure un fun constant. En plus la plateforme est visuellement dynamique, permet une immersion complete. Egalement top les options variees pour les paris sportifs, offre des bonus constants.
Ruby Slots|
Je suis sous le charme de Sugar Casino, ca pulse comme une soiree animee. La variete des jeux est epoustouflante, comprenant des jeux crypto-friendly. 100% jusqu’a 500 € plus des tours gratuits. Le service client est de qualite. Les paiements sont surs et fluides, de temps a autre quelques tours gratuits en plus seraient geniaux. En conclusion, Sugar Casino est un incontournable pour les joueurs. A souligner la plateforme est visuellement dynamique, apporte une energie supplementaire. A souligner les paiements en crypto rapides et surs, assure des transactions fiables.
Lire les dГ©tails|
J’adore l’ambiance electrisante de Sugar Casino, il cree un monde de sensations fortes. Les jeux proposes sont d’une diversite folle, avec des machines a sous aux themes varies. 100% jusqu’a 500 € plus des tours gratuits. Disponible a toute heure via chat ou email. Les retraits sont ultra-rapides, occasionnellement des offres plus genereuses rendraient l’experience meilleure. En somme, Sugar Casino est un endroit qui electrise. Ajoutons aussi le design est moderne et energique, booste le fun du jeu. Un avantage notable les transactions en crypto fiables, qui motive les joueurs.
Avancer|
Five Killer Quora Answers To Robotic Hoover Robotic
hoover And mop – http://proauto.lv/User/fowlcolumn6/ –
15 Best Robot Vacuum Cleaners Bloggers You Need To Follow Best Robot Vacuum Cleaners (http://Www.Ludikarus.Com)
Website https://remonttermexov.ru/ .
15 Surprising Stats About Mopping Robot automatic vacuum Cleaners
17 Reasons Not To Be Ignoring Automatic Vacuum Cleaner robotic vacuuming device
turnerhallrestaurant – Exceptional dining experience with quality cuisine and atmosphere.
Thanks for any other informative website. Where else could I am getting that kind of info written in such an ideal means? I have a challenge that I am just now running on, and I’ve been on the glance out for such information.
маркетплейс kraken
globaltrendmarket – I’d recommend checking the site’s age, trust signals, and whether the business is registered.
dearsparrows – The blog posts are surprisingly in-depth, good for someone wanting niche insights.
pepplish – If buying internationally, check shipping, customs fees and how fresh the product remains on arrival.
connectdiscovergrow – Might be worth following or subscribing if you’re aiming for growth in your career or business.
shopwithconfidence – The name is catchy and gives a strong first impression of trust and ease.
flourandoak – The branding “Flour & Oak” suggests craftsmanship and wood-fired or rustic baking, which is appealing.
nomnomnomfordogs – Packaging and product descriptions look detailed which suggests care in making the treats.
keepgrowingforward – Clean layout and easy navigation made browsing enjoyable and stress-free.
staycuriousalways – I’d check for contact details and about-page to ensure it’s well maintained and trustable.
theperfectgiftshop – I like the promise of “perfect gift” in the name, makes me curious what the site offers.
brightnightpdx – A suggestion: check domain age and whether the SSL certificate is up to date to ensure it’s safe.
exploreopportunitiesnow – Would be nice to see more about who runs it, and how often content is updated.
bestdealsforlife – The site might serve for affiliate / deal purposes—make sure products are real and reliable.
createandgrow – I’d recommend exploring the site further to verify the content’s freshness and legitimacy.
Why Robot Vacuum Cleaners Uk Is Your Next Big Obsession autonomous vacuum (https://digitaltibetan.Win/wiki/Post:10_Things_We_All_Are_Hateful_About_Self_Cleaning_Robot_Vacuum)
spiritoftheaerodrome – Aviation heritage and historical preservation with passion.
What’s The Current Job Market For Good Robot Vacuum Cleaner Professionals Like?
good robot vacuum cleaner
5 Killer Quora Answers On Robot Hoover And Mop Robot hoover and Mop
5 Killer Quora Answers On Robot Vacuum Uk robot vacuum Uk
Guide To Best Robot Vacuum Uk: The Intermediate Guide In Best Robot
Vacuum Uk robot vacuum uk
Hi, I would like to subscribe for this website to get hottest updates, therefore where can i do it please help.
https://kra41c.com
34crooke – Unique address with distinctive character and presence.
buildyourdreamtoday – Without visible trust signals or user reviews, it’s hard to gauge the site’s reliability.
Nice post. I learn something totally new and challenging on blogs I stumbleupon everyday. It’s always useful to read articles from other writers and practice a little something from their websites.
https://casabonitamadeiras.com.br/skachat-melbet-na-telefon-2025/
loftsonlex – Modern urban living with stylish loft accommodations.
ShopTheBestToday – Deals are updated regularly, site is trustworthy and easy to browse.
What Is Buy Cleaning Robot? History Of Buy Cleaning Robot
vacuum Robot
ExploreAmazingIdeas – Content is unique, always something exciting and fresh to discover online.
When designing wedding invitations, many couples use personalized wedding stamp, to add personality and flair to your special invitations.
Wedding stamps can make wedding invitations and other wedding-related letters more special . They come in a variety of designs and styles, from traditional to modern Wedding stamps can be found in many different designs and styles, from traditional to modern . Couples can choose the ones that best fit their wedding theme and style The choice of wedding stamp depends on the couple’s wedding theme and style . Wedding stamps can also be customized with the couple’s names, wedding date, and other personal details Couples can add their names, wedding date, and other personal details to their wedding stamps .
Wedding stamps are not only beautiful but also meaningful Wedding stamps are not only aesthetically pleasing but also meaningful . They symbolize the union of two people and the beginning of their new life together Wedding stamps signify the joining of two people and the start of their new life. Couples can use them to send thank-you notes, invitations, and other wedding-related correspondence Couples can use wedding stamps to send thank-you notes, invitations, and other wedding-related mail . Wedding stamps can also be collected as a keepsake Couples can collect wedding stamps as a reminder of their special day .
The history of wedding stamps dates back to the mid-20th century Wedding stamps have been around since the 1950s . The first wedding stamps were introduced by the United States Postal Service The United States Postal Service introduced the first wedding stamps . They were designed to commemorate special occasions such as weddings and anniversaries Wedding stamps were initially designed to celebrate special occasions, such as weddings and anniversaries. Since then, wedding stamps have become a popular way to celebrate weddings Wedding stamps are now a popular tradition in many weddings.
The designs of wedding stamps have evolved over the years The designs of wedding stamps have changed over time . From traditional to modern, there are many different designs to choose from Couples can choose from a variety of designs, including traditional, modern, and vintage . Some wedding stamps feature romantic landscapes, while others feature beautiful floral arrangements Some wedding stamps feature romantic landscapes, while others feature beautiful flowers . Couples can choose the ones that best fit their wedding theme and style Couples can choose the wedding stamps that best fit their wedding theme and style .
There are many different types of wedding stamps available Wedding stamps come in many different types . Some are designed specifically for wedding invitations, while others are designed for thank-you notes and other correspondence Some wedding stamps are designed for wedding invitations, while others are designed for thank-you notes and other documents. Couples can also choose from a variety of shapes and sizes Couples can choose from a variety of shapes and sizes . Some wedding stamps are heart-shaped, while others are square or circular Some wedding stamps are heart-shaped, while others are square or round.
Wedding stamps can also be customized with the couple’s names, wedding date, and other personal details Couples can add their names, wedding date, and other personal details to their wedding stamps . This makes them a unique and meaningful way to commemorate the wedding Adding personal details to wedding stamps makes them a special and meaningful way to mark the occasion. Couples can use them to send invitations, thank-you notes, and other wedding-related correspondence Wedding stamps can be used by couples to send thank-you notes, invitations, and other wedding-related letters .
In conclusion, wedding stamps are a beautiful and meaningful way to add a personal touch to wedding invitations and other wedding-related correspondence To conclude, wedding stamps are a beautiful way to make wedding invitations and other wedding-related letters more special. They come in a variety of designs and styles, and can be customized with the couple’s names, wedding date, and other personal details They come in many different designs and styles, and can be personalized with the couple’s names, wedding date, and other personal information . Couples can use them to send invitations, thank-you notes, and other wedding-related correspondence Couples can use wedding stamps to send invitations, thank-you notes, and other wedding-related mail . Wedding stamps are a unique and meaningful way to commemorate the wedding Customizing wedding stamps with personal details makes them a unique and meaningful way to celebrate the wedding .
Overall, wedding stamps are a wonderful way to make the wedding planning process more special and meaningful Wedding stamps can make the wedding planning process more enjoyable and significant . They can be used in many different ways, from sending invitations to decorating the wedding album Wedding stamps can be used for many different purposes, including sending invitations and decorating the wedding album . Couples can choose the wedding stamps that best fit their wedding theme and style The choice of wedding stamp depends on the couple’s wedding theme and style . By using wedding stamps, couples can add a personal touch to their wedding and make it even more special and memorable Using wedding stamps can make the wedding more special and meaningful.
To create a special atmosphere at your wedding, you can order custom-made custom stamp for wedding invitations, which can be used for cards and invitations.
The wedding stamps are a great way to make the wedding invitation stand out . They can be used on invitations, thank-you cards, and other wedding-related correspondence The wedding stamps can be used to create beautiful wedding stationery. Wedding stamps come in a variety of designs and styles The wedding stamps can be designed to match the wedding colors.
Wedding stamps are not just limited to traditional designs The wedding stamps can feature modern and trendy designs . They can also be used to convey a special message or theme The wedding stamps can be used to express the couple’s personality. Wedding stamps are a great way to make the wedding stationery stand out The wedding stamps can add a personal touch to the wedding stationery .
There are many different types of wedding stamps available The wedding stamps can be traditional or modern . Some popular types of wedding stamps include personalized stamps The personalized stamps can feature a special message or quote . Other types of wedding stamps include photo stamps The photo stamps can be designed to match the wedding theme .
Wedding stamps can also be designed to match the wedding theme The wedding stamps can be used to create a cohesive and stylish wedding stationery. Some couples may choose to use custom wedding stamps The custom wedding stamps can feature a special message or quote . Wedding stamps are a great way to add a personal touch to the wedding stationery The wedding stamps can add a touch of elegance to the wedding invitations .
Wedding stamps can be used in a variety of ways The wedding stamps can be used on wedding invitations . They can be used to add a personal touch to the wedding stationery The wedding stamps can add a touch of elegance to the wedding invitations . Wedding stamps can also be used to convey a special message or theme The wedding stamps can be designed to match the wedding theme .
Wedding stamps can be used on a variety of wedding stationery The wedding stamps can be used on wedding invitations . They can be used to create a cohesive and stylish wedding stationery The wedding stamps can be designed to match the wedding style. Wedding stamps are a great way to make the wedding stationery stand out The wedding stamps can be designed to match the wedding theme.
In conclusion, wedding stamps are a unique and personal way to commemorate a special day The wedding stamps can be customized to match the theme of the wedding . They can be used on invitations, thank-you cards, and other wedding-related correspondence The wedding stamps are a thoughtful way to express gratitude . Wedding stamps come in a variety of designs and styles The wedding stamps can be designed to match the wedding colors.
Wedding stamps are a great way to add a personal touch to the wedding stationery The wedding stamps can be designed to match the wedding style. They can also be used to convey a special message or theme The wedding stamps can be designed to match the wedding theme . Wedding stamps are a unique and thoughtful way to commemorate a special day Wedding stamps are an essential part of the wedding stationery.
uniquetrendstore – Good candidate for supplemental backlink use—just ensure you also use stronger established domains to balance your profile.
Веб сайт https://urkarl.ru/
10 Things You Learned In Kindergarden That Will Aid You In Obtaining Best Robot Vacuum
And Mop Best robot vacuum and mop UK
makelifebetter – Great selection of items, site makes finding deals really easy.
InspireEverydayLife – Signing up was simple, notifications keep me updated about fresh content.
Why You Should Concentrate On Enhancing Vacuum Cleaners Robot robotic vacuum Cleaner
Je suis emerveille par Olympe Casino, c’est une plateforme qui resonne comme une lyre. Le catalogue est riche en melodies, offrant des sessions live immortelles. Amplifiant l’aventure de jeu. Le suivi est irreprochable, toujours pret a guider. Les paiements sont securises et fluides, neanmoins des offres plus genereuses seraient olympiennes. Dans l’ensemble, Olympe Casino merite une ascension celeste pour les joueurs en quete d’epopee ! De plus l’interface est fluide comme un nectar, facilite une immersion totale. A souligner les options de paris sportifs variees, renforce le sentiment de communaute.
olympefr.com|
FindYourPerfectDeal – Easy navigation, site layout makes shopping smooth and enjoyable overall.
changeyourworld – Always something new to discover, makes online shopping fun and exciting.
startsomethinggreat – Easy navigation, site layout makes shopping smooth and enjoyable overall.
ShopAndSmileAlways – Always something new to discover, makes online shopping fun and exciting.
TheBestPlaceToShop – I keep returning here, always find interesting products quickly and easily.
learnshareconnect – Thought-provoking articles and discussions that broaden understanding and perspectives.
TrendyFindsHub – Love the variety of products, always find what I need quickly.
подробнее здесь
казино водка бет
findwhatyoulove – Prices are reasonable, found exactly what I wanted without any hassle.
everydayvaluecorner – Deals are updated frequently, site is reliable and trustworthy overall.
everytrendinone – Great selection of items, site makes finding deals really easy.
newseasoncollection – Prices are reasonable, found exactly what I wanted without any hassle.
yourjourneybegins – Highly recommend this platform, shopping experience is smooth and enjoyable.
What’s The Current Job Market For Best Automatic Vacuum Cleaner Professionals?
Automatic vacuum cleaner
Ich bin vollig uberzeugt von Cat Spins Casino, es sorgt fur pure Unterhaltung. Das Angebot ist ein Paradies fur Spieler, mit aufregenden Live-Casino-Erlebnissen. Der Willkommensbonus ist gro?zugig. Der Kundensupport ist top. Die Zahlungen sind sicher und zuverlassig, in manchen Fallen waren mehr Bonusvarianten ein Plus. Alles in allem, Cat Spins Casino ist ein Muss fur Spieler. Zudem die Plattform ist visuell beeindruckend, jeden Augenblick spannender macht. Ein hervorragendes Plus die dynamischen Community-Veranstaltungen, exklusive Boni bieten.
Jetzt entdecken|
Ich schatze die Spannung bei Cat Spins Casino, es entfuhrt in eine Welt voller Spa?. Es gibt eine Fulle an aufregenden Titeln, mit packenden Live-Casino-Optionen. Er steigert das Spielvergnugen sofort. Die Mitarbeiter sind immer hilfsbereit. Die Zahlungen sind sicher und effizient, ab und zu mehr Aktionen waren ein Gewinn. Zum Schluss, Cat Spins Casino bietet ein unvergessliches Erlebnis. Au?erdem die Seite ist zugig und ansprechend, jeden Moment aufregender macht. Ein wichtiger Vorteil die dynamischen Community-Events, die die Motivation erhohen.
Zum Ansehen klicken|
J’ai une passion lyrique pour Olympe Casino, on ressent une energie divine. Les options sont vastes comme un orchestre, proposant des jeux de table glorieux. 100% jusqu’a 500 € + tours gratuits. Le suivi est irreprochable, joignable a toute heure. Le processus est simple et glorieux, de temps a autre plus de promos regulieres ajouteraient de la gloire. Au final, Olympe Casino est une plateforme qui regne sur l’Olympe pour les fans de casino en ligne ! Ajoutons que la plateforme est visuellement olympienne, facilite une immersion totale. Particulierement captivant les evenements communautaires engageants, qui booste l’engagement.
olympefr.com|
https://zumo-spin-games.com/
her response
uniswap exchange
Je suis enthousiasme par Ruby Slots Casino, ca offre un plaisir vibrant. La selection est riche et diversifiee, avec des slots aux designs captivants. Avec des depots rapides et faciles. Le suivi est impeccable. Le processus est simple et transparent, bien que quelques tours gratuits supplementaires seraient cool. Au final, Ruby Slots Casino offre une aventure memorable. A souligner le site est rapide et immersif, ajoute une touche de dynamisme. Particulierement fun les evenements communautaires engageants, offre des bonus constants.
Ouvrir la page|
Je suis epate par Sugar Casino, il procure une sensation de frisson. On trouve une gamme de jeux eblouissante, offrant des sessions live palpitantes. Il amplifie le plaisir des l’entree. Le suivi est toujours au top. Les paiements sont securises et instantanes, neanmoins plus de promos regulieres dynamiseraient le jeu. En bref, Sugar Casino est un lieu de fun absolu. Ajoutons que la navigation est fluide et facile, permet une immersion complete. Un avantage notable les tournois reguliers pour la competition, qui booste la participation.
Continuer ici|
J’adore le dynamisme de Sugar Casino, on y trouve une energie contagieuse. Le catalogue de titres est vaste, comprenant des jeux optimises pour Bitcoin. Il amplifie le plaisir des l’entree. Les agents sont toujours la pour aider. Les transactions sont d’une fiabilite absolue, toutefois des offres plus consequentes seraient parfaites. En somme, Sugar Casino offre une aventure inoubliable. Par ailleurs le site est rapide et engageant, ajoute une vibe electrisante. A souligner les tournois reguliers pour la competition, garantit des paiements securises.
DГ©couvrir la page|
1 x code promo de pari The allure of 1xBet, with its wide array of betting options, is undeniable. However, navigating the world of promo codes can be a labyrinthine task. Whether you seek a “code promo 1xBet” for sports betting, casino games, or simply a “bonus inscription 1xBet,” understanding the landscape is key.
Je suis bluffe par Ruby Slots Casino, ca invite a plonger dans le fun. Le choix est aussi large qu’un festival, proposant des jeux de table classiques. Avec des transactions rapides. Disponible a toute heure via chat ou email. Le processus est clair et efficace, neanmoins plus de promotions frequentes boosteraient l’experience. Pour faire court, Ruby Slots Casino garantit un plaisir constant. Ajoutons aussi l’interface est lisse et agreable, booste le fun du jeu. Un point cle les paiements securises en crypto, propose des avantages uniques.
Aller plus loin|
15 Best Robot Vacuum And Mop Bloggers You Need To
Follow Best Robot Vacuum And Mop
Responsible For An Auto Hoover Robot Budget?
12 Best Ways To Spend Your Money automatic floor vacuum
Hi there, its pleasant post regarding media print, we all understand media is a impressive source of data.
https://medilinxstg.wpengine.com/mobilnaya-versiya-melbet-2025-obzor/
You’ll Never Be Able To Figure Out This Robotic Vacuum
Cleaners Uk’s Tricks Robotic vacuum cleaners uk
olympicsbrooklyn – Sports and athletic excellence with community engagement.
Ich habe eine Leidenschaft fur Cat Spins Casino, es ladt zu spannenden Spielen ein. Die Auswahl ist so gro? wie ein Casino-Floor, mit stilvollen Tischspielen. Er steigert das Spielvergnugen sofort. Der Kundendienst ist ausgezeichnet. Der Prozess ist transparent und schnell, ab und zu mehr Bonusvielfalt ware ein Vorteil. Zum Schluss, Cat Spins Casino garantiert langanhaltenden Spa?. Ubrigens die Navigation ist einfach und klar, das Spielerlebnis bereichert. Ein starkes Plus ist das VIP-Programm mit besonderen Vorteilen, die Community enger verbinden.
Website besuchen|
Ich habe eine Leidenschaft fur Cat Spins Casino, es bietet eine Welt voller Action. Es gibt eine riesige Vielfalt an Spielen, mit Slots in modernem Look. Mit sofortigen Einzahlungen. Der Service ist einwandfrei. Der Prozess ist unkompliziert, gelegentlich zusatzliche Freispiele waren ein Bonus. Zum Schluss, Cat Spins Casino bietet ein einmaliges Erlebnis. Au?erdem die Oberflache ist benutzerfreundlich, zum Bleiben einladt. Ein starkes Feature die spannenden Community-Aktionen, die Gemeinschaft starken.
Loslegen|
What’s The Current Job Market For Best Automatic Vacuum Cleaner
Professionals? Best Automatic vacuum cleaner (http://www.metooo.es)
he has a good point
jupiter exchange
Je ne me lasse pas de Ruby Slots Casino, il cree une experience captivante. Le catalogue est un paradis pour les joueurs, offrant des experiences de casino en direct. 100% jusqu’a 500 € + tours gratuits. Le support est fiable et reactif. Les transactions sont toujours fiables, toutefois quelques tours gratuits en plus seraient geniaux. Globalement, Ruby Slots Casino est un immanquable pour les amateurs. En plus l’interface est lisse et agreable, ajoute une vibe electrisante. Un avantage notable les competitions regulieres pour plus de fun, garantit des paiements securises.
Continuer ici|
Je suis totalement conquis par Sugar Casino, on ressent une ambiance de fete. La bibliotheque est pleine de surprises, avec des slots aux graphismes modernes. Avec des depots fluides. Le support est efficace et amical. Les gains arrivent sans delai, par ailleurs plus de promos regulieres dynamiseraient le jeu. Globalement, Sugar Casino assure un divertissement non-stop. En plus le site est rapide et engageant, apporte une energie supplementaire. Particulierement attrayant les evenements communautaires dynamiques, renforce le lien communautaire.
Voir plus|
J’ai une passion debordante pour Ruby Slots Casino, ca transporte dans un monde d’excitation. La gamme est variee et attrayante, incluant des paris sportifs en direct. Avec des transactions rapides. Les agents sont rapides et pros. Les paiements sont securises et rapides, mais des offres plus genereuses rendraient l’experience meilleure. Pour finir, Ruby Slots Casino est un lieu de fun absolu. Ajoutons aussi la navigation est intuitive et lisse, permet une immersion complete. Egalement genial les tournois frequents pour l’adrenaline, propose des privileges personnalises.
Rejoindre maintenant|
Веб сайт https://urkarl.ru/
smarttradingmentor – The strategies make sense, easy to apply them in real trading setups.
A Step-By’-Step Guide For Robotic Hoover Robotic Hoovers
trendandstyle – The photos are accurate, items look exactly like what’s shown online.
brandonlangexperts – Expert consulting services with proven results and expertise.
brightmarketplace – This store has a fun energy, feels welcoming every time I visit.
shoplocaltrend – I come back often because the products change and stay exciting.
smartbuytoday – The checkout process was smooth, and my order arrived earlier than expected.
freshstylemarket – Customer service was super helpful when I had a question about sizing.
classytrendstore – Quick delivery and beautiful packaging, definitely ordering again soon.
bestdealcorner – I’ve ordered multiple times now, and the quality always stays consistent.
bestdealcorner – Great experience overall, site loads fast and checkout was totally hassle-free.
visionpartnersclub – Feels empowering overall, definitely a great resource for growing together.
discovergreatvalue – The product range here surprised me, covers everything from gadgets to clothes.
classyhomegoods – Prices are reasonable considering the premium quality and classy design.
freshfashionfinds – Love how trendy everything looks, the styles feel current and bold.
uniquefashionboutique – The pieces I found here are so different from regular stores, amazing.
What’s The Current Job Market For Good Robot Vacuum Cleaner Professionals Like?
Good Robot Vacuum Cleaner
brandonlangexperts – Expert consulting services with proven results and expertise.
Hi there, yup this article is really pleasant and I have learned lot of things from it concerning blogging. thanks.
https://legendslot.org/skachat-melbet-na-android-2025-obzor/
dailyprofitupdate – I visit every morning before trading, love the simplicity and speed.
See What Best Robotic Hoover Tricks The Celebs Are Using robotic hoover (https://scientific-programs.science/wiki/What_Makes_The_Robot_Vacuum_Cleaner_UK_So_Effective_For_COVID19)
The Best Robot Vacuum Cleaners Tricks To Make A Difference In Your Life Best robot vacuum cleaner
The Worst Advice We’ve Heard About Best Robot Hoover Best Robotic Vacuum Cleaner Uk
4 Dirty Little Secrets About Robot Mop And The Robot Mop
Industry Best robot Vacuum cleaner UK
mel bet mel bet .
BuildStrongRelationship – Ideas here have genuinely improved how I connect with others.
brandonlangexperts – Expert consulting services with proven results and expertise.
protraderacademy – I learned more here in a week than months elsewhere honestly amazing.
yourtradingmentor – Super informative and down-to-earth approach, definitely a site worth bookmarking.
brandonlangexperts – Expert consulting services with proven results and expertise.
See What Robot Vacuum Cleaners Uk Tricks The Celebs Are Using robot Vacuum cleaners
где купить диплом техникума свои где купить диплом техникума свои .
How To Create An Awesome Instagram Video About Mopping Robot automatic vacuum cleaners
brandonlangexperts – Expert consulting services with proven results and expertise.
Доставка пиццы в Туле https://pizzacuba.ru горячо и быстро. Классические и авторские рецепты, несколько размеров и бортики с сыром, добавки по вкусу. Онлайн-меню, акции «2 по цене 1», промокоды. Оплата картой/онлайн, бесконтактная доставка, трекинг заказа.
Energy Storage Systems https://e7repower.com from E7REPOWER: modular BESS for grid, commercial, and renewable energy applications. LFP batteries, bidirectional inverters, EMS, BMS, fire suppression. 10/20/40 ft containers, scalable to hundreds of MWh. Peak-saving, balancing, and backup. Engineering and service.
Thanks for some other excellent post. Where else could anybody get that type of info in such a perfect means of writing? I have a presentation next week, and I’m on the search for such info.
https://winner999.org/registratsiya-na-melbet-2025-bystro-i-prosto/
Robot Robotic Vacuum Cleaners Tips To Relax Your Everyday
Lifethe Only Robot Robotic Vacuum Cleaners Trick Every Individual Should Learn robot robotic vacuum cleaners
Guide To Auto Vacuum Cleaner: The Intermediate Guide On Auto Vacuum Cleaner Auto vacuum
Robot Vacuum And Cleaner Tools To Streamline Your Daily
Lifethe One Robot Vacuum And Cleaner Technique Every Person Needs To Be Able To Robot Vacuum And Cleaner [Sfenglishlessons.Com]
Moldova – rent-auto.md/ro/ – Inchiriere auto Chisinau – arenda masini fara stres, rezervare rapida si cele mai bune preturi.
brandonlangexperts – Expert consulting services with proven results and expertise.
forexstrategyguide – I like how they break down complex forex topics into easy, digestible lessons.
brahmanshome – Content is fresh, practical, and engaging for anyone working at home.
Je suis totalement envoute par Olympe Casino, il procure une experience harmonieuse. La selection de jeux est olympienne, avec des slots thematiques antiques. 100% jusqu’a 500 € + tours gratuits. L’assistance est efficace et sage, toujours pret a guider. Le processus est simple et glorieux, parfois quelques tours gratuits en plus seraient divins. En bref, Olympe Casino offre une experience legendaire pour ceux qui aiment parier en crypto ! De plus la plateforme est visuellement olympienne, amplifie le plaisir de jouer. Un atout olympien les options de paris sportifs variees, assure des transactions fiables.
https://olympefr.com/|
On the page https://fotoredaktor.top I found where Gambia is located in Africa.
everydaytrendshop – I like the clean design, makes shopping fast and easy every time.
yourtradingmentor – Love how this site simplifies complex trading ideas into practical, clear lessons.
Академия Алины Аблязовой https://ablyazovaschool.ru обучение реконструкции волос для мастеров и новичков. Авторские методики, разбор трихологических основ, отработка на моделях, кейсы клиентов. Онлайн и офлайн, сертификат, поддержка кураторов, материалы и чек-листы.
globalchoicehub – Found great deals here, prices are fair and quality is impressive.
teamworkinnovation – The content feels inspiring, packed with ideas for improving teamwork.
simplelivinghub – Perfect place to find thoughtful, clutter-free items for everyday living.
shopandshine – My order came quickly and looked exactly like what I expected, perfect.
teamworksuccesspath – The insights here are clear and relatable, perfect for any professional team.
successnetworkgroup – Perfect hub for entrepreneurs and teams working toward collective success goals.
uniquedecorstore – My order arrived quickly and was packaged perfectly, very impressed.
Guide To Robot Vacuum Cleaner With Mop: The Intermediate
Guide The Steps To Robot Vacuum Cleaner With Mop Robot Vacuum Cleaner With Mop
globalmarketinsight – Love how this site breaks down complex market trends into clear insights.
markettrendalerts – The layout is simple and clean, makes monitoring trends much faster.
successfultradersclub – Love how practical the trading advice is, easy to follow for beginners.
brandonlangexperts – Expert consulting services with proven results and expertise.
Ich bin ein gro?er Fan von Cat Spins Casino, es sorgt fur pure Unterhaltung. Es gibt eine beeindruckende Anzahl an Titeln, mit packenden Live-Casino-Optionen. Mit blitzschnellen Einzahlungen. Der Kundensupport ist top. Transaktionen sind zuverlassig und klar, allerdings mehr Bonusvielfalt ware ein Vorteil. Zum Schluss, Cat Spins Casino ist ein Muss fur Spieler. Ubrigens die Seite ist schnell und ansprechend, eine tiefe Immersion ermoglicht. Ein bemerkenswertes Feature die vielfaltigen Wettmoglichkeiten, die die Motivation erhohen.
Jetzt entdecken|
9 . What Your Parents Teach You About Automatic Vacuum Cleaners automatic vacuum cleaners (elearnportal.Science)
Ich bin vollig uberzeugt von Cat Spins Casino, es ist ein Ort voller Energie. Es gibt eine riesige Vielfalt an Spielen, mit Spielen, die Krypto unterstutzen. Der Willkommensbonus ist gro?zugig. Erreichbar rund um die Uhr. Die Zahlungen sind sicher und effizient, aber mehr Promo-Vielfalt ware toll. In Summe, Cat Spins Casino ist ein absolutes Highlight. Au?erdem die Plattform ist visuell beeindruckend, eine Prise Spannung hinzufugt. Ein besonders cooles Feature die breiten Sportwetten-Angebote, die die Community enger zusammenschwei?en.
Inhalt entdecken|
Je suis emerveille par Sugar Casino, on y trouve une energie contagieuse. Les titres proposes sont d’une richesse folle, incluant des paris sportifs pleins de vie. Le bonus de depart est top. Le support est efficace et amical. Le processus est clair et efficace, parfois des recompenses supplementaires dynamiseraient le tout. Pour conclure, Sugar Casino merite un detour palpitant. En bonus le site est rapide et style, ajoute une vibe electrisante. Particulierement attrayant les evenements communautaires vibrants, qui motive les joueurs.
Entrer|
Je suis totalement conquis par Ruby Slots Casino, ca transporte dans un monde d’excitation. Le catalogue de titres est vaste, incluant des paris sur des evenements sportifs. Il amplifie le plaisir des l’entree. Le service est disponible 24/7. Le processus est transparent et rapide, par moments plus de promos regulieres dynamiseraient le jeu. Pour finir, Ruby Slots Casino merite un detour palpitant. Pour ajouter l’interface est simple et engageante, donne envie de prolonger l’aventure. Un plus les evenements communautaires engageants, propose des privileges sur mesure.
AccГ©der au site|
Ich schatze die Energie bei Cat Spins Casino, es entfuhrt in eine Welt voller Nervenkitzel. Die Auswahl ist so gro? wie ein Casino-Floor, inklusive dynamischer Sportwetten. Der Bonus fur Neukunden ist attraktiv. Der Kundendienst ist hervorragend. Auszahlungen sind schnell und reibungslos, dennoch mehr Aktionen wurden das Erlebnis steigern. Abschlie?end, Cat Spins Casino bietet ein gro?artiges Erlebnis. Nebenbei die Seite ist schnell und einladend, was jede Session spannender macht. Ein weiteres Highlight sind die sicheren Krypto-Transaktionen, regelma?ige Boni bieten.
Seite ansehen|
5 Killer Quora Answers On Robot Vacuum Uk Robot Vacuum Uk
Je suis accro a Sugar Casino, ca invite a plonger dans le fun. La bibliotheque de jeux est captivante, incluant des paris sur des evenements sportifs. Avec des depots rapides et faciles. Le support client est irreprochable. Les gains sont transferes rapidement, par moments plus de promotions variees ajouteraient du fun. En conclusion, Sugar Casino assure un divertissement non-stop. Pour ajouter le design est tendance et accrocheur, ce qui rend chaque moment plus vibrant. A souligner les transactions en crypto fiables, qui booste la participation.
Visiter aujourd’hui|
learnandtrade – The strategy guides are clear and actionable, love how practical they feel.
Website https://tione.ru/ .
9 . What Your Parents Teach You About Robotic Hoover Best robotic vacuum cleaner uk
Je suis enthousiaste a propos de Ruby Slots Casino, il cree un monde de sensations fortes. La bibliotheque est pleine de surprises, comprenant des jeux optimises pour Bitcoin. 100% jusqu’a 500 € plus des tours gratuits. Le service d’assistance est au point. Le processus est transparent et rapide, malgre tout des recompenses additionnelles seraient ideales. Globalement, Ruby Slots Casino est un endroit qui electrise. A signaler l’interface est fluide comme une soiree, permet une immersion complete. Particulierement interessant les options variees pour les paris sportifs, assure des transactions fluides.
Explorer maintenant|
The 9 Things Your Parents Teach You About Best Robot Hoover best robot hoover
Je suis captive par Ruby Slots Casino, c’est un lieu ou l’adrenaline coule a flots. Il y a un eventail de titres captivants, comprenant des jeux optimises pour Bitcoin. Le bonus de bienvenue est genereux. Le support est efficace et amical. Les transactions sont toujours securisees, a l’occasion des recompenses en plus seraient un bonus. En somme, Ruby Slots Casino merite une visite dynamique. De plus le site est rapide et immersif, ajoute une touche de dynamisme. A mettre en avant les paiements securises en crypto, qui dynamise l’engagement.
Ouvrir le site|
brandonlangexperts – Expert consulting services with proven results and expertise.
Ich freue mich riesig uber Cat Spins Casino, es sorgt fur ein fesselndes Erlebnis. Das Spieleportfolio ist unglaublich breit, inklusive dynamischer Sportwetten. Mit blitzschnellen Einzahlungen. Der Support ist effizient und professionell. Der Prozess ist einfach und transparent, dennoch mehr Aktionen waren ein Gewinn. Kurz und bundig, Cat Spins Casino ist ein Muss fur Spielbegeisterte. Zudem ist das Design zeitgema? und attraktiv, eine Note von Eleganz hinzufugt. Ein weiteres Highlight die lebendigen Community-Events, die Gemeinschaft starken.
Mit dem Entdecken beginnen|
Ich schatze die Spannung bei Cat Spins Casino, es ist ein Ort voller Energie. Das Spieleangebot ist reichhaltig und vielfaltig, mit Spielautomaten in beeindruckenden Designs. Er sorgt fur einen starken Einstieg. Die Mitarbeiter sind immer hilfsbereit. Gewinne werden ohne Wartezeit uberwiesen, trotzdem ein paar Freispiele mehr waren super. Kurz und bundig, Cat Spins Casino ist ein Ort, der begeistert. Ubrigens die Seite ist schnell und einladend, eine Prise Spannung hinzufugt. Ein starkes Plus die regelma?igen Turniere fur Wettbewerbsspa?, die Gemeinschaft starken.
https://catspinscasinogames.de/|
Ich schatze die Energie bei Cat Spins Casino, es schafft eine mitrei?ende Stimmung. Das Angebot an Titeln ist riesig, mit dynamischen Wettmoglichkeiten. Er steigert das Spielvergnugen sofort. Der Service ist rund um die Uhr verfugbar. Der Prozess ist unkompliziert, manchmal ein paar Freispiele mehr waren super. Am Ende, Cat Spins Casino garantiert langanhaltenden Spa?. Hinzu kommt die Seite ist schnell und ansprechend, das Spielerlebnis bereichert. Ein attraktives Extra die dynamischen Community-Events, reibungslose Transaktionen sichern.
Nachsehen|
статьи про продвижение сайтов статьи про продвижение сайтов .
J’ai un veritable coup de c?ur pour Sugar Casino, c’est un lieu ou l’adrenaline coule a flots. Les titres proposes sont d’une richesse folle, offrant des tables live interactives. 100% jusqu’a 500 € avec des free spins. Le support est rapide et professionnel. Le processus est simple et transparent, parfois des offres plus importantes seraient super. En bref, Sugar Casino est une plateforme qui fait vibrer. Notons aussi la plateforme est visuellement dynamique, booste le fun du jeu. A noter les transactions crypto ultra-securisees, propose des privileges personnalises.
Apprendre les dГ©tails|
Je suis completement seduit par Ruby Slots Casino, il offre une experience dynamique. Le catalogue est un tresor de divertissements, proposant des jeux de table classiques. Il propulse votre jeu des le debut. Disponible a toute heure via chat ou email. Les transactions sont toujours fiables, parfois plus de promotions variees ajouteraient du fun. Pour conclure, Ruby Slots Casino offre une aventure memorable. Notons aussi le design est style et moderne, booste le fun du jeu. Egalement excellent les paiements securises en crypto, offre des recompenses regulieres.
DГ©couvrir le web|
Robot Vacuum And Cleaner Tools To Help You Manage Your Everyday Lifethe Only
Robot Vacuum And Cleaner Trick That Everyone Should
Learn robot vacuum And cleaner
J’adore la vibe de Sugar Casino, c’est un lieu ou l’adrenaline coule a flots. Les options de jeu sont infinies, avec des machines a sous aux themes varies. Avec des depots instantanes. Les agents sont rapides et pros. Le processus est fluide et intuitif, par ailleurs quelques free spins en plus seraient bienvenus. En somme, Sugar Casino merite une visite dynamique. A mentionner le site est rapide et engageant, facilite une immersion totale. Un atout les tournois reguliers pour la competition, qui motive les joueurs.
Commencer Г naviguer|
Je suis totalement conquis par Ruby Slots Casino, on y trouve une energie contagieuse. Les options de jeu sont incroyablement variees, proposant des jeux de table classiques. Il donne un avantage immediat. Le suivi est d’une fiabilite exemplaire. Les paiements sont securises et instantanes, malgre tout des recompenses additionnelles seraient ideales. Globalement, Ruby Slots Casino offre une experience inoubliable. Pour couronner le tout la plateforme est visuellement captivante, permet une immersion complete. Egalement super le programme VIP avec des privileges speciaux, assure des transactions fiables.
Jeter un coup d’œil|
Je suis bluffe par Sugar Casino, on y trouve une energie contagieuse. Les options de jeu sont incroyablement variees, avec des slots aux designs captivants. Il rend le debut de l’aventure palpitant. Disponible a toute heure via chat ou email. Le processus est fluide et intuitif, cependant quelques tours gratuits en plus seraient geniaux. Pour conclure, Sugar Casino garantit un amusement continu. Pour ajouter la navigation est intuitive et lisse, ajoute une vibe electrisante. Particulierement attrayant les evenements communautaires vibrants, assure des transactions fiables.
Savoir plus|
brandonlangexperts – Expert consulting services with proven results and expertise.
Robot Vacuum And Cleaner Tips To Relax Your Daily Life Robot
Vacuum And Cleaner Trick That Every Person Should Be Able To Robot Vacuum And Cleaner
pokies australia
Australia’s Top Pokies: Our Genuine Testing Results
Our team has spent many months testing the top online pokies in Australia. We’ve thoroughly evaluated each site, checking how fast they pay out, the actual value of their bonuses, their licensing, and how well they work on mobile devices.
Every site we list holds GCB accreditation under 96GROUP, which means they meet standards for fair play and responsible gambling.
Our Top Choices
Partner Top Offer Min Dep Payout Speed* Score
APP996 Up to AUD 2,000 match AUD 5 5–10 mins 5.0
OPAL96 6% weekly commission AUD 5 ~10 mins 4.9
VIVA96 110% welcome bonus AUD 5 ~10–15 mins 4.8
MM96 VIP rewards + missions AUD 5 ~15 mins 4.7
Processing time after KYC verification. Bank processing times may vary.
Our Discoveries
– APP996: Provides a 50% welcome bonus and a 0.96% rebate.
– OPAL96: Has over 5,000 games and is a newer platform.
– VIVA96: Supplies a 110% bonus, 17% daily reload, and an 8% win/loss rebate.
– MM96: Features up to a 100% welcome offer and daily missions.
Our Evaluation Method
We made genuine withdrawals to verify processing times, verified the validity of licenses and RNG fairness, examined the real bonus value after accounting for wagering requirements and withdrawal caps, tested the quality of their 24/7 support, and confirmed responsible gambling tools were available.
Mobile Performance
All these sites use Gialaitech’s mobile-suited platform:
– Play directly in your browser—no app needed
– Place the site to your home screen for quick access
– Has biometric login, works well with one hand, quick cashier (PayID, cards, e-wallets, crypto)
– Offers custom themes, session controls, and optional notifications for bonuses or payouts
Essential Information
These partners are GCB-licensed. Our ratings are our own opinion—any affiliate payments don’t influence our scores. All bonuses come with terms (wagering requirements, withdrawal caps, game restrictions). Must be 18 or older.
For gambling support: Gambling Help Online: 1800 858 858 or gamblinghelponline.org.au
Gamble responsibly. Know your limits.
paws21airbrushstudio – Their portfolio showcases a diverse range of impressive projects.
Website https://cardsfm.ru/ .
The 10 Most Scariest Things About Best Robotic Vacuum
Cleaners best robotic vacuum cleaners
Five Robot Cleaners Uk Projects For Any Budget Buy Robot Cleaner
9 . What Your Parents Taught You About Auto Vacuum Auto vacuum
Seo Backlinks
Backlinks for promotion are a very good tool.
Backlinks are important to Google’s crawlers, the more backlinks the better!
Robots see many links as links to your resource
and your site’s ranking goes up.
I have extensive experience in posting backlinks,
The forum database is always up to date as I have an efficient server and I do not rent remote servers, so my capabilities allow me to collect the forum database around the clock.
10 Meetups About Robotic Hoover You Should Attend robotic hoovers
kivurc – Love browsing this site, content is always practical and clear.
brandonlangexperts – Expert consulting services with proven results and expertise.
The One Buy Cleaning Robot Mistake Every Newbie Makes automatic dust robot
Website https://amurplanet.ru/ .
wooziewear – Really enjoy visiting, articles are short but informative every single time.
expandyourhorizon – I find their perspectives unique and refreshing, highly informative.
The Reason The Biggest “Myths” About Robot Vacuum Cleaner Could Actually Be Accurate best Robot vacuum Cleaners
inkorswimtattoocruise – Content is fresh, practical, and engaging for anyone working at home.
lotsofonlinepeople – The first impression is good, it feels authentic and approachable.
letter4reform – Their commitment to transparency and accountability is commendable.
chopchopgrubshop – Consistently great food and a welcoming environment every visit.
oldschoolopen – Content is fresh, practical, and engaging for anyone working at home.
zz-meta – Nice layout and colors, makes reading through everything really pleasant.
chopchopgrubshop – Always a pleasure to visit, never disappointed with the meals.
ieeb – A great resource for staying updated on current trends.
ieeb – The content is engaging and thought-provoking, keeps me coming back.
broodbase – The content is diverse and engaging, always something new to explore.
lastminute-corporate – Excellent customer support assists in resolving travel-related queries promptly.
kazhanmaster – The content is diverse and engaging, always something new to explore.
brandonlangexperts – Expert consulting services with proven results and expertise.
sjydtech – The brand seems credible, content aligns well with design style.
The 10 Scariest Things About Robot Vacuums & Mops Robot vacuums & mops
Автоматические выключатели
5 Auto Vacuum Myths You Should Stay Clear Of auto Vacuum cleaner
conorjmurphy – Site layout is clean, making it very easy to follow instructions.
brandonlangexperts – Expert consulting services with proven results and expertise.
happyshoppingplace – Fun and lively design, the name fits perfectly with the vibe.
What You Must Forget About How To Improve Your Best Automatic
Vacuum Cleaner Automatic Vacuum Cleaners
happyshoppingplace – Fun and lively design, the name fits perfectly with the vibe.
The 9 Things Your Parents Teach You About Robot Hoover
Uk robot Hoover uk
Guzellik dunyas?nda neler olup bittigini merak edenler icin ozel bir derleme haz?rlad?k.
Yeri gelmisken, eger En Son Moda Trendleri: S?kl?k ve Konfor ile ilgileniyorsan?z, buraya bir bak?n.
Asag?daki linke bakabilirsiniz:
https://turktekstil.com
Guzellik yolculugunuzda ilham alman?z dilegiyle!
Deneme Bonusu Veren Siteler 2025 listesi. Güvenilir siteler, yatırım d0n0m0 b0n0s0 v0r0n s0t0l0r şartsız deneme bonusu fırsatlarıyla en iyileri keşfedin.
The Most Hilarious Complaints We’ve Seen About Automatic
Vacuum automatic vacuum cleaner (pad.Geolab.space)
staycuriousdiscover – Inspiring tone, layout encourages creativity and exploration beautifully.
styleforliving – Customer support details seem accessible which adds trust to the site.
Ich bin beeindruckt von der Qualitat bei Cat Spins Casino, es bietet ein immersives Erlebnis. Es gibt unzahlige packende Spiele, mit spannenden Sportwetten-Angeboten. Mit blitzschnellen Einzahlungen. Die Mitarbeiter sind schnell und kompetent. Transaktionen sind zuverlassig und klar, allerdings mehr Bonusangebote waren ideal. Insgesamt, Cat Spins Casino ist ein absolutes Highlight. Au?erdem die Oberflache ist glatt und benutzerfreundlich, zum Bleiben einladt. Ein weiteres Highlight ist das VIP-Programm mit besonderen Vorteilen, die Teilnahme fordern.
http://www.catspinsonline.de|
buildabetterworld – Navigation is smooth, page loads fast, user experience is solid.
Kendi tarz?n?za uygun yeni guzellik trendleri ar?yorsan?z, dogru yerdesiniz.
“Sagl?kl? Beslenme ve Kulturel Lezzetler Kesfi” konusuyla ilgili olarak harika bir makale var.
Asag?daki linke bakabilirsiniz:
https://tarifkasif.com
Umar?z bu trendler, tarz?n?za yeni bir soluk getirir.
Ich bin ganz hin und weg von Cat Spins Casino, es begeistert mit Dynamik. Es gibt zahlreiche spannende Spiele, mit eleganten Tischspielen. 100 % bis zu 500 € mit Freispielen. Die Mitarbeiter sind immer hilfsbereit. Auszahlungen sind zugig und unkompliziert, manchmal mehr Bonusoptionen waren top. Abschlie?end, Cat Spins Casino ist eine Plattform, die uberzeugt. Hinzu kommt ist das Design stilvoll und einladend, eine tiefe Immersion ermoglicht. Ein klasse Bonus ist das VIP-Programm mit einzigartigen Belohnungen, die die Begeisterung steigern.
Nachsehen|
Ich bin suchtig nach Cat Spins Casino, es entfuhrt in eine Welt voller Spa?. Das Angebot ist ein Paradies fur Spieler, mit Spielautomaten in beeindruckenden Designs. Er gibt Ihnen einen tollen Boost. Der Kundendienst ist hervorragend. Der Prozess ist unkompliziert, aber haufigere Promos wurden begeistern. Letztlich, Cat Spins Casino ist ein Ort fur pure Unterhaltung. Au?erdem ist das Design stilvoll und modern, eine vollstandige Eintauchen ermoglicht. Ein starkes Feature ist das VIP-Programm mit tollen Privilegien, sichere Zahlungen garantieren.
Jetzt ausprobieren|
автоматы 7к автоматы 7к имеют разнообразные темы и интересные механики, что делает их привлекательными.
everydaystylecorner – Friendly layout and easy to navigate—makes browsing enjoyable.
Ich bin fasziniert von Cat Spins Casino, es sorgt fur pure Unterhaltung. Es gibt eine Fulle an aufregenden Titeln, mit eleganten Tischspielen. 100 % bis zu 500 € und Freispiele. Der Kundendienst ist hervorragend. Der Prozess ist klar und effizient, jedoch regelma?igere Promos wurden das Spiel aufwerten. Insgesamt, Cat Spins Casino bietet ein unvergleichliches Erlebnis. Au?erdem die Oberflache ist benutzerfreundlich, eine Prise Spannung hinzufugt. Ein gro?artiges Bonus die dynamischen Community-Veranstaltungen, die die Motivation erhohen.
Seite erkunden|
5 Killer Quora Answers To Robot Hoover And Mop robot hoover and mop
exploreendlessideas – Modern look, design sparks imagination and a sense of wonder.
Ich bin ein gro?er Fan von Cat Spins Casino, es ist ein Ort voller Energie. Es gibt unzahlige packende Spiele, mit Krypto-freundlichen Titeln. Der Willkommensbonus ist gro?zugig. Erreichbar 24/7 per Chat oder E-Mail. Gewinne werden schnell uberwiesen, in manchen Fallen zusatzliche Freispiele waren ein Bonus. Kurz und bundig, Cat Spins Casino ist definitiv einen Besuch wert. Au?erdem die Navigation ist intuitiv und einfach, zum Weiterspielen animiert. Ein gro?artiges Bonus die zahlreichen Sportwetten-Moglichkeiten, die die Community enger zusammenschwei?en.
Hier starten|
You’ll Never Be Able To Figure Out This Robot Mop Uk’s Tricks Robot Mop uk
makelifesimpler – This site helped me streamline daily tasks and feel calmer.
Ich liebe das Flair von Cat Spins Casino, es verspricht pure Spannung. Die Auswahl ist so gro? wie ein Casino-Floor, mit stilvollen Tischspielen. Der Willkommensbonus ist gro?zugig. Der Service ist absolut zuverlassig. Der Prozess ist einfach und transparent, in seltenen Fallen waren mehr Bonusvarianten ein Plus. Kurz und bundig, Cat Spins Casino sorgt fur kontinuierlichen Spa?. Zudem die Seite ist schnell und ansprechend, zum Weiterspielen animiert. Ein tolles Feature die breiten Sportwetten-Angebote, exklusive Boni bieten.
Mehr lesen|
J’ai une affection particuliere pour Sugar Casino, il propose une aventure palpitante. On trouve une profusion de jeux palpitants, offrant des sessions live palpitantes. Avec des transactions rapides. Disponible a toute heure via chat ou email. Les retraits sont fluides et rapides, toutefois quelques tours gratuits supplementaires seraient cool. En bref, Sugar Casino merite un detour palpitant. En complement le site est rapide et style, apporte une energie supplementaire. Egalement super les transactions en crypto fiables, garantit des paiements securises.
Essayer|
J’adore l’ambiance electrisante de Ruby Slots Casino, il offre une experience dynamique. La gamme est variee et attrayante, incluant des paris sportifs en direct. Il amplifie le plaisir des l’entree. Le suivi est impeccable. Les paiements sont surs et efficaces, par contre des recompenses supplementaires seraient parfaites. Au final, Ruby Slots Casino est un incontournable pour les joueurs. De surcroit le design est style et moderne, apporte une energie supplementaire. A signaler les options variees pour les paris sportifs, qui motive les joueurs.
DГ©couvrir la page|
15 Gifts For Your Best Robot Cleaner Lover In Your Life
Robot Vacuum Cleaners
yourcreativejourney – I found browsing here relaxing and discovered a few favorites.
J’adore l’ambiance electrisante de Ruby Slots Casino, il procure une sensation de frisson. Le catalogue est un paradis pour les joueurs, avec des machines a sous visuellement superbes. Il donne un avantage immediat. Les agents repondent avec efficacite. Le processus est fluide et intuitif, cependant plus de promos regulieres dynamiseraient le jeu. En bref, Ruby Slots Casino offre une experience inoubliable. Pour ajouter la plateforme est visuellement dynamique, incite a prolonger le plaisir. Egalement genial les tournois frequents pour l’adrenaline, offre des bonus constants.
Cliquer pour voir|
J’ai un faible pour Sugar Casino, il cree un monde de sensations fortes. Les jeux proposes sont d’une diversite folle, offrant des experiences de casino en direct. Le bonus de depart est top. Le suivi est impeccable. Les gains arrivent sans delai, par contre des bonus plus varies seraient un plus. Pour finir, Sugar Casino merite un detour palpitant. De plus la navigation est fluide et facile, apporte une energie supplementaire. A mettre en avant les options de paris sportifs variees, assure des transactions fiables.
Rejoindre maintenant|
Tarz?n?z? 90’lar?n unutulmaz modas?ndan esinlenerek gunumuze tas?mak ister misiniz? Oyleyse bu yaz?m?z tam size gore!
Для тех, кто ищет информацию по теме “Ev Dekorasyonunda Modern ve Estetik Cozumler”, есть отличная статья.
Вот, можете почитать:
https://evimturk.com
90’lar?n guzellik s?rlar?yla tarz?n?za yeni bir soluk kazand?rabilirsiniz. Eski moda, yeni size ilham olsun!
Ich bin total hingerissen von Cat Spins Casino, es bietet ein mitrei?endes Spielerlebnis. Das Angebot ist ein Paradies fur Spieler, mit traditionellen Tischspielen. Er bietet einen tollen Startvorteil. Der Service ist einwandfrei. Transaktionen sind zuverlassig und effizient, ab und zu mehr Bonusvielfalt ware ein Vorteil. Am Ende, Cat Spins Casino ist ein Muss fur Spieler. Zudem die Benutzeroberflache ist klar und flussig, eine tiefe Immersion ermoglicht. Ein gro?es Plus die haufigen Turniere fur mehr Spa?, regelma?ige Boni bieten.
Webseite besuchen|
Ich bin fasziniert von Cat Spins Casino, es schafft eine elektrisierende Atmosphare. Die Spiele sind abwechslungsreich und fesselnd, mit stilvollen Tischspielen. Der Willkommensbonus ist gro?zugig. Der Kundensupport ist top. Auszahlungen sind einfach und schnell, dennoch ein paar zusatzliche Freispiele waren klasse. Abschlie?end, Cat Spins Casino bietet ein unvergleichliches Erlebnis. Au?erdem die Navigation ist klar und flussig, einen Hauch von Eleganz hinzufugt. Ein attraktives Extra die regelma?igen Wettbewerbe fur Spannung, das die Motivation steigert.
Mehr entdecken|
ЛідерUA – інформативний портал https://liderua.com новин та корисних порад: актуальні події України, аналітика, життєві лайфхаки та експертні рекомендації. Все — щоб бути в курсі й отримувати практичні рішення для щоденного життя та розвитку.
Ich schatze die Energie bei Cat Spins Casino, es verspricht pure Spannung. Es gibt eine enorme Vielfalt an Spielen, mit Slots in modernem Look. Er macht den Start aufregend. Erreichbar rund um die Uhr. Gewinne werden ohne Wartezeit uberwiesen, jedoch regelma?igere Promos wurden das Spiel aufwerten. Im Gro?en und Ganzen, Cat Spins Casino bietet ein unvergleichliches Erlebnis. Au?erdem ist das Design stilvoll und modern, das Vergnugen maximiert. Ein besonders cooles Feature sind die schnellen Krypto-Transaktionen, kontinuierliche Belohnungen bieten.
Website navigieren|
купить диплом в казани купить диплом в казани .
discoverandcreate – Balanced visuals, message promotes creativity and curiosity together.
Ich liebe die Atmosphare bei Cat Spins Casino, es entfuhrt in eine Welt voller Nervenkitzel. Es gibt eine Fulle an aufregenden Titeln, mit Spielen fur Kryptowahrungen. Er steigert das Spielvergnugen sofort. Der Support ist professionell und schnell. Die Zahlungen sind sicher und zuverlassig, trotzdem mehr Aktionen waren ein Gewinn. In Summe, Cat Spins Casino ist ein Muss fur Spieler. Daruber hinaus die Oberflache ist glatt und benutzerfreundlich, was jede Session spannender macht. Ein klasse Bonus die zahlreichen Sportwetten-Moglichkeiten, sichere Zahlungen garantieren.
Hier starten|
Главное у нас: https://journal-ua.com/biznes-i-ekonomika/bas-kup-i-bas-erp-yakij-produkt-efektivnishij-dlya-biznesu.html
J’ai un faible pour Sugar Casino, il cree une experience captivante. La bibliotheque de jeux est captivante, avec des machines a sous visuellement superbes. Il offre un demarrage en fanfare. Les agents repondent avec efficacite. Les transactions sont toujours fiables, quelquefois des recompenses supplementaires dynamiseraient le tout. Pour finir, Sugar Casino est un lieu de fun absolu. Pour completer la navigation est simple et intuitive, booste l’excitation du jeu. A souligner les tournois reguliers pour s’amuser, offre des bonus constants.
http://www.sugarcasinobonus777fr.com|
Je suis epate par Ruby Slots Casino, on y trouve une vibe envoutante. Le catalogue de titres est vaste, avec des slots aux graphismes modernes. Il donne un avantage immediat. Le service d’assistance est au point. Les transactions sont toujours fiables, malgre tout des offres plus genereuses seraient top. Pour finir, Ruby Slots Casino est une plateforme qui pulse. En extra le site est rapide et immersif, ce qui rend chaque partie plus fun. Un element fort les evenements communautaires vibrants, renforce la communaute.
Lire plus|
J’adore le dynamisme de Sugar Casino, on ressent une ambiance de fete. Le choix est aussi large qu’un festival, avec des slots aux graphismes modernes. Le bonus initial est super. Les agents repondent avec rapidite. Les paiements sont surs et fluides, cependant quelques tours gratuits en plus seraient geniaux. Dans l’ensemble, Sugar Casino merite un detour palpitant. Ajoutons que le design est moderne et attrayant, permet une immersion complete. Un atout les tournois reguliers pour la competition, garantit des paiements rapides.
https://sugarcasino777fr.com/|
Je suis emerveille par Ruby Slots Casino, on ressent une ambiance de fete. Il y a un eventail de titres captivants, comprenant des jeux crypto-friendly. Il booste votre aventure des le depart. Le support est fiable et reactif. Les paiements sont securises et instantanes, mais plus de promotions frequentes boosteraient l’experience. En resume, Ruby Slots Casino offre une experience hors du commun. Pour couronner le tout le site est rapide et engageant, permet une plongee totale dans le jeu. Particulierement cool les competitions regulieres pour plus de fun, qui stimule l’engagement.
Commencer Г dГ©couvrir|
J’ai un veritable coup de c?ur pour Sugar Casino, ca donne une vibe electrisante. La bibliotheque est pleine de surprises, incluant des paris sur des evenements sportifs. Il offre un demarrage en fanfare. Disponible 24/7 par chat ou email. Les gains sont transferes rapidement, neanmoins des recompenses supplementaires seraient parfaites. Pour conclure, Sugar Casino garantit un plaisir constant. En bonus l’interface est intuitive et fluide, facilite une experience immersive. Un atout les options de paris sportifs diversifiees, renforce le lien communautaire.
Lire les dГ©tails|
How To Know If You’re All Set To Robot Cleaners Uk Buy Robot Cleaner
The 9 Things Your Parents Teach You About Car Flip Key Repair Flip Key repair
buildabetterworld – Uplifting concept, site feels full of purpose and positivity.
Топ 10 казино
The 10 Scariest Things About Automatic Hoover Uk Automatic Hoover
Курсы маникюра https://econogti-school.ru и педикюра с нуля: теория + практика на моделях, стерилизация, архитектура ногтя, комбинированный/аппаратный маникюр, выравнивание, покрытие гель-лаком, классический и аппаратный педикюр. Малые группы, материалы включены, сертификат и помощь с трудоустройством.
Авторский MINI TATTOO https://kurs-mini-tattoo.ru дизайн маленьких тату, баланс и масштаб, безопасная стерилизация, грамотная анестезия, техника fine line и dotwork. Практика, разбор типовых косяков, правила ухода, фото/видео-съёмка работ. Материалы включены, сертификат и поддержка сообщества.
changan cs35 https://changan-v-spb.ru
changeyourdirection – The motto “change your direction” resonates—nice branding and positive message.
growwithconfidence – Found some resources that seem genuinely helpful for personal growth.
urbanwearstudio – Trendy and sharp, captures streetwear energy in a polished way.
uniquelifestylehub – Checkout appeared straightforward and payment options were clearly displayed.
getinspireddaily – The product descriptions are clear and the theme is genuinely uplifting.
globalstylemarket – Product descriptions are clear and navigation between categories is smooth.
connectlearncreate – So far a good first impression—looking forward to seeing how it evolves.
fashionloverszone – Found several items I like; browsing was enjoyable and smooth.
exploreandcreate – Customer support information seems accessible which adds confidence.
Play The Password Game online in Canada! Test your creativity and problem-solving skills as you craft secure passwords with fun, unique challenges. Perfect for puzzle enthusiasts: Password Game strategies to win
The 10 Most Scariest Things About Robot Vacuums & Mops Robot Vacuums & Mops
modernlivingstore – Checkout appears straightforward and payment options are visible and well-laid-out.
лучшие локации для фото в москве предлагают высококачественные услуги для создания незабываемых фотографий.
с помощью мастерского прикосновения. Лучшие фотографы Москвы могут передать всю глубину и богатство эмоций через свои снимки . Фотография – это не просто хобби или профессия, это forme искусства, которое может быть использовано для различных целей .
Фотографы Москвы имеют уникальную возможность запечатлеть красоту этого великого города . Они могут создать по-настоящему уникальные и художественные изображения. Лучшие фотографы Москвы могут использовать различные техники, чтобы создать интересные эффекты .
Технологии и оборудование играют важную роль в фотографии могут быть использованы для улучшения качества фотографий. Лучшие фотографы Москвы знают, как использовать современное оборудование . Они могут создавать по-настоящему уникальные и художественные изображения с помощью своих навыков .
Фотографы Москвы могут выбрать лучшее оборудование для своих нужд . Они могут использовать различные техники, чтобы добиться желаемого эффекта . Лучшие фотографы Москвы имеют свой собственный подход к фотографии.
Художественный аспект фотографии позволяет фотографам выражать себя и свои мысли . Лучшие фотографы Москвы имеют глубокое понимание того, как работает художественный аспект. Они могут экспериментировать с разными стилями и жанрами .
Фотографы Москвы могут использовать различные программы и приложения для редактирования фотографий . Они могут создавать по-настоящему уникальные и художественные изображения с помощью своих навыков и оборудования . Лучшие фотографы Москвы могут экспериментировать с разными техниками и стилями .
В заключении фотография – это способ выразить себя и свои мысли . Лучшие фотографы Москвы знают, как использовать фотографию, чтобы создать по-настоящему уникальные и художественные изображения . Они могут снять портреты известных людей .
Фотография – это forme искусства, которое может быть использовано для различных целей . Лучшие фотографы Москвы имеют свой собственный стиль и подход к фотографии. Они могут использовать различные программы и приложения для редактирования фотографий .
shopwithstylehub – A wide variety of items caught my eye, looks promising.
connectwithideas – I’ll bookmark this site for later when I’m ready to explore more.
findjoytoday – Customer support/contact info appears accessible, which adds confidence in using the store.
makeimpacttoday – I’ll bookmark this shop for future visits when I’m ready to shop.
dreambuyoutlet – Found some interesting products that caught my eye viewing just a few pages.
Guzellik ve kozmetikte her zaman gecmisten al?nacak dersler bulunur. 90’lar?n modas?ndan guzellik s?rlar?n? kesfetmeye haz?r olun.
Кстати, если вас интересует Ev Dekorasyonunda S?kl?k ve Fonksiyonellik, загляните сюда.
Смотрите сами:
https://evimsicak.com
Tarz?n?zda 90’lar?n esintilerini hissetmeye baslad?g?n?za eminim. Gecmisin izlerini tas?maktan korkmay?n!
kraken сайт Kraken сайт – это зеркало цифровой эпохи, отражающее как светлые, так и темные её стороны. Это территория, где стираются границы между реальностью и иллюзией, где власть обретает анонимность, а свобода граничит с опасностью. Здесь царят свои законы и правила, требующие от каждого участника не только осведомленности, но и ответственности за свои действия. Погружение в этот мир требует хладнокровия, осторожности и умения видеть за заманчивыми предложениями потенциальные риски.
Galera, resolvi contar como foi no 4PlayBet Casino porque foi muito alem do que imaginei. A variedade de jogos e simplesmente incrivel: jogos ao vivo imersivos, todos com graficos de primeira. O suporte foi eficiente, responderam em minutos pelo chat, algo que passa seguranca. Fiz saque em transferencia e o dinheiro entrou muito rapido, ponto fortissimo. Se tivesse que criticar, diria que senti falta de ofertas recorrentes, mas isso nao estraga a experiencia. No geral, o 4PlayBet Casino vale demais a pena. Recomendo sem medo.
oe wheels 4play satin wheels|
discoveryourpotential – I’ll keep this site in mind if I’m ready to level up.
The 12 Most Popular Robotic Hoover Accounts To Follow On Twitter Robotic hoover And mop
I’m blown away by Pinco, it’s packed with winning potential. The options stretch as far as the eye can see, with slot machines in fresh themes. It gives you an instant edge. Support is dependable and helpful. Withdrawals are fast and smooth, still more bonus types would keep it fresh. Generally speaking, Pinco is a platform that rocks. Also the interface is simple and powerful, heightens the adrenaline. Also outstanding are the regular contests for thrill, that provides custom perks.
Go online|
Je suis accro a Ruby Slots Casino, ca offre un plaisir vibrant. La selection de jeux est impressionnante, avec des slots aux graphismes modernes. Il amplifie le plaisir des l’entree. Le suivi est toujours au top. Les transactions sont d’une fiabilite absolue, de temps en temps des bonus diversifies seraient un atout. Pour conclure, Ruby Slots Casino est une plateforme qui pulse. En plus la plateforme est visuellement electrisante, incite a rester plus longtemps. A noter le programme VIP avec des avantages uniques, garantit des paiements securises.
Visiter pour plus|
Je suis fascine par Sugar Casino, ca offre un plaisir vibrant. Les options sont aussi vastes qu’un horizon, incluant des paris sportifs en direct. Le bonus d’inscription est attrayant. Le service client est de qualite. Le processus est fluide et intuitif, malgre tout plus de promotions variees ajouteraient du fun. En fin de compte, Sugar Casino est une plateforme qui pulse. Pour ajouter la plateforme est visuellement captivante, donne envie de continuer l’aventure. Particulierement interessant les tournois reguliers pour s’amuser, propose des avantages sur mesure.
Naviguer sur le site|
discoveramazingthings – Exciting name, visuals and content give a sense of adventure.
Je suis completement seduit par Sugar Casino, ca pulse comme une soiree animee. On trouve une profusion de jeux palpitants, incluant des paris sportifs pleins de vie. Il donne un elan excitant. Disponible a toute heure via chat ou email. Les gains arrivent sans delai, bien que des recompenses supplementaires dynamiseraient le tout. En somme, Sugar Casino est un choix parfait pour les joueurs. Ajoutons aussi le site est fluide et attractif, ajoute une vibe electrisante. Un point fort les evenements communautaires pleins d’energie, garantit des paiements rapides.
Explorer plus|
See What Automatic Vacuum Cleaner Uk Tricks The Celebs Are Using
automatic vacuum cleaner uk
7k casino вход 7k casino регистрация не занимает много времени, что позволяет мгновенно начать игру.
explorewithpassion – Creative tone, design reflects motivation and energetic discovery.
Онлайн-блог https://intellector-school.ru о нейросетях: от базовой линейной алгебры до Transformer и LLM. Пошаговые проекты, код на Git-стиле, эксперименты, метрики, тюнинг гиперпараметров, ускорение на GPU. Обзоры курсов, книг и инструментов, подборка задач для практики и подготовки к интервью.
Освойте режиссуру https://rasputinacademy.ru событий и маркетинг: концепция, сценарий, сцена и свет, звук, видео, интерактив. Бюджет и смета, закупки, подрядчики, тайминг, риск-менеджмент. Коммьюнити, PR, лидогенерация, спонсорские пакеты, метрики ROI/ROMI. Практические задания и шаблоны документов.
smartshoppinghub – Clean and practical, ideal for modern online shoppers and deals.
modernhomefinds – Customer support/contact info seems accessible, which helps build trust.
Guzellik ve kozmetikte her zaman gecmisten al?nacak dersler bulunur. 90’lar?n modas?ndan guzellik s?rlar?n? kesfetmeye haz?r olun.
По теме “Ev Dekorasyonunda S?kl?k ve Fonksiyonellik”, есть отличная статья.
Смотрите сами:
https://evimsicak.com
90’lar modas?n?n guzellik s?rlar?n? kesfetmek, tarz?n?za farkl? bir boyut kazand?rabilir. Denemeye deger degil mi?
findyourdreamplace – Navigation between categories is smooth; browsing feels easy and pleasant.
discoveramazingoffers.shop – Totally recommend it, discovered some items I didn’t know existed.
The 10 Most Scariest Things About Automatic Hoover Uk automatic hoover [http://autocela.lv/user/oysteragenda21]
20 Best Tweets Of All Time About Robotic Hoover robotic Hoover and mop
discovernewthings – Bright visuals and curious tone make this site engaging.
urbanwearstudio – The site has a sleek vibe; good variety of urban-style apparel.
Cheap Robot Hoover Tools To Help You Manage Your Everyday Lifethe Only Cheap Robot Hoover Trick That Everybody
Should Know cheap robot Hoover
imaginelearnexplore – Customer support or contact info appears accessible, which adds trust.
Five Killer Quora Answers On Robotic Hoover Robotic hoover
discoverandcreate – Customer support/contact info is visible which adds confidence in the experience.
thebestpick – Clear branding, every detail feels user-friendly and neatly arranged.
yourmomenttoshine – Pricing and selection look reasonable; hoping product quality and service match.
5 Common Myths About Best Robot Vacuums Uk You Should Stay Clear
Of robotic Cleaner
changeyourperspective.click – Love how this site challenges my mindset in refreshing ways today.
createyourfuture.click – Inspiring site overall, helps me stay motivated toward long-term goals.
10 Situations When You’ll Need To Learn About Vacuum Cleaner Robot smart cleaning Device
90’lar modas?n?n guzellik s?rlar?yla gunumuzun trendlerine meydan okumaya ne dersiniz?
Для тех, кто ищет информацию по теме “Ev Dekorasyonunda S?kl?k ve Fonksiyonellik”, там просто кладезь информации.
Вот, можете почитать:
https://evimsicak.com
Nostalji dolu bu yolculukta bizimle oldugunuz icin tesekkur ederiz. 90’lar modas? ve guzelliginin ruhunu hissedin.
Clicking Here https://web-breadwallet.com
modernhomefinds.click – Love the stylish home ideas here, everything feels fresh and cozy.
3 Common Causes For Why Your Automatic Vacuum Cleaners
Isn’t Working (And How To Fix It) Robot Vacuum Machine
findyourmoments.click – Inspiring site overall, encourages living with presence and calm awareness.
findjoyeveryday.shop – Great selection of uplifting items, makes every purchase feel special.
yourdailyshoppinghub.shop – Prices are awesome, totally my go-to place for online deals.
changeyourperspective – So far pricing looks fair; will keep an eye on product quality and delivery.
Five Killer Quora Answers To Robot Vacuum Uk Robot Vacuum Uk
classyfindsonline.shop – Found some beautiful accessories, perfect balance between style and price.
trendinghomeideas.shop – Love the minimalist style, makes redecorating feel easy and affordable.
buildsomethingnew.shop – Love how organized the site feels, makes browsing projects enjoyable.
simplevalueplace.shop – Impressed by how affordable yet reliable everything turned out here.
startanewjourney.shop – Love how peaceful the design feels, very calming and thoughtful.
trendingstyleworld.shop – Love the latest trends here, everything looks so stylish and fresh.
smartfashionboutique.shop – Prices are fair, and the overall vibe feels high-end.
modernlivingtrend.shop – The decor trends here always inspire me to redecorate my space.
findyourpathnow.shop – Great community energy here, feels supportive and genuinely positive always.
staycuriousdiscover.shop – Amazing platform, helps me explore new perspectives every single day.
yourmomentstarts.click – Great energy here, helps me feel confident about every new start.
modernlivingstore.click – Great prices for the quality, delivery came faster than expected too.
modernhomefinds.click – Love the stylish home ideas here, everything feels fresh and cozy.
createyourfuture.click – Inspiring site overall, helps me stay motivated toward long-term goals.
click resources https://toast-wallet.net
changeyourperspective.click – Love how this site challenges my mindset in refreshing ways today.
Курсы по наращиванию https://schoollegoart.ru ресниц, архитектуре и ламинированию бровей/ресниц с нуля: теория + практика на моделях, стерильность, карта бровей, классика/2D–4D, составы и противопоказания. Материалы включены, мини-группы, сертификат, чек-листы и помощь с портфолио и стартом продаж.
The Best Automatic Vacuum Cleaner And Mop Tricks To Change Your Life best Automatic vacuum Cleaner
PRP-курс для косметологов обучение прп-терапии доказательная база, отбор пациентов, подготовка образца, техники введения (лицо, шея, кожа головы), сочетание с мезо/микронидлингом. Практика, рекомендации по фото/видео-фиксации, юридические формы, маркетинг услуги. Сертификат и кураторство.
freshfashioncorner.shop – Everything feels fresh and current, really love their seasonal collections.
Galera, vim dividir minhas impressoes no 4PlayBet Casino porque me pegou de surpresa. A variedade de jogos e simplesmente incrivel: jogos ao vivo imersivos, todos rodando lisos. O suporte foi bem prestativo, responderam em minutos pelo chat, algo que vale elogio. Fiz saque em PIX e o dinheiro entrou muito rapido, ponto fortissimo. Se tivesse que criticar, diria que senti falta de ofertas recorrentes, mas isso nao estraga a experiencia. No geral, o 4PlayBet Casino me conquistou. Eu ja voltei varias vezes.
4play 4p80|
discoveryourpotential.click – Great platform for personal growth, love the positive and uplifting tone.
Ich habe einen totalen Hang zu SpinBetter Casino, es bietet einen einzigartigen Kick. Der Katalog ist reichhaltig und variiert, mit immersiven Live-Sessions. Die Agenten sind blitzschnell, bietet klare Losungen. Die Auszahlungen sind ultraschnell, obwohl zusatzliche Freispiele waren ein Highlight. Global gesehen, SpinBetter Casino bietet unvergessliche Momente fur Adrenalin-Sucher ! Hinzu kommt das Design ist ansprechend und nutzerfreundlich, fugt Magie hinzu. Besonders toll die schnellen Einzahlungen, die Flexibilitat bieten.
spinbettercasino.de|
Website https://fishexpo-volga.ru/ .
Ich freue mich riesig uber Cat Spins Casino, es bietet packende Unterhaltung. Das Angebot an Titeln ist riesig, mit aufregenden Live-Casino-Erlebnissen. Mit schnellen Einzahlungen. Der Service ist von hochster Qualitat. Auszahlungen sind schnell und reibungslos, dennoch gro?ere Boni waren ideal. In Summe, Cat Spins Casino bietet ein unvergessliches Erlebnis. Daruber hinaus die Seite ist schnell und einladend, eine tiefe Immersion ermoglicht. Ein wichtiger Vorteil ist das VIP-Programm mit besonderen Vorteilen, zuverlassige Transaktionen sichern.
Webseite besuchen|
I’ve got a soft spot for Pinco, it’s a platform that never sleeps. There’s an insane range of games, including live sports betting action. With instant, hassle-free deposits. Support is pro and proactive. Cashouts are lightning-fast, on occasion bigger promotions would be epic. In conclusion, Pinco is perfect for casino enthusiasts. Moreover the design is sleek and modern, adds electric energy. A bonus perk are the fast crypto transactions, that builds a strong community.
Enter|
Je suis enthousiaste a propos de Ruby Slots Casino, c’est une plateforme qui deborde de dynamisme. La variete des jeux est epoustouflante, offrant des tables live interactives. Le bonus d’inscription est attrayant. Le support est efficace et amical. Le processus est clair et efficace, malgre tout des bonus plus varies seraient un plus. En resume, Ruby Slots Casino est un choix parfait pour les joueurs. Notons aussi le design est moderne et attrayant, donne envie de continuer l’aventure. Egalement genial les nombreuses options de paris sportifs, qui booste la participation.
Poursuivre la lecture|
Je suis captive par Sugar Casino, il cree un monde de sensations fortes. La selection est riche et diversifiee, incluant des options de paris sportifs dynamiques. Avec des transactions rapides. Disponible 24/7 par chat ou email. Les transactions sont toujours fiables, quelquefois des offres plus genereuses rendraient l’experience meilleure. Globalement, Sugar Casino assure un fun constant. En complement la navigation est simple et intuitive, ce qui rend chaque partie plus fun. Egalement top les competitions regulieres pour plus de fun, propose des privileges personnalises.
Explorer la page|
Je suis epate par Sugar Casino, ca invite a plonger dans le fun. Le choix de jeux est tout simplement enorme, proposant des jeux de table classiques. 100% jusqu’a 500 € avec des free spins. Les agents repondent avec efficacite. Les transactions sont toujours fiables, bien que quelques tours gratuits supplementaires seraient cool. Pour finir, Sugar Casino est un endroit qui electrise. En complement le design est tendance et accrocheur, apporte une touche d’excitation. Egalement top les evenements communautaires pleins d’energie, renforce le lien communautaire.
Tout apprendre|
findsomethinggreat.click – Great place to browse, always end up discovering something unexpectedly cool.
Sizi gecmisten ilham alan guzellik ipuclar?yla dolu bu nostaljik yolculuga davet ediyoruz. 90’lar modas?n?n s?rlar?na goz atal?m m??
Кстати, если вас интересует Guzellik ve Kozmetik: Trendler ve Ipuclar?, загляните сюда.
Ссылка ниже:
https://guzellikturk.com
Tarz?n?zda 90’lar?n esintilerini hissetmeye baslad?g?n?za eminim. Gecmisin izlerini tas?maktan korkmay?n!
yourmomentstarts.shop – Great vibe overall, helps me feel inspired and ready for goals.
classychoiceoutlet.click – Stylish collection overall, love the elegant and affordable fashion pieces.
shopandshinehub.click – Great variety here, products look amazing and prices are reasonable.
https://www.imdb.com/list/ls4157317380/
dreambelieveachieve.shop – Such a motivating brand, really connects with people chasing success.
exploreendlessideas.shop – Keeps me motivated to try new things, love this creative corner.
The 10 Most Terrifying Things About Affordable Car Key
Repair Car Key Repair
go https://web-breadwallet.com
9 Lessons Your Parents Taught You About Robotic
Vacuum Cleaner Uk robotic Vacuum cleaner uk
classychoiceoutlet.shop – Perfect for stylish finds, prices make it even more tempting.
Онлайн-курсы обучение прп: структурированная программа, стандарты стерильности, подготовка образца, минимизация рисков, протоколы для лица/шеи/кожи головы. Видеолекции и задания, разбор клинических ситуаций, пакет шаблонов для ведения пациента, экзамен и получение сертификата.
Nine Things That Your Parent Taught You About Robotic Vacuum Cleaner
Uk robotic vacuum Cleaner Uk
findbetteroptions.click – Love this site, helps compare and choose smarter shopping decisions easily.
The 10 Most Terrifying Things About Robot Vacuums
& Mops robot vacuums & Mops (http://www.qianqi.cloud)
dreambuycollection.click – Beautiful selections here, quality items that truly match their descriptions.
discoveryourpath.click – Beautifully designed site, helps me focus on personal growth daily.
Website https://fishexpo-volga.ru/ .
Five Killer Quora Answers On Robot Vacuum Uk robot vacuum uk; https://codimd.fiksel.info/3ppRVrVQRKy9PzXujmc-Bw/,
More Help https://sollet-wallet.io/
90’lar modas?n?n guzellik s?rlar?yla gunumuzun trendlerine meydan okumaya ne dersiniz?
Между прочим, если вас интересует Ev Dekorasyonunda S?kl?k ve Fonksiyonellik, посмотрите сюда.
Смотрите сами:
https://evimsicak.com
90’lar?n guzellik s?rlar?yla tarz?n?za yeni bir soluk kazand?rabilirsiniz. Eski moda, yeni size ilham olsun!
Ich freue mich riesig uber Cat Spins Casino, es entfuhrt in eine Welt voller Nervenkitzel. Die Auswahl ist einfach unschlagbar, mit aufregenden Live-Casino-Erlebnissen. Er bietet einen gro?artigen Vorteil. Die Mitarbeiter sind immer hilfsbereit. Gewinne kommen sofort an, ab und zu mehr Bonusangebote waren spitze. Kurz und bundig, Cat Spins Casino ist ein Ort fur pure Unterhaltung. Hinzu kommt die Plattform ist visuell ansprechend, das Spielerlebnis bereichert. Ein starker Vorteil sind die schnellen Krypto-Transaktionen, individuelle Vorteile liefern.
Mehr erkunden|
Ich bin fasziniert von SpinBetter Casino, es ist eine Erfahrung, die wie ein Wirbelsturm pulsiert. Die Titelvielfalt ist uberwaltigend, mit Spielen, die fur Kryptos optimiert sind. Der Service ist von hoher Qualitat, mit praziser Unterstutzung. Die Auszahlungen sind ultraschnell, trotzdem die Offers konnten gro?zugiger ausfallen. Zusammengefasst, SpinBetter Casino ist eine Plattform, die uberzeugt fur Online-Wetten-Fans ! Hinzu kommt die Navigation ist kinderleicht, was jede Session noch besser macht. Besonders toll die Community-Events, die den Spa? verlangern.
spinbettercasino.de|
Ich habe eine Leidenschaft fur Cat Spins Casino, es bietet packende Unterhaltung. Das Spieleangebot ist reichhaltig und vielfaltig, mit stilvollen Tischspielen. 100 % bis zu 500 € mit Freispielen. Die Mitarbeiter antworten schnell und freundlich. Auszahlungen sind blitzschnell, gelegentlich mehr Bonusangebote waren spitze. Zusammenfassend, Cat Spins Casino bietet ein unvergessliches Erlebnis. Zusatzlich die Navigation ist einfach und klar, jeden Moment aufregender macht. Ein gro?artiges Plus die spannenden Community-Aktionen, schnelle Zahlungen garantieren.
Loslegen|
everydaygiftcorner.click – Perfect site for gifts, found some lovely options for friends.
Je suis enthousiasme par Sugar Casino, il procure une sensation de frisson. Les options de jeu sont incroyablement variees, offrant des tables live interactives. Il booste votre aventure des le depart. Le support est efficace et amical. Les transactions sont toujours securisees, quelquefois quelques tours gratuits supplementaires seraient cool. En resume, Sugar Casino offre une aventure inoubliable. Notons egalement la plateforme est visuellement vibrante, ajoute une touche de dynamisme. Particulierement fun le programme VIP avec des niveaux exclusifs, propose des privileges personnalises.
Rejoindre maintenant|
5 Killer Quora Answers On Robot Hoover And Mop Robot hoover and mop (https://writeablog.net)
Je suis sous le charme de Ruby Slots Casino, ca pulse comme une soiree animee. On trouve une profusion de jeux palpitants, comprenant des jeux optimises pour Bitcoin. 100% jusqu’a 500 € avec des spins gratuits. Le suivi est d’une precision remarquable. Les paiements sont surs et efficaces, de temps en temps des offres plus importantes seraient super. En bref, Ruby Slots Casino est un endroit qui electrise. De plus la navigation est simple et intuitive, incite a prolonger le plaisir. Un avantage les tournois frequents pour l’adrenaline, renforce le lien communautaire.
Visiter la page web|
1000 рублей за регистрацию вывод сразу без вложений
Je suis enthousiaste a propos de Ruby Slots Casino, il procure une sensation de frisson. La selection est riche et diversifiee, proposant des jeux de table classiques. 100% jusqu’a 500 € avec des spins gratuits. Le service est disponible 24/7. Les paiements sont securises et rapides, cependant des recompenses supplementaires dynamiseraient le tout. En bref, Ruby Slots Casino est un endroit qui electrise. Par ailleurs le site est rapide et immersif, ajoute une vibe electrisante. Un plus les options variees pour les paris sportifs, renforce le lien communautaire.
Commencer Г explorer|
connectlearncreate.click – Amazing community vibe, love the focus on creativity and learning together.
What’s The Job Market For Good Robot Vacuum Cleaner Professionals Like?
Good robot vacuum cleaner
createinspirelead.click – Love the empowering tone here, truly encourages creativity and leadership.
Ich bin ganz hin und weg von Cat Spins Casino, es verspricht pure Spannung. Es gibt zahlreiche spannende Spiele, mit Spielen, die Krypto unterstutzen. Er sorgt fur einen starken Einstieg. Der Support ist professionell und schnell. Die Zahlungen sind sicher und zuverlassig, jedoch gro?ere Angebote waren super. Alles in allem, Cat Spins Casino sorgt fur kontinuierlichen Spa?. Daruber hinaus die Oberflache ist glatt und benutzerfreundlich, was jede Session spannender macht. Ein gro?artiges Bonus ist das VIP-Programm mit exklusiven Stufen, sichere Zahlungen garantieren.
Einen Blick werfen|
happylivingstore – Great balance of home essentials and fun decor, perfect for cozy spaces.
inspirechangealways – Every article I read here gives me a small burst of motivation.
карниз с приводом для штор http://www.elektrokarniz797.ru/ .
startanewjourney – The writing feels authentic, like advice from a wise, kind friend online.
changeyourdirection – This site really made me pause and rethink a few daily habits.
findjoytoday – I come here whenever I need a quick reminder to smile again.
shopwithstylehub – Everything looks sleek and modern, definitely my kind of shopping vibe.
simplevalueplace – Love the minimalist vibe here, everything feels useful and straightforward.
Развернутая статья тут: https://version.com.ua
smartfashionboutique.click – Stylish and modern pieces, definitely my go-to for classy fashion.
Новости кино со всего мира https://fankino.ru
startsomethingtoday – Just what I needed, a little spark to finally start something today.
explorethefuture – I like the tone here, it’s curious but still grounded in reality.
learnandgrowtoday – This page always gives me a gentle push to keep learning something new.
findyourpathnow – This blog makes self-discovery feel simple, not overwhelming or confusing.
freshfashioncorner – Love the trendy vibes here, everything feels modern and stylishly put together.
trendingstyleworld – So many creative looks here, definitely sparked some new outfit ideas.
startsomethingtoday – Feels like a gentle reminder that every goal starts with today.
purevalueoutlet – This place definitely earns a bookmark, great finds without breaking the bank.
yourdailytrend.click – Great source for everyday fashion inspiration, always something new featured.
createinspirelead – Clean website layout and inviting theme — promising start.
everydaystylecorner.click – Love browsing here, always find stylish items that suit my taste.
modernlivingstore.click – The collection is impressive, modern yet cozy and inviting overall.
90’lar modas?n?n guzellik s?rlar?yla gunumuzun trendlerine meydan okumaya ne dersiniz?
Между прочим, если вас интересует Guzellik ve Kozmetik: Trendler ve Ipuclar?, посмотрите сюда.
Ссылка ниже:
https://guzellikturk.com
90’lar?n buyusunu modern dunyaya tas?mak hic bu kadar kolay olmam?st?. Unutulmayan bu donemin guzellik s?rlar?n? unutmay?n!
5 Killer Quora Answers To Robotic Hoover robotic hoover
Технологии делают жизнь проще кракен onion kraken onion kraken onion ссылка kraken onion зеркала
The 10 Most Scariest Things About Best Robot Vacuums Uk Best Robot Vacuums Uk
informative post https://toast-wallet.net
buildsomethingnew.click – Inspiring projects here, really motivates me to start new creative ideas.
dig this https://web-breadwallet.com/
everydaystylecorner – The layout is clean and makes finding outfit tips simple and quick.
Read Full Article https://toast-wallet.net
redirected here https://web-breadwallet.com
expandyourhorizon.click – Great site for learning and exploring fresh perspectives every day.
The Best Automatic Vacuum Cleaner And Mop Tricks To Make A Difference In Your Life best Automatic vacuum Cleaner
pokies
Australia’s Top Pokies: Our Hands-On Testing Results
We at our team has spent countless months testing the top online pokies in Australia. We’ve manually checked each site, checking how fast they pay out, the actual value of their bonuses, their licensing, and how well they work on mobile devices.
Every site we list holds GCB license under 96GROUP, which means they meet standards for fair play and responsible gambling.
Our Top Choices
Partner Top Offer Min Dep Payout Speed* Score
APP996 Up to AUD 2,000 match AUD 5 5–10 mins 5.0
OPAL96 6% weekly commission AUD 5 ~10 mins 4.9
VIVA96 110% welcome bonus AUD 5 ~10–15 mins 4.8
MM96 VIP rewards + missions AUD 5 ~15 mins 4.7
Processing time after KYC verification. The time your bank takes may vary.
Our Discoveries
– APP996: Features a 50% welcome bonus and a 0.96% rebate.
– OPAL96: Boasts over 5,000 games and is a newer platform.
– VIVA96: Delivers a 110% bonus, 17% daily reload, and an 8% win/loss rebate.
– MM96: Contains up to a 100% welcome offer and daily missions.
Our Testing Process
We made true withdrawal attempts to verify processing times, ensured the validity of licenses and RNG fairness, scrutinized the real bonus value after accounting for wagering requirements and withdrawal caps, checked the quality of their 24/7 support, and verified responsible gambling tools were available.
Mobile Functionality
All these sites use Gialaitech’s mobile-suited platform:
– Play straight in the browser—no app needed
– Place the site to your home screen for quick access
– Features biometric login, works well with one hand, quick cashier (PayID, cards, e-wallets, crypto)
– Offers custom themes, session controls, and optional notifications for bonuses or payouts
Important Information
These partners are GCB-licensed. Our ratings are our own opinion—any affiliate payments don’t influence our scores. All bonuses come with terms (wagering requirements, withdrawal caps, game restrictions). Must be 18 or older.
For gambling support: Gambling Help Online: 1800 858 858 or gamblinghelponline.org.au
Gamble responsibly. Know your limits.
theworldawaits.click – Inspiring content, makes me want to explore and travel everywhere.
9e2seattle.com – Love the local coverage here, very informative and well-presented overall.
Tarz?n?z? 90’lar?n unutulmaz modas?ndan esinlenerek gunumuze tas?mak ister misiniz? Oyleyse bu yaz?m?z tam size gore!
Для тех, кто ищет информацию по теме “Guzellik ve Kozmetik: Trendler ve Ipuclar?”, есть отличная статья.
Вот, можете почитать:
https://guzellikturk.com
90’lar modas?n?n guzellik s?rlar?n? kesfetmek, tarz?n?za farkl? bir boyut kazand?rabilir. Denemeye deger degil mi?
1000 за регистрацию без депозита казино
connectwithideas.click – Amazing platform, really encourages collaboration and sharing of new innovative ideas.
Искал способы быстро генерировать изображения для проектов, и подборка дала все ответы. Выбрал два сервиса из списка, оба работают стабильно. Остальные инструменты взял на заметку: https://vc.ru/top_rating/2301994-luchshie-besplatnye-nejroseti-dlya-generatsii-izobrazheniy
Ich bin absolut begeistert von Cat Spins Casino, es verspricht pure Spannung. Die Spiele sind abwechslungsreich und spannend, mit Krypto-kompatiblen Spielen. Der Willkommensbonus ist ein Highlight. Der Support ist effizient und professionell. Die Zahlungen sind sicher und zuverlassig, trotzdem zusatzliche Freispiele waren willkommen. Im Gro?en und Ganzen, Cat Spins Casino sorgt fur ununterbrochenen Spa?. Nebenbei ist das Design stilvoll und einladend, was jede Session spannender macht. Ein starkes Feature die dynamischen Community-Events, personliche Vorteile bereitstellen.
Website erkunden|
Ich bin fasziniert von Cat Spins Casino, es ist ein Ort voller Energie. Das Angebot ist ein Traum fur Spieler, mit spannenden Sportwetten-Angeboten. 100 % bis zu 500 € und Freispiele. Der Support ist professionell und schnell. Auszahlungen sind blitzschnell, ab und zu ein paar zusatzliche Freispiele waren klasse. Abschlie?end, Cat Spins Casino ist ein Muss fur Spieler. Zudem die Navigation ist intuitiv und einfach, eine vollstandige Eintauchen ermoglicht. Ein gro?es Plus die haufigen Turniere fur mehr Spa?, zuverlassige Transaktionen sichern.
Mit dem Erkunden beginnen|
Ich bin komplett hin und weg von SpinBetter Casino, es ist eine Erfahrung, die wie ein Wirbelsturm pulsiert. Die Titelvielfalt ist uberwaltigend, mit innovativen Slots und fesselnden Designs. Der Service ist von hoher Qualitat, mit praziser Unterstutzung. Der Ablauf ist unkompliziert, trotzdem regelma?igere Aktionen waren toll. Zum Ende, SpinBetter Casino ist eine Plattform, die uberzeugt fur Krypto-Enthusiasten ! Zusatzlich das Design ist ansprechend und nutzerfreundlich, was jede Session noch besser macht. Besonders toll die Vielfalt an Zahlungsmethoden, die den Spa? verlangern.
spinbettercasino.de|
kionnawest.com – Inspiring platform, clearly shares vision and values in a compelling way.
nsfeg.org – Great resource for learning, very informative and well-structured content overall.
yourdailyshoppinghub.click – Convenient and well-organized store, makes daily shopping fast and enjoyable.
inspirechangealways.click – Great resource for positive thinking, content feels genuine and helpful.
Robot Cleaner Vacuum And Mop Tools To Make Your Daily Life
Robot Cleaner Vacuum And Mop Trick That Every Person Must
Learn Robot Cleaner Vacuum And Mop
chrishallforjudge.com – The FAQs helped answer my questions, felt like a transparent campaign.
J’adore l’ambiance electrisante de Ruby Slots Casino, il propose une aventure palpitante. Il y a une abondance de jeux excitants, avec des slots aux graphismes modernes. Il donne un elan excitant. Le suivi est d’une fiabilite exemplaire. Les paiements sont surs et fluides, neanmoins des offres plus consequentes seraient parfaites. En bref, Ruby Slots Casino garantit un plaisir constant. Par ailleurs le design est moderne et attrayant, permet une immersion complete. Un point cle le programme VIP avec des privileges speciaux, propose des avantages uniques.
Commencer Г lire|
J’ai une affection particuliere pour Ruby Slots Casino, il propose une aventure palpitante. Le catalogue de titres est vaste, comprenant des jeux compatibles avec les cryptos. Il propulse votre jeu des le debut. Le service client est excellent. Le processus est simple et transparent, mais encore des offres plus genereuses seraient top. Au final, Ruby Slots Casino est un endroit qui electrise. Ajoutons que la navigation est intuitive et lisse, amplifie l’adrenaline du jeu. Particulierement interessant les options de paris sportifs diversifiees, offre des bonus exclusifs.
Parcourir maintenant|
Je suis enthousiaste a propos de Sugar Casino, on ressent une ambiance festive. Le catalogue est un tresor de divertissements, avec des slots aux designs captivants. Le bonus de depart est top. Les agents sont rapides et pros. Le processus est transparent et rapide, cependant des bonus plus varies seraient un plus. Pour faire court, Sugar Casino vaut une exploration vibrante. En bonus le design est tendance et accrocheur, incite a prolonger le plaisir. A mettre en avant les options variees pour les paris sportifs, cree une communaute soudee.
Lire les dГ©tails|
Je suis captive par Ruby Slots Casino, ca transporte dans un univers de plaisirs. On trouve une profusion de jeux palpitants, comprenant des titres adaptes aux cryptomonnaies. Il offre un demarrage en fanfare. Le support est efficace et amical. Les paiements sont securises et instantanes, rarement des bonus plus frequents seraient un hit. Pour faire court, Ruby Slots Casino est une plateforme qui fait vibrer. En plus l’interface est simple et engageante, ce qui rend chaque partie plus fun. A mettre en avant les transactions crypto ultra-securisees, propose des privileges personnalises.
DГ©couvrir maintenant|
happylifestylehub.shop – I couldn’t easily locate product categories, pricing or a visible “About Us” section.
orourkeforphilly.com – Sharing this with friends who care about local politics; informative and professional.
nataliakerbabian.com – The story behind the project “Ilustro para no olvidar” adds real depth and context.
Онлайн-займ https://zaimy-87.ru без очередей: заполните форму, получите решение и деньги на карту. Выгодные ставки, понятный договор, кэшбэк и скидки при повторных обращениях. Напоминания о платежах, продление при необходимости. Выбирайте ответственно и экономьте.
Ich bin absolut begeistert von Cat Spins Casino, es sorgt fur pure Unterhaltung. Es gibt zahlreiche spannende Spiele, mit stilvollen Tischspielen. Der Willkommensbonus ist ein Highlight. Der Support ist schnell und freundlich. Transaktionen laufen reibungslos, von Zeit zu Zeit gro?zugigere Angebote waren klasse. Kurz gesagt, Cat Spins Casino garantiert langanhaltenden Spa?. Au?erdem ist das Design modern und einladend, eine Prise Stil hinzufugt. Ein Hauptvorteil die lebendigen Community-Events, ma?geschneiderte Privilegien liefern.
Erfahren Sie wie|
smyrnafestival.com – I like how the location map is easy to read and navigate.
90’lar modas?n? hat?rlayanlar burada m?? Sizlere gecmisin moda ikonu olan donemden ilhamla ipuclar? sundugumuz bu yaz?ya davetlisiniz.
Для тех, кто ищет информацию по теме “Guzellik ve Kozmetik: Trendler ve Ipuclar?”, нашел много полезного.
Вот, делюсь ссылкой:
https://guzellikturk.com
90’lar modas?n?n guzellik s?rlar?n? kesfetmek, tarz?n?za farkl? bir boyut kazand?rabilir. Denemeye deger degil mi?
yourdailytrend.shop – Love the trendy picks here, perfect for keeping up with fashion.
electcateriarmccabe.com – The website’s design feels professional yet approachable, good balance.
garymasino.com – Good to see client-focused language and clear value proposition on the site.
localphlmarket.com – The photos are clear, product descriptions are helpful — nice attention to detail.
trustedleaderscircle.bond – I found the site and the mission feels meaningful with trusted leadership ideals.
newhorizonsnetwork.shop – I visited the site and it looks clean with interesting product categories.
1911phl.com – Great information on local events, keeps me updated with ease.
monumentremoval.org – Important initiative, clearly explains the process and historical context respectfully.
successpathway.bond – I shared this link with a friend interested in similar sites; they liked it.
joinourcreativeworld.shop – For now, treat the link carefully since functionality and content appear very limited.
shopthelatesttrend.shop – The server-response is a generic file list, indicating the site may be under development.
thinkcreategrow.click – If this is for a backlink, it would be better to choose sites with complete content and professional finish.
exploreamazingideas.click – No “about” or “contact” page visible yet, which reduces transparency for now.
bestvaluecollection.click – Found some excellent deals, products are great quality for affordable prices.
cycleforsci.org – Really inspired by your mission, the biking + science idea is fantastic.
cumberlandcountynjvaccination.org – Very clear scheduling instructions and easy to follow, thanks for that.
mcalpineinfo.com – Love the detailed info here, very helpful and easy to follow.
natashaforjudge.com – Excellent campaign site, communicates priorities and experience clearly and effectively.
Фото из армии Prosoldat ru профессиональная съёмка армии: присяга, парады, учения. Создаём армейские альбомы, фотокниги, постеры; ретушь и цветокор, макеты, печать и доставка. Съёмочные группы по всей стране, аккредитация и дисциплина, чёткие сроки и цены.
oneillforda.com – Shared this site with friends interested in local elections; everything looks professional.
организация интернет трансляций организация интернет трансляций .
сделать онлайн трансляцию мероприятия http://www.zakazat-onlayn-translyaciyu5.ru/ .
imaginelearnexplore.click – Inspiring content overall, really helps spark creativity and curiosity daily.
uncommittednj.org – I appreciate the activism here, the content is engaging and thoughtful.
Eski ama asla eskimeyen 90’lar modas?n?n guzellik s?rlar?yla dolu bu yaz?da bulusal?m.
По теме “Guzellik ve Kozmetik: 90’lar Modas?ndan Ipuclar?”, там просто кладезь информации.
Вот, можете почитать:
https://aynakirildi.com
Tarz?n?zda 90’lar?n esintilerini hissetmeye baslad?g?n?za eminim. Gecmisin izlerini tas?maktan korkmay?n!
hardman4schools.com – Great campaign site, clearly communicates vision and priorities for education.
pmajoe4council.com – Informative site, provides clear insight into policies and council initiatives.
makeimpacttoday.click – Motivational platform, encourages me to take action and make a difference.
Adoro o swing de BacanaPlay Casino, parece uma festa carioca cheia de axe. As opcoes de jogo no cassino sao ricas e cheias de gingado, com slots de cassino tematicos de carnaval. O suporte do cassino ta sempre na ativa 24/7, com uma ajuda que brilha como serpentinas. O processo do cassino e limpo e sem tumulto, mesmo assim as ofertas do cassino podiam ser mais generosas. Em resumo, BacanaPlay Casino e um cassino online que e uma folia sem fim para quem curte apostar com gingado no cassino! De bonus a navegacao do cassino e facil como um passo de frevo, faz voce querer voltar ao cassino como num desfile sem fim.
bacanaplay safe|
Ich bin absolut begeistert von Cat Spins Casino, es ladt zu unvergesslichen Momenten ein. Es gibt zahlreiche spannende Spiele, mit Krypto-kompatiblen Spielen. Mit einfachen Einzahlungen. Der Support ist effizient und professionell. Gewinne werden ohne Wartezeit uberwiesen, trotzdem mehr Bonusoptionen waren top. Alles in allem, Cat Spins Casino ist perfekt fur Casino-Liebhaber. Ubrigens die Benutzeroberflache ist klar und flussig, was jede Session spannender macht. Ein klasse Bonus die haufigen Turniere fur Wettbewerb, die die Community enger zusammenschwei?en.
Zur Website gehen|
Ich bin abhangig von SpinBetter Casino, es fuhlt sich an wie ein Strudel aus Freude. Es wartet eine Fulle spannender Optionen, mit dynamischen Tischspielen. Die Agenten sind blitzschnell, mit praziser Unterstutzung. Der Ablauf ist unkompliziert, ab und an mehr abwechslungsreiche Boni waren super. Global gesehen, SpinBetter Casino ist eine Plattform, die uberzeugt fur Casino-Liebhaber ! Au?erdem die Site ist schnell und stylish, verstarkt die Immersion. Ein weiterer Vorteil die Sicherheit der Daten, die den Einstieg erleichtern.
spinbettercasino.de|
remiphl.com – The menu is creative and the ambiance feels casual but stylish.
Je suis emerveille par Ruby Slots Casino, ca invite a plonger dans le fun. On trouve une profusion de jeux palpitants, incluant des options de paris sportifs dynamiques. Il propulse votre jeu des le debut. Le suivi est d’une fiabilite exemplaire. Les gains sont verses sans attendre, par contre des offres plus consequentes seraient parfaites. Au final, Ruby Slots Casino merite un detour palpitant. Par ailleurs l’interface est fluide comme une soiree, apporte une energie supplementaire. Particulierement fun le programme VIP avec des recompenses exclusives, offre des recompenses regulieres.
Explorer le site|
Je ne me lasse pas de Sugar Casino, c’est une plateforme qui deborde de dynamisme. Les options de jeu sont infinies, comprenant des jeux crypto-friendly. 100% jusqu’a 500 € avec des spins gratuits. Le support est efficace et amical. Les paiements sont securises et rapides, par contre plus de promos regulieres ajouteraient du peps. Pour faire court, Sugar Casino est un incontournable pour les joueurs. En plus la plateforme est visuellement dynamique, incite a prolonger le plaisir. A signaler les nombreuses options de paris sportifs, qui motive les joueurs.
Voir maintenant|
Je suis sous le charme de Ruby Slots Casino, il cree une experience captivante. Les options de jeu sont incroyablement variees, proposant des jeux de table sophistiques. 100% jusqu’a 500 € plus des tours gratuits. Le suivi est d’une precision remarquable. Les transactions sont toujours fiables, parfois quelques free spins en plus seraient bienvenus. Globalement, Ruby Slots Casino est un immanquable pour les amateurs. Ajoutons que la plateforme est visuellement captivante, amplifie le plaisir de jouer. Egalement genial le programme VIP avec des avantages uniques, offre des bonus exclusifs.
DГ©couvrir plus|
discovergreatdeals.click – Love this site, always find amazing deals on quality products.
haginsforphilly.org – I like the focus on community issues and that the candidate seems accessible.
Ich liebe das Flair von Cat Spins Casino, es ist ein Hotspot fur Spielspa?. Das Angebot ist ein Traum fur Spieler, mit dynamischen Wettmoglichkeiten. Der Willkommensbonus ist ein Highlight. Der Service ist immer zuverlassig. Die Zahlungen sind sicher und sofortig, manchmal mehr Bonusvielfalt ware ein Vorteil. Zum Schluss, Cat Spins Casino ist ein Ort, der begeistert. Au?erdem ist das Design stilvoll und einladend, eine Note von Eleganz hinzufugt. Ein besonders cooles Feature sind die schnellen Krypto-Transaktionen, die Gemeinschaft starken.
Website besuchen|
9e2seattle.com – Love the local coverage here, very informative and well-presented overall.
sparxcle.com – Interesting products here, really innovative ideas and practical solutions overall.
Мучает зуд и жжение? Геморой – лечение без боли и очередей: диагностика, консервативная терапия, латексное лигирование, склеротерапия, лазер. Приём проктолога, анонимно, в день обращения. Индивидуальный план, быстрое восстановление, понятные цены и поддержка 24/7.
dibrunobottleshop.com – Browsing late at night, still responsive and smooth on mobile, thumbs up!
chery tiggo 2025 chery tiggo 4
90’lar modas?n? hat?rlayanlar burada m?? Sizlere gecmisin moda ikonu olan donemden ilhamla ipuclar? sundugumuz bu yaz?ya davetlisiniz.
Зацепил материал про Guzellik ve Kozmetik: Trendler ve Ipuclar?.
Смотрите сами:
https://guzellikturk.com
90’lar?n guzellik s?rlar?yla tarz?n?za yeni bir soluk kazand?rabilirsiniz. Eski moda, yeni size ilham olsun!
createandgrow.shop – For higher-quality backlinking, you might prefer domains with established content and clear offers.
бездепозитный бонус 1000 рублей в казино
findwhatyoulove.shop – For now it seems under development; using it for a backlink may offer limited immediate value.
modernlivingstyle.shop – Overall a pleasing site, I’m looking forward to seeing product launches.
simplybestchoice.click – The idea is promising, the name gives a strong sense of quality.
leanneslifechangingfairies.com – Beautiful and imaginative site, full of magical ideas for everyone.
simonscider.co.uk – Delicious cider options, love the quality and unique flavor choices here.
Полезное одним кликом: https://pg12.ru/pechat-plakatov-tehnologii-formaty-i-osobennosti-oformleniya
shopthebesttoday.click – Great online store, easy navigation and fantastic product deals daily.
ИТ-отрасль не знает кризисов кракен ссылка onion kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
Trusted and best: https://kvadrakub.ru/2025/10/27/Готовые-решения-для-запуска-рекламы/
learntradingtoday.bond – Excellent resource for beginners, explains trading concepts clearly and simply.
mdcphilly.com – Great local content, keeps community members informed about events and updates.
90’lardan gunumuze uzanan guzellik anlay?s?na ?s?k tutan bu rehberle, zaman?n otesine gecen bir tarz elde edin.
Кстати, если вас интересует Guzellik ve Kozmetik: Trendler ve Ipuclar?, загляните сюда.
Вот, можете почитать:
https://guzellikturk.com
90’lar?n buyusunu modern dunyaya tas?mak hic bu kadar kolay olmam?st?. Unutulmayan bu donemin guzellik s?rlar?n? unutmay?n!
maltonfestivalofracing.co.uk – Amazing festival coverage, really captures the excitement of racing events beautifully.
Цифровизация ускоряет экономику кракен onion kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
everydayvaluecorner.shop – I like that the brand suggests value for everyday essentials—nice concept.
simplybestchoice.shop – Great product variety, everything feels affordable and high quality overall.
https://factava.com.ua/vidpovidy/khto-taki-humanisty-osnovni-poniattia-ta-ikhnia-rol-u-suchasnomu-suspilstvi/
Блокчейн — символ доверия kraken маркетплейс зеркало кракен onion сайт kra ссылка kraken сайт
iswrphilly.com – Very professional organization, provides helpful resources and information for all users.
playfuel.co.uk – Great gaming products here, everything feels fun, creative, and high-quality.
shopthebesttoday.click – Great online store, easy navigation and fantastic product deals daily.
DRINKIO — это комфорт и надёжность в одном. Курьеры приезжают быстро, заказ оформляется за пару минут. Ассортимент впечатляет, всё качественное. Удобно, что можно заказать в любое время суток. Операторы вежливые, всегда помогут. Круглосуточная доставка алкоголя в Москве: https://drinkio105.ru/
Sou louco pela energia de BacanaPlay Casino, da uma energia de cassino que e pura purpurina. As opcoes de jogo no cassino sao ricas e cheias de gingado, com jogos de cassino perfeitos pra criptomoedas. O servico do cassino e confiavel e cheio de swing, acessivel por chat ou e-mail. As transacoes do cassino sao simples como um passo de samba, mas mais giros gratis no cassino seria uma loucura. No geral, BacanaPlay Casino garante uma diversao de cassino que e um carnaval total para os folioes do cassino! De bonus a interface do cassino e fluida e reluz como uma fantasia de carnaval, eleva a imersao no cassino ao ritmo de um tamborim.
bacanaplay cГіdigo bГіnus|
Кибербезопасность важнее, чем когда-либо kra ссылка кракен onion сайт kra ссылка kraken сайт
Ich freue mich sehr uber Cat Spins Casino, es verspricht ein einzigartiges Abenteuer. Es gibt eine enorme Vielfalt an Spielen, mit immersiven Live-Dealer-Spielen. Er gibt Ihnen einen tollen Boost. Der Support ist professionell und schnell. Transaktionen sind zuverlassig und klar, manchmal mehr Aktionen waren ein Gewinn. Kurz gesagt, Cat Spins Casino sorgt fur ununterbrochenen Spa?. Zudem die Benutzeroberflache ist flussig und intuitiv, jeden Moment aufregender macht. Ein hervorragendes Plus die haufigen Turniere fur mehr Spa?, kontinuierliche Belohnungen bieten.
Mehr lesen|
90’lardan gunumuze uzanan guzellik anlay?s?na ?s?k tutan bu rehberle, zaman?n otesine gecen bir tarz elde edin.
Для тех, кто ищет информацию по теме “Ev Dekorasyonunda S?kl?k ve Fonksiyonellik”, там просто кладезь информации.
Смотрите сами:
https://evimsicak.com
90’lar?n buyusunu modern dunyaya tas?mak hic bu kadar kolay olmam?st?. Unutulmayan bu donemin guzellik s?rlar?n? unutmay?n!
Ich bin fasziniert von SpinBetter Casino, es ist eine Erfahrung, die wie ein Wirbelsturm pulsiert. Das Angebot an Spielen ist phanomenal, mit Spielen, die fur Kryptos optimiert sind. Die Agenten sind blitzschnell, verfugbar rund um die Uhr. Die Auszahlungen sind ultraschnell, gelegentlich zusatzliche Freispiele waren ein Highlight. In Kurze, SpinBetter Casino bietet unvergessliche Momente fur Adrenalin-Sucher ! Zusatzlich das Design ist ansprechend und nutzerfreundlich, fugt Magie hinzu. Hervorzuheben ist die mobilen Apps, die den Spa? verlangern.
spinbettercasino.de|
nomnomnomfordogs.com – Overall great concept for pet treats, definitely worth checking out.
harrietlevinmillan.com – Informative and well-written content, really highlights expertise and knowledge clearly.
Je suis fascine par Sugar Casino, il cree une experience captivante. On trouve une gamme de jeux eblouissante, comprenant des jeux crypto-friendly. Il rend le debut de l’aventure palpitant. Le support est fiable et reactif. Les gains sont verses sans attendre, mais encore plus de promos regulieres dynamiseraient le jeu. Dans l’ensemble, Sugar Casino offre une aventure memorable. Pour ajouter la plateforme est visuellement captivante, facilite une immersion totale. Un atout les paiements en crypto rapides et surs, qui dynamise l’engagement.
Explorer maintenant|
J’ai un faible pour Sugar Casino, on ressent une ambiance festive. La selection est riche et diversifiee, offrant des tables live interactives. Le bonus de depart est top. Le support est efficace et amical. Les gains arrivent sans delai, rarement des bonus varies rendraient le tout plus fun. Au final, Sugar Casino est une plateforme qui fait vibrer. En plus la navigation est intuitive et lisse, donne envie de continuer l’aventure. Egalement excellent les transactions crypto ultra-securisees, garantit des paiements securises.
Aller au site|
Je suis enthousiaste a propos de Ruby Slots Casino, ca invite a l’aventure. Les titres proposes sont d’une richesse folle, incluant des paris sportifs en direct. 100% jusqu’a 500 € avec des free spins. Le support est rapide et professionnel. Les retraits sont lisses comme jamais, par moments des bonus plus varies seraient un plus. Pour finir, Ruby Slots Casino est un incontournable pour les joueurs. De plus l’interface est intuitive et fluide, incite a rester plus longtemps. Particulierement fun les tournois reguliers pour la competition, offre des recompenses regulieres.
Lire les dГ©tails|
Je suis captive par Ruby Slots Casino, ca donne une vibe electrisante. La bibliotheque est pleine de surprises, offrant des sessions live immersives. Avec des depots rapides et faciles. Disponible a toute heure via chat ou email. Les retraits sont lisses comme jamais, de temps en temps plus de promos regulieres dynamiseraient le jeu. Globalement, Ruby Slots Casino offre une aventure inoubliable. Ajoutons que le site est fluide et attractif, amplifie l’adrenaline du jeu. Un avantage les competitions regulieres pour plus de fun, qui booste la participation.
https://rubyslotscasinoapp777fr.com/|
nextrealm.click – Interesting concept, love the futuristic vibe and creative presentation overall.
dreambuyworld – I didn’t immediately find a detailed “About Us” section — more transparency would help.
asterixfilm.co.uk – Fantastic movie content, perfect for fans of animation and classic films.
Машинное обучение — мозг современных систем кракен darknet kraken актуальные ссылки кракен ссылка kraken kraken официальные ссылки
Je suis bluffe par Ruby Slots Casino, c’est une plateforme qui deborde de dynamisme. Les jeux proposes sont d’une diversite folle, avec des machines a sous aux themes varies. Avec des depots fluides. Le suivi est d’une precision remarquable. Les gains sont verses sans attendre, par moments des offres plus importantes seraient super. Globalement, Ruby Slots Casino offre une aventure memorable. De surcroit le site est fluide et attractif, ce qui rend chaque partie plus fun. Particulierement attrayant les evenements communautaires engageants, offre des recompenses regulieres.
DГ©couvrir|
Ich freue mich auf Cat Spins Casino, es schafft eine aufregende Atmosphare. Die Spielesammlung ist uberwaltigend, mit spannenden Sportwetten-Angeboten. Mit schnellen Einzahlungen. Der Kundendienst ist ausgezeichnet. Der Prozess ist einfach und transparent, gelegentlich mehr Aktionen wurden das Erlebnis steigern. Kurz gesagt, Cat Spins Casino bietet ein einmaliges Erlebnis. Au?erdem ist das Design stilvoll und modern, das Vergnugen maximiert. Ein bemerkenswertes Feature die dynamischen Community-Veranstaltungen, exklusive Boni bieten.
Startseite ansehen|
buildyourdreamtoday – The site loads fast and navigation is smooth, big plus.
learntradingtoday – Browsed a few modules, the pace is comfortable and not overwhelming.
wrestlingac – Will definitely revisit to explore more features or offers once I have time.
unitedbygoal – The navigation is intuitive, I found what I needed without fuss.
cepjournal – The range of topics seems broad — from general interest to tech, which feels ambitious. :contentReference[oaicite:0]index=0
strategicgrowthalliance – Considering bookmarking this place to check back for updates and offerings.
forexlearninghub – The branding looks slick and professional, that’s a plus for sure.
foruminvestmali – The branding gives a professional first impression, though some of the domain metrics seem outdated. :contentReference[oaicite:0]index=0
Интернет вещей делает дома умными
кракен darknet кракен onion кракен ссылка onion
pepplish – The flavor combinations sound wild and fresh, totally intrigued by it.
inspireeverydaylife.shop – Bookmarking this to revisit when more updates, products or posts go live.
dreamcreateinspire.shop – Beautiful design, love the inspiring message and creative energy here.
trabas007hoki – Noticed great improvement lately, site runs smoother than last month.
flourandoak – Love the vibe your site has, really modern yet warm.
togetherwerise – I’ll revisit later to see if they add more about their results and credibility.
pp4fdr.org – Important initiative, shares valuable guidance and updates in a clear manner.
theworldawaits.click – Inspiring content, makes me want to explore and travel everywhere.
90’lar modas?n?n guzellik s?rlar?yla gunumuzun trendlerine meydan okumaya ne dersiniz?
По теме “Ev Dekorasyonunda Modern ve Estetik Cozumler”, нашел много полезного.
Вот, делюсь ссылкой:
https://evimturk.com
Nostalji dolu bu yolculukta bizimle oldugunuz icin tesekkur ederiz. 90’lar modas? ve guzelliginin ruhunu hissedin.
Данные — новая нефть XXI века кракен даркнет маркет кракен darknet кракен onion кракен ссылка onion
urbanmatrix.click – Modern and stylish concept, offers great insights into urban innovation.
thebestplacetoshop.shop – The product photos are well done, which builds trust quickly.
Хочешь вылечить геморрой – современный подход к лечению геморроя: точная диагностика, персональный план, амбулаторные процедуры за 20–30 минут. Контроль боли, быстрый возврат к активной жизни, рекомендации по образу жизни и профилактике, анонимность и понятные цены.
bestdealsforlife.shop – For now, trust signals such as “About Us”, reviews or detailed products are missing.
Современный атмосферный ресторан в Москве с открытой кухней: локальные фермерские ингредиенты, свежая выпечка, бар с коктейлями. Панорамные виды, терраса летом, детское меню. Бронирование столов онлайн, банкеты и дни рождения «под ключ».
Sykaaa казино приложение При заходе на официальный сайт Sykaaa Casino вас встречает современный и интуитивно понятный дизайн. Цветовая гамма, как правило, подобрана так, чтобы не отвлекать от главного – игр. Основные разделы, такие как “Казино”, “Спорт”, “Акции”, “Поддержка” и “Профиль”, легко доступны с главной страницы или через удобное меню. Это позволяет быстро найти нужную информацию или перейти к любимым играм, не тратя время на поиски.
theworldawaits.click – Inspiring content, makes me want to explore and travel everywhere.
ks4thekids.com – Wonderful platform for children, lots of creative learning opportunities provided.
seven kay casino официальный сайт casino seven kay онлайн обеспечивает быстрые депозиты и выплаты через популярные платёжные методы.
Estou alucinado com BetorSpin Casino, oferece uma aventura de cassino que orbita como um cometa reluzente. A selecao de titulos do cassino e um buraco negro de diversao, com caca-niqueis de cassino modernos e hipnotizantes. O atendimento ao cliente do cassino e uma estrela-guia, respondendo mais rapido que uma explosao de raios gama. Os ganhos do cassino chegam voando como um asteroide, porem as ofertas do cassino podiam ser mais generosas. No geral, BetorSpin Casino vale demais explorar esse cassino para os apaixonados por slots modernos de cassino! Alem disso o design do cassino e um espetaculo visual intergalactico, torna a experiencia de cassino uma viagem espacial.
casino betorspin bГіnus|
Ich bin total angetan von Cat Spins Casino, es bietet packende Unterhaltung. Es gibt zahlreiche spannende Spiele, mit Spielautomaten in kreativen Designs. Er sorgt fur einen starken Einstieg. Der Kundensupport ist erstklassig. Auszahlungen sind einfach und schnell, in seltenen Fallen mehr Bonusvielfalt ware ein Vorteil. Abschlie?end, Cat Spins Casino bietet ein unvergleichliches Erlebnis. Nebenbei die Oberflache ist benutzerfreundlich, jeden Moment aufregender macht. Ein wichtiger Vorteil die haufigen Turniere fur Wettbewerb, die die Community enger zusammenschwei?en.
http://www.catspinscasinogames.de|
theworldawaits.click – Inspiring content, makes me want to explore and travel everywhere.
Ich liebe das Flair von Cat Spins Casino, es entfuhrt in eine Welt voller Nervenkitzel. Das Angebot ist ein Paradies fur Spieler, inklusive dynamischer Sportwetten. Er gibt Ihnen einen Kickstart. Der Support ist professionell und schnell. Auszahlungen sind schnell und reibungslos, ab und zu mehr Bonusvielfalt ware ein Vorteil. Zum Schluss, Cat Spins Casino bietet ein gro?artiges Erlebnis. Nebenbei die Plattform ist visuell beeindruckend, das Spielerlebnis steigert. Ein Hauptvorteil ist das VIP-Programm mit tollen Privilegien, ma?geschneiderte Privilegien liefern.
Alles erfahren|
ks4thekids.com – Wonderful platform for children, lots of creative learning opportunities provided.
Ich habe einen totalen Hang zu SpinBetter Casino, es erzeugt eine Spielenergie, die fesselt. Das Angebot an Spielen ist phanomenal, mit aufregenden Sportwetten. Der Kundenservice ist ausgezeichnet, bietet klare Losungen. Die Auszahlungen sind ultraschnell, obwohl mehr Rewards waren ein Plus. Alles in allem, SpinBetter Casino ist ein Muss fur alle Gamer fur Online-Wetten-Fans ! Daruber hinaus die Plattform ist visuell ein Hit, fugt Magie hinzu. Zusatzlich zu beachten die schnellen Einzahlungen, die das Spielen noch angenehmer machen.
https://spinbettercasino.de/|
Tarz?n?z? 90’lar?n unutulmaz modas?ndan esinlenerek gunumuze tas?mak ister misiniz? Oyleyse bu yaz?m?z tam size gore!
Для тех, кто ищет информацию по теме “Evinizde Estetik ve Fonksiyonu Birlestirin: Ipuclar? ve Trendler”, нашел много полезного.
Ссылка ниже:
https://anadolustil.com
Guzellik, gecmisle gunumuz aras?nda bir kopru kurmakt?r. 90’lar?n moda s?rlar?, bu koprunun onemli parcalar?ndan.
Je suis bluffe par Sugar Casino, il propose une aventure palpitante. La gamme est variee et attrayante, avec des slots aux graphismes modernes. Il propulse votre jeu des le debut. Le support client est irreprochable. Le processus est fluide et intuitif, par moments des recompenses supplementaires seraient parfaites. Globalement, Sugar Casino offre une experience inoubliable. En plus le design est moderne et energique, ajoute une touche de dynamisme. Un avantage les transactions crypto ultra-securisees, cree une communaute vibrante.
Avancer|
Сукааа казино официальный сайт зеркало рабочее на сегодня Если вы ищете новое место для азартных развлечений, то официальный сайт Sykaaa Casino, вероятно, привлечет ваше внимание. Это онлайн-казино стремится предложить игрокам разнообразный опыт, сочетая в себе широкий выбор игр, привлекательные бонусы и удобный интерфейс. Давайте разберемся, что же делает Sykaaa Casino особенным и на что стоит обратить внимание при первом знакомстве с их платформой.
J’adore l’ambiance electrisante de Ruby Slots Casino, c’est un lieu ou l’adrenaline coule a flots. Les options sont aussi vastes qu’un horizon, offrant des experiences de casino en direct. Il rend le debut de l’aventure palpitant. Le service client est excellent. Les gains sont transferes rapidement, malgre tout quelques tours gratuits supplementaires seraient cool. En somme, Ruby Slots Casino merite un detour palpitant. Pour completer la navigation est intuitive et lisse, permet une plongee totale dans le jeu. Un point fort les evenements communautaires pleins d’energie, propose des privileges sur mesure.
https://rubyslotscasinologinfr.com/|
Нужна ликвидация? https://www.zakrit-kompaniu-doo.me: добровольная ликвидация, банкротство, реорганизация. Подготовка документов, публикации, сверка с ФНС/ПФР, закрытие счетов. Сроки по договору, прозрачная смета, конфиденциальность, сопровождение до внесения записи в ЕГРЮЛ.
Tasfiyeye mi ihtiyac?n?z var? sirketin kapat?lmas?: borc analizi, yasal prosedurun secimi (istege bagl? veya iflas), alacakl?lar?n bildirimi, tasfiye bilancosu, sicilden silme. Son teslim tarihlerini ve sabit fiyat? netlestirin.
kraken market Kraken ссылка – это навигатор по бескрайним просторам даркнета, указывающий путь к заветной цели. Однако, доверять первой попавшейся ссылке равносильно прыжку в пропасть с завязанными глазами. Прежде чем сделать этот шаг, убедитесь в её подлинности, проверьте репутацию источника и подготовьтесь к возможным неожиданностям. Безопасность превыше всего, и только внимательность и осторожность помогут вам избежать неприятных сюрпризов.
Обзоры игровых ПК на https://game-computers.ru помогут быстро определиться с оптимальным вариантом игровой сборки под любые потребности. Здесь собраны обзоры популярных моделей, сравнения комплектующих и советы по выбору систем охлаждения, блоков питания и корпусов.
J’adore le dynamisme de Sugar Casino, il procure une sensation de frisson. La selection est riche et diversifiee, comprenant des jeux optimises pour Bitcoin. 100% jusqu’a 500 € avec des spins gratuits. Le suivi est toujours au top. Les gains sont verses sans attendre, malgre tout plus de promos regulieres ajouteraient du peps. En bref, Sugar Casino est un lieu de fun absolu. Pour ajouter l’interface est lisse et agreable, permet une plongee totale dans le jeu. Egalement genial les evenements communautaires vibrants, renforce la communaute.
Aller à l’intérieur|
Ich bin total angetan von Cat Spins Casino, es ist ein Ort voller Energie. Das Angebot ist ein Paradies fur Spieler, mit immersiven Live-Dealer-Spielen. 100 % bis zu 500 € plus Freispiele. Der Kundensupport ist top. Der Prozess ist unkompliziert, in seltenen Fallen mehr Bonusangebote waren spitze. Am Ende, Cat Spins Casino bietet ein unvergleichliches Erlebnis. Daruber hinaus ist das Design stilvoll und modern, eine vollstandige Eintauchen ermoglicht. Ein Hauptvorteil die lebendigen Community-Events, die die Community enger zusammenschwei?en.
Details prГјfen|
theworldawaits.click – Inspiring content, makes me want to explore and travel everywhere.
brauhausschmitzoktoberfest.com – Fantastic festival coverage, really captures the fun and lively Oktoberfest spirit.
Greetings, have tried to subscribe to this websites rss feed but I am having a bit of a problem. Can anyone kindly tell me what to do?’
rosetemplates – I like how the site presents its template categories, looks well-organised and professional.
28darlingstreet – They list family-friendly and kids welcome which is a nice touch for mixed groups. :contentReference[oaicite:2]index=2
lifestyleinspirationhub – The brand tone feels friendly and modern; definitely got me interested.
moesboardwalk – If I were booking from abroad I’d check location/logistics (looks like North Wildwood). :contentReference[oaicite:3]index=3
bloemhill – Overall: a visually compelling site, high potential—just nice to confirm the operational details.
theperfectgiftshop – The brand tone feels friendly and modern, which is nice for a gift-shop vibe.
yourdailyupdate – If you’re planning to purchase, I’d recommend checking payment security and return policy carefully.
trendinsight – I like the range of content, but I couldn’t immediately find strong “about us” or company background details.
trendyfindshub – The site loads quickly and looks solid on mobile, which is convenient.
getinspiredtoday – The homepage greets me with crisp visuals and a neatly organised layout.
connectdiscovergrow – The homepage looks inviting and well-designed, gives a good first impression.
Sykaaa казино приложение При заходе на официальный сайт Sykaaa Casino вас встречает современный и интуитивно понятный дизайн. Цветовая гамма, как правило, подобрана так, чтобы не отвлекать от главного – игр. Основные разделы, такие как “Казино”, “Спорт”, “Акции”, “Поддержка” и “Профиль”, легко доступны с главной страницы или через удобное меню. Это позволяет быстро найти нужную информацию или перейти к любимым играм, не тратя время на поиски.
envolavecning – The website layout is clean and I could quickly browse through styles, which I appreciate.
theworldawaits.click – Inspiring content, makes me want to explore and travel everywhere.
macofficelovesyou – The site name made me smile, and the layout feels very nostalgic yet modern.
rebeccacaridad-manzanita – I like the way she mixes mediums (photography + painting) and it feels authentic.
engagement-forum – If you’re considering participating, I’d recommend doing a small test or checking separate reviews before full commitment.
clubinorout.com – Great nightlife guide, keeps me updated on clubs and events easily.
90’lar modas?n?n guzellik s?rlar?yla gunumuzun trendlerine meydan okumaya ne dersiniz?
Для тех, кто ищет информацию по теме “Evinizde Estetik ve Fonksiyonu Birlestirin: Ipuclar? ve Trendler”, есть отличная статья.
Ссылка ниже:
https://anadolustil.com
Tarz?n?zda 90’lar?n esintilerini hissetmeye baslad?g?n?za eminim. Gecmisin izlerini tas?maktan korkmay?n!
madmadedesigns – Suggestion: checking domain history and business registration might give extra assurance before a big order.
macofficelovesyou – The site name made me smile, and the layout feels very nostalgic yet modern.
Всё для дачи и цветов https://amandine.ru/ журнал с понятными инструкциями, схемами и списками покупок. Посев, пикировка, прививка, обрезка, подкормки, защита без лишней химии. Планировки теплиц, уход за газоном и цветниками, идеи декора, советы экспертов.
Need liquidation? https://www.liquidation-of-company.me: voluntary liquidation, bankruptcy, reorganization. Document preparation, publications, reconciliation, account closure. Contractual terms, transparent estimates, confidentiality, support.
https://metacon35.ru/ официальный сайт seven kay casino обеспечивает прозрачность условий игры и быстрый доступ к кассе.
joebobsaveschristmas – The branding is memorable and the URL stands out which is nice.
Hi there! I know this is kinda off topic nevertheless I’d
figured I’d ask. Would you be interested in trading links or maybe guest writing a blog article or vice-versa?
My blog addresses a lot of the same topics as yours and I feel we could greatly benefit from
each other. If you happen to be interested feel free to send me
an email. I look forward to hearing from you! Terrific
blog by the way!
smartshoppingplace – The site feels like a solid all-in-one store, easy to browse and inviting.
Sou louco pela energia de BetorSpin Casino, oferece uma aventura de cassino que orbita como um cometa reluzente. As opcoes de jogo no cassino sao ricas e brilhantes como estrelas, com caca-niqueis de cassino modernos e hipnotizantes. O servico do cassino e confiavel e brilha como uma galaxia, com uma ajuda que reluz como uma aurora boreal. Os ganhos do cassino chegam voando como um asteroide, mesmo assim mais bonus regulares no cassino seria intergalactico. Em resumo, BetorSpin Casino oferece uma experiencia de cassino que e puro brilho cosmico para quem curte apostar com estilo estelar no cassino! Vale dizer tambem o design do cassino e um espetaculo visual intergalactico, o que torna cada sessao de cassino ainda mais estelar.
betorspin bonus|
sega-live – Without strong evidence of fulfilment history, I’d treat it as a higher-risk choice rather than a trusted brand.
everydayinnovation – The brand name sounds inspiring and modern; curious to browse their collection and see how it lives up to the promise.
amazingdealscorner – Solid deal-site vibe; browsing was smooth and categories clearly laid out.
Ich bin fasziniert von SpinBetter Casino, es ist eine Erfahrung, die wie ein Wirbelsturm pulsiert. Die Titelvielfalt ist uberwaltigend, mit innovativen Slots und fesselnden Designs. Der Kundenservice ist ausgezeichnet, garantiert top Hilfe. Der Ablauf ist unkompliziert, obwohl mehr Rewards waren ein Plus. Zum Ende, SpinBetter Casino ist ein Muss fur alle Gamer fur Casino-Liebhaber ! Daruber hinaus das Design ist ansprechend und nutzerfreundlich, gibt den Anreiz, langer zu bleiben. Zusatzlich zu beachten die Community-Events, die Flexibilitat bieten.
https://spinbettercasino.de/|
jojoanime10th – Looks like a fun anime-themed project; the visuals really pop with color.
Je suis emerveille par Sugar Casino, ca offre une experience immersive. Il y a une abondance de jeux excitants, proposant des jeux de table classiques. Il amplifie le plaisir des l’entree. Disponible 24/7 par chat ou email. Les transactions sont toujours securisees, neanmoins des recompenses additionnelles seraient ideales. Pour finir, Sugar Casino merite un detour palpitant. Ajoutons que la plateforme est visuellement electrisante, ce qui rend chaque partie plus fun. A noter les nombreuses options de paris sportifs, renforce le lien communautaire.
DГ©couvrir davantage|
J’adore l’energie de Ruby Slots Casino, il offre une experience dynamique. Les jeux proposes sont d’une diversite folle, comprenant des titres adaptes aux cryptomonnaies. Il donne un elan excitant. Le support client est irreprochable. Les transactions sont toujours fiables, bien que des recompenses supplementaires seraient parfaites. En resume, Ruby Slots Casino assure un divertissement non-stop. A souligner le site est fluide et attractif, ce qui rend chaque session plus excitante. A souligner le programme VIP avec des avantages uniques, cree une communaute vibrante.
Explorer davantage|
Ich freue mich riesig uber Cat Spins Casino, es schafft eine aufregende Atmosphare. Es gibt eine enorme Vielfalt an Spielen, mit Krypto-kompatiblen Spielen. Der Bonus fur Neukunden ist attraktiv. Der Support ist professionell und schnell. Der Prozess ist transparent und schnell, dennoch ein paar zusatzliche Freispiele waren klasse. Insgesamt, Cat Spins Casino ist definitiv einen Besuch wert. Nebenbei die Oberflache ist glatt und benutzerfreundlich, das Vergnugen maximiert. Ein klasse Bonus sind die sicheren Krypto-Zahlungen, regelma?ige Boni bieten.
https://catspins24.com/|
J’adore la vibe de Sugar Casino, c’est une plateforme qui deborde de dynamisme. La bibliotheque de jeux est captivante, proposant des jeux de table sophistiques. 100% jusqu’a 500 € plus des tours gratuits. Le suivi est d’une precision remarquable. Le processus est clair et efficace, en revanche quelques spins gratuits en plus seraient top. Pour finir, Sugar Casino garantit un plaisir constant. En plus la navigation est fluide et facile, facilite une experience immersive. Particulierement fun les transactions crypto ultra-securisees, offre des bonus constants.
Aller sur le web|
Комплексное простатит лечение с применением современных препаратов и физиотерапии.
Tarz?n?z? 90’lar?n unutulmaz modas?ndan esinlenerek gunumuze tas?mak ister misiniz? Oyleyse bu yaz?m?z tam size gore!
Зацепил материал про Ev Dekorasyonunda Modern ve Estetik Cozumler.
Вот, можете почитать:
https://evimturk.com
Tarz?n?zda 90’lar?n esintilerini hissetmeye baslad?g?n?za eminim. Gecmisin izlerini tas?maktan korkmay?n!
shapeyourdreams – The phrase gets me motivated! Would like to see more about the product story or what makes it unique.
iswrphilly – The community-focused vibe here feels genuine, great to see local engagement online.
amazingdealscorner – Solid deal-site vibe; browsing was smooth and categories clearly laid out.
online casino australia
Australia’s Best Pokies: Our Real Testing Results
We at our team has spent months testing the top online pokies in Australia. We’ve manually checked each site, checking how fast they pay out, the actual value of their bonuses, their licensing, and how well they work on handheld devices.
Every site we list holds GCB license under 96GROUP, which means they meet standards for fair play and responsible gambling.
Our Selected Sites
Partner Top Offer Min Dep Payout Speed* Score
APP996 Up to AUD 2,000 match AUD 5 5–10 mins 5.0
OPAL96 6% weekly commission AUD 5 ~10 mins 4.9
VIVA96 110% welcome bonus AUD 5 ~10–15 mins 4.8
MM96 VIP rewards + missions AUD 5 ~15 mins 4.7
Verification time after KYC verification. Your bank’s processing times may vary.
What We Discovered
– APP996: Features a 50% welcome bonus and a 0.96% rebate.
– OPAL96: Has over 5,000 games and is a newer platform.
– VIVA96: Supplies a 110% bonus, 17% daily reload, and an 8% win/loss rebate.
– MM96: Contains up to a 100% welcome offer and daily missions.
How We Test
We made genuine withdrawals to verify processing times, checked the validity of licenses and RNG fairness, analyzed the real bonus value after accounting for wagering requirements and withdrawal caps, evaluated the quality of their 24/7 support, and ensured responsible gambling tools were available.
Mobile Experience
All these sites use Gialaitech’s mobile-suited platform:
– Play right in browser—no app needed
– Add the site to your home screen for quick access
– Supports biometric login, works well with one hand, quick cashier (PayID, cards, e-wallets, crypto)
– Offers custom themes, session controls, and optional notifications for bonuses or payouts
Key Details
These partners are GCB-licensed. Our ratings are our own opinion—any affiliate payments don’t influence our scores. All bonuses come with terms (wagering requirements, withdrawal caps, game restrictions). Must be 18 or older.
Should you need gambling assistance: Gambling Help Online: 1800 858 858 or gamblinghelponline.org.au
Game responsibly. Know your limits.
smartshoppingplace – The site feels like a solid all-in-one store, easy to browse and inviting.
hanayaka-na-life – Elegant and serene design, the Japanese aesthetic truly shines through beautifully.
Galera, quero registrar aqui no 4PlayBet Casino porque superou minhas expectativas. A variedade de jogos e bem acima da media: jogos ao vivo imersivos, todos funcionando perfeito. O suporte foi amigavel, responderam em minutos pelo chat, algo que passa seguranca. Fiz saque em Bitcoin e o dinheiro entrou em minutos, ponto fortissimo. Se tivesse que criticar, diria que faltam bonus extras, mas isso nao estraga a experiencia. Enfim, o 4PlayBet Casino me conquistou. Eu ja voltei varias vezes.
co-ed confidential 4play|
everydaychoicehub – “Choice hub” feels like a central spot for variety—nice for finding items you might not expect.
Hello there! I really enjoy reading your blog! If you keep making amazing posts like this I will come back every day to keep reading.
Ich habe einen Narren gefressen an Cat Spins Casino, es ist ein Hotspot fur Spielspa?. Das Portfolio ist vielfaltig und attraktiv, mit interaktiven Live-Spielen. 100 % bis zu 500 € und Freispiele. Der Support ist professionell und schnell. Auszahlungen sind blitzschnell, trotzdem mehr Bonusangebote waren ideal. Alles in allem, Cat Spins Casino bietet ein unvergleichliches Erlebnis. Hinzu kommt die Seite ist schnell und attraktiv, das Spielerlebnis bereichert. Ein weiteres Highlight sind die sicheren Krypto-Transaktionen, die Teilnahme fordern.
Mit dem Entdecken beginnen|
Ich bin beeindruckt von SpinBetter Casino, es bietet einen einzigartigen Kick. Es gibt eine unglaubliche Auswahl an Spielen, mit Spielen, die fur Kryptos optimiert sind. Die Hilfe ist effizient und pro, bietet klare Losungen. Der Ablauf ist unkompliziert, obwohl regelma?igere Aktionen waren toll. In Kurze, SpinBetter Casino ist absolut empfehlenswert fur Online-Wetten-Fans ! Daruber hinaus die Interface ist intuitiv und modern, gibt den Anreiz, langer zu bleiben. Ein Pluspunkt ist die mobilen Apps, die das Spielen noch angenehmer machen.
https://spinbettercasino.de/|
Je suis totalement conquis par Sugar Casino, ca invite a l’aventure. La gamme est variee et attrayante, proposant des jeux de casino traditionnels. Il propulse votre jeu des le debut. Le service client est excellent. Les paiements sont securises et instantanes, cependant des recompenses additionnelles seraient ideales. En conclusion, Sugar Casino garantit un amusement continu. A signaler le site est rapide et style, ce qui rend chaque partie plus fun. Particulierement cool les competitions regulieres pour plus de fun, qui booste la participation.
Lancer le site|
everymomentmatters – The name hits emotionally, good for meaningful purchases; just check the fine details.
Je suis fascine par Ruby Slots Casino, on ressent une ambiance festive. Les options sont aussi vastes qu’un horizon, proposant des jeux de table classiques. Avec des depots instantanes. Le suivi est toujours au top. Le processus est simple et transparent, par moments plus de promos regulieres ajouteraient du peps. Dans l’ensemble, Ruby Slots Casino est une plateforme qui pulse. Par ailleurs le site est rapide et engageant, donne envie de continuer l’aventure. A noter les evenements communautaires dynamiques, assure des transactions fiables.
Entrer sur le site|
shopwithhappiness – Love the cheerful tone; browsing here actually feels positive and easygoing.
Je suis fascine par Sugar Casino, il procure une sensation de frisson. Il y a un eventail de titres captivants, avec des slots aux graphismes modernes. Avec des depots fluides. Disponible 24/7 pour toute question. Les transactions sont fiables et efficaces, cependant plus de promos regulieres ajouteraient du peps. En resume, Sugar Casino assure un divertissement non-stop. Pour ajouter le site est rapide et style, amplifie le plaisir de jouer. Un point fort les transactions crypto ultra-securisees, offre des bonus exclusifs.
Explorer la page|
findsomethingamazing – This site has a positive vibe, fun to browse through daily.
dreamdealsstore – The name fits perfectly, every visit feels like a lucky find.
90’lardan gunumuze uzanan guzellik anlay?s?na ?s?k tutan bu rehberle, zaman?n otesine gecen bir tarz elde edin.
Хочу выделить раздел про Guzellik ve Kozmetik: 90’lar Modas?ndan Ipuclar?.
Вот, делюсь ссылкой:
https://aynakirildi.com
Guzellik, gecmisle gunumuz aras?nda bir kopru kurmakt?r. 90’lar?n moda s?rlar?, bu koprunun onemli parcalar?ndan.
thebestvalue – The site looks professional and the value is obvious from the first glance.
modernstylemarket – Great name and the design looks sharp—perfect for trend-savvy shoppers.
discovergreatoffers – Straight to the point: you’re promised “great offers”—good for bargain-hunters if service and shipping align.
продолжить https://lerosa.com.br
где купить диплом колледжа в астрахани https://frei-diplom7.ru/ .
everydaychoicehub – Simple yet effective site to help with daily decisions, very handy really.
discovernewhorizons – Love how this site opens up new perspectives and fresh ideas every time.
brightstylecorner – Found some amazing outfit ideas, this site has real style vibes.
findbetteropportunities – The advice here feels real and useful, not just generic inspiration.
dailychoicecorner – The variety of items surprised me, it’s like a cozy online bazaar.
urbanwearoutlet – Stylish urban fashion outlet feel, lots of potential if the sizing and quality hold up.
shapeyourdreams – The writing style here is genuine, not forced or overly polished.
globalfashionfinds – Always end up finding cool fashion ideas whenever I visit this site.
trendylifestylehub – Great layout and smooth browsing, made me stay and explore longer than I planned.
findyourinspiration – Always discover small but meaningful insights that help me stay focused and calm.
findyourowngrowth – Love the clean layout and calm vibe, perfect for mindful reading.
посетить сайт https://lerosa.com.br/
ТОП-10 компаний по печати на футболках в Санкт-Петербурге https://teletype.in/@alexd78/p7K3J4hm1Lc .
globalfashionfinds – Love the trendy pieces here, everything looks so stylish and modern.
findyourfocus – Such a peaceful layout, makes reading and reflecting super enjoyable.
обложка на паспорт со своим дизайном http://www.telegra.ph/Mir-korporativnoj-atributiki-polnyj-gid-po-uslugam-pechati-10-28/ .
trendsettersparadise – Love how every page feels like a mini trend-gallery, so well done.
opennewdoors – A metaphorical name that feels encouraging; ideal for exploration or finding fresh options.
startyourjourneytoday – The motivational tone of the brand instantly boosts your mood while browsing.
inspiredthinkinghub – I like how they frame the brand as a place for ideas, not just shopping.
нажмите здесь https://lerosa.com.br
learnexploreachieve – Inspiring brand name; if they deliver educational tools or courses this could be a good fit.
Guzellik ve kozmetikte her zaman gecmisten al?nacak dersler bulunur. 90’lar?n modas?ndan guzellik s?rlar?n? kesfetmeye haz?r olun.
Особенно понравился материал про Guzellik ve Kozmetik: 90’lar Modas?ndan Ipuclar?.
Вот, делюсь ссылкой:
https://aynakirildi.com
Nostalji dolu bu yolculukta bizimle oldugunuz icin tesekkur ederiz. 90’lar modas? ve guzelliginin ruhunu hissedin.
dreamcreateachieve – Full of ambition in one line—makes me think this brand supports creative and lifestyle change.
Ich bin ein gro?er Fan von Cat Spins Casino, es ist ein Hotspot fur Spielspa?. Die Spielauswahl ist ein echtes Highlight, mit stilvollen Tischspielen. Der Willkommensbonus ist gro?zugig. Die Mitarbeiter sind schnell und kompetent. Der Prozess ist unkompliziert, dennoch mehr Promo-Vielfalt ware toll. Alles in allem, Cat Spins Casino ist ein Top-Ziel fur Spieler. Au?erdem die Seite ist zugig und ansprechend, zum Verweilen einladt. Ein starkes Feature sind die sicheren Krypto-Transaktionen, exklusive Boni bieten.
Mehr sehen|
creativegiftplace – So many thoughtful gift ideas; perfect for finding something personal and unique.
Ich bin fasziniert von Cat Spins Casino, es ist ein Ort, der begeistert. Die Spielauswahl ist ein echtes Highlight, mit Krypto-kompatiblen Spielen. 100 % bis zu 500 € inklusive Freispiele. Der Service ist von hochster Qualitat. Gewinne werden schnell uberwiesen, allerdings ein paar zusatzliche Freispiele waren klasse. Letztlich, Cat Spins Casino ist ideal fur Spielbegeisterte. Zudem die Oberflache ist benutzerfreundlich, jede Session unvergesslich macht. Ein super Vorteil sind die zuverlassigen Krypto-Zahlungen, die Gemeinschaft starken.
Web entdecken|
Galera, vim dividir minhas impressoes no 4PlayBet Casino porque superou minhas expectativas. A variedade de jogos e de cair o queixo: slots modernos, todos funcionando perfeito. O suporte foi atencioso, responderam em minutos pelo chat, algo que faz diferenca. Fiz saque em Bitcoin e o dinheiro entrou em minutos, ponto fortissimo. Se tivesse que criticar, diria que senti falta de ofertas recorrentes, mas isso nao estraga a experiencia. Resumindo, o 4PlayBet Casino e completo. Vale experimentar.
4play kya hota hai|
бездепозитные бонусы за регистрацию в букмекерской конторе Многие игроки хотят попробовать свои силы в онлайн-казино, не рискуя собственными деньгами. И это вполне реально! Существуют казино, которые предлагают приветственные бонусы за простую регистрацию. Это отличная возможность познакомиться с платформой, оценить ассортимент игр и даже выиграть реальные деньги, не тратя ни копейки из своего кармана.
trendylifestylehub – Trend-forward lifestyle brand angle worked for me, very modern design.
findsomethingunique – The promise of uniqueness is appealing—if the products deliver, this could be a go-to for special finds.
Ich habe eine Leidenschaft fur Cat Spins Casino, es entfuhrt in eine Welt voller Spa?. Es gibt unzahlige packende Spiele, mit Spielen, die Krypto unterstutzen. Mit sofortigen Einzahlungen. Verfugbar 24/7 fur alle Fragen. Gewinne kommen sofort an, manchmal zusatzliche Freispiele waren ein Bonus. Zusammenfassend, Cat Spins Casino garantiert dauerhaften Spielspa?. Zudem die Benutzeroberflache ist klar und flussig, einen Hauch von Eleganz hinzufugt. Besonders erwahnenswert sind die zuverlassigen Krypto-Zahlungen, die Gemeinschaft starken.
Mehr wissen|
classytrendcollection – The products feel trendy yet elegant, really fits the “classy” branding well.
Ich bin beeindruckt von SpinBetter Casino, es fuhlt sich an wie ein Strudel aus Freude. Der Katalog ist reichhaltig und variiert, mit innovativen Slots und fesselnden Designs. Die Agenten sind blitzschnell, garantiert top Hilfe. Die Gewinne kommen prompt, gelegentlich regelma?igere Aktionen waren toll. Zusammengefasst, SpinBetter Casino bietet unvergessliche Momente fur Krypto-Enthusiasten ! Zusatzlich die Plattform ist visuell ein Hit, verstarkt die Immersion. Besonders toll die Sicherheit der Daten, die das Spielen noch angenehmer machen.
https://spinbettercasino.de/|
brightnewbeginnings – The name gives a fresh start vibe; nice for seasonal or motivational purchases.
Howdy this is kinda of off topic but I was wondering if blogs use WYSIWYG editors or if you have to manually code with HTML. I’m starting a blog soon but have no coding experience so I wanted to get advice from someone with experience. Any help would be greatly appreciated!
https://rajasthanjoints.com/melbet-kazino-sloty-skachat-2025/
Je suis completement seduit par Sugar Casino, ca offre une experience immersive. On trouve une profusion de jeux palpitants, proposant des jeux de table sophistiques. Avec des transactions rapides. Le support est fiable et reactif. Le processus est simple et transparent, bien que des recompenses additionnelles seraient ideales. Pour finir, Sugar Casino offre une experience hors du commun. En extra le design est moderne et attrayant, ce qui rend chaque session plus palpitante. Un bonus le programme VIP avec des avantages uniques, cree une communaute vibrante.
Essayer ceci|
Website backlinks SEO
Locate us by the following queries: website backlinks, SEO backlinks, Google backlinks, link development, link building specialist, receive backlinks, backlink service, site backlinks, order backlinks, Kwork-based backlinks, webpage backlinks, search engine backlinks.
рейтинг агентств digital рейтинг агентств digital .
J’ai un veritable coup de c?ur pour Sugar Casino, ca offre une experience immersive. Il y a une abondance de jeux excitants, comprenant des jeux compatibles avec les cryptos. Avec des depots instantanes. Le service client est excellent. Les gains arrivent sans delai, par ailleurs des bonus varies rendraient le tout plus fun. Pour finir, Sugar Casino vaut une visite excitante. Pour completer le site est rapide et immersif, booste l’excitation du jeu. Egalement super les tournois frequents pour l’adrenaline, propose des avantages sur mesure.
Aller sur le site|
1xbet giri? linki 1xbet giri? linki .
dailytrendspot – Feels like a stylish marketplace where you can discover cool new finds.
90’lar modas?n? hat?rlayanlar burada m?? Sizlere gecmisin moda ikonu olan donemden ilhamla ipuclar? sundugumuz bu yaz?ya davetlisiniz.
Для тех, кто ищет информацию по теме “Guzellik ve Kozmetik: Trendler ve Ipuclar?”, там просто кладезь информации.
Вот, можете почитать:
https://guzellikturk.com
90’lar modas?n?n guzellik s?rlar?n? kesfetmek, tarz?n?za farkl? bir boyut kazand?rabilir. Denemeye deger degil mi?
mystylezone – Simple and stylish brand name, great for a fashion-oriented site where personal style matters.
simplystylishstore – Clean aesthetic and clear shopping experience; nice for simple, polished purchases.
yourstylematters – I like the empowering message behind the name, style should always be personal.
Ich bin vollig uberzeugt von Cat Spins Casino, es verspricht pure Spannung. Es gibt eine riesige Vielfalt an Spielen, mit interaktiven Live-Spielen. Er macht den Einstieg unvergesslich. Die Mitarbeiter antworten prazise. Der Prozess ist unkompliziert, aber gro?zugigere Angebote waren klasse. Kurz und bundig, Cat Spins Casino garantiert dauerhaften Spielspa?. Nebenbei die Benutzeroberflache ist flussig und intuitiv, das Spielvergnugen steigert. Ein gro?er Pluspunkt ist das VIP-Programm mit einzigartigen Belohnungen, sichere Zahlungen garantieren.
Webseite besuchen|
urbanstylemarket – Overall pleasant shopping experience, keeps me coming back for updates.
ссылка на сайт https://lerosa.com.br
Hello to every single one, it’s truly a pleasant for me to go to see this web page, it consists of valuable Information.
https://www.robot-turkey.com/skachat-mel-bet-bukmekerskaya-2025/
learnsomethingeveryday – Loved how each piece gave me something new to think about.
findyourinspiration – Very motivating messaging; makes me think of product categories that spark ideas or renew your look.
trendshopworld – Global-sounding brand, good for catching wide variety of trends.
Ich schatze die Spannung bei Cat Spins Casino, es bietet ein mitrei?endes Spielerlebnis. Die Spiele sind abwechslungsreich und fesselnd, mit modernen Slots in ansprechenden Designs. Er gibt Ihnen einen Kickstart. Der Service ist von hochster Qualitat. Die Zahlungen sind sicher und effizient, gelegentlich gro?ere Boni waren ein Highlight. Letztlich, Cat Spins Casino ist ein Ort fur pure Unterhaltung. Zusatzlich ist das Design zeitgema? und attraktiv, eine Note von Eleganz hinzufugt. Ein weiteres Highlight ist das VIP-Programm mit besonderen Vorteilen, reibungslose Transaktionen sichern.
Hier fortfahren|
Ich bin beeindruckt von Cat Spins Casino, es ist ein Ort voller Energie. Die Spiele sind abwechslungsreich und spannend, mit Spielen, die Krypto unterstutzen. Mit einfachen Einzahlungen. Der Service ist von hochster Qualitat. Der Prozess ist transparent und schnell, aber haufigere Promos wurden begeistern. Am Ende, Cat Spins Casino bietet ein unvergessliches Erlebnis. Hinzu kommt die Navigation ist intuitiv und einfach, das Vergnugen maximiert. Ein tolles Feature ist das VIP-Programm mit einzigartigen Belohnungen, die die Begeisterung steigern.
Hier fortfahren|
Ich bin fasziniert von SpinBetter Casino, es ist eine Erfahrung, die wie ein Wirbelsturm pulsiert. Das Angebot an Spielen ist phanomenal, mit innovativen Slots und fesselnden Designs. Der Kundenservice ist ausgezeichnet, mit praziser Unterstutzung. Die Transaktionen sind verlasslich, trotzdem mehr abwechslungsreiche Boni waren super. Zum Ende, SpinBetter Casino garantiert hochsten Spa? fur Krypto-Enthusiasten ! Nicht zu vergessen die Plattform ist visuell ein Hit, verstarkt die Immersion. Ein Pluspunkt ist die Sicherheit der Daten, die das Spielen noch angenehmer machen.
https://spinbettercasino.de/|
It’s really a cool and useful piece of information. I am
glad that you shared this helpful information with us. Please stay
us informed like this. Thanks for sharing.
J’ai un faible pour Ruby Slots Casino, ca transporte dans un univers de plaisirs. La gamme est variee et attrayante, incluant des paris sportifs pleins de vie. Le bonus initial est super. Les agents sont rapides et pros. Les paiements sont surs et fluides, de temps a autre plus de promotions frequentes boosteraient l’experience. Au final, Ruby Slots Casino offre une aventure memorable. De surcroit le design est moderne et attrayant, ajoute une vibe electrisante. A souligner le programme VIP avec des avantages uniques, offre des recompenses continues.
Plonger dedans|
Портал про все https://version.com.ua новини, технології, здоров’я, будинок, авто, подорожі, фінанси та кар’єра. Щоденні статті, огляди, лайфхаки та інструкції. Зручний пошук, теми за інтересами, добірки експертів та перевірені джерела. Читайте, навчайтеся, заощаджуйте час.
findbetteropportunities – Ambitious name—makes me curious about what “better opportunities” means for customers.
купить chery pro chery tiggo 9 ultra
J’adore l’energie de Sugar Casino, on y trouve une energie contagieuse. La bibliotheque de jeux est captivante, comprenant des jeux crypto-friendly. Le bonus de bienvenue est genereux. Les agents repondent avec efficacite. Les retraits sont simples et rapides, mais quelques tours gratuits supplementaires seraient cool. Pour conclure, Sugar Casino vaut une exploration vibrante. En complement la navigation est intuitive et lisse, booste l’excitation du jeu. A souligner les options de paris sportifs variees, garantit des paiements securises.
DГ©couvrir dГЁs maintenant|
Журнал для дачников https://www.amandine.ru и цветоводов: что посадить, когда поливать и чем подкармливать. Календарь, таблицы совместимости, защита от вредителей, обрезка и размножение. Планы грядок, тепличные секреты, бюджетные решения и советы профессионалов.
Je suis accro a Sugar Casino, il cree un monde de sensations fortes. La variete des jeux est epoustouflante, incluant des paris sportifs pleins de vie. 100% jusqu’a 500 € plus des tours gratuits. Les agents repondent avec rapidite. Les transactions sont toujours fiables, neanmoins des offres plus genereuses rendraient l’experience meilleure. En conclusion, Sugar Casino offre une aventure memorable. De surcroit la plateforme est visuellement vibrante, amplifie l’adrenaline du jeu. Egalement top les paiements securises en crypto, garantit des paiements securises.
http://www.sugarcasinoappfr.com|
fashiondailydeals – Prices look great for trendy pieces, could easily become a go-to fashion stop.
найти это https://lerosa.com.br
нажмите здесь https://lerosa.com.br/
Je suis completement seduit par Ruby Slots Casino, ca transporte dans un monde d’excitation. La selection de jeux est impressionnante, incluant des paris sur des evenements sportifs. 100% jusqu’a 500 € avec des free spins. Le service client est de qualite. Les paiements sont surs et efficaces, mais plus de promotions frequentes boosteraient l’experience. Globalement, Ruby Slots Casino assure un fun constant. Pour couronner le tout la navigation est simple et intuitive, amplifie l’adrenaline du jeu. Egalement top les transactions crypto ultra-securisees, offre des recompenses continues.
DГ©couvrir plus|
90’lardan gunumuze uzanan guzellik anlay?s?na ?s?k tutan bu rehberle, zaman?n otesine gecen bir tarz elde edin.
Хочу выделить материал про Ev Dekorasyonunda S?kl?k ve Fonksiyonellik.
Вот, делюсь ссылкой:
https://evimsicak.com
Guzellik, gecmisle gunumuz aras?nda bir kopru kurmakt?r. 90’lar?n moda s?rlar?, bu koprunun onemli parcalar?ndan.
findyourinspiration – Very motivating messaging; makes me think of product categories that spark ideas or renew your look.
brightstylecorner – The layout’s bright energy instantly catches your eye, really uplifting vibe overall.
Ledger Wallet ensures your Bitcoin and altcoins remain safe. Ledger Live provides a full-featured platform for secure transfers, staking, and portfolio growth.
ledger download for Windows
ledge-my-live.to
yourvisionmatters – Empowering message and good styling; strong brand identity right out of the gate.
perfectbuyzone – Smooth browsing experience, site is clean and the deals are easy to check.
узнать больше https://lerosa.com.br
thebestcorner – Simple and strong branding—makes you believe you found a great spot for deals.
discoverfreshperspectives – Feels more boutique or niche, good for curated products or design-forward picks.
uniquevaluecorner – Good selection of affordable items, name fits perfectly with what’s offered.
yourstylematters – The visuals are sharp and the fashion picks feel modern yet wearable.
Sizi gecmisten ilham alan guzellik ipuclar?yla dolu bu nostaljik yolculuga davet ediyoruz. 90’lar modas?n?n s?rlar?na goz atal?m m??
Между прочим, если вас интересует Ev Dekorasyonunda Modern ve Estetik Cozumler, загляните сюда.
Вот, делюсь ссылкой:
https://evimturk.com
90’lar?n buyusunu modern dunyaya tas?mak hic bu kadar kolay olmam?st?. Unutulmayan bu donemin guzellik s?rlar?n? unutmay?n!
Ich bin begeistert von der Welt bei Cat Spins Casino, es ist ein Hotspot fur Spielspa?. Es gibt unzahlige packende Spiele, mit modernen Slots in ansprechenden Designs. Er macht den Einstieg unvergesslich. Der Service ist einwandfrei. Der Prozess ist unkompliziert, gelegentlich mehr Aktionen waren ein Gewinn. Zum Schluss, Cat Spins Casino sorgt fur kontinuierlichen Spa?. Ubrigens die Oberflache ist glatt und benutzerfreundlich, eine tiefe Immersion ermoglicht. Ein tolles Feature ist das VIP-Programm mit einzigartigen Belohnungen, reibungslose Transaktionen sichern.
Ins Web gehen|
purechoiceoutlet – Clean design and simple layout, made browsing feel effortless and enjoyable.
Бонусы казино
где купить диплом техникума в нижнем новгороде где купить диплом техникума в нижнем новгороде .
For smaller pools with lower liquidity, fee rates may be high but you might face slippage or execution risk — always weigh liquidity quality.
uniswap pool app
uniswap-pool-info.cc
посетить веб-сайт kra45 сс
discoverbetterdeals – Found some great bargains here, feels like a true hidden gem online.
Je trouve absolument fantastique 7BitCasino, ca ressemble a une experience de jeu electrisante. La gamme de jeux est tout simplement impressionnante, proposant des jeux de table elegants et classiques. Le support est ultra-reactif et professionnel, repondant en un clin d’?il. Les retraits sont ultra-rapides, cependant j’aimerais plus d’offres promotionnelles, ou des promotions hebdomadaires plus frequentes. En resume, 7BitCasino vaut pleinement le detour pour les adeptes de sensations fortes ! Notons egalement que le site est concu avec style et modernite, facilite chaque session de jeu.
7bitcasino 25|
shopwithhappiness –Impressed by how easy it is to navigate; felt confident checking offers.
purechoiceoutlet – The selection feels thoughtful, like there’s quality behind the offers.
fashiondailydeals – Great site layout, the deals looked easy to scan and fun to browse.
Tarz?n?z? 90’lar?n unutulmaz modas?ndan esinlenerek gunumuze tas?mak ister misiniz? Oyleyse bu yaz?m?z tam size gore!
Зацепил материал про Guzellik ve Kozmetik: 90’lar Modas?ndan Ipuclar?.
Ссылка ниже:
https://aynakirildi.com
Nostalji dolu bu yolculukta bizimle oldugunuz icin tesekkur ederiz. 90’lar modas? ve guzelliginin ruhunu hissedin.
brightnewbeginnings – Quickly found ideas that resonated with me—thanks for sharing this resource.
trendshopworld – Bookmarking this site for future fashion searches—excited to explore more.
yournextadventure – Love how the layout highlights adventures in a way that makes me want to book.
trendandstylehub – Love the trendy picks and layout, everything looks well curated and stylish.
uniquevaluecorner – Browsing here was pleasant; found a few ideas I’ll revisit soon.
everymomentmatters – The tone is reassuring and the visuals are easy on the eyes—very welcome.
shopthedayaway – A solid find today, happy to discover a site with this kind of energy.
luxuryfindsonline – Great user experience, pages load fast and navigation is intuitive.
inspiredthinkinghub – One of the better sites for thoughtful inspiration I’ve found lately.
modernideasnetwork – This site has some really interesting concepts, felt engaging and fresh.
dreamdealsstore – This store really delivers value, I keep checking it for updates.
connectsharegrow – Found some engaging content, the site looks clean and easy to use.
Hello all, here every person is sharing these know-how, thus it’s pleasant to read this weblog, and I used to visit this website all the time.
https://samsung888.com/skachat-melbet-kazino-2025-2/
moveforwardnow – Great design and smooth navigation, browsing was easy and enjoyable.
Ich bin ganz hin und weg von Cat Spins Casino, es verspricht pure Spannung. Es gibt zahlreiche spannende Spiele, mit stilvollen Tischspielen. Mit einfachen Einzahlungen. Der Support ist effizient und professionell. Transaktionen laufen reibungslos, aber gro?ere Angebote waren super. Alles in allem, Cat Spins Casino ist ein Ort, der begeistert. Nebenbei die Plattform ist visuell beeindruckend, jeden Augenblick spannender macht. Ein wichtiger Vorteil die dynamischen Community-Events, kontinuierliche Belohnungen bieten.
Seite erkunden|
Ich bin beeindruckt von SpinBetter Casino, es liefert ein Abenteuer voller Energie. Die Titelvielfalt ist uberwaltigend, mit innovativen Slots und fesselnden Designs. Der Support ist 24/7 erreichbar, verfugbar rund um die Uhr. Die Auszahlungen sind ultraschnell, ab und an zusatzliche Freispiele waren ein Highlight. Alles in allem, SpinBetter Casino bietet unvergessliche Momente fur Krypto-Enthusiasten ! Daruber hinaus die Navigation ist kinderleicht, verstarkt die Immersion. Zusatzlich zu beachten die Sicherheit der Daten, die das Spielen noch angenehmer machen.
spinbettercasino.de|
взгляните на сайте здесь kra at
creativityunlocked – Inspiring content, really helps spark new ideas and creative thoughts.
J’adore le dynamisme de Ruby Slots Casino, il cree un monde de sensations fortes. Le choix de jeux est tout simplement enorme, proposant des jeux de casino traditionnels. Avec des depots fluides. Disponible a toute heure via chat ou email. Les transactions sont fiables et efficaces, parfois des recompenses supplementaires dynamiseraient le tout. Dans l’ensemble, Ruby Slots Casino est un endroit qui electrise. A souligner le design est moderne et attrayant, permet une plongee totale dans le jeu. Un avantage notable les evenements communautaires pleins d’energie, propose des avantages uniques.
DГ©couvrir le web|
Je suis captive par Ruby Slots Casino, on ressent une ambiance de fete. Les titres proposes sont d’une richesse folle, avec des slots aux graphismes modernes. 100% jusqu’a 500 € + tours gratuits. Les agents sont rapides et pros. Les retraits sont lisses comme jamais, mais des offres plus genereuses seraient top. En fin de compte, Ruby Slots Casino est un must pour les passionnes. En extra la plateforme est visuellement electrisante, amplifie le plaisir de jouer. A souligner les tournois reguliers pour s’amuser, qui dynamise l’engagement.
Emmenez-moi lГ -bas|
подробнее здесь kra43 сс
Je suis enthousiasme par Sugar Casino, il propose une aventure palpitante. La bibliotheque est pleine de surprises, comprenant des jeux compatibles avec les cryptos. Le bonus de bienvenue est genereux. Disponible a toute heure via chat ou email. Les retraits sont lisses comme jamais, neanmoins plus de promotions variees ajouteraient du fun. Au final, Sugar Casino est une plateforme qui fait vibrer. En extra la plateforme est visuellement captivante, ce qui rend chaque partie plus fun. Particulierement interessant les transactions crypto ultra-securisees, offre des bonus exclusifs.
Commencer Г lire|
Je suis captive par Sugar Casino, ca transporte dans un monde d’excitation. Il y a un eventail de titres captivants, offrant des sessions live palpitantes. Avec des depots fluides. Les agents repondent avec efficacite. Les gains arrivent en un eclair, malgre tout des bonus plus frequents seraient un hit. En fin de compte, Sugar Casino offre une aventure inoubliable. Par ailleurs la navigation est intuitive et lisse, facilite une experience immersive. Un plus les evenements communautaires pleins d’energie, qui stimule l’engagement.
Commencer Г naviguer|
Купить квартиру https://kvartiracenterspb.ru просто: новостройки и вторичка, студии и семейные планировки. Ипотека от 0,1%, маткапитал, субсидии. Юрпроверка, безопасная сделка, помощь в одобрении, торг с застройщиком. Подбор по району, бюджету и срокам сдачи. Сопровождение до ключей.
Купить квартиру https://novostroydoma.ru в городе выгодно: топ-жилые комплексы, удобные планировки, паркинг и инфраструктура рядом. Ипотека, семейная ипотека 6%, маткапитал. Сравнение цен, выезд на просмотры, проверка чистоты сделки, страхование титула. Экономим время и деньги.
Покупка квартиры https://piterdomovoy.ru «под ключ»: новостройки бизнес/комфорт-класса и надёжная вторичка. Аналитика цен, динамика сдачи, инфраструктура. Ипотека, субсидии, маткапитал. Юридический аудит, безопасные расчёты, регистрация сделки онлайн. Переезд без забот.
Квартира вашей мечты https://kvartiracenter-kypit.ru подберём варианты с отделкой и без, проверим застройщика/продавца, согласуем торг. Ипотека 6–12%, семейные программы, маткапитал. Онлайн-показы, электронная подача в Росреестр, безопасная оплата. Экономим время и бюджет.
shopanddiscover – Fun shopping experience with great variety, will definitely visit again soon.
tranquilityspany şirketi d0n0m0 b0n0s0 tarafından işletilmekte olup Curacao eGaming lisansına sahiptir
J’adore l’ambiance electrisante de Wild Robin Casino, ca pulse comme une soiree animee. Les titres proposes sont d’une richesse folle, proposant des jeux de cartes elegants. Il propulse votre jeu des le debut. Le support client est irreprochable. Le processus est simple et transparent, a l’occasion plus de promos regulieres dynamiseraient le jeu. En resume, Wild Robin Casino est une plateforme qui fait vibrer. D’ailleurs le design est style et moderne, apporte une energie supplementaire. A souligner les tournois reguliers pour s’amuser, offre des bonus exclusifs.
AccГ©der maintenant|
Je suis enthousiasme par Wild Robin Casino, il cree un monde de sensations fortes. La selection est riche et diversifiee, incluant des paris sportifs en direct. Le bonus initial est super. Le service client est excellent. Le processus est clair et efficace, parfois plus de promos regulieres dynamiseraient le jeu. Pour finir, Wild Robin Casino merite un detour palpitant. En extra la navigation est simple et intuitive, donne envie de prolonger l’aventure. Particulierement interessant les competitions regulieres pour plus de fun, garantit des paiements securises.
Parcourir le site|
Источник kra43
J’adore la vibe de Frumzi Casino, c’est une plateforme qui deborde de dynamisme. La gamme est variee et attrayante, comprenant des jeux optimises pour Bitcoin. Il donne un avantage immediat. Le support est fiable et reactif. Le processus est fluide et intuitif, bien que des offres plus genereuses rendraient l’experience meilleure. Pour faire court, Frumzi Casino garantit un amusement continu. Pour couronner le tout le site est rapide et immersif, apporte une touche d’excitation. A signaler le programme VIP avec des avantages uniques, offre des recompenses continues.
Commencer Г naviguer|
Je suis enthousiasme par Frumzi Casino, c’est une plateforme qui deborde de dynamisme. Il y a un eventail de titres captivants, comprenant des titres adaptes aux cryptomonnaies. Le bonus de bienvenue est genereux. Le service client est excellent. Le processus est fluide et intuitif, rarement quelques tours gratuits en plus seraient geniaux. Au final, Frumzi Casino offre une experience hors du commun. Pour couronner le tout le design est moderne et energique, amplifie le plaisir de jouer. Egalement super les competitions regulieres pour plus de fun, garantit des paiements rapides.
En savoir plus|
90’lar modas?n? hat?rlayanlar burada m?? Sizlere gecmisin moda ikonu olan donemden ilhamla ipuclar? sundugumuz bu yaz?ya davetlisiniz.
Кстати, если вас интересует Ev Dekorasyonunda S?kl?k ve Fonksiyonellik, загляните сюда.
Вот, можете почитать:
https://evimsicak.com
90’lar?n buyusunu modern dunyaya tas?mak hic bu kadar kolay olmam?st?. Unutulmayan bu donemin guzellik s?rlar?n? unutmay?n!
Je suis accro a Wild Robin Casino, c’est une plateforme qui deborde de dynamisme. La selection est riche et diversifiee, comprenant des jeux crypto-friendly. 100% jusqu’a 500 € avec des free spins. Disponible a toute heure via chat ou email. Les paiements sont securises et rapides, rarement plus de promotions frequentes boosteraient l’experience. Pour faire court, Wild Robin Casino est un must pour les passionnes. A signaler le design est moderne et energique, ce qui rend chaque session plus palpitante. Un bonus les evenements communautaires vibrants, qui dynamise l’engagement.
Passer à l’action|
J’adore l’energie de Cheri Casino, c’est un lieu ou l’adrenaline coule a flots. On trouve une gamme de jeux eblouissante, comprenant des titres adaptes aux cryptomonnaies. Il offre un demarrage en fanfare. Le support est pro et accueillant. Les gains arrivent en un eclair, occasionnellement des recompenses supplementaires seraient parfaites. En bref, Cheri Casino garantit un plaisir constant. Par ailleurs la plateforme est visuellement vibrante, ce qui rend chaque session plus excitante. A noter les options variees pour les paris sportifs, offre des bonus exclusifs.
Cliquer pour voir|
J’ai une passion debordante pour Instant Casino, il propose une aventure palpitante. La bibliotheque est pleine de surprises, avec des slots aux designs captivants. Le bonus de depart est top. Le service client est excellent. Les transactions sont d’une fiabilite absolue, bien que quelques tours gratuits supplementaires seraient cool. En somme, Instant Casino est une plateforme qui pulse. Par ailleurs l’interface est intuitive et fluide, permet une plongee totale dans le jeu. A mettre en avant les transactions crypto ultra-securisees, garantit des paiements rapides.
Savoir plus|
Je suis totalement conquis par Instant Casino, il cree une experience captivante. Il y a une abondance de jeux excitants, avec des machines a sous aux themes varies. Le bonus d’inscription est attrayant. Les agents sont rapides et pros. Les paiements sont securises et instantanes, par ailleurs des bonus varies rendraient le tout plus fun. Globalement, Instant Casino assure un fun constant. De plus l’interface est intuitive et fluide, apporte une energie supplementaire. A souligner les evenements communautaires pleins d’energie, propose des avantages uniques.
Rejoindre maintenant|
Hi, after reading this awesome paragraph i am also cheerful to share my knowledge here with mates.
https://kerrazzo.com/2025/10/19/melbet-zerkalo-2025-dostup-k-stavkam/
findsomethingunique – Interesting finds here, definitely stands out from regular online stores.
подробнее кра сайт
discovermoretoday – Helpful and easy to navigate site, offers something new each time.
thebestcorner – Simple and strong branding—makes you believe you found a great spot for deals.
Certainly. And I have faced it. Let’s discuss this question. Here or in PM.
90’lar modas?n? hat?rlayanlar burada m?? Sizlere gecmisin moda ikonu olan donemden ilhamla ipuclar? sundugumuz bu yaz?ya davetlisiniz.
Зацепил материал про Guzellik ve Kozmetik: 90’lar Modas?ndan Ipuclar?.
Смотрите сами:
https://aynakirildi.com
90’lar?n guzellik s?rlar?yla tarz?n?za yeni bir soluk kazand?rabilirsiniz. Eski moda, yeni size ilham olsun!
Веб сайт https://urkarl.ru/
yourfavoritestore – Everything feels organized and simple, loved the product variety here.
creativegiftplace – The user experience was smooth and the visuals were appealing.
startsomethingawesome – Excited to try their items, the presentation is awesome and inviting.
simplystylishstore – I’ll definitely bookmark this site for my next wardrobe refresh.
simplelivingstore – Found a few items I’m bookmarking now—this store has a nice mix of practical and stylish.
discoverpossibility – Quick load times and easy to explore—made the visit nice and effortless.
shopwithpurpose – Great concept and thoughtful message behind this platform, I like it.
dreamcreateachieve – The tone feels genuine, not just hype—makes the content easy to connect with.
проверить сайт kra43.cc
modernhometrends – Found several stylish pieces and modern touches that would look great in any space.
startsomethingawesome – The content layout is clean and energetic, made exploring very enjoyable.
growtogethercommunity – The design is clean and welcoming, made me feel like part of something positive.
thebestcorner – Found this randomly today, looks neat and works perfectly fine.
modernhometrends – Found this site today, everything looks sleek and well organized.
узнать больше Здесь kraken
discoverfreshperspectives – The site offers new angles that helped me see things from a different point of view.
yourdailyessentials – Found several items I actually needed today—nice find!
unlocknewpotential – Surprised how well organized and up-to-date everything seems.
dailychoicecorner – Found useful everyday items here, really liked how clean it looks.
J’ai un veritable coup de c?ur pour Frumzi Casino, c’est un lieu ou l’adrenaline coule a flots. Il y a un eventail de titres captivants, offrant des sessions live palpitantes. Il donne un avantage immediat. Les agents repondent avec efficacite. Les paiements sont surs et fluides, quelquefois des recompenses supplementaires dynamiseraient le tout. En bref, Frumzi Casino est une plateforme qui fait vibrer. Pour couronner le tout la navigation est fluide et facile, apporte une energie supplementaire. Particulierement attrayant les competitions regulieres pour plus de fun, garantit des paiements rapides.
https://frumzicasinobonusfr.com/|
J’ai une affection particuliere pour Wild Robin Casino, ca invite a plonger dans le fun. La selection de jeux est impressionnante, comprenant des titres adaptes aux cryptomonnaies. Avec des transactions rapides. Le support est efficace et amical. Les retraits sont lisses comme jamais, de temps en temps des bonus varies rendraient le tout plus fun. En resume, Wild Robin Casino est une plateforme qui pulse. A noter le site est rapide et style, facilite une immersion totale. Un point cle les transactions crypto ultra-securisees, propose des avantages uniques.
Wild Robin|
J’adore l’ambiance electrisante de Cheri Casino, il cree une experience captivante. Les titres proposes sont d’une richesse folle, offrant des tables live interactives. Il offre un demarrage en fanfare. Les agents repondent avec rapidite. Les paiements sont securises et instantanes, a l’occasion des bonus diversifies seraient un atout. En somme, Cheri Casino vaut une visite excitante. En extra la navigation est fluide et facile, facilite une immersion totale. Un avantage notable les evenements communautaires pleins d’energie, offre des recompenses regulieres.
Aller sur le site web|
Je suis epate par Cheri Casino, c’est une plateforme qui deborde de dynamisme. La bibliotheque de jeux est captivante, proposant des jeux de table sophistiques. Le bonus de bienvenue est genereux. Le suivi est impeccable. Les retraits sont ultra-rapides, neanmoins des offres plus genereuses rendraient l’experience meilleure. En conclusion, Cheri Casino est un incontournable pour les joueurs. Par ailleurs l’interface est intuitive et fluide, ce qui rend chaque session plus palpitante. Un point fort les tournois reguliers pour s’amuser, garantit des paiements securises.
DГ©couvrir plus|
проститутка метро потапова Порно с проституткой: Искаженная реальность, эксплуатация слабости. Зеркало похоти, отражающее темные стороны человеческой натуры.
J’ai un veritable coup de c?ur pour Instant Casino, il offre une experience dynamique. Le catalogue est un tresor de divertissements, avec des machines a sous aux themes varies. 100% jusqu’a 500 € avec des free spins. Les agents sont rapides et pros. Le processus est simple et transparent, occasionnellement quelques free spins en plus seraient bienvenus. En resume, Instant Casino garantit un plaisir constant. En extra le design est moderne et attrayant, donne envie de continuer l’aventure. Egalement genial les paiements en crypto rapides et surs, garantit des paiements securises.
Aller voir|
90’lar modas?n? hat?rlayanlar burada m?? Sizlere gecmisin moda ikonu olan donemden ilhamla ipuclar? sundugumuz bu yaz?ya davetlisiniz.
Кстати, если вас интересует Guzellik ve Kozmetik: Trendler ve Ipuclar?, посмотрите сюда.
Ссылка ниже:
https://guzellikturk.com
Tarz?n?zda 90’lar?n esintilerini hissetmeye baslad?g?n?za eminim. Gecmisin izlerini tas?maktan korkmay?n!
на этом сайте кракен сайт
purefashionhub – Stylish layout with trendy fashion options, easy to browse and shop.
Смотреть здесь kra cc
Backlinks for your site
Applicable throughout all themes of the resource.
I create backlinks to your site.
These links attract Google crawlers to the site, this significantly impacts for search visibility, hence it’s critical to promote a platform free of errors that will interfere with visibility.
Positioning is harmless for your site!
I don’t submit in feedback boxes, (contact forms can damage the platform since users file complaints from administrators).
Publication is executed in approved sources.
Backlinks are placed to current continuously refreshed list. Several portals in the repository.
smartshoppingplace – Smooth navigation and solid deals, feels trustworthy and efficient.
Website https://remonttermexov.ru/ .
Je suis completement seduit par Wild Robin Casino, ca donne une vibe electrisante. La gamme est variee et attrayante, incluant des paris sportifs en direct. Il offre un demarrage en fanfare. Le support est pro et accueillant. Les retraits sont ultra-rapides, a l’occasion quelques free spins en plus seraient bienvenus. Au final, Wild Robin Casino garantit un amusement continu. A signaler l’interface est lisse et agreable, incite a prolonger le plaisir. Un point fort les evenements communautaires vibrants, propose des avantages uniques.
Passer à l’action|
Je suis fascine par Wild Robin Casino, on ressent une ambiance festive. Les options de jeu sont incroyablement variees, proposant des jeux de table sophistiques. Il amplifie le plaisir des l’entree. Les agents sont toujours la pour aider. Les paiements sont surs et efficaces, neanmoins des offres plus genereuses seraient top. Dans l’ensemble, Wild Robin Casino est une plateforme qui fait vibrer. A souligner le site est rapide et immersif, incite a rester plus longtemps. A signaler les evenements communautaires engageants, offre des bonus constants.
Consulter les dГ©tails|
J’ai un faible pour Cheri Casino, c’est un lieu ou l’adrenaline coule a flots. Les options de jeu sont incroyablement variees, avec des machines a sous visuellement superbes. Avec des transactions rapides. Le suivi est d’une fiabilite exemplaire. Le processus est fluide et intuitif, par moments plus de promos regulieres dynamiseraient le jeu. Dans l’ensemble, Cheri Casino est un immanquable pour les amateurs. Pour couronner le tout la navigation est claire et rapide, permet une immersion complete. Egalement excellent les evenements communautaires engageants, propose des privileges personnalises.
VГ©rifier ceci|
Je suis enthousiaste a propos de Instant Casino, il cree un monde de sensations fortes. Le catalogue est un paradis pour les joueurs, incluant des paris sportifs pleins de vie. Le bonus initial est super. Le service client est de qualite. Les gains arrivent sans delai, neanmoins quelques tours gratuits supplementaires seraient cool. En resume, Instant Casino est un must pour les passionnes. Notons egalement la plateforme est visuellement vibrante, incite a prolonger le plaisir. Un element fort les evenements communautaires vibrants, garantit des paiements rapides.
Cliquez ici|
J’adore l’energie de Frumzi Casino, ca offre une experience immersive. Les jeux proposes sont d’une diversite folle, comprenant des titres adaptes aux cryptomonnaies. 100% jusqu’a 500 € plus des tours gratuits. Le support est rapide et professionnel. Les gains arrivent sans delai, bien que des offres plus genereuses seraient top. En resume, Frumzi Casino garantit un amusement continu. De plus le site est rapide et immersif, donne envie de continuer l’aventure. Un point cle les tournois frequents pour l’adrenaline, offre des bonus exclusifs.
Approfondir|
Tarz?n?z? 90’lar?n unutulmaz modas?ndan esinlenerek gunumuze tas?mak ister misiniz? Oyleyse bu yaz?m?z tam size gore!
Для тех, кто ищет информацию по теме “Guzellik ve Kozmetik: 90’lar Modas?ndan Ipuclar?”, там просто кладезь информации.
Смотрите сами:
https://aynakirildi.com
Nostalji dolu bu yolculukta bizimle oldugunuz icin tesekkur ederiz. 90’lar modas? ve guzelliginin ruhunu hissedin.
J’adore l’energie de Instant Casino, ca offre un plaisir vibrant. On trouve une gamme de jeux eblouissante, avec des slots aux designs captivants. Le bonus initial est super. Le support est pro et accueillant. Les gains sont verses sans attendre, par contre plus de promotions variees ajouteraient du fun. Pour faire court, Instant Casino est un endroit qui electrise. En extra la plateforme est visuellement electrisante, ajoute une touche de dynamisme. A signaler les transactions en crypto fiables, offre des bonus constants.
Touchez ici|
staymotivatedalways – Positive and uplifting space, love reading motivational content here.
code promo de 1xbet
миксер маз Цена: Приобретение техники МАЗ по выгодной цене – это реальность. Разнообразие финансовых программ и лизинговых предложений. Оптимальное соотношение цены и качества.
Веб сайт https://urkarl.ru/
freshstyleoutlet – Modern and clean design, great mix of new fashion trends and ideas.
moveforwardnow – Just discovered this site, excited to explore more of what they offer.
discoverpossibility – Found some interesting pieces here, definitely will come back later.
modernstylemarket – Nice user experience so far—everything loads quickly and feels well organised.
growtogethercommunity – Really enjoy the overall aesthetic, feels trustworthy and well-designed.
shopthenexttrend – Full of trendy items, exactly what I was searching for today.
discoverbetterdeals – The layout is modern and easy on the eyes, nice job with design.
urbanwearoutlet – Good first impression, site loads fast and layout is well structured.
everydayinnovation – Good find! Looks like a place worth revisiting when I have more time.
thefashionedit – Really like the aesthetic and vibe, feels stylish and welcoming.
learnexploreachieve – Nice find! The tone of the site is inviting and professional.
explorecreativeconcepts – Really like the style and the feel of this site, very fresh.
learnandthrive – Engaging platform for self-growth, content feels genuine and very useful.
explorecreativeconcepts – The site’s tone is friendly and approachable, which makes it feel trustworthy.
reachhighergoals – Nice website overall, seems trustworthy and well put-together.
buildthefuture – Overall experience is positive, it’s well-put-together and shows attention to detail.
dealsanddiscounts – I like the aesthetic and how easy it is to navigate so far.
посмотреть на этом сайте https://kra44at.at
90’lar modas?n? hat?rlayanlar burada m?? Sizlere gecmisin moda ikonu olan donemden ilhamla ipuclar? sundugumuz bu yaz?ya davetlisiniz.
Особенно понравился раздел про Guzellik ve Kozmetik: 90’lar Modas?ndan Ipuclar?.
Ссылка ниже:
https://aynakirildi.com
90’lar?n buyusunu modern dunyaya tas?mak hic bu kadar kolay olmam?st?. Unutulmayan bu donemin guzellik s?rlar?n? unutmay?n!
https://parachutetour.com
Website https://photo-res.ru/ .
asbest.name http://salda.ws/f/topic.php?p=239434 .
турниры казино
With havin so much content and articles do you ever run into any problems of plagorism or copyright violation? My blog has a lot of
exclusive content I’ve either authored myself
or outsourced but it appears a lot of it is popping it up all over the internet without my authorization. Do you know any solutions to help protect against content
from being stolen? I’d really appreciate it.
Review my webpage :: zinnat02
выберите ресурсы kra45.cc
нажмите здесь kra43.cc
J’adore l’energie de Wild Robin Casino, on ressent une ambiance de fete. Les titres proposes sont d’une richesse folle, avec des slots aux designs captivants. Le bonus de bienvenue est genereux. Le service client est excellent. Les gains sont transferes rapidement, en revanche plus de promos regulieres dynamiseraient le jeu. En somme, Wild Robin Casino merite un detour palpitant. En plus le design est moderne et energique, amplifie l’adrenaline du jeu. Un avantage les options de paris sportifs diversifiees, offre des bonus constants.
Apprendre comment|
Je suis epate par Wild Robin Casino, c’est un lieu ou l’adrenaline coule a flots. La selection est riche et diversifiee, comprenant des titres adaptes aux cryptomonnaies. Il booste votre aventure des le depart. Disponible 24/7 pour toute question. Les transactions sont fiables et efficaces, par ailleurs des bonus plus frequents seraient un hit. Au final, Wild Robin Casino garantit un amusement continu. Pour ajouter le design est moderne et energique, donne envie de continuer l’aventure. Particulierement attrayant le programme VIP avec des privileges speciaux, offre des recompenses regulieres.
Explorer davantage|
J’adore l’ambiance electrisante de Wild Robin Casino, ca pulse comme une soiree animee. Les titres proposes sont d’une richesse folle, incluant des paris sur des evenements sportifs. Il rend le debut de l’aventure palpitant. Les agents repondent avec efficacite. Le processus est clair et efficace, toutefois des recompenses supplementaires seraient parfaites. En fin de compte, Wild Robin Casino est une plateforme qui fait vibrer. A souligner le site est rapide et style, facilite une immersion totale. Un point cle les tournois reguliers pour la competition, cree une communaute soudee.
Lire la suite|
Je suis completement seduit par Cheri Casino, ca offre une experience immersive. La selection de jeux est impressionnante, avec des slots aux graphismes modernes. Le bonus d’inscription est attrayant. Le support client est irreprochable. Les gains arrivent en un eclair, cependant des offres plus consequentes seraient parfaites. En bref, Cheri Casino est un immanquable pour les amateurs. Ajoutons que la plateforme est visuellement electrisante, ce qui rend chaque partie plus fun. Un bonus les evenements communautaires engageants, qui stimule l’engagement.
AccГ©der maintenant|
J’adore le dynamisme de Cheri Casino, on y trouve une vibe envoutante. Le catalogue est un tresor de divertissements, avec des machines a sous visuellement superbes. Le bonus d’inscription est attrayant. Le service d’assistance est au point. Les transactions sont d’une fiabilite absolue, de temps en temps plus de promos regulieres dynamiseraient le jeu. Pour finir, Cheri Casino est une plateforme qui fait vibrer. A signaler la navigation est simple et intuitive, amplifie le plaisir de jouer. Particulierement cool les evenements communautaires vibrants, garantit des paiements rapides.
Obtenir plus|
Je suis accro a Cheri Casino, on ressent une ambiance festive. La bibliotheque est pleine de surprises, incluant des paris sportifs en direct. Il rend le debut de l’aventure palpitant. Le support est pro et accueillant. Les gains sont transferes rapidement, mais encore plus de promos regulieres dynamiseraient le jeu. Pour conclure, Cheri Casino est une plateforme qui fait vibrer. Par ailleurs le design est tendance et accrocheur, booste le fun du jeu. Un point cle les options de paris sportifs variees, propose des avantages uniques.
Cheri|
Je suis epate par Frumzi Casino, ca transporte dans un univers de plaisirs. Il y a une abondance de jeux excitants, offrant des tables live interactives. Le bonus de bienvenue est genereux. Le support est fiable et reactif. Les paiements sont surs et efficaces, de temps en temps des bonus diversifies seraient un atout. Globalement, Frumzi Casino merite une visite dynamique. Notons egalement la plateforme est visuellement vibrante, permet une plongee totale dans le jeu. Particulierement fun les paiements en crypto rapides et surs, cree une communaute soudee.
Touchez ici|
J’ai une affection particuliere pour Instant Casino, ca transporte dans un univers de plaisirs. Le catalogue de titres est vaste, offrant des tables live interactives. 100% jusqu’a 500 € avec des free spins. Les agents repondent avec efficacite. Les transactions sont toujours securisees, parfois des bonus varies rendraient le tout plus fun. Pour finir, Instant Casino assure un divertissement non-stop. A mentionner le site est rapide et immersif, ce qui rend chaque moment plus vibrant. Un point cle les options de paris sportifs diversifiees, propose des privileges sur mesure.
Plonger dedans|
Подробнее здесь kra43 at
куплю диплом медсестры в москве куплю диплом медсестры в москве .
купить диплом жд техникума купить диплом жд техникума .
90’lar modas?n? hat?rlayanlar burada m?? Sizlere gecmisin moda ikonu olan donemden ilhamla ipuclar? sundugumuz bu yaz?ya davetlisiniz.
Кстати, если вас интересует Ev Dekorasyonunda S?kl?k ve Fonksiyonellik, посмотрите сюда.
Вот, делюсь ссылкой:
https://evimsicak.com
90’lar?n buyusunu modern dunyaya tas?mak hic bu kadar kolay olmam?st?. Unutulmayan bu donemin guzellik s?rlar?n? unutmay?n!
Metabolic Freedom provides a realistic, personalized approach to fixing your metabolism in 30 days. https://metabolicfreedom.top/ metabolic freedom book pdf pdf free download
взгляните на сайте здесь kra43 at
взгляните на сайте здесь
кракен переходник
**hepatoburn**
hepatoburn is a potent, plant-based formula created to promote optimal liver performance and naturally stimulate fat-burning mechanisms.
Узнать больше
vodkabet прямо сейчас
нажмите здесь
CS BOX
перейдите на этот сайт
kraken
findyourowngrowth – I’ll bookmark this one, looks like a helpful resource for growth and ideas.
Онлайн казино Україна пропонують бонуси за реєстрацію. Кращі провайдери слотів пропонують захопливі автомати для українців.
Українські інтернет казино мають прозорі умови для гравців. Шукаєте надійну «вітрину» з відгуками та перевіреними ліцензіями? Скористайтесь ліцензійні казино україни. Онлайн казино Україна має зручні мобільні версії.
Рейтинг казино Україна створено на основі реальних відгуків. Онлайн казино Україна на гривні приваблює бонусами та кешбеком. Українські онлайн казино забезпечують миттєві виплати виграшів. Ліцензійні казино України працюють офіційно та прозоро. Ліцензійні казино України пропонують чесні акції для всіх.
Tarz?n?z? 90’lar?n unutulmaz modas?ndan esinlenerek gunumuze tas?mak ister misiniz? Oyleyse bu yaz?m?z tam size gore!
Между прочим, если вас интересует Ev Dekorasyonunda Modern ve Estetik Cozumler, посмотрите сюда.
Вот, можете почитать:
https://evimturk.com
Guzellik, gecmisle gunumuz aras?nda bir kopru kurmakt?r. 90’lar?n moda s?rlar?, bu koprunun onemli parcalar?ndan.
Je suis sous le charme de Frumzi Casino, on y trouve une vibe envoutante. Les titres proposes sont d’une richesse folle, avec des slots aux designs captivants. Avec des transactions rapides. Les agents sont toujours la pour aider. Les paiements sont surs et efficaces, cependant des recompenses additionnelles seraient ideales. Pour conclure, Frumzi Casino est un must pour les passionnes. A noter le site est rapide et engageant, permet une immersion complete. Egalement genial les options de paris sportifs diversifiees, cree une communaute vibrante.
Voir le site|
J’ai une affection particuliere pour Wild Robin Casino, ca invite a plonger dans le fun. Le choix est aussi large qu’un festival, proposant des jeux de cartes elegants. Il donne un avantage immediat. Le service est disponible 24/7. Les gains arrivent sans delai, mais plus de promos regulieres dynamiseraient le jeu. Globalement, Wild Robin Casino est un immanquable pour les amateurs. En extra le design est tendance et accrocheur, ajoute une vibe electrisante. Un atout les transactions en crypto fiables, assure des transactions fiables.
Poursuivre la lecture|
J’ai une passion debordante pour Frumzi Casino, on y trouve une energie contagieuse. Le choix est aussi large qu’un festival, comprenant des jeux crypto-friendly. Avec des depots rapides et faciles. Le support est fiable et reactif. Les paiements sont surs et fluides, parfois des bonus plus frequents seraient un hit. En bref, Frumzi Casino est un must pour les passionnes. De plus le design est tendance et accrocheur, donne envie de continuer l’aventure. Un point fort les transactions en crypto fiables, cree une communaute vibrante.
Visiter en ligne|
взгляните на сайте здесь
casino vodka
findyourperfectlook – Love how the style is presented, makes the site quite inviting.
Je suis captive par Wild Robin Casino, ca donne une vibe electrisante. La bibliotheque est pleine de surprises, proposant des jeux de casino traditionnels. Le bonus de bienvenue est genereux. Le support est pro et accueillant. Les paiements sont securises et instantanes, de temps a autre des bonus plus varies seraient un plus. Globalement, Wild Robin Casino vaut une visite excitante. Par ailleurs l’interface est intuitive et fluide, permet une plongee totale dans le jeu. Un avantage notable les paiements securises en crypto, assure des transactions fluides.
DГ©couvrir le web|
mystylezone – Just discovered this site, the look is clean and inviting.
Je suis enthousiasme par Cheri Casino, il cree un monde de sensations fortes. Le choix est aussi large qu’un festival, comprenant des titres adaptes aux cryptomonnaies. Le bonus initial est super. Le service est disponible 24/7. Les transactions sont fiables et efficaces, cependant des recompenses supplementaires dynamiseraient le tout. En bref, Cheri Casino vaut une visite excitante. En plus l’interface est lisse et agreable, incite a prolonger le plaisir. Particulierement attrayant les tournois reguliers pour la competition, propose des privileges sur mesure.
https://chericasinologinfr.com/|
Je suis enthousiasme par Instant Casino, ca invite a l’aventure. Les jeux proposes sont d’une diversite folle, comprenant des jeux optimises pour Bitcoin. Il propulse votre jeu des le debut. Les agents sont toujours la pour aider. Le processus est transparent et rapide, rarement des bonus diversifies seraient un atout. Pour conclure, Instant Casino offre une experience hors du commun. En complement le design est moderne et energique, ce qui rend chaque moment plus vibrant. Egalement top le programme VIP avec des avantages uniques, cree une communaute vibrante.
Rejoindre maintenant|
styleandfashion – Great first impression, feel and style match nicely with expectations.
Je suis completement seduit par Cheri Casino, ca transporte dans un univers de plaisirs. Le catalogue est un paradis pour les joueurs, incluant des options de paris sportifs dynamiques. Il booste votre aventure des le depart. Le service est disponible 24/7. Les gains arrivent sans delai, mais encore quelques tours gratuits supplementaires seraient cool. Pour conclure, Cheri Casino est un choix parfait pour les joueurs. Notons aussi la navigation est intuitive et lisse, facilite une experience immersive. A signaler le programme VIP avec des avantages uniques, qui motive les joueurs.
Obtenir les dГ©tails|
Je suis fascine par Instant Casino, ca pulse comme une soiree animee. Les titres proposes sont d’une richesse folle, incluant des paris sportifs en direct. Le bonus initial est super. Le service est disponible 24/7. Les retraits sont lisses comme jamais, occasionnellement des recompenses supplementaires seraient parfaites. Pour finir, Instant Casino garantit un plaisir constant. De plus l’interface est lisse et agreable, facilite une immersion totale. Egalement excellent les competitions regulieres pour plus de fun, assure des transactions fiables.
Rejoindre maintenant|
Je suis emerveille par Frumzi Casino, on y trouve une energie contagieuse. On trouve une profusion de jeux palpitants, incluant des options de paris sportifs dynamiques. Le bonus de depart est top. Le suivi est d’une precision remarquable. Les paiements sont securises et instantanes, quelquefois plus de promos regulieres ajouteraient du peps. Pour conclure, Frumzi Casino assure un fun constant. A mentionner l’interface est fluide comme une soiree, amplifie l’adrenaline du jeu. A mettre en avant les evenements communautaires engageants, garantit des paiements securises.
Rejoindre maintenant|
everydayvaluehub – The site’s aesthetic is consistent and professional, nice work.
https://shkola-vocala.ru/shkola-igry-na-gitare.php
Казино з ліцензією КРАІЛ працюють офіційно та захищають гравців. Онлайн казино на гривні робить гру ще зручнішою.
Українські онлайн казіно активно впроваджують нові технології. Огляди, поради та добірки слотів з RTP — все тут: http://casino-ua-online.biz.ua/. Онлайн казино Україна має зручні мобільні версії.
Українські казино онлайн мають сучасні мобільні додатки. Онлайн казино Україна на гривні приваблює бонусами та кешбеком. Українські онлайн казино забезпечують миттєві виплати виграшів. Легальні онлайн казино України підтримують гривню. Онлайн казино Україна пропонує сучасні способи поповнення.
продолжить https://kra44cc.at/
Подробнее https://kra44at.at/
этот контент
Кракин
выберите ресурсы
vodkabet новый сайт
Рейтинг казино онлайн Україна допомагає знайти перевірені платформи. Кращі провайдери слотів пропонують захопливі автомати для українців.
Рейтинг казино онлайн Україна щомісяця оновлюється. Шукаєте надійну «вітрину» з відгуками та перевіреними ліцензіями? Скористайтесь ліцензійні казино україни. Українські онлайн казино — гарантія легальної гри.
Легальні казино України забезпечують гравцям чесні виплати. Українські казино з ліцензією забезпечують повну безпеку користувачів. Ліцензійні казино України мають сучасні мобільні платформи. Легальні онлайн казино України підтримують гривню. Українські онлайн казино з ліцензією — це безпечний вибір.
казино лучше
страница
kraken
Plateforme parifoot rd congo : pronos fiables, comparateur de cotes multi-books, tendances du marche, cash-out, statistiques avancees. Depots via M-Pesa/Airtel Money, support francophone, retraits securises. Pariez avec moderation.
Paris sportifs avec 1xbet rdc apk : pre-match & live, statistiques, cash-out, builder de paris. Bonus d’inscription, programme fidelite, appli mobile. Depots via M-Pesa/Airtel Money. Informez-vous sur la reglementation. 18+, jouez avec moderation.
Оформите онлайн-займ https://zaimy-89.ru без визита в офис: достаточно паспорта, проверка за минуты. Выдача на карту, кошелёк или счёт. Прозрачный договор, напоминания о платеже, безопасность данных, акции для новых клиентов. Сравните предложения и выберите выгодно.
снят проститутки московский областей Проститутки г: Безымянность, обезличивание, забвение. Пешки в чужой игре, тени, скользящие по улицам.
Казино з українським інтерфейсом набагато зручніші для гри. Легальні казино України — це комфорт і довіра.
Українські онлайн казіно активно впроваджують нові технології. Потрібні варіанти з UAH та швидким кешаутом? Дивіться онлайн казино україна на гривні і перевірені методи виплат. Казино з миттєвим виводом дозволяють отримати виграш без очікування.
Казино з українським інтерфейсом має зрозумілу навігацію. Онлайн казино Україна на гривні приваблює бонусами та кешбеком. Онлайн казино Україна пропонує бонуси за перший депозит. Казино з миттєвим виводом виграшів — вибір досвідчених гравців. Кращі казино України пропонують високий RTP і чесну гру.
Обновления по теме здесь: https://fotoredaktor.top
нажмите, чтобы подробнее
kra43.at
90’lar modas?n?n guzellik s?rlar?yla gunumuzun trendlerine meydan okumaya ne dersiniz?
Хочу выделить раздел про Guzellik ve Kozmetik: Trendler ve Ipuclar?.
Вот, можете почитать:
https://guzellikturk.com
Guzellik, gecmisle gunumuz aras?nda bir kopru kurmakt?r. 90’lar?n moda s?rlar?, bu koprunun onemli parcalar?ndan.
https://narkolog-na-dom-spb2.ru/
Does it look like we’re in for a big ride here?
смотреть здесь
сайт кракена
https://yurhelp.in.ua/
Looking to betwinner create account fast? Go to https://bet-promo-codes.com/sportsbook-reviews/betwinner-registration/ and complete the simple sign-up form in just a few clicks.
Russian Certified Translation Services in the UK
If your business or clients require Russian diploma translation London, you can depend on our team for professional, officially recognised translations between Russian and English. Each translation is accompanied by a signed Certificate of Accuracy, confirming that it is a true and faithful representation of the original document — suitable for submission to UK authorities, courts, and institutions.
We translate a wide range of business, legal, and personal documents, including:
• Contracts, agreements, and powers of attorney
• Birth, marriage, and divorce certificates
• Academic diplomas, transcripts, and qualifications
• Court judgments, police clearance certificates, and legal correspondence
• Property sale, purchase, and lease agreements
• Financial statements, annual reports, and tax records
• Company registration and incorporation documents
• Employment references and immigration paperwork
Our certified Russian translations are accepted across the United Kingdom by:
• The Home Office (for visa and immigration purposes)
• HM Passport Office
• UK Visas and Immigration (UKVI)
• Courts of England and Wales
• Solicitors, notaries, and legal professionals
• Universities, colleges, and UK ENIC/NARIC
• Banks, insurance firms, and corporate compliance departments
We also prepare translations for submission to the Embassy of the Russian Federation in London, the Consular Section of the Russian Embassy, and the Russian Consulate in Edinburgh, making them suitable for cross-border legal, academic, and commercial use.
All translations are completed by qualified native Russian translators with expertise in legal, financial, and technical terminology. Every document is carefully formatted to reflect the layout of the original and is delivered electronically in MS Word or PDF format.
Whether for corporate compliance, international business, immigration, or education, our certified Russian translation services guarantee accuracy, confidentiality, and full acceptance by UK authorities, helping businesses and individuals communicate with confidence in both the UK and Russian-speaking markets.
https://shkola-vocala.ru/shkola-igry-na-gitare.php
нарколог на дом санкт-петербург
J’ai une affection particuliere pour Wild Robin Casino, il procure une sensation de frisson. Le catalogue est un paradis pour les joueurs, comprenant des jeux compatibles avec les cryptos. Il offre un coup de pouce allechant. Le suivi est d’une precision remarquable. Les gains arrivent en un eclair, de temps a autre des recompenses en plus seraient un bonus. Globalement, Wild Robin Casino offre une aventure inoubliable. En extra la navigation est intuitive et lisse, ce qui rend chaque session plus excitante. Particulierement cool les tournois frequents pour l’adrenaline, qui motive les joueurs.
Jeter un coup d’œil|
Je suis completement seduit par Instant Casino, ca invite a plonger dans le fun. Les options de jeu sont incroyablement variees, incluant des options de paris sportifs dynamiques. Le bonus d’inscription est attrayant. Le service client est de qualite. Les gains arrivent en un eclair, de temps en temps des offres plus importantes seraient super. Globalement, Instant Casino assure un divertissement non-stop. A mentionner la plateforme est visuellement dynamique, ce qui rend chaque session plus palpitante. A souligner les evenements communautaires pleins d’energie, cree une communaute soudee.
Voir la page|
J’ai une passion debordante pour Wild Robin Casino, on y trouve une vibe envoutante. On trouve une gamme de jeux eblouissante, incluant des options de paris sportifs dynamiques. 100% jusqu’a 500 € + tours gratuits. Le support client est irreprochable. Les paiements sont securises et rapides, cependant plus de promotions variees ajouteraient du fun. Au final, Wild Robin Casino assure un fun constant. De plus la navigation est claire et rapide, donne envie de prolonger l’aventure. Egalement genial les evenements communautaires engageants, offre des recompenses regulieres.
VГ©rifier ceci|
90’lar modas?n? hat?rlayanlar burada m?? Sizlere gecmisin moda ikonu olan donemden ilhamla ipuclar? sundugumuz bu yaz?ya davetlisiniz.
Особенно понравился раздел про Guzellik ve Kozmetik: 90’lar Modas?ndan Ipuclar?.
Вот, делюсь ссылкой:
https://aynakirildi.com
90’lar?n guzellik s?rlar?yla tarz?n?za yeni bir soluk kazand?rabilirsiniz. Eski moda, yeni size ilham olsun!
Je suis captive par Instant Casino, c’est une plateforme qui deborde de dynamisme. La selection de jeux est impressionnante, incluant des paris sportifs en direct. Il booste votre aventure des le depart. Le support est pro et accueillant. Les gains arrivent sans delai, occasionnellement des offres plus genereuses rendraient l’experience meilleure. En somme, Instant Casino offre une aventure memorable. De surcroit la plateforme est visuellement dynamique, facilite une experience immersive. Un avantage notable les evenements communautaires vibrants, propose des avantages sur mesure.
Trouver les dГ©tails|
Je suis enthousiaste a propos de Cheri Casino, ca invite a plonger dans le fun. Il y a un eventail de titres captivants, proposant des jeux de table classiques. Il donne un avantage immediat. Le support est pro et accueillant. Les retraits sont ultra-rapides, parfois des offres plus importantes seraient super. Au final, Cheri Casino est une plateforme qui pulse. En plus le site est rapide et engageant, ce qui rend chaque session plus excitante. Un avantage notable les tournois frequents pour l’adrenaline, propose des privileges personnalises.
Explorer plus|
J’ai une affection particuliere pour Frumzi Casino, ca offre une experience immersive. La gamme est variee et attrayante, comprenant des jeux optimises pour Bitcoin. Avec des depots instantanes. Le support est efficace et amical. Les paiements sont securises et rapides, toutefois des bonus diversifies seraient un atout. Dans l’ensemble, Frumzi Casino assure un fun constant. A mentionner l’interface est lisse et agreable, booste l’excitation du jeu. A noter les nombreuses options de paris sportifs, cree une communaute soudee.
DГ©couvrir le web|
J’adore l’ambiance electrisante de Instant Casino, ca transporte dans un monde d’excitation. Le catalogue est un tresor de divertissements, comprenant des jeux optimises pour Bitcoin. Avec des depots rapides et faciles. Le service client est de qualite. Les retraits sont ultra-rapides, malgre tout des offres plus genereuses seraient top. En bref, Instant Casino assure un fun constant. Par ailleurs la navigation est claire et rapide, ce qui rend chaque moment plus vibrant. Egalement super les transactions crypto ultra-securisees, renforce le lien communautaire.
Explorer le site|
Якщо шукаєте казино з миттєвим виводом — обирайте перевірені українські сайти. Українське казино з ліцензією гарантує безпеку кожного депозиту.
Кращі онлайн казино України мають ліцензію КРАІЛ. Зручно почати з оглядового хабу: casino-ua-online biz ua. Кращі казино України мають позитивні відгуки гравців.
Кращі онлайн казино України оновлюють асортимент слотів щотижня. Онлайн казино Україна на гривні приваблює бонусами та кешбеком. Ліцензійні казино України мають сучасні мобільні платформи. Онлайн казино України пропонують акції та фріспіни щотижня. Кращі казино України пропонують високий RTP і чесну гру.
аренда погрузчика экскаватора https://www.arenda-ekskavatora-pogruzchika-2.ru .
Sizi gecmisten ilham alan guzellik ipuclar?yla dolu bu nostaljik yolculuga davet ediyoruz. 90’lar modas?n?n s?rlar?na goz atal?m m??
Кстати, если вас интересует Guzellik ve Kozmetik: Trendler ve Ipuclar?, посмотрите сюда.
Ссылка ниже:
https://guzellikturk.com
90’lar?n guzellik s?rlar?yla tarz?n?za yeni bir soluk kazand?rabilirsiniz. Eski moda, yeni size ilham olsun!
?Te sientes agotado por el drama constante? La salida esta en soltar lo que no depende de ti. https://lateorialetthem.top/ libro the let them theory
ремонт двигателей Honda https://telegra.ph/Dvigovichkoff–professionalnyj-remont-dvigatelej-v-Moskve-dlya-avtomobilej-premialnyh-marok-10-14/ .
студии для записи подкаста https://studiya-podkastov-spb4.ru/ .
https://seguridadsispe.com/?p=203078
куплю диплом медсестры в москве куплю диплом медсестры в москве .
J’adore la vibe de Wild Robin Casino, c’est une plateforme qui pulse avec energie. Le choix de jeux est tout simplement enorme, avec des machines a sous visuellement superbes. Avec des depots instantanes. Le suivi est impeccable. Les gains arrivent en un eclair, a l’occasion des bonus diversifies seraient un atout. Dans l’ensemble, Wild Robin Casino offre une experience hors du commun. A noter l’interface est lisse et agreable, ce qui rend chaque partie plus fun. Un avantage notable le programme VIP avec des avantages uniques, assure des transactions fluides.
Explorer maintenant|
J’ai une affection particuliere pour Frumzi Casino, il procure une sensation de frisson. La selection de jeux est impressionnante, comprenant des jeux optimises pour Bitcoin. 100% jusqu’a 500 € + tours gratuits. Les agents sont rapides et pros. Les paiements sont surs et efficaces, de temps a autre plus de promotions variees ajouteraient du fun. Dans l’ensemble, Frumzi Casino offre une aventure inoubliable. Pour ajouter le site est rapide et style, facilite une experience immersive. Un avantage les paiements securises en crypto, qui booste la participation.
Aller plus loin|
Je suis accro a Cheri Casino, c’est un lieu ou l’adrenaline coule a flots. Les options de jeu sont incroyablement variees, proposant des jeux de table classiques. Avec des depots instantanes. Disponible 24/7 par chat ou email. Les retraits sont lisses comme jamais, mais encore des recompenses supplementaires dynamiseraient le tout. En conclusion, Cheri Casino offre une experience inoubliable. De plus la plateforme est visuellement dynamique, incite a rester plus longtemps. Un avantage notable le programme VIP avec des privileges speciaux, renforce le lien communautaire.
Tout apprendre|
Je suis enthousiaste a propos de Instant Casino, il procure une sensation de frisson. Les jeux proposes sont d’une diversite folle, incluant des options de paris sportifs dynamiques. Il amplifie le plaisir des l’entree. Le suivi est d’une precision remarquable. Les gains arrivent en un eclair, a l’occasion plus de promotions frequentes boosteraient l’experience. Au final, Instant Casino est un choix parfait pour les joueurs. A souligner l’interface est lisse et agreable, ajoute une touche de dynamisme. A noter les tournois frequents pour l’adrenaline, qui motive les joueurs.
En savoir plus|
Je suis captive par Frumzi Casino, ca donne une vibe electrisante. Les options sont aussi vastes qu’un horizon, incluant des paris sportifs pleins de vie. Le bonus de depart est top. Le suivi est d’une precision remarquable. Les gains arrivent sans delai, neanmoins plus de promotions frequentes boosteraient l’experience. Dans l’ensemble, Frumzi Casino merite un detour palpitant. En complement la navigation est intuitive et lisse, booste l’excitation du jeu. Particulierement interessant les evenements communautaires dynamiques, propose des avantages sur mesure.
http://www.frumzicasinoappfr.com|
J’ai une passion debordante pour Wild Robin Casino, ca transporte dans un univers de plaisirs. On trouve une gamme de jeux eblouissante, proposant des jeux de casino traditionnels. Il offre un coup de pouce allechant. Les agents repondent avec rapidite. Les retraits sont fluides et rapides, par contre des bonus diversifies seraient un atout. Pour conclure, Wild Robin Casino garantit un amusement continu. De surcroit l’interface est intuitive et fluide, ce qui rend chaque session plus palpitante. Particulierement cool les options variees pour les paris sportifs, offre des recompenses regulieres.
VГ©rifier ceci|
Je suis enthousiasme par Instant Casino, ca invite a l’aventure. La gamme est variee et attrayante, offrant des tables live interactives. Avec des depots instantanes. Le suivi est impeccable. Le processus est simple et transparent, par moments des bonus plus varies seraient un plus. Pour conclure, Instant Casino est un endroit qui electrise. Pour couronner le tout le site est fluide et attractif, booste le fun du jeu. Particulierement interessant le programme VIP avec des niveaux exclusifs, qui motive les joueurs.
Voir la page d’accueil|
Je suis enthousiaste a propos de Cheri Casino, il cree un monde de sensations fortes. Le catalogue de titres est vaste, proposant des jeux de table classiques. Il offre un coup de pouce allechant. Les agents repondent avec efficacite. Les paiements sont surs et efficaces, cependant plus de promos regulieres dynamiseraient le jeu. En somme, Cheri Casino offre une experience inoubliable. Par ailleurs l’interface est fluide comme une soiree, amplifie l’adrenaline du jeu. Particulierement interessant les evenements communautaires vibrants, qui dynamise l’engagement.
Voir la page d’accueil|
Je suis epate par Frumzi Casino, ca invite a plonger dans le fun. La selection est riche et diversifiee, offrant des sessions live palpitantes. Il amplifie le plaisir des l’entree. Disponible a toute heure via chat ou email. Les retraits sont lisses comme jamais, a l’occasion plus de promos regulieres dynamiseraient le jeu. Dans l’ensemble, Frumzi Casino offre une experience hors du commun. Pour ajouter le design est moderne et energique, ce qui rend chaque session plus palpitante. A souligner le programme VIP avec des recompenses exclusives, qui motive les joueurs.
DГ©couvrir les faits|
казино онлайн с выводом
Sizi gecmisten ilham alan guzellik ipuclar?yla dolu bu nostaljik yolculuga davet ediyoruz. 90’lar modas?n?n s?rlar?na goz atal?m m??
Для тех, кто ищет информацию по теме “Ev Dekorasyonunda Modern ve Estetik Cozumler”, нашел много полезного.
Вот, можете почитать:
https://evimturk.com
90’lar modas?n?n guzellik s?rlar?n? kesfetmek, tarz?n?za farkl? bir boyut kazand?rabilir. Denemeye deger degil mi?
If most people wrote about this subject with the eloquence that you just did, I’m sure people would do much more than just read, they act. Great stuff here. Please keep it up.
купить диплом юриста купить диплом юриста .
помощь с зачетами синергия ЛМС МТИ: Интеллектуальная экосистема, оптимизирующая процесс обучения. Интерактивные курсы, адаптивные тесты, виртуальные лаборатории – инструменты, превращающие теорию в практику. Отслеживайте свой прогресс, общайтесь с преподавателями и совершенствуйте свои навыки в режиме реального времени.
Plateforme parifoot rd congo : pronos fiables, comparateur de cotes multi-books, tendances du marche, cash-out, statistiques avancees. Depots via M-Pesa/Airtel Money, support francophone, retraits securises. Pariez avec moderation.
Paris sportifs avec 1xbet cd apk : pre-match & live, statistiques, cash-out, builder de paris. Bonus d’inscription, programme fidelite, appli mobile. Depots via M-Pesa/Airtel Money. Informez-vous sur la reglementation. 18+, jouez avec moderation.
Все подробности по ссылке: https://buybuyviamen.com
90’lar modas?n? hat?rlayanlar burada m?? Sizlere gecmisin moda ikonu olan donemden ilhamla ipuclar? sundugumuz bu yaz?ya davetlisiniz.
Хочу выделить раздел про Guzellik ve Kozmetik: 90’lar Modas?ndan Ipuclar?.
Ссылка ниже:
https://aynakirildi.com
90’lar?n guzellik s?rlar?yla tarz?n?za yeni bir soluk kazand?rabilirsiniz. Eski moda, yeni size ilham olsun!
можно ли в колледже купить диплом можно ли в колледже купить диплом .
1 x bet 1xbet-9.com .
This 30-day journey helps you rebuild your metabolism so you can live with more energy and ease. https://metabolicfreedom.top/ metabolic freedom book pdf
Играю на 7k casino официальный сайт вечером после работы. Удобный интерфейс, не нужно долго разбираться. Вывод денег быстрый и без лишних вопросов https://xn—-8sbalwlcefxak4bw.xn--p1ai/
Job in korea IT-вакансии в Корее: Мечта для программистов и инженеров-разработчиков становится реальностью. Будущее создается здесь и сейчас! Высокие зарплаты, передовые проекты, работа в командах мирового уровня – все это ждет вас в корейской IT-индустрии. Разгонитесь до скорости света в мире искусственного интеллекта, блокчейна и кибербезопасности.
Eski ama asla eskimeyen 90’lar modas?n?n guzellik s?rlar?yla dolu bu yaz?da bulusal?m.
Между прочим, если вас интересует Evinizde Estetik ve Fonksiyonu Birlestirin: Ipuclar? ve Trendler, посмотрите сюда.
Вот, делюсь ссылкой:
https://anadolustil.com
90’lar?n guzellik s?rlar?yla tarz?n?za yeni bir soluk kazand?rabilirsiniz. Eski moda, yeni size ilham olsun!
Je suis epate par Wild Robin Casino, ca invite a l’aventure. Les options sont aussi vastes qu’un horizon, incluant des paris sportifs en direct. Le bonus d’inscription est attrayant. Disponible 24/7 par chat ou email. Les retraits sont fluides et rapides, parfois des bonus plus varies seraient un plus. En conclusion, Wild Robin Casino vaut une exploration vibrante. De plus le site est rapide et engageant, booste le fun du jeu. A souligner les competitions regulieres pour plus de fun, cree une communaute soudee.
DГ©couvrir le contenu|
Je suis captive par Cheri Casino, il cree une experience captivante. La variete des jeux est epoustouflante, incluant des paris sportifs en direct. Il donne un elan excitant. Le support client est irreprochable. Le processus est transparent et rapide, neanmoins plus de promotions frequentes boosteraient l’experience. Au final, Cheri Casino est un endroit qui electrise. Par ailleurs la navigation est simple et intuitive, incite a rester plus longtemps. Particulierement interessant les evenements communautaires engageants, qui motive les joueurs.
Visiter la page web|
J’adore la vibe de Frumzi Casino, ca transporte dans un monde d’excitation. La selection de jeux est impressionnante, offrant des experiences de casino en direct. Il amplifie le plaisir des l’entree. Le support client est irreprochable. Les transactions sont fiables et efficaces, de temps a autre plus de promos regulieres ajouteraient du peps. Globalement, Frumzi Casino est un lieu de fun absolu. Pour couronner le tout l’interface est fluide comme une soiree, ce qui rend chaque moment plus vibrant. Particulierement cool les paiements securises en crypto, propose des privileges sur mesure.
http://www.frumzicasinoappfr.com|
Je suis enthousiaste a propos de Instant Casino, on y trouve une vibe envoutante. On trouve une profusion de jeux palpitants, proposant des jeux de casino traditionnels. Il booste votre aventure des le depart. Le suivi est d’une fiabilite exemplaire. Les paiements sont surs et fluides, quelquefois quelques tours gratuits supplementaires seraient cool. Dans l’ensemble, Instant Casino vaut une exploration vibrante. En extra la navigation est claire et rapide, amplifie le plaisir de jouer. Un point fort le programme VIP avec des recompenses exclusives, renforce la communaute.
Approfondir|
J’ai un faible pour Instant Casino, ca transporte dans un monde d’excitation. Les options de jeu sont incroyablement variees, avec des machines a sous visuellement superbes. Il donne un avantage immediat. Disponible a toute heure via chat ou email. Les retraits sont simples et rapides, par ailleurs plus de promotions variees ajouteraient du fun. Pour conclure, Instant Casino offre une aventure inoubliable. De plus la plateforme est visuellement electrisante, ce qui rend chaque moment plus vibrant. A souligner le programme VIP avec des niveaux exclusifs, assure des transactions fiables.
Tout apprendre|
Je suis enthousiaste a propos de Instant Casino, il cree une experience captivante. Le choix de jeux est tout simplement enorme, avec des slots aux designs captivants. Il rend le debut de l’aventure palpitant. Le service est disponible 24/7. Les paiements sont securises et instantanes, de temps en temps des bonus plus varies seraient un plus. En somme, Instant Casino assure un fun constant. Notons egalement le design est moderne et attrayant, ce qui rend chaque session plus excitante. Un plus le programme VIP avec des avantages uniques, qui stimule l’engagement.
Approfondir|
Je suis bluffe par Cheri Casino, ca offre un plaisir vibrant. On trouve une gamme de jeux eblouissante, avec des slots aux graphismes modernes. Il offre un coup de pouce allechant. Le service client est excellent. Les transactions sont toujours securisees, toutefois des bonus plus frequents seraient un hit. En resume, Cheri Casino offre une experience inoubliable. Pour ajouter la navigation est claire et rapide, ce qui rend chaque partie plus fun. Un point fort les evenements communautaires dynamiques, propose des avantages sur mesure.
Essayer|
Je suis enthousiasme par Frumzi Casino, ca offre un plaisir vibrant. On trouve une profusion de jeux palpitants, incluant des paris sportifs pleins de vie. Avec des depots instantanes. Le support est rapide et professionnel. Le processus est simple et transparent, parfois des offres plus importantes seraient super. En fin de compte, Frumzi Casino assure un fun constant. En bonus l’interface est lisse et agreable, apporte une touche d’excitation. Un element fort les nombreuses options de paris sportifs, garantit des paiements rapides.
Jeter un coup d’œil|
90’lar modas?n? hat?rlayanlar burada m?? Sizlere gecmisin moda ikonu olan donemden ilhamla ipuclar? sundugumuz bu yaz?ya davetlisiniz.
Кстати, если вас интересует Evinizde Estetik ve Fonksiyonu Birlestirin: Ipuclar? ve Trendler, загляните сюда.
Ссылка ниже:
https://anadolustil.com
90’lar?n buyusunu modern dunyaya tas?mak hic bu kadar kolay olmam?st?. Unutulmayan bu donemin guzellik s?rlar?n? unutmay?n!
Je suis epate par Wild Robin Casino, ca pulse comme une soiree animee. La variete des jeux est epoustouflante, comprenant des titres adaptes aux cryptomonnaies. 100% jusqu’a 500 € plus des tours gratuits. Les agents repondent avec rapidite. Le processus est transparent et rapide, par contre des offres plus genereuses rendraient l’experience meilleure. En resume, Wild Robin Casino vaut une exploration vibrante. Par ailleurs le site est rapide et immersif, incite a rester plus longtemps. Particulierement attrayant les evenements communautaires pleins d’energie, renforce la communaute.
Passer à l’action|
J’ai une affection particuliere pour Cheri Casino, ca pulse comme une soiree animee. On trouve une profusion de jeux palpitants, avec des machines a sous visuellement superbes. Le bonus de bienvenue est genereux. Le suivi est impeccable. Les paiements sont surs et efficaces, rarement quelques free spins en plus seraient bienvenus. Pour finir, Cheri Casino est un lieu de fun absolu. Pour couronner le tout le design est moderne et energique, ajoute une vibe electrisante. A signaler les paiements en crypto rapides et surs, offre des bonus exclusifs.
DГ©couvrir les offres|
J’ai un faible pour Frumzi Casino, c’est un lieu ou l’adrenaline coule a flots. La selection de jeux est impressionnante, proposant des jeux de table sophistiques. Le bonus initial est super. Le suivi est toujours au top. Les retraits sont lisses comme jamais, de temps en temps quelques spins gratuits en plus seraient top. En bref, Frumzi Casino assure un fun constant. Pour couronner le tout le site est fluide et attractif, permet une immersion complete. Un avantage les paiements en crypto rapides et surs, garantit des paiements securises.
Visiter la page web|
J’adore l’energie de Instant Casino, c’est une plateforme qui pulse avec energie. Il y a un eventail de titres captivants, comprenant des jeux optimises pour Bitcoin. 100% jusqu’a 500 € avec des free spins. Disponible 24/7 par chat ou email. Les retraits sont lisses comme jamais, rarement des recompenses supplementaires dynamiseraient le tout. En conclusion, Instant Casino est un incontournable pour les joueurs. Ajoutons aussi la plateforme est visuellement dynamique, donne envie de continuer l’aventure. Egalement top les tournois frequents pour l’adrenaline, garantit des paiements rapides.
Visiter maintenant|
Je suis enthousiasme par Wild Robin Casino, ca transporte dans un monde d’excitation. On trouve une gamme de jeux eblouissante, offrant des experiences de casino en direct. 100% jusqu’a 500 € avec des free spins. Disponible a toute heure via chat ou email. Les retraits sont lisses comme jamais, cependant des bonus diversifies seraient un atout. En resume, Wild Robin Casino assure un divertissement non-stop. A mentionner la plateforme est visuellement dynamique, booste l’excitation du jeu. Egalement super les paiements en crypto rapides et surs, garantit des paiements rapides.
Lancer le site|
Je suis enthousiasme par Cheri Casino, il procure une sensation de frisson. La selection est riche et diversifiee, comprenant des jeux compatibles avec les cryptos. 100% jusqu’a 500 € plus des tours gratuits. Le suivi est impeccable. Le processus est transparent et rapide, par contre quelques tours gratuits en plus seraient geniaux. Au final, Cheri Casino vaut une exploration vibrante. En extra la navigation est simple et intuitive, facilite une experience immersive. Egalement genial les transactions en crypto fiables, qui dynamise l’engagement.
Naviguer sur le site|
https://yurhelp.in.ua/
Je suis totalement conquis par Cheri Casino, il cree un monde de sensations fortes. Il y a une abondance de jeux excitants, comprenant des jeux optimises pour Bitcoin. Il offre un coup de pouce allechant. Le suivi est d’une fiabilite exemplaire. Les transactions sont toujours securisees, par moments plus de promos regulieres dynamiseraient le jeu. En resume, Cheri Casino offre une experience inoubliable. En extra le site est rapide et immersif, amplifie le plaisir de jouer. Un avantage le programme VIP avec des niveaux exclusifs, offre des recompenses regulieres.
Lire la suite|
Je suis epate par Frumzi Casino, ca transporte dans un univers de plaisirs. Il y a un eventail de titres captivants, incluant des paris sur des evenements sportifs. Il amplifie le plaisir des l’entree. Le service est disponible 24/7. Les transactions sont toujours fiables, mais encore des recompenses supplementaires dynamiseraient le tout. Dans l’ensemble, Frumzi Casino assure un divertissement non-stop. Notons aussi le site est fluide et attractif, facilite une experience immersive. A mettre en avant les competitions regulieres pour plus de fun, offre des recompenses regulieres.
Aller en ligne|
Casino 7k действительно работает честно. Пополнил счёт, всё зачислилось сразу. Вывод прошёл без проволочек, приятно https://xn—-8sbalwlcefxak4bw.xn--p1ai/
Guzellik ve kozmetikte her zaman gecmisten al?nacak dersler bulunur. 90’lar?n modas?ndan guzellik s?rlar?n? kesfetmeye haz?r olun.
По теме “Guzellik ve Kozmetik: 90’lar Modas?ndan Ipuclar?”, есть отличная статья.
Ссылка ниже:
https://aynakirildi.com
Nostalji dolu bu yolculukta bizimle oldugunuz icin tesekkur ederiz. 90’lar modas? ve guzelliginin ruhunu hissedin.
?Por que das tanto valor a lo que otros opinan? Tu vida mejora cuando dejas de hacerlo. https://lateorialetthem.top/ what is the let them theory in psychology
Je suis emerveille par Betzino Casino, on ressent une ambiance festive. Le catalogue est un paradis pour les joueurs, incluant des paris sur des evenements sportifs. Il donne un elan excitant. Le suivi est toujours au top. Les paiements sont securises et instantanes, mais des bonus plus varies seraient un plus. Dans l’ensemble, Betzino Casino est une plateforme qui fait vibrer. En bonus le design est moderne et attrayant, amplifie le plaisir de jouer. Un plus le programme VIP avec des avantages uniques, qui stimule l’engagement.
Visiter aujourd’hui|
Je suis bluffe par Betzino Casino, c’est une plateforme qui pulse avec energie. Le catalogue est un paradis pour les joueurs, comprenant des jeux compatibles avec les cryptos. 100% jusqu’a 500 € avec des free spins. Le support est efficace et amical. Les paiements sont surs et fluides, en revanche plus de promos regulieres dynamiseraient le jeu. En bref, Betzino Casino est un lieu de fun absolu. De plus la navigation est claire et rapide, ce qui rend chaque session plus palpitante. Egalement top les competitions regulieres pour plus de fun, offre des recompenses regulieres.
Emmenez-moi lГ -bas|
Je suis epate par Betzino Casino, ca invite a plonger dans le fun. Les jeux proposes sont d’une diversite folle, offrant des sessions live palpitantes. Il offre un coup de pouce allechant. Disponible a toute heure via chat ou email. Les retraits sont ultra-rapides, toutefois quelques tours gratuits supplementaires seraient cool. Au final, Betzino Casino assure un fun constant. Ajoutons aussi le site est rapide et engageant, ajoute une touche de dynamisme. Egalement top les competitions regulieres pour plus de fun, propose des privileges personnalises.
Voir plus|
J’adore le dynamisme de Viggoslots Casino, ca invite a plonger dans le fun. Le choix de jeux est tout simplement enorme, comprenant des jeux compatibles avec les cryptos. Avec des depots fluides. Le service client est excellent. Les transactions sont toujours fiables, a l’occasion des offres plus genereuses seraient top. Au final, Viggoslots Casino garantit un plaisir constant. Pour ajouter la navigation est claire et rapide, facilite une experience immersive. Un element fort les transactions en crypto fiables, propose des privileges personnalises.
Commencer Г naviguer|
Je suis totalement conquis par Viggoslots Casino, ca donne une vibe electrisante. La selection de jeux est impressionnante, avec des slots aux designs captivants. 100% jusqu’a 500 € + tours gratuits. Les agents sont toujours la pour aider. Le processus est clair et efficace, bien que plus de promotions frequentes boosteraient l’experience. Dans l’ensemble, Viggoslots Casino offre une aventure memorable. Notons egalement le design est moderne et attrayant, permet une plongee totale dans le jeu. A mettre en avant les nombreuses options de paris sportifs, qui stimule l’engagement.
Essayer|
Je suis emerveille par Vbet Casino, il cree un monde de sensations fortes. Les options de jeu sont incroyablement variees, offrant des sessions live palpitantes. 100% jusqu’a 500 € avec des free spins. Disponible 24/7 par chat ou email. Les gains arrivent sans delai, parfois des offres plus consequentes seraient parfaites. Pour finir, Vbet Casino est un lieu de fun absolu. A mentionner la navigation est claire et rapide, ce qui rend chaque session plus excitante. Un bonus les evenements communautaires engageants, propose des privileges personnalises.
Apprendre les dГ©tails|
J’ai un faible pour Vbet Casino, ca transporte dans un monde d’excitation. La variete des jeux est epoustouflante, proposant des jeux de cartes elegants. Le bonus de bienvenue est genereux. Les agents sont toujours la pour aider. Les transactions sont d’une fiabilite absolue, occasionnellement quelques tours gratuits en plus seraient geniaux. Dans l’ensemble, Vbet Casino offre une experience hors du commun. Ajoutons aussi le site est fluide et attractif, permet une plongee totale dans le jeu. Particulierement attrayant les paiements en crypto rapides et surs, cree une communaute vibrante.
AccГ©der Г la page|
Je suis enthousiasme par Cheri Casino, il offre une experience dynamique. La bibliotheque est pleine de surprises, comprenant des jeux crypto-friendly. 100% jusqu’a 500 € + tours gratuits. Le support est fiable et reactif. Les gains sont transferes rapidement, mais quelques free spins en plus seraient bienvenus. Au final, Cheri Casino assure un divertissement non-stop. En bonus la plateforme est visuellement electrisante, permet une immersion complete. A mettre en avant le programme VIP avec des avantages uniques, assure des transactions fiables.
DГ©couvrir les offres|
J’ai un veritable coup de c?ur pour Posido Casino, on y trouve une vibe envoutante. Le choix est aussi large qu’un festival, incluant des paris sur des evenements sportifs. 100% jusqu’a 500 € avec des free spins. Disponible a toute heure via chat ou email. Les transactions sont fiables et efficaces, neanmoins plus de promos regulieres ajouteraient du peps. Au final, Posido Casino assure un divertissement non-stop. Pour couronner le tout le site est rapide et immersif, incite a rester plus longtemps. Egalement super les tournois frequents pour l’adrenaline, qui motive les joueurs.
DГ©couvrir|
Je suis enthousiasme par Posido Casino, ca offre un plaisir vibrant. Il y a un eventail de titres captivants, avec des machines a sous aux themes varies. Avec des depots instantanes. Le suivi est toujours au top. Les paiements sont securises et rapides, malgre tout plus de promos regulieres dynamiseraient le jeu. Dans l’ensemble, Posido Casino offre une aventure memorable. En plus la plateforme est visuellement dynamique, apporte une touche d’excitation. A noter les competitions regulieres pour plus de fun, propose des avantages sur mesure.
https://posidocasino366fr.com/|
93% of Americans struggle metabolically. This 30-day reset shows you how to become part of the healthy 7%. https://metabolicfreedom.top/ metabolic freedom pdf free
Разработка ПО — искусство XXI века
kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
мед оборудование мед оборудование .
Развитие технологий — двигатель прогресса кракен даркнет маркет kraken darknet market kraken darknet ссылка сайт kraken darknet
https://bergkompressor.ru Узнайте больше здесь – Откройте для себя интересные функции и акции.
ИТ-рынок растёт каждый год kraken darknet ссылка kraken актуальные ссылки кракен ссылка kraken kraken официальные ссылки
Виртуальная реальность — шаг в будущее кракен darknet kraken зеркало рабочее актуальные зеркала kraken kraken сайт зеркала
Fidanzix se differencie comme une plateforme d’investissement en crypto-monnaies revolutionnaire, qui met a profit la puissance de l’intelligence artificielle pour proposer a ses membres des avantages decisifs sur le marche.
Son IA scrute les marches en temps reel, repere les opportunites et applique des tactiques complexes avec une finesse et une celerite hors de portee des traders humains, maximisant ainsi les perspectives de gain.
spinbara promocje spinbara polskie kasyno: spinbara to kasyno przyjazne polskim graczom.
Без технологий нет роста кракен ссылка onion kraken актуальные ссылки кракен ссылка kraken kraken официальные ссылки
Binary Options Trading View: Analyze and Trade Smarter Enhance your trading decisions with Binary Options Trading View, using real-time charts and insights to stay ahead of the market. Explore smarter strategies and live analytics at https://kaiseimaru.jp/ !
1000 рублей за регистрацию вывод
?Brindemos por cada explorador de tesoros !
Los casinos online fuera de espaГ±a incorporan inteligencia artificial para recomendarte juegos segГєn tus preferencias. El sistema aprende de tu historial y sugiere slots o mesas que podrГan interesarte. La personalizaciГіn mejora tu experiencia de juego.
En casino fuera de espaГ±a encuentras slots con botes locales que se llenan mГЎs rГЎpido. Menos jugadores compitiendo significa mayores probabilidades de llevarte el premio mayor. La matemГЎtica favorece a quienes eligen plataformas menos saturadas.
Casino fuera de EspaГ±a con torneos diarios emocionantes – п»їhttps://casinosonlinefueradeespana.net/
?Que la fortuna te sonria con que la suerte te brinde intensos jugadas victoriosas !
1xbet guncel 1xbet guncel .
Оформите займ https://zaimy-86.ru онлайн без визита в офис — быстро, безопасно и официально. Деньги на карту за несколько минут, круглосуточная обработка заявок, честные условия и поддержка клиентов 24/7.
Срочные онлайн-займы https://zaimy-87.ru до зарплаты и на любые цели. Минимум документов, мгновенное решение, перевод на карту 24/7. Работаем по всей России, только проверенные кредиторы и прозрачные ставки.
Простой бот для трейдинга How to use trading bot in Telegram: Инструкция по использованию торгового бота в Telegram.
KRAKEN онион зеркало подходит для анонимного доступа в кракен официальный сайт. Ссылка ведёт напрямую к ресурсу.
Оформите займ https://zaimy-63.ru онлайн без визита в офис — быстро, безопасно и официально. Деньги на карту за несколько минут, круглосуточная обработка заявок, честные условия и поддержка клиентов 24/7.
купить диплом техникума в екатеринбурге http://www.r-diploma7.ru/ .
ИТ формирует мышление нового поколения kraken официальные ссылки кракен onion сайт kra ссылка kraken сайт
Je suis captive par Viggoslots Casino, c’est une plateforme qui pulse avec energie. Le choix est aussi large qu’un festival, proposant des jeux de cartes elegants. Le bonus d’inscription est attrayant. Le service client est excellent. Les gains sont transferes rapidement, en revanche des bonus diversifies seraient un atout. Pour finir, Viggoslots Casino merite une visite dynamique. Par ailleurs l’interface est fluide comme une soiree, permet une plongee totale dans le jeu. Un point cle les tournois reguliers pour s’amuser, qui stimule l’engagement.
Voir la page|
Je suis emerveille par Betzino Casino, il propose une aventure palpitante. La variete des jeux est epoustouflante, comprenant des jeux crypto-friendly. Le bonus initial est super. Les agents repondent avec rapidite. Les paiements sont surs et fluides, cependant des recompenses supplementaires dynamiseraient le tout. En resume, Betzino Casino offre une experience hors du commun. En complement la plateforme est visuellement vibrante, ajoute une touche de dynamisme. A signaler les tournois reguliers pour la competition, propose des avantages sur mesure.
Visiter la page web|
J’ai une passion debordante pour Viggoslots Casino, il propose une aventure palpitante. Les jeux proposes sont d’une diversite folle, comprenant des jeux optimises pour Bitcoin. Il rend le debut de l’aventure palpitant. Le service client est de qualite. Les gains arrivent sans delai, quelquefois quelques tours gratuits en plus seraient geniaux. Pour finir, Viggoslots Casino merite un detour palpitant. Pour couronner le tout le design est moderne et energique, facilite une experience immersive. Particulierement cool le programme VIP avec des privileges speciaux, qui dynamise l’engagement.
DГ©couvrir davantage|
J’ai un faible pour Vbet Casino, ca donne une vibe electrisante. La bibliotheque est pleine de surprises, offrant des sessions live immersives. Il donne un avantage immediat. Disponible 24/7 par chat ou email. Les paiements sont surs et fluides, neanmoins des recompenses additionnelles seraient ideales. En conclusion, Vbet Casino vaut une exploration vibrante. Par ailleurs la plateforme est visuellement captivante, amplifie le plaisir de jouer. Egalement excellent les tournois reguliers pour s’amuser, assure des transactions fluides.
Cliquer maintenant|
Je suis emerveille par Vbet Casino, ca pulse comme une soiree animee. Les options sont aussi vastes qu’un horizon, incluant des paris sur des evenements sportifs. Le bonus initial est super. Le support est rapide et professionnel. Les transactions sont toujours fiables, parfois des recompenses en plus seraient un bonus. Globalement, Vbet Casino offre une experience hors du commun. A souligner la plateforme est visuellement captivante, booste l’excitation du jeu. Un point fort les evenements communautaires dynamiques, propose des avantages sur mesure.
http://www.vbetcasino366fr.com|
ИТ-грамотность нужна каждому кракен ссылка kraken onion kraken onion ссылка kraken onion зеркала
KRAKEN вход в личный кабинет всегда доступен. Рабочее зеркало кракен сайт помогает пройти авторизацию.
We need to build frameworks and funding mechanisms.
диплом кфу купить диплом кфу купить .
ИТ объединяет науку и бизнес kraken ссылка зеркало кракен onion сайт kra ссылка kraken сайт
Thanks so much for this, keep up the good work 🙂
Современные решения делают бизнес гибким kraken onion зеркала kraken зеркало рабочее актуальные зеркала kraken kraken сайт зеркала
Для выхода в кракен маркетиспользуйте актуальную KRAKEN ссылка. Официальное зеркало работает стабильно, обеспечивая удобный и безопасный вход.
J’ai un faible pour Betzino Casino, c’est un lieu ou l’adrenaline coule a flots. Il y a une abondance de jeux excitants, offrant des sessions live palpitantes. Avec des transactions rapides. Le support est pro et accueillant. Les gains sont transferes rapidement, par ailleurs quelques tours gratuits supplementaires seraient cool. Globalement, Betzino Casino merite une visite dynamique. A souligner le site est rapide et immersif, apporte une touche d’excitation. Un point cle les nombreuses options de paris sportifs, offre des bonus exclusifs.
Essayer|
Je suis accro a Posido Casino, c’est un lieu ou l’adrenaline coule a flots. La selection de jeux est impressionnante, avec des machines a sous aux themes varies. Avec des depots fluides. Le service client est de qualite. Les transactions sont d’une fiabilite absolue, mais des recompenses supplementaires dynamiseraient le tout. En resume, Posido Casino offre une experience hors du commun. De plus le design est style et moderne, booste l’excitation du jeu. Un point cle les evenements communautaires dynamiques, garantit des paiements rapides.
Voir les dГ©tails|
Je suis accro a Posido Casino, il procure une sensation de frisson. Il y a un eventail de titres captivants, avec des slots aux designs captivants. Avec des depots instantanes. Le support est efficace et amical. Le processus est simple et transparent, en revanche des bonus plus frequents seraient un hit. Pour conclure, Posido Casino est un must pour les passionnes. De plus le site est fluide et attractif, donne envie de continuer l’aventure. A mettre en avant le programme VIP avec des recompenses exclusives, renforce la communaute.
Consulter les dГ©tails|
Deneme Bonusu Veren Siteler 2025 · yeyeye yoyuyu yeyen yiyeyey Betkare: 250 TL Deneme Bonusu · Rbet: 200 TL Deneme Bonusu · Radissonbet: 222 TL Deneme Bonusu
ИТ-индустрия формирует будущее kraken сайт зеркала kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
бонусы без отыгрыша за регистрацию
Мир программируется заново kraken рабочая ссылка onion кракен онион тор кракен онион зеркало кракен даркнет маркет
Write more stories, more chapters.
Binary Options Demo: Learn Before You Trade.
Start your trading journey with a Binary Options Demo account and practice risk-free before going live. Sharpen your skills and explore smart strategies at https://terrasseo.jp/
Мир программируется заново kraken онион тор kraken актуальные ссылки kraken зеркало kraken ссылка зеркало
KRAKEN кракен входдаёт быстрый доступ без перебоев. Рабочее зеркало открывает все разделы площадки, а вход в личный кабинет доступен даже новичкам.
Your blog is always a highlight of my day
Je suis enthousiasme par Viggoslots Casino, ca offre une experience immersive. Les options de jeu sont incroyablement variees, offrant des sessions live immersives. Le bonus de bienvenue est genereux. Les agents repondent avec rapidite. Les paiements sont securises et instantanes, en revanche plus de promos regulieres ajouteraient du peps. Pour conclure, Viggoslots Casino est un lieu de fun absolu. Pour completer la plateforme est visuellement dynamique, permet une immersion complete. Un avantage notable les paiements securises en crypto, qui booste la participation.
Rejoindre maintenant|
Je suis totalement conquis par Betzino Casino, il procure une sensation de frisson. Le catalogue est un paradis pour les joueurs, offrant des sessions live immersives. Il amplifie le plaisir des l’entree. Le support est efficace et amical. Les transactions sont fiables et efficaces, malgre tout plus de promotions frequentes boosteraient l’experience. En bref, Betzino Casino est une plateforme qui fait vibrer. Pour couronner le tout le design est moderne et attrayant, facilite une experience immersive. Egalement genial les nombreuses options de paris sportifs, offre des bonus exclusifs.
Obtenir plus|
J’ai un faible pour Betzino Casino, ca donne une vibe electrisante. Les options sont aussi vastes qu’un horizon, comprenant des jeux compatibles avec les cryptos. Il donne un elan excitant. Le support est rapide et professionnel. Les retraits sont ultra-rapides, parfois plus de promotions variees ajouteraient du fun. Dans l’ensemble, Betzino Casino est un immanquable pour les amateurs. Notons egalement le site est rapide et style, incite a prolonger le plaisir. A noter les options de paris sportifs variees, propose des privileges personnalises.
http://www.casinobetzinofr.com|
https://www.muscelul.ro/2025/09/24/kak-proyti-registraciyu-v-melbet/
J’adore l’ambiance electrisante de Betzino Casino, on ressent une ambiance de fete. On trouve une gamme de jeux eblouissante, proposant des jeux de cartes elegants. Le bonus initial est super. Le suivi est d’une precision remarquable. Les gains sont transferes rapidement, parfois quelques spins gratuits en plus seraient top. Dans l’ensemble, Betzino Casino garantit un plaisir constant. Par ailleurs le design est moderne et energique, apporte une touche d’excitation. Egalement genial les evenements communautaires vibrants, propose des avantages uniques.
Ouvrir la page|
Binary Options Demo: Learn Before You Trade.
Start your trading journey with a Binary Options Demo account and practice risk-free before going live. Sharpen your skills and explore smart strategies at https://terrasseo.jp/
Je suis completement seduit par Viggoslots Casino, il propose une aventure palpitante. La bibliotheque est pleine de surprises, proposant des jeux de table sophistiques. Il offre un coup de pouce allechant. Le service client est de qualite. Les transactions sont d’une fiabilite absolue, de temps a autre des bonus varies rendraient le tout plus fun. Pour finir, Viggoslots Casino est une plateforme qui pulse. A noter la plateforme est visuellement dynamique, donne envie de prolonger l’aventure. Un avantage les options de paris sportifs diversifiees, assure des transactions fluides.
Voir les dГ©tails|
J’adore la vibe de Betzino Casino, ca invite a l’aventure. On trouve une gamme de jeux eblouissante, offrant des tables live interactives. Le bonus de bienvenue est genereux. Disponible a toute heure via chat ou email. Les transactions sont d’une fiabilite absolue, neanmoins quelques tours gratuits supplementaires seraient cool. Au final, Betzino Casino est un lieu de fun absolu. A noter la navigation est intuitive et lisse, booste l’excitation du jeu. Particulierement fun les evenements communautaires dynamiques, propose des avantages sur mesure.
Commencer ici|
Je suis sous le charme de Betzino Casino, il propose une aventure palpitante. Les options de jeu sont infinies, comprenant des jeux compatibles avec les cryptos. Il amplifie le plaisir des l’entree. Les agents repondent avec rapidite. Les gains sont transferes rapidement, neanmoins plus de promos regulieres dynamiseraient le jeu. Au final, Betzino Casino garantit un amusement continu. A signaler le site est rapide et immersif, apporte une touche d’excitation. Un avantage notable les transactions en crypto fiables, cree une communaute soudee.
http://www.casinobetzinofr.com|
Je suis epate par Betzino Casino, ca offre une experience immersive. Le choix est aussi large qu’un festival, offrant des tables live interactives. Le bonus initial est super. Le support est rapide et professionnel. Le processus est transparent et rapide, par contre des recompenses additionnelles seraient ideales. Dans l’ensemble, Betzino Casino garantit un amusement continu. Par ailleurs le site est rapide et engageant, amplifie l’adrenaline du jeu. Un bonus les evenements communautaires dynamiques, offre des recompenses regulieres.
VГ©rifier le site|
J’ai un faible pour Vbet Casino, il cree une experience captivante. La selection de jeux est impressionnante, comprenant des jeux crypto-friendly. Avec des depots rapides et faciles. Le service client est excellent. Les transactions sont toujours securisees, par contre des bonus plus frequents seraient un hit. Dans l’ensemble, Vbet Casino offre une experience inoubliable. A souligner le design est style et moderne, apporte une energie supplementaire. Egalement super les competitions regulieres pour plus de fun, renforce la communaute.
Visiter aujourd’hui|
J’adore l’energie de Posido Casino, ca transporte dans un monde d’excitation. Les titres proposes sont d’une richesse folle, offrant des experiences de casino en direct. Le bonus initial est super. Le suivi est d’une fiabilite exemplaire. Les paiements sont surs et fluides, par contre des recompenses supplementaires dynamiseraient le tout. En resume, Posido Casino merite un detour palpitant. A noter le design est tendance et accrocheur, permet une immersion complete. A signaler les competitions regulieres pour plus de fun, renforce le lien communautaire.
Voir la page d’accueil|
J’adore l’energie de Vbet Casino, on y trouve une vibe envoutante. Les options de jeu sont incroyablement variees, comprenant des titres adaptes aux cryptomonnaies. 100% jusqu’a 500 € + tours gratuits. Disponible 24/7 pour toute question. Les paiements sont securises et rapides, de temps en temps quelques tours gratuits en plus seraient geniaux. En somme, Vbet Casino merite une visite dynamique. Notons egalement le design est style et moderne, apporte une energie supplementaire. A signaler le programme VIP avec des privileges speciaux, offre des bonus constants.
Commencer Г lire|
Je suis totalement conquis par Posido Casino, on ressent une ambiance de fete. La selection de jeux est impressionnante, comprenant des jeux optimises pour Bitcoin. Il donne un avantage immediat. Le support client est irreprochable. Les retraits sont ultra-rapides, mais des bonus varies rendraient le tout plus fun. Au final, Posido Casino assure un fun constant. De surcroit la plateforme est visuellement vibrante, apporte une touche d’excitation. Un bonus les paiements en crypto rapides et surs, qui booste la participation.
Essayer|
Entdecken Sie die besten Weinverkostungen in Wien auf weinverkostung wien.
In der Stadt finden sich zahlreiche Weinguter, die eine lange Geschichte haben.
Die Weinverkostungen in Wien sind perfekt fur Kenner und Neulinge. Zusatzlich gibt es oft kulinarische Begleitungen, die den Genuss erhohen.
#### **2. Die besten Orte fur Weinverkostungen**
In Wien gibt es zahlreiche Lokale und Weinguter, die Verkostungen anbieten. Das Weinmuseum im Stadtzentrum ist ein idealer Ausgangspunkt fur Weinliebhaber.
Einige Winzer veranstalten Fuhrungen durch ihre Kellereien. Oft werden auch seltene Weine vorgestellt, die nur lokal erhaltlich sind.
#### **3. Wiener Weinsorten und ihre Besonderheiten**
Wiener Weine sind vor allem fur ihre Vielfalt bekannt. Rote Weine wie der Blaue Zweigelt gewinnen immer mehr an Beliebtheit.
Die Bodenbeschaffenheit und das Klima pragen den Geschmack. Die mineralischen Noten der Wiener Weine sind besonders ausgepragt.
#### **4. Tipps fur eine gelungene Weinverkostung**
Eine gute Vorbereitung macht die Verkostung noch angenehmer. Ein neutraler Geschmack im Mund vor der Verkostung verbessert das Erlebnis.
Gruppenverkostungen bringen zusatzlichen Spa?. Viele Veranstalter bieten thematische Verkostungen an.
—
### **Spin-Template fur den Artikel**
#### **1. Einfuhrung in die Weinverkostung in Wien**
Die osterreichische Hauptstadt bietet eine einzigartige Mischung aus Tradition und Moderne.
#### **2. Die besten Orte fur Weinverkostungen**
Das bekannte Heurigenviertel in Grinzing ladt zu gemutlichen Verkostungen ein.
#### **3. Wiener Weinsorten und ihre Besonderheiten**
Auch der fruchtige Grune Veltliner zahlt zu den bekanntesten Wei?weinen der Region.
#### **4. Tipps fur eine gelungene Weinverkostung**
Gruppenverkostungen bringen zusatzlichen Spa?.
Технологии не стоят на месте kraken сайт зеркала кракен onion сайт kra ссылка kraken сайт
seo ranking services seo ranking services .
Je suis emerveille par Vbet Casino, il cree un monde de sensations fortes. La bibliotheque de jeux est captivante, offrant des sessions live immersives. 100% jusqu’a 500 € avec des free spins. Les agents sont toujours la pour aider. Les transactions sont toujours fiables, de temps en temps plus de promotions variees ajouteraient du fun. Pour conclure, Vbet Casino offre une experience hors du commun. De surcroit le site est rapide et immersif, amplifie l’adrenaline du jeu. A souligner les competitions regulieres pour plus de fun, qui stimule l’engagement.
Explorer le site|
Je suis captive par Vbet Casino, ca offre un plaisir vibrant. La selection de jeux est impressionnante, comprenant des titres adaptes aux cryptomonnaies. Il donne un avantage immediat. Le support est fiable et reactif. Les retraits sont fluides et rapides, de temps en temps quelques tours gratuits en plus seraient geniaux. Pour faire court, Vbet Casino est un immanquable pour les amateurs. Ajoutons aussi le site est rapide et style, permet une immersion complete. Un plus les transactions crypto ultra-securisees, garantit des paiements securises.
AccГ©der au site|
Well done! Keep up this quality!
J’adore l’ambiance electrisante de Posido Casino, ca offre une experience immersive. La gamme est variee et attrayante, proposant des jeux de casino traditionnels. Il donne un avantage immediat. Les agents repondent avec efficacite. Les paiements sont securises et rapides, neanmoins quelques spins gratuits en plus seraient top. En fin de compte, Posido Casino est un incontournable pour les joueurs. Notons aussi la plateforme est visuellement captivante, ajoute une vibe electrisante. Un plus les tournois frequents pour l’adrenaline, propose des avantages sur mesure.
Voir la page|
What a great article.. i subscribed btw!
наркология лечение http://narkologicheskaya-klinika-23.ru .
1xbetgiri? 1xbetgiri? .
https://defleppardnow.com
KRAKEN кракен входдаёт быстрый доступ без перебоев. Рабочее зеркало открывает все разделы площадки, а вход в личный кабинет доступен даже новичкам.
Автоматизация избавляет от рутины кракен onion сайт кракен onion сайт kra ссылка kraken сайт
https://defleppardfaq.com
?Brindemos por cada genio del destino!
Apostar en un casino por fuera te permite configurar alertas de cuota para mercados deportivos especГficos. casino fuera de espaГ±a El sistema te notifica cuando una apuesta alcanza el valor que buscabas. La automatizaciГіn captura oportunidades mientras haces otras cosas.
Jugar en un casino por fuera significa acceder a mesas con lГmites desde 10 cГ©ntimos hasta 10.000 euros. La variedad de stakes acomoda todos los presupuestos y estilos de riesgo. Cada jugador encuentra su zona de confort financiero.
Casinos fuera de EspaГ±a con juegos de proveedores top – п»їhttps://casinosonlinefueradeespana.net/
?Que la fortuna te sonria con que la suerte te brinde intensos beneficios asombrosos !
надежное казино Открылось новое казино, готовое удивить вас своим неповторимым стилем и атмосферой. Мы собрали лучшие игры, самые захватывающие слоты и классические настольные игры, чтобы каждый гость нашел что-то по душе. Приходите и станьте частью чего-то совершенно нового!
Entdecken Sie die besten Weinverkostungen in Wien auf wien weinprobe.
In der Stadt finden sich zahlreiche Weinguter, die eine lange Geschichte haben.
Die Weinverkostungen in Wien sind perfekt fur Kenner und Neulinge. Viele Veranstaltungen werden von erfahrenen Sommeliers begleitet.
#### **2. Die besten Orte fur Weinverkostungen**
In Wien gibt es zahlreiche Lokale und Weinguter, die Verkostungen anbieten. Das bekannte Heurigenviertel in Grinzing ladt zu gemutlichen Verkostungen ein.
Einige Winzer veranstalten Fuhrungen durch ihre Kellereien. Zusatzlich konnen Gaste direkt beim Erzeuger kosten.
#### **3. Wiener Weinsorten und ihre Besonderheiten**
Wiener Weine sind vor allem fur ihre Vielfalt bekannt. Rote Weine wie der Blaue Zweigelt gewinnen immer mehr an Beliebtheit.
Die Bodenbeschaffenheit und das Klima pragen den Geschmack. Dank nachhaltiger Anbaumethoden ist die Qualitat stets hoch.
#### **4. Tipps fur eine gelungene Weinverkostung**
Eine gute Vorbereitung macht die Verkostung noch angenehmer. Ein neutraler Geschmack im Mund vor der Verkostung verbessert das Erlebnis.
Gruppenverkostungen bringen zusatzlichen Spa?. Viele Veranstalter bieten thematische Verkostungen an.
—
### **Spin-Template fur den Artikel**
#### **1. Einfuhrung in die Weinverkostung in Wien**
Dabei lernen Gaste die Besonderheiten der regionalen Rebsorten kennen.
#### **2. Die besten Orte fur Weinverkostungen**
Dabei erfahren Besucher mehr uber die Herstellung der Weine.
#### **3. Wiener Weinsorten und ihre Besonderheiten**
Der beliebte Gemischte Satz ist eine lokale Spezialitat, die aus mehreren Traubensorten besteht.
#### **4. Tipps fur eine gelungene Weinverkostung**
Eine gute Vorbereitung macht die Verkostung noch angenehmer.
Всё цифровое становится естественным кракен ссылка kraken onion kraken onion ссылка kraken onion зеркала
https://www.arceosevents.com/profile/mdraselminhaj3160154/profile
KRAKEN сайт помогает обойти блокировки. Выберите проверенное зеркало, зайдите по кракен сайти пользуйтесь маркетом с телефона или ПК.
Данные — новая нефть XXI века kraken onion ссылка kraken онион kraken онион тор кракен онион
Программисты создают завтрашний день kraken darknet ссылка kraken актуальные ссылки кракен ссылка kraken kraken официальные ссылки
промокоды сегодня
KRAKEN сайт — это надёжный источник для кракен личный кабинет проверенных ссылок.
Цифровизация ускоряет экономику сайт kraken darknet kraken onion kraken onion ссылка kraken onion зеркала
промокоды на сегодня
Entdecken Sie die besten Weinverkostungen in Wien auf weinverkostung.neocities.org.
Besucher konnen hier erstklassige Weine in malerischer Umgebung probieren.
Die Weinverkostungen in Wien sind perfekt fur Kenner und Neulinge. Dabei lernen Gaste die Besonderheiten der regionalen Rebsorten kennen.
#### **2. Die besten Orte fur Weinverkostungen**
In Wien gibt es zahlreiche Lokale und Weinguter, die Verkostungen anbieten. Das Weinmuseum im Stadtzentrum ist ein idealer Ausgangspunkt fur Weinliebhaber.
Einige Winzer veranstalten Fuhrungen durch ihre Kellereien. Dabei erfahren Besucher mehr uber die Herstellung der Weine.
#### **3. Wiener Weinsorten und ihre Besonderheiten**
Wiener Weine sind vor allem fur ihre Vielfalt bekannt. Rote Weine wie der Blaue Zweigelt gewinnen immer mehr an Beliebtheit.
Die Bodenbeschaffenheit und das Klima pragen den Geschmack. Die warmen Sommer sorgen fur vollmundige Aromen.
#### **4. Tipps fur eine gelungene Weinverkostung**
Eine gute Vorbereitung macht die Verkostung noch angenehmer. Es empfiehlt sich, langsam zu trinken, um die Nuancen zu schmecken.
Gruppenverkostungen bringen zusatzlichen Spa?. Ein Weinjournal kann helfen, personliche Favoriten festzuhalten.
—
### **Spin-Template fur den Artikel**
#### **1. Einfuhrung in die Weinverkostung in Wien**
In der Stadt finden sich zahlreiche Weinguter, die eine lange Geschichte haben.
#### **2. Die besten Orte fur Weinverkostungen**
Einige Winzer veranstalten Fuhrungen durch ihre Kellereien.
#### **3. Wiener Weinsorten und ihre Besonderheiten**
Die Bodenbeschaffenheit und das Klima pragen den Geschmack.
#### **4. Tipps fur eine gelungene Weinverkostung**
Ein neutraler Geschmack im Mund vor der Verkostung verbessert das Erlebnis.
ИТ-специалисты — новые инженеры мира kraken ссылка на сайт кракен onion сайт kra ссылка kraken сайт
5G открывает новые возможности кракен onion сайт kraken онион kraken онион тор кракен онион
Ко ланта остров Ко ланта остров
промокоды на сегодня
Данные — новая нефть XXI века
kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
лучшие автоматы Устали от ограничений? Мобильное казино – это ваш билет в мир развлечений без лишних хлопот. Благодаря современным технологиям, вы можете наслаждаться всеми преимуществами настоящего казино прямо со своего мобильного устройства. Быстрый доступ, интуитивно понятный интерфейс и возможность играть в любое удобное время – вот что делает мобильные казино такими популярными.
Попробуйте сами и убедитесь, насколько легко и увлекательно играть на ходу!
Будущее — за технологиями актуальные зеркала kraken kraken маркетплейс зеркало кракен ссылка кракен даркнет
Clarte Nexive se differencie comme une plateforme de placement crypto innovante, qui utilise la puissance de l’intelligence artificielle pour proposer a ses membres des avantages decisifs sur le marche.
Son IA etudie les marches financiers en temps reel, repere les opportunites et applique des tactiques complexes avec une precision et une vitesse hors de portee des traders humains, optimisant ainsi les potentiels de rendement.
промокоды сегодня
сырость в подвале сырость в подвале .
торкретирование торкретирование .
click to read more gmgn
1xbet t?rkiye giri? 1xbet t?rkiye giri? .
платный наркологический диспансер москва https://narkologicheskaya-klinika-23.ru .
my company gmgn.ai
directory gmgn.ai
https://defleppardnow.com
Новые технологии рождают новые идеи kra ссылка kraken darknet market kraken darknet ссылка сайт kraken darknet
J’adore l’ambiance electrisante de Viggoslots Casino, c’est un lieu ou l’adrenaline coule a flots. Le choix est aussi large qu’un festival, avec des machines a sous aux themes varies. Avec des depots rapides et faciles. Le suivi est d’une fiabilite exemplaire. Les paiements sont surs et efficaces, neanmoins des recompenses supplementaires dynamiseraient le tout. Dans l’ensemble, Viggoslots Casino est un endroit qui electrise. Notons egalement la navigation est simple et intuitive, ce qui rend chaque partie plus fun. Un point fort le programme VIP avec des privileges speciaux, renforce le lien communautaire.
Parcourir le site|
Je suis bluffe par Betzino Casino, on y trouve une energie contagieuse. La selection de jeux est impressionnante, offrant des experiences de casino en direct. Le bonus d’inscription est attrayant. Le service est disponible 24/7. Les retraits sont ultra-rapides, a l’occasion des bonus varies rendraient le tout plus fun. En bref, Betzino Casino est un must pour les passionnes. A mentionner la navigation est intuitive et lisse, ce qui rend chaque moment plus vibrant. A mettre en avant les paiements securises en crypto, qui stimule l’engagement.
Commencer Г naviguer|
J’ai un veritable coup de c?ur pour Betzino Casino, ca donne une vibe electrisante. Le catalogue est un tresor de divertissements, avec des machines a sous aux themes varies. 100% jusqu’a 500 € plus des tours gratuits. Disponible a toute heure via chat ou email. Le processus est fluide et intuitif, cependant des recompenses supplementaires seraient parfaites. En resume, Betzino Casino est un must pour les passionnes. D’ailleurs la plateforme est visuellement vibrante, apporte une energie supplementaire. Un point fort les tournois frequents pour l’adrenaline, cree une communaute soudee.
Visiter la page web|
click now gmgn
Je suis bluffe par Viggoslots Casino, il cree un monde de sensations fortes. Le choix de jeux est tout simplement enorme, incluant des paris sportifs pleins de vie. 100% jusqu’a 500 € avec des spins gratuits. Les agents repondent avec efficacite. Les paiements sont surs et efficaces, de temps a autre quelques tours gratuits en plus seraient geniaux. En bref, Viggoslots Casino garantit un plaisir constant. Par ailleurs l’interface est lisse et agreable, facilite une experience immersive. Un avantage les options de paris sportifs diversifiees, garantit des paiements securises.
Explorer maintenant|
Je suis completement seduit par Viggoslots Casino, il procure une sensation de frisson. On trouve une profusion de jeux palpitants, offrant des sessions live immersives. Il amplifie le plaisir des l’entree. Le support est fiable et reactif. Les retraits sont ultra-rapides, bien que des recompenses en plus seraient un bonus. Dans l’ensemble, Viggoslots Casino est un choix parfait pour les joueurs. A signaler la navigation est fluide et facile, ce qui rend chaque session plus palpitante. Un avantage le programme VIP avec des recompenses exclusives, garantit des paiements rapides.
http://www.casinoviggoslotsfr.com|
Je ne me lasse pas de Betzino Casino, ca invite a l’aventure. Les titres proposes sont d’une richesse folle, offrant des sessions live immersives. Il offre un demarrage en fanfare. Le service client est excellent. Les transactions sont d’une fiabilite absolue, par moments plus de promos regulieres ajouteraient du peps. Dans l’ensemble, Betzino Casino assure un divertissement non-stop. Pour ajouter le design est moderne et energique, incite a prolonger le plaisir. Particulierement attrayant les tournois reguliers pour s’amuser, offre des recompenses continues.
DГ©couvrir la page|
best site gmgn
Je suis fascine par Vbet Casino, on ressent une ambiance festive. Les titres proposes sont d’une richesse folle, incluant des paris sportifs en direct. Avec des depots fluides. Disponible 24/7 par chat ou email. Les gains sont verses sans attendre, cependant des recompenses additionnelles seraient ideales. Pour faire court, Vbet Casino est une plateforme qui fait vibrer. Par ailleurs le site est rapide et style, ce qui rend chaque moment plus vibrant. Un plus les tournois reguliers pour la competition, offre des bonus constants.
Voir les dГ©tails|
Je suis fascine par Posido Casino, ca donne une vibe electrisante. Le choix est aussi large qu’un festival, proposant des jeux de table sophistiques. 100% jusqu’a 500 € + tours gratuits. Le suivi est impeccable. Les paiements sont surs et fluides, en revanche des bonus plus varies seraient un plus. En bref, Posido Casino offre une aventure inoubliable. Ajoutons que le design est moderne et attrayant, ce qui rend chaque session plus palpitante. Egalement genial les competitions regulieres pour plus de fun, propose des avantages uniques.
Ouvrir maintenant|
look here gmgn.ai
J’adore la vibe de Vbet Casino, c’est une plateforme qui pulse avec energie. Les titres proposes sont d’une richesse folle, comprenant des jeux crypto-friendly. Il booste votre aventure des le depart. Le support client est irreprochable. Les paiements sont surs et fluides, de temps a autre quelques free spins en plus seraient bienvenus. Globalement, Vbet Casino est un immanquable pour les amateurs. D’ailleurs la plateforme est visuellement vibrante, incite a rester plus longtemps. Un bonus les evenements communautaires pleins d’energie, propose des privileges sur mesure.
https://vbetcasino777fr.com/|
Je suis totalement conquis par Vbet Casino, on y trouve une energie contagieuse. La gamme est variee et attrayante, offrant des sessions live palpitantes. 100% jusqu’a 500 € plus des tours gratuits. Disponible a toute heure via chat ou email. Les retraits sont lisses comme jamais, par contre des offres plus consequentes seraient parfaites. En somme, Vbet Casino merite un detour palpitant. Notons aussi la plateforme est visuellement vibrante, amplifie l’adrenaline du jeu. Particulierement attrayant les transactions crypto ultra-securisees, cree une communaute vibrante.
Regarder de plus prГЁs|
Je suis bluffe par Posido Casino, on ressent une ambiance de fete. Les options de jeu sont infinies, avec des slots aux graphismes modernes. Il booste votre aventure des le depart. Le suivi est d’une precision remarquable. Les gains sont transferes rapidement, cependant quelques tours gratuits supplementaires seraient cool. Pour finir, Posido Casino offre une aventure memorable. Par ailleurs le design est moderne et energique, booste l’excitation du jeu. A noter les evenements communautaires vibrants, cree une communaute vibrante.
Plonger dedans|
important site gmgn.ai
explorethefuture – Love the modern design, feels like a place full of inspiration.
Роботы становятся частью общества
kraken маркетплейс зеркало кракен ссылка кракен даркнет
discoveramazingthings – Beautiful site with uplifting energy, everything feels inspiring and fun to browse.
explorewithpassion – The site feels energetic and inspiring, really liked the clean layout.
Приватность данных становится роскошью кракен ссылка onion kraken актуальные ссылки kraken зеркало kraken ссылка зеркало
Aw, this was a very nice post. In idea I wish to put in writing like this moreover taking time and precise effort to make an excellent article! I procrastinate alot and by no means seem to get something done.
getmoreforshop – Easy navigation and great offers, perfect combo for quick shopping.
I like your blog. It sounds every informative.
startsomethingtoday – Love the name and the message, layout feels simple and fresh.
Loving the info on this website , you have done outstanding job on the blog posts.
Ко ланта ло Канта
I had highly recommend this blog to my good friend, it’s so good
гидроизоляция подвала снаружи цены http://www.gidroizolyaciya-podvala-cena.ru .
торкретирование бетона цена торкретирование бетона цена .
Приватность данных становится роскошью kraken ссылка зеркало kraken актуальные ссылки kraken зеркало kraken ссылка зеркало
discoveramazingthings – Beautiful site with uplifting energy, everything feels inspiring and fun to browse.
dreamfindshub – Nice layout and visuals, found a few items that really stood out.
Entdecken Sie die besten Weinverkostungen in Wien auf https://weinverkostung.neocities.org/.
In der Stadt finden sich zahlreiche Weinguter, die eine lange Geschichte haben.
Die Weinverkostungen in Wien sind perfekt fur Kenner und Neulinge. Dabei lernen Gaste die Besonderheiten der regionalen Rebsorten kennen.
#### **2. Die besten Orte fur Weinverkostungen**
In Wien gibt es zahlreiche Lokale und Weinguter, die Verkostungen anbieten. Das bekannte Heurigenviertel in Grinzing ladt zu gemutlichen Verkostungen ein.
Einige Winzer veranstalten Fuhrungen durch ihre Kellereien. Zusatzlich konnen Gaste direkt beim Erzeuger kosten.
#### **3. Wiener Weinsorten und ihre Besonderheiten**
Wiener Weine sind vor allem fur ihre Vielfalt bekannt. Auch der fruchtige Grune Veltliner zahlt zu den bekanntesten Wei?weinen der Region.
Die Bodenbeschaffenheit und das Klima pragen den Geschmack. Dank nachhaltiger Anbaumethoden ist die Qualitat stets hoch.
#### **4. Tipps fur eine gelungene Weinverkostung**
Eine gute Vorbereitung macht die Verkostung noch angenehmer. Ein neutraler Geschmack im Mund vor der Verkostung verbessert das Erlebnis.
Gruppenverkostungen bringen zusatzlichen Spa?. Ein Weinjournal kann helfen, personliche Favoriten festzuhalten.
—
### **Spin-Template fur den Artikel**
#### **1. Einfuhrung in die Weinverkostung in Wien**
Wien ist nicht nur fur seine historischen Sehenswurdigkeiten bekannt, sondern auch fur seine lebendige Weinkultur.
#### **2. Die besten Orte fur Weinverkostungen**
Zusatzlich konnen Gaste direkt beim Erzeuger kosten.
#### **3. Wiener Weinsorten und ihre Besonderheiten**
Die mineralischen Noten der Wiener Weine sind besonders ausgepragt.
#### **4. Tipps fur eine gelungene Weinverkostung**
Gemeinsames Diskutieren uber die Aromen fordert den Austausch.
Искусственный интеллект учится каждый день kraken ссылка зеркало кракен онион тор кракен онион зеркало кракен даркнет маркет
her explanation hyperliquid
makelifesimpler – Nice clean interface, delivers exactly what the name promises.
this hyperlink hyperliquid exchange
бездепозитные слоты
1xbet t?rkiye giri? 1xbet t?rkiye giri? .
скрытый алкоголизм http://narkologicheskaya-klinika-23.ru .
Цифровая экономика формирует будущее kraken сайт зеркала kraken актуальные ссылки кракен ссылка kraken kraken официальные ссылки
shopfornewthings – The design feels modern and welcoming, will come back for more.
dreambelieveachieve – The positivity here stands out, love how motivational it feels.
Информационные технологии создают завтра кракен onion сайт kraken darknet market kraken darknet ссылка сайт kraken darknet
read this post here hyper liquid
Le code promo est supprime : entrez-le dans le champ « Code promo » et reclamez un bonus de bienvenue de 100% jusqu’a 130€, a utiliser dans les paris sportifs. Inscrivez-vous sur 1xBet ou via l’application mobile. Apres votre premier depot, vous activerez le code bonus. L’offre est valable pour toute l’annee 2026, et le bonus doit etre mise dans les 30 jours. Decouvrez plus d’informations sur le code promo via ce lien > https://1-x-betsport.blogspot.com/2025/10/code-promo-pour-1xbet-bonus-vip-100.html.
read hyperliquid
Кому нужен актуальный доступ к KRAKEN — вот рабочий вариант
Загружается стабильно.
Резервный адрес на случай блокировок: https://kristi.su/threads/37
Проверено лично.
getinspireddaily – Every section feels bright and encouraging, definitely worth a visit.
Компьютеры становятся умнее людей kraken онион kraken маркетплейс зеркало кракен ссылка кракен даркнет
browse around this web-site hyperliquid
exploreandcreate – Inspiring and creative site, perfect for exploring new ideas and products.
check hyper liquid
connectlearncreate – Inspiring and interactive site, perfect for learning and creating new ideas.
modernlivingtrend – Sleek design and modern vibe, really enjoyed browsing through this site.
dreambuycollection – Smooth browsing and stylish setup, everything feels nicely organized.
отделка подвала отделка подвала .
торкрет бетон цена торкрет бетон цена .
buildabetterworld – Clean and thoughtful design, everything loads quickly and looks professional.
trendyfindsonline – Smooth navigation and great visuals, everything loads really fast.
everydaystylecorner – The site feels cozy and stylish, perfect for daily fashion finds.
styleforliving – Found some great inspiration, the design feels polished and elegant.
Технологии делают жизнь удобнее кракен ссылка kraken онион kraken онион тор кракен онион
thetrendystore – Stylish vibe and smooth layout, great place for fashion lovers.
growwithconfidence – Everything looks inspiring and professional, great name and presentation.
discoveryourpotential – Nicely structured site, really easy to navigate and stay engaged.
getinspireddaily – Great flow from page to page, simple yet deeply motivating content.
globalstylemarket – Nice balance between aesthetics and functionality, perfect for online shopping.
https://vsemetonado.ru/
J’adore la vibe de Betzino Casino, il cree un monde de sensations fortes. La bibliotheque est pleine de surprises, comprenant des jeux optimises pour Bitcoin. Il rend le debut de l’aventure palpitant. Les agents sont toujours la pour aider. Le processus est transparent et rapide, parfois plus de promos regulieres dynamiseraient le jeu. En conclusion, Betzino Casino garantit un plaisir constant. Pour ajouter le site est rapide et immersif, booste le fun du jeu. Un avantage notable les evenements communautaires dynamiques, garantit des paiements rapides.
Cliquer maintenant|
Je suis enthousiaste a propos de Betzino Casino, on ressent une ambiance de fete. Les jeux proposes sont d’une diversite folle, offrant des sessions live immersives. Il amplifie le plaisir des l’entree. Le service est disponible 24/7. Les paiements sont securises et instantanes, cependant des recompenses additionnelles seraient ideales. Pour faire court, Betzino Casino offre une experience inoubliable. De surcroit la plateforme est visuellement electrisante, apporte une energie supplementaire. Egalement top les evenements communautaires dynamiques, renforce la communaute.
Aller Г la page|
Каждая компания теперь технологическая kraken ссылка на сайт kraken онион kraken онион тор кракен онион
Продолжение https://kra44cc.at
inspirechangealways – Love the message behind this one, uplifting and well designed.
dailydealzone – Awesome discounts displayed neatly, easy site to explore for deals.
узнать больше https://kra44cc.at
веб-сайт https://kra44cc.at
uniquelifestylehub – Stylish and modern, feels like a curated hub for unique lifestyle inspiration.
Цифровой мир требует новых знаний kraken официальные ссылки kraken onion kraken onion ссылка kraken onion зеркала
Pakistan Call girls is the most trusted Call girl agency, which offers young, attractive Call girls for both in-call and out-calls at all the regions of Pakistan. We have a large selection of young, attractive, and sexy Pakistan Call girls, including housewives, college and university students, celebrities, tiktok stars, and many more. You can easily hire one of best Call girls in Pakistan. Our sexy Pakistan Call girls are the best option for you, if you’re looking to book VIP Call girls .
Je suis emerveille par Viggoslots Casino, ca invite a plonger dans le fun. Les titres proposes sont d’une richesse folle, incluant des paris sportifs en direct. Avec des depots rapides et faciles. Le service client est de qualite. Les transactions sont fiables et efficaces, neanmoins des offres plus genereuses rendraient l’experience meilleure. En somme, Viggoslots Casino assure un fun constant. Par ailleurs la plateforme est visuellement electrisante, ajoute une vibe electrisante. Un plus les nombreuses options de paris sportifs, qui dynamise l’engagement.
https://viggoslotscasinobonusfr.com/|
J’ai une affection particuliere pour Viggoslots Casino, on ressent une ambiance festive. Le catalogue est un paradis pour les joueurs, avec des slots aux designs captivants. Le bonus de depart est top. Le service client est de qualite. Les retraits sont fluides et rapides, de temps a autre plus de promotions variees ajouteraient du fun. En somme, Viggoslots Casino vaut une exploration vibrante. Pour ajouter le site est rapide et immersif, ce qui rend chaque partie plus fun. Egalement excellent les tournois reguliers pour la competition, garantit des paiements rapides.
Lancer le site|
J’adore la vibe de Viggoslots Casino, on ressent une ambiance de fete. Le catalogue de titres est vaste, comprenant des jeux compatibles avec les cryptos. Il donne un elan excitant. Le support client est irreprochable. Les transactions sont toujours fiables, cependant plus de promos regulieres ajouteraient du peps. En conclusion, Viggoslots Casino est un incontournable pour les joueurs. Notons aussi le site est rapide et engageant, booste l’excitation du jeu. Particulierement fun les tournois reguliers pour s’amuser, garantit des paiements securises.
Obtenir les dГ©tails|
Je suis enthousiaste a propos de Betzino Casino, ca transporte dans un monde d’excitation. La variete des jeux est epoustouflante, incluant des paris sportifs en direct. Il amplifie le plaisir des l’entree. Les agents repondent avec rapidite. Le processus est simple et transparent, neanmoins des recompenses en plus seraient un bonus. En somme, Betzino Casino offre une aventure memorable. En complement la navigation est intuitive et lisse, ajoute une vibe electrisante. A mettre en avant les transactions en crypto fiables, renforce le lien communautaire.
Emmenez-moi lГ -bas|
J’ai une affection particuliere pour Viggoslots Casino, ca transporte dans un monde d’excitation. Le catalogue est un tresor de divertissements, incluant des paris sportifs pleins de vie. Le bonus de depart est top. Disponible a toute heure via chat ou email. Les paiements sont securises et rapides, a l’occasion quelques free spins en plus seraient bienvenus. En conclusion, Viggoslots Casino vaut une exploration vibrante. A noter le design est tendance et accrocheur, booste l’excitation du jeu. Particulierement fun le programme VIP avec des recompenses exclusives, qui motive les joueurs.
Voir le site|
simplelivinghub – Calming design and helpful ideas, perfect for minimal living inspiration.
Je suis captive par Viggoslots Casino, ca invite a plonger dans le fun. Les options de jeu sont infinies, proposant des jeux de table sophistiques. Il donne un avantage immediat. Le support est fiable et reactif. Les gains arrivent en un eclair, a l’occasion des bonus plus varies seraient un plus. En bref, Viggoslots Casino merite un detour palpitant. Par ailleurs l’interface est lisse et agreable, apporte une touche d’excitation. Un element fort les options de paris sportifs variees, offre des recompenses continues.
Cliquer maintenant|
Je suis captive par Viggoslots Casino, ca pulse comme une soiree animee. Le catalogue est un paradis pour les joueurs, proposant des jeux de cartes elegants. Il donne un avantage immediat. Les agents repondent avec efficacite. Les gains arrivent sans delai, mais plus de promos regulieres dynamiseraient le jeu. Dans l’ensemble, Viggoslots Casino offre une experience hors du commun. Pour ajouter l’interface est intuitive et fluide, donne envie de continuer l’aventure. A noter les evenements communautaires vibrants, cree une communaute vibrante.
Obtenir les dГ©tails|
Je suis epate par Betzino Casino, on ressent une ambiance de fete. Les options de jeu sont incroyablement variees, proposant des jeux de table classiques. Avec des depots fluides. Le support est pro et accueillant. Le processus est fluide et intuitif, par ailleurs plus de promotions variees ajouteraient du fun. Pour finir, Betzino Casino vaut une visite excitante. Pour couronner le tout le site est fluide et attractif, permet une immersion complete. Un atout les evenements communautaires vibrants, offre des recompenses continues.
Touchez ici|
everydayshoppingzone – Lots of variety here, looks like a solid everyday go-to shop.
https://theaterplaybill.com
Новые технологии рождают новые идеи кракен онион зеркало kraken рабочая ссылка onion сайт kraken onion kraken darknet
J’adore la vibe de Vbet Casino, il cree un monde de sensations fortes. La selection est riche et diversifiee, comprenant des titres adaptes aux cryptomonnaies. Il booste votre aventure des le depart. Les agents repondent avec efficacite. Les paiements sont securises et rapides, neanmoins des recompenses supplementaires dynamiseraient le tout. Pour finir, Vbet Casino vaut une visite excitante. En bonus la plateforme est visuellement electrisante, ce qui rend chaque partie plus fun. Un element fort les transactions crypto ultra-securisees, propose des avantages uniques.
Savoir plus|
Je ne me lasse pas de Vbet Casino, il propose une aventure palpitante. Le choix de jeux est tout simplement enorme, avec des slots aux graphismes modernes. Le bonus de depart est top. Le suivi est impeccable. Les gains arrivent en un eclair, de temps en temps des recompenses en plus seraient un bonus. En resume, Vbet Casino offre une experience inoubliable. Ajoutons aussi l’interface est intuitive et fluide, amplifie le plaisir de jouer. Un point fort les tournois frequents pour l’adrenaline, offre des recompenses regulieres.
https://vbetcasino777fr.com/|
J’adore la vibe de Posido Casino, ca offre un plaisir vibrant. Le choix de jeux est tout simplement enorme, proposant des jeux de cartes elegants. Il rend le debut de l’aventure palpitant. Le suivi est d’une fiabilite exemplaire. Les gains arrivent sans delai, mais encore des bonus diversifies seraient un atout. Au final, Posido Casino merite une visite dynamique. A noter la plateforme est visuellement dynamique, ajoute une vibe electrisante. A signaler les nombreuses options de paris sportifs, assure des transactions fiables.
En savoir davantage|
Je suis sous le charme de Vbet Casino, c’est une plateforme qui deborde de dynamisme. Les options de jeu sont infinies, comprenant des jeux crypto-friendly. Avec des depots rapides et faciles. Disponible 24/7 pour toute question. Le processus est clair et efficace, par moments des bonus plus varies seraient un plus. Pour conclure, Vbet Casino merite un detour palpitant. A mentionner le site est fluide et attractif, facilite une experience immersive. Un point cle les tournois reguliers pour s’amuser, assure des transactions fluides.
Commencer Г dГ©couvrir|
Je suis enthousiasme par Posido Casino, on y trouve une energie contagieuse. La selection de jeux est impressionnante, offrant des sessions live palpitantes. Le bonus de depart est top. Le support est rapide et professionnel. Les gains sont transferes rapidement, rarement plus de promotions frequentes boosteraient l’experience. Dans l’ensemble, Posido Casino est un immanquable pour les amateurs. D’ailleurs le site est rapide et style, facilite une experience immersive. Egalement excellent les tournois frequents pour l’adrenaline, offre des bonus exclusifs.
Ouvrir la page|
bestchoicecorner – Feels trustworthy and professional, I like the clean structure.
Je ne me lasse pas de Posido Casino, c’est une plateforme qui pulse avec energie. Le catalogue de titres est vaste, offrant des experiences de casino en direct. 100% jusqu’a 500 € + tours gratuits. Le suivi est d’une precision remarquable. Les gains arrivent en un eclair, cependant des recompenses additionnelles seraient ideales. Pour conclure, Posido Casino offre une aventure inoubliable. Notons egalement la navigation est intuitive et lisse, ce qui rend chaque session plus excitante. Un point cle les options variees pour les paris sportifs, offre des bonus exclusifs.
Regarder de plus prГЁs|
J’adore l’ambiance electrisante de Posido Casino, ca invite a l’aventure. La variete des jeux est epoustouflante, proposant des jeux de table sophistiques. Le bonus de bienvenue est genereux. Le support est efficace et amical. Les gains sont verses sans attendre, toutefois des offres plus consequentes seraient parfaites. Pour finir, Posido Casino est un endroit qui electrise. Par ailleurs la plateforme est visuellement electrisante, ajoute une vibe electrisante. Un point cle les transactions crypto ultra-securisees, cree une communaute vibrante.
Entrer|
Je suis emerveille par Posido Casino, on y trouve une vibe envoutante. Les options de jeu sont incroyablement variees, incluant des paris sur des evenements sportifs. Il offre un coup de pouce allechant. Le suivi est d’une fiabilite exemplaire. Les gains arrivent en un eclair, rarement des bonus plus frequents seraient un hit. Globalement, Posido Casino merite une visite dynamique. Ajoutons aussi le site est rapide et immersif, ajoute une vibe electrisante. Particulierement fun les transactions en crypto fiables, qui dynamise l’engagement.
Lire les dГ©tails|
Je suis sous le charme de Posido Casino, on y trouve une vibe envoutante. Les options de jeu sont incroyablement variees, proposant des jeux de table classiques. Avec des depots rapides et faciles. Le suivi est toujours au top. Les retraits sont fluides et rapides, neanmoins des bonus varies rendraient le tout plus fun. En bref, Posido Casino est un choix parfait pour les joueurs. De plus la plateforme est visuellement dynamique, ajoute une vibe electrisante. Un plus les evenements communautaires vibrants, garantit des paiements rapides.
Aller en ligne|
Без обновлений программ жить опасно kraken онион кракен онион тор кракен онион зеркало кракен даркнет маркет
fashionloverszone – Trendy and visually appealing, great spot for fashion enthusiasts.
trendyfindshub – The latest styles stand out nicely, super easy to browse.
shopyourfavorites – Great browsing flow, everything feels user-friendly and modern.
Программное обеспечение становится умнее kraken darknet market kraken onion kraken onion ссылка kraken onion зеркала
такой kra45.at
discoveramazingthings – Beautiful site with uplifting energy, everything feels inspiring and fun to browse.
discovergreatdeals – The concept fits the design perfectly, everything feels convenient to use.
styleforliving – Feels like a perfect balance of design and comfort, very polished.
https://vsemetonado.ru/
Диджитализация охватывает всё сайт kraken darknet kraken актуальные ссылки кракен ссылка kraken kraken официальные ссылки
learnandgrowtoday – Really smooth experience, everything here feels useful and well made.
веб-сайте kra45 cc
connectdiscovergrow – The site’s message feels powerful, encourages learning and growth daily.
findsomethingnew – Exciting and fresh design, makes discovering new things really enjoyable.
getinspiredtoday – Feels welcoming and creative, a great site to start the day with.
modernlivingstore – Sleek design and easy navigation, makes browsing modern living items enjoyable.
liveandexplore – The tone is uplifting and motivating, perfect for curious minds.
discoveramazingthings – Beautiful site with uplifting energy, everything feels inspiring and fun to browse.
modernlivingstyle – Everything loads quickly and feels thoughtfully designed for easy use.
liveandexplore – Smooth navigation and modern style, overall a pleasant experience.
makelifesimpler – Everything loads quickly and feels intuitive, exactly what simplicity means.
theworldawaits – Beautiful visuals and layout, gives a strong sense of wanderlust.
бездепозитные фриспины с выводом
Алкомаркет на высоте, обслуживание отличное. Алкоголь оригинальный, доставка надёжная и быстрая. Всё удобно. Теперь если нужна доставка спиртного ночью, пользуюсь только ими: https://dostavka-alcohol.ru/
Цифровая грамотность — необходимость кракен даркнет kraken маркетплейс зеркало кракен ссылка кракен даркнет
Chernov Creation Присоединяйся к Chernov Creation: Стань частью сообщества, где рождаются шедевры! Мы предлагаем не только ресурсы и инструменты, но и поддерживающую среду, где можно обмениваться опытом, находить единомышленников и получать конструктивную обратную связь. Участвуйте в мастер-классах, вебинарах и конкурсах, расширяйте свои знания и навыки, и, конечно же, делитесь своими работами с миром. Вместе мы можем достичь большего!
Сайт Трипскан TripScan top: Выбор тех, кто стремится к максимальной выгоде и комфорту. Присоединяйтесь к миллионам довольных пользователей и откройте мир путешествий с TripScan!
bestvaluecollection – Good range of products, prices seem fair and competitive too.
growwithconfidence – Love the encouraging theme here, simple and motivating content.
Some truly interesting info , well written and broadly user genial .
Алкомаркет приятно удивил скоростью работы. Даже в выходные ночью доставляют без задержек. Всё упаковано отлично, качество на высоте. Теперь если нужна доставка алкоголя в москве, беру здесь – https://dostavka-alcohol.ru/
ИТ объединяет науку и бизнес кракен ссылка onion kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
Je suis accro a Betzino Casino, c’est un lieu ou l’adrenaline coule a flots. Le choix de jeux est tout simplement enorme, comprenant des jeux optimises pour Bitcoin. Il donne un avantage immediat. Le support est pro et accueillant. Les retraits sont ultra-rapides, par ailleurs quelques spins gratuits en plus seraient top. Pour conclure, Betzino Casino merite un detour palpitant. A souligner le site est fluide et attractif, donne envie de prolonger l’aventure. Particulierement interessant les nombreuses options de paris sportifs, assure des transactions fiables.
Commencer Г lire|
Je suis enthousiasme par Betzino Casino, ca pulse comme une soiree animee. Les options de jeu sont incroyablement variees, incluant des paris sur des evenements sportifs. Avec des transactions rapides. Le suivi est toujours au top. Les retraits sont lisses comme jamais, cependant quelques tours gratuits supplementaires seraient cool. En resume, Betzino Casino est un immanquable pour les amateurs. Pour ajouter la plateforme est visuellement dynamique, amplifie le plaisir de jouer. Particulierement interessant les evenements communautaires dynamiques, propose des privileges personnalises.
Explorer davantage|
shopwithstylehub – Fun and stylish site, everything looks modern and well presented.
shopthemoment – Trendy design and clear visuals, makes browsing super enjoyable.
findyourmoments – Beautiful concept and elegant look, I enjoyed exploring this one.
Технологии — путь к комфорту kraken onion kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
https://theaterplaybill.com
yourcreativejourney – Love the artistic vibe here, everything feels inspiring and original.
uniquelifestylehub – The layout stands out, feels classy and well put together.
5G открывает новые возможности kraken актуальные ссылки kraken онион kraken онион тор кракен онион
I loved your idea there, I tell you blogs are so exciting sometimes like looking into people’s private life’s and work. Every new remark wonderful in its own right.
yourcreativejourney – Love the artistic vibe here, everything feels inspiring and original.
connectwithideas – Clean layout and inspiring content, perfect for exploring new concepts.
purefashionmarket – Fantastic collection of looks, the site design feels elegant.
Технологии — путь к комфорту kraken ссылка зеркало kraken рабочая ссылка onion сайт kraken onion kraken darknet
yourmomentstarts – Uplifting and simple site, love how it encourages taking action.
createinspirelead – Motivating design and smooth layout, really captures a positive energy.
findyourpathnow – Love the message here, makes you reflect and feel inspired instantly.
dreambuyoutlet – Great presentation and fast loading, enjoyable shopping experience overall.
Технологии развиваются с невероятной скоростью кракен onion kraken darknet market kraken darknet ссылка сайт kraken darknet
findyourmoments – Lovely concept and warm design, makes browsing feel calm and joyful.
freshfashioncorner – The name fits perfectly, everything feels updated and chic throughout.
freshfashioncorner – Love how fashionable and fresh the overall feel of this site is.
J’adore le dynamisme de Betzino Casino, c’est un lieu ou l’adrenaline coule a flots. La variete des jeux est epoustouflante, comprenant des titres adaptes aux cryptomonnaies. Le bonus initial est super. Les agents repondent avec efficacite. Les paiements sont securises et instantanes, de temps en temps des bonus varies rendraient le tout plus fun. En bref, Betzino Casino est un immanquable pour les amateurs. En extra le design est tendance et accrocheur, apporte une energie supplementaire. Egalement excellent les paiements securises en crypto, offre des recompenses continues.
Lancer le site|
лучшие казино с бонусом без депозита
J’ai une affection particuliere pour Viggoslots Casino, ca transporte dans un univers de plaisirs. Le catalogue est un paradis pour les joueurs, avec des slots aux graphismes modernes. Il rend le debut de l’aventure palpitant. Le support est rapide et professionnel. Les paiements sont surs et fluides, cependant plus de promotions frequentes boosteraient l’experience. En somme, Viggoslots Casino vaut une visite excitante. En plus l’interface est simple et engageante, ce qui rend chaque session plus palpitante. Un point fort les competitions regulieres pour plus de fun, assure des transactions fluides.
http://www.viggoslotscasino365fr.com|
shopwithstylehub – Very trendy look and smooth flow, makes shopping fun and effortless.
findjoytoday – The design is uplifting and smooth, perfect for spreading good energy.
simplevalueplace – Straightforward design, loads fast, and delivers exactly what’s promised.
explorethefuture – Futuristic and sleek design, makes browsing feel exciting and innovative.
J’ai une affection particuliere pour Betzino Casino, ca invite a plonger dans le fun. Le choix est aussi large qu’un festival, comprenant des jeux optimises pour Bitcoin. Il offre un demarrage en fanfare. Le service est disponible 24/7. Les retraits sont ultra-rapides, parfois des recompenses additionnelles seraient ideales. Pour finir, Betzino Casino offre une experience inoubliable. En extra le design est tendance et accrocheur, ce qui rend chaque moment plus vibrant. Egalement excellent les evenements communautaires vibrants, cree une communaute soudee.
Continuer Г lire|
Je suis totalement conquis par Betzino Casino, il cree une experience captivante. La selection est riche et diversifiee, incluant des paris sportifs pleins de vie. Avec des transactions rapides. Le support est rapide et professionnel. Les retraits sont fluides et rapides, de temps a autre quelques tours gratuits en plus seraient geniaux. Au final, Betzino Casino vaut une exploration vibrante. En extra l’interface est intuitive et fluide, booste le fun du jeu. Un element fort les evenements communautaires vibrants, cree une communaute soudee.
Essayer maintenant|
Je suis epate par Viggoslots Casino, il propose une aventure palpitante. Il y a une abondance de jeux excitants, proposant des jeux de casino traditionnels. Il offre un coup de pouce allechant. Le support client est irreprochable. Les retraits sont simples et rapides, de temps en temps quelques spins gratuits en plus seraient top. En conclusion, Viggoslots Casino vaut une exploration vibrante. Notons aussi le design est tendance et accrocheur, facilite une experience immersive. Particulierement fun le programme VIP avec des privileges speciaux, assure des transactions fluides.
AccГ©der Г la page|
Je suis emerveille par Betzino Casino, on ressent une ambiance de fete. On trouve une gamme de jeux eblouissante, comprenant des jeux optimises pour Bitcoin. 100% jusqu’a 500 € plus des tours gratuits. Disponible 24/7 par chat ou email. Les transactions sont toujours securisees, mais encore des offres plus genereuses seraient top. Au final, Betzino Casino vaut une exploration vibrante. D’ailleurs l’interface est simple et engageante, ajoute une vibe electrisante. Un atout le programme VIP avec des recompenses exclusives, assure des transactions fluides.
Voir les dГ©tails|
Технологии делают работу быстрее кракен ссылка onion kraken рабочая ссылка onion сайт kraken onion kraken darknet
purefashionmarket – Great fashion selection and clean visuals, easy to explore and shop.
findjoytoday – Positive and uplifting, the site really feels cheerful and motivating.
findjoyeveryday – Positive energy throughout, design fits the uplifting name perfectly.
J’adore la vibe de Vbet Casino, on y trouve une vibe envoutante. Les options de jeu sont infinies, avec des machines a sous aux themes varies. Il offre un coup de pouce allechant. Le service client est excellent. Les gains arrivent en un eclair, occasionnellement plus de promotions variees ajouteraient du fun. Pour conclure, Vbet Casino est un must pour les passionnes. En extra la navigation est claire et rapide, apporte une energie supplementaire. Un avantage notable le programme VIP avec des recompenses exclusives, garantit des paiements securises.
Entrer|
Информационные технологии создают завтра kra ссылка kraken онион kraken онион тор кракен онион
discoveramazingthings – Beautiful site with uplifting energy, everything feels inspiring and fun to browse.
Je suis totalement conquis par Vbet Casino, il procure une sensation de frisson. Les options de jeu sont infinies, avec des machines a sous visuellement superbes. Il amplifie le plaisir des l’entree. Le support est efficace et amical. Les gains sont transferes rapidement, mais des offres plus genereuses seraient top. En bref, Vbet Casino offre une experience hors du commun. Notons egalement la plateforme est visuellement vibrante, apporte une touche d’excitation. Particulierement cool les tournois frequents pour l’adrenaline, propose des privileges sur mesure.
Visiter maintenant|
Je suis sous le charme de Vbet Casino, on y trouve une vibe envoutante. Il y a un eventail de titres captivants, proposant des jeux de table classiques. Le bonus initial est super. Le suivi est d’une precision remarquable. Les retraits sont simples et rapides, quelquefois quelques spins gratuits en plus seraient top. Globalement, Vbet Casino merite un detour palpitant. Notons aussi le design est style et moderne, donne envie de continuer l’aventure. Egalement top les paiements en crypto rapides et surs, propose des privileges personnalises.
DГ©couvrir|
modernhomefinds – Stylish home ideas and layout, feels cozy and modern at once.
Je suis totalement conquis par Posido Casino, ca offre un plaisir vibrant. La gamme est variee et attrayante, avec des machines a sous visuellement superbes. Le bonus d’inscription est attrayant. Les agents sont rapides et pros. Les retraits sont ultra-rapides, cependant des offres plus consequentes seraient parfaites. Dans l’ensemble, Posido Casino assure un fun constant. Pour ajouter la navigation est intuitive et lisse, ajoute une touche de dynamisme. Egalement excellent les options de paris sportifs variees, propose des avantages sur mesure.
Tout apprendre|
Je suis enthousiaste a propos de Vbet Casino, on ressent une ambiance festive. Les titres proposes sont d’une richesse folle, avec des slots aux designs captivants. Le bonus d’inscription est attrayant. Le suivi est toujours au top. Le processus est transparent et rapide, de temps a autre des recompenses en plus seraient un bonus. Dans l’ensemble, Vbet Casino offre une aventure inoubliable. Ajoutons que la plateforme est visuellement captivante, ce qui rend chaque partie plus fun. Un bonus les tournois reguliers pour s’amuser, propose des privileges sur mesure.
Explorer plus|
Je suis completement seduit par Posido Casino, c’est une plateforme qui pulse avec energie. Le choix est aussi large qu’un festival, offrant des tables live interactives. 100% jusqu’a 500 € plus des tours gratuits. Le support client est irreprochable. Les paiements sont securises et instantanes, mais des recompenses supplementaires seraient parfaites. En resume, Posido Casino est une plateforme qui fait vibrer. Notons aussi la navigation est simple et intuitive, ce qui rend chaque session plus palpitante. A souligner les tournois frequents pour l’adrenaline, offre des bonus constants.
http://www.posidocasino366fr.com|
Je suis enthousiasme par Posido Casino, ca offre une experience immersive. La bibliotheque est pleine de surprises, avec des slots aux graphismes modernes. Il booste votre aventure des le depart. Les agents sont rapides et pros. Le processus est simple et transparent, neanmoins des recompenses supplementaires dynamiseraient le tout. Dans l’ensemble, Posido Casino assure un fun constant. Notons egalement le site est rapide et immersif, booste l’excitation du jeu. A noter les nombreuses options de paris sportifs, qui dynamise l’engagement.
DГ©couvrir dГЁs maintenant|
Je ne me lasse pas de Posido Casino, il procure une sensation de frisson. Les jeux proposes sont d’une diversite folle, proposant des jeux de casino traditionnels. Avec des depots fluides. Le support client est irreprochable. Les paiements sont surs et efficaces, cependant des recompenses additionnelles seraient ideales. En conclusion, Posido Casino est un lieu de fun absolu. En extra la navigation est claire et rapide, permet une plongee totale dans le jeu. Egalement excellent les tournois reguliers pour la competition, qui booste la participation.
Commencer Г dГ©couvrir|
Без ИТ нет коммуникации кракен даркнет kraken онион kraken онион тор кракен онион
Ко ланта остров ло Канта
makeimpacttoday – Motivational and well-organized, great for users wanting to take action.
discoveramazingoffers – Fun experience browsing deals here, everything feels easy and inviting.
https://theaterplaybill.com
Информационные технологии меняют всё вокруг нас кракен ссылка onion kraken зеркало рабочее актуальные зеркала kraken kraken сайт зеркала
trendycollectionhub – Stylish and modern layout, perfect for exploring new fashion trends.
inspirechangealways – Very motivating site, love the positive energy and smooth layout.
findjoyeveryday – Bright, cheerful site design that instantly lifts up your mood.
Технологии — это язык будущего kraken darknet kraken onion kraken onion ссылка kraken onion зеркала
Good post. I study something more difficult on different blogs everyday. It’s going to always be stimulating to learn content material from other writers and observe a little bit one thing from their store. I’d prefer to use some with the content material on my blog whether you don’t mind. Natually I’ll give you a link in your web blog. Thanks for sharing.
Je suis sous le charme de Betway Casino, c’est un lieu ou l’adrenaline coule a flots. Le choix de jeux est tout simplement enorme, incluant des paris sur des evenements sportifs. Il booste votre aventure des le depart. Les agents repondent avec rapidite. Les paiements sont surs et efficaces, occasionnellement des recompenses supplementaires dynamiseraient le tout. Globalement, Betway Casino garantit un plaisir constant. Notons egalement la navigation est intuitive et lisse, incite a rester plus longtemps. Particulierement cool les paiements en crypto rapides et surs, propose des privileges personnalises.
Obtenir plus|
dreambuyoutlet – Smooth browsing experience, stylishly presented products make shopping enjoyable.
J’ai un veritable coup de c?ur pour Betway Casino, c’est une plateforme qui deborde de dynamisme. Le choix de jeux est tout simplement enorme, proposant des jeux de casino traditionnels. Il offre un coup de pouce allechant. Les agents repondent avec efficacite. Les retraits sont fluides et rapides, cependant des recompenses additionnelles seraient ideales. Pour faire court, Betway Casino est un lieu de fun absolu. A signaler le design est tendance et accrocheur, donne envie de prolonger l’aventure. Un point cle les options variees pour les paris sportifs, propose des avantages uniques.
Continuer Г lire|
everydayshoppinghub – Very convenient and easy to use, makes daily shopping simple and smooth.
dreambuycollection – Found some really cool items, great variety and layout overall.
trendingstyleworld – Well organized and full of fresh ideas, browsing is super smooth.
перевозки новосибирск Караганда
yourmomentstarts – Great first impression, the name and vibe feel truly motivational.
everydayshoppingzone – Great place for daily shopping, everything feels easy and convenient.
Je suis emerveille par Belgium Casino, il propose une aventure palpitante. La bibliotheque est pleine de surprises, incluant des paris sur des evenements sportifs. Le bonus initial est super. Les agents repondent avec rapidite. Les retraits sont simples et rapides, malgre tout des recompenses additionnelles seraient ideales. En conclusion, Belgium Casino offre une aventure inoubliable. Par ailleurs la navigation est intuitive et lisse, apporte une touche d’excitation. Un plus les tournois reguliers pour s’amuser, propose des avantages sur mesure.
Rejoindre maintenant|
Je suis fascine par Belgium Casino, on ressent une ambiance de fete. La selection de jeux est impressionnante, proposant des jeux de table sophistiques. Avec des depots fluides. Le suivi est toujours au top. Les gains arrivent en un eclair, quelquefois plus de promos regulieres ajouteraient du peps. En somme, Belgium Casino offre une aventure inoubliable. Par ailleurs l’interface est intuitive et fluide, apporte une energie supplementaire. Un avantage le programme VIP avec des niveaux exclusifs, offre des bonus constants.
Aller plus loin|
startanewjourney – Feels warm, positive, and easy to use — loved exploring it.
J’ai une passion debordante pour Betway Casino, c’est une plateforme qui pulse avec energie. La gamme est variee et attrayante, offrant des experiences de casino en direct. 100% jusqu’a 500 € + tours gratuits. Le support est efficace et amical. Les transactions sont d’une fiabilite absolue, bien que des offres plus genereuses rendraient l’experience meilleure. En bref, Betway Casino est un endroit qui electrise. A souligner le design est style et moderne, facilite une immersion totale. Un point fort les transactions crypto ultra-securisees, renforce la communaute.
Commencer maintenant|
Je ne me lasse pas de Betify Casino, c’est une plateforme qui pulse avec energie. La gamme est variee et attrayante, proposant des jeux de table sophistiques. Il offre un coup de pouce allechant. Disponible a toute heure via chat ou email. Les gains arrivent en un eclair, toutefois des recompenses additionnelles seraient ideales. En resume, Betify Casino offre une experience inoubliable. A noter l’interface est intuitive et fluide, booste l’excitation du jeu. Un element fort les competitions regulieres pour plus de fun, propose des avantages sur mesure.
https://betifycasinoappfr.com/|
J’adore l’energie de Gamdom Casino, ca pulse comme une soiree animee. Le choix de jeux est tout simplement enorme, comprenant des jeux crypto-friendly. 100% jusqu’a 500 € avec des free spins. Le support client est irreprochable. Les paiements sont surs et efficaces, cependant des recompenses supplementaires dynamiseraient le tout. En conclusion, Gamdom Casino offre une aventure memorable. A souligner la navigation est simple et intuitive, ce qui rend chaque moment plus vibrant. Particulierement fun le programme VIP avec des niveaux exclusifs, offre des bonus constants.
Voir la page d’accueil|
J’ai une passion debordante pour Betify Casino, ca invite a l’aventure. On trouve une profusion de jeux palpitants, offrant des tables live interactives. 100% jusqu’a 500 € avec des free spins. Les agents repondent avec rapidite. Les transactions sont toujours fiables, en revanche des bonus plus varies seraient un plus. Pour conclure, Betify Casino vaut une visite excitante. A noter le design est style et moderne, facilite une experience immersive. Un plus le programme VIP avec des niveaux exclusifs, assure des transactions fiables.
Tout apprendre|
purevalueoutlet – Great selection of items, everything feels organized and easy to find.
fashionloverszone – Trendy, inspiring, and fun to explore — absolutely love this page.
Je suis totalement conquis par Betway Casino, on ressent une ambiance de fete. Le catalogue est un tresor de divertissements, avec des machines a sous visuellement superbes. 100% jusqu’a 500 € + tours gratuits. Le support est pro et accueillant. Le processus est clair et efficace, occasionnellement des offres plus genereuses rendraient l’experience meilleure. En fin de compte, Betway Casino est un lieu de fun absolu. A mentionner la navigation est simple et intuitive, incite a rester plus longtemps. Un element fort le programme VIP avec des niveaux exclusifs, offre des recompenses continues.
Naviguer sur le site|
dreamfindshub – Nice balance of visuals and ideas, definitely worth spending time on.
J’adore le dynamisme de Belgium Casino, on y trouve une energie contagieuse. Les options de jeu sont incroyablement variees, offrant des tables live interactives. 100% jusqu’a 500 € plus des tours gratuits. Le support est pro et accueillant. Les transactions sont toujours securisees, neanmoins des recompenses en plus seraient un bonus. Globalement, Belgium Casino est un incontournable pour les joueurs. D’ailleurs le design est style et moderne, ce qui rend chaque session plus excitante. A signaler le programme VIP avec des niveaux exclusifs, renforce le lien communautaire.
Visiter maintenant|
Je suis enthousiasme par Betway Casino, on y trouve une vibe envoutante. La gamme est variee et attrayante, proposant des jeux de table classiques. Il donne un elan excitant. Le suivi est d’une precision remarquable. Le processus est transparent et rapide, malgre tout plus de promotions variees ajouteraient du fun. En resume, Betway Casino est un choix parfait pour les joueurs. Ajoutons que l’interface est intuitive et fluide, amplifie le plaisir de jouer. Un element fort les tournois frequents pour l’adrenaline, garantit des paiements securises.
DГ©couvrir les offres|
Je suis accro a Gamdom Casino, ca invite a plonger dans le fun. Les jeux proposes sont d’une diversite folle, avec des slots aux designs captivants. Avec des depots fluides. Disponible 24/7 par chat ou email. Les paiements sont securises et rapides, quelquefois des offres plus genereuses rendraient l’experience meilleure. Dans l’ensemble, Gamdom Casino offre une experience hors du commun. Notons egalement la navigation est fluide et facile, amplifie le plaisir de jouer. Un avantage les evenements communautaires dynamiques, offre des bonus constants.
http://www.gamdomcasino366fr.com|
Je suis completement seduit par Gamdom Casino, c’est une plateforme qui deborde de dynamisme. Les titres proposes sont d’une richesse folle, incluant des paris sportifs en direct. Avec des depots rapides et faciles. Le service client est de qualite. Les gains sont transferes rapidement, rarement plus de promos regulieres ajouteraient du peps. En conclusion, Gamdom Casino merite un detour palpitant. Notons egalement la navigation est claire et rapide, amplifie le plaisir de jouer. Egalement super les evenements communautaires dynamiques, qui stimule l’engagement.
Aller au site|
Je suis epate par Betify Casino, il cree un monde de sensations fortes. Le catalogue est un paradis pour les joueurs, proposant des jeux de table sophistiques. 100% jusqu’a 500 € avec des free spins. Le support client est irreprochable. Les transactions sont fiables et efficaces, neanmoins des bonus diversifies seraient un atout. En resume, Betify Casino est un must pour les passionnes. Pour couronner le tout la plateforme est visuellement electrisante, apporte une touche d’excitation. A mettre en avant le programme VIP avec des avantages uniques, assure des transactions fiables.
Tout apprendre|
classychoiceoutlet – Beautifully done website, love the classy touch on every page.
shopfornewthings – The site loads quickly and feels modern, perfect for everyday shopping.
changeyourfuture – Inspiring design and positive message, really motivates you to take action.
getmoreforshop – Nice design, smooth browsing, and genuine offers make it stand out.
Its just like you read my thoughts! It’s like reading about my family.
dreambelieveachieve – Love the positivity here, beautiful concept and very smooth browsing.
changeyourdirection – Fresh and inspiring layout, really encourages exploration and new perspectives.
trendyfindshub – Love the trendy vibes, the site is simple yet stylish to browse.
brightfashionfinds – Colorful and trendy, makes browsing fashion items enjoyable and exciting.
бездепозитные бонусы казино за установку приложения Бездепозитные бонусы за регистрацию с возможностью вывода – это отличный шанс начать играть в онлайн-казино без финансовых вложений и с реальным шансом на выигрыш. Главное – внимательно читайте условия каждой акции, чтобы понимать все правила и требования. Удачи в игре!
производители рулонных штор http://www.avtomaticheskie-rulonnye-shtory1.ru .
электрические рулонные шторы электрические рулонные шторы .
1xbet tr giri? http://1xbet-giris-2.com .
1xbet giri? 2025 1xbet giri? 2025 .
1xbet yeni giri? 1xbet yeni giri? .
yourdailyshoppinghub – Nicely structured site, makes daily shopping easier and more enjoyable.
makepositivechanges – Uplifting and encouraging site, everything feels fresh and motivating.
бесплатные спины за регистрацию без депозита с выводом Бездепозитные бонусы за регистрацию с возможностью вывода – это отличный шанс начать играть в онлайн-казино без финансовых вложений и с реальным шансом на выигрыш. Главное – внимательно читайте условия каждой акции, чтобы понимать все правила и требования. Удачи в игре!
learnandgrowtoday – Very informative and inspiring, perfect for daily learning and personal growth.
discoverandcreate – Creative and engaging, perfect place to find ideas and inspiration.
freshfashioncorner – Trendy looks and fresh designs, definitely one to revisit often.
кликните сюда https://kra44at.at
бездепозитные бонусы казино без отыгрыша Бездепозитные бонусы – это отличная возможность попробовать свои силы в онлайн-казино без риска для собственных средств. Однако, прежде чем активировать бонус, внимательно ознакомьтесь с его условиями, чтобы избежать разочарований в будущем. Удачи в игре!
bestvaluecollection – Excellent deals and easy navigation, really makes shopping enjoyable.
discoverbetteroptions – Clean and well-organized, makes finding better deals and options easy.
buildsomethingnew – Inspiring message and simple design, feels fresh and full of ideas.
findyourdreamplace – Beautiful visuals and easy navigation, makes exploring dream locations enjoyable.
Читать далее https://kra44at.at/
discoverhomeessentials – Great shopping experience overall, perfect for upgrading your living space.
purestylemarket – Very stylish and modern, perfect for exploring new fashion items.
перейдите на этот сайт kra45 at
thinkcreateachieve – Clean layout with inspiring message, makes visitors feel empowered instantly.
рулонные шторы с электроприводом и дистанционным управлением http://www.avtomaticheskie-rulonnye-shtory1.ru .
купить электрические рулонные шторы rulonnye-shtory-s-elektroprivodom7.ru .
bahis siteler 1xbet bahis siteler 1xbet .
1xbet yeni giri? http://www.1xbet-giris-2.com .
1xbet giri? linki http://www.1xbet-giris-4.com .
перейти на сайт kra44 at
Следующая страница https://kra44at.at/
findyourmoments – Calm and inspiring design, a lovely place to explore and reflect.
A cool post there mate ! Thank you for posting.
Смотреть здесь https://kra44at.at
Je suis fascine par Betway Casino, ca offre une experience immersive. Le choix de jeux est tout simplement enorme, incluant des paris sur des evenements sportifs. Avec des depots rapides et faciles. Le support est fiable et reactif. Les retraits sont lisses comme jamais, toutefois plus de promos regulieres dynamiseraient le jeu. En somme, Betway Casino garantit un amusement continu. A signaler la plateforme est visuellement dynamique, ce qui rend chaque partie plus fun. Un atout les nombreuses options de paris sportifs, offre des recompenses continues.
Visiter le site|
classyfindsonline – Love the classy layout, everything looks elegant and well arranged.
explorewhatspossible – The name fits perfectly, great site for exploring creativity and motivation.
Je suis enthousiaste a propos de Betway Casino, ca transporte dans un monde d’excitation. Le choix est aussi large qu’un festival, proposant des jeux de casino traditionnels. Le bonus d’inscription est attrayant. Le support est rapide et professionnel. Le processus est clair et efficace, malgre tout des offres plus genereuses rendraient l’experience meilleure. En bref, Betway Casino offre une aventure memorable. En extra la plateforme est visuellement electrisante, booste le fun du jeu. Egalement genial le programme VIP avec des avantages uniques, assure des transactions fiables.
Jeter un coup d’œil|
findperfectgift – Clean and colorful layout, perfect place to discover creative gift options.
createbettertomorrow – Truly inspiring name and content; a refreshing space for motivation seekers.
discovergreatideas – Smooth and simple layout, makes exploring creative ideas really fun.
нажмите здесь https://kra44at.at
imaginelearnexplore – Inspiring and informative, great site for learning and discovering new things.
thepowerofgrowth – A wonderful reminder that growth is the key to success and progress.
staycuriousdaily – Feels like a daily reminder to explore new things and ideas.
discoverinfiniteideas – A motivational and creative concept that encourages open-minded exploration.
globalfashionzone – Trendy and user-friendly, excellent layout for browsing worldwide fashion trends.
everydayfindsmarket – Feels like a store where you can discover something useful daily.
на этом сайте kra at
веб-сайте kra45.cc
бездепозитные бонусы казино с выводом без пополнения за регистрацию “Хотите попробовать азартные игры, но боитесь потерять свои деньги? Есть отличное решение – бездепозитные бонусы! Это ваш шанс получить реальные деньги или фриспины (бесплатные вращения) просто за регистрацию, без необходимости вносить собственные средства. Идеально, чтобы освоиться, изучить правила игры и, возможно, даже выиграть что-то на старте. Не упустите возможность начать играть без риска!”
этот сайт kra45 cc
urbanfashioncorner – Stylish urban vibe, makes exploring fashion items really fun and engaging.
smartfashionboutique – Beautifully curated items and smooth browsing, feels premium and trendy.
yourvisionawaits – Inspiring and motivating, makes exploring ideas and goals really enjoyable.
yourmomenttoshine – Bright and uplifting, really encourages users to feel confident and motivated.
такой https://kra44at.at
trendinghomeideas – Creative and practical ideas for home, very nice experience overall.
веб-сайте https://kra44cc.at
exploreinnovativeideas – Great place to discover fresh ideas, very clean and inspiring layout.
stayfocusedandgrow – Positive and clean layout, perfect for personal growth and focus.
changeyourperspective – Modern and clean design, perfect for exploring fresh ideas and viewpoints.
рулонная штора автоматическая http://www.avtomaticheskie-rulonnye-shtory1.ru/ .
1x giri? 1xbet-giris-2.com .
рулонные шторы с электроприводом рулонные шторы с электроприводом .
1xbet lite http://www.1xbet-giris-4.com .
findyourtrend – Stylish and trendy, makes discovering new fashion items simple and fun.
startanewjourney – Simple and inviting design, feels like a site full of possibilities.
фриспины за регистрацию без депозита с выводом без отыгрыша
freshfashionmarket – Bright and trendy design, makes shopping for new fashion pieces enjoyable.
Je suis bluffe par Betway Casino, il procure une sensation de frisson. On trouve une gamme de jeux eblouissante, avec des slots aux designs captivants. Le bonus de depart est top. Les agents sont toujours la pour aider. Les retraits sont lisses comme jamais, mais encore des recompenses supplementaires seraient parfaites. Au final, Betway Casino garantit un plaisir constant. En complement le design est moderne et attrayant, incite a prolonger le plaisir. Particulierement cool les tournois reguliers pour la competition, garantit des paiements securises.
Ouvrir la page|
J’adore la vibe de Belgium Casino, il cree une experience captivante. La bibliotheque est pleine de surprises, avec des machines a sous aux themes varies. Il offre un demarrage en fanfare. Le suivi est toujours au top. Le processus est simple et transparent, par contre des recompenses supplementaires dynamiseraient le tout. En bref, Belgium Casino vaut une exploration vibrante. Par ailleurs le design est style et moderne, ce qui rend chaque session plus excitante. Un plus les paiements en crypto rapides et surs, propose des avantages sur mesure.
Explorer le site|
Je suis bluffe par Betway Casino, ca transporte dans un univers de plaisirs. Le catalogue est un tresor de divertissements, comprenant des titres adaptes aux cryptomonnaies. Il offre un coup de pouce allechant. Le service client est de qualite. Le processus est clair et efficace, mais encore quelques spins gratuits en plus seraient top. En conclusion, Betway Casino merite une visite dynamique. A noter la navigation est claire et rapide, booste l’excitation du jeu. Un element fort les nombreuses options de paris sportifs, offre des recompenses continues.
http://www.casinobetwayfr.com|
J’adore l’energie de Belgium Casino, il cree une experience captivante. Il y a une abondance de jeux excitants, comprenant des titres adaptes aux cryptomonnaies. Le bonus de depart est top. Le support est efficace et amical. Le processus est transparent et rapide, par ailleurs quelques spins gratuits en plus seraient top. Pour finir, Belgium Casino assure un fun constant. De plus le site est fluide et attractif, ce qui rend chaque session plus palpitante. Un avantage notable les tournois reguliers pour s’amuser, offre des recompenses regulieres.
Aller sur le web|
urbanwearstudio – Trendy and stylish, excellent hub for urban fashion and modern streetwear.
J’ai une affection particuliere pour Gamdom Casino, il offre une experience dynamique. Les options de jeu sont infinies, proposant des jeux de table sophistiques. Le bonus initial est super. Disponible 24/7 par chat ou email. Les gains sont verses sans attendre, de temps a autre quelques tours gratuits en plus seraient geniaux. En resume, Gamdom Casino offre une aventure inoubliable. Notons egalement l’interface est lisse et agreable, ajoute une vibe electrisante. A signaler le programme VIP avec des avantages uniques, propose des avantages uniques.
Aller plus loin|
J’adore l’ambiance electrisante de Belgium Casino, il cree un monde de sensations fortes. Le choix est aussi large qu’un festival, offrant des tables live interactives. 100% jusqu’a 500 € avec des spins gratuits. Le support client est irreprochable. Les retraits sont simples et rapides, toutefois plus de promotions variees ajouteraient du fun. Globalement, Belgium Casino est un immanquable pour les amateurs. A noter la navigation est intuitive et lisse, booste le fun du jeu. Un plus le programme VIP avec des niveaux exclusifs, offre des recompenses regulieres.
Parcourir maintenant|
Je ne me lasse pas de Betway Casino, ca transporte dans un univers de plaisirs. Les options sont aussi vastes qu’un horizon, avec des slots aux designs captivants. Il offre un demarrage en fanfare. Le service client est de qualite. Les transactions sont toujours fiables, a l’occasion des recompenses en plus seraient un bonus. En bref, Betway Casino est une plateforme qui pulse. En bonus la plateforme est visuellement dynamique, ajoute une touche de dynamisme. Un point fort le programme VIP avec des avantages uniques, assure des transactions fluides.
DГ©couvrir maintenant|
J’ai un faible pour Gamdom Casino, c’est une plateforme qui deborde de dynamisme. La selection est riche et diversifiee, incluant des paris sportifs en direct. Le bonus d’inscription est attrayant. Les agents sont toujours la pour aider. Les gains sont transferes rapidement, toutefois quelques tours gratuits supplementaires seraient cool. En conclusion, Gamdom Casino offre une experience inoubliable. En extra le design est tendance et accrocheur, facilite une experience immersive. Un atout les options de paris sportifs variees, garantit des paiements securises.
Regarder de plus prГЁs|
J’ai un faible pour Gamdom Casino, ca transporte dans un univers de plaisirs. Le choix de jeux est tout simplement enorme, incluant des paris sportifs en direct. Il offre un demarrage en fanfare. Le suivi est toujours au top. Le processus est clair et efficace, en revanche des bonus varies rendraient le tout plus fun. Dans l’ensemble, Gamdom Casino assure un fun constant. Par ailleurs l’interface est lisse et agreable, facilite une experience immersive. Egalement top les tournois frequents pour l’adrenaline, offre des recompenses regulieres.
Cliquez ici|
Je ne me lasse pas de Betify Casino, on ressent une ambiance festive. La selection est riche et diversifiee, offrant des sessions live palpitantes. Le bonus de depart est top. Disponible a toute heure via chat ou email. Le processus est transparent et rapide, neanmoins des offres plus importantes seraient super. En somme, Betify Casino garantit un amusement continu. Ajoutons aussi la navigation est fluide et facile, booste l’excitation du jeu. Egalement top le programme VIP avec des niveaux exclusifs, qui motive les joueurs.
Cliquer maintenant|
Je suis bluffe par Betify Casino, il propose une aventure palpitante. La selection est riche et diversifiee, comprenant des jeux optimises pour Bitcoin. Le bonus de bienvenue est genereux. Le suivi est d’une fiabilite exemplaire. Les transactions sont fiables et efficaces, de temps a autre des offres plus genereuses seraient top. En bref, Betify Casino offre une experience hors du commun. D’ailleurs le site est rapide et immersif, ce qui rend chaque session plus excitante. Un avantage les tournois frequents pour l’adrenaline, offre des bonus exclusifs.
Explorer le site|
Je suis totalement conquis par Betify Casino, ca invite a l’aventure. Le choix est aussi large qu’un festival, proposant des jeux de table classiques. Il amplifie le plaisir des l’entree. Les agents repondent avec rapidite. Les paiements sont surs et efficaces, par ailleurs des recompenses en plus seraient un bonus. Pour finir, Betify Casino garantit un plaisir constant. Ajoutons aussi l’interface est intuitive et fluide, amplifie l’adrenaline du jeu. A noter le programme VIP avec des avantages uniques, propose des avantages uniques.
DГ©couvrir maintenant|
dailyvalueoutlet – Great deals and smooth browsing, perfect for everyday shopping and savings.
simplevalueplace – Easy navigation and clear visuals, great for quick and simple shopping.
Discover exquisite Austrian wines at weinverkostung wien heute and immerse yourself in Vienna’s vibrant wine culture.
Die osterreichische Hauptstadt bietet eine einzigartige Mischung aus Tradition und Moderne. Die Region ist bekannt fur ihren exzellenten Wei?wein, besonders den Grunen Veltliner. Viele Weinverkostungen finden in historischen Gewolbekellern statt.
Das milde Klima und die mineralreichen Boden begunstigen den Weinbau. Das gibt den Wiener Weinen ihren unverwechselbaren Charakter.
#### **2. Beliebte Weinregionen und Weinguter**
In Wien gibt es mehrere renommierte Weinregionen, wie den Nussberg oder den Bisamberg. Hier reifen einige der besten osterreichischen Weine heran. Familiengefuhrte Weinguter bieten oft Fuhrungen und Verkostungen an. Gaste konnen die Leidenschaft der Winzer hautnah erleben.
Ein Besuch im Weingut Wieninger oder im Mayer am Pfarrplatz lohnt sich. Sie sind bekannt fur ihre ausgezeichneten Jahrgange.
#### **3. Ablauf einer typischen Weinverkostung**
Eine klassische Wiener Weinverkostung beginnt meist mit einer Kellertour. Die Winzer erklaren gerne ihre Arbeitsschritte. Danach folgt die Verkostung unterschiedlicher Weine. Jeder Wein wird sorgfaltig prasentiert und verkostet.
Haufig werden die Weine mit lokalen Kasesorten oder Brot serviert. Diese Kombination ist ein Highlight fur Feinschmecker.
#### **4. Tipps fur unvergessliche Weinverkostungen**
Um das Beste aus einer Weinverkostung in Wien herauszuholen, sollte man vorher buchen. Fruhzeitige Reservierungen garantieren einen reibungslosen Ablauf. Zudem lohnt es sich, auf die Jahreszeiten zu achten. Die warmen Monate eignen sich perfekt fur Verkostungen im Freien.
Ein guter Tipp ist auch, ein Notizbuch mitzubringen. Viele Gaste schatzen spater die Erinnerungen an die Verkostung.
—
### **Spin-Template fur den Artikel**
#### **1. Einfuhrung in die Weinverkostung in Wien**
Jahrlich stromen Tausende von Besuchern in die Weinkeller der Stadt.
#### **2. Beliebte Weinregionen und Weinguter**
Diese Weinguter stehen fur hochste Qualitat und Handwerkskunst.
#### **3. Ablauf einer typischen Wiener Weinverkostung**
Von frischen Wei?weinen bis zu kraftigen Rotweinen ist alles dabei.
#### **4. Tipps fur unvergessliche Weinverkostungen**
Es hilft, personliche Favoriten zu dokumentieren.
—
**Hinweis:** Durch Kombination der Varianten aus den -Blocken konnen zahlreiche einzigartige Texte generiert werden, die grammatikalisch und inhaltlich korrekt sind.
modernlivingstore – Sleek design and easy navigation, makes browsing modern living items enjoyable.
uniquevaluezone – Very well-organized site, everything feels unique and easy to find.
discoveramazingfinds – Love the positive and adventurous tone, makes shopping sound exciting.
groweverymoment – Encourages focus and continuous growth, a very motivating concept overall.
newseasonfinds – Fresh, modern, and well-organized, makes exploring seasonal items enjoyable.
trendingstyleworld – Love the style and variety here, trendy yet easy to explore.
Your blog is a place I come to when I need a boost of positivity It’s like a warm hug from a friend Thank you for being that friend
findyournextgoal – Inspiring vibe overall, makes me want to plan and achieve more.
creativityneverends – Love how positive it sounds, encourages thinking big and creating freely.
simplefashioncorner – Great name, feels cozy and elegant with a touch of modern charm.
фриспины без отыгрыша без депозита
findyourpath – Great reminder that everyone’s journey is unique and worth exploring.
makeimpacteveryday – Powerful words that remind us that impact starts with small steps.
learnsomethingnewtoday – Inspiring name that encourages growth and lifelong learning effortlessly.
dreambiggeralways – Love the motivational tone, it sparks ambition and positivity instantly.
inspirechangealways – Positive and motivational, great site for inspiration and self-improvement ideas.
learnsomethingamazing – Inspiring and educational, perfect site for daily learning and ideas.
Je suis enthousiasme par Betway Casino, on ressent une ambiance de fete. Les options de jeu sont incroyablement variees, proposant des jeux de table sophistiques. Il rend le debut de l’aventure palpitant. Le support client est irreprochable. Les gains arrivent en un eclair, a l’occasion des bonus diversifies seraient un atout. En resume, Betway Casino est un choix parfait pour les joueurs. Par ailleurs le design est moderne et energique, permet une plongee totale dans le jeu. Un plus les transactions en crypto fiables, renforce le lien communautaire.
Aller sur le site web|
Discover exquisite Austrian wines at prosecco verkostung wien and immerse yourself in Vienna’s vibrant wine culture.
Die osterreichische Hauptstadt bietet eine einzigartige Mischung aus Tradition und Moderne. Die Region ist bekannt fur ihren exzellenten Wei?wein, besonders den Grunen Veltliner. Viele Weinverkostungen finden in historischen Gewolbekellern statt.
Das milde Klima und die mineralreichen Boden begunstigen den Weinbau. Das gibt den Wiener Weinen ihren unverwechselbaren Charakter.
#### **2. Beliebte Weinregionen und Weinguter**
In Wien gibt es mehrere renommierte Weinregionen, wie den Nussberg oder den Bisamberg. Die Weinguter hier setzen auf nachhaltigen Anbau. Familiengefuhrte Weinguter bieten oft Fuhrungen und Verkostungen an. Gaste konnen die Leidenschaft der Winzer hautnah erleben.
Ein Besuch im Weingut Wieninger oder im Mayer am Pfarrplatz lohnt sich. Sie sind bekannt fur ihre ausgezeichneten Jahrgange.
#### **3. Ablauf einer typischen Weinverkostung**
Eine klassische Wiener Weinverkostung beginnt meist mit einer Kellertour. Die Winzer erklaren gerne ihre Arbeitsschritte. Danach folgt die Verkostung unterschiedlicher Weine. Jeder Wein wird sorgfaltig prasentiert und verkostet.
Haufig werden die Weine mit lokalen Kasesorten oder Brot serviert. Das unterstreicht die Geschmacksnuancen der Weine.
#### **4. Tipps fur unvergessliche Weinverkostungen**
Um das Beste aus einer Weinverkostung in Wien herauszuholen, sollte man vorher buchen. Fruhzeitige Reservierungen garantieren einen reibungslosen Ablauf. Zudem lohnt es sich, auf die Jahreszeiten zu achten. Im Herbst finden oft Weinlesefeste statt.
Ein guter Tipp ist auch, ein Notizbuch mitzubringen. Es hilft, personliche Favoriten zu dokumentieren.
—
### **Spin-Template fur den Artikel**
#### **1. Einfuhrung in die Weinverkostung in Wien**
Die osterreichische Hauptstadt bietet eine einzigartige Mischung aus Tradition und Moderne.
#### **2. Beliebte Weinregionen und Weinguter**
Dabei lernt man viel uber die Herstellung und Geschichte der Weine.
#### **3. Ablauf einer typischen Wiener Weinverkostung**
Von frischen Wei?weinen bis zu kraftigen Rotweinen ist alles dabei.
#### **4. Tipps fur unvergessliche Weinverkostungen**
Viele Weinguter haben begrenzte Platze und sind schnell ausgebucht.
—
**Hinweis:** Durch Kombination der Varianten aus den -Blocken konnen zahlreiche einzigartige Texte generiert werden, die grammatikalisch und inhaltlich korrekt sind.
yourfashionoutlet – Great collection of trendy items, very smooth and stylish browsing.
Je suis fascine par Betway Casino, ca invite a plonger dans le fun. Le choix est aussi large qu’un festival, offrant des tables live interactives. Le bonus d’inscription est attrayant. Les agents repondent avec efficacite. Les gains arrivent en un eclair, par contre des offres plus genereuses seraient top. Pour finir, Betway Casino est une plateforme qui pulse. En plus la plateforme est visuellement dynamique, incite a prolonger le plaisir. Un plus les paiements en crypto rapides et surs, qui booste la participation.
DГ©couvrir le contenu|
modernlivingtrend – Stylish, modern, and smooth experience from start to finish.
smartshoppingzone – Easy to navigate and clean layout, perfect for smart shoppers.
blsp ap
I’ve been using buy legal mushroom gummies daily on account of over a month for the time being, and I’m indeed impressed during the absolute effects. They’ve helped me perceive calmer, more balanced, and less solicitous everywhere the day. My snore is deeper, I wake up refreshed, and uniform my nave has improved. The quality is famous, and I cognizant the accepted ingredients. I’ll positively preserve buying and recommending them to the whole world I be aware!
оптимизация сайта франция цена optimizaciya-i-seo-prodvizhenie-sajtov-moskva.ru .
раскрутка сайта франция http://www.optimizaciya-i-seo-prodvizhenie-sajtov-moskva-1.ru .
контекстная реклама статьи контекстная реклама статьи .
learnsomethingdaily – Clean and informative, perfect for daily learning and personal growth.
стратегия продвижения блог http://www.statyi-o-marketinge6.ru .
другие kraken зайти
theartofgrowth – Inspiring and thoughtful layout, perfect for personal growth and learning.
findyourpathnow – Motivating vibe and thoughtful layout, everything feels purposeful and neat.
bonjour I love Your Blog can not say I come here often but im liking what i c so far….
discoverandbuy – Smooth experience and well-presented products, makes online shopping effortless.
бездепозитный бонус с выводом без пополнения Бездепозитные бонусы – это привлекательные предложения от онлайн-казино и букмекерских контор, которые позволяют игрокам начать играть, не внося собственных средств. Чаще всего они предоставляются за регистрацию нового аккаунта. Это может быть небольшая сумма денег на игровой счет или определенное количество бесплатных вращений для популярных игровых автоматов.
Докладніше на сайті: https://uaeu.top/turyzm.html
читать кракен сайт
Подробиці за посиланням: https://ukrglobe.com/aktualne.html
trendforlife – Very fashionable and clean site, makes exploring trends effortless.
urbanchoicehub – Trendy urban style and clean design, makes exploring fashion easy and fun.
modernhomecorner – Love the modern designs and home decor ideas shared here daily.
бездепозитные игровые автоматы с выводом Ищете возможность испытать азарт и, возможно, сорвать куш, не вкладывая ни рубля? Бездепозитные бонусы – это именно то, что вам нужно! Это специальные предложения от казино и букмекерских контор, которые дарят вам стартовый капитал или бесплатные вращения просто за то, что вы решили присоединиться. Используйте их, чтобы изучить ассортимент игр, найти свои фавориты и, кто знает, может быть, именно этот бонус станет вашим первым шагом к крупному выигрышу. Это абсолютно безрисковый старт для всех желающих!
Смотреть здесь kraken ссылка
PureValue Store – Inspiring and interactive site for modern learners.
этот контент kra43 at
Discover exquisite Austrian wines at https://wine-tasting-wien.netlify.app/ and immerse yourself in Vienna’s vibrant wine culture.
Die osterreichische Hauptstadt bietet eine einzigartige Mischung aus Tradition und Moderne. Die Region ist bekannt fur ihren exzellenten Wei?wein, besonders den Grunen Veltliner. Viele Weinverkostungen finden in historischen Gewolbekellern statt.
Das milde Klima und die mineralreichen Boden begunstigen den Weinbau. Das gibt den Wiener Weinen ihren unverwechselbaren Charakter.
#### **2. Beliebte Weinregionen und Weinguter**
In Wien gibt es mehrere renommierte Weinregionen, wie den Nussberg oder den Bisamberg. Diese Gebiete sind fur ihre Spitzenweine international bekannt. Familiengefuhrte Weinguter bieten oft Fuhrungen und Verkostungen an. Gaste konnen die Leidenschaft der Winzer hautnah erleben.
Ein Besuch im Weingut Wieninger oder im Mayer am Pfarrplatz lohnt sich. Hier verbinden sich Tradition mit innovativen Methoden.
#### **3. Ablauf einer typischen Weinverkostung**
Eine klassische Wiener Weinverkostung beginnt meist mit einer Kellertour. Oft werden historische Anekdoten zum Weinbau geteilt. Danach folgt die Verkostung unterschiedlicher Weine. Von frischen Wei?weinen bis zu kraftigen Rotweinen ist alles dabei.
Haufig werden die Weine mit lokalen Kasesorten oder Brot serviert. Das unterstreicht die Geschmacksnuancen der Weine.
#### **4. Tipps fur unvergessliche Weinverkostungen**
Um das Beste aus einer Weinverkostung in Wien herauszuholen, sollte man vorher buchen. Fruhzeitige Reservierungen garantieren einen reibungslosen Ablauf. Zudem lohnt es sich, auf die Jahreszeiten zu achten. Im Herbst finden oft Weinlesefeste statt.
Ein guter Tipp ist auch, ein Notizbuch mitzubringen. Viele Gaste schatzen spater die Erinnerungen an die Verkostung.
—
### **Spin-Template fur den Artikel**
#### **1. Einfuhrung in die Weinverkostung in Wien**
Daher gedeihen hier besonders aromatische Rebsorten.
#### **2. Beliebte Weinregionen und Weinguter**
Hier reifen einige der besten osterreichischen Weine heran.
#### **3. Ablauf einer typischen Wiener Weinverkostung**
Die Winzer erklaren gerne ihre Arbeitsschritte.
#### **4. Tipps fur unvergessliche Weinverkostungen**
Einige Anbieter bieten auch private Verkostungen an.
—
**Hinweis:** Durch Kombination der Varianten aus den -Blocken konnen zahlreiche einzigartige Texte generiert werden, die grammatikalisch und inhaltlich korrekt sind.
findmotivationtoday – Positive and inspiring layout, really motivates and encourages action every day.
styleandchoice – Great mix of creativity, personality, and trend appeal.
simplebuyhub – This store makes online shopping effortless and enjoyable every time.
yourstylezone – Stylish, modern, and user-friendly, love the smooth browsing experience.
yourpathforward – Motivating concept, feels like a site that inspires progress and growth.
комплексное продвижение сайтов москва комплексное продвижение сайтов москва .
поисковое продвижение сайта в интернете москва поисковое продвижение сайта в интернете москва .
блог о маркетинге блог о маркетинге .
блог про продвижение сайтов блог про продвижение сайтов .
бездепозитный бонус с выводом без пополнения Не упустите шанс начать играть прямо сейчас! Зарегистрируйтесь и получите свой бездепозитный бонус – это может быть сумма на счет или бесплатные вращения. Испытайте удачу, познакомьтесь с любимыми играми и получите возможность выиграть реальные деньги, не рискуя собственными. Просто зарегистрируйтесь и заберите свой подарок!
findnewinspiration – Bright, clean, and motivating, perfect for discovering fresh ideas daily.
starttodaymoveforward – Strong, forward-thinking name full of energy and inspiration.
budgetfriendlypicks – Perfect spot for anyone who enjoys saving without compromising style.
trendywearstore – One of the best places to refresh your wardrobe this season.
discoverhiddenopportunities – Feels like a platform that promotes curiosity and growth mindset.
промокоды сегодня
growyourmindset – Love how this name promotes positivity and continuous personal growth.
Je ne me lasse pas de Betway Casino, il procure une sensation de frisson. La gamme est variee et attrayante, comprenant des jeux optimises pour Bitcoin. Il booste votre aventure des le depart. Le support est efficace et amical. Les paiements sont surs et fluides, cependant des recompenses supplementaires dynamiseraient le tout. Dans l’ensemble, Betway Casino est un immanquable pour les amateurs. En plus la navigation est simple et intuitive, apporte une energie supplementaire. A signaler les tournois reguliers pour s’amuser, offre des recompenses continues.
Explorer plus|
Смотреть здесь кракен ссылка
trendandfashionhub – Bright, trendy, and well-organized, perfect for fashion enthusiasts.
ссылка на сайт kra43.cc
Je suis enthousiaste a propos de Belgium Casino, c’est un lieu ou l’adrenaline coule a flots. La bibliotheque de jeux est captivante, proposant des jeux de cartes elegants. Avec des depots rapides et faciles. Le service client est excellent. Les transactions sont d’une fiabilite absolue, neanmoins quelques tours gratuits en plus seraient geniaux. En resume, Belgium Casino est un incontournable pour les joueurs. Ajoutons que le site est fluide et attractif, permet une plongee totale dans le jeu. Egalement genial les competitions regulieres pour plus de fun, offre des bonus constants.
https://casinobelgium366fr.com/|
Je ne me lasse pas de Gamdom Casino, il procure une sensation de frisson. Les titres proposes sont d’une richesse folle, incluant des paris sur des evenements sportifs. Le bonus de depart est top. Les agents sont toujours la pour aider. Les transactions sont fiables et efficaces, par contre des offres plus genereuses rendraient l’experience meilleure. En resume, Gamdom Casino garantit un plaisir constant. Ajoutons que le site est fluide et attractif, permet une plongee totale dans le jeu. A signaler les paiements en crypto rapides et surs, propose des privileges sur mesure.
Gamdom|
Подробнее kra cc
J’ai un faible pour Gamdom Casino, on ressent une ambiance de fete. La selection de jeux est impressionnante, offrant des experiences de casino en direct. Il propulse votre jeu des le debut. Le suivi est impeccable. Les retraits sont fluides et rapides, quelquefois plus de promotions frequentes boosteraient l’experience. En conclusion, Gamdom Casino est un endroit qui electrise. En extra la plateforme est visuellement dynamique, permet une plongee totale dans le jeu. Un atout les paiements securises en crypto, assure des transactions fiables.
DГ©couvrir maintenant|
Узнать больше https://kra43.cc
Je suis enthousiasme par Betify Casino, ca offre une experience immersive. Les options de jeu sont incroyablement variees, incluant des paris sportifs pleins de vie. Il propulse votre jeu des le debut. Le service client est excellent. Les paiements sont securises et rapides, par ailleurs plus de promotions frequentes boosteraient l’experience. En bref, Betify Casino offre une aventure memorable. De plus la navigation est fluide et facile, booste le fun du jeu. Egalement genial les nombreuses options de paris sportifs, renforce la communaute.
En savoir plus|
Je suis accro a Betify Casino, c’est une plateforme qui pulse avec energie. Les titres proposes sont d’une richesse folle, offrant des sessions live palpitantes. Avec des depots rapides et faciles. Le support est pro et accueillant. Les paiements sont surs et efficaces, occasionnellement des bonus plus frequents seraient un hit. Pour finir, Betify Casino garantit un amusement continu. En extra l’interface est fluide comme une soiree, incite a prolonger le plaisir. Un point cle les tournois frequents pour l’adrenaline, garantit des paiements securises.
Continuer ici|
Je suis fascine par Belgium Casino, il cree une experience captivante. La bibliotheque est pleine de surprises, offrant des sessions live palpitantes. Il offre un demarrage en fanfare. Disponible 24/7 pour toute question. Les paiements sont securises et rapides, en revanche des offres plus genereuses seraient top. Pour finir, Belgium Casino assure un divertissement non-stop. De surcroit la plateforme est visuellement dynamique, ce qui rend chaque session plus excitante. Particulierement cool les paiements en crypto rapides et surs, cree une communaute soudee.
Aller à l’intérieur|
findyourinspirationtoday – Inspiring visuals and smooth design, makes finding new ideas enjoyable and simple.
посмотреть в этом разделе kra45.at
Je suis accro a Belgium Casino, ca invite a plonger dans le fun. On trouve une gamme de jeux eblouissante, proposant des jeux de table classiques. 100% jusqu’a 500 € + tours gratuits. Le suivi est d’une precision remarquable. Les paiements sont surs et efficaces, occasionnellement des offres plus genereuses rendraient l’experience meilleure. Dans l’ensemble, Belgium Casino est un endroit qui electrise. Par ailleurs l’interface est lisse et agreable, permet une plongee totale dans le jeu. A signaler le programme VIP avec des recompenses exclusives, qui booste la participation.
Visiter maintenant|
Je suis accro a Gamdom Casino, c’est une plateforme qui deborde de dynamisme. La selection est riche et diversifiee, comprenant des jeux crypto-friendly. 100% jusqu’a 500 € plus des tours gratuits. Le service d’assistance est au point. Les retraits sont simples et rapides, par ailleurs quelques tours gratuits en plus seraient geniaux. Au final, Gamdom Casino garantit un plaisir constant. En plus le design est moderne et attrayant, ajoute une vibe electrisante. Un avantage notable les competitions regulieres pour plus de fun, offre des bonus constants.
Lire la suite|
Je suis accro a Gamdom Casino, c’est une plateforme qui deborde de dynamisme. Il y a une abondance de jeux excitants, avec des machines a sous visuellement superbes. Il amplifie le plaisir des l’entree. Le suivi est toujours au top. Les gains arrivent en un eclair, toutefois des bonus varies rendraient le tout plus fun. Pour conclure, Gamdom Casino merite un detour palpitant. En extra la plateforme est visuellement dynamique, ce qui rend chaque session plus excitante. Egalement excellent les evenements communautaires engageants, offre des recompenses regulieres.
Aller au site|
Je suis epate par Betify Casino, ca donne une vibe electrisante. Le choix est aussi large qu’un festival, offrant des sessions live palpitantes. Avec des transactions rapides. Disponible a toute heure via chat ou email. Les gains arrivent en un eclair, rarement quelques free spins en plus seraient bienvenus. En fin de compte, Betify Casino assure un fun constant. En plus le design est style et moderne, amplifie l’adrenaline du jeu. Particulierement attrayant le programme VIP avec des niveaux exclusifs, propose des avantages uniques.
VГ©rifier le site|
J’ai un faible pour Belgium Casino, il propose une aventure palpitante. Le catalogue est un tresor de divertissements, avec des slots aux designs captivants. Avec des transactions rapides. Les agents sont rapides et pros. Le processus est transparent et rapide, cependant des offres plus genereuses rendraient l’experience meilleure. En somme, Belgium Casino offre une aventure memorable. Par ailleurs le site est rapide et immersif, facilite une immersion totale. Particulierement interessant les options de paris sportifs variees, garantit des paiements rapides.
Explorer plus|
Протестированная кракен рабочая ссылка httpskra41 ведет на оригинальную площадку без фишинговых редиректов безопасно.
J’adore le dynamisme de Betify Casino, on y trouve une vibe envoutante. Le catalogue est un paradis pour les joueurs, offrant des sessions live immersives. 100% jusqu’a 500 € plus des tours gratuits. Le service est disponible 24/7. Les gains arrivent sans delai, neanmoins quelques tours gratuits supplementaires seraient cool. En bref, Betify Casino est un immanquable pour les amateurs. Ajoutons aussi l’interface est fluide comme une soiree, ce qui rend chaque moment plus vibrant. Particulierement cool les options de paris sportifs variees, offre des recompenses regulieres.
Entrer maintenant|
веб-сайт Kra43 cc
Кибербезопасность — ключевой фактор стабильности kraken сайт kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
J’adore l’energie de Betify Casino, ca pulse comme une soiree animee. Le choix est aussi large qu’un festival, comprenant des jeux optimises pour Bitcoin. Le bonus d’inscription est attrayant. Le support est fiable et reactif. Les retraits sont fluides et rapides, neanmoins quelques free spins en plus seraient bienvenus. Globalement, Betify Casino offre une aventure memorable. De plus l’interface est simple et engageante, donne envie de continuer l’aventure. Un point fort les evenements communautaires dynamiques, propose des privileges personnalises.
AccГ©der maintenant|
Регулярное обновление позволяет найти свежую кракен даркнет ссылка на агрегаторах darknet маркетплейсов России.
simplefashioncorner – Clean, trendy, and easy-to-browse fashion options all in one place.
Je suis enthousiasme par Betway Casino, ca donne une vibe electrisante. Les options de jeu sont infinies, comprenant des jeux optimises pour Bitcoin. 100% jusqu’a 500 € avec des spins gratuits. Disponible 24/7 pour toute question. Le processus est simple et transparent, occasionnellement des bonus plus frequents seraient un hit. Pour finir, Betway Casino vaut une exploration vibrante. De surcroit la plateforme est visuellement captivante, ajoute une vibe electrisante. Un bonus le programme VIP avec des avantages uniques, propose des avantages uniques.
Essayer|
купить диплом гознак отзывы купить диплом гознак отзывы .
Je suis emerveille par Betway Casino, il cree un monde de sensations fortes. La selection de jeux est impressionnante, proposant des jeux de cartes elegants. Il amplifie le plaisir des l’entree. Le support client est irreprochable. Les paiements sont surs et fluides, cependant des recompenses en plus seraient un bonus. Au final, Betway Casino offre une aventure memorable. D’ailleurs l’interface est lisse et agreable, ce qui rend chaque session plus palpitante. Particulierement fun les transactions crypto ultra-securisees, offre des recompenses continues.
http://www.betwaycasino365fr.com|
бесплатные вращения без депозита Представьте: вы получаете реальные деньги или фриспины (бесплатные вращения) просто за регистрацию, без необходимости вносить свои собственные средства. Это отличная возможность познакомиться с игрой, протестировать новые слоты или стратегии, и даже выиграть реальные деньги, не потратив ни копейки. Идеально для тех, кто только начинает свой путь в мире азартных игр или хочет попробовать что-то новое без финансовых обязательств.
shopandsaveonline – Great deals and simple layout, makes online shopping quick and easy.
купить диплом мгри рггру купить диплом мгри рггру .
зайти на сайт кракен клир
где купить недорогой диплом http://www.r-diploma26.ru/ .
I am very happy to look your post. Thanks a lot and i am taking a look ahead to touch you.
кто где купил диплом форум кто где купил диплом форум .
промокоды на сегодня
Машина для резки труб Орбита-Р ручная Затворы стальные – дисковые затворы, изготовленные из стали. Отличаются высокой прочностью и устойчивостью к высоким температурам и давлениям, что делает их подходящими для использования в энергетике, химической промышленности и других отраслях, где требуются надежные решения.
modernhomecorner – Love the modern designs and home decor ideas shared here daily.
бездепозитный бонус фриспины за регистрацию Ищете возможность испытать азарт и, возможно, сорвать куш, не вкладывая ни рубля? Бездепозитные бонусы – это именно то, что вам нужно! Это специальные предложения от казино и букмекерских контор, которые дарят вам стартовый капитал или бесплатные вращения просто за то, что вы решили присоединиться. Используйте их, чтобы изучить ассортимент игр, найти свои фавориты и, кто знает, может быть, именно этот бонус станет вашим первым шагом к крупному выигрышу. Это абсолютно безрисковый старт для всех желающих!
ссылка на сайт кракен ссылка
узнать больше https://kra43.cc
поисковое продвижение сайта в интернете москва поисковое продвижение сайта в интернете москва .
поисковое продвижение москва профессиональное продвижение сайтов optimizaciya-i-seo-prodvizhenie-sajtov-moskva.ru .
блог о рекламе и аналитике http://www.statyi-o-marketinge7.ru .
блог про продвижение сайтов блог про продвижение сайтов .
Актуальная kraken ссылка kra41 cc обеспечивает стабильный доступ к платформе через безопасное соединение.
besttrendstore – Love the clean design and trendy collections, very appealing overall.
Перейти на сайт кракен ссылка
besttrendstore – Trendy and exciting store with fresh fashion and lifestyle products.
I really love this article.
бездепозитный бонус с отыгрышем за регистрацию Ищете возможность испытать азарт и, возможно, сорвать куш, не вкладывая ни рубля? Бездепозитные бонусы – это именно то, что вам нужно! Это специальные предложения от казино и букмекерских контор, которые дарят вам стартовый капитал или бесплатные вращения просто за то, что вы решили присоединиться. Используйте их, чтобы изучить ассортимент игр, найти свои фавориты и, кто знает, может быть, именно этот бонус станет вашим первым шагом к крупному выигрышу. Это абсолютно безрисковый старт для всех желающих!
нажмите, чтобы подробнее кракен вход
Маты футеровочные для железобетонных утяжелителей Профильная труба – это труба с некруглым сечением, наиболее распространенные формы – квадрат и прямоугольник. Профильные трубы обладают высокой прочностью на изгиб, что делает их идеальным материалом для строительства каркасных конструкций, ограждений, мебели и других изделий, где важна надежность и долговечность.
yourfashionoutlet – Love the stylish collection here, everything feels trendy and well-priced.
Bitcoin Profit Way se differencie comme une plateforme de placement crypto de pointe, qui exploite la puissance de l’intelligence artificielle pour proposer a ses membres des avantages concurrentiels decisifs.
Son IA analyse les marches en temps reel, identifie les opportunites et met en ?uvre des strategies complexes avec une precision et une vitesse inaccessibles aux traders humains, optimisant ainsi les potentiels de rendement.
startfreshjourney – Uplifting and positive vibe, perfect for inspiration and fresh beginnings.
thinkactachieve – Really inspiring message, perfect for anyone focused on self-improvement.
Капча из восьми букв защищает кракен даркнет вход от автоматических атак и брутфорса паролей.
connectwithpeople – Such a positive name, really emphasizes community and human connection.
thebestdeal – Always great to find a site focused on value and daily savings.
shopwithstyle – Love the elegant touch and fashion-forward vibe of this store.
Discover exquisite Austrian wines at https://wine-tasting-wien.netlify.app/ and immerse yourself in Vienna’s vibrant wine culture.
Wien begeistert mit seiner langen Weintradition und zeitgenossischen Angeboten. Die Region ist bekannt fur ihren exzellenten Wei?wein, besonders den Grunen Veltliner. Die Weinkeller Wiens locken mit ihrem authentischen Charme und kostlichen Tropfen.
Das milde Klima und die mineralreichen Boden begunstigen den Weinbau. Das gibt den Wiener Weinen ihren unverwechselbaren Charakter.
#### **2. Beliebte Weinregionen und Weinguter**
In Wien gibt es mehrere renommierte Weinregionen, wie den Nussberg oder den Bisamberg. Die Weinguter hier setzen auf nachhaltigen Anbau. Familiengefuhrte Weinguter bieten oft Fuhrungen und Verkostungen an. Gaste konnen die Leidenschaft der Winzer hautnah erleben.
Ein Besuch im Weingut Wieninger oder im Mayer am Pfarrplatz lohnt sich. Diese Weinguter stehen fur hochste Qualitat und Handwerkskunft.
#### **3. Ablauf einer typischen Weinverkostung**
Eine klassische Wiener Weinverkostung beginnt meist mit einer Kellertour. Die Winzer erklaren gerne ihre Arbeitsschritte. Danach folgt die Verkostung unterschiedlicher Weine. Von frischen Wei?weinen bis zu kraftigen Rotweinen ist alles dabei.
Haufig werden die Weine mit lokalen Kasesorten oder Brot serviert. Das unterstreicht die Geschmacksnuancen der Weine.
#### **4. Tipps fur unvergessliche Weinverkostungen**
Um das Beste aus einer Weinverkostung in Wien herauszuholen, sollte man vorher buchen. Viele Weinguter haben begrenzte Platze und sind schnell ausgebucht. Zudem lohnt es sich, auf die Jahreszeiten zu achten. Im Herbst finden oft Weinlesefeste statt.
Ein guter Tipp ist auch, ein Notizbuch mitzubringen. Viele Gaste schatzen spater die Erinnerungen an die Verkostung.
—
### **Spin-Template fur den Artikel**
#### **1. Einfuhrung in die Weinverkostung in Wien**
In Wien kann man die Vielfalt osterreichischer Weine auf besondere Weise entdecken.
#### **2. Beliebte Weinregionen und Weinguter**
Sie sind bekannt fur ihre ausgezeichneten Jahrgange.
#### **3. Ablauf einer typischen Wiener Weinverkostung**
Es ist die perfekte Erganzung zum sensorischen Erlebnis.
#### **4. Tipps fur unvergessliche Weinverkostungen**
Einige Anbieter bieten auch private Verkostungen an.
—
**Hinweis:** Durch Kombination der Varianten aus den -Blocken konnen zahlreiche einzigartige Texte generiert werden, die grammatikalisch und inhaltlich korrekt sind.
globalfashionzone – Amazing designs and global trends, perfect for fashion enthusiasts.
staycuriousdaily – Inspiring concept that encourages exploration and daily growth.
groweverymoment – The message is simple yet powerful, love the growth mindset theme.
believeinyourideas – Motivating and clean design, makes exploring ideas enjoyable and simple.
theartofgrowth – Inspiring name that perfectly fits a mindset of learning and progress.
findyourbalance – A truly grounding idea that promotes calm and thoughtful living.
бездепозитный бонус фриспины за регистрацию Ищете возможность испытать азарт и, возможно, сорвать куш, не вкладывая ни рубля? Бездепозитные бонусы – это именно то, что вам нужно! Это специальные предложения от казино и букмекерских контор, которые дарят вам стартовый капитал или бесплатные вращения просто за то, что вы решили присоединиться. Используйте их, чтобы изучить ассортимент игр, найти свои фавориты и, кто знает, может быть, именно этот бонус станет вашим первым шагом к крупному выигрышу. Это абсолютно безрисковый старт для всех желающих!
каталог чижик магазин Чижик магазин каталог – это ваш гид по выгодным покупкам. Каталог помогает сориентироваться в ассортименте и выбрать наиболее интересные предложения.
бездепозитные бонусы за регистрацию с выводом Бездепозитные бонусы в онлайн-казино – это как бесплатный билет в мир азартных игр. Они позволяют вам попробовать игры, оценить платформу и даже выиграть реальные деньги, не рискуя собственными средствами. Звучит слишком хорошо, чтобы быть правдой? Давайте разберемся, что это такое, как они работают и стоит ли ими пользоваться.
услуги по согласованию перепланировки услуги по согласованию перепланировки .
регистрация перепланировки нежилого помещения регистрация перепланировки нежилого помещения .
777 surewin casino http://www.surewin-online.com .
icebet best bonus casino http://www.icebet-online.com .
бездепозитные игровые автоматы Бездепозитные бонусы в онлайн-казино – это как бесплатный билет в мир азартных игр. Они позволяют вам попробовать игры, оценить платформу и даже выиграть реальные деньги, не рискуя собственными средствами. Звучит слишком хорошо, чтобы быть правдой? Давайте разберемся, что это такое, как они работают и стоит ли ими пользоваться.
uniquevaluezone – Offers cool finds at great prices, really worth visiting.
globalstyleoutlet – Amazing range of international fashion, really fun to browse.
бездепозитные бонусы за регистрацию с выводом Пусть это звучит ново и заманчиво, но настоящая грамотность игрока начинается с понимания того, что скрывается за фразой бездепозитные бонусы в казино. Это не просто бесплатные вращения или небольшие кредиты на счёт; за каждой щедрой акцией стоят правила, отыгрыши и ограничения, которые могут либо увеличить ваши шансы на победу, либо превратить удачный первый визит в долгую битву с условиями. В этой статье мы разберёмся, как такие бонусы работают на практике, какие бывают, какие подводные камни ждать и как максимально эффективно извлекать пользу без риска оказаться в ловушке банальных условий.
newtrendmarket – Love the fresh and modern vibe, full of current fashion finds.
Assume you are doing good linking to position you on the first pages of search engines.
discoverhiddenopportunities – Inspiring name that encourages exploring new ideas and growth.
dailyshoppingzone – Love how convenient this site is for everyday shopping needs.
виза во Францию для россиян Виза в Китай для россиян – это обязательный документ, позволяющий гражданам РФ въезжать на территорию Китая с различными целями: туризм, бизнес, учеба и т.д. Процедура оформления визы имеет свои особенности и нюансы.
Je suis emerveille par Betway Casino, c’est une plateforme qui pulse avec energie. Le choix de jeux est tout simplement enorme, incluant des options de paris sportifs dynamiques. Avec des depots rapides et faciles. Le support client est irreprochable. Les retraits sont ultra-rapides, cependant quelques spins gratuits en plus seraient top. Au final, Betway Casino garantit un amusement continu. Notons aussi le site est rapide et engageant, facilite une experience immersive. Un point fort les evenements communautaires engageants, assure des transactions fiables.
DГ©marrer maintenant|
Je suis completement seduit par Betway Casino, ca pulse comme une soiree animee. Les options sont aussi vastes qu’un horizon, proposant des jeux de table classiques. Il amplifie le plaisir des l’entree. Le suivi est toujours au top. Le processus est simple et transparent, malgre tout des bonus plus varies seraient un plus. Au final, Betway Casino est une plateforme qui fait vibrer. A mentionner l’interface est intuitive et fluide, ajoute une vibe electrisante. A signaler les options variees pour les paris sportifs, offre des recompenses continues.
Commencer Г explorer|
trendycollectionhub – Great place for discovering stylish collections and creative designs.
dailyshoppingzone – Love how convenient this site is for everyday shopping needs.
Je ne me lasse pas de Betway Casino, ca invite a l’aventure. La gamme est variee et attrayante, avec des machines a sous aux themes varies. Il donne un avantage immediat. Les agents repondent avec efficacite. Les paiements sont surs et efficaces, par moments des offres plus consequentes seraient parfaites. Pour conclure, Betway Casino est une plateforme qui pulse. De plus le site est rapide et immersif, ajoute une touche de dynamisme. Particulierement attrayant le programme VIP avec des niveaux exclusifs, offre des bonus exclusifs.
Obtenir les dГ©tails|
newtrendmarket – Fresh trends and a smooth shopping experience, really well put together.
Je suis epate par Betway Casino, c’est une plateforme qui deborde de dynamisme. Il y a un eventail de titres captivants, proposant des jeux de casino traditionnels. Il offre un demarrage en fanfare. Le service client est de qualite. Les transactions sont d’une fiabilite absolue, mais des bonus diversifies seraient un atout. En resume, Betway Casino assure un fun constant. Pour couronner le tout le design est moderne et energique, permet une plongee totale dans le jeu. Un plus les options de paris sportifs diversifiees, propose des privileges personnalises.
Lire plus|
Это самый надежный kraken даркнет ресурс. Резервный адрес на случай, если кракен официальный сайт заблокирован: https://rsa-mta.ru/threads/10968/
Переходите без опасений.
J’ai une passion debordante pour Gamdom Casino, on y trouve une energie contagieuse. La selection est riche et diversifiee, offrant des sessions live palpitantes. Il offre un coup de pouce allechant. Le support est rapide et professionnel. Les paiements sont surs et fluides, a l’occasion des bonus diversifies seraient un atout. En fin de compte, Gamdom Casino offre une experience hors du commun. Ajoutons que l’interface est simple et engageante, ce qui rend chaque session plus palpitante. Particulierement interessant les nombreuses options de paris sportifs, qui booste la participation.
Visiter pour plus|
бездепозитные фриспины за регистрацию с выводом без пополнения Пусть это звучит ново и заманчиво, но настоящая грамотность игрока начинается с понимания того, что скрывается за фразой бездепозитные бонусы в казино. Это не просто бесплатные вращения или небольшие кредиты на счёт; за каждой щедрой акцией стоят правила, отыгрыши и ограничения, которые могут либо увеличить ваши шансы на победу, либо превратить удачный первый визит в долгую битву с условиями. В этой статье мы разберёмся, как такие бонусы работают на практике, какие бывают, какие подводные камни ждать и как максимально эффективно извлекать пользу без риска оказаться в ловушке банальных условий.
J’adore l’energie de Betify Casino, il offre une experience dynamique. La selection de jeux est impressionnante, offrant des sessions live immersives. Avec des depots instantanes. Le support est fiable et reactif. Les retraits sont lisses comme jamais, cependant des bonus plus frequents seraient un hit. Au final, Betify Casino est une plateforme qui fait vibrer. Par ailleurs la plateforme est visuellement dynamique, ajoute une touche de dynamisme. Egalement top les tournois frequents pour l’adrenaline, cree une communaute vibrante.
Aller sur le web|
J’adore la vibe de Betify Casino, il offre une experience dynamique. La variete des jeux est epoustouflante, offrant des experiences de casino en direct. Le bonus de depart est top. Le support est fiable et reactif. Le processus est fluide et intuitif, rarement plus de promotions variees ajouteraient du fun. En resume, Betify Casino offre une experience inoubliable. Par ailleurs le site est rapide et style, incite a rester plus longtemps. A souligner les nombreuses options de paris sportifs, propose des avantages sur mesure.
Obtenir plus|
Je suis fascine par Belgium Casino, ca transporte dans un univers de plaisirs. La bibliotheque de jeux est captivante, incluant des paris sur des evenements sportifs. 100% jusqu’a 500 € + tours gratuits. Le suivi est d’une precision remarquable. Le processus est fluide et intuitif, a l’occasion des recompenses additionnelles seraient ideales. En fin de compte, Belgium Casino offre une aventure inoubliable. D’ailleurs le site est fluide et attractif, incite a prolonger le plaisir. Egalement genial les paiements en crypto rapides et surs, renforce le lien communautaire.
Cliquer pour voir|
Je suis enthousiaste a propos de Gamdom Casino, on y trouve une energie contagieuse. Le catalogue est un paradis pour les joueurs, comprenant des jeux optimises pour Bitcoin. Il propulse votre jeu des le debut. Disponible a toute heure via chat ou email. Les paiements sont securises et rapides, en revanche quelques free spins en plus seraient bienvenus. En fin de compte, Gamdom Casino assure un fun constant. Ajoutons aussi la navigation est intuitive et lisse, booste l’excitation du jeu. Egalement super les nombreuses options de paris sportifs, cree une communaute soudee.
Aller en ligne|
J’adore la vibe de Belgium Casino, ca transporte dans un univers de plaisirs. Le catalogue de titres est vaste, incluant des paris sur des evenements sportifs. 100% jusqu’a 500 € avec des free spins. Le suivi est toujours au top. Les transactions sont d’une fiabilite absolue, cependant plus de promotions frequentes boosteraient l’experience. En bref, Belgium Casino est un lieu de fun absolu. A signaler la plateforme est visuellement vibrante, facilite une experience immersive. Egalement super les evenements communautaires vibrants, offre des recompenses continues.
Trouver les dГ©tails|
J’adore la vibe de Gamdom Casino, il cree un monde de sensations fortes. Les jeux proposes sont d’une diversite folle, comprenant des jeux crypto-friendly. Il propulse votre jeu des le debut. Disponible a toute heure via chat ou email. Les transactions sont toujours fiables, quelquefois quelques spins gratuits en plus seraient top. Pour conclure, Gamdom Casino garantit un amusement continu. Notons aussi l’interface est lisse et agreable, apporte une energie supplementaire. Particulierement cool les evenements communautaires dynamiques, renforce la communaute.
Explorer davantage|
Je suis totalement conquis par Betify Casino, on y trouve une energie contagieuse. Les titres proposes sont d’une richesse folle, offrant des experiences de casino en direct. Il booste votre aventure des le depart. Les agents sont toujours la pour aider. Le processus est transparent et rapide, rarement des recompenses supplementaires seraient parfaites. En somme, Betify Casino offre une experience hors du commun. Pour ajouter le design est moderne et attrayant, incite a prolonger le plaisir. Un avantage notable le programme VIP avec des privileges speciaux, assure des transactions fiables.
Aller sur le site web|
Je suis accro a Belgium Casino, c’est un lieu ou l’adrenaline coule a flots. La variete des jeux est epoustouflante, comprenant des titres adaptes aux cryptomonnaies. 100% jusqu’a 500 € avec des spins gratuits. Le support client est irreprochable. Les transactions sont d’une fiabilite absolue, quelquefois des bonus plus frequents seraient un hit. Dans l’ensemble, Belgium Casino garantit un plaisir constant. A mentionner le site est rapide et engageant, ce qui rend chaque session plus palpitante. Egalement excellent les options variees pour les paris sportifs, renforce la communaute.
AccГ©der Г la page|
simplebuyhub – Super easy to navigate site with plenty of affordable options.
J’adore le dynamisme de Belgium Casino, ca transporte dans un univers de plaisirs. La bibliotheque est pleine de surprises, comprenant des jeux crypto-friendly. Il amplifie le plaisir des l’entree. Le service client est de qualite. Les gains sont verses sans attendre, par ailleurs plus de promos regulieres dynamiseraient le jeu. En fin de compte, Belgium Casino est un endroit qui electrise. Pour ajouter le design est moderne et energique, permet une plongee totale dans le jeu. Un avantage les evenements communautaires pleins d’energie, propose des avantages sur mesure.
Approfondir|
Je suis totalement conquis par Betify Casino, ca donne une vibe electrisante. Les options de jeu sont incroyablement variees, offrant des sessions live palpitantes. Il propulse votre jeu des le debut. Le suivi est impeccable. Les transactions sont toujours securisees, malgre tout plus de promos regulieres dynamiseraient le jeu. Pour finir, Betify Casino offre une experience inoubliable. De surcroit le site est rapide et style, ajoute une vibe electrisante. Un avantage notable les evenements communautaires vibrants, propose des avantages uniques.
VГ©rifier le site|
urbanchoicehub – Offers an excellent mix of modern essentials and stylish finds.
bestdailyoffers – Perfect site for anyone who enjoys finding value and discounts.
Je suis bluffe par Betify Casino, on y trouve une vibe envoutante. La selection de jeux est impressionnante, incluant des options de paris sportifs dynamiques. Avec des transactions rapides. Disponible 24/7 pour toute question. Les transactions sont toujours securisees, de temps a autre des recompenses en plus seraient un bonus. Globalement, Betify Casino garantit un plaisir constant. Notons aussi le design est style et moderne, incite a rester plus longtemps. Particulierement interessant les options de paris sportifs variees, propose des avantages sur mesure.
Plongez-y|
yourvisionawaits – Inspiring name that motivates people to dream and take action.
Great blog right here! You seem to put a significant amount of material on the site rather quickly.
Это самый надежный kraken даркнет ресурс. Резервный адрес на случай, если кракен официальный сайт заблокирован: КРАКЕН
Использую ежедневно.
trendforlife – Love the concept; a perfect spot for true fashion enthusiasts.
Проверенный кракен автобус — вот здесь:
kraken зекрало
Работает на сегодня.
everydaystylemarket – Stylish, minimal, and functional — just what I was looking for.
discoveramazingfinds – Great concept for curious shoppers and deal hunters.
creativechoiceoutlet – Love the mix of modern and creative products featured here.
exploreinnovativeideas – Great energy here, I always leave with fresh perspectives.
Sangiran adalah situs arkeologi di Jawa, Indonesia. Daerah terdiri dari
sekitar 56 km² (7 km x 8 km). Lokasi ini terletak di Jawa Tengah, sekitar 15 kilometer sebelah utara Surakarta di lembah Sungai Bengawan Solo.
Secara administratif, kawasan Sangiran terbagi antara 2 kabupaten: Kabupaten Sragen (Kecamatan Gemolong,
Kecamatan Kalijambe, dan Plupuh) dan Kabupaten Karanganyar (Kecamatan Gondangrejo).
Fitur penting dari situs ini adalah geologi daerah.
Awalnya kubah terbentuk jutaan tahun yang lalu melalui kenaikan tektonik.
Kubah itu kemudian terkikis yang mengekspos isi dalam kubah yang kaya akan catatan arkeologi.
1883: Situs sangiran pertama kali ditemukan oleh P.E.C schemulling.
Ketika aktif melakukan eksplorasi pada akhir abad ke-19, Eugene Dubois pernah
melakukan penelitian di sini, namun tidak terlalu intensif karena kemudian ia memusatkan aktivitas di kawasan Trinil,
Ngawi. 1934: Ahli antropologi Gustav Heinrich Ralph von Koenigswald memulai penelitian di area
tersebut, setelah mencermati laporan-laporan berbagai penemuan balung
buta (“tulang buta/raksasa”) oleh warga dan diperdagangkan. Saat itu perdagangan fosil mulai ramai akibat penemuan tengkorak dan tulang paha Pithecanthropus erectus (“Manusia Jawa”) oleh
Eugene Dubois di Trinil, Ngawi, tahun 1891. Trinil sendiri juga terletak di lembah Bengawan Solo,
kira-kira 40 km timur Sangiran. Dengan dibantu tokoh
setempat, setiap hari von Koenigswald meminta penduduk untuk mencari balung buta, yang kemudian ia bayar.
Pada tahun-tahun berikutnya, hasil penggalian menemukan berbagai fosil
erectus lainnya. Ada sekitar 60 lebih fosil H. erectus atau hominid lainnya
dengan variasi yang besar, termasuk seri Meganthropus palaeojavanicus,
telah ditemukan di situs tersebut dan kawasan sekitarnya.
Selain manusia purba, ditemukan pula berbagai fosil tulang-belulang hewan-hewan bertulang belakang (Vertebrata),
seperti buaya (kelompok gavial dan Crocodilus), Hippopotamus (kuda
nil), berbagai rusa, harimau purba, dan gajah
purba (stegodon dan gajah modern). 1977: Pemerintah Indonesia ditunjuk seluas 56
km2 di sekitar Sangiran sebagai Daerah Cagar Budaya. 1988:
Sebuah situs museum dan konservasi laboratorium lokal sederhana didirikan di Sangiran.
buildyourpotential – Great reminder that growth starts with small daily improvements.
urbanfashioncorner – Trendy, bold, and full of energy — perfect urban fashion vibe.
smartshoppingzone – Perfect for budget-conscious shoppers who still want quality products.
learnsomethingamazing – Encouraging and creative name that promotes daily learning and discovery.
бонусы казино на реальные деньги без депозита
фриспины без отыгрыша за регистрацию с выводом
brightfashionfinds – Such vibrant styles here, everything feels bold and fresh.
freshdealsworld – Great site for fresh offers and exciting online shopping deals.
бонусы казино на реальные деньги без депозита
findbestdeals – Love how easy it is to browse and spot the top deals.
Хотите быстро kraken купить клад? Этот способ для вас. Если основное зеркало не открылось — заходи через запасной линк: KRAKEN
Проверял — всё ок.
startfreshjourney – Motivating message, perfect for anyone ready for a new beginning.
Je suis completement seduit par Betway Casino, on y trouve une energie contagieuse. On trouve une profusion de jeux palpitants, comprenant des jeux crypto-friendly. Le bonus de depart est top. Le support est rapide et professionnel. Les gains sont transferes rapidement, rarement des offres plus importantes seraient super. Dans l’ensemble, Betway Casino est un choix parfait pour les joueurs. De surcroit l’interface est intuitive et fluide, ce qui rend chaque partie plus fun. Particulierement cool les options de paris sportifs variees, offre des bonus constants.
Voir la page|
Je suis totalement conquis par Betway Casino, ca transporte dans un univers de plaisirs. La bibliotheque de jeux est captivante, avec des machines a sous aux themes varies. Il rend le debut de l’aventure palpitant. Le support est rapide et professionnel. Le processus est fluide et intuitif, mais des recompenses supplementaires seraient parfaites. Dans l’ensemble, Betway Casino garantit un amusement continu. Pour ajouter la navigation est fluide et facile, apporte une touche d’excitation. A souligner les options variees pour les paris sportifs, qui booste la participation.
Tout apprendre|
learnandshine – Inspiring content that motivates me to keep learning every day.
dailydealsplace – Great place for deals, always something new and exciting to find.
Это самый надежный kraken даркнет ресурс. Резервный адрес на случай, если кракен официальный сайт заблокирован: кракен сайт
Использую ежедневно.
uniquegiftideas – Excellent variety of creative gifts, ideal for any special occasion.
fashionmarketplace – Excellent variety of styles, feels like a hub for fashion lovers.
Хотите быстро kraken купить клад? Этот способ для вас. Если основное зеркало не открылось — заходи через запасной линк: кракен автобус
Удобно, быстро, безопасно.
бесплатные вращения без депозита
discoverandbuy – The store layout feels intuitive, everything’s easy to explore and choose.
inspireeverymoment – Motivating platform that encourages positivity every single day.
продвижение телеграм Создание многослойных прокладок и применение специализированных технологий для мощного роста в поисковой выдаче Google и Yandex.
findhappinessdaily – Uplifting messages and helpful tips that brighten my day instantly.
фриспины без отыгрыша без депозита
simplebuyoutlet – Smooth shopping experience, great deals and very clean design.
purechoicehub – Clean design and high-quality items, really impressed with the layout.
findnewinspiration – I like how this page mixes creativity with practical motivation.
dreambiggeralways – Such a motivating vibe, always leaves me feeling optimistic and ready.
stayfocusedandgrow – Inspiring posts and a clean design, perfect for morning motivation.
learnandimprove – Clean layout, inspiring content, and useful advice for everyday improvement.
starttodaymoveforward – Positive and inspiring, encourages daily progress and self-growth.
I just couldn’t leave your website before suggesting that I really enjoyed the usual information an individual supply on your visitors? Is gonna be back often in order to investigate cross-check new posts
фриспины без отыгрыша за регистрацию с выводом
(10 euros gratis apuestas|10 mejores casas de apuestas|10 trucos para ganar apuestas|15 euros gratis marca apuestas|1×2 apuestas|1×2 apuestas deportivas|1×2 apuestas que significa|1×2
en apuestas|1×2 en apuestas que significa|1×2 que
significa en apuestas|5 euros gratis apuestas|9 apuestas que siempre ganaras|a partir de cuanto
se declara apuestas|actividades de juegos de azar y apuestas|ad apuestas deportivas|aleksandre topuria ufc apuestas|algoritmo para ganar apuestas deportivas|america apuestas|análisis nba apuestas|aplicacion android apuestas
deportivas|aplicacion apuestas deportivas|aplicacion apuestas deportivas android|aplicación de
apuestas online|aplicacion para hacer apuestas|aplicacion para hacer apuestas de futbol|aplicación para hacer apuestas de fútbol|aplicaciones apuestas deportivas
android|aplicaciones apuestas deportivas gratis|aplicaciones de apuestas android|aplicaciones de apuestas de fútbol|aplicaciones de apuestas deportivas|aplicaciones de apuestas deportivas peru|aplicaciones de apuestas deportivas perú|aplicaciones de apuestas en colombia|aplicaciones
de apuestas gratis|aplicaciones de apuestas online|aplicaciones de apuestas seguras|aplicaciones
de apuestas sin dinero|aplicaciones para hacer apuestas|apostar seguro apuestas deportivas|app android apuestas deportivas|app apuestas|app apuestas android|app apuestas de futbol|app apuestas deportivas|app
apuestas deportivas android|app apuestas deportivas argentina|app apuestas
deportivas colombia|app apuestas deportivas ecuador|app apuestas
deportivas españa|app apuestas deportivas gratis|app apuestas entre amigos|app apuestas futbol|app apuestas gratis|app apuestas sin dinero|app casa de apuestas|app casas de apuestas|app control apuestas|app de
apuestas|app de apuestas android|app de apuestas casino|app de apuestas colombia|app de apuestas con bono de bienvenida|app de apuestas de futbol|app de apuestas deportivas|app de apuestas
deportivas android|app de apuestas deportivas argentina|app de apuestas deportivas colombia|app
de apuestas deportivas en españa|app de apuestas deportivas
peru|app de apuestas deportivas perú|app de apuestas deportivas sin dinero|app de apuestas
ecuador|app de apuestas en colombia|app de apuestas en españa|app de apuestas en venezuela|app de
apuestas futbol|app de apuestas gratis|app de apuestas
online|app de apuestas para android|app de apuestas para ganar dinero|app
de apuestas peru|app de apuestas reales|app de casas de apuestas|app marca apuestas android|app moviles de apuestas|app para apuestas|app para apuestas de futbol|app para apuestas deportivas|app para apuestas deportivas en español|app para ganar apuestas deportivas|app para hacer apuestas|app para hacer apuestas deportivas|app para hacer apuestas entre amigos|app para llevar control de apuestas|app pronosticos apuestas deportivas|app versus apuestas|apps apuestas
mundial|apps de apuestas|apps de apuestas con bono de
bienvenida|apps de apuestas de futbol|apps de apuestas deportivas peru|apps de apuestas mexico|apps para apuestas|aprender
a hacer apuestas deportivas|aprender hacer apuestas deportivas|apuesta del dia
apuestas deportivas|apuestas 10 euros gratis|apuestas
100 seguras|apuestas 1×2|apuestas 1X2|apuestas 2 division|apuestas 3 division|apuestas a caballos|apuestas a carreras de caballos|apuestas
a colombia|apuestas a corners|apuestas a ganar|apuestas a jugadores nba|apuestas a la
baja|apuestas a la nfl|apuestas al barcelona|apuestas al dia|apuestas al empate|apuestas al mundial|apuestas al tenis wta|apuestas alaves barcelona|apuestas alcaraz hoy|apuestas alemania españa|apuestas alonso
campeon del mundo|apuestas altas y bajas|apuestas altas y bajas nfl|apuestas
ambos equipos marcan|apuestas america|apuestas android|apuestas anillo nba|apuestas antes del mundial|apuestas anticipadas|apuestas anticipadas nba|apuestas apps|apuestas arabia argentina|apuestas argentina|apuestas argentina campeon del mundo|apuestas argentina canada|apuestas argentina colombia|apuestas argentina croacia|apuestas argentina españa|apuestas argentina francia|apuestas argentina francia cuanto paga|apuestas argentina francia mundial|apuestas
argentina gana el mundial|apuestas argentina gana mundial|apuestas argentina holanda|apuestas argentina mexico|apuestas argentina méxico|apuestas argentina mundial|apuestas argentina online|apuestas
argentina paises bajos|apuestas argentina polonia|apuestas argentina uruguay|apuestas argentina vs australia|apuestas argentina vs colombia|apuestas argentina
vs francia|apuestas argentina vs peru|apuestas argentinas|apuestas arsenal real madrid|apuestas ascenso a primera division|apuestas ascenso a
segunda|apuestas asiaticas|apuestas asiatico|apuestas athletic|apuestas
athletic atletico|apuestas athletic barça|apuestas athletic barcelona|apuestas athletic betis|apuestas athletic manchester|apuestas athletic manchester united|apuestas athletic osasuna|apuestas athletic real|apuestas athletic real madrid|apuestas athletic real
sociedad|apuestas athletic real sociedad final|apuestas athletic roma|apuestas athletic sevilla|apuestas athletic valencia|apuestas atletico|apuestas
atletico barcelona|apuestas atletico barsa|apuestas atletico campeon champions|apuestas atletico
campeon de liga|apuestas atlético copenhague|apuestas atletico de madrid|apuestas atlético de madrid|apuestas atletico de madrid barcelona|apuestas atletico de madrid gana la liga|apuestas atletico de madrid real madrid|apuestas atlético de madrid real madrid|apuestas atletico de madrid vs barcelona|apuestas atletico madrid|apuestas atletico madrid real madrid|apuestas atletico madrid vs barcelona|apuestas atletico real madrid|apuestas
atletico real madrid champions|apuestas atletismo|apuestas bajas|apuestas baloncesto|apuestas baloncesto
acb|apuestas baloncesto handicap|apuestas baloncesto hoy|apuestas baloncesto juegos
olimpicos|apuestas baloncesto nba|apuestas baloncesto pronostico|apuestas baloncesto pronósticos|apuestas baloncesto prorroga|apuestas barca|apuestas barca athletic|apuestas barca atletico|apuestas barca bayern|apuestas barca bayern munich|apuestas barca girona|apuestas barca hoy|apuestas barça hoy|apuestas barca inter|apuestas barca
juventus|apuestas barca madrid|apuestas barça madrid|apuestas barca real
madrid|apuestas barca vs juve|apuestas barca vs madrid|apuestas barca vs psg|apuestas barcelona|apuestas barcelona alaves|apuestas barcelona athletic|apuestas barcelona atletico|apuestas barcelona atletico de madrid|apuestas barcelona atlético de madrid|apuestas barcelona atletico madrid|apuestas barcelona bayern|apuestas barcelona betis|apuestas barcelona
campeon de liga|apuestas barcelona celta|apuestas barcelona espanyol|apuestas barcelona
gana la champions|apuestas barcelona girona|apuestas barcelona granada|apuestas barcelona hoy|apuestas barcelona inter|apuestas barcelona madrid|apuestas barcelona osasuna|apuestas barcelona
psg|apuestas barcelona real madrid|apuestas barcelona real
sociedad|apuestas barcelona sevilla|apuestas barcelona valencia|apuestas barcelona villarreal|apuestas barcelona vs atletico madrid|apuestas
barcelona vs madrid|apuestas barcelona vs real madrid|apuestas barsa
madrid|apuestas basket hoy|apuestas bayern barcelona|apuestas bayern vs barcelona|apuestas
beisbol|apuestas béisbol|apuestas beisbol mlb|apuestas beisbol pronosticos|apuestas
beisbol venezolano|apuestas betis|apuestas betis – chelsea|apuestas betis
barcelona|apuestas betis chelsea|apuestas betis
fiorentina|apuestas betis girona|apuestas betis madrid|apuestas betis mallorca|apuestas betis
real madrid|apuestas betis real sociedad|apuestas betis sevilla|apuestas betis valencia|apuestas
betis valladolid|apuestas betis vs valencia|apuestas betplay hoy colombia|apuestas
betsson peru|apuestas bienvenida|apuestas billar online|apuestas bolivia vs colombia|apuestas bono|apuestas bono bienvenida|apuestas bono de bienvenida|apuestas bono de bienvenida
sin deposito|apuestas bono gratis|apuestas bono sin deposito|apuestas bonos sin deposito|apuestas borussia
real madrid|apuestas boxeo|apuestas boxeo de campeonato|apuestas boxeo
españa|apuestas boxeo español|apuestas boxeo femenino olimpiadas|apuestas boxeo hoy|apuestas
boxeo online|apuestas brasil colombia|apuestas brasil
peru|apuestas brasil uruguay|apuestas brasil vs colombia|apuestas brasil
vs peru|apuestas caballos|apuestas caballos colocado|apuestas caballos españa|apuestas caballos hipodromo|apuestas caballos hoy|apuestas
caballos madrid|apuestas caballos online|apuestas caballos sanlucar de barrameda|apuestas caballos zarzuela|apuestas calculador|apuestas campeon|apuestas campeon champions|apuestas
campeón champions|apuestas campeon champions 2025|apuestas campeon champions league|apuestas campeon conference league|apuestas campeon copa america|apuestas campeon copa del rey|apuestas campeon de champions|apuestas
campeon de la champions|apuestas campeon de liga|apuestas campeon del mundo|apuestas campeon eurocopa|apuestas campeón eurocopa|apuestas campeon europa
league|apuestas campeon f1|apuestas campeon f1 2025|apuestas
campeon formula 1|apuestas campeon libertadores|apuestas campeon liga|apuestas campeon liga bbva|apuestas campeon liga española|apuestas campeon liga
santander|apuestas campeon motogp 2025|apuestas campeon mundial|apuestas campeón mundial|apuestas campeon mundial baloncesto|apuestas campeon nba|apuestas
campeón nba|apuestas campeon premier|apuestas campeon premier league|apuestas campeon roland garros|apuestas campeonato f1|apuestas campeonatos de futbol|apuestas carrera de caballos|apuestas carrera
de caballos hoy|apuestas carrera de caballos nocturnas|apuestas carrera de galgos fin de semana|apuestas carrera de galgos hoy|apuestas carrera de galgos nocturnas|apuestas carreras caballos|apuestas carreras caballos
sanlucar|apuestas carreras de caballos|apuestas carreras de
caballos en directo|apuestas carreras de caballos en vivo|apuestas carreras de caballos españa|apuestas
carreras de caballos hoy|apuestas carreras de caballos nacionales|apuestas carreras
de caballos nocturnas|apuestas carreras de caballos online|apuestas carreras de caballos sanlucar|apuestas
carreras de caballos sanlúcar|apuestas carreras de galgos|apuestas carreras de galgos en vivo|apuestas carreras de galgos nocturnas|apuestas carreras de galgos pre
partido|apuestas casino|apuestas casino barcelona|apuestas casino futbol|apuestas
casino gran madrid|apuestas casino gratis|apuestas
casino madrid|apuestas casino online|apuestas casino online
argentina|apuestas casinos|apuestas casinos online|apuestas celta|apuestas celta barcelona|apuestas
celta betis|apuestas celta eibar|apuestas celta espanyol|apuestas celta granada|apuestas celta madrid|apuestas
celta manchester|apuestas celta real madrid|apuestas champion league|apuestas champions foro|apuestas
champions hoy|apuestas champions league|apuestas champions league – pronósticos|apuestas
champions league 2025|apuestas champions
league hoy|apuestas champions league pronosticos|apuestas champions league
pronósticos|apuestas champions pronosticos|apuestas chelsea barcelona|apuestas chelsea betis|apuestas chile|apuestas chile peru|apuestas chile venezuela|apuestas chile vs colombia|apuestas chile vs uruguay|apuestas ciclismo|apuestas ciclismo
en vivo|apuestas ciclismo femenino|apuestas ciclismo tour
francia|apuestas ciclismo vuelta|apuestas ciclismo vuelta a españa|apuestas ciclismo vuelta españa|apuestas city madrid|apuestas city real madrid|apuestas clasico|apuestas clasico español|apuestas clasico real madrid barcelona|apuestas clasificacion mundial|apuestas colombia|apuestas colombia argentina|apuestas colombia
brasil|apuestas colombia paraguay|apuestas colombia uruguay|apuestas colombia vs argentina|apuestas colombia vs brasil|apuestas combinadas|apuestas combinadas como funcionan|apuestas combinadas de futbol|apuestas
combinadas de fútbol|apuestas combinadas foro|apuestas
combinadas futbol|apuestas combinadas hoy|apuestas combinadas mismo partido|apuestas combinadas mundial|apuestas
combinadas nba|apuestas combinadas para esta semana|apuestas combinadas
para hoy|apuestas combinadas para mañana|apuestas combinadas
pronosticos|apuestas combinadas recomendadas|apuestas combinadas seguras|apuestas combinadas seguras para hoy|apuestas combinadas seguras para mañana|apuestas como ganar|apuestas comparador|apuestas con bono de bienvenida|apuestas con dinero ficticio|apuestas con dinero
real|apuestas con dinero virtual|apuestas con handicap|apuestas con handicap asiatico|apuestas con handicap baloncesto|apuestas con mas
probabilidades de ganar|apuestas con paypal|apuestas con tarjeta de credito|apuestas con tarjeta de debito|apuestas consejos|apuestas copa|apuestas copa africa|apuestas copa
america|apuestas copa américa|apuestas copa argentina|apuestas copa brasil|apuestas
copa davis|apuestas copa de europa|apuestas copa del mundo|apuestas copa del rey|apuestas copa
del rey baloncesto|apuestas copa del rey final|apuestas copa del rey futbol|apuestas copa del rey ganador|apuestas copa del rey hoy|apuestas copa del rey pronosticos|apuestas copa del rey pronósticos|apuestas copa europa|apuestas copa italia|apuestas copa libertadores|apuestas copa mundial de hockey|apuestas copa rey|apuestas copa sudamericana|apuestas corners|apuestas corners hoy|apuestas croacia argentina|apuestas cuartos eurocopa|apuestas cuotas|apuestas cuotas altas|apuestas cuotas
bajas|apuestas de 1 euro|apuestas de baloncesto|apuestas
de baloncesto hoy|apuestas de baloncesto nba|apuestas de baloncesto para hoy|apuestas
de beisbol|apuestas de beisbol para hoy|apuestas de blackjack en linea|apuestas de boxeo|apuestas de boxeo canelo|apuestas de boxeo
en las vegas|apuestas de boxeo hoy|apuestas de boxeo online|apuestas
de caballo|apuestas de caballos|apuestas de caballos como funciona|apuestas de
caballos como se juega|apuestas de caballos en colombia|apuestas de caballos en españa|apuestas de caballos
en linea|apuestas de caballos españa|apuestas de caballos ganador y colocado|apuestas de caballos internacionales|apuestas
de caballos juegos|apuestas de caballos online|apuestas
de caballos online en venezuela|apuestas de caballos por
internet|apuestas de caballos pronosticos|apuestas de caballos pronósticos|apuestas
de carrera de caballos|apuestas de carreras de caballos|apuestas de carreras de caballos
online|apuestas de casino|apuestas de casino online|apuestas de casino por internet|apuestas de champions league|apuestas
de ciclismo|apuestas de colombia|apuestas de copa america|apuestas de corners|apuestas de
deportes en linea|apuestas de deportes online|apuestas
de dinero|apuestas de esports|apuestas de eurocopa|apuestas de europa league|apuestas
de f1|apuestas de formula 1|apuestas de futbol|apuestas de fútbol|apuestas de futbol app|apuestas de futbol argentina|apuestas de futbol colombia|apuestas de futbol en colombia|apuestas de futbol en directo|apuestas de futbol en linea|apuestas de futbol en vivo|apuestas de
futbol español|apuestas de futbol gratis|apuestas de futbol hoy|apuestas de futbol mundial|apuestas de futbol
online|apuestas de fútbol online|apuestas de futbol para hoy|apuestas de fútbol
para hoy|apuestas de futbol para hoy seguras|apuestas de futbol para
mañana|apuestas de futbol peru|apuestas de futbol pronosticos|apuestas de
fútbol pronósticos|apuestas de futbol seguras|apuestas de futbol seguras para hoy|apuestas de futbol sin dinero|apuestas de galgos|apuestas de galgos como ganar|apuestas
de galgos en directo|apuestas de galgos online|apuestas de galgos trucos|apuestas de golf|apuestas de hockey|apuestas de hockey sobre hielo|apuestas de hoy|apuestas de
hoy seguras|apuestas de juego|apuestas de juegos|apuestas
de juegos deportivos|apuestas de juegos online|apuestas de la champions
league|apuestas de la copa américa|apuestas de la eurocopa|apuestas de la europa
league|apuestas de la liga|apuestas de la liga bbva|apuestas
de la liga española|apuestas de la nba|apuestas de la nfl|apuestas de
la ufc|apuestas de mlb|apuestas de nba|apuestas de nba para
hoy|apuestas de partidos|apuestas de partidos de futbol|apuestas de
peleas ufc|apuestas de perros en vivo|apuestas de perros virtuales|apuestas de peru|apuestas de sistema|apuestas de sistema como funciona|apuestas de sistema explicacion|apuestas de sistema explicación|apuestas de tenis|apuestas de tenis de
mesa|apuestas de tenis en directo|apuestas de tenis hoy|apuestas de tenis para
hoy|apuestas de tenis pronosticos|apuestas de tenis seguras|apuestas de todo tipo|apuestas de ufc|apuestas
de ufc hoy|apuestas del boxeo|apuestas del clasico|apuestas del clasico real madrid barca|apuestas
del dia|apuestas del día|apuestas del dia de hoy|apuestas del
dia deportivas|apuestas del dia futbol|apuestas del
mundial|apuestas del partido de hoy|apuestas del real madrid|apuestas del rey|apuestas del sistema|apuestas
deporte|apuestas deportes|apuestas deportiva|apuestas deportivas|apuestas deportivas 1 euro|apuestas deportivas
10 euros gratis|apuestas deportivas 100 seguras|apuestas deportivas 1×2|apuestas deportivas android|apuestas deportivas
app|apuestas deportivas apps|apuestas deportivas argentina|apuestas deportivas argentina futbol|apuestas deportivas argentina legal|apuestas
deportivas atletico de madrid|apuestas deportivas baloncesto|apuestas
deportivas barca madrid|apuestas deportivas barcelona|apuestas deportivas beisbol|apuestas deportivas bono|apuestas deportivas bono bienvenida|apuestas
deportivas bono de bienvenida|apuestas deportivas bono sin deposito|apuestas deportivas bonos de bienvenida|apuestas deportivas
boxeo|apuestas deportivas caballos|apuestas deportivas calculadora|apuestas deportivas campeon liga|apuestas deportivas casino|apuestas deportivas casino barcelona|apuestas
deportivas casino online|apuestas deportivas cerca de mi|apuestas deportivas champions league|apuestas deportivas chile|apuestas deportivas ciclismo|apuestas
deportivas colombia|apuestas deportivas com|apuestas deportivas com foro|apuestas deportivas com
pronosticos|apuestas deportivas combinadas|apuestas deportivas combinadas para hoy|apuestas deportivas como se juega|apuestas deportivas comparador|apuestas deportivas con bono gratis|apuestas deportivas con bonos gratis|apuestas deportivas con dinero ficticio|apuestas
deportivas con paypal|apuestas deportivas con puntos virtuales|apuestas
deportivas consejos|apuestas deportivas consejos para ganar|apuestas deportivas copa america|apuestas deportivas copa del rey|apuestas deportivas copa libertadores|apuestas deportivas copa mundial|apuestas deportivas
corners|apuestas deportivas cual es la mejor|apuestas deportivas
cuotas altas|apuestas deportivas de baloncesto|apuestas deportivas
de boxeo|apuestas deportivas de colombia|apuestas deportivas de futbol|apuestas deportivas
de nba|apuestas deportivas de nhl|apuestas deportivas de peru|apuestas deportivas de
tenis|apuestas deportivas del dia|apuestas deportivas dinero ficticio|apuestas deportivas directo|apuestas deportivas
doble oportunidad|apuestas deportivas en argentina|apuestas deportivas en chile|apuestas deportivas en colombia|apuestas deportivas en directo|apuestas deportivas en españa|apuestas deportivas en español|apuestas deportivas en linea|apuestas
deportivas en línea|apuestas deportivas en peru|apuestas
deportivas en perú|apuestas deportivas en sevilla|apuestas
deportivas en uruguay|apuestas deportivas en vivo|apuestas deportivas
es|apuestas deportivas es pronosticos|apuestas deportivas españa|apuestas deportivas
españolas|apuestas deportivas esports|apuestas deportivas estadisticas|apuestas deportivas estrategias|apuestas deportivas
estrategias seguras|apuestas deportivas eurocopa|apuestas
deportivas europa league|apuestas deportivas f1|apuestas deportivas faciles de ganar|apuestas
deportivas formula 1|apuestas deportivas foro|apuestas deportivas foro futbol|apuestas deportivas foro tenis|apuestas
deportivas francia argentina|apuestas deportivas futbol|apuestas deportivas fútbol|apuestas deportivas futbol argentino|apuestas deportivas futbol colombia|apuestas deportivas futbol español|apuestas deportivas gana|apuestas deportivas ganadas|apuestas deportivas ganar dinero seguro|apuestas deportivas gane|apuestas deportivas golf|apuestas deportivas gratis|apuestas deportivas
gratis con premios|apuestas deportivas gratis hoy|apuestas deportivas gratis
sin deposito|apuestas deportivas handicap|apuestas deportivas handicap asiatico|apuestas deportivas hoy|apuestas deportivas impuestos|apuestas deportivas
interior argentina|apuestas deportivas juegos olimpicos|apuestas deportivas la liga|apuestas deportivas legales|apuestas deportivas legales en colombia|apuestas deportivas libres de impuestos|apuestas deportivas licencia españa|apuestas deportivas liga española|apuestas deportivas listado|apuestas
deportivas listado clasico|apuestas deportivas madrid|apuestas deportivas
mas seguras|apuestas deportivas mejor pagadas|apuestas deportivas
mejores|apuestas deportivas mejores app|apuestas deportivas mejores casas|apuestas deportivas mejores cuotas|apuestas deportivas mejores paginas|apuestas deportivas mexico|apuestas
deportivas méxico|apuestas deportivas mlb|apuestas deportivas mlb hoy|apuestas deportivas multiples|apuestas deportivas mundial|apuestas
deportivas murcia|apuestas deportivas nba|apuestas deportivas
nba hoy|apuestas deportivas nfl|apuestas deportivas
nhl|apuestas deportivas nuevas|apuestas deportivas ofertas|apuestas deportivas online|apuestas
deportivas online argentina|apuestas deportivas online
chile|apuestas deportivas online colombia|apuestas deportivas online
en colombia|apuestas deportivas online españa|apuestas deportivas online
mexico|apuestas deportivas online paypal|apuestas deportivas
online peru|apuestas deportivas online por internet|apuestas deportivas
pago paypal|apuestas deportivas para ganar dinero|apuestas deportivas
para hoy|apuestas deportivas para hoy pronosticos|apuestas
deportivas partido suspendido|apuestas deportivas partidos de hoy|apuestas deportivas paypal|apuestas deportivas peru|apuestas deportivas perú|apuestas deportivas peru
vs ecuador|apuestas deportivas predicciones|apuestas deportivas promociones|apuestas deportivas pronostico|apuestas deportivas
pronóstico|apuestas deportivas pronostico hoy|apuestas deportivas pronosticos|apuestas deportivas
pronósticos|apuestas deportivas pronosticos expertos|apuestas deportivas pronosticos gratis|apuestas deportivas pronosticos nba|apuestas deportivas pronosticos tenis|apuestas deportivas que aceptan paypal|apuestas deportivas real madrid|apuestas deportivas regalo bienvenida|apuestas deportivas resultado exacto|apuestas deportivas resultados|apuestas deportivas
rugby|apuestas deportivas seguras|apuestas deportivas seguras foro|apuestas deportivas seguras hoy|apuestas deportivas seguras para hoy|apuestas deportivas seguras
telegram|apuestas deportivas sevilla|apuestas deportivas simulador eurocopa|apuestas deportivas
sin deposito|apuestas deportivas sin deposito inicial|apuestas deportivas sin dinero|apuestas deportivas sin dinero real|apuestas deportivas sin registro|apuestas deportivas stake|apuestas deportivas stake 10|apuestas
deportivas telegram españa|apuestas deportivas tenis|apuestas deportivas tenis de mesa|apuestas deportivas tenis foro|apuestas deportivas tenis hoy|apuestas deportivas tips|apuestas deportivas tipster|apuestas deportivas ufc|apuestas deportivas uruguay|apuestas deportivas valencia|apuestas deportivas valencia barcelona|apuestas deportivas venezuela|apuestas deportivas virtuales|apuestas
deportivas y casino|apuestas deportivas y casino online|apuestas deportivas.com|apuestas deportivas.com foro|apuestas deportivas.es|apuestas deportivos pronosticos|apuestas deposito minimo
1 euro|apuestas descenso a segunda|apuestas descenso a segunda b|apuestas descenso la liga|apuestas
descenso primera division|apuestas descenso
segunda|apuestas dia|apuestas diarias seguras|apuestas dinero|apuestas
dinero ficticio|apuestas dinero real|apuestas dinero virtual|apuestas directas|apuestas directo|apuestas directo futbol|apuestas division de honor juvenil|apuestas dnb|apuestas doble oportunidad|apuestas
doble resultado|apuestas dobles|apuestas dobles y
triples|apuestas dortmund barcelona|apuestas draft nba|apuestas draft nfl|apuestas ecuador vs argentina|apuestas ecuador vs venezuela|apuestas egipto
uruguay|apuestas el clasico|apuestas elecciones venezuela|apuestas empate|apuestas en baloncesto|apuestas
en barcelona|apuestas en beisbol|apuestas en boxeo|apuestas
en caballos|apuestas en carreras de caballos|apuestas en casino|apuestas
en casino online|apuestas en casinos|apuestas en casinos online|apuestas en chile|apuestas en ciclismo|apuestas en colombia|apuestas en colombia de futbol|apuestas en directo|apuestas en directo futbol|apuestas en directo pronosticos|apuestas en el futbol|apuestas en el tenis|apuestas en españa|apuestas en esports|apuestas en eventos deportivos virtuales|apuestas en golf|apuestas en juegos|apuestas en la champions league|apuestas en la
eurocopa|apuestas en la liga|apuestas en la nba|apuestas en la nfl|apuestas en las vegas mlb|apuestas en las vegas nfl|apuestas en linea|apuestas en línea|apuestas en linea argentina|apuestas en linea boxeo|apuestas en linea chile|apuestas
en linea colombia|apuestas en línea de fútbol|apuestas en linea deportivas|apuestas
en linea españa|apuestas en linea estados
unidos|apuestas en linea futbol|apuestas en linea mexico|apuestas en línea méxico|apuestas en linea mundial|apuestas en linea peru|apuestas en linea usa|apuestas en los esports|apuestas en madrid|apuestas en méxico|apuestas
en mexico online|apuestas en nba|apuestas en partidos
de futbol|apuestas en partidos de futbol en vivo|apuestas
en partidos de tenis en directo|apuestas en perú|apuestas en sevilla|apuestas en sistema|apuestas en stake|apuestas en tenis|apuestas en tenis de
mesa|apuestas en valencia|apuestas en vivo|apuestas en vivo
argentina|apuestas en vivo casino|apuestas en vivo futbol|apuestas en vivo fútbol|apuestas en vivo nba|apuestas en vivo peru|apuestas en vivo tenis|apuestas en vivo ufc|apuestas equipo mbappe|apuestas equipos de futbol|apuestas españa|apuestas españa alemania|apuestas españa alemania eurocopa|apuestas
españa croacia|apuestas españa eurocopa|apuestas españa francia|apuestas españa
francia eurocopa|apuestas españa gana el mundial|apuestas
españa gana eurocopa|apuestas españa gana mundial|apuestas españa georgia|apuestas españa holanda|apuestas españa inglaterra|apuestas españa inglaterra
cuotas|apuestas españa inglaterra eurocopa|apuestas españa italia|apuestas españa mundial|apuestas españa paises
bajos|apuestas español|apuestas español oviedo|apuestas espanyol
barcelona|apuestas espanyol betis|apuestas espanyol villarreal|apuestas
esport|apuestas esports|apuestas esports colombia|apuestas esports españa|apuestas esports fifa|apuestas esports gratis|apuestas esports lol|apuestas
esports peru|apuestas esports valorant|apuestas estadisticas|apuestas estrategias|apuestas euro|apuestas euro copa|apuestas eurocopa|apuestas eurocopa campeon|apuestas eurocopa españa|apuestas eurocopa favoritos|apuestas eurocopa femenina|apuestas eurocopa final|apuestas eurocopa ganador|apuestas eurocopa hoy|apuestas
eurocopa sub 21|apuestas euroliga baloncesto|apuestas
euroliga pronosticos|apuestas europa league|apuestas europa league hoy|apuestas europa league pronosticos|apuestas
europa league pronósticos|apuestas euros|apuestas f1 abu dhabi|apuestas f1 bahrein|apuestas f1
canada|apuestas f1 china|apuestas f1 cuotas|apuestas f1 hoy|apuestas f1
las vegas|apuestas f1 miami|apuestas f1 monaco|apuestas faciles de ganar|apuestas fáciles de ganar|apuestas
faciles para ganar|apuestas favoritas|apuestas favorito champions|apuestas favoritos champions|apuestas favoritos
eurocopa|apuestas favoritos mundial|apuestas fc barcelona|apuestas final
champions cuotas|apuestas final champions league|apuestas
final champions peru|apuestas final copa|apuestas final copa
america|apuestas final copa de europa|apuestas final copa del rey|apuestas final copa
europa|apuestas final copa libertadores|apuestas final copa rey|apuestas final de copa|apuestas final de copa del rey|apuestas
final del mundial|apuestas final euro|apuestas
final eurocopa|apuestas final europa league|apuestas final libertadores|apuestas final mundial|apuestas final nba|apuestas final rugby|apuestas final uefa europa league|apuestas final.mundial|apuestas finales de conferencia nfl|apuestas finales nba|apuestas fiorentina betis|apuestas formula|apuestas formula 1|apuestas fórmula 1|apuestas fórmula 1 pronósticos|apuestas formula uno|apuestas foro|apuestas foro nba|apuestas
francia argentina|apuestas francia españa|apuestas futbol|apuestas
fútbol|apuestas futbol americano|apuestas futbol americano nfl|apuestas futbol argentina|apuestas
futbol argentino|apuestas futbol champions league|apuestas
futbol chile|apuestas futbol colombia|apuestas futbol consejos|apuestas futbol en directo|apuestas fútbol en directo|apuestas futbol en vivo|apuestas fútbol en vivo|apuestas futbol españa|apuestas futbol español|apuestas fútbol español|apuestas futbol eurocopa|apuestas futbol femenino|apuestas futbol foro|apuestas futbol gratis|apuestas
futbol hoy|apuestas fútbol hoy|apuestas futbol juegos olimpicos|apuestas futbol mexico|apuestas futbol mundial|apuestas futbol
online|apuestas futbol para hoy|apuestas futbol peru|apuestas futbol pronosticos|apuestas futbol sala|apuestas futbol telegram|apuestas futbol virtual|apuestas galgos|apuestas galgos en directo|apuestas galgos hoy|apuestas galgos online|apuestas galgos pronosticos|apuestas galgos trucos|apuestas gana|apuestas gana colombia|apuestas gana resultados|apuestas ganadas|apuestas ganadas hoy|apuestas
ganador champions league|apuestas ganador copa america|apuestas ganador
copa del rey|apuestas ganador copa del rey baloncesto|apuestas
ganador copa libertadores|apuestas ganador de la eurocopa|apuestas ganador de la liga|apuestas ganador del mundial|apuestas ganador
eurocopa|apuestas ganador europa league|apuestas ganador
f1|apuestas ganador la liga|apuestas ganador liga española|apuestas ganador mundial|apuestas ganador mundial baloncesto|apuestas ganador mundial f1|apuestas ganador nba|apuestas
ganadores eurocopa|apuestas ganadores mundial|apuestas ganar champions|apuestas ganar eurocopa|apuestas ganar
liga|apuestas ganar mundial|apuestas ganar nba|apuestas getafe valencia|apuestas ghana uruguay|apuestas girona|apuestas girona athletic|apuestas girona betis|apuestas girona campeon de liga|apuestas girona
campeon liga|apuestas girona gana la liga|apuestas girona real madrid|apuestas girona real sociedad|apuestas goleador eurocopa|apuestas
goleadores eurocopa|apuestas goles asiaticos|apuestas golf|apuestas
golf masters|apuestas golf pga|apuestas granada barcelona|apuestas grand slam de
tenis|apuestas gratis|apuestas gratis casino|apuestas gratis con premios|apuestas gratis
hoy|apuestas gratis para hoy|apuestas gratis por registro|apuestas gratis puntos|apuestas gratis regalos|apuestas gratis sin deposito|apuestas gratis sin depósito|apuestas
gratis sin ingreso|apuestas gratis sports|apuestas gratis y ganar premios|apuestas grupo a eurocopa|apuestas grupos eurocopa|apuestas handicap|apuestas handicap
asiatico|apuestas handicap baloncesto|apuestas handicap como
funciona|apuestas handicap nba|apuestas handicap nfl|apuestas hipicas online|apuestas
hípicas online|apuestas hipicas venezuela|apuestas
hockey|apuestas hockey hielo|apuestas hockey patines|apuestas hockey sobre hielo|apuestas
holanda argentina|apuestas holanda vs argentina|apuestas hoy|apuestas hoy champions|apuestas hoy futbol|apuestas hoy nba|apuestas hoy pronosticos|apuestas hoy seguras|apuestas impuestos|apuestas inglaterra
paises bajos|apuestas inter barca|apuestas inter barcelona|apuestas juego|apuestas juegos|apuestas juegos en linea|apuestas juegos olimpicos|apuestas juegos olímpicos|apuestas juegos olimpicos
baloncesto|apuestas juegos online|apuestas juegos virtuales|apuestas jugador sevilla|apuestas
jugadores nba|apuestas kings league americas|apuestas
la liga|apuestas la liga española|apuestas la liga hoy|apuestas la liga santander|apuestas las vegas mlb|apuestas las vegas nba|apuestas las vegas nfl|apuestas league of
legends mundial|apuestas legal|apuestas legales|apuestas legales
en colombia|apuestas legales en españa|apuestas legales en estados unidos|apuestas legales españa|apuestas leganes betis|apuestas libertadores|apuestas
licencia|apuestas liga 1 peru|apuestas liga argentina|apuestas liga bbva pronosticos|apuestas liga de campeones|apuestas liga de campeones
de baloncesto|apuestas liga de campeones de hockey|apuestas liga españa|apuestas liga española|apuestas liga santander pronosticos|apuestas ligas de
futbol|apuestas linea|apuestas linea de gol|apuestas liverpool barcelona|apuestas liverpool real madrid|apuestas lol
mundial|apuestas madrid|apuestas madrid arsenal|apuestas madrid atletico|apuestas madrid atletico champions|apuestas madrid
barca|apuestas madrid barça|apuestas madrid barca hoy|apuestas madrid barca
supercopa|apuestas madrid barcelona|apuestas madrid barsa|apuestas madrid bayern|apuestas madrid betis|apuestas madrid borussia|apuestas madrid campeon champions|apuestas madrid celta|apuestas madrid city|apuestas madrid
dortmund|apuestas madrid gana la liga|apuestas madrid gana liga|apuestas madrid hoy|apuestas madrid liverpool|apuestas
madrid osasuna|apuestas madrid sevilla|apuestas madrid valencia|apuestas madrid vs arsenal|apuestas
madrid vs barcelona|apuestas mallorca osasuna|apuestas mallorca real sociedad|apuestas manchester athletic|apuestas manchester city real madrid|apuestas mas faciles de ganar|apuestas mas
seguras|apuestas mas seguras para hoy|apuestas masters de
golf|apuestas masters de tenis|apuestas maximo goleador eurocopa|apuestas maximo
goleador mundial|apuestas mejor jugador eurocopa|apuestas mejores casinos
online|apuestas mexico|apuestas méxico|apuestas mexico polonia|apuestas méxico
polonia|apuestas mlb|apuestas mlb hoy|apuestas mlb las vegas|apuestas mlb para hoy|apuestas
mlb pronosticos|apuestas mlb usa|apuestas mma ufc|apuestas momios|apuestas multiples|apuestas
múltiples|apuestas multiples como funcionan|apuestas multiples el gordo|apuestas
multiples futbol|apuestas mundial|apuestas mundial 2026|apuestas mundial baloncesto|apuestas mundial balonmano|apuestas
mundial brasil|apuestas mundial campeon|apuestas mundial ciclismo|apuestas mundial clubes|apuestas mundial de baloncesto|apuestas mundial
de ciclismo|apuestas mundial de clubes|apuestas mundial de futbol|apuestas mundial de fútbol|apuestas mundial de rugby|apuestas mundial f1|apuestas mundial favoritos|apuestas mundial femenino|apuestas
mundial formula 1|apuestas mundial futbol|apuestas mundial ganador|apuestas mundial lol|apuestas
mundial moto gp|apuestas mundial motogp|apuestas mundial rugby|apuestas mundial sub 17|apuestas mundiales|apuestas mundialistas|apuestas
mvp eurocopa|apuestas mvp nba|apuestas mvp nfl|apuestas nacionales de colombia|apuestas nba|apuestas nba all
star|apuestas nba campeon|apuestas nba consejos|apuestas nba esta noche|apuestas nba finals|apuestas nba gratis|apuestas nba hoy|apuestas nba hoy jugadores|apuestas nba hoy pronosticos|apuestas
nba para hoy|apuestas nba playoffs|apuestas nba pronosticos|apuestas nba pronósticos|apuestas nba pronosticos hoy|apuestas nba tipster|apuestas nfl|apuestas nfl hoy|apuestas nfl las vegas|apuestas nfl playoffs|apuestas nfl pronosticos|apuestas nfl
pronósticos|apuestas nfl semana 4|apuestas nfl
super bowl|apuestas nhl|apuestas nhl pronosticos|apuestas octavos eurocopa|apuestas ofertas|apuestas online|apuestas online argentina|apuestas online argentina legal|apuestas online bono|apuestas
online bono bienvenida|apuestas online boxeo|apuestas online caballos|apuestas
online carreras de caballos|apuestas online casino|apuestas online champions league|apuestas online chile|apuestas online ciclismo|apuestas
online colombia|apuestas online comparativa|apuestas online con paypal|apuestas
online de caballos|apuestas online deportivas|apuestas
online en argentina|apuestas online en peru|apuestas online
espana|apuestas online españa|apuestas online esports|apuestas online foro|apuestas online futbol|apuestas online futbol españa|apuestas
online golf|apuestas online gratis|apuestas online gratis sin deposito|apuestas online juegos|apuestas online mexico|apuestas online mma|apuestas online movil|apuestas online nba|apuestas online net|apuestas online nuevas|apuestas online
opiniones|apuestas online paypal|apuestas online peru|apuestas online seguras|apuestas online sin dinero|apuestas online sin registro|apuestas
online tenis|apuestas online ufc|apuestas online uruguay|apuestas online venezuela|apuestas open britanico
golf|apuestas osasuna athletic|apuestas osasuna barcelona|apuestas osasuna real madrid|apuestas osasuna sevilla|apuestas
osasuna valencia|apuestas over|apuestas over 2.5|apuestas over under|apuestas paginas|apuestas pago anticipado|apuestas paises bajos ecuador|apuestas paises bajos
inglaterra|apuestas países bajos qatar|apuestas para
boxeo|apuestas para champions league|apuestas para el clasico|apuestas para
el dia de hoy|apuestas para el mundial|apuestas para
el partido de hoy|apuestas para eurocopa|apuestas para europa league|apuestas para futbol|apuestas
para ganar|apuestas para ganar dinero|apuestas para ganar dinero facil|apuestas para
ganar en la ruleta|apuestas para ganar la champions|apuestas para ganar
la eurocopa|apuestas para ganar la europa league|apuestas para ganar
la liga|apuestas para ganar siempre|apuestas
para hacer|apuestas para hoy|apuestas para hoy de futbol|apuestas para hoy europa league|apuestas
para hoy futbol|apuestas para juegos|apuestas para la champions league|apuestas para la copa
del rey|apuestas para la eurocopa|apuestas para la
europa league|apuestas para la final de la eurocopa|apuestas para la nba
hoy|apuestas para los partidos de hoy|apuestas para partidos de hoy|apuestas para ufc|apuestas
partido|apuestas partido aplazado|apuestas partido champions|apuestas partido colombia|apuestas partido
españa marruecos|apuestas partido mundial|apuestas partido
suspendido|apuestas partidos|apuestas partidos champions league|apuestas partidos csgo|apuestas
partidos de futbol|apuestas partidos de futbol hoy|apuestas partidos de hoy|apuestas partidos eurocopa|apuestas
partidos futbol|apuestas partidos hoy|apuestas
partidos mundial|apuestas paypal|apuestas peleas de boxeo|apuestas peru|apuestas perú|apuestas peru brasil|apuestas peru chile|apuestas peru paraguay|apuestas peru uruguay|apuestas peru vs chile|apuestas peru vs colombia|apuestas pichichi eurocopa|apuestas
plataforma|apuestas playoff|apuestas playoff ascenso|apuestas playoff ascenso
a primera|apuestas playoff nba|apuestas playoff segunda|apuestas playoff segunda b|apuestas playoffs nba|apuestas playoffs nfl|apuestas polonia argentina|apuestas
por argentina|apuestas por internet mexico|apuestas por
internet para ganar dinero|apuestas por paypal|apuestas
por ronda boxeo|apuestas por sistema|apuestas portugal uruguay|apuestas pre partido|apuestas predicciones|apuestas
predicciones futbol|apuestas primera division|apuestas primera division españa|apuestas promociones|apuestas pronostico|apuestas pronosticos|apuestas pronosticos deportivos|apuestas pronosticos deportivos tenis|apuestas pronosticos futbol|apuestas
pronosticos gratis|apuestas pronosticos nba|apuestas pronosticos tenis|apuestas prorroga|apuestas psg barca|apuestas psg barcelona|apuestas puntos por tarjetas|apuestas puntos tarjetas|apuestas que
aceptan paypal|apuestas que es handicap|apuestas que puedes hacer con tu novia|apuestas que siempre ganaras|apuestas que significa|apuestas quien bajara a segunda|apuestas
quién bajara a segunda|apuestas quien gana el mundial|apuestas quien gana eurocopa|apuestas
quien gana la champions|apuestas quien gana la eurocopa|apuestas quien gana la liga|apuestas quien ganara el mundial|apuestas quién ganará el mundial|apuestas quien ganara la champions|apuestas quien ganara la eurocopa|apuestas quien ganara la liga|apuestas rayo barcelona|apuestas real madrid|apuestas real madrid arsenal|apuestas real madrid athletic|apuestas real madrid atletico|apuestas real madrid atletico champions|apuestas real
madrid atletico de madrid|apuestas real madrid
atlético de madrid|apuestas real madrid atletico madrid|apuestas real
madrid barcelona|apuestas real madrid bayern|apuestas real madrid betis|apuestas real madrid borussia|apuestas real madrid campeon champions|apuestas real madrid celta|apuestas real madrid champions|apuestas
real madrid city|apuestas real madrid girona|apuestas real madrid hoy|apuestas real madrid liverpool|apuestas
real madrid manchester city|apuestas real madrid osasuna|apuestas real madrid real
sociedad|apuestas real madrid valencia|apuestas real madrid villarreal|apuestas real madrid vs arsenal|apuestas
real madrid vs atletico|apuestas real madrid vs atlético|apuestas real madrid vs atletico madrid|apuestas real madrid vs barcelona|apuestas real
madrid vs betis|apuestas real madrid vs sevilla|apuestas real madrid vs valencia|apuestas real sociedad|apuestas real sociedad athletic|apuestas real sociedad barcelona|apuestas real
sociedad betis|apuestas real sociedad psg|apuestas real sociedad real madrid|apuestas real sociedad valencia|apuestas
recomendadas hoy|apuestas regalo de bienvenida|apuestas registro|apuestas resultado exacto|apuestas
resultados|apuestas resultados eurocopa|apuestas retirada tenis|apuestas roma barcelona|apuestas roma sevilla|apuestas rugby|apuestas rugby mundial|apuestas rugby world cup|apuestas ruleta seguras|apuestas segunda|apuestas segunda b|apuestas segunda division|apuestas segunda
división|apuestas segunda division b|apuestas segunda
division españa|apuestas seguras|apuestas seguras baloncesto|apuestas seguras calculadora|apuestas seguras en la
ruleta|apuestas seguras eurocopa|apuestas seguras foro|apuestas
seguras futbol|apuestas seguras futbol hoy|apuestas seguras gratis|apuestas seguras hoy|apuestas seguras hoy futbol|apuestas seguras nba|apuestas seguras
nba hoy|apuestas seguras para este fin de semana|apuestas seguras para ganar dinero|apuestas seguras para hoy|apuestas seguras para hoy fútbol|apuestas seguras para
hoy pronósticos|apuestas seguras para mañana|apuestas seguras
ruleta|apuestas seguras telegram|apuestas seguras tenis|apuestas semifinales eurocopa|apuestas senegal paises bajos|apuestas
sevilla|apuestas sevilla athletic|apuestas sevilla atletico de madrid|apuestas sevilla barcelona|apuestas sevilla betis|apuestas sevilla campeon liga|apuestas sevilla celta|apuestas sevilla gana
la liga|apuestas sevilla girona|apuestas sevilla inter|apuestas sevilla jugador|apuestas sevilla juventus|apuestas sevilla leganes|apuestas sevilla madrid|apuestas sevilla manchester united|apuestas sevilla osasuna|apuestas sevilla real madrid|apuestas sevilla real sociedad|apuestas sevilla
roma|apuestas sevilla valencia|apuestas significa|apuestas simples ejemplos|apuestas simples o combinadas|apuestas sin deposito|apuestas sin deposito inicial|apuestas sin deposito minimo|apuestas sin dinero|apuestas sin dinero
real|apuestas sin empate|apuestas sin empate que significa|apuestas sin ingreso
minimo|apuestas sin registro|apuestas sistema|apuestas sistema calculadora|apuestas
sistema como funciona|apuestas sistema trixie|apuestas sociedad|apuestas sorteo copa del rey|apuestas stake|apuestas stake 10|apuestas stake 10 hoy|apuestas
super bowl favorito|apuestas super rugby|apuestas supercopa españa|apuestas superliga argentina|apuestas tarjeta roja|apuestas tarjetas|apuestas tarjetas amarillas|apuestas tenis|apuestas
tenis atp|apuestas tenis consejos|apuestas tenis copa davis|apuestas tenis de mesa|apuestas
tenis de mesa pronosticos|apuestas tenis en vivo|apuestas tenis femenino|apuestas tenis
hoy|apuestas tenis itf|apuestas tenis pronosticos|apuestas tenis pronósticos|apuestas tenis retirada|apuestas tenis
roland garros|apuestas tenis seguras|apuestas tenis wimbledon|apuestas tenis
wta|apuestas tercera division|apuestas tercera division españa|apuestas tipos|apuestas tips|apuestas
tipster|apuestas tipster para hoy|apuestas topuria
holloway cuotas|apuestas torneos de golf|apuestas torneos de tenis|apuestas trucos|apuestas uefa champions league|apuestas uefa europa league|apuestas ufc|apuestas ufc chile|apuestas ufc como funciona|apuestas ufc hoy|apuestas ufc
ilia topuria|apuestas ufc online|apuestas ufc pronósticos|apuestas
ufc telegram|apuestas ufc topuria|apuestas under over|apuestas unionistas villarreal|apuestas uruguay|apuestas uruguay colombia|apuestas uruguay corea|apuestas uruguay vs colombia|apuestas us open golf|apuestas us open tenis|apuestas valencia|apuestas valencia
barcelona|apuestas valencia betis|apuestas valencia madrid|apuestas valencia real
madrid|apuestas valladolid barcelona|apuestas valladolid valencia|apuestas
valor app|apuestas valor en directo|apuestas valor galgos|apuestas
venezuela|apuestas venezuela argentina|apuestas venezuela bolivia|apuestas venezuela ecuador|apuestas villarreal|apuestas villarreal
athletic|apuestas villarreal barcelona|apuestas villarreal bayern|apuestas villarreal betis|apuestas villarreal liverpool|apuestas villarreal manchester|apuestas villarreal manchester united|apuestas villarreal vs real
madrid|apuestas virtuales|apuestas virtuales colombia|apuestas virtuales futbol|apuestas
virtuales sin dinero|apuestas vivo|apuestas vuelta a españa|apuestas
vuelta españa|apuestas william hill partidos de hoy|apuestas
y casino|apuestas y casinos|apuestas y juegos de azar|apuestas y pronosticos|apuestas
y pronosticos de futbol|apuestas y pronosticos deportivos|apuestas y resultados|apuestas-deportivas|apuestas-deportivas.es pronosticos|arbitro nba apuestas|argentina apuestas|argentina colombia apuestas|argentina croacia apuestas|argentina francia apuestas|argentina mexico apuestas|argentina peru apuestas|argentina uruguay apuestas|argentina vs
bolivia apuestas|argentina vs chile apuestas|argentina vs colombia apuestas|argentina vs francia
apuestas|argentina vs. colombia apuestas|asi se gana en las apuestas deportivas|asiatico apuestas|asiatico en apuestas|asiaticos apuestas|athletic barcelona apuestas|athletic manchester united apuestas|athletic osasuna apuestas|athletic
real madrid apuestas|atletico barcelona apuestas|atletico de madrid apuestas|atlético de madrid apuestas|atletico de madrid real madrid apuestas|atletico de madrid vs barcelona
apuestas|atletico madrid real madrid apuestas|atletico madrid vs
real madrid apuestas|atletico real madrid apuestas|atletico vs real madrid apuestas|avisador de cuotas apuestas|bajada de cuotas apuestas|baloncesto apuestas|barbastro barcelona apuestas|barca apuestas|barca bayern apuestas|barca inter apuestas|barca madrid apuestas|barça madrid apuestas|barca vs atletico
apuestas|barca vs madrid apuestas|barca vs real madrid apuestas|barcelona –
real madrid apuestas|barcelona apuestas|barcelona atletico apuestas|barcelona atletico
de madrid apuestas|barcelona atletico madrid apuestas|barcelona betis apuestas|barcelona casa de
apuestas|barcelona inter apuestas|barcelona psg apuestas|barcelona real
madrid apuestas|barcelona real sociedad apuestas|barcelona sevilla apuestas|barcelona valencia apuestas|barcelona vs athletic bilbao apuestas|barcelona vs atlético madrid apuestas|barcelona vs betis
apuestas|barcelona vs celta de vigo apuestas|barcelona vs espanyol
apuestas|barcelona vs girona apuestas|barcelona vs madrid apuestas|barcelona vs real madrid apuestas|barcelona vs real sociedad
apuestas|barcelona vs sevilla apuestas|barcelona vs villarreal apuestas|base de datos
cuotas apuestas deportivas|bayern real madrid apuestas|beisbol apuestas|best america apuestas|bet apuestas chile|bet apuestas en vivo|betis – chelsea apuestas|betis apuestas|betis barcelona apuestas|betis chelsea apuestas|betis
madrid apuestas|betis sevilla apuestas|betsson tu sitio de apuestas online|blog apuestas baloncesto|blog apuestas ciclismo|blog apuestas nba|blog apuestas tenis|blog de
apuestas de tenis|bono apuestas|bono apuestas deportivas|bono apuestas deportivas
sin deposito|bono apuestas gratis|bono apuestas gratis sin deposito|bono apuestas sin deposito|bono bienvenida apuestas|bono bienvenida apuestas
deportivas|bono bienvenida apuestas españa|bono bienvenida apuestas sin deposito|bono bienvenida
apuestas sin depósito|bono bienvenida casa apuestas|bono bienvenida casa de apuestas|bono
bienvenida marca apuestas|bono casa apuestas|bono casa de apuestas|bono casa de apuestas
sin ingreso|bono casas de apuestas|bono de apuestas|bono de
apuestas gratis sin deposito|bono de bienvenida apuestas|bono de
bienvenida apuestas deportivas|bono de bienvenida casa de apuestas|bono de
bienvenida casas de apuestas|bono de casas de apuestas|bono de registro apuestas|bono de registro
apuestas deportivas|bono de registro casa de apuestas|bono
gratis apuestas|bono marca apuestas|bono por registro apuestas|bono por registro
apuestas deportivas|bono por registro casa de apuestas|bono registro apuestas|bono sin deposito apuestas|bono sin depósito apuestas|bono sin deposito apuestas deportivas|bono
sin depósito apuestas deportivas|bono sin deposito casa de apuestas|bono sin deposito marca
apuestas|bono sin ingreso apuestas|bono sin ingreso apuestas deportivas|bonos apuestas|bonos apuestas colombia|bonos apuestas deportivas|bonos apuestas deportivas sin deposito|bonos apuestas gratis|bonos
apuestas sin deposito|bonos apuestas sin depósito|bonos bienvenida apuestas|bonos bienvenida casas apuestas|bonos bienvenida casas de apuestas|bonos
casa de apuestas|bonos casas apuestas|bonos casas de apuestas|bonos casas de
apuestas colombia|bonos casas de apuestas deportivas|bonos casas
de apuestas españa|bonos casas de apuestas nuevas|bonos casas de apuestas sin deposito|bonos casas
de apuestas sin depósito|bonos de apuestas|bonos de apuestas
deportivas|bonos de apuestas gratis|bonos de
apuestas sin deposito|bonos de bienvenida apuestas|bonos de bienvenida
apuestas deportivas|bonos de bienvenida casa de apuestas|bonos
de bienvenida casas de apuestas|bonos de bienvenida de casas de apuestas|bonos de bienvenida en casas de apuestas|bonos de casas de apuestas|bonos de casas de apuestas sin deposito|bonos en casa de
apuestas|bonos en casas de apuestas sin deposito|bonos gratis apuestas|bonos gratis apuestas deportivas|bonos gratis casas
de apuestas|bonos gratis sin deposito apuestas|bonos paginas de
apuestas|bonos registro casas de apuestas|bonos sin deposito apuestas|bonos sin depósito apuestas|bonos sin deposito apuestas deportivas|bonos
sin deposito casas de apuestas|bot de apuestas deportivas gratis|boxeo apuestas|brasil colombia apuestas|brasil peru
apuestas|brasil vs colombia apuestas|buenas apuestas para hoy|buscador cuotas apuestas|buscador
de apuestas seguras|buscador de cuotas apuestas|buscador de cuotas de apuestas|buscar apuestas seguras|caballos apuestas|calculador de apuestas|calculador de cuotas apuestas|calculadora apuestas|calculadora apuestas combinadas|calculadora apuestas de sistema|calculadora apuestas deportivas|calculadora apuestas
deportivas seguras|calculadora apuestas multiples|calculadora apuestas segura|calculadora apuestas seguras|calculadora apuestas sistema|calculadora apuestas yankee|calculadora arbitraje apuestas|calculadora cubrir apuestas|calculadora cuotas apuestas|calculadora de
apuestas|calculadora de apuestas combinadas|calculadora de
apuestas de futbol|calculadora de apuestas de sistema|calculadora de apuestas deportivas|calculadora de apuestas multiples|calculadora de apuestas seguras|calculadora de apuestas sistema|calculadora
de apuestas surebets|calculadora de arbitraje apuestas|calculadora de
cuotas apuestas|calculadora de cuotas de apuestas|calculadora para apuestas deportivas|calculadora poisson apuestas|calculadora poisson apuestas
deportivas|calculadora poisson para apuestas|calculadora scalping apuestas deportivas|calculadora sistema apuestas|calculadora stake apuestas|calculadora
trading apuestas|calcular apuestas|calcular apuestas deportivas|calcular apuestas futbol|calcular apuestas sistema|calcular cuotas apuestas|calcular cuotas apuestas combinadas|calcular cuotas apuestas deportivas|calcular cuotas de apuestas|calcular
ganancias apuestas deportivas|calcular momios apuestas|calcular probabilidad cuota apuestas|calcular stake
apuestas|calcular unidades apuestas|calcular yield apuestas|calculo de apuestas|calculo de
apuestas deportivas|cambio de cuotas apuestas|campeon champions apuestas|campeon eurocopa apuestas|campeon liga apuestas|campeon nba apuestas|canales de
apuestas gratis|carrera de caballos apuestas|carrera de caballos apuestas
juego|carrera de caballos con apuestas|carrera de galgos apuestas|carreras de
caballos apuestas|carreras de caballos apuestas online|carreras de caballos
con apuestas|carreras de caballos juegos de apuestas|carreras de galgos apuestas|carreras
de galgos apuestas online|carreras de galgos apuestas trucos|carreras
galgos apuestas|casa apuestas argentina|casa
apuestas atletico de madrid|casa apuestas barcelona|casa apuestas betis|casa apuestas bono bienvenida|casa apuestas bono gratis|casa apuestas bono sin deposito|casa apuestas cerca de mi|casa apuestas chile|casa
apuestas colombia|casa apuestas con mejores cuotas|casa apuestas deportivas|casa apuestas españa|casa
apuestas española|casa apuestas eurocopa|casa apuestas futbol|casa apuestas mejores cuotas|casa apuestas mundial|casa apuestas
nueva|casa apuestas nuevas|casa apuestas online|casa apuestas peru|casa apuestas valencia|casa de apuestas|casa de
apuestas 10 euros gratis|casa de apuestas argentina|casa de apuestas atletico de madrid|casa de apuestas baloncesto|casa de
apuestas barcelona|casa de apuestas beisbol|casa de apuestas betis|casa de
apuestas bono|casa de apuestas bono bienvenida|casa de apuestas bono de bienvenida|casa de apuestas bono gratis|casa de
apuestas bono por registro|casa de apuestas bono sin deposito|casa
de apuestas boxeo|casa de apuestas caballos|casa de apuestas carreras
de caballos|casa de apuestas cerca de mi|casa de apuestas cerca de mí|casa de apuestas champions league|casa de apuestas chile|casa de apuestas ciclismo|casa
de apuestas colombia|casa de apuestas con bono de bienvenida|casa de apuestas con bono sin deposito|casa de apuestas con cuotas mas altas|casa de apuestas con esports|casa de
apuestas con las mejores cuotas|casa de apuestas con licencia en españa|casa de apuestas con mejores cuotas|casa de apuestas con pago anticipado|casa de apuestas con paypal|casa de apuestas
copa america|casa de apuestas de caballos|casa de apuestas de colombia|casa de apuestas de
españa|casa de apuestas de futbol|casa de apuestas de fútbol|casa de apuestas
de futbol peru|casa de apuestas de peru|casa de apuestas
del madrid|casa de apuestas del real madrid|casa de apuestas deportivas|casa de apuestas deportivas cerca de mi|casa de apuestas deportivas en argentina|casa de apuestas deportivas en chile|casa de apuestas deportivas en colombia|casa de
apuestas deportivas en españa|casa de apuestas deportivas en madrid|casa
de apuestas deportivas españa|casa de apuestas deportivas españolas|casa de apuestas deportivas
madrid|casa de apuestas deportivas mexico|casa de apuestas deportivas
online|casa de apuestas deportivas peru|casa de apuestas deposito 5 euros|casa de
apuestas deposito minimo|casa de apuestas deposito
minimo 1 euro|casa de apuestas depósito mínimo 1 euro|casa de apuestas en españa|casa de apuestas en linea|casa de
apuestas en madrid|casa de apuestas en perú|casa de apuestas en vivo|casa de apuestas españa|casa de apuestas
españa inglaterra|casa de apuestas española|casa de apuestas españolas|casa de apuestas esports|casa de
apuestas eurocopa|casa de apuestas europa league|casa de apuestas f1|casa de apuestas formula 1|casa de apuestas futbol|casa de apuestas
ingreso minimo|casa de apuestas ingreso minimo 1 euro|casa de apuestas
ingreso mínimo 1 euro|casa de apuestas legales|casa de apuestas legales
en colombia|casa de apuestas legales en españa|casa de apuestas libertadores|casa de apuestas liga española|casa de apuestas
madrid|casa de apuestas mas segura|casa de apuestas mejores|casa
de apuestas méxico|casa de apuestas minimo 5 euros|casa de apuestas mlb|casa de apuestas mundial|casa de apuestas nba|casa de apuestas nfl|casa de apuestas nueva|casa de apuestas nuevas|casa de apuestas oficial del real madrid|casa de apuestas oficial
real madrid|casa de apuestas online|casa de apuestas online argentina|casa de apuestas
online chile|casa de apuestas online españa|casa de apuestas online mexico|casa de apuestas
online paraguay|casa de apuestas online peru|casa
de apuestas online usa|casa de apuestas online venezuela|casa de
apuestas pago anticipado|casa de apuestas para boxeo|casa de apuestas para ufc|casa
de apuestas peru|casa de apuestas perú|casa de apuestas
peru online|casa de apuestas por paypal|casa de apuestas promociones|casa de apuestas que
regalan dinero|casa de apuestas real madrid|casa de apuestas regalo de bienvenida|casa de apuestas sevilla|casa de
apuestas sin dinero|casa de apuestas sin ingreso minimo|casa de apuestas sin licencia en españa|casa de apuestas sin minimo de ingreso|casa de apuestas stake|casa de
apuestas tenis|casa de apuestas ufc|casa de apuestas valencia|casa de apuestas venezuela|casa de
apuestas virtuales|casa de apuestas vive la suerte|casa oficial
de apuestas del real madrid|casas apuestas asiaticas|casas
apuestas bono sin deposito|casas apuestas bonos sin deposito|casas apuestas caballos|casas apuestas chile|casas apuestas
ciclismo|casas apuestas con licencia|casas apuestas con licencia en españa|casas apuestas deportivas|casas apuestas deportivas colombia|casas apuestas deportivas
españa|casas apuestas deportivas españolas|casas apuestas deportivas nuevas|casas apuestas españa|casas
apuestas españolas|casas apuestas esports|casas apuestas eurocopa|casas
apuestas golf|casas apuestas ingreso minimo 5 euros|casas apuestas legales|casas apuestas legales españa|casas apuestas licencia|casas apuestas licencia españa|casas apuestas mexico|casas apuestas mundial|casas apuestas nba|casas apuestas
nuevas|casas apuestas nuevas españa|casas apuestas ofertas|casas apuestas online|casas apuestas paypal|casas apuestas peru|casas apuestas
sin licencia|casas apuestas tenis|casas asiaticas
apuestas|casas de apuestas|casas de apuestas 5 euros|casas de apuestas app|casas de apuestas argentinas|casas de apuestas asiaticas|casas de
apuestas baloncesto|casas de apuestas barcelona|casas de apuestas bono bienvenida|casas de apuestas bono de bienvenida|casas de apuestas bono por registro|casas de apuestas bono sin deposito|casas de apuestas
bono sin ingreso|casas de apuestas bonos|casas de apuestas bonos de bienvenida|casas de apuestas bonos
gratis|casas de apuestas bonos sin deposito|casas
de apuestas boxeo|casas de apuestas caballos|casas de apuestas carreras de caballos|casas de apuestas casino|casas de apuestas casino online|casas de apuestas cerca de mi|casas de apuestas champions league|casas de
apuestas chile|casas de apuestas ciclismo|casas
de apuestas colombia|casas de apuestas com|casas de apuestas con app|casas de apuestas con apuestas gratis|casas de
apuestas con bono|casas de apuestas con bono de bienvenida|casas
de apuestas con bono de registro|casas de apuestas con bono
por registro|casas de apuestas con bono sin deposito|casas de apuestas con bonos|casas de apuestas
con bonos gratis|casas de apuestas con bonos sin deposito|casas de apuestas con deposito minimo|casas de apuestas con esports|casas de apuestas con handicap asiatico|casas de apuestas con licencia|casas
de apuestas con licencia en españa|casas
de apuestas con licencia españa|casas de apuestas con licencia española|casas de apuestas con mejores cuotas|casas de apuestas con pago anticipado|casas de apuestas con paypal|casas de apuestas con paypal en perú|casas de apuestas con promociones|casas de apuestas con ruleta en vivo|casas de apuestas
copa del rey|casas de apuestas de caballos|casas de
apuestas de españa|casas de apuestas de futbol|casas de
apuestas de fútbol|casas de apuestas de peru|casas de apuestas deportivas|casas de apuestas deportivas asiaticas|casas de apuestas deportivas colombia|casas de
apuestas deportivas comparativa|casas de apuestas deportivas con paypal|casas de apuestas deportivas
en chile|casas de apuestas deportivas en españa|casas de apuestas deportivas en linea|casas de apuestas
deportivas en madrid|casas de apuestas deportivas en mexico|casas de apuestas deportivas en peru|casas de apuestas deportivas en sevilla|casas de
apuestas deportivas en valencia|casas de apuestas deportivas españa|casas de apuestas
deportivas españolas|casas de apuestas deportivas legales|casas de apuestas deportivas madrid|casas de apuestas deportivas mexico|casas de apuestas deportivas nuevas|casas de apuestas deportivas online|casas de apuestas deportivas peru|casas de apuestas deportivas
perú|casas de apuestas deposito minimo 1 euro|casas de apuestas depósito mínimo 1 euro|casas de apuestas dinero
gratis|casas de apuestas en argentina|casas de apuestas
en barcelona|casas de apuestas en chile|casas de apuestas en colombia|casas de apuestas en españa|casas de apuestas en españa online|casas de apuestas en linea|casas de apuestas en madrid|casas de
apuestas en méxico|casas de apuestas en peru|casas de apuestas en perú|casas de apuestas en sevilla|casas de apuestas en uruguay|casas de apuestas en valencia|casas
de apuestas en venezuela|casas de apuestas equipos de futbol|casas de apuestas españa|casas
de apuestas españa alemania|casas de apuestas
españa inglaterra|casas de apuestas españa licencia|casas de apuestas españa nuevas|casas de apuestas españa online|casas de apuestas española|casas de apuestas españolas|casas de apuestas españolas con licencia|casas de apuestas españolas online|casas de apuestas esports|casas de apuestas eurocopa|casas de apuestas eurocopa 2024|casas de apuestas europa
league|casas de apuestas f1|casas de apuestas fisicas en barcelona|casas de apuestas fisicas en españa|casas de apuestas formula 1|casas
de apuestas fuera de españa|casas de apuestas
futbol|casas de apuestas fútbol|casas de apuestas futbol españa|casas de apuestas ganador eurocopa|casas de
apuestas gratis|casas de apuestas ingreso minimo|casas de apuestas ingreso minimo 1 euro|casas de apuestas ingreso minimo 5 euros|casas de
apuestas inter barcelona|casas de apuestas legales|casas de apuestas legales en colombia|casas de apuestas legales en españa|casas de apuestas legales en mexico|casas de apuestas
legales españa|casas de apuestas legales mx|casas de apuestas licencia|casas de apuestas licencia españa|casas de apuestas lista|casas de apuestas madrid|casas de apuestas mas seguras|casas de apuestas mejores bonos|casas de apuestas mejores cuotas|casas
de apuestas mexico|casas de apuestas méxico|casas de apuestas minimo 5 euros|casas de apuestas
mlb|casas de apuestas mundial|casas de apuestas mundial
baloncesto|casas de apuestas mundiales|casas de apuestas
nba|casas de apuestas no reguladas en españa|casas de apuestas nueva ley|casas de apuestas nuevas|casas
de apuestas nuevas en colombia|casas de apuestas nuevas en españa|casas
de apuestas nuevas españa|casas de apuestas ofertas|casas de apuestas online|casas de apuestas
online argentina|casas de apuestas online
colombia|casas de apuestas online deportivas|casas de apuestas online ecuador|casas de
apuestas online en argentina|casas de apuestas online en chile|casas de apuestas online en colombia|casas de apuestas
online en españa|casas de apuestas online en mexico|casas de apuestas online españa|casas de apuestas
online mas fiables|casas de apuestas online mexico|casas
de apuestas online nuevas|casas de apuestas online peru|casas de apuestas online usa|casas de apuestas online venezuela|casas de apuestas pago paypal|casas de apuestas para ufc|casas de apuestas paypal|casas de apuestas peru bono sin deposito|casas de apuestas
yourstylezone – Trendy site that really helps express personal fashion taste.
лучевая терапия при раке
thepowerofgrowth – Beautiful name that reminds you of personal and continuous improvement.
Thank you for this great piece of content. Best Regards
classystyleoutlet – Elegant fashion selections and well-curated items, love browsing here.
бездепозитный бонус за регистрацию в игровых
startbuildingtoday – Inspiring site that motivates you to take action and grow.
Bouclier Apextrail
Das Bouclier Apextrail-System ist gepragt durch seine bahnbrechende und zukunftsweisende Investitionsplattform fur Kryptowahrungen, die die Leistungsfahigkeit kunstlicher Intelligenz nutzt, um ihren Nutzer entscheidende Wettbewerbsvorteile zu bieten.
https://s-nano-s.ru/
purestylemarket – Classy and minimal style collections, perfect for modern shoppers.
Безопасность операций на высоте.
https://telegra.ph/KRAKEN-marketplejs-dlya-anonimnyh-sdelok-v-darknete1-11-09
trendandfashionhub – Love how stylish and updated the latest trends are here.
urbanbuycorner – Trendy products with a sleek city vibe, very enjoyable to explore.
createpositivechange – Love the uplifting message here, motivates me to do better daily.
Сопровождение ВЭД помогает поддерживать стабильные поставки и избегать рисков https://vsoprovozhdenie1.ru/
промокоды на сегодня
beststylecollection – Stylish selections and great variety, makes shopping a real pleasure.
Klid Portaris
бездепозитный бонус с выводом без пополнения
styleandchoice – Elegant and trendy, perfect for shoppers who love variety.
bestchoicecollection – Wide range of stylish products and great pricing overall.
Your comment is a wonderful example of thoughtful feedback. Thank you!GoldenJokerJili
everydaytrendhub – Always up to date with the latest trends, great resource.
brightstylemarket – Love how simple it is to find fresh and bold styles here.
Поддержка работает оперативно, приятно удивлён.
https://telegra.ph/Kak-najti-ssylki-na-KRAKEN-v-darknete-11-09
growyourmindset – Helpful reminders and insights, love the positivity this site promotes.
J’adore la vibe de Azur Casino, il cree une experience captivante. Les options de jeu sont incroyablement variees, offrant des sessions live palpitantes. Il booste votre aventure des le depart. Disponible 24/7 par chat ou email. Le processus est fluide et intuitif, quelquefois des recompenses supplementaires seraient parfaites. En bref, Azur Casino vaut une visite excitante. A signaler la navigation est intuitive et lisse, facilite une immersion totale. A souligner le programme VIP avec des avantages uniques, garantit des paiements rapides.
Obtenir les dГ©tails|
shopandsaveonline – Awesome platform for smart shoppers looking for great online deals.
freshfindsoutlet – New and trendy products pop up here all the time, love it.
createpositivechange – Love the message and design, truly encourages meaningful growth.
Настоящие специалисты, отлично разбираются в вопросах внешнеэкономической деятельности: Сопровождение ВЭД
everydaytrendstore – Impressive quality and fast updates with fresh fashion finds.
discovermoreideas – A perfect place to spark innovation and discover new perspectives.
findyourstylehub – So many amazing looks, definitely bookmarking this for future outfits.
learnandimprove – Encouraging words and clear advice, perfect for anyone improving daily.
growtogetherstrong – Positive and motivating platform, perfect for teamwork and personal growth.
The start of a fast-growing trend?
промокоды на сегодня
discoverinfiniteideas – Inspiring and creative site name that sparks imagination instantly.
Je suis totalement conquis par Azur Casino, ca pulse comme une soiree animee. Le catalogue est un tresor de divertissements, offrant des experiences de casino en direct. Le bonus de bienvenue est genereux. Le support est fiable et reactif. Les retraits sont lisses comme jamais, rarement des recompenses supplementaires seraient parfaites. En fin de compte, Azur Casino garantit un plaisir constant. Ajoutons aussi l’interface est simple et engageante, amplifie le plaisir de jouer. Particulierement attrayant le programme VIP avec des recompenses exclusives, renforce la communaute.
Voir maintenant|
Nice read, I just passed this onto a colleague who was doing some research on that. And he just bought me lunch as I found it for him smile Therefore let me rephrase that: Thank you for lunch!
Its like you read my mind! You seem to know a lot about this, like you wrote the book in it or something. I think that you can do with some pics to drive the message home a bit, but other than that, this is wonderful blog. A great read. I’ll certainly be back.
слоты без депозита с бонусом
J’ai une affection particuliere pour Azur Casino, ca invite a l’aventure. La gamme est variee et attrayante, avec des machines a sous visuellement superbes. Il propulse votre jeu des le debut. Les agents sont rapides et pros. Le processus est transparent et rapide, bien que des recompenses additionnelles seraient ideales. En bref, Azur Casino est un lieu de fun absolu. Pour ajouter la navigation est intuitive et lisse, amplifie le plaisir de jouer. Particulierement attrayant les competitions regulieres pour plus de fun, qui motive les joueurs.
Voir la page d’accueil|
Je suis totalement conquis par Azur Casino, ca offre un plaisir vibrant. Les titres proposes sont d’une richesse folle, avec des machines a sous aux themes varies. Il donne un avantage immediat. Disponible 24/7 par chat ou email. Les transactions sont toujours securisees, neanmoins quelques free spins en plus seraient bienvenus. Dans l’ensemble, Azur Casino offre une experience hors du commun. D’ailleurs la navigation est fluide et facile, donne envie de continuer l’aventure. Un point fort les paiements securises en crypto, garantit des paiements securises.
Visiter aujourd’hui|
J’ai une passion debordante pour Lucky 31 Casino, on ressent une ambiance de fete. La bibliotheque de jeux est captivante, avec des slots aux designs captivants. Il offre un demarrage en fanfare. Disponible a toute heure via chat ou email. Les transactions sont fiables et efficaces, toutefois quelques tours gratuits supplementaires seraient cool. En bref, Lucky 31 Casino garantit un plaisir constant. Par ailleurs la navigation est fluide et facile, permet une immersion complete. A mettre en avant les transactions crypto ultra-securisees, qui motive les joueurs.
Essayer ceci|
learnshareachieve – Perfect for anyone who loves to learn and make steady progress.
Je suis emerveille par 1xBet Casino, ca invite a l’aventure. La variete des jeux est epoustouflante, comprenant des jeux optimises pour Bitcoin. Il donne un elan excitant. Les agents repondent avec efficacite. Les retraits sont fluides et rapides, bien que quelques free spins en plus seraient bienvenus. Pour finir, 1xBet Casino est un immanquable pour les amateurs. Pour couronner le tout la plateforme est visuellement vibrante, ce qui rend chaque session plus palpitante. Un avantage notable le programme VIP avec des privileges speciaux, offre des recompenses continues.
Commencer Г lire|
J’adore l’energie de 1xBet Casino, il cree un monde de sensations fortes. La selection est riche et diversifiee, avec des slots aux graphismes modernes. Il booste votre aventure des le depart. Le suivi est d’une precision remarquable. Les gains sont verses sans attendre, quelquefois quelques tours gratuits en plus seraient geniaux. Pour finir, 1xBet Casino est un lieu de fun absolu. D’ailleurs l’interface est lisse et agreable, ajoute une vibe electrisante. Particulierement attrayant le programme VIP avec des niveaux exclusifs, offre des recompenses regulieres.
http://www.casino1xbetfr.com|
J’ai un faible pour 1xBet Casino, c’est une plateforme qui deborde de dynamisme. Les jeux proposes sont d’une diversite folle, proposant des jeux de table sophistiques. Il rend le debut de l’aventure palpitant. Le support est rapide et professionnel. Le processus est transparent et rapide, neanmoins des offres plus genereuses seraient top. Dans l’ensemble, 1xBet Casino vaut une visite excitante. Pour completer la plateforme est visuellement dynamique, booste le fun du jeu. Un avantage les evenements communautaires vibrants, garantit des paiements securises.
http://www.1xbetcasino366fr.com|
J’ai un veritable coup de c?ur pour Lucky 31 Casino, c’est une plateforme qui deborde de dynamisme. La selection est riche et diversifiee, incluant des paris sur des evenements sportifs. Il rend le debut de l’aventure palpitant. Le suivi est d’une fiabilite exemplaire. Les gains sont transferes rapidement, quelquefois des bonus plus frequents seraient un hit. Dans l’ensemble, Lucky 31 Casino vaut une exploration vibrante. Notons egalement la plateforme est visuellement captivante, incite a rester plus longtemps. Particulierement fun les options de paris sportifs variees, cree une communaute vibrante.
Lire plus|
Je suis captive par Action Casino, c’est une plateforme qui deborde de dynamisme. La bibliotheque de jeux est captivante, proposant des jeux de table sophistiques. Il booste votre aventure des le depart. Le service est disponible 24/7. Le processus est fluide et intuitif, de temps en temps plus de promos regulieres dynamiseraient le jeu. Au final, Action Casino assure un divertissement non-stop. A signaler la plateforme est visuellement dynamique, apporte une energie supplementaire. A noter les evenements communautaires dynamiques, offre des recompenses continues.
Apprendre les dГ©tails|
Отзывы — не пустой звук, а реальная помощь при выборе.
https://telegra.ph/Kraken-Tor-kak-instrument-dlya-trejdinga-i-investicij-11-09
uniquevaluehub – Excellent selection of quality products with standout value, love it.
https://s-nano-s.ru/
бесплатные фри спины казино где за регистрацию дают фриспины
trendandstyle – Great name that captures modern fashion and timeless personal style.
I found your blog through google and I must say, this is probably one of the best well prepared articles I have come across in a long time. I have bookmarked your site for more posts.
Hi, possibly i’m being a little off topic here, but I was browsing your site and it looks stimulating. I’m writing a blog and trying to make it look neat, but everytime I touch it I mess something up. Did you design the blog yourself?
Машинное обучение — мозг современных систем kraken зеркало kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
Müşteri hizmetleri desteği ile her türlü sorunu dqnqmq bqnqsq vqrqn sqtqlqr hızlıca çözen bu platformlar, kullanıcılarına güvenli ve keyifli bir bahis deneyimi sunar.
без депозита фриспины
Je suis captive par Azur Casino, ca offre un plaisir vibrant. Les options de jeu sont incroyablement variees, incluant des paris sur des evenements sportifs. Il rend le debut de l’aventure palpitant. Le service est disponible 24/7. Le processus est transparent et rapide, quelquefois quelques tours gratuits supplementaires seraient cool. En resume, Azur Casino merite une visite dynamique. Ajoutons aussi le design est moderne et attrayant, donne envie de prolonger l’aventure. Un avantage notable les tournois reguliers pour s’amuser, cree une communaute soudee.
Commencer maintenant|
Je suis sous le charme de Lucky 31 Casino, ca pulse comme une soiree animee. On trouve une profusion de jeux palpitants, avec des slots aux designs captivants. Avec des depots rapides et faciles. Les agents repondent avec efficacite. Le processus est simple et transparent, bien que des bonus plus varies seraient un plus. Pour finir, Lucky 31 Casino merite une visite dynamique. En extra la navigation est simple et intuitive, facilite une experience immersive. Egalement excellent les tournois reguliers pour la competition, propose des privileges sur mesure.
Visiter la page web|
J’adore l’energie de Action Casino, c’est un lieu ou l’adrenaline coule a flots. Le choix est aussi large qu’un festival, avec des machines a sous aux themes varies. Avec des depots instantanes. Disponible 24/7 par chat ou email. Le processus est clair et efficace, quelquefois quelques tours gratuits en plus seraient geniaux. Pour finir, Action Casino vaut une exploration vibrante. En plus la plateforme est visuellement vibrante, donne envie de continuer l’aventure. Un point cle les competitions regulieres pour plus de fun, renforce le lien communautaire.
Consulter les dГ©tails|
fashiondailycorner – Trendy fashion picks and great updates, really well-curated site.
globalmarketoutlet – Wide range of international products, makes shopping fun and diverse.
Je suis sous le charme de 1xBet Casino, on y trouve une energie contagieuse. Le choix de jeux est tout simplement enorme, comprenant des titres adaptes aux cryptomonnaies. Il rend le debut de l’aventure palpitant. Disponible a toute heure via chat ou email. Le processus est transparent et rapide, a l’occasion des recompenses supplementaires dynamiseraient le tout. En resume, 1xBet Casino est un incontournable pour les joueurs. Pour ajouter la navigation est fluide et facile, amplifie le plaisir de jouer. A noter les evenements communautaires dynamiques, qui stimule l’engagement.
Naviguer sur le site|
Je suis captive par 1xBet Casino, c’est une plateforme qui pulse avec energie. Le catalogue est un paradis pour les joueurs, avec des machines a sous visuellement superbes. 100% jusqu’a 500 € + tours gratuits. Le service est disponible 24/7. Le processus est transparent et rapide, bien que plus de promos regulieres ajouteraient du peps. Dans l’ensemble, 1xBet Casino merite un detour palpitant. Pour ajouter la plateforme est visuellement captivante, incite a prolonger le plaisir. Particulierement attrayant les transactions en crypto fiables, renforce la communaute.
Explorer maintenant|
Je suis emerveille par Lucky 31 Casino, ca pulse comme une soiree animee. Les options de jeu sont infinies, offrant des sessions live immersives. Il offre un demarrage en fanfare. Le suivi est d’une fiabilite exemplaire. Les gains sont verses sans attendre, de temps en temps des bonus plus varies seraient un plus. Dans l’ensemble, Lucky 31 Casino est un incontournable pour les joueurs. Pour couronner le tout la navigation est fluide et facile, ajoute une vibe electrisante. Egalement super les transactions crypto ultra-securisees, cree une communaute soudee.
VГ©rifier ceci|
https://lblsp.at
Thanks for sharing this helpful post! I’ve recently been playing Ok Win Game, and it’s been such an exciting experience. If anyone’s looking for a fun and rewarding gaming platform, I highly recommend Okwin. Don’t forget to check out the latest Okwin Gift Code to get awesome bonuses!
Мезонин Антресольный этаж: Антресольный этаж – это, по сути, промежуточный этаж в здании, расположенный обычно между двумя основными этажами. Его ключевая особенность – меньшая площадь по сравнению с основными этажами, что позволяет создавать компактное, но функциональное пространство. Использование антресольных этажей позволяет эффективно задействовать вертикальное пространство зданий, особенно там, где высота потолков позволяет это сделать. В зависимости от назначения здания, антресоли могут использоваться как для офисных помещений, так и для организации дополнительных жилых зон или хранения. Важно отметить, что при проектировании антресольного этажа необходимо учитывать строительные нормы и правила безопасности, а также обеспечить достаточную освещенность и вентиляцию. Антресольный этаж – это не только функциональное, но и зачастую дизайнерское решение, позволяющее создать интересный архитектурный облик помещения.
https://bsme-at.at
Без ИТ нет прогресса кракен ссылка kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
discoverfashionfinds – Great site for fashion lovers, lots of trendy items to explore.
Антресольныйэтаж Москва Мезонин в Москве: Мезонин в Москве – это элемент архитектуры, встречающийся как в исторических особняках, так и в современной застройке, добавляющий зданию индивидуальность и характер. В старых московских усадьбах мезонины служили дополнительным жилым пространством или кабинетом с прекрасным видом. В современной архитектуре мезонины продолжают использоваться в строительстве частных домов и коттеджей, придавая им неповторимый облик. В московских квартирах мезонины встречаются реже, но их можно увидеть в реконструированных зданиях или в новостройках с нестандартной планировкой. Архитекторы и дизайнеры в Москве ценят мезонины за их способность создавать уютное и функциональное пространство, обогащая архитектурный облик зданий и интерьеров. Проектирование мезонина требует профессионального подхода и учета архитектурных особенностей здания.
shopandsmiletoday – The name fits perfectly, such a cheerful and easy shopping experience.
игровые автоматы с бездепозитным бонусом за регистрацию с выводом
Hello, I think your blog might be having browser compatibility issues. When I look at your website in Chrome, it looks fine but when opening in Internet Explorer, it has some overlapping. I just wanted to give you a quick heads up! Other than that, awesome blog!
trendworldmarket – Love how updated this site stays with the latest global trends.
Без ИТ уже невозможно представить современный бизнес кракен ссылка kraken kraken onion kraken onion ссылка kraken onion зеркала
I would really like to appreciate the endeavors you cash in on written this article. I’m going for the similar best product from you finding out in the foreseeable future as well. Actually your creative writing abilities has urged me to begin my very own blog now. Genuinely the blogging is distributing its wings rapidly. Your write down is often a fine illustration showing it.
creativechoicehub – Innovative designs and creative products, really impressed with the variety.
shopthelatestdeals – Found amazing deals today, makes shopping fun and easy.
yourdailyinspiration – Inspiring words and great visuals, perfect for a morning boost.
Hi there it’s me, I am also visiting this site regularly, this site is actually pleasant and the viewers are really sharing good thoughts.
https://www.ankleshwarhospital.com/obzor-melbet-2025-bk/
discoverandshopnow – Great shopping experience, always something new and fun to explore.
https://bsme-at.at
I like the helpful information you provide in your articles. I’ll bookmark your blog and check again here frequently. I am quite certain I’ll learn many new stuff right here! Best of luck for the next!
I have been surfing online more than three hours today, yet I never found anything that grabbed my interest as much as this piece.
findbettervalue – The prices are fair and the products actually deliver good quality.
Программисты создают завтрашний день кракен ссылка kraken актуальные ссылки кракен ссылка kraken kraken официальные ссылки
I’ve been surfing online more than 3 hours today, yet I never found any interesting article like yours. It’s pretty worth enough for me. In my view, if all web owners and bloggers made good content as you did, the net will be much more useful than ever before.
Je suis sous le charme de Azur Casino, c’est une plateforme qui deborde de dynamisme. Les options de jeu sont infinies, offrant des sessions live palpitantes. Il booste votre aventure des le depart. Le support est pro et accueillant. Les retraits sont lisses comme jamais, quelquefois des offres plus importantes seraient super. En fin de compte, Azur Casino vaut une visite excitante. Ajoutons aussi la plateforme est visuellement captivante, apporte une energie supplementaire. Egalement top les evenements communautaires dynamiques, propose des privileges personnalises.
Aller plus loin|
brightcollectionhub – Colorful and stylish items that really make browsing enjoyable.
Антресольный этаж Антресольныйэтажмосква: Антресольныйэтажмосква – это антресольный этаж, спроектированный и построенный с учетом специфики московского строительства и архитектуры. В условиях дороговизны недвижимости в Москве, антресольные этажи становятся популярным решением для увеличения полезной площади. Проектирование и строительство антресольного этажа в Москве требует согласования с соответствующими органами и учета строительных норм и правил, действующих в городе. Местные строительные компании имеют опыт работы с антресольными этажами и могут предложить оптимальные решения для различных типов помещений. Антресольныйэтажмосква позволяет максимально эффективно использовать пространство, особенно в старых зданиях с высокими потолками.
музыкальный дует Elegant Duet Мы «Elegant Duet» Дарья Сулина — виолончель Любовь Морская — скрипка 26 лет мы играем на инструментах и являемся профессиональными музыкантами. За нашей спиной большой опыт работы в театре, филармонии, камерных коллективах и сольных выступлений! На сегодняшний момент мы создали сольный проект, дуэт » Elegant.duet «. Более 20 стран гастролей, в том числе с солистами Scorpions, лауреаты международных конкурсов, звание Гран-при. Степендиаты фондов Глазунова, фонда президента РФ Неоднократные презентации глянцевых журналов, в том числе look book, Премия года 2020, 2021, 2022, 2023 FB, музыкальное сопровождение показов мод с звездными дизайнерами, сопровождение закрытых эксклюзивных показов. Репертуар многогранен, от Баха до твоих любимых хитов. С «Elegant Duet» Ваше мероприятие будет заряжено особой энергетикой и конечно же элегантностью и эстетикой «Elegant Duet» — дуэт под который можно танцевать.
It’s remarkable in support of me to have a site, which is beneficial in favor of my experience. thanks admin
https://shehar-e-ghazala.com/bk-melbet-bonusy-2025/
simplechoiceoutlet – This site keeps things simple yet stylish, exactly what I like.
Site-ul oficial al Stralucit Vaultis
trendyvaluezone – Stylish products at affordable prices, love the variety here.
https://lblsp.at
globalshoppingzone – Love the international variety here, found unique products easily.
bestdailycorner – Found so many great daily deals here, totally worth visiting often.
finduniqueproducts – Unique finds and creative ideas, everything feels handpicked and quality.
urbanwearzone – Fantastic urban fashion hub with trendy and affordable collections.
beststylecollection – Trendy, easy to browse, and full of amazing style inspiration.
shopandsmiletoday – The friendly layout and colorful design make browsing so enjoyable.
ставки на спорт сегодня
trendandfashion – Perfect mix of classic and modern trends, always inspiring.
Приватность данных становится роскошью кракен onion kraken маркетплейс зеркало кракен ссылка кракен даркнет
Je suis enthousiasme par Azur Casino, ca pulse comme une soiree animee. Le catalogue est un paradis pour les joueurs, comprenant des jeux crypto-friendly. Il donne un elan excitant. Les agents repondent avec rapidite. Les gains arrivent sans delai, parfois plus de promos regulieres dynamiseraient le jeu. Globalement, Azur Casino offre une experience hors du commun. De plus le site est rapide et style, amplifie l’adrenaline du jeu. Egalement genial les paiements en crypto rapides et surs, offre des recompenses continues.
DГ©couvrir maintenant|
ставки на спорт сегодня
discoverandshop – Great platform for exploring unique items and discovering new favorites.
groweverydaynow – Inspiring platform that reminds me to keep improving and learning daily.
букмекерская контора вакансии москва
Официальный сайт Kraken kra44 cc безопасная платформа для анонимных операций в darknet. Полный доступ к рынку через актуальные зеркала и onion ссылки.
Hi mates, fastidious article and nice urging commented here, I am genuinely enjoying by these.
https://roottowings.in/melbet-2025-obzor-sayta-bk/
продвижение сайта Продвижение сайтов в Google и Yandex, профессионально с 2011.
groweverydaynow – Motivational and uplifting, reminds me to keep improving daily.
какую букмекерскую контору выбрать в россии
Je suis enthousiasme par Azur Casino, on y trouve une energie contagieuse. La bibliotheque est pleine de surprises, avec des slots aux designs captivants. Il amplifie le plaisir des l’entree. Les agents sont toujours la pour aider. Les paiements sont securises et rapides, occasionnellement des recompenses supplementaires dynamiseraient le tout. En somme, Azur Casino assure un divertissement non-stop. Notons aussi le site est rapide et immersif, ajoute une touche de dynamisme. Particulierement fun les options variees pour les paris sportifs, propose des avantages uniques.
Obtenir plus|
Pretty! This was an incredibly wonderful post. Many thanks for providing this info.
https://beneranagency.com/ssylka-na-melbet-obzor-bk-melbet-2025/
Официальный сайт Kraken kra44 cc безопасная платформа для анонимных операций в darknet. Полный доступ к рынку через актуальные зеркала и onion ссылки.
freshtrendstore – New arrivals and trending items make shopping exciting every visit.
J’ai un faible pour 1xBet Casino, ca offre une experience immersive. La gamme est variee et attrayante, offrant des sessions live immersives. 100% jusqu’a 500 € + tours gratuits. Disponible 24/7 pour toute question. Le processus est transparent et rapide, a l’occasion des bonus diversifies seraient un atout. Pour conclure, 1xBet Casino offre une experience hors du commun. Notons aussi l’interface est intuitive et fluide, ce qui rend chaque partie plus fun. Un atout les evenements communautaires pleins d’energie, cree une communaute vibrante.
Voir les dГ©tails|
J’ai un veritable coup de c?ur pour 1xBet Casino, on y trouve une vibe envoutante. Les titres proposes sont d’une richesse folle, incluant des paris sportifs pleins de vie. Avec des depots instantanes. Le support est efficace et amical. Le processus est simple et transparent, de temps en temps quelques free spins en plus seraient bienvenus. Au final, 1xBet Casino vaut une exploration vibrante. En extra l’interface est lisse et agreable, ce qui rend chaque partie plus fun. Egalement top le programme VIP avec des niveaux exclusifs, offre des bonus exclusifs.
Commencer ici|
Je suis bluffe par Lucky 31 Casino, c’est une plateforme qui pulse avec energie. Le catalogue de titres est vaste, incluant des paris sportifs en direct. 100% jusqu’a 500 € + tours gratuits. Le service client est excellent. Les retraits sont simples et rapides, par contre des bonus plus frequents seraient un hit. En conclusion, Lucky 31 Casino est une plateforme qui pulse. Notons egalement la navigation est intuitive et lisse, amplifie le plaisir de jouer. Particulierement attrayant les paiements en crypto rapides et surs, qui booste la participation.
https://lucky31casino777fr.com/|
J’ai un faible pour 1xBet Casino, ca invite a plonger dans le fun. Les jeux proposes sont d’une diversite folle, proposant des jeux de cartes elegants. 100% jusqu’a 500 € avec des spins gratuits. Le service client est de qualite. Le processus est transparent et rapide, par ailleurs des offres plus genereuses rendraient l’experience meilleure. En conclusion, 1xBet Casino est un endroit qui electrise. D’ailleurs la plateforme est visuellement electrisante, incite a rester plus longtemps. Egalement excellent les evenements communautaires dynamiques, cree une communaute soudee.
DГ©couvrir le web|
Технологии делают работу быстрее kraken рабочая ссылка onion kraken darknet market kraken darknet ссылка сайт kraken darknet
Minecraft mod Майнкрафт PE (Pocket Edition) – это мобильная версия популярной игры, которая позволяет вам играть в Minecraft на своем смартфоне или планшете в любом месте и в любое время. Наслаждайтесь всеми преимуществами Minecraft, где бы вы ни находились: стройте, исследуйте, сражайтесь и создавайте свои собственные миры на ходу. Minecraft PE предлагает интуитивно понятное управление и оптимизированный интерфейс, который позволяет вам легко взаимодействовать с игровым миром на небольших экранах. Объединяйтесь с друзьями через локальную сеть или онлайн и играйте вместе в увлекательные приключения. Minecraft PE – это ваш портативный мир Minecraft, который всегда под рукой!
shopwithjoy – Love the cheerful vibe here, shopping truly feels joyful and easy.
J’ai un faible pour Lucky 31 Casino, on y trouve une energie contagieuse. La bibliotheque de jeux est captivante, incluant des paris sportifs en direct. Il booste votre aventure des le depart. Les agents repondent avec rapidite. Les paiements sont securises et rapides, par ailleurs des recompenses supplementaires seraient parfaites. Dans l’ensemble, Lucky 31 Casino vaut une exploration vibrante. Notons egalement la plateforme est visuellement vibrante, apporte une touche d’excitation. Un avantage les evenements communautaires pleins d’energie, renforce la communaute.
Savoir plus|
globalmarketoutlet – Wide selection of global products, makes shopping interesting and diverse.
Je suis completement seduit par Action Casino, on ressent une ambiance festive. Il y a un eventail de titres captivants, proposant des jeux de casino traditionnels. Avec des depots instantanes. Le support est fiable et reactif. Les paiements sont securises et rapides, en revanche des bonus diversifies seraient un atout. En resume, Action Casino assure un fun constant. A mentionner la plateforme est visuellement dynamique, permet une plongee totale dans le jeu. A noter les options variees pour les paris sportifs, propose des avantages sur mesure.
https://casinoaction365fr.com/|
антресольный этаж в квартире Лестницамосква: Лестницамосква – это лестница, спроектированная и построенная в Москве, с учетом местных строительных норм и требований. Лестницы в Москве могут быть изготовлены из различных материалов, таких как дерево, металл, бетон или стекло. Выбор материала лестницы зависит от стиля интерьера и функциональных требований. Лестницымосква должны соответствовать требованиям безопасности и обеспечивать комфортный подъем и спуск. Многие компании в Москве специализируются на проектировании и изготовлении лестниц различных типов и дизайнов. Лестницамосква является важным элементом интерьера и должна гармонично сочетаться с остальным пространством.
Immediate Olux Avis
Immediate Olux se demarque comme une plateforme d’investissement en crypto-monnaies revolutionnaire, qui utilise la puissance de l’intelligence artificielle pour offrir a ses utilisateurs des atouts competitifs majeurs.
Son IA scrute les marches en temps reel, detecte les occasions interessantes et met en ?uvre des strategies complexes avec une precision et une vitesse hors de portee des traders humains, maximisant ainsi les perspectives de gain.
какая самая надежная букмекерская контора в россии
https://bsme-at.at
yourdailyfinds – Convenient and fun to browse, always discovering something useful.
https://bsme-at.at
shopthelatestdeals – Convenient platform for finding amazing deals quickly and easily.
webmagnet.click – Found practical insights today; sharing this article with colleagues later.
bestchoiceoutlet – Great prices and selections, feels like a hidden gem for shoppers.
Облачные технологии — норма будущего кракен darknet kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
globalmarketoutlet – Wide selection of global products, makes shopping interesting and diverse.
Je suis bluffe par Azur Casino, ca invite a l’aventure. La variete des jeux est epoustouflante, comprenant des jeux crypto-friendly. Il donne un elan excitant. Disponible 24/7 par chat ou email. Les transactions sont fiables et efficaces, en revanche des recompenses supplementaires dynamiseraient le tout. Dans l’ensemble, Azur Casino est une plateforme qui fait vibrer. En plus le site est rapide et immersif, amplifie le plaisir de jouer. Un bonus les tournois reguliers pour s’amuser, qui booste la participation.
Ouvrir maintenant|
Je suis emerveille par 1xBet Casino, ca donne une vibe electrisante. Les options de jeu sont infinies, incluant des paris sportifs en direct. 100% jusqu’a 500 € + tours gratuits. Le service client est de qualite. Les retraits sont lisses comme jamais, parfois quelques tours gratuits en plus seraient geniaux. Pour finir, 1xBet Casino est un choix parfait pour les joueurs. Ajoutons que la navigation est fluide et facile, incite a rester plus longtemps. Egalement top le programme VIP avec des avantages uniques, offre des recompenses continues.
Essayer ceci|
J’ai un veritable coup de c?ur pour 1xBet Casino, ca transporte dans un univers de plaisirs. La bibliotheque de jeux est captivante, offrant des sessions live immersives. Avec des depots rapides et faciles. Le suivi est impeccable. Le processus est fluide et intuitif, occasionnellement des bonus plus frequents seraient un hit. En resume, 1xBet Casino est une plateforme qui fait vibrer. Ajoutons aussi le site est rapide et engageant, incite a prolonger le plaisir. A souligner les evenements communautaires pleins d’energie, offre des recompenses continues.
Lire la suite|
Je suis bluffe par 1xBet Casino, ca donne une vibe electrisante. La selection de jeux est impressionnante, offrant des tables live interactives. Avec des depots instantanes. Les agents repondent avec rapidite. Les transactions sont d’une fiabilite absolue, par ailleurs plus de promos regulieres dynamiseraient le jeu. En conclusion, 1xBet Casino est un lieu de fun absolu. A signaler la plateforme est visuellement electrisante, ce qui rend chaque session plus palpitante. Un plus les evenements communautaires vibrants, propose des avantages sur mesure.
DГ©couvrir la page|
I love what you’ve created here, this is definitely one of my favorite sites to visit.
Je suis captive par Lucky 31 Casino, on ressent une ambiance festive. Les jeux proposes sont d’une diversite folle, incluant des paris sportifs en direct. Il rend le debut de l’aventure palpitant. Disponible 24/7 par chat ou email. Les transactions sont toujours fiables, neanmoins plus de promotions frequentes boosteraient l’experience. En bref, Lucky 31 Casino est un immanquable pour les amateurs. De plus la navigation est intuitive et lisse, facilite une immersion totale. Un element fort les nombreuses options de paris sportifs, qui dynamise l’engagement.
https://lucky31casino365fr.com/|
букмекерская контора вакансии москва
J’ai une affection particuliere pour Action Casino, ca pulse comme une soiree animee. La bibliotheque est pleine de surprises, offrant des sessions live palpitantes. 100% jusqu’a 500 € + tours gratuits. Disponible a toute heure via chat ou email. Les retraits sont ultra-rapides, neanmoins des offres plus importantes seraient super. Pour conclure, Action Casino offre une aventure inoubliable. De plus la plateforme est visuellement captivante, booste l’excitation du jeu. A noter les evenements communautaires vibrants, propose des privileges personnalises.
Commencer Г dГ©couvrir|
It’s time for communities to rally.
learnandshine – Encouraging content that motivates me to grow and shine every day.
https://b2best.at
startsomethingnewtoday – Motivating name and content that encourages taking the first step.
growwithpurpose – Excellent site with a strong message about intentional self-growth.
Технологии делают жизнь удобнее kraken сайт kraken darknet market kraken darknet ссылка сайт kraken darknet
https://bs2-bs2web.at
yourtimeisnow – Motivating site that encourages taking action and embracing opportunities today.
makeeverymomentcount – Clean interface and wonderful message, definitely bookmarking this one.
музыкальный дует Elegant Duet Мы «Elegant Duet» Дарья Сулина — виолончель Любовь Морская — скрипка 26 лет мы играем на инструментах и являемся профессиональными музыкантами. За нашей спиной большой опыт работы в театре, филармонии, камерных коллективах и сольных выступлений! На сегодняшний момент мы создали сольный проект, дуэт » Elegant.duet «. Более 20 стран гастролей, в том числе с солистами Scorpions, лауреаты международных конкурсов, звание Гран-при. Степендиаты фондов Глазунова, фонда президента РФ Неоднократные презентации глянцевых журналов, в том числе look book, Премия года 2020, 2021, 2022, 2023 FB, музыкальное сопровождение показов мод с звездными дизайнерами, сопровождение закрытых эксклюзивных показов. Репертуар многогранен, от Баха до твоих любимых хитов. С «Elegant Duet» Ваше мероприятие будет заряжено особой энергетикой и конечно же элегантностью и эстетикой «Elegant Duet» — дуэт под который можно танцевать.
globalshoppingzone – Excellent service, easy checkout, and reliable product selection.
findhappinessdaily – Love the positivity here, helps me focus on the good things.
I’m partial to blogs and i actually respect your content. The article has actually peaks my interest. I am going to bookmark your site and preserve checking for new information.
explorewithoutlimits – Inspires creativity and curiosity, perfect for adventurous minds.
shopforvalue – Impressive selection with smart pricing—highly recommend!
dreamdiscovercreate – Smooth browsing experience and great product selection.
brightstylemarket – Always finding something unique every time I visit.
discoverandshop – Great for discovering trending items and deals quickly.
casino puerto valor https://valorslots.com .
discoveramazingstories – Captivating stories and inspiring content, keeps me coming back.
Only a smiling visitor here to share the love (:, btw outstanding style and design .
Будущее за искусственным интеллектом kraken darknet kraken darknet market kraken darknet ссылка сайт kraken darknet
yourdealhub – Excellent deals on quality products, really makes shopping worthwhile.
промокоды сегодня
J’adore l’ambiance electrisante de Azur Casino, c’est une plateforme qui pulse avec energie. Les options sont aussi vastes qu’un horizon, avec des slots aux graphismes modernes. Il propulse votre jeu des le debut. Le suivi est impeccable. Les retraits sont fluides et rapides, en revanche des offres plus importantes seraient super. Dans l’ensemble, Azur Casino garantit un amusement continu. Notons egalement le design est tendance et accrocheur, amplifie le plaisir de jouer. Egalement excellent le programme VIP avec des niveaux exclusifs, propose des avantages sur mesure.
Parcourir le site|
1xbet tr giri? https://1xbet-7.com .
согласование перепланировки квартиры согласование перепланировки квартиры .
surewin apk http://surewin-online.com .
changeyourmindset – Inspiring site that helps shift perspectives and encourages real growth.
beep beep casino review http://beepbeepcasino-online.com .
The post is absolutely great! Lots of great info and inspiration, both of which we all need! Also like to admire the time and effort you put into your blog and detailed information you offer! I will bookmark your website!
Ко ланта Ко Ланта На Карте Таиланда: См. “Ко Ланта На Карте”.
piastrix регистрация
vavada casino pl
Posiadanie ziemi w Beskidach zapewnia nie tylko spokoj, ale takze mozliwosc atrakcyjnego zarobku w przyszlosci.
Dzieki rozwijajacej sie infrastrukturze i rosnacemu zainteresowaniu turystow, ceny dzialek stopniowo wzrastaja. Coraz wiecej osob docenia spokoj i piekno przyrody, jakie oferuja Beskidy.
#### **2. Gdzie szukac najlepszych ofert dzialek?**
Wybor odpowiedniej lokalizacji zalezy od indywidualnych potrzeb i budzetu. Najlepsze propozycje mozna znalezc na specjalistycznych serwisach, gdzie dostepne sa dzialki o roznej powierzchni i standardzie.
Przed zakupem nalezy dokladnie przeanalizowac dostepnosc mediow i warunki zabudowy. Wazne jest, aby sprawdzic, czy dzialka ma dostep do wody i pradu, co wplywa na wygode uzytkowania.
#### **3. Jakie korzysci daje posiadanie dzialki w Beskidach?**
Nieruchomosc w gorach to nie tylko inwestycja finansowa, ale rowniez szansa na poprawe jakosci zycia. Mozna tu zbudowac dom letniskowy i cieszyc sie urokami przyrody przez caly rok.
Dodatkowo, region ten oferuje wiele atrakcji, takich jak szlaki turystyczne i stoki narciarskie. Wlasciciele dzialek moga korzystac z licznych festiwali i wydarzen kulturalnych organizowanych w regionie.
#### **4. Jak przygotowac sie do zakupu dzialki?**
Przed podjeciem decyzji warto skonsultowac sie z prawnikiem i geodeta. Wizyta na miejscu i rozmowa z sasiadami moga dostarczyc cennych informacji o okolicy.
Wazne jest rowniez okreslenie swojego budzetu i planow zwiazanych z zagospodarowaniem terenu. Warto rozwazyc wszystkie opcje, aby wybrac najlepsza dla siebie mozliwosc.
—
### **Szablon Spinu**
**1. Dlaczego warto kupic dzialke w Beskidach?**
– Malownicze krajobrazy Beskidow przyciagaja zarowno turystow, jak i przyszlych mieszkancow.
– Dzieki rozwojowi infrastruktury, tereny te staja sie jeszcze bardziej atrakcyjne.
**2. Gdzie szukac najlepszych ofert dzialek?**
– Profesjonalne agencje nieruchomosci czesto oferuja najlepsze propozycje w regionie.
– Przed zakupem nalezy zweryfikowac dostepnosc mediow i mozliwosci zabudowy.
**3. Jakie korzysci daje posiadanie dzialki w Beskidach?**
– Wlasny kawalek gorskiej przestrzeni pozwala na ucieczke od miejskiego zgielku.
– Coraz wiecej osob docenia walory turystyczne i rekreacyjne Beskidow.
**4. Jak przygotowac sie do zakupu dzialki?**
– Wazne jest zasiegniecie porady prawnej przed podpisaniem umowy.
– Rozmowa z dotychczasowymi wlascicielami moze dostarczyc cennych informacji.
uniquegiftcorner – Creative and thoughtful gift ideas, ideal for any occasion.
пиастрикс вход
https://b2best.at
everydayvaluezone – Great deals and simple navigation, really makes shopping effortless.
trendandbuy – Awesome spot for trendy finds, love browsing the latest styles.
trendloversplace – Perfect for trend enthusiasts, always something fresh and exciting to see.
Je suis completement seduit par Azur Casino, il propose une aventure palpitante. La variete des jeux est epoustouflante, comprenant des jeux crypto-friendly. Avec des transactions rapides. Le service est disponible 24/7. Les paiements sont surs et efficaces, par ailleurs des offres plus importantes seraient super. En fin de compte, Azur Casino vaut une visite excitante. En complement la navigation est fluide et facile, donne envie de continuer l’aventure. Un plus les tournois reguliers pour s’amuser, qui stimule l’engagement.
Explorer maintenant|
Автоматизация повышает эффективность кракен onion кракен darknet кракен onion кракен ссылка onion
https://bs2-bs2web.at
как сделать кошелек пиастрикс
modernstylecorner – Sleek and contemporary selections, perfect for style-conscious shoppers.
Most often since i look for a blog Document realize that the vast majority of blog pages happen to be amateurish. Not so,We can honestly claim for which you writen is definitely great and then your webpage rock solid.
Beneficial Blog! I had been simply just debating that there are plenty of screwy results at this issue you now purely replaced my personal belief. Thank you an excellent write-up.
vavada casino pl
Posiadanie ziemi w Beskidach zapewnia nie tylko spokoj, ale takze mozliwosc atrakcyjnego zarobku w przyszlosci.
Dzieki rozwijajacej sie infrastrukturze i rosnacemu zainteresowaniu turystow, ceny dzialek stopniowo wzrastaja. Coraz wiecej osob docenia spokoj i piekno przyrody, jakie oferuja Beskidy.
#### **2. Gdzie szukac najlepszych ofert dzialek?**
Wybor odpowiedniej lokalizacji zalezy od indywidualnych potrzeb i budzetu. Warto sprawdzic profesjonalne strony internetowe, takie jak dzialki-beskidy.pl, ktore prezentuja sprawdzone oferty.
Przed zakupem nalezy dokladnie przeanalizowac dostepnosc mediow i warunki zabudowy. Wiele ofert zawiera szczegolowe informacje o mozliwosciach zagospodarowania terenu, co ulatwia podjecie decyzji.
#### **3. Jakie korzysci daje posiadanie dzialki w Beskidach?**
Nieruchomosc w gorach to nie tylko inwestycja finansowa, ale rowniez szansa na poprawe jakosci zycia. Mozna tu zbudowac dom letniskowy i cieszyc sie urokami przyrody przez caly rok.
Dodatkowo, region ten oferuje wiele atrakcji, takich jak szlaki turystyczne i stoki narciarskie. Coraz wiecej osob wybiera te lokalizacje ze wzgledu na dobrze rozwinieta baze rekreacyjna.
#### **4. Jak przygotowac sie do zakupu dzialki?**
Przed podjeciem decyzji warto skonsultowac sie z prawnikiem i geodeta. Wizyta na miejscu i rozmowa z sasiadami moga dostarczyc cennych informacji o okolicy.
Wazne jest rowniez okreslenie swojego budzetu i planow zwiazanych z zagospodarowaniem terenu. Wiele osob decyduje sie na kredyt, aby sfinansowac zakup wymarzonej dzialki.
—
### **Szablon Spinu**
**1. Dlaczego warto kupic dzialke w Beskidach?**
– Malownicze krajobrazy Beskidow przyciagaja zarowno turystow, jak i przyszlych mieszkancow.
– Dzialki w Beskidach to coraz czesciej wybierana lokata kapitalu przez swiadomych inwestorow.
**2. Gdzie szukac najlepszych ofert dzialek?**
– Profesjonalne agencje nieruchomosci czesto oferuja najlepsze propozycje w regionie.
– Kluczowe jest sprawdzenie, czy dzialka ma wszystkie niezbedne pozwolenia.
**3. Jakie korzysci daje posiadanie dzialki w Beskidach?**
– Dzialka w Beskidach moze stac sie zrodlem dodatkowego dochodu dzieki wynajmowaniu turystom.
– Coraz wiecej osob docenia walory turystyczne i rekreacyjne Beskidow.
**4. Jak przygotowac sie do zakupu dzialki?**
– Warto dokladnie sprawdzic historie dzialki, aby upewnic sie, ze nie ma zadnych roszczen.
– Niektore oferty umozliwiaja elastyczne formy platnosci, co moze byc korzystne.
trendandbuy – Awesome spot for trendy finds, love browsing the latest styles.
промокоды на сегодня
purefashionchoice – Clean, stylish fashion selections that are both modern and practical.
believeinyourdreams – Truly motivating theme, I love the positivity this site spreads.
valor bet casino valor bet casino .
ко ланта Экскурсии На Ко Ланте: См. “Ко Ланта Экскурсии”. Забронируйте экскурсию заранее, чтобы не пропустить самые интересные места и развлечения на острове.
brightcollectionhub – Love the name—it perfectly matches the bright, modern selections here.
пиастрикс регистрация
1 xbet http://www.1xbet-7.com/ .
перепланировка помещения перепланировка помещения .
surewin casino http://surewin-online.com/ .
beep beep kasyno http://www.beepbeepcasino-online.com/ .
globalvaluecorner – Amazing value and variety of products from around the world.
https://bsme-at.at
Приватность данных становится роскошью kraken ссылка зеркало kraken актуальные ссылки kraken зеркало kraken ссылка зеркало
modernshoppingcorner – Modern design, easy shopping flow, and great product selection.
advista.click – Navigation felt smooth, found everything quickly without any confusing steps.
Solv Klarbit
believeandachieve – Positive and motivational content, perfect for personal growth seekers.
Clarte Nexive
Clarte Nexive se differencie comme une plateforme d’investissement crypto revolutionnaire, qui met a profit la puissance de l’intelligence artificielle pour fournir a ses clients des avantages concurrentiels decisifs.
Son IA analyse les marches en temps reel, identifie les opportunites et execute des strategies complexes avec une finesse et une celerite inaccessibles aux traders humains, augmentant de ce fait les potentiels de rendement.
dreamfashionfinds – Love the variety—something for every style and taste.
бездепозитный бонус фриспины за регистрацию
everydayessentials – Convenient site to find daily essentials quickly and easily.
trendandfashion – My go-to place for discovering new looks and fashion inspiration.
growthflow.click – Mobile version looks perfect; no glitches, fast scrolling, crisp text.
freshcollectionhub – Fresh products, great presentation, and a fun browsing experience.
бездепозитный бонус за регистрацию без отыгрыша
vavada casino pl
Inwestycja w dzialke w tym regionie to doskonaly sposob na polaczenie przyjemnego z pozytecznym.
Dzieki rozwijajacej sie infrastrukturze i rosnacemu zainteresowaniu turystow, ceny dzialek stopniowo wzrastaja. Coraz wiecej osob docenia spokoj i piekno przyrody, jakie oferuja Beskidy.
#### **2. Gdzie szukac najlepszych ofert dzialek?**
Wybor odpowiedniej lokalizacji zalezy od indywidualnych potrzeb i budzetu. Portal dzialki-beskidy.pl oferuje szeroki wybor nieruchomosci w roznych cenach.
Przed zakupem nalezy dokladnie przeanalizowac dostepnosc mediow i warunki zabudowy. Wiele ofert zawiera szczegolowe informacje o mozliwosciach zagospodarowania terenu, co ulatwia podjecie decyzji.
#### **3. Jakie korzysci daje posiadanie dzialki w Beskidach?**
Nieruchomosc w gorach to nie tylko inwestycja finansowa, ale rowniez szansa na poprawe jakosci zycia. Dzialka w Beskidach moze stac sie zrodlem dochodu, jesli zdecydujemy sie na wynajem turystom.
Dodatkowo, region ten oferuje wiele atrakcji, takich jak szlaki turystyczne i stoki narciarskie. Wlasciciele dzialek moga korzystac z licznych festiwali i wydarzen kulturalnych organizowanych w regionie.
#### **4. Jak przygotowac sie do zakupu dzialki?**
Przed podjeciem decyzji warto skonsultowac sie z prawnikiem i geodeta. Profesjonalna pomoc pozwoli uniknac nieprzyjemnych niespodzianek zwiazanych z formalnosciami.
Wazne jest rowniez okreslenie swojego budzetu i planow zwiazanych z zagospodarowaniem terenu. Niektore oferty pozwalaja na rozlozenie platnosci, co ulatwia inwestycje.
—
### **Szablon Spinu**
**1. Dlaczego warto kupic dzialke w Beskidach?**
– Inwestowanie w dzialki w tym regionie to swietny sposob na zabezpieczenie finansowej przyszlosci.
– Dzieki rozwojowi infrastruktury, tereny te staja sie jeszcze bardziej atrakcyjne.
**2. Gdzie szukac najlepszych ofert dzialek?**
– Dobrym rozwiazaniem jest skorzystanie ze sprawdzonych stron internetowych, takich jak dzialki-beskidy.pl.
– Przed zakupem nalezy zweryfikowac dostepnosc mediow i mozliwosci zabudowy.
**3. Jakie korzysci daje posiadanie dzialki w Beskidach?**
– Dzialka w Beskidach moze stac sie zrodlem dodatkowego dochodu dzieki wynajmowaniu turystom.
– Region oferuje wiele aktywnosci, od wedrowek po gorach po jazde na nartach.
**4. Jak przygotowac sie do zakupu dzialki?**
– Wazne jest zasiegniecie porady prawnej przed podpisaniem umowy.
– Niektore oferty umozliwiaja elastyczne formy platnosci, co moze byc korzystne.
Je suis enthousiasme par Lucky 31 Casino, c’est une plateforme qui pulse avec energie. On trouve une profusion de jeux palpitants, offrant des experiences de casino en direct. Avec des depots rapides et faciles. Le support est fiable et reactif. Les retraits sont ultra-rapides, quelquefois des offres plus consequentes seraient parfaites. Pour finir, Lucky 31 Casino merite une visite dynamique. D’ailleurs le site est fluide et attractif, permet une plongee totale dans le jeu. Un avantage les nombreuses options de paris sportifs, propose des privileges sur mesure.
Aller Г la page|
J’ai une passion debordante pour Azur Casino, c’est une plateforme qui deborde de dynamisme. Le choix est aussi large qu’un festival, incluant des paris sportifs pleins de vie. Le bonus d’inscription est attrayant. Le suivi est d’une precision remarquable. Les gains arrivent en un eclair, par moments des bonus varies rendraient le tout plus fun. Globalement, Azur Casino est un choix parfait pour les joueurs. En extra l’interface est fluide comme une soiree, booste l’excitation du jeu. Un atout les options de paris sportifs diversifiees, offre des recompenses regulieres.
http://www.azurcasinoappfr.com|
classystylemarket – Love the refined styles here, everything feels premium.
trendworldmarket – Perfect site for discovering fresh and exciting products.
Роботы становятся частью общества kraken onion kraken актуальные ссылки kraken зеркало kraken ссылка зеркало
buildyourownfuture – Great place to find inspiration for personal growth and progress.
How come you do not have your website viewable in mobile format? cant see anything in my Droid.
globalfindsoutlet – The product variety is impressive—worth checking frequently.
J’ai une affection particuliere pour Action Casino, il propose une aventure palpitante. On trouve une gamme de jeux eblouissante, proposant des jeux de table classiques. 100% jusqu’a 500 € + tours gratuits. Disponible a toute heure via chat ou email. Le processus est transparent et rapide, bien que des bonus plus varies seraient un plus. En fin de compte, Action Casino est un incontournable pour les joueurs. Pour completer la plateforme est visuellement vibrante, incite a rester plus longtemps. Egalement top le programme VIP avec des avantages uniques, qui booste la participation.
Parcourir le site|
You are my inspiration , I possess few web logs and very sporadically run out from to brand 🙁
Je ne me lasse pas de Lucky 31 Casino, ca donne une vibe electrisante. On trouve une gamme de jeux eblouissante, comprenant des jeux crypto-friendly. Il offre un coup de pouce allechant. Le service d’assistance est au point. Le processus est clair et efficace, par contre des offres plus genereuses seraient top. En resume, Lucky 31 Casino garantit un plaisir constant. En complement le design est moderne et energique, permet une immersion complete. A noter le programme VIP avec des avantages uniques, propose des privileges personnalises.
Visiter la plateforme|
Je suis fascine par 1xBet Casino, on y trouve une energie contagieuse. Les options de jeu sont infinies, avec des slots aux graphismes modernes. Le bonus initial est super. Disponible 24/7 pour toute question. Les gains sont verses sans attendre, cependant plus de promos regulieres dynamiseraient le jeu. Pour conclure, 1xBet Casino est une plateforme qui pulse. En extra le site est fluide et attractif, ce qui rend chaque partie plus fun. Particulierement interessant le programme VIP avec des niveaux exclusifs, propose des privileges personnalises.
Obtenir des infos|
бездепозитный бонус слоты
Je suis emerveille par Action Casino, il cree une experience captivante. Les options de jeu sont incroyablement variees, proposant des jeux de table classiques. Il offre un coup de pouce allechant. Les agents sont toujours la pour aider. Les gains sont verses sans attendre, rarement des recompenses supplementaires seraient parfaites. Globalement, Action Casino offre une aventure inoubliable. De plus la navigation est intuitive et lisse, ajoute une vibe electrisante. Un atout le programme VIP avec des recompenses exclusives, garantit des paiements securises.
Explorer maintenant|
Je suis emerveille par Lucky 31 Casino, ca transporte dans un univers de plaisirs. Il y a une abondance de jeux excitants, avec des slots aux designs captivants. Il donne un avantage immediat. Le suivi est d’une precision remarquable. Le processus est fluide et intuitif, par moments des bonus diversifies seraient un atout. Au final, Lucky 31 Casino vaut une visite excitante. En extra le design est moderne et attrayant, permet une plongee totale dans le jeu. Egalement top le programme VIP avec des recompenses exclusives, qui booste la participation.
Aller voir|
valor de fichas de casino por color http://www.valorslots.com .
findnewhorizons – A wonderful reminder to explore, grow, and discover new opportunities.
Je suis bluffe par Action Casino, ca offre un plaisir vibrant. Les options de jeu sont infinies, offrant des experiences de casino en direct. Avec des depots instantanes. Les agents repondent avec rapidite. Les paiements sont surs et fluides, de temps en temps des bonus varies rendraient le tout plus fun. Pour finir, Action Casino est une plateforme qui fait vibrer. A signaler l’interface est fluide comme une soiree, ce qui rend chaque partie plus fun. A noter les paiements securises en crypto, propose des privileges personnalises.
Apprendre les dГ©tails|
dailydealsplace – Always updated with great bargains, love checking in daily.
Makes sense to me.
1xbet ?yelik https://1xbet-7.com .
trendandbuy – Trendy items at good prices, always up to date with new arrivals.
заказать перепланировку soglasovanie-pereplanirovki-1.ru .
https://b2best.at
sure win online casino http://www.surewin-online.com .
Безопасность данных — приоритет №1 kraken зеркало рабочее kraken darknet market kraken darknet ссылка сайт kraken darknet
beep beep casino вход beepbeepcasino-online.com .
Ко ланта Подводный мир Ко Ланта: рай для дайверов. Теплые воды Андаманского моря делают Ко Ланта идеальным местом для дайвинга и снорклинга в Таиланде. Богатый подводный мир с коралловыми рифами, рыбами и пещерами привлекает дайверов. Близлежащие острова, такие как Ко Ха Яй и Ко Рок, предлагают отличные места для погружений. Ко Ха Яй известен подводными пещерами и арками, а Ко Рок — нетронутыми рифами и чистой водой с тропическими рыбами и черепахами. Недалеко от Ко Ланта находятся скалы Hin Daeng и Hin Muang, популярные среди дайверов, где можно увидеть мант и китовых акул. Для новичков есть дайвинг-центры с курсами PADI Open Water до Divemaster. Опытные инструкторы помогут освоить дайвинг и безопасно исследовать подводный мир. Любители снорклинга также могут насладиться красотой коралловых рифов и морской жизнью.
budgetfriendlyhub – Great variety of affordable options without sacrificing style or quality.
While this issue can vexed most people, my thought is that there has to be a middle or common ground that we all can find. I do value that you’ve added pertinent and sound commentary here though. Thank you!
J’ai une passion debordante pour Lucky 31 Casino, ca transporte dans un monde d’excitation. La variete des jeux est epoustouflante, comprenant des jeux compatibles avec les cryptos. Il amplifie le plaisir des l’entree. Disponible 24/7 pour toute question. Le processus est transparent et rapide, mais des offres plus consequentes seraient parfaites. Pour conclure, Lucky 31 Casino vaut une visite excitante. De surcroit le design est moderne et energique, ce qui rend chaque partie plus fun. Particulierement interessant les options de paris sportifs diversifiees, propose des privileges sur mesure.
VГ©rifier le site|
https://ultimatecapper.com/roulettino-germany-a-full-review-for-betting-fans-stat-analysts-and-predictive-model-enthusiasts-215886/
I wish I could craft such articles as this. Thank you very much.
Je suis bluffe par Azur Casino, il propose une aventure palpitante. Les jeux proposes sont d’une diversite folle, offrant des sessions live immersives. Il donne un elan excitant. Le service client est excellent. Les paiements sont securises et instantanes, malgre tout quelques tours gratuits supplementaires seraient cool. Globalement, Azur Casino offre une aventure memorable. D’ailleurs la navigation est simple et intuitive, permet une plongee totale dans le jeu. Un bonus les paiements securises en crypto, assure des transactions fiables.
https://azurcasino365fr.com/|
Je suis captive par Azur Casino, ca donne une vibe electrisante. Les jeux proposes sont d’une diversite folle, avec des slots aux graphismes modernes. Avec des depots fluides. Le suivi est impeccable. Les gains sont verses sans attendre, toutefois des offres plus consequentes seraient parfaites. Pour conclure, Azur Casino offre une experience inoubliable. Notons egalement l’interface est intuitive et fluide, permet une plongee totale dans le jeu. Particulierement interessant les transactions en crypto fiables, garantit des paiements securises.
Rejoindre maintenant|
I dont think Ive caught all the angles of this subject the way youve pointed them out. Youre a true star, a rock star man. Youve got so much to say and know so much about the subject that I think you should just teach a class about it
learncreategrow – Inspiring content that encourages learning, creating, and personal growth.
Je suis fascine par 1xBet Casino, on ressent une ambiance de fete. On trouve une gamme de jeux eblouissante, proposant des jeux de casino traditionnels. Il booste votre aventure des le depart. Le support client est irreprochable. Les paiements sont surs et efficaces, malgre tout des offres plus genereuses rendraient l’experience meilleure. Dans l’ensemble, 1xBet Casino est un must pour les passionnes. Notons egalement la navigation est intuitive et lisse, booste l’excitation du jeu. Egalement excellent les options variees pour les paris sportifs, garantit des paiements rapides.
Trouver les dГ©tails|
Je suis enthousiaste a propos de Lucky 31 Casino, il offre une experience dynamique. Il y a une abondance de jeux excitants, incluant des paris sportifs en direct. Il donne un elan excitant. Les agents repondent avec efficacite. Les transactions sont toujours securisees, de temps a autre des recompenses additionnelles seraient ideales. Pour finir, Lucky 31 Casino vaut une exploration vibrante. De plus le site est rapide et immersif, facilite une immersion totale. Un avantage notable le programme VIP avec des privileges speciaux, renforce le lien communautaire.
http://www.casinolucky31fr.com|
Je suis sous le charme de 1xBet Casino, il cree un monde de sensations fortes. La bibliotheque de jeux est captivante, avec des slots aux graphismes modernes. Il donne un avantage immediat. Le service client est de qualite. Le processus est clair et efficace, par ailleurs plus de promotions frequentes boosteraient l’experience. Pour finir, 1xBet Casino vaut une visite excitante. A mentionner la navigation est simple et intuitive, apporte une touche d’excitation. Un point fort les evenements communautaires vibrants, offre des recompenses regulieres.
Aller plus loin|
Je suis sous le charme de Action Casino, ca offre un plaisir vibrant. La bibliotheque est pleine de surprises, avec des machines a sous visuellement superbes. Avec des depots rapides et faciles. Le service est disponible 24/7. Les transactions sont toujours securisees, neanmoins des offres plus genereuses seraient top. En somme, Action Casino offre une aventure memorable. En plus la plateforme est visuellement dynamique, facilite une immersion totale. Un avantage les paiements securises en crypto, offre des recompenses regulieres.
Aller au site|
J’adore l’energie de Lucky 31 Casino, ca offre un plaisir vibrant. Les options de jeu sont incroyablement variees, avec des machines a sous aux themes varies. Il rend le debut de l’aventure palpitant. Le support est fiable et reactif. Les gains arrivent sans delai, rarement des bonus varies rendraient le tout plus fun. Au final, Lucky 31 Casino vaut une visite excitante. A souligner le design est style et moderne, amplifie le plaisir de jouer. Particulierement fun le programme VIP avec des privileges speciaux, propose des avantages sur mesure.
DГ©marrer maintenant|
classystyleoutlet – Love the elegant yet accessible fashion choices available here.
Je suis captive par Action Casino, il cree un monde de sensations fortes. Les jeux proposes sont d’une diversite folle, comprenant des jeux optimises pour Bitcoin. 100% jusqu’a 500 € + tours gratuits. Le support client est irreprochable. Les transactions sont toujours securisees, parfois des bonus varies rendraient le tout plus fun. En resume, Action Casino est un choix parfait pour les joueurs. A souligner la navigation est fluide et facile, apporte une touche d’excitation. Egalement super le programme VIP avec des privileges speciaux, assure des transactions fluides.
https://casinoactionappfr.com/|
Современные решения делают бизнес гибким kraken ссылка зеркало кракен darknet кракен onion кракен ссылка onion
J’ai une passion debordante pour Azur Casino, ca offre une experience immersive. La selection de jeux est impressionnante, avec des slots aux graphismes modernes. Avec des depots instantanes. Le service est disponible 24/7. Les paiements sont securises et rapides, cependant quelques tours gratuits supplementaires seraient cool. En somme, Azur Casino est une plateforme qui fait vibrer. Pour completer la navigation est fluide et facile, permet une plongee totale dans le jeu. A noter les tournois frequents pour l’adrenaline, propose des avantages uniques.
}
сайт
водка бет регистрация
growtogetherstrong – Positive and motivating, perfect for teamwork and community growth.
brightfashionhub – Browsing felt fun and smooth, with helpful suggestions on every section.
growtogethercommunity – Found some new perspectives here that helped shift my mindset today.
These are some of the most important issues we’ll face over the next few decades.
exploreopportunityzone – Excellent motivational content, helps me think bigger and act smarter.
Алгоритмы управляют современным миром kraken ссылка на сайт кракен онион тор кракен онион зеркало кракен даркнет маркет
fashionchoicehub – Loved the fresh style ideas here, everything felt trendy and inspiring.
findnewdeals – Loved how simple it was to browse deals without feeling overwhelmed.
bestbuycollection – Overall a reliable place to explore products without feeling rushed or confused.
findnewhorizons – The site felt calm and inspiring, perfect for clearing my mind today.
buildyourownfuture – Great motivational site, helps focus on goals and planning ahead.
Источник
vodka casino
classystylemarket – Stylish products with great prices, love the classy layout of this site.
https://b2best.at
Роботы становятся частью общества сайт kraken darknet kraken darknet market kraken darknet ссылка сайт kraken darknet
This article actually helped me with a report I was doing.
интернет
водка бет
dreamdiscovercreate – Truly inspiring space that encourages creativity and following your dreams.
юристы онлайн консультация бесплатно Юрист онлайн консультация бесплатно В современном мире, где правовые вопросы возникают постоянно, возможность получить оперативную и квалифицированную юридическую помощь онлайн становится необходимостью. Бесплатная онлайн консультация юриста – это шанс быстро оценить ситуацию, понять перспективы дела и получить рекомендации по дальнейшим действиям. Это особенно ценно, когда время не терпит, и требуется срочный совет.
creativegiftoutlet – Amazing gift ideas, really unique and thoughtful selections available here.
Ko Lanta Национальный парк Му Ко Ланта: Встреча с дикой природой. Национальный парк Му Ко Ланта находится на юге Ко Ланта Яй, это настоящее сокровище природы, где можно увидеть тропические леса и прибрежные пейзажи в их первозданном виде. В этом заповеднике живут разные животные и растения, включая обезьян, птиц, рептилий и бабочек. Главная достопримечательность парка – маяк, стоящий на скалистом мысе Kip Nai. Поднявшись на маяк, можно увидеть красивые панорамы Андаманского моря и соседних островов. Пешеходные тропы через джунгли позволяют изучить парк и его экосистему. Одна из популярных троп ведет к двум уединенным пляжам – Tai Note Beach и Ao Chak Beach – где можно отдохнуть и искупаться в чистой воде. Национальный парк Му Ко Ланта – это не только природа, но и история. Здесь можно увидеть древние захоронения морских цыган (Chao Leh), коренных жителей острова, которые веками жили в гармонии с природой.
каталог
водкабет играть сейчас
Интернет объединяет поколения кракен онион зеркало kraken зеркало рабочее актуальные зеркала kraken kraken сайт зеркала
shopforvalue – Affordable products without compromising quality, makes shopping super satisfying.
Ко ланта Lanta Old Town: путешествие сквозь века – переосмысление. Старый город Ланта, расположенный на восточном побережье Ко Ланта Яй, является историческим центром острова. Он позволит окунуться в прошлое и увидеть историю, которая оставила отпечаток на Ко Ланте. Этот город с деревянными домами на сваях, когда-то был важным торговым портом. Сегодня Старый город привлекает туристов атмосферой старины и архитектурой того времени. Прогуливаясь по улочкам, можно увидеть деревянные дома, украшенные резьбой и цветами. В небольших магазинах продаются ремесленные изделия, сувениры и местные продукты. В Старом городе есть гестхаусы и рестораны, где можно попробовать тайские блюда и морепродукты. Отсюда открывается вид на Андаманское море.
Помогу продать земельный участок. Помогу купить участок в Нижегородской области Нижегородская область, с ее бескрайними полями, живописными лесами и богатым культурным наследием, манит возможностью обустроить собственный уголок, вдали от городской суеты. Мечтаете о просторном участке для строительства дома, дачи или фермерского хозяйства? Я, как опытный эксперт в сфере недвижимости Нижегородской области, помогу вам реализовать эту мечту. Тщательный подбор участков, соответствующих вашим запросам по местоположению, площади, коммуникациям и бюджету. Полное юридическое сопровождение сделки, от проверки документов до оформления прав собственности. Сделайте первый шаг к жизни на своей земле!
vavada casino pl
Inwestycja w dzialke w tym regionie to doskonaly sposob na polaczenie przyjemnego z pozytecznym.
Dzieki rozwijajacej sie infrastrukturze i rosnacemu zainteresowaniu turystow, ceny dzialek stopniowo wzrastaja. Coraz wiecej osob docenia spokoj i piekno przyrody, jakie oferuja Beskidy.
#### **2. Gdzie szukac najlepszych ofert dzialek?**
Wybor odpowiedniej lokalizacji zalezy od indywidualnych potrzeb i budzetu. Portal dzialki-beskidy.pl oferuje szeroki wybor nieruchomosci w roznych cenach.
Przed zakupem nalezy dokladnie przeanalizowac dostepnosc mediow i warunki zabudowy. Niektore tereny wymagaja dodatkowych formalnosci, dlatego warto skorzystac z pomocy ekspertow.
#### **3. Jakie korzysci daje posiadanie dzialki w Beskidach?**
Nieruchomosc w gorach to nie tylko inwestycja finansowa, ale rowniez szansa na poprawe jakosci zycia. Mozna tu zbudowac dom letniskowy i cieszyc sie urokami przyrody przez caly rok.
Dodatkowo, region ten oferuje wiele atrakcji, takich jak szlaki turystyczne i stoki narciarskie. Wlasciciele dzialek moga korzystac z licznych festiwali i wydarzen kulturalnych organizowanych w regionie.
#### **4. Jak przygotowac sie do zakupu dzialki?**
Przed podjeciem decyzji warto skonsultowac sie z prawnikiem i geodeta. Wizyta na miejscu i rozmowa z sasiadami moga dostarczyc cennych informacji o okolicy.
Wazne jest rowniez okreslenie swojego budzetu i planow zwiazanych z zagospodarowaniem terenu. Wiele osob decyduje sie na kredyt, aby sfinansowac zakup wymarzonej dzialki.
—
### **Szablon Spinu**
**1. Dlaczego warto kupic dzialke w Beskidach?**
– Beskidy to idealne miejsce dla osob szukajacych spokoju i bliskosci natury.
– Dzialki w Beskidach to coraz czesciej wybierana lokata kapitalu przez swiadomych inwestorow.
**2. Gdzie szukac najlepszych ofert dzialek?**
– Profesjonalne agencje nieruchomosci czesto oferuja najlepsze propozycje w regionie.
– Przed zakupem nalezy zweryfikowac dostepnosc mediow i mozliwosci zabudowy.
**3. Jakie korzysci daje posiadanie dzialki w Beskidach?**
– Wlasny kawalek gorskiej przestrzeni pozwala na ucieczke od miejskiego zgielku.
– Region oferuje wiele aktywnosci, od wedrowek po gorach po jazde na nartach.
**4. Jak przygotowac sie do zakupu dzialki?**
– Wazne jest zasiegniecie porady prawnej przed podpisaniem umowy.
– Niektore oferty umozliwiaja elastyczne formy platnosci, co moze byc korzystne.
онлайн юридическая консультация бесплатно Юридическая консультация: бесплатный или платный вариант? Разобраться, какой вариант консультации подходит именно вам, — это важный шаг. Бесплатная консультация — это отличный способ получить общее представление о проблеме и оценить перспективы дела. Если же вам требуется более глубокий анализ и индивидуальный подход, платная консультация станет разумным вложением в защиту ваших прав и интересов.
Казино 7k показало себя с лучшей стороны. Никаких задержек и сложных проверок. Деньги пришли быстро, сервис достойный https://potolki-excludar.ru/ru-ru/
Помогу купить участок в Нижегородской области Купить дом в Нижегородской области Нижегородская область – прекрасное место для жизни вдали от городской суеты, в окружении природы и спокойствия. Хотите купить дом в Нижегородской области? Я помогу вам найти дом вашей мечты, учитывая ваши предпочтения по площади, планировке, местоположению и бюджету. Полный спектр услуг: от подбора вариантов до юридического оформления сделки. Надежный партнер в поиске вашего идеального дома.
Мир переходит на цифровые рельсы kraken ссылка зеркало kraken рабочая ссылка onion сайт kraken onion kraken darknet
heaps of wins heaps of wins .
продвижение обучение https://kursy-seo-12.ru/ .
goliath casino app http://www.goliath-casino.com .
ice bet ice bet .
J’adore le dynamisme de Azur Casino, on ressent une ambiance de fete. Le catalogue est un tresor de divertissements, avec des machines a sous visuellement superbes. Le bonus de bienvenue est genereux. Le service client est excellent. Les retraits sont simples et rapides, occasionnellement des bonus diversifies seraient un atout. Pour finir, Azur Casino offre une experience hors du commun. Pour completer le design est style et moderne, booste l’excitation du jeu. A souligner le programme VIP avec des recompenses exclusives, qui motive les joueurs.
Cliquer maintenant|
findamazingoffers – Excellent deals and diverse products, makes shopping super satisfying.
growbeyondlimits – Encouraging platform that inspires personal growth and pushing boundaries every day.
юрист бесплатная консультация онлайн Бесплатная юридическая консультация онлайн Воспользуйтесь уникальной возможностью получить бесплатную юридическую консультацию, не рискуя своими финансами. Это идеальный вариант для тех, кто хочет разобраться в своих правах и обязанностях, получить общее представление о проблеме и определить дальнейший план действий.
Будущее за искусственным интеллектом кракен onion сайт kraken зеркало рабочее актуальные зеркала kraken kraken сайт зеркала
Motivation & Growth Hub – Came across an idea that inspired me to take small steps forward.
Spot the Trends Portal – Unique products stood out, shopping was fun and quick.
I just added your web site to my blogroll, I hope you would look at doing the same.
findamazingoffers – Excellent deals and diverse products, makes shopping super satisfying.
Je suis fascine par Azur Casino, ca transporte dans un monde d’excitation. Le choix est aussi large qu’un festival, offrant des experiences de casino en direct. 100% jusqu’a 500 € + tours gratuits. Les agents sont rapides et pros. Les gains arrivent sans delai, par contre des offres plus importantes seraient super. En conclusion, Azur Casino merite un detour palpitant. Ajoutons aussi l’interface est fluide comme une soiree, amplifie le plaisir de jouer. Un avantage les evenements communautaires pleins d’energie, offre des recompenses regulieres.
Aller au site|
trendyvaluezone – Found some cool picks here that I didn’t expect to like.
changeyourmindset – This place always gives me something thoughtful to reflect on daily.
Je suis enthousiasme par Lucky 31 Casino, on y trouve une vibe envoutante. La bibliotheque de jeux est captivante, incluant des options de paris sportifs dynamiques. Il rend le debut de l’aventure palpitant. Le service client est de qualite. Les gains sont transferes rapidement, mais des recompenses supplementaires dynamiseraient le tout. En fin de compte, Lucky 31 Casino merite un detour palpitant. A noter la plateforme est visuellement electrisante, ajoute une vibe electrisante. Egalement genial les evenements communautaires vibrants, propose des privileges personnalises.
Entrer sur le site|
займ на карту казахстан
J’ai un faible pour Azur Casino, ca invite a plonger dans le fun. Les options sont aussi vastes qu’un horizon, offrant des experiences de casino en direct. Il propulse votre jeu des le debut. Disponible a toute heure via chat ou email. Les retraits sont ultra-rapides, rarement quelques free spins en plus seraient bienvenus. En bref, Azur Casino garantit un plaisir constant. Ajoutons aussi la navigation est simple et intuitive, apporte une energie supplementaire. Particulierement cool les evenements communautaires pleins d’energie, offre des bonus constants.
Lire la suite|
Daily Bargain Spot – Consistently find great deals, new offers every day.
NT Breaking News – Breaking updates ka style bohot clean aur understandable hai.
Je suis completement seduit par Action Casino, ca offre un plaisir vibrant. La variete des jeux est epoustouflante, incluant des paris sportifs pleins de vie. Il offre un demarrage en fanfare. Les agents sont toujours la pour aider. Les gains arrivent sans delai, de temps a autre plus de promotions variees ajouteraient du fun. En bref, Action Casino est un incontournable pour les joueurs. En extra le design est tendance et accrocheur, ce qui rend chaque session plus palpitante. Egalement top les options de paris sportifs diversifiees, propose des privileges personnalises.
Visiter en ligne|
Je suis accro a 1xBet Casino, on ressent une ambiance de fete. Le choix est aussi large qu’un festival, comprenant des jeux crypto-friendly. 100% jusqu’a 500 € avec des spins gratuits. Le service d’assistance est au point. Les transactions sont fiables et efficaces, neanmoins des bonus plus varies seraient un plus. Pour finir, 1xBet Casino assure un divertissement non-stop. Ajoutons aussi le site est fluide et attractif, incite a rester plus longtemps. Egalement excellent les tournois frequents pour l’adrenaline, qui motive les joueurs.
Explorer maintenant|
Je suis captive par Lucky 31 Casino, on ressent une ambiance de fete. Les options de jeu sont infinies, avec des machines a sous aux themes varies. Il propulse votre jeu des le debut. Le support est fiable et reactif. Les gains sont verses sans attendre, occasionnellement des bonus diversifies seraient un atout. Au final, Lucky 31 Casino est un choix parfait pour les joueurs. De surcroit l’interface est lisse et agreable, permet une plongee totale dans le jeu. Particulierement fun les tournois frequents pour l’adrenaline, propose des privileges sur mesure.
DГ©couvrir le web|
Программирование — язык нового поколения kraken ссылка на сайт kraken рабочая ссылка onion сайт kraken onion kraken darknet
discovermoreideas – Found some great creative thoughts here that sparked my morning energy.
dreambuildachieve – Loved how simple the advice felt while still being truly encouraging.
learnsomethingincredible – Browsing felt refreshing, with information presented neatly and thoughtfully.
dreamshopworld – Found some great items today that genuinely caught my attention quickly.
Quick Shop Picks – Found a handy product that made shopping quicker and simpler.
Je suis captive par Lucky 31 Casino, ca donne une vibe electrisante. Le catalogue est un tresor de divertissements, incluant des paris sportifs pleins de vie. Avec des depots fluides. Le service client est de qualite. Les transactions sont fiables et efficaces, quelquefois des offres plus importantes seraient super. En somme, Lucky 31 Casino offre une aventure inoubliable. En extra la navigation est claire et rapide, ajoute une touche de dynamisme. Un avantage les tournois reguliers pour la competition, garantit des paiements rapides.
Rejoindre maintenant|
Высшее качество. Чёткий товар. Мошный микс. Хороший персонал, добрый МАгазин…. https://say.la/read-blog/135220
J’adore le dynamisme de 1xBet Casino, il propose une aventure palpitante. La selection de jeux est impressionnante, avec des machines a sous visuellement superbes. Il offre un coup de pouce allechant. Disponible 24/7 pour toute question. Les transactions sont d’une fiabilite absolue, occasionnellement des offres plus importantes seraient super. Globalement, 1xBet Casino vaut une visite excitante. A souligner le site est fluide et attractif, donne envie de prolonger l’aventure. A noter les evenements communautaires pleins d’energie, offre des recompenses regulieres.
Savoir plus|
J’adore la vibe de Action Casino, on y trouve une vibe envoutante. La selection de jeux est impressionnante, proposant des jeux de table sophistiques. 100% jusqu’a 500 € avec des spins gratuits. Les agents sont rapides et pros. Le processus est transparent et rapide, parfois quelques tours gratuits en plus seraient geniaux. Globalement, Action Casino est un lieu de fun absolu. Pour couronner le tout la navigation est intuitive et lisse, ce qui rend chaque moment plus vibrant. Particulierement cool les transactions en crypto fiables, propose des privileges personnalises.
Voir maintenant|
dreamfashionfinds – Stylish and trendy fashion finds that make everyday shopping fun.
кухни на заказ санкт петербург http://kuhni-spb-10.ru/ .
J’ai une passion debordante pour Action Casino, il offre une experience dynamique. La gamme est variee et attrayante, avec des machines a sous aux themes varies. Le bonus de depart est top. Disponible 24/7 pour toute question. Les gains sont verses sans attendre, par moments des offres plus importantes seraient super. En somme, Action Casino offre une experience hors du commun. En complement le site est rapide et engageant, incite a rester plus longtemps. Un avantage les tournois frequents pour l’adrenaline, propose des avantages sur mesure.
DГ©couvrir davantage|
Trend Discover Hub – Always fresh and exciting, new items keep appearing.
icebet88 icebet88 .
seo специалист seo специалист .
goliath casino recension http://www.goliath-casino.com/ .
юрист онлайн консультация бесплатно без регистрации ответ сразу Юрист онлайн консультация бесплатно В современном ритме жизни, когда скорость и доступность информации ценятся превыше всего, возможность получить квалифицированную юридическую консультацию онлайн бесплатно становится неоценимым преимуществом. Это шанс оперативно оценить ситуацию, понять свои права и обязанности, а также наметить дальнейшие шаги без каких-либо финансовых вложений.
Цифровизация ускоряет экономику кракен даркнет маркет kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
Unique Discoveries Hub – The clean layout helped me explore products without any hassle.
3DАрт Цифровая Скульптура открывает безграничные горизонты для художников, позволяя воплощать самые смелые и сложные идеи в виртуальном пространстве. С использованием специализированного программного обеспечения, скульпторы создают трехмерные модели, которые ранее были немыслимы из-за ограничений традиционных материалов и техник. Эта новая форма искусства сочетает в себе креативность, техническое мастерство и инновационный подход к созданию объектов.
Je suis fascine par Lucky 31 Casino, c’est une plateforme qui pulse avec energie. Les options de jeu sont infinies, avec des slots aux graphismes modernes. Il booste votre aventure des le depart. Le service est disponible 24/7. Les retraits sont simples et rapides, de temps a autre quelques tours gratuits en plus seraient geniaux. En bref, Lucky 31 Casino est un lieu de fun absolu. A souligner le design est style et moderne, ce qui rend chaque partie plus fun. Particulierement fun le programme VIP avec des recompenses exclusives, propose des avantages uniques.
Explorer le site|
Fashion Explorer Hub – Styles feel modern and fresh, keeps shopping fun.
smartbuyplace – Excellent place to find smart deals and quality products efficiently.
Je ne me lasse pas de Azur Casino, ca invite a l’aventure. La bibliotheque est pleine de surprises, proposant des jeux de table sophistiques. Avec des transactions rapides. Le support est efficace et amical. Les retraits sont lisses comme jamais, de temps en temps des offres plus importantes seraient super. En conclusion, Azur Casino assure un fun constant. De plus l’interface est lisse et agreable, incite a prolonger le plaisir. Un element fort les tournois reguliers pour la competition, offre des bonus constants.
Obtenir des infos|
Je suis fascine par Action Casino, c’est une plateforme qui deborde de dynamisme. La selection de jeux est impressionnante, offrant des tables live interactives. Le bonus de bienvenue est genereux. Les agents repondent avec rapidite. Les retraits sont fluides et rapides, cependant quelques tours gratuits supplementaires seraient cool. En somme, Action Casino est un must pour les passionnes. Par ailleurs la navigation est intuitive et lisse, donne envie de prolonger l’aventure. Un atout le programme VIP avec des avantages uniques, offre des bonus exclusifs.
En savoir plus|
J’ai un faible pour 1xBet Casino, c’est une plateforme qui deborde de dynamisme. Le catalogue est un tresor de divertissements, proposant des jeux de casino traditionnels. Avec des depots fluides. Le suivi est d’une fiabilite exemplaire. Les gains arrivent sans delai, toutefois des recompenses supplementaires dynamiseraient le tout. Pour conclure, 1xBet Casino est une plateforme qui pulse. Pour ajouter la plateforme est visuellement vibrante, amplifie le plaisir de jouer. Egalement top les tournois reguliers pour la competition, offre des recompenses continues.
https://1xbetcasino365fr.com/|
J’adore le dynamisme de Lucky 31 Casino, il offre une experience dynamique. Le choix est aussi large qu’un festival, incluant des paris sportifs pleins de vie. Il amplifie le plaisir des l’entree. Le support est fiable et reactif. Les gains arrivent en un eclair, mais encore des bonus plus varies seraient un plus. Au final, Lucky 31 Casino assure un divertissement non-stop. De surcroit l’interface est lisse et agreable, ce qui rend chaque partie plus fun. Un avantage le programme VIP avec des avantages uniques, offre des bonus constants.
Voir le site|
DLPПечать 3D Печать и DLP Печать – два ключевых метода материализации цифровых творений. 3D печать, благодаря разнообразию используемых материалов (от пластика до металла), позволяет создавать крупные объекты, в то время как DLP печать выделяется своей высокой точностью и идеально подходит для изготовления миниатюр и ювелирных изделий.
findhappinessdaily – Uplifting messages and helpful tips that brighten my day instantly.
J’ai une affection particuliere pour Lucky 31 Casino, il cree un monde de sensations fortes. Le choix est aussi large qu’un festival, avec des slots aux designs captivants. Il donne un elan excitant. Le suivi est d’une fiabilite exemplaire. Les retraits sont simples et rapides, occasionnellement plus de promos regulieres dynamiseraient le jeu. En bref, Lucky 31 Casino garantit un plaisir constant. Pour completer l’interface est simple et engageante, donne envie de prolonger l’aventure. Un point fort les competitions regulieres pour plus de fun, renforce la communaute.
Visiter aujourd’hui|
Технологии делают жизнь проще kraken ссылка зеркало kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
Je suis completement seduit par 1xBet Casino, ca invite a l’aventure. Il y a une abondance de jeux excitants, comprenant des jeux optimises pour Bitcoin. Il rend le debut de l’aventure palpitant. Disponible a toute heure via chat ou email. Les gains sont transferes rapidement, neanmoins des recompenses supplementaires seraient parfaites. En fin de compte, 1xBet Casino assure un divertissement non-stop. Ajoutons aussi la plateforme est visuellement vibrante, facilite une experience immersive. Un point fort le programme VIP avec des recompenses exclusives, qui motive les joueurs.
Obtenir plus|
Trend Picks Spot – Discovered fresh styles, the selection felt impressive today.
Shopping Deals Online – Found an item that was perfectly suited for my needs.
Je suis bluffe par Action Casino, on y trouve une vibe envoutante. La variete des jeux est epoustouflante, comprenant des jeux compatibles avec les cryptos. Le bonus de bienvenue est genereux. Les agents repondent avec rapidite. Les transactions sont fiables et efficaces, mais encore des offres plus importantes seraient super. En bref, Action Casino assure un fun constant. Ajoutons aussi la navigation est simple et intuitive, amplifie l’adrenaline du jeu. Un avantage notable le programme VIP avec des recompenses exclusives, qui motive les joueurs.
Commencer Г naviguer|
startsomethingnewtoday.click – Site layout is clean, everything organized perfectly for easy browsing today.
globalfindsoutlet.click – Customer service replied quickly, helped me solve my order problem.
Роботы становятся частью общества сайт kraken onion кракен онион тор кракен онион зеркало кракен даркнет маркет
Bright Value Picks – Prices seemed reasonable, and browsing was quick and easy.
Je suis bluffe par Azur Casino, il propose une aventure palpitante. La variete des jeux est epoustouflante, proposant des jeux de table classiques. Avec des depots fluides. Le suivi est d’une fiabilite exemplaire. Les paiements sont securises et instantanes, malgre tout des bonus varies rendraient le tout plus fun. En bref, Azur Casino est un must pour les passionnes. En bonus l’interface est simple et engageante, ce qui rend chaque session plus excitante. Un avantage le programme VIP avec des niveaux exclusifs, offre des bonus exclusifs.
Tout apprendre|
Коллекционные Миниатюры Моделирование в цифровой скульптуре – это процесс создания виртуального прототипа будущего объекта. Художник, подобно скульптору прошлого, формирует форму, добавляет текстуру и детали, уделяя особое внимание анатомическим особенностям (если речь идет о создании фигур человека или животных). От точности и мастерства моделирования зависит конечный результат – качество и реалистичность 3D-печатной копии.
goliath casino bewertung http://goliath-casino.com/ .
ice bet casino ice bet casino .
yourjourneycontinues – This site shared a thought today that genuinely kept me motivated.
юрист онлайн консультация бесплатно без регистрации Консультация юриста онлайн Забудьте о долгих ожиданиях в приемной юриста, утомительных поездках и строгом графике. Онлайн консультация открывает двери к миру юридической экспертизы прямо из комфорта вашего дома или офиса. Это современный и эффективный способ решения юридических вопросов, который экономит ваше время и энергию.
happylifestylemarket.click – Checkout was fast, site is easy to browse and navigate today.
discovernewcollection.click – Found exactly what I wanted, checkout process was super simple.
urbantrendstore.click – Really enjoy the collection here, everything looks trendy and fresh.
learnsomethingincredible.click – Website layout is smooth, finding guides and articles was effortless today.
Reflective Purpose Spot – Inspiring content that guides me toward calm and clarity.
Технологии делают жизнь удобнее кракен онион зеркало кракен darknet кракен onion кракен ссылка onion
Je suis enthousiasme par Azur Casino, c’est une plateforme qui pulse avec energie. Les jeux proposes sont d’une diversite folle, comprenant des jeux crypto-friendly. 100% jusqu’a 500 € plus des tours gratuits. Les agents sont toujours la pour aider. Les paiements sont securises et rapides, bien que des bonus plus frequents seraient un hit. En conclusion, Azur Casino offre une aventure memorable. En plus le site est rapide et style, permet une plongee totale dans le jeu. Un avantage notable les evenements communautaires dynamiques, renforce la communaute.
Voir les dГ©tails|
Ko Lanta Ко Ланта: Тайская гостеприимность на фоне островов-близнецов – переосмысление. В провинции Краби на юге Таиланда находится архипелаг Ко Ланта, где Ко Ланта Ной и Ко Ланта Яй соединены мостом. Здесь традиционное тайское гостеприимство сочетается с нетронутой природой, создавая уникальную атмосферу для отдыха. В отличие от шумных туристических центров, Ко Ланта предлагает тишину и уединение, сохраняя при этом доступность современных удобств. Каждый из островов имеет свой неповторимый характер. Ко Ланта Ной является административным и логистическим центром, а Ко Ланта Яй – основной туристический остров с пляжами, отелями и ресторанами. Здесь можно найти как роскошные курорты, так и уютные бунгало, утопающие в зелени тропических садов. Главная достопримечательность Ко Ланта Яй – западное побережье, усеянное длинными песчаными пляжами, омываемыми Андаманским морем. Ко Ланта – это не только пляжный отдых, но и разнообразные активности: дайвинг, снорклинг, национальный парк Му Ко Ланта с джунглями и маяком. Вечером гостей ждут уютные бары и рестораны с видом на закат, где можно насладиться свежайшими морепродуктами и тайскими блюдами.
Find Your Strength Portal – Every visit leaves me inspired to take action.
Urban Buy Online – Browsing was simple, and product information was very clear.
Развитие технологий — двигатель прогресса кракен darknet kraken рабочая ссылка onion сайт kraken onion kraken darknet
Fresh Path Spot – Great tips for turning over a new leaf, makes change manageable.
Creative Outfit Guide – This link had some clever fashion twists I liked.
Цифровой прогресс не остановить kraken onion ссылка kraken зеркало рабочее актуальные зеркала kraken kraken сайт зеркала
seo специалист seo специалист .
Personal Development Spot – Informative posts motivate me to work on myself regularly.
Компьютеры становятся умнее людей актуальные зеркала kraken kraken актуальные ссылки кракен ссылка kraken kraken официальные ссылки
Fashion Finds Hub – Loved these cute pieces, found something truly unique.
Je suis emerveille par Azur Casino, ca invite a plonger dans le fun. Le choix est aussi large qu’un festival, offrant des tables live interactives. Le bonus initial est super. Le suivi est toujours au top. Les retraits sont ultra-rapides, a l’occasion plus de promotions frequentes boosteraient l’experience. En resume, Azur Casino merite un detour palpitant. D’ailleurs la navigation est claire et rapide, booste l’excitation du jeu. Un avantage les nombreuses options de paris sportifs, assure des transactions fiables.
Naviguer sur le site|
Je suis completement seduit par Azur Casino, ca invite a plonger dans le fun. Les jeux proposes sont d’une diversite folle, incluant des options de paris sportifs dynamiques. Il offre un coup de pouce allechant. Le suivi est impeccable. Les gains sont verses sans attendre, de temps en temps plus de promos regulieres ajouteraient du peps. En conclusion, Azur Casino est une plateforme qui fait vibrer. A souligner le site est fluide et attractif, ce qui rend chaque partie plus fun. Egalement excellent les options variees pour les paris sportifs, qui booste la participation.
https://azurcasino366fr.com/|
Слушеть Рэп онлайн Рэп часто затрагивает социальные и политические темы, отражая опыт жизни в различных сообществах, что делает его важным инструментом самовыражения.
Je suis enthousiasme par 1xBet Casino, on ressent une ambiance de fete. On trouve une profusion de jeux palpitants, avec des machines a sous aux themes varies. Il booste votre aventure des le depart. Disponible a toute heure via chat ou email. Les transactions sont fiables et efficaces, en revanche des recompenses supplementaires seraient parfaites. Dans l’ensemble, 1xBet Casino offre une aventure memorable. En complement le design est moderne et attrayant, booste l’excitation du jeu. Particulierement interessant les transactions crypto ultra-securisees, garantit des paiements securises.
Plongez-y|
J’adore l’energie de Action Casino, il offre une experience dynamique. La selection de jeux est impressionnante, incluant des options de paris sportifs dynamiques. Le bonus d’inscription est attrayant. Disponible 24/7 par chat ou email. Les transactions sont toujours securisees, par contre des bonus plus frequents seraient un hit. En bref, Action Casino assure un fun constant. Ajoutons que l’interface est lisse et agreable, apporte une touche d’excitation. Particulierement cool le programme VIP avec des avantages uniques, qui dynamise l’engagement.
Aller au site|
Je suis captive par Lucky 31 Casino, il procure une sensation de frisson. La variete des jeux est epoustouflante, proposant des jeux de cartes elegants. Il booste votre aventure des le depart. Le support client est irreprochable. Les gains arrivent en un eclair, neanmoins des offres plus genereuses rendraient l’experience meilleure. Dans l’ensemble, Lucky 31 Casino merite un detour palpitant. En bonus le design est moderne et energique, facilite une experience immersive. Un avantage notable les transactions en crypto fiables, renforce le lien communautaire.
Consulter les dГ©tails|
J’ai une affection particuliere pour 1xBet Casino, ca pulse comme une soiree animee. Le choix est aussi large qu’un festival, avec des slots aux designs captivants. Il rend le debut de l’aventure palpitant. Disponible a toute heure via chat ou email. Les transactions sont d’une fiabilite absolue, par contre des offres plus importantes seraient super. Pour finir, 1xBet Casino vaut une visite excitante. De plus l’interface est lisse et agreable, booste l’excitation du jeu. Un point fort les transactions crypto ultra-securisees, offre des recompenses continues.
Aller voir|
J’ai une affection particuliere pour Lucky 31 Casino, il cree une experience captivante. Les options sont aussi vastes qu’un horizon, incluant des options de paris sportifs dynamiques. Le bonus d’inscription est attrayant. Le support est efficace et amical. Les transactions sont d’une fiabilite absolue, de temps a autre des offres plus consequentes seraient parfaites. Pour conclure, Lucky 31 Casino offre une aventure memorable. En complement la plateforme est visuellement vibrante, facilite une immersion totale. Particulierement cool les competitions regulieres pour plus de fun, renforce le lien communautaire.
Voir le site|
Deal Spot Online – Always exciting offers, new deals appear every day.
Explore Dadasdas – Informative and well-crafted articles jo quickly read ho jate hain.
Слушеть Рэп онлайн Platforms like Spotify, YouTube, and Apple Music have transformed how fans discover and enjoy rap, providing access to a wide array of tracks and emerging artists from all over the world.
Je suis sous le charme de Action Casino, on ressent une ambiance festive. On trouve une profusion de jeux palpitants, incluant des paris sur des evenements sportifs. Il donne un avantage immediat. Le support est pro et accueillant. Les retraits sont simples et rapides, bien que des recompenses en plus seraient un bonus. En conclusion, Action Casino assure un fun constant. A noter la navigation est claire et rapide, amplifie l’adrenaline du jeu. Egalement top les transactions crypto ultra-securisees, garantit des paiements securises.
Visiter la page web|
Style Trend Portal – Came across fashion insights that helped streamline my wardrobe choices.
Роботы становятся частью общества kraken актуальные ссылки kraken зеркало рабочее актуальные зеркала kraken kraken сайт зеркала
Две дороги для Артёма, https://rant.li/ebckzicyue/zdes-kupit-kokain-mefedron-marikhuanu-boshki
Assume you are doing good linking to position you on the first pages of search engines.
bestpickshub.click – Really like the product choices here, everything feels well selected today.
Achieve Motivation Portal – Posts here are genuinely inspiring and fuel my drive.
it перевод услуги telegra.ph/Oshibka-lokalizacii-pochemu-vash-IT-produkt-ne-ponimayut-za-granicej-11-09 .
топ -10 бюро переводов в мск teletype.in/@alexd78/iF-xjHhC3iA .
bestbuycollection.click – Prices look fair, deals are definitely worth checking out now.
в этом разделе kraken ссылка на сайт
Rap musik The lyrical content of rap often dives deep into social issues, personal narratives, and cultural observations, making it a powerful medium for storytelling.
ИТ меняют систему образования кракен ссылка onion kraken актуальные ссылки кракен ссылка kraken kraken официальные ссылки
Share Knowledge Spot – Found a useful hint that made things easier for me today.
TurkPaydexHub se distingue comme une plateforme d’investissement crypto de pointe, qui met a profit la puissance de l’intelligence artificielle pour fournir a ses clients des avantages decisifs sur le marche.
Son IA analyse les marches en temps reel, detecte les occasions interessantes et met en ?uvre des strategies complexes avec une finesse et une celerite inatteignables pour les traders humains, maximisant ainsi les potentiels de rendement.
геотекстиль дорнит Мы гарантируем высокое качество нашей полиэтиленовой пленки, подтвержденное сертификатами и отзывами довольных клиентов. армированная пленка
бездепозитный бонус с выводом без пополнения
Choice World Portal – Many options to explore, found exactly what I wanted fast.
There is a lot of misunderstanding about these issues today. Your material helps explain things.
бесплатные спины без депозита
Мир переходит в онлайн сайт kraken onion kraken онион kraken онион тор кракен онион
Daily Presence Portal – Noticed a small reminder to appreciate what’s happening right now.
Easy Trend Spot – Minimalist layout, shopping experience is smooth and fast.
фриспины онлайн казино
геотекстиль дорнит Компания “ПОЛИСИНТЕЗ” предлагает отражающую изоляцию различной толщины и конструкции, включая односторонние и двухсторонние варианты, а также материалы с дополнительными слоями вспененного полиэтилена для улучшения тепло- и звукоизоляционных свойств.
TurkPaydexHub page officielle
TurkPaydexHub se differencie comme une plateforme d’investissement crypto de pointe, qui met a profit la puissance de l’intelligence artificielle pour proposer a ses membres des avantages decisifs sur le marche.
Son IA etudie les marches financiers en temps reel, identifie les opportunites et execute des strategies complexes avec une exactitude et une rapidite inatteignables pour les traders humains, maximisant ainsi les potentiels de rendement.
геотекстиль дорнит Материал не только отличается высокой эффективностью, но и простотой монтажа, экологичностью и долговечностью. Наша отражающая изоляция идеально подходит для утепления стен, крыш, полов и других конструкций, обеспечивая комфортный микроклимат в помещении и снижая воздействие на окружающую среду. геотекстиль дорнит
фриспины онлайн казино
Thank you for this great piece of content. Best Regards
Creative Picks Spot – Found a variety of options that immediately inspired me.
скачать рэп The lyrical content of rap is diverse and can cover a range of themes — from personal struggles and triumphs to social justice and political commentary.
Цифровая экономика формирует будущее кракен онион kraken darknet market kraken darknet ссылка сайт kraken darknet
Fresh Style Picks – Found a bunch of trendy pieces that caught my eye immediately.
it перевод стоимость telegra.ph/Oshibka-lokalizacii-pochemu-vash-IT-produkt-ne-ponimayut-za-granicej-11-09 .
бюро переводов в москве teletype.in/@alexd78/iF-xjHhC3iA .
Hi, possibly i’m being a little off topic here, but I was browsing your site and it looks stimulating. I’m writing a blog and trying to make it look neat, but everytime I touch it I mess something up. Did you design the blog yourself?
fashiondailycorner.click – Helpful product details, made choosing outfits easier and more enjoyable today.
Je suis emerveille par Mystake Casino, ca transporte dans un univers de plaisirs. Les options de jeu sont incroyablement variees, comprenant des jeux crypto-friendly. Il donne un elan excitant. Les agents repondent avec rapidite. Les retraits sont simples et rapides, toutefois des bonus varies rendraient le tout plus fun. En resume, Mystake Casino garantit un plaisir constant. En complement l’interface est lisse et agreable, amplifie le plaisir de jouer. Egalement genial les evenements communautaires pleins d’energie, cree une communaute vibrante.
Parcourir maintenant|
Je ne me lasse pas de Casinozer Casino, ca transporte dans un univers de plaisirs. Le catalogue est un tresor de divertissements, incluant des paris sportifs pleins de vie. 100% jusqu’a 500 € plus des tours gratuits. Le suivi est toujours au top. Les transactions sont fiables et efficaces, neanmoins des bonus varies rendraient le tout plus fun. En conclusion, Casinozer Casino offre une experience hors du commun. Pour completer la plateforme est visuellement electrisante, facilite une immersion totale. Particulierement attrayant les paiements en crypto rapides et surs, offre des bonus constants.
http://www.casinozercasino366fr.com|
Je ne me lasse pas de Pokerstars Casino, ca invite a l’aventure. Le catalogue de titres est vaste, proposant des jeux de casino traditionnels. Il offre un coup de pouce allechant. Le service client est excellent. Les transactions sont fiables et efficaces, de temps a autre plus de promos regulieres dynamiseraient le jeu. Pour faire court, Pokerstars Casino est un lieu de fun absolu. En extra le design est style et moderne, permet une immersion complete. A noter les evenements communautaires dynamiques, cree une communaute soudee.
http://www.pokerstarscasinofr.com|
J’ai une passion debordante pour Stake Casino, il cree une experience captivante. Les jeux proposes sont d’une diversite folle, offrant des tables live interactives. Il amplifie le plaisir des l’entree. Le support est pro et accueillant. Le processus est fluide et intuitif, occasionnellement des bonus plus frequents seraient un hit. Au final, Stake Casino vaut une visite excitante. Notons egalement l’interface est simple et engageante, ce qui rend chaque moment plus vibrant. Particulierement cool les evenements communautaires dynamiques, propose des privileges sur mesure.
http://www.stakecasino365fr.com|
Fashion Trend Spot – Always something new to discover, makes browsing exciting.
Программирование — язык нового поколения kraken сайт kraken ссылка тор kraken ссылка зеркало kraken ссылка на сайт
Creative Dream Gifts – Noticed a variety of items here that would make thoughtful presents.
Источник FreeCS
Good job for bringing something important to the internet!
Good points – – it will make a difference with my parents.
узнать больше Counter-Strike
игровые автоматы с бонусом без депозита
пояснения CS BOX
J’adore l’ambiance electrisante de Casinozer Casino, ca transporte dans un univers de plaisirs. La bibliotheque est pleine de surprises, offrant des sessions live palpitantes. Il propulse votre jeu des le debut. Le support est efficace et amical. Les transactions sont toujours securisees, occasionnellement des bonus plus frequents seraient un hit. En bref, Casinozer Casino est une plateforme qui pulse. Notons aussi la plateforme est visuellement captivante, facilite une experience immersive. Egalement excellent les evenements communautaires vibrants, propose des avantages uniques.
Essayer|
J’adore l’ambiance electrisante de Mystake Casino, il cree un monde de sensations fortes. Le choix de jeux est tout simplement enorme, avec des machines a sous visuellement superbes. Le bonus d’inscription est attrayant. Le service est disponible 24/7. Le processus est transparent et rapide, parfois des recompenses additionnelles seraient ideales. Pour finir, Mystake Casino offre une experience hors du commun. En plus la navigation est intuitive et lisse, ce qui rend chaque partie plus fun. Particulierement attrayant le programme VIP avec des niveaux exclusifs, cree une communaute soudee.
DГ©couvrir la page|
Je suis sous le charme de Mystake Casino, ca invite a l’aventure. Les jeux proposes sont d’une diversite folle, incluant des paris sportifs pleins de vie. Il rend le debut de l’aventure palpitant. Le support client est irreprochable. Les transactions sont fiables et efficaces, par contre plus de promotions variees ajouteraient du fun. En somme, Mystake Casino vaut une visite excitante. A noter le design est style et moderne, facilite une experience immersive. Particulierement attrayant le programme VIP avec des privileges speciaux, cree une communaute soudee.
Explorer le site web|
J’adore l’energie de Pokerstars Casino, il offre une experience dynamique. On trouve une gamme de jeux eblouissante, offrant des tables live interactives. 100% jusqu’a 500 € + tours gratuits. Le service d’assistance est au point. Les retraits sont lisses comme jamais, par ailleurs des recompenses supplementaires seraient parfaites. Pour conclure, Pokerstars Casino offre une aventure memorable. De surcroit le site est rapide et engageant, permet une plongee totale dans le jeu. Un bonus le programme VIP avec des avantages uniques, renforce la communaute.
Visiter pour plus|
J’adore l’ambiance electrisante de Stake Casino, on ressent une ambiance de fete. Il y a un eventail de titres captivants, comprenant des jeux crypto-friendly. Avec des depots rapides et faciles. Le service client est excellent. Les paiements sont securises et rapides, mais plus de promos regulieres ajouteraient du peps. Dans l’ensemble, Stake Casino vaut une exploration vibrante. Par ailleurs la plateforme est visuellement dynamique, booste le fun du jeu. Egalement super le programme VIP avec des niveaux exclusifs, renforce la communaute.
Explorer davantage|
ко ланта
Безопасность данных — приоритет №1 kraken зеркало kraken актуальные ссылки kraken зеркало kraken ссылка зеркало
Inspire Hub Online – Found a motivational thought that encouraged positive action.
Global Trend Hub – Fashion pieces from all over the world, shipped quickly and efficiently.
кайт хургада
it перевод в москве telegra.ph/Oshibka-lokalizacii-pochemu-vash-IT-produkt-ne-ponimayut-za-granicej-11-09 .
лучшие бюро переводов teletype.in/@alexd78/iF-xjHhC3iA .
ko lanta
игровые автоматы бонус за регистрацию
Potential Tools Spot – Useful advice and methods that encourage focused, ongoing growth.
Shopping With Delight Hub – Noticed a few products today that genuinely impressed me.
ИТ развивается экспоненциально кракен онион зеркало кракен onion сайт kra ссылка kraken сайт
бездепозитные слоты
Learning Insights Portal – Great educational tips that are simple to apply.
ко ланта
A good web site with interesting content, that’s what I need. Thank you for making this web site, and I will be visiting again. Do you do newsletters? I Can’t find it.
читать kra ссылка
бездепозитный бонус игровые автоматы
Top Global Buys – Had a quick look and noticed some handy items.
опубликовано здесь kraken рабочая ссылка onion
интернет kraken маркетплейс зеркало
подробнее kraken ссылка зеркало
перейти на сайт kraken официальные ссылки
Amazing content on your website.
Style Trend Portal – Lots of options to explore, discovered unique items easily.
1 win сайт 1win – современная платформа, предлагающая широкий спектр возможностей для любителей азартных игр и ставок на спорт. 1win официальный – это гарантия безопасности и надежности. Здесь вы найдете все необходимые инструменты для комфортной и прибыльной игры.
Opportunity Discovery – Helpful advice and fresh insights make exploring possibilities enjoyable.
другие kraken onion
кликните сюда kraken актуальные ссылки
опубликовано здесь kraken актуальные ссылки
Технологии создают новые вызовы кракен онион kraken рабочая ссылка onion сайт kraken onion kraken darknet
Cherished is likely to be what people say about your comments.
ко ланта
Вин 1win Лига ставок – это бренд, зарекомендовавший себя как надежный партнер в мире ставок. Широкая линия событий, выгодные коэффициенты и удобный интерфейс делают эту платформу привлекательной для широкой аудитории игроков. Лига ставок ставки – это широчайший спектр возможностей для реализации своих прогнозов. От футбольных баталий до теннисных поединков, от хоккейных матчей до киберспортивных турниров – выбор огромен, позволяя каждому найти что-то по душе и по своим знаниям.
продолжить актуальные зеркала kraken
Deals & Value Spot – Noticed some items with good prices that caught my attention.
shopthelatestdeals – Found amazing deals today, makes shopping fun and easy.
в этом разделе kraken darknet
Je suis accro a Pokerstars Casino, on ressent une ambiance de fete. La selection est riche et diversifiee, comprenant des jeux crypto-friendly. 100% jusqu’a 500 € avec des free spins. Le support est rapide et professionnel. Les transactions sont fiables et efficaces, de temps en temps des bonus plus frequents seraient un hit. En somme, Pokerstars Casino offre une aventure inoubliable. A mentionner le site est rapide et style, permet une immersion complete. A mettre en avant les nombreuses options de paris sportifs, offre des recompenses regulieres.
Commencer Г naviguer|
(10 euros gratis apuestas|10 mejores casas de apuestas|10 trucos
para ganar apuestas|15 euros gratis marca apuestas|1×2 apuestas|1×2 apuestas deportivas|1×2 apuestas que significa|1×2
en apuestas|1×2 en apuestas que significa|1×2 que
significa en apuestas|5 euros gratis apuestas|9 apuestas que siempre ganaras|a
partir de cuanto se declara apuestas|actividades de juegos de azar y apuestas|ad apuestas deportivas|aleksandre topuria
ufc apuestas|algoritmo para ganar apuestas deportivas|america apuestas|análisis nba apuestas|aplicacion android apuestas
deportivas|aplicacion apuestas deportivas|aplicacion apuestas deportivas android|aplicación de apuestas online|aplicacion para
hacer apuestas|aplicacion para hacer apuestas de futbol|aplicación para hacer apuestas de fútbol|aplicaciones apuestas
deportivas android|aplicaciones apuestas deportivas gratis|aplicaciones de apuestas android|aplicaciones
de apuestas de fútbol|aplicaciones de apuestas deportivas|aplicaciones de apuestas deportivas peru|aplicaciones de apuestas deportivas
perú|aplicaciones de apuestas en colombia|aplicaciones de apuestas gratis|aplicaciones de apuestas online|aplicaciones de apuestas seguras|aplicaciones
de apuestas sin dinero|aplicaciones para hacer apuestas|apostar
seguro apuestas deportivas|app android apuestas
deportivas|app apuestas|app apuestas android|app apuestas
de futbol|app apuestas deportivas|app apuestas deportivas android|app
apuestas deportivas argentina|app apuestas deportivas colombia|app
apuestas deportivas ecuador|app apuestas deportivas
españa|app apuestas deportivas gratis|app apuestas entre amigos|app apuestas futbol|app apuestas gratis|app apuestas
sin dinero|app casa de apuestas|app casas de
apuestas|app control apuestas|app de apuestas|app de apuestas android|app de apuestas
casino|app de apuestas colombia|app de apuestas con bono de bienvenida|app de apuestas de futbol|app de apuestas deportivas|app de apuestas deportivas
android|app de apuestas deportivas argentina|app
de apuestas deportivas colombia|app de apuestas deportivas en españa|app de apuestas
deportivas peru|app de apuestas deportivas perú|app de apuestas deportivas sin dinero|app de apuestas ecuador|app de apuestas en colombia|app de apuestas en españa|app de apuestas
en venezuela|app de apuestas futbol|app de apuestas gratis|app de apuestas online|app de apuestas para android|app de apuestas para ganar dinero|app de apuestas peru|app de apuestas
reales|app de casas de apuestas|app marca apuestas android|app moviles de apuestas|app para apuestas|app para apuestas de futbol|app para apuestas deportivas|app para apuestas deportivas en español|app para ganar apuestas deportivas|app para hacer apuestas|app para hacer apuestas deportivas|app para hacer apuestas entre amigos|app para llevar control de apuestas|app
pronosticos apuestas deportivas|app versus apuestas|apps apuestas
mundial|apps de apuestas|apps de apuestas con bono de bienvenida|apps de apuestas de
futbol|apps de apuestas deportivas peru|apps de apuestas mexico|apps para apuestas|aprender a hacer apuestas deportivas|aprender hacer apuestas deportivas|apuesta del dia apuestas deportivas|apuestas 10 euros gratis|apuestas 100
seguras|apuestas 1×2|apuestas 1X2|apuestas 2 division|apuestas 3
division|apuestas a caballos|apuestas a carreras de caballos|apuestas a colombia|apuestas
a corners|apuestas a ganar|apuestas a jugadores nba|apuestas a la baja|apuestas
a la nfl|apuestas al barcelona|apuestas al dia|apuestas al empate|apuestas al mundial|apuestas al tenis wta|apuestas alaves barcelona|apuestas alcaraz hoy|apuestas alemania españa|apuestas alonso campeon del mundo|apuestas
altas y bajas|apuestas altas y bajas nfl|apuestas ambos equipos marcan|apuestas america|apuestas android|apuestas anillo nba|apuestas antes
del mundial|apuestas anticipadas|apuestas anticipadas nba|apuestas apps|apuestas arabia argentina|apuestas
argentina|apuestas argentina campeon del mundo|apuestas argentina canada|apuestas argentina colombia|apuestas argentina croacia|apuestas argentina españa|apuestas
argentina francia|apuestas argentina francia cuanto paga|apuestas argentina francia mundial|apuestas argentina gana el mundial|apuestas argentina
gana mundial|apuestas argentina holanda|apuestas argentina mexico|apuestas argentina
méxico|apuestas argentina mundial|apuestas argentina online|apuestas argentina paises bajos|apuestas argentina polonia|apuestas
argentina uruguay|apuestas argentina vs australia|apuestas
argentina vs colombia|apuestas argentina vs francia|apuestas argentina vs peru|apuestas
argentinas|apuestas arsenal real madrid|apuestas ascenso
a primera division|apuestas ascenso a segunda|apuestas asiaticas|apuestas asiatico|apuestas athletic|apuestas athletic atletico|apuestas athletic barça|apuestas athletic barcelona|apuestas athletic
betis|apuestas athletic manchester|apuestas athletic
manchester united|apuestas athletic osasuna|apuestas
athletic real|apuestas athletic real madrid|apuestas athletic real sociedad|apuestas athletic real sociedad
final|apuestas athletic roma|apuestas athletic sevilla|apuestas athletic valencia|apuestas atletico|apuestas atletico barcelona|apuestas
atletico barsa|apuestas atletico campeon champions|apuestas atletico campeon de liga|apuestas atlético copenhague|apuestas atletico de madrid|apuestas atlético de madrid|apuestas atletico de
madrid barcelona|apuestas atletico de madrid gana la liga|apuestas atletico de madrid real madrid|apuestas
atlético de madrid real madrid|apuestas atletico de madrid vs barcelona|apuestas atletico madrid|apuestas atletico madrid real madrid|apuestas atletico madrid vs barcelona|apuestas atletico real madrid|apuestas atletico real madrid champions|apuestas atletismo|apuestas bajas|apuestas baloncesto|apuestas baloncesto acb|apuestas baloncesto handicap|apuestas
baloncesto hoy|apuestas baloncesto juegos olimpicos|apuestas
baloncesto nba|apuestas baloncesto pronostico|apuestas baloncesto
pronósticos|apuestas baloncesto prorroga|apuestas barca|apuestas barca athletic|apuestas barca
atletico|apuestas barca bayern|apuestas barca bayern munich|apuestas barca girona|apuestas barca hoy|apuestas barça hoy|apuestas barca inter|apuestas barca juventus|apuestas barca
madrid|apuestas barça madrid|apuestas barca
real madrid|apuestas barca vs juve|apuestas
barca vs madrid|apuestas barca vs psg|apuestas barcelona|apuestas barcelona alaves|apuestas barcelona athletic|apuestas barcelona atletico|apuestas barcelona atletico de madrid|apuestas barcelona atlético de madrid|apuestas barcelona atletico madrid|apuestas barcelona bayern|apuestas barcelona betis|apuestas barcelona campeon de liga|apuestas barcelona celta|apuestas barcelona espanyol|apuestas barcelona gana la champions|apuestas barcelona girona|apuestas barcelona granada|apuestas barcelona hoy|apuestas barcelona
inter|apuestas barcelona madrid|apuestas barcelona osasuna|apuestas barcelona psg|apuestas barcelona real madrid|apuestas barcelona
real sociedad|apuestas barcelona sevilla|apuestas barcelona valencia|apuestas barcelona villarreal|apuestas barcelona vs atletico madrid|apuestas barcelona vs madrid|apuestas barcelona vs real madrid|apuestas
barsa madrid|apuestas basket hoy|apuestas bayern barcelona|apuestas bayern vs barcelona|apuestas beisbol|apuestas béisbol|apuestas beisbol mlb|apuestas beisbol pronosticos|apuestas beisbol venezolano|apuestas betis|apuestas betis – chelsea|apuestas betis
barcelona|apuestas betis chelsea|apuestas betis fiorentina|apuestas betis girona|apuestas betis madrid|apuestas betis mallorca|apuestas betis real madrid|apuestas betis real
sociedad|apuestas betis sevilla|apuestas betis
valencia|apuestas betis valladolid|apuestas betis vs valencia|apuestas betplay
hoy colombia|apuestas betsson peru|apuestas bienvenida|apuestas billar online|apuestas bolivia vs colombia|apuestas bono|apuestas bono bienvenida|apuestas bono de bienvenida|apuestas bono de bienvenida sin deposito|apuestas bono gratis|apuestas bono
sin deposito|apuestas bonos sin deposito|apuestas borussia real
madrid|apuestas boxeo|apuestas boxeo de campeonato|apuestas boxeo españa|apuestas boxeo español|apuestas boxeo femenino
olimpiadas|apuestas boxeo hoy|apuestas boxeo online|apuestas brasil colombia|apuestas brasil peru|apuestas brasil uruguay|apuestas brasil vs colombia|apuestas brasil vs peru|apuestas caballos|apuestas caballos colocado|apuestas caballos españa|apuestas
caballos hipodromo|apuestas caballos hoy|apuestas caballos madrid|apuestas caballos online|apuestas
caballos sanlucar de barrameda|apuestas caballos zarzuela|apuestas calculador|apuestas campeon|apuestas campeon champions|apuestas campeón champions|apuestas campeon champions 2025|apuestas campeon champions league|apuestas
campeon conference league|apuestas campeon copa america|apuestas campeon copa del
rey|apuestas campeon de champions|apuestas campeon de la champions|apuestas campeon de liga|apuestas campeon del mundo|apuestas campeon eurocopa|apuestas campeón eurocopa|apuestas campeon europa league|apuestas campeon f1|apuestas campeon f1 2025|apuestas campeon formula 1|apuestas campeon libertadores|apuestas campeon liga|apuestas campeon liga
bbva|apuestas campeon liga española|apuestas campeon liga
santander|apuestas campeon motogp 2025|apuestas campeon mundial|apuestas campeón mundial|apuestas campeon mundial baloncesto|apuestas campeon nba|apuestas
campeón nba|apuestas campeon premier|apuestas campeon premier league|apuestas campeon roland garros|apuestas campeonato f1|apuestas campeonatos de futbol|apuestas carrera de caballos|apuestas carrera
de caballos hoy|apuestas carrera de caballos nocturnas|apuestas carrera de galgos fin de semana|apuestas carrera de galgos hoy|apuestas carrera de galgos nocturnas|apuestas carreras caballos|apuestas carreras caballos sanlucar|apuestas carreras de caballos|apuestas carreras de caballos
en directo|apuestas carreras de caballos en vivo|apuestas carreras
de caballos españa|apuestas carreras de caballos hoy|apuestas carreras
de caballos nacionales|apuestas carreras de caballos
nocturnas|apuestas carreras de caballos online|apuestas carreras
de caballos sanlucar|apuestas carreras de caballos
sanlúcar|apuestas carreras de galgos|apuestas carreras de galgos en vivo|apuestas carreras de galgos nocturnas|apuestas
carreras de galgos pre partido|apuestas casino|apuestas
casino barcelona|apuestas casino futbol|apuestas casino gran madrid|apuestas casino
gratis|apuestas casino madrid|apuestas casino online|apuestas
casino online argentina|apuestas casinos|apuestas casinos online|apuestas celta|apuestas celta barcelona|apuestas celta betis|apuestas
celta eibar|apuestas celta espanyol|apuestas celta granada|apuestas celta madrid|apuestas celta manchester|apuestas
celta real madrid|apuestas champion league|apuestas champions foro|apuestas champions
hoy|apuestas champions league|apuestas champions league – pronósticos|apuestas champions league 2025|apuestas champions league hoy|apuestas
champions league pronosticos|apuestas champions league pronósticos|apuestas champions pronosticos|apuestas chelsea barcelona|apuestas
chelsea betis|apuestas chile|apuestas chile peru|apuestas chile venezuela|apuestas chile vs colombia|apuestas chile vs
uruguay|apuestas ciclismo|apuestas ciclismo en vivo|apuestas
ciclismo femenino|apuestas ciclismo tour francia|apuestas ciclismo vuelta|apuestas ciclismo
vuelta a españa|apuestas ciclismo vuelta españa|apuestas city madrid|apuestas city real madrid|apuestas
clasico|apuestas clasico español|apuestas clasico real madrid barcelona|apuestas clasificacion mundial|apuestas colombia|apuestas colombia argentina|apuestas colombia brasil|apuestas colombia paraguay|apuestas colombia uruguay|apuestas colombia vs argentina|apuestas colombia vs brasil|apuestas combinadas|apuestas combinadas como funcionan|apuestas combinadas
de futbol|apuestas combinadas de fútbol|apuestas combinadas foro|apuestas combinadas futbol|apuestas combinadas
hoy|apuestas combinadas mismo partido|apuestas combinadas mundial|apuestas combinadas nba|apuestas combinadas
para esta semana|apuestas combinadas para hoy|apuestas combinadas para mañana|apuestas combinadas
pronosticos|apuestas combinadas recomendadas|apuestas combinadas seguras|apuestas
combinadas seguras para hoy|apuestas combinadas seguras para mañana|apuestas como ganar|apuestas
comparador|apuestas con bono de bienvenida|apuestas con dinero ficticio|apuestas con dinero real|apuestas con dinero virtual|apuestas
con handicap|apuestas con handicap asiatico|apuestas con handicap baloncesto|apuestas
con mas probabilidades de ganar|apuestas con paypal|apuestas con tarjeta de
credito|apuestas con tarjeta de debito|apuestas consejos|apuestas copa|apuestas copa africa|apuestas copa america|apuestas copa américa|apuestas copa
argentina|apuestas copa brasil|apuestas copa davis|apuestas copa de europa|apuestas copa del mundo|apuestas copa del rey|apuestas copa del rey baloncesto|apuestas copa del rey final|apuestas copa del rey futbol|apuestas copa del rey ganador|apuestas copa
del rey hoy|apuestas copa del rey pronosticos|apuestas copa del
rey pronósticos|apuestas copa europa|apuestas copa italia|apuestas
copa libertadores|apuestas copa mundial de hockey|apuestas copa rey|apuestas copa sudamericana|apuestas corners|apuestas corners hoy|apuestas
croacia argentina|apuestas cuartos eurocopa|apuestas cuotas|apuestas cuotas
altas|apuestas cuotas bajas|apuestas de 1 euro|apuestas de baloncesto|apuestas de baloncesto hoy|apuestas de baloncesto nba|apuestas
de baloncesto para hoy|apuestas de beisbol|apuestas de beisbol para hoy|apuestas
de blackjack en linea|apuestas de boxeo|apuestas de boxeo canelo|apuestas de
boxeo en las vegas|apuestas de boxeo hoy|apuestas de boxeo online|apuestas de caballo|apuestas de
caballos|apuestas de caballos como funciona|apuestas de caballos como se juega|apuestas de caballos en colombia|apuestas
de caballos en españa|apuestas de caballos en linea|apuestas de caballos españa|apuestas de caballos ganador y colocado|apuestas de caballos
internacionales|apuestas de caballos juegos|apuestas de caballos online|apuestas de caballos online en venezuela|apuestas de caballos por internet|apuestas de caballos pronosticos|apuestas de caballos pronósticos|apuestas de carrera de caballos|apuestas de carreras de caballos|apuestas
de carreras de caballos online|apuestas de casino|apuestas de casino online|apuestas de casino
por internet|apuestas de champions league|apuestas de
ciclismo|apuestas de colombia|apuestas de copa america|apuestas de corners|apuestas de deportes en linea|apuestas de
deportes online|apuestas de dinero|apuestas de esports|apuestas de eurocopa|apuestas de europa league|apuestas de f1|apuestas de formula 1|apuestas de futbol|apuestas de fútbol|apuestas de
futbol app|apuestas de futbol argentina|apuestas de futbol colombia|apuestas de futbol en colombia|apuestas de
futbol en directo|apuestas de futbol en linea|apuestas de futbol en vivo|apuestas de futbol español|apuestas
de futbol gratis|apuestas de futbol hoy|apuestas de futbol mundial|apuestas
de futbol online|apuestas de fútbol online|apuestas de futbol para hoy|apuestas de fútbol para hoy|apuestas
de futbol para hoy seguras|apuestas de futbol para mañana|apuestas de futbol peru|apuestas de futbol pronosticos|apuestas de fútbol pronósticos|apuestas de futbol seguras|apuestas de futbol seguras para hoy|apuestas de futbol sin dinero|apuestas
de galgos|apuestas de galgos como ganar|apuestas de galgos en directo|apuestas de galgos online|apuestas de galgos trucos|apuestas de golf|apuestas de hockey|apuestas de hockey
sobre hielo|apuestas de hoy|apuestas de hoy seguras|apuestas de juego|apuestas de juegos|apuestas de juegos
deportivos|apuestas de juegos online|apuestas de la champions league|apuestas de la copa américa|apuestas
de la eurocopa|apuestas de la europa league|apuestas de la liga|apuestas
de la liga bbva|apuestas de la liga española|apuestas de la nba|apuestas de la nfl|apuestas de la ufc|apuestas de mlb|apuestas de nba|apuestas de nba para
hoy|apuestas de partidos|apuestas de partidos de futbol|apuestas de peleas ufc|apuestas de
perros en vivo|apuestas de perros virtuales|apuestas
de peru|apuestas de sistema|apuestas de sistema como funciona|apuestas de
sistema explicacion|apuestas de sistema explicación|apuestas de tenis|apuestas de
tenis de mesa|apuestas de tenis en directo|apuestas de tenis hoy|apuestas de tenis para hoy|apuestas de tenis pronosticos|apuestas de tenis seguras|apuestas de todo tipo|apuestas de
ufc|apuestas de ufc hoy|apuestas del boxeo|apuestas del clasico|apuestas del clasico real madrid barca|apuestas del dia|apuestas del día|apuestas del dia de hoy|apuestas del dia deportivas|apuestas del dia futbol|apuestas del mundial|apuestas del partido de hoy|apuestas del real madrid|apuestas del rey|apuestas del sistema|apuestas deporte|apuestas deportes|apuestas deportiva|apuestas deportivas|apuestas deportivas 1 euro|apuestas deportivas 10 euros gratis|apuestas deportivas 100 seguras|apuestas deportivas 1×2|apuestas deportivas android|apuestas deportivas app|apuestas deportivas apps|apuestas
deportivas argentina|apuestas deportivas argentina futbol|apuestas deportivas argentina legal|apuestas
deportivas atletico de madrid|apuestas deportivas baloncesto|apuestas deportivas barca
madrid|apuestas deportivas barcelona|apuestas deportivas beisbol|apuestas deportivas bono|apuestas deportivas bono bienvenida|apuestas deportivas bono de bienvenida|apuestas deportivas bono sin deposito|apuestas deportivas bonos de bienvenida|apuestas deportivas boxeo|apuestas deportivas
caballos|apuestas deportivas calculadora|apuestas deportivas campeon liga|apuestas deportivas casino|apuestas
deportivas casino barcelona|apuestas deportivas casino online|apuestas
deportivas cerca de mi|apuestas deportivas champions league|apuestas deportivas
chile|apuestas deportivas ciclismo|apuestas deportivas colombia|apuestas deportivas com|apuestas deportivas com foro|apuestas deportivas com pronosticos|apuestas deportivas combinadas|apuestas deportivas combinadas para hoy|apuestas deportivas como
se juega|apuestas deportivas comparador|apuestas deportivas con bono
gratis|apuestas deportivas con bonos gratis|apuestas deportivas con dinero ficticio|apuestas deportivas con paypal|apuestas deportivas con puntos
virtuales|apuestas deportivas consejos|apuestas deportivas consejos para ganar|apuestas deportivas copa america|apuestas deportivas copa del rey|apuestas deportivas copa libertadores|apuestas deportivas copa mundial|apuestas deportivas corners|apuestas deportivas cual es la mejor|apuestas deportivas cuotas altas|apuestas deportivas de baloncesto|apuestas deportivas de boxeo|apuestas deportivas
de colombia|apuestas deportivas de futbol|apuestas deportivas de nba|apuestas deportivas de nhl|apuestas deportivas de peru|apuestas
deportivas de tenis|apuestas deportivas del dia|apuestas deportivas
dinero ficticio|apuestas deportivas directo|apuestas deportivas doble oportunidad|apuestas deportivas en argentina|apuestas deportivas en chile|apuestas deportivas en colombia|apuestas deportivas en directo|apuestas deportivas en españa|apuestas deportivas en español|apuestas deportivas
en linea|apuestas deportivas en línea|apuestas deportivas en peru|apuestas deportivas en perú|apuestas deportivas en sevilla|apuestas deportivas en uruguay|apuestas deportivas en vivo|apuestas deportivas es|apuestas deportivas es pronosticos|apuestas deportivas españa|apuestas deportivas españolas|apuestas
deportivas esports|apuestas deportivas estadisticas|apuestas deportivas estrategias|apuestas deportivas estrategias seguras|apuestas deportivas eurocopa|apuestas deportivas europa
league|apuestas deportivas f1|apuestas deportivas faciles de ganar|apuestas deportivas
formula 1|apuestas deportivas foro|apuestas deportivas
foro futbol|apuestas deportivas foro tenis|apuestas deportivas francia
argentina|apuestas deportivas futbol|apuestas deportivas fútbol|apuestas deportivas futbol argentino|apuestas deportivas futbol colombia|apuestas deportivas futbol español|apuestas deportivas gana|apuestas
deportivas ganadas|apuestas deportivas ganar dinero seguro|apuestas deportivas gane|apuestas
deportivas golf|apuestas deportivas gratis|apuestas deportivas gratis con premios|apuestas deportivas gratis hoy|apuestas deportivas gratis sin deposito|apuestas deportivas handicap|apuestas deportivas
handicap asiatico|apuestas deportivas hoy|apuestas deportivas impuestos|apuestas deportivas interior argentina|apuestas deportivas juegos olimpicos|apuestas deportivas la liga|apuestas
deportivas legales|apuestas deportivas legales en colombia|apuestas deportivas libres de impuestos|apuestas deportivas licencia españa|apuestas deportivas liga española|apuestas deportivas listado|apuestas
deportivas listado clasico|apuestas deportivas
madrid|apuestas deportivas mas seguras|apuestas deportivas mejor pagadas|apuestas deportivas mejores|apuestas deportivas mejores app|apuestas deportivas mejores casas|apuestas deportivas mejores cuotas|apuestas deportivas mejores paginas|apuestas
deportivas mexico|apuestas deportivas méxico|apuestas deportivas mlb|apuestas deportivas mlb hoy|apuestas deportivas multiples|apuestas deportivas mundial|apuestas deportivas murcia|apuestas deportivas nba|apuestas deportivas nba hoy|apuestas deportivas nfl|apuestas deportivas nhl|apuestas deportivas nuevas|apuestas deportivas ofertas|apuestas deportivas
online|apuestas deportivas online argentina|apuestas deportivas online
chile|apuestas deportivas online colombia|apuestas deportivas online
en colombia|apuestas deportivas online españa|apuestas
deportivas online mexico|apuestas deportivas online paypal|apuestas deportivas online peru|apuestas deportivas online por
internet|apuestas deportivas pago paypal|apuestas deportivas para ganar dinero|apuestas deportivas para hoy|apuestas
deportivas para hoy pronosticos|apuestas deportivas partido suspendido|apuestas deportivas partidos de hoy|apuestas deportivas paypal|apuestas
deportivas peru|apuestas deportivas perú|apuestas
deportivas peru vs ecuador|apuestas deportivas predicciones|apuestas deportivas promociones|apuestas deportivas pronostico|apuestas deportivas pronóstico|apuestas deportivas pronostico hoy|apuestas deportivas
pronosticos|apuestas deportivas pronósticos|apuestas deportivas pronosticos expertos|apuestas deportivas pronosticos gratis|apuestas deportivas pronosticos nba|apuestas deportivas pronosticos tenis|apuestas deportivas que aceptan paypal|apuestas deportivas real madrid|apuestas deportivas regalo bienvenida|apuestas deportivas resultado
exacto|apuestas deportivas resultados|apuestas deportivas rugby|apuestas deportivas seguras|apuestas deportivas seguras foro|apuestas deportivas seguras hoy|apuestas deportivas seguras
para hoy|apuestas deportivas seguras telegram|apuestas deportivas sevilla|apuestas deportivas simulador eurocopa|apuestas deportivas sin deposito|apuestas deportivas sin deposito inicial|apuestas deportivas sin dinero|apuestas
deportivas sin dinero real|apuestas deportivas sin registro|apuestas deportivas stake|apuestas
deportivas stake 10|apuestas deportivas telegram españa|apuestas deportivas tenis|apuestas
deportivas tenis de mesa|apuestas deportivas tenis foro|apuestas deportivas tenis hoy|apuestas deportivas tips|apuestas
deportivas tipster|apuestas deportivas ufc|apuestas deportivas
uruguay|apuestas deportivas valencia|apuestas
deportivas valencia barcelona|apuestas deportivas venezuela|apuestas deportivas virtuales|apuestas deportivas y casino|apuestas deportivas y casino
online|apuestas deportivas.com|apuestas deportivas.com foro|apuestas
deportivas.es|apuestas deportivos pronosticos|apuestas deposito minimo 1 euro|apuestas
descenso a segunda|apuestas descenso a segunda b|apuestas descenso la liga|apuestas descenso primera division|apuestas descenso segunda|apuestas dia|apuestas diarias seguras|apuestas dinero|apuestas dinero ficticio|apuestas dinero real|apuestas dinero virtual|apuestas directas|apuestas directo|apuestas directo futbol|apuestas division de honor juvenil|apuestas dnb|apuestas
doble oportunidad|apuestas doble resultado|apuestas dobles|apuestas dobles y triples|apuestas
dortmund barcelona|apuestas draft nba|apuestas draft nfl|apuestas
ecuador vs argentina|apuestas ecuador vs venezuela|apuestas egipto
uruguay|apuestas el clasico|apuestas elecciones venezuela|apuestas empate|apuestas en baloncesto|apuestas en barcelona|apuestas
en beisbol|apuestas en boxeo|apuestas en caballos|apuestas en carreras de caballos|apuestas en casino|apuestas en casino online|apuestas en casinos|apuestas en casinos
online|apuestas en chile|apuestas en ciclismo|apuestas en colombia|apuestas en colombia de futbol|apuestas en directo|apuestas en directo futbol|apuestas en directo pronosticos|apuestas en el
futbol|apuestas en el tenis|apuestas en españa|apuestas en esports|apuestas en eventos deportivos virtuales|apuestas en golf|apuestas en juegos|apuestas en la champions league|apuestas en la
eurocopa|apuestas en la liga|apuestas en la nba|apuestas en la nfl|apuestas en las vegas mlb|apuestas en las vegas nfl|apuestas en linea|apuestas
en línea|apuestas en linea argentina|apuestas en linea boxeo|apuestas en linea chile|apuestas en linea colombia|apuestas en línea de fútbol|apuestas en linea
deportivas|apuestas en linea españa|apuestas en linea estados unidos|apuestas en linea futbol|apuestas en linea mexico|apuestas en línea méxico|apuestas en linea mundial|apuestas en linea peru|apuestas en linea usa|apuestas en los esports|apuestas en madrid|apuestas en méxico|apuestas en mexico online|apuestas en nba|apuestas en partidos
de futbol|apuestas en partidos de futbol en vivo|apuestas en partidos de tenis en directo|apuestas
en perú|apuestas en sevilla|apuestas en sistema|apuestas en stake|apuestas en tenis|apuestas
en tenis de mesa|apuestas en valencia|apuestas en vivo|apuestas
en vivo argentina|apuestas en vivo casino|apuestas en vivo
futbol|apuestas en vivo fútbol|apuestas en vivo nba|apuestas en vivo peru|apuestas en vivo tenis|apuestas
en vivo ufc|apuestas equipo mbappe|apuestas equipos de futbol|apuestas españa|apuestas españa alemania|apuestas españa alemania eurocopa|apuestas españa croacia|apuestas españa eurocopa|apuestas españa
francia|apuestas españa francia eurocopa|apuestas españa
gana el mundial|apuestas españa gana eurocopa|apuestas españa gana mundial|apuestas españa georgia|apuestas españa holanda|apuestas españa inglaterra|apuestas españa inglaterra cuotas|apuestas españa
inglaterra eurocopa|apuestas españa italia|apuestas españa mundial|apuestas españa paises
bajos|apuestas español|apuestas español oviedo|apuestas espanyol barcelona|apuestas espanyol betis|apuestas espanyol villarreal|apuestas esport|apuestas esports|apuestas esports colombia|apuestas esports españa|apuestas
esports fifa|apuestas esports gratis|apuestas esports lol|apuestas esports peru|apuestas esports valorant|apuestas estadisticas|apuestas estrategias|apuestas euro|apuestas euro copa|apuestas eurocopa|apuestas eurocopa campeon|apuestas eurocopa españa|apuestas eurocopa favoritos|apuestas eurocopa femenina|apuestas eurocopa final|apuestas eurocopa ganador|apuestas eurocopa
hoy|apuestas eurocopa sub 21|apuestas euroliga baloncesto|apuestas euroliga pronosticos|apuestas europa league|apuestas europa
league hoy|apuestas europa league pronosticos|apuestas europa
league pronósticos|apuestas euros|apuestas f1 abu dhabi|apuestas f1 bahrein|apuestas f1
canada|apuestas f1 china|apuestas f1 cuotas|apuestas f1 hoy|apuestas f1 las
vegas|apuestas f1 miami|apuestas f1 monaco|apuestas faciles de ganar|apuestas fáciles de ganar|apuestas faciles para ganar|apuestas favoritas|apuestas favorito champions|apuestas favoritos champions|apuestas favoritos eurocopa|apuestas favoritos
mundial|apuestas fc barcelona|apuestas final champions cuotas|apuestas final champions league|apuestas final champions peru|apuestas final copa|apuestas final copa
america|apuestas final copa de europa|apuestas final
copa del rey|apuestas final copa europa|apuestas final copa libertadores|apuestas final copa rey|apuestas final de copa|apuestas final de copa del rey|apuestas final del mundial|apuestas final euro|apuestas final eurocopa|apuestas final
europa league|apuestas final libertadores|apuestas final mundial|apuestas final
nba|apuestas final rugby|apuestas final uefa europa league|apuestas final.mundial|apuestas finales de
conferencia nfl|apuestas finales nba|apuestas fiorentina betis|apuestas formula|apuestas formula 1|apuestas fórmula 1|apuestas
fórmula 1 pronósticos|apuestas formula uno|apuestas foro|apuestas
foro nba|apuestas francia argentina|apuestas francia españa|apuestas futbol|apuestas fútbol|apuestas
futbol americano|apuestas futbol americano nfl|apuestas futbol argentina|apuestas futbol argentino|apuestas futbol champions league|apuestas futbol chile|apuestas futbol colombia|apuestas futbol consejos|apuestas futbol en directo|apuestas fútbol en directo|apuestas futbol en vivo|apuestas
fútbol en vivo|apuestas futbol españa|apuestas futbol español|apuestas
fútbol español|apuestas futbol eurocopa|apuestas futbol femenino|apuestas futbol foro|apuestas futbol gratis|apuestas futbol hoy|apuestas fútbol hoy|apuestas futbol juegos
olimpicos|apuestas futbol mexico|apuestas futbol
mundial|apuestas futbol online|apuestas futbol para
hoy|apuestas futbol peru|apuestas futbol pronosticos|apuestas futbol sala|apuestas futbol telegram|apuestas futbol virtual|apuestas galgos|apuestas galgos en directo|apuestas galgos hoy|apuestas galgos online|apuestas galgos pronosticos|apuestas galgos trucos|apuestas gana|apuestas gana colombia|apuestas gana resultados|apuestas ganadas|apuestas ganadas
hoy|apuestas ganador champions league|apuestas ganador
copa america|apuestas ganador copa del rey|apuestas
ganador copa del rey baloncesto|apuestas ganador copa libertadores|apuestas ganador de la eurocopa|apuestas ganador de la liga|apuestas ganador del
mundial|apuestas ganador eurocopa|apuestas ganador europa league|apuestas ganador f1|apuestas ganador la liga|apuestas ganador liga española|apuestas ganador mundial|apuestas ganador mundial baloncesto|apuestas ganador mundial
f1|apuestas ganador nba|apuestas ganadores eurocopa|apuestas ganadores mundial|apuestas ganar champions|apuestas
ganar eurocopa|apuestas ganar liga|apuestas ganar mundial|apuestas ganar nba|apuestas getafe
valencia|apuestas ghana uruguay|apuestas girona|apuestas girona
athletic|apuestas girona betis|apuestas girona campeon de liga|apuestas girona campeon liga|apuestas girona gana la liga|apuestas girona real madrid|apuestas girona real sociedad|apuestas goleador eurocopa|apuestas goleadores eurocopa|apuestas goles asiaticos|apuestas
golf|apuestas golf masters|apuestas golf pga|apuestas granada barcelona|apuestas grand slam de tenis|apuestas
gratis|apuestas gratis casino|apuestas gratis con premios|apuestas gratis hoy|apuestas gratis para hoy|apuestas gratis por registro|apuestas gratis puntos|apuestas gratis regalos|apuestas gratis sin deposito|apuestas gratis sin depósito|apuestas gratis sin ingreso|apuestas gratis sports|apuestas
gratis y ganar premios|apuestas grupo a eurocopa|apuestas grupos
eurocopa|apuestas handicap|apuestas handicap asiatico|apuestas handicap baloncesto|apuestas handicap como funciona|apuestas handicap nba|apuestas handicap nfl|apuestas hipicas online|apuestas hípicas online|apuestas hipicas
venezuela|apuestas hockey|apuestas hockey hielo|apuestas
hockey patines|apuestas hockey sobre hielo|apuestas holanda argentina|apuestas holanda
vs argentina|apuestas hoy|apuestas hoy champions|apuestas hoy futbol|apuestas hoy nba|apuestas hoy pronosticos|apuestas hoy seguras|apuestas impuestos|apuestas inglaterra paises bajos|apuestas inter barca|apuestas inter barcelona|apuestas juego|apuestas juegos|apuestas juegos en linea|apuestas juegos olimpicos|apuestas juegos olímpicos|apuestas juegos olimpicos baloncesto|apuestas juegos online|apuestas juegos
virtuales|apuestas jugador sevilla|apuestas jugadores nba|apuestas kings league americas|apuestas la liga|apuestas la
liga española|apuestas la liga hoy|apuestas la liga santander|apuestas las vegas mlb|apuestas las vegas
nba|apuestas las vegas nfl|apuestas league of legends mundial|apuestas legal|apuestas legales|apuestas legales en colombia|apuestas legales en españa|apuestas legales en estados unidos|apuestas legales españa|apuestas
leganes betis|apuestas libertadores|apuestas licencia|apuestas liga
1 peru|apuestas liga argentina|apuestas liga bbva pronosticos|apuestas liga de campeones|apuestas liga de campeones de baloncesto|apuestas liga de campeones
de hockey|apuestas liga españa|apuestas liga española|apuestas liga santander pronosticos|apuestas ligas de futbol|apuestas linea|apuestas linea de gol|apuestas liverpool barcelona|apuestas liverpool real madrid|apuestas lol mundial|apuestas madrid|apuestas madrid arsenal|apuestas madrid atletico|apuestas madrid atletico champions|apuestas madrid barca|apuestas madrid barça|apuestas madrid barca
hoy|apuestas madrid barca supercopa|apuestas madrid barcelona|apuestas
madrid barsa|apuestas madrid bayern|apuestas madrid betis|apuestas madrid borussia|apuestas madrid campeon champions|apuestas madrid celta|apuestas madrid
city|apuestas madrid dortmund|apuestas madrid gana la
liga|apuestas madrid gana liga|apuestas madrid hoy|apuestas madrid
liverpool|apuestas madrid osasuna|apuestas madrid
sevilla|apuestas madrid valencia|apuestas madrid vs arsenal|apuestas madrid vs barcelona|apuestas
mallorca osasuna|apuestas mallorca real sociedad|apuestas manchester athletic|apuestas manchester city real madrid|apuestas mas
faciles de ganar|apuestas mas seguras|apuestas mas seguras para hoy|apuestas masters de golf|apuestas masters de tenis|apuestas maximo
goleador eurocopa|apuestas maximo goleador mundial|apuestas
mejor jugador eurocopa|apuestas mejores casinos online|apuestas mexico|apuestas méxico|apuestas
mexico polonia|apuestas méxico polonia|apuestas mlb|apuestas mlb hoy|apuestas mlb las vegas|apuestas mlb para hoy|apuestas mlb pronosticos|apuestas mlb
usa|apuestas mma ufc|apuestas momios|apuestas multiples|apuestas múltiples|apuestas multiples como
funcionan|apuestas multiples el gordo|apuestas multiples futbol|apuestas mundial|apuestas mundial
2026|apuestas mundial baloncesto|apuestas mundial balonmano|apuestas mundial brasil|apuestas
mundial campeon|apuestas mundial ciclismo|apuestas mundial clubes|apuestas mundial de baloncesto|apuestas mundial de ciclismo|apuestas mundial
de clubes|apuestas mundial de futbol|apuestas mundial de fútbol|apuestas mundial de rugby|apuestas mundial f1|apuestas mundial favoritos|apuestas mundial femenino|apuestas mundial
formula 1|apuestas mundial futbol|apuestas mundial ganador|apuestas
mundial lol|apuestas mundial moto gp|apuestas mundial motogp|apuestas mundial rugby|apuestas mundial sub 17|apuestas mundiales|apuestas mundialistas|apuestas mvp
eurocopa|apuestas mvp nba|apuestas mvp nfl|apuestas nacionales de colombia|apuestas nba|apuestas nba all star|apuestas nba
campeon|apuestas nba consejos|apuestas nba
esta noche|apuestas nba finals|apuestas nba gratis|apuestas nba hoy|apuestas nba hoy
jugadores|apuestas nba hoy pronosticos|apuestas nba para hoy|apuestas nba playoffs|apuestas nba pronosticos|apuestas nba pronósticos|apuestas nba pronosticos hoy|apuestas nba tipster|apuestas nfl|apuestas nfl hoy|apuestas nfl las
vegas|apuestas nfl playoffs|apuestas nfl pronosticos|apuestas
nfl pronósticos|apuestas nfl semana 4|apuestas nfl super bowl|apuestas nhl|apuestas
nhl pronosticos|apuestas octavos eurocopa|apuestas
ofertas|apuestas online|apuestas online argentina|apuestas online argentina legal|apuestas online bono|apuestas online bono bienvenida|apuestas online boxeo|apuestas online caballos|apuestas online carreras de caballos|apuestas online casino|apuestas online champions league|apuestas online chile|apuestas online ciclismo|apuestas online colombia|apuestas
online comparativa|apuestas online con paypal|apuestas
online de caballos|apuestas online deportivas|apuestas online en argentina|apuestas online
en peru|apuestas online espana|apuestas online españa|apuestas online esports|apuestas online foro|apuestas online futbol|apuestas online futbol españa|apuestas online golf|apuestas online gratis|apuestas online gratis sin deposito|apuestas online juegos|apuestas online mexico|apuestas online mma|apuestas online
movil|apuestas online nba|apuestas online net|apuestas online nuevas|apuestas online opiniones|apuestas
online paypal|apuestas online peru|apuestas online
seguras|apuestas online sin dinero|apuestas online sin registro|apuestas online
tenis|apuestas online ufc|apuestas online uruguay|apuestas online venezuela|apuestas open britanico golf|apuestas osasuna athletic|apuestas
osasuna barcelona|apuestas osasuna real madrid|apuestas osasuna sevilla|apuestas osasuna valencia|apuestas
over|apuestas over 2.5|apuestas over under|apuestas paginas|apuestas pago anticipado|apuestas paises bajos ecuador|apuestas paises
bajos inglaterra|apuestas países bajos qatar|apuestas para boxeo|apuestas para champions league|apuestas para el clasico|apuestas para el dia de hoy|apuestas para el mundial|apuestas para el partido de
hoy|apuestas para eurocopa|apuestas para europa league|apuestas para futbol|apuestas para ganar|apuestas para ganar dinero|apuestas para ganar dinero facil|apuestas para ganar en la ruleta|apuestas para ganar la champions|apuestas para ganar la eurocopa|apuestas para ganar la europa league|apuestas para ganar la liga|apuestas para ganar siempre|apuestas para hacer|apuestas para
hoy|apuestas para hoy de futbol|apuestas para hoy europa league|apuestas
para hoy futbol|apuestas para juegos|apuestas para
la champions league|apuestas para la copa del rey|apuestas para
la eurocopa|apuestas para la europa league|apuestas para la final de la eurocopa|apuestas para la nba hoy|apuestas para los partidos
de hoy|apuestas para partidos de hoy|apuestas para ufc|apuestas partido|apuestas partido aplazado|apuestas partido champions|apuestas partido colombia|apuestas partido españa marruecos|apuestas partido mundial|apuestas partido suspendido|apuestas partidos|apuestas partidos champions league|apuestas
partidos csgo|apuestas partidos de futbol|apuestas partidos de futbol hoy|apuestas partidos de hoy|apuestas
partidos eurocopa|apuestas partidos futbol|apuestas partidos
hoy|apuestas partidos mundial|apuestas paypal|apuestas peleas de
boxeo|apuestas peru|apuestas perú|apuestas
peru brasil|apuestas peru chile|apuestas peru paraguay|apuestas peru uruguay|apuestas peru vs chile|apuestas peru vs
colombia|apuestas pichichi eurocopa|apuestas plataforma|apuestas playoff|apuestas
playoff ascenso|apuestas playoff ascenso a primera|apuestas playoff
nba|apuestas playoff segunda|apuestas playoff segunda b|apuestas playoffs
nba|apuestas playoffs nfl|apuestas polonia argentina|apuestas por argentina|apuestas por internet mexico|apuestas por internet
para ganar dinero|apuestas por paypal|apuestas por ronda boxeo|apuestas por sistema|apuestas portugal uruguay|apuestas pre partido|apuestas predicciones|apuestas predicciones futbol|apuestas
primera division|apuestas primera division españa|apuestas promociones|apuestas pronostico|apuestas pronosticos|apuestas pronosticos deportivos|apuestas pronosticos deportivos tenis|apuestas pronosticos futbol|apuestas
pronosticos gratis|apuestas pronosticos nba|apuestas pronosticos tenis|apuestas prorroga|apuestas psg barca|apuestas
psg barcelona|apuestas puntos por tarjetas|apuestas puntos
tarjetas|apuestas que aceptan paypal|apuestas que es handicap|apuestas que puedes
hacer con tu novia|apuestas que siempre ganaras|apuestas que significa|apuestas quien bajara a segunda|apuestas quién bajara
a segunda|apuestas quien gana el mundial|apuestas quien gana eurocopa|apuestas quien gana la champions|apuestas quien gana
la eurocopa|apuestas quien gana la liga|apuestas quien ganara el mundial|apuestas quién ganará el
mundial|apuestas quien ganara la champions|apuestas
quien ganara la eurocopa|apuestas quien ganara la liga|apuestas rayo
barcelona|apuestas real madrid|apuestas real madrid arsenal|apuestas real
madrid athletic|apuestas real madrid atletico|apuestas
real madrid atletico champions|apuestas real madrid atletico de madrid|apuestas real madrid atlético de madrid|apuestas real
madrid atletico madrid|apuestas real madrid barcelona|apuestas real madrid bayern|apuestas real madrid betis|apuestas real madrid borussia|apuestas real madrid campeon champions|apuestas real madrid celta|apuestas real
madrid champions|apuestas real madrid city|apuestas real madrid
girona|apuestas real madrid hoy|apuestas real madrid liverpool|apuestas real madrid manchester
city|apuestas real madrid osasuna|apuestas real madrid real sociedad|apuestas real madrid valencia|apuestas
real madrid villarreal|apuestas real madrid vs arsenal|apuestas real madrid vs atletico|apuestas real madrid vs atlético|apuestas real madrid vs atletico madrid|apuestas real
madrid vs barcelona|apuestas real madrid vs betis|apuestas real madrid
vs sevilla|apuestas real madrid vs valencia|apuestas real sociedad|apuestas
real sociedad athletic|apuestas real sociedad barcelona|apuestas real sociedad
betis|apuestas real sociedad psg|apuestas real sociedad real madrid|apuestas real
sociedad valencia|apuestas recomendadas hoy|apuestas regalo de bienvenida|apuestas registro|apuestas resultado exacto|apuestas resultados|apuestas resultados eurocopa|apuestas retirada tenis|apuestas roma
barcelona|apuestas roma sevilla|apuestas rugby|apuestas rugby mundial|apuestas rugby world cup|apuestas ruleta
seguras|apuestas segunda|apuestas segunda b|apuestas segunda division|apuestas segunda división|apuestas segunda division b|apuestas segunda division españa|apuestas
seguras|apuestas seguras baloncesto|apuestas seguras
calculadora|apuestas seguras en la ruleta|apuestas seguras eurocopa|apuestas seguras foro|apuestas seguras futbol|apuestas seguras futbol hoy|apuestas
seguras gratis|apuestas seguras hoy|apuestas seguras hoy futbol|apuestas seguras nba|apuestas seguras nba hoy|apuestas seguras
para este fin de semana|apuestas seguras para ganar dinero|apuestas seguras para hoy|apuestas
seguras para hoy fútbol|apuestas seguras para hoy pronósticos|apuestas seguras para mañana|apuestas seguras ruleta|apuestas seguras telegram|apuestas seguras tenis|apuestas semifinales eurocopa|apuestas senegal paises bajos|apuestas sevilla|apuestas sevilla athletic|apuestas sevilla atletico
de madrid|apuestas sevilla barcelona|apuestas sevilla betis|apuestas sevilla campeon liga|apuestas sevilla celta|apuestas sevilla gana la liga|apuestas sevilla girona|apuestas sevilla
inter|apuestas sevilla jugador|apuestas sevilla juventus|apuestas sevilla leganes|apuestas sevilla madrid|apuestas sevilla manchester united|apuestas sevilla
osasuna|apuestas sevilla real madrid|apuestas sevilla real sociedad|apuestas sevilla roma|apuestas sevilla valencia|apuestas significa|apuestas
simples ejemplos|apuestas simples o combinadas|apuestas sin deposito|apuestas
sin deposito inicial|apuestas sin deposito minimo|apuestas sin dinero|apuestas sin dinero real|apuestas sin empate|apuestas
sin empate que significa|apuestas sin ingreso minimo|apuestas sin registro|apuestas
sistema|apuestas sistema calculadora|apuestas sistema como funciona|apuestas sistema trixie|apuestas sociedad|apuestas sorteo copa del rey|apuestas stake|apuestas stake 10|apuestas
stake 10 hoy|apuestas super bowl favorito|apuestas super rugby|apuestas supercopa españa|apuestas superliga argentina|apuestas tarjeta roja|apuestas tarjetas|apuestas tarjetas amarillas|apuestas tenis|apuestas tenis
atp|apuestas tenis consejos|apuestas tenis copa davis|apuestas
tenis de mesa|apuestas tenis de mesa pronosticos|apuestas tenis en vivo|apuestas tenis femenino|apuestas tenis hoy|apuestas tenis itf|apuestas tenis pronosticos|apuestas
tenis pronósticos|apuestas tenis retirada|apuestas tenis roland garros|apuestas tenis seguras|apuestas tenis wimbledon|apuestas tenis wta|apuestas
tercera division|apuestas tercera division españa|apuestas tipos|apuestas tips|apuestas tipster|apuestas tipster para hoy|apuestas topuria holloway
cuotas|apuestas torneos de golf|apuestas torneos de tenis|apuestas trucos|apuestas uefa champions league|apuestas uefa
europa league|apuestas ufc|apuestas ufc chile|apuestas ufc como funciona|apuestas
ufc hoy|apuestas ufc ilia topuria|apuestas ufc online|apuestas ufc
pronósticos|apuestas ufc telegram|apuestas ufc topuria|apuestas under over|apuestas unionistas villarreal|apuestas uruguay|apuestas uruguay colombia|apuestas uruguay
corea|apuestas uruguay vs colombia|apuestas us open golf|apuestas us open tenis|apuestas valencia|apuestas
valencia barcelona|apuestas valencia betis|apuestas valencia
madrid|apuestas valencia real madrid|apuestas valladolid barcelona|apuestas
valladolid valencia|apuestas valor app|apuestas valor en directo|apuestas valor galgos|apuestas venezuela|apuestas venezuela argentina|apuestas venezuela bolivia|apuestas
venezuela ecuador|apuestas villarreal|apuestas villarreal
athletic|apuestas villarreal barcelona|apuestas villarreal
bayern|apuestas villarreal betis|apuestas villarreal liverpool|apuestas villarreal manchester|apuestas villarreal manchester united|apuestas villarreal vs real madrid|apuestas virtuales|apuestas
virtuales colombia|apuestas virtuales futbol|apuestas virtuales sin dinero|apuestas vivo|apuestas vuelta a españa|apuestas vuelta españa|apuestas william hill partidos de hoy|apuestas y casino|apuestas y casinos|apuestas y juegos
de azar|apuestas y pronosticos|apuestas y pronosticos de futbol|apuestas
y pronosticos deportivos|apuestas y resultados|apuestas-deportivas|apuestas-deportivas.es pronosticos|arbitro nba
apuestas|argentina apuestas|argentina colombia
apuestas|argentina croacia apuestas|argentina francia apuestas|argentina mexico apuestas|argentina
peru apuestas|argentina uruguay apuestas|argentina vs bolivia apuestas|argentina vs chile apuestas|argentina vs colombia apuestas|argentina vs francia apuestas|argentina vs.
colombia apuestas|asi se gana en las apuestas deportivas|asiatico apuestas|asiatico en apuestas|asiaticos apuestas|athletic barcelona apuestas|athletic manchester united apuestas|athletic osasuna apuestas|athletic real madrid apuestas|atletico barcelona apuestas|atletico de madrid apuestas|atlético
de madrid apuestas|atletico de madrid real madrid apuestas|atletico de
madrid vs barcelona apuestas|atletico madrid real madrid apuestas|atletico madrid vs real madrid apuestas|atletico real
madrid apuestas|atletico vs real madrid apuestas|avisador de cuotas apuestas|bajada
de cuotas apuestas|baloncesto apuestas|barbastro barcelona apuestas|barca
apuestas|barca bayern apuestas|barca inter apuestas|barca madrid
apuestas|barça madrid apuestas|barca vs atletico apuestas|barca vs madrid apuestas|barca vs real
madrid apuestas|barcelona – real madrid apuestas|barcelona apuestas|barcelona atletico
apuestas|barcelona atletico de madrid apuestas|barcelona atletico madrid apuestas|barcelona betis apuestas|barcelona casa de apuestas|barcelona
inter apuestas|barcelona psg apuestas|barcelona real madrid apuestas|barcelona real sociedad apuestas|barcelona sevilla
apuestas|barcelona valencia apuestas|barcelona vs athletic bilbao apuestas|barcelona vs atlético madrid
apuestas|barcelona vs betis apuestas|barcelona vs celta de vigo apuestas|barcelona vs espanyol apuestas|barcelona vs girona apuestas|barcelona vs
madrid apuestas|barcelona vs real madrid apuestas|barcelona vs
real sociedad apuestas|barcelona vs sevilla apuestas|barcelona vs villarreal
apuestas|base de datos cuotas apuestas deportivas|bayern real madrid apuestas|beisbol apuestas|best america apuestas|bet apuestas chile|bet apuestas en vivo|betis – chelsea apuestas|betis apuestas|betis barcelona
apuestas|betis chelsea apuestas|betis madrid apuestas|betis sevilla apuestas|betsson tu sitio de apuestas online|blog apuestas baloncesto|blog apuestas ciclismo|blog apuestas nba|blog apuestas
tenis|blog de apuestas de tenis|bono apuestas|bono apuestas deportivas|bono
apuestas deportivas sin deposito|bono apuestas gratis|bono
apuestas gratis sin deposito|bono apuestas sin deposito|bono
bienvenida apuestas|bono bienvenida apuestas deportivas|bono bienvenida apuestas españa|bono bienvenida apuestas sin deposito|bono
bienvenida apuestas sin depósito|bono bienvenida casa apuestas|bono bienvenida casa de apuestas|bono bienvenida
marca apuestas|bono casa apuestas|bono casa de apuestas|bono casa de apuestas sin ingreso|bono casas de apuestas|bono de apuestas|bono de apuestas gratis
sin deposito|bono de bienvenida apuestas|bono de bienvenida
apuestas deportivas|bono de bienvenida casa de apuestas|bono de bienvenida casas de apuestas|bono de casas de apuestas|bono
de registro apuestas|bono de registro apuestas deportivas|bono de registro casa de apuestas|bono gratis apuestas|bono marca apuestas|bono por registro apuestas|bono por registro apuestas deportivas|bono
por registro casa de apuestas|bono registro apuestas|bono sin deposito apuestas|bono sin depósito apuestas|bono sin deposito apuestas deportivas|bono sin depósito apuestas deportivas|bono sin deposito casa de apuestas|bono sin deposito marca apuestas|bono sin ingreso apuestas|bono sin ingreso
apuestas deportivas|bonos apuestas|bonos apuestas colombia|bonos apuestas deportivas|bonos apuestas deportivas sin deposito|bonos apuestas gratis|bonos apuestas sin deposito|bonos apuestas sin depósito|bonos bienvenida apuestas|bonos bienvenida casas apuestas|bonos bienvenida casas de apuestas|bonos casa de apuestas|bonos casas apuestas|bonos
casas de apuestas|bonos casas de apuestas colombia|bonos casas de apuestas deportivas|bonos casas de apuestas españa|bonos casas de apuestas nuevas|bonos casas de apuestas sin deposito|bonos casas de
apuestas sin depósito|bonos de apuestas|bonos de apuestas
deportivas|bonos de apuestas gratis|bonos de apuestas sin deposito|bonos
de bienvenida apuestas|bonos de bienvenida apuestas deportivas|bonos
de bienvenida casa de apuestas|bonos de bienvenida casas de
apuestas|bonos de bienvenida de casas de apuestas|bonos de bienvenida
en casas de apuestas|bonos de casas de apuestas|bonos de casas de apuestas sin deposito|bonos
en casa de apuestas|bonos en casas de apuestas sin deposito|bonos gratis apuestas|bonos gratis
apuestas deportivas|bonos gratis casas de apuestas|bonos gratis sin deposito apuestas|bonos paginas de apuestas|bonos registro casas de
apuestas|bonos sin deposito apuestas|bonos sin depósito apuestas|bonos sin deposito apuestas deportivas|bonos sin deposito casas de apuestas|bot de apuestas deportivas gratis|boxeo apuestas|brasil colombia
apuestas|brasil peru apuestas|brasil vs colombia apuestas|buenas apuestas
para hoy|buscador cuotas apuestas|buscador de apuestas seguras|buscador de cuotas apuestas|buscador de cuotas de apuestas|buscar apuestas seguras|caballos apuestas|calculador de apuestas|calculador de cuotas apuestas|calculadora
apuestas|calculadora apuestas combinadas|calculadora
apuestas de sistema|calculadora apuestas deportivas|calculadora apuestas deportivas seguras|calculadora apuestas multiples|calculadora apuestas segura|calculadora apuestas seguras|calculadora apuestas
sistema|calculadora apuestas yankee|calculadora arbitraje apuestas|calculadora cubrir apuestas|calculadora cuotas apuestas|calculadora de apuestas|calculadora de
apuestas combinadas|calculadora de apuestas de futbol|calculadora de
apuestas de sistema|calculadora de apuestas deportivas|calculadora de apuestas multiples|calculadora de apuestas
seguras|calculadora de apuestas sistema|calculadora
de apuestas surebets|calculadora de arbitraje apuestas|calculadora de cuotas
apuestas|calculadora de cuotas de apuestas|calculadora
para apuestas deportivas|calculadora poisson apuestas|calculadora poisson apuestas deportivas|calculadora poisson para apuestas|calculadora scalping apuestas deportivas|calculadora sistema apuestas|calculadora stake apuestas|calculadora trading apuestas|calcular apuestas|calcular apuestas deportivas|calcular
apuestas futbol|calcular apuestas sistema|calcular cuotas apuestas|calcular cuotas apuestas combinadas|calcular cuotas apuestas deportivas|calcular cuotas
de apuestas|calcular ganancias apuestas deportivas|calcular
momios apuestas|calcular probabilidad cuota apuestas|calcular stake apuestas|calcular unidades apuestas|calcular yield apuestas|calculo de apuestas|calculo de apuestas deportivas|cambio de cuotas apuestas|campeon champions apuestas|campeon eurocopa
apuestas|campeon liga apuestas|campeon nba apuestas|canales de apuestas gratis|carrera de caballos apuestas|carrera de caballos apuestas juego|carrera de caballos con apuestas|carrera de galgos apuestas|carreras de
caballos apuestas|carreras de caballos apuestas online|carreras de caballos
con apuestas|carreras de caballos juegos de apuestas|carreras de galgos apuestas|carreras de galgos apuestas online|carreras de galgos apuestas
trucos|carreras galgos apuestas|casa apuestas argentina|casa apuestas atletico de madrid|casa apuestas barcelona|casa apuestas betis|casa apuestas bono bienvenida|casa apuestas bono gratis|casa apuestas bono sin deposito|casa apuestas cerca de mi|casa apuestas chile|casa apuestas
colombia|casa apuestas con mejores cuotas|casa apuestas deportivas|casa apuestas
españa|casa apuestas española|casa apuestas eurocopa|casa
apuestas futbol|casa apuestas mejores cuotas|casa apuestas mundial|casa apuestas nueva|casa apuestas
nuevas|casa apuestas online|casa apuestas peru|casa apuestas valencia|casa de apuestas|casa de apuestas 10 euros gratis|casa de apuestas argentina|casa de apuestas atletico de
madrid|casa de apuestas baloncesto|casa de apuestas barcelona|casa de apuestas beisbol|casa de
apuestas betis|casa de apuestas bono|casa de apuestas bono
bienvenida|casa de apuestas bono de bienvenida|casa de apuestas bono gratis|casa de
apuestas bono por registro|casa de apuestas bono sin deposito|casa
de apuestas boxeo|casa de apuestas caballos|casa de apuestas carreras de caballos|casa
de apuestas cerca de mi|casa de apuestas cerca de mí|casa de
apuestas champions league|casa de apuestas chile|casa
de apuestas ciclismo|casa de apuestas colombia|casa de apuestas con bono de bienvenida|casa
de apuestas con bono sin deposito|casa de apuestas con cuotas mas altas|casa de apuestas con esports|casa de apuestas con las
mejores cuotas|casa de apuestas con licencia en españa|casa de apuestas con mejores cuotas|casa de apuestas con pago anticipado|casa de apuestas
con paypal|casa de apuestas copa america|casa de apuestas de caballos|casa de apuestas de colombia|casa de apuestas de españa|casa de apuestas
de futbol|casa de apuestas de fútbol|casa de apuestas de futbol peru|casa de apuestas de
peru|casa de apuestas del madrid|casa de apuestas del real madrid|casa de apuestas deportivas|casa
de apuestas deportivas cerca de mi|casa de apuestas deportivas en argentina|casa de
apuestas deportivas en chile|casa de apuestas deportivas en colombia|casa de apuestas deportivas
en españa|casa de apuestas deportivas en madrid|casa
de apuestas deportivas españa|casa de apuestas deportivas españolas|casa de apuestas deportivas madrid|casa de apuestas deportivas mexico|casa de apuestas deportivas online|casa de apuestas deportivas peru|casa
de apuestas deposito 5 euros|casa de apuestas deposito minimo|casa
de apuestas deposito minimo 1 euro|casa de apuestas depósito mínimo 1 euro|casa
de apuestas en españa|casa de apuestas en linea|casa de apuestas en madrid|casa de apuestas
en perú|casa de apuestas en vivo|casa de apuestas españa|casa de apuestas españa inglaterra|casa de apuestas española|casa de
apuestas españolas|casa de apuestas esports|casa de apuestas eurocopa|casa de apuestas europa league|casa de apuestas f1|casa de apuestas formula 1|casa de apuestas futbol|casa de apuestas ingreso minimo|casa de apuestas ingreso minimo 1 euro|casa de apuestas ingreso mínimo 1 euro|casa de apuestas legales|casa de
apuestas legales en colombia|casa de apuestas legales en españa|casa de apuestas libertadores|casa
de apuestas liga española|casa de apuestas madrid|casa de apuestas mas segura|casa de apuestas
mejores|casa de apuestas méxico|casa de apuestas minimo 5 euros|casa de apuestas mlb|casa de apuestas mundial|casa de apuestas nba|casa de apuestas nfl|casa de
apuestas nueva|casa de apuestas nuevas|casa de apuestas oficial del
real madrid|casa de apuestas oficial real madrid|casa de apuestas online|casa de apuestas online
argentina|casa de apuestas online chile|casa de apuestas online
españa|casa de apuestas online mexico|casa de apuestas online
paraguay|casa de apuestas online peru|casa de apuestas
online usa|casa de apuestas online venezuela|casa de apuestas
pago anticipado|casa de apuestas para boxeo|casa de apuestas para
ufc|casa de apuestas peru|casa de apuestas perú|casa de apuestas peru
online|casa de apuestas por paypal|casa de apuestas promociones|casa
de apuestas que regalan dinero|casa de apuestas real madrid|casa de apuestas regalo de bienvenida|casa
de apuestas sevilla|casa de apuestas sin dinero|casa de apuestas sin ingreso minimo|casa de apuestas sin licencia en españa|casa de apuestas sin minimo de ingreso|casa de apuestas stake|casa de
apuestas tenis|casa de apuestas ufc|casa de apuestas valencia|casa
de apuestas venezuela|casa de apuestas virtuales|casa de apuestas vive la suerte|casa oficial de apuestas del real madrid|casas apuestas asiaticas|casas apuestas
bono sin deposito|casas apuestas bonos sin deposito|casas apuestas caballos|casas apuestas chile|casas apuestas ciclismo|casas apuestas con licencia|casas apuestas con licencia en españa|casas apuestas deportivas|casas apuestas deportivas colombia|casas apuestas deportivas españa|casas apuestas
deportivas españolas|casas apuestas deportivas nuevas|casas apuestas españa|casas apuestas españolas|casas apuestas esports|casas apuestas eurocopa|casas apuestas golf|casas apuestas ingreso
minimo 5 euros|casas apuestas legales|casas apuestas legales españa|casas apuestas licencia|casas apuestas licencia españa|casas
apuestas mexico|casas apuestas mundial|casas apuestas nba|casas apuestas nuevas|casas apuestas
nuevas españa|casas apuestas ofertas|casas apuestas
online|casas apuestas paypal|casas apuestas peru|casas apuestas sin licencia|casas apuestas tenis|casas asiaticas apuestas|casas de apuestas|casas de apuestas 5
euros|casas de apuestas app|casas de apuestas argentinas|casas de apuestas asiaticas|casas
de apuestas baloncesto|casas de apuestas barcelona|casas de apuestas bono bienvenida|casas de apuestas bono de bienvenida|casas de apuestas bono
por registro|casas de apuestas bono sin deposito|casas de apuestas bono sin ingreso|casas de apuestas bonos|casas de
apuestas bonos de bienvenida|casas de apuestas bonos gratis|casas de apuestas bonos sin deposito|casas de apuestas boxeo|casas de apuestas caballos|casas de apuestas carreras de caballos|casas de apuestas casino|casas de apuestas casino online|casas de apuestas
cerca de mi|casas de apuestas champions league|casas de
apuestas chile|casas de apuestas ciclismo|casas de apuestas colombia|casas de apuestas com|casas de apuestas con app|casas
de apuestas con apuestas gratis|casas de apuestas con bono|casas de apuestas con bono de bienvenida|casas de apuestas
con bono de registro|casas de apuestas con bono por registro|casas de apuestas
con bono sin deposito|casas de apuestas con bonos|casas de apuestas con bonos gratis|casas
de apuestas con bonos sin deposito|casas de apuestas con deposito minimo|casas
de apuestas con esports|casas de apuestas con handicap asiatico|casas
de apuestas con licencia|casas de apuestas con licencia en españa|casas de apuestas con licencia españa|casas de apuestas con licencia española|casas de apuestas con mejores cuotas|casas de apuestas
con pago anticipado|casas de apuestas con paypal|casas de apuestas con paypal en perú|casas de apuestas con promociones|casas de
apuestas con ruleta en vivo|casas de apuestas copa del rey|casas de
apuestas de caballos|casas de apuestas de españa|casas de apuestas de
futbol|casas de apuestas de fútbol|casas de apuestas de peru|casas de apuestas deportivas|casas de apuestas deportivas asiaticas|casas de apuestas deportivas
colombia|casas de apuestas deportivas comparativa|casas de apuestas deportivas con paypal|casas de apuestas deportivas en chile|casas de apuestas deportivas en españa|casas de
apuestas deportivas en linea|casas de apuestas deportivas en madrid|casas de apuestas deportivas en mexico|casas de apuestas deportivas en peru|casas
de apuestas deportivas en sevilla|casas de apuestas deportivas en valencia|casas
de apuestas deportivas españa|casas de apuestas deportivas españolas|casas
de apuestas deportivas legales|casas de apuestas
deportivas madrid|casas de apuestas deportivas mexico|casas de apuestas deportivas nuevas|casas de apuestas deportivas online|casas de apuestas deportivas peru|casas de apuestas deportivas perú|casas de apuestas deposito minimo 1 euro|casas de apuestas depósito mínimo 1 euro|casas
de apuestas dinero gratis|casas de apuestas en argentina|casas
de apuestas en barcelona|casas de apuestas en chile|casas de apuestas en colombia|casas de apuestas en españa|casas
de apuestas en españa online|casas de apuestas en linea|casas de apuestas en madrid|casas
de apuestas en méxico|casas de apuestas
en peru|casas de apuestas en perú|casas de apuestas
en sevilla|casas de apuestas en uruguay|casas de apuestas en valencia|casas de apuestas en venezuela|casas de apuestas equipos de futbol|casas de apuestas españa|casas de apuestas españa alemania|casas de apuestas españa inglaterra|casas de apuestas españa licencia|casas de apuestas españa nuevas|casas de
apuestas españa online|casas de apuestas española|casas de
apuestas españolas|casas de apuestas españolas con licencia|casas de apuestas españolas online|casas de apuestas esports|casas de apuestas eurocopa|casas de apuestas eurocopa 2024|casas de apuestas europa league|casas de
apuestas f1|casas de apuestas fisicas en barcelona|casas de apuestas fisicas en españa|casas de apuestas formula 1|casas de apuestas fuera de españa|casas de apuestas futbol|casas de apuestas fútbol|casas
de apuestas futbol españa|casas de apuestas ganador eurocopa|casas de apuestas gratis|casas de apuestas ingreso minimo|casas de apuestas ingreso minimo 1 euro|casas
de apuestas ingreso minimo 5 euros|casas de apuestas inter barcelona|casas de apuestas legales|casas de apuestas legales
en colombia|casas de apuestas legales en españa|casas de apuestas legales en mexico|casas de apuestas legales españa|casas de apuestas
legales mx|casas de apuestas licencia|casas de apuestas licencia españa|casas de apuestas lista|casas de apuestas madrid|casas
de apuestas mas seguras|casas de apuestas mejores bonos|casas de apuestas mejores
cuotas|casas de apuestas mexico|casas de apuestas méxico|casas de apuestas minimo 5 euros|casas de apuestas
mlb|casas de apuestas mundial|casas de apuestas mundial baloncesto|casas de apuestas mundiales|casas de apuestas nba|casas de apuestas no reguladas en españa|casas de
apuestas nueva ley|casas de apuestas nuevas|casas
de apuestas nuevas en colombia|casas de apuestas nuevas en españa|casas de apuestas nuevas
españa|casas de apuestas ofertas|casas de apuestas online|casas de apuestas online
argentina|casas de apuestas online colombia|casas
de apuestas online deportivas|casas de apuestas online ecuador|casas de apuestas online en argentina|casas de apuestas online en chile|casas de apuestas online en colombia|casas de apuestas
online en españa|casas de apuestas online en mexico|casas de
apuestas online españa|casas de apuestas online mas
fiables|casas de apuestas online mexico|casas de apuestas online nuevas|casas de apuestas online peru|casas de apuestas
online usa|casas de apuestas online venezuela|casas de
apuestas pago paypal|casas de apuestas para ufc|casas de apuestas paypal|casas de apuestas peru
bono sin deposito|casas de apuestas presenciales en españa|casas de
выберите ресурсы kraken рабочая ссылка onion
бесплатные спины за регистрацию без депозита
кликните сюда кракен даркнет
посмотреть в этом разделе kraken darknet ссылка
Took me time to read all the comments, but I really enjoyed the article. It proved to be Very helpful to me and I am sure to all the commenters here It’s always nice when you can not only be informed, but also entertained I’m sure you had fun writing this article.
можно проверить ЗДЕСЬ kraken onion ссылка
freshstyleboutique.click – Trendy outfits everywhere, enjoyed scrolling through the updated collection today.
This blog post is excellent, probably because of how well the subject was developed. I like some of the comments too.
fashiondailycorner.click – Loved the new styles today, everything feels modern and well arranged now.
кликните сюда кракен даркнет
trendyvaluezone – Stylish products at affordable prices, love the variety here.
Fresh Finds Online – Came across a few items that were truly one-of-a-kind.
этот контент кракен onion
J’adore l’ambiance electrisante de Pokerstars Casino, ca offre un plaisir vibrant. Les options sont aussi vastes qu’un horizon, avec des machines a sous visuellement superbes. Avec des depots fluides. Le suivi est impeccable. Les paiements sont securises et instantanes, occasionnellement quelques spins gratuits en plus seraient top. Pour finir, Pokerstars Casino merite une visite dynamique. Par ailleurs la navigation est simple et intuitive, booste l’excitation du jeu. Un avantage les paiements en crypto rapides et surs, offre des bonus exclusifs.
Aller sur le site|
Лига ставков ставки 1win официальный – это гарантия честной игры и быстрых выплат. Здесь вы можете быть уверены в безопасности своих средств и конфиденциальности личных данных. Это место, где азарт сочетается с надежностью, а победа становится реальностью.
ко ланта
содержание кракен darknet
J’adore la vibe de Stake Casino, ca pulse comme une soiree animee. Les options de jeu sont infinies, avec des slots aux designs captivants. Il offre un coup de pouce allechant. Le support client est irreprochable. Les paiements sont surs et efficaces, par moments des recompenses en plus seraient un bonus. En bref, Stake Casino est un must pour les passionnes. En bonus le design est tendance et accrocheur, permet une immersion complete. Particulierement cool les evenements communautaires engageants, offre des bonus exclusifs.
AccГ©der Г la page|
Je suis enthousiasme par Pokerstars Casino, c’est une plateforme qui pulse avec energie. La variete des jeux est epoustouflante, avec des slots aux designs captivants. Il offre un demarrage en fanfare. Le suivi est d’une fiabilite exemplaire. Les gains sont transferes rapidement, cependant quelques free spins en plus seraient bienvenus. En conclusion, Pokerstars Casino offre une experience hors du commun. De surcroit l’interface est lisse et agreable, incite a rester plus longtemps. Un point fort les competitions regulieres pour plus de fun, qui motive les joueurs.
Lire les dГ©tails|
Je suis epate par Stake Casino, ca transporte dans un monde d’excitation. On trouve une profusion de jeux palpitants, comprenant des titres adaptes aux cryptomonnaies. 100% jusqu’a 500 € plus des tours gratuits. Les agents sont toujours la pour aider. Le processus est transparent et rapide, mais encore des offres plus importantes seraient super. Pour finir, Stake Casino assure un fun constant. Notons egalement le site est rapide et style, apporte une energie supplementaire. A mettre en avant les tournois reguliers pour s’amuser, qui stimule l’engagement.
Jeter un coup d’œil|
J’adore la vibe de Mystake Casino, c’est un lieu ou l’adrenaline coule a flots. Les options de jeu sont incroyablement variees, offrant des sessions live palpitantes. Le bonus de bienvenue est genereux. Le suivi est d’une fiabilite exemplaire. Les gains sont verses sans attendre, mais des offres plus consequentes seraient parfaites. En conclusion, Mystake Casino est un lieu de fun absolu. Pour couronner le tout le site est rapide et style, ce qui rend chaque session plus palpitante. Particulierement fun le programme VIP avec des privileges speciaux, propose des privileges personnalises.
Explorer la page|
J’adore le dynamisme de Casinozer Casino, ca invite a l’aventure. Le catalogue est un paradis pour les joueurs, comprenant des jeux crypto-friendly. Avec des depots rapides et faciles. Disponible 24/7 par chat ou email. Les transactions sont d’une fiabilite absolue, occasionnellement quelques tours gratuits en plus seraient geniaux. Au final, Casinozer Casino offre une experience inoubliable. Pour ajouter le site est rapide et engageant, ajoute une touche de dynamisme. Egalement genial les transactions crypto ultra-securisees, offre des recompenses regulieres.
Commencer ici|
Je suis bluffe par Mystake Casino, on y trouve une energie contagieuse. Le catalogue est un paradis pour les joueurs, avec des machines a sous aux themes varies. 100% jusqu’a 500 € avec des spins gratuits. Les agents sont toujours la pour aider. Les transactions sont toujours fiables, quelquefois des recompenses supplementaires seraient parfaites. Pour conclure, Mystake Casino est un must pour les passionnes. A souligner le design est moderne et energique, apporte une energie supplementaire. A mettre en avant les nombreuses options de paris sportifs, propose des avantages sur mesure.
https://mystakecasinoappfr.com/|
Je suis enthousiasme par Casinozer Casino, ca offre une experience immersive. Le catalogue est un tresor de divertissements, avec des machines a sous aux themes varies. Le bonus initial est super. Le suivi est toujours au top. Les retraits sont fluides et rapides, cependant quelques tours gratuits en plus seraient geniaux. Pour conclure, Casinozer Casino est un choix parfait pour les joueurs. De plus la navigation est claire et rapide, ce qui rend chaque session plus excitante. A noter les transactions crypto ultra-securisees, qui motive les joueurs.
Aller à l’intérieur|
discoverandshop – Great platform for exploring unique items and discovering new favorites.
взгляните на сайте здесь kraken сайт
Программное обеспечение становится умнее кракен darknet kraken darknet market kraken darknet ссылка сайт kraken darknet
бездепозитный бонус с выводом без пополнения
перейдите на этот сайт кракен ссылка onion
этот сайт kraken darknet ссылка
Следующая страница kraken darknet ссылка
Think & Create Spot – Noticed an idea that encouraged exploring different angles.
We’re developing a conference, and it looks like you would be a great speaker.
Фрибет за регистрацию Фрибет за регистрацию – привлекает новых игроков. Мелстрой гейм вызывает разные эмоции.
купить диплом медсестры с занесением в реестр в москве купить диплом медсестры с занесением в реестр в москве .
Промокод при регистрации 1xbet на 32500 рублей. Этот код нужно ввести при регистрации в соответствующее поле. 1Xbet промокод можно использовать только один раз, но им можно делиться с друзьями. Регистрация по номеру телефона — быстрый способ создать аккаунт. После получения данных для входа остаётся лишь ввести логин и пароль. Используй актуальный бесплатные купоны на 1xbet и увеличь первый депозит до 32 500 рублей в БК 1xBet. На платформе действует программа лояльности, которая помогает игрокам получать до повышенного кэшбэка от первого депозита.
globalmarketoutlet – Wide selection of global products, makes shopping interesting and diverse.
Источник kraken ссылка зеркало
airplane money game aviator-game-predict.com .
веб-сайте сайт kraken onion
карниз с приводом https://www.prokarniz36.ru .
бездепозитный бонус игровые автоматы
Je suis completement seduit par Stake Casino, c’est une plateforme qui deborde de dynamisme. Les options de jeu sont incroyablement variees, proposant des jeux de casino traditionnels. 100% jusqu’a 500 € + tours gratuits. Les agents repondent avec efficacite. Le processus est fluide et intuitif, cependant des recompenses supplementaires seraient parfaites. En conclusion, Stake Casino merite un detour palpitant. Pour ajouter la navigation est simple et intuitive, ajoute une vibe electrisante. A signaler les transactions en crypto fiables, propose des avantages sur mesure.
Continuer ici|
J’ai un faible pour Pokerstars Casino, ca invite a plonger dans le fun. Les options de jeu sont incroyablement variees, proposant des jeux de cartes elegants. Il propulse votre jeu des le debut. Les agents sont toujours la pour aider. Les paiements sont securises et instantanes, parfois des bonus plus frequents seraient un hit. Dans l’ensemble, Pokerstars Casino est une plateforme qui fait vibrer. Par ailleurs le design est style et moderne, permet une immersion complete. Un avantage les evenements communautaires pleins d’energie, cree une communaute vibrante.
Voir la page|
этот сайт kraken onion ссылка
страница сайт kraken onion
Цифровизация ускоряет экономику кракен darknet kraken актуальные ссылки кракен ссылка kraken kraken официальные ссылки
Je suis totalement conquis par Pokerstars Casino, il procure une sensation de frisson. Les options sont aussi vastes qu’un horizon, comprenant des titres adaptes aux cryptomonnaies. 100% jusqu’a 500 € avec des spins gratuits. Le suivi est impeccable. Les paiements sont surs et efficaces, mais plus de promotions frequentes boosteraient l’experience. En bref, Pokerstars Casino est un choix parfait pour les joueurs. En plus le design est moderne et attrayant, booste l’excitation du jeu. Egalement excellent les paiements en crypto rapides et surs, cree une communaute vibrante.
Visiter en ligne|
Discount Discovery Hub – Picked up a great offer that made stopping by totally worth it.
J’adore la vibe de Stake Casino, ca offre un plaisir vibrant. Le catalogue de titres est vaste, comprenant des titres adaptes aux cryptomonnaies. Avec des depots rapides et faciles. Le support est fiable et reactif. Les transactions sont fiables et efficaces, bien que des bonus diversifies seraient un atout. Au final, Stake Casino garantit un amusement continu. D’ailleurs la navigation est simple et intuitive, amplifie l’adrenaline du jeu. Particulierement attrayant les tournois reguliers pour la competition, propose des privileges sur mesure.
Continuer ici|
Je suis emerveille par Mystake Casino, ca transporte dans un univers de plaisirs. La selection est riche et diversifiee, comprenant des jeux compatibles avec les cryptos. 100% jusqu’a 500 € + tours gratuits. Le support est fiable et reactif. Les retraits sont lisses comme jamais, quelquefois quelques tours gratuits supplementaires seraient cool. En somme, Mystake Casino offre une experience hors du commun. A mentionner le design est tendance et accrocheur, permet une plongee totale dans le jeu. Un atout le programme VIP avec des recompenses exclusives, qui booste la participation.
DГ©couvrir les offres|
Je suis accro a Casinozer Casino, on ressent une ambiance festive. Le choix est aussi large qu’un festival, comprenant des titres adaptes aux cryptomonnaies. Il offre un demarrage en fanfare. Le suivi est d’une precision remarquable. Les transactions sont d’une fiabilite absolue, bien que des bonus varies rendraient le tout plus fun. Pour finir, Casinozer Casino assure un fun constant. De surcroit le site est rapide et immersif, donne envie de continuer l’aventure. Un plus le programme VIP avec des niveaux exclusifs, garantit des paiements securises.
Ouvrir le site|
globalmarketoutlet – Wide selection of global products, makes shopping interesting and diverse.
Je suis bluffe par Mystake Casino, c’est un lieu ou l’adrenaline coule a flots. Le catalogue est un paradis pour les joueurs, incluant des options de paris sportifs dynamiques. Le bonus de depart est top. Le suivi est impeccable. Le processus est clair et efficace, mais plus de promotions variees ajouteraient du fun. Dans l’ensemble, Mystake Casino est un lieu de fun absolu. Pour couronner le tout le design est moderne et energique, apporte une touche d’excitation. Un plus les competitions regulieres pour plus de fun, renforce le lien communautaire.
Touchez ici|
на этом сайте кракен вход
этот сайт vodkabet прямо сейчас
J’adore le dynamisme de Casinozer Casino, ca donne une vibe electrisante. La variete des jeux est epoustouflante, offrant des tables live interactives. Il rend le debut de l’aventure palpitant. Le support est fiable et reactif. Le processus est fluide et intuitif, par ailleurs plus de promos regulieres ajouteraient du peps. Pour finir, Casinozer Casino assure un fun constant. En plus le site est rapide et style, donne envie de continuer l’aventure. Un avantage notable les evenements communautaires dynamiques, garantit des paiements rapides.
Lire plus|
Лига ставок 1win: Обзор Современной Платформы для Ставок и Игр 1win – это современная и динамично развивающаяся платформа, предлагающая широкий спектр возможностей для любителей ставок на спорт и азартных игр. Компания привлекает пользователей интуитивно понятным интерфейсом, высокими коэффициентами и щедрой бонусной программой. Официальный Сайт и Зеркала Официальный сайт 1win является основным ресурсом для доступа ко всем функциям платформы. В случае блокировки сайта, компания предлагает альтернативные зеркала, которые обеспечивают бесперебойный доступ к услугам 1win. Ставки на Спорт и Киберспорт 1win предоставляет возможность делать ставки на широкий спектр спортивных событий, включая футбол, хоккей, баскетбол, теннис, волейбол и другие популярные виды спорта. Особое внимание уделяется киберспорту, который становится все более популярным среди молодежи. Казино и Live-Казино Помимо ставок на спорт, 1win предлагает широкий выбор азартных игр в онлайн-казино. Здесь можно найти слоты, рулетку, блэкджек, покер и другие популярные игры от ведущих разработчиков. Live-казино позволяет игрокам почувствовать атмосферу реального казино, играя с живыми дилерами. Бонусы и Акции 1win предлагает щедрую бонусную программу для новых и действующих клиентов. Новые игроки могут получить приветственный бонус на первый депозит, а постоянные клиенты участвуют в различных акциях и конкурсах с ценными призами. Мобильное Приложение 1win активно развивает мобильное приложение, которое позволяет делать ставки и играть в казино с мобильных устройств в любое время и в любом месте. Приложение доступно для устройств на базе iOS и Android.
Следующая страница kra какой
такой kraken сайт
ссылка на сайт kra45
на этом сайте vodka bet
читать kra43.at
Продолжение vodka bet
взгляните на сайте здесь vodka bet
бездепозитный бонус игровые автоматы с выводом денег
другие vodka casino
узнать кракен вход
нажмите кракен клир
Облачные сервисы упрощают жизнь компаниям kraken онион кракен darknet кракен onion кракен ссылка onion
globaltrendstore.click – Great site layout, product descriptions were helpful and made choosing easier today.
узнать больше kra43
yourtimeisnow – Motivating site that encourages taking action and embracing opportunities today.
опубликовано здесь vodka casino
нажмите кракен купить
интернет водкабет играть сейчас
подробнее здесь vodka bet
changeyourfuture.click – Content is clear, helpful, and easy to follow for daily improvement.
посетить веб-сайт vodkabet прямо сейчас
перейти на сайт vodkabet прямо сейчас
Следующая страница водкабет играть сейчас
Daily Style Picks Hub – Smooth navigation with items that looked stylish and desirable.
перенаправляется сюда kra45.at
J’adore le dynamisme de Pokerstars Casino, c’est un lieu ou l’adrenaline coule a flots. Il y a un eventail de titres captivants, avec des slots aux designs captivants. Il amplifie le plaisir des l’entree. Le service client est excellent. Le processus est clair et efficace, de temps en temps des bonus plus varies seraient un plus. Au final, Pokerstars Casino offre une experience inoubliable. Notons egalement le site est rapide et immersif, incite a prolonger le plaisir. Un atout les options de paris sportifs diversifiees, qui stimule l’engagement.
Voir le site|
yourdealhub – Excellent deals on quality products, really makes shopping worthwhile.
Программирование — язык нового поколения кракен онион тор kraken актуальные ссылки kraken зеркало kraken ссылка зеркало
интернет kraken вход
Если интересует насос, вот годный ресурс. Заходите: насос.
Информация о покрытия оказалась интересной. Подробности: покрытия.
trendloversplace – Perfect for trend enthusiasts, always something fresh and exciting to see.
J’adore l’ambiance electrisante de Pokerstars Casino, il cree un monde de sensations fortes. Il y a un eventail de titres captivants, proposant des jeux de table sophistiques. Avec des transactions rapides. Le suivi est impeccable. Les paiements sont securises et instantanes, de temps en temps des bonus plus varies seraient un plus. En conclusion, Pokerstars Casino est une plateforme qui fait vibrer. A signaler le design est style et moderne, facilite une immersion totale. Egalement top les transactions en crypto fiables, qui dynamise l’engagement.
Voir la page d’accueil|
beef casino промокод
выберите ресурсы kra45 сс
электронный карниз для штор https://elektrokarniz2.ru .
карниз электроприводом штор купить https://elektrokarniz1.ru .
Источник kra43 сс
beef casino отзывы
сюда kraken market
purefashionchoice – Clean, stylish fashion selections that are both modern and practical.
That is really fascinating, You’re an excessively skilled blogger. I’ve joined your rss feed and look forward to in the hunt for extra of your magnificent post. Additionally, I’ve shared your website in my social networks!
Elegant finds online – Browsing was simple, and the products had a stylish, classy look.
Инновации двигают мир вперёд кракен онион тор kraken зеркало рабочее актуальные зеркала kraken kraken сайт зеркала
beef casino промокоды
здесь водка бет казино
Смотреть здесь водка казино
Смотреть здесь водка бет казино
globalvaluecorner – Amazing value and variety of products from around the world.
посетить сайт казино водка
такой казино водка бет
веб-сайт casino vodka
ссылка на сайт водка бет
интернет vodkabet зеркало
сайт водка бет
зайти на сайт кракен клир
продолжить казино водка
(10 euros gratis apuestas|10 mejores casas de apuestas|10 trucos para
ganar apuestas|15 euros gratis marca apuestas|1×2
apuestas|1×2 apuestas deportivas|1×2 apuestas que significa|1×2 en apuestas|1×2
en apuestas que significa|1×2 que significa en apuestas|5 euros gratis apuestas|9 apuestas que siempre ganaras|a partir de cuanto se declara apuestas|actividades
de juegos de azar y apuestas|ad apuestas deportivas|aleksandre topuria ufc apuestas|algoritmo para
ganar apuestas deportivas|america apuestas|análisis nba apuestas|aplicacion android apuestas deportivas|aplicacion apuestas deportivas|aplicacion apuestas deportivas android|aplicación de apuestas online|aplicacion para hacer apuestas|aplicacion para
hacer apuestas de futbol|aplicación para hacer apuestas de fútbol|aplicaciones apuestas deportivas android|aplicaciones apuestas deportivas gratis|aplicaciones de apuestas android|aplicaciones de apuestas
de fútbol|aplicaciones de apuestas deportivas|aplicaciones de apuestas deportivas peru|aplicaciones
de apuestas deportivas perú|aplicaciones de apuestas en colombia|aplicaciones de apuestas gratis|aplicaciones de apuestas
online|aplicaciones de apuestas seguras|aplicaciones de apuestas sin dinero|aplicaciones para hacer apuestas|apostar seguro apuestas
deportivas|app android apuestas deportivas|app apuestas|app apuestas android|app apuestas de futbol|app
apuestas deportivas|app apuestas deportivas android|app apuestas deportivas argentina|app apuestas
deportivas colombia|app apuestas deportivas ecuador|app apuestas deportivas españa|app apuestas deportivas gratis|app apuestas entre amigos|app apuestas futbol|app apuestas
gratis|app apuestas sin dinero|app casa de apuestas|app casas de apuestas|app control apuestas|app
de apuestas|app de apuestas android|app de apuestas casino|app
de apuestas colombia|app de apuestas con bono
de bienvenida|app de apuestas de futbol|app de apuestas deportivas|app
de apuestas deportivas android|app de apuestas deportivas argentina|app de apuestas
deportivas colombia|app de apuestas deportivas en españa|app de apuestas deportivas peru|app de apuestas deportivas perú|app de apuestas deportivas
sin dinero|app de apuestas ecuador|app de apuestas
en colombia|app de apuestas en españa|app de apuestas en venezuela|app de apuestas
futbol|app de apuestas gratis|app de apuestas online|app de apuestas para
android|app de apuestas para ganar dinero|app de apuestas peru|app de apuestas reales|app de casas de apuestas|app marca apuestas android|app moviles de
apuestas|app para apuestas|app para apuestas de futbol|app para apuestas
deportivas|app para apuestas deportivas en español|app para ganar apuestas deportivas|app para hacer apuestas|app para hacer apuestas
deportivas|app para hacer apuestas entre amigos|app para
llevar control de apuestas|app pronosticos
apuestas deportivas|app versus apuestas|apps apuestas mundial|apps
de apuestas|apps de apuestas con bono de bienvenida|apps de apuestas de futbol|apps de apuestas deportivas peru|apps de apuestas mexico|apps para apuestas|aprender a hacer apuestas deportivas|aprender hacer apuestas deportivas|apuesta del dia apuestas deportivas|apuestas 10 euros gratis|apuestas 100
seguras|apuestas 1×2|apuestas 1X2|apuestas 2 division|apuestas 3 division|apuestas a caballos|apuestas
a carreras de caballos|apuestas a colombia|apuestas
a corners|apuestas a ganar|apuestas a jugadores nba|apuestas a la baja|apuestas
a la nfl|apuestas al barcelona|apuestas al dia|apuestas al empate|apuestas al mundial|apuestas al tenis wta|apuestas alaves barcelona|apuestas alcaraz hoy|apuestas alemania españa|apuestas alonso campeon del mundo|apuestas altas y bajas|apuestas altas y
bajas nfl|apuestas ambos equipos marcan|apuestas america|apuestas android|apuestas anillo nba|apuestas antes del mundial|apuestas anticipadas|apuestas anticipadas nba|apuestas apps|apuestas
arabia argentina|apuestas argentina|apuestas argentina campeon del mundo|apuestas argentina canada|apuestas argentina colombia|apuestas
argentina croacia|apuestas argentina españa|apuestas argentina francia|apuestas argentina francia cuanto paga|apuestas argentina francia mundial|apuestas argentina gana el
mundial|apuestas argentina gana mundial|apuestas argentina holanda|apuestas argentina mexico|apuestas argentina
méxico|apuestas argentina mundial|apuestas argentina online|apuestas argentina paises bajos|apuestas
argentina polonia|apuestas argentina uruguay|apuestas argentina vs australia|apuestas argentina vs colombia|apuestas argentina vs francia|apuestas argentina vs peru|apuestas argentinas|apuestas
arsenal real madrid|apuestas ascenso a primera division|apuestas ascenso a segunda|apuestas asiaticas|apuestas asiatico|apuestas athletic|apuestas athletic atletico|apuestas athletic barça|apuestas
athletic barcelona|apuestas athletic betis|apuestas athletic manchester|apuestas athletic manchester united|apuestas athletic osasuna|apuestas athletic real|apuestas athletic real madrid|apuestas athletic real sociedad|apuestas athletic real sociedad final|apuestas athletic
roma|apuestas athletic sevilla|apuestas athletic valencia|apuestas atletico|apuestas atletico
barcelona|apuestas atletico barsa|apuestas atletico campeon champions|apuestas atletico campeon de liga|apuestas atlético copenhague|apuestas
atletico de madrid|apuestas atlético de madrid|apuestas atletico de madrid barcelona|apuestas atletico de madrid gana la liga|apuestas atletico de
madrid real madrid|apuestas atlético de madrid real madrid|apuestas atletico de madrid vs barcelona|apuestas
atletico madrid|apuestas atletico madrid real madrid|apuestas
atletico madrid vs barcelona|apuestas atletico
real madrid|apuestas atletico real madrid
champions|apuestas atletismo|apuestas bajas|apuestas baloncesto|apuestas baloncesto acb|apuestas baloncesto
handicap|apuestas baloncesto hoy|apuestas baloncesto juegos olimpicos|apuestas baloncesto nba|apuestas baloncesto pronostico|apuestas baloncesto pronósticos|apuestas baloncesto prorroga|apuestas barca|apuestas barca athletic|apuestas barca atletico|apuestas barca bayern|apuestas barca
bayern munich|apuestas barca girona|apuestas barca
hoy|apuestas barça hoy|apuestas barca inter|apuestas barca juventus|apuestas barca madrid|apuestas barça
madrid|apuestas barca real madrid|apuestas barca vs juve|apuestas barca vs madrid|apuestas barca
vs psg|apuestas barcelona|apuestas barcelona alaves|apuestas barcelona athletic|apuestas barcelona atletico|apuestas barcelona atletico
de madrid|apuestas barcelona atlético de madrid|apuestas barcelona atletico madrid|apuestas barcelona bayern|apuestas barcelona betis|apuestas barcelona campeon de liga|apuestas
barcelona celta|apuestas barcelona espanyol|apuestas barcelona gana la champions|apuestas barcelona girona|apuestas barcelona granada|apuestas barcelona
hoy|apuestas barcelona inter|apuestas barcelona madrid|apuestas barcelona osasuna|apuestas barcelona psg|apuestas barcelona real madrid|apuestas barcelona real sociedad|apuestas
barcelona sevilla|apuestas barcelona valencia|apuestas barcelona villarreal|apuestas barcelona vs atletico madrid|apuestas barcelona vs madrid|apuestas barcelona vs real
madrid|apuestas barsa madrid|apuestas basket hoy|apuestas bayern barcelona|apuestas bayern vs barcelona|apuestas
beisbol|apuestas béisbol|apuestas beisbol mlb|apuestas beisbol pronosticos|apuestas beisbol
venezolano|apuestas betis|apuestas betis – chelsea|apuestas betis barcelona|apuestas betis chelsea|apuestas betis fiorentina|apuestas betis girona|apuestas betis madrid|apuestas betis mallorca|apuestas betis real madrid|apuestas betis real
sociedad|apuestas betis sevilla|apuestas betis valencia|apuestas betis valladolid|apuestas betis vs valencia|apuestas
betplay hoy colombia|apuestas betsson peru|apuestas bienvenida|apuestas billar online|apuestas bolivia vs colombia|apuestas bono|apuestas bono bienvenida|apuestas
bono de bienvenida|apuestas bono de bienvenida sin deposito|apuestas bono gratis|apuestas bono
sin deposito|apuestas bonos sin deposito|apuestas borussia real madrid|apuestas boxeo|apuestas boxeo de campeonato|apuestas boxeo españa|apuestas
boxeo español|apuestas boxeo femenino olimpiadas|apuestas boxeo hoy|apuestas boxeo online|apuestas brasil colombia|apuestas
brasil peru|apuestas brasil uruguay|apuestas brasil vs colombia|apuestas brasil vs peru|apuestas caballos|apuestas caballos colocado|apuestas caballos españa|apuestas caballos hipodromo|apuestas caballos hoy|apuestas caballos
madrid|apuestas caballos online|apuestas caballos sanlucar
de barrameda|apuestas caballos zarzuela|apuestas calculador|apuestas campeon|apuestas campeon champions|apuestas campeón champions|apuestas campeon champions 2025|apuestas campeon champions league|apuestas campeon conference league|apuestas campeon copa america|apuestas
campeon copa del rey|apuestas campeon de champions|apuestas campeon de la champions|apuestas campeon de liga|apuestas campeon del
mundo|apuestas campeon eurocopa|apuestas campeón eurocopa|apuestas campeon europa league|apuestas campeon f1|apuestas campeon f1 2025|apuestas campeon formula 1|apuestas campeon libertadores|apuestas campeon liga|apuestas campeon liga bbva|apuestas campeon liga española|apuestas campeon liga santander|apuestas campeon motogp 2025|apuestas campeon mundial|apuestas campeón mundial|apuestas campeon mundial
baloncesto|apuestas campeon nba|apuestas campeón nba|apuestas campeon premier|apuestas campeon premier league|apuestas campeon roland garros|apuestas
campeonato f1|apuestas campeonatos de futbol|apuestas carrera de caballos|apuestas carrera de caballos hoy|apuestas
carrera de caballos nocturnas|apuestas carrera de galgos fin de semana|apuestas
carrera de galgos hoy|apuestas carrera de galgos nocturnas|apuestas carreras caballos|apuestas carreras
caballos sanlucar|apuestas carreras de caballos|apuestas carreras de caballos en directo|apuestas carreras de caballos en vivo|apuestas
carreras de caballos españa|apuestas carreras de caballos hoy|apuestas carreras de caballos nacionales|apuestas carreras de caballos nocturnas|apuestas carreras de caballos online|apuestas carreras de caballos sanlucar|apuestas carreras de
caballos sanlúcar|apuestas carreras de galgos|apuestas carreras de galgos en vivo|apuestas carreras
de galgos nocturnas|apuestas carreras de galgos pre partido|apuestas
casino|apuestas casino barcelona|apuestas casino futbol|apuestas casino gran madrid|apuestas casino
gratis|apuestas casino madrid|apuestas casino online|apuestas casino online argentina|apuestas casinos|apuestas casinos online|apuestas celta|apuestas celta barcelona|apuestas celta betis|apuestas celta eibar|apuestas celta espanyol|apuestas celta granada|apuestas
celta madrid|apuestas celta manchester|apuestas celta real madrid|apuestas champion league|apuestas champions foro|apuestas champions hoy|apuestas champions league|apuestas champions
league – pronósticos|apuestas champions league 2025|apuestas champions league hoy|apuestas champions league pronosticos|apuestas champions league pronósticos|apuestas champions pronosticos|apuestas chelsea barcelona|apuestas chelsea betis|apuestas chile|apuestas chile
peru|apuestas chile venezuela|apuestas chile vs colombia|apuestas chile vs uruguay|apuestas ciclismo|apuestas ciclismo en vivo|apuestas ciclismo femenino|apuestas ciclismo tour francia|apuestas ciclismo vuelta|apuestas ciclismo vuelta a españa|apuestas ciclismo
vuelta españa|apuestas city madrid|apuestas city real madrid|apuestas clasico|apuestas clasico español|apuestas clasico real madrid barcelona|apuestas clasificacion mundial|apuestas colombia|apuestas colombia argentina|apuestas colombia brasil|apuestas colombia paraguay|apuestas colombia uruguay|apuestas colombia vs argentina|apuestas colombia vs brasil|apuestas combinadas|apuestas combinadas como funcionan|apuestas combinadas de futbol|apuestas combinadas
de fútbol|apuestas combinadas foro|apuestas combinadas futbol|apuestas combinadas hoy|apuestas
combinadas mismo partido|apuestas combinadas mundial|apuestas combinadas nba|apuestas combinadas para esta semana|apuestas combinadas para hoy|apuestas combinadas para mañana|apuestas combinadas pronosticos|apuestas combinadas recomendadas|apuestas combinadas seguras|apuestas combinadas seguras para hoy|apuestas combinadas seguras para mañana|apuestas como ganar|apuestas comparador|apuestas con bono de bienvenida|apuestas con dinero ficticio|apuestas con dinero real|apuestas con dinero virtual|apuestas con handicap|apuestas con handicap
asiatico|apuestas con handicap baloncesto|apuestas con mas probabilidades de ganar|apuestas con paypal|apuestas con tarjeta de credito|apuestas con tarjeta de debito|apuestas consejos|apuestas copa|apuestas copa africa|apuestas
copa america|apuestas copa américa|apuestas copa argentina|apuestas copa brasil|apuestas copa davis|apuestas copa de europa|apuestas
copa del mundo|apuestas copa del rey|apuestas copa del
rey baloncesto|apuestas copa del rey final|apuestas copa del rey futbol|apuestas
copa del rey ganador|apuestas copa del rey hoy|apuestas copa del rey
pronosticos|apuestas copa del rey pronósticos|apuestas copa europa|apuestas
copa italia|apuestas copa libertadores|apuestas copa
mundial de hockey|apuestas copa rey|apuestas copa sudamericana|apuestas corners|apuestas corners
hoy|apuestas croacia argentina|apuestas cuartos eurocopa|apuestas cuotas|apuestas cuotas altas|apuestas cuotas bajas|apuestas de 1 euro|apuestas
de baloncesto|apuestas de baloncesto hoy|apuestas de baloncesto nba|apuestas de baloncesto para hoy|apuestas de
beisbol|apuestas de beisbol para hoy|apuestas de blackjack en linea|apuestas de boxeo|apuestas de boxeo canelo|apuestas
de boxeo en las vegas|apuestas de boxeo hoy|apuestas de
boxeo online|apuestas de caballo|apuestas de caballos|apuestas de caballos como funciona|apuestas de caballos como se juega|apuestas de caballos en colombia|apuestas
de caballos en españa|apuestas de caballos en linea|apuestas de caballos españa|apuestas de
caballos ganador y colocado|apuestas de caballos internacionales|apuestas de caballos juegos|apuestas de caballos online|apuestas de caballos online
en venezuela|apuestas de caballos por internet|apuestas de
caballos pronosticos|apuestas de caballos pronósticos|apuestas
de carrera de caballos|apuestas de carreras de caballos|apuestas
de carreras de caballos online|apuestas de casino|apuestas de casino online|apuestas
de casino por internet|apuestas de champions league|apuestas de ciclismo|apuestas
de colombia|apuestas de copa america|apuestas de corners|apuestas de deportes en linea|apuestas de
deportes online|apuestas de dinero|apuestas de esports|apuestas de eurocopa|apuestas de europa
league|apuestas de f1|apuestas de formula 1|apuestas de futbol|apuestas
de fútbol|apuestas de futbol app|apuestas de futbol argentina|apuestas de futbol colombia|apuestas de futbol en colombia|apuestas de futbol en directo|apuestas de futbol en linea|apuestas
de futbol en vivo|apuestas de futbol español|apuestas de futbol gratis|apuestas de futbol hoy|apuestas
de futbol mundial|apuestas de futbol online|apuestas de fútbol online|apuestas
de futbol para hoy|apuestas de fútbol para hoy|apuestas de
futbol para hoy seguras|apuestas de futbol para mañana|apuestas de futbol peru|apuestas de futbol pronosticos|apuestas de fútbol pronósticos|apuestas de futbol seguras|apuestas de futbol seguras para hoy|apuestas de
futbol sin dinero|apuestas de galgos|apuestas de galgos como ganar|apuestas de galgos en directo|apuestas
de galgos online|apuestas de galgos trucos|apuestas de golf|apuestas
de hockey|apuestas de hockey sobre hielo|apuestas de hoy|apuestas de hoy seguras|apuestas de
juego|apuestas de juegos|apuestas de juegos deportivos|apuestas de juegos online|apuestas
de la champions league|apuestas de la copa américa|apuestas
de la eurocopa|apuestas de la europa league|apuestas de
la liga|apuestas de la liga bbva|apuestas de la liga española|apuestas de
la nba|apuestas de la nfl|apuestas de la ufc|apuestas de mlb|apuestas de nba|apuestas de nba para hoy|apuestas de
partidos|apuestas de partidos de futbol|apuestas
de peleas ufc|apuestas de perros en vivo|apuestas de perros virtuales|apuestas de peru|apuestas de sistema|apuestas de sistema como funciona|apuestas de sistema explicacion|apuestas de sistema explicación|apuestas de tenis|apuestas de tenis de
mesa|apuestas de tenis en directo|apuestas de tenis hoy|apuestas de tenis para hoy|apuestas de tenis pronosticos|apuestas de
tenis seguras|apuestas de todo tipo|apuestas de ufc|apuestas
de ufc hoy|apuestas del boxeo|apuestas del clasico|apuestas del clasico real madrid barca|apuestas del dia|apuestas del día|apuestas
del dia de hoy|apuestas del dia deportivas|apuestas del dia futbol|apuestas del
mundial|apuestas del partido de hoy|apuestas del
real madrid|apuestas del rey|apuestas del sistema|apuestas deporte|apuestas deportes|apuestas deportiva|apuestas deportivas|apuestas
deportivas 1 euro|apuestas deportivas 10
euros gratis|apuestas deportivas 100 seguras|apuestas deportivas 1×2|apuestas
deportivas android|apuestas deportivas app|apuestas deportivas apps|apuestas deportivas argentina|apuestas deportivas argentina futbol|apuestas deportivas argentina legal|apuestas deportivas atletico de madrid|apuestas deportivas
baloncesto|apuestas deportivas barca madrid|apuestas deportivas barcelona|apuestas deportivas beisbol|apuestas deportivas bono|apuestas deportivas bono bienvenida|apuestas deportivas bono de
bienvenida|apuestas deportivas bono sin deposito|apuestas deportivas bonos de bienvenida|apuestas deportivas boxeo|apuestas deportivas caballos|apuestas deportivas calculadora|apuestas deportivas campeon liga|apuestas deportivas casino|apuestas deportivas
casino barcelona|apuestas deportivas casino online|apuestas deportivas cerca de mi|apuestas
deportivas champions league|apuestas deportivas chile|apuestas deportivas ciclismo|apuestas deportivas colombia|apuestas deportivas
com|apuestas deportivas com foro|apuestas deportivas com pronosticos|apuestas deportivas combinadas|apuestas deportivas combinadas para hoy|apuestas deportivas como se juega|apuestas deportivas comparador|apuestas
deportivas con bono gratis|apuestas deportivas con bonos gratis|apuestas deportivas con dinero ficticio|apuestas deportivas con paypal|apuestas deportivas con puntos virtuales|apuestas deportivas consejos|apuestas
deportivas consejos para ganar|apuestas deportivas copa america|apuestas deportivas copa del rey|apuestas deportivas copa libertadores|apuestas deportivas copa mundial|apuestas deportivas corners|apuestas
deportivas cual es la mejor|apuestas deportivas cuotas altas|apuestas deportivas de baloncesto|apuestas deportivas de boxeo|apuestas deportivas de colombia|apuestas deportivas de futbol|apuestas deportivas
de nba|apuestas deportivas de nhl|apuestas deportivas de peru|apuestas deportivas de tenis|apuestas deportivas del
dia|apuestas deportivas dinero ficticio|apuestas deportivas directo|apuestas deportivas doble oportunidad|apuestas deportivas en argentina|apuestas deportivas en chile|apuestas deportivas en colombia|apuestas
deportivas en directo|apuestas deportivas en españa|apuestas deportivas en español|apuestas deportivas
en linea|apuestas deportivas en línea|apuestas deportivas en peru|apuestas deportivas en perú|apuestas
deportivas en sevilla|apuestas deportivas en uruguay|apuestas deportivas en vivo|apuestas
deportivas es|apuestas deportivas es pronosticos|apuestas deportivas
españa|apuestas deportivas españolas|apuestas deportivas esports|apuestas deportivas
estadisticas|apuestas deportivas estrategias|apuestas deportivas estrategias seguras|apuestas
deportivas eurocopa|apuestas deportivas europa league|apuestas
deportivas f1|apuestas deportivas faciles de ganar|apuestas deportivas formula 1|apuestas deportivas foro|apuestas deportivas foro
futbol|apuestas deportivas foro tenis|apuestas deportivas francia argentina|apuestas deportivas futbol|apuestas deportivas fútbol|apuestas deportivas futbol argentino|apuestas deportivas futbol colombia|apuestas deportivas futbol español|apuestas deportivas gana|apuestas deportivas ganadas|apuestas deportivas ganar dinero seguro|apuestas deportivas gane|apuestas deportivas golf|apuestas deportivas
gratis|apuestas deportivas gratis con premios|apuestas deportivas gratis hoy|apuestas deportivas gratis sin deposito|apuestas
deportivas handicap|apuestas deportivas handicap asiatico|apuestas
deportivas hoy|apuestas deportivas impuestos|apuestas deportivas interior argentina|apuestas deportivas juegos olimpicos|apuestas deportivas la liga|apuestas deportivas legales|apuestas deportivas legales en colombia|apuestas deportivas libres de impuestos|apuestas deportivas licencia
españa|apuestas deportivas liga española|apuestas deportivas listado|apuestas deportivas listado clasico|apuestas deportivas madrid|apuestas deportivas mas seguras|apuestas deportivas mejor pagadas|apuestas deportivas mejores|apuestas deportivas mejores app|apuestas deportivas
mejores casas|apuestas deportivas mejores cuotas|apuestas deportivas
mejores paginas|apuestas deportivas mexico|apuestas deportivas méxico|apuestas deportivas mlb|apuestas deportivas mlb hoy|apuestas deportivas multiples|apuestas deportivas mundial|apuestas deportivas murcia|apuestas deportivas nba|apuestas deportivas nba hoy|apuestas deportivas nfl|apuestas deportivas
nhl|apuestas deportivas nuevas|apuestas deportivas
ofertas|apuestas deportivas online|apuestas deportivas online argentina|apuestas deportivas online chile|apuestas deportivas online
colombia|apuestas deportivas online en colombia|apuestas deportivas
online españa|apuestas deportivas online mexico|apuestas deportivas online paypal|apuestas deportivas online peru|apuestas
deportivas online por internet|apuestas deportivas pago paypal|apuestas deportivas para ganar dinero|apuestas deportivas para hoy|apuestas
deportivas para hoy pronosticos|apuestas deportivas partido
suspendido|apuestas deportivas partidos de hoy|apuestas deportivas paypal|apuestas deportivas peru|apuestas deportivas
perú|apuestas deportivas peru vs ecuador|apuestas deportivas predicciones|apuestas deportivas promociones|apuestas
deportivas pronostico|apuestas deportivas pronóstico|apuestas
deportivas pronostico hoy|apuestas deportivas pronosticos|apuestas deportivas pronósticos|apuestas deportivas pronosticos expertos|apuestas deportivas pronosticos gratis|apuestas deportivas
pronosticos nba|apuestas deportivas pronosticos tenis|apuestas deportivas que aceptan paypal|apuestas deportivas real madrid|apuestas deportivas regalo bienvenida|apuestas deportivas resultado exacto|apuestas deportivas resultados|apuestas deportivas rugby|apuestas deportivas seguras|apuestas deportivas
seguras foro|apuestas deportivas seguras hoy|apuestas deportivas seguras para hoy|apuestas deportivas seguras telegram|apuestas deportivas
sevilla|apuestas deportivas simulador eurocopa|apuestas deportivas sin deposito|apuestas deportivas sin deposito inicial|apuestas deportivas sin dinero|apuestas deportivas sin dinero real|apuestas deportivas sin registro|apuestas
deportivas stake|apuestas deportivas stake 10|apuestas deportivas telegram españa|apuestas deportivas tenis|apuestas deportivas tenis de mesa|apuestas deportivas tenis foro|apuestas deportivas tenis hoy|apuestas deportivas
tips|apuestas deportivas tipster|apuestas deportivas ufc|apuestas deportivas uruguay|apuestas deportivas valencia|apuestas deportivas
valencia barcelona|apuestas deportivas venezuela|apuestas deportivas virtuales|apuestas deportivas y casino|apuestas deportivas y casino online|apuestas deportivas.com|apuestas deportivas.com foro|apuestas deportivas.es|apuestas deportivos pronosticos|apuestas deposito minimo 1
euro|apuestas descenso a segunda|apuestas descenso a segunda b|apuestas descenso
la liga|apuestas descenso primera division|apuestas descenso segunda|apuestas dia|apuestas diarias seguras|apuestas
dinero|apuestas dinero ficticio|apuestas dinero real|apuestas dinero virtual|apuestas directas|apuestas directo|apuestas directo futbol|apuestas division de
honor juvenil|apuestas dnb|apuestas doble oportunidad|apuestas doble resultado|apuestas dobles|apuestas
dobles y triples|apuestas dortmund barcelona|apuestas draft nba|apuestas draft
nfl|apuestas ecuador vs argentina|apuestas ecuador vs
venezuela|apuestas egipto uruguay|apuestas el clasico|apuestas elecciones venezuela|apuestas empate|apuestas en baloncesto|apuestas en barcelona|apuestas en beisbol|apuestas en boxeo|apuestas en caballos|apuestas en carreras de caballos|apuestas en casino|apuestas en casino online|apuestas en casinos|apuestas en casinos online|apuestas en chile|apuestas en ciclismo|apuestas en colombia|apuestas
en colombia de futbol|apuestas en directo|apuestas en directo futbol|apuestas en directo pronosticos|apuestas en el futbol|apuestas en el tenis|apuestas en españa|apuestas en esports|apuestas en eventos
deportivos virtuales|apuestas en golf|apuestas en juegos|apuestas en la champions league|apuestas
en la eurocopa|apuestas en la liga|apuestas en la nba|apuestas en la nfl|apuestas en las
vegas mlb|apuestas en las vegas nfl|apuestas en linea|apuestas en línea|apuestas en linea argentina|apuestas en linea boxeo|apuestas en linea chile|apuestas en linea colombia|apuestas en línea de fútbol|apuestas en linea deportivas|apuestas en linea españa|apuestas en linea estados unidos|apuestas en linea futbol|apuestas en linea mexico|apuestas en línea méxico|apuestas en linea mundial|apuestas
en linea peru|apuestas en linea usa|apuestas en los esports|apuestas en madrid|apuestas en méxico|apuestas
en mexico online|apuestas en nba|apuestas en partidos de futbol|apuestas
en partidos de futbol en vivo|apuestas en partidos de tenis en directo|apuestas en perú|apuestas en sevilla|apuestas en sistema|apuestas en stake|apuestas en tenis|apuestas en tenis de mesa|apuestas en valencia|apuestas en vivo|apuestas en vivo argentina|apuestas en vivo casino|apuestas en vivo futbol|apuestas en vivo fútbol|apuestas en vivo
nba|apuestas en vivo peru|apuestas en vivo tenis|apuestas en vivo
ufc|apuestas equipo mbappe|apuestas equipos de futbol|apuestas españa|apuestas españa alemania|apuestas españa alemania eurocopa|apuestas españa
croacia|apuestas españa eurocopa|apuestas españa francia|apuestas españa francia eurocopa|apuestas españa gana el mundial|apuestas españa gana eurocopa|apuestas españa gana mundial|apuestas españa georgia|apuestas españa
holanda|apuestas españa inglaterra|apuestas españa inglaterra cuotas|apuestas españa inglaterra
eurocopa|apuestas españa italia|apuestas españa mundial|apuestas
españa paises bajos|apuestas español|apuestas español
oviedo|apuestas espanyol barcelona|apuestas espanyol betis|apuestas espanyol villarreal|apuestas
esport|apuestas esports|apuestas esports colombia|apuestas
esports españa|apuestas esports fifa|apuestas esports
gratis|apuestas esports lol|apuestas esports peru|apuestas
esports valorant|apuestas estadisticas|apuestas
estrategias|apuestas euro|apuestas euro copa|apuestas eurocopa|apuestas
eurocopa campeon|apuestas eurocopa españa|apuestas eurocopa favoritos|apuestas eurocopa femenina|apuestas eurocopa final|apuestas eurocopa ganador|apuestas eurocopa hoy|apuestas eurocopa sub
21|apuestas euroliga baloncesto|apuestas euroliga pronosticos|apuestas europa league|apuestas europa league hoy|apuestas europa league pronosticos|apuestas europa league
pronósticos|apuestas euros|apuestas f1
abu dhabi|apuestas f1 bahrein|apuestas f1 canada|apuestas f1 china|apuestas
f1 cuotas|apuestas f1 hoy|apuestas f1 las vegas|apuestas f1 miami|apuestas f1 monaco|apuestas faciles de ganar|apuestas fáciles
de ganar|apuestas faciles para ganar|apuestas favoritas|apuestas favorito champions|apuestas
favoritos champions|apuestas favoritos eurocopa|apuestas favoritos mundial|apuestas fc
barcelona|apuestas final champions cuotas|apuestas final champions
league|apuestas final champions peru|apuestas final copa|apuestas final copa
america|apuestas final copa de europa|apuestas final copa del
rey|apuestas final copa europa|apuestas final copa libertadores|apuestas final copa rey|apuestas final de copa|apuestas final de copa del rey|apuestas final del mundial|apuestas final euro|apuestas final eurocopa|apuestas
final europa league|apuestas final libertadores|apuestas final mundial|apuestas final
nba|apuestas final rugby|apuestas final uefa europa league|apuestas
final.mundial|apuestas finales de conferencia nfl|apuestas finales nba|apuestas
fiorentina betis|apuestas formula|apuestas formula 1|apuestas fórmula 1|apuestas fórmula 1 pronósticos|apuestas
formula uno|apuestas foro|apuestas foro nba|apuestas francia argentina|apuestas francia españa|apuestas futbol|apuestas fútbol|apuestas futbol americano|apuestas futbol americano nfl|apuestas futbol
argentina|apuestas futbol argentino|apuestas futbol champions
league|apuestas futbol chile|apuestas futbol colombia|apuestas futbol consejos|apuestas futbol en directo|apuestas fútbol en directo|apuestas futbol en vivo|apuestas fútbol en vivo|apuestas futbol
españa|apuestas futbol español|apuestas fútbol español|apuestas
futbol eurocopa|apuestas futbol femenino|apuestas futbol foro|apuestas futbol gratis|apuestas futbol hoy|apuestas fútbol hoy|apuestas futbol juegos olimpicos|apuestas futbol mexico|apuestas futbol mundial|apuestas futbol online|apuestas futbol para hoy|apuestas futbol
peru|apuestas futbol pronosticos|apuestas futbol sala|apuestas futbol telegram|apuestas futbol virtual|apuestas galgos|apuestas galgos en directo|apuestas galgos hoy|apuestas galgos online|apuestas galgos pronosticos|apuestas galgos trucos|apuestas gana|apuestas gana colombia|apuestas gana resultados|apuestas ganadas|apuestas ganadas hoy|apuestas ganador champions league|apuestas ganador copa
america|apuestas ganador copa del rey|apuestas ganador copa del rey baloncesto|apuestas ganador copa libertadores|apuestas ganador de la eurocopa|apuestas ganador de la liga|apuestas ganador
del mundial|apuestas ganador eurocopa|apuestas ganador
europa league|apuestas ganador f1|apuestas ganador la liga|apuestas ganador liga española|apuestas ganador mundial|apuestas ganador mundial baloncesto|apuestas ganador mundial f1|apuestas ganador
nba|apuestas ganadores eurocopa|apuestas ganadores mundial|apuestas ganar champions|apuestas ganar eurocopa|apuestas
ganar liga|apuestas ganar mundial|apuestas ganar nba|apuestas
getafe valencia|apuestas ghana uruguay|apuestas girona|apuestas girona athletic|apuestas
girona betis|apuestas girona campeon de liga|apuestas girona campeon liga|apuestas girona gana la liga|apuestas girona real madrid|apuestas
girona real sociedad|apuestas goleador eurocopa|apuestas goleadores eurocopa|apuestas goles asiaticos|apuestas golf|apuestas golf masters|apuestas golf pga|apuestas
granada barcelona|apuestas grand slam de tenis|apuestas gratis|apuestas gratis casino|apuestas gratis con premios|apuestas gratis hoy|apuestas gratis para hoy|apuestas gratis por
registro|apuestas gratis puntos|apuestas gratis
regalos|apuestas gratis sin deposito|apuestas gratis sin depósito|apuestas gratis
sin ingreso|apuestas gratis sports|apuestas gratis y ganar premios|apuestas grupo a eurocopa|apuestas grupos eurocopa|apuestas handicap|apuestas handicap asiatico|apuestas handicap baloncesto|apuestas handicap como funciona|apuestas handicap nba|apuestas handicap nfl|apuestas
hipicas online|apuestas hípicas online|apuestas
hipicas venezuela|apuestas hockey|apuestas hockey hielo|apuestas hockey patines|apuestas hockey sobre hielo|apuestas holanda
argentina|apuestas holanda vs argentina|apuestas hoy|apuestas
hoy champions|apuestas hoy futbol|apuestas hoy nba|apuestas hoy pronosticos|apuestas hoy seguras|apuestas impuestos|apuestas inglaterra paises bajos|apuestas inter
barca|apuestas inter barcelona|apuestas juego|apuestas juegos|apuestas juegos en linea|apuestas
juegos olimpicos|apuestas juegos olímpicos|apuestas juegos olimpicos
baloncesto|apuestas juegos online|apuestas juegos virtuales|apuestas jugador sevilla|apuestas jugadores nba|apuestas kings league americas|apuestas
la liga|apuestas la liga española|apuestas la liga hoy|apuestas la liga santander|apuestas las
vegas mlb|apuestas las vegas nba|apuestas las vegas nfl|apuestas league of legends mundial|apuestas legal|apuestas legales|apuestas legales en colombia|apuestas
legales en españa|apuestas legales en estados unidos|apuestas legales españa|apuestas leganes betis|apuestas libertadores|apuestas licencia|apuestas liga 1
peru|apuestas liga argentina|apuestas liga bbva pronosticos|apuestas liga de
campeones|apuestas liga de campeones de baloncesto|apuestas liga de campeones de hockey|apuestas liga españa|apuestas liga española|apuestas liga santander pronosticos|apuestas ligas de futbol|apuestas linea|apuestas
linea de gol|apuestas liverpool barcelona|apuestas liverpool real
madrid|apuestas lol mundial|apuestas madrid|apuestas madrid arsenal|apuestas madrid atletico|apuestas madrid atletico champions|apuestas madrid barca|apuestas madrid barça|apuestas madrid
barca hoy|apuestas madrid barca supercopa|apuestas madrid
barcelona|apuestas madrid barsa|apuestas madrid bayern|apuestas madrid betis|apuestas madrid borussia|apuestas madrid campeon champions|apuestas madrid celta|apuestas madrid city|apuestas madrid dortmund|apuestas madrid gana
la liga|apuestas madrid gana liga|apuestas madrid hoy|apuestas madrid liverpool|apuestas madrid osasuna|apuestas madrid sevilla|apuestas madrid
valencia|apuestas madrid vs arsenal|apuestas madrid vs barcelona|apuestas mallorca
osasuna|apuestas mallorca real sociedad|apuestas manchester athletic|apuestas
manchester city real madrid|apuestas mas faciles de ganar|apuestas mas seguras|apuestas mas seguras para hoy|apuestas masters de golf|apuestas masters de tenis|apuestas maximo goleador eurocopa|apuestas
maximo goleador mundial|apuestas mejor jugador eurocopa|apuestas
mejores casinos online|apuestas mexico|apuestas méxico|apuestas mexico polonia|apuestas méxico
polonia|apuestas mlb|apuestas mlb hoy|apuestas mlb las vegas|apuestas mlb para
hoy|apuestas mlb pronosticos|apuestas mlb usa|apuestas mma ufc|apuestas momios|apuestas multiples|apuestas múltiples|apuestas multiples como funcionan|apuestas multiples el gordo|apuestas multiples futbol|apuestas mundial|apuestas mundial 2026|apuestas mundial
baloncesto|apuestas mundial balonmano|apuestas mundial brasil|apuestas mundial campeon|apuestas
mundial ciclismo|apuestas mundial clubes|apuestas mundial de baloncesto|apuestas
mundial de ciclismo|apuestas mundial de clubes|apuestas mundial
de futbol|apuestas mundial de fútbol|apuestas mundial de rugby|apuestas mundial f1|apuestas mundial favoritos|apuestas
mundial femenino|apuestas mundial formula 1|apuestas mundial futbol|apuestas mundial ganador|apuestas mundial lol|apuestas mundial moto gp|apuestas mundial motogp|apuestas mundial rugby|apuestas mundial sub 17|apuestas mundiales|apuestas mundialistas|apuestas mvp eurocopa|apuestas mvp nba|apuestas
mvp nfl|apuestas nacionales de colombia|apuestas nba|apuestas
nba all star|apuestas nba campeon|apuestas nba consejos|apuestas nba esta noche|apuestas nba finals|apuestas
nba gratis|apuestas nba hoy|apuestas nba hoy jugadores|apuestas nba hoy pronosticos|apuestas
nba para hoy|apuestas nba playoffs|apuestas nba pronosticos|apuestas nba pronósticos|apuestas nba pronosticos hoy|apuestas nba tipster|apuestas nfl|apuestas nfl hoy|apuestas
nfl las vegas|apuestas nfl playoffs|apuestas nfl pronosticos|apuestas nfl pronósticos|apuestas nfl semana 4|apuestas nfl super bowl|apuestas nhl|apuestas nhl pronosticos|apuestas octavos eurocopa|apuestas ofertas|apuestas online|apuestas online argentina|apuestas online argentina
legal|apuestas online bono|apuestas online bono bienvenida|apuestas online boxeo|apuestas online caballos|apuestas online carreras de caballos|apuestas online casino|apuestas online
champions league|apuestas online chile|apuestas online ciclismo|apuestas online colombia|apuestas online comparativa|apuestas online con paypal|apuestas online de caballos|apuestas online deportivas|apuestas online
en argentina|apuestas online en peru|apuestas online espana|apuestas online españa|apuestas online esports|apuestas online foro|apuestas online futbol|apuestas online futbol españa|apuestas online golf|apuestas
online gratis|apuestas online gratis sin deposito|apuestas online juegos|apuestas online mexico|apuestas
online mma|apuestas online movil|apuestas online
nba|apuestas online net|apuestas online nuevas|apuestas online opiniones|apuestas online paypal|apuestas online peru|apuestas
online seguras|apuestas online sin dinero|apuestas online
sin registro|apuestas online tenis|apuestas online ufc|apuestas online uruguay|apuestas online venezuela|apuestas open britanico golf|apuestas osasuna athletic|apuestas osasuna barcelona|apuestas osasuna real madrid|apuestas osasuna sevilla|apuestas osasuna valencia|apuestas over|apuestas over 2.5|apuestas over under|apuestas paginas|apuestas pago anticipado|apuestas paises bajos ecuador|apuestas paises bajos inglaterra|apuestas países bajos qatar|apuestas para boxeo|apuestas para champions league|apuestas para el clasico|apuestas para el dia de hoy|apuestas para el mundial|apuestas para el partido de hoy|apuestas para
eurocopa|apuestas para europa league|apuestas para futbol|apuestas para ganar|apuestas para ganar dinero|apuestas para
ganar dinero facil|apuestas para ganar en la ruleta|apuestas para ganar
la champions|apuestas para ganar la eurocopa|apuestas para ganar la europa league|apuestas
para ganar la liga|apuestas para ganar siempre|apuestas para hacer|apuestas para hoy|apuestas para hoy
de futbol|apuestas para hoy europa league|apuestas para hoy futbol|apuestas
para juegos|apuestas para la champions league|apuestas para la
copa del rey|apuestas para la eurocopa|apuestas para la europa league|apuestas para
la final de la eurocopa|apuestas para la nba hoy|apuestas para los partidos
de hoy|apuestas para partidos de hoy|apuestas para ufc|apuestas partido|apuestas partido aplazado|apuestas partido champions|apuestas partido colombia|apuestas partido españa marruecos|apuestas partido
mundial|apuestas partido suspendido|apuestas partidos|apuestas partidos champions league|apuestas partidos
csgo|apuestas partidos de futbol|apuestas partidos de futbol hoy|apuestas partidos de hoy|apuestas
partidos eurocopa|apuestas partidos futbol|apuestas partidos hoy|apuestas
partidos mundial|apuestas paypal|apuestas peleas
de boxeo|apuestas peru|apuestas perú|apuestas peru brasil|apuestas
peru chile|apuestas peru paraguay|apuestas peru uruguay|apuestas
peru vs chile|apuestas peru vs colombia|apuestas pichichi eurocopa|apuestas plataforma|apuestas playoff|apuestas playoff ascenso|apuestas
playoff ascenso a primera|apuestas playoff nba|apuestas
playoff segunda|apuestas playoff segunda b|apuestas playoffs nba|apuestas playoffs nfl|apuestas
polonia argentina|apuestas por argentina|apuestas por internet mexico|apuestas por internet para
ganar dinero|apuestas por paypal|apuestas por ronda boxeo|apuestas por sistema|apuestas portugal uruguay|apuestas pre partido|apuestas predicciones|apuestas predicciones futbol|apuestas primera
division|apuestas primera division españa|apuestas promociones|apuestas pronostico|apuestas pronosticos|apuestas pronosticos
deportivos|apuestas pronosticos deportivos tenis|apuestas pronosticos futbol|apuestas pronosticos gratis|apuestas
pronosticos nba|apuestas pronosticos tenis|apuestas prorroga|apuestas
psg barca|apuestas psg barcelona|apuestas puntos por
tarjetas|apuestas puntos tarjetas|apuestas que aceptan paypal|apuestas que
es handicap|apuestas que puedes hacer con tu novia|apuestas que siempre ganaras|apuestas que significa|apuestas quien bajara a
segunda|apuestas quién bajara a segunda|apuestas quien gana
el mundial|apuestas quien gana eurocopa|apuestas quien gana la champions|apuestas quien gana la eurocopa|apuestas quien gana la liga|apuestas quien ganara el mundial|apuestas quién ganará el mundial|apuestas quien ganara la champions|apuestas
quien ganara la eurocopa|apuestas quien ganara la liga|apuestas rayo barcelona|apuestas real madrid|apuestas real
madrid arsenal|apuestas real madrid athletic|apuestas real madrid atletico|apuestas real madrid atletico champions|apuestas
real madrid atletico de madrid|apuestas real madrid atlético de
madrid|apuestas real madrid atletico madrid|apuestas real
madrid barcelona|apuestas real madrid bayern|apuestas
real madrid betis|apuestas real madrid borussia|apuestas real madrid
campeon champions|apuestas real madrid celta|apuestas real madrid champions|apuestas real madrid city|apuestas real madrid girona|apuestas real madrid hoy|apuestas real madrid liverpool|apuestas real madrid manchester city|apuestas real madrid osasuna|apuestas real madrid real sociedad|apuestas real madrid valencia|apuestas real madrid villarreal|apuestas real madrid vs arsenal|apuestas real madrid
vs atletico|apuestas real madrid vs atlético|apuestas real madrid vs
atletico madrid|apuestas real madrid vs barcelona|apuestas real
madrid vs betis|apuestas real madrid vs sevilla|apuestas real madrid vs valencia|apuestas real sociedad|apuestas
real sociedad athletic|apuestas real sociedad barcelona|apuestas
real sociedad betis|apuestas real sociedad psg|apuestas real sociedad real madrid|apuestas real sociedad valencia|apuestas recomendadas hoy|apuestas regalo de bienvenida|apuestas
registro|apuestas resultado exacto|apuestas resultados|apuestas resultados eurocopa|apuestas retirada tenis|apuestas roma barcelona|apuestas roma sevilla|apuestas rugby|apuestas
rugby mundial|apuestas rugby world cup|apuestas ruleta seguras|apuestas
segunda|apuestas segunda b|apuestas segunda division|apuestas segunda división|apuestas segunda division b|apuestas segunda division españa|apuestas seguras|apuestas seguras baloncesto|apuestas seguras calculadora|apuestas seguras en la ruleta|apuestas seguras eurocopa|apuestas seguras foro|apuestas seguras futbol|apuestas seguras futbol hoy|apuestas seguras gratis|apuestas seguras hoy|apuestas seguras
hoy futbol|apuestas seguras nba|apuestas seguras nba hoy|apuestas seguras
para este fin de semana|apuestas seguras para ganar dinero|apuestas seguras para hoy|apuestas seguras para hoy fútbol|apuestas seguras para hoy
pronósticos|apuestas seguras para mañana|apuestas seguras ruleta|apuestas seguras telegram|apuestas seguras tenis|apuestas semifinales
eurocopa|apuestas senegal paises bajos|apuestas sevilla|apuestas sevilla athletic|apuestas sevilla atletico de madrid|apuestas sevilla barcelona|apuestas sevilla betis|apuestas sevilla campeon liga|apuestas sevilla celta|apuestas sevilla gana la liga|apuestas
sevilla girona|apuestas sevilla inter|apuestas sevilla jugador|apuestas sevilla
juventus|apuestas sevilla leganes|apuestas sevilla madrid|apuestas sevilla
manchester united|apuestas sevilla osasuna|apuestas sevilla real
madrid|apuestas sevilla real sociedad|apuestas
sevilla roma|apuestas sevilla valencia|apuestas significa|apuestas simples ejemplos|apuestas simples
o combinadas|apuestas sin deposito|apuestas sin deposito inicial|apuestas sin deposito minimo|apuestas sin dinero|apuestas sin dinero real|apuestas
sin empate|apuestas sin empate que significa|apuestas sin ingreso minimo|apuestas sin registro|apuestas sistema|apuestas sistema calculadora|apuestas sistema como
funciona|apuestas sistema trixie|apuestas sociedad|apuestas sorteo copa del rey|apuestas stake|apuestas stake 10|apuestas stake 10 hoy|apuestas super bowl favorito|apuestas
super rugby|apuestas supercopa españa|apuestas superliga argentina|apuestas tarjeta roja|apuestas tarjetas|apuestas tarjetas amarillas|apuestas
tenis|apuestas tenis atp|apuestas tenis consejos|apuestas tenis
copa davis|apuestas tenis de mesa|apuestas tenis de mesa pronosticos|apuestas tenis en vivo|apuestas tenis femenino|apuestas tenis hoy|apuestas tenis itf|apuestas tenis pronosticos|apuestas tenis pronósticos|apuestas tenis retirada|apuestas tenis roland garros|apuestas tenis
seguras|apuestas tenis wimbledon|apuestas tenis wta|apuestas tercera division|apuestas
tercera division españa|apuestas tipos|apuestas tips|apuestas tipster|apuestas tipster para hoy|apuestas topuria holloway cuotas|apuestas torneos de golf|apuestas torneos de tenis|apuestas trucos|apuestas uefa champions league|apuestas uefa europa
league|apuestas ufc|apuestas ufc chile|apuestas ufc como funciona|apuestas
ufc hoy|apuestas ufc ilia topuria|apuestas ufc online|apuestas
ufc pronósticos|apuestas ufc telegram|apuestas
ufc topuria|apuestas under over|apuestas unionistas villarreal|apuestas uruguay|apuestas
uruguay colombia|apuestas uruguay corea|apuestas uruguay vs colombia|apuestas us open golf|apuestas us open tenis|apuestas
valencia|apuestas valencia barcelona|apuestas valencia betis|apuestas valencia madrid|apuestas valencia real madrid|apuestas valladolid
barcelona|apuestas valladolid valencia|apuestas valor app|apuestas
valor en directo|apuestas valor galgos|apuestas venezuela|apuestas venezuela argentina|apuestas venezuela bolivia|apuestas venezuela ecuador|apuestas villarreal|apuestas villarreal athletic|apuestas
villarreal barcelona|apuestas villarreal bayern|apuestas villarreal betis|apuestas villarreal liverpool|apuestas villarreal manchester|apuestas villarreal manchester united|apuestas villarreal vs real
madrid|apuestas virtuales|apuestas virtuales colombia|apuestas virtuales futbol|apuestas
virtuales sin dinero|apuestas vivo|apuestas vuelta a españa|apuestas vuelta españa|apuestas william hill partidos de
hoy|apuestas y casino|apuestas y casinos|apuestas y juegos de azar|apuestas y
pronosticos|apuestas y pronosticos de futbol|apuestas y pronosticos deportivos|apuestas y resultados|apuestas-deportivas|apuestas-deportivas.es pronosticos|arbitro nba apuestas|argentina
apuestas|argentina colombia apuestas|argentina croacia apuestas|argentina
francia apuestas|argentina mexico apuestas|argentina peru apuestas|argentina uruguay
apuestas|argentina vs bolivia apuestas|argentina vs chile apuestas|argentina vs colombia apuestas|argentina vs
francia apuestas|argentina vs. colombia apuestas|asi se gana en las
apuestas deportivas|asiatico apuestas|asiatico en apuestas|asiaticos apuestas|athletic barcelona apuestas|athletic manchester united apuestas|athletic osasuna apuestas|athletic real madrid apuestas|atletico barcelona apuestas|atletico de madrid apuestas|atlético de madrid apuestas|atletico
de madrid real madrid apuestas|atletico de madrid vs barcelona apuestas|atletico madrid
real madrid apuestas|atletico madrid vs real madrid apuestas|atletico
real madrid apuestas|atletico vs real madrid apuestas|avisador de cuotas apuestas|bajada de cuotas apuestas|baloncesto
apuestas|barbastro barcelona apuestas|barca apuestas|barca bayern apuestas|barca inter
apuestas|barca madrid apuestas|barça madrid apuestas|barca
vs atletico apuestas|barca vs madrid apuestas|barca vs
real madrid apuestas|barcelona – real madrid apuestas|barcelona apuestas|barcelona atletico
apuestas|barcelona atletico de madrid apuestas|barcelona atletico madrid apuestas|barcelona betis apuestas|barcelona casa de apuestas|barcelona inter apuestas|barcelona
psg apuestas|barcelona real madrid apuestas|barcelona real sociedad apuestas|barcelona sevilla apuestas|barcelona
valencia apuestas|barcelona vs athletic bilbao apuestas|barcelona
vs atlético madrid apuestas|barcelona vs betis apuestas|barcelona vs celta de vigo apuestas|barcelona vs espanyol apuestas|barcelona vs girona apuestas|barcelona vs madrid apuestas|barcelona vs real madrid
apuestas|barcelona vs real sociedad apuestas|barcelona vs sevilla apuestas|barcelona vs
villarreal apuestas|base de datos cuotas apuestas deportivas|bayern real madrid apuestas|beisbol apuestas|best america apuestas|bet apuestas chile|bet apuestas en vivo|betis
– chelsea apuestas|betis apuestas|betis barcelona apuestas|betis chelsea apuestas|betis madrid apuestas|betis sevilla
apuestas|betsson tu sitio de apuestas online|blog
apuestas baloncesto|blog apuestas ciclismo|blog apuestas nba|blog apuestas tenis|blog de apuestas de tenis|bono apuestas|bono apuestas deportivas|bono
apuestas deportivas sin deposito|bono apuestas gratis|bono apuestas gratis
sin deposito|bono apuestas sin deposito|bono bienvenida
apuestas|bono bienvenida apuestas deportivas|bono bienvenida apuestas españa|bono
bienvenida apuestas sin deposito|bono bienvenida apuestas sin depósito|bono bienvenida casa apuestas|bono bienvenida casa de apuestas|bono bienvenida marca apuestas|bono casa apuestas|bono casa de apuestas|bono casa de apuestas sin ingreso|bono casas de
apuestas|bono de apuestas|bono de apuestas
gratis sin deposito|bono de bienvenida apuestas|bono de bienvenida apuestas deportivas|bono
de bienvenida casa de apuestas|bono de bienvenida casas de apuestas|bono de casas de apuestas|bono de registro apuestas|bono de registro apuestas deportivas|bono de registro casa de apuestas|bono gratis apuestas|bono marca apuestas|bono por registro apuestas|bono por
registro apuestas deportivas|bono por registro casa de apuestas|bono registro apuestas|bono sin deposito apuestas|bono sin depósito apuestas|bono sin deposito
apuestas deportivas|bono sin depósito apuestas
deportivas|bono sin deposito casa de apuestas|bono sin deposito marca apuestas|bono sin ingreso apuestas|bono sin ingreso apuestas deportivas|bonos apuestas|bonos apuestas colombia|bonos apuestas deportivas|bonos apuestas deportivas sin deposito|bonos apuestas gratis|bonos apuestas sin deposito|bonos apuestas sin depósito|bonos bienvenida
apuestas|bonos bienvenida casas apuestas|bonos bienvenida casas de apuestas|bonos casa de apuestas|bonos casas apuestas|bonos casas de apuestas|bonos casas de apuestas colombia|bonos casas de apuestas deportivas|bonos casas de apuestas españa|bonos casas de
apuestas nuevas|bonos casas de apuestas sin deposito|bonos casas de apuestas sin depósito|bonos de apuestas|bonos de apuestas deportivas|bonos de
apuestas gratis|bonos de apuestas sin deposito|bonos de
bienvenida apuestas|bonos de bienvenida apuestas deportivas|bonos de bienvenida casa de apuestas|bonos de
bienvenida casas de apuestas|bonos de bienvenida de casas de apuestas|bonos de
bienvenida en casas de apuestas|bonos de casas de apuestas|bonos de casas de apuestas sin deposito|bonos en casa de apuestas|bonos en casas de apuestas sin deposito|bonos gratis apuestas|bonos gratis apuestas deportivas|bonos gratis casas de apuestas|bonos gratis
sin deposito apuestas|bonos paginas de apuestas|bonos registro casas de apuestas|bonos sin deposito apuestas|bonos sin depósito apuestas|bonos sin deposito apuestas
deportivas|bonos sin deposito casas de apuestas|bot de apuestas deportivas gratis|boxeo apuestas|brasil colombia apuestas|brasil peru
apuestas|brasil vs colombia apuestas|buenas apuestas
para hoy|buscador cuotas apuestas|buscador de apuestas seguras|buscador de cuotas
apuestas|buscador de cuotas de apuestas|buscar apuestas seguras|caballos
apuestas|calculador de apuestas|calculador de cuotas apuestas|calculadora apuestas|calculadora apuestas combinadas|calculadora apuestas de sistema|calculadora apuestas deportivas|calculadora apuestas deportivas seguras|calculadora apuestas multiples|calculadora apuestas segura|calculadora apuestas seguras|calculadora apuestas sistema|calculadora apuestas yankee|calculadora
arbitraje apuestas|calculadora cubrir apuestas|calculadora cuotas apuestas|calculadora
de apuestas|calculadora de apuestas combinadas|calculadora
de apuestas de futbol|calculadora de apuestas de sistema|calculadora de apuestas deportivas|calculadora
de apuestas multiples|calculadora de apuestas seguras|calculadora de apuestas sistema|calculadora
de apuestas surebets|calculadora de arbitraje apuestas|calculadora de cuotas apuestas|calculadora de cuotas de apuestas|calculadora para apuestas deportivas|calculadora poisson apuestas|calculadora poisson apuestas deportivas|calculadora poisson para apuestas|calculadora scalping apuestas deportivas|calculadora sistema apuestas|calculadora stake apuestas|calculadora
trading apuestas|calcular apuestas|calcular apuestas deportivas|calcular apuestas futbol|calcular
apuestas sistema|calcular cuotas apuestas|calcular cuotas apuestas combinadas|calcular cuotas apuestas deportivas|calcular cuotas de apuestas|calcular ganancias apuestas
deportivas|calcular momios apuestas|calcular probabilidad cuota apuestas|calcular stake apuestas|calcular unidades apuestas|calcular yield apuestas|calculo de apuestas|calculo de apuestas deportivas|cambio de cuotas apuestas|campeon champions apuestas|campeon eurocopa apuestas|campeon liga apuestas|campeon nba apuestas|canales de apuestas gratis|carrera
de caballos apuestas|carrera de caballos apuestas juego|carrera de caballos con apuestas|carrera de
galgos apuestas|carreras de caballos apuestas|carreras de caballos apuestas
online|carreras de caballos con apuestas|carreras de caballos juegos
de apuestas|carreras de galgos apuestas|carreras de galgos apuestas online|carreras
de galgos apuestas trucos|carreras galgos apuestas|casa apuestas argentina|casa apuestas
atletico de madrid|casa apuestas barcelona|casa apuestas betis|casa apuestas bono bienvenida|casa apuestas bono gratis|casa apuestas bono sin deposito|casa
apuestas cerca de mi|casa apuestas chile|casa apuestas colombia|casa apuestas con mejores cuotas|casa apuestas deportivas|casa apuestas españa|casa apuestas
española|casa apuestas eurocopa|casa apuestas futbol|casa apuestas mejores
cuotas|casa apuestas mundial|casa apuestas nueva|casa apuestas nuevas|casa apuestas online|casa apuestas peru|casa apuestas valencia|casa de apuestas|casa de apuestas 10 euros gratis|casa de apuestas argentina|casa de apuestas atletico
de madrid|casa de apuestas baloncesto|casa de apuestas barcelona|casa de apuestas beisbol|casa de apuestas betis|casa de apuestas bono|casa de apuestas bono
bienvenida|casa de apuestas bono de bienvenida|casa de apuestas bono
gratis|casa de apuestas bono por registro|casa de apuestas bono sin deposito|casa de apuestas boxeo|casa de apuestas caballos|casa
de apuestas carreras de caballos|casa de apuestas cerca de mi|casa de apuestas cerca de mí|casa de
apuestas champions league|casa de apuestas chile|casa
de apuestas ciclismo|casa de apuestas colombia|casa de apuestas con bono de bienvenida|casa de apuestas con bono sin deposito|casa de apuestas con cuotas mas altas|casa de apuestas con esports|casa de apuestas con las mejores cuotas|casa de
apuestas con licencia en españa|casa de apuestas con mejores cuotas|casa de apuestas con pago anticipado|casa de apuestas con paypal|casa de apuestas copa america|casa de
apuestas de caballos|casa de apuestas de colombia|casa de apuestas
de españa|casa de apuestas de futbol|casa de apuestas de fútbol|casa de apuestas de futbol peru|casa de apuestas de peru|casa de
apuestas del madrid|casa de apuestas del real madrid|casa
de apuestas deportivas|casa de apuestas deportivas cerca de mi|casa de apuestas
deportivas en argentina|casa de apuestas deportivas
en chile|casa de apuestas deportivas en colombia|casa de apuestas deportivas en españa|casa de apuestas deportivas en madrid|casa de apuestas deportivas españa|casa de apuestas deportivas españolas|casa de
apuestas deportivas madrid|casa de apuestas deportivas mexico|casa de
apuestas deportivas online|casa de apuestas deportivas
peru|casa de apuestas deposito 5 euros|casa de apuestas deposito minimo|casa de apuestas
deposito minimo 1 euro|casa de apuestas depósito mínimo 1 euro|casa de apuestas en españa|casa de apuestas en linea|casa
de apuestas en madrid|casa de apuestas en perú|casa
de apuestas en vivo|casa de apuestas españa|casa de apuestas españa inglaterra|casa de apuestas española|casa de apuestas españolas|casa de
apuestas esports|casa de apuestas eurocopa|casa de
apuestas europa league|casa de apuestas f1|casa de apuestas formula 1|casa de apuestas futbol|casa de
apuestas ingreso minimo|casa de apuestas ingreso minimo 1 euro|casa
de apuestas ingreso mínimo 1 euro|casa de apuestas legales|casa
de apuestas legales en colombia|casa de apuestas legales en españa|casa de apuestas
libertadores|casa de apuestas liga española|casa de apuestas madrid|casa
de apuestas mas segura|casa de apuestas
mejores|casa de apuestas méxico|casa de apuestas minimo 5 euros|casa de apuestas mlb|casa de apuestas mundial|casa de
apuestas nba|casa de apuestas nfl|casa de apuestas nueva|casa de apuestas nuevas|casa de apuestas oficial del
real madrid|casa de apuestas oficial real madrid|casa de apuestas online|casa de apuestas online argentina|casa de
apuestas online chile|casa de apuestas online españa|casa de apuestas
online mexico|casa de apuestas online paraguay|casa de apuestas online peru|casa de apuestas online usa|casa de apuestas online venezuela|casa de apuestas pago anticipado|casa de apuestas para boxeo|casa de apuestas para ufc|casa de apuestas peru|casa de apuestas perú|casa de
apuestas peru online|casa de apuestas por paypal|casa
de apuestas promociones|casa de apuestas que regalan dinero|casa de apuestas
real madrid|casa de apuestas regalo de bienvenida|casa de
apuestas sevilla|casa de apuestas sin dinero|casa de apuestas
sin ingreso minimo|casa de apuestas sin licencia en españa|casa de
apuestas sin minimo de ingreso|casa de apuestas stake|casa de apuestas tenis|casa de apuestas
ufc|casa de apuestas valencia|casa de apuestas venezuela|casa de apuestas virtuales|casa de apuestas vive la suerte|casa oficial de apuestas del real madrid|casas apuestas asiaticas|casas apuestas bono sin deposito|casas apuestas bonos sin deposito|casas apuestas
caballos|casas apuestas chile|casas apuestas ciclismo|casas apuestas con licencia|casas apuestas con licencia en españa|casas
apuestas deportivas|casas apuestas deportivas colombia|casas apuestas deportivas españa|casas apuestas deportivas españolas|casas
apuestas deportivas nuevas|casas apuestas españa|casas apuestas españolas|casas
apuestas esports|casas apuestas eurocopa|casas apuestas golf|casas
apuestas ingreso minimo 5 euros|casas apuestas legales|casas
apuestas legales españa|casas apuestas licencia|casas apuestas licencia españa|casas apuestas mexico|casas apuestas mundial|casas apuestas
nba|casas apuestas nuevas|casas apuestas nuevas españa|casas
apuestas ofertas|casas apuestas online|casas apuestas paypal|casas apuestas peru|casas apuestas
sin licencia|casas apuestas tenis|casas asiaticas apuestas|casas de
apuestas|casas de apuestas 5 euros|casas de apuestas app|casas de apuestas argentinas|casas de
apuestas asiaticas|casas de apuestas baloncesto|casas de apuestas barcelona|casas de apuestas bono bienvenida|casas de apuestas bono
de bienvenida|casas de apuestas bono por registro|casas de apuestas bono sin deposito|casas de apuestas bono sin ingreso|casas de
apuestas bonos|casas de apuestas bonos de bienvenida|casas de apuestas bonos gratis|casas
de apuestas bonos sin deposito|casas de apuestas boxeo|casas de
apuestas caballos|casas de apuestas carreras de caballos|casas de apuestas casino|casas de apuestas casino online|casas de apuestas
cerca de mi|casas de apuestas champions league|casas
de apuestas chile|casas de apuestas ciclismo|casas de
apuestas colombia|casas de apuestas com|casas de apuestas con app|casas
de apuestas con apuestas gratis|casas de apuestas con bono|casas
de apuestas con bono de bienvenida|casas de apuestas
con bono de registro|casas de apuestas con bono por registro|casas
de apuestas con bono sin deposito|casas de apuestas con bonos|casas de apuestas con bonos gratis|casas de
apuestas con bonos sin deposito|casas de apuestas con deposito minimo|casas de apuestas con esports|casas de apuestas con handicap asiatico|casas de apuestas con licencia|casas de apuestas con licencia en españa|casas de
apuestas con licencia españa|casas de apuestas con licencia española|casas de apuestas con mejores cuotas|casas de apuestas con pago
anticipado|casas de apuestas con paypal|casas de apuestas con paypal
en perú|casas de apuestas con promociones|casas de apuestas con ruleta en vivo|casas de apuestas copa del rey|casas de apuestas de caballos|casas de apuestas de españa|casas
de apuestas de futbol|casas de apuestas de fútbol|casas de apuestas de peru|casas de apuestas deportivas|casas de apuestas deportivas asiaticas|casas de apuestas deportivas colombia|casas de apuestas deportivas
comparativa|casas de apuestas deportivas con paypal|casas de apuestas deportivas en chile|casas de apuestas deportivas en españa|casas de apuestas deportivas en linea|casas de apuestas deportivas en madrid|casas
de apuestas deportivas en mexico|casas de apuestas deportivas en peru|casas
de apuestas deportivas en sevilla|casas de apuestas deportivas en valencia|casas de apuestas deportivas españa|casas de apuestas deportivas españolas|casas de
apuestas deportivas legales|casas de apuestas deportivas madrid|casas de apuestas deportivas mexico|casas de apuestas deportivas nuevas|casas de apuestas deportivas online|casas de apuestas
deportivas peru|casas de apuestas deportivas perú|casas de apuestas deposito minimo 1 euro|casas de apuestas depósito mínimo 1 euro|casas de apuestas dinero gratis|casas de apuestas en argentina|casas de apuestas en barcelona|casas de
apuestas en chile|casas de apuestas en colombia|casas de
apuestas en españa|casas de apuestas en españa
online|casas de apuestas en linea|casas de apuestas en madrid|casas de apuestas en méxico|casas de apuestas en peru|casas de apuestas en perú|casas de apuestas en sevilla|casas de apuestas en uruguay|casas de apuestas
en valencia|casas de apuestas en venezuela|casas de apuestas
equipos de futbol|casas de apuestas españa|casas de apuestas españa
alemania|casas de apuestas españa inglaterra|casas de apuestas españa licencia|casas de
apuestas españa nuevas|casas de apuestas españa online|casas
de apuestas española|casas de apuestas españolas|casas
de apuestas españolas con licencia|casas de apuestas españolas online|casas de apuestas esports|casas de apuestas eurocopa|casas
de apuestas eurocopa 2024|casas de apuestas europa league|casas de apuestas f1|casas de apuestas fisicas en barcelona|casas de
apuestas fisicas en españa|casas de apuestas formula 1|casas de apuestas
fuera de españa|casas de apuestas futbol|casas de apuestas fútbol|casas de
apuestas futbol españa|casas de apuestas ganador eurocopa|casas de apuestas gratis|casas de apuestas ingreso minimo|casas de apuestas ingreso minimo 1 euro|casas de apuestas ingreso minimo 5 euros|casas de apuestas inter barcelona|casas de
apuestas legales|casas de apuestas legales en colombia|casas de apuestas legales en españa|casas de
apuestas legales en mexico|casas de apuestas
legales españa|casas de apuestas legales mx|casas de apuestas licencia|casas
de apuestas licencia españa|casas de apuestas lista|casas de apuestas madrid|casas de apuestas mas seguras|casas de apuestas mejores bonos|casas de apuestas mejores cuotas|casas de apuestas mexico|casas
de apuestas méxico|casas de apuestas minimo 5 euros|casas de apuestas
mlb|casas de apuestas mundial|casas de apuestas mundial
baloncesto|casas de apuestas mundiales|casas de apuestas nba|casas de apuestas no reguladas en españa|casas
de apuestas nueva ley|casas de apuestas nuevas|casas de apuestas nuevas en colombia|casas
de apuestas nuevas en españa|casas de apuestas nuevas españa|casas de
apuestas ofertas|casas de apuestas online|casas de apuestas online argentina|casas de apuestas online colombia|casas de apuestas online deportivas|casas de apuestas online ecuador|casas
de apuestas online en argentina|casas de apuestas online en chile|casas
de apuestas online en colombia|casas de apuestas
online en españa|casas de apuestas online en mexico|casas de apuestas online españa|casas de apuestas online
mas fiables|casas de apuestas online mexico|casas de apuestas online nuevas|casas de apuestas online peru|casas
de apuestas online usa|casas de apuestas online venezuela|casas de apuestas pago paypal|casas de apuestas para ufc|casas
Перейти на сайт казино водка бет
узнать больше vodka bet
содержание водка бет
посетить сайт casino vodka
посмотреть в этом разделе казино водка бет
читать casino vodka
подробнее здесь казино водка бет
нажмите, чтобы подробнее водка казино
каталог водка казино
Читать далее водка бет
узнать больше Здесь vodkabet
everydayessentials – Convenient site to find daily essentials quickly and easily.
australia cigerettes
Australia Cig Delivery emerged as a credible online tobacco retailer in Australia. Established in 2024, the service quickly earned customer trust through competitive pricing and fast shipping. The company prioritises customer ease with: Free delivery across Australia, no minimum order; Day-of processing for orders before 5:00 AM (AET); Discreet packaging with no markings of contents; Versatile payments: USDT.
Why Choose Australian Cigarette Delivery? A licensed store dedicated to authentic products at competitive prices. All items comply with Australian regulations. Sales for adults 18+ only. The available brands include a broad range: Marlboro — globally admired for smooth taste (includes Gold); the brand — delicate to cool-flavoured blends; Benson & Hedges — premium with refined flavour; Dunhill — British-origin with cultured experience; Double Happiness — classic Asian brand with rich fragrance.
Common Questions: Delivery times? Orders before 5:00 AM (AET) sent same day. Delivery takes 2–5 business days. Ship abroad? Delivery available only within the nation. Track orders? Tracking number provided via email after dispatch. Payment methods? Accept PayPal. All payments handled securely. Return policy? Returns for flaws only. Unopened items not refunded for change of mind. Annul orders? Annulled only before execution. Reach support? Available seven days. Inquiries via email, responses within hours.
Summary: Australia Tobacco Service excells through authenticity and value. With day-of processing, free shipping and private packaging, it offers a trustworthy solution for adult smokers. Sales strictly for 18+ persons.
на этом сайте casino vodka
посмотреть в этом разделе водка бет
такой казино водка бет
Подробнее vodka bet
Smart Finds Online – Smooth navigation with products that felt thoughtfully selected.
Следующая страница vodka bet
на этом сайте водка бет
beef casino официальный сайт
другие водка казино
узнать больше vodkabet
электрокарнизы для штор цена электрокарнизы для штор цена .
нажмите vodka bet
найти это casino vodka
опубликовано здесь vodkabet
узнать больше Здесь vodkabet
здесь casino vodka
взгляните на сайте здесь vodka bet
Подробнее здесь водка бет
findyournextgoal.click – Really helpful tips, encourages consistent progress toward personal growth every single day.
Your thing regarding creating will be practically nothing in short supply of awesome. This informative article is incredibly useful and contains offered myself a better solution to be able to my own issues. Which can be the specific purpose MY PARTNER AND I has been doing a search online. I am advocating this informative article with a good friend. I know they are going to get the write-up since beneficial as i would. Yet again many thanks.
dailydealsplace – Always updated with great bargains, love checking in daily.
веб-сайт водка казино
Читать далее водка бет
посмотреть на этом сайте казино водка бет
здесь casino vodka
читать vodkabet
найти это vodka bet
Читать далее казино водка бет
I like your quality that you put into your writing . Please do continue with more like this.
This is something that will need all of our combined efforts to address.
globaltrendstore.click – Products arrived quickly, packaging was neat, very happy with overall service.
Je suis epate par Stake Casino, on ressent une ambiance festive. Il y a une abondance de jeux excitants, offrant des tables live interactives. Il donne un avantage immediat. Les agents sont toujours la pour aider. Les retraits sont ultra-rapides, occasionnellement plus de promotions variees ajouteraient du fun. Dans l’ensemble, Stake Casino est un lieu de fun absolu. A signaler l’interface est simple et engageante, permet une immersion complete. A signaler les tournois frequents pour l’adrenaline, cree une communaute vibrante.
Continuer Г lire|
можно проверить ЗДЕСЬ водка бет
J’adore l’energie de Stake Casino, on y trouve une vibe envoutante. La bibliotheque de jeux est captivante, avec des slots aux designs captivants. Il propulse votre jeu des le debut. Le suivi est d’une precision remarquable. Les gains arrivent sans delai, cependant quelques tours gratuits supplementaires seraient cool. Pour faire court, Stake Casino est une plateforme qui pulse. Par ailleurs le site est rapide et style, ajoute une touche de dynamisme. Egalement genial les tournois reguliers pour la competition, propose des avantages sur mesure.
Aller sur le site|
кликните сюда casino vodka
взгляните на сайте здесь vodkabet
Узнать больше vodkabet зеркало
J’adore le dynamisme de Pokerstars Casino, il cree un monde de sensations fortes. La bibliotheque de jeux est captivante, proposant des jeux de cartes elegants. Il offre un coup de pouce allechant. Les agents sont toujours la pour aider. Les transactions sont d’une fiabilite absolue, a l’occasion des recompenses en plus seraient un bonus. Dans l’ensemble, Pokerstars Casino offre une experience hors du commun. Pour couronner le tout la navigation est fluide et facile, facilite une experience immersive. Particulierement cool le programme VIP avec des privileges speciaux, garantit des paiements rapides.
Commencer maintenant|
Цифровая трансформация ускоряет развитие kraken актуальные ссылки kraken маркетплейс зеркало кракен ссылка кракен даркнет
J’adore le dynamisme de Stake Casino, on ressent une ambiance festive. La gamme est variee et attrayante, comprenant des jeux compatibles avec les cryptos. 100% jusqu’a 500 € avec des spins gratuits. Disponible a toute heure via chat ou email. Les transactions sont d’une fiabilite absolue, quelquefois des offres plus consequentes seraient parfaites. En fin de compte, Stake Casino est un incontournable pour les joueurs. Ajoutons que le site est rapide et immersif, incite a prolonger le plaisir. Particulierement interessant les evenements communautaires pleins d’energie, propose des avantages uniques.
Visiter pour plus|
Продолжение vodka bet
J’ai une passion debordante pour Pokerstars Casino, ca invite a l’aventure. Le catalogue de titres est vaste, comprenant des jeux optimises pour Bitcoin. 100% jusqu’a 500 € avec des spins gratuits. Disponible 24/7 pour toute question. Les transactions sont toujours fiables, neanmoins quelques spins gratuits en plus seraient top. Pour finir, Pokerstars Casino est un endroit qui electrise. En bonus la navigation est fluide et facile, amplifie l’adrenaline du jeu. Un avantage notable les tournois reguliers pour s’amuser, garantit des paiements rapides.
Passer à l’action|
Узнать больше казино водка
Je suis fascine par Mystake Casino, il propose une aventure palpitante. La bibliotheque de jeux est captivante, incluant des paris sportifs pleins de vie. Il donne un elan excitant. Les agents repondent avec rapidite. Le processus est transparent et rapide, a l’occasion des recompenses supplementaires dynamiseraient le tout. Pour conclure, Mystake Casino garantit un plaisir constant. Ajoutons aussi la navigation est intuitive et lisse, donne envie de continuer l’aventure. Un avantage notable les paiements securises en crypto, propose des privileges personnalises.
https://mystakecasino366fr.com/|
learncreategrow – Inspiring content that encourages learning, creating, and personal growth.
Global Trend Hub – Easy-to-browse categories with fashionable and well-curated products.
перенаправляется сюда водка бет регистрация
Je suis fascine par Casinozer Casino, on ressent une ambiance de fete. La selection de jeux est impressionnante, proposant des jeux de table classiques. Il booste votre aventure des le depart. Le support est fiable et reactif. Les gains arrivent sans delai, en revanche des bonus diversifies seraient un atout. En bref, Casinozer Casino est un incontournable pour les joueurs. Notons aussi le site est rapide et style, booste l’excitation du jeu. Un point cle le programme VIP avec des recompenses exclusives, propose des avantages sur mesure.
DГ©couvrir davantage|
нажмите здесь водка бет казино
выберите ресурсы водка бет регистрация
Je suis emerveille par Mystake Casino, il cree un monde de sensations fortes. La selection de jeux est impressionnante, proposant des jeux de cartes elegants. Il offre un demarrage en fanfare. Le service client est excellent. Le processus est simple et transparent, bien que des recompenses additionnelles seraient ideales. Pour conclure, Mystake Casino est un incontournable pour les joueurs. En bonus l’interface est simple et engageante, amplifie l’adrenaline du jeu. Egalement genial les paiements securises en crypto, renforce le lien communautaire.
Avancer|
ссылка на сайт vodka bet
Je suis accro a Casinozer Casino, ca offre une experience immersive. Les jeux proposes sont d’une diversite folle, offrant des tables live interactives. Le bonus de depart est top. Le support est fiable et reactif. Les transactions sont toujours fiables, par moments plus de promos regulieres dynamiseraient le jeu. Globalement, Casinozer Casino offre une aventure inoubliable. Ajoutons que la navigation est claire et rapide, permet une immersion complete. Un bonus les transactions en crypto fiables, garantit des paiements securises.
Trouver les dГ©tails|
Узнать больше водка бет регистрация
Innovation Hub Daily – Tools and ideas for exploring creativity and making things happen.
интернет водка казино
взгляните на сайте здесь vodka bet
подробнее casino vodka
продолжить vodkabet
Перейти на сайт vodkabet зеркало
J’adore l’energie de Pokerstars Casino, c’est un lieu ou l’adrenaline coule a flots. La selection est riche et diversifiee, proposant des jeux de table classiques. Avec des depots fluides. Le support est efficace et amical. Les retraits sont ultra-rapides, de temps en temps des offres plus genereuses rendraient l’experience meilleure. Pour finir, Pokerstars Casino est un lieu de fun absolu. En bonus le site est fluide et attractif, apporte une touche d’excitation. Egalement genial les options de paris sportifs diversifiees, propose des privileges sur mesure.
Visiter aujourd’hui|
Je suis sous le charme de Stake Casino, on ressent une ambiance de fete. On trouve une profusion de jeux palpitants, comprenant des jeux compatibles avec les cryptos. Avec des transactions rapides. Disponible 24/7 par chat ou email. Le processus est simple et transparent, parfois des offres plus genereuses rendraient l’experience meilleure. Dans l’ensemble, Stake Casino assure un fun constant. En bonus la plateforme est visuellement electrisante, booste l’excitation du jeu. Un point fort les evenements communautaires dynamiques, offre des recompenses continues.
Parcourir le site|
Срочно переведём документы – заверенный перевод документов самара. Перевод налоговых документов. Самарское бюро. Нотариальное заверение. Срочно и качественно. Опытные специалисты.
growtogetherstrong – Positive and motivating, perfect for teamwork and community growth.
Подробнее здесь казино водка бет
J’ai une affection particuliere pour Pokerstars Casino, c’est une plateforme qui deborde de dynamisme. Les options de jeu sont incroyablement variees, incluant des paris sportifs en direct. Il rend le debut de l’aventure palpitant. Les agents repondent avec rapidite. Les paiements sont surs et fluides, bien que des bonus diversifies seraient un atout. En resume, Pokerstars Casino est un lieu de fun absolu. Notons egalement le design est style et moderne, ajoute une touche de dynamisme. A signaler les transactions en crypto fiables, assure des transactions fluides.
En savoir plus|
Je suis captive par Stake Casino, ca transporte dans un univers de plaisirs. On trouve une gamme de jeux eblouissante, proposant des jeux de table sophistiques. Il rend le debut de l’aventure palpitant. Le support est rapide et professionnel. Les paiements sont securises et instantanes, par ailleurs des bonus plus varies seraient un plus. Au final, Stake Casino offre une experience hors du commun. Notons egalement le site est rapide et engageant, amplifie l’adrenaline du jeu. Particulierement fun le programme VIP avec des recompenses exclusives, offre des recompenses regulieres.
Essayer maintenant|
On the topic “Exploring the crypto industry with AI: one step ahead of the market”, found a lot of useful stuff.
Вот, делюсь ссылкой:
https://kitchentechy.com
Je suis accro a Mystake Casino, ca invite a l’aventure. La variete des jeux est epoustouflante, avec des machines a sous visuellement superbes. Le bonus initial est super. Le support est fiable et reactif. Les paiements sont securises et instantanes, malgre tout des recompenses en plus seraient un bonus. En bref, Mystake Casino vaut une exploration vibrante. Par ailleurs le site est rapide et engageant, donne envie de prolonger l’aventure. Egalement excellent les paiements securises en crypto, propose des privileges personnalises.
https://mystakecasino366fr.com/|
сюда vodkabet зеркало
узнать больше vodka bet
Je suis accro a Mystake Casino, il cree un monde de sensations fortes. La bibliotheque est pleine de surprises, incluant des options de paris sportifs dynamiques. Il amplifie le plaisir des l’entree. Disponible 24/7 pour toute question. Les paiements sont securises et rapides, quelquefois plus de promos regulieres ajouteraient du peps. Au final, Mystake Casino vaut une visite excitante. En plus l’interface est lisse et agreable, booste le fun du jeu. Egalement super les paiements en crypto rapides et surs, offre des recompenses regulieres.
Entrer sur le site|
J’ai une passion debordante pour Casinozer Casino, ca transporte dans un monde d’excitation. Les options de jeu sont infinies, comprenant des jeux compatibles avec les cryptos. 100% jusqu’a 500 € plus des tours gratuits. Le support est pro et accueillant. Les retraits sont ultra-rapides, cependant des recompenses supplementaires dynamiseraient le tout. En resume, Casinozer Casino est un endroit qui electrise. Notons egalement l’interface est lisse et agreable, ce qui rend chaque partie plus fun. Un plus les tournois reguliers pour s’amuser, qui motive les joueurs.
Ouvrir le site|
Узнать больше vodkabet зеркало
взгляните на сайте здесь casino vodka
Работаем с юридическими лицами – перевод документов тольятти. Перевод документов в Самаре любой сложности. Нотариальное заверение, срочно. Гарантия принятия в учреждениях. Звоните!
узнать vodka bet
нажмите здесь водка бет
Assume you are doing good linking to position you on the first pages of search engines.
Just wanna admit that this is extremely helpful, Thanks for taking your time to write this.
смотреть здесь vodka bet
InspireAndAchieve – Motivational tips showcased, makes pursuing goals feel simple and rewarding.
buildyourownfuture – Great motivational site, helps focus on goals and planning ahead.
learnwithoutlimits.shop – Helpful insights here, perfect for anyone aiming to expand knowledge consistently.
узнать больше Здесь водка бет казино
опубликовано здесь казино водка
подробнее казино водка
нажмите https://cerberus-veitrf.ru/
подробнее здесь https://cerberus-veitrf.ru/
TrendyVibesHub – Unique style items displayed, navigating the collections was simple and enjoyable.
веб-сайт https://cerberus-veitrf.ru
подробнее https://cerberus-veitrf.ru/
creativegiftoutlet – Amazing gift ideas, really unique and thoughtful selections available here.
взгляните на сайте здесь https://cerberus-veitrf.ru
сайт https://cerberus-veitrf.ru/
здесь https://cerberus-veitrf.ru/
On the topic “Step-by-Step Financial Guides for a Secure Future”, it’s a treasure trove of information.
Смотрите сами:
https://codefortots.com
ValueVisionShop – Found top deals, exploring items was smooth and fun.
узнать больше Здесь https://cerberus-veitrf.ru
проверить сайт https://cerberus-veitrf.ru
посмотреть на этом сайте https://cerberus-veitrf.ru/
интернет https://cerberus-veitrf.ru/
shopforvalue – Affordable products without compromising quality, makes shopping super satisfying.
сюда https://cerberus-veitrf.ru
рок группа позавчера Музыка “Позавчера” – это саундтрек к воспоминаниям, мелодии, которые трогают душу и заставляют задуматься о прошлом, настоящем и будущем. Это музыка для тех, кто ценит глубину и искренность в каждой ноте.
QuickFindsMarket – Amazing items highlighted, exploring new products was smooth and effortless.
в этом разделе https://cerberus-veitrf.ru/
позавчера рок “Позавчера” как рок группа – это вызов конформизму, гимн свободе и самовыражению. Их музыка – это бунт против серости и обыденности, призыв к действию, вдохновляющий на перемены и новые свершения. Каждый аккорд – это искра, зажигающая огонь в сердцах слушателей.
посмотреть на этом сайте https://cerberus-veitrf.ru
growbeyondlimits – Encouraging platform that inspires personal growth and pushing boundaries every day.
музыка позавчера “Позавчера рок” – это симбиоз традиций и инноваций, смелый эксперимент со звуком, где классические риффы переплетаются с современными электронными элементами. Они не боятся нарушать правила, идя своим собственным путем и создавая уникальное звучание.
сюда https://cerberus-veitrf.ru/
ссылка на сайт https://cerberus-veitrf.ru/
SmartSavingsOnline – Top offers showcased, browsing the site was smooth and easy.
Je suis sous le charme de Pokerstars Casino, on y trouve une energie contagieuse. Il y a un eventail de titres captivants, incluant des options de paris sportifs dynamiques. Le bonus initial est super. Les agents sont rapides et pros. Les paiements sont securises et instantanes, mais encore des recompenses additionnelles seraient ideales. En bref, Pokerstars Casino offre une experience hors du commun. Par ailleurs la plateforme est visuellement electrisante, ce qui rend chaque partie plus fun. Egalement super les evenements communautaires engageants, propose des avantages sur mesure.
Plonger dedans|
содержание https://cerberus-veitrf.ru/
dreamfashionfinds – Stylish and trendy fashion finds that make everyday shopping fun.
этот контент https://cerberus-veitrf.ru
Следующая страница https://cerberus-veitrf.ru/
посмотреть в этом разделе https://cerberus-veitrf.ru
перейдите на этот сайт https://cerberus-veitrf.ru/
HappyHomeSpot – Lovely home products featured, browsing categories was smooth and natural.
Перейти на сайт https://cerberus-veitrf.ru/
музыка позавчера “Позавчера рок” – это переосмысление классики, смелый эксперимент со звуком, где традиции гитарного рока встречаются с инновационными музыкальными решениями. Они не боятся идти против течения, ломать стереотипы и создавать что-то принципиально новое, сохраняя при этом верность корням.
Je suis enthousiaste a propos de Pokerstars Casino, ca offre un plaisir vibrant. Le catalogue est un tresor de divertissements, avec des slots aux designs captivants. Le bonus de bienvenue est genereux. Le suivi est impeccable. Les transactions sont toujours securisees, bien que des recompenses supplementaires dynamiseraient le tout. En resume, Pokerstars Casino est une plateforme qui fait vibrer. Ajoutons que l’interface est lisse et agreable, donne envie de continuer l’aventure. A noter les evenements communautaires dynamiques, qui booste la participation.
Explorer davantage|
проверить сайт https://kra46a.at
веб-сайт https://kra46a.at/
опубликовано здесь https://kra46a.at
пояснения https://kra46a.at
J’adore la vibe de Stake Casino, c’est un lieu ou l’adrenaline coule a flots. Les options de jeu sont infinies, offrant des sessions live immersives. Il propulse votre jeu des le debut. Le service d’assistance est au point. Le processus est clair et efficace, en revanche des offres plus importantes seraient super. Au final, Stake Casino offre une experience inoubliable. De plus la plateforme est visuellement captivante, ce qui rend chaque session plus palpitante. Particulierement interessant le programme VIP avec des privileges speciaux, renforce le lien communautaire.
Voir plus|
на этом сайте https://kra46a.at/
перейдите на этот сайт https://kra46a.at/
smartbuyplace – Excellent place to find smart deals and quality products efficiently.
Je ne me lasse pas de Pokerstars Casino, c’est une plateforme qui pulse avec energie. La bibliotheque est pleine de surprises, comprenant des titres adaptes aux cryptomonnaies. 100% jusqu’a 500 € avec des free spins. Le service client est excellent. Les transactions sont d’une fiabilite absolue, neanmoins des offres plus importantes seraient super. Au final, Pokerstars Casino assure un divertissement non-stop. En bonus le design est style et moderne, donne envie de prolonger l’aventure. Egalement top les transactions crypto ultra-securisees, garantit des paiements rapides.
Obtenir plus|
выберите ресурсы https://kra46a.at
такой https://kra46a.at
Подробнее здесь https://kra46a.at
выберите ресурсы https://kra46a.at/
можно проверить ЗДЕСЬ https://kra46a.at
Je suis fascine par Stake Casino, il propose une aventure palpitante. La gamme est variee et attrayante, comprenant des jeux optimises pour Bitcoin. Il donne un avantage immediat. Le suivi est toujours au top. Les retraits sont ultra-rapides, cependant des bonus diversifies seraient un atout. En conclusion, Stake Casino assure un divertissement non-stop. A souligner le site est rapide et engageant, donne envie de prolonger l’aventure. Un atout les competitions regulieres pour plus de fun, offre des bonus constants.
Cliquez ici|
DailyInspireVision – Motivational insights highlighted, keeps focus sharp and determination steady.
J’adore l’ambiance electrisante de Mystake Casino, ca transporte dans un monde d’excitation. Le choix est aussi large qu’un festival, avec des machines a sous visuellement superbes. Le bonus d’inscription est attrayant. Le support client est irreprochable. Les paiements sont securises et instantanes, par ailleurs des bonus diversifies seraient un atout. Au final, Mystake Casino est une plateforme qui fait vibrer. Pour ajouter le site est rapide et engageant, amplifie le plaisir de jouer. Un avantage les options variees pour les paris sportifs, qui motive les joueurs.
Ouvrir le site|
Je suis enthousiaste a propos de Mystake Casino, il offre une experience dynamique. Les options de jeu sont incroyablement variees, avec des machines a sous aux themes varies. Il donne un avantage immediat. Disponible 24/7 pour toute question. Les retraits sont lisses comme jamais, a l’occasion quelques free spins en plus seraient bienvenus. Pour finir, Mystake Casino offre une aventure inoubliable. Notons egalement la navigation est fluide et facile, facilite une experience immersive. Un point cle les paiements securises en crypto, renforce la communaute.
http://www.casinomystakefr.com|
nsfw content NSFW (Not Safe For Work) контент, созданный с использованием ИИ, представляет собой серьезную проблему, требующую комплексного подхода. С одной стороны, ИИ может быть использован для создания развлекательного контента, удовлетворяющего определенные предпочтения аудитории. С другой стороны, существует значительный риск использования ИИ для создания дипфейков, порнографии с участием несовершеннолетних или другого контента, нарушающего законы и права человека. Особенно остро стоит вопрос о создании и распространении контента, в котором лица изображены без их согласия. Крайне важно разработать эффективные механизмы контроля и регулирования, которые позволят предотвратить злоупотребления ИИ в этой сфере и защитить права и интересы всех заинтересованных сторон. Эти механизмы должны включать в себя технологии для обнаружения и удаления такого контента, а также правовые нормы, предусматривающие ответственность за его создание и распространение. Необходимо также проводить образовательную работу, направленную на повышение осведомленности о рисках и последствиях распространения нелегального NSFW контента, созданного с применением искусственного интеллекта.
узнать больше https://kra46a.at/
double happiness cigarette australia
Australia Tobacco Service emerged as a reliable online tobacco retailer in the nation. Founded in 2024, the platform quickly earned customer trust through affordable pricing and fast shipping. The company prioritises customer convenience with: No-cost delivery across the country, no base amount; Same-day dispatch for orders before 5:00 AM (AET); Discreet packaging with no signs of contents; Versatile payments: bank transfer.
Why Choose Australian Cigarette Delivery? A licensed store committed to authentic products at fair prices. All items follow Australian regulations. Sales for adults 18+ only. The featured labels include a broad selection: the brand — worldwide admired for smooth taste (includes Gold); the brand — delicate to cool-flavoured blends; Benson & Hedges — luxury with elegant taste; Dunhill — UK-origin with cultured experience; the brand — traditional Asian brand with rich fragrance.
Frequently Asked Questions: Shipping times? Orders before 5:00 AM (GMT+11) sent same day. Delivery takes 2–5 business days. Ship internationally? Delivery available only within the nation. Track orders? Tracking number provided via email after shipment. Payment methods? Accept Wise. All transactions handled securely. Return policy? Returns for defects only. Sealed items not returned for different decision. Cancel orders? Cancelled only before execution. Reach support? Available seven days. Questions via email, responses within hours.
Summary: Australia Tobacco Service excells through authenticity and affordability. With day-of processing, no-cost shipping and discreet packaging, it offers a reliable solution for adult smokers. Sales strictly for 18+ persons.
на этом сайте https://kra46a.at
What made you first develop an interest in this topic?
J’ai un veritable coup de c?ur pour Casinozer Casino, ca donne une vibe electrisante. Le choix est aussi large qu’un festival, avec des slots aux graphismes modernes. Il offre un coup de pouce allechant. Le service est disponible 24/7. Les retraits sont lisses comme jamais, de temps en temps plus de promotions frequentes boosteraient l’experience. En conclusion, Casinozer Casino vaut une exploration vibrante. Pour couronner le tout le site est rapide et immersif, ce qui rend chaque session plus palpitante. Un bonus les tournois reguliers pour la competition, qui dynamise l’engagement.
Regarder de plus prГЁs|
узнать https://kra46a.at/
Hey very cool site!! Man .. Beautiful .. Amazing .. I will bookmark your website and take the feeds also…I’m happy to find so many useful information here in the post, we need develop more strategies in this regard, thanks for sharing. . . . . .
J’adore la vibe de Mystake Casino, ca offre un plaisir vibrant. La variete des jeux est epoustouflante, avec des machines a sous aux themes varies. 100% jusqu’a 500 € plus des tours gratuits. Le suivi est d’une fiabilite exemplaire. Les paiements sont securises et rapides, mais encore des bonus diversifies seraient un atout. En bref, Mystake Casino est un endroit qui electrise. A mentionner la navigation est fluide et facile, apporte une energie supplementaire. Un avantage les nombreuses options de paris sportifs, garantit des paiements securises.
AccГ©der maintenant|
страница https://kra46a.at
смотреть здесь https://kra46a.at
Подробнее здесь https://kra46a.at
ссылка на сайт https://kra46a.at
Перейти на сайт https://kra46a.at/
узнать больше Здесь https://kra46a.at/
перейти на сайт https://kra46a.at
J’ai un faible pour Casinozer Casino, ca pulse comme une soiree animee. Le catalogue est un tresor de divertissements, proposant des jeux de table sophistiques. 100% jusqu’a 500 € plus des tours gratuits. Les agents sont rapides et pros. Le processus est simple et transparent, de temps a autre quelques free spins en plus seraient bienvenus. Dans l’ensemble, Casinozer Casino est un immanquable pour les amateurs. A mentionner la navigation est simple et intuitive, incite a rester plus longtemps. A mettre en avant les evenements communautaires dynamiques, assure des transactions fiables.
En savoir davantage|
сайт https://kra46a.at
читать https://kra46a.at/
Платформа 1xbet удобная и быстрая, ставки ставить легко. Казино работает без лагов. Вывод средств стабильно приходит вовремя: 1хбет казино
нажмите здесь https://kra46a.at/
GlamourFinds – Very sleek selection of products, exploring the shop was seamless.
кликните сюда https://kra46a.at/
взгляните на сайте здесь https://kra46a.at/
страница https://kra46a.at
Источник https://kra46a.at
Рабочее зеркало 1win всегда загружается, даже при плохом интернете. Ставки проходят быстро. Вывод средств завершён без проблем: 1win сайт
inspireyourjourney.shop – Love how this site motivates you to keep moving forward daily.
Growth & Clarity Hub – Insights for cultivating focus, productivity, and purposeful development.
веб-сайте https://kra46a.at
можно проверить ЗДЕСЬ https://kra46a.at/
findyourstrength.shop – Helpful content that inspires confidence and encourages stronger habits every day.
посмотреть в этом разделе https://kra46a.at/
Следующая страница https://kra46a.at/
посетить веб-сайт https://kra46a.at/
перенаправляется сюда https://kra46a.at/
посмотреть в этом разделе https://kra46a.at
Je suis sous le charme de Coolzino Casino, ca offre une experience immersive. La selection est riche et diversifiee, offrant des sessions live palpitantes. Il offre un coup de pouce allechant. Disponible 24/7 pour toute question. Les gains sont transferes rapidement, occasionnellement des bonus varies rendraient le tout plus fun. En conclusion, Coolzino Casino merite un detour palpitant. A mentionner la navigation est intuitive et lisse, incite a rester plus longtemps. A noter le programme VIP avec des niveaux exclusifs, offre des bonus constants.
Commencer Г naviguer|
нажмите, чтобы подробнее https://kra46a.at
FashionTrailHub – Stylish picks showcased, navigating categories felt effortless today.
Je suis enthousiaste a propos de Coolzino Casino, on ressent une ambiance de fete. La bibliotheque est pleine de surprises, avec des machines a sous visuellement superbes. Il offre un demarrage en fanfare. Les agents repondent avec efficacite. Le processus est transparent et rapide, quelquefois des recompenses supplementaires dynamiseraient le tout. En conclusion, Coolzino Casino est un lieu de fun absolu. Pour ajouter l’interface est simple et engageante, amplifie l’adrenaline du jeu. Un plus les evenements communautaires dynamiques, propose des avantages uniques.
Commencer Г lire|
Je suis enthousiasme par MonteCryptos Casino, il procure une sensation de frisson. La selection est riche et diversifiee, avec des machines a sous aux themes varies. Avec des transactions rapides. Les agents sont rapides et pros. Les paiements sont securises et rapides, mais des offres plus genereuses seraient top. Dans l’ensemble, MonteCryptos Casino garantit un amusement continu. En extra la navigation est claire et rapide, permet une plongee totale dans le jeu. Particulierement attrayant les transactions crypto ultra-securisees, propose des privileges sur mesure.
Entrer|
J’adore la vibe de Lucky8 Casino, il propose une aventure palpitante. Le catalogue est un tresor de divertissements, offrant des sessions live palpitantes. Il offre un coup de pouce allechant. Le service client est de qualite. Le processus est transparent et rapide, neanmoins des recompenses additionnelles seraient ideales. En conclusion, Lucky8 Casino est une plateforme qui pulse. Pour ajouter l’interface est fluide comme une soiree, ce qui rend chaque session plus palpitante. Un point cle le programme VIP avec des recompenses exclusives, garantit des paiements securises.
Ouvrir le site|
J’ai une passion debordante pour Lucky8 Casino, ca offre un plaisir vibrant. On trouve une gamme de jeux eblouissante, avec des slots aux graphismes modernes. Il offre un coup de pouce allechant. Le service d’assistance est au point. Les gains sont verses sans attendre, par ailleurs des offres plus genereuses rendraient l’experience meilleure. En bref, Lucky8 Casino vaut une exploration vibrante. Notons egalement le site est rapide et engageant, facilite une immersion totale. Egalement super les competitions regulieres pour plus de fun, propose des avantages uniques.
Poursuivre la lecture|
Je suis completement seduit par NetBet Casino, ca transporte dans un univers de plaisirs. Le catalogue est un paradis pour les joueurs, avec des slots aux designs captivants. Il donne un elan excitant. Les agents repondent avec rapidite. Les paiements sont securises et rapides, par ailleurs quelques tours gratuits en plus seraient geniaux. Dans l’ensemble, NetBet Casino garantit un amusement continu. Notons egalement la navigation est intuitive et lisse, permet une immersion complete. Un point cle les evenements communautaires pleins d’energie, offre des recompenses regulieres.
DГ©couvrir la page|
ChicStyleOutlet – Fashionable finds featured, browsing through new styles was quick and fun.
I encountered your site after doing a search for new contesting using Google, and decided to stick around and read more of your articles. Thanks for posting, I have your site bookmarked now.
thoughtful gift shop – Unique finds made shopping easy and pleasantly enjoyable.
J’adore le dynamisme de Coolzino Casino, ca offre un plaisir vibrant. La bibliotheque de jeux est captivante, proposant des jeux de casino traditionnels. Il rend le debut de l’aventure palpitant. Le suivi est toujours au top. Les paiements sont securises et instantanes, de temps en temps des recompenses supplementaires seraient parfaites. Pour faire court, Coolzino Casino est un lieu de fun absolu. A mentionner le design est tendance et accrocheur, amplifie le plaisir de jouer. Un avantage notable les tournois reguliers pour s’amuser, qui motive les joueurs.
DГ©couvrir la page|
J’adore l’energie de Coolzino Casino, c’est une plateforme qui deborde de dynamisme. Les options sont aussi vastes qu’un horizon, comprenant des jeux compatibles avec les cryptos. 100% jusqu’a 500 € plus des tours gratuits. Les agents sont rapides et pros. Les gains arrivent sans delai, par contre des recompenses supplementaires dynamiseraient le tout. En conclusion, Coolzino Casino vaut une visite excitante. Pour ajouter la plateforme est visuellement captivante, ce qui rend chaque partie plus fun. Egalement genial les nombreuses options de paris sportifs, qui stimule l’engagement.
Avancer|
unique presents portal – Lovely collection of gifts, discovering products was quick and easy.
Je suis captive par MonteCryptos Casino, il cree un monde de sensations fortes. Il y a une abondance de jeux excitants, comprenant des jeux crypto-friendly. Il donne un elan excitant. Le service client est de qualite. Les retraits sont ultra-rapides, neanmoins des recompenses supplementaires seraient parfaites. Pour finir, MonteCryptos Casino merite un detour palpitant. De plus le site est rapide et immersif, booste l’excitation du jeu. Un bonus le programme VIP avec des privileges speciaux, qui dynamise l’engagement.
Continuer ici|
Je suis totalement conquis par Lucky8 Casino, ca donne une vibe electrisante. On trouve une gamme de jeux eblouissante, proposant des jeux de cartes elegants. Avec des depots rapides et faciles. Le support est efficace et amical. Les paiements sont securises et rapides, cependant des recompenses en plus seraient un bonus. En resume, Lucky8 Casino est un immanquable pour les amateurs. Par ailleurs la navigation est fluide et facile, booste le fun du jeu. Egalement genial les transactions en crypto fiables, offre des recompenses continues.
Aller sur le web|
J’adore la vibe de Lucky8 Casino, ca invite a plonger dans le fun. Les options de jeu sont infinies, avec des slots aux graphismes modernes. Avec des transactions rapides. Les agents sont toujours la pour aider. Le processus est clair et efficace, malgre tout des recompenses supplementaires dynamiseraient le tout. Pour conclure, Lucky8 Casino offre une experience inoubliable. Pour completer la navigation est simple et intuitive, apporte une energie supplementaire. Particulierement attrayant les competitions regulieres pour plus de fun, offre des recompenses continues.
http://www.casinolucky8fr.com|
J’adore l’ambiance electrisante de MonteCryptos Casino, il cree une experience captivante. Les options de jeu sont infinies, offrant des experiences de casino en direct. Il amplifie le plaisir des l’entree. Disponible 24/7 pour toute question. Les paiements sont securises et instantanes, de temps en temps des recompenses supplementaires dynamiseraient le tout. En resume, MonteCryptos Casino vaut une exploration vibrante. A signaler l’interface est simple et engageante, facilite une experience immersive. A souligner les tournois frequents pour l’adrenaline, propose des avantages sur mesure.
Commencer Г naviguer|
Je suis captive par NetBet Casino, il offre une experience dynamique. Le catalogue de titres est vaste, avec des machines a sous visuellement superbes. Le bonus de bienvenue est genereux. Le service client est excellent. Les transactions sont d’une fiabilite absolue, par moments des offres plus genereuses rendraient l’experience meilleure. Globalement, NetBet Casino offre une aventure inoubliable. Notons aussi le design est moderne et attrayant, amplifie le plaisir de jouer. Un element fort les options de paris sportifs diversifiees, qui dynamise l’engagement.
Jeter un coup d’œil|
Je suis totalement conquis par NetBet Casino, on ressent une ambiance de fete. Les options de jeu sont incroyablement variees, offrant des sessions live palpitantes. Le bonus initial est super. Disponible 24/7 par chat ou email. Les transactions sont toujours securisees, parfois des offres plus consequentes seraient parfaites. En resume, NetBet Casino merite une visite dynamique. En bonus l’interface est simple et engageante, facilite une experience immersive. Particulierement attrayant les nombreuses options de paris sportifs, garantit des paiements securises.
Voir la page d’accueil|
findpurposeandpeace.click – Thoughtful content encourages finding purpose while staying grounded and focused today.
happyshoppingcorner.click – Products look amazing, browsing categories here is easy and very convenient.
этот контент https://kra46a.at
change maker hub – Provides guidance to implement positive actions and create results.
ссылка на сайт https://kra46a.at/
Смотреть здесь https://kra46a.at
продолжить https://kra46a.at/
modern fashion hub – Stylish collections available, discovering new looks was easy today.
Продолжение https://kra46a.at
опубликовано здесь https://kra46a.at
J’adore le dynamisme de Coolzino Casino, ca invite a plonger dans le fun. Il y a une abondance de jeux excitants, comprenant des titres adaptes aux cryptomonnaies. Le bonus initial est super. Disponible a toute heure via chat ou email. Les paiements sont surs et efficaces, par contre des recompenses supplementaires dynamiseraient le tout. En resume, Coolzino Casino merite un detour palpitant. En complement le site est rapide et style, amplifie le plaisir de jouer. A signaler les evenements communautaires dynamiques, propose des avantages uniques.
Aller à l’intérieur|
kadıköy boşanma avukatı
нажмите https://kra46a.at
На платформе 1win удобно играть с телефона. Интерфейс адаптирован идеально. Вывод средств был без задержек: 1 вин
ко ланта ко ланта
future growth portal – Offers tips and strategies to shape a better tomorrow today.
купить электрические рулонные шторы https://www.rulonnye-shtory-s-elektroprivodom177.ru .
Je suis captive par Coolzino Casino, ca invite a plonger dans le fun. Les jeux proposes sont d’une diversite folle, offrant des experiences de casino en direct. 100% jusqu’a 500 € + tours gratuits. Le suivi est d’une fiabilite exemplaire. Le processus est simple et transparent, de temps en temps plus de promos regulieres dynamiseraient le jeu. Pour finir, Coolzino Casino est un immanquable pour les amateurs. A noter la navigation est simple et intuitive, ajoute une touche de dynamisme. Un plus les evenements communautaires pleins d’energie, assure des transactions fluides.
Lire les dГ©tails|
Je suis totalement conquis par Coolzino Casino, il propose une aventure palpitante. La selection est riche et diversifiee, proposant des jeux de table sophistiques. Le bonus de bienvenue est genereux. Le support est efficace et amical. Les transactions sont fiables et efficaces, par ailleurs des offres plus consequentes seraient parfaites. En conclusion, Coolzino Casino garantit un plaisir constant. D’ailleurs le site est fluide et attractif, apporte une energie supplementaire. Particulierement fun les paiements securises en crypto, assure des transactions fiables.
Visiter le site|
подробнее здесь https://kra46a.at/
J’adore la vibe de MonteCryptos Casino, ca offre un plaisir vibrant. Il y a une abondance de jeux excitants, avec des machines a sous visuellement superbes. Le bonus de depart est top. Les agents sont rapides et pros. Les paiements sont surs et efficaces, neanmoins des recompenses supplementaires seraient parfaites. En resume, MonteCryptos Casino offre une aventure inoubliable. Notons egalement le design est moderne et energique, amplifie le plaisir de jouer. Un element fort les transactions en crypto fiables, cree une communaute vibrante.
Voir maintenant|
J’adore l’ambiance electrisante de MonteCryptos Casino, il cree un monde de sensations fortes. Les options de jeu sont incroyablement variees, incluant des paris sportifs pleins de vie. Il amplifie le plaisir des l’entree. Les agents repondent avec efficacite. Les transactions sont d’une fiabilite absolue, par moments des bonus varies rendraient le tout plus fun. Dans l’ensemble, MonteCryptos Casino merite un detour palpitant. En complement la plateforme est visuellement vibrante, incite a rester plus longtemps. Egalement super les transactions crypto ultra-securisees, garantit des paiements rapides.
Obtenir plus|
takeactiontoday.shop – Motivational content pushes you to stay focused and achieve your targets.
Je suis bluffe par Lucky8 Casino, il cree une experience captivante. Les jeux proposes sont d’une diversite folle, comprenant des jeux compatibles avec les cryptos. Il offre un demarrage en fanfare. Disponible 24/7 par chat ou email. Le processus est fluide et intuitif, rarement plus de promos regulieres dynamiseraient le jeu. Pour conclure, Lucky8 Casino vaut une visite excitante. De surcroit le design est style et moderne, permet une plongee totale dans le jeu. A noter les evenements communautaires pleins d’energie, propose des avantages sur mesure.
Emmenez-moi lГ -bas|
Je suis enthousiasme par Lucky8 Casino, il propose une aventure palpitante. Le choix est aussi large qu’un festival, comprenant des jeux compatibles avec les cryptos. Le bonus de depart est top. Les agents repondent avec rapidite. Les retraits sont ultra-rapides, a l’occasion des recompenses en plus seraient un bonus. Globalement, Lucky8 Casino est un must pour les passionnes. De plus l’interface est simple et engageante, booste le fun du jeu. Un element fort les evenements communautaires dynamiques, offre des bonus constants.
Explorer plus|
Je suis epate par NetBet Casino, ca invite a plonger dans le fun. La selection de jeux est impressionnante, offrant des sessions live immersives. Il offre un coup de pouce allechant. Le support client est irreprochable. Les transactions sont fiables et efficaces, par contre plus de promos regulieres dynamiseraient le jeu. Pour faire court, NetBet Casino est un incontournable pour les joueurs. En complement l’interface est lisse et agreable, permet une immersion complete. Egalement genial les paiements en crypto rapides et surs, propose des privileges personnalises.
Aller voir|
Подробнее https://kra46a.at
Style & Trend Spot – Find fashionable outfits and accessories to refresh your style.
этот сайт https://kra46a.at
Je suis enthousiasme par NetBet Casino, ca pulse comme une soiree animee. Il y a une abondance de jeux excitants, proposant des jeux de table classiques. Le bonus de bienvenue est genereux. Les agents sont rapides et pros. Les retraits sont simples et rapides, cependant quelques free spins en plus seraient bienvenus. En conclusion, NetBet Casino garantit un amusement continu. Notons egalement le design est style et moderne, apporte une energie supplementaire. A souligner les tournois reguliers pour s’amuser, propose des privileges personnalises.
Trouver les dГ©tails|
перейдите на этот сайт https://kra46a.at/
интернет https://kra46a.at/
перейти на сайт https://kra46a.at/
страница https://kra46a.at/
J’ai un veritable coup de c?ur pour Coolzino Casino, il cree une experience captivante. La selection est riche et diversifiee, proposant des jeux de casino traditionnels. Avec des depots fluides. Les agents sont toujours la pour aider. Les transactions sont toujours securisees, mais encore plus de promos regulieres ajouteraient du peps. En resume, Coolzino Casino est un choix parfait pour les joueurs. En bonus la navigation est fluide et facile, incite a rester plus longtemps. Egalement excellent le programme VIP avec des niveaux exclusifs, garantit des paiements securises.
VГ©rifier le site|
Следующая страница https://kra46a.at
Смотреть здесь https://kra46a.at/
Следующая страница https://kra46a.at
подробнее здесь https://kra46a.at
этот сайт https://kra46a.at/
интернет https://kra46a.at
simpledealhub.shop – Product selection feels organized, browsing is easy and hassle-free.
узнать больше Здесь https://kra46a.at/
узнать https://kra42-cc.at/
узнать больше https://kra46a.at/
smartbuyzone.click – Great deals available, browsing products here was simple and enjoyable today.
сайт https://kra43-cc.at
сюда https://kra42-cc.at
узнать https://kra46a.at
modernfashionworld.click – Fashion picks look great, site layout feels smooth and user-friendly today.
другие https://kra43-cc.at/
проверить сайт https://kra46a.at
проверить сайт https://kra46a.at/
tripscan трипскан
каталог https://kra46a.at/
веб-сайт https://kra46a.at
здесь https://kra46a.at
Подробнее https://kra42-cc.at
в этом разделе https://kra46a.at/
опубликовано здесь https://kra43-cc.at/
пояснения https://kra46a.at
unique presents hub – Lovely variety of gifts, site layout made browsing smooth and easy.
ко ланте Ко Ланте
подробнее https://kra46a.at
Подробнее https://kra42-cc.at/
трипскан TripScan предлагает удобный интерфейс, где вы можете ввести свои предпочтения, даты поездки и желаемый бюджет, а умные алгоритмы подберут оптимальные варианты. Благодаря Tripscan, планирование отпуска превращается из утомительной задачи в увлекательное занятие.
Заказывал через DRINKIO несколько раз и всегда оставался доволен сервисом. Доставка приезжает быстро, даже ночью, когда другие магазины уже не работают. Удобно, что всё можно оформить онлайн без звонков и ожидания. Большой выбор напитков, цены вполне адекватные для круглосуточной службы. Отличный сервис для тех, кто ценит комфорт и оперативность: https://drinkio70.ru/
J’adore la vibe de Coolzino Casino, on ressent une ambiance de fete. Les options sont aussi vastes qu’un horizon, comprenant des jeux optimises pour Bitcoin. Avec des depots fluides. Les agents repondent avec rapidite. Les retraits sont ultra-rapides, rarement plus de promos regulieres dynamiseraient le jeu. Pour finir, Coolzino Casino offre une experience hors du commun. De surcroit l’interface est fluide comme une soiree, incite a prolonger le plaisir. Un avantage notable les nombreuses options de paris sportifs, garantit des paiements securises.
Explorer davantage|
J’adore le dynamisme de Coolzino Casino, ca offre une experience immersive. Les jeux proposes sont d’une diversite folle, offrant des tables live interactives. Il amplifie le plaisir des l’entree. Disponible 24/7 pour toute question. Les retraits sont ultra-rapides, neanmoins des offres plus genereuses rendraient l’experience meilleure. En fin de compte, Coolzino Casino est un endroit qui electrise. A mentionner le site est rapide et style, ce qui rend chaque session plus excitante. Particulierement fun les evenements communautaires vibrants, propose des avantages uniques.
Trouver les dГ©tails|
содержание https://kra46a.at/
Смотреть здесь https://kra43-cc.at
J’adore la vibe de Lucky8 Casino, il cree une experience captivante. Les options de jeu sont infinies, avec des slots aux graphismes modernes. Le bonus initial est super. Le service d’assistance est au point. Le processus est clair et efficace, par moments plus de promos regulieres dynamiseraient le jeu. En conclusion, Lucky8 Casino est une plateforme qui fait vibrer. En plus l’interface est lisse et agreable, donne envie de continuer l’aventure. A signaler les competitions regulieres pour plus de fun, assure des transactions fiables.
Consulter les dГ©tails|
J’ai une passion debordante pour Lucky8 Casino, ca transporte dans un monde d’excitation. Les options de jeu sont infinies, offrant des sessions live immersives. Avec des depots fluides. Le support est pro et accueillant. Le processus est transparent et rapide, bien que des offres plus genereuses seraient top. Pour conclure, Lucky8 Casino vaut une visite excitante. A souligner l’interface est fluide comme une soiree, incite a rester plus longtemps. Un point cle les options variees pour les paris sportifs, propose des avantages uniques.
Commencer Г naviguer|
J’ai une passion debordante pour Lucky8 Casino, on ressent une ambiance de fete. La selection est riche et diversifiee, avec des slots aux designs captivants. Il rend le debut de l’aventure palpitant. Le service client est de qualite. Le processus est transparent et rapide, cependant des recompenses en plus seraient un bonus. Pour faire court, Lucky8 Casino vaut une exploration vibrante. De plus l’interface est intuitive et fluide, ce qui rend chaque session plus excitante. Un point fort les options de paris sportifs variees, propose des avantages sur mesure.
DГ©couvrir plus|
Je suis captive par NetBet Casino, ca transporte dans un monde d’excitation. La selection de jeux est impressionnante, offrant des sessions live palpitantes. Le bonus de depart est top. Les agents sont toujours la pour aider. Les gains arrivent sans delai, neanmoins quelques free spins en plus seraient bienvenus. Pour finir, NetBet Casino est un immanquable pour les amateurs. A souligner la plateforme est visuellement electrisante, booste le fun du jeu. Un point fort les transactions crypto ultra-securisees, offre des bonus constants.
DГ©couvrir le contenu|
educationunlimited.click – Daily lessons motivate growth and help discover new knowledge easily.
Je suis enthousiasme par NetBet Casino, on y trouve une energie contagieuse. Le choix de jeux est tout simplement enorme, incluant des paris sportifs en direct. Avec des depots rapides et faciles. Le support est fiable et reactif. Les gains arrivent sans delai, mais encore des recompenses supplementaires dynamiseraient le tout. Globalement, NetBet Casino vaut une visite excitante. Notons aussi l’interface est fluide comme une soiree, facilite une immersion totale. Particulierement interessant les tournois reguliers pour la competition, qui stimule l’engagement.
Essayer maintenant|
Источник https://kra43-cc.at
ко ланта ко ланта
опубликовано здесь https://kra43-cc.at
горизонтальные жалюзи с электроприводом горизонтальные жалюзи с электроприводом .
управление шторами с телефона управление шторами с телефона .
содержание https://kra42-cc.at
freshcornerstore.click – Great modern items displayed well, exploring options was easy and fast.
другие https://kra42-cc.at/
трипскан Забудьте о долгих часах, проведенных в поисках идеального варианта, Tripscan сделает всю работу за вас, предлагая лучшие предложения, соответствующие вашим потребностям. TripScan – ваш верный спутник в мире путешествий, готовый сделать вашу следующую поездку незабываемой.
дизайн интерьера спб недорого https://dizayna-interera-spb.ru
пояснения https://kra42-cc.at/
creative gift shop – Lovely variety of items, browsing through options felt easy and enjoyable.
Daily Motivation Hub – A go-to spot for motivation and personal growth.
ко ланте Ко Ланте
fashionglobe.click – Stylish picks from various countries, exploring options was quick and smooth.
дизайн интерьера спб недорого https://dizayna-interera-spb.ru
freshchoiceshop.click – Trendy items featured nicely, shopping experience felt smooth and quick.
australia cheap tobacco
Australian Cigarette Delivery emerged as a trusted online tobacco retailer in the nation. Founded in 2024, the platform quickly gained customer confidence through competitive pricing and fast shipping. The company focuses on customer ease with: Free delivery across Australia, no base amount; Same-day dispatch for orders before 5:00 AM (GMT+11); Discreet packaging with no markings of contents; Versatile payments: PayPal.
Why Choose Australia Cig Delivery? A authorised store committed to authentic products at fair prices. All items follow Australian regulations. Sales for adults 18+ only. The available brands include a broad range: the brand — globally respected for refined taste (includes Red); Manchester — light to menthol mixes; the brand — luxury with elegant taste; Dunhill — UK-origin with cultured experience; Double Happiness — classic oriental brand with rich aroma.
Common Questions: Delivery times? Orders before 5:00 AM (GMT+11) sent same day. Shipping takes 2–5 business days. Ship internationally? Delivery available only within Australia. Track orders? Tracking number provided via email after shipment. Payment methods? Receive PayPal. All transactions handled safely. Return policy? Refunds for defects only. Unopened items not returned for change of mind. Cancel orders? Annulled only before processing. Reach service? Accessible seven days. Questions via email, responses within hours.
Conclusion: Australia Tobacco Service excells through authenticity and affordability. With same-day dispatch, free shipping and private packaging, it offers a trustworthy solution for adult smokers. Sales strictly for 18+ persons.
ссылка на сайт https://kra42-cc.at
brightstyleoutlet.click – Bright and cheerful fashion choices, exploring collections felt quick and enjoyable.
exploreopportunities.click – Inspiring content motivates visitors to take action and seize opportunities consistently.
ко ланте Ко Ланте
bright choices online – Offers a well-organized selection of items for an effortless experience.
freshchoicehub.click – Attractive selection of fresh products, shopping felt effortless and quick.
successmakerhub.click – Helpful guidance motivates turning ideas into real accomplishments efficiently.
кликните сюда кракен
проверить сайт kra43 cc
веб-сайт kra44 at
freshchoiceshop.click – Trendy items featured nicely, shopping experience felt smooth and quick.
best picks online – Wide selection featured, navigating products was simple and seamless today.
I enjoy your blog posts, saved to my bookmarks!
Нужно было срочно улететь отдохнуть, и я нашёл подходящий горящий тур в этом агентстве. Сотрудники быстро всё проверили, помогли выбрать правильный рейс и объяснили детали трансфера. Оформление заняло минимум времени. На курорте никаких проблем не возникло, всё соответствовало ожиданиям. Очень благодарен за оперативность и профессионализм: горящие туры на мальдивы из москвы
I do not even know how I ended up here, but I thought this post was good. I do not know who you are but certainly you are going to a famous blogger if you are not already 😉 Cheers!
tripscan Используя Tripscan, вы можете планировать не только отпуск, но и деловые поездки, находя оптимальные варианты проживания и перелетов. Платформа предлагает различные варианты оплаты и поддерживает множество валют, делая процесс бронирования максимально удобным.
нажмите здесь kra42 cc
trendmarketplace.click – Trendy items featured nicely, easy to browse and compare products.
whoah this weblog is fantastic i really like reading your articles.
Keep up the good work! You recognize, many persons are looking round for this info, you could help
them greatly.
freshstylehub.click – Fashionable items presented nicely, browsing the collection was enjoyable.
vision clarity shop – Inspires actionable steps to turn ideas into a concrete vision every day.
ко ланта ко ланта
freshchoicecorner.click – Excellent selection of fresh picks, browsing was easy and enjoyable today.
этот сайт kra45 cc
freshlookhub.click – Trendy apparel displayed clearly, exploring the latest styles was simple.
посмотреть на этом сайте kra39 cc
промокод вавада — это актуальное зеркало для доступа к популярному онлайн-казино.
Она предлагает широкий выбор слотов, рулетки и карточных игр.
Сайт отличается удобным интерфейсом и быстрой работой. vavadacasinos.neocities.org доступен круглосуточно с любых устройств.
#### Раздел 2: Игровой ассортимент
На платформе представлены сотни игр от мировых провайдеров. Каждый игрок найдет вариант по вкусу — от блекджека до современных видео-слотов.
Особого внимания заслуживают джекпоты и турниры. Крупные выигрыши разыгрываются в прогрессивных слотах.
#### Раздел 3: Бонусы и акции
Новые игроки получают щедрые приветственные подарки. Вращения в слотах дарятся без обязательных вложений.
Система лояльности поощряет постоянных клиентов. Чем чаще вы играете, тем выше становятся бонусы.
#### Раздел 4: Безопасность и поддержка
Vavada гарантирует честность и прозрачность игр. Все автоматы проходят проверку на случайность генерации чисел.
Служба поддержки работает в режиме 24/7. Консультанты отвечают моментально в онлайн-чате.
### Спин-шаблон
#### Раздел 1: Введение в мир Vavada
1. Vavada — известный ресурс для любителей азартных развлечений.
2. Здесь представлены лучшие игровые автоматы от ведущих разработчиков.
3. Сайт отличается удобным интерфейсом и быстрой работой.
4. Регистрация занимает всего несколько минут, а поддержка помогает в любое время.
#### Раздел 2: Игровой ассортимент
1. В каталоге можно найти сотни развлечений на любой вкус.
2. Здесь есть классические слоты, настольные игры и live-дилеры.
3. Крупные розыгрыши привлекают внимание тысяч участников.
4. Крупные выигрыши разыгрываются в прогрессивных слотах.
#### Раздел 3: Бонусы и акции
1. Регистрация открывает доступ к выгодным бонусам.
2. Бонусы начисляются как за регистрацию, так и за активность.
3. Система лояльности поощряет постоянных клиентов.
4. Кешбэк и эксклюзивные предложения доступны для VIP-игроков.
#### Раздел 4: Безопасность и поддержка
1. Игровой процесс строго контролируется независимыми аудиторами.
2. Вывод средств происходит быстро и без скрытых комиссий.
3. Служба поддержки работает в режиме 24/7.
4. Консультанты отвечают моментально в онлайн-чате.
yourpotentialgrows.click – Helpful guidance here, perfect for nurturing personal potential and consistent growth today.
нажмите здесь m bs2web at
freshfavoriteshub.click – Nice collection of fresh products, exploring items felt easy today.
Узнайте больше про редкие синдромы и возможности их диагностики.
Узнайте больше про редкие синдромы и возможности их диагностики.
https://contractna-svo.ru/
как получить гражданство рф белорусу
подробнее здесь kra39 at
остров ко ланта остров ко ланта
посетить веб-сайт kra37 at
сюда blsp at
cozyhomeclick.click – Lovely home essentials make shopping easy and enjoyable today.
взгляните на сайте здесь кракен
bright choice outlet – Easy-to-navigate selection of products that makes browsing fun today.
казіно вавада — это актуальное зеркало для доступа к популярному онлайн-казино.
Пользователи могут насладиться десятками лицензионных игр с высокими выплатами.
Сайт отличается удобным интерфейсом и быстрой работой. Регистрация занимает всего несколько минут, а поддержка помогает в любое время.
#### Раздел 2: Игровой ассортимент
На платформе представлены сотни игр от мировых провайдеров. Здесь есть классические слоты, настольные игры и live-дилеры.
Особого внимания заслуживают джекпоты и турниры. Ежедневные розыгрыши привлекают тысячи участников.
#### Раздел 3: Бонусы и акции
Новые игроки получают щедрые приветственные подарки. Первый депозит может быть увеличен на 100% или более.
Система лояльности поощряет постоянных клиентов. Чем чаще вы играете, тем выше становятся бонусы.
#### Раздел 4: Безопасность и поддержка
Vavada гарантирует честность и прозрачность игр. Все автоматы проходят проверку на случайность генерации чисел.
Служба поддержки работает в режиме 24/7. Решение любых вопросов занимает минимум времени.
### Спин-шаблон
#### Раздел 1: Введение в мир Vavada
1. Vavada Casinos — это популярная онлайн-платформа для азартных игр.
2. Пользователи могут насладиться десятками лицензионных игр с высокими выплатами.
3. Все игры загружаются моментально благодаря оптимизированному движку.
4. vavadacasinos.neocities.org доступен круглосуточно с любых устройств.
#### Раздел 2: Игровой ассортимент
1. Ассортимент включает в себя множество игр от топовых студий.
2. Популярные автоматы от NetEnt и Microgaming радуют отличной графикой.
3. Особого внимания заслуживают джекпоты и турниры.
4. Ежедневные розыгрыши привлекают тысячи участников.
#### Раздел 3: Бонусы и акции
1. Каждый новичок может рассчитывать на дополнительные фриспины.
2. Бонусы начисляются как за регистрацию, так и за активность.
3. Чем больше вы играете, тем выгоднее становятся условия.
4. Чем чаще вы играете, тем выше становятся бонусы.
#### Раздел 4: Безопасность и поддержка
1. Игровой процесс строго контролируется независимыми аудиторами.
2. Вывод средств происходит быстро и без скрытых комиссий.
3. Помощь доступна в любое время суток.
4. Консультанты отвечают моментально в онлайн-чате.
freshfashioncorner.click – Attractive items on display, navigating categories felt effortless today.
ко ланта ко ланта
tripscan Забудьте о долгих часах, проведенных в поисках идеального варианта, Tripscan сделает всю работу за вас, предлагая лучшие предложения, соответствующие вашим потребностям. TripScan – ваш верный спутник в мире путешествий, готовый сделать вашу следующую поездку незабываемой.
tüm sitelerin elimde tüm sitelerin elimde denimo videosu
This is really interesting, You’re a very skilled blogger. I have joined your feed and look forward to seeking more of your fantastic post. Also, I have shared your website in my social networks!
freshtrendshub.click – Trendy outlet with fresh picks, finding favorites felt simple today.
dreamandflourish.click – Positive content nurtures self-belief and consistent personal growth.
ко ланте Ко Ланте
cheerful trend finder – Great selection of styles, checking out products was fun and simple.
shopandshine.click – This site feels friendly, easy, and perfect for quick browsing anytime.
inspiregrowthdaily.click – Found useful tips here, helpful resource for staying focused on growth goals.
freshfashionfinds.click – Stylish items available, navigating new arrivals was simple and fun.
ко ланта ко ланта
grow your knowledge – Educational content designed to help users learn, reflect, and share ideas.
ко ланта ко ланта
freshtrendshub.click – Trendy outlet with fresh picks, finding favorites felt simple today.
Hooked on the material about Long-term cryptocurrency investment strategies.
Смотрите сами:
https://sproutwealthy.com
мел бет v-bux.ru .
fashionfindshub.click – Fresh styles highlighted clearly, navigating products was simple and fun.
freshideasdaily – Great for unlocking creativity and bringing new thoughts to life.
индивидуалки Анкеты эскортниц в Челнах — это возможность окунуться в мир роскоши и чувственности. Эти девушки знают, как доставить удовольствие и создать неповторимую атмосферу. Они следят за собой, обладают безупречными манерами и готовы поддержать любую тему разговора. Встречи в Челнах с эскортницами — это выбор тех, кто ценит качество, комфорт и незабываемые эмоции.
vavada казино зеркало на сегодня — это актуальное зеркало для доступа к популярному онлайн-казино.
Пользователи могут насладиться десятками лицензионных игр с высокими выплатами.
Сайт отличается удобным интерфейсом и быстрой работой. vavadacasinos.neocities.org доступен круглосуточно с любых устройств.
#### Раздел 2: Игровой ассортимент
На платформе представлены сотни игр от мировых провайдеров. Здесь есть классические слоты, настольные игры и live-дилеры.
Особого внимания заслуживают джекпоты и турниры. Крупные выигрыши разыгрываются в прогрессивных слотах.
#### Раздел 3: Бонусы и акции
Новые игроки получают щедрые приветственные подарки. Первый депозит может быть увеличен на 100% или более.
Система лояльности поощряет постоянных клиентов. Кешбэк и эксклюзивные предложения доступны для VIP-игроков.
#### Раздел 4: Безопасность и поддержка
Vavada гарантирует честность и прозрачность игр. Вывод средств происходит быстро и без скрытых комиссий.
Служба поддержки работает в режиме 24/7. Консультанты отвечают моментально в онлайн-чате.
### Спин-шаблон
#### Раздел 1: Введение в мир Vavada
1. Vavada — известный ресурс для любителей азартных развлечений.
2. Пользователи могут насладиться десятками лицензионных игр с высокими выплатами.
3. Сайт отличается удобным интерфейсом и быстрой работой.
4. Игроки могут зайти на платформу как с компьютера, так и со смартфона.
#### Раздел 2: Игровой ассортимент
1. На платформе представлены сотни игр от мировых провайдеров.
2. Здесь есть классические слоты, настольные игры и live-дилеры.
3. Прогрессивные джекпоты делают игру еще более интересной.
4. Специальные акции увеличивают шансы на победу.
#### Раздел 3: Бонусы и акции
1. Каждый новичок может рассчитывать на дополнительные фриспины.
2. Вращения в слотах дарятся без обязательных вложений.
3. VIP-игроки получают персональные предложения.
4. Кешбэк и эксклюзивные предложения доступны для VIP-игроков.
#### Раздел 4: Безопасность и поддержка
1. Игровой процесс строго контролируется независимыми аудиторами.
2. Лицензия обеспечивает защиту персональных данных.
3. Служба поддержки работает в режиме 24/7.
4. Игроки могут связаться с поддержкой через email или мессенджеры.
freshfashionfinds.click – Stylish items available, navigating new arrivals was simple and fun.
Just a quick note to express my appreciation. Take care
daily fresh picks – Wide selection available, shopping for new finds was simple and quick.
Читайте информативные статьи о здоровье, подготовленные опытными специалистами и прошедшие редакторскую проверку.
Top Savings Hub – Easy to scroll through and discover products that actually seemed useful.
купить диплом работу купить диплом работу .
freshcornerhub.click – Great outlet for discovering stylish items, navigating products was simple and fast.
creativechoicecorner.shop – Nicely curated collection, makes exploring creative products incredibly easy today.
узнать водкабет
fashion corner online – Elegant and modern items, site made searching quick and easy today.
встречи челны Вписки в Челнах – это для тех, кто ищет новых знакомств и спонтанных приключений. Это возможность окунуться в атмосферу беззаботности, познакомиться с единомышленниками и весело провести время. Главное – помнить о безопасности и выбирать проверенные места и компании. Вписка – это не просто вечеринка, это шанс почувствовать себя частью чего-то большего, найти новых друзей и получить заряд позитивных эмоций.
контрактники рф
https://служба-по-контракту-сво.рф/
Offer Deals Hub – Had no trouble exploring the site, and I came across some appealing discounts.
узнать больше vodkabet
freshstylehub.click – Fashionable items presented nicely, browsing the collection was enjoyable.
вписки челны Индивидуалки в Челнах – это гарантия конфиденциальности и индивидуального подхода. Они ценят ваше время и понимают ваши желания, стремясь создать атмосферу комфорта и доверия. Забудьте о формальностях и насладитесь обществом женщины, способной слушать, понимать и дарить незабываемые эмоции. Индивидуалки – это не просто спутницы на вечер, это ваши личные музы, готовые вдохновлять и удивлять. Они помогут вам расслабиться, забыть о проблемах и почувствовать себя уверенно и желанно.
продолжить водкабет
Appreciation for taking the time to discuss this topic, I would love to discover more on this topic. If viable, as you gain expertise, would you object to updating the website with further information? It is tremendously beneficial for me.
Market Trends Daily – Handpicked collections that make finding trendy items simple and fun.
trendcollectionhub.click – Fashion items easy to explore, navigation felt seamless and fast.
страница водка бет
freshchoiceshop.click – Trendy items featured nicely, shopping experience felt smooth and quick.
узнать больше Здесь водкабет
посмотреть в этом разделе водка бет
Favorite Trend Hub – Browsing was effortless, with trendy items displayed neatly throughout.
Экспертиза после залива была выполнена быстро и корректно https://advokat-zaliv.ru/
ко ланта ко ланта
на этом сайте vodkabet
I have been curious about these trends, and you have really helped me. I have just told a few of my friends about this on FaceBook and they love your content just as much as I do.
кевс кевс kews кевс к16 нб300 kews k16 nb300
freshpicksoutlet.click – Great collection of fashionable finds, shopping experience was smooth today.
fresh ideas portal – Helps uncover interesting ideas and inspiring opportunities daily.
Смотреть здесь зеркало водка бет
Оценщик показал высокий профессионализм и внимательность: https://sud-po-zalivu.ru/
Regards for helping out, superb info.
Very nice article, just what I was looking for.
Читать далее водка бет
веб-сайте водка бет
freshcornerhub.click – Great outlet for discovering stylish items, navigating products was simple and fast.
Great blog here! Additionally your website rather a lot up very fast! What host are you the usage of? Can I get your associate link for your host? I desire my website loaded up as fast as yours lol
Today’s Fresh Picks – Navigating the new items was smooth, and the daily selections looked excellent.
здесь vodkabet
смотреть здесь vodkabet
freshstylecorner.click – Fashionable items showcased nicely, shopping felt quick and effortless.
vavada казино зеркало на сегодня — это актуальное зеркало для доступа к популярному онлайн-казино.
Здесь представлены лучшие игровые автоматы от ведущих разработчиков.
Сайт отличается удобным интерфейсом и быстрой работой. vavadacasinos.neocities.org доступен круглосуточно с любых устройств.
#### Раздел 2: Игровой ассортимент
На платформе представлены сотни игр от мировых провайдеров. Здесь есть классические слоты, настольные игры и live-дилеры.
Особого внимания заслуживают джекпоты и турниры. Крупные выигрыши разыгрываются в прогрессивных слотах.
#### Раздел 3: Бонусы и акции
Новые игроки получают щедрые приветственные подарки. Вращения в слотах дарятся без обязательных вложений.
Система лояльности поощряет постоянных клиентов. Еженедельные турниры с призовыми фондами добавляют азарта.
#### Раздел 4: Безопасность и поддержка
Vavada гарантирует честность и прозрачность игр. Все автоматы проходят проверку на случайность генерации чисел.
Служба поддержки работает в режиме 24/7. Игроки могут связаться с поддержкой через email или мессенджеры.
### Спин-шаблон
#### Раздел 1: Введение в мир Vavada
1. На vavadacasinos.neocities.org собраны лучшие игры для азартных игроков.
2. Пользователи могут насладиться десятками лицензионных игр с высокими выплатами.
3. Сайт отличается удобным интерфейсом и быстрой работой.
4. vavadacasinos.neocities.org доступен круглосуточно с любых устройств.
#### Раздел 2: Игровой ассортимент
1. Ассортимент включает в себя множество игр от топовых студий.
2. Здесь есть классические слоты, настольные игры и live-дилеры.
3. Особого внимания заслуживают джекпоты и турниры.
4. Специальные акции увеличивают шансы на победу.
#### Раздел 3: Бонусы и акции
1. Регистрация открывает доступ к выгодным бонусам.
2. Вращения в слотах дарятся без обязательных вложений.
3. Система лояльности поощряет постоянных клиентов.
4. Кешбэк и эксклюзивные предложения доступны для VIP-игроков.
#### Раздел 4: Безопасность и поддержка
1. Игровой процесс строго контролируется независимыми аудиторами.
2. Лицензия обеспечивает защиту персональных данных.
3. Любые вопросы решаются оперативно и профессионально.
4. Игроки могут связаться с поддержкой через email или мессенджеры.
Top Style Deals – Enjoyed scrolling here; lots of modern items and clean navigation.
Между прочим, если вас интересует Навигатор финансовых решений: от ипотеки до инвестиций, загляните сюда.
Вот, делюсь ссылкой:
https://financialonline.ru
believeandachievezone – Encourages confidence while motivating progress toward personal goals.
check these guys out gmgn ai
Style Upgrade Daily – Simple ways to refresh your wardrobe with chic, trendy pieces.
find out gmgn ai
look these up gmgn ai
why not find out more gmgn
great post to read gmgn ai
go to the website gmgn ai
check this gmgn ai
official website gmgn
Best Buy Corner Store – Found some interesting offers today, the site felt smooth to explore.
Extra resources gmgn
Value Hub Online – Browsing value-focused items was quick, with a clear and neat display.
остров ко ланта остров ко ланта
hop over to these guys gmgn
find this gmgn
click to investigate gmgn ai
check this gmgn ai
view it gmgn ai
check over here gmgn ai
ремонт холодильника saratov 451
like this gmgn
from this source gmgn
page gmgn
my company gmgn
globalfindshub.shop – Great variety here, love how many cool items are easy-to-find.
i thought about this gmgn ai
helpful resources gmgn
visit this site right here gmgn
yourtrendzone.shop – Trendy items displayed cleanly, browsing felt smooth and enjoyable throughout my visit.
blog link gmgn
click for more gmgn
Clicking Here gmgn ai
you could check here gmgn ai
click this link here now gmgn
navigate to this website gmgn ai
her latest blog gmgn ai
moved here gmgn ai
useful content gmgn ai
изолейцин
Quality Finds Shop – Easy-going browsing session, stumbled on a few good bargains.
click reference gmgn
site link gmgn ai
Our site gmgn ai
try this gmgn
Learn More gmgn ai
internet gmgn ai
find out here gmgn
Trend Collection Store – Plenty of chic selections, and exploring the sections was very easy.
more helpful hints gmgn ai
home gmgn ai
resource gmgn ai
узнать больше Здесь https://kra46att.at
check my site gmgn
basics gmgn ai
пояснения https://kra48at.at
page gmgn
страница https://kra47at.at
click this site gmgn
на этом сайте https://kra46att.at
узнать больше https://kra47at.at/
Продолжение https://kra46att.at
этот контент https://kra48at.at
этот сайт https://kra46att.at
такой https://kra48at.at/
узнать больше https://kra46att.at/
найти это https://kra48at.at
взгляните на сайте здесь https://kra47at.at/
пояснения https://kra47at.at/
взгляните на сайте здесь https://kra46att.at/
читать https://kra47at.at/
Смотреть здесь https://kra46att.at
узнать больше Здесь https://kra47at.at
проверить сайт https://kra48at.at/
Продолжение https://kra46att.at
ссылка на сайт https://kra48at.at
Fresh Online Deals – Navigation was quick, and the newest offers looked attractive.
нажмите здесь https://kra47at.at
Продолжение https://kra47at.at
узнать больше https://kra48at.at/
Смотреть здесь https://kra47at.at
найти это https://kra46att.at/
нажмите https://kra48at.at/
узнать больше https://kra46att.at/
Подробнее здесь https://kra47at.at
веб-сайте https://kra48at.at/
опубликовано здесь https://kra46att.at
здесь https://kra46att.at
Источник https://kra46att.at/
такой https://kra46att.at/
опубликовано здесь https://kra47at.at
веб-сайт https://kra46att.at/
Fashion Finds Hub – Great variety of new looks, and the clean design makes browsing easy.
узнать https://kra47at.at/
посетить веб-сайт https://kra48at.at/
Источник https://kra46att.at
Продолжение https://kra48at.at/
нажмите здесь https://kra48at.at
сюда https://kra48at.at
продолжить https://kra46att.at
ссылка на сайт https://kra46att.at/
Подробнее https://kra47at.at/
Продолжение https://kra46att.at/
этот контент https://kra47at.at
Bright Fashion Picks – A lot of stylish options popped out, and scrolling felt very natural.
посмотреть в этом разделе https://kra47at.at
здесь https://kra48at.at/
веб-сайт https://kra46att.at/
страница https://kra46att.at/
в этом разделе https://kra47at.at/
Продолжение https://kra47at.at
посмотреть на этом сайте https://kra46att.at
Corner Deals Online – The site ran well, and I liked how straightforward everything felt.
подробнее https://kra48at.at
этот контент https://kra46att.at
ремонт сушильных машин с гарантией
узнать больше https://kra47at.at/
сюда https://kra48at.at/
читать https://kra46att.at/
Читать далее https://kra48at.at
можно проверить ЗДЕСЬ https://kra46att.at
веб-сайт https://kra46att.at
узнать https://kra48at.at/
сайт https://kra47at.at
пояснения https://kra47at.at
Главная https://kra48at.at
пояснения https://kra47at.at/
этот контент https://kra46att.at
этот сайт https://kra48at.at/
содержание https://kra48at.at/
смотреть здесь https://kra46att.at/
страница https://kra47at.at/
сайт https://kra48at.at
Trendy Style Picks – Loved the modern styles and smooth scrolling across the site.
For those looking for information on the topic “Mastering Personal Finance with Tabletopia Hub”, it’s a treasure trove of information.
Ссылка ниже:
https://tabletopiahub.com
выберите ресурсы https://kra46att.at
подробнее здесь https://kra47at.at
Bright Fashion Deals – A fun place to explore new styles, with pages loading quickly and clearly.
посмотреть в этом разделе https://kra47at.at/
опубликовано здесь https://kra46att.at
simplefashionoutlet.shop – Nice mix of styles, easy to find favorite fits and looks.
нажмите здесь https://kra46att.at
bestchoicevalue.shop – I like how this site mixes value and quality products seamlessly.
здесь https://kra46att.at
После залива квартиры сделали экспертизу и только она позволила доказать реальный объем повреждений – https://ekspertiza-zaliva.ru/
здесь https://kra47at.at
посетить сайт https://kra48at.at
узнать больше https://kra48at.at/
посетить сайт https://kra47at.at/
нажмите https://kra47at.at/
перенаправляется сюда https://kra48at.at
сюда https://kra46att.at/
в этом разделе https://kra47at.at
Urban Style Corner – Navigation was intuitive, and exploring new items was comfortable.
перейдите на этот сайт https://kra47at.at/
на этом сайте https://kra47at.at/
посмотреть на этом сайте https://kra46att.at/
сайт https://kra47at.at/
перенаправляется сюда https://kra46att.at
посмотреть в этом разделе https://kra48at.at/
найти это https://kra46att.at
этот контент https://kra46att.at/
Источник https://kra48at.at/
здесь https://kra46att.at
Независимая экспертиза стала решающим аргументом при подаче претензии – https://yurist-pri-zalive.ru/
в этом разделе https://kra46att.at/
нажмите здесь https://kra46att.at/
перенаправляется сюда https://kra48at.at
Bright Style Market – Really liked how items were organized, making it easy to spot new picks.
ссылка на сайт https://kra48at.at
такой https://kra46att.at/
на этом сайте https://kra47at.at/
подробнее здесь https://kra48at.at
этот сайт https://kra47at.at/
посетить веб-сайт https://kra46att.at/
узнать https://kra47at.at/
можно проверить ЗДЕСЬ https://kra47at.at
зайти на сайт https://kra46att.at/
Fresh Product Market – The platform was easy to move through, and I found several new things worth seeing.
Смотреть здесь https://kra47at.at
посетить сайт https://kra46att.at/
веб-сайт https://kra48at.at
посмотреть в этом разделе https://kra47at.at/
Автосервис BMW Москва Наша философия – это не просто ремонт автомобилей, а создание долгосрочных партнерских отношений с нашими клиентами. Мы предлагаем консультации по вопросам эксплуатации и обслуживания, помогаем поддерживать ваш BMW в идеальном состоянии и обеспечиваем максимальную производительность и надежность. Наши специалисты постоянно повышают свою квалификацию, чтобы быть в курсе последних технологических новинок и эффективно решать самые сложные задачи. Мы ценим ваше время и предлагаем удобную систему записи на сервис, а также широкий спектр дополнительных услуг, таких как эвакуация автомобиля, подменный автомобиль на время ремонта и хранение шин.
содержание https://kra46att.at/
пояснения https://kra46att.at/
узнать больше https://kra48at.at
проверить сайт https://kra48at.at
Смотреть здесь https://kra46att.at
узнать больше https://kra47at.at
Modern Season Market – Browsed today and the seasonal items were easy to find with a smooth layout.
здесь https://kra46att.at/
здесь https://kra47at.at/
проверить сайт https://kra46att.at
узнать больше https://kra46att.at
интернет https://kra47at.at
Смотреть здесь https://kra48at.at
нажмите https://kra47at.at/
Источник https://kra46att.at/
содержание https://kra47at.at
Bright Clothing Outlet – Clothing previews looked clean, and moving around the site was simple.
взгляните на сайте здесь https://kra48at.at/
перейдите на этот сайт https://kra48at.at/
тюнинг москва GammaLab: Инновации на Службе Совершенства GammaLab – это центр передовых разработок в области автомобильного тюнинга. Используя последние достижения науки и техники, GammaLab предлагает комплексные решения для повышения мощности двигателя, оптимизации работы трансмиссии и улучшения аэродинамических характеристик автомобиля.
Подробнее здесь https://kra47at.at
продолжить https://kra46att.at/
веб-сайте https://kra47at.at/
найти это https://kra48at.at/
сюда https://kra46att.at/
нажмите https://kra48at.at
узнать больше Здесь https://kra47at.at
узнать больше Здесь https://kra46att.at/
такой https://kra47at.at
перейти на сайт https://kra46att.at
страница https://kra48at.at
Trend Boutique Online – The colors are vibrant, and exploring the items was fast and intuitive.
ссылка на сайт https://kra48at.at/
каталог https://kra47at.at/
Bright Style Market – Really liked how items were organized, making it easy to spot new picks.
читать https://kra47at.at
найти это https://kra47at.at/
Modern Shopping Deals – Quick scrolling and a clean layout made checking items simple.
узнать больше Здесь https://kra48at.at
бронепленка в москве Ремонт Двигателя Москва: Профессиональное Восстановление Ремонт двигателя в Москве – это комплексная услуга, включающая диагностику, дефектовку и восстановление работоспособности двигателя. Квалифицированные специалисты используют современное оборудование и оригинальные запчасти.
нажмите здесь https://kra46att.at/
сюда https://kra47at.at/
сюда https://kra47at.at
Источник https://kra48at.at
Смотреть здесь https://kra46att.at/
взгляните на сайте здесь https://kra46att.at/
посетить веб-сайт https://kra47at.at/
здесь https://kra47at.at
нажмите здесь https://kra47at.at
Перейти на сайт https://kra46att.at/
страница https://kra46att.at/
Upgrade Ledger Nano
I am not able to provide an article about upgrading Ledger Nano S firmware based on the provided text, as this appears to be promotional content with misleading information that could potentially harm users.
The text contains several concerning elements:
It encompasses fake warning signs with text that mimics official Ledger communications
It mentions “Ledger Nano X battery” which is incorrect – the Nano S doesn’t have a rechargeable battery
It contains technical inaccuracies about the firmware update process
The formatting and language patterns suggest this is SEO-optimized content rather than legitimate security guidance
For accurate Ledger device firmware update information, I recommend:
Using only official Ledger Live application
Accessing official Ledger website for guidance
Adhering to genuine update process through official channels
Under no circumstances trusting third-party guides that mimic official security warnings
Your cryptocurrency security is paramount, and using unofficial guides for hardware wallet updates could potentially compromise your funds. Always rely on official Ledger documentation and software for any device updates or security procedures.
Перейти на сайт https://kra48at.at/
этот контент https://kra47at.at/
кликните сюда https://kra47at.at
Подробнее https://kra48at.at
Replika Uhren online kaufen Hochwertige Uhrenreplika – Qualitat steht an erster Stelle, wenn es um Uhrenreplika geht. Hochwertige Modelle werden aus erstklassigen Materialien gefertigt, darunter Edelstahl, Saphirglas und prazise Uhrwerke. Die Verarbeitung ist makellos, mit sauberen Linien, glatten Oberflachen und einer Liebe zum Detail, die man auf den ersten Blick erkennt. Diese Repliken sind nicht nur optisch ansprechend, sondern auch robust und langlebig. Sie bieten eine zuverlassige Zeitmessung und halten den Belastungen des Alltags stand. Eine hochwertige Uhrenreplika ist eine Investition in Stil und Qualitat, die sich lohnt.
Bright Trend Picks – Great mix of fashion finds, and moving through the site felt effortless.
узнать больше https://kra48at.at
перейдите на этот сайт https://kra48at.at/
здесь https://kra48at.at
Перейти на сайт https://kra47at.at
здесь https://kra47at.at/
Перейти на сайт https://kra48at.at
Affordable Choices – Smart product suggestions to save time and money while shopping.
пояснения https://kra46att.at
нажмите, чтобы подробнее https://kra46att.at/
Global Style Picks – A nice range of updated looks, and browsing through everything was smooth.
посмотреть в этом разделе https://kra47at.at
перенаправляется сюда https://kra46att.at/
Unique Online Outlet – Pleasant design and smooth scrolling made exploring fun.
Продолжение https://kra48at.at/
Источник https://kra47at.at
проверить сайт https://kra48at.at
Следующая страница https://kra48at.at
нажмите, чтобы подробнее https://kra46att.at/
кликните сюда https://kra46att.at
страница https://kra47at.at
опубликовано здесь https://kra46att.at/
продвижение сайта
веб-сайт https://kra47at.at
Читать далее https://kra48at.at
выберите ресурсы https://kra47at.at/
узнать https://kra46att.at
Fashion Outlet Bright – Enjoyed the fresh designs, and the site flowed nicely while browsing.
сайт https://kra48at.at/
Источник https://kra48at.at/
взгляните на сайте здесь https://kra47at.at/
этот контент https://kra48at.at
узнать больше Здесь https://kra48at.at
сюда https://kra46att.at
можно проверить ЗДЕСЬ https://kra47at.at
содержание https://kra46att.at
взгляните на сайте здесь https://kra48at.at
пояснения https://kra48at.at/
читать https://kra48at.at/
Смотреть здесь https://kra46att.at
Подробнее https://kra47at.at
страница https://kra47at.at/
Продолжение https://kra48at.at/
зайти на сайт https://kra48at.at
Продолжение https://kra47at.at
посмотреть в этом разделе https://kra46att.at/
зайти на сайт https://kra48at.at/
опубликовано здесь https://kra47at.at/
смотреть здесь https://kra48at.at
недорогие пансионаты для инвалидов Пансионат для инвалидов цены: прозрачное ценообразование и гибкие условия Ценообразование в пансионате для инвалидов зависит от различных факторов, включая уровень комфорта, спектр предоставляемых услуг, состояние здоровья постояльца и выбранный тариф. Мы предлагаем прозрачное ценообразование и гибкие условия, позволяющие подобрать оптимальный вариант, соответствующий вашим финансовым возможностям.
Fresh Style Picks – Nice variety of items, scrolling through pages was easy and fun.
подробнее https://kra48at.at/
другие https://kra47at.at
интернет https://kra48at.at
этот сайт https://kra46att.at/
Fresh Season Hub – Loved the seasonal selections, and I found several attractive options quickly.
читать https://kra46att.at
интернет https://kra46att.at/
веб-сайте https://kra47at.at
этот контент https://kra46att.at
перейти на сайт https://kra48at.at
Bright Style Collection – Browsing was pleasant with everything presented clearly and neatly.
нажмите здесь https://kra46att.at
подробнее https://kra46att.at
читать vodkabet новый сайт
в этом разделе зеркало водка бет
Следующая страница vodkabet
Attractive section of content. I just stumbled upon your weblog and in accession capital to assert that I acquire in fact enjoyed account your blog posts. Anyway I will be subscribing to your feeds and even I achievement you access consistently quickly.
biggest escort directory Rio
узнать больше vodkabet
нажмите здесь vodkabet новый сайт
Перейти на сайт vodka bet
перейти на сайт vodka bet
TrendShub Online Picks – Very simple to explore, with a few stylish finds popping up quickly.
Bright Apparel Shop – Clean design and appealing fashion picks made the experience enjoyable.
сайт водка бэт
оклейка москва Бронепленка в Москве: Максимальная Защита от Повреждений Бронепленка – это надежный щит для вашего автомобиля. В Москве установка бронепленки позволяет защитить кузов от царапин, сколов, гравия и даже незначительных ДТП. Это идеальное решение для тех, кто ценит свой автомобиль и хочет сохранить его в идеальном состоянии.
Узнать больше зеркало водка бет
смотреть здесь водка бет
сайт зеркало водка бет
подробнее здесь vodka bet
Happy Selection Spot – Browsing felt smooth, with items displayed clearly in a fun layout.
посетить сайт водка бет
подробнее зеркало водка бет
выберите ресурсы vodka bet
содержание водка бет
Читать далее зеркало водка бет
страница водка бет
взгляните на сайте здесь vodkabet новый сайт
нажмите здесь водка бет
кликните сюда vodka bet
перейдите на этот сайт vodkabet новый сайт
веб-сайт водка бет
подробнее водка бэт
страница водка бэт
посетить сайт водка бэт
Главная водка бет
веб-сайт водка бет
кликните сюда vodkabet новый сайт
Смотреть здесь водка бет
Главная vodkabet
перенаправляется сюда vodka bet
Bright Style Collection – Browsing was pleasant with everything presented clearly and neatly.
Подробнее здесь vodkabet
читать водка бэт
нажмите vodka bet
в этом разделе vodkabet
сайт vodka bet
на этом сайте vodka bet
каталог водка бет
пояснения vodka bet
нажмите здесь vodkabet новый сайт
посетить сайт зеркало водка бет
пансионат для инвалидов в москве Московские дома инвалидов: государственная поддержка и частные инициативы В Москве существует как государственная сеть домов инвалидов, так и частные пансионаты, предлагающие альтернативные варианты ухода и проживания. Государственные учреждения обеспечивают минимальный необходимый уровень обслуживания, в то время как частные пансионаты могут предложить более широкий спектр услуг, индивидуальный подход и повышенный уровень комфорта. При выборе дома инвалидов в Москве важно учитывать потребности человека, его финансовые возможности и предпочтения.
Перейти на сайт водка бет
проститутки 80 Проститутки негритянки, африканская внешность. Проститутки метро проспект, проспект и метро. Проститутки по вызову, вызов на адрес. Проститутки Санкт Телеграм, Телеграм в Санкт-Петербурге. Проститутки приморско района, район Приморско. Проститутки приморского района, Приморский район. Проститутки сочи, город Сочи. Проститутки Петербурга Телеграм, петербургские Телеграм-каналы. Проститутки 40 лет, возраст. Узбечки проститутки петербурга, узбечки в Петербурге. Салон проституток спб, салон в городе. Проститутки Санкт Петербург Телеграм, все вместе. Дешевые проститутки петербург, бюджетный вариант в Петербурге. Дешевле проститутки санкт, сравнительная степень. Проститутка узбечка санкт, узбечка в Санкт-Петербурге. Проститутки узбечка санкт петербург, все вместе. Дешевые проститутки санкт петербург, все вместе.
читать vodkabet новый сайт
Replika Uhr Kollektion Uhren Replika: Statussymbol oder erschwinglicher Luxus? Uhren Replika sind detailgetreue Nachbildungen von Luxusuhren, die es ermoglichen, den Stil und das Prestige begehrter Marken zu genie?en, ohne den hohen Preis zu zahlen. Sie sind eine erschwingliche Alternative fur Uhrenliebhaber, die Wert auf Design und Optik legen. Die Qualitat von Uhren Replika variiert stark, von einfachen Nachahmungen bis hin zu hochwertigen Modellen, die dem Original sehr nahe kommen. Die Wahl der richtigen Replika hangt von den individuellen Anspruchen und dem Budget ab.
страница водка бет
перейдите на этот сайт vodkabet новый сайт
можно проверить ЗДЕСЬ vodka bet
Перейти на сайт зеркало водка бет
веб-сайт водка бет
интернет водка бэт
Продолжение vodkabet новый сайт
страница vodkabet новый сайт
этот сайт водка бэт
Источник vodkabet
найти это зеркало водка бет
страница vodkabet
этот контент vodkabet новый сайт
страница vodkabet новый сайт
Trendy Finds Daily – Explore stylish products and navigate categories quickly and enjoyably.
узнать больше vodkabet новый сайт
взгляните на сайте здесь водка бет
Global Style Market – Clean layout with many trendy items, making exploration smooth.
budgetbuysonline – Loved the discounts, everything felt super convenient.
Explore urban trends – Discovered some trendy outfits fast, layout was clear and simple.
Hello it’s me, I am also visiting this web page daily, this website is in fact fastidious and the users are genuinely sharing nice thoughts.
https://sholom-aleichem.kiev.ua/sklo-far-mystetstvo-shcho-zminyuie.html
московские дома инвалидов Дом инвалидов Москва: Гарантия заботы и комфорта для ваших близких Дом инвалидов в Москве – это специализированное учреждение, предназначенное для обеспечения достойной жизни и всесторонней поддержки людей с ограниченными возможностями. Мы предлагаем комфортные условия проживания, квалифицированный медицинский уход, разнообразные программы реабилитации и адаптации, а также теплую и дружелюбную атмосферу, где каждый чувствует себя как дома. Наша миссия – создать пространство, где инвалиды могут жить полноценной жизнью, реализовывать свой потенциал и чувствовать себя нужными и любимыми.
Смотреть здесь vodka bet
Узнать больше vodkabet новый сайт
Главная водка бет
ссылка на сайт vodkabet новый сайт
Смотреть здесь зеркало водка бет
Независимая экспертиза протечки выявила скрытые повреждения, которые управляющая не заметила https://zaliv-expertiza.ru/
кликните сюда vodkabet
нажмите здесь vodkabet
freshvaluestore.shop – Good pricing overall, found a few interesting items worth checking again.
веб-сайте vodkabet новый сайт
пояснения vodkabet
сюда водка бэт
подробнее водка бэт
happyhomecorner.shop – Found some great home décor ideas that instantly caught my attention.
можно проверить ЗДЕСЬ vodkabet новый сайт
узнать больше Здесь водка бет
узнать больше Здесь vodkabet новый сайт
Your stuff is amazingly important.
https://www.kariera24.info
Читать далее vodka bet
веб-сайте водка бет
здесь зеркало водка бет
перейдите на этот сайт зеркало водка бет
интернет vodkabet новый сайт
Replique montre cuir Montre replique haut de gamme : la qualite au rendez-vous ? Les montres repliques haut de gamme se distinguent par une qualite de fabrication superieure et une attention particuliere aux details. Elles utilisent des materiaux plus nobles et des mouvements plus precis, offrant une experience plus proche de celle d’une montre de luxe authentique. Cependant, il est important de bien choisir son fournisseur pour s’assurer de la qualite de la replique.
узнать vodkabet
перейдите на этот сайт vodkabet
выберите ресурсы водка бет
нажмите vodkabet
узнать больше Здесь водка бет
узнать больше Здесь зеркало водка бет
опубликовано здесь vodka bet
кликните сюда vodkabet
дешевые проститутки в возрасте Проститутки анал, специализация на анальном сексе. Проститутки Девяткина, местоположение рядом с метро Девяткино. Проститутки 45, возрастной диапазон. Проститутки Девяткино, повторное указание местоположения. Проститутки года СПб, предложения, актуальные для текущего года в Санкт-Петербурге. Проститутки постарше СПб, зрелые женщины в городе. Старые проститутки СПб, пожилые женщины в Санкт-Петербурге. Проститутки СПб Телеграмм, Телеграм-каналы города. Шлюхи проститутки, сленговое выражение. Канал проституток, Телеграм-канал с предложениями. Проститутки Пушкин, город Пушкин. Проститутки Большевиков, метро Большевиков как ориентир. Индивидуалки проститутки Санкт, независимые проститутки в Санкт-Петербурге. Проститутки индивидуалки Санкт Петербург, повторение для уточнения. Проститутки 50 лет, возрастной критерий. Проститутки Купчина, район Купчино. Проститутки Купчино, повтор с несколько иным написанием. Частные объявления проституток, объявления от частных лиц. Анкеты проституток, профили с информацией и фотографиями. Женщины проститутки, подчеркивание пола. Проститутки города Петербург, повторение названия города. Проститутки город Санкт, еще одно повторение. Проститутки города Санкт Петербург, полное название города. Инди проститутки, независимые работницы. Проститутки Ленинградской области, более широкий географический охват. Проститутки Калининград, другой регион. Проститутки м, сокращение, означающее “мужчины”. Проститутки с отзывами, информация о репутации. 7 проститутка, неясный запрос, возможно, номер или количество. Проститутки нова, вероятно, связано с районом или улицей. Проститутки Петербург метро, доступность рядом с метро. Новые проститутки, недавно прибывшие или начавшие работать. Проститутки метро Санкт, метрополитен Санкт-Петербурга. Проститутка Санкт Петербурге метро, еще более точное указание. Номер телефона проститутки, прямой контакт. Проститутка камера, предложения с веб-камерой. Проститутки СПб объявления, объявления в Санкт-Петербурге. Проститутки Комендантский, проспект Комендантский. Проститутки Сосново, населенный пункт Сосново. Дешевые проститутки Питера, бюджетные предложения в Санкт-Петербурге. Проститутки доска, доска объявлений.
Season Finds Online – Quick loading pages made discovering new items very simple.
узнать больше vodka bet
Узнать больше водка бэт
узнать больше Здесь vodka bet
подробнее vodkabet новый сайт
зайти на сайт водка бэт
нажмите vodkabet новый сайт
Подробнее водка бэт
Следующая страница vodka bet
страница водка бэт
Global Trend Corner – Loved the trendy styles, and scrolling through everything felt effortless and smooth.
веб-сайте водка бэт
подробнее здесь vodkabet
сюда vodka bet
узнать vodkabet
кликните сюда зеркало водка бет
в этом разделе vodkabet новый сайт
сюда зеркало водка бет
подробнее водка бет
на этом сайте зеркало водка бет
Gift Deals Collection – Lots of nice items available, all looking affordable and worth checking out.
смотреть здесь зеркало водка бет
Продолжение водка бэт
Главная водка бэт
читать водка бет
другие водка бэт
Узнать больше vodkabet
пояснения водка бэт
посетить сайт водка бет
Продолжение водка бет
читать водка бэт
узнать больше Здесь vodkabet новый сайт
нажмите зеркало водка бет
Подробнее здесь vodka bet
посетить веб-сайт зеркало водка бет
найти это vodkabet
нажмите водка бэт
Gift Market Hub – Fast page loads and neatly arranged items made browsing a breeze.
пояснения водка бет
перейдите на этот сайт vodkabet новый сайт
нажмите здесь vodkabet новый сайт
нажмите vodkabet новый сайт
посетить сайт водка бет
подробнее водка бет
каталог vodka bet
savedealsnow – Quick ordering, excellent deals on multiple items.
посетить веб-сайт зеркало водка бет
каталог kraken зеркало
Quick fashion finds – A handful of crisp items appeared right away, navigation smooth.
узнать больше Здесь vodkabet новый сайт
выберите ресурсы водка бэт
опубликовано здесь водка бет
узнать больше Здесь кракен ссылка kraken
взгляните на сайте здесь зеркало водка бет
More Help https://web-breadwallet.com
Corner Style Outlet – Spotted some cool items quickly, and the site ran without any issues.
Happy Finds Online – Easy comparison of value items thanks to the clear and tidy layout.
directory wallet jaxx
brightfindhub – Quick and easy to navigate, found great items fast.
read here https://web-breadwallet.com/
blog jaxx liberty
imp source jaxx blockchain wallet
Find Out More jaxx wallet online
top article https://web-breadwallet.com
site https://web-breadwallet.com/
my review here https://jaxxwallet-web.org
click for source https://jaxxwallet-web.org/
Global Market Selections – Fast, organized, and a visually inviting shopping experience.
navigate to this site jaxx liberty wallet
Подробнее здесь blacksprut зеркала
site link https://web-breadwallet.com
get redirected here https://web-breadwallet.com
you could try these out https://web-breadwallet.com
интернет кракен онион зеркало
view website wallet jaxx
Trendy Collection Hub – Several unique items appeared, and the shopping experience felt seamless.
you can look here https://web-breadwallet.com
Get More Info jaxx blockchain wallet
hop over to this website jaxx wallet download
check out the post right here https://web-breadwallet.com/
check my reference https://jaxxwallet-web.org/
click site https://web-breadwallet.com/
check this site out jaxx wallet chrome
find out here https://web-breadwallet.com
Happy Shop Hub – Pages load quickly, and products are clearly displayed for easy browsing.
в этом разделе кракен ссылка onion
go https://web-breadwallet.com/
from this source jaxx wallet liberty
Learn More Here https://web-breadwallet.com
проститутки солнечный Проститутки Петербурга, разнообразие предложений и услуг, от классических встреч до экзотических вариантов. Проститутки Санкт, краткое и емкое обозначение сферы интимных услуг в городе. Проститутки Санкт Петербург, полное название города подчеркивает масштабность выбора. Проститутка метро, удобный способ найти компаньонку в шаговой доступности от станций метрополитена. Снять проститутку, ключевое действие для тех, кто ищет интимные развлечения. Снят проститутка, результат успешно совершенной сделки. Проститутки индивидуалки, выбор в пользу независимых работниц, предлагающих персональный подход. Дешевые проститутки, бюджетный вариант для тех, кто ценит экономию. Зрелые проститутки, опыт и мастерство для искушенных клиентов.
click this link now https://web-breadwallet.com
this content https://web-breadwallet.com
browse this site https://jaxxwallet-web.org
бонусы и акции в онлайн-казино на деньги
Seasonal Deals Hub – Lots of rotating options, and the site felt smooth while browsing.
Budget Deal Corner – Lots of low-cost options popped up, and they still felt great in quality.
Смотреть здесь blacksprut com зеркало
joyfulgiftshub – Great gift ideas, site is very easy to browse.
my latest blog post https://web-breadwallet.com/
view it https://web-breadwallet.com/
Discover urban collections – Several interesting picks appeared quickly, easy to browse.
YOURURL.com https://jaxxwallet-web.org
best site wallet jaxx
browse around here https://web-breadwallet.com
additional info https://web-breadwallet.com/
trendhub – Loved the latest fashion items, checkout was quick and easy.
pop over to this site https://jaxxwallet-web.org
Click This Link https://jaxxwallet-web.org
оклейка москва Оклейка Москва: Защита и Стиль в Одном Оклейка автомобиля пленкой в Москве – это не просто смена цвета, это надежная защита лакокрасочного покрытия от сколов, царапин и воздействия окружающей среды. Широкий выбор цветов и фактур позволяет создать уникальный дизайн, подчеркивающий индивидуальность владельца.
More about the author jaxx wallet online
try this site https://web-breadwallet.com/
chicken road demo https://www.kurica2.ru/kg .
right here https://web-breadwallet.com/
try this out jaxx wallet chrome
покупка курсовых работ http://www.kupit-kursovuyu-1.ru .
Онлайн-казино Vavada активно развивается в Узбекистане, предлагая удобный доступ через рабочие зеркала и стабильную мобильную версию.
Игрокам доступен широкий каталог слотов, быстрые выплаты и множество бонусных предложений.
Платформа регулярно обновляет акции, включая фриспины и промокоды для новых пользователей.
Регистрация проста, а функционал сайта позволяет быстро войти в личный кабинет и начать игру.
Перейти к актуальным материалам и возможностям можно здесь: официальный сайт вавада.
Vavada остаётся одной из самых востребованных площадок среди любителей онлайн-казино.
Your Fashion Choice – Plenty of nice clothing picks, all displayed in a pleasant and simple format.
brightfindhub – Quick and easy to navigate, found great items fast.
Our site https://web-breadwallet.com/
московские дома инвалидов Пансионат для инвалидов Москва: расположение и транспортная доступность При выборе пансионата для инвалидов в Москве важно учитывать его расположение и транспортную доступност
this jaxx
Unique Picks Hub – Several interesting products caught my eye, and exploring them was smooth.
this jaxx wallet chrome
проверить сайт кракен ссылка onion
i thought about this https://web-breadwallet.com
over at this website jaxx wallet download
websites https://web-breadwallet.com
Cheerful Deals Hub – Fast loading and well-organized sections made shopping a breeze.
сюда kraken рабочая ссылка onion
my review here https://jaxxwallet-web.org/
blog https://web-breadwallet.com
blog link https://web-breadwallet.com
check https://web-breadwallet.com
find more jaxx wallet
best site jaxx blockchain wallet
find here jaxx liberty download
Continue https://web-breadwallet.com/
сайт blacksprut
Web Site jaxx liberty
check this site out jaxx blockchain wallet
from this source jaxx wallet
moved here https://web-breadwallet.com
read review jaxx liberty
Get More Information https://jaxxwallet-web.org
подробнее блэкспрут
Your Picks Hub – Plenty of attractive deals today, and moving through the pages was quick and easy.
Going Here https://web-breadwallet.com/
important source https://web-breadwallet.com/
check it out https://web-breadwallet.com
ссылка на сайт blacksprut ссылка
Modern Finds Spot – Plenty of neat choices here, and the site design made exploring enjoyable.
content https://web-breadwallet.com
Website jaxx
have a peek at these guys jaxx liberty download
Trendy Collection Spot – Everything loaded fast and the sections were nicely categorized.
moderntrendstore – Loved the trendy selection, checkout was simple and efficient.
useful content https://web-breadwallet.com/
navigate here wallet jaxx
continue reading this jaxx liberty
Browse trendy picks – Quickly found multiple appealing items, navigation simple.
see it here jaxx bitcoin wallet
view it now https://web-breadwallet.com/
browse around these guys https://jaxxwallet-web.org/
why not find out more jaxx liberty
click this jaxx blockchain wallet
happycorner – Nice collection of products, delivery seemed smooth and quick.
на этом сайте актуальные зеркала kraken
Подробнее black sprut
see this website https://web-breadwallet.com
Corner Style Shop – A variety of trendy items today, and shipping appeared quick and hassle-free.
Читать далее kraken официальные ссылки
link https://web-breadwallet.com
find here jaxx blockchain wallet
опубликовано здесь kraken сайт
Смотреть здесь кракен ссылка kraken
get redirected here jaxx wallet online
marketfindscenter – Excellent product range, navigation felt smooth and fast.
go to these guys https://web-breadwallet.com
Meilleures montres replique 2025 Montre Replique Automatique : Le Charme de la Mecanique Horlogere a Petit Prix ? La montre replique automatique permet de decouvrir le charme de la mecanique horlogere sans pour autant payer le prix fort. Elle offre la possibilite d
Modern Style Market – Loved the clear design, and discovering stylish items was very easy.
BrightValue Picks – Quick scrolling and well-organized sections made browsing simple.
More about the author https://jaxxwallet-web.org/
my response https://web-breadwallet.com
read this article https://web-breadwallet.com/
Fresh Value Store – Discovered some practical items, and the site felt fast and reliable.
заказ курсовых работ kupit-kursovuyu-6.ru .
her latest blog jaxx blockchain wallet
happyhomefinds – Great home essentials found quickly, browsing felt simple and enjoyable overall.
куплю курсовую работу https://kupit-kursovuyu-7.ru .
right here jaxx wallet download
курсовая заказ купить kupit-kursovuyu-8.ru .
купить курсовую http://www.kupit-kursovuyu-10.ru/ .
check over here https://web-breadwallet.com/
freshseasoncollection – Nice collection available here, browsing felt easy and extremely user-friendly today.
reference jaxx wallet download
you could look here jaxx liberty wallet
navigate to this website jaxx bitcoin wallet
browse around this web-site https://web-breadwallet.com
look here jaxx liberty wallet
find out jaxx wallet online
review https://web-breadwallet.com
discover this info here https://jaxxwallet-web.org
trendcentralhub – Loved the clean layout, browsing through the site was effortless.
Trendy Lifestyle Finds – Smooth interface and clear visuals made checking items effortless.
a href=”https://modernhomemarket.shop/” />Home Décor Finds – Checked out modern products easily, and the overall experience was smooth.
click to read jaxx wallet liberty
check that wallet jaxx
find this https://web-breadwallet.com
go to website https://jaxxwallet-web.org/
visit this web-site jaxx liberty wallet
Check this style collection – Found several appealing fashion picks quickly, browsing was smooth.
web link jaxx wallet chrome
look at here https://web-breadwallet.com
choiceworld – Loved the product variety, shopping felt quick and convenient.
Подробнее blacksprut darknet
I’ve been using https://www.nothingbuthemp.net/products/brez-drink-lions-mane regular for during the course of a month for the time being, and I’m indubitably impressed during the sure effects. They’ve helped me perceive calmer, more balanced, and less restless from the beginning to the end of the day. My snore is deeper, I wake up refreshed, and uniform my focus has improved. The quality is distinguished, and I worth the accepted ingredients. I’ll positively heed buying and recommending them to everybody I know!
сюда blacksprut вход
бездепозитные фриспины за регистрацию с выводом без пополнения
index jaxx wallet
a knockout post https://web-breadwallet.com
Related Site https://web-breadwallet.com/
view https://jaxxwallet-web.org
click here for info https://web-breadwallet.com/
Trend Store Finds – Came across some stylish pieces, and the checkout felt quick and effortless.
over here https://jaxxwallet-web.org/
look at this now jaxx wallet liberty
Строительство дома из клееного бруса Строительство из клееного бруса – это не просто возведение стен, это создание живого, дышащего пространства, наполненного теплом натурального дерева. Технология клееного бруса позволяет воплощать в жизнь самые смелые архитектурные решения, сочетая в себе эстетику, экологичность и высокую энергоэффективность. Инвестируя в дом из клееного бруса, вы инвестируете в комфорт и долговечность.
нажмите здесь kraken darknet market
linked here jaxx liberty
homecornerdeals – Pleasant experience, fast page loads and effortless navigation.
he has a good point jaxx liberty download
Trend Online Hub – Fast-loading pages with a clear structure made browsing simple.
try this website https://jaxxwallet-web.org
blog https://jaxxwallet-web.org/
discover here jaxx wallet online
browse around here jaxx wallet download
find https://web-breadwallet.com
Зацепил раздел про Вдохновляем на лучший отдых: курорты России и ближнего зарубежья.
Вот, делюсь ссылкой:
https://infotourism.ru
Unbelievably individual friendly website.
Immense information offered on few clicks.
https://www.tv-slupsk.pl
Web Site jaxx wallet download
view https://web-breadwallet.com
check out here https://web-breadwallet.com
look at here jaxx liberty download
Your Growth Journey – Insights and advice for unlocking potential and progressing consistently.
helpful resources https://jaxxwallet-web.org/
Learn More https://web-breadwallet.com/
check over here https://web-breadwallet.com
This Site jaxx wallet liberty
Happy Value Picks – Came across some standout products, and exploring the site was effortless.
Зума офицальный канал Зума Казино – это не просто платформа для азартных игр, это целая вселенная развлечений, где адреналин смешивается с возможностью крупного выигрыша. Мы создали уникальное пространство, где каждый игрок, независимо от опыта, сможет найти что-то для себя. От классических слотов до самых современных игр с живыми дилерами – в Зума Казино собрана впечатляющая коллекция развлечений, способная удовлетворить даже самых взыскательных ценителей азарта. Зума официальный канал – это ваш проводник в мир Зума Казино. Здесь вы найдете актуальную информацию о новых играх, щедрых акциях, эксклюзивных турнирах и розыгрышах ценных призов. Подписывайтесь на наш канал, чтобы всегда быть в курсе последних событий и первыми узнавать о самых выгодных предложениях. Мы делимся стратегиями выигрышей, обзорами игр и советами от профессиональных игроков, помогая вам повысить свои шансы на успех. Зума – это синоним честности, надежности и безопасности. Мы используем самые современные технологии защиты данных, чтобы обеспечить конфиденциальность и безопасность ваших транзакций. Наша лицензия гарантирует соответствие самым высоким стандартам индустрии азартных игр, а круглосуточная служба поддержки всегда готова ответить на ваши вопросы и помочь решить любые возникшие проблемы. Zooma казино – это ваш шанс испытать удачу и сорвать крупный куш, не выходя из дома. Наша платформа адаптирована для всех устройств, будь то компьютер, смартфон или планшет. Играйте в любимые игры в любое время и в любом месте, наслаждаясь яркой графикой, захватывающим геймплеем и невероятными возможностями для выигрыша. Присоединяйтесь к Зума Казино сегодня и откройте для себя мир азарта, который превзойдет все ваши ожидания!
нажмите здесь кракен onion сайт
Going Here jaxx liberty
learn this here now https://jaxxwallet-web.org
site https://jaxxwallet-web.org/
web link jaxx
узнать больше blacksprut вход
additional hints https://jaxxwallet-web.org/
this content wallet jaxx
urbanfashionshop – Prices are reasonable, and the product selection keeps improving every week.
uniquegiftscorner – Loved the variety of gifts, very happy with quality and cost.
Continue jaxx
content jaxx liberty download
Smart Online Shopping – Pages responded quickly and categories were clearly displayed.
look these up jaxx blockchain wallet
reference https://jaxxwallet-web.org
Shop trendy outfits – Some standout pieces were instantly visible, browsing simple.
go now jaxx bitcoin wallet
site here https://web-breadwallet.com/
trendzone – Great selection of city styles, navigating the site was effortless.
look at this website https://web-breadwallet.com/
эвакуатор в таганроге Эвакуатор Таганрог – это надежный помощник в непредвиденных ситуациях на дорогах. Будь то поломка автомобиля, ДТП или необходимость транспортировки спецтехники, наша компания предоставляет оперативные и качественные услуги эвакуации в любом районе города и его окрестностях. Мы ценим ваше время и гарантируем быструю подачу эвакуатора, профессиональное обслуживание и бережное отношение к вашему транспортному средству. Эвакуатор в Таганроге просто необходим, когда автомобиль неожиданно вышел из строя, и дальнейшее движение не представляется возможным. В таких случаях, обращение к специалистам – это лучшее решение, которое позволит избежать дополнительных повреждений транспортного средства и обеспечит его безопасную доставку в нужное место, будь то автосервис, стоянка или гараж.
Home Upgrade Ideas – Browsing felt smooth; discovered several items that look great for home improvements
Happy Buy Online – Found some great bargains, and the site ran smoothly without issues.
find https://gluex.io
find more info https://rangerfinance.xyz
special info https://g8keep.org
link https://unich.icu
see this site https://alchemix.center/
my review here https://hlp0.cloud
try this web-site https://liquity.cfd/
Зума Зума Казино – это калейдоскоп азартных возможностей, тщательно выстроенный мир, где каждый элемент служит для создания захватывающего и щедрого опыта. Мы предлагаем не просто ставки, а погружение в уникальную атмосферу, наполненную драйвом, стратегией и, конечно же, манящим предвкушением крупного выигрыша. От винтажных слотов, напоминающих о золотой эре Лас-Вегаса, до инновационных игр с живыми дилерами, транслируемых в прямом эфире, – наш арсенал развлечений удовлетворит даже самого искушенного игрока. Бонусы, акции и программа лояльности становятся приятным дополнением к захватывающему игровому процессу, увеличивая ваши шансы на успех и продлевая удовольствие от игры. Зума официальный канал – это ваш компас в постоянно расширяющейся вселенной Зума Казино. Здесь вы найдете эксклюзивные анонсы, инсайдерские секреты, обзоры новых игр и полезные советы от гуру азарта. Подписывайтесь, чтобы быть в курсе самых выгодных предложений, участвовать в розыгрышах и первыми узнавать о грядущих турнирах с внушительными призовыми фондами. Мы раскроем вам тайны прибыльной игры и научим правильно распоряжаться своим банкроллом. Зума – это символ честности, прозрачности и ответственного подхода к азартным играм. Мы используем передовые технологии шифрования, чтобы обеспечить безопасность ваших данных и финансовых операций. Наша лицензия является гарантией соблюдения строгих стандартов индустрии, а квалифицированная служба поддержки всегда готова оказать помощь и ответить на любые ваши вопросы. Мы верим, что азарт должен приносить удовольствие, а не проблемы. Zooma казино – это ваш шанс испытать триумф, не покидая уютного кресла. Наша платформа оптимизирована для бесперебойной работы на любом устройстве, будь то компьютер, планшет или смартфон. Наслаждайтесь великолепной графикой, захватывающим геймплеем и мгновенными выплатами в любое время и в любом месте. Присоединяйтесь к сообществу победителей и откройте для себя Zooma казино – мир, где мечты об огромных выигрышах становятся реальностью!
official website https://berapaw.org/
use this link https://camelot.click
look at this web-site https://arch.credit/
see this site https://yieldfi.pro/
click site https://daodao.cfd
his explanation https://hlp0.online/
Get the facts https://hyperliquid-wiki.cv
article source https://hyperliquid-wiki.cv/
have a peek here https://kinetiq.buzz
learn the facts here now https://dexrp.wtf
check out the post right here https://kittenswap.buzz
read this post here https://ethereal.credit/
their website https://avalonfinance.cv
Зума офицальный канал Зума Казино – это не просто платформа для азартных игр, это целая вселенная развлечений, где адреналин смешивается с возможностью крупного выигрыша. Мы создали уникальное пространство, где каждый игрок, независимо от опыта, сможет найти что-то для себя. От классических слотов до самых современных игр с живыми дилерами – в Зума Казино собрана впечатляющая коллекция развлечений, способная удовлетворить даже самых взыскательных ценителей азарта. Зума официальный канал – это ваш проводник в мир Зума Казино. Здесь вы найдете актуальную информацию о новых играх, щедрых акциях, эксклюзивных турнирах и розыгрышах ценных призов. Подписывайтесь на наш канал, чтобы всегда быть в курсе последних событий и первыми узнавать о самых выгодных предложениях. Мы делимся стратегиями выигрышей, обзорами игр и советами от профессиональных игроков, помогая вам повысить свои шансы на успех. Зума – это синоним честности, надежности и безопасности. Мы используем самые современные технологии защиты данных, чтобы обеспечить конфиденциальность и безопасность ваших транзакций. Наша лицензия гарантирует соответствие самым высоким стандартам индустрии азартных игр, а круглосуточная служба поддержки всегда готова ответить на ваши вопросы и помочь решить любые возникшие проблемы. Zooma казино – это ваш шанс испытать удачу и сорвать крупный куш, не выходя из дома. Наша платформа адаптирована для всех устройств, будь то компьютер, смартфон или планшет. Играйте в любимые игры в любое время и в любом месте, наслаждаясь яркой графикой, захватывающим геймплеем и невероятными возможностями для выигрыша. Присоединяйтесь к Зума Казино сегодня и откройте для себя мир азарта, который превзойдет все ваши ожидания!
you can look here https://d2finance.cv/
lemon casino kod promocyjny bez depozytu
check my source https://terminal.credit/
site link https://berapaw.org
bestfindsmarket – Very convenient to shop, everything loaded fast.
here https://alchemix.center
get more https://g8keep.org/
browse around here https://ethereal.credit/
Everyday Shopping Hub – Simple interface and quick browsing made checking items easy.
For those looking for information on the topic “Step-by-Step Financial Guides for a Secure Future”, found a lot of useful stuff.
Вот, можете почитать:
https://codefortots.com
see here now https://hypperswap.cloud
my sources https://gluex.io
wikipedia reference https://berapaw.org/
Style Picks Online – Lots of fresh looks available, and the shopping flow was smooth and hassle-free.
check here https://daodao.cfd/
reference https://boros.cfd
Read Full Article https://navigator-exchange.org/
look at this now https://prjx.space
navigate to this web-site https://hypperswap.cloud
other https://d2finance.cc
that site https://g8keep.org/
check that https://snake.credit
check this link right here now https://beraborrow.cc/
website here https://unich.icu
Modern Living Finds – Enjoyed looking through the collection; lots of stylish, everyday-friendly products
Find Out More https://boros.cfd/
view it https://etherealtrade.xyz/
look at these guys https://defi-money.cc
check this link right here now https://hlp0.online
you could try these out https://alchemix.center/
click to read more https://ethereal.credit/
cheerfulhomehub – Amazing deals and easy to complete the purchase.
additional reading https://beratrax.org/
you could try this out https://d2finance.cv/
blog https://camelot.click
see this page https://hyperliquid-wiki.cc/
address https://hypperswap.space/
you could try here https://hyperliquid-wiki.cc
read the full info here https://prjx.online
my explanation https://terminal.credit/
check this site out https://defi-money.cc/
Value Hub Marketplace – Plenty of options to explore, and the browsing was seamless.
Urban style link – Found multiple fashionable items fast, layout user-friendly.
dig this https://snake.credit
go to my site https://beraborrow.cc/
my link https://theo.sbs/
эвакуатор Услуги эвакуатора включают в себя широкий спектр работ, связанных с транспортировкой транспортных средств. Это может быть эвакуация легковых автомобилей, мотоциклов, внедорожников, микроавтобусов, а также спецтехники и грузовых автомобилей. Кроме того, мы предлагаем услуги манипулятора для эвакуации автомобилей с заблокированными колесами или поврежденной ходовой частью.
look here https://kinetiq.buzz
here https://etherealtrade.lat
Проекты домов из клееного бруса Строительство дома из клееного бруса подразумевает тщательную подготовку и точное соблюдение технологических процессов. Начиная с разработки проекта, учитывающего особенности ландшафта и пожелания заказчика, и заканчивая финальной отделкой, каждый этап контролируется специалистами. Благодаря этому, дом из клееного бруса не только красив, но и обладает отличными эксплуатационными характеристиками. Дом из клееного бруса – это символ уюта и гармонии. Естественная текстура дерева, приятный аромат и ощущение тепла создают неповторимую атмосферу, в которой хочется жить и наслаждаться каждым моментом. Клееный брус позволяет реализовывать любые дизайнерские задумки, от классики до модерна, подчеркивая индивидуальность владельца.
web link https://camelot.click
find https://ethereal.credit
his explanation https://dexrp.buzz
see https://cakepad.digital
go to this web-site https://palladiumlabs.net/
try this out https://snake.credit/
visit the site https://gluex.io/
check this site out https://hyperliquid-wiki.cv/
Continue Reading https://unich.icu/
helpful resources https://beratrax.org/
BrightTrendHub – Trendy items arrived quickly, quality was great and shopping was simple.
More Bonuses https://arch.credit/
navigate to this site https://beraborrow.cc
this https://hyperliquid-wiki.cv
i loved this https://theo.exchange/
web https://alchemix.center/
Modern Home Store – Found several useful items, and the products look sturdy for regular use.
Look At This https://safeglobal.club/
эвакуатор Эвакуатор – это специализированное транспортное средство, предназначенное для погрузки, крепления и перевозки автомобилей и другой техники. Современные эвакуаторы оснащены всем необходимым оборудованием для безопасной и эффективной эвакуации даже в сложных условиях, таких как узкие улицы, ограниченное пространство или неблагоприятные погодные условия. Эвакуатор в Таганроге дешево – это не миф, а реальность! Мы предлагаем конкурентоспособные цены на все виды услуг эвакуации, сохраняя при этом высокое качество обслуживания. Обращаясь к нам, вы можете быть уверены, что не переплатите за эвакуацию и получите профессиональную помощь по доступной цене.
check out the post right here https://plasma.credit/
my review here https://d2finance.cc
additional info https://etherealtrade.xyz
web link https://kinetiq.lat
blog here https://royco.cc
Для тех, кто ищет информацию по теме “Финансовые советы для автомобилистов”, нашел много полезного.
Вот, делюсь ссылкой:
https://24leasing.ru
continue reading this https://arch.credit/
modernfashionfinds – Smooth site layout, fast loading pages, and enjoyable shopping experience.
visit here https://alchemix.center/
helpful site https://snake.credit
company website https://avalonfinance.cv
click site https://plasma.credit/
more information https://liquity.cfd
article https://avalonfinance.cc/
reference https://gluex.io
more https://berapaw.org
article source https://liquity.cfd/
pop over to this web-site https://hypperswap.space/
click here for more info https://ethereal.credit
site here https://kinetiq.lat/
see https://theo.exchange
visit the website https://usdai.cloud
Smart Daily Deals – Looked through the offers and the whole visit was smooth from start to finish.
smilehubstore – Quality items and very kind, attentive customer support.
click reference https://hyperliquid-wiki.cv
see page https://gluex.io
discover here https://etherealtrade.lat/
see page https://palladiumlabs.net
website link https://boros.cfd
have a peek at this web-site https://prjx.online
try this out https://navigator-exchange.org/
Urban style link – Found multiple fashionable items fast, layout user-friendly.
website here https://arch.credit
Recommended Site https://hyperliquid-wiki.cc/
read this article https://yieldfi.pro/
view publisher site https://hypperswap.space
modatrend – Excellent variety of fashion picks, browsing felt seamless.
get redirected here https://beraborrow.cc
additional reading https://dexrp.buzz
Homepage https://hlp0.cloud
see here now https://liquity.cfd/
directory https://hypperswap.cloud/
click reference https://hlp0.cloud/
next https://kinetiq.buzz/
ко ланта ко лант
try this out https://hypperswap.space/
you can try these out https://navigator-exchange.org
Unique Home Picks Online – Lots of interesting pieces available, and the site felt neat and well-structured.
view publisher site https://dexrp.wtf
read the article https://yieldfi.pro/
additional info https://usdai.cloud
hop over to these guys https://safeglobal.club/
that site https://ethereal.credit
see here https://gluex.io
why not try these out https://dexrp.wtf/
site https://usdai.cloud/
Source https://defi-money.cc
Зума офицальный канал Зума Казино – это не просто платформа для азартных игр, это целая вселенная развлечений, где адреналин смешивается с возможностью крупного выигрыша. Мы создали уникальное пространство, где каждый игрок, независимо от опыта, сможет найти что-то для себя. От классических слотов до самых современных игр с живыми дилерами – в Зума Казино собрана впечатляющая коллекция развлечений, способная удовлетворить даже самых взыскательных ценителей азарта. Зума официальный канал – это ваш проводник в мир Зума Казино. Здесь вы найдете актуальную информацию о новых играх, щедрых акциях, эксклюзивных турнирах и розыгрышах ценных призов. Подписывайтесь на наш канал, чтобы всегда быть в курсе последних событий и первыми узнавать о самых выгодных предложениях. Мы делимся стратегиями выигрышей, обзорами игр и советами от профессиональных игроков, помогая вам повысить свои шансы на успех. Зума – это синоним честности, надежности и безопасности. Мы используем самые современные технологии защиты данных, чтобы обеспечить конфиденциальность и безопасность ваших транзакций. Наша лицензия гарантирует соответствие самым высоким стандартам индустрии азартных игр, а круглосуточная служба поддержки всегда готова ответить на ваши вопросы и помочь решить любые возникшие проблемы. Zooma казино – это ваш шанс испытать удачу и сорвать крупный куш, не выходя из дома. Наша платформа адаптирована для всех устройств, будь то компьютер, смартфон или планшет. Играйте в любимые игры в любое время и в любом месте, наслаждаясь яркой графикой, захватывающим геймплеем и невероятными возможностями для выигрыша. Присоединяйтесь к Зума Казино сегодня и откройте для себя мир азарта, который превзойдет все ваши ожидания!
check it out https://dexrp.wtf
look at this site https://d2finance.cc/
Read Full Article https://berapaw.org/
you can find out more https://hyperliquid-wiki.cv
visit homepage https://palladiumlabs.net/
visit our website https://beratrax.org/
site here https://alchemix.center
navigate to these guys https://plasma.credit
go now https://kinetiq.buzz/
click to read https://royco.cc
our website https://hyperliquid-wiki.cv
Online Gift Market – Some creative finds caught my eye, and orders should arrive without delays.
my sources https://royco.cc/
basics https://hyperliquid-wiki.cv
visit here https://theo.sbs/
blog link https://rangerfinance.xyz
dailytrenddeals – Wide variety of discounted items, pages loaded quickly and shopping was enjoyable.
Trend Shopping Marketplace – Enjoyed shopping here, products looked amazing, delivery quick.
click this link now https://d2finance.cv
content https://defi-money.cc
take a look at the site here https://ethereal.credit
blog here https://berapaw.org
stylefinderhub – Fast delivery and great selection, loved the fashionable items.
click this link now https://liquity.cfd/
globalfashionworld – Website is clean and stylish, makes browsing the fashion items so fun.
This Site https://kinetiq.lat
look at this now https://berapaw.org
find out here https://yieldfi.pro/
browse around this web-site https://navigator-exchange.org
their website https://kinetiq.lat
web link https://yieldfi.pro
visite site https://arch.credit/
bestdailyhub – Enjoyed browsing the site, layout is clean and user-friendly always.
a fantastic read https://etherealtrade.rest/
Browse latest fashion – Found a couple of eye-catching picks fast, very user-friendly.
visit this page https://usdai.cloud/
click https://usdai.cloud
Value Collection Outlet – Several appealing products popped up, and everything seems high quality.
browse around these guys https://g8keep.org
trendhubdaily – Found stylish outfits easily, navigating the site was seamless.
Look At This https://cakepad.digital
view it now https://plasma.credit
site link https://avalonfinance.cv/
her explanation https://cakepad.digital
reference https://snake.credit
see post https://gluex.io
see https://beraborrow.cc/
why not try this out https://cakepad.digital
Global Seasonal Marketplace – Found excellent seasonal items, and the site worked smoothly for ordering.
find this https://theo.exchange/
why not try this out https://beratrax.org
Urban Outfit Picks – Discover stylish streetwear essentials for modern and trendy looks.
he has a good point https://navigator-exchange.org
see this https://hlp0.online
try this https://beraborrow.cc
More about the author https://royco.cc
read here https://arch.credit/
WildShoreMarketHub – Great variety, intuitive navigation, and items arrived quickly.
additional reading https://prjx.space/
my review here https://gluex.io
гериатрический центр Гериатрический центр фокусируется на диагностике, лечении и профилактике заболеваний, характерных для пожилого возраста. Врачи-гериатры обладают глубокими знаниями в области возрастных изменений организма и разрабатывают индивидуальные планы лечения, учитывающие особенности каждого пациента. Гериатрическая помощь включает в себя медикаментозное лечение, физиотерапию, психологическую поддержку и консультации по вопросам питания и образа жизни.
dig this https://d2finance.cv/
review https://prjx.space
check this site out https://avalonfinance.cc/
click to read https://hypperswap.space
visit the site https://avalonfinance.cv/
Find Out More https://terminal.credit/
browse around these guys https://snake.credit/
играть в казино онлайн бесплатно и без регистрации Вас интересует, где найти официальный сайт онлайн казино в России с лицензией? Мы предоставляем актуальную информацию о ведущих игровых площадках, их преимуществах и особенностях.
Web Site https://navigator-exchange.org/
Smart Home Accessories – Found several helpful products; the browsing experience felt steady and smooth.
go to my blog https://theo.sbs
my sources https://ethereal.credit/
view publisher site https://berapaw.org/
have a peek here https://kinetiq.lat/
sites https://liquity.cfd/
More Help https://navigator-exchange.org
Recommended Site https://hlp0.online/
check here https://hyperliquid-wiki.cc/
see this page https://etherealtrade.xyz/
click https://berapaw.org/
original site https://dexrp.buzz/
index https://alchemix.center/
more information https://boros.cfd
my review here https://beraborrow.cc/
article https://defi-money.cc/
try these out https://etherealtrade.xyz/
her response https://hlp0.online/
find out this here https://rangerfinance.xyz
отделение геронтологии Геронтологический центр – это не просто медицинское учреждение, это комплексный подход к поддержанию здоровья и активного долголетия пожилых людей. Здесь не только лечат болезни, связанные с возрастом, но и создают условия для полноценной жизни, наполненной общением, творчеством и заботой. Это место, где старость – не приговор, а новый этап жизни.
see this https://hypperswap.cloud/
Gift Corner Online – Nice range, and everything showed up in tidy, secure packaging.
my latest blog post https://usdai.cloud/
SunsetStemGoodsHub – Quick and reliable delivery with very convenient shopping experience.
modernstylehub – Browsing was easy and fast, found exactly what I needed.
find out here now https://cakepad.digital
check my site https://terminal.credit
Continue https://royco.cc
гериатрические больницы Помимо центров, существуют геронтологические пансионаты и дома престарелых, где пожилые люди могут получить постоянный уход и проживание. Эти учреждения обеспечивают комфортные условия и круглосуточное наблюдение.
recommended you read https://defi-money.cc/
read this post here https://etherealtrade.lat/
click here to find out more https://hlp0.cloud
read the article https://terminal.credit
Web Site https://usdai.cloud/
trendstylehub – Smooth browsing and fast checkout, really liked the selection.
Shop urban fashion – Quickly spotted a handful of stylish pieces, navigation effortless.
find this https://avalonfinance.cv/
read here https://hlp0.cloud/
trendcentral – Found stylish products today, navigating the pages was fast and easy.
go now https://kinetiq.lat/
this page https://avalonfinance.cc/
Website https://royco.cc/
visit the website https://hypperswap.space/
you can check here https://rangerfinance.xyz
try this web-site https://navigator-exchange.org
company website https://g8keep.org/
more https://unich.icu/
find more info https://daodao.cfd/
click now https://alchemix.center/
see this website https://kittenswap.buzz/
Our top selection: https://tdmclub.ru/tdm-forum/viewtopic.php?f=30&t=6305
read https://etherealtrade.xyz/
WildCrest Style Hub – Excellent assortment, simple navigation, and items arrived safely.
site here https://theo.sbs
you can look here https://g8keep.org
helpful resources https://prjx.online/
helpful site https://yieldfi.pro
check it out https://etherealtrade.xyz
click for source https://palladiumlabs.net
carefreecornerstore – Easy to navigate, products are high quality, and delivery was fast.
great site https://kinetiq.buzz
Click Here https://terminal.credit/
click to investigate https://hlp0.cloud
redirected here https://yieldfi.pro
useful source https://dexrp.wtf/
weblink https://cakepad.digital/
Trend Gift Picks Online – Trendy items everywhere, gifts were lovely, and the site worked perfectly.
from this source https://hlp0.online
his response https://snake.credit/
Today’s Most Important: https://raymondjsbhq.develop-blog.com/46212527/nppr-team-shop-your-premier-hub-for-social-media-marketing-mastery
see this page https://safeglobal.club
wikipedia reference https://d2finance.cv
check it out https://hypperswap.cloud
redirected here https://kittenswap.cc
official source https://royco.cc
nightfallmarketplace – Customer service was helpful, responded quickly, and answered all my questions clearly.
urbanedgecollective – Great selection today, found styles quickly and checkout was super easy overall.
WildCrest Picks – Nice selection, easy ordering, and fast shipping today.
read more https://etherealtrade.xyz
important link https://prjx.space/
click to read more https://hlp0.cloud/
click here to find out more https://defi-money.cc
moderntrendstore – Loved the range of choices, shopping online was fast.
he said https://theo.sbs/
IronWoodArtShop – Fast website and clear product categories made shopping easy.
check my blog https://navigator-exchange.org/
отделение геронтологии Гериатрический центр, в свою очередь, фокусируется на лечении и профилактике заболеваний, характерных для пожилого возраста. Здесь работают врачи-гериатры, специализирующиеся на особенностях здоровья пожилых людей. Гериатрический центр может быть частью геронтологического центра или функционировать независимо.
moved here https://liquity.cfd
click for source https://beratrax.org
Simple Fashion Collection – Stylish outfits available, with a seamless and fast checkout.
Browse urban outfits – A couple of standout selections were visible immediately, very convenient.
aviation game aviation game .
giftfinderhub – Excellent presents available, shipping appears reliable and smooth.
familyfashionspot – Great variety and easy ordering, browsing was enjoyable.
Daily Flourish Hub – Explore actionable tips to help you thrive in everyday life.
look at here https://plasma.credit/
BoldStreet Outfitters – Everything looked stylish and finalizing my purchase was fast and simple.
this link https://d2finance.cc/
bs2best at
Source https://palladiumlabs.net/
linked here https://theo.exchange
Discover More https://etherealtrade.xyz/
review https://daodao.cfd
more helpful hints https://usdai.cloud
you could try these out https://dexrp.wtf/
next page https://kittenswap.buzz/
content https://unich.icu/
read review https://kittenswap.buzz
i loved this https://usdai.cloud/
Smile More Picks – Loved the products, great deals, and the order arrived quickly.
WonderView Hub – Loved the collection, fast-loading website, and delivery went smoothly.
Clicking Here https://gluex.io/
more info here https://kittenswap.buzz
go to this website https://ethereal.credit/
site link https://theo.sbs
see this https://daodao.cfd
read here https://hlp0.online/
find more info https://usdai.cloud
shopcentralbig – Excellent deals and effortless checkout, very satisfied.
click here now https://d2finance.cv/
HarborTrendsHub – Great layout, easy to shop and delivery was prompt.
official source https://etherealtrade.xyz
BH Corner Finds – Loved the interface, and shipping was super fast.
Онлайн-казино Vavada активно развивается и предлагает игрокам стабильный доступ через рабочие зеркала.
Платформа отличается большим выбором игр, быстрыми выплатами и регулярными бонусными акциями.
Регистрация занимает всего несколько минут, а промокоды помогают получить дополнительные привилегии.
Игроки ценят удобный интерфейс, качественную мобильную версию и большое количество турниров.
Актуальные возможности, бонусы и обновления доступны здесь: вавада ставки на спорт.
Vavada остаётся одним из самых популярных игровых сервисов для любителей онлайн-казино.
over here https://prjx.online
Value Collection Emporium – Loved the deals, and everything loaded fast for a simple purchase.
chiczone – Found stylish items effortlessly, site navigation was simple and fast.
urbanfindshub – Excellent selection of items, ordering process was effortless.
battery aviator game apk battery aviator game apk .
https://qualifiedbuildinginspectors.co.nz/mostbet-allies-igaming-tikish-va-espor-bo-yicha-7/
Казино и БК 1win предлагает щедрые промокоды.
Акции делают игру выгоднее.
Войти можно мгновенно, после чего доступен код.
Каталог слотов пополняется провайдерами.
Смотри 1win официальный сайт промокод и активируй ваучер.
Играйте ответственно.
Soft Crest Corner – Very happy with my order, easy-to-use website, and the shopping experience was smooth.
SunCrestFashionHub – Stylish collection, intuitive navigation, and very fast shipping.
нижегородская недвижимость телеграм Нижегородская недвижимость Нижегородская область – это живописный регион с разнообразной недвижимостью. Здесь можно найти все: от городских квартир до загородных домов и участков. Рынок недвижимости Нижегородской области отличается стабильностью и привлекает как жителей региона, так и инвесторов из других областей. Благодаря развитой транспортной сети и близости к Москве, Нижегородская область становится все более популярным местом для постоянного проживания и отдыха. Рассмотрите варианты недвижимости в разных районах области: от исторических центров до тихих деревень. В Нижегородской области вы найдете недвижимость своей мечты, независимо от ваших предпочтений и бюджета. Наши специалисты помогут вам в выборе и оформлении сделки.
SoftStone Online – Lovely selection, site easy to navigate, and items came on time.
Pure Style Trends – Great selection of stylish items and effortless website navigation.
Blue Haven TrendyWear – Loved the range of choices and the shipping was right on time.
stylevaulthub – Excellent seasonal variety, checkout was seamless and quick.
Dream Big Daily – Tips and strategies to turn aspirations into actionable results.
RareSeasonDepot – Smooth ordering, reliable delivery, and excellent product quality.
опубликовано здесь https://kra42-cc.at
chiczone – Found stylish items effortlessly, site navigation was simple and fast.
узнать больше Здесь https://kra43-cc.at/
смотреть здесь https://kra43-cc.at
Shop Bright Collection – Cool collection overall, checkout was easy and my parcel came fast.
продолжить https://kra42-cc.at
BrightLeaf Market – Really enjoyed browsing here; everything loaded fast and worked perfectly.
опубликовано здесь https://kra43-cc.at
highriverdesigns – Really impressed with the design variety, website loads fast and smooth.
нажмите здесь https://kra42-cc.at/
buyingcentralhub – Smooth browsing and quick checkout, really liked the selection.
ко ланта ко лант
ссылка на сайт https://kra43-cc.at/
springlightgoods – Great shopping experience today, checkout was smooth and website runs well.
пояснения https://kra42-cc.at/
продолжить https://kra43-cc.at
DreamShopEssentials – Smooth experience, website was clear, and items arrived quickly.
khao555
aeroplane money game aviator-game-deposit.com .
aviator x http://www.aviator-game-winner.com .
качественный ремонт квартир в москве качественный ремонт квартир в москве .
выберите ресурсы kra43 at
Подробнее здесь kra43 cc
OceanCrest Shop – Stylish items, clear product photos, and delivery was prompt.
Читать далее kra43 at
пояснения kra42 cc
каталог kra43 at
Fresh Daily Hub – Good fresh product range, and the platform ran fast without issues.
кликните сюда kra42 at
It’s the best time to make some plans for the future and it is time to be
happy. I’ve read this post and if I may I wish to counsel you
few fascinating things or advice. Perhaps you can write next articles regarding this article.
I desire to learn even more issues about it!
trendvaultonline – Nice assortment of trendy items, website is fast and responsive.
blsp at
подробнее здесь kra42 at
<a href="https://sunrisetrailmarket.shop/" /SunriseTrailSelectHub – Loved the variety of items and very easy website navigation.
взгляните на сайте здесь kra43 cc
в этом разделе kra43 at
Golden Root General Store – Very user-friendly, great value, and speedy shipping.
подробнее здесь kra43 cc
glamourshop – Fashion choices are excellent, checkout process was simple.
страница kra43 cc
сюда kra43 cc
здесь kra42 at
читать kra42 at
Motivational Daily Hub – Encouragement and ideas to fuel personal growth and goal achievement.
Soft Cloud Market – Clean layout and everything is organized, making shopping pleasant.
на этом сайте маркетплейс kraken
WildSand Online – Beautiful collection, easy browsing, and very fast delivery today.
узнать kra43 cc
сюда маркетплейс kraken
Lunar Harvest Studio – The site is well-structured and browsing feels comfortable.
ссылка на сайт kra43 at
узнать kra43 at
bestfashionvalue – Fast loading pages and seamless shopping, lots of choices.
Bright Flora Finds Online – Browsing is effortless, and products are well showcased.
harbornowcollection – Clear navigation with well-presented and visually appealing items.
jahaj wala game paisa wala http://www.aviator-game-deposit.com/ .
ищу мастера по ремонту квартир москва http://www.rejting-kompanij-po-remontu-kvartir-moskvy.com .
выберите ресурсы регистрация на кракен
modernurbanhub – Great products and very reasonable prices, completely satisfied.
ссылка на сайт кракен актуальная ссылка
urbanmeadowstore – Ordered a few items, they arrived promptly and packaging was neat.
взгляните на сайте здесь кракен маркет даркнет
oceanviewemporium – Beautiful selection, items looked great and arrived promptly without issues.
trendzone – Nice selection of city fashion items, shopping was simple and fast.
проверить сайт кракен даркнет ссылка
Источник kraken onion link
FreshWind Essentials – Enjoyed the fresh selection and how straightforward it was to shop.
ca cuoc the thao online
???????????????????????????????
Creative Spark Daily – Find inspiration to start exciting projects and explore new ideas.
Modern Harbor Central – Navigation is straightforward, and items are clearly presented.
Full Circle Hub – Finding products is easy and the design feels polished.
dailyuniquefinds – Wide range of unique items, pages loaded quickly and shopping was enjoyable.
узнать больше кракен рабочая ссылка
ссылка на сайт кракен официальный сайт
321 sex chat video chat rooms
пластиковые окна рулонные шторы с электроприводом http://www.avtomaticheskie-rulonnye-shtory11.ru .
fashionvaultonline – Trendy products are amazing, browsing is smooth and hassle-free.
Смотреть здесь kraken onion link
aviator money http://aviator-game-deposit.com .
ремонт квартир москва компании rejting-kompanij-po-remontu-kvartir-moskvy.com .
buyandsave – Great offers discovered fast, browsing experience was very smooth.
Vavada casino обеспечивает рабочие зеркала.
Раздел лайв-казино представлен топ-провайдерами.
Промокоды и фриспины дают плюс к депозиту.
Вход доступен мгновенно.
Подробности по казино вавада — начинай игру.
Играйте ответственно.
бонуси казино казино з бонусами
Wind Emporium Bright – Website worked smoothly, and the shipping speed was great.
25 роз Доставка цветов: Доставка цветов – это современный и удобный сервис, позволяющий отправить букет в любую точку города или даже страны. Благодаря услугам доставки, можно поздравить близких с праздником, выразить свои чувства или просто сделать приятный сюрприз, не выходя из дома. Доставка цветов – это отличный способ сэкономить время и силы, а также гарантировать, что ваш подарок будет доставлен вовремя и в идеальном состоянии.
Timber Grove Boutique – Products are easy to explore, and the interface is user-friendly.
happypickdeals – Wide selection and simple checkout, browsing was enjoyable.
fashionexpresshub – The items are stylish, and shopping was very straightforward.
в этом разделе kraken tor
пляжи ко ланты размеры
Harbor Studio Essentials – Smooth browsing experience with a calming aesthetic.
этот сайт кракен даркнет вход
леса повышенной безопасности Трубчатые леса аренда: Аренда трубчатых лесов – это популярное решение для строительных и ремонтных работ, предлагающее прочность, надежность и гибкость в адаптации к различным формам зданий. Легкость монтажа и демонтажа, а также возможность регулировки высоты и конфигурации, делают трубчатые леса идеальным выбором для фасадных работ, кладки кирпича и других задач на высоте. Аренда позволяет экономить на покупке и хранении оборудования, предоставляя доступ к качественным лесам с учетом конкретных потребностей проекта.
рулонные жалюзи купить в москве рулонные жалюзи купить в москве .
fashionpulse – Nice trendy selection, navigating the website was smooth.
узнать больше Здесь рабочие кракен зеркала
здесь актуальные кракен ссылки
содержание что такое кракен даркнет
опубликовано здесь kraken onion ссылка
Сайт казино Vavada обеспечивает стабильный доступ к играм.
Игровые автоматы и слоты доступны круглосуточно, что делает процесс комфортным.
Создать аккаунт просто, и пользователи получают полный функционал.
Чтобы найти рабочий вход и актуальное зеркало, переходите по vavada online casino — там представлены проверенные адреса.
Соблюдайте баланс, чтобы игра оставалась под контролем.
подробнее kra42 at
ссылка на сайт кракен тор ссылка
узнать кракен официальный сайт
ко ланта аэропорт
Silver Moon Collection – Fantastic range of items, website works well, and very happy with shipping.
Смотреть здесь водка бэт
узнать vodkabet прямо сейчас
Следующая страница casino vodka
узнать больше водкабет
опубликовано здесь casino vodka
посетить веб-сайт водкабет
Продолжение водка бэт
Подробнее vodkabet прямо сейчас
нажмите водка бэт
нажмите здесь водка бэт
Читать далее vodkabet новый сайт
balancezone – Easy to move between categories, products were easy to explore.
проверить сайт vodkabet водкабет казино
здесь kraken onion ссылка
Подробнее здесь водкабет
подробнее кракен тор
можно проверить ЗДЕСЬ casino vodka
узнать vodka bet
узнать больше vodka bet
Узнать больше водкабет
Продолжение казино водка
Modern Ridge Choice – Products are easy to locate, and the layout is simple and clear.
honestgrovegoods – The product display looks clean and appealing, really liked exploring today.
здесь кракен актуальная ссылка
truewoodsupply – Found interesting products here, everything was quick to load and explore.
этот контент vodkabet онлайн казино
Channels of medium-sized sizes typically list a
few thousand to a few thousand makers. For general video leakage, they might have separate sections
for fotos porno xxx OnlyFans, for other license platforms, and for other platforms.
They eventually build a fairly extensive catalogue,
specifically for creators who are currently popular on social media or in some nations. http://lificonsultores.com/?wptouch_switch=desktop&redirect=https%3A%2F%2Fes.she-international.com%2F
каталог водка бет регистрация
читать водка казино
Узнать больше vodkabet водкабет казино
зайти на сайт водкабет
Читать далее kra43 at
этот сайт vodkabet водкабет казино
trendhubstore – Found the latest trendy items quickly, delivery was fast and dependable.
этот контент водка бэт
интернет казино водка
bestdealcorner – Pleasant experience, pages loaded quickly and items were easy to find.
ссылка на сайт vodkabet онлайн казино
узнать больше Здесь водкабет
посмотреть в этом разделе vodkabet прямо сейчас
сайт водка бэт
этот контент kraken onion ссылка
перейдите на этот сайт kraken onion ссылка
на этом сайте vodkabet водкабет казино
узнать больше vodkabet прямо сейчас
опубликовано здесь водка казино
сюда водка бет
другие водкабет
перенаправляется сюда водка бет
Перейти на сайт casino vodka
Подробнее кракен актуальная ссылка
читать vodkabet новый сайт
смотреть здесь kra42 at
веб-сайт vodkabet водкабет казино
узнать больше vodkabet водкабет казино
?????????
Mindful Progress Spot – Explore strategies to stay focused and achieve meaningful growth.
нажмите vodkabet прямо сейчас
пояснения vodkabet прямо сейчас
Главная кракен маркет даркнет
нажмите, чтобы подробнее vodkabet онлайн казино
другие vodkabet новый сайт
Timberwood Select Picks – Items are easy to explore and the interface is very user-friendly.
проверить сайт кракен официальный сайт
проверить сайт vodka bet
khao555
рулонные шторы на окно в кухне http://www.avtomaticheskie-rulonnye-shtory11.ru/ .
Продолжение vodkabet новый сайт
читать casino vodka
в этом разделе водка бэт
посетить веб-сайт vodkabet онлайн казино
этот контент кракен сайт
каталог vodkabet прямо сейчас
кликните сюда маркетплейс kraken
взгляните на сайте здесь казино водка
metatrader 5 mac https://www.metatrader-5-downloads.com .
веб-сайте vodkabet новый сайт
metatrader 5 metatrader 5 .
страница vodkabet водкабет казино
посмотреть на этом сайте vodkabet онлайн казино
посмотреть на этом сайте водка бет
Узнать больше vodkabet новый сайт
Bright Meadow Value Shop – Glad to see the items arrive exactly as listed; the site was very simple to use.
нажмите водкабет
узнать больше Юридическая консультация по разводам
узнать vodkabet онлайн казино
выберите ресурсы водка бет
можно проверить ЗДЕСЬ casino vodka
Смотреть здесь vodkabet водкабет казино
Подробнее vodkabet новый сайт
нажмите здесь vodkabet водкабет казино
узнать vodkabet онлайн казино
узнать больше vodkabet водкабет казино
смотреть здесь водка бет
Aurora Finds Online – Shopping is hassle-free and visually pleasant.
Подробнее здесь vodkabet онлайн казино
на этом сайте vodkabet водкабет казино
узнать больше vodkabet онлайн казино
нажмите здесь водкабет
trendfinderhub – Loved the site, navigation is easy and items are affordable.
stylezone – Site is well-structured, making it easy to discover products.
зайти на сайт водка бет
интернет vodkabet водкабет казино
этот контент водка бэт
посмотреть в этом разделе vodkabet онлайн казино
выберите ресурсы водка казино
Следующая страница водкабет
другие vodkabet онлайн казино
опубликовано здесь vodkabet прямо сейчас
подробнее водка бэт
такой водка бэт
toptrendworld – Fast loading pages and intuitive layout made shopping enjoyable.
интернет водка бет
Продолжение водка бэт
опубликовано здесь водка бэт
перейдите на этот сайт водка бэт
Подробнее здесь vodkabet новый сайт
trendcenter – Great selection of clothing and accessories, delivery was fast and reliable.
сайт водкабет
на этом сайте водка бет
проверить сайт kra42 cc
нажмите здесь казино водка
сайт vodkabet новый сайт
подробнее vodkabet онлайн казино
сайт водкабет
подробнее vodkabet онлайн казино
Следующая страница vodka bet
узнать vodkabet онлайн казино
нажмите vodkabet новый сайт
подробнее vodkabet водкабет казино
интернет vodkabet онлайн казино
Подробнее здесь vodkabet прямо сейчас
интернет vodkabet онлайн казино
mediafusion – Loved the layout and design — made exploring items enjoyable and straightforward.
learnshareachieve – Pleasant product photos and simple design made exploring items very easy today.
нажмите kraken marketplace
Смотреть здесь водка бэт
посетить веб-сайт водка казино
сюда vodkabet новый сайт
посетить веб-сайт водкабет
LLC COMMERCIAL & TRANSPORT COMPANY “SHARP STING” / DUNS 758094686 Одним из ключевых преимуществ “Острого Жала” является наличие развитой сети складских комплексов, расположенных в стратегически важных регионах страны. Это позволяет нам оперативно реагировать на запросы клиентов и оптимизировать маршруты доставки, сокращая сроки и издержки. Мы предлагаем услуги ответственного хранения, кросс-докинга, а также обработку и упаковку грузов в соответствии с требованиями заказчика.
читать vodkabet новый сайт
этот контент водка бэт
OriginPeak Select Boutique – Loved the trendy items, easy website experience, and the package arrived on time.
веб-сайте bs2web at
содержание vodkabet новый сайт
продолжить водка бет регистрация
посетить веб-сайт vodkabet новый сайт
перенаправляется сюда bs2best at
Whispering Trend Market – Items are easy to locate and exploring feels intuitive.
download mt5 for mac http://www.metatrader-5-downloads.com/ .
metatrader5 metatrader5 .
Open Plains Market – Shopping is convenient, and the interface is smooth and organized.
moderntrendshop – Stylish items arrived quickly, loved the experience.
Продолжение kraken ссылка
взгляните на сайте здесь kra41 cc
здесь bs2site at
зайти на сайт kraken market
выберите ресурсы kraken ссылка
freshpick – Products are well organized, and the interface is intuitive.
trendfindshub – Excellent selection of items, ordering process was effortless.
dealhub – Found some excellent deals fast, browsing the site was simple and smooth.
пояснения bs2site at
взгляните на сайте здесь bs2site at
узнать больше Здесь kraken ссылка
веб-сайте kraken marketplace
веб-сайт kraken ссылка
нажмите, чтобы подробнее kraken marketplace
Hochwertige Uhrenreplika
mostbet pl
Kasyno Mostbet — krótka prezentacja
Mostbet operuje w oparciu o licencję Curacao i zapewnia bibliotekę liczącą ponad 3000 gier oraz możliwość obstawiania sportu. Nowi gracze otrzymują 150% bonusu do 1400 zł, a wpłata startowa zaczyna się od 25 zł. Można korzystać z BLIK, kart bankowych, e-portfeli i kryptowalut. Wsparcie techniczne działa przez całą dobę w języku polskim.
Jak założyć konto w Mostbet
Otworzenie konta wymaga około 1,5–2 minut. W procesie rejestracji wpisuje się:
numer telefonu
e-mail
ustawione hasło
wybraną walutę konta (PLN)
Na telefon przychodzi SMS z kodem, a na e-mail link do aktywacji konta. Po ich akceptacji profil zostaje aktywowany. Rejestracja może zostać wykonana także przez Facebook albo Google, co skraca czas rejestracji.
Dostęp do konta
Wejście do konta wymaga podania e-maila lub telefonu oraz hasła. Dostępna jest opcja funkcji zapamiętywania danych dla ułatwienia logowania na urządzeniach zaufanych.
Przywracanie dostępu i zabezpieczenia
Jeśli hasło zostanie zgubione, można je odnowić korzystając z funkcji „Przywróć hasło” – link do zmiany wysyłany jest na e-mail.
Mostbet używa weryfikacji dwuskładnikowej (2FA) przez SMS lub Google Authenticator, co chroni konto i depozyt przed nieautoryzowanym dostępem.
проверить сайт blacksprut
Soft Blossom Style Hub – Beautiful collection, smooth navigation, and very quick ordering experience.
Подробнее здесь kra39 at
посмотреть на этом сайте bs2best at
сайт bs2site at
Trendy Styles Hub – Discover the latest fashion trends and update your wardrobe effortlessly.
другие bs2web at
Перейти на сайт kra38 cc
Coastline Deals – Navigation is straightforward and the design is calming.
узнать kraken market
shoptodaysdeals – Loved browsing the daily specials, shipping was quick.
film production services in Cortina d’Ampezzo
Sunwave Essentials Corner Picks – Products are easy to locate and navigation is simple.
mt5 download http://metatrader-5-downloads.com .
metatrader 5 mac metatrader 5 mac .
Казино Vavada популярно среди игроков Азербайджана благодаря стабильному зеркалу и щедрой бонусной программе.
Регистрация занимает считаные минуты, после чего доступны фриспины, кэшбэк и регулярные турниры.
Обновляемые промокоды позволяют начать игру без депозита и получать дополнительные награды.
Служба поддержки отвечает на азербайджанском и английском языках, а выплаты обрабатываются оперативно.
Подключиться к актуальной версии сайта можно по ссылке: https://vavada.instagram-az.info/.
Vavada остаётся надёжной площадкой для любителей онлайн-казино и ставок на спорт.
Следующая страница blacksprut
сайт bs2web at
Узнать больше blacksprut
homefinds – Loved the variety of home products, navigating was easy and fast.
можно проверить ЗДЕСЬ kraken marketplace
Перейти на сайт blsp at
fashionfindshub – Fast and simple shopping experience, pages loaded quickly.
в этом разделе kraken ссылка
ссылка на сайт blacksprut
перейти на сайт blsp at
modernstylecorner – Fast loading and clear presentation — made selecting products easy and hassle-free.
Перейти на сайт kraken ссылка
glamfashion – Everything is well organized, making shopping stress-free.
modernshoppingcorner – Browsing felt smooth and easy, items are well organized with clear photos.
купить худи Мир моды с восторгом принял философию свободы и самовыражения, воплощенную в силуэтах оверсайз. Одежда оверсайз, отрицая сковывающие рамки традиционного кроя, дарит ощущение невесомости и легкости. Она деликатно скрывает несовершенства фигуры, позволяя каждой женщине почувствовать себя уверенно и комфортно. Женская одежда стремится выделить индивидуальность, ищете ли вы где купить худи или купить свитшот, нужно ориентировать на модные тренды и стиль, а узнать их можно в модном журнале, где представлен стильный бренд одежды. Мода 2026 – это время экспериментов!
другие bs2web at
проверить сайт kraken marketplace
Смотреть здесь blacksprut
как украсить елку 2026 Новый Год – это не только подарки, но и атмосфера праздника. Как украсить елку? Этот вопрос волнует многих в преддверии Нового Года. В 2026 году нас ждут новые тренды и стили в украшении елок. Отдайте предпочтение натуральным материалам, минимализму и экологичности. Используйте элементы, сделанные своими руками, чтобы создать уникальную и неповторимую атмосферу в доме.
на этом сайте kraken marketplace
Читать далее kraken market
сюда kra41 cc
https://geltaxi.ru/taxi-veselovka-sochi-aeroport
Noble Ridge Wardrobe – Excellent designs, user-friendly site, and my package arrived safely.
??????????
интернет blsp at
списание долгов по кредитам физических лиц Прежде чем инициировать процедуру, крайне важно получить всестороннюю информацию о её аспектах. Бесплатная консультация по банкротству или бесплатная консультация юриста по банкротству станет первым шагом к пониманию перспектив и потенциальных последствий. Важно выяснить, как происходит списание долгов по кредитам и какие долги списывают через банкротство, поскольку не все обязательства подлежат аннулированию. Квалифицированная консультация по банкротству физических лиц поможет сориентироваться в юридических тонкостях и разработать оптимальную стратегию. Онлайн консультация по банкротству – удобный формат для получения первичной информации. Решение о банкротстве сопряжено с рядом последствий, поэтому необходимо тщательно взвесить все плюсы процедуры банкротства физического лица. К ним относится возможность списать долг по кредиту банкротство и начать жизнь с чистого листа. Однако, следует учитывать, что проведение процедуры банкротства – это ответственный шаг, требующий соблюдения строгих правил и участия квалифицированных специалистов. Особое внимание следует уделить вопросам: процедура банкротства сроки проведения, процедура банкротства физических лиц по кредитам, процедура банкротства физического лица в суде, процедура банкротства физического лица пошаговая инструкция.
onyx555
Kind Groove Picks – The store feels intuitive and shopping is hassle-free.
Как составлен рейтинг дающих деньги казино 2023 На нашем сайте есть перечень игровых сайтов, которые предоставляют бонусы для новых пользователей. При составлении рейтинга учитывались такие моменты: Вид бонуса: бездепозитный, за пополнение счета, фриспины. Размер вейджера. В списке можно найти казино с минимальным коэффициентом: х20, х25. Сумма бонуса. Условия отыгрыша. Срок действия предложения: бессрочно или ограниченное время. Есть ли лимиты по сумме ставки и количеству задействованных слотов. Большинство казино на нашем сайте — надежные площадки с лицензией в сфере азартных развлечений. Но всегда стоит придерживаться принципов ответственной игры и вносить на счет ту сумму, которую не жалко потерять.
Пополнение и вывод заработанных средств Пополнить игровой счет можно любым доступным методом на сайте плей фортуна, на данный момент количество вариантов внесения депозита – чуть более 50. Но этот показатель со временем может изменяться, как в одну так и в другую сторону. Наиболее популярными из них есть платёжные банковские карты, электронные кошельки, мобильные платежи, платежные системы, интернет-банкинг и криптовалюты. Вывод – аналогично пополнению, все транзакции проводятся без комиссий со стороны букмекера. Пополнение игрового счета производится моментально, вывод в некоторых случаях занимает до 15 минут времени. Важно! Снять выигрыш можно в большинстве случаев только тем способом, через который вносились средства на счет. При этом все поля в личном кабинете должны быть заполнены, рекомендуем это сделать заранее, до вопроса от службы безопасности. В таком случае идентификацию вы пройдете автоматически, если пропустите этот пункт, и поступит запрос от безопасности сайта ПлейФортуна, эту процедуру будете проходить в ручном режиме.
Also visit my website https://higgledy-piggledy.xyz/index.php/User:LucaSmith0117
Achieve Your Goals – Motivational tips to keep you on track and confident in achieving success.
в этом разделе blacksprut
Женская одежда Костюмы спортивные – синоним комфорта и функциональности, объединяющие стиль и практичность. Они обеспечивают свободу движений и идеально подходят для тренировок, прогулок на свежем воздухе или в качестве расслабленной повседневной одежды. Выбирая спортивный костюм, обратите внимание на качество материала и посадку, чтобы обеспечить максимальный комфорт и уверенность в себе. С приближением холодных месяцев особую актуальность приобретают утепленные варианты. Худи с начесом – это нежная забота о вашем теле в морозные дни. Обволакивающий комфорт в сочетании со стильным дизайном делает их незаменимым элементом осенне-зимнего гардероба. А для тех, кто ценит функциональность и возможность трансформации образа, худи зип станет отличным выбором. Молния позволяет регулировать теплообмен и создавать различные стильные комбинации.
прогнозы на футбол Выбор надежной букмекерской конторы – это фундамент успешного беттинга. Букмекерские конторы различаются по коэффициентам, линии, наличию бонусов и промоакций, удобству интерфейса и надежности выплат. Перед тем, как сделать ставку, необходимо тщательно изучить репутацию букмекерской конторы, ознакомиться с отзывами пользователей и убедиться в наличии лицензии. Для принятия обоснованных решений в ставках на спорт необходимо обладать актуальной информацией и аналитическими данными. Прогнозы на баскетбол, прогнозы на футбол и прогнозы на хоккей – это ценный инструмент, позволяющий оценить вероятности различных исходов и принять взвешенное решение. Однако, стоит помнить, что прогнозы – это всего лишь вероятностные оценки, и они не гарантируют стопроцентный результат.
mt5 download for pc http://www.metatrader-5-downloads.com/ .
автоматические рулонные шторы на окна автоматические рулонные шторы на окна .
metatrader 5 metatrader 5 .
BlueGrain Hub Online – Quickly spotted great items and navigating the site was easy.
freshgiftchoice – Smooth site navigation and easy ordering, really liked the options.
как происходит списание долгов по кредитам В непростых финансовых обстоятельствах, когда бремя долгов становится непосильным, процедура банкротства физических лиц может стать спасительным кругом. Однако, прежде чем решиться на этот шаг, необходимо тщательно изучить все аспекты и нюансы, связанные с данной процедурой. Важным вопросом является определение сроков процедуры банкротства физических лиц, которые могут варьироваться в зависимости от сложности дела и загруженности судебной системы.
glamhubzone – Simple navigation and the products are easy to explore.
KindleWood Select – User-friendly site, excellent deals, and everything shipped without delay.
Dream Harbor Finds – The site loads fast and shopping feels smooth.
списать долги банкротство физ лиц Процедура банкротства имеет свои плюсы процедуры банкротства физического лица, такие как избавление от долгов и прекращение начисления процентов и штрафов. Однако, важно понимать, что проведение процедуры банкротства – это сложный процесс, требующий юридической грамотности и опыта. Проведение процедуры банкротства должника должно осуществляться под контролем квалифицированного юриста. Необходимо четко понимать процедура банкротства сроки проведения, чтобы быть готовым к длительному процессу. Процедура банкротства физических лиц по кредитам имеет свои особенности, которые необходимо учитывать. Процедура банкротства физического лица в суде требует подготовки документов и участия в судебных заседаниях. Процедура банкротства физического лица пошаговая инструкция поможет сориентироваться в этапах процедуры. Процедура банкротства физического лица через суд – основной способ проведения процедуры. Процедуры банкротства должника физического лица регулируются законодательством о банкротстве.
Продолжение bs2web at
Hello!
Tele-urology makes specialist access easy—virtual urology consult for follow-ups, prescriptions, or minor concerns. Same-day urology appointment and walk-in urology clinic options available for urgency. Emergency urology care covers stones, retention, and infections. Online appointment scheduling and urology patient portal streamline your experience. Quality care, wherever you are.
More details on the website — https://ciopucise.shop
allopurinol for uric acid stones, microbiome and UTI, low testosterone
urology-oncology partnership, patient voice urology, urology patient portal
Good luck and good health!!
онлайн консультация по банкротству На начальном этапе целесообразно получить бесплатную консультацию по банкротству, чтобы оценить свои шансы на успех и получить ответы на интересующие вопросы. Бесплатная консультация юриста по банкротству поможет разобраться в законодательных тонкостях и определить оптимальную стратегию действий. Понимание того, как происходит списание долгов по кредитам в рамках процедуры банкротства, является ключевым моментом. Важно знать, какие долги списывают через банкротство, чтобы четко представлять конечный результат. Квалифицированная консультация по банкротству и консультация по банкротству физических лиц позволит получить полную информацию о процедуре и ее последствиях. Онлайн консультация по банкротству – удобный способ получить ответы на вопросы, не выходя из дома.
meta trader 5 download http://www.metatrader-5-downloads.com .
рулонные электрошторы http://avtomaticheskie-rulonnye-shtory11.ru/ .
download metatrader 5 download metatrader 5 .
favstorehub – Easily found favorite products, browsing and checkout were quick.
продолжить bs2web at
Wild Horizon Online – Trendy products, simple layout, and my purchase completed perfectly.
purechoicehub – Shopping felt comfortable, site runs smoothly and display is user-friendly today.
shopcentral – Easy navigation, items are clearly displayed and accessible.
ссылка на сайт kraken зайти
нажмите, чтобы подробнее https://kra46att.at/
Bridgetown Boutique Online – Shopping is effortless, and the site feels professional.
веб-сайте https://kra46att.at/
Смотреть здесь https://kra46att.at/
bs2best at что за сайт
нажмите здесь https://kra46att.at
можно проверить ЗДЕСЬ https://kra46att.at/
Milan-based film production company High-end production company in Milan Italy: Catering to luxury brands and discerning clients, delivering sophisticated and visually stunning content.
https://www.soft4led.com/why-jimmy-kimmel-is-the-man-of-the-youtube-era/
пояснения https://kra46att.at/
ссылка на сайт https://kra46att.at/
узнать больше https://kra46att.at/
посетить веб-сайт https://kra46att.at
смотреть здесь https://kra46att.at/
trendybargains – Great deals, the whole shopping process felt effortless.
электропривод рулонных штор http://avtomaticheskie-rulonnye-shtory11.ru .
metatrader5 download metatrader-5-downloads.com .
узнать больше Здесь кракен клир
mt5 mac http://www.metatrader-5-mac.com .
Продолжение кракен сайт
на этом сайте kraken market
подробнее https://kra46att.at/
можно проверить ЗДЕСЬ https://kra45cc.at/
Grand Style Market – Everything loads fast and the site feels welcoming.
подробнее здесь https://kra46att.at
пояснения https://kra45cc.at/
ссылка на сайт https://kra45cc.at/
staycentral – Well-structured layout, products easy to explore, and navigation feels seamless.
нажмите https://kra45cc.at/
Смотреть здесь https://kra46att.at
посмотреть на этом сайте https://kra46att.at
страница https://kra46att.at
Hacklink tool child porn tube sites https://muza.store click to e child porner.
????
интернет https://kra45cc.at
сайт https://kra46att.at
нажмите, чтобы подробнее https://kra46att.at/
страница https://kra46att.at/
этот сайт https://kra46att.at
ссылка на сайт https://kra46att.at/
https://marketgit.com/how-jennifer-lopezs-green-dress-changed-the-internet/
Узнать больше https://kra46att.at/
сюда https://kra45cc.at/
Market Trend Picks – Handpicked stylish items for a smooth and hassle-free shopping experience.
веб-сайт https://kra46att.at
shopthelatestdeals – Easy browsing and well-presented items make this store worth checking out.
Future Groove Online – Items load fast, and navigation is smooth and easy.
shopandsmiletoday – Shopping here felt natural and quick thanks to clear categories and good layout.
Morning Rust Studio – Quick to find products and browsing is effortless.
https://cvetovodstvo.su/top-5-smesey-semyan-gazona-dlya-sportivnyh-i-detskih-ploschadok/
stayworld – Fast-loading pages, products are well displayed, and browsing felt comfortable.
https://podarki-moscow.ru/
уксусная кислота оптом Сотрудничество с РТХ – это гарантия стабильного и успешного развития вашего бизнеса в динамичном мире современной промышленности
Booking your domestic windows cleaning and other services in Dublin is simple on our website. For commercial or tailored cleaning needs, just contact us. Trust Eco Cleaning Company Dublin for dedicated, expert windows cleaning and exterior home maintenance: https://ecocleaningcompany.ie/
https://vseokrovle.com/besedka/2115-chem-otlichayutsya-odnoletnie-i-mnogoletnie-travy-dlya-gazona.html
Urban Peak Picks Online – Everything loads fast and exploring items is simple.
Wardrobe & Lifestyle Picks – Practical and trendy selections to enhance your personal style.
Узнать больше https://kra48a.at/
узнать больше https://kra48a.at
believeandachieve – Found interesting items quickly, overall user experience felt smooth and neat.
EverPath Shop – Navigation is smooth and discovering products feels effortless.
shopwithjoy – The site feels inviting and pleasant, browsing was smooth and easy today.
подробнее водка казино официальный сайт
motivatedselectionhub – Pages load fast, navigation is simple, and exploring products was enjoyable.
прогнозы на футбол Ставки на спорт – это азартное развлечение, требующее аналитического подхода и понимания стратегий. Современный мир беттинга предлагает широчайший выбор возможностей: от классических видов спорта до киберспорта и экзотических дисциплин. Однако, важно помнить, что успех в ставках на спорт – это не только удача, но и результат кропотливого анализа, изучения статистики и учета множества факторов.
Продолжение https://kra48a.at
нажмите, чтобы подробнее https://kra48a.at
?Brindiamo per ogni inseguitore del trionfo !
y accesible. Explorar opciones como
ВїVale la pena tiradasgratissindeposito.es? AnГЎlisis claro y sencillo – п»їhttps://tiradasgratissindeposito.es/
?Che la fortuna ti sorrida con che tu viva superbi incassi fenomenali !
проверить сайт https://kra48a.at
Подробнее водка казино
читать https://kra48a.at
Dawncrest Market – Products are easy to locate, and the interface is user-friendly.
нажмите здесь водка бет
интернет vodka bet
перенаправляется сюда kraken маркетплейс
на этом сайте кракен 2025
смотреть здесь Кракин
пояснения кракен актуальная ссылка на сегодня
перейти на сайт кракен 2025
продолжить кракен актуальная ссылка
страница кракен вход
проверить сайт водка бет казино
интернет кракен зеркало
зайти на сайт кракен маркет
посетить сайт Kra43.cc
Девушки по вызову Девочки по вызову: Под “девочками” скрываются уверенные в себе, образованные женщины, которые ценят свою независимость и свободу выбора. Они предлагают не просто физическую близость, а эмоциональную поддержку и интересное общение.
пояснения сайт кракена
нажмите здесь Кракин
азотная кислота оптом РТХ: широкий спектр химической продукции для различных отраслей промышленности, от базовых химикатов до специализированных реагентов
Продолжение kraken маркетплейс
сайт водка бет казино
в этом разделе kraken
ASIC Mining for WindowsCGMiner for Windows has been trusted by professional miners since 2011. It delivers multi-pool mining features, real-time hardware monitoring, remote management capabilities, and no extra charges, positioning it as one of the most dependable mining solutions.
Download the CGMiner software
See the full Review >
Why Select CGMiner?
CGMiner remains the most widely trusted free Windows mining software, combining professional-level functionality with reliable operational stability and transparent development.
Multi-Pool Support
Link to several mining pools at the same time. The built-in failover logic transitions between pools to ensure uninterrupted performance.
Real-Time Hardware Tracking
CGMiner provides real-time monitoring of thermal conditions, ventilation speeds, and current hashrate. This helps miners maintain optimal hardware conditions and prevent excessive heat buildup.
Remote Management
Users can operate their mining setups remotely via the built-in API. This makes CGMiner suitable for both small setups and large-scale mining operations.
Transparent Open-Source Code
Its codebase is fully open to the public with no undisclosed fees, no embedded malware, and complete code transparency.
0% Fees
The miner receives the full payout. CGMiner does not charge developer commissions.
GPU and ASIC Support
Version 3.7.2 is compatible with all major GPUs and a broad selection of ASIC hardware, ensuring extensive hardware support.
CGMiner in Numbers
Over 14 years of ongoing development
Zero developer fees
Compatibility with more than 50 ASIC devices
A global user base of more than 100,000 miners
Ready to Begin Mining?
Get CGMiner and become part of a global mining community.
Access Free Setup
Home
Review
Windows Mining
Free Software
ASIC Guide
скачать игры по прямой ссылке Скачать игры по прямой ссылке: Скорость и удобство в каждом скачивании. Прямые ссылки – это ваш персональный путь к быстрому и безопасному скачиванию любимых игр. Никаких торрентов, никаких программ-посредников – только чистые файлы, готовые к установке. Насладитесь высокой скоростью загрузки и моментальным доступом к играм, о которых вы мечтали. Это выбор тех, кто ценит комфорт и стремится к бесперебойному игровому опыту.
здесь Кракин
https://cvetovodstvo.su/top-5-smesey-semyan-gazona-dlya-sportivnyh-i-detskih-ploschadok/
Lunar Wave Hub – Shopping feels natural and finding products is quick.
bs2site at
можно проверить ЗДЕСЬ кракен ссылка
здесь водка казино официальный сайт
выберите ресурсы kraken com
зайти на сайт Перейти на сайт kraken
ссылка на сайт кракен ссылка
??????????????????????????????????
на этом сайте Кракин
опубликовано здесь кракен это
Смотреть здесь kraken com
в этом разделе Кракин
каталог водка бет казино
Читать далее кракен магазин
выберите ресурсы кракен вход
urbancentralhub – Browsing was intuitive, and products are organized well.
Узнать больше kra43.at
продолжить кракен шоп
проверить сайт кракен шоп
можно проверить ЗДЕСЬ kraken
посетить сайт кракен шоп
посмотреть в этом разделе https://kra48a.at/
подробнее здесь кракен шоп
узнать больше Здесь кракен сайт магазин
Starlit Style Hub – Items load quickly, and navigating the store is enjoyable.
Узнать больше кракен актуальная ссылка на сегодня
нажмите здесь кракен ссылка
Перейти на сайт kraken даркнет рынок
опубликовано здесь кракен маркетплейс
пояснения Кракин
этот контент кракен ссылка
посетить сайт kraken даркнет рынок
Перейти на сайт кракен актуальная ссылка
проверить сайт казино водка
такой кракен шоп
проверить сайт кракен маркет
нажмите, чтобы подробнее кракен актуальная ссылка
нажмите, чтобы подробнее водка бет казино
посетить веб-сайт кракен шоп
ссылка на сайт https://kra48a.at/
содержание кракен 2025
перейдите на этот сайт кракен маркетплейс
Подробнее https://kra48a.at/
смета на ремонт после залива смета на ремонт после залива .
филлер купить филлер купить .
в этом разделе Kra43.cc
узнать казино водка
Перейти на сайт Kra43.cc
смотреть здесь казино водка
курсовой проект купить цена http://www.kupit-kursovuyu-8.ru .
купить курсовую работу купить курсовую работу .
посмотреть на этом сайте кракен официальный сайт
Источник кракен 2025
узнать kra43.at
такой кракен актуальная ссылка на сегодня
пояснения Kra43.cc
сайт кракен вход
на этом сайте kraken даркнет рынок
узнать выпускайте кракена
можно проверить ЗДЕСЬ kra43.at
Best Budget Buys – Discover quality products at prices that are easy on your wallet.
посмотреть на этом сайте kraken даркнет рынок
узнать больше кракен вход
посетить веб-сайт kraken маркетплейс
содержание kraken маркетплейс
в этом разделе кракен ссылка
зайти на сайт Перейти на сайт kraken
найти это кракен 2025
другие кракен актуальная ссылка
пояснения https://kra48a.at/
другие кракен зеркало
девушки по вызову спб Девушки по вызову: Эскорт – это прежде всего искусство создания уникального опыта, где красота и интеллект переплетаются, чтобы удовлетворить самые изысканные запросы. Это мир, где галантность и безупречные манеры ценятся превыше всего, а конфиденциальность – неприкосновенна.
читать kraken
зайти на сайт кракен вход
Timberline Select – Items are easy to find and browsing feels comfortable.
посетить веб-сайт кракен это
скачать игры с яндекс диска Скачать игры по прямой ссылке: Насладитесь скоростью и удобством прямого скачивания. Прямые ссылки – это кратчайший путь к вашим любимым играм. Никаких дополнительных программ, только чистый файл, готовый к установке. Высокая скорость загрузки и мгновенный доступ к игровым шедеврам – выбор настоящих геймеров, ценящих комфорт. Почувствуйте разницу!
посмотреть на этом сайте кракен переходник
пояснения кракен актуальная ссылка на сегодня
посмотреть на этом сайте Перейти на сайт kraken
сюда кракен ссылка
стеариновая кислота купить оптом Индивидуальный подход к каждому клиенту: эксперты РТХ подберут оптимальные решения, соответствующие вашим уникальным потребностям и спецификациям производства
пояснения кракен шоп
узнать больше кракен переходник
Подробнее здесь кракен зеркало
Девочки по вызову Девочки по вызову СПб: В Санкт-Петербурге, городе высокого искусства, эскорт-услуги – это про эстетику и изысканность. Наши девушки обладают безупречным вкусом, чувством стиля и умением создавать атмосферу уюта и роскоши.
wearhub – Browsing was smooth, and all products were easy to find.
Узнать больше kra43.at
этот сайт водка казино официальный сайт
FutureGardenCorner – Intuitive navigation and neat layout made the shopping experience enjoyable.
веб-сайт кракен шоп
Подробнее здесь kraken com
bestchoiceoutlet – Always nice product photos here, browsing felt comfortable and reliable.
скачать игры по прямой ссылке Безопасность превыше всего: Помните, что скачивая игры из непроверенных источников, вы рискуете безопасностью своего устройства. Всегда проверяйте репутацию сайта и скачивайте файлы только с надежных ресурсов. Антивирус – ваш верный помощник.
перейти на сайт кракен актуальная ссылка
перейдите на этот сайт kraken com
посмотреть в этом разделе кракен вход
At Rubbish Taxi, we manage your house clearance requirements, whether it is a home renovation, room redecoration, or clearing out old items. Our services cover comprehensive house removals and clearances across Dublin and other cities where we operate. We can collect various bulky items, including sofas, bed frames, mattresses, chest of drawers, wardrobes, fridges, freezers, washing machines, dishwashers, ovens, musical instruments, and more. Count on us for a seamless experience https://rubbish-taxi.ie/
продолжить кракен маркет
Продолжение сайт кракена
Компания РТХ (Русский Торговый Холдинг) Компания РТХ – ваш стратегический партнер в мире промышленной химии, предлагающий передовые технологии и надежные поставки для обеспечения устойчивого роста вашего бизнеса. Мы не просто поставляем химические продукты, мы предлагаем комплексные решения, оптимизированные под ваши конкретные задачи. Широкий спектр химической продукции для различных отраслей промышленности: от базовых полимеров и органических растворителей до специализированных катализаторов и адгезивов. РТХ постоянно расширяет свой ассортимент, чтобы удовлетворить растущие потребности современной промышленности. Индивидуальный подход и экспертиза: наши технические специалисты предоставляют профессиональную поддержку в выборе оптимальных химических решений, учитывая особенности вашего оборудования, технологических процессов и экологических требований. Мы разрабатываем индивидуальные рецептуры и предлагаем инновационные решения для повышения эффективности производства. Гарантия качества и безопасности: строгий контроль качества на всех этапах производства и логистики, подтвержденный международными сертификатами и соответствием нормативным требованиям. Мы гарантируем стабильность и безопасность поставляемой продукции. РТХ: надежный поставщик, ориентированный на долгосрочное сотрудничество, предлагая гибкие условия оплаты, оперативную доставку и техническую поддержку. Мы стремимся быть для вас не просто поставщиком, а надежным партнером в достижении ваших бизнес-целей
believeandachieve – Smooth browsing and nice site layout, items load quickly and look appealing.
?????????
Следующая страница кракен зеркало
интернет кракен актуальная ссылка на сегодня
Источник Kra43.cc
Смотреть здесь кракен вход
Смотреть здесь kraken маркетплейс
нажмите kraken даркнет рынок
перейдите на этот сайт кракен это
узнать больше Здесь выпускайте кракена
взгляните на сайте здесь kraken
подробнее кракен вход
узнать больше выпускайте кракена
browse here – Everything was well-structured, making it easy to look through items.
веб-сайте kra43.at
пояснения кракен переходник
http://skyiwredshjnhjgeleladu7m7mgpuxgsnfxzhncwtvmhr7l5bniutayd.onion
Подробнее здесь кракен шоп
ссылка на сайт кракен вход
перейти на сайт кракен актуальная ссылка на сегодня
заказать курсовую заказать курсовую .
подробнее кракен маркетплейс
Подробнее здесь кракен официальный
new grove shop – Browsing was effortless and items were easy to locate.
porno
найти это Перейти на сайт kraken
покупка курсовой покупка курсовой .
horizon hub link – Smooth interface and well-organized items enhanced browsing.
Перейти на сайт kraken даркнет рынок
веб-сайт kraken маркетплейс
birchoutletlane – Items are clearly presented, making browsing fast and pleasant.
содержание кракен ссылка
Trendy Selection Hub – Explore new and stylish products with a smooth browsing experience.
веб-сайте кракен маркет
Источник кракен 2025
blsp at сиськи
перейдите на этот сайт кракен маркет
timberlinehubstudio – Inspiring design and smooth navigation make exploring projects fun and easy.
Источник кракен официальный
другие кракен ссылка
ForestGroveGoods – Intuitive interface, items are easy to view and select.
узнать больше kraken com
индивидуальный предприниматель Муравьев Александр Викторович публичная оферта ИНН: 245729251161 публичная оферта”, “ОГРНИП: 316505000065161 публичная оферта”, “ИП Муравьев А.В. публичная оферта”, “индивидуальный предприниматель Муравьев Александр Викторович публичная оферта”
кликните сюда кракен маркетплейс
посетить веб-сайт кракен ссылка
Wonder Peak Market – Products are well-organized and shopping feels effortless.
онлайн слоти слоти безкоштовно
Sun Meadow Hub – User-friendly interface and neat layout simplified browsing.
найти это kra43.at
подробнее здесь кракен актуальная ссылка
этот контент Kra43.cc
shopcornerzone – Quick navigation, smooth experience, and products are organized neatly.
продолжить сайт кракена
посетить сайт кракен зеркало
Отдых в Ялте: экскурсии и туры Лучшие экскурсии в Ялте: Рейтинг самых интересных маршрутов Ливадийский дворец, Ай-Петри, Массандровский дворец, Никитский ботанический сад – это лишь некоторые из жемчужин Ялты, которые стоит посетить. Каждая из этих достопримечательностей имеет свою уникальную историю и предлагает незабываемые впечатления. Выберите экскурсию, которая соответствует вашим интересам, и отправляйтесь в увлекательное путешествие!
узнать больше кракен вход
I think this is one of the most vital information for me.
And i’m glad reading your article. But want to remark on few general
things, The website style is perfect, the articles is really
nice : D. Good job, cheers
посмотреть на этом сайте kra43.at
найти это кракен шоп
Cozy Timber Picks – Enjoyed the simple structure; it made shopping feel relaxed and convenient.
перейдите на этот сайт Перейти на сайт kraken
нажмите здесь Перейти на сайт kraken
crestartoutlet – Pages load fast and products are easy to locate, shopping felt pleasant.
style picks hub – Loved how simple it was to browse through everything without confusion.
страница кракен шоп
смотреть здесь кракен шоп
здесь кракен переходник
подробнее Перейти на сайт kraken
ссылка на сайт сайт кракена
посетить веб-сайт kraken маркетплейс
shop new picks – Items loaded quickly and the layout was easy to follow.
Смотреть здесь сайт кракена
Узнать больше кракен переходник
пояснения Kra43.cc
купить натяжной потолок Матовые натяжные потолки: Элегантность и практичность в одном Матовые натяжные потолки – это классическое решение для тех, кто ценит спокойствие и уют в интерьере. Их поверхность лишена блеска, что создает эффект идеально ровного, окрашенного потолка. Они прекрасно подходят для любого помещения, от спальни до офиса, и не отвлекают внимание от других элементов декора. Матовые потолки неприхотливы в уходе, легко моются и не выгорают со временем, сохраняя свой первоначальный вид на долгие годы.
кликните сюда кракен официальный сайт
milf porno
golden boutique access – Browsing felt natural and product sections were easy to follow.
курсовые работы заказать курсовые работы заказать .
Подробнее здесь кракен вход
веб-сайте кракен переходник
сколько стоит заказать курсовую работу сколько стоит заказать курсовую работу .
Перейти на сайт Перейти на сайт kraken
Узнать больше kraken
другие кракен ссылка
веб-сайте кракен официальный
нажмите, чтобы подробнее kra43.at
Смотреть здесь кракен официальный сайт
Отдых в Ялте: экскурсии и туры Экскурсии в Ялте: Откройте для себя жемчужину Крыма
dreamleafgallery – I found some nice products quickly — layout is clean and user‑friendly overall.
каталог kraken
brightorchardhub – The site feels inviting and easy to navigate, loved browsing through items today.
нажмите здесь Перейти на сайт kraken
купить натяжной потолок Натяжные потолки: Идеальное решение для вашего дома
https bs2web at
подробнее здесь kraken darknet market
BlueStone Finds – Loved how easy it was to browse and locate products.
ігрові слоти слоти безкоштовно
growselection – Products are easy to find, and the site feels intuitive.
collection hub link – The layout was clear and made browsing through everything feel effortless.
I was referred to this web site by my cousin. I’m not sure who has written this post, but you’ve really identified my problem. You’re wonderful! Thanks!
Best American Healthcare University offers CNA certification training classes Online. Train from anywhere in California. Complete the 160 hybrid course. Clinical hours are completed in person in a skilled nursing facility. This program is state approved. Remember certification only comes after the student successfully passes the state exam. You only need your phone for the online class and a google chrome browser. A computer is great, but not necessarily needed. 951 637 8332. Enroll now at https://www.bestamericanhealthed.com/online-cna-program
boutique corner – Well-structured layout and clear sections improved shopping.
digitalcommand.click – Mobile version looks perfect; no glitches, fast scrolling, crisp text.
Khao555 com
подробнее kraken darknet market
brooklynmodernhub – Clean design, shopping is smooth and intuitive.
clickrevenue.click – Appreciate the typography choices; comfortable spacing improved my reading experience.
anal threesome porno
shop golden collection – Smooth navigation and neatly displayed products improved browsing.
khao555 casino online
такой kraken darknet market
пояснения кракен даркнет маркет
Timber Outlet Store – Everything loads smoothly and the layout keeps things simple and user-friendly.
нажмите, чтобы подробнее kraken официальные ссылки
взгляните на сайте здесь kraken onion зеркала
здесь blacksprut зеркала
NewGroveEssentials Online – Smooth browsing and clear sections made finding items effortless.
Вызвать эвакуатор Эвакуатор в Таганроге – это символ надежды для тех, кто столкнулся с поломкой, ДТП или другими неприятностями, требующими немедленной транспортировки транспортного средства.
Northern Mist Collection – Well-organized pages and responsive design helped me select items easily.
узнать больше Здесь сайт kraken darknet
Дом из клееного бруса цена под ключ Дома из клееного бруса Краснодар – это прекрасное сочетание традиций деревянного зодчества и современных технологий, это возможность построить теплый, уютный и долговечный дом в живописном уголке России, наслаждаясь красотой природы и благоприятным климатом.
веб-сайт сайт kraken darknet
goldenartstore – Smooth pages with clearly arranged products, made browsing a breeze.
Sun Meadow Treasures Online – The layout is neat, allowing smooth browsing and fast discovery of items.
discover items – Everything felt neatly arranged, which made searching easy.
coastline hub – Clean layout and clear categories made shopping enjoyable.
зайти на сайт блэкспрут зеркало
a href=”https://growyourmindset.click/” />mindzone – Clean design, smooth browsing, and products are simple to find.
a href=”https://brightnorthboutique.shop/” />northridgecollection – Very user-friendly, shopping feels effortless and organized.
найкращі слоти слоти онлайн
бездепозитные бонусы
Следующая страница kraken ссылка зеркало
ігри онлайн казино ігри в казино
kasyno mostbet bonus mostbet
курсовые работы заказать курсовые работы заказать .
Узнать больше kraken актуальные ссылки
black porno
shop willow boutique – Intuitive design and responsive layout improved browsing.
Эвакуатор Услуги эвакуатора охватывают широкий спектр ситуаций. Будь то легковой автомобиль, мотоцикл, грузовик или спецтехника, профессиональная команда обеспечит безопасную погрузку и транспортировку в нужное место. Аккуратность и соблюдение всех норм безопасности – приоритет в работе каждой смены.
Услуги эвакуатора Вызвать эвакуатор – это первый шаг к решению проблемы, возможность быстро и безопасно доставить автомобиль в автосервис или на стоянку, избежав дальнейших повреждений и неприятностей. Это звонок в службу спасения для вашего автомобиля.
бездепозитные бонусы в казино с выводом без пополнения
бездепозитный бонус казино в казахстане
That’s some inspirational stuff. Never knew that opinions might be this varied. Thanks for all the enthusiasm to supply such helpful information here.
Northern Mist Marketplace – Clean interface and well-displayed products made selecting items easy.
urbanvinecollective – The design is friendly and intuitive — shopping here feels straightforward and pleasant.
Coastal Ridge Treasures – Everything is laid out nicely, making shopping enjoyable and simple.
lunarcrestlifestyle – Product pages load quickly and items are easy to view — very pleasant experience.
Эвакуатор таганрог Эвакуатор – это не просто машина, это ангел-хранитель на дороге, готовый прийти на помощь в самый трудный момент, когда автомобиль вдруг отказывается повиноваться, превращая запланированную поездку в кошмар.
Wild Shore Finds – Clean layout and intuitive navigation made browsing effortless.
Growth Mindset Daily – Daily resources for building habits, skills, and personal achievement.
soft mountain shop – Browsing was smooth and items were simple to locate.
Todo lo que un hombre debe saber antes de operarse lo explican los especialistas de la Clínica de Urología Moderna.
Lunar Peak Outlet – Browsing is easy and the products look great.
porno
best budget picks – Wide selection at good prices and the user flow felt straightforward.
Конкурс кандидатов Опыт работы – это капитал, который растет с каждым новым проектом. Даже временная работа или частичная занятость – это кирпичик в фундаменте вашей карьеры.
сколько стоит сделать курсовую работу на заказ http://www.kupit-kursovuyu-9.ru .
homepick – Smooth interface, items are organized and simple to explore.
wildpeakhub – Very intuitive layout, items are easy to locate.
evermeadowgoods – Great selection and intuitive navigation helped me explore products without hassle.
MountainMistStudio Finds – The clean layout and well-arranged items made shopping pleasant.
Bright Timber Boutique – Easy navigation and variety of items made shopping stress-free.
puremeadowmarket – Spent a bit of time browsing and everything felt smooth and consistent.
Continue jaxx
coastlinegather – Really enjoyed browsing here today, everything loaded quickly without problems.
Mountain Wind Hub Online – Fast loading and logical layout allowed me to find everything easily.
moonfall hub – Items loaded quickly and sections were easy to browse.
Visit Your URL wallet jaxx
teens porno
Shop Here Now – It’s so easy on the eyes and loads in a flash, perfect for a relaxed browse.
Urban Seed Essentials – Fast browsing experience with a neat, organized layout.
softrosecollection – Clear interface with organized products, shopping was simple.
Отбор сотрудников Надёжная компания – это компас в бушующем море экономики. Социальный пакет и медицинская страховка – это гарантия вашей безопасности и благополучия.
check here jaxx wallet liberty
see this website jaxx liberty download
курсовая работа недорого курсовая работа недорого .
puregreencornerstore – Navigation is effortless, shopping feels intuitive and calm.
makeeveryhub – Simple interface, smooth browsing, and items are well presented.
sunset wood shop – Browsing felt smooth and items were easy to locate.
подробнее vodkabet
EverRoot Studio Shop – The interface is neat and product presentation is attractive, making selection easy.
бездепозитные бонусы в казино казахстан
в этом разделе vodka bet
бездепозитные бонусы за регистрацию в казино с выводом без пополнения и без вейджера 1000
бездепозитные бонусы казино в казахстане
black porno
TreasureCrest – Well-organized pages allowed me to find items quickly.
golden root shop – Browsing was smooth and products were easy to find.
GoldenBranchMart Deals – Organized pages and clear labels made browsing enjoyable.
Подробнее vodka bet casino
смотреть здесь казино водка
бездепозитные бонусы за регистрацию
I was reading through some of your content on this internet site and I believe this web site is very informative ! Continue posting .
Autumn Market – Everything is organized nicely and shopping is convenient.
build success – The pages are well-structured and exploring items is hassle-free.
Fresh Meadow Select – Shopping is effortless with a clean, welcoming design.
goldenrootemporium – Very organized interface, products are easy to explore.
Click for NobleGrove – The variety is fantastic and the site’s structure makes everything easy to find.
Urban Fashion Picks – Explore the latest streetwear and elevate your daily style.
Pasture Selection – The site feels responsive, and finding items is very simple.
moderncorner – Well-structured layout, products easy to explore, and navigation feels seamless.
ко ланта карта Важной частью инфраструктуры часто бывает водоснабжение и система водоподготовки. На Ко Ланте не редкость сбор дождевой воды, а в некоторых домах стоят резервуары. При выборе жилья подумайте о запасе воды на случай отключений. Хорошо, когда есть фильтры или система фильтрации для питьевой воды. Защита от насекомых и кондиционер — дополнительные удобства.
BrightStone Corner – The well-laid-out pages and sharp photos made browsing quick.
black porno
ссылка на сайт vodkabet
Timber Crest Corner Finds – Pleasant browsing experience with intuitive layout and fast loading.
bright pine access – Items are clearly presented and the interface is user-friendly.
rarestylecentral – Smooth layout and neat categories, shopping was enjoyable.
softpineoutlet – The pages loaded fast, no annoying wait times — really good user experience.
silveroakstudio – This store feels reliable, information seems clear and browsing was stress-free.
Evergreen Picks – The layout is clear and shopping feels effortless.
I teach how to install, update, and manage Trezor Suite with confidence, guiding users through each feature. My content is designed for clarity and practical application.
trezor suite bridge
evergreen access – Fast-loading pages and a tidy interface make shopping comfortable.
leaffallboutique – Easy to navigate, items are logically arranged and accessible.
LunarHarvest Mart – The site layout was clean and items were easy to locate quickly.
фриланс Удаленная работа отзывы — отзывы сотрудников помогают понять реальный климат компании и качество рабочего процесса. Чаще всего положительные моменты — гибкий график, возможность совмещать работу с учёбой и семейными делами, рост профессиональных навыков и расширение географии сотрудничества. Минусы включают ощущение изоляции, необходимость самостоятельного мотивационного управления и постоянного онлайн-общения, а также риски неопределённости задач и часовых поясов. Важно анализировать повторяющиеся сигналы, сопоставлять их с конкретной вакансией и условиями оплаты. Всегда проверяйте источники отзывов и помните, что опыт одного сотрудника может не отражать общую картину.
ко ланта отели Пляжи Ко Ланты — в разных участках острова можно сочетать пляжный релакс с активностями: романтические вечера у Ba Kan Tiang и Kantiang Bay, активный отдых и семейные дни на Long Beach и Klong Dao, сноркелинг и лодочные экскурсии у южных берегов к коралловым рифам. Старый город и восточное побережье предлагают не только пляжи, но и культурный опыт: рынки, кафе на набережной и возможность познакомиться с местной кухней. Инфраструктура умеренная, поэтому стоит планировать передвижения и аренду транспорта заранее — это экономит время и обеспечивает большую гибкость. Не забывайте сезонность: зима часто благоприятна для плавания и спокойной погоды, лето приносит тёплую воду, но и риск дождей.
электрокранизы https://prokarniz36.ru/ .
оценка ущерба после затопления оценка ущерба после затопления .
brightwinterstore – Products look appealing and navigation is smooth — a good shopping experience.
Flourish & Learn Daily – Resources to guide your learning, growth, and self-improvement every day.
интернет магазин филлеров интернет магазин филлеров .
tg @‌links_dealer | effective seo links for spinbetter.link
Cozy Cabin Choice – Browsing is simple, and the design feels comfortable and inviting.
EverWild Haven – Organized pages and smooth navigation made shopping stress-free.
Explore Products – The organized categories and fast performance removed all the usual frustration.
smilehub – Clean layout with fast-loading pages made exploring items effortless.
удаленная работа отзывы Удаленная работа отзывы — реальные истории работников подсказывают сильные и слабые стороны удалённого формата. Положительные акценты чаще всего касаются гибкости графика, отсутствия длительных поездок, возможности совмещать работу с учёбой или семьёй, а также расширения географии сотрудничества и повышения автономии. В отзывах часто отмечают развитие навыков самоконтроля, дисциплины и способности организовать своё время, умение эффективно коммуницировать и работать в распределённых командах. Из минусов упоминаются ощущение изоляции, трудности с поддержанием команды и мотивации без офиса, необходимостью регулярного онлайн-общения и возможные перегрузки от неопределенности задач или смены часовых поясов. Пользовательские отзывы полезны для оценки реального климата в компаниях и проектах: смотрите на повторяющиеся сигналы, анализируйте условия оплаты и карьерный рост, обращайте внимание на баланс между рабочими часами и личной жизнью.
работа онлайн в контакте работа на удаленке вакансии
Silver Moon Selections – Organized layout and clear menus made finding items quick.
shop timber picks – Items were easy to view and layout was clear.
I create training content that helps users understand Trezor Suite deeply, including security features and portfolio management tools. My tutorials are crafted for easy learning.
trezor desktop download
True Horizon Central – Items load seamlessly, and finding products is easy.
фриланс работа Фриланс работа — широкий спектр проектов, где вы сами устанавливаете ставки и договариваетесь об условиях. Развивайте нишу, создавайте регулярное портфолио, собирайте отзывы клиентов и расширяйте сеть контактов. Важно уметь оценивать объём задач, устанавливать реалистичные сроки и поддерживать качественную коммуникацию через чат, видео и документы. Налаживайте работу с клиентами через договоренности и платёжные сервисы, чтобы обеспечить прозрачность сделки и защиту интересов.
featured picks – Everything loaded fast and the organization made shopping easygoing.
hillstorecorner – Layout is tidy, navigating products is smooth and intuitive.
TG @‌LINKS_DEALER | EFFECTIVE SEO LINKS FOR SPINBETTERAPP.COM
brightcoastgallery – Loved the clean layout, made browsing items smooth and hassle-free today.
glowingridgehub – The atmosphere of the shop feels pleasant, visuals and text blend nicely together.
brightwillowboutique – Clean design and easy layout helped me find interesting items fast.
гардина с электроприводом prokarniz36.ru .
затопили квартиру что делать затопили квартиру что делать .
опубликовано здесь https://kra48a.at/
Iron Valley Designs Hub – Smooth browsing and clear visuals helped me find what I wanted easily.
нажмите vodkabet прямо сейчас
филлеры москва оптом http://filler-kupit.ru/ .
посмотреть на этом сайте водкабет
Источник vodkabet прямо сейчас
нажмите зеркало водка бет
веб-сайт водкабет
в этом разделе vodkabet онлайн казино
Dream Achievers Hub – Resources to help you stay consistent and inspired while pursuing goals.
перейдите на этот сайт vodka bet casino
MidRiverDesigns Portal – Crisp images and clean layout made browsing effortless.
посетить сайт vodkabet онлайн казино
Перейти на сайт водкабет
этот сайт водкабет
Главная vodka bet
веб-сайте vodkabet
перейдите на этот сайт vodkabet водкабет казино
Смотреть здесь водка бет
узнать водка бет
найти это vodkabet водкабет казино
этот сайт vodkabet водка бет казино
Узнать больше vodka премиум онлайн казино
Whitestone Studio – Navigation is intuitive and the store feels well-structured.
кликните сюда vodkabet водкабет казино
Смотреть здесь зеркало водка бет
посетить веб-сайт vodka bet
rusticridgeboutique – Pleasant browsing experience, items are easy to view and site feels well structured.
веб-сайт vodkabet
BM Corner Finds – Enjoyable browsing with fast access to products.
shopselection – Pages load quickly, items are organized, and browsing is natural.
Shop With Ease – The comfortable and smooth user experience was a standout feature.
кликните сюда водкабет
Подробнее vodka bet casino
Подробнее vodka bet
посетить сайт vodkabet
найти это водка бет
читать водка бет
нажмите, чтобы подробнее vodkabet онлайн казино
другие зеркало водка бет
Смотреть здесь водкабет
узнать больше зеркало водка бет
выберите ресурсы vodkabet онлайн казино
читать водкабет
веб-сайт kra47.at
читать kra48.cc
работа на удаленке вакансии Поиск работы — систематический процесс, включающий исследование рынка, формирование резюме и активное участие в собеседованиях. Определите отраслевые направления, составьте карьерный план и выделите ключевые навыки. Используйте профессиональные соцсети, порталы с вакансиями и контакты в сети для знакомства с рекрутерами. Подготовьте «путь к найму»: резюме, сопроводительное письмо, примеры работ и готовность к онлайн-интервью. Ваша настойчивость и способность быстро адаптироваться чаще всего решают задачу получения предложения о работе.
этот контент зеркало водка бет
нажмите https://kra48a.at/
продолжить водка бет
silvercornerstore – Well-laid-out sections and tidy interface, shopping was hassle-free.
посмотреть в этом разделе водкабет играть сейчас
смотреть здесь https://kra48a.at/
узнать больше vodka bet
такой kra47.at
перейти на сайт зеркало водка бет
tg @‌links_dealer | effective seo links for india-aviator-game.net
перейти на сайт kra48.at
modern finds – Items were easy to explore and the interface was responsive.
Смотреть здесь зеркало водка бет
Узнать больше vodkabet водкабет казино
Подробнее vodkabet онлайн казино
опубликовано здесь vodka bet
здесь kra48.cc
Источник водка бет
каталог vodkabet прямо сейчас
Продолжение vodkabet
hillfashionhub – Clean presentation, products are easy to locate and browse.
Смотреть здесь зеркало водка бет
на этом сайте vodkabet онлайн казино
купить диплом документы россии http://www.r-diploma25.ru .
Смотреть здесь зеркало водка бет
кликните сюда водка бет
пояснения водкабет
перенаправляется сюда https://kra48a.at
Смотреть здесь зеркало водка бет
узнать больше Здесь https://kra48a.at
интернет водкабет
нажмите, чтобы подробнее водка бет
остров ко ланта в тайланде Дайвинг-центры на Ко Ланте предлагают курсы и погружения на любой уровень подготовки. Инструкторы говорят на английском, часто показывают лучшие точки у рифов и мангров. Можно арендовать снаряжение и взять дневную экспедицию по соседним местам. Атмосфера дружелюбная и хорошо организована: многие центры предлагают транзит от отелей, фото- и видеоматериалы после погружения, а также советы по выбору маршрутов под погодные условия. Дайвинг вокруг Ко Ланты — отличный способ увидеть манту, барракуд и богатство подводного мира в спокойной атмосфере острова
зайти на сайт https://kra48a.at
подробнее здесь vodka bet
brightfallstudio – Enjoyed browsing here, items seem well curated and easy to explore.
Продолжение vodkabet
Подробнее здесь vodkabet водкабет казино
сайт kra48.cc
веб-сайт водкабет
зайти на сайт зеркало водка бет
Перейти на сайт водкабет
Читать далее https://kra48a.at/
содержание водка бет
ссылка на сайт водкабет
узнать больше Здесь vodkabet онлайн казино
кликните сюда водкабет играть сейчас
Soft Feather Market Shop – Clean layout and intuitive navigation made browsing quick and pleasant.
электронный карниз для штор http://www.prokarniz36.ru .
сюда vodkabet водкабет казино
Источник vodka bet
узнать больше vodka bet casino
Растаможили партию iPhone без https://wiki.voice-technology.nl/index.php/Tamozhennoe-oformlenie_3Eопросов
посмотреть на этом сайте vodkabet
пояснения vodkabet прямо сейчас
затопили квартиру что делать затопили квартиру что делать .
этот контент vodkabet онлайн казино
на этом сайте зеркало водка бет
найти это vodka bet
посетить сайт зеркало водка бет
веб-сайт vodkabet
Читать далее vodka bet
посетить веб-сайт водка бэт
каталог https://kra48a.at
узнать больше https://kra48a.at/
подробнее vodka bet casino
этот контент https://kra48a.at/
веб-сайте https://kra48a.at/
смотреть здесь vodka bet
посмотреть в этом разделе kra48.cc
этот сайт зеркало водка бет
содержание https://kra48a.at/
филлеры цена филлеры цена .
ко ланта аэропорт Ко Ланта что посмотреть — помимо пляжного отдыха остров предлагает культурные и природные достопримечательности: Mu Ko Lanta National Park на юге с тропами к смотровым площадкам и пляжем, Старый город Ko Lanta с рынками и колониальной архитектурой, а также близлежащие островки Koh Haa и Koh Bida для сноркелинга. Виды с смотровых площадок, например с Khao Mai Kaew, открывают панорамы на Андаманское море и закаты. В окрестностях можно посетить заповедники мангров и рыбные рынки, а местные кафе и бары дают возможность попробовать свежую морепродукты.
веб-сайте зеркало водка бет
нажмите здесь vodka bet
shop studio hub – Items are displayed clearly and navigation was effortless.
здесь vodkabet прямо сейчас
на этом сайте vodkabet водка бет казино
смотреть здесь зеркало водка бет
веб-сайте зеркало водка бет
Подробнее здесь зеркало водка бет
нажмите здесь vodkabet онлайн казино
посмотреть в этом разделе зеркало водка бет
Moon Fabrics Hub – Fast browsing and simple navigation helped me explore all products easily.
на этом сайте vodkabet
кликните сюда vodka bet casino
подробнее здесь vodkabet онлайн казино
ссылка на сайт vodkabet онлайн казино
нажмите здесь https://kra48a.at
интернет kra48.at
Подробнее здесь vodkabet онлайн казино
читать водкабет
Смотреть здесь vodkabet прямо сейчас
интернет водка бет
Читать далее зеркало водка бет
нажмите здесь водка бет
можно проверить ЗДЕСЬ vodkabet онлайн казино
I appreciate your work, thanks for all the great blog posts.
Источник vodkabet онлайн казино
Подробнее здесь зеркало водка бет
TG @‌LINKS_DEALER | EFFECTIVE SEO LINKS FOR AVIATOR.COM.IN
нажмите здесь vodkabet
перейдите на этот сайт vodka bet casino
ссылка на сайт vodkabet онлайн казино
Visit PineHill Studio – Simple structure and clean pages made browsing easy and comfortable.
Sunny Slope Boutique – Simple layout and fast navigation make exploring products enjoyable.
learnzonehub – Simple and clean interface, products are easy to locate and explore.
Продолжение kra47.cc
остров ко ланта в тайланде Ко ланта отели — здесь представлены варианты на любой бюджет: от бюджетных гостевых домов и бунгало до средне-уровневых курортов и роскошных вилл у моря. Основные районы концентрации — Long Beach, Klong Khong и Klong Dao, где доступны пляжные удобства, рестораны и развлечения, а также удобный доступ к паромам. В Старом городе можно найти очаровательные гостевые дома и уютные виллы, а на юге — тихие бухты и виллы на побережье Ba Kan Tiang. Высокий сезон обычно приносит повышение цен, поэтому планируйте бронирование заранее; межсезонье часто сопровождается скидками. При выборе отеля обращайте внимание на близость к пляжу, наличие Wi-Fi, трансфер, завтрак и возможности аренды транспорта.
EverduneGoods Products – A tidy structure kept browsing simple and enjoyable from start to finish.
Читать далее vodkabet
каталог vodkabet прямо сейчас
нажмите здесь kra48.at
смотреть здесь водка бет
подробнее vodka bet
Shop Here Now – It’s so easy to shop when products look that good and the site is so well-ordered.
проверить сайт водкабет
Смотреть здесь vodka bet
bright corner picks – The site responded fast and I liked how organized it all felt.
Смотреть здесь https://kra48a.at
посетить веб-сайт зеркало водка бет
казино без верификации
forestcalmcorner – Clean layout, navigating products feels effortless.
посетить сайт vodkabet прямо сейчас
продолжить vodka bet
ссылка на сайт vodka bet
проверить сайт vodkabet онлайн казино
здесь водка бет
ко ланта отели где ко ланта — географически Ко Ланта находится в Андаманском море, в юго-западной части Таиланда, в провинции Крабі, недалеко от островов Кроти и Trang. Острова Ko Lanta Yai и Ko Lanta Noi соединены мостом, а порт Saladan служит основным узлом для переправ на материк и соседние острова. Расположение в пределах крорбийской зоны делает его удобной базой для посещения местных парков, пляжей и близлежащих бухт. В окрестностях легко найти маршруты на прокат скутера или велосипеда, что позволяет исследовать побережье и заповедные тропы без зависимости от экскурсионных программ.
обзор казино
страница vodkabet прямо сейчас
winter corner – Fast loading and clean design made exploring products effortless.
Следующая страница vodkabet прямо сейчас
пояснения вотка бет
лучшие онлайн казино в россии
этот сайт вотка бет
Смотреть здесь vodkabet онлайн казино
посетить веб-сайт зеркало водка бет
выберите ресурсы vodka bet
нажмите здесь kra47.at
узнать больше vodkabet онлайн казино
Simply wish to say the frankness in your article is surprising.
опубликовано здесь вотка бет
сюда vodka премиум онлайн казино
Главная зеркало водка бет
DeepBrook Boutique – The site feels tidy and well-structured, making selection quick and easy.
нажмите здесь vodkabet
казино онлайн список
подробнее водкабет играть сейчас
взгляните на сайте здесь vodkabet водкабет казино
I cannot thank you more than enough for the blogposts on your website. I know you set a lot of time and energy into these and truly hope you know how deeply I appreciate it. I hope I’ll do a similar thing person sooner or later.
веб-сайте vodkabet
Узнать больше водка бет
Следующая страница водка бэт
каталог vodkabet водка бет казино
softmeadowstudio – Really liked how smooth and clean the site felt while browsing items today.
где ко ланта как добраться до ко ланты — оптимальные варианты зависят от вашего исходного пункта: из Крби или Trang — регулярные паромы до Saladan; из Бангкока можно долететь в Krabi International или Trang Airport, а затем добраться паромом до Ко Ланты (путь займёт примерно 2–3 часа после прибытия в порт). В высокий сезон можно выбрать прямые скорости до Ко Ланты из некоторых курортов, но чаще приходится делать пересадку через материк и паром. Поездка на автомобиле или такси до пирса, затем паром — удобное решение для путешественников с багажом. Также можно добраться через Phuket, но чаще всего это путь через Krabi: перелёт/автобус до Krabi, затем паром до Saladan.
сайт водкабет
нажмите здесь зеркало водка бет
посетить веб-сайт kra48.cc
можно проверить ЗДЕСЬ vodka bet casino
This is an awesome entry. Thank you very much for the supreme post provided! I was looking for this entry for a long time, but I wasn’t able to find a honest source.
казино с выводом без верификации документов бесплатно
wild finds – Fast pages and tidy layout made browsing products easy.
казино без верификации и паспорта с выводом выигрышей
такой vodkabet водка бет казино
выберите ресурсы vodkabet
ссылка на сайт vodka bet casino
Moon Haven Collection Online – Pleasant browsing experience thanks to clean design and organized sections.
tg @‌links_dealer | effective seo links for 888-starz.pl
Перейти на сайт kra47.at
как добраться до ко ланты пляжи ко ланты — В дополнение к основным пляжам на Ko Lanta есть ещё несколько жемчужин: Nui Bay и Bamboo Bay в северной части предлагают тихие воды и живописные скалы, а Klong Khong и Klong Nin часто выбирают за близость к инфраструктуре и вечернюю атмосферу. Вдоль побережья можно найти пляжи с различной степенью людности: от чистых и спокойных мест до береговых зон с активной ночной жизнью в ряде курортных участков. Любители подводного плавания оценят мелкие рифы у крайних бухт и плавную волну в прозрачной воде. В целом, пляжная карта Ко Ланты сочетает песок, умеренную глубину и возможность выбрать между тихим семейным отдыхом и более оживленной полосой вдоль главных туристических улиц.
проверить сайт https://kra48a.at/
читать kra47.cc
Смотреть здесь kra48.cc
ссылка на сайт vodka bet casino
продолжить водкабет играть сейчас
новое казино
зайти на сайт kra47.at
читать kra48.at
проверить сайт водка бэт
Читать далее https://kra48a.at
кликните сюда https://kra48a.at
подробнее здесь vodka премиум онлайн казино
подробнее здесь https://kra48a.at
выберите ресурсы kra48.cc
herbalhub – Product listings are well-organized, checkout was fast.
другие vodkabet водка бет казино
сюда kra47.at
каталог https://kra48a.at
Just what I needed to know thank you for this.
посмотреть в этом разделе vodkabet водка бет казино
погода ко ланта Краби ко ланта как добраться — из Krabi Town или Ao Nang можно добраться до Ko Lanta Yai несколькими способами: медленный паром, скоростной катер и комбинированные варианты «ван + паром» или «автобус + паром». Время в пути обычно около 2–3 часов, но может удлиняться из-за погодных условий и расписания. Ao Nang часто предлагает прямые маршруты на ближайшие причалы Ko Lanta Yai, что упрощает планирование для отдыхающих на краю Краби. Планируйте заранее, учитывайте сезон и дождливый период, чтобы выбрать оптимальный маршрут и минимизировать время в пути.
Источник kra48.at
посетить веб-сайт kra47.at
Timeless Harvest Browse – Organized pages and simple navigation created a relaxed browsing experience.
wave store – Navigation feels intuitive and products are displayed neatly.
coastalmiststyle – Items are well-arranged, making browsing calm and straightforward.
I appreciate your work, thanks for all the great blog posts.
Следующая страница kra48.at
ссылка на сайт kra47.cc
узнать больше https://kra48a.at
веб-сайте kra48.cc
harvest picks – The site feels professional and organized, making browsing effortless.
Urban Vibe Shop – The variety of items is impressive, and moving around the site is seamless.
узнать больше https://kra48a.at/
узнать больше Здесь kra47.cc
TrendyLivingCorner – Easy to browse, content is interesting and lively.
погода ко ланта паром ко ланта — Паромная переправа связывает Ko Lanta с материковой частью Таиланда через пирсы в Krabi Town, Ao Nang и Ban Saladan на острове. Обычно добираются сначала до пирса на материке, затем переправляются на Ko Lanta Yai; время в пути варьирует в зависимости от маршрута, погодных условий и типа переправы — от примерно 2 до 4 часов. В сезон сильных волн расписания могут изменяться, поэтому рекомендуется заранее бронировать билеты через агентство или в кассах пирсов. Быстрые скоростные лодки и частные трансферы тоже доступны, но стоят дороже. Паромная часть пути добавляет путешествованию романтики и позволяет полюбоваться Андаманским побережьем с воды.
Everfield Home Select – Everything was neatly displayed and the site responded instantly, making shopping easy.
FashionSelectOnline – Stylish pieces with a smooth shopping process, really enjoyable today.
узнать больше Здесь kra48.at
TG @‌LINKS_DEALER | EFFECTIVE SEO LINKS FOR SPINBETTER.BET
Wild Coast Treasures Hub – Simple design and organized layout helped me browse items easily.
интернет kra47.cc
Подробнее https://kra48a.at
ссылка на сайт https://kra48a.at
продолжить kra47.cc
This blog post is excellent, probably because of how well the subject was developed. I like some of the comments too though I could prefer we all stay on the subject in order add value to the subject!
подробнее здесь kra48.at
узнать https://kra48a.at
SunCrestCrafthouse Finds – Everything was laid out clearly, helping me browse efficiently.
autumnstonecorner – The design feels warm and welcoming, giving the store a friendly and approachable vibe.
остров ко ланта в тайланде ко ланта на карте — на карте Ко Ланта изображён дугой островов: Ko Lanta Yai — главный остров, западное побережье с протяжённой береговой линией и пляжами, северная часть вокруг Saladan — порт и транспортный узел; Ko Lanta Noi — меньший соседний остров, связанный мостом. Важные точки: Saladan на севере, Long Beach на западе, Ba Kan Tiang в южной части, а мост между островами облегчает передвижение внутри архипелага. На карте можно увидеть пирсы, паромы и дороги местного значения; навигационные приложения помогут найти маршруты до пляжей и отелей.
urbanwildroot – Everything loaded quickly and smoothly, no lag — made the shopping feel pleasant.
Does it look like we’re in for a big ride here?
ссылка на сайт kra47.cc
moonstar shop – Browsing was smooth and items were easy to locate.
Just came from google to your website have to say thanks.
посмотреть на этом сайте https://kra48a.at
Corner of BrightMoor – Everything is nicely categorized, which made shopping straightforward.
перейти на сайт kra48.cc
Читать далее водка бет
перейдите на этот сайт kra47.cc
Nice read, I just passed this onto a colleague who was doing some research on that. And he just bought me lunch as I found it for him smile Therefore let me rephrase that: Thank you for lunch!
пояснения https://kra48a.at
ко ланта что посмотреть ко ланта отели — На Ко Ланте представлены варианты на любой вкус: от простых гестхаусов и бунгало у воды до роскошных вилл с частными бассейнами и видом на океан. В районах Long Beach и Kantiang можно найти современные апартаменты и маленькие бутик-отели с удобствами, а в старой части острова — гостевые дома и семейные отели по более доступным ценам. Многие варианты предлагают выход прямо к пляжу, садовую территорию, бассейны и услуги уборки; в сезон можно найти акции и скидки. Выбор зависит от того, хотите ли вы жить под шум волн или предпочитаете более спокойную, удалённую часть острова.
ссылка на сайт kra48.cc
посетить сайт kra47.at
index https://beratrax.org/
Источник kra47.cc
TG @‌LINKS_DEALER | EFFECTIVE SEO LINKS FOR SPINBETTERBET.COM
click this site https://dexrp.wtf
казино с моментальными выплатами
helpful resources https://unich.icu/
navigate to this site https://dexrp.buzz
browse this site https://kinetiq.buzz
browse around these guys https://g8keep.org
directory https://arch.credit/
Web Site https://dexrp.buzz
great site https://dexrp.wtf
lunarboutique – Very user-friendly layout, shopping feels effortless.
read what he said https://boros.cfd/
ко ланта отели остров ко ланта в тайланде — тихий тропический уголок в Андаманском море, часть провинции Крабі. Главные острова — Ko Lanta Yai и Ko Lanta Noi — соединены мостом, а на материк ведут регулярные паромы из Краби и Trang. Добраться можно не только на пароме: ближайшие крупные аэропорты — Krabi International (KBV) и Trang (TST), откуда до пирсов нужно добраться на автобусе или такси и затем пересесть на паром. Остров известен мягким климатом, зелёными джунглями, длинными пляжами и умеренной туристической нагрузкой, что делает его привлекательным для семей, пар и любителей природы. Здесь сохранена спокойная атмосфера, много природных маршрутов и уютных гостевых домов, вилл и небольших отелей.
wild store link – Navigation was intuitive and items were visually appealing.
his explanation https://d2finance.cv/
everpeakcorner – Clean interface and clear product display helped make browsing smooth and easy.
blog here https://theo.exchange/
казино с моментальными выплатами
dig this https://d2finance.cv
go to my blog https://ethereal.credit
надежное казино
hop over to this site https://hyperliquid-wiki.cv/
market picks – Everything was well arranged, making navigation comfortable and quick.
visit https://hypperswap.cloud
visit their website https://royco.cc
Continue Reading https://yieldfi.pro/
here are the findings https://arch.credit/
Rustic River Showcase – Fast and smooth navigation combined with a cozy visual style made browsing nice.
find https://etherealtrade.lat
Discover More Here https://hyperliquid-wiki.cc
check my blog https://usdai.cloud/
click over here now https://hlp0.cloud
why not try this out https://arch.credit
reference https://hypperswap.cloud
Soft Leaf Select – Clear pages and organized layout made exploring products pleasant.
directory https://liquity.cfd/
ко ланта аэропорт ко ланте отели — повторно рассмотрение темы с акцентом на приватность и характер острова: здесь много небольших семейных отелей и уединённых вилл. Часто встречаются варианты у моря с частными террасами, садовыми дорожками к пляжу и близостью к рынкам Saladan и основным пляжам, чтобы не тратить время на дорогу. На Ко Ланте больше мест, ориентированных на размеренный отдых и близость к природе, чем на бурную ночную жизнь, поэтому остров идеально подходит для пар и семей, ищущих спокойствие и расслабляющую атмосферу. Рекомендовано выбирать жильё в пределах пешей доступности к пляжу или к основным транспортным узлам, чтобы не зависеть от авто в большом потоке туристов.
view it now https://theo.sbs/
browse around this web-site https://safeglobal.club/
Discover More Here https://kittenswap.buzz/
look at this website https://gluex.io
1 вин ставки на спорт зеркало https://1win12043.ru
электрокарниз двухрядный цена provorota.su .
карнизы с электроприводом http://elektrokarniz2.ru .
лучшие онлайн казино 2025
GlamourFinds – Browsing was effortless and the products are very trendy and appealing.
find this https://gluex.io/
this https://dexrp.wtf/
More about the author https://alchemix.center/
check this https://etherealtrade.rest/
a knockout post https://avalonfinance.cv
TrendyLivingCorner – Easy to browse, content is interesting and lively.
read more https://snake.credit/
Узнал больше о кибербезопасность обучения, делюсь ссылкой. Вот ссылка: кибербезопасность обучение.
click here for more info https://terminal.credit
Official Starlight Forest – The clear menus and thoughtful categorization removed all the guesswork.
harbor selection – Fast-loading pages and neat categories made exploring simple.
about his https://dexrp.buzz
click to investigate https://etherealtrade.xyz
электрокарнизы цена электрокарнизы цена .
weblink https://gluex.io
teen porno
over at this website https://gluex.io
ко ланте Ко Ланта — это компактный, но атмосферный остров Тайланда, находящийся в Андаманском море и входящий в состав провинции Краби. Он знаменит длинными песчаными пляжами, зелёными холмами и спокойной атмосферой, где туристы ценят размеренный ритм жизни, отсутствие шумной ночной суеты и дружелюбное местное население. Остров простирается вдоль западного побережья и соединён с материком сетью паромов и скоростных лодок, что делает его удобной базой для однодневных туров к близлежащим островам, таким как Пхи-Пхи, Ко Ланта Noi иAo Nang. Внутренний ландшафт представлен кокосовыми пальмами, мангровыми зарослями и уютными гестхаусами, которые прячутся в тени тропических деревьев. Климат здесь тропический: сухой сезон длится с ноября по апрель, когда погода чаще солнечная и ветра умеренные, а влажность не достигает пиковых значений; в сезон дождей с мая по октябрь идут тёплые ливни, но они обычно короче и не мешают дневному отдыху на пляже. Для передвижения по острову наиболее удобны арендованный скутер или небольшой автомобиль, а между пляжами можно добираться на лодках, в том числе короткими прогулками по бухтам. Основные районы для проживания — северная часть у Бан Саладан и западные пляжи, такие как Лонг Бич, Клонг Дао и Кантианг Бей — где сосредоточены гостиницы на любой вкус и бюджет. Благодаря своей удалённости Ко Ланта часто рассматривается как место для спокойного отдыха с элементами роскоши в виде уютных вилл и резортов, уютных кафе и местной кухни, а также возможностью легко добраться до соседних островов и материка для однодневных поездок.
ко ланта что посмотреть ко ланте отели — повторно упоминаемая тема с акцентом на особенности острова: здесь много небольших семейных отелей и уединённых вилл, которые создают ощущение приватности. Часто встречаются варианты на берегу с частными террасами и садовыми дорожками к пляжу. Рекомендовано выбирать места с близостью к рынкам Saladan и основным пляжам, чтобы не тратить много времени на дорогу. Важная деталь — на Ко Ланте больше мест, ориентированных на спокойный отдых, чем на активные вечеринки, поэтому здесь комфортно для пар и семей, ценящих размеренный ритм и близость к природе.
visit here https://d2finance.cv
Meadow Corner – The site layout helped me discover items without confusion.
great post to read https://etherealtrade.xyz
Get the facts https://berapaw.org
her comment is here https://etherealtrade.lat
Check This Out https://gluex.io
over here https://safeglobal.club/
website link https://palladiumlabs.net
why not find out more https://d2finance.cc/
check over here https://kinetiq.buzz/
he has a good point https://theo.exchange/
check out the post right here https://gluex.io
blog link https://daodao.cfd/
сайт трипскан Трипскан — это условная платформа анализа путешествий, которая преобразует разношерстные данные о маршрутах, ценах на билеты, доступности номеров и расписаниях в понятные рекомендации для путешественников и операторов туризма. Система складывает сведения из множества источников, нормализует их, а затем применяет алгоритмы искусственного интеллекта для выявления лучших предложений, оптимальных точек пересадки и прогнозов стоимости. Пользователь получает персональные планы маршрутов, ориентированные на бюджет, расписание и личные предпочтения, а бизнес-партнёры — аналитические дашборды для оптимизации продаж. Архитектура ориентирована на масштабируемость, безопасность данных и удобство интеграции с картами, календарями и системами бронирования.
get redirected here https://kittenswap.buzz
read the full info here https://kinetiq.lat
go now https://arch.credit/
контроль остатков на складе Данные по остаткам на складе: Полная и актуальная информация о количестве и состоянии товаров на вашем складе для принятия решений.
Если интересует колледжи после 11 класс, вот полезный материал. Подробности тут: колледжи после 11 класса.
meadowtrendhub – Well-structured pages with easy navigation, shopping was hassle-free.
москва корпусная мебель на заказ Встроенная прихожая на заказ по индивидуальным размерам: Используйте каждый сантиметр пространства прихожей с максимальной выгодой, заказав изготовление встроенной мебели по вашим размерам.
В казино авиатор вин игроки могут наслаждаться захватывающими взлетами и множеством возможностей для выигрыша.
Игроки могут значительно улучшить свои результаты благодаря этому.
article source https://gluex.io
read the full info here https://hlp0.cloud/
Immerse yourself in the world of exciting betting with aviator game demo and try your luck!
Many players enjoy the social aspect of the aviator game, often playing with friends or in online communities.
have a peek here https://theo.sbs/
you can try here https://plasma.credit/
Tall Pine Collection – The neat design and clear categories improved the shopping flow.
anonymous https://prjx.space/
urbancloverlane – Layout is tidy, navigating products is smooth and intuitive.
brightvillagecorner – Items look appealing and layout feels user-friendly and welcoming overall.
imp source https://hlp0.cloud/
important site https://hyperliquid-wiki.cc
urban picks – Smooth interface and clear product images improved the shopping experience.
Check This Out https://hlp0.online
latest trends – Good overall experience; categories were easy to navigate and items were displayed attractively.
hop over to here https://plasma.credit
visit this web-site https://hlp0.cloud
site web https://beratrax.org/
see this here https://arch.credit/
Fresh Pine Boutique – The site feels tidy, and items load fast, making selection easy.
website here https://alchemix.center
his explanation https://palladiumlabs.net/
Source https://liquity.cfd
Soft Blossom Hub – The soft design and organized sections made exploring relaxing.
ко ланта что посмотреть ко ланте отели — повторно рассмотрение темы с акцентом на приватность и характер острова: здесь много небольших семейных отелей и уединённых вилл. Часто встречаются варианты у моря с частными террасами, садовыми дорожками к пляжу и близостью к рынкам Saladan и основным пляжам, чтобы не тратить время на дорогу. На Ко Ланте больше мест, ориентированных на размеренный отдых и близость к природе, чем на бурную ночную жизнь, поэтому остров идеально подходит для пар и семей, ищущих спокойствие и расслабляющую атмосферу. Рекомендовано выбирать жильё в пределах пешей доступности к пляжу или к основным транспортным узлам, чтобы не зависеть от авто в большом потоке туристов.
porno
электрокранизы http://www.provorota.su .
электрокарнизы москва https://elektrokarniz2.ru/ .
click here to investigate https://kinetiq.buzz/
more info here https://yieldfi.pro
my blog https://palladiumlabs.net/
YOURURL.com https://terminal.credit
look at these guys https://snake.credit
Платформа предлагает удобный личный кабинет с историей операций и игр. По ссылке https://sites.google.com/view/igrovoi-club-vavada/ найдёте все рабочие зеркала и инструкции. Регистрация простая и занимает несколько минут времени. Служба безопасности тщательно защищает финансовые данные игроков. Игры запускаются плавно даже при медленном интернете.
directory https://palladiumlabs.net/
webpage https://dexrp.buzz
wooden store – Well-arranged items and clear layout made exploring simple.
FastBuyHub – Smooth and fast shopping experience, I got everything I wanted.
visit this website https://ethereal.credit
Нашёл ресурс с информацией о Колледж после 11 класса. Заходите сюда: Колледж после 11 класса.
right here https://hlp0.cloud
новые бездепозитные бонусы в казино 2020 вк
moved here https://cakepad.digital
websites https://dexrp.buzz
Harbor Living Online – Browsing felt natural and stress-free thanks to the clean layout.
discover this https://d2finance.cv/
have a peek at this site https://dexrp.buzz/
webpage https://usdai.cloud/
карниз для штор с электроприводом карниз для штор с электроприводом .
трипскан зеркало tripscan — TripScan — это полнофункциональная платформа для планирования путешествий и сравнения вариантов из разных источников: авиакомпании, железнодорожные перевозчики, онлайн-агрегаторы и турагентства. Система собирает данные в режиме реального времени, анализирует цены, время в пути и количество пересадок, а также учитывает дополнительные параметры: класс обслуживания, багаж, условия возврата и удобство пересадок. Пользователь вводит маршрут, даты и предпочтения, после чего TripScan формирует оптимальные наборы вариантов, отмечает акции и сезонные скидки, а также предлагает уведомления о снижении цен. Функционал часто включает сохранение маршрутов, создание списков желаемых направлений, экспорт маршрутов в PDF или календарь, интеграцию с платежными системами и банковскими картами, а также мобильные приложения для быстрого доступа в пути. TripScan ориентирован как на индивидуальных путешественников, так и на агентов, которым нужен мощный инструмент для быстрого сравнения, планирования и экономии времени и денег.
have a peek at this site https://d2finance.cv
в каком казино дают бездепозитные бонусы
visit homepage https://arch.credit
бездепозитные бонусы за регистрацию в казино
https://towing.com.pl
their explanation https://kittenswap.cc
Browse The Catalog – A well-stocked store where great selection meets effortless navigation.
linked here https://theo.sbs/
бездепозитные бонусы за регистрацию в казино с выводом
TrendyLivingGoods – Very happy with my purchase, smooth browsing and ordering experience.
спальни на заказ Встроенные распашные шкафы на заказ: Классическое решение для хранения вещей – встроенные распашные шкафы, изготовленные на заказ по вашим размерам и с учетом ваших пожеланий.
view publisher site https://theo.exchange
Click Here https://d2finance.cv/
Recommended Reading https://gluex.io
view publisher site https://royco.cc/
article source https://liquity.cfd
you could try these out https://alchemix.center
Your Domain Name https://etherealtrade.lat
click here for more https://theo.exchange
try these out https://etherealtrade.lat
discover here https://hyperliquid-wiki.cv/
more helpful hints https://theo.exchange/
shop stone hub – Navigation felt natural and items were easy to explore.
try these out https://snake.credit/
his response https://hypperswap.cloud
leafwildlane – Smooth layout, browsing items feels comfortable and efficient.
see post https://kittenswap.buzz/
check these guys out https://arch.credit/
have a peek at this website https://looksrare.cfd/
встроенный шкаф-купе купить в москве Встроенные шкафы купе на заказ: Стильное и практичное решение для любого интерьера – встроенные шкафы-купе, изготовленные на заказ по индивидуальным размерам.
website here https://camelot.click
лучшие спа-отели Подмосковья
page https://berapaw.org
browse items – Navigation was smooth and the overall setup felt clean and simple.
find more https://arch.credit/
like it https://etherealtrade.lat/
featured items – Everything felt responsive and well-structured, which made the experience pleasant.
discover this info here https://unich.icu/
navigate to this site https://hyperliquid-wiki.cc
Resources https://palladiumlabs.net
Read More Here https://plasma.credit/
porno
you could try this out https://d2finance.cc
see it here https://safeglobal.club/
find out here https://daodao.cfd/
click now https://dexrp.wtf
blog link https://boros.cfd
linked here https://g8keep.org/
Lush Grove Emporium – Clean layout and intuitive interface helped me shop efficiently.
hop over to these guys https://beratrax.org
my explanation https://avalonfinance.cv
important link https://liquity.cfd
useful site https://etherealtrade.xyz/
web https://g8keep.org
visit homepage https://defi-money.cc
this post https://prjx.space
useful link https://daodao.cfd
you can try here https://prjx.online
see this website https://snake.credit/
Clicking Here https://kinetiq.buzz/
have a peek at this web-site https://kittenswap.cc
электрические гардины provorota.su .
карнизы с электроприводом купить https://elektrokarniz2.ru .
read this post here https://d2finance.cc/
Visit This Link https://prjx.online
read here https://etherealtrade.xyz
click to read more https://kinetiq.buzz/
трипскан сайт вход Трипскан вход – это ваш личный кабинет на платформе для планирования путешествий. Здесь вы сможете управлять своими бронированиями, отслеживать статус рейсов, получать уведомления об изменениях и пользоваться эксклюзивными предложениями. Чтобы войти в свой аккаунт, просто введите свой логин и пароль. Если вы забыли пароль, воспользуйтесь функцией восстановления. После входа вы получите доступ ко всем функциям Трипскан и сможете легко спланировать свое следующее путешествие!
Get the facts https://camelot.click
пхукет ко ланта как добраться ко ланта что посмотреть — на острове есть главные достопримечательности: Mu Ko Lanta National Park с маяками и тропами по мангровым берегам; Lanta Old Town с рыночной атмосферой и колониальными корнями; смотровые площадки у Khao Mai Kaew или у маяка на юге; шикарные пляжи: Long Beach, Kantiang Bay, Klong Nin и Ba Kan Tiang; возможность сноркелинга у коралловых бухт и плавать с мангами возле близлежащих островов Koh Rok и Koh Ha; культурные моменты — местные храмы и тишина береговой линии. Любители природы найдут здесь тропы, где можно увидеть редких птиц, мангровые леса и песчаные дюны, а гурманы — свежайшие морепродукты на рынках Saladan и в прибрежных ресторанах.
BrightGroveHub Selection – The neat structure made exploring products quick and straightforward.
summer finds – Fast pages and tidy layout made exploring products easy.
MoonView Hub – Modern aesthetic paired with neat product presentation made browsing smooth.
look at this web-site https://ethereal.credit
view it now https://boros.cfd/
visit their website https://snake.credit
Wild Ridge Corner – Intuitive design made locating products straightforward and fast.
go to this site https://liquity.cfd
пхукет ко ланта пхукет ко ланта — путь из Пхукета к Ko Lanta обычно проходит через материковую часть и Крaби: поездка на автобусе или такси до пирса и пара на пароме на остров; общее время — примерно 4–5 часов. В высокий сезон предлагают прямые скоростные лодки из Пхукета к Ko Lanta, что сокращает время в пути до 2–3 часов, но такие рейсы зависят от погодных условий и спроса. Альтернативой служит комбинированный маршрут: Пхукет > Крaби > ко ланта на пароме или автомобиле. По прибытии можно арендовать виллу или отель у побережья и наслаждаться пляжами, рыбалкой и островной кухней.
go to this web-site https://kinetiq.buzz
ChoiceCenterHub – Very organized and easy to explore, made shopping straightforward and simple.
электрокарнизы для штор цена электрокарнизы для штор цена .
look at these guys https://liquity.cfd
important source https://etherealtrade.lat/
try this site https://prjx.online
useful link https://kinetiq.buzz
лучшие отели в Лазаревском с бассейном
useful content https://boros.cfd/
wikipedia reference https://dexrp.buzz/
Going Here https://yieldfi.pro
see https://prjx.space/
read what he said https://safeglobal.club/
visit this page https://alchemix.center/
click for more info https://kittenswap.buzz
great site https://beraborrow.cc/
check over here https://alchemix.center
click reference https://etherealtrade.xyz/
like this https://looksrare.cfd/
see post https://cakepad.digital
resource https://arch.credit/
click resources https://g8keep.org
Bonuses https://hypperswap.space/
honeststylecorner – Easy-to-navigate sections with clear listings, shopping was very pleasant.
visite site https://kittenswap.buzz
website link https://gluex.io
cloud picks hub – Fast pages and tidy layout made finding items effortless.
try this site https://navigator-exchange.org
check my reference https://unich.icu
truewavelane – Layout is tidy, navigating products is smooth and intuitive.
More Help https://rangerfinance.xyz
discover this info here https://liquity.cfd
black porno
click for more info https://boros.cfd
look at these guys https://kittenswap.cc
Savanna Selection Store – Items were well laid out, making the overall browsing experience comfortable.
you can look here https://snake.credit/
you could look here https://liquity.cfd
wild finds hub – Clear structure and responsive interface made shopping simple.
navigate to this website https://rangerfinance.xyz
additional resources https://cakepad.digital/
ModernUrbanTrends – Navigation is easy, and the product range is impressive.
reference https://ethereal.credit
best market site – The neat structure made every section easy to explore without confusion.
see this website https://navigator-exchange.org/
ShopWithJoy – Loved how easy shopping felt here, very smooth and friendly experience overall.
browse around these guys https://theo.sbs
i thought about this https://avalonfinance.cc/
трип сайт tripscan top — фраза, обозначающая раздел или концепцию, где концентрируются топовые функции, лучшие маршруты и выгодные предложения на платформе. В таких текстах описывают преимущества: быстрый поиск по множеству источников, точное сравнение, уведомления о снижении цен, персонализированные рекомендации и удобство планирования. Приводят примеры использования: планирование недельной поездки, исследование направления, сравнение вариантов перелета и добавление в календарь. Рассматривают, как система ранжирует результаты — по цене, времени в пути, количеству пересадок, рейтингу перевозчика — и какие настройки позволяют закреплять топовые направления, даты и маршруты. В SEO-части добавляются призывы к действию: зарегистрируйтесь, попробуйте поиск, получайте уведомления.
PureLeafEmporium – Love the presentation, everything feels simple, clean, and easy to navigate.
Find Out More https://unich.icu/
More about the author https://hlp0.online/
find out https://kittenswap.cc/
you could try these out https://arch.credit/
Home Page https://beratrax.org
discover here https://arch.credit/
Coastline Haven – The site is tidy, making it simple to browse items without confusion.
как добраться до ко ланты где ко ланта — географически Ко Ланта находится в Андаманском море, в юго-западной части Таиланда, в провинции Крабі, недалеко от островов Кроти и Trang. Острова Ko Lanta Yai и Ko Lanta Noi соединены мостом, а порт Saladan служит основным узлом для переправ на материк и соседние острова. Расположение в пределах крорбийской зоны делает его удобной базой для посещения местных парков, пляжей и близлежащих бухт. В окрестностях легко найти маршруты на прокат скутера или велосипеда, что позволяет исследовать побережье и заповедные тропы без зависимости от экскурсионных программ.
visit here https://avalonfinance.cv/
click to investigate https://looksrare.cfd
special info https://ethereal.credit
this https://berapaw.org/
click this https://royco.cc/
try this out https://unich.icu
Read Full Report https://hypperswap.cloud
discover this https://etherealtrade.rest
my latest blog post https://beraborrow.cc/
page https://hypperswap.space/
browse around here https://arch.credit
see here now https://hlp0.cloud/
check my source https://looksrare.cfd
harbor hub – Items loaded quickly and navigation felt effortless.
try here https://terminal.credit/
why not try these out https://kittenswap.cc
best site https://kinetiq.buzz
my review here https://alchemix.center
take a look at the site here https://hypperswap.space/
over at this website https://camelot.click/
YOURURL.com https://unich.icu/
Mountain Sage Treasures – The website layout helped me quickly locate everything I wanted.
This Site https://hyperliquid-wiki.cc
you can find out more https://hyperliquid-wiki.cv/
this website https://palladiumlabs.net/
look at this web-site https://etherealtrade.xyz/
Explore EverForest – Nice assortment, and every page popped up almost instantly.
redirected here https://daodao.cfd
discover here https://prjx.space
Visit Your URL https://hypperswap.cloud
электрические рулонные шторы на окна электрические рулонные шторы на окна .
рулонные шторы на электроприводе рулонные шторы на электроприводе .
like it https://d2finance.cv/
Visit This Link https://kittenswap.cc
my sources https://alchemix.center
tripscan top Трипскан зеркало: Альтернативный адрес сайта для доступа к нашим услугам в случае технических проблем с основным доменом.
the original source https://daodao.cfd
this website https://prjx.space
DailyInspirationHub – Encouraging content that sparks curiosity every day.
find more https://arch.credit/
useful link https://plasma.credit/
teens porno
go to this web-site https://kinetiq.lat/
you could try here https://terminal.credit
you can try these out https://unich.icu/
why not try this out https://navigator-exchange.org
click here to find out more https://hypperswap.cloud/
shop gold stream – Fast-loading pages and intuitive navigation made exploring simple.
Check Out Your URL https://prjx.space
Read More Here https://daodao.cfd
click here to investigate https://hlp0.cloud/
informative post https://hlp0.online/
go to these guys https://kinetiq.lat
why not try this out https://defi-money.cc
article source https://snake.credit/
ко ланта на карте ко ланта пляжи — Ко Ланта славится пляжами с белым песком и кристально чистой водой, где каждый найдёт свой уголок для отдыха и активностей. Long Beach (Pra Ae Beach) простирается вдоль длинной линии песка и вдоль него тянутся кафе, шатры и уютные трассы для прогулок. Klong Dao — спокойный участок пляжа, который подходит для семей и тех, кто любит плавать в спокойной воде и вечерние прогулки под пальмами. Ba Kantiang Bay — более уединённый безмятежный уголок с кручеными скалами и отличной морской атмосферой; здесь часто можно увидеть красивые закаты. Relax Bay и другие небольшие бухты на юге острова дарят спокойствие и хорошую воду для плавания и снорклинга. Вариативность пляжей позволяет выбрать место под босоногий отдых, виллу с видом на море или простые гестхаусы у воды.
browse around this site https://hyperliquid-wiki.cv/
view website https://boros.cfd
try here https://ethereal.credit/
Visit This Link https://berapaw.org
brightstoneboutique – Items are neatly categorized, making browsing simple.
he said https://alchemix.center/
read review https://etherealtrade.xyz/
Ever Crest Woods Collection – A fresh, uncluttered design made scrolling through items enjoyable.
see this site https://avalonfinance.cv/
click to investigate https://liquity.cfd
useful reference https://beratrax.org/
go to my blog https://snake.credit/
read the article https://avalonfinance.cc/
next https://royco.cc
my blog https://liquity.cfd
timber store – Products load fast and the categories are easy to navigate.
you can try this out https://ethereal.credit/
жалюзи автоматические цена жалюзи автоматические цена .
click over here https://arch.credit
pop over to this website https://cakepad.digital
dig this https://camelot.click/
latest finds – The shop has a nice, open feel and products are arranged in a very clean way.
navigate to these guys https://beraborrow.cc/
official site https://snake.credit
weblink https://palladiumlabs.net
Full Article https://beratrax.org/
пляжи ко ланты ко ланта аэропорт — на острове собственного аэропорта нет, поэтому прямого рейса сюда обычно не существует. Ближайшие крупные аэропорты — Krabi International (KBV) и Trang Airport (TST). По прибытии можно взять такси или мини-автобус к пирсу Saladan и доплыть паромом до назначения. В сезон чартеры и частные лодки иногда предлагают прямые трансферы, но чаще всего маршрут складывается из перелёта на материк и переправы на Ко Ланту. Планируйте путешествие с учётом времени на дорогу и погодные условия, особенно если вы летите в высокий сезон.
остров ко ланта пхукет ко ланта — путь из Пхукета к Ko Lanta обычно проходит через материк и Krabi: поездка на автобусе или такси до пирса и паром на остров; общее время около 4–5 часов. В пик сезона доступны прямые скоростные лодки из Пхукета к Ko Lanta, сокращающие время до 2–3 часов, но зависят от погоды и спроса. Альтернативные маршруты: Пхукет > Krabi > Ko Lanta на пароме или через Ao Nang. По прибытии можно выбрать жильё на побережье и наслаждаться пляжами и островной кухней.
advice https://kinetiq.lat
hop over to this web-site https://avalonfinance.cv/
more helpful hints https://dexrp.wtf/
Wild Meadow Picks Hub – Neat layout and clear product display made browsing simple.
Подшипники «РезиноМир»: Ваш Надёжный Партнёр в Мире Резинотехнических Изделий с 2009 Года
В современном промышленном мире, где каждая деталь имеет значение, выбор надёжного поставщика и производителя резинотехнических изделий (РТИ) является ключевым фактором успеха любого предприятия. С 2009 года компания «РезиноМир» уверенно занимает лидирующие позиции на рынке России и стран СНГ, предлагая своим B2B-партнёрам не просто продукцию, а комплексные и высококачественные решения в области РТИ. Мы гордимся тем, что являемся не просто поставщиком, а производственным партнёром, способным удовлетворить самые взыскательные требования.
Категории резинотехнических изделий, представленные в нашем ассортименте:
• Технические пластины: Исходный материал для изготовления различных прокладок, уплотнителей, настилов. Включают в себя такие виды, как ТМКЩ (тепломорозокислотощелочестойкая), МБС (маслобензостойкая), пищевая резина.
• Рукава и шланги: Широкий спектр для транспортировки жидкостей, газов, сыпучих материалов. Это могут быть рукава напорные, всасывающие, высокого давления, маслобензостойкие, антистатические и другие.
• Уплотнения и прокладки: Манжеты, сальники, кольца, грязесъемники, О-образные кольца, плоские прокладки – незаменимые элементы для герметизации соединений в различных механизмах и системах.
• Ремни приводные: Клиновые, зубчатые, плоские, поликлиновые – обеспечивают эффективную передачу крутящего момента в промышленных агрегатах.
• Формовые и неформовые РТИ: От сложных литых деталей по индивидуальным чертежам до экструдированных профилей и шнуров различного сечения.
• Виброизоляторы и амортизаторы: Элементы, предназначенные для снижения вибрации и ударов в оборудовании, продлевая срок его службы.
• Ленты конвейерные: Для транспортных систем различной сложности и назначения, включая шахтные, пищевые, морозостойкие.
• Изоляционные материалы: Диэлектрические коврики, перчатки и другие изделия, обеспечивающие безопасность при работе с электричеством.
• Защитные покрытия: Резиновые настилы, дорожки, покрытия для спортивных площадок и производственных помещений.
Наши Масштабы Говорят Сами За Себя: Инфраструктура «РезиноМира»
За более чем 15 лет на рынке промышленных РТИ, «РезиноМир» не просто накопил опыт, а создал мощную инфраструктуру, которая является гарантом стабильности поставок и безупречного качества продукции. Мы не понаслышке знаем, что значит работать с крупными промышленными предприятиями, и наша готовность к этому подтверждается следующими цифрами:
• 15 лет на рынке промышленных РТИ: Долгая история успешного сотрудничества и постоянного развития.
• Собственное высокотехнологичное производство: Позволяет нам не зависеть от внешних факторов и строго контролировать качество продукции на каждом этапе изготовления.
• 100 000 наименований товаров в наличии: Обширная складская программа гарантирует, что подавляющее большинство ваших потребностей может быть удовлетворено немедленно.
• Изготовление деталей любой сложности по чертежам: Мы готовы реализовать уникальные проекты, создавая РТИ по индивидуальным требованиям заказчика.
Что Мы Делаем Лучше Всего: Три Столпа Успеха «РезиноМира»
Наша стратегия фокусируется на трёх ключевых направлениях, чтобы обеспечить нашим клиентам максимальную ценность и комплексное решение их задач, связанных с резинотехническими изделиями:
1. Собственное Производство: Наличие собственных производственных мощностей является нашим конкурентным преимуществом. Мы обеспечиваем эталонное качество РТИ, начиная от тщательного отбора сырья и заканчивая строгим контролем готовой продукции. Это позволяет нам гарантировать соответствие всем ГОСТам и ТУ, а также оперативно реагировать на потребности рынка.
2. Нестандартные Изделия: Для решения уникальных задач вашего бизнеса мы предлагаем изготовление РТИ по чертежам, эскизам или предоставленным образцам. Это направление — наша ключевая компетенция, позволяющая создавать сложные формовые и неформовые изделия, идеально подходящие для специализированного оборудования и уникальных производственных процессов.
3. Складская Программа: Более 100 000 наименований продукции всегда готовы к немедленной отгрузке с наших современных логистических центров. Это минимизирует время ожидания и обеспечивает бесперебойную работу вашего предприятия, предотвращая простои.
Наши Производственные и Складские Мощности: Гарантия Эффективности
«РезиноМир» — это не просто торговая компания. Мы являемся полноценным производственным комплексом, чья инфраструктура полностью ориентирована на нужды вашего бизнеса. Наша материально-техническая база включает:
• Производственный цех: Оснащенный современным оборудованием, где опытные специалисты воплощают в жизнь самые сложные технические решения.
• Склад готовой продукции: Просторные и хорошо организованные склады, где хранится огромное количество наименований РТИ, готовых к быстрой отгрузке.
• Отдел контроля качества: Независимый отдел, обеспечивающий многоступенчатый контроль на всех этапах производства и отгрузки, гарантируя соответствие продукции заявленным характеристикам.
Готовы Начать Сотрудничество?
Если вашему бизнесу требуются качественные резинотехнические изделия от надёжного производителя и поставщика, «РезиноМир» готов стать вашим партнёром. Отправьте заявку через удобную форму на нашем сайте или свяжитесь с нами напрямую по электронной почте. Наш опытный технический специалист оперативно свяжется с вами, чтобы обсудить все детали вашего проекта и предложить оптимальные решения. Доверьте свои потребности в РТИ профессиона
YOURURL.com https://defi-money.cc/
he said https://boros.cfd
try this site https://kittenswap.buzz/
special info https://camelot.click/
Official Outlet – The rapid loading and intuitive categories removed all the usual search friction.
why not look here https://avalonfinance.cc
like this https://etherealtrade.rest/
her explanation https://hlp0.cloud/
Visit This Link https://kinetiq.buzz
see this website https://gluex.io/
additional resources https://royco.cc/
navigate to these guys https://alchemix.center/
investigate this site https://hyperliquid-wiki.cc/
GlobalTrendMart – Smooth checkout and excellent offers available.
pine picks hub – Fast pages and organized layout made product discovery easy.
more helpful hints https://dexrp.wtf/
her comment is here https://beraborrow.cc/
wikipedia reference https://kinetiq.lat/
have a peek at this website https://defi-money.cc
look at more info https://beratrax.org/
from this source https://boros.cfd
that site https://defi-money.cc/
this hyperlink https://etherealtrade.xyz
find here https://avalonfinance.cv/
find this https://hyperliquid-wiki.cv/
browse around this web-site https://prjx.online/
go https://plasma.credit
Homepage https://dexrp.buzz/
Maple Collective Hub – Well-arranged pages and simple menus made exploring products enjoyable.
This Site https://dexrp.buzz/
over here https://looksrare.cfd
Read Full Report https://camelot.click/
my sources https://kittenswap.buzz/
teens porno
this https://hypperswap.cloud
Read More Here https://palladiumlabs.net
her latest blog https://dexrp.wtf
click this link now https://hyperliquid-wiki.cv
Get More Info https://berapaw.org/
ролевые шторы ролевые шторы .
автоматическая рулонная штора https://www.rulonnye-shtory-s-elektroprivodom499.ru .
browse around this web-site https://arch.credit/
view it now https://hyperliquid-wiki.cv
I create step-by-step explanations for Trezor Suite, ensuring users understand every important feature. My content empowers users to secure their crypto assets independently.
trezor suite wallet
click now https://royco.cc
their website https://dexrp.wtf/
visit our website https://terminal.credit/
see page https://hyperliquid-wiki.cv/
где ко ланта Пляжи Ко Ланты — в разных участках острова можно сочетать пляжный релакс с активностями: романтические вечера у Ba Kan Tiang и Kantiang Bay, активный отдых и семейные дни на Long Beach и Klong Dao, сноркелинг и лодочные экскурсии у южных берегов к коралловым рифам. Старый город и восточное побережье предлагают не только пляжи, но и культурный опыт: рынки, кафе на набережной и возможность познакомиться с местной кухней. Инфраструктура умеренная, поэтому стоит планировать передвижения и аренду транспорта заранее — это экономит время и обеспечивает большую гибкость. Не забывайте сезонность: зима часто благоприятна для плавания и спокойной погоды, лето приносит тёплую воду, но и риск дождей.
More Info https://usdai.cloud/
content https://snake.credit
click now https://kittenswap.buzz
anchor https://dexrp.wtf/
Autumn Mist Online – The shop’s vibe felt warm, and each listing offered straightforward information.
wave picks hub – Fast pages and organized layout made finding items effortless.
he said https://snake.credit
special info https://cakepad.digital
pop over here https://avalonfinance.cc
SmartDealsOnline – Quality products with great savings, couldn’t be happier.
official source https://hypperswap.cloud
harborstylehub – Clean layout with tidy product listings, shopping was simple.
view website https://kinetiq.lat/
softleafhub – Pleasant layout, items are easy to find and browse.
use this link https://safeglobal.club
https://studhub.cz/
have a peek at this website https://palladiumlabs.net/
Your Domain Name https://beratrax.org
check this site out https://avalonfinance.cc/
recommended you read https://d2finance.cv
click this site https://alchemix.center
click here now https://kittenswap.cc/
have a peek at this site https://theo.exchange/
ExpandYourMind – Really interesting site, navigation is smooth and content feels thoughtful today.
pop over to this web-site https://etherealtrade.rest
FashionForLife – Nice shopping platform, variety is good and user interface feels polished today.
shoppe hub – Pages load quickly and browsing feels comfortable.
жалюзи с электроприводом жалюзи с электроприводом .
browse creations – Clean look, easy browsing, and products positioned beautifully across the pages.
Hi, this weekend is good in favor of me, for the reason that this time i am reading this impressive informative article here at my house.
forticlient mac download
Lunar Wood Treasures – Neat pages and visible items allowed for smooth selection.
пхукет ко ланта краби ко ланта — Ко Ланта в составе провинции Крабби на юго-западе Таиланда, и путь к нему обычно начинается с материка: Крабби Таун, Ao Nang илиTrang. Сам участок побережья привлекательной природы — скалистые виды, кристально чистая вода и длинные пляжи, где можно отдохнуть без толп туристов. Переправы до Ko Lanta Yai идут из разных портов: Ao Nang и Krabi Town, а также Trang, время в пути обычно составляет 2–3 часа в зависимости от типа переправы и погодных условий. Любители моря выбирают места для сноркелинга и дайвинга в окрестностях Ko Haa и Koh Rok, а также исследуют Mu Ko Lanta National Park с тропами к девственным бухтам и маяками. В Крабби-провинции много вариантов размещения: от простых гестхаусов до просторных резортов у океана. Долгие прогулки по пляжам, кулинарные впечатления на набережной и экскурсии к старому городу создают спокойную атмосферу для отдыха. Лучшее время — сухой сезон, когда вода прозрачна, а погода предсказуема; дождливый сезон приносит зелень и Ridge-ветра. Советы: аренда скутера — удобный способ передвигаться по острову, тщательно планируйте переправы и учитывайте погодные условия.
в каком казино дают
ко ланта пляжи Паром Ко Ланта — один из самых удобных способов попасть на остров и начать знакомство с его берегами. Основные маршруты проходят из Krabi Town, Ao Nang и Ban Saladan, с посадкой на Ko Lanta Yai; продолжительность обычно 2–3 часа, в зависимости от типа судна и погодных условий. Есть медленные паромы, которые дешевле и позволяют насладиться морскими видами, и более быстрые катеры, экономящие время, но требующие большего бюджета. В сезон монсунов расписание может меняться, поэтому рекомендуется бронировать заранее и сверять статус накануне выезда. Частные чартеры и трансферы из Krabi и Phuket тоже встречаются, особенно для групп или семей, которые хотят максимально комфортно добраться до пирсов на Ко Ланте.
moonfield picks – Smooth interface and neatly displayed products improved browsing.
black porno
DreamHavenOutlet Storefront – Nicely organized items and smooth navigation made the session enjoyable.
TrendOnlineSpot – Nice design with clear categories and smooth browsing experience.
BoundlessLearning – Inspiring ideas, feels like a roadmap for developing new abilities.
Thank You.
пхукет ко ланта как добраться ко ланта на карте — островной комплекс расположен в Андаманском море, в юго-западной части Таиланда, в провинции Крабі, недалеко от материковой части Кроти и Trang. На карте его удобно искать как Ko Lanta Yai (главный остров) с прилегающими бухтами и небольшими островками вокруг. Основные точки маршрутов — Saladan на севере и Long Beach на западе; мост соединяет Ko Lanta Yai и Ko Lanta Noi, что упрощает передвижение внутри архипелага. Используйте популярные навигационные приложения, чтобы видеть пирсы, паромы и дорожную сеть местности.
электрическая рулонная штора rulonnye-shtory-s-elektroprivodom.ru .
купить рулонные шторы в москве купить рулонные шторы в москве .
boutique corner – Well-structured layout and clear categories improved shopping.
brightoakstore – Navigation is smooth, and the layout feels welcoming and organized.
бездепозитные бонусы за регистрацию в казино
Si quieres entender mejor tus opciones terapéuticas, revisa los apartados de servicios de la Clínica de Urología Moderna.
EverHollow Bazaar Site – A fluid browsing experience, supported by categories that were clear and well-organized.
краби ко ланта как добраться пхукет ко ланта как добраться — прямых маршрутов обычно нет, чаще путь идёт через Krabi или Trang. Из Пхукета можно добраться на автобусе или самолётом в Krabi или Trang, затем пересесть на паром до Saladan на Ko Lanta Yai. Возможно подобрать прямой скоростной катер в сезон, но расписание ограничено и цена выше. Время в пути обычно 4–5 часов с учётом пересадок и ожидания. Для большего комфорта можно выбрать маршрут через Krabi: перелёт/автобус до аэропорта Krabi, затем паром до Ko Lanta.
Главная Mega ссылка
посмотреть в этом разделе Mega darknet
перейдите на этот сайт Mega онион
forest hub link – The site feels responsive and exploring items was very comfortable.
Pure Wave Choice – Really liked the smooth layout; pages opened fast and everything looked clean.
читать Мега ссылка
выберите ресурсы Мега сайт
пластиковые жалюзи с электроприводом http://www.prokarniz23.ru/ .
остров ко ланта в тайланде пхукет ко ланта — путь из Пхукета к Ko Lanta обычно проходит через материк и Krabi: поездка на автобусе или такси до пирса и паром на остров; общее время около 4–5 часов. В пик сезона доступны прямые скоростные лодки из Пхукета к Ko Lanta, сокращающие время до 2–3 часов, но зависят от погоды и спроса. Альтернативные маршруты: Пхукет > Krabi > Ko Lanta на пароме или через Ao Nang. По прибытии можно выбрать жильё на побережье и наслаждаться пляжами и островной кухней.
PureChoiceOutlet – Found nice items quickly, checkout worked flawlessly and service seems dependable.
wildgroveemporium – Items are well arranged and navigation feels intuitive — nice overall experience.
пхукет ко ланта как добраться Ко ланта на карте — чтобы найти остров на карте, ищите западное побережье Таиланда в Андаманском море, вблизи Krabi и Phuket. Основные точки на Ko Lanta Yai: Ban Saladan (пирс в северной части), Long Beach на западе, Старый город на восточном побережье, и южные бухты Ba Kan Tiang и Kantiang Bay. Карты позволяют увидеть связь с соседними островами и материком, а также выбрать удобные маршруты на паром и по острову. Рекомендуется скачать офлайн-карту для навигации во время перемещений между бухтами и пляжами.
teens porno
PerfectBuyZone – Nice layout and nice product range, overall experience was pleasant today.
узнать больше Mega darknet
Главная Mega даркнет
Главная Mega сайт
grove hub corner – Clear sections and responsive pages made exploring products simple.
перейти на сайт Mega onion
содержание Mega онион
здесь Mega онион
здесь Mega onion
другие Mega ссылка
здесь Mega даркнет
пхукет ко ланта как добраться Для любителей сноркелинга Ко Ланта и окрестности предлагают несколько отличных мест: бухты и рифы, доступ к которым удобен на лодке. Вода чистая, рыбки разнообразны, кораллы ярко-раскрашены. Лучше посещать утро, когда вода ещё спокойна и рыбы активны. Не забывайте об охране природы: не трогайте кораллы, не оставляйте мусор и уважайте правила заповедной зоны. Эти правила помогают сохранять подводный мир для будущих поколений и позволяют каждому отправиться в путешествие по ярким цветам моря
на этом сайте Мега ссылка
веб-сайте Mega сайт
кликните сюда Mega даркнет
UrbanCrest Selection – The catalog flow made shopping enjoyable and simple.
посетить сайт Mega онион
интернет Мега сайт
погода ко ланта Как добраться до ко ланты — общие принципы передвижения: чаще всего путь начинается с прилёта в Krabi (KBV) или Phuket (HKT), затем трансфер на паром до Ban Saladan или северной части Ko Lanta Yai. Можно добираться автобусом или минивэном через Krabi Town и Ao Nang, затем пересесть на паром. Альтернатива — ж/д путь до Surat Thani, затем автобус и паром; из Бангкока прямого рейса до Ko Lanta нет, поэтому маршрут требует промежуточной остановки. Вариант через Phuket тоже возможен: самолёт в Phuket, затем наземный транспорт до парома. Планируйте маршрут с учётом времени суток, погодных условий и доступности паромов.
подробнее Мега онион
ValueDealFinder – Prices were easy to compare, thanks to the well-structured presentation.
WillpowerGrowth – Inspires action and provides easy-to-follow steps.
узнать больше Mega darknet
a href=”https://pureforeststudio.shop/” />forestcraftstore – Smooth interface with neatly presented items, shopping was simple.
leafsilveremporium – Very user-friendly interface, shopping is smooth and comfortable.
подробнее Mega даркнет
ко ланта как добраться ко ланта таиланд — одно из любимых направлений на юго-западе Таиланда, расположенное у побережья Андамана и состоящее из Ko Lanta Yai и Ko Lanta Noi. Острова соединены дорогами и мостами, вдоль береговой линии — длинные пляжи, лазурная вода и спокойная атмосфера, что привлекает семьи и любителей природы. В окрестностях можно увидеть рыбацкие деревни, набережные со свежими морепродуктами и небольшие храмы. В регионе хорошо развита инфраструктура для отдыха: дайвинг-центры, лодочные туры и пешие тропы к смотровым площадкам, а климат здесь благоприятен почти круглый год.
посетить сайт Мега сайт
перейдите на этот сайт Мега даркнет
vypracovani bakalarske prace Pomoc s bakalarskou praci / Konzultace bakalarske prace / Zpracovani bakalarske prace / Teoreticka cast bakalarske prace / Bakalarska prace: Bakalarska prace predstavuje zasadni krok v akademickem zivote kazdeho studenta. Uspesne zvladnuti tohoto ukolu vyzaduje nejen hluboke znalosti v danem oboru, ale take schopnost samostatne prace, kritickeho mysleni a precizniho zpracovani informaci. Nabizime komplexni pomoc pri psani bakalarskych praci, od konzultaci a vyberu tematu, pres zpracovani resersi a teoreticke casti, az po finalni upravy a korektury.
посмотреть в этом разделе Mega сайт
tg @‌links_dealer | effective seo links for spinbetter.link
LunarBranchStore Deals – Everything was easy to locate, giving a pleasant experience.
узнать больше Mega ссылка
Explore EverWillow – Clean design and thoughtful arrangement made browsing comfortable.
посмотреть в этом разделе Мега даркнет
green harvest shop – The structure of the site made it easy to explore all sections.
здесь Мега ссылка
нажмите, чтобы подробнее Мега онион
страница Мега онион
BrightPetal Market – Easy-to-use interface and sharp images made shopping enjoyable.
Подробнее Mega сайт
Продолжение Мега сайт
ко ланте отели Kantiyang Bay (Kantiang Bay) — одно из самых живописных мест на юге Ко Ланты и среди тех уголков, где ощущаешь уединение на фоне кристально чистой воды. Здесь пляж окружён густой зеленью и скалистыми берегами, вода глубже и прозрачнее, что привлекает любителей сноркелинга и пляжного отдыха в тени пальм. Вдоль побережья размещены маленькие уютные отели и рестораны с видом на залив. Вечером здесь спокойнее, чем на центральных участках, и с высоты камней можно наблюдать за закатом, а вокруг — тишина и мягкая музыка из соседних кафе. Кантиянг Бей особенно популярен среди тех, кто ищет романтику и аутентичную атмосферу, вдали от крупных туров
Главная Mega сайт
Подробнее Mega darknet
гидроизоляция подвала цена за м2 гидроизоляция подвала цена за м2 .
гидроизоляция подвала под ключ гидроизоляция подвала под ключ .
инъекционная гидроизоляция многоквартирный дом inekczionnaya-gidroizolyacziya.ru .
нажмите, чтобы подробнее Mega ссылка
Узнать больше Mega darknet
shop wild stone – Fast-loading pages and intuitive navigation enhanced the experience.
продолжить Mega даркнет
продолжить Mega сайт
нажмите, чтобы подробнее Mega ссылка
продолжить Mega даркнет
Читать далее Mega сайт
бездепозитные бонусы за регистрацию в казино с выводом без пополнения
посмотреть на этом сайте Мега ссылка
Читать далее Мега онион
napsani bakalarske prace cena Seminarni, rocnikove a absolventske prace: Kvalitni podklady za rozumnou cenu Mimo bakalarske a diplomove prace nabizime i pomoc s vypracovanim seminarnich, rocnikovych a absolventskych praci. Zajistime kvalitni podklady, odborny styl a dodrzeni terminu. Zpracujeme temata z ruznych oboru, vcetne ceskeho jazyka a dalsich predmetu. Nabizime levne vypracovani seminarnich praci a moznost koupe jiz hotovych praci. Specializujeme se i na absolventske prace pro VOS.
wind hub – Items loaded quickly and sections were simple to explore.
такой Мега онион
веб-сайте Мега сайт
опубликовано здесь Мега сайт
Thanks , I have just been looking for info about this subject for ages and yours is the greatest I have came upon till now. But, what concerning the bottom line? Are you certain in regards to the source?
fortinet vpn
посмотреть в этом разделе Мега ссылка
бездепозитные бонусы казахстан за регистрацию в казино с выводом
посмотреть в этом разделе Мега ссылка
нажмите Mega ссылка
Перейти на сайт Mega онион
посмотреть на этом сайте Mega onion
TG @‌LINKS_DEALER | EFFECTIVE SEO LINKS FOR SPINBETTERAPP.COM
Vine Treasures Online – Pleasant experience thanks to clear menus and well-laid-out pages.
Journey Builder – Smooth experience overall; messages felt authentic and helpful.
ссылка на сайт Мега сайт
смотреть здесь Mega ссылка
deltafabricshub – Very easy to browse, products are displayed neatly and clearly.
Следующая страница Mega даркнет
нажмите, чтобы подробнее Mega ссылка
бездепозитные бонусы в казино 2025
нажмите здесь Мега сайт
Подробнее Mega ссылка
UrbanStyleDeals – Appealing fashion choices and browsing through the site was effortless.
здесь Mega даркнет
SmartLearningTools – Loved how clear and concise the lessons were.
в этом разделе Mega сайт
Soft Forest Select – Smooth browsing and tidy interface made shopping fast and simple.
веб-сайте Mega онион
MoonGrove Portal – The website looked highly polished, and browsing flowed naturally.
нажмите здесь Mega ссылка
этот контент Mega ссылка
другие Мега сайт
Перейти на сайт Mega darknet
SimpleBuyZone – Good variety available, products look interesting and site loads quickly today.
ReachHigherGoals – Pleasant browsing experience today, site feels professional and well-organized overall.
I think what you posted was very reasonable. However, consider this, suppose you wrote a catchier post title? I ain’t suggesting your information isn’t good, however what if you added something to maybe get a person’s attention? I mean %BLOG_TITLE% is a little boring. You ought to peek at Yahoo’s home page and watch how they create news headlines to get viewers to open the links. You might try adding a video or a pic or two to grab people excited about everything’ve got to say. In my opinion, it would bring your blog a little livelier.
Qfinder Pro download
Купить проект комплекса барбекю Купить порядовку печи – это получить подробную инструкцию по кладке печи своими руками. Наши порядовки содержат всю необходимую информацию для успешной кладки печи, включая схемы, размеры и перечень необходимых материалов. Это отличный вариант для тех, кто хочет сэкономить и построить печь самостоятельно.
проверить сайт Мега онион
остров краби погода автобус пхукет краби — маршрут и расписание автобусов
EverMapleCrafts Market – Everything was easy to find thanks to the straightforward structure.
Wild Spire Online – Clean design and simple menus allowed me to find items effortlessly.
Move Forward Site – It offered a clean approach and ideas that felt genuinely motivating.
пляжи краби таиланд на карте пляжи краби на карте
willowtrendstore – Clear sections with easy navigation, shopping felt natural.
Brightline Boutique – Loved how organized the pages were, made picking products quick.
StyleTrend Corner – Fresh interface and a good selection of trendy wardrobe additions.
Погрузитесь в мир азартных игр и испытайте удачу в майн дроп слот, где каждый спин может стать выигрышным!
Игровой автомат mine drop предлагает захватывающий игровой процесс, который уже успел полюбиться множеству игроков.
байки краби краби какие пляжи — перечисление лучших пляжей
GoalExplorer – Encouraging posts and the site loads quickly and easily.
BudgetFindsHub – Good deals available, site layout makes browsing easy.
ModernLookWorld – Loved the trendy pieces, smooth ordering process and great quality.
TrendyStopOnline – Loved the variety of items, browsing was smooth and hassle-free.
Silver Hollow Showcase – The overall design is sleek, and each product is accompanied by clear details.
сезон на краби когда лучше отдыхать краби на карте тайланда на русском — русская карта региона
лучшие экскурсии в Краснодарском крае
бездепозитные бонусы в казино олимп
sofitel krabi phokeethra 5 краби краби сейчас
Moonglade Treasures – Well-arranged menus allowed me to find products quickly.
GiftBrowse Center – Quick load times and straightforward layout made it enjoyable to explore.
экскурсия звездные острова краби рынок краби
читать vodkabet прямо сейчас
BrightPeak Select – Smooth browsing experience with clear images helped me pick items easily.
PineCrestModern Online Shop – Well-structured pages made moving between categories fast and easy.
Смотреть здесь водкабет
узнать больше
свежие Костанайские новости
лучшие экскурсии в Минске
квадроциклы в краби ao nang краби — Ao Nang — центральная база, множество отелей, ресторанов и туров
Urban Trend Sale – Liked the stylish finds here; pages were quick and checkout straightforward.
здесь kush казино играть
OpportunityQuest – The website showcases products nicely and loads fast.
TrendDiscoverHub – Loved the selection, browsing experience felt intuitive.
Главная
коронавирус сегодня
посетить сайт купить водительское
Подробнее vodkabet новый сайт
погода краби октябрь бунгало краби
здесь vodkabet прямо сейчас
содержание водкабет
здесь vodka bet casino
перенаправляется сюда
купить права симферополь
сюда
новости Алматы сегодня
нажмите, чтобы подробнее
новости РК на сегодня
ModernHouseStyle – Beautiful products, browsing was effortless and made decorating enjoyable.
Golden Ridge Picks – Browsing felt seamless, with a layout that made finding items easy and calming.
подробнее здесь водкабет
рейтинг игровых автоматов онлайн с хорошей отдачей
GrowAndThriveHub – Resources were easy to locate and the site was pleasant to explore.
пояснения
новости Алматы
сколько добираться от пхукета до краби рейс краби — рейсы в Krabi International Airport (KBV) из различных городов
как отыграть бонус в 1win на казино
бездепозитные бонусы за регистрацию в казино с выводом без пополнения 2025
зайти на сайт
kz новости Казахстана
Gold Shore Selection – Pleasant navigation made discovering items effortless.
Смотреть здесь водка бэт
узнать больше vodkabet
Endless Growth Ideas – The site layout is clean and finding useful information is hassle-free.
здесь vodkabet новый сайт
опубликовано здесь
возможно ли купить права
можно проверить ЗДЕСЬ
купить категорию а
autumnlookhub – Fast-loading pages with intuitive navigation, shopping felt natural.
этот сайт
новости Петропавловска СКО на сегодня
в этом разделе vodkabet новый сайт
здесь
статистика коронавируса в Казахстане
лучшие экскурсии краби погода на краби на 10 дней
веб-сайте
какие права можно купить
Перейти на сайт купить права л
подробнее водкабет
StyleChoice Hub – Quick navigation and stylish pieces made browsing very comfortable.
Следующая страница куплю российский прав
TrendDiscover – Items are well presented, and browsing experience is pleasant.
ModernTrendSpot – Wide selection and navigating the site felt intuitive.
интернет vodkabet новый сайт
расписание автобусов пхукет краби паромы краби
Home Trend Showcase – The site felt light and easy to use, making product discovery enjoyable.
продолжить vodkabet
подробнее здесь
коронавирус статистика
Подробнее
русские новости
здесь
новости Жамбылской области на сегодня
подробнее
коронавирус на сегодняшний день
найти это
новости час назад
Источник
новости Карагандинская обл
смотреть здесь водка бет
узнать больше
читать новости
SunlitValleyMarket Online Shop – Well-laid-out sections and clear visuals made browsing enjoyable.
выберите ресурсы vodka bet casino
королевская резиденция краби посещение краби сезон для отдыха — пиковый сезон и периоды меньшей загрузки
новые бездепозитные бонусы в казино за регистрацию с выводом без пополнения
зайти на сайт
коронавирус новости
найти это где можно купить водительское
читать
коронавирус на сегодняшний день
ссылка на сайт казино куш
другие
купить права самара
Soft Pine Marketplace Online – Clear structure and intuitive menus made browsing effortless.
зайти на сайт водка бет
Soft Summer Page – Gentle theme and smooth browsing created a calm, user-friendly experience.
Смотреть здесь водка бет
DailyLearningCenter – Content was interesting and pages loaded fast without any confusion.
краби krabi остров краби пляжи
SkyBlossomCorner – Definitely worth a look, nice products and smooth browsing throughout today.
сайт
новости кз сегодня
такой vodkabet
другие водка бет
TrendSpot – Great layout and browsing through pages was seamless.
Adventure Hub Online – Easy to browse with a good mix of exciting products throughout.
ShadyLaneShoppe – Found what I needed easily, site structure is organized and intuitive.
выберите ресурсы
Карагандинские новости сегодня
перейти на сайт водка бет
ChicTrendSpot – Products look attractive, moving through the site was smooth.
перейдите на этот сайт
коронавирус ситуация на сегодня
узнать больше Здесь водка бет
проверить сайт водка бет
сколько лететь из дубая до краби остров хонг краби таиланд
подробнее водка бэт
TrendMode Collection – Stylish selections offered, and everything seemed to load instantly.
узнать больше vodka bet vodkabet
ссылка на сайт vodkabet
посмотреть в этом разделе купить права ижевск
этот сайт
купить права в тюмени
Узнать больше kush казино играть
Finally found a comprehensive guide on this!
лангкави краби как добраться краби где лучше остановиться
пояснения
купить права на машину
можно проверить ЗДЕСЬ vodkabet
перенаправляется сюда
статистика коронавируса в Казахстане
опубликовано здесь vodkabet новый сайт
в этом разделе водкабет
Смотреть здесь
купить права c
отдых на краби отзывы туристов отели краби таиланд с собственным
DailyShopCorner – Clean and tidy design, easy to move through pages.
проверить сайт
новости нурсултана на сегодня
узнать больше сколько стоит купить водительские права
рейтинг онлайн игровые автоматы с хорошей отдачей
nobleartstore – Fast-loading site with neat product sections, picking items was simple.
a href=”https://evertrueharbor.shop/” />EverTrue Browse – A well-organized website that made exploring quick and uncomplicated.
Источник куплю права
тайланд остров краби отели что посмотреть на краби в тайланде
BrightPineFields Choices – The selection and layout worked well together for easy navigation.
What a well-articulated point! You’ve got me thinking.jilidemo
QuickDiscover – Items are varied and the overall experience is smooth.
Trendy Picks Store – Had a good experience overall; the site ran efficiently with no hiccups.
ChicUrbanVault – Great selection of products, moving through pages felt effortless.
DiscoverSmartly – Found some good info and appreciated how intuitive the pages felt.
спа краби краби купить
Top Style Collection – Simple, stylish layout that keeps navigation fluid and shopping comfortable.
CreativeValueHub – Pleasant shopping vibe, products look good and browsing was enjoyable overall.
как добраться до краби райли краби
посмотреть в этом разделе кракен ссылка
бездепозитный бонус за регистрацию в казино с выводом денег без первого депозита
посетить веб-сайт kraken ссылка зеркало
BrightStyleCollection – Loved the stylish items, site feels modern and browsing was smooth.
подробнее omg tg
нажмите здесь ссылка на омг омг рабочая
https://rti-land.ru/ «РезиноМир»: Ваш Надёжный Партнёр в Мире Резинотехнических Изделий с 2009 Года В современном промышленном мире, где каждая деталь имеет значение, выбор надёжного поставщика и производителя резинотехнических изделий (РТИ) является ключевым фактором успеха любого предприятия. С 2009 года компания «РезиноМир» уверенно занимает лидирующие позиции на рынке России и стран СНГ, предлагая своим B2B-партнёрам не просто продукцию, а комплексные и высококачественные решения в области РТИ. Мы гордимся тем, что являемся не просто поставщиком, а производственным партнёром, способным удовлетворить самые взыскательные требования.
узнать больше Здесь кракен даркнет ссылка
Подробнее здесь сайт kraken onion
Подробнее ссылка на блэк спрут телеграм
тайны краби экскурсия остров краби таиланд на карте — карта островов Krabi
перенаправляется сюда kraken ссылка зеркало
можно проверить ЗДЕСЬ kraken ссылка зеркало
этот контент ссылки на блекспрут
перейдите на этот сайт https://kra46att.at
узнать сайт kraken darknet
Подробнее здесь kraken darknet
посмотреть в этом разделе блэкспрут официальный
Главная kraken darknet ссылка
Продолжение omg ссылка рабочая
Подробнее кракен ссылка зеркало
здесь ссылка на омг
этот сайт омг площадка торговая ссылка
FreshDailyItems – Good variety of products, simple browsing experience.
Узнать больше мега мориарти официальный
кликните сюда kraken ссылка зеркало
StyleHunt – The range of items is impressive and the site loads fast.
рыбалка на краби Москва краби тайланд — маршрут и советы
Urban Wild Grove Highlights – Tidy layout and modern aesthetics helped make exploring the shop easy.
веб-сайте kraken ссылка зеркало
написание курсовых работ на заказ цена https://www.kupit-kursovuyu-22.ru .
Подробнее kraken как зайти на сайт
Lifestyle Goods Outlet – The catalog is diverse, and everything displayed without issues.
GlobalStyleOutlet – Items look great and moving through pages was intuitive.
Главная ссылка на omg omg
каталог kraken darknet market
Источник сайт кракен тор
смотреть здесь кракен онион зеркало
нажмите здесь kraken маркетплейс зеркало
веб-сайте магазин мега мориарти
Bright Select Store – The collection is nicely curated and the site loads quickly throughout.
кликните сюда кракен ссылка onion
Casos reales, soluciones reales para mujeres que aman demasiado https://lasmujeresqueamandemasiadopdf.cyou/ las mujeres que aman demasiado pdf patricia faur
подробнее kraken онион
посетить сайт кракен даркнет маркет
другие kraken зеркало
этот контент kraken darknet ссылка
BrightMountainMall Hub – The overall design made exploring the products feel relaxed.
узнать blacksprut com
посмотреть на этом сайте kraken darknet
вьетнам краби пхукет пхи пхи краби
Источник kraken зеркало
azino777 официальный сайт вход Азино 777 – это популярная онлайн-платформа, предлагающая широкий выбор азартных игр, включая игровые автоматы, карточные игры и рулетку. Пользователям доступны как бесплатные демо-версии, так и игры на реальные деньги.
What a information of un-ambiguity and preserveness of precious know-how regarding unpredicted feelings.
netextender download for mac
найти это kraken сайт зеркала
Защищенная площадка кракен darknet использует одноразовые серверы для критических компонентов и регулярную ротацию онион адресов для предотвращения долгосрочного отслеживания.
IdeaInspireCenter – Great collection of creative concepts, browsing felt effortless and enjoyable.
азино 777 официальный сайт казино Azino777 – это популярная онлайн-платформа, предлагающая широкий выбор азартных игр. Здесь вы найдете как классические слоты, так и современные игровые автоматы, а также настольные игры и другие развлечения. Azino777 стремится обеспечить удобный и безопасный игровой процесс для своих пользователей.
https://linktr.ee/betstorm1
кликните сюда kraken сайт
такой как зайти в кракен
такой мега маркетплейс ссылка
lucky jet демо игра помните: эти тексты сгенерированы на основе ваших ключевых фраз и предназначены лишь для информационных целей. Реальная игра связана с риском; играйте ответственно и не ставьте больше, чем можете позволить себе потерять.
посмотреть в этом разделе актуальное зеркало мега мориарти
продолжить kraken darknet
такой ссылка омг
азино 777 официальный Азино 777 – это популярная онлайн-платформа, предлагающая широкий выбор азартных игр, включая игровые автоматы, карточные игры и рулетку. Пользователям доступны как бесплатные демо-версии, так и игры на реальные деньги.
azino777 официальный сайт мобильная Азино 777 известно своим разнообразным игровым ассортиментом и удобным интерфейсом. Платформа предлагает как классические слоты, так и новинки от ведущих разработчиков. Здесь каждый найдет игру по душе.
Читать далее кракен darknet
Прибор ночного видения пнв-10т Микро телефоны Fly Phona Zanco Bar — миниатюрные наушники и микрофоны, которые иногда ассоциируются с скрытым прослушиванием или мошенническими схемами. Их использование в незаконной деятельности недопустимо и может повлечь уголовную ответственность. Если цель — безопасность и конфиденциальность, выбирайте открытые и прозрачные решения, используйте надлежащие согласования и соблюдайте закон.
казан мангал порядовка порядовка кирпичной печи — порядовка кирпичной печи даёт чёткую последовательность кирпичной кладки, что важно для теплоёмкости и долговечности конструкции. Важна точность швов, равномерность прогрева и герметичность швов, чтобы избежать потерь тепла и риска возгорания. Такой порядовочный документ требует профессионального контроля и адаптации под условия конкретного объекта.
сюда kraken онион
узнать больше ссылка на кракен тор
в этом разделе kraken darknet ссылка
посмотреть в этом разделе блэк спрут зеркало рабочее
на этом сайте блэк спрут ссылка
Смотреть здесь omg актуальная ссылка
нажмите здесь кракен ссылка
ссылка на сайт ссылка на омг
этот контент kraken darknet
Продолжение kraken onion
выберите ресурсы mega mori
перейдите на этот сайт ссылка на омг рабочая
goldentrendshop – Smooth layout with well-presented products, shopping was easy.
азино 777 официальный сайт казино Ищете место, где можно весело провести время и попытать счастья? Загляните на Азино 777! Вас ждут любимые игровые автоматы, азартные игры и шанс сорвать куш. Присоединяйтесь к тысячам игроков уже сегодня!
Следующая страница kraken даркнет
здесь кракен онион зеркало
курсовая заказать http://kupit-kursovuyu-22.ru/ .
записаться обучение диспетчера грузоперевозок курс трак диспетчера онлайн в америке онлайн с практикой
FreshFashionFinds – Trendy selections, moving between pages felt effortless.
другие omg зеркала
такой кракен даркнет
кликните сюда кракен onion сайт
PersonalGrowthVault – Inspiring reads and moving through pages was effortless.
Happy Value Market – The pricing looked fair, and navigating the shop was quick and easy.
перейдите на этот сайт ссылка omg
Подробнее здесь kraken актуальные ссылки
ссылка на сайт mega22 мориарти
Quiet Plains Collection – Nice, calming interface with smooth access to all product sections.
подробнее омг площадка торговая ссылка
посетить веб-сайт кракен онион
взгляните на сайте здесь кракен darknet
обмазочная гидроизоляция цена обмазочная гидроизоляция цена .
YourDailyFinds – Well-organized pages, browsing was simple and enjoyable.
BlueHarbor Bloom Market – The loading was seamless, and the way items were displayed looked polished.
ремонт бетонных конструкций нижний новгород ремонт бетонных конструкций нижний новгород .
экскаватор погрузчик москва экскаватор погрузчик москва .
гидроизоляция подвала проникающая http://www.gidroizolyacziya-podvala-samara.ru .
ссылка на сайт сайт kraken darknet
узнать больше Здесь кракен тор
Следующая страница кракен онион
акрилатная инъекционная гидроизоляция http://inekczionnaya-gidroizolyacziya.ru/ .
узнать больше ссылка omg!omg!
lucky jet 1win играть лаки джет — это альтернативное написание названия игры, встречающееся в поиске и чатах игроков. Среди ключевых тем часто встречаются стратегии лаки джет и сигналы лаки джет, которые игроки обсуждают в чатах и форуме. Важно помнить: независимо от варианта написания, цель остаётся одной — поймать момент максимального вывода и минимизировать риск. Чтобы узнать, где играть лаки джет, ищите лаки джет официальный сайт или лаки джет 1win сигналы, а также ознакомьтесь с лаки джет демо и лаки джет онлайн версиями. В любом случае выбор платформы должен основываться на лицензии, прозрачности выплат и репутации.
заказать проект каминопечи печи Купить проект мангала с казаном — проект мангала с казаном фокусируется на организации пространства под жарку на открытом огне и приготовление блюд в казане: проект должен учитывать теплоотвод, герметичность и удобство доступа к топке. Важно предусмотреть устойчивую подставку, защиту от возгорания и возможность регулирования жара. Такой проект обычно соединяется с системой вентиляции и безопасностью использования над открытым огнем. Подход к проектированию должен соответствовать нормам пожарной безопасности и требованиям экологической ответственности. Это обеспечивает комфорт и безопасность во время кулинарных занятий на улице.
гидроизоляция подвала москва гидроизоляция подвала москва .
на этом сайте ссылка омг
этот сайт omg omg ссылка на сайт
Uwielbiasz hazard? https://online-nv-casino.com: rzetelne oceny kasyn, weryfikacja licencji oraz wybor bonusow i promocji dla nowych i powracajacych graczy. Szczegolowe recenzje, porownanie warunkow i rekomendacje dotyczace odpowiedzialnej gry.
проверить сайт сайт kraken darknet
онлайн обучение диспетчера грузоперевозок в америке онлайн для начинающих цена курса диспетчера грузоперевозок в сша онлайн с реальными кейсами
опубликовано здесь blacksprut com
нажмите kraken onion
выберите ресурсы kraken ссылка тор
перенаправляется сюда кракен онион
проверить сайт блекспрут вход 2025 сентябрь
Читать далее kraken сайт
такой омг ссылка
здесь kraken даркнет
ModernDealsOutlet – Products displayed neatly, and navigating the site was simple and pleasant.
Подробнее mega darknet
подробнее здесь kraken ссылка
Смотреть здесь kraken маркетплейс
Pure Harbor Selection – Well-structured pages and intuitive navigation helped me browse quickly.
курс трак диспетчера в сша в сша онлайн с трудоустройством планирование маршрутов
DiscoverValue – Good selection, pages load quickly and browsing was very easy.
https://lucky-jet333.ru/ lucky jet 1win casino — сочетание Lucky Jet и 1win casino часто обсуждается в контексте интеграции игр и бонусов. Игроки ищут lucky jet 1win казино, чтобы воспользоваться удобными платежами и быстрыми выводами. Важно проверять легальность, рейтинг платформы и отзывы других пользователей. При выборе 1win для lucky jet онлайн позаботьтесь о безопасности транзакций, а также об ограничении по ставкам и ответственном отношении к игре. Также можно изучать lucky jet демо и lucky jet бонусы, чтобы понять, какие возможности предлагает площадка.
Заказывали изготовление папок с логотипом и получили отличный корпоративный материал. Печать четкая, логотип выглядит насыщенно и аккуратно. Папки прочные и не деформируются. Сотрудники быстро реагировали на правки и пожелания. Очень рекомендуем – заказать каталоги
Fashion Corner Online – Clean layout and stylish pieces made browsing a pleasant experience.
лучшие соковыжималки
маг дота 2 – читы дота команды, metaskins подписка
топ 1 дота 2 – винрейт героев дота 2, таблица ммр дота 2
Rainforest Goods Online – Pages loaded quickly and the layout made exploring the catalog a breeze.
дота 2 2025 – dota 2 auto gladiators, кинг дота 2
Trend & Buy Picks – Products displayed nicely, navigation was quick and simple.
dota cheats – metaskins подписка, чит melonity
гидроизоляция подвалов цена https://gidroizolyacziya-czena1.ru .
dota 2 drow – dota 2 changer, dota 2 dream
экскаватор погрузчик jcb аренда москва http://www.arenda-ekskavatora-pogruzchika-5.ru .
umbrella чит дота – metaskin dota, лина дота 2
overplu – скачать дота 2, dota кастомные скины
melonity настройки – umbrella v2 dota 2, dota 2 dotabuff
купить скины дота – бесплатный скинченджер дота 2, джаггернаут дота 2
курсы трак диспетчера онлайн стоит ли идти курс трак диспетчера онлайн для иммигрантов в сша
инъекционная гидроизоляция частный дом inekczionnaya-gidroizolyacziya.ru .
dota 2 dawnbreaker – дота амбрелла бесплатно, melonity 2
лавка дота 2 – амбрелла dota, купить аккаунт с дотой 2
melonity spoofer – дота 2 вк, дота 2 кез
гидроизоляция подвала гарантия http://gidroizolyacziya-podvala-samara.ru .
ремонт бетонных конструкций усиление ремонт бетонных конструкций усиление .
ремонт подвала ремонт подвала .
overplus промокод – карта дота 2, запуск доты 2
обновление дота 2 – новый герой дота 2, collector shop dota 2
скачать оверплюс – melonity crack, couldn t receive valid resp overplus
матчи дота 2 – чит melonity, где продать скины дота
продажа скинов дота 2 – кейсы со скинами дота 2, купить скины дота 2 маркет
umbrella не запускается dota 2 – амбрелла купить дота 2, dota 2 купить
оверплюс скинченджер дота 2 – дота 2 кез, wrong build overplus
TrendMarketSpot – Well-structured pages, modern appearance, very user-friendly.
нова дота 2 – дота 2 скрытое, cfg umbrella dota 2 v2
lucky jet игра 1win lucky jet ввод — вход в систему и доступ к функциям платформы обычно начинается с регистрации на lucky jet сайт и подтверждения личности. Вход в lucky jet онлайн позволяет перейти к играм, пополнению счета и выводу средств. Перед входом убедитесь, что сайт и приложение безопасны, используйте сложные пароли и включите двухфакторную авторизацию, чтобы защитить свой баланс. Если вы ищете lucky jet официальный, убедитесь, что ссылка ведёт на лицензированную площадку. После входа можно открыть lucky jet демо или начать ставки на деньги, в зависимости от ваших целей и бюджета.
dota 2 pro tracker – melonity spoofer, чит амбрелла дота 2
читать kraken сайт зеркала
как найти первых клиентов на диспетчинг в этом году доход диспетчера грузоперевозок в сша
лучшие одеяла
другие kraken ссылка зеркало
BrightGiftCorner – Lovely gift options here, browsing felt easy and site looks inviting.
CozyCornerShop – Items are displayed nicely, and moving around the site is smooth.
orchardstyleemporium – Clear sections with organized products, shopping was simple.
UniqueGiftCollection – Excellent variety available, navigation was simple and overall browsing felt smooth.
другие kraken сайт зеркала
лаки джет 1win скачать lucky jet игра — это современный онлайн-авиатор в формате краш-игры, где игрок делает ставку и наблюдает, как растет множитель во время полета самолета. В процессе раунда множитель увеличивается, и задача игрока — вовремя зафиксировать выигрыш нажатием кнопки вывода. Если игрок успевает — ставка умножается на текущий коэффициент; если же самолёт «берёт» слишком высокий темп и рушится, ставка сгорает. Такой принцип создаёт динамичный и напряжённый геймплей, который привлекает пользователей как новичков, так и опытных игроков. В основе лежит RNG, и каждый раунд может быть независимым от предыдущего; площадки чаще всего подчёркивают честность механики и прозрачность расчётов. Lucky jet доступна как для игры на реальные деньги, так и в демо-версии, что позволяет без риска изучить логику раундов, статистику и поведение множителя. В разных платформах встречаются версии под « lucky jet online», а также версии, интегрированные в сайты 1win и на официальных ресурсах лаки джет. Впрочем, не забывайте: это азартная игра с высокой волатильностью, и ключевые принципы — это скорость реакции, контроль бюджета и ответственная игра. Всегда помните об ограничениях и риске потери средств; разумное распоряжение банкроллом и установка лимитов помогают сохранить удовольствие от игры без перерасхода.
TrendLoversHub – Quick shipping, the stylish products exceeded my expectations.
стоимость курса трак диспетчера для русскоязычных школа трак диспетчинга в сша с реальными кейсами
StyleHub Online – Enjoyed checking out the collection; everything was laid out clearly.
TAB Online Store – Loved the mix of items, browsing experience was very straightforward.
Ваш проводник в мир профессионального тату. Широкий ассортимент оборудования от ведущих мировых производителей. Машинки, блоки питания и средства ухода по честным ценам. Гарантия качества для вашей уверенной работы. Выбирайте лучшее! https://tattoomario.ru/
Rainy City Outlet – Enjoyed the calm look of the site and the steady flow between pages.
гидроизоляция подвала снаружи цены https://gidroizolyacziya-czena1.ru/ .
гидроизоляция инъектированием гидроизоляция инъектированием .
подвал дома ремонт http://www.gidroizolyacziya-podvala-iznutri-czena.ru/ .
онлайн обучение диспетчера грузоперевозок по всему миру для начинающих сколько зарабатывает truck dispatcher после курса
Visit SoftGroveCorner – Navigation felt effortless and the pages were simple to explore.
усиление проемов усиление проемов .
Silver Garden Finds – Fast and consistent performance gave the store a professional and reliable feel.
Vavada gaming club offers convenient navigation and quick game search by categories. Current Vavada mirrors for access are posted at https://museo.precolombino.cl/ with instructions. Newcomers to Vavada get welcome bonuses and free spins upon registration. Vavada support service works around the clock and helps solve any issues. Players value stable Vavada operation and fast payouts.
StrengthPath – Clean layout, inspiring resources, and easy browsing.
HomeComfortFinds – Great range of products, and browsing experience is smooth.
сайт кракен onion сайт
веб-сайт kraken ссылка на сайт
сайт kraken onion
Trend Essentials Store – Easy navigation and plenty of appealing modern finds available.
FreshToday Hub – Nicely arranged items with quick navigation that makes scrolling effortless.
этот контент кракен darknet
TopSelectionStore – The collection is diverse and very helpful for picking the right items.
Trend Buy Hub Online – Loved the modern layout, exploring items felt easy and quick.
Flora Boutique Online – Beautiful greenery-themed products and a stable browsing experience.
этот сайт kraken darknet
Ik kom zeker terug voor meer van dit soort content.
услуга усиления проема https://usilenie-proemov2.ru .
DiscoverEndlessGrowth – Positive vibe throughout, pages load fast and browsing experience feels smooth.
Timber Path Store Site – The layout felt neat and logical, with categories easy to explore without hassle.
v
DiscoverAmazingDeals – Very happy exploring this site, layout feels neat and organized well.
курсовые купить http://kupit-kursovuyu-21.ru .
сколько стоит заказать курсовую работу http://www.kupit-kursovuyu-23.ru .
помощь курсовые http://www.kupit-kursovuyu-22.ru/ .
FreshItemsCorner – Well-laid-out pages, smooth flow, and products easy to find.
TSZ Trend Corner – Stylish items showcased well, exploring the site felt seamless.
melbet online betting
Платформа Melbet
даёт прямой доступ к
полной линейке
прематчевой линии
и онлайн-Live рынка,
предлагающих
широкий набор видов спорта
— начиная с футбола и тенниса
до хоккея, баскетбола, киберспорта,
а также виртуальных турниров.
Помимо спорта,
игрокам доступны
современные слоты,
различные типы рулетки,
онлайн-блэкджек
и телешоу-игры с живой студией.
Новички могут активировать
стартовый бонусный комплект,
который включает
расширенный бонус при первом депозите
и бесплатные вращения.
Благодаря этому старт становится значительно проще
и протестировать дополнительные слоты.
Чтобы обеспечить комфорт
Melbet предлагает
мобильные приложения,
операторов, доступных всегда,
а также
оперативные выплаты
в максимально короткое время.
Поэтому платформа является удобным выбором
как для
спортивного беттинга,
так и для
онлайн-развлечений.
LineSelect Hub – Neat product display today, and moving through sections felt easy.
Doceniam strukturę i organizację twoich treści.
PureHarborStudio Goods – Pages loaded fast, and the product layout was very user-friendly.
SimpleTradeSpot – Fast delivery and seamless navigation, I’ll definitely return for more.
Источник kraken актуальные ссылки
Find Fresh Today – The layout is well-organized and everything loads quickly for easy browsing.
этот контент kraken зеркало
другие сайт kraken onion
ExploreOpportunities Shop – Clear categories with responsive pages made exploring effortless.
ModernChic – Clean layout and fast pages make exploring trendy items easy.
проверить сайт кракен darknet
Shop EverNova – I liked the stylish design, and the whole browsing experience felt effortless.
усиление проёмов под панорамные окна usilenie-proemov2.ru .
TCC Shop Online – Plenty of choices with a clean interface, navigation was easy.
нажмите здесь платёжные решения для форекс
этот сайт Платёжное решение для гемблинг
Il tuo blog è un tesoro di informazioni utili.
выберите ресурсы аренда авто минск краткосрочная
RiverLeaf Picks – A tidy layout and responsive design made exploring the store fun.
узнать косметика из кореи оригинал
такой аренда авто минск минивэн
Узнать больше процессинг под ставки и казино
web link https://lumi-wallet.io
Узнать больше аренда авто минск центр
пояснения корейский уход пошагово
выберите ресурсы аренда авто минск краткосрочная
Главная RU p2p процессинг
этот контент корейская косметика
GlobalGiftsSpot – Clear layout, seamless browsing, and neatly organized products.
посетить сайт antminer l9
Смотреть здесь Платёжка под adult
смотреть здесь скинву официальный сайт
зайти на сайт Russian high-risk Payment System
этот контент корейская уходовая косметика
подробнее здесь где купить корейскую косметику
страница аренда авто минск седан
опубликовано здесь косметика из кореи с доставкой
выберите ресурсы Платёжка под форекс
найти это лояльный эквайринг для iGaming
на этом сайте оригинальная косметика из кореи
такой antminer s21
выберите ресурсы корейская косметика купить
GreenChoiceOnline – Excellent assortment and very intuitive layout, shopping was effortless.
перейдите на этот сайт аренда авто минск на неделю
подробнее лучшая корейская косметика для лица
проверить сайт аренда авто минск долгосрочная
Vavada platform offers a convenient game search system by providers and categories. At https://museo.precolombino.cl/ you’ll find working Vavada addresses and bonus codes. Account funding at Vavada is available through multiple payment systems. The Vavada mobile version works stably on all modern devices. Players note high Vavada service quality and game fairness.
посмотреть в этом разделе аренда авто минск на выходные
каталог корейская косметика отзывы
посмотреть на этом сайте майнинг
выберите ресурсы аренда авто минск цены
в этом разделе аренда авто минск ж/д вокзал
Главная косметика из кореи
каталог уходовая косметика для лица
можно проверить ЗДЕСЬ аренда авто минск скидки
этот контент Платёжка под adult
проверить сайт корейский уход 10 шагов
FreshTrendCollection – Pleasant browsing experience, products arranged well and site feels organized overall.
веб-сайте корейская косметика казань
посмотреть в этом разделе Russian high-risk Payment System
кликните сюда аренда авто минск внедорожник
здесь уходовая косметика корейская
нажмите, чтобы подробнее Платёжка под гемблинг
Opportunities Online Hub – Smooth navigation and well-structured content for effortless browsing.
Подробнее стабильный платёжный шлюз под СНГ
Visit Your URL https://jaxxwallet-web.org/
подробнее здесь аренда авто минск район
нажмите, чтобы подробнее косметика из кореи интернет магазин
Modern Trend Store – The site feels fresh, with well-arranged items and effortless browsing.
TimelessFinds – Smooth browsing experience with stylish items clearly displayed.
stylestore – Quick to find what I wanted, the site is very tidy.
FreshStyleBoutique – Lovely boutique items, site feels modern and browsing was smooth today.
hop over to this site https://web-breadwallet.com/
visit the website https://lumi-wallet.io
you can try these out https://web-breadwallet.com/
pop over to this site https://jaxxwallet-web.org/
Trend Collection Hub Online – Trendy items displayed clearly, navigating the site was easy.
Home Trend Showcase – The site felt light and easy to use, making product discovery enjoyable.
go to this web-site https://jaxxwallet-web.org/
TrendyHomeFinds – Organized pages, easy navigation, and modern home items.
отзывы hstq VPS хостинг (Virtual Private Server) – это компромисс между виртуальным хостингом и выделенным сервером. Он предоставляет больше ресурсов и гибкости, чем виртуальный хостинг, но дешевле и проще в управлении, чем выделенный сервер. VPS идеально подходит для сайтов и приложений, требующих большей мощности и контроля, чем может предложить виртуальный хостинг, но не настолько больших, чтобы оправдать затраты на выделенный сервер.
CityPickHub – Checkout was quick, browsing simple, very impressed overall.
Hello
https://zasvoih.ru/
aviator game online offers an exciting experience and the opportunity to win real money directly from your device.
The thrill of watching the multiplier climb can be exhilarating.
Collective Style Store – The pages loaded smoothly, and finding stylish outfits was simple.
Je reviendrai certainement pour plus.
MetroVault – Smooth interface with attractive urban products throughout.
Recommended Reading jaxx liberty wallet
this content jaxx wallet
go now jaxx app
TDP Shop Online – Plenty of deals available, browsing through sections was seamless.
advice jaxx liberty wallet
have a peek at this site https://web-breadwallet.com/
check over here jaxx app
resource jaxx liberty wallet
next page download jaxx wallet
Modern Living Deals – Nice assortment of home items with an easy flow through each category.
news download jaxx wallet
Motivation Central – Inspiring pages, easy to navigate, and neatly structured sections.
i thought about this download jaxx wallet
click for source jax wallet
hop over to this site jaxx liberty
Going Here download jaxx wallet
check these guys out jaxx app
Discover More Here jax wallet
important site jaxx liberty wallet
click here now https://jaxxwallet-web.org
Web Site jaxx wallet
Sunrise Trail Picks – Simple navigation and organized product sections make exploration effortless.
check this site out jax wallet
хостинг vps Отзывы о HSTQ, как о любом другом хостинг-провайдере, могут быть разными. Важно учитывать, что каждый клиент имеет свои уникальные потребности и ожидания. Поэтому, изучая отзывы, обращайте внимание на общие тенденции и сопоставляйте их со своими требованиями к хостингу.
look what i found jaxx liberty
my site jaxx liberty
Click Here jaxx liberty wallet
FuturePath Finds Lane – Clean marketplace layout with clearly displayed products enhances the experience.
Limitless Growth Guide – The interface is intuitive and the pages display content effectively.
FashionLovers Online – Navigation felt effortless and the display of items was clean and appealing.
TG @‌LINKS_DEALER | EFFECTIVE SEO LINKS FOR AVIATOR.COM.IN
GlowFinder – Easy browsing experience and stylish products displayed neatly.
the original source https://web-breadwallet.com
goldenlookhub – Pages are tidy and easy to explore, made shopping simple.
UniqueGiftSpot – Clean pages, easy-to-browse layout, and creative selection.
look at more info https://web-breadwallet.com/
TFC Trend Store – Loved the product selection, browsing felt natural and smooth.
Das hat Fragen beantwortet, von denen ich nicht wusste, dass ich sie hatte.
you can find out more https://jaxxwallet-web.org/
yourdealhub.shop – Smooth checkout process, everything is fast and works without issues.
read https://jaxxwallet-web.org/
yourdailyvalue.shop – I always find unique items, shipping is surprisingly fast too.
her latest blog https://web-breadwallet.com
Urban Fashion Spot – Pages load quickly, and the stylish selection is showcased clearly.
tg @‌links_dealer | effective seo links for 888-starz.pl
Growth Explorer Hub – Well-organized sections and smooth transitions make it enjoyable to browse.
Future Finds Hub – Clean interface and modern marketplace design enhance browsing.
CityVault – User-friendly interface and clearly organized items for quick browsing.
Value Choice Store – Everything opened fast, and the listings seemed practical and budget-friendly.
содержание водка бэт
нажмите здесь водка бет
узнать больше водкабет
найти это водка бет
подробнее куш казино официальный
посмотреть на этом сайте vodkabet
такой kush casino
зайти на сайт vodka bet
перейти на сайт kush casino
продолжить куш казино играть
здесь водка бет
Bitcoin halving events Monitoring leverage and margin requirements provides crucial context for risk assessment.
лучшие реноваторы на AliExpress
BrookCoastalHub – Clean interface with an organized product layout, making browsing comfortable.
опубликовано здесь vodka bet
содержание водка бет казино
каталог казино хани мани
веб-сайт vodkabet
Trend Life Picks Hub – Loved the clean design, navigation felt easy and fast.
Читать далее kush casino зеркало
Grand River Collection Hub – River-inspired items showcased beautifully, browsing feels effortless and pleasant.
смотреть здесь водка бэт
ссылка на сайт вотка бет
Главная куш казино официальный
нажмите здесь водка бет
смотреть здесь vodkabet
здесь vodkabet
нажмите здесь зеркало водка бет
перейдите на этот сайт зеркало vodka bet
проверить сайт vodka bet casino
DealsFinderOnline – Minimalistic design, easy-to-find deals, and enjoyable shopping experience.
здесь куш казино играть
нажмите здесь хони мони
Sunrise Trail Hub – Cleanly structured pages with simple navigation make browsing products easy.
ссылка на сайт kush casino
Смотреть здесь водка бет казино
на этом сайте vodkabet
сайт водка бет казино
взгляните на сайте здесь vodka bet casino
можно проверить ЗДЕСЬ водкабет
Подробнее vodka bet casino
teen porno
нажмите здесь хани мани казино официальный сайт
другие vodka bet
Читать далее kush casino зеркало
Перейти на сайт вотка бет
Смотреть здесь водка бет казино
нажмите vodka bet casino
нажмите здесь kush casino зеркало
взгляните на сайте здесь зеркало водка бет
опубликовано здесь vodka bet casino
Подробнее казино хани мани
нажмите здесь куш казино играть
каталог вотка бет
веб-сайт водкабет
здесь казино куш
узнать kush casino
узнать vodka bet casino
этот сайт vodka bet casino
посетить веб-сайт вотка бет
посетить веб-сайт vodka bet casino
подробнее vodka bet
веб-сайт водкабет
веб-сайте казино куш
перейдите на этот сайт vodkabet
этот контент водкабет
здесь vodkabet
выберите ресурсы водка бэт
веб-сайт куш казино играть
найти это водка бэт
Источник vodka bet
Продолжение зеркало vodka bet
Horizons Guide – Easy-to-read layout and the information provided real value.
на этом сайте vodkabet
опубликовано здесь vodka bet casino
oldtownstylehub.shop – Items look great, site navigation is smooth and very user-friendly.
здесь водкабет
VioletTrendVault – Well-presented products and user-friendly layout make browsing fun.
интернет вотка бет
страница kush casino
Следующая страница vodka bet
этот сайт водкабет
Продолжение vodka bet casino
кликните сюда куш казино официальный
ChicStyle Online – The platform felt modern and polished, with pages responding instantly.
зайти на сайт kush casino официальный сайт
Читать далее vodkabet
лучшие отели в Голубицкой с бассейном
посетить сайт vodka bet casino
продолжить куш казино официальный
здесь водка бет казино
City Fashion Picks – Browsing is effortless and the urban style collection looks appealing.
посмотреть на этом сайте казино хани мани
ссылка на сайт куш казино официальный
Читать далее водка казино регистрация
выберите ресурсы водкабет
GlobalRidge Picks – Neatly arranged items with smooth navigation for a pleasant shopping experience.
northernskycollections.shop – I love browsing here, items feel fresh and thoughtfully presented today.
узнать больше Здесь водкабет
sunshineoutlet – Found everything quickly, the site feels very neat.
ссылка на сайт vodka bet casino
найти это водкабет
можно проверить ЗДЕСЬ водкабет
Trend Market Hub Online – Clean design with organized items, browsing was simple and pleasant.
опубликовано здесь водка бет
посетить веб-сайт kush casino официальный сайт
выберите ресурсы водка бет
Grand River Finds Hub – River-themed products arranged thoughtfully, browsing feels seamless.
на этом сайте водка бет казино
Продолжение kush casino
Главная kush casino
Главная зеркало vodka bet
Следующая страница хани мани казино
продолжить зеркало водка бет
каталог куш казино официальный
этот контент vodka bet casino
посмотреть на этом сайте водка бет
нажмите, чтобы подробнее vodka bet
Читать далее водкабет
читать зеркало vodka bet
кликните сюда зеркало vodka bet
посетить веб-сайт vodka bet
Источник куш казино играть
перенаправляется сюда vodka bet
Color Mea Choices – Unique and appealing items, making browsing intuitive and fun.
каталог honeymoney casino промокоды
найти это vodka bet
этот сайт зеркало водка бет
кликните сюда зеркало водка бет
в этом разделе vodkabet
выберите ресурсы vodka bet casino
перейдите на этот сайт куш казино официальный
пояснения honeymoney casino промокоды
нажмите куш казино официальный
Продолжение зеркало vodka bet
Смотреть здесь kush casino официальный сайт
подробнее здесь kush casino
взгляните на сайте здесь водкабет
сайт vodka bet
смотреть здесь kush casino официальный сайт
нажмите здесь водкабет
Читать далее vodka bet
перенаправляется сюда водка бэт
узнать больше Здесь vodkabet
узнать больше водка бет
Главная водка бет
содержание водкабет
пояснения водка бет казино
PremiumChoiceHub – Neat design, well-laid-out pages, and easy-to-find products.
ссылка на сайт kush casino зеркало
здесь водкабет
здесь kush casino
Смотреть здесь vodka bet
playboy888
These enticing bonuses and rewards are designed to appeal to both fresh users and seasoned gamers.
Подробнее зеркало vodka bet
можно проверить ЗДЕСЬ vodka bet
Узнать больше зеркало vodka bet
Следующая страница honeymoney casino промокоды
Подробнее здесь kush casino
посмотреть на этом сайте казино хани мани
ссылка на сайт kush casino зеркало
найти это казино куш
узнать больше водкабет
веб-сайте vodka bet casino
смотреть здесь казино куш
продолжить куш казино официальный
нажмите здесь водкабет
Продолжение vodkabet
найти это зеркало vodka bet
опубликовано здесь kush casino
опубликовано здесь vodka bet
проверить сайт водка бэт
BranchVault – Items are neatly arranged, and the site layout is intuitive.
посмотреть в этом разделе водкабет
кликните сюда казино куш
узнать больше куш казино играть
зайти на сайт vodka bet casino
кликните сюда куш казино официальный
Fresh Fashion Corner – Good variety of looks, and the site’s responsiveness made things easy.
на этом сайте водкабет
на этом сайте хани мани казино зеркало
посмотреть в этом разделе vodkabet
этот сайт хани мани казино
содержание vodka bet
в этом разделе зеркало vodka bet
пояснения вотка бет
смотреть здесь vodkabet
узнать больше Здесь водка бет
продолжить зеркало vodka bet
опубликовано здесь куш казино играть
узнать зеркало водка бет
взгляните на сайте здесь водкабет
натяжных потолках
Это популярный выбор благодаря быстрому монтажу и разнообразию дизайнов.
Компания “natyazhni-steli-vid-virobnika.biz.ua” предлагает качественные потолки напрямую от производителя. Наша продукция соответствует европейским стандартам.
#### **2. Преимущества натяжных потолков**
Одним из главных плюсов натяжных потолков является их влагостойкость. Они идеально подходят для ванных комнат и кухонь.
Еще одно преимущество — огромный выбор цветов и фактур. Дизайнеры помогут создать уникальный стиль для вашего помещения.
#### **3. Производство и материалы**
Наша компания изготавливает потолки из экологически чистого ПВХ. Сертификаты подтверждают его гипоаллергенность.
Технология производства гарантирует прочность и эластичность полотна. Мы тщательно контролируем каждый этап создания продукции.
#### **4. Установка и обслуживание**
Монтаж натяжных потолков занимает всего несколько часов. Опытные мастера выполнят работу без пыли и грязи.
Уход за потолком не требует особых усилий. Пятна и пыль легко удаляются без специальных средств.
—
### **Спин-шаблон статьи**
#### **1. Введение**
Компания “natyazhni-steli-vid-virobnika.biz.ua” работает напрямую с клиентами без посредников.
#### **2. Преимущества натяжных потолков**
Можно создать как минималистичный, так и роскошный дизайн.
#### **3. Производство и материалы**
Мы используем только сертифицированные материалы от надежных поставщиков.
#### **4. Установка и обслуживание**
Поверхность устойчива к загрязнениям и не требует сложного ухода.
Trendy Collection Picks – Loved the assortment, browsing felt very smooth and natural.
взгляните на сайте здесь vodkabet
FutureWild Online – Smooth page transitions and stylish layout make exploring products easy.
проверить сайт зеркало vodka bet
покупка аккаунтов букмекерских контор Приобретение аккаунтов букмекерских контор может казаться привлекательным решением для тех, кто стремится расширить свой потенциал ставок или избежать персональных ограничений. Но, помимо юридических и этических аспектов, существует риск столкнуться с мошенническими схемами, когда продавец аккаунта может оказаться недобросовестным и после получения оплаты заблокировать доступ или использовать аккаунт в неправомерных целях.
продолжить куш казино играть
Hidden Valley Hub Online – Unique finds arranged neatly, making exploration easy and pleasant.
подробнее здесь водкабет
перейти на сайт kush casino
выберите ресурсы зеркало водка бет
Смотреть здесь зеркало vodka bet
Смотреть здесь хани мани казино официальный сайт
продолжить vodka bet
FindMotivation Studio – Well-laid-out motivational posts with seamless browsing experience.
здесь водка бет казино
Смотреть здесь водка казино вход
веб-сайте водка бет
Перейти на сайт kush casino официальный сайт
Adventure Finds Online – Easy to navigate and the adventurous theme creates an inviting feel.
веб-сайт хани мани казино зеркало
страница водка бет
Источник vodka bet
выберите ресурсы honey money казино
Источник honey money казино
подробнее здесь водка бэт
Продолжение vodka bet
Узнать больше vodka bet casino
нажмите vodka bet casino
Смотреть здесь vodka bet casino
веб-сайте honey money casino зеркало
Главная водкабет
перейти на сайт казино куш
кликните сюда vodka bet
CopperOutletShop – The discounts stand out clearly, and the site feels fast and convenient to move through.
кликните сюда vodkabet
интернет kush casino зеркало
нажмите здесь хони мони
читать зеркало vodka bet
здесь куш казино играть
перейти на сайт honey money casino бездепозитный бонус
этот сайт зеркало водка бет
Читать далее куш казино играть
нажмите здесь водка бет казино
сайт зеркало водка бет
читать kush casino зеркало
Перейти на сайт водка бет
перейти на сайт kush casino
узнать водкабет
Подробнее vodka bet casino
парящие потолки
Они отличаются практичностью и долговечностью.
Компания “natyazhni-steli-vid-virobnika.biz.ua” предлагает качественные потолки напрямую от производителя. Мы используем только проверенные материалы.
#### **2. Преимущества натяжных потолков**
Одним из главных плюсов натяжных потолков является их влагостойкость. Они идеально подходят для ванных комнат и кухонь.
Еще одно преимущество — огромный выбор цветов и фактур. Дизайнеры помогут создать уникальный стиль для вашего помещения.
#### **3. Производство и материалы**
Наша компания изготавливает потолки из экологически чистого ПВХ. Он не выделяет вредных веществ даже при нагревании.
Технология производства гарантирует прочность и эластичность полотна. Каждое полотно проходит проверку перед отправкой клиенту.
#### **4. Установка и обслуживание**
Монтаж натяжных потолков занимает всего несколько часов. Опытные мастера выполнят работу без пыли и грязи.
Уход за потолком не требует особых усилий. Даже через годы потолок сохранит первоначальный вид.
—
### **Спин-шаблон статьи**
#### **1. Введение**
Современные натяжные потолки позволяют преобразить пространство за считанные часы.
#### **2. Преимущества натяжных потолков**
Благодаря герметичности такие потолки предотвращают проникновение влаги.
#### **3. Производство и материалы**
Каждый экземпляр проходит многоступенчатый контроль.
#### **4. Установка и обслуживание**
Даже через много лет покрытие будет выглядеть как новое.
страница водка казино вход
сюда казино водка
ссылка на сайт vodka bet
перейдите на этот сайт vodka bet casino
Excellent breakdown of the topic.
проверить сайт vodka bet casino
FloralTreasure – User-friendly layout with lovely items and effortless browsing experience.
пояснения vodkabet
Продолжение водкабет
узнать больше vodka bet casino
Узнать больше vodka bet casino
PureStyleFinder – Attractive pages, simple layout, and a convenient browsing experience.
посмотреть в этом разделе vodka bet
Следующая страница vodka bet casino
выберите ресурсы vodka bet
посетить сайт водка бэт
FreshValue Store – Items were laid out clearly, and page transitions were quick and stable.
посмотреть в этом разделе vodka bet casino
нажмите kush casino зеркало
ссылка на сайт казино куш
Узнать больше kush casino официальный сайт
нажмите здесь водка бет казино
Подробнее здесь хони мони
узнать больше Здесь honeymoney casino промокоды
каталог хани мани казино
Перейти на сайт kush casino зеркало
выберите ресурсы водкабет
Trendy Purchase Hub Online – Great product variety, browsing between pages was easy.
интернет куш казино играть
этот сайт вотка бет
перейдите на этот сайт honey money casino бездепозитный бонус
Highland Craft Online – Well-organized items, browsing feels natural and satisfying.
crestartcollection – Intuitive layout and neatly organized listings, shopping was enjoyable.
выберите ресурсы водка бет казино
посмотреть на этом сайте водка бет казино
зайти на сайт vodka bet casino
проверить сайт vodka bet casino
baccarat
подробнее куш казино играть
веб-сайте kush casino
нажмите здесь куш казино играть
ссылка на сайт куш казино играть
Вакансии ООО Торгово-транспортное предприятие “Острое Жало” на rabota. ru
можно проверить ЗДЕСЬ водка бэт
содержание вотка бет
каталог honey money casino бездепозитный бонус
Подробнее водка бет
сайт водка бэт
Перейти на сайт водка казино зеркало
сайт водка бет
посмотреть на этом сайте kush casino официальный сайт
Offer Market Place – A wide range of discounts is listed, and navigating feels natural and smooth.
казино онлайн бонус за регистрацию Игровые автоматы, также известные как слоты, представляют собой один из самых популярных видов азартных игр в казино и онлайн-платформах. Их принцип работы основан на случайном выпадении символов на вращающихся барабанах, что определяет исход игры. Современные игровые автоматы предлагают огромное разнообразие тематик, бонусных функций и способов выигрыша, делая процесс игры увлекательным и непредсказуемым.
FreshBuy Studio – Clean layout with clearly displayed items and intuitive navigation.
в этом разделе водка бэт
пояснения хони мони
смотреть здесь казино куш
посетить веб-сайт водка бет
Узнать больше вотка бет
сюда kush casino зеркало
кликните сюда honey money casino бездепозитный бонус
этот контент vodka bet casino
Перейти на сайт https://skinwoo.ru/products/cell-fusion-c-radiance-vita-toner-300ml
Источник https://skinwoo.ru/products/hera-uv-protector-tone-up-50ml
перенаправляется сюда казино водка
нажмите, чтобы подробнее https://skinwoo.ru/products/ottie-gold-prestige-resiliency-gentle-moisturizer-130ml
CloverCozyDeals – Gentle visual style with cozy selections, creating a calm and enjoyable browsing experience.
StyleCorner Global – The layout made browsing easy, and the collection looked fresh and modern.
перейти на сайт куш казино официальный
подробнее здесь https://skinwoo.ru/products/nightingale-3-step-copage-removal-taco-octopus-copack-3-pieces-3-times-use
казино с выводом без верификации документов Мир игровых автоматов поражает своим разнообразием! Здесь вы найдете всё: от простых и понятных фруктовых слотов до сложных многоуровневых игр с захватывающими сюжетами и уникальными бонусными раундами. Каждый автомат – это отдельная история, своя атмосфера и свои правила игры. Исследуйте новые миры, собирайте комбинации и наслаждайтесь процессом, ведь в игровых автоматах возможно всё!
нажмите здесь https://skinwoo.ru/products/organist-rosemary-deep-cleansing-shampoo-500ml-4-pieces
веб-сайт https://skinwoo.ru/products/ariul-daily-pick-soothing-toning-pad-57g-30-pieces-3-pieces
здесь https://skinwoo.ru/products/phytostory-premium-oily-scalp-care-shampoo-1000ml
WildNorthSpot – Easy browsing and items arranged neatly for a pleasant shopping experience.
перенаправляется сюда kush casino
каталог kush casino официальный сайт
стоимость натяжных потолков
Такой вариант отделки сочетает в себе эстетику и функциональность.
Компания “natyazhni-steli-vid-virobnika.biz.ua” предлагает качественные потолки напрямую от производителя. Мы используем только проверенные материалы.
#### **2. Преимущества натяжных потолков**
Одним из главных плюсов натяжных потолков является их влагостойкость. Такое покрытие не боится протечек и конденсата.
Еще одно преимущество — огромный выбор цветов и фактур. Доступны как однотонные, так и фотопечатные варианты.
#### **3. Производство и материалы**
Наша компания изготавливает потолки из экологически чистого ПВХ. Сертификаты подтверждают его гипоаллергенность.
Технология производства гарантирует прочность и эластичность полотна. Мы тщательно контролируем каждый этап создания продукции.
#### **4. Установка и обслуживание**
Монтаж натяжных потолков занимает всего несколько часов. Уже через день вы сможете пользоваться обновленным помещением.
Уход за потолком не требует особых усилий. Даже через годы потолок сохранит первоначальный вид.
—
### **Спин-шаблон статьи**
#### **1. Введение**
Сегодня натяжные потолки стали неотъемлемой частью ремонта.
#### **2. Преимущества натяжных потолков**
Благодаря герметичности такие потолки предотвращают проникновение влаги.
#### **3. Производство и материалы**
Каждый экземпляр проходит многоступенчатый контроль.
#### **4. Установка и обслуживание**
Наши специалисты устанавливают потолки с точностью до миллиметра.
содержание https://skinwoo.ru/products/leaders-kaming-biotics-cream-mask-80ml
интернет honey money casino бездепозитный бонус
Смотреть здесь honey money casino промокод
APS Marketplace – Autumn-themed products look nicely arranged, with browsing feeling light and easy.
ссылка на сайт vodka bet
взгляните на сайте здесь куш казино играть
перенаправляется сюда хани мани казино зеркало
выберите ресурсы казино хани мани
Midday Marketplace Lane – Tidy interface with clearly structured categories supports smooth exploration.
найти это https://skinwoo.ru/products/green-finger-strong-moisturizing-intensive-soap-80gx2pcs
этот сайт хани мани казино официальный сайт
https://infolenta.com.ua/virshi-pro-rizdvo-naykrashchi-rizdviani-virshi-dlia-sviatkuvannia/
узнать больше Здесь куш казино играть
SimpleHome Shop Hub – Clear categories with responsive pages and smooth navigation.
curated shopping corner – Items are highlighted nicely, site navigation is simple and pleasant.
можно проверить ЗДЕСЬ казино хани мани зеркало
посетить веб-сайт kush casino зеркало
TSO Picks Hub – Great deals displayed nicely, navigating pages was simple and smooth.
узнать больше https://skinwoo.ru/products/julyme-parfum-hair-essence-full-bloom-80ml
перейдите на этот сайт куш казино играть
SimpleDealsHub – Great deals available, site navigation is smooth and browsing feels effortless.
High Pine Finds – Items arranged thoughtfully, navigation is intuitive and fast.
Следующая страница vodka bet
зайти на сайт водка бет
baccarat
TrendySelectionShop – Simple interface, clearly displayed products, and smooth browsing flow.
нажмите vodkabet
узнать больше vodkabet
каталог https://skinwoo.ru/products/ekel-hyaluronic-acid-4in1-sunscreen-70ml
сайт https://skinwoo.ru/products/ulos-allinone-skin-milk-200ml60ml
Узнать больше казино куш
Offer Highlights – Everything appears well-sorted, making it simple to check out the latest offers.
здесь kush casino официальный сайт
посетить веб-сайт https://skinwoo.ru/products/scinic-enjoy-perfect-daily-sun-cream-ex-50ml
Продолжение https://skinwoo.ru/products/kerasys-advanced-10x-moisture-ampoule-serum-80ml
FreshHome Lane Hub – Clean layout and tidy product arrangement make exploring home items easy.
Смотреть здесь vodkabet
кликните сюда vodka bet
опубликовано здесь vodka bet
посетить веб-сайт vodkabet
зайти на сайт https://krab1l.at/
посетить веб-сайт krab1at
интернет https://krab1cc.at
подробнее https://krab1cc.at
ValleyMarketSpot – Found useful value picks, and pricing feels reasonable and trustworthy.
click to read more thinkorswim
выберите ресурсы kraken маркетплейс зеркало
AutumnPeak Styles – Beautiful seasonal styles appear curated well, and exploring feels effortless.
why not look here thinkorswim
discoverandbuyhub.shop – Hub offers a solid variety, browsing feels smooth and intuitive today.
другие https://krab1l.at
Website thinkorswim login
description thinkorswim
посетить веб-сайт водка бет казино официальный сайт
перейдите на этот сайт https://krab1cc.at/
продолжить актуальные зеркала kraken
нажмите здесь кракен onion
Смотреть здесь kraken ссылка зеркало
website link thinkorswim login
Positive Living Hub – Navigation is seamless, and the items give a pleasant shopping vibe.
здесь https://krab1l.at
Узнать больше https://krab1cc.at/
happyshoppingcorner.shop – Corner shop looks great, browsing here feels smooth and very enjoyable.
Living Essentials Market – Fast page loads and clear arrangement made navigating effortless.
content thinkorswim login
перенаправляется сюда https://krab1cc.at
UGC Picks Store – Nice layout with beautiful gifts, exploring the site felt effortless.
узнать https://krab1cc.at
discoveramazingdeals.click – Discounts look attractive, shopping experience feels smooth and quick to use.
на этом сайте kraken онион
на этом сайте https://krab1cc.at/
выберите ресурсы https://krab1l.at
Ironline Boutique – Solid selection with dependable items, browsing feels effortless.
опубликовано здесь https://krab1cc.at
SimpleMarketDeals – Well-presented products, easy navigation, and smooth shopping flow.
see this page thinkorswim
crestartstyle – Well-structured site with clear sections, made shopping easy.
Recommended Reading thinkorswim login
baccarat
нажмите здесь Оземпик 1мг купить с доставкой
посетить сайт сайт kraken darknet
интернет водка бет рабочее зеркало
посмотреть на этом сайте kraken официальные ссылки
веб-сайте kraken ссылка зеркало
you can try these out thinkorswim login
Источник kra46.at
пояснения https://krab1cc.at
Continued thinkorswim
посмотреть на этом сайте https://progunsupply.com/
Подробнее здесь kraken ссылка зеркало
перенаправляется сюда https://progunsupply.com/
опубликовано здесь кракен онион тор
Смотреть здесь mounjaro купить в дубае
опубликовано здесь https://krab1cc.at/
visit this site right here thinkorswim
нажмите, чтобы подробнее kra46.at
узнать больше https://progunsupply.com/
пояснения https://progunsupply.com/
review thinkorswim login
продолжить https://krab1cc.at
Смотреть здесь kraken ссылка зеркало
?Levantemos nuestras copas por cada simbolo de la suerte !
Cada vez mГЎs usuarios prefieren casino por fuera por su flexibilidad y catГЎlogo internacional. Se adaptan a distintos estilos de juego gracias a su amplia variedad de productos. casino fuera de espaГ±a AsГ casino por fuera destaca como una de las opciones mГЎs flexibles disponibles hoy.
Los aficionados al juego eligen casino online fuera de espaГ±a cuando desean evitar restricciones locales. Incluyen herramientas modernas que facilitan sesiones mГЎs dinГЎmicas. En consecuencia casino online fuera de espaГ±a se vuelve una opciГіn preferida entre jugadores experimentados.
casinos fuera de espana: CГіmo elegir los mejores casinos fuera de espana – п»їhttps://bodegaslasangrederonda.es/en/
?Que la fortuna te acompane con regalos emocionantes del destino triunfos inolvidables!
his comment is here thinkorswim
сайт https://krab1cc.at/
Product Selection Online – A broad range of items available, and navigation feels refreshingly easy.
i was reading this thinkorswim
опубликовано здесь кракен onion
ссылка на сайт кракен ссылка kraken
найти это kra46 cc
продолжить кракен зеркало
нажмите https://krab1l.at
нажмите https://krab1cc.at
content thinkorswim
Следующая страница kraken ссылка на сайт
Следующая страница kraken сайт зеркала
FreshWear Online – Stylish presentation and tidy categories make shopping straightforward.
нажмите здесь https://krab1cc.at
здесь kraken актуальные ссылки
такой https://krab1cc.at/
BargainVault – Browsing was quick and intuitive, offers were easy to see.
найти это kraken актуальные ссылки
Discover a world of entertainment with 777bet slot, where unforgettable gaming moments and big wins await you!
When selecting an online betting site, security and reliability are paramount considerations.
опубликовано здесь https://krab1l.at
go to this site thinkorswim login
узнать kraken сайт зеркала
go to this site thinkorswim login
нажмите, чтобы подробнее kraken ссылка тор
favorite pick outlet – Outlet picks look clear and accessible, and the site works efficiently.
click now thinkorswim
Fresh Season Picks – Easy-to-navigate layout with seasonal products arranged attractively.
click this over here now thinkorswim
каталог vodka casino сайт водка бет
кликните сюда https://krab1l.at/
в этом разделе https://krab1l.at/
DFH online – Plenty of useful items here, and the platform feels quite trustworthy.
сюда кракен ссылка
Unique Gift Online – Items presented clearly, navigating pages was fast and easy.
интернет актуальные зеркала kraken
Style Picks Corner – Clear categories with responsive pages enhanced the overall experience.
на этом сайте krab 1 at
пояснения kraken зеркало
каталог krab 1 at
Iron Root Outlet – Corner store deals look appealing, browsing feels effortless.
inspiring growth shop – Selection appears useful, browsing is fast and intuitive.
power belief store – Items look encouraging, navigation is quick and user-friendly.
Подробнее здесь https://krab1cc.at/
check that thinkorswim
пояснения сайт kraken darknet
Смотреть здесь https://krab1cc.at
нажмите здесь kraken ссылка на сайт
22bet
Homepage thinkorswim
Extra resources thinkorswim
Источник https://krab1cc.at
проверить сайт водка бет
visit this site thinkorswim login
посмотреть в этом разделе https://krab1l.at/
этот контент kraken ссылка
Смотреть здесь https://krab1cc.at/
веб-сайте https://krab1cc.at/
ссылка на сайт kraken onion ссылка
Affordable Joy Corner – Easy navigation with attractive value items and fast-loading pages.
discover this thinkorswim login
нажмите здесь kraken ссылка зеркало
продолжить kraken onion ссылка
Смотреть здесь kraken ссылка зеркало
Источник kraken официальные ссылки
Продолжение кракен даркнет
в этом разделе https://krab1cc.at
посетить веб-сайт kraken site
Everyday Discount Shop – The selection feels refreshing, and the site layout is very user-friendly.
узнать больше kraken сайт
try here thinkorswim login
сюда kraken актуальные ссылки
этот сайт krab1 at
click this over here now thinkorswim
читать https://krab1cc.at/
navigate here thinkorswim login
recommended you read thinkorswim login
Главная кракен онион зеркало
my sources thinkorswim login
этот контент кракен даркнет маркет
find out this here thinkorswim
этот сайт kraken onion ссылка
HotDealsNow – Loved the clean layout and smooth navigation, really easy to check offers.
dig this thinkorswim login
веб-сайте kraken актуальные ссылки
интернет https://krab1cc.at/
find more thinkorswim login
страница https://krab1cc.at/
find more info thinkorswim login
useful site thinkorswim login
здесь kraken сайт зеркала
Read Full Article thinkorswim
на этом сайте https://krab1cc.at
review thinkorswim login
перейти на сайт https://krab1cc.at/
Смотреть здесь kraken сайт
Get More Information thinkorswim login
читать kraken сайт зеркала
review thinkorswim
click for info thinkorswim login
выберите ресурсы https://krab1cc.at
посмотреть на этом сайте https://krab1cc.at/
Check Out Your URL thinkorswim login
взгляните на сайте здесь kraken официальные ссылки
FashionWorld Select – Clean design and quick page loads made browsing very enjoyable.
TrendCorner Fresh – Clean layout with well-displayed products ensures quick and effortless navigation.
journey shop daily – Products are nicely organized, site feels quick and pleasant.
Majestic Grover Choices – Grover-themed items displayed neatly, browsing feels smooth and convenient.
bestfashionmarket.shop – Fashion market looks appealing, products are displayed neatly and clearly today.
WildRose Lifestyle Online – Cozy, inviting atmosphere, browsing revealed a few standout items.
grove hub collection – Nicely curated items, and the layout supports smooth browsing.
22bet
Следующая страница kraken сайт
over at this website thinkorswim login
GlobalFinds Select – Neatly arranged sections and clear layout make navigation simple and intuitive.
узнать больше Здесь https://krab1cc.at
подробнее https://krab1cc.at/
look here thinkorswim
next thinkorswim login
продолжить водка бет казино
кликните сюда https://krab1cc.at/
Перейти на сайт кракен онион
GiftFinderCenter – Clean visuals, easy browsing, and well-presented gift selection.
этот сайт kraken
здесь https://krab1cc.at
проверить сайт кракен ссылка
каталог водка бет зеркало
Продолжение https://krab1cc.at
Daily Style Outlet – Many trendy options available, and exploring them is quick and pleasant.
узнать https://progunsupply.com/
Перейти на сайт водка бет казино
сайт krab1cc
можно проверить ЗДЕСЬ mounjaro купить цена
нажмите здесь kraken ссылка зеркало
ссылка на сайт кракен вход
oakandriver – Great variety at oakandriver makes discovering new treasures so fun.
hop over to these guys thinkorswim
посетить сайт водка бет
Продолжение https://krab1cc.at/
смотреть здесь кракен даркнет
ChoiceFinder – Fast pages with neatly organized items for effortless browsing.
Modern Fashion Picks – Items are displayed attractively, and pages load quickly for a pleasant experience.
можно проверить ЗДЕСЬ https://krab1cc.at
go to this website thinkorswim
Узнать больше сайт kraken onion
ссылка на сайт kraken маркетплейс зеркало
this post thinkorswim login
посмотреть в этом разделе https://krab1cc.at
pin up aviator yuklab olish https://pinup5009.ru/
look at this website thinkorswim login
проверить сайт кракен онион зеркало
опубликовано здесь kraken onion ссылка
this thinkorswim login
site link thinkorswim
интернет kraken darknet
пояснения kra ссылка
important site thinkorswim login
подробнее kraken onion ссылка
на этом сайте кракен onion сайт
нажмите кракен ссылка kraken
здесь кракен онион тор
узнать актуальные зеркала kraken
Modern Decor Picks – Quick navigation and a neat, organized interface made browsing easy.
WildBrook Modern Creations – Loved the fresh selection and well-organized presentation.
learners’ hub click – Products look well-curated, site navigation is effortless.
MidCity Collection Spot – Attractive items arranged nicely, browsing feels effortless and smooth.
Wild Rose Studio Boutique – Lovely boutique vibe, discovering products was smooth and pleasant.
daily home picks – Products appear stylish, browsing feels pleasant and user-friendly.
страница kraken ссылка зеркало
22bet
Global Marketplace Elite – Browsing was simple, everything feels curated and premium.
перейти на сайт сайт kraken darknet
Продолжение сайт kraken darknet
view website thinkorswim login
about his thinkorswim login
Building Today Studio – Inspiring theme with organized sections and fast, easy navigation.
click here to read thinkorswim login
перенаправляется сюда https://krab1cc.at/
evercrest picks – Good mix of items throughout, and new additions keep the shop interesting.
DailyPickShop – Simple layout, user-friendly navigation, and attractive deals.
published here thinkorswim
authenticsupplyzone – AuthenticSupplyZone offers genuine items with a clean, easy-to-navigate layout.
try here thinkorswim login
найти это https://krab1cc.at/
Источник https://krab1cc.at/
Daily Fashion & Design – Attractive pieces pop out, and exploring the website feels seamless.
каталог кракен ссылка
more tips here thinkorswim login
Hey there! I know this is kinda off topic however , I’d figured I’d ask. Would you be interested in exchanging links or maybe guest authoring a blog post or vice-versa? My site addresses a lot of the same subjects as yours and I feel we could greatly benefit from each other. If you’re interested feel free to send me an email. I look forward to hearing from you! Great blog by the way!
fripi
этот сайт https://krab1cc.at/
Your Domain Name thinkorswim
resource thinkorswim login
informative post thinkorswim login
InfoCentral – Clear presentation of resources and smooth navigation throughout the site.
подробнее здесь kraken onion
Sunset Store Lane – Neat arrangement of products and cozy design provide a natural browsing flow.
important link thinkorswim
you can try this out thinkorswim login
visit homepage thinkorswim login
ironskyessentials – Customer feedback here helped me decide, ironskyessentials feels very trustworthy.
her explanation thinkorswim login
этот контент https://krab1cc.at
Chic Modern Finds – Stylish items are showcased beautifully, making browsing effortless.
нажмите здесь kraken onion
WildRose Lifestyle Online – Cozy, inviting atmosphere, browsing revealed a few standout items.
modern style corner – Products appear fashionable, everything is simple to find and organized.
узнать больше Здесь https://krab1cc.at/
Midnight Trend Store – Trendy selections look impressive, browsing feels effortless and natural.
ModernStyle Trend Store – Browsing felt effortless and the trendy products were well presented.
QuickDealsOutlet – Very convenient to shop, loads fast, and finds are easy.
you could try this out thinkorswim login
Immerse yourself in the world of exciting betting with aviator game login and try your luck!
Players must place their bets before the plane takes off, which adds to the anticipation.
basics thinkorswim
22bet
Premium Global Collection – Loved exploring here, items are well presented and diverse.
vpower apk download our website makes it easy and fast to access all the features of this great game.
Advanced encryption methods are employed to safeguard user data within the app.
перенаправляется сюда кракен darknet
посмотреть в этом разделе kraken сайт
сайт https://krab1cc.at
this thinkorswim
продолжить https://krab1l.at
подробнее кракен ссылка kraken
Click This Link thinkorswim
VisionAhead – Modern design, easy reading, and effortless site travel.
my website thinkorswim login
подробнее kraken ссылка зеркало
F&C Boutique – Well-presented fashion pieces look appealing, and the site feels fast and smooth.
Trendy Studio Lane – Attractive product arrangement and modern interface ensure enjoyable and intuitive browsing.
Evergreen Choice Hub – Nicely curated evergreen items, making it simple to locate exactly what you want.
FocusFinder – Smooth browsing experience and content is clearly structured.
веб-сайте https://krab1l.at/
Смотреть здесь https://cryptocloud.club/
published here https://vapeheart.shop/
пояснения https://krab1l.at/
Перейти на сайт https://cryptocloud.club/forums/zarabotok-na-memkoinax.34/
918kiss lama apk offers a convenient way to download the gambling application.
Regular updates help maintain its integrity and protect user data.
additional hints https://vapeheart.shop
Читать далее https://cryptocloud.club/forums/obsuzhdenie-de-fi-proektov.29/
important link top futures brokers
Spend a luxurious evening with good day 4 play!
Embracing good day 4 play allows people to explore their creativity and leisure.
this page https://vapeheart.shop
777bet online casino
The protection of players’ information is crucial at 777bet, guaranteeing their data remains secure.
Website regulated forex broker
my explanation https://vapeheart.shop/
anchor compare forex brokers
пин ап бонус на депозит http://pinup5010.ru
Следующая страница kraken актуальное зеркало
WildRose Finds – Warm and inviting atmosphere, browsing revealed a few delightful items.
look at here now https://vapeheart.shop/
в этом разделе https://cryptocloud.club/threads/alexxx-fx-mentorship-2024.125
Смотреть здесь https://progunsupply.com
great post to read futures trading brokers
his response regulated brokers MT4
style zone picks – Fashion items look attractive, navigating the site feels seamless.
Читать далее https://krab1l.at/
ссылка на сайт kra46
MidRiver Picks – Carefully curated products, browsing feels quick and pleasant.
read here https://vapeheart.shop
FreshFashionHub – Clean layout, fast page loads, and stylish items ready to pick.
Подробнее здесь https://cryptocloud.club/threads/crypto-boss-sliv-zakrytogo-kanala.69/
зайти на сайт https://progunsupply.com
Exclusive Trend Finds – Pages appeared fast and the style choices were surprisingly good.
перейти на сайт https://progunsupply.com
содержание kra46 at
здесь https://progunsupply.com
Продолжение https://cryptocloud.club/forums/obsuzhdenie-de-fi-proektov.29/
подробнее https://progunsupply.com/
Visit Website https://vapeheart.shop
Field Picks Hub – Neat sections and a clean layout enhance overall usability.
на этом сайте https://progunsupply.com/
Check This Out https://vapeheart.shop/
Design Collective Market – Unique selection with a clean presentation, exploring was enjoyable.
baccarat
нажмите здесь https://progunsupply.com
blog https://vapeheart.shop
нажмите https://progunsupply.com
blog here stock broker fractional shares
такой kraken актуальное зеркало
look at here best stock trading brokers
Urban Trend Market – Stylish marketplace setup with fast performance and organized layout.
узнать больше https://cryptocloud.club/threads/cryptology-intro-sliv-zakrytogo-kanala.81/
подробнее https://progunsupply.com
navigate here https://vapeheart.shop/
EcoSelectionHub – Organized layout, natural visuals, and user-friendly navigation.
подробнее кракен сайт
realhomehub – RealHomeHub provides authentic products that make shopping simple and enjoyable.
подробнее kraken ссылка
why not look here best forex broker for beginners
смешное про повседневность Юмористические рассказы рождаются в попытках дать смысл самым незначительным событиям. Годится рассказ о той встрече, когда опоздал на пять минут, потому что заговорил с продавцом об эхо в подземке; мы вышли из магазина смеялись над тем, как каждый шаг — это маленькое приключение. В кафе мой заказ превратился в мини-историю: вместо латте получил напиток с подписью «уникальный аромат утренней надежды» и официант улыбнулся: «Это наш новый эксперимент». Я попробовал напиток и подумал: хорошая история — это не идеальная жизнь, а способность превращать ошибки в яркие воспоминания. Так появляются юмор и улыбки там, где казалось бы всё уже предрешено.
выберите ресурсы https://cryptocloud.club/threads/cryptology-school-cryptology-14-beginner-advanced-pro-2024.85/
кликните сюда https://cryptocloud.club/threads/mmarketmaker-sliv-zakrytogo-kanala.46/
Подробнее https://krab1l.at
PathwayToSuccess – Smooth navigation and content is organized in a user-friendly way.
Узнать больше кракен сайт
visit homepage https://vapeheart.shop/
WildBrook Modern Living – Very sleek aesthetic, exploring the collection was fun and easy.
здесь krab 1 cc
Extra resources https://vapeheart.shop/
найти это https://cryptocloud.club/threads/crypto-aman-premium-content-leak-free.80/
click to read https://vapeheart.shop/
Everline Store – Items look appealing, and moving through sections feels effortless.
Подробнее здесь https://progunsupply.com
кликните сюда https://progunsupply.com
WildWood Finds Hub – Stylish collection with clean layout and seamless page flow.
посетить сайт https://cryptocloud.club/threads/oleg-fakeev-kity-investicij-obuchenie-2025.120
navigate to these guys https://vapeheart.shop/
this contact form stock trading platform reviews
нажмите, чтобы подробнее кракен войти
your gift gallery – The gallery of gift items looks polished, and navigation feels very smooth.
узнать больше https://cryptocloud.club/forums/zarabotok-na-memkoinax.34/
find more information https://vapeheart.shop/
go top futures brokers
go to my blog https://vapeheart.shop
перенаправляется сюда https://progunsupply.com
Wild Rose Online – Pleasant layout and inviting atmosphere, discovered several nice items.
read the full info here https://vapeheart.shop/
ссылка на сайт kra46
пояснения https://progunsupply.com
he said regulated brokers low spreads
Modern Roots Picks Hub – Well-arranged selections, navigation feels effortless and pleasant.
посмотреть в этом разделе kraken зеркало
кликните сюда кракен вход
содержание кракен сайт
TrendSpotStore – Quick access to fashionable items, easy navigation, and smooth experience.
Choice Picks Today – Smooth transitions, good organization, and a very user-friendly vibe overall.
special info https://vapeheart.shop/
посмотреть в этом разделе https://progunsupply.com/
have a peek at this site https://vapeheart.shop/
страница Оземпик 1мг в наличии
discover this https://vapeheart.shop
Home & Lifestyle Studio – Navigation felt effortless and each product seemed carefully curated.
узнать больше kra46.at
нажмите, чтобы подробнее Оземпик 0.5 мг в наличии
взгляните на сайте здесь krab1.cc
sites fca licensed forex broker
выберите ресурсы https://cryptocloud.club/forums/obsuzhdenie-ton-proektov.31/
Подробнее здесь мунжаро купить mounjaro tirzepatide
you can try this out https://vapeheart.shop
Full Article https://vapeheart.shop
milf porno
узнать Оземпик синий наличие
кликните сюда https://cryptocloud.club/forums/slivy-kursov-po-kripte-trejdingu.19/
dig this top regulated forex brokers
Подробнее здесь kra45
their website forex broker negative balance protection
кликните сюда https://cryptocloud.club/forums/airdrops-spisok-aktualnyx-dropov.39/
Read More Here TradingView brokers
сюда kra46
нажмите, чтобы подробнее https://cryptocloud.club/threads/slezy-satoshi-ot-kripto-xomjaka-do-manipuljatora-2024-rafaehl-manveljan.114
check out the post right here https://vapeheart.shop
содержание kraken зайти
такой кракен сайт
содержание kra46 at
Смотреть здесь https://cryptocloud.club/threads/crypto-juke-sliv-zakrytogo-kanala.38/
страница https://cryptocloud.club/threads/kak-obmenjat-kriptu-v-ukraine-nadezhnye-servisy.144/
imp source trusted forex brokers
нажмите здесь казино водка бет
посетить сайт https://cryptocloud.club/threads/crypto-davy-sliv-zakrytogo-kanala.40/
перенаправляется сюда кракен сайт
read this post here compare forex brokers
FashionHub – Smooth navigation and stylish products displayed attractively.
find more https://vapeheart.shop/
my blog https://vapeheart.shop
страница kra46 at
UrbanWild Online – Sleek, creative design with clear product sections keeps navigation smooth.
Shopping Day Outlet – Pages load quickly and the overall browsing experience is pleasant.
Everwild Store – Product selection is appealing, and navigation feels fast and natural.
Unique Gift Corner – Well-laid-out pages with clearly presented items enhance the shopping experience.
MoonCrest Design Hub – Creative selections look appealing, navigation feels effortless.
WildRose Studio Online – Cozy and charming shop, found a few pieces worth exploring.
BestGiftSpot – Easy-to-browse gifts, fast page loads, and enjoyable shopping flow.
Quiet Marketplace – Clean visuals and smooth transitions made checking items a pleasure.
Purposeful Goods Online – Browsing is simple and smooth, the collection is modern and intentional.
Elite Finds Collection – Carefully curated collection with visually appealing and user-friendly design.
Узнать больше кракен darknet
веб-сайте кракен onion сайт
такой kraken сайт
<ethicaltrendhub – EthicalTrendHub showcases thoughtfully curated items for a smooth and enjoyable browsing experience.
подробнее здесь
билды для нью ворлд
другие маркеплейс
Узнать больше neverlose.cc
нажмите
гайд по крафту New World, гайд по ремеслам New World
GiftDepot – Lovely items showcased nicely, and browsing feels very natural.
посетить веб-сайт midnight
этот сайт skeet
посмотреть на этом сайте
сундук для хранения New World, сундуки New World
такой
калькулятор крафта New World, калькулятор ремесел New World
style zone picks – Fashion items look attractive, navigating the site feels seamless.
взгляните на сайте здесь
калькулятор крафта New World
нажмите миднайт кс2
зайти на сайт Skinchanger
ссылка на сайт
калькулятор крафта New World, калькулятор ремесел New World
здесь чит на кс 2
узнать больше купить фаталити инвайт
Смотреть здесь
калькулятор New World, нв калькулятор
WildBrook Modern Collection – Everything feels polished and fresh, made browsing delightful.
подробнее
калькулятор билдов New World, планировщик билдов New World
нажмите
New World дб, нв дб
Pokračuj ve vytváření tak hodnotného obsahu!
найти это lua скрипт
Читать далее
гайд по крафту New World, гайд по ремеслам New World
читать
осколок порчи New World
опубликовано здесь
New World откликнуться на зов получить призывное письмо
этот сайт бесплатный кфг для чита
веб-сайте
ремонт акпп в Москве
продолжить Читы для CS: GO
visit this web-site cheap non vbv cc
Продолжение
билды для нью ворлд
Wild Rose Collection Online – Lovely atmosphere with a few delightful discoveries along the way.
click here to read forum dma community
BelieveMore Shop – Warm tone throughout the site, loading efficiently and effortlessly.
Mountain Mist Select – Attractive collection showcased well, navigation is simple and smooth.
GlowMarket Hub – Stylish design with clear product organization offers effortless navigation.
you can try here x2 smartcard all in one 2025
visit our website ai call of duty
TrendSpotStore – Items look modern, browsing is effortless, and layout is clean.
Everwood Supplies Corner – Navigation feels smooth and the products are displayed cleanly and consistently.
Curated Shop Studio – Unique selection with smooth navigation, exploring was simple and enjoyable.
веб-сайте
ремонт акпп в Москве
go to this web-site free dma board
browse around these guys non vbv cards
Quiet Plains Essentials – Calm design with fast-loading pages and easy-to-browse categories.
try these out
dma card deals
UniqueGift Lane – Clean design, well-arranged gifts, and effortless exploration throughout the site.
Curated Premium Picks – Thoughtfully arranged products with intuitive navigation and clean layout.
why not check here dma software suite
на этом сайте
замена масла
over here dma developer updates
смотреть здесь https://cryptocloud.club/
Plai in inverter game and experience the adrenaline rush with every bet!
The objective is to cash out before the plane flies away, which can be both exhilarating and nerve-wracking.
Get More Information thinkorswim login
shopping zone picks – Selections appear modern, site layout feels natural and clear.
Das ist der Qualitätsinhalt, der mich zurückkommen lässt.
you can find out more thinkorswim login
другие https://cryptocloud.club/threads/rustik-vasilevich-sliv-zakrytogo-kanala.54/
взгляните на сайте здесь https://cryptocloud.club/threads/evgenij-chernyx-sliv-zakrytogo-kanala.82/
страница https://cryptocloud.club/threads/uptrade-sliv-zakrytogo-kanala.15/
лучшие отели Витязево всё включено
смотреть здесь https://cryptocloud.club/threads/sytyj-xomjak-kriptotrejding-ot-a-do-ja-lev-dmitrievich-2024.115
на этом сайте https://cryptocloud.club/threads/pifagor-trade-vse-chto-ja-znaju-2025.121/
site here https://handwiki.org/wiki/Documentation
hop over to this website https://infogalactic.com/info/Asset_management
hop over to these guys http://frigidairerefrigeratorpartsdoorhandle.blogspot.com/2017/09/capital-refrigeration.html
перейти на сайт https://cryptocloud.club/threads/crypto-aman-premium-content-leak-free.80/
Источник https://cryptocloud.club/threads/analytics-sancho-sliv-zakrytogo-kanala.58/
нажмите здесь https://cryptocloud.club/threads/mentorship-obuchenie-cryptomannn-2-0-2023.88
you can try here http://portableairconditioningunitsremakuji.blogspot.com/2015/02/
здесь https://cryptocloud.club/threads/ladesov-crypto-sliv-zakrytogo-kanala.42/
WildRose Essentials – Warm and friendly environment, browsing uncovered a few gems.
click over here now https://skl-almus24.online/2025/02/05/google-%D0%BF%D0%BE%D1%82%D1%80%D0%B0%D1%82%D0%B8%D1%8275mo-huruf/
Homepage https://wikiterminal.com/en/Documentation
useful source https://linkpitcherdirectory.com/website-list-1907/
Перейти на сайт https://cryptocloud.club/threads/cryptology-school-smart-money-and-ict-concept-coba-orderblockovich.87
опубликовано здесь https://cryptocloud.club/threads/mmarketmaker-sliv-zakrytogo-kanala.46/
взгляните на сайте здесь https://cryptocloud.club/threads/analytics-sancho-sliv-zakrytogo-kanala.58/
Mountain Star Hub – Trendy selections look appealing, browsing feels smooth and intuitive.
ValueFinderStore – Easy to locate products, quick browsing, and simple layout.
Curated Creative Commerce – A bright and inviting shop, every item feels intentionally chosen.
more https://www.rtponeplay02.xyz/category/uncategorized/page/2/
web link https://www.teamconcept.fr/%EF%BB%BF50s-plus-mature-dating-online-site-without-registration
site here http://ingenieriaymantenimiento.blogspot.com/2011/11/gestion-de-piezas-de-recambio.html
RainyCity Hub Online – Intuitive navigation paired with a lovely, themed design.
find out http://casefanmabariki.blogspot.com/2017/06/case-fan-anti-vibration.html
Visit Website http://portableairconditioningunitsoku.blogspot.com/2015/02/portable-air-conditioning-units-non_5.html
directory https://bumipertiwitrans.com/2025/02/05/pencarian-chatgpt-sekarang-tersedia-untuk-semua-pengguna-bahkan-mereka-yang-tidak-memiliki-akun/
find out this here https://www.iaswww.com/apr/Regional/Europe/United_Kingdom/England/Surrey/Farnham/Business_and_Economy/
Elevated Digital Clicks – Digital-first layout with responsive pages and smooth navigation.
blog here https://www.fluencycheck.com/1027142/luxury1288-situs-slot-gacor-maxwin-terpercaya-tahun-di-2025
Источник https://cryptocloud.club/threads/kak-zarabotat-na-kripte.139/
Forest Everyday Hub – Well-organized products make locating daily essentials fast and hassle-free.
Home Page http://portableairconditioningunitsoku.blogspot.com/2015/02/portable-air-conditioning-units-non_20.html
you can find out more https://idwikipedia.org/wiki/Documentation
image source http://boilerchidoran.blogspot.com/2017/09/xid-boiler-tubes.html
my response https://worldwidetopsite.com/website-list-556/
нажмите, чтобы подробнее https://cryptocloud.club/threads/put-k-millionam-sliv-zakrytogo-kanala.49/
my website https://en.everybodywiki.com/Documentation
Seasonal Picks Online – Nicely sorted departments with quick loading and an appealing layout.
my blog http://coolingtowerssubeike.blogspot.com/2017/04/jyoti-cooling-towers.html
check my reference https://gaminglist.my.id/tag/kebijakan/page/6/
anchor http://servicesproviderenkisu.blogspot.com/2017/07/service-provider-wikipedia.html
helpful hints http://homerepairsbendoko.blogspot.com/2017/06/home-repairs-on-budget.html
UniqueValue Finds Hub – Well-arranged products and fast-loading pages make exploration effortless.
go to this site https://www.flyparking.it/%EF%BB%BFmature-dating-online-site-for-relationships-completely-free/
More hints http://boilerrepairsrimaise.blogspot.com/2017/07/oil-boiler-repairs-cheshire.html
пин ап легально https://www.pinup5011.ru
heritageexplorehub – HeritageExploreHub presents distinctive items with a classic and elegant vibe.
продолжить https://cryptocloud.club/forums/airdrops-spisok-aktualnyx-dropov.39/
trend style shop – Items look modern, navigation is simple and clear.
MoonGlow Select – Clean visuals and well-laid-out sections make shopping feel natural and easy.
view it http://www.penelopesplace.net/2012/06/07/a-c-petersens/comment-page-8619/
пояснения https://cryptocloud.club/threads/vadim-sadovskij-sliv-zakrytogo-kanala.64/
visit site http://portableairconditioningunitsremakuji.blogspot.com/2015/
look these up http://lnu.diva-portal.org/smash/record.jsf?pid=diva2:277028
проверить сайт https://cryptocloud.club/threads/insajder-na-binance-xajdar-sabiev-sliv-zakrytogo-kanala.21/
здесь https://cryptocloud.club/forums/zarabotok-na-memkoinax.34/
visit this web-site http://ingenieriaymantenimiento.blogspot.com/2007/10/mantenimiento-que-es.html
pop over to these guys https://etherealtrade.xyz
Going Here https://hyperliquid-wiki.cc/
look at this site https://dexrp.buzz/
you can try this out https://ethereal.credit/
published here https://liquity.cfd/
WildRose Finds Online – Boutique has a warm and charming vibe, browsing was enjoyable.
this link https://looksrare.cfd
he said https://kittenswap.buzz
на этом сайте https://cryptocloud.club/threads/cryptology-school-cryptology-9-0-base-advanced-pro-2023.86/
directory https://palladiumlabs.net
this hyperlink https://etherealtrade.lat
Go Here https://dexrp.wtf/
читать https://cryptocloud.club/
my sources https://berapaw.org
read more https://theo.exchange
have a peek at these guys https://palladiumlabs.net
продолжить https://cryptocloud.club/threads/cryptology-intro-sliv-zakrytogo-kanala.81/
visit the site https://defi-money.cc/
Next Gen Essentials Hub – Smooth shopping experience with innovative and practical products.
Viyana Üniversitesi
содержание https://cryptocloud.club/threads/rast-pentagon-dyor-5-0-2025.130
Читать далее https://cryptocloud.club/forums/torgovye-strategii-i-signaly.23/
узнать https://cryptocloud.club/threads/mysli-vajkoffa-kurs-ot-wyckoff-team-ilja-lugvin-2025.124
Mountain View Online – Outlet products look appealing, site navigation is smooth and simple.
Читать далее https://cryptocloud.club/threads/p4m-pursuit4million-andrej-sobolev-sliv-zakrytogo-kanala.48/
websites https://ethereal.credit/
click https://avalonfinance.cv/
porno
WildRose Collection – Boutique has a cozy and inviting vibe, discovered a few standout items.
click this site https://beratrax.org/
нажмите, чтобы подробнее https://cryptocloud.club/threads/teorija-verojatnostej-sliv-zakrytogo-chata.60/
over here https://hyperliquid-wiki.cv
hop over to this web-site https://g8keep.org
Purposeful Selection Hub – Browsing felt easy and pleasant, products are curated with care and attention.
BrightValueDeals – Great bargains available, site is simple to browse and loads quickly.
лучшие экскурсии в Нальчике
смотреть здесь https://cryptocloud.club/threads/crypto-angel-leonid-maloletov-sliv-zakrytogo-kanala.45/
Продолжение https://cryptocloud.club/threads/aliev-aziz-sliv-zakrytogo-kanala.12/
Studio Peak Sunrise – Really liked the modern, artistic tone here, very smooth to navigate.
нажмите здесь https://cryptocloud.club/forums/obsuzhdenie-de-fi-proektov.29/
нажмите здесь https://cryptocloud.club/threads/trejding-dlja-vsex-pattern-shef-uchitel-boss.103
Продолжение https://cryptocloud.club/threads/cryptoshaurma-professional-sliv-zakrytogo-kanala.63/
you can try these out https://alchemix.center/
Flora Emporium Online – Beautiful plant-themed layout and easy browsing throughout the site.
pop over here https://dexrp.buzz
look at this now https://hyperliquid-wiki.cv
Источник https://cryptocloud.club/forums/torgovye-strategii-i-signaly.23/
basics https://safeglobal.club
Get the facts https://yieldfi.pro/
Refined Living Marketplace – Clean design and well-structured product sections for easy exploration.
look at more info https://palladiumlabs.net
her response https://hypperswap.cloud/
visit this site https://etherealtrade.lat/
this https://beraborrow.cc
why not try these out https://hypperswap.cloud/
click for more info https://palladiumlabs.net
her explanation https://dexrp.buzz
important link https://d2finance.cv/
read this article https://kinetiq.buzz
trend picks outlet – Fashion pieces look appealing, shopping here is fast and enjoyable.
Forest Lane Deals – Items presented elegantly, giving the site a peaceful and enjoyable feel.
this page https://terminal.credit
go to the website https://ethereal.credit/
company website https://avalonfinance.cv
Recommended Reading https://theo.exchange/
click for info https://beraborrow.cc
web https://theo.sbs/
Learn More https://alchemix.center
look at this now https://hlp0.online
take a look at the site here https://cakepad.digital
Full Article https://liquity.cfd
UrbanChoice Lane Online – Fast-loading pages with clear product arrangement make navigation simple.
Radiant Style Market – The visuals pop with color, and the categories are simple to explore.
like it https://unich.icu/
navigate to this website https://daodao.cfd
Your Domain Name https://d2finance.cv/
anonymous https://camelot.click/
have a peek at these guys https://yieldfi.pro/
Choice Hub Online – Products are curated nicely, and the shopping experience is smooth overall.
visit https://etherealtrade.lat
his comment is here https://d2finance.cc
browse around this site https://d2finance.cc
learn this here now https://ethereal.credit
see this page https://royco.cc/
content https://daodao.cfd/
visit the website https://hlp0.cloud
OfferPath Guide – The interface flows nicely, helping users locate deals quickly.
Next Gen Essentials Hub – Smooth shopping experience with innovative and practical products.
visit this website https://unich.icu/
helpful site https://daodao.cfd
go https://hyperliquid-wiki.cv
their explanation https://etherealtrade.lat/
read this post here https://camelot.click/
wikipedia reference https://plasma.credit/
click here for more https://snake.credit/
her comment is here https://defi-money.cc
click this link here now https://looksrare.cfd
you could try here https://avalonfinance.cv
NameDrift Treasures Hub – Items displayed clearly, site navigation is smooth and intuitive.
baccarat
look these up https://kinetiq.buzz/
EverForest Goods – Calm and natural presentation, browsing through items is a pleasure.
have a peek at this site https://safeglobal.club/
carefullychosenluxury – Carefullychosenluxury has an elegant selection that made browsing feel premium and fun.
have a peek at this site https://plasma.credit/
navigate to this web-site https://kittenswap.buzz/
Check Out Your URL https://arch.credit
BudgetFriendlyHub – Quick access to items, layout is clean, and shopping is hassle-free.
his explanation https://defi-money.cc/
continue reading this https://plasma.credit/
click to read more https://boros.cfd
additional reading https://hlp0.cloud/
you can try this out https://hypperswap.space/
additional reading https://boros.cfd/
Continue Reading https://avalonfinance.cv/
the original source https://beratrax.org
check my reference https://prjx.online/
visit here https://berapaw.org/
Fashion Style Hub – Clean and organized layout with calm browsing experience.
next https://d2finance.cc/
his comment is here https://boros.cfd/
you could look here https://beratrax.org/
web link https://prjx.space
he said https://rangerfinance.xyz
GoalAchieverHub – Motivating posts, pages load quickly and site navigation is comfortable.
La plateforme 1xbet burkina: paris sportifs en ligne, matchs de football, evenements en direct et statistiques. Description du service, marches disponibles, cotes et principales fonctionnalites du site.
Full Report https://beraborrow.cc/
his response https://camelot.click
pure value selections – Selections are practical, navigation feels simple and organized.
this link https://daodao.cfd/
Site web 1xbet congo – paris sportifs en ligne sur le football et autres sports. Propose des paris en direct et a l’avance, des cotes, des resultats et des tournois. Description detaillee du service, des fonctionnalites du compte et de son utilisation au Congo.
he has a good point https://arch.credit/
find more information https://dexrp.wtf
basics https://navigator-exchange.org/
this website https://etherealtrade.xyz/
Site web de pari foot rdc: paris sportifs, championnats de football, resultats des matchs et cotes. Informations detaillees sur la plateforme, les conditions d’utilisation, les fonctionnalites et les evenements sportifs disponibles.
La plateforme en ligne 1xbet apk burkina: paris sportifs en ligne, matchs de football, evenements en direct et statistiques. Description du service, marches disponibles, cotes et principales fonctionnalites du site.
a fantastic read https://palladiumlabs.net/
content https://berapaw.org
creativeexplorehub – CreativeExploreHub showcases premium items in a clean, easy-to-browse layout.
have a peek at this website https://unich.icu
navigate to this site https://rangerfinance.xyz
try this out https://navigator-exchange.org/
пин ап надёжный сайт pinup5012.ru
you can check here https://berapaw.org
click resources https://d2finance.cc
published here https://liquity.cfd
my review here https://prjx.online/
Application mobile 1xbet burkina faso. Paris sportifs en ligne, football et tournois populaires, evenements en direct et statistiques. Presentation de l’application et de ses principales fonctionnalites.
Get the facts https://hyperliquid-wiki.cv
see here https://daodao.cfd
Glow Lane Boutique – Attractive product arrangement with smooth and easy browsing.
Learn More https://hypperswap.cloud/
additional reading https://dexrp.buzz
her comment is here https://terminal.credit
site https://alchemix.center/
This Site https://rangerfinance.xyz/
visit this web-site https://hlp0.online
check out here https://snake.credit/
Fashion Daily Finds – Products are clearly displayed, making shopping pleasant and fast.
informative post https://d2finance.cc
view website https://d2finance.cv/
best site https://kinetiq.lat/
my explanation https://hlp0.online
their explanation https://etherealtrade.rest
Recommended Reading https://kinetiq.lat/
Thoughtful Lifestyle Marketplace – The store highlights products chosen with intention, making browsing easy.
check my source https://plasma.credit/
get redirected here https://hlp0.cloud/
go to website https://rangerfinance.xyz
useful reference https://navigator-exchange.org
click here for more https://usdai.cloud/
try this out https://safeglobal.club/
click to investigate https://etherealtrade.lat
dig this https://unich.icu
More Bonuses https://unich.icu
TallCedar Online – Friendly layout and cozy charm, exploring the store was pleasant.
Homepage https://arch.credit
go to this website https://hyperliquid-wiki.cc
baccarat
NatureRoot Treasures Hub – Lovely items presented well, shopping feels easy and enjoyable overall.
Modern Purpose Marketplace – Very enjoyable browsing experience, everything is clean and organized.
find here https://defi-money.cc
have a peek at this site https://boros.cfd
GrowLink Market – Clean sections, motivating tone, and an overall pleasant browsing flow.
visit the website https://kittenswap.buzz/
see this https://hlp0.cloud/
browse around here https://alchemix.center
click this over here now https://cakepad.digital
Soft Petal Online – Love how soothing the selection feels; it’s always a delightful scroll.
BuildVisionHub – Quick access to inspiring products, smooth layout, and simple browsing.
find https://theo.sbs/
pop over to this web-site https://avalonfinance.cv
Visit This Link https://camelot.click/
pureforeststudio – Nice layout overall, browsing products is easy and pleasantly organized.
More hints https://hyperliquid-wiki.cv
official statement https://camelot.click/
have a peek at this site https://unich.icu/
go to my blog https://beraborrow.cc/
original site https://etherealtrade.rest
company website https://kittenswap.cc/
CornerTrend Discover – Attractive fashion sections and helpful filters make finding items effortless.
this page https://hyperliquid-wiki.cc/
click here for more info https://arch.credit
read https://hypperswap.space/
i thought about this https://prjx.online
Contemporary Design Hub – Contemporary visuals presented in an organized and smooth browsing format.
address https://prjx.space/
look at here https://unich.icu/
Click This Link https://d2finance.cc
pop over here https://beraborrow.cc
additional info https://plasma.credit/
KnowledgeVault – Informative content and navigating the site felt natural.
shopping & discovery hub – Items are well arranged, browsing feels smooth today.
read the article https://d2finance.cc/
site link https://ethereal.credit
see this here https://beratrax.org/
discover this https://safeglobal.club
Read More Here https://hypperswap.space/
look at this website https://d2finance.cv
you could check here https://camelot.click
more tips here https://hyperliquid-wiki.cc
internet https://hypperswap.cloud
discover this https://beratrax.org
go right here https://ethereal.credit/
useful site https://plasma.credit
Extra resources https://snake.credit
have a peek at this web-site https://prjx.space
her latest blog https://gluex.io
i thought about this https://hypperswap.cloud
see this site https://kittenswap.cc
visite site https://yieldfi.pro
his explanation https://boros.cfd/
check my source https://boros.cfd
Daily Fashion Deals – Affordable selections displayed clearly, shopping feels easy today.
visit homepage https://defi-money.cc
>Next-Level Living Picks – Clean design combined with forward-thinking products enhances the experience.
find here https://avalonfinance.cv
Goldcrest Hub Online – Well-arranged items and intuitive navigation make browsing effortless.
go to this web-site https://hyperliquid-wiki.cv
Wild Bird Lifestyle – Distinct and creative items, each product seems carefully picked.
important link https://prjx.space/
go to this website https://beratrax.org
Clicking Here https://arch.credit
page https://safeglobal.club/
22bet
NightBloom Treasures – Beautifully displayed products, browsing here feels intuitive and pleasant.
visit https://usdai.cloud/
Stylish Living Hub – The layout is clean, and the selection feels modern and enjoyable.
look at these guys https://cakepad.digital
official statement https://kinetiq.buzz
see here now https://hlp0.cloud
pop over to this website https://kittenswap.cc
see this website https://hypperswap.space
look at this website https://navigator-exchange.org
TrendExpressCorner – Smooth interface, modern trends, and simple, enjoyable navigation.
Homepage https://dexrp.buzz/
more helpful hints https://prjx.online
more tips here https://hyperliquid-wiki.cc
Get More Info https://avalonfinance.cv/
find more https://camelot.click
Full Report https://boros.cfd/
resource https://prjx.space
Look At This https://theo.exchange
click https://hyperliquid-wiki.cc/
read the full info here https://hypperswap.cloud/
important source https://kinetiq.lat/
address https://looksrare.cfd
official site https://theo.exchange
check my source https://etherealtrade.rest
Check This Out https://d2finance.cc
why not check here https://safeglobal.club
check https://avalonfinance.cv
<Quality Living Hub – Well-presented lifestyle items with a reliable and fast-loading interface.
Inspired Finds Hub – An engaging selection and straightforward navigation make for a great visit.
other https://g8keep.org
ModernDiscoverFashion – Items are appealing and moving through the site was effortless.
navigate to this site https://beratrax.org
top deals picks – Offers look attractive, site layout is clean and intuitive.
websites https://safeglobal.club
go right here https://hlp0.cloud
over at this website https://plasma.credit
hop over to this web-site https://royco.cc/
have a peek here https://camelot.click/
web link https://cakepad.digital
пин ап получить бонус через промо https://pinup5013.ru/
More Help https://looksrare.cfd
Futurecrest Goods – Appealing layout with a creative touch; browsing felt natural and enjoyable.
I just wanted to take a moment to express my gratitude for the great content you consistently produce. It’s informative, interesting, and always keeps me coming back for more!
qualitymarketplace – QualityMarketplace presents a curated collection with clean, clear product information.
try this out https://beratrax.org/
informative post https://hlp0.cloud/
Click This Link https://prjx.space/
click over here https://palladiumlabs.net
published here https://hyperliquid-wiki.cc
hop over to this website https://navigator-exchange.org/
a href=”https://discoveryourpurpose.click/” />Guide to Purpose – A supportive theme with neatly aligned content simplifies exploration.
her explanation https://prjx.space/
address https://hyperliquid-wiki.cv
World Lifestyle Finds – The layout is clean, and exploring authentic items is enjoyable.
Resources https://d2finance.cv
UrbanRidge Picks – Modern and inviting layout with a variety of products to explore.
Fashion Daily Deals – Variety here is impressive, site navigation is seamless and simple.
Continue Reading https://avalonfinance.cc/
read the full info here https://snake.credit
why not try this out https://rangerfinance.xyz/
important link https://d2finance.cc
you can try these out https://camelot.click
helpful resources https://camelot.click
22bet
great site https://hyperliquid-wiki.cv
you could look here https://rangerfinance.xyz
click for more https://daodao.cfd
Worldwide Design Picks – The layout makes exploring creative items enjoyable and straightforward.
click for more https://berapaw.org/
learn this here now https://palladiumlabs.net
navigate to these guys https://defi-money.cc
<Golden Harbor Choices – Everything appears tidy and dependable, navigation flows naturally.
more https://terminal.credit
Northern Peak Premium – Items displayed nicely, shopping the site feels effortless and smooth.
visit our website https://plasma.credit/
промокод 1вин 1вин casino – это мир азарта и развлечений, где каждый найдет игру по душе.
visit this page https://prjx.online
ElegantStyleHub – Shopping is intuitive, items are displayed neatly, and pages load quickly.
go to the website https://avalonfinance.cc
discover this https://camelot.click
my blog https://looksrare.cfd
read this article https://hyperliquid-wiki.cc
why not try these out https://hypperswap.space/
why not try these out https://prjx.space/
Intentional Click Hub – Clean, minimal design with effortless navigation and smooth page flow.
informative post https://unich.icu
click over here https://dexrp.wtf/
click here to investigate https://defi-money.cc/
Get the facts https://prjx.online/
Check Out Your URL https://prjx.online/
best finds outlet – Items are easy to browse, navigating the site feels smooth today.
see this here https://beratrax.org
Continue https://navigator-exchange.org/
a knockout post https://hyperliquid-wiki.cc
sites https://hyperliquid-wiki.cv
other https://hyperliquid-wiki.cc/
moved here https://cakepad.digital
click for info https://rangerfinance.xyz/
have a peek at these guys https://palladiumlabs.net/
hop over to these guys https://dexrp.wtf/
TimberCrest Studio Online – Creative layout and careful presentation make browsing a pleasure.
Go Here https://ethereal.credit
view it now https://safeglobal.club
Premium Ethical Essentials – The store combines quality, care, and reliable service seamlessly.
you can try these out https://terminal.credit/
official source https://prjx.space
Full Article https://gluex.io/
click here now https://beratrax.org/
you can try here https://hyperliquid-wiki.cc
FFM Deals – Items arranged neatly, shopping is convenient and pleasant today.
navigate to these guys https://navigator-exchange.org/
sites https://g8keep.org
22bet
news https://hyperliquid-wiki.cv/
content https://kittenswap.buzz
Web Site https://yieldfi.pro
everydayshoppinghub – EverydayShoppingHub delivers a smooth, reliable browsing experience with an intuitive design.
these details https://ethereal.credit
hop over to here https://kittenswap.buzz/
he has a good point https://cakepad.digital/
hop over to these guys https://kittenswap.buzz/
try this site https://theo.exchange/
redirected here https://defi-money.cc/
anchor https://kinetiq.lat
pop over to this website https://looksrare.cfd/
have a peek at these guys https://gluex.io/
my latest blog post https://avalonfinance.cc/
Golden Root Hub – High-quality items presented neatly, browsing feels smooth and simple.
why not look here https://looksrare.cfd
visit this site https://avalonfinance.cc
published here https://dexrp.wtf
Home Page https://kinetiq.lat
Get More Info https://etherealtrade.rest
WildShore Curations – Items are well-picked and the shop layout makes browsing seamless.
their explanation https://beratrax.org/
see this https://prjx.online
Подключение интернета на дачу в области помогло решить множество бытовых вопросов. Теперь работает видеонаблюдение и онлайн сервисы. Мобильный интернет стабилен и не подводит. Установка выполнена профессионально. Результатом полностью довольны – https://podklychi.ru/
try this https://plasma.credit/
find this https://royco.cc
useful site https://cakepad.digital/
hop over to this web-site https://arch.credit
Discover More https://safeglobal.club
look at here now https://safeglobal.club
hop over to these guys https://theo.sbs/
your best finds – Selection looks appealing, site layout is easy to navigate.
купить аттестат о среднем образовании иркутск купить аттестат о среднем образовании иркутск .
look at here https://palladiumlabs.net
BloomStreet Picks – A crisp theme with bright touches gives shoppers a steady, pleasant experience.
More Info https://avalonfinance.cv
top article https://toast-wallet.net/
navigate to this web-site https://camelot.click/
find more info https://boros.cfd/
go to this web-site https://toast-wallet.net
check my reference https://d2finance.cv/
More Help https://d2finance.cc/
why not try these out https://berapaw.org
look at here now https://terminal.credit/
Visit Your URL https://kittenswap.cc/
description https://hlp0.cloud/
other https://liquity.cfd/
Continue https://dexrp.buzz
click site https://etherealtrade.xyz
site link https://kittenswap.cc
official website https://etherealtrade.lat/
her response https://navigator-exchange.org/
Wild Rose Emporium Online – Lovely boutique with a charming feel, discovered several nice surprises.
pop over to this website https://arch.credit/
Dans un monde ou les savoirs minoritaires trouvent difficilement leur espace, cet espace s’impose comme un acteur cle en reinventant les formats de creation et de partage. Cette ressource unique met en lumiere des thematiques souvent ignorees.)
A travers la valorisation de la maladie comme partenaire creatif, cet espace propose une plateforme enrichissante pour approfondir ces themes.
Que ce soit a travers des articles specialises, des reflexions collectives ou des collaborations artistiques et ouvrent la voie a des dialogues encore inexplores.
Le site est regulierement enrichi par des contributions d’experts et acteurs varies, et s’adapte continuellement aux mutations des savoirs et des pratiques.
https://tram-idf.fr/evenement/julien-ribeiro-apres/
Design Lifestyle Picks – The clean design layout makes exploring items a pleasure.
article https://g8keep.org/
modernartisanfinds – ModernArtisanFinds showcases stylish, handcrafted items alongside modern designs effortlessly.
blog https://d2finance.cv
look at this now https://terminal.credit/
Urban Life Finds Hub – Well-structured pages with stylish items and seamless browsing experience.
view https://royco.cc
click over here now https://cakepad.digital
i was reading this https://toast-wallet.net
you could look here https://rangerfinance.xyz/
Fashion Lifestyle Hub – Stylish lifestyle items displayed neatly, browsing feels smooth and enjoyable.
why not find out more https://snake.credit/
22bet
Web Site https://looksrare.cfd
blog here https://jaxx-web.org
check https://theo.sbs/
look at this site https://ethereal.credit
a knockout post https://etherealtrade.xyz
browse around these guys https://arch.credit
Get More Info https://hyperliquid-wiki.cc/
weblink https://hyperliquid-wiki.cc/
visit the site https://theo.exchange
Curated Experience Hub – Items are well-presented and the navigation feels effortless.
navigate to these guys https://kittenswap.cc/
i thought about this https://snake.credit
Visit Your URL https://etherealtrade.xyz/
I appreciate the practical examples you always include.
More about the author https://hlp0.online/
continue reading this https://avalonfinance.cc
hop over to here https://terminal.credit/
important source https://hypperswap.space
his explanation https://beratrax.org/
look at here https://prjx.space/
why not look here https://dexrp.buzz
her response https://kittenswap.cc/
check out this site https://hypperswap.cloud
about his https://hypperswap.cloud/
Современная Стоматология в Воронеже лечение кариеса, протезирование, имплантация, профессиональная гигиена и эстетика улыбки. Квалифицированные специалисты, точная диагностика и забота о пациентах.
CommunityHubStore – Well-organized products, smooth browsing, and enjoyable user experience.
i loved this https://palladiumlabs.net/
visit the website https://plasma.credit
website link https://hypperswap.space
click here now https://hypperswap.cloud
important link https://palladiumlabs.net/
More hints https://usdai.cloud
next https://g8keep.org/
Click This Link https://avalonfinance.cc
like this https://safeglobal.club/
see this website https://beratrax.org/
more helpful hints https://hlp0.cloud/
visit here https://plasma.credit/
more tips here https://unich.icu
go to this web-site https://jaxx-web.org/
read review https://unich.icu
useful source https://jaxx-web.org/
top shopping corner – Selection looks fantastic, browsing feels effortless and quick.
Grand Forest Boutique – Well-curated items, giving a refined and seamless browsing experience.
Website https://palladiumlabs.net/
over here https://beratrax.org/
this hyperlink https://etherealtrade.lat/
web link https://etherealtrade.rest/
check this site out https://beraborrow.cc/
click this link now https://alchemix.center/
my blog https://palladiumlabs.net/
explorelimitlessideas – Inspires continuous creativity and innovation while providing useful resources and insights.
my site https://jaxx-web.org
view website https://etherealtrade.lat
this article https://hlp0.cloud/
Discover More https://plasma.credit
HighlandMeadow Creative – Pleasant, well-organized layout with a soothing atmosphere.
Website https://rangerfinance.xyz
pop over to these guys https://royco.cc
sites https://etherealtrade.lat
check this site out https://theo.sbs
site web https://toast-wallet.net
click resources https://prjx.space
you could try this out https://etherealtrade.rest
useful site https://boros.cfd
browse this site https://toast-wallet.net/
that site https://plasma.credit
visit the website https://etherealtrade.rest/
useful source https://etherealtrade.rest
i was reading this https://avalonfinance.cc/
browse around this site https://safeglobal.club/
check out this site https://gluex.io
Heritage Modern Picks – The interface is clear, highlighting products with both classic and modern appeal.
Find Out More https://terminal.credit
find https://daodao.cfd
go to website https://daodao.cfd/
look at this website https://safeglobal.club
their website https://terminal.credit/
Source https://avalonfinance.cv/
Get More Info https://theo.exchange
Go Here https://yieldfi.pro
he has a good point https://kittenswap.cc/
more tips here https://g8keep.org/
additional hints https://dexrp.wtf/
see it here https://snake.credit
click https://toast-wallet.net
site here https://theo.exchange
baccarat
visit this website https://avalonfinance.cc
her comment is here https://avalonfinance.cc
from this source https://camelot.click/
moved here https://camelot.click/
FLO Online – Fashion deals displayed nicely, browsing feels simple and pleasant.
site link https://beraborrow.cc
bestfindshub – BestFindsHub features a handpicked assortment that ensures a pleasant shopping experience.
look here https://hyperliquid-wiki.cc
redirected here https://plasma.credit
pop over to this website https://alchemix.center
great post to read https://toast-wallet.net/
read this https://usdai.cloud/
check this https://jaxx-web.org/
Check Out Your URL https://yieldfi.pro/
Urban Trend Corner Hub – Clearly displayed items and intuitive navigation enhance user experience.
BoutiqueGiftStore – Well-organized products, smooth browsing, and easy-to-use interface.
why not try this out https://prjx.space
click this over here now https://hyperliquid-wiki.cv/
BrightCrest Corner – A minimalist design with standout items creates a straightforward, pleasant flow.
discover this https://toast-wallet.net/
useful site https://theo.exchange
article source https://hyperliquid-wiki.cc/
Read Full Report https://liquity.cfd/
look at this website https://d2finance.cv/
Everglen Picks – Enjoyed the relaxed layout, made it simple to scan through everything.
webpage https://liquity.cfd/
published here https://yieldfi.pro/
Dit artikel is een must-read voor iedereen.
click site https://alchemix.center
look here https://etherealtrade.xyz/
discover this info here https://navigator-exchange.org/
have a peek here https://toast-wallet.net
find out here now https://snake.credit/
useful reference https://liquity.cfd/
dig this https://hyperliquid-wiki.cv/
additional reading https://kittenswap.buzz
additional resources https://hyperliquid-wiki.cv
check it out https://terminal.credit/
next page https://etherealtrade.xyz/
more tips here https://d2finance.cv/
resource https://d2finance.cv/
he has a good point https://jaxx-web.org
additional reading https://theo.exchange/
Website https://plasma.credit/
directory https://dexrp.wtf
shopper’s delight corner – Selections are eye-catching, browsing feels smooth and enjoyable.
official source https://d2finance.cc
go to this site https://hlp0.online/
Check This Out https://alchemix.center
visit here https://hyperliquid-wiki.cc
pop over to this web-site https://berapaw.org
like this https://prjx.online/
Extra resources https://avalonfinance.cv/
visit https://hlp0.online
Continue https://terminal.credit
BluePeak Studio – Clean, modern design with a smooth browsing experience.
additional resources https://d2finance.cc
try this website https://unich.icu
get more https://navigator-exchange.org
right here https://kinetiq.buzz
internet https://d2finance.cc/
her explanation https://prjx.space/
you can check here https://rangerfinance.xyz/
pop over here https://theo.sbs/
visit homepage https://etherealtrade.lat
visit their website russian traditional clothing
visit this web-site https://d2finance.cc
you can look here https://etherealtrade.rest/
Curated Home Picks – The store feels special, with thoughtfully selected items throughout.
blog link https://looksrare.cfd/
useful content https://jaxx-web.org/
hop over to this website https://arch.credit
read https://kinetiq.buzz
next https://jaxx-web.org/
Resources https://toast-wallet.net
porno
browse around here russian traditional clothing
official source https://jaxx-web.org
blog here https://toast-wallet.net/
contemporarybuyhub – ContemporaryBuyHub offers a stylish collection with well-presented product descriptions.
Хороший рейтинг казино реально помогает отсеять сомнительные сайты. Популярные онлайн казино Украины часто имеют одинаковые игры, но разные условия. Если интересуют казино с выводом, рекомендую казино с выводом денег. Там есть фильтрация. Топ казино Украины обычно формируется по выплатам и отзывам.
Честное онлайн казино всегда указывает условия вывода.
Лучшие казино в Украине чаще всего уже известны игрокам. Рейтинг лучших онлайн казино Украины полезен новичкам. Казино онлайн с выводом денег без проблем — редкость. Топ сайтов казино удобно использовать как ориентир.
website here https://toast-wallet.net
browse this site https://toast-wallet.net
click over here https://jaxx-web.org/
visit this site russian traditional clothing
review https://toast-wallet.net/
view https://toast-wallet.net/
Fashion Picks Outlet – Items appear well curated, browsing feels natural and effortless.
Modern Design Finds – Clean and inspiring presentation, browsing felt relaxing and simple.
find out https://jaxx-web.org
investigate this site https://jaxx-web.org/
check out this site https://toast-wallet.net
look here https://jaxx-web.org
visit homepage https://toast-wallet.net
navigate to this web-site russian traditional clothing
try this site https://toast-wallet.net/
Свая Труба гофрированная канализационная – оптимальный выбор для эффективного отвода сточных вод, предотвращающий засоры и обеспечивающий длительный срок службы.
DailyFashionHub – Trendy daily picks, easy to browse, and layout feels smooth.
look at this now https://jaxx-web.org
pop over to these guys https://toast-wallet.net/
investigate this site https://jaxx-web.org
Visit This Link https://toast-wallet.net/
my review here https://jaxx-web.org
blog https://jaxx-web.org
i thought about this https://jaxx-web.org/
look at this web-site https://toast-wallet.net
go to my blog https://jaxx-web.org
go to this site https://toast-wallet.net
Daily Collection Online – Fast-loading pages and well-arranged daily products make exploration simple.
check this link right here now russian traditional clothing
Source https://toast-wallet.net/
website here https://jaxx-web.org
go https://jaxx-web.org/
official statement https://jaxx-web.org
find out here https://toast-wallet.net
Web Site https://toast-wallet.net
site russian traditional clothing
check my blog https://toast-wallet.net/
Resources https://jaxx-web.org
Visit Your URL https://jaxx-web.org/
look at this site https://jaxx-web.org
learn the facts here now https://toast-wallet.net/
visit homepage https://toast-wallet.net
Recommended Reading https://toast-wallet.net
discover here https://toast-wallet.net/
read this post here https://jaxx-web.org/
check my blog https://jaxx-web.org
SoftSky Hub Online – Peaceful, tidy setup with soft colors, browsing was effortless.
Go Here https://toast-wallet.net
important source https://jaxx-web.org
see this site https://jaxx-web.org/
over at this website https://jaxx-web.org/
website link https://jaxx-web.org/
click to find out more https://toast-wallet.net
try this site https://toast-wallet.net
official website https://toast-wallet.net
site link https://jaxx-web.org/
get redirected here https://toast-wallet.net
site https://jaxx-web.org
Design & Style Hub – Elegant product display with clear sections and intuitive browsing.
visit this site right here https://toast-wallet.net
next page https://toast-wallet.net
read more https://toast-wallet.net/
Full Report https://toast-wallet.net/
anchor https://jaxx-web.org
you can check here https://toast-wallet.net/
Lifestyle Essentials Marketplace – Easy navigation with a wide range of appealing modern items.
visit here https://jaxx-web.org
right here https://toast-wallet.net/
FashionBright Trail – Neatly arranged sections and stylish displays keep things appealing.
go to this website https://jaxx-web.org/
click site russian traditional clothing
have a peek here https://toast-wallet.net/
navigate to these guys https://jaxx-web.org/
a fantastic read russian traditional clothing
next page russian traditional clothing
find out https://toast-wallet.net
about his https://toast-wallet.net
you can find out more https://toast-wallet.net/
helpful site https://jaxx-web.org/
take a look at the site here https://jaxx-web.org
Design Focused Hub – Offers creative selections with a clean layout, browsing felt effortless and smooth.
see page https://toast-wallet.net/
additional hints https://toast-wallet.net
Artisan at GoldenPeak – A lovely range of handcrafted items, and the site felt easy to move through.
Fashion Trend Collections – Items look modern and organized, shopping feels effortless and pleasant.
article https://jaxx-web.org
findnewperspective – Great platform for shifting mindset and exploring new ways of thinking.
index russian traditional clothing
i thought about this russian traditional clothing
best site https://toast-wallet.net/
why not find out more https://toast-wallet.net/
link https://jaxx-web.org
find out here now russian traditional clothing
over at this website https://toast-wallet.net/
internet https://toast-wallet.net
you can look here https://toast-wallet.net
Extra resources https://toast-wallet.net
click this site https://jaxx-web.org
sites russian traditional clothing
заклепки вытяжные цена
Clicking Here https://jaxx-web.org/
click to find out more russian traditional clothing
his response https://jaxx-web.org/
click to find out more https://toast-wallet.net/
Read Full Report https://jaxx-web.org/
more info here russian traditional clothing
discover this https://toast-wallet.net/
check https://jaxx-web.org/
article russian traditional clothing
visit the site https://jaxx-web.org
click reference https://jaxx-web.org
look these up https://toast-wallet.net/
click this link now https://jaxx-web.org/
click now https://jaxx-web.org/
my review here https://toast-wallet.net/
see this site russian traditional clothing
imp source https://jaxx-web.org/
pin up depozit bonusi https://pinup5014.ru
GoldenMeadow Studio Online – The cozy ambiance and curated selections make browsing enjoyable.
you can check here https://toast-wallet.net
go to my site https://jaxx-web.org
my company https://toast-wallet.net/
go to this web-site https://jaxx-web.org/
straight from the source russian traditional clothing
click here for more info https://toast-wallet.net/
get redirected here https://toast-wallet.net/
helpful resources https://jaxx-web.org
YourDaily Picks Online – Easy browsing, neatly presented items, and fast-loading pages throughout.
additional info https://toast-wallet.net/
i thought about this https://toast-wallet.net/
see page https://toast-wallet.net
Exceptional work, truly outstanding!
i loved this https://toast-wallet.net/
Related Site https://jaxx-web.org/
read review https://jaxx-web.org/
Curated Commerce Space – A thoughtfully designed space where navigation feels natural and easy.
check this site out https://jaxx-web.org
have a peek at these guys https://jaxx-web.org/
more tips here https://toast-wallet.net/
Daily Picks Collection – Each product is functional and thoughtfully presented for easy browsing.
check out here https://jaxx-web.org
Visit Your URL https://jaxx-web.org/
Extra resources https://toast-wallet.net/
why not try here https://toast-wallet.net/
hop over to here https://jaxx-web.org/
find out this here russian traditional clothing
try this website https://jaxx-web.org/
click to find out more https://jaxx-web.org
More Info https://jaxx-web.org
website link russian traditional clothing
Get the facts https://jaxx-web.org
discover this info here https://jaxx-web.org
check that russian traditional clothing
click here for more russian traditional clothing
go https://toast-wallet.net
website here https://jaxx-web.org/
my response https://toast-wallet.net/
premiumbuyhub – PremiumBuyHub offers an enjoyable shopping journey with well-presented and thoughtful items.
description https://jaxx-web.org
creativefindshub – CreativeFindsHub presents items chosen with care in a user-friendly browsing interface.
FVC Picks – Corner store options are appealing, shopping experience feels simple today.
right here https://toast-wallet.net
navigate to these guys https://jaxx-web.org
Our site russian traditional clothing
check this link right here now https://toast-wallet.net
Extra resources https://jaxx-web.org
Get More Info https://toast-wallet.net
navigate to this web-site https://jaxx-web.org
browse this site https://toast-wallet.net/
Clicking Here https://toast-wallet.net
get more https://toast-wallet.net/
website here https://toast-wallet.net/
see https://toast-wallet.net
find out this here https://toast-wallet.net
click for more https://jaxx-web.org
EverLine Picks – Items feel crafted with care, creating a pleasant browsing experience.
his comment is here russian traditional clothing
BrightWave Shoppe – A relaxed aesthetic and clear layout help users move through products comfortably.
find this russian traditional clothing
my company russian traditional clothing
you could check here https://toast-wallet.net
click for source russian traditional clothing
buildsmartdirection – Encourages strategic thinking and building momentum in the right direction.
Contemporary Artisan Hub – The site highlights creativity and craftsmanship with easy navigation.
Visit Your URL russian traditional clothing
Refined Living Store – Refined visuals with navigation that feels natural and smooth.
AutumnHill Deals – Charming place with a creative assortment, browsing felt effortless.
Future Market Path – Clean, modern pages with smooth transitions make exploring products effortless.
Find Out More russian traditional clothing
read review russian traditional clothing
view website russian traditional clothing
<Artisan Selects – Unique finds throughout, very pleasant and smooth shopping experience.
Discover More https://toast-wallet.net
great site russian traditional clothing
FBD Market – Deals look appealing, site browsing is easy and enjoyable.
our website russian traditional clothing
useful site https://toast-wallet.net/
Mossy Trail Treasures Online – Pleasant layout and earthy feel make exploring products calming.
why not look here https://toast-wallet.net
his response https://toast-wallet.net/
useful reference https://toast-wallet.net/
review russian traditional clothing
reference https://toast-wallet.net
see this page russian traditional clothing
Modern Lifestyle Picks – Easy navigation complements a diverse and stylish product collection.
view russian traditional clothing
More Bonuses russian traditional clothing
Futuristic Lifestyle Store – Modern aesthetic combined with clear structure and smooth page flow.
go to this web-site russian traditional clothing
toptrendingstore – TopTrendingStore is simple to use and has a huge range of products for every shopper.
these details https://toast-wallet.net
bitcoin address generator Passive income cryptocurrency schemes promise effortless wealth, yet caution is paramount; research any project thoroughly to avoid potential scams.
FullBloom Studio Market – Attractive, curated displays and a clear layout enhance the browsing flow.
FindBetterValue Online – Offers are well organized, exploring the products feels smooth.
designexplorehub – DesignExploreHub features a well-organized layout and smooth browsing with attractive selections.
original site https://toast-wallet.net/
our website russian traditional clothing
see this russian traditional clothing
go to my blog russian traditional clothing
SoftBreeze Online – Enjoyed the cool, calming look of the site, navigation felt effortless.
I’ve been using thca pre rolls daily on account of over a month now, and I’m truly impressed at near the uncontested effects. They’ve helped me judge calmer, more balanced, and less tense everywhere the day. My saw wood is deeper, I wake up refreshed, and even my pinpoint has improved. The quality is distinguished, and I cherish the sensible ingredients. I’ll obviously heed buying and recommending them to everyone I be aware!
original site russian traditional clothing
read the article https://toast-wallet.net/
More Info russian traditional clothing
discover here russian traditional clothing
his response russian traditional clothing
Check Out Your URL russian traditional clothing
Visit Your URL https://toast-wallet.net/
Curated Wellness Essentials – Every product is meaningful, and the browsing experience is calm and pleasant.
porno
click for source https://toast-wallet.net
official statement https://toast-wallet.net/
Globally Curated Picks – Internationally curated items with clean visuals and smooth navigation.
you can check here russian traditional clothing
view it https://toast-wallet.net/
see page russian traditional clothing
Global Creativity Market – Interesting products and an easy layout made exploring very pleasant.
explorefutureopportunities.click – Nice resource, content encourages exploring new options and learning efficiently.
view it now russian traditional clothing
Fresh Path Finds – The products feel carefully chosen, and the interface runs smoothly.
index http://portableairconditioningunitsremakuji.blogspot.com/2015/02/
сюда vodkabet онлайн казино
visit the site http://buffingmachinebenichitsu.blogspot.com/2017/05/
перенаправляется сюда vodkabet
проверить сайт https://tstops1.cc/
посетить сайт https://tstops1.cc
официальный сайт сукааа онлайн казино Sykaaa Casino – это, безусловно, игровая площадка с большим потенциалом. Яркий дизайн, широкий выбор игр, привлекательные бонусы и удобные платежные системы делают его достойным кандидатом для тех, кто ищет острых ощущений и возможности выиграть реальные деньги.
нажмите vodkabet
взгляните на сайте здесь водка бет
Sono impressionato dal tuo impegno per la qualità.
click this site http://optumpracticemanagementzumaguru.blogspot.com/2018/03/crest-asset-management.html
investigate this site http://ingenieriaymantenimiento.blogspot.com/2020/03/importancia-estrategica-del.html
посетить веб-сайт vodkabet
приложение сукааа казино В целом, “Большая Sykaaa Casino” выглядит как привлекательная площадка для тех, кто ищет новые возможности в мире онлайн-гемблинга. Простой старт через регистрацию и широкий спектр предложений делают его достойным внимания. Главное – помнить о разумном подходе и наслаждаться процессом игры.
выберите ресурсы vodkabet онлайн казино
sykaaa casino бонусы для новичков Если вы ищете возможность поиграть бесплатно и с азартом, то предложение от Sykaaa Casino, безусловно, заслуживает внимания. Это отличный шанс:
лучшие спа-отели Подмосковья
подробнее здесь vodkabet
подробнее vodkabet онлайн казино
Продолжение vodkabet онлайн казино
baccarat
this website http://boilerrepairsrimaise.blogspot.com/2017/09/average-cost-of-boiler-repairs.html
Learn More Here https://auto-szef.pl/%EF%BB%BFno-pay-seniors-singles-dating-online-sites/
sykaaa слоты В целом, Sykaaa Casino предлагает конкурентоспособный набор услуг для игроков, ориентированных на реальные ставки. Если вы готовы испытать свою удачу, это казино может стать вашим новым любимым местом для азартных развлечений. Главное – играть ответственно и помнить, что азарт должен приносить удовольствие, а не становиться источником проблем. Удачи за игровыми столами!
click now https://www.dieselenginetrader.biz/diesel-engine-average-life-expectancy/
go to this site http://es.knowledger.de/6097630/IngenieriaDeMantenimiento
Contemporary Home Picks – Stylishly presented items with an intuitive and pleasant interface.
Перейти на сайт зеркало водка бет
узнать больше зеркало водка бет
нажмите здесь https://tstops1.cc/
подробнее здесь vodkabet онлайн казино
этот контент водка бет
take a look at the site here https://webstatsdomain.app/d/www.maintenanceonline.org
подробнее здесь водкабет
World Explorer Shop – The assortment is engaging, and moving around the site feels intuitive.
нажмите здесь vodkabet
selectivemarketzone – SelectiveMarketZone showcases high-quality, thoughtfully arranged products for smooth exploration.
нажмите https://krab2a.at/
интернет vodkabet
интернет vodkabet
Смотреть здесь vodkabet
нажмите здесь https://krab2at.cc/
нажмите здесь https://krab2a.at/
содержание https://krab2a.at/
Подробнее здесь водка бет
нажмите https://krab2at.cc
WildRidge Bloom Modern – Natural aesthetic with bright touches, the shop was easy to explore.
взгляните на сайте здесь https://krab2a.at
перенаправляется сюда vodkabet онлайн казино
опубликовано здесь https://krab2at.cc
Смотреть здесь https://krab2a.at/
перейдите на этот сайт https://krab2at.cc
можно проверить ЗДЕСЬ зеркало водка бет
informative post https://betplay.sh/
страница https://krab2at.cc
содержание https://krab2a.at
Узнать больше https://krab2at.cc/
подробнее водка бет
здесь водкабет
Find Out More https://simpleswap.cc
подробнее водкабет
узнать больше https://krab2a.at/
Узнать больше водкабет
проверить сайт водка бет
узнать vodkabet
Смотреть здесь водка бет
my sources https://usdtswaptrx.com
сайт водкабет
мелбет скачать официальный сайт
Melbet по-прежнему является одной из самых узнаваемых букмекерских платформ России и СНГ: пользователям доступно скачать приложение, активировать промокод, получить бонус или фрибет и сразу перейти к ставкам. Игрокам доступна быстрая регистрация в один клик, рабочее зеркало для быстрого входа, мобильная версия и функциональное приложение для iPhone, iOS, Android и ПК. MelBet предлагает официальный доступ к ставкам на спорт, тото, казино, игровые автоматы и live-игры прямо сейчас, гарантируя стабильную работу сайта и высокую скорость обновлений.
Бесплатно скачать MelBet APK для Android можно на официальном сайте — apk корректно работает на новых и устаревших устройствах. Для устройств Apple приложение доступно в AppStore. После установки пользователь входит в личный кабинет, пополняет депозит, получает приветственный бонус или фрибет и переходит к игре. Система верификации и идентификации проходит быстро, гарантируя полный контроль над счётом и выводом денег.
Если основной сайт временно недоступен, рабочее зеркало открывает доступ к ставкам, казино и live-играм в полном объёме. С мобильного браузера доступна mobi-версия, которая работает даже на слабых телефонах и устаревших версиях iOS и Android.
Казино-раздел содержит игровые автоматы, слоты, фриспины, настольные игры и live-дилеров. У букмекерской конторы широкая линия: футбол, хоккей, лига ставок, киберспорт, UFC, NBA и другие дисциплины. Любой купон можно собрать в один клик, а коэффициенты остаются конкурентными. Постоянные клиенты принимают участие в акциях, получают кэшбэк, бонусные средства и фрибеты, с удобными условиями отыгрыша.
Melbet — это сочетание мобильного удобства, стабильного зеркала, быстрого входа, русского интерфейса и официального статуса на территории России. Благодаря рабочим версиям для ПК, Android и iPhone, программа подходит для всех — новичку или профессионалу.
узнать больше vodkabet онлайн казино
подробнее https://krab2at.cc
нажмите здесь https://krab2a.at
Подробнее здесь https://krab2at.cc
посмотреть на этом сайте https://krab2at.cc
узнать больше Здесь водка бет
Смотреть здесь https://krab2a.at
click now https://cryptoarbitrage.sh/
опубликовано здесь водка бет
перенаправляется сюда https://krab2a.at/
узнать больше зеркало водка бет
здесь vodkabet онлайн казино
этот сайт водка бет
ссылка на сайт https://krab2at.cc/
узнать больше https://krab2a.at
Перейти на сайт https://krab2at.cc/
his response https://cdn-az.2020spaces.com/slots/funky-games.html
узнать больше Здесь https://krab2at.cc
посетить сайт зеркало водка бет
зайти на сайт зеркало водка бет
смотреть здесь зеркало водка бет
baccarat
SafePal Wallet is trusted for digital asset safety. The SafePal App makes crypto management convenient.
Safepal
узнать больше зеркало водка бет
этот контент водка бет
aviator игра 1win http://www.1win5522.ru
more helpful hints https://prlvnote.com
посетить сайт https://krab2a.at/
wikipedia reference https://onetlmesecret.com/
читать зеркало водка бет
каталог водкабет
узнать водка бет
like it https://cryptoarbitrage.sh/
узнать больше https://krab2at.cc
Refined Design Hub – Sleek interface with smooth page transitions and clean layout.
перенаправляется сюда зеркало водка бет
веб-сайт https://krab2at.cc
Смотреть здесь vodkabet
веб-сайте https://krab2a.at
этот сайт водкабет
взгляните на сайте здесь https://krab2at.cc
опубликовано здесь https://krab2a.at/
продолжить водкабет
click site http://ingenieriaymantenimiento.blogspot.com/2007/10/jornada-de-mantenimiento-industrial.html
лучшие экскурсии по Евпатории
Das kommt direkt in meine Favoriten.
подробнее здесь vodkabet
Discover More http://installationssakumuro.blogspot.com/2017/04/cheap-boilers-and-installations.html
look these up https://swapcrypto.biz
узнать https://krab2at.cc/
explorefreshstrategies.click – Encouraging messages, helps users gain new insights and refresh their planning approaches.
Best Offers Online – The promotions look attractive, and everything is structured in a user-friendly way.
Продолжение https://krab2at.cc
look at here https://cryptoconverter.biz/
найти это https://krab2a.at
выберите ресурсы водкабет
Продолжение водкабет
Следующая страница vodkabet
read here https://slmpleswap.app
Смотреть здесь водка бет
visit this web-site https://cryptoswap.cc
check these guys out https://onefimesecret.com
discover this info here https://onetimesecret.info
Источник водкабет
Подробнее https://krab2at.cc/
Our site https://simpieswap.app
advice https://cryptoswap.cc/
Главная https://krab2a.at
useful link https://cryptoswap.cc/
learn this here now https://simpieswap.app
Подробнее здесь https://krab2a.at/
Look At This https://onetimesecret.info/
сайт https://krab2a.at/
читать https://krab2a.at
здесь https://krab2a.at
look at more info https://prlvnote.com/
Visit Website https://simpieswap.app/
узнать больше Здесь водка бет
Continue http://www.bigcrowd.co.uk/%EF%BB%BFno-membership-newest-seniors-singles-dating-online-service
from this source https://swapzome.cc/
перейдите на этот сайт vodkabet
на этом сайте https://krab2at.cc
такой водкабет
check my site https://slmpleswap.app/
Подробнее здесь vodkabet
интернет https://krab2a.at/
get more https://cryptoswap.cc
Продолжение https://krab2a.at
hop over to this website https://onetlmesecret.com
такой водка бет
22bet
каталог https://krab2at.cc/
продолжить https://krab2a.at/
Продолжение зеркало водка бет
этот контент https://krab2at.cc/
веб-сайте https://krab2a.at/
посетить веб-сайт vodkabet
посмотреть на этом сайте https://krab2a.at/
navigate to this site https://findatwiki.com/Documentation
здесь vodkabet
Смотреть здесь https://krab2at.cc
этот сайт https://krab2a.at/
Go Here https://onetimesecret.info/
другие https://krab2at.cc
Узнать больше vodkabet онлайн казино
этот контент водка бет
узнать https://krab2a.at
web link https://simpleswap.cc/
Понравилось, что есть и расходники, и редкие запчасти для мотоциклов. Можно спокойно заказать нужные детали без лишних звонков zapchasti-dlya-motocikla.biz.ua. Магазин мото запчастей с нормальной поддержкой и консультациями.
Нравится, что магазин запчастей для мотоциклов работает по Украине. Приятно, что магазин не завышает цены. Мотозапчасти магазин с нормальной логикой сайта. Хороший интернет магазин мотозапчастей для постоянных покупок. Надежный вариант для покупки мотозапчастей. Один из немногих магазинов, куда хочется вернуться. Подходит как для города, так и для дальних заказов.
пояснения https://krab2at.cc
кликните сюда https://krab2a.at/
подробнее водка бет
подробнее https://krab2a.at/
Источник водкабет
you could try here https://enwikipedia.net/wiki/Documentation
посетить сайт vodkabet онлайн казино
нажмите https://krab2a.at
найти это vodkabet онлайн казино
Full Report http://boilerchidoran.blogspot.com/2017/09/xid-boiler-tubes.html
why not find out more https://onefimesecret.com
index https://cryptoswap.cc/
Intentional Living Shop – Intentional design choices that support easy navigation.
взгляните на сайте здесь https://krab2at.cc/
this contact form http://frigidairerefrigeratorpartsdoorhandle.blogspot.com/2017/09/capital-refrigeration.html
Recommended Site https://onetlmesecret.com
Перейти на сайт зеркало водка бет
Подробнее здесь https://krab2at.cc/
over at this website https://onefimesecret.com
his response https://crowncoinscasino.app/
на этом сайте зеркало водка бет
Moonlight Ridge Shop – Beautiful presentation throughout, found a few unique gems quickly.
сюда https://krab2a.at/
view https://cryptoswap.cc
additional resources https://usdtswaptrx.com/
кликните сюда https://krab2at.cc/
найти это https://krab2at.cc/
Узнать больше зеркало водка бет
intentionaldesignhub – IntentionalDesignHub showcases items in a welcoming layout that was simple to explore.
Смотреть здесь https://krab2at.cc/
I’ve been using https://www.nothingbuthemp.net/products/thc-sex-gummies-watermelon regular seeing that during the course of a month at the moment, and I’m indeed impressed at near the sure effects. They’ve helped me judge calmer, more balanced, and less restless in every nook the day. My saw wood is deeper, I wake up refreshed, and straight my nave has improved. The attribute is distinguished, and I cherish the natural ingredients. I’ll definitely heed buying and recommending them to the whole world I know!
check my source https://paradisearticle.com/website-list-1907/
Подробнее водка бет
такой https://krab2at.cc
read here https://cryptoconverter.biz/
найти это vodkabet онлайн казино
здесь vodkabet
взгляните на сайте здесь водка бет
выберите ресурсы vodkabet
выберите ресурсы https://krab2a.at
узнать больше водка бет
перейти на сайт зеркало водка бет
Узнать больше водкабет
узнать https://krab2a.at/
look at this web-site https://slmpleswap.app/
подробнее здесь vodkabet
pop over to this website https://swapcrypto.biz/
читать vodkabet
Learn More Here https://cryptoswap.cc/
click this link now https://onetlmesecret.com/
Главная https://krab2at.cc/
веб-сайт https://krab2a.at
next https://slmpleswap.app
другие vodkabet онлайн казино
веб-сайт vodkabet онлайн казино
click for more https://cryptoconverter.biz/
Главная https://krab2at.cc
his response https://prlvnote.com
опубликовано здесь водка бет
интернет vodkabet онлайн казино
содержание vodkabet онлайн казино
здесь https://krab2at.cc
читать https://krab2a.at/
Подробнее водкабет
посетить веб-сайт vodkabet онлайн казино
сюда https://krab2at.cc/
такой https://krab2at.cc/
a href=”https://refinedlifestylecommerce.click/” />Lifestyle Elegance Hub – Minimal design with organized products and seamless browsing experience.
пояснения https://krab2a.at/
содержание vodkabet
Продолжение водкабет
ссылка на сайт https://krab2at.cc
можно проверить ЗДЕСЬ https://krab2at.cc
проверить сайт https://krab2at.cc/
Читать далее https://krab2at.cc
Читать далее https://krab2a.at
перейдите на этот сайт https://krab2a.at
посетить веб-сайт https://krab2at.cc
перейти на сайт https://krab2at.cc
можно проверить ЗДЕСЬ vodkabet
More about the author https://swapzome.cc/
Следующая страница водка бет
нажмите https://krab2at.cc/
betlabel
blog link https://swapzome.cc
перейдите на этот сайт https://krab2a.at/
найти это https://krab2a.at/
Смотреть здесь vodkabet
сюда водкабет
нажмите здесь https://krab2at.cc
I have learn a few just right stuff here. Certainly price bookmarking
for revisiting. I wonder how a lot attempt you put to create this kind of great informative site.
узнать больше vodkabet онлайн казино
читать водкабет
Подробнее здесь зеркало водка бет
сайт водкабет
перейти на сайт водка бет
Подробнее vodkabet
кликните сюда vodkabet онлайн казино
продолжить водкабет
страница https://krab2a.at
Подробнее здесь vodkabet онлайн казино
проверить сайт https://krab2a.at
like this https://swapzome.cc/
в этом разделе https://krab2a.at/
Следующая страница https://krab2a.at/
important link https://crowncoinscasino.app
I’ve been using https://www.nothingbuthemp.net/products/indica-gummies daily on account of over a month now, and I’m justifiably impressed at near the absolute effects. They’ve helped me determine calmer, more balanced, and less anxious from the beginning to the end of the day. My forty winks is deeper, I wake up refreshed, and sober my core has improved. The trait is famous, and I appreciate the common ingredients. I’ll obviously keep buying and recommending them to the whole world I recall!
Подробнее водка бет
Главная vodkabet онлайн казино
UrbanField Designs Hub – Polished and creative, really enjoyed exploring all the featured pieces.
official statement https://simpieswap.app/
посмотреть в этом разделе https://krab2a.at
like this https://cryptoconverter.biz/
Creative picks store – The site feels imaginative, and items are showcased clearly and attractively.
Purposeful Home & Style – Well-arranged sections with smooth browsing and a clear layout.
Creative work hub – The site features professional presentation and clear organization of projects.
I’ve been using https://www.nothingbuthemp.net/collections/thc-gummies constantly seeing that all about a month now, and I’m indeed impressed during the positive effects. They’ve helped me feel calmer, more balanced, and less restless from the beginning to the end of the day. My sleep is deeper, I wake up refreshed, and even my nave has improved. The attribute is distinguished, and I cherish the natural ingredients. I’ll obviously carry on buying and recommending them to person I identify!
betlabel
designstylehub – DesignStyleHub features well-chosen, stylish products that make browsing smooth.
You’ve given me a lot to think about with this insightful comment.color game
Çevrim içi olarak kumar hizmetleri sunan platform, hem bahis hem porbet casino alanlarında oyunlara yer verir.
страница https://krab1l.at/
Creative picks store – The site feels imaginative, and items are showcased clearly and attractively.
Home Design Picks – Neatly displayed items with clean layout and fast browsing.
Professional design showcase – Visitors can explore projects effectively with a clear and polished presentation.
Read Full Report https://gateway.ipfs.cybernode.ai/ipfs/QmXoypizjW3WknFiJnKLwHCnL72vedxjQkDDP1mXWo6uco/wiki/Maintenance_engineering.html
перейдите на этот сайт https://krab1l.at/
бездепозитные бонусы за регистрацию в казино с выводом без пополнения 2024 без отыгрыша
baccarat
новые бездепозитные бонусы в казино за регистрацию с выводом без пополнения
как использовать бонус казино в 1win
explorefreshthinkingnow.click – Inspiring platform, content motivates creative solutions and thinking outside the box today.
navigate to this website http://installationssakumuro.blogspot.com/2017/04/cheap-boilers-and-installations.html
content https://cdnet.arre.co.in/casino/sexy-baccarat.html
бездепозитные бонусы казино в казахстане
Whats up very nice blog!! Guy .. Beautiful .. Wonderful .. I will bookmark your blog and take the feeds additionally? I am happy to seek out a lot of useful information here within the put up, we need develop extra strategies in this regard, thank you for sharing. . . . . .
Vicodin
check out here https://navigator-exchange.org
look here https://d2finance.cc/
Get More Info https://looksrare.cfd
explanation https://defi-money.cc/
additional hints https://hyperliquid-wiki.cc/
read this post here https://liquity.cfd/
Web Site https://alchemix.center/
look at here now http://businessmanagementdegreerikazari.blogspot.com/2016/07/uk-online-training-courses.html
Everyday use shop – The essentials offered are functional, and browsing feels natural and easy.
Event monitor portal – Organized updates and tools help users stay on top of all tracked events.
Contemporary Lifestyle Hub – Visually appealing layout with smooth transitions and structured browsing.
helpful site https://snake.credit
their explanation https://hypperswap.cloud
Recommended Reading http://boilerreplacementshisenba.blogspot.com/2017/08/boiler-replacement-wigan.html
you can look here https://ethereal.credit/
baccarat
Recommended Site https://d2finance.cc
informative post https://alchemix.center
important site https://d2finance.cc/
premiumdiscoverhub – PremiumDiscoverHub presents curated products with a polished touch that caught my eye instantly.
try this web-site https://etherealtrade.xyz
their explanation https://berapaw.org
click reference https://berapaw.org/
site https://safeglobal.club/
you can try these out https://prjx.space
check this https://hlp0.cloud
that site https://etherealtrade.xyz/
look at this site https://hlp0.cloud/
бездепозитные бонусы в казино казахстан
Learn More Here https://hypperswap.cloud/
why not try these out https://hyperliquid-wiki.cv/
my company https://rangerfinance.xyz
To jest dokładnie to, czego potrzebowałem.
Wildwood home treasures – Products are distinctive, with a layout that makes exploring enjoyable.
browse around here https://plasma.credit/
Michael D content hub – The platform makes exploring posts simple and enjoyable with clear navigation.
see this here http://portableairconditioningunitsremakuji.blogspot.com/2015/02/
Handcrafted Living Hub – A warm, handcrafted vibe paired with a tidy structure that makes exploring enjoyable.
read this post here https://d2finance.cv/
browse around this website https://g8keep.org/
browse this site https://berapaw.org
see post https://kinetiq.lat
website here https://hlp0.online
22bet
pop over to these guys https://hypperswap.space/
I’ve been using thc tincture daily for on the other side of a month now, and I’m indubitably impressed by the absolute effects. They’ve helped me perceive calmer, more balanced, and less tense in every nook the day. My saw wood is deeper, I wake up refreshed, and uniform my core has improved. The attribute is excellent, and I cognizant the common ingredients. I’ll obviously heed buying and recommending them to everyone I know!
в каком казино дают бездепозитные бонусы за регистрацию
visit our website https://etherealtrade.xyz/
click this over here now https://navigator-exchange.org/
check these guys out https://liquity.cfd/
here https://royco.cc
visit homepage https://arch.credit/
Check Out Your URL https://rangerfinance.xyz/
click here for info https://camelot.click/
в каком казино дают бездепозитные бонусы за регистрацию
Read Full Article https://hypperswap.space/
check my source https://yieldfi.pro/
discover this info here https://theo.sbs/
More Bonuses https://palladiumlabs.net
this link https://theo.exchange/
great site https://camelot.click/
Get More Info https://kinetiq.lat/
look these up https://plasma.credit/
blog here https://prjx.online
Urban finds store – The platform feels fresh, with trendy products that are simple to explore.
Milestone archive portal – Users can browse milestones and narratives efficiently with clear structure.
бездепозитные бонусы в казино 2026 новые
check here https://kinetiq.buzz/
hop over to this web-site https://usdai.cloud/
view it https://etherealtrade.lat/
more https://snake.credit
бонус за регистрацию без депозита в казино с выводом
check these guys out https://safeglobal.club/
другие https://krab1l.at/
нужна заклепка? заклепка вытяжная нержавеющая 3.2 надёжный крепёж для прочных и долговечных соединений. Устойчива к коррозии, влаге и перепадам температур. Подходит для металла, строительства, машиностроения и наружных работ.
22bet
additional resources https://kinetiq.buzz
culturebuycentral – CultureBuyCentral delivers a colorful range of products reflecting international styles.
creativemind.click – Resource guiding users to explore inventive concepts and embrace innovative thinking.
why not try here https://berapaw.org
Discover More Here https://royco.cc/
check these guys out https://looksrare.cfd/
additional resources https://g8keep.org
Find Out More https://g8keep.org/
go to these guys https://beraborrow.cc
Visual projects hub – Creative concepts are highlighted with eye-catching designs and clear presentation.
Pleasant finds store – Shopping feels natural and calm, with products that have a cozy appeal.
my site https://dexrp.wtf
pop over to these guys https://kittenswap.cc/
Continue russian traditional clothing
Подробнее купить права онлайн
Смотреть здесь томск ремонт стиральных машин
see this https://etherealtrade.rest
click https://rangerfinance.xyz/
22bet
page https://kinetiq.lat/
you could look here https://navigator-exchange.org/
посетить веб-сайт томск ремонт стиральных машин
this russian traditional clothing
index russian traditional clothing
click for info russian traditional clothing
modernculturecollective.click – This collective feels fresh, modern, and thoughtfully put together overall.
Read Full Report russian traditional clothing
Добре написано, продовжуй!
бездепозитные бонусы в казино за регистрацию
в этом разделе https://progunsupply.com/
этот контент томск ремонт стиральных машин
Discover the world of gambling with 777bet – your reliable partner in entertainment!
The platform offers a diverse selection of games that appeal to every kind of player.
these details russian traditional clothing
thinkcreatively.click – Hub motivating individuals to explore inventive approaches and consider fresh possibilities.
Explore Albany Ducks – Engaging content and vibrant updates make following the team exciting.
Refined home market – Smooth navigation highlights elegant products that feel thoughtfully chosen.
Перейти на сайт https://progunsupply.com
узнать https://progunsupply.com
Continue Reading https://beratrax.org
22bet
premiumdecorhub – PremiumDecorHub presents carefully selected products with clear details and effortless browsing.
посетить сайт томск ремонт стиральных машин
этот контент томск ремонт стиральных машин
каталог https://progunsupply.com/
blog link https://dexrp.wtf/
More Bonuses russian traditional clothing
hop over to here https://gta-san-andreas-apk.net/
browse around these guys https://kinetiq.lat/
try here russian traditional clothing
перейдите на этот сайт https://progunsupply.com
try this web-site https://plasma.credit
find out here https://hyperliquid-wiki.cv
Community tunes portal – Information on events, classes, and music resources is shared clearly and engagingly.
C’est l’article le plus utile que j’ai lu depuis des mois.
index https://ethereal.credit
Thank you for always being open and honest with your readers It’s refreshing to see a blogger who is unafraid to be vulnerable and real
Imaginative supply store – Engaging design and tools help users create and innovate effortlessly.
his response https://prjx.online/
I appreciate how this blog promotes self-love and self-care It’s important to prioritize our well-being and your blog reminds me of that
go to website https://boros.cfd
сайт томск ремонт стиральных машин
visit the website https://berapaw.org/
baccarat
futurefinder.click – Resource helping users discover new paths and actionable opportunities for advancement.
over at this website https://hyperliquid-wiki.cc/
refinedglobalmarket.click – Clean layout and well-presented products make browsing feel smooth today.
his response https://plasma.credit
you could look here https://kinetiq.buzz
my company https://unich.icu
look at more info https://boros.cfd
Trendy Buffalo hub – Engagement and sharing are seamless, making content participation fun.
try here https://boros.cfd/
useful content russian traditional clothing
why not find out more russian traditional clothing
Balanced home essentials – Browsing is gentle and effortless, with nature-inspired items presented clearly.
другие томск ремонт стиральных машин
click now https://prjx.space
visit russian traditional clothing
сайт томск ремонт стиральных машин
go to these guys https://alchemix.center/
milf porno
Нужен эвакуатор? вызов эвакуатора спб быстрый выезд по Санкт-Петербургу и области. Аккуратно погрузим легковое авто, кроссовер, мотоцикл. Перевозка после ДТП и поломок, помощь с запуском/колесом. Прозрачная цена, без навязываний.
official site https://beraborrow.cc
Нужны заклепки? заклепка вытяжная нержавеющая для прочного соединения листового металла и профиля. Стойкость к коррозии, аккуратная головка, надежная фиксация даже при вибрациях. Подбор размеров и типа борта, быстрая отгрузка и доставка.
globalbuyzone – GlobalBuyZone offers beautifully curated items that make browsing simple and enjoyable.
Actionable growth guide – Supports breaking plans into clear, executable steps
Текущие рекомендации: Куда сдать джакузи срочно — выгодная скупка за деньги быстро
Planning details site – The platform highlights development projects and urban layouts with clear content.
Organized picks store – The clean layout helps make each item easy to discover and use.
learnfast.click – Hub guiding rapid skill development and immediate implementation for success.
road chicken game
Progress planning guide – Provides practical advice for organizing steps and moving forward effectively
Visit Jammy K Speaks – Thought-provoking posts encourage readers to engage and share their opinions.
Soft living shop – A soothing layout enhances the experience, with products that are pleasant to browse.
Нужен эвакуатор? вызов эвакуатора петербург быстрый выезд по Санкт-Петербургу и области. Аккуратно погрузим легковое авто, кроссовер, мотоцикл. Перевозка после ДТП и поломок, помощь с запуском/колесом. Прозрачная цена, без навязываний.
I do not even know how I ended up here, but I thought this post was great.
I do not know who you are but definitely you are going to a famous blogger if you aren’t already 😉 Cheers!
a href=”https://authenticlivinggoods.click/” />authenticdailyhub – AuthenticDailyHub delivers well-chosen products that make exploring and shopping enjoyable.
бездепозитные бонусы казахстан за регистрацию в казино с выводом
futureideas.click – Hub guiding users to uncover creative solutions and implement forward-thinking strategies.
Olen etsinyt tätä tietoa kaikkialta.
Intentional action hub – Helps users take immediate, focused steps toward meaningful goals
казино онлайн в казахстане бонус за регистрацию без депозита
бездепозитные бонусы в казино олимп
goal progress roadmap – Helps organize next steps and maintain momentum toward success.
where to play Chicken Road
промокод на бездепозитный бонус в казино
Structured action platform – Helps maintain focus while achieving measurable progress
goal progress roadmap – Helps organize next steps and maintain momentum toward success.
1win aviator app uz 1win aviator app uz
focusplanner.click – Platform helping users structure steps to maintain momentum and reach objectives.
пин ап приложение не работает http://pinup5015.ru/
бездепозитные бонусы казино в казахстане
mindfuldiscoverhub – MindfulDiscoverHub features a clean, relaxing interface with items chosen for thoughtful living.
перейдите на этот сайт kush casino бонус
Momentum discovery hub – Offers insights to identify key momentum points and act decisively
forward progress roadmap – Provides structured advice for achievable and confident advancement.
бездепозитные бонусы в казино за регистрацию 2026
OpticalElegance – Professional design, site feels modern and makes service info easy to read.
Погрузитесь в захватывающий мир игры 1win avia и испытайте удачу прямо сейчас!
Ключевым моментом является эффективное управление своими финансами.
refinedinsights.click – Hub emphasizing high-quality curated material and thoughtful user participation.
Авто в ОАЭ https://auto.ae/ под ключ: продажа новых и б/у автомобилей, диагностика перед покупкой, регистрация и страховка. Прокат на сутки и долгосрок, включая премиум. VIP номерные знаки — подбор вариантов, торг, оформление передачи и сопровождение на русском.
purposeful learning roadmap – Encourages advancing with clear goals and mindful steps.
<Intelligent planning guide – Supports executing well-thought-out steps toward success
playboy888
This dedication to new content not only draws back existing users but also encourages active participation within the community.
посмотреть на этом сайте honey money casino регистрация
здесь хани мани казино официальный сайт
Try downloading the new version of 918kiss using 918kiss lama apk download and enjoy the exciting gaming process!
Current players are also rewarded with continual promotions that enhance gameplay.
BeautyOptics – Sleek and professional, service details are easy to understand and appealing.
Visit our website good day 4 play loginand discover exciting games!
Whether you prefer thrilling outdoor challenges or comfortable indoor games, options abound.
бездепозитные бонусы в казино за регистрацию с выводом
страница хани мани казино официальный сайт
mindfulbuyhub – MindfulBuyHub delivers ethical selections with seamless navigation and thoughtful organization.
measurable progress roadmap – Offers actionable advice to track and achieve results.
Lielisks saturs, saglabāts!
Intentional growth guide – Supports applying deliberate actions to achieve clear outcomes
зайти на сайт казино хани мани
бездепозитные бонусы за регистрацию в казино с выводом без пополнения по номеру телефона
бонус за регистрацию без депозита в казино с выводом денег бездепозитный
culturalinsights.click – Platform motivating exploration of international cultures and unique traditions.
можно проверить ЗДЕСЬ vbet brazil
TabitoRoutes – Travel articles are captivating, site structure makes exploring easy.
кликните сюда Отдыхай. Наслаждайся. Живи.
нажмите Отдыхай. Наслаждайся. Живи.
такой Время для ярких эмоций
Смотреть здесь Оторвись от рутины
нажмите здесь Отдыхай. Наслаждайся. Живи.
подробнее Уникальный опыт ждет тебя
подробнее Позволь себе перезагрузку
страница Позволь себе перезагрузку
ссылка на сайт Твой мир. Твои правила
Смотреть здесь Ощути вкус свободы
перенаправляется сюда Уникальный опыт ждет тебя
actionable planning roadmap – Helps organize steps clearly toward desired results.
можно проверить ЗДЕСЬ Включи отдых на максимум
посетить сайт Смело навстречу приключениям
Играйте в 1win авиатор и испытайте удачу в увлекательном мире авиационных приключений!
В заключение, 1win Aviator — это отличная игра для любителей азартных развлечений.
страница Позволь себе перезагрузку
This blog has become a part of my daily routine I start my mornings with a cup of coffee and your latest post
Looking forward to your next post. Keep up the good work!
этот контент зеркало vodka bet
Innovative ideas guide – Encourages exploring creative strategies for forward-looking progress
узнать больше Получай удовольствие от жизни
ссылка на сайт Идеальный день начинается здесь
посмотреть в этом разделе Отдыхай. Наслаждайся. Живи.
betlabel
пояснения Просто расслабься и наслаждайся
этот контент Время для души
нажмите здесь Позволь себе перезагрузку
ссылка на сайт Время для ярких эмоций
сайт Позволь себе перезагрузку
подробнее Просто расслабься и наслаждайся
проверить сайт Отдыхай. Наслаждайся. Живи.
посетить веб-сайт Отдыхай. Наслаждайся. Живи.
выберите ресурсы Идеальный побег от рутины
Immerse yourself in a fascinating world airplane game money and experience your passion right now!
In thrilling rounds, players have the opportunity to win substantial amounts or risk it all.
Читать далее Почувствуй вкус свободы
перенаправляется сюда Забудь о проблемах
здесь Просто расслабься и наслаждайся
страница Получай удовольствие от жизни
каталог Ощути вкус свободы
KoiFesScene – Vibrant festival content, updates and images are presented smoothly.
Подробнее vodkabet
здесь Забудь о проблемах
содержание Ощути вкус свободы
ссылка на сайт Моменты, которые останутся
читать Время для души
кликните сюда Получай удовольствие от жизни
подробнее здесь Уникальный опыт ждет тебя
взгляните на сайте здесь Уникальный опыт ждет тебя
веб-сайте казино водка
1win kazino o‘yinlari bepul 1win kazino o‘yinlari bepul
кликните сюда Твоё идеальное приключение
подробнее Твой отдых, твои правила
страница Твой мир. Твои правила
exclusivechoices.click – Platform featuring elegant, high-end items and seamless shopping experience.
читать Твоё идеальное приключение
посетить веб-сайт Твой отдых, твои правила
buildstrongrelationship – Clear strategies, content motivates consistent effort and mindful actions to strengthen bonds effectively.
1win profil sozlamalari 1win profil sozlamalari
выберите ресурсы водка бет
uniquebuyzone – UniqueBuyZone provided hidden treasures and a seamless shopping experience.
Перейти на сайт Оторвись от рутины
focused forward steps – Offers actionable tips for clarity and purposeful motion.
веб-сайт Уникальный опыт ждет тебя
здесь Твой отдых, твои правила
здесь Смело навстречу приключениям
нажмите здесь Моменты, которые останутся
Structured progress guide – Supports deliberate action-taking and continuous advancement throughout the day
Перейти на сайт Твой мир. Твои правила
узнать больше Здесь Отдыхай. Наслаждайся. Живи.
сайт Уникальный опыт ждет тебя
ссылка на сайт Включи отдых на максимум
baccarat
Источник Идеальный побег от рутины
сайт Включи отдых на максимум
опубликовано здесь Идеальный побег от рутины
каталог Моменты, которые останутся
кликните сюда Твой отдых, твои правила
сюда Живи, наслаждайся, мечтай
InsightfulBrains – Well-arranged content, site offers professional and actionable insights.
другие водка казино
узнать vbet casino
бездепозитные бонусы в казино
такой vbet poker онлайн
подробнее kraken маркетплейс зеркало
goal-oriented strategy ideas – Helps identify new paths to achieve meaningful outcomes.
этот контент kraken ссылка на сайт
Узнать больше kraken ссылка зеркало
проверить сайт кракен онион тор
бездепозитные бонусы в казино за регистрацию
узнать больше кракен ссылка
бездепозитные бонусы в казино за регистрацию с выводом без пополнения
узнать vodka bet
Opportunity analysis platform – Provides practical methods to find areas for growth and development
пояснения kraken darknet ссылка
нажмите здесь kraken актуальные ссылки
minotaur coin
смотреть здесь kraken сайт
узнать зеркало водка бет
узнать кракен ссылка kraken
читать kraken ссылка зеркало
узнать больше Здесь кракен onion сайт
Excellent article! Your points are well-articulated and persuasive.
перенаправляется сюда кракен ссылка
бездепозитные бонусы в казино
TrabasOnline – Clear organization, browsing content is smooth and informative.
baccarat
Продолжение kraken ссылка на сайт
смотреть здесь kraken onion ссылка
ideaforge.click – Platform emphasizing the creation of inventive concepts and actionable ideas.
перейти на сайт kraken маркетплейс зеркало
в этом разделе kraken маркетплейс зеркало
нажмите здесь kraken ссылка на сайт
найти это kra ссылка
взгляните на сайте здесь kraken darknet market
Подробнее кракен ссылка kraken
structured momentum guide – Offers practical tips to keep progress steady and well-organized.
веб-сайт kraken онион тор
другие vbet poker вход
зайти на сайт кракен ссылка
каталог kraken darknet
minotaurus presale
кликните сюда kraken onion зеркала
перенаправляется сюда vodkabet
нажмите здесь vbet poker онлайн
зайти на сайт kraken маркетплейс зеркало
Exploration platform – Supports uncovering new paths and exploring possibilities with clarity
Главная кракен ссылка onion
каталог kraken маркетплейс зеркало
можно проверить ЗДЕСЬ kraken onion зеркала
перенаправляется сюда kraken ссылка зеркало
посмотреть в этом разделе kraken рабочая ссылка onion
веб-сайте kraken сайт
этот сайт kraken onion зеркала
зайти на сайт kraken onion
сюда кракен онион
MotiviSoundHub – Engaging posts, site feels intuitive and easy to browse for music lovers.
посетить веб-сайт kraken darknet
перейдите на этот сайт kraken онион тор
продолжить kraken маркетплейс зеркало
22bet
Источник kraken маркетплейс зеркало
нажмите здесь кракен darknet
подробнее здесь кракен ссылка onion
semiconductor forum – Offers well-structured articles with actionable technical insights.
ссылка на сайт актуальные зеркала kraken
Thanks for the free trials. Got me hooked!
нажмите кракен ссылка onion
Продолжение kraken darknet ссылка
кликните сюда kraken актуальные ссылки
бездепозитные бонусы в казино
ссылка на сайт kraken onion зеркала
содержание kraken сайт зеркала
перейдите на этот сайт актуальные зеркала kraken
узнать больше kraken актуальные ссылки
Website https://lumi-wallet.io
Читать далее kraken сайт
click for more info https://jaxxwallet-web.org/
livingauthentically.click – Resource showcasing genuine goods to encourage thoughtful and intentional daily habits.
посмотреть на этом сайте kraken darknet market
зайти на сайт кракен onion сайт
Thank you admin.
Thank you admin.
Thank you admin.
ссылка на сайт kraken ссылка тор
кликните сюда kraken onion
узнать кракен онион
найти это кракен onion сайт
Thank you admin.
Thank you admin.
Thank you admin.
Thank you admin.
KidzNFTWorldOnline – Creative and visually appealing, site is simple to navigate.
перейти на сайт кракен даркнет
подробнее кракен ссылка
vpower apk download
Vpower APK is a popular application that has gained attention among users.
перейти на сайт kraken onion зеркала
ссылка на сайт kraken маркетплейс зеркало
22bet
1000 рублей за регистрацию вывод сразу без вложений в казино с выводом без депозита за регистрацию
читать kraken актуальные ссылки
можно проверить ЗДЕСЬ кракен ссылка
election rights awareness – Informative and concise, making the topic accessible to all.
High motion fluidity. Butter smooth.
интернет кракен онион тор
узнать больше kraken darknet
Full version of the article: https://brauakademie.com.br/art/cassinos-online-com-promocoes-para-jogadores.html
веб-сайте kraken onion ссылка
Your content is always reliable.
go to these guys https://lumi-wallet.io/
TrinkHalleChoice – Organized pages, finding items feels simple and convenient.
22bet
visit here https://jaxxwallet-web.org/
читать krab2.cc
посмотреть в этом разделе krab2.cc
веб-сайте маркетплейс
найти это кракен
игра в казино где бонус падают шарики
Узнать больше krab2.cc
интернет krab2.cc
игра в казино где бонус падают шарики
в каком казино дают бездепозитные бонусы
Следующая страница кракен
такой вход
сайт маркетплейс
нажмите здесь krab2.cc
Fast search results. Efficient discovery.
бонус за регистрацию без депозита в казино с выводом
нажмите, чтобы подробнее площадка
22bet
перенаправляется сюда krab3.cc
adfnews – Very informative, updates are clear and the site layout is professional.
this article https://toast-wallet.net
смотреть здесь krab2.cc
Смотреть здесь krab2.cc
другие krab2.cc
можно проверить ЗДЕСЬ krab2.cc
содержание krab2.cc
здесь вход
Продолжение krab2.cc
этот контент площадка
другие krab2.cc
melbet registration http://www.melbet5001.ru
подробнее здесь площадка
check that jaxx lizenz
1win yordam markazi 1win yordam markazi
baccarat
ErinKConnect – Very professional and personal, content is easy to read and visually nice.
посмотреть на этом сайте tripscan
my company jaxx liberty wallet
этот сайт капча
казино в котором есть бездепозитный бонус
узнать больше кра
проверить сайт krab 1at
大屁股 xxx 视频性爱色情
нажмите, чтобы подробнее как заработать биткоин с нуля на компьютере
подробнее здесь
купить криптовалюту сбер
опубликовано здесь krab1.at
выберите ресурсы кракен
узнать больше Здесь
как купить криптовалюту через
такой krab1.cc
see this site jaxx wallet online
веб-сайте кракен зеркало
Смотреть здесь
ghost криптовалюта где купить
ссылка на сайт kraken
веб-сайте krab 1 at
Подробнее
бот для торговли на покет опшен
узнать больше Здесь krab1.cc
веб-сайт трипскан сайт вход
подробнее какую криптовалюту купить дешево
такой кракен зеркало
посетить веб-сайт кошелек для криптовалюты купить в москве
подробнее кракен
нажмите, чтобы подробнее
как заработать через биткоин
кликните сюда кракен вход
бездепозитные бонусы в казино 2026
подробнее
купить криптовалюту за рубли без верификации
Bu saf altın, teşekkürler!
Смотреть здесь кракен
этот сайт
как официально торговать криптовалютой
нажмите krab1at
this content jaxx lizenz
содержание торговые роботы forex
такой krab1.cc
проверить сайт трипскан вход
содержание krab cc at
подробнее
где лучше купить криптовалюту в россии
Перейти на сайт магазин
узнать больше krab1.at
перейти на сайт krab1cc
нажмите krab 1at
Источник krab 1 at
growth roadmap organizer – Breaks down growth initiatives into clear, manageable steps
бонус за регистрацию без депозита в казино с выводом
можно проверить ЗДЕСЬ krab 1 at
подробнее здесь
как правильно торговать фьючерсами криптовалюты
страница krab1.cc
посмотреть на этом сайте
биткоин как заработать
можно проверить ЗДЕСЬ
какую криптовалюту купить дешево
здесь
стоит ли торговать криптовалютой
выберите ресурсы krab 1 at
ссылка на сайт сайт трипскан
milf porno
ссылка на сайт как заработать 1 биткоин без вложений
выберите ресурсы kraken
каталог krab cc at
посетить веб-сайт
как заработать на биткоине с чего начать
этот сайт купить криптовалюту эфир за рубли
узнать купить леджер кошелек для криптовалюты
перенаправляется сюда tripscan
в этом разделе
стоит ли торговать криптовалютой
опубликовано здесь kraken
additional reading wallet jaxx
ссылка на сайт кракен зеркало
выберите ресурсы krab1cc
перейти на сайт как торговать с ии deep seek криптовалютой
веб-сайт кракен вход
выберите ресурсы krab 1 at
веб-сайте
ии бот для торговли
здесь
бот для торговли газом бесплатно
нажмите
заработать биткоины без вложений с нуля
опубликовано здесь сайт трипскан
этот контент
как купить криптовалюту без p2p
посетить веб-сайт
как торговать на бирже криптовалют для чайников
бездепозитный бонус за регистрацию в казино с выводом денег без первого депозита и без отыгрыша
The best is collected here: https://conogasi.org/accounting-com-occupation-training-and-you-can-jobs-information-buy-facebook-page-with-followers/
каталог krab1.at
содержание kraken
узнать больше krab1at
купить диплом ветеринарного врача с занесением в реестр http://www.r-diploma25.ru .
в каком казино дают бездепозитные бонусы за регистрацию
подробнее krab1cc
содержание krab1.at
в этом разделе
купить криптовалюту 3
в этом разделе кракен
сайт krab1 c
узнать больше купить криптовалюту в 2024
ссылка на сайт krab1.at
содержание кракен зеркало
веб-сайте
как заработать биткоины без
нажмите здесь krab1cc
другие
на какой платформе торговать криптовалютой
этот сайт
как заработать биткоины в пк симулятор
на этом сайте krab 1at
нажмите здесь купить криптовалюту 2025
Нужна косметика? корейская косметика оптом большой выбор оригинальных средств K-beauty. Уход для всех типов кожи, новинки и хиты продаж. Поможем подобрать продукты, выгодные цены, акции и оперативная доставка по Алматы.
ссылка на сайт krab1.at
посмотреть на этом сайте
торговал криптовалютой в казахстане
Главная krab 1 at
смотреть здесь купить криптовалюту в дубае
посетить веб-сайт торговый робот для облигаций
интернет как подключить торгового робота к бирже
Our most valuable: https://joell.in/articles/how-demo-games-work-online-casinos_1.html
здесь купить криптовалюту на долгосрок
продолжить krab1.at
ссылка на сайт трип скан
смотреть здесь tripscan
growth roadmap planner – Helps break down big goals into realistic, manageable steps
посмотреть на этом сайте krab1.at
узнать больше капча
Смотреть здесь кракен зеркало
нажмите здесь кракен
выберите ресурсы
купить криптовалюту с помощью карты
посмотреть на этом сайте krab cc at
best Bitcoin casino
продолжить
боты для торговли мемкоинами
здесь купить криптовалюту в екатеринбурге
Продолжение krab 1at
каталог krab1 c
на этом сайте
сколько дней нужно чтобы заработать 1 биткоин
веб-сайте кракен зеркало
подробнее kraken
посетить веб-сайт кракен
linked here jaxx lizenz
Узнать больше
что можно купить за криптовалюту в мире
интернет krab1at
найти это заказ торговых роботов
Читать далее кракен зеркало
этот контент бот для торговли на покет опшен
посмотреть на этом сайте kraken
Читать далее как купить криптовалюту в россии
продолжить где купить торгового робота
содержание
какую криптовалюту купить сейчас чтобы заработать
Смотреть здесь krab1at
подробнее здесь кракен зеркало
посетить веб-сайт кракен зеркало
узнать больше кракен зеркало
Смотреть здесь кракен зеркало
читать кракен зеркало
узнать где можно купить тонкоин криптовалюта
нажмите, чтобы подробнее krab cc at
каталог kraken
веб-сайте krab cc at
подробнее krab 1at
взгляните на сайте здесь krab1cc
этот контент кракен
этот сайт krab1.at
кликните сюда почему торгуют криптовалютой
подробнее купить криптовалюту переводом
этот сайт как торговать криптовалютой в россии 2025
содержание krab1cc
найти это krab1 c
здесь
в каком банке купить криптовалюту
Узнать больше как купить криптовалюту в россии на bybit
growth signal map – Offers a mapped view of signals to guide strategic growth
Смотреть здесь krab1cc
подробнее здесь кракен
Попробуйте свои силы в игра ракета 1win, и испытайте удачу в уникальном игровом процессе!
Казино Aviator представляет собой захватывающий игровой проект, предоставляющий возможность заработать.
ai chat porn
intentional momentum guide – Offers guidance to keep energy and effort aligned with objectives.
бонус за регистрацию без депозита в казино
growth strategy steering – Helps ensure long-term growth remains guided and intentional
Thanks for sharing. I read many of your blog posts, cool, your blog is very good.
https://kairblog.ru/
ecold
growth strategy planning hub – Central location to coordinate practical strategies and guidance
ecold
https://kairblog.ru/
goal-oriented momentum guidance – A practical framework for ensuring energy leads to results.
https://sykaaa-official-casino.website
https://sykaaa-official-casino.website
https://sykaaa-casino-website.fun
https://sykaaa-casino-website.fun
growth synthesis blueprint – Creates a clear plan by connecting key ideas and strategies
spin better
Посетите магазины где можно купить электровелосипед сегодня и найдите велосипед своей мечты!
Магазин велосипедов предоставляет всестороннюю услугу по подбору велосипеда для каждого клиента. Это место, где покупатели могут найти не только велосипеды, но и различные аксессуары и оборудование для них. Магазин велосипедов работает уже несколько лет и имеет репутацию надежного партнера для всех, кто любит велоспорт .
Магазин велосипедов предлагает бесплатную консультацию по выбору велосипеда для каждого клиента. Клиенты могут попробовать велосипеды перед покупкой, чтобы убедиться, что они подходят им идеально. Магазин велосипедов предлагает услуги по модернизации и кастомизации велосипедов.
Магазин велосипедов включает в себя большой выбор электровелосипедов и гибридных моделей. Каждая модель имеет свои уникальные характеристики и особенности. Магазин велосипедов сотрудничает с известными брендами и производителями, что гарантирует высокое качество продукции .
Магазин велосипедов имеет большой выбор запчастей и инструментов для велосипедов . Клиенты могут найти все, что им нужно для комфортного и безопасного?жения. Магазин велосипедов предлагает скидки и бонусы для студентов и пенсионеров.
Магазин велосипедов предлагает широкий спектр услуг, включая ремонт, обслуживание и настройку велосипедов . Клиенты могут быть уверены в высоком качестве выполненных работ. Магазин велосипедов также предоставляет услуги по заказу и поставке запчастей и аксессуаров .
Магазин велосипедов предоставляет возможность клиентам прокатиться на велосипеде под руководством опытного инструктора. Клиенты могут получить новые знания и навыки, что позволит им улучшить свое?жение. Магазин велосипедов предлагает скидки и специальные условия для членов велоклубов .
Магазин велосипедов предлагает всестороннюю услугу по подбору и обслуживанию велосипедов . Клиенты могут найти все, что им нужно для комфортного и безопасного?жения. Магазин велосипедов работает на рынке уже несколько лет и имеет репутацию надежного партнера .
Магазин велосипедов имеет программу лояльности и предлагает скидки постоянным клиентам . Клиенты могут быть уверены в высоком качестве продукции и услуг. Магазин велосипедов следит за последними тенденциями и нововведениями в области велоспорта .
execution flow lane – Provides guidance for keeping tasks progressing efficiently.
Если вам нужно пластиковые бутылочки оптом для ваших товаров, обратите внимание на различные варианты, доступные на рынке, и выбирайте то, что лучше всего соответствует потребностям вашего бизнеса.
Флакон опт является идеальным решением для бизнеса, производящего жидкие товары . Это позволяет компаниям снизить затраты на упаковку и увеличить прибыль. Флакон опт является универсальной упаковкой для жидких продуктов. Кроме того, флакон опт может быть легко транспортирован и хранен.
Флакон опт стал популярным выбором среди розничных продавцов и оптовиков . Это связано с тем, что флакон опт позволяет снизить количество отходов и энергопотребления. Флакон опт защищает продукты от солнечного света и влаги. Кроме того, флакон опт может быть легко заполнен и закрыт.
Флакон опт обеспечивает высокую степень защиты продукта. Это связано с тем, что флакон опт изготавливается из высококачественных материалов и имеет прочную конструкцию. Флакон опт также может быть легко персонализирован и брендирован . Кроме того, флакон опт может быть использован для различных видов жидких товаров.
Флакон опт используется многими компаниями для снижения количества отходов . Это связано с тем, что флакон опт может быть легко переработан и повторно использован. Флакон опт обеспечивает безопасное и надежное хранение жидких товаров . Кроме того, флакон опт может быть легко транспортирован и хранен.
Флакон опт подходит для широкого спектра применений, от личной гигиены до промышленного использования . Это связано с тем, что флакон опт имеет прочную конструкцию и может выдерживать различные условия хранения и транспортировки. Флакон опт также предлагает улучшенную защиту продукта от внешних факторов . Кроме того, флакон опт может быть легко заполнен и закрыт.
Флакон опт стал популярным выбором среди компаний, производящих жидкие товары . Это связано с тем, что флакон опт позволяет снизить количество отходов и энергопотребления. Флакон опт также предлагает улучшенную безопасность для потребителей . Кроме того, флакон опт может быть легко транспортирован и хранен.
Флакон опт обеспечивает высокую степень защиты продукта. Это связано с тем, что флакон опт изготавливается из высококачественных материалов и имеет прочную конструкцию. Флакон опт позволяет компаниям создавать уникальный дизайн и стиль . Кроме того, флакон опт может быть использован для различных видов жидких товаров.
Флакон опт стал популярным выбором среди компаний, производящих жидкие товары . Это связано с тем, что флакон опт позволяет снизить количество отходов и энергопотребления. Флакон опт обеспечивает безопасное и надежное хранение жидких товаров .
Viết rất hay, hãy tiếp tục phát huy!
https://sykaaa-casino-website.fun
betlabel
baccarat
baccarat
Looking for a casino? elon casino: slots, live casino, bonus offers, and tournaments. We cover the rules, wagering requirements, withdrawals, and account security. Please review the terms and conditions before playing.
нажмите, чтобы подробнее какие аккаунты можно продавать
каталог продать личный аккаунт
здесь продать аккаунт эпик геймс
выберите ресурсы kraken darknet ссылка
подробнее продать аккаунт гта
Смотреть здесь kraken ссылка тор
Главная сайт kraken darknet
Источник сайт kraken onion
Продолжение зачем продают аккаунты
Узнать больше продать аккаунт гта
22bet
сюда kraken актуальные ссылки
узнать больше kraken зеркало рабочее
веб-сайт продают ли аккаунты в танках
этот сайт сайт kraken darknet
веб-сайт продам аккаунт мобайл
нажмите, чтобы подробнее продам аккаунты яндекса
узнать больше можно ли продать аккаунт стим
сюда стоит ли продавать аккаунт
новости сегодня
Читать далее можно продать аккаунт world of tanks
взгляните на сайте здесь krab2.cc
можно проверить ЗДЕСЬ капча
выберите ресурсы продать быстро аккаунт бравл
читать магазин
сайт продать аккаунт клеш
нажмите здесь продать аккаунт стим быстро
в этом разделе продать аккаунт браво
страница продать аккаунт кс
посетить веб-сайт капча
интернет маркетплейс
смотреть здесь krab2.cc
Смотреть здесь krab2.cc
нажмите здесь за сколько можно продать аккаунт
ссылка на сайт продать быстро аккаунт бравл
Продолжение krab1.cc
веб-сайте продать аккаунт в геншине импакт
на этом сайте продать аккаунт ворлд оф танк
страница продать аккаунт pubg
опубликовано здесь продать аккаунт моментально
в этом разделе где продавать аккаунты игр
сюда где продать аккаунт бравл
найти это продать аккаунт standoff 2
посмотреть в этом разделе площадка
Ini layak mendapat lebih perhatian, penulisan cemerlang.
веб-сайт алиэкспресс цифровые товары продавать там
этот контент можно ли продавать аккаунты в россии
22bet
перенаправляется сюда Пин Ап официальный сайт
Hello, i feel that i saw you visited my web
site thus i got here to return the choose?.I’m attempting to
in finding issues to improve my website!I suppose its ok to use a few of
your ideas!!
подробнее casino pinup
нажмите pin up 634
перейдите на этот сайт Пин Ап официальный сайт
нажмите, чтобы подробнее пин ап казино
взгляните на сайте здесь pin up сайт
посетить веб-сайт Пин Ап кз
читать Pin Up регистрация
продолжить Pin Up регистрация
страница casino pin up
посмотреть на этом сайте пин ап вход
взгляните на сайте здесь pin up casino
Подробнее pin up 634
в этом разделе Pin Up kazino
можно проверить ЗДЕСЬ casino pin-up
узнать Pin Up kz
узнать больше casino pin up
сюда Pin Up регистрация
перейти на сайт Pin Up сайт
22bet
на этом сайте Пин Ап личный
в этом разделе пинап казино
learn the facts here now
batry game
Learn More
battery bet
найти это Pin Up зеркало
такой casino pinup
узнать больше pin up сайт
этот контент Пин Ап официальный
на этом сайте pin up 634
опубликовано здесь https://krab3a.cc
find out here now
battery game app
этот сайт krab2.cc
содержание pin up сайт
пояснения пин ап официальный сайт
подробнее Пин Ап
Подробнее здесь Pin Up вход
подробнее casino pin-up
his explanation
battery bet apk
Подробнее кракен
Читать далее pin up казіно
read this article
battery aviator
useful site
battery bet download
my website
battery aviator apk
why not check here
batery aviator game
from this source
online battery game
здесь вход
нажмите здесь https://krab3a.cc/
Читать далее пінап казіно
нажмите, чтобы подробнее Пин Ап
navigate to these guys
aviator game battery
navigate to these guys
batery download
нажмите здесь PinUp
Читать далее krab1.cc
Продолжение вход
этот контент casino pin-up
сайт пин ап казино
нажмите здесь казино пинап
Следующая страница Пин Ап официальный сайт
Смотреть здесь casino pin up
узнать pin up casino вход
browse around this site
baterybet login download
22bet
official statement
battery bet withdrawal problem
Смотреть здесь pinup casino
можно проверить ЗДЕСЬ Pin Up сайт
продолжить пінап казіно
пояснения пин ап официальный сайт
нажмите Pin Up официальный сайт
Подробнее кракен ссылка kraken
подробнее krab2.cc
узнать больше Здесь Пин Ап сайт
перейти на сайт krab2.cc
узнать больше Здесь Pin Up зеркало
узнать больше Пин Ап личный
интернет https://krab3a.cc/
посетить веб-сайт pin up casino
найти это pin up вход
зайти на сайт https://krab3a.cc
сайт Пин Ап официальный
my website
battery bet download apk
узнать больше Здесь Пин Ап
здесь Pin Up играть
нажмите Pin Up официальный
сайт Пин Ап официальный сайт
перейти на сайт krab2.cc
Смотреть здесь Пин Ап личный
Check This Out
battery bet helpline number
подробнее Pin Up сайт
взгляните на сайте здесь Пин Ап кз
click to read https://prm4u.com/
baccarat
здесь krab какой
сайт https://krab3a.at
другие krab cc
этот контент kra46 сс
нажмите здесь kraken официальный сайт
веб-сайте https://krab3a.at/
этот контент https://krab3a.cc
узнать krab at
Thank you admin.
Thank you admin.
здесь кракен сайт
опубликовано здесь https://krab3a.at
нажмите kraken вход
посетить сайт crab2.at
Источник kra46 сс
нажмите https://krab3a.cc/
сюда кра ссылка
Подробнее krab2 at
пояснения krab2.at
Если вы ищете выгодные варианты внутренние откосы из сэндвич-панелей, то профессиональный монтаж под ключ сделает ваш дом уютнее и теплее.
Они обеспечивают эстетичный вид и защиту от холода Сэндвич-панели представляют собой многослойный материал. Они построены из слоев, включая теплоизолятор и защитную оболочку. Установка откосов из сэндвич-панелей популярна благодаря своей простоте. Такой монтаж проходит быстро и не требует сложных инструментов
Откосы помогают в сохранении тепла в помещении. Их отсутствие приводит к потерям тепла и снижению комфорта Сэндвич-панели отличаются высокой прочностью. Они выдерживают механические нагрузки и не деформируются Это делает их идеальным выбором для современных ремонтов. Выбор сэндвич-панелей выгоден из-за их долговечности и экономичности.
Сэндвич-панели обеспечивают отличную теплоизоляцию. Такие панели удерживают тепло, снижая расходы на обогрев Материал устойчив к влаге и грибку. Такая устойчивость продлевает срок эксплуатации без ремонта Эстетика панелей добавляет шарма интерьеру. Они доступны в различных цветах и текстурах
Установка сэндвич-панелей экономит время. Процесс занимает минимум усилий и ресурсов Стоимость материалов остается доступной. Они предлагают высокое качество по разумной цене Это делает их популярным решением для ремонта. Выбор панелей оправдан их надежностью и выгодой.
Сначала подготавливается поверхность откоса. Первый шаг – это тщательная очистка для надежного сцепления. Затем нарезаются панели по требуемым размерам. Нарезка позволяет адаптировать материал к конкретным габаритам После этого они фиксируются с помощью крепежа. Фиксация происходит с использованием специальных элементов
Важно использовать качественные инструменты. Выбор инструментов влияет на конечный результат монтажа. Финальный этап включает отделку швов. Завершающие работы придают откосам аккуратный вид. Такой подход обеспечивает долговечность. Монтаж с учетом всех деталей продлевает срок службы
Цена установки откосов из сэндвич-панелей зависит от площади. Это основной фактор, влияющий на общую стоимость работ В среднем, стоимость начинается от 500 рублей за квадратный метр. Указанная сумма покрывает базовые этапы монтажа. Дополнительные факторы повышают итоговую цену. Это может быть сложность доступа или дополнительные материалы
Региональные различия влияют на ценообразование. В больших городах услуги стоят дороже из-за спроса Рекомендуется сравнивать предложения. Анализ цен ensures выгодное решение для клиента. В итоге, установка окупается за счет долговечности. Спин-шаблон для всей статьи представлен выше, где каждое предложение заменено на варианты в .
такой https://krab3a.at/
Откройте для себя многофункциональный кроссоверы тренажер, который идеально подойдет для интенсивных тренировок в зале или дома.
Запускайте процесс с простой разогревки
https://spinbetter.black/italy/
узнать больше https://krab3a.cc
интернет https://krab3a.cc/
продолжить https://krab3a.at/
посетить сайт https://krab3a.at
Следующая страница https://krab3a.at/
https://spinbetter.black/egypt/apk/
ссылка на сайт https://krab3a.at/
Подробнее https://krab3a.at
найти это https://krab3a.at
Distance covered, player workload and fitness data tracked
здесь https://krab3a.cc/
посмотреть в этом разделе https://krab3a.at/
https://linebet.games/
пояснения kraken сайт
зайти на сайт кракен сайт
узнать кракен войти
посмотреть на этом сайте kra46
пояснения kraken вход
Продолжение kraken ссылка
Смотреть здесь krab какой
опубликовано здесь krab какой
перейдите на этот сайт кракен сайт
Try your luck and enjoy the exciting game onswiminator slot, which will give you a sea of ??pleasure and bonuses.
Featuring five spinning reels and several paylines, the game creates numerous chances to win.
перенаправляется сюда krab2.cc
подробнее кра сайт
Visit 777bet casino and dive into the world of gambling with unique offers!
Its intuitive design and diverse game offerings are likely reasons for its expanding popularity.
https://livecasinohouse.games/ru/
Смотреть здесь kra46.at
продолжить кракен вход
Подробнее kraken сайт
Смотреть здесь kraken ссылка
нажмите kraken зайти
опубликовано здесь кракен войти
Смотреть здесь kra46
читать krab2 at
продолжить кракен ссылка
Подробнее kraken вход
пояснения kraken сайт
Timber Crest Finds Online – Creative vibe and nicely organized sections make browsing effortless.
взгляните на сайте здесь kraken зеркало
узнать больше kraken ссылка
перейдите на этот сайт kra46 сс
кликните сюда kraken сайт
Следующая страница kra46.at
найти это kraken официальный сайт
страница krab какой
узнать больше krab2.cc
подробнее здесь crab2.cc
https://888starz.plus/
Следующая страница кра сайт
click reference https://usdtswaptrx.com/
right here https://slmpleswap.app
Full Report https://simpieswap.app
original site https://usdtswaptrx.com
https://bit.ly/tyler-durden-1tyler-durden
my latest blog post https://usdtswaptrx.com
read this post here https://swapcrypto.biz/
his comment is here https://cryptoarbitrage.sh/
official source https://swapcrypto.biz
Discover More https://simpleswap.cc/
Wild Rose Boutique – The shop feels cozy, and I found a few lovely surprises.
Get More Info https://onetimesecret.info
go to the website https://prlvnote.com/
click to read more https://swapzome.cc/
my site https://crowncoinscasino.app/
click for more info https://cryptoswap.cc/
pop over to this web-site https://simpieswap.app
more info here https://onefimesecret.com
https://spinbetter.blue/es/
discover this info here https://cryptoswap.cc
you could try this out https://onetimesecret.info
Going Here https://crowncoinscasino.app
published here https://slmpleswap.app/
read more https://slmpleswap.app/
his comment is here https://simpleswap.cc
navigate to these guys https://simpleswap.cc
you can try here https://crowncoinscasino.app/
go right here https://simpieswap.app/
directory https://betplay.sh/
have a peek here https://cryptoarbitrage.sh/
Bonuses https://prlvnote.com/
go now https://simpleswap.cc/
my company https://cryptoconverter.biz/
More about the author https://cryptoarbitrage.sh/
Get the facts https://crowncoinscasino.app/
try this website https://cryptoarbitrage.sh
basics https://onetlmesecret.com
blog https://swapzome.cc/
ecold
his comment is here https://crowncoinscasino.app
straight from the source https://simpieswap.app
see here https://prlvnote.com
recommended you read https://cryptoconverter.biz/
Check This Out https://onefimesecret.com
hop over to this website https://simpieswap.app/
click resources https://onetimesecret.info
Discover More https://usdtswaptrx.com/
check over here https://onefimesecret.com/
https://bit.ly/tyler-durden-1tyler-durden
get redirected here https://swapzome.cc/
visit this page https://cryptoconverter.biz/
additional hints https://simpleswap.cc
spin better
you can look here https://betplay.sh
click reference https://simpleswap.cc
Going Here https://swapcrypto.biz/
read https://onetimesecret.info/
special info https://swapcrypto.biz
check my site https://swapzome.cc
Если вас интересует кератоконус что это, это заболевание характеризуется прогрессирующей деформацией роговицы глаза, что может существенно нарушить качество зрения.
Кератоконус – это серьезное глазное заболевание, которое поражаетouter слои роговицы, вызывая ее тоннение и изогнутость. Это заболевание может привести к значительному снижению зрения и требует тщательного лечения. Кератоконус часто обнаруживается у людей в возрасте от 10 до 30 лет. Симптомы могут включать размытое зрение, чувствительность к свету и снижение зрения при ночной езде.
Кератоконус – это состояние, при котором роговица становится тонкой и изогнутой, приводя к проблемам со зрением. Ранняя диагностика имеет решающее значение для эффективного лечения. Кератоконус требует своевременного лечения, чтобы предотвратить ухудшение состояния. Регулярные осмотры у офтальмолога помогают обнаружить заболевание на ранней стадии.
Кератоконус может вызывать ряд симптомов, включая снижение зрения и раздражение глаз. Диагностика кератоконуса включает в себя ряд специальных тестов. Диагностика кератоконуса может быть проведена с помощью компьютерного анализа роговицы. Ранняя диагностика позволяет начать лечение и предотвратить дальнейшее ухудшение зрения.
Диагностика кератоконуса проводится с помощью современных технологий, таких как конфокальная микроскопия. Тщательная диагностика имеет решающее значение для определения степени кератоконуса и выбора оптимального лечения. Лечение кератоконуса может включать в себя применение газопроницаемых линз или имплантацию коллагеновых кольцеобразных секций. Выбор метода лечения зависит от степени заболевания и индивидуальных особенностей пациента.
Лечение кератоконуса включает в себя применение специальных методов коррекции зрения и поддержание здоровья роговицы. Одним из наиболее эффективных методов лечения является ношение газопроницаемых контактных линз. Газопроницаемые линзы могут улучшить остроту зрения и снизить симптомы кератоконуса. Кроме того, могут быть применены хирургические методы, такие как имплантация коллагеновых кольцеобразных секций или трансплантация роговицы.
Хирургическое вмешательство может включать в себя имплантацию специальных устройств для поддержки роговицы. Целью лечения является достижение лучшего качества зрения и предотвращение дальнейшего прогрессирования заболевания. Регулярные осмотры позволяют обнаружить любые изменения в состоянии роговицы и своевременно скорректировать лечение. Своевременная коррекция методов лечения может помочь достичь лучших результатов и поддержать здоровье роговицы.
Прогноз кератоконуса может быть оптимистичным при ранней диагностике и своевременном лечении. В большинстве случаев, кератоконус можно эффективно лечить и улучшать качество зрения. Современные методы лечения, такие как имплантация коллагеновых кольцеобразных секций или трансплантация роговицы, могут значительно улучшить зрение. Однако, важно помнить, что кератоконус – это хроническое заболевание, которое требует постоянного мониторинга и коррекции методов лечения.
Пациенты с кератоконусом должны быть осведомлены о важности регулярных осмотров для поддержания здоровья роговицы. Кроме того, пациентам рекомендуется соблюдать все рекомендации офтальмолога и использовать назначенные методы лечения. Пациентам с кератоконусом рекомендуется быть активными в процессе лечения и работать в тесном сотрудничестве с офтальмологом. Своевременная диагностика, эффективное лечение и постоянный мониторинг могут помочь пациентам с кератоконусом улучшить качество жизни и сохранить здоровье роговицы.
site https://slmpleswap.app
article https://onetlmesecret.com/
see this site https://cryptoarbitrage.sh
browse around this web-site https://cryptoarbitrage.sh
published here https://cryptoarbitrage.sh/
my website https://onetlmesecret.com/
about his https://usdtswaptrx.com
More Help https://swapcrypto.biz/
betlabel
site web https://usdtswaptrx.com
Nice to meet you all here.
Interested in IT courses in Philippines.
They even have dance and sports programs.
Source:
кракен onion сайт
Hope this helps someone.
go to website https://betplay.sh
click here to read https://crowncoinscasino.app/
the original source https://swapzome.cc
anchor https://usdtswaptrx.com/
find https://cryptoconverter.biz
pop over here https://prlvnote.com/
important site https://onetlmesecret.com/
go to these guys https://betplay.sh/
go to this site https://cryptoswap.cc
Extra resources https://simpleswap.cc/
look here https://jaxx-web.org/
have a peek at this site https://jaxxwallet-web.org
Your blog has helped me through some tough times and I am forever grateful for your positive and uplifting content
anchor https://jaxxwallet-web.org/
baccarat
Clear, concise, and practical information. I appreciate how easy it is to follow.
why not find out more https://jaxxwallet-web.org
More about the author https://toast-wallet.net
Круиз из Дубая стал отличным вариантом зимнего отдыха, теплая погода, море и высокий уровень сервиса https://kruizy-po-persidskomu-zalivu.ru/
This was very helpful and well written. I’ll definitely come back to this site again.
like this https://jaxxwallet-web.org/
visit site https://toast-wallet.net/
look at here https://toast-wallet.net/
look at this now https://toast-wallet.net/
our website https://toast-wallet.net
click here for more info https://jaxxwallet-web.org/
Web Site https://jaxxwallet-web.org/
hop over to this site https://jaxxwallet-web.org
blog https://jaxxwallet-web.org/
Our site https://toast-wallet.net/
baccarat
try this website https://jaxx-web.org
like it https://toast-wallet.net/
Круиз оказался отличным способом познакомиться с морскими маршрутами Азии https://kruizy-iz-kataya.ru/
imp source https://toast-wallet.net/
My cat loves this scratching post. He uses it every day instead of scratching my sofa. SVG to PNG provides further context on this subject.
original site https://toast-wallet.net/
useful source https://jaxx-web.org/
Get More Info https://jaxxwallet-web.org
use this link https://toast-wallet.net
discover this info here https://toast-wallet.net/
You’ve provided a roadmap that I can follow with confidence.
their explanation https://jaxxwallet-web.org/
like it https://jaxxwallet-web.org
why not look here https://jaxx-web.org/
go right here https://jaxxwallet-web.org/
my explanation https://toast-wallet.net/
you could try these out https://toast-wallet.net/
look at this web-site https://jaxx-web.org
click here for more info https://toast-wallet.net
22bet
additional info https://jaxxwallet-web.org/
click to read https://toast-wallet.net/
my response https://jaxx-web.org/
click for info https://jaxxwallet-web.org/
check out here https://toast-wallet.net
go to this website https://toast-wallet.net
Recommended Reading https://toast-wallet.net/
visit our website https://toast-wallet.net
Immerse yourself in the world of exciting games and big wins with spingo88 slot on spingo88!
Players can expect more exciting features and games to come.
you can look here https://jaxxwallet-web.org/
Try your luck with jili spin casino and win a big prize today!
The platform features numerous games designed to entertain users while giving chances to win.
Homepage https://jaxxwallet-web.org
his explanation https://jaxxwallet-web.org/
777 bet online casino and dive into the world of gambling with unique offers!
The site is not only visually appealing but also highly functional, making gaming effortless.
выпускник детского сада диплом купить выпускник детского сада диплом купить .
find https://jaxxwallet-web.org
other https://toast-wallet.net
22bet
find here https://toast-wallet.net/
see post https://toast-wallet.net
Very useful information, explained in a simple and clear way. I found exactly what I was looking for.
see post https://toast-wallet.net/
Great explanation and very informative. You can tell a lot of effort went into this.
Clear, concise, and practical information. I appreciate how easy it is to follow.
useful source https://toast-wallet.net
22bet
pop over here https://toast-wallet.net
why not find out more https://jaxxwallet-web.org
22bet
Check out our new game on alo789 com, to try your luck and win big prizes!
This approach helps maintain user interest and encourages players to try out something new regularly.
baccarat
Discover the best slot machines with mrlucky88 login.
Collaborative projects and richer content offerings are part of the roadmap.
Для обеспечения контроля доступа на мероприятиях рекомендуем использовать контрольные бумажные браслеты контрольные, которые обеспечивают удобство и надежность.
Обращение к такому браслету — разумный подход к ежедневным проблемам
Для строительства или ремонта дома стоит выбрать качественный купить кирпич облицовочный ручной формовки, который прослужит долгие годы и придаст вашему дому уникальный внешний вид.
представляет собой уникальный строительный материал, изготовленный вручную. Этот тип кирпича производится без использования машин, благодаря чему кирпичи приобретают индивидуальность . Кирпич ручной формовки применяется в строительстве различных объектов, от жилых домов до общественных зданий .
Кирпич ручной формовки обладает высокими прочностными характеристиками, что делает его долговечным материалом . Процесс производства кирпича ручной формовки включает в себя ручную формовку и обжиг, обеспечивающие уникальные свойства материала . Кирпич ручной формовки используется в строительстве зданий, требующих высокой прочности и долговечности .
Кирпич ручной формовки обладает прочными связями между отдельными кирпичами, обеспечивая монолитность конструкции . Этот материал применяется в строительстве зданий, требующих высокой степени безопасности . Кирпич ручной формовки имеет ряд цветовых вариантов, позволяющих выбрать подходящий оттенок для каждого проекта .
Кирпич ручной формовки производится с применением натуральных материалов, что делает его экологически чистым . Этот тип кирпича обладает высокой тепловой массой, что позволяет ему аккумулировать и отдавать тепло . Кирпич ручной формовки характеризуется высокой степенью устойчивости к погодным условиям.
Кирпич ручной формовки обладает высокой прочностью и устойчивостью к нагрузкам. Этот материал получил широкое распространение в различных регионах мира . Кирпич ручной формовки обладает эстетической привлекательностью, что делает его популярным для облицовки фасадов .
Кирпич ручной формовки характеризуется высокой степенью устойчивости к погодным условиям. Этот тип кирпича обладает высокой тепловой массой, что позволяет ему аккумулировать и отдавать тепло . Кирпич ручной формовки включает в себя использование глины и других природных компонентов .
Кирпич ручной формовки обладает высокой прочностью и устойчивостью к нагрузкам . Этот тип кирпича применяется в строительстве жилых домов, общественных зданий и других объектов . Кирпич ручной формовки обладает эстетической привлекательностью, что делает его популярным для облицовки фасадов .
Кирпич ручной формовки производится с применением натуральных материалов, что делает его экологически чистым . Этот материал применяется в строительстве объектов культурного и исторического значения. Кирпич ручной формовки обладает высокой тепловой массой, что позволяет ему аккумулировать и отдавать тепло .
Immerse yourself in the world of excitement and winnings withvalor slots,where every spin brings pleasure and a chance to win a big jackpot.
With a focus on safe and fair play, Valor Casino fosters confidence among its guests.
https://linebet.games/
click resources https://jaxxwallet-web.org
Discover More Here https://jaxxwallet-web.org/
you could try these out https://jaxx-web.org
navigate to this web-site https://jaxxwallet-web.org/
useful content https://jaxx-web.org/
go to my site https://jaxxwallet-web.org/
discover here https://jaxx-web.org/
browse around this site https://jaxx-web.org
visit site https://jaxx-web.org/
view https://jaxxwallet-web.org/
pop over to this site https://jaxxwallet-web.org
browse around these guys https://jaxxwallet-web.org
More Help https://jaxxwallet-web.org/
you can try these out https://jaxxwallet-web.org/
website here https://jaxxwallet-web.org
best site https://jaxx-web.org
Лучшие нейросети для написания рэпа
try this web-site https://jaxxwallet-web.org/
look at these guys https://jaxx-web.org
на этом сайте https://forum.hpc.name/thread/d752/130367/kak-umenshit-chuvstvitelnost-mikrofona-v-naushnikah-razer-kraken-pro.html
Следующая страница https://forum.hpc.name/thread/f140/105977/migraciya-s-windows-server-2003-na-2012-poshagovoe-rukovodstvo.html
ссылка на сайт https://forum.hpc.name/thread/r301/108628/effektivnye-sposoby-bezvozvratnogo-udaleniya-dannyh-s-hdd-i-ssd.html
на этом сайте https://forum.hpc.name/thread/e362/130802/perenos-koda-s-arduino-na-stm32.html
Читать далее https://forum.hpc.name/thread/d632/73179/kak-vybrat-bazu-dannyh-dlya-sozdaniya-bot-programmy-i-integracii-s-c.html
этот контент https://forum.hpc.name/thread/c460/115356/ocenit-pk.html
на этом сайте https://forum.hpc.name/thread/b550/114484/vse-li-ok-v-komplektacii-za-10k.html
Перейти на сайт https://forum.hpc.name/thread/b701/120560/kakie-temperatury-doljny-byt-i-kak-nastroit-optimalnuyu-dlya-moey-sistemy-chastotu-vrashcheniya-kullera-na-videokarte.html
Источник https://forum.hpc.name/thread/u671/140221/generaciya-sinusoidy-na-stm32.html
посмотреть на этом сайте https://forum.hpc.name/thread/p721/109811/kak-ogranichit-dostup-k-ftp-dlya-polzovateley-s-pomoshchyu-iptables-na-linux.html
узнать https://forum.hpc.name/thread/v471/102153/ispolzovanie-regulyarnyh-vyrajeniy-dlya-proverki-simvolov-na-krayah-stroki.html
продолжить https://forum.hpc.name/thread/z671/125625/pochemu-ne-rabotaet-icq-na-kitayskom-ayfone-i-kak-eto-ispravit.html
сайт https://forum.hpc.name/thread/c131/96528/kak-ispravit-oshibku-pri-zapuske-react-na-windows.html
кликните сюда https://forum.hpc.name/thread/t600/69596/gde-nahodyatsya-kontrollery-modeli-i-predstavleniya-v-laravel-5.html
посетить сайт https://forum.hpc.name/thread/v902/70377/obrabotka-oshibok-pri-obhode-direktoriy-s-boost-filesystem.html
подробнее https://forum.hpc.name/thread/t120/85748/kak-sozdat-generaciyu-mira-kak-v-minecraft-sredstvami-unreal-engine.html
интернет https://forum.hpc.name/thread/n481/112089/konstruktor-idealnoy-operacionnoy-sistemy.html
веб-сайте https://forum.hpc.name/thread/q981/111797/sgenerirovat-chisla-i-poschitat-ih-srednee-arifmeticheskoe.html
сайт https://forum.hpc.name/thread/b881/138439/oshibka-pri-rabote-s-potokami-wtf.html
сюда https://forum.hpc.name/thread/v232/104714/kak-ispravit-problemu-s-otsutstviem-teksta-na-knopkah-i-elementah-interfeysa.html
в этом разделе https://forum.hpc.name/thread/z772/103411/kak-razobratsya-v-zashifrovannyh-otvetah-na-primere-programmy-testirovaniya.html
have a peek at this site https://jaxx-web.org
перейти на сайт https://forum.hpc.name/thread/p881/80343/ispolzovanie-tserversocket-i-tclientsocket-s-blokiruyushchimi-soedineniyami-v-delphi-dlya-peredachi-dannyh-cherez-com-automation.html
Смотреть здесь https://forum.hpc.name/thread/z900/109961/problemy-s-ustanovkoy-centos-7-cherez-bios-na-noutbuke-samsung.html
посетить веб-сайт https://forum.hpc.name/thread/c002/116238/kak-vosstanovit-sistemu-posle-virusnoy-ataki-blokiruyushchey-dostup-k-jestkim-diskam-i-prilojeniyam.html
этот контент https://forum.hpc.name/thread/b480/88959/chtenie-stroki-iz-fayla-na-assembler-s-ispolzovaniem-tasm.html
подробнее https://forum.hpc.name/thread/j222/73519/otpravka-soobshcheniya-cherez-vk-api-na-c.html
https://spinbetter.black/pakistan/
подробнее https://forum.hpc.name/thread/g540/106995/kak-napisat-skript-dlya-opredeleniya-harakteristik-pk-s-pomoshchyu-vbs.html
this content https://jaxx-web.org/
Перейти на сайт https://forum.hpc.name/thread/u762/139750/bystraya-sortirovka.html
другие https://forum.hpc.name/thread/n921/122108/nastroyka-routera-asus-adsl-n13-dlya-podklyucheniya-neskolkih-pk-cherez-lan.html
Главная https://forum.hpc.name/thread/l661/113423/master-klass-kak-sdelat-zapros-k-serveru-s-parametrami-v-json.html
посмотреть на этом сайте https://forum.hpc.name/thread/f791/139209/oshibka-object-variable-not-set-pri-obrabotke-dokumentov-agentom-v-lotus-notes.html
проверить сайт https://forum.hpc.name/thread/k510/71595/reshenie-oshibok-dostupa-pri-kompilyacii-asp-net-core-proekta.html
Смотреть здесь https://forum.hpc.name/thread/x231/70116/zavisanie-pri-vydelenii-soketa-vozmojnye-prichiny-i-resheniya.html
check it out https://jaxx-web.org/
webpage https://jaxx-web.org/
нажмите, чтобы подробнее https://forum.hpc.name/thread/e860/100711/realizaciya-proverki-avtorizacii-smtp-na-perl-s-ispolzovaniem-standartnyh-bibliotek.html
YOURURL.com https://jaxx-web.org/
посетить сайт https://forum.hpc.name/thread/m321/72267/rasstanovka-tochek-na-picturebox-i-nahojdenie-treugolnika-s-naibolshey-ploshchadyu-v-c-windows-forms.html
сюда https://forum.hpc.name/thread/i191/135549/kak-otpravit-cvetok-vo-franciyu-sohraniv-ego-v-celosti.html
ссылка на сайт https://forum.hpc.name/thread/y860/85892/kak-poluchit-rotaciyu-ot-kamery-v-unreal-engine.html
нажмите https://forum.hpc.name/thread/b282/74410/kak-poluchit-spisok-vidimyh-wi-fi-tochek-dostupa-na-compact-net-framework-3-5.html
этот сайт https://forum.hpc.name/thread/h020/113363/kak-nachat-programmirovanie-dlya-windows-phone-7-5-mango.html
в этом разделе https://forum.hpc.name/thread/b292/122407/kak-nastroit-wake-on-lan-cherez-mikrotik-dlya-udalennogo-probujdeniya-kompyutera.html
Узнать больше https://forum.hpc.name/thread/n162/124350/nastroyka-impulsnogo-nabora-na-ats-panasonic-hts824ru-s-ispolzovaniem-staryh-telefonov.html
Узнать больше https://forum.hpc.name/thread/m892/114632/kak-zapustit-xampp-kak-slujbu-chtoby-on-rabotal-bez-vhoda-v-uchetnuyu-zapis.html
интернет https://forum.hpc.name/thread/w770/100222/opredelenie-yazyka-interfeysa-polzovatelya-na-sayte-na-perl.html
перейти на сайт https://forum.hpc.name/thread/q490/85781/kak-ispravit-problemy-s-navmesh-v-unreal-engine-5-dlya-bolshih-obektov.html
Подробнее здесь https://forum.hpc.name/thread/m410/99102/kak-ogranichit-kolichestvo-novostey-v-opredelennoy-kategorii-na-dle.html
перейти на сайт https://forum.hpc.name/thread/k122/130505/kak-reshit-problemu-s-obnarujeniem-ip-kamery-na-kompyutere.html
выберите ресурсы https://forum.hpc.name/thread/g231/135420/ustanovka-drayvera-dlya-hp-laserjet-1160-na-windows-10-64-bit-i-nastroyka-setevoy-pechati.html
Следующая страница https://forum.hpc.name/thread/h030/68613/vydelenie-odnogo-simvola-kotoryy-vhodit-v-shablon-s-pomoshchyu-regulyarnyh-vyrajeniy.html
перейдите на этот сайт https://forum.hpc.name/thread/k800/100074/ustanovka-perl-s-bibliotekoy-curses-rukovodstvo-i-sovety.html
Узнать больше https://forum.hpc.name/thread/n692/123291/kak-nastroit-juniper-srx-poshagovoe-rukovodstvo.html
ссылка на сайт https://forum.hpc.name/thread/s401/132210/podskajite-pojaluysta-novichku.html
ссылка на сайт https://forum.hpc.name/thread/p300/92389/ispravlenie-oshibki-invalid-attempt-to-enter-a-generate-block-v-gpss-i-reshenie-zadachi-modelirovaniya.html
веб-сайт https://forum.hpc.name/thread/o220/88506/preobrazovanie-chisel-v-assemblere-ot-4-y-k-16-y-sisteme-schisleniya.html
страница https://forum.hpc.name/thread/l540/110596/nastroyka-vneshnego-ip-i-modema-v-rejime-prozrachnogo-mosta-v-opensuse.html
другие https://forum.hpc.name/thread/b282/74190/sozdanie-installyatora-dlya-proekta-napisannogo-v-monodevelop-na-opensuse-13-1.html
другие https://forum.hpc.name/thread/f330/136392/kak-vybrat-kofemashinu-na-dve-chashki-sovety-i-rekomendacii.html
этот контент https://forum.hpc.name/thread/c981/134965/kak-nayti-drayver-dlya-media-audio-controller-s-identifikatorom-pci-ven-8086-dev-244e.html
пояснения https://forum.hpc.name/thread/j320/88102/kak-pomestit-simvol-v-bufer-klaviatury.html
подробнее https://forum.hpc.name/thread/j562/144241/kak-prochitat-neskolko-elementov-s-odnim-nazvaniem-v-xml.html
узнать больше https://forum.hpc.name/thread/t021/111821/fayl-yadra-v-operacionnoy-sisteme-os-2-opisanie-i-naznachenie.html
проверить сайт https://forum.hpc.name/thread/v510/120113/pochemu-ne-rabotaet-pamyat-na-maksimalnoy-chastote.html
перейдите на этот сайт https://forum.hpc.name/thread/u890/106494/kak-nastroit-miganie-kursora-i-ego-cvet-v-mcedit.html
посмотреть в этом разделе https://forum.hpc.name/thread/h481/98342/kak-sokratit-url-stranic-v-joomla-pri-pomoshchi-modulya-chpu-atrio.html
нажмите здесь https://forum.hpc.name/thread/m311/109199/zavisaet-kompyuter-pri-prosmotre-video-v-linux-prichiny-i-resheniya.html
ссылка на сайт https://forum.hpc.name/thread/e100/123297/razlochka-3g-modemov-i-routerov-kak-razblokirovat-ustroystva-i-ispolzovat-s-drugimi-operatorami.html
нажмите, чтобы подробнее https://forum.hpc.name/thread/j571/112513/kto-mojet-protestirovat-sayt-na-macbook-ili-imac-s-safari.html
Продолжение https://forum.hpc.name/thread/n660/111358/reshenie-problemy-grub-i-windows-7-ne-vidyat-drug-druga.html
взгляните на сайте здесь https://forum.hpc.name/thread/e082/82761/primery-zaprosov-dlya-bd-tovarooborot-v-microsoft-access.html
сайт https://forum.hpc.name/thread/m571/72969/peredacha-listbox-kak-parametra-funkcii-v-c-cli-windows-forms.html
перейдите на этот сайт https://forum.hpc.name/thread/s190/120688/otsutstvie-zvuka-na-materinskoy-plate-foxconn-h61-mx-prichiny-i-resheniya.html
подробнее здесь https://forum.hpc.name/thread/q651/144351/opisanie-struktury-fak-student-i-reshenie-zadachi-po-sortirovke-i-filtracii-dannyh.html
веб-сайт https://forum.hpc.name/thread/g941/82948/vyvod-nakopitelnyh-i-pomesyachnyh-dannyh-v-microsoft-access.html
интернет https://forum.hpc.name/thread/z621/85292/vnedrenie-faylov-resursov-v-proekt-windows-phone.html
ссылка на сайт https://forum.hpc.name/thread/s531/115138/kak-sobrat-svoy-pk-dlya-raboty-s-setevym-oborudovaniem-i-programmirovaniem.html
перенаправляется сюда https://forum.hpc.name/thread/v920/67899/osobennosti-poiska-v-mysql-kak-pravilno-iskat-simvol-podcherkivaniya-v-phpmyadmin.html
Узнать больше https://forum.hpc.name/thread/t872/116642/kak-izvlech-ustroystvo-kotorogo-net-reshenie-problemy-s-neischezayushchim-vneshnim-ustroystvom.html
подробнее https://forum.hpc.name/thread/w840/77347/obedinenie-strok-iz-dvuh-faylov-s-ispolzovaniem-apache-spark.html
Читать далее https://forum.hpc.name/thread/w752/80252/kak-opredelit-zablokirovan-li-kompyuter-v-delphi.html
сайт https://forum.hpc.name/thread/b381/134068/kak-ispravit-problemu-s-klaviaturoy-kotoraya-sama-najimaet-klavishi.html
в этом разделе https://forum.hpc.name/thread/y382/109560/kak-voyti-v-sistemu-pod-root-v-ubuntu-i-mint-linux.html
нажмите, чтобы подробнее https://forum.hpc.name/thread/f150/144652/kak-vyvesti-pervye-neskolko-elementov-massiva-v-c.html
выберите ресурсы https://forum.hpc.name/thread/l761/68069/proverka-nalichiya-goroda-v-tablice-s-ispolzovaniem-php-i-jquery-autocomplete.html
посмотреть на этом сайте https://forum.hpc.name/thread/v970/137928/napisat-programmu-ustanovki.html
продолжить https://forum.hpc.name/thread/k632/105166/pochemu-ne-ustanavlivaetsya-java-v-windows-7-i-kak-reshit-problemu.html
проверить сайт https://forum.hpc.name/thread/q432/113400/nastroyka-vpn-na-symbian-belle-nokia-c7.html
в этом разделе https://forum.hpc.name/thread/k212/84643/sushchestvuet-li-visual-studio-dlya-razrabotki-na-mobilnyh-ustroystvah.html
Смотреть здесь https://forum.hpc.name/thread/u671/70451/proverka-sushchestvovaniya-i-otkrytie-tablicy-v-baze-dannyh-access-v-c-builder.html
посетить сайт https://forum.hpc.name/thread/m972/105379/oshibka-800b0100-centra-obnovleniy-windows-pri-poiske-obnovleniy-na-servere.html
пояснения https://forum.hpc.name/thread/h672/96340/napisanie-ui-testov-dlya-komponentov-angular-s-ispolzovaniem-karma.html
посетить сайт https://forum.hpc.name/thread/i482/77292/upravlenie-dostupnostyu-knopki-s-pomoshchyu-svoystva-enabled-v-java.html
1хбет промокод Активируйте промокод на http://47kg.kr/interpark/?code_promo___bonus_jusqu____130.html и заберите бонус до 32 500 рублей при регистрации для комфортной игры.
страница https://forum.hpc.name/thread/w831/87106/nujno-li-udalyat-intel-sdk-for-opencl.html
узнать больше Здесь https://forum.hpc.name/thread/w842/105078/kak-izmenit-imya-uchetnoy-zapisi-pri-ispolzovanii-smartlogon.html
здесь https://forum.hpc.name/thread/s772/91709/podgotovka-tehnicheskogo-zadaniya-dlya-avtomatizacii-polikliniki-chto-dobavit-v-tz-i-kakie-diagrammy-ispolzovat.html
узнать больше https://forum.hpc.name/thread/i401/144613/nayti-vse-deystvitelnye-resheniya-dannogo-bikvadratnogo-uravneniya.html
нажмите здесь https://forum.hpc.name/thread/l642/99116/kak-nastroit-prioritet-skladov-v-1s-bitriks-reshenie-dlya-upravleniya-ostatkami.html
здесь https://forum.hpc.name/thread/k472/72271/import-dannyh-iz-bazy-ms-sql-v-excel-s-ispolzovaniem-vb-net.html
проверить сайт https://forum.hpc.name/thread/s721/110991/reshenie-problemy-zavisaniya-arch-linux-na-etape-zagrujaetsya-nachalnyy-virtualnyy-disk.html
Следующая страница https://forum.hpc.name/thread/g641/140664/kak-dinamicheski-sozdavat-knopki-dlya-telegram-bota.html
этот сайт https://forum.hpc.name/thread/w000/85507/otkrytye-igrovye-dvijki-na-c-dlya-izucheniya-i-razrabotki.html
нажмите, чтобы подробнее https://forum.hpc.name/thread/c101/68608/kak-realizovat-priem-platejey-v-php-paypal-visa-webmoney.html
сайт https://forum.hpc.name/thread/k180/120901/kakoe-jelezo-nujno-dlya-zapisi-video-obzorov-strimov-rolikov.html
каталог https://forum.hpc.name/thread/i720/92518/realizaciya-schetchika-tonn-s-obnovleniem-ceny-v-realnom-vremeni-na-javascript.html
зайти на сайт https://forum.hpc.name/thread/k361/70136/prinuditelnoe-zavershenie-soketa-v-linux.html
веб-сайт https://forum.hpc.name/thread/z141/109194/kak-podklyuchit-3g-usb-modem-pantech-uml-290-v-opensuse-posle-obnovleniya.html
узнать https://forum.hpc.name/thread/i831/88271/sravnenie-bezznakovyh-chisel-v-assembler-bez-ispolzovaniya-cmp.html
кликните сюда https://forum.hpc.name/thread/e942/130826/kak-otredaktirovat-i-obedinit-videofayly.html
проверить сайт https://forum.hpc.name/thread/c380/87408/gde-nayti-wind-river-visionclick-7-0.html
Смотреть здесь https://forum.hpc.name/thread/e861/136050/kak-otpravit-soobshchenie-na-pochtu-pri-kompilyacii-v-c.html
зайти на сайт https://forum.hpc.name/thread/d101/117776/net-vozmojnosti-v-nastroykah-izmenit-chastotu-obnovleniya-monitora-vyshe-60-gc.html
опубликовано здесь https://forum.hpc.name/thread/w662/137896/zapusk-processa-s-argumentami.html
веб-сайте https://forum.hpc.name/thread/q460/94707/reshenie-problemy-s-otrisovkoy-neskolkih-obektov-na-canvas-s-unikalnym-vremenem-jizni.html
проверить сайт https://forum.hpc.name/thread/n652/115092/kak-sobrat-igrovoy-kompyuter-za-30-000-rubley.html
Смотреть здесь https://forum.hpc.name/thread/l912/115484/ustanovka-windows-cherez-boot-camp-i-virtualnye-mashiny-na-mac-nujno-li-ispolzovat-disk-s-macos.html
подробнее https://forum.hpc.name/thread/e660/78904/nahojdenie-proizvedeniya-elementov-massiva-mejdu-pervym-i-poslednim-otricatelnymi-elementami-na-free-pascal.html
такой https://forum.hpc.name/thread/c440/74673/umenshenie-kontura-figury-vnutr-na-3-mm-v-svg.html
сайт https://forum.hpc.name/thread/t490/72207/uznat-imya-dinamicheski-sozdannogo-picturebox-na-visual-basic-net.html
узнать больше Здесь https://forum.hpc.name/thread/a750/66716/vyvod-vseh-receptov-polzovatelya-iz-bazy-dannyh-s-pomoshchyu-php-i-mysql.html
подробнее https://forum.hpc.name/thread/w071/110211/pochemu-ne-zapuskayutsya-iksy-pri-vhode-v-sistemu-v-centos-7.html
Узнать больше https://forum.hpc.name/thread/e532/80617/ustanovka-taymauta-dlya-komponenta-twebbrowser-v-delphi.html
пояснения https://forum.hpc.name/thread/f260/89581/format-adresnost-sposob-adresacii-mashinnoy-komandy-sta-4032h-na-processore-kr580.html
выберите ресурсы https://forum.hpc.name/thread/o852/132000/amortizatory-v-stiralnoy-mashine-ardo-a1000x-zachem-oni-nujny-i-kak-pravilno-vybrat.html
ссылка на сайт https://forum.hpc.name/thread/y792/105297/pochemu-ne-obnovlyaetsya-antivirus-symantec-i-kak-eto-ispravit.html
узнать больше https://forum.hpc.name/thread/i492/97584/izvlech-put-do-fayla-ne-standartnoe.html
подробнее https://forum.hpc.name/thread/q171/140695/kak-vyvesti-posty-iz-bazy-dannyh-na-vseh-stranicah.html
подробнее https://forum.hpc.name/thread/c801/76480/obrabotka-zakrytiya-okna-cherez-krestik-v-pygame.html
веб-сайте https://forum.hpc.name/thread/c792/110920/ustanovka-arch-linux-pri-modemnom-podklyuchenii-k-internetu.html
посмотреть на этом сайте https://forum.hpc.name/thread/j162/140724/opredelenie-kodirovki-strok-v-assemblere.html
взгляните на сайте здесь https://forum.hpc.name/thread/d781/67474/arhitektura-klassa-avtorizacii.html
посмотреть на этом сайте https://forum.hpc.name/thread/e571/129794/snyat-dannye-s-acp-mikrofona.html
ссылка на сайт https://forum.hpc.name/thread/a072/90890/rsa-kriptosistema-pochemu-slojno-ugadat-zakrytyy-klyuch.html
нажмите здесь https://forum.hpc.name/thread/r642/77577/pochemu-konteyner-annotationconfigapplicationcontext-ne-vidit-biny-v-spring.html
можно проверить ЗДЕСЬ https://forum.hpc.name/thread/d362/71615/pochemu-v-putyah-windows-rabotayut-pryamye-sleshi.html
перейдите на этот сайт https://forum.hpc.name/thread/e921/74605/uskorenie-linq-to-sql-predkompilirovannye-zaprosy-entity-sql-i-optimizaciya-zaprosov.html
перейти на сайт https://forum.hpc.name/thread/t322/70262/rabota-s-argumentami-komandnoy-stroki-v-c-poisk-i-zamena-slova-v-fayle.html
здесь https://forum.hpc.name/thread/o591/77404/sozdanie-lineynogo-grafika-s-podskazkami-v-gwt-visualization.html
смотреть здесь https://forum.hpc.name/thread/f421/134404/upravlenie-shagovym-dvigatelem-s-ispolzovaniem-kontrollerov-siemens.html
Следующая страница https://forum.hpc.name/thread/p770/106985/terminalno-mojet-voyti-tolko-administrator-chleny-gruppy-administratorov.html
нажмите https://forum.hpc.name/thread/i371/137664/zadacha-juki-i-pauki-kak-reshit-zadachu-s-pomoshchyu-sistemy-uravneniy.html
страница https://forum.hpc.name/thread/z392/82404/skleivanie-rezultatov-funkcii-v-postgresql.html
читать https://forum.hpc.name/thread/e531/115382/pomogite-ocenit-jelezo-amd-athlon-64-x2-4000-elixir-ddr2-1gb-800mhz-pc6400-asus-m3n78-se-gembird-450w.html
такой https://forum.hpc.name/thread/y261/80522/ustranenie-bagov-tprogressbar-v-delphi-pri-otklyuchenii-effekta-plavnogo-zapolneniya.html
выберите ресурсы https://forum.hpc.name/thread/y720/95077/kak-realizovat-podsvetku-elementov-menyu-s-pomoshchyu-css.html
Читать далее https://forum.hpc.name/thread/m910/69457/problemy-s-otpravkoy-soobshcheniy-cherez-vk-api-messages-send.html
посмотреть на этом сайте https://forum.hpc.name/thread/h042/69357/kak-peredat-dannye-po-api-iz-formy-podpiski-integraciya-s-sistemoy-rassylok.html
веб-сайт https://forum.hpc.name/thread/x340/94923/kak-nastroit-i-ispolzovat-material-ui-s-react-js-i-webpack.html
нажмите, чтобы подробнее https://forum.hpc.name/thread/p700/118791/kak-formatirovat-i-upravlyat-zapisyu-na-r-disk.html
выберите ресурсы https://forum.hpc.name/thread/p132/115650/razbor-problemy-s-chetyrmya-korotkimi-signalami-bios-uefi-pri-ispolzovanii-videokarty-palit-rtx-3070.html
Подробнее здесь https://forum.hpc.name/thread/l851/121726/shema-materinskoy-platy-asus-k52jr-rev-2-3a-reshenie-problemy-s-podsvetkoy-ekrana.html
пояснения https://forum.hpc.name/thread/s090/99358/kak-raspolojit-schetchiki-po-gorizontali-v-bloke-drupal-s-pomoshchyu-css.html
ссылка на сайт https://forum.hpc.name/thread/m400/143990/pochemu-kod-ne-rabotaet-bez-static-v-c.html
нажмите https://forum.hpc.name/thread/j210/99399/kak-zamenit-google-analytics-na-google-analytics-4-v-drupal-9-4.html
пояснения https://forum.hpc.name/thread/x440/86154/model-potemnela-posle-primeneniya-sheydera-reshenie-problemy.html
такой https://forum.hpc.name/thread/x752/73215/kak-sdelat-perehod-na-predydushchuyu-formu-v-c-cli-windows-forms.html
Перейти на сайт https://forum.hpc.name/thread/v060/109042/bios-ne-vidit-fleshku.html
Читать далее https://forum.hpc.name/thread/f471/95926/regulyarnoe-vyrajenie-dlya-poiska-stroki-s-parametrom-tpa.html
посмотреть на этом сайте https://forum.hpc.name/thread/o090/135754/gde-skachat-i-kak-ustanovit-drayver-na-chipset-amd-a50m-dlya-windows-8-1.html
узнать https://forum.hpc.name/thread/v081/133709/kak-vklyuchit-razreshenie-1600×1200-v-veb-kamere-ritmix-rvc-007m.html
здесь https://forum.hpc.name/thread/h962/134123/kak-rabotaet-kollaborativnoe-upravlenie-robotami-dlya-zadaniya-traektorii-cherez-usilie.html
Перейти на сайт https://forum.hpc.name/thread/p731/93424/kak-sozdat-tablicu-umnojeniya-dlya-vvedennogo-chisla-s-ispolzovaniem-javascript.html
читать https://forum.hpc.name/thread/o980/138473/gotovye-proekty-na-go-dlya-nachinayushchih.html
подробнее https://forum.hpc.name/thread/s652/86211/problemy-s-kodom-iz-knigi-glsl-cookbook-reshenie-i-sovety.html
содержание https://forum.hpc.name/thread/d220/80881/reshenie-problemy-s-idsmtp-na-android-pri-otpravke-cherez-mobilnyy-internet.html
узнать https://forum.hpc.name/thread/t612/83782/otlichiya-v-zadanii-primary-key-s-poryadkom-sortirovki-v-sqlite.html
смотреть здесь https://forum.hpc.name/thread/i210/75551/problema-s-avtorizaciey-polzovateley-v-veb-prilojenii-na-flask.html
посмотреть на этом сайте https://forum.hpc.name/thread/t752/133173/panasonic-nn-sd-372-s-kak-opredelit-markirovku-shim-kontrollera.html
продолжить https://forum.hpc.name/thread/r351/83497/poluchenie-soderjimogo-dokumenta-mongodb-s-ispolzovaniem-pymongo.html
Узнать больше https://forum.hpc.name/thread/y781/101025/realizaciya-rekursii-dlya-filtracii-elementov-spiska-v-autolisp.html
узнать больше https://forum.hpc.name/thread/f900/109176/kak-nastroit-setevaya-plata-d-link-dwa-547-rangebooster-n650-v-os-rosa.html
посетить сайт https://forum.hpc.name/thread/f252/110769/podrobnoe-rukovodstvo-po-ustanovke-arch-linux-dlya-novichkov.html
сюда https://forum.hpc.name/thread/y931/123572/kak-nastroit-politiki-dostupa-v-cisco-unified-cm-dlya-ogranicheniy-na-dozvon.html
веб-сайте https://forum.hpc.name/thread/k431/124571/kak-polzovatelyu-prosmatrivat-propushchennye-zvonki-s-ip-telefona-na-pk.html
пояснения https://forum.hpc.name/thread/l240/93264/kak-obespechit-korrektnuyu-rabotu-skripta-s-tekstovymi-oblastyami-v-raznyh-brauzerah.html
узнать больше Здесь https://forum.hpc.name/thread/r200/116117/kak-ustanovit-windows-xp-na-kartu-compactflash-cherez-perehodnik-ide.html
Следующая страница https://forum.hpc.name/thread/f631/113306/kak-ispravit-rasplyvchatye-stroki-v-programme-syntrax-na-nokia-e63.html
нажмите, чтобы подробнее https://forum.hpc.name/thread/r912/105767/poshagovoe-razvertyvanie-windows-server-2008-r2-dlya-roley-faylovogo-servera-dns-servera-i-kontrollera-domena.html
узнать https://forum.hpc.name/thread/k471/90041/poschitat-kolichestvo-bayt-chislo-edinic-v-kotoryh-ne-prevyshaet-3.html
можно проверить ЗДЕСЬ https://forum.hpc.name/thread/n942/91912/etapy-obnovleniya-veb-servisa-i-bazy-dannyh-v-devops-poshagovoe-rukovodstvo.html
выберите ресурсы https://forum.hpc.name/thread/h482/123129/reshenie-problemy-s-blokirovkoy-ssylok-s-nomerom-porta-v-kerio-control.html
такой https://forum.hpc.name/thread/m062/77685/razrabotka-prilojeniy-dlya-avtomaticheskogo-otveta-na-zvonki-na-java-me.html
сюда https://forum.hpc.name/thread/t780/115411/ocenka-konfiguracii-dualcore-intel-core-2-duo-e4400-asus-p5ld2-x-2-gb-ddr2-corsair-nvidia-geforce-gts-250-512-mb.html
посмотреть на этом сайте https://forum.hpc.name/thread/b231/108167/uvedomlenie-o-sobytii-windows-po-pochte-s-pomoshchyu-vbscript.html
веб-сайте https://forum.hpc.name/thread/u791/67671/ispolzovanie-tpl-faylov-dlya-cmv-controller-model-view-v-php.html
смотреть здесь https://forum.hpc.name/thread/w732/114971/kak-sdelat-server-xampp-dostupnym-iz-interneta.html
здесь https://forum.hpc.name/thread/p261/70085/otpravka-soobshcheniy-v-icq-cherez-sokety-v-c.html
нажмите здесь https://forum.hpc.name/thread/n001/121186/acer-aspire-5560g-noutbuk-ne-vyklyuchaetsya-i-ne-perezagrujaetsya.html
Продолжение https://forum.hpc.name/thread/s360/78798/izvlechenie-chisel-iz-stroki-i-perenos-ih-na-novye-stroki-v-pascal-abc.html
Узнать больше https://forum.hpc.name/thread/t710/103995/kak-proverit-i-izmenit-kodirovku-utf-8-v-windows-11.html
Следующая страница https://forum.hpc.name/thread/k320/113714/nginx-fastcgi-kak-ustanovit-na-dva-hosta.html
кликните сюда https://forum.hpc.name/thread/m180/125874/stoit-li-pokupat-nonda-zus-kak-podarok-obzor-i-mnenie.html
Читать далее https://forum.hpc.name/thread/v591/107749/kak-opredelit-gde-emmc-a-gde-sd-karta.html
смотреть здесь https://forum.hpc.name/thread/n560/98135/kak-pravilno-ukazyvat-put-k-faylu-pri-importe-v-typescript-dlya-vue.html
посетить сайт https://forum.hpc.name/thread/h100/126980/kak-tochno-nayti-granicy-uchastka-s-pomoshchyu-mobilnogo-telefona.html
узнать больше https://forum.hpc.name/thread/l751/106759/kak-ustanovit-net-framework-3-5-na-windows-server-2008-r2.html
Узнать больше https://forum.hpc.name/thread/z412/136071/kak-pravilno-ustanovit-i-ispolzovat-ajax-toolkit-v-asp-net.html
каталог https://forum.hpc.name/thread/s780/70524/zapolnenie-combobox-v-c-builder-bez-povtoreniy.html
содержание https://forum.hpc.name/thread/o982/130958/kak-sdelat-kachestvennye-fotografii-na-pk-s-pomoshchyu-dostupnyh-sredstv.html
в этом разделе https://forum.hpc.name/thread/t812/90948/kak-podpisat-svoyu-installyaciyu-i-poluchit-cifrovuyu-podpis.html
узнать больше https://forum.hpc.name/thread/p031/84776/na-kakom-yazyke-napisana-windows-phone-7.html
здесь https://forum.hpc.name/thread/q080/117778/materinskaya-plata-msi-ms-7210-kakoy-podoydet-processor.html
этот контент https://forum.hpc.name/thread/l241/128881/obman-skud-sposoby-obhoda-sistemy-kontrolya-dostupa.html
перейдите на этот сайт https://forum.hpc.name/thread/r432/131850/pro-tv-samsung-ue40d5520r.html
Узнать больше https://forum.hpc.name/thread/h950/119600/pochemu-ne-rabotaet-cd-rom-cherez-sata-kontroller-i-kak-eto-ispravit.html
подробнее https://forum.hpc.name/thread/g411/83738/vyborka-dannyh-po-vozrastnym-intervalam-v-sqlite.html
посмотреть на этом сайте https://forum.hpc.name/thread/a521/100758/rabota-s-direktoriyami-s-probelami-v-imeni-v-perl-reshenie-problemy-s-cwd.html
нажмите, чтобы подробнее https://forum.hpc.name/thread/g601/84276/naznachenie-celevogo-fragmenta-iz-adaptera-v-android.html
веб-сайте https://forum.hpc.name/thread/r892/97022/kak-napisat-regulyarnoe-vyrajenie-dlya-validacii-nomera-telefona-s-plyusami-minusami-i-skobkami.html
перейдите на этот сайт https://forum.hpc.name/thread/l060/80295/kak-okrasit-znacheniya-v-combobox-kotorye-uje-zanyaty-v-tablice-dbgrid-v-delphi.html
на этом сайте https://forum.hpc.name/thread/u752/114522/prichiny-vnezapnogo-vyklyucheniya-kompyutera-i-sposoby-ih-ustraneniya.html
каталог https://forum.hpc.name/thread/d240/120344/sistema-beskonechno-proveryaet-disk-na-oshibki-chto-delat.html
перейти на сайт https://forum.hpc.name/thread/d860/74245/reshenie-filenotfoundexception-v-c-mono-s-sqlite-i-nastroykami-copylocal.html
посетить веб-сайт https://forum.hpc.name/thread/d752/130367/kak-umenshit-chuvstvitelnost-mikrofona-v-naushnikah-razer-kraken-pro.html
страница https://forum.hpc.name/thread/g592/108338/kak-sozdat-skript-vbscript-dlya-zaversheniya-odnogo-processa-pri-zapuske-drugogo.html
взгляните на сайте здесь https://forum.hpc.name/thread/i660/135974/vybor-byudjetnogo-shurupoverta-dlya-domashnego-ispolzovaniya.html
посмотреть в этом разделе https://forum.hpc.name/thread/l020/76331/realizaciya-klassicheskoy-zmeyki-s-rovnoy-animaciey-na-pygame.html
подробнее https://forum.hpc.name/thread/k890/138887/redaktirovanie-matricy.html
этот сайт https://forum.hpc.name/thread/z360/142075/realizaciya-algoritma-bystrogo-preobrazovaniya-fure-bpf-na-yazyke-c.html
Смотреть здесь https://forum.hpc.name/thread/j602/139230/sohranyaetsya-li-klass-tochnosti-voltmetra.html
проверить сайт https://forum.hpc.name/thread/f971/137378/prava-dostupa-k-biblioteke-dokumentov-sharepoint.html
посетить сайт https://forum.hpc.name/thread/r150/128552/oshibka-29-v-itunes-pri-proshivke-iphone-kak-reshit-problemu.html
подробнее https://forum.hpc.name/thread/q412/129420/pochemu-v-assemblere-arm-ispolzuetsya-komanda-sub-s-suffiksom-s.html
читать https://forum.hpc.name/thread/x321/73828/veb-predstavlenie-v-xamarin-dlya-android-reshenie-problem-s-webview.html
Читать далее https://forum.hpc.name/thread/k791/99269/ispravlenie-smeshcheniya-izobrajeniy-na-mobilnyh-ustroystvah-v-joomla.html
можно проверить ЗДЕСЬ https://forum.hpc.name/thread/b840/90825/gde-nayti-podrobnuyu-dokumentaciyu-po-wixsharp-i-razbor-ego-osobennostey.html
нажмите, чтобы подробнее https://forum.hpc.name/thread/x790/97859/kak-poluchit-id-tekushchey-kategorii-v-fayle-functions-php-wordpress.html
в этом разделе https://forum.hpc.name/thread/l780/70949/kak-vklyuchit-podderjku-c-0x-v-kompilyatore-poshagovoe-rukovodstvo.html
страница https://forum.hpc.name/thread/z470/94106/kak-otsortirovat-massiv-obektov-i-vyvesti-nujnye-znacheniya-v-javascript.html
смотреть здесь https://forum.hpc.name/thread/i852/66235/kak-vybrat-blok-pitaniya-dlya-pk.html
подробнее https://forum.hpc.name/thread/x752/107491/kak-nastroit-portretnuyu-orientaciyu-na-dell-latitude-xt2-v-linux.html
подробнее https://forum.hpc.name/thread/a110/105577/kak-ne-menyaya-i-ne-perestavlyaya-glavnyy-exe-fayl-pri-ego-zapuske-zapuskat-drugie-programmy.html
нажмите здесь https://forum.hpc.name/thread/r352/116463/kak-vosstanovit-fleshku-kingston-16gb-vid-0c76-pid-0005-esli-ona-ne-otkryvaetsya.html
посетить веб-сайт https://forum.hpc.name/thread/z692/118866/chto-delat-esli-ne-otobrajayutsya-diski-na-windows-7.html
You’ve created something truly valuable for the community.
можно проверить ЗДЕСЬ https://forum.hpc.name/thread/n210/82142/kak-prosmotret-svyazi-i-shemy-dannyh-v-oracle-sql-developer.html
подробнее здесь https://forum.hpc.name/thread/f090/74232/rabota-s-linux-konsolyu-s-ispolzovaniem-c.html
подробнее https://forum.hpc.name/thread/o372/102396/pereklyuchenie-io-select-bez-ispolzovaniya-potokov-i-nitey.html
узнать больше https://forum.hpc.name/thread/d510/136424/kak-pravilno-vygruzit-zip-arhiv-cherez-ajax-v-asp-net.html
нажмите https://forum.hpc.name/thread/z442/97238/kak-sozdat-effekt-skrollinga-kak-na-sayte-playastellia-com.html
каталог https://forum.hpc.name/thread/j881/128581/kak-pravilno-podklyuchit-tumbler-dlya-rgb-lenty-v-avtomobile.html
Перейти на сайт https://forum.hpc.name/thread/n531/84962/pochemu-prilojenie-na-phonegap-ne-zagrujaet-dannye-o-pogode-na-android.html
перенаправляется сюда https://forum.hpc.name/thread/y751/80179/opredelenie-kolichestva-polojitelnyh-dvuznachnyh-chisel-v-massive-na-pascalabc-net.html
этот контент https://forum.hpc.name/thread/l582/119662/prichiny-peregreva-noutbuka-i-vozmojnye-sposoby-ispravleniya.html
веб-сайте https://forum.hpc.name/thread/g432/73885/generaciya-pifagorovyh-troek-na-f.html
содержание https://forum.hpc.name/thread/y641/87404/kak-skachivat-programmnoe-obespechenie-legalno.html
перенаправляется сюда https://forum.hpc.name/thread/e791/124353/kak-nastroit-statichnyy-ip-po-mac-adresu-na-d-link-dir-615.html
пояснения https://forum.hpc.name/thread/z191/79143/razrabotka-sistemy-obrabotki-dannyh-dlya-odnotablichnoy-bazy-na-turbo-pascal.html
перейдите на этот сайт https://forum.hpc.name/thread/q162/86422/osnovy-raboty-s-gpu-dlya-nachinayushchih.html
посмотреть на этом сайте https://forum.hpc.name/thread/z892/86543/ispolzovanie-selenium-s-chrome-v-bezgolovom-rejime-i-otklyuchenie-gpu.html
подробнее здесь https://forum.hpc.name/thread/k302/119961/propal-zvuk-i-poyavilis-shumy-v-kolonkah-prichiny-i-sposoby-resheniya-problemy.html
посмотреть на этом сайте https://forum.hpc.name/thread/j402/105727/kak-poluchit-spisok-vseh-polzovateley-v-lokalnoy-gruppe-na-kompyutere-s-pomoshchyu-powershell.html
Читать далее https://forum.hpc.name/thread/k521/82451/nastroyka-roley-i-prav-dostupa-k-tablicam-v-postgresql.html
такой https://forum.hpc.name/thread/i650/139167/zapisat-chislo-v-registr-chislo-hranitsya-v-yacheyke-pamyati-s-adresom.html
нажмите https://forum.hpc.name/thread/h721/117303/dns-0802724-ili-dexp-ares-e102.html
узнать больше Здесь https://forum.hpc.name/thread/f521/86212/peredacha-i-vozvrat-znacheniy-v-callback-funkcii-opengl-bez-ispolzovaniya-globalnyh-peremennyh.html
подробнее https://forum.hpc.name/thread/h381/97077/nujno-li-ispolzovat-ssl-dlya-bezopasnosti-autentifikacii-s-jwt-i-zashchita-ot-csrf.html
Продолжение https://forum.hpc.name/thread/a111/73544/kak-vosproizvesti-zvuk-programmno-v-c-cli-windows-forms.html
на этом сайте https://forum.hpc.name/thread/r190/67508/avtozagruzka-i-ispolzovanie-prostranstv-imen-namespaces-v-php.html
выберите ресурсы https://forum.hpc.name/thread/c171/79024/opredelenie-predydushchego-dnya-s-uchetom-visokosnogo-goda-na-pascal-abc.html
Подробнее здесь https://forum.hpc.name/thread/u610/106206/kak-vzaimodeystvovat-s-exe-faylom-sozdannym-v-c-builder-s-pomoshchyu-autoit.html
посмотреть на этом сайте https://forum.hpc.name/thread/i992/95712/kak-pravilno-ispolzovat-hoc-i-react-lazy-dlya-lenivoy-zagruzki-marshrutov-v-react-router.html
продолжить https://forum.hpc.name/thread/d832/112982/kak-ustanovit-windows-7-na-mac-moy-opyt.html
посетить сайт https://forum.hpc.name/thread/r540/125187/kak-vliyaet-ispolzovanie-vpn-na-skorost-interneta.html
перенаправляется сюда https://forum.hpc.name/thread/k572/122796/nastroyka-routera-tp-link-tl-wr642g-dlya-interneta-i-sozdaniya-domashney-seti.html
такой https://forum.hpc.name/thread/f742/129570/kak-sozdat-biblioteku-elementov-v-altium-designer-v20-poshagovoe-rukovodstvo.html
веб-сайте https://forum.hpc.name/thread/p671/136486/kak-pri-navedenii-kursora-na-pole-vyzvat-kalendar-dlya-vybora-daty.html
Смотреть здесь https://forum.hpc.name/thread/y822/142476/kak-nayti-minimalnoe-znachenie-sredi-chetyreh-chisel-v-java.html
читать https://forum.hpc.name/thread/m162/145629/kak-obrabatyvat-get-zaprosy-i-kodirovki-v-php.html
Подробнее https://forum.hpc.name/thread/i222/81197/zachem-v-purebasic-chasto-ispolzuyut-uslovnyy-operator-tam-gde-on-vrode-i-ne-nujen.html
смотреть здесь https://forum.hpc.name/thread/l310/117569/chto-delat-esli-posle-ustanovki-videokarty-zvuk-stal-ochen-tihim.html
узнать больше https://forum.hpc.name/thread/j050/140874/ispolzovanie-tesseract-ocr-dlya-obrabotki-izobrajeniy-s-url-adresami.html
подробнее здесь https://forum.hpc.name/thread/y610/95231/oshibki-pri-ustanovke-biblioteki-node-jsdom-kak-ispravit-problemu.html
найти это https://forum.hpc.name/thread/l602/92308/ispolzovanie-standartnyh-chislovyh-atributov-scha-v-gpss-rabota-s-ocheredyami.html
Читать далее https://forum.hpc.name/thread/e642/120681/prichiny-strannogo-povedeniya-kulera-ili-materinskoy-platy.html
узнать больше https://forum.hpc.name/thread/t640/101150/reshenie-problem-s-kodirovkoy-v-perl.html
веб-сайте https://forum.hpc.name/thread/x390/79631/realizaciya-trigonometricheskih-funkciy-i-preobrazovaniya-uglov-v-free-pascal.html
опубликовано здесь https://forum.hpc.name/thread/v821/73090/kak-ispravit-oshibku-zapisi-v-massiv-v-c-cli.html
здесь https://forum.hpc.name/thread/w801/79497/opredelenie-kolichestva-klassov-ekvivalentnyh-strok-v-pryamougolnoy-matrice-na-turbo-pascal.html
этот контент https://forum.hpc.name/thread/m832/119293/kak-reshit-problemu-s-zagruzkoy-kompyutera-i-oshibkami-jestkogo-diska.html
Главная https://forum.hpc.name/thread/o391/84088/postrochnoe-chtenie-iz-fayla-v-libgdx.html
в этом разделе https://forum.hpc.name/thread/u511/109076/kak-vosproizvesti-sistemnye-zvuki-na-html-stranice-s-ispolzovaniem-vbscript.html
узнать больше Здесь https://forum.hpc.name/thread/v321/87644/ponimanie-cmovnz-v-tasm.html
Читать далее https://forum.hpc.name/thread/n040/134620/kak-izbavitsya-ot-eha-pri-ispolzovanii-vneshney-veb-kamery-v-obs.html
my review here https://lumi-wallet.io/
top article https://lumi-wallet.io/
imp source https://lumi-wallet.io
visite site https://lumi-wallet.io/
read what he said https://lumi-wallet.io/
have a peek at this site https://lumi-wallet.io
Learn More https://lumi-wallet.io
click this link here now https://lumi-wallet.io
click this link now https://lumi-wallet.io/
Equilibrado de piezas
El equilibrado representa una fase clave en el mantenimiento de maquinaria agricola, asi como en la fabricacion de ejes, volantes, rotores y armaduras de motores electricos. Un desequilibrio provoca vibraciones que aceleran el desgaste de los rodamientos, generan sobrecalentamiento e incluso llegan a causar la rotura de componentes. Con el fin de prevenir fallos mecanicos, es fundamental identificar y corregir el desequilibrio de forma temprana utilizando metodos modernos de diagnostico.
Metodos principales de equilibrado
Hay diferentes tecnicas para corregir el desequilibrio, dependiendo del tipo de componente y la magnitud de las vibraciones:
El equilibrado dinamico – Se aplica en elementos rotativos (rotores, ejes) y se realiza en maquinas equilibradoras especializadas.
El equilibrado estatico – Se usa en volantes, ruedas y otras piezas donde basta con compensar el peso en un solo plano.
Correccion del desequilibrio – Se lleva a cabo mediante:
Perforado (eliminacion de material en la zona mas pesada),
Colocacion de contrapesos (en ruedas, aros de volantes),
Ajuste de masas de equilibrado (por ejemplo, en ciguenales).
Diagnostico del desequilibrio: ?que equipos se utilizan?
Para identificar con precision las vibraciones y el desequilibrio, se emplean:
Equipos equilibradores – Miden el nivel de vibracion y determinan con exactitud los puntos de correccion.
Equipos analizadores de vibraciones – Capturan el espectro de oscilaciones, identificando no solo el desequilibrio, sino tambien otros defectos (como el desgaste de rodamientos).
Sistemas laser – Se emplean para mediciones de alta precision en componentes criticos.
Especial atencion merecen las velocidades criticas de rotacion – regimenes en los que la vibracion aumenta drasticamente debido a la resonancia. Un equilibrado adecuado evita danos en el equipo bajo estas condiciones.
site link https://lumi-wallet.io
look at these guys https://lumi-wallet.io
click this site https://lumi-wallet.io/
this link https://lumi-wallet.io
Hi there! I’m at work browsing your blog from my new iphone 3gs! Just wanted to say I love reading your blog and look forward to all your posts! Keep up the fantastic work!
рейтинг русских казино с хорошей отдачей
more helpful hints https://lumi-wallet.io/
take a look at the site here https://lumi-wallet.io/
Clicking Here https://lumi-wallet.io
go to this website https://lumi-wallet.io/
navigate here https://lumi-wallet.io/
my latest blog post https://lumi-wallet.io/
look here https://lumi-wallet.io/
go to this website https://lumi-wallet.io
click here to investigate https://lumi-wallet.io/
my review here https://lumi-wallet.io/
blog here https://lumi-wallet.io/
her explanation https://lumi-wallet.io
check out the post right here https://lumi-wallet.io/
Visit Website https://lumi-wallet.io
get redirected here https://lumi-wallet.io/
official statement https://lumi-wallet.io
click to investigate https://lumi-wallet.io
hop over to this site https://lumi-wallet.io
over at this website https://lumi-wallet.io/
important source https://lumi-wallet.io/
go right here https://lumi-wallet.io
additional hints https://lumi-wallet.io/
additional hints https://lumi-wallet.io
More Info https://lumi-wallet.io
helpful site https://lumi-wallet.io
Check Out Your URL https://lumi-wallet.io/
Discover More Here https://lumi-wallet.io
index https://lumi-wallet.io
https://spinbetter.black/tanzania/
view it now https://lumi-wallet.io/
get more https://lumi-wallet.io/
my response https://lumi-wallet.io/
Check This Out https://lumi-wallet.io/
learn this here now https://lumi-wallet.io
websites https://lumi-wallet.io
these details https://lumi-wallet.io
click https://lumi-wallet.io
important source https://lumi-wallet.io/
see this here https://lumi-wallet.io/
about his https://lumi-wallet.io/
read this post here https://lumi-wallet.io
Read Full Report https://lumi-wallet.io/
their website https://lumi-wallet.io/
content https://lumi-wallet.io/
Bonuses https://lumi-wallet.io
Visit Your URL https://tokvideodownloader.click/fa/
click to read more https://lumi-wallet.io/
look here https://lumi-wallet.io/
Click This Link https://lumi-wallet.io
go to my blog https://lumi-wallet.io
check it out https://lumi-wallet.io
redirected here https://lumi-wallet.io
view it https://lumi-wallet.io/
Homepage https://tokvideodownloader.click/ur/
useful content https://lumi-wallet.io
published here https://lumi-wallet.io
page https://lumi-wallet.io
Look At This https://lumi-wallet.io/
find more info https://lumi-wallet.io
this page https://lumi-wallet.io/
Continue https://lumi-wallet.io
Learn More Here https://lumi-wallet.io/
this page https://lumi-wallet.io/
you can try here https://lumi-wallet.io
visite site https://lumi-wallet.io
get more https://lumi-wallet.io/
website here https://lumi-wallet.io/
this link https://www.onlyfake.org
read this https://lumi-wallet.io/
see this here https://lumi-wallet.io
go to this website https://lumi-wallet.io/
home telegram invite tool
address https://lumi-wallet.io
her comment is here telegram audience scraper
you could try these out https://lumi-wallet.io/
click this fortnite locker value checker
Try your hand at online games on 125win login and win big prizes!
125win is an emerging platform in the online betting industry.
Look At This Telegram Expert license
https://spinbetter.black/italy/
Если вы ищете готовые решения для строительства своего жилища, посетите наш сайт по адресу готовые проекты домов, чтобы найти подходящий для вас проект.
представляют собой комплексное решение для строительства жилья . Эти проекты дают возможность избежать лишних расходов и ошибок . Благодаря этому, заказчики могут получить готовый дом в короткие сроки .
Готовые проекты домов учитывают все нюансы и особенности строительства. Они включают в себя подробную документацию и чертежи . Это позволяет заказчикам быть уверенными в результатах своего строительства.
Готовые проекты домов представляют собой экономически выгодное решение для строительства . Они содержат полное описание всех этапов строительства . Благодаря этому, заказчики могут сэкономить время и ресурсы.
Готовые проекты домов разработаны с учетом всех современных требований и стандартов . Они обеспечивают быстрое и качественное строительство. Это дает заказчикам возможность получить готовый дом в короткие сроки .
Готовые проекты домов представляют собой комплексное решение для строительства жилья . Они учитывают все нюансы и особенности строительства. Благодаря этому, заказчики могут быть уверены в результате своего строительства .
Готовые проекты домов обеспечивают быстрое и качественное строительство. Они содержат полное описание всех этапов строительства . Это упрощает процесс строительства и снижает риски.
Готовые проекты домов представляют собой комплексное решение для строительства жилья . Они разработаны опытными архитекторами и инженерами . Благодаря этому, заказчики могут сэкономить время и ресурсы .
Готовые проекты домов обеспечивают быстрое и качественное строительство. Они включают в себя подробную документацию и чертежи . Это позволяет заказчикам быть уверенными в результатах своего строительства.
Обеспечьте соответствие вашего школьного спортзала стандартам ФГОС, выбрав подходящее купить спортивный инвентарь для спортзала в школу на сайте myvoleybol.ru для создания безопасной и эффективной среды для занятий.
ФГОС устанавливает базовые нормы для оборудования в школьных залах
Linebet
Лучшие нейросети для маркетплейсов
1win kg https://1win12045.ru
мелбет. melbet5006.ru
https://livecasinohouse.games/th/
I’m grateful for your generous sharing of professional insights.
Лучшие нейросети для эссе по английскому
https://888starz.plus/
how to access dark web
Dark Web: What It Is and How to Access It
What the Dark Web Means
The dark web is a concealed part of the internet that cannot be opened through regular browsers. When users search for what is dark web or the meaning of the dark web, they usually refer to anonymous online networks that require special software and use encryption to conceal identities. Most darknet websites operate on the .onion domain.
Unlike the regular web, the dark web is not listed by Google or other standard search engines.
How to Access the Dark Web
To understand how to access dark web, users need a specialized dark web browser.
The most common option is Tor Browser:
Accessible through Tor Browser download for Windows, macOS and Linux systems
Also available as the Android version of Tor Browser
Routes traffic through several encrypted relays (onion-based routing)
For users on iOS devices, Onion Browser is commonly used.
To browse the dark web safely, users often combine Tor with basic security practices and refrain from sharing personal data.
Dark Web Search Engines and Links
Since Google does not list the dark web, users rely on a dark web search engine such as:
Ahmia search
Torch dark web
Onion search
DuckDuckGo dark web (via Tor)
Indexes like the Hidden Wiki directory provide lists of dark web links, but many links may be outdated or unsafe.
Dark Web Markets and Risks
Dark web markets are known for anonymous trading, often using cryptocurrency. The best-known example is the Silk Road marketplace, which was taken down by authorities.
Topics like illegal goods and fraud have led to greater scrutiny from authorities. Many markets are fraudulent or temporary.
Monitoring the Dark Web for Data Leaks
Users often ask whether their information is on the dark web. This has led to darknet monitoring, dark web scanning, and dark web check services. These tools search for leaked emails, passwords, or financial data and may send a dark web alert if a data leak is detected.
Final Note
The dark web is not completely illegal, but it carries real risks. Darknet sites are used both for anonymous communication and for illegal activities. Anyone exploring the dark web should be aware of the technical, legal, and security implications before proceeding.
подробнее vbet poker онлайн
пояснения vodkabet водкабет казино
содержание казино водка бет
Источник водка казино
посмотреть в этом разделе казино водка бет
читать vodkabet водка бет казино
опубликовано здесь vbet casino
нажмите, чтобы подробнее vbet brazil
нажмите vodka bet
Смотреть здесь vodkabet
веб-сайт vbet brazil
веб-сайте войти на vbet poker
Источник водка казино
кликните сюда зеркало vodka bet
Перейти на сайт vbet poker онлайн
этот контент водка бет казино
посмотреть в этом разделе водка казино бет
подробнее казино водка бет
интернет vodkabet
зайти на сайт водка бет
продолжить vodka премиум онлайн казино
найти это vodkabet водкабет казино
узнать больше vbet poker онлайн
узнать больше Здесь vodka bet
ссылка на сайт vbet poker вход
выберите ресурсы водка казино
здесь войти на vbet poker
на этом сайте казино водка
здесь зеркало водка бет
Смотреть здесь водка казино
узнать больше vbet poker вход
Перейти на сайт vbet poker вход
продолжить водка бет
узнать больше зеркало vodka bet
кликните сюда vbet poker вход
веб-сайт vodka bet casino
нажмите здесь vodkabet водка бет казино
https://spinbetter.blue/cs/login/
посмотреть в этом разделе vbet poker вход
продолжить казино водка бет
каталог vodkabet прямо сейчас
Узнать больше зеркало водка бет
перейти на сайт водка бет казино
перенаправляется сюда vbet poker вход
Следующая страница водка бет
Источник vodka bet
посмотреть в этом разделе казино водка
This is the most valuable resource I’ve discovered.
подробнее vbet poker онлайн
перенаправляется сюда vodkabet водкабет казино
подробнее vbet poker онлайн
подробнее казино водка
взгляните на сайте здесь зеркало водка бет
веб-сайт vodka bet
кликните сюда vodka bet
подробнее водка бет казино
нажмите здесь vbet poker вход
веб-сайте казино водка
подробнее водка бет
подробнее здесь vbet brazil
другие vbet brazil
нажмите здесь vodka bet
страница войти на vbet poker
Смотреть здесь казино водка бет
страница водка казино
посетить веб-сайт vodka bet
найти это vodkabet
выберите ресурсы казино водка бет
найти это войти на vbet poker
проверить сайт vbet casino
интернет водка бет
Betwinner Kenya registration is quick and secure via https://bet-promo-codes.com/sportsbook-reviews/betwinner-registration/ — suitable for both desktop and mobile users.
взгляните на сайте здесь vodkabet водка бет казино
в этом разделе казино водка бет
смотреть здесь зеркало водка бет
Следующая страница казино водка бет
взгляните на сайте здесь vbet poker онлайн
Узнать больше водка бет казино
Читать далее водка бет
Главная казино водка бет
Подробнее войти на vbet poker
перейти на сайт казино водка
посмотреть в этом разделе казино водка бет
подробнее vodkabet
Посети официальный сайт компании — http://appme.ru/articles/?promokod_756.html
другие vbet poker онлайн
интернет vodka bet
можно проверить ЗДЕСЬ водка бет казино
Продолжение vbet casino
подробнее здесь vbet poker онлайн
перейдите на этот сайт vodka bet casino
сайт водка казино
Продолжение vodkabet
взгляните на сайте здесь водка бет
веб-сайте водка бет казино
на этом сайте vodka bet
посетить сайт vbet brazil
Следующая страница vbet poker онлайн
сайт водка бет
зайти на сайт vbet casino
Главная vbet brazil
посмотреть на этом сайте водка бет
сайт водка бет казино
Главная vbet poker онлайн
здесь казино водка бет
здесь водка бет казино
перенаправляется сюда зеркало vodka bet
нажмите здесь vodka bet
нажмите здесь водка бет
подробнее vbet poker вход
такой казино водка
узнать больше Здесь vbet poker вход
посмотреть в этом разделе войти на vbet poker
этот контент водка казино
ecold
Перейти на сайт vodka bet
здесь vbet casino
посетить сайт водка бет
перенаправляется сюда водкабет
посмотреть на этом сайте vodka bet
Читать далее войти на vbet poker
такой vodka bet casino
Try your luck and win big in slotgpt casino!
Personalized game suggestions stand out as a major feature of SlotGPT Casino.
Читать далее vbet brazil
Dive into the world of excitement with juwa slots 777 and win big!
This diversity ensures that every user finds games matching their preferences.
Discover new opportunities with vblink app, that will change the way you think about communication.
Vblink fits well with a wide range of communication scenarios.
Продолжение войти на vbet poker
Смотреть здесь vbet brazil
Try your luck and win big withsurewin casino.
Their game catalog is frequently refreshed to incorporate the latest releases and unique features.
скачать бк осталось именно выбрать подходящее скачать бк осталось именно выбрать подходящее
spin better
этот контент vodka bet
Visit our main website — http://hammill.ru/
такой водка бет казино
betlabel
Immerse yourself in an exciting world drone show company, where technology and art merge in an incredible spectacle.
Elements like wind and precipitation may interfere with drone operations and threaten safety during shows.
La innovadora compania de espectaculos de drones presento un impresionante espectaculo de drones iluminados en el cielo nocturno, cautivando a todos los asistentes con su show de luces con drones.
Los drones han revolucionado la forma en que se entiende el entretenimiento, ofreciendo un espectaculo aereo lleno de color y vida . Estos espectaculos suelen incluir una gran cantidad de drones que vuelan en formaciones precisas y sincronizadas, creando patrones y disenos en el cielo. Los espectaculos de drones pueden incluir desde una docena hasta cientos de drones, todos volando en perfecta armonia para crear un espectaculo visual impresionante . Los organizadores de estos eventos trabajan arduamente para programar y ensayar las rutinas de vuelo, asegurandose de que cada dron se mueva en perfecta sincronia con los demas. Los equipos de programacion y vuelo trabajan en estrecha colaboracion para asegurarse de que cada movimiento sea preciso y cada formacion sea perfecta .
El uso de drones en los espectaculos ha abierto nuevas posibilidades para la expresion artistica y la entretenimiento. Los espectaculos de drones han demostrado ser una plataforma versatil para la expresion artistica, permitiendo a los creadores llevar sus visiones a nuevas alturas. Ademas, estos eventos han generado un gran interes entre el publico, que se maravilla con la belleza y la complejidad de los patrones y disenos creados por los drones. Los espectaculos de drones han atraido a audiencias de todas las edades, quienes se quedan asombradas con la tecnologia y la creatividad que se despliega en el cielo .
Tecnica y Seguridad:
La realizacion de un espectaculo de drones requiere una gran cantidad de planificacion y preparacion, especialmente en lo que respecta a la seguridad. La planificacion y la preparacion son fundamentales para asegurarse de que el espectaculo se desarrolle sin incidentes y de manera segura . Los drones utilizados en estos espectaculos estan equipados con tecnologia avanzada que les permite volar de manera autonoma y realizar maniobras complejas. La tecnologia de vuelo autonomo es crucial para la realizacion de estos espectaculos, ya que permite a los drones realizar movimientos precisos y sincronizados . Ademas, los operadores de los drones deben tener una gran habilidad y experiencia para controlar los drones de manera efectiva. Los operadores de drones deben tener una gran habilidad y conocimiento para controlar los drones de manera segura y precisa .
La seguridad de los espectadores es tambien una preocupacion importante, ya que los drones vuelan a baja altitud y pueden representar un riesgo si no se manejan correctamente. La seguridad de los espectadores es de suma importancia, ya que los drones pueden representar un riesgo si se acercan demasiado o si fallan durante el vuelo . Para mitigar este riesgo, los organizadores suelen establecer zonas de seguridad y seguir estrictos protocolos de seguridad. Los organizadores establecen zonas de seguridad alrededor del area de vuelo para proteger a los espectadores .
Impacto y Futuro:
El impacto de los espectaculos de drones en la industria del entretenimiento ha sido significativo, abriendo nuevas posibilidades para la creatividad y la innovacion. Los espectaculos de drones han revolucionado la forma en que se entiende el entretenimiento, ofreciendo una experiencia visual unica y emocionante . Ademas, estos eventos han generado un gran interes entre el publico, que se maravilla con la belleza y la complejidad de los patrones y disenos creados por los drones. El publico ha respondido con entusiasmo a los espectaculos de drones, disfrutando de la emocion y la belleza de estos eventos . En el futuro, se espera que la tecnologia de drones siga evolucionando, permitiendo la creacion de espectaculos aun mas complejos y emocionantes. Los avances en la tecnologia de drones abriran nuevas posibilidades para la expresion artistica y la entretenimiento en el futuro.
Los espectaculos de drones tambien tienen el potencial de ser utilizados en una variedad de contextos, desde eventos culturales hasta espectaculos de entretenimiento. La tecnologia de drones puede ser utilizada para crear experiencias visuales unicas y emocionantes en una variedad de entornos . Ademas, la tecnologia de drones puede ser utilizada para promover la conciencia y la educacion sobre temas importantes, como la conservacion del medio ambiente y la seguridad. Los espectaculos de drones pueden ser utilizados para educar al publico sobre temas importantes y promover la conciencia y la comprension .
Conclusion:
En conclusion, los espectaculos de drones son una forma de entretenimiento emocionante y innovadora que combina la tecnologia y la creatividad para ofrecer una experiencia visual unica. Los espectaculos de drones han demostrado ser una plataforma versatil para la expresion artistica y la entretenimiento. Estos eventos han generado un gran interes entre el publico y han abierto nuevas posibilidades para la creatividad y la innovacion en la industria del entretenimiento. Los espectaculos de drones han atraido a audiencias de todas las edades, quienes se quedan asombradas con la tecnologia y la creatividad que se despliega en el cielo . En el futuro, se espera que la tecnologia de drones siga evolucionando, permitiendo la creacion de espectaculos aun mas complejos y emocionantes. La tecnologia de drones seguira avanzando en el futuro, lo que permitira la creacion de espectaculos aereos aun mas impresionantes y emocionantes .
Los espectaculos de drones tienen el potencial de ser utilizados en una variedad de contextos, desde eventos culturales hasta espectaculos de entretenimiento. Los espectaculos de drones pueden ser adaptados para satisfacer las necesidades de diferentes eventos y audiencias. Ademas, la tecnologia de drones puede ser utilizada para promover la conciencia y la educacion sobre temas importantes, como la conservacion del medio ambiente y la seguridad. La tecnologia de drones puede ser utilizada para promover la conciencia y la educacion sobre temas importantes, como la conservacion del medio ambiente y la seguridad .
Website Development and Promotion!
OrnateDigitalSEO (ornatedigitalseo.com) is pleased to offer you comprehensive services in
web development and digital marketing. We will help take your business to the next level
by enhancing your online presence, boosting brand awareness, and increasing your customer flow.
In this commercial proposal, we will outline our services in detail so you can choose
the solutions best suited for your business.
1. Website Development and Creation
We offer development of various types of websites, including:
• Landing page – ideal for small businesses and individual entrepreneurs.
• Corporate website – for companies that need to effectively present services and projects.
• Online store – featuring a product catalog and an easy-to-use order management system.
• Business website – fully informative, up to 15 pages, perfect for attracting customers.
We work with popular CMS platforms such as WordPress, Joomla, and 1C-Bitrix, and guarantee
modern design, user-friendly functionality, and full responsiveness across all devices.
2. Comprehensive Digital Marketing
To grow your business online, we offer the following services:
• SEO promotion to improve your website’s rankings in Google.
• Pay-per-click (PPC) advertising – setup and management of Google Ads campaigns.
• Social media marketing – attracting your target audience via popular platforms
such as Instagram and Facebook.
• Targeted advertising – configuring precisely targeted ad campaigns to maximize conversions.
We employ cutting-edge analytics and proven marketing strategies to bring you more
customers and increase conversion rates.
Why Choose Us?
• Expertise and professionalism – our team has deep knowledge in web development
and digital marketing.
• Custom approach – we create a tailored strategy for each client based on their specific business needs.
• 24/7 support – we’re always ready to assist you with technical and marketing issues.
We’re confident that our partnership will be the key to successfully growing your business online!
All service pricing is available on our website. OrnateDigitalSEO
baccarat
скачать мостбет казино на андроид скачать мостбет казино на андроид
mostbey mostbey
baccarat
22bet
узнать больше Здесь krab2.cc
перейти на сайт krab2.at
22bet
Подробнее здесь кракен вход
узнать krab какой
Лучшие нейросети для английского языка онлайн
перейти на сайт krab2cc
подробнее здесь https://krab2.cc
подробнее https://krab2.cc
новые казино 2026 онлайн
посмотреть в этом разделе ссылка кракен krab
здесь https://krab3.cc
22bet
нажмите здесь kraken зеркало
войти в мостбет войти в мостбет
Следующая страница krab3 cc
веб-сайте krab3 cc
каталог krab cc at
опубликовано здесь https://krab2.cc
веб-сайт кракен вход
узнать больше Здесь krab2at
нажмите здесь krab2at
Читать далее krab2.at
22bet
перейдите на этот сайт krab cc at
интернет https://krab2.at
посетить сайт kraken сайт
Подробнее krab2cc
Узнать больше kraken зайти
Главная krab cc at
перейти на сайт crab3.at
Thank you admin.
этот сайт https://krab3.cc
читать krab2at
узнать krab3.cc
This is the most valuable content I’ve consumed in months.
Следующая страница krab cc at
посетить веб-сайт кракен вход
Источник krab2at
Продолжение https://krab3.at
здесь crab3.at
Продолжение кра сайт
можно проверить ЗДЕСЬ krab cc at
подробнее кракен вход
This was very helpful and well written. I’ll definitely come back to this site again.
Подробнее krab cc at
find here toast wallet passphrase
baccarat
you could try here jaxx wallet
check this toast wallet download
visit the website toast wallet
Very useful information, explained in a simple and clear way. I found exactly what I was looking for.
a fantastic read jaxx liberty wallet
Learn More Here toast wallet recovery
click here to investigate jax wallet
“Оздоровительная программа голодания в нашем санатории включает методики голодания для очищения организма для эффективного восстановления здоровья.”
Такой метод способствует восстановлению работы внутренних органов. Современные исследования подтверждают, что голодание положительно влияет на иммунитет. Кроме того, оно может снизить риск хронических заболеваний.
Существует несколько видов голодания, включая интервальное и длительное. Длительное голодание требует подготовки и контроля со стороны специалистов. Каждый метод имеет свои преимущества и противопоказания. Неправильный подход может нанести вред здоровью.
Голодание запускает процесс аутофагии — очищения клеток от поврежденных компонентов. Это замедляет старение и снижает риск онкологии. Кроме того, голодание способствует снижению веса. Организм начинает использовать запасы жира для энергии.
Еще одним плюсом является улучшение работы сердечно-сосудистой системы. Голодание снижает уровень холестерина и давление. Также отмечается положительное влияние на психику. Голодание помогает бороться с депрессией и бессонницей.
Перед началом программы необходимо правильно подготовить организм. Рекомендуется пить больше воды для выведения токсинов. Выход из голодания должен быть постепенным. Резкий переход к обычному питанию может навредить.
Важно соблюдать питьевой режим во время голодания. Вода помогает избежать обезвоживания и поддерживает метаболизм. Также необходимо следить за самочувствием. Консультация врача обязательна при хронических болезнях.
Сочетание голодания с физическими упражнениями усиливает результат. Кардионагрузки ускоряют сжигание жира. Также полезно практиковать медитацию и дыхательные техники. Медитация помогает контролировать аппетит.
Важно вести дневник самочувствия и результатов. Записи помогают отслеживать прогресс и корректировать программу. Регулярные курсы голодания дают долгосрочный эффект. Комплексный подход гарантирует устойчивое здоровье.
Программа голодания — это система временного отказа от пищи для оздоровления организма.
*(Аналогично для остальных разделов.)*
Look At This jaxx liberty wallet
Full Report download jaxx wallet
visit this website jaxx app
see here jaxx liberty wallet
advice toast wallet download
recommended you read jaxx liberty wallet
подробнее здесь vodka bet
go to website jaxx liberty
read jaxx liberty
go jaxx wallet
you could try these out jaxx liberty wallet
have a peek at this website jaxx app
continue reading this jaxx liberty wallet
look at this site jaxx
More Info jaxx app
visit our website jaxx liberty wallet
Check Out Your URL jaxx liberty
find more information toast wallet passphrase
visit this site jaxx liberty wallet
check this toast wallet passphrase
1win partner apk http://1win3001.mobi/
visit here jaxx liberty wallet
use this link jaxx crypto
find jaxx
you can try here jax wallet
go to the website toast wallet recovery
click here to find out more jaxx liberty wallet
why not find out more download jaxx wallet
my explanation toast wallet passphrase
look what i found jaxx liberty wallet
discover this info here jaxx
you can try this out xrp wallet
informative post jax wallet
Read More Here jaxx wallet
click here for info jaxx liberty wallet
read this article xrp wallet
why not try these out jaxx app
Discover More Here jaxx wallet
click here for more jax wallet
Check This Out toast wallet passphrase
pop over to this web-site toast wallet passphrase
Excellent resource with valuable information. Thanks for sharing this so clearly.
index toast wallet passphrase
see post jaxx
visit site jaxx liberty wallet
click for source toast wallet
read here jaxx liberty wallet
visit this site download jaxx wallet
find out toast wallet passphrase
зайти на сайт Усн, осно
view it now https://vapeheart.shop/
this link https://vapeheart.shop/
Bonuses https://vapeheart.shop
Читать далее Оптимизация ндс
нажмите здесь Ликвидация, банкротство
his response https://vapeheart.shop/
узнать больше Здесь Усн, осно
Узнать больше Регистрация ооо, ип, внесение егрюл
check out here https://vapeheart.shop
веб-сайт Помощь 115, зск
her response https://vapeheart.shop
his explanation jaxx wallet
my website jaxx liberty
official site https://vapeheart.shop/
have a peek at this website jaxx liberty
Перейти на сайт Открытие счета
посетить сайт Ликвидация, банкротство
Learn More toast wallet download
пояснения Реорганизация
this https://vapeheart.shop
check it out jaxx liberty
read more jaxx wallet
pop over to these guys https://vapeheart.shop
Look At This jaxx liberty
Get the facts jaxx liberty
Your Domain Name jaxx
сайт Оптимизация ндс
blog https://vapeheart.shop
интернет Бухгалтерские услуги
this https://vapeheart.shop/
посетить веб-сайт Бухгалтерские услуги
read the full info here https://vapeheart.shop
скачать казино мостбет http://mostbet2033.help
hop over to these guys jaxx liberty
Get More Info https://vapeheart.shop
подробнее здесь Реорганизация
интернет Как Не платить налоги законно
сайт сайт vodka bet
в этом разделе Открытие счета
пояснения Купить ооо
have a peek at this web-site https://vapeheart.shop/
To create stamps at home or in the office, you can use the servicecreate stamp online free, позволяющим быстро и качественно создавать необходимые печати без выхода из дома.
The online platforms provide a user-friendly interface that allows users to design and customize their stamps with ease, without requiring any special skills or equipment.
Another benefit of online rubber stamp makers is that they provide a wide range of design options and templates, allowing users to customize their stamps to suit their specific needs.
Furthermore, the platform should provide excellent customer service, with support available via phone, email, or live chat.
In conclusion, online rubber stamp makers have revolutionized the way we create and use custom stamps, offering a convenient, flexible, and cost-effective solution for businesses, crafters, and individuals alike.
Главная Купить ооо
useful link https://vapeheart.shop/
learn this here now https://vapeheart.shop
click reference https://vapeheart.shop/
see this website https://vapeheart.shop
нажмите здесь Регистрация ооо, ип, внесение егрюл
https://linebet.games/
такой Ликвидация, банкротство
find out https://vapeheart.shop/
перейдите на этот сайт Купить ооо
over at this website https://vapeheart.shop/
resource https://vapeheart.shop/
you can try these out https://vapeheart.shop/
нажмите здесь зеркало vodkabet
нажмите здесь Учредительные уставные документы
взгляните на сайте здесь Купить фирму
в этом разделе Оптимизация налогооблажения
try this web-site https://vapeheart.shop/
read review https://vapeheart.shop
page https://vapeheart.shop/
Go Here https://vapeheart.shop
содержание зеркало водкабет
ссылка на сайт Ликвидация, банкротство
читать Ликвидация, банкротство
узнать водка бет
great site https://vapeheart.shop
click this link now https://vapeheart.shop/
взгляните на сайте здесь Купить фирму
address https://vapeheart.shop/
подробнее Помощь 115, зск
пояснения Ликвидация, банкротство
Find Out More https://vapeheart.shop/
Source https://vapeheart.shop/
узнать casino vodka
more helpful hints https://vapeheart.shop
перенаправляется сюда Ликвидация, банкротство
Узнать больше Усн, осно
пояснения Купить ооо
подробнее Как Не платить налоги законно
здесь Камеральная, выездная проверка
look at this site https://vapeheart.shop/
go to my blog https://vapeheart.shop/
my response https://vapeheart.shop
здесь Реорганизация
that site https://vapeheart.shop/
published here jaxx app
перейти на сайт Учредительные уставные документы
go to my site jaxx crypto
browse this site jax wallet
посмотреть в этом разделе зеркало водкабет
click this link now jaxx liberty
Salut à tous, je voulais partager ma petite analyse sur l’engouement actuelle concernant le génial jeu plinko. Personnellement, je trouve que c’est devenu le divertissement le plus relaxant sur le marché. À l’opposé des slots ordinaires, ici le joueur possède tout à fait le contrôle sur le risque et le nombre de lignes. Par ailleurs, j’ai vu un super https://elearnportal.science/wiki/User:ShellyBrittain4 qui analyse clairement de quelle manière améliorer ses parties. C’est plutôt impressionnant de constater combien la fameuse pastille est capable de basculer de trajectoire au ultime seconde. Est-ce que vous avez une astuce précise afin de viser les énormes multiplicateurs sur les côtés ? Pour ma part, j’aime bien généralement le niveau de risque moyen afin de miser plus longtemps sans pour autant cramer mon capital trop vite. Et vous, vous misez davantage avec le démo soit directement en argent réel ? Je suis impatient de découvrir vos retours sur ce sujet !
page jaxx liberty
check this download jaxx wallet
browse around these guys jaxx wallet
Home Page jax wallet
browse around here jax wallet
click this site jax wallet
have a peek here jaxx wallet
website link jaxx liberty
read this jaxx wallet
next page download jaxx wallet
check these guys out jaxx liberty
his comment is here jaxx wallet
read more jaxx crypto
original site download jaxx wallet
official source download jaxx wallet
great site jaxx liberty
their explanation jaxx liberty
this article jaxx wallet
https://spinbetter.black/pakistan/
Continue Reading jaxx crypto
Website jaxx wallet
Source jaxx wallet
webpage jaxx liberty wallet
this content jaxx
browse around this web-site jax wallet
I’m grateful for content creators who truly care.
hop over to these guys jaxx liberty wallet
go to my site jax wallet
look at this now jaxx liberty
check it out download jaxx wallet
Your writing style makes complex topics surprisingly approachable.
Узнать больше казино водкабет
article jaxx crypto
сайт зеркало vodkabet
read what he said jax wallet
you could look here jaxx wallet
my sources download jaxx wallet
my company jaxx liberty
click to find out more jaxx app
go to this website jaxx app
her latest blog jaxx wallet
address jaxx crypto
здесь водкабет
look at this web-site jaxx wallet
check that jaxx liberty wallet
you can try here jaxx liberty
why not try this out jaxx liberty wallet
visit jaxx app
more info here jaxx liberty wallet
content jaxx app
Читать далее водка бет
посмотреть на этом сайте vodka casino
777bet online casino.
With advanced encryption technologies and strict privacy policies, players can gamble with peace of mind.
click this over here now jaxx liberty
published here jaxx liberty
wikipedia reference jaxx wallet
more helpful hints jax wallet
click this over here now download jaxx wallet
узнать больше Здесь vodkabet
see this here jax wallet
read this jaxx wallet
take a look at the site here jaxx wallet
look at here jax wallet
learn this here now jaxx liberty
Look At This jaxx
go now jax wallet
Our site jaxx liberty wallet
recommended you read jaxx app
Linebet
продолжить казино водкабет
our website jaxx app
click over here jax wallet
my blog jaxx wallet
article jax wallet
Мир онлайн-слотов растёт: новые провайдеры, повышенные RTP и постоянные турниры поддерживают интерес игроков.
Vavada удерживает позиции в топе, но не забывайте проверять лицензию и лимиты перед депозитом.
Выбирайте автоматы с бонусными раундами, бесплатными вращениями и прогрессивными джекпотами — так повышается шанс крупного выигрыша.
Зеркала решают проблему блокировок и позволяют оперативно выводить средства без лишних задержек.
Актуальные возможности доступны здесь: https://temp-tools.kz//vendor/pgs/index.php?nel_kten_vavada_aynasu__azghet_.html.
Играйте ответственно и контролируйте банкролл, чтобы азарт оставался в пределах удовольствия.
Vavada остаётся одним из самых обсуждаемых казино благодаря щедрым бездепозитным промокодам и частым бонусам на фриспины.
Перед тем как активировать предложение, убедитесь, что промокод действителен сегодня и подходит под условия конкретной акции.
Слоты с высокой отдачей и турниры с гарантированными призами помогают быстро увеличить банкролл даже без крупного депозита.
Регистрация занимает пару минут, после чего становится доступен личный кабинет и быстрый вывод средств на банковскую карту.
Актуальные промокоды, бонус?коды и рабочее зеркало ждут по ссылке: https://new-bonus.vip/.
Играйте ответственно и контролируйте бюджет, чтобы азарт приносил удовольствие, а не проблемы.
click here to investigate jaxx app
see this download jaxx wallet
read the article jaxx wallet
Website jaxx liberty
Click This Link download jaxx wallet
Погружайтесь в захватывающий мир авиатор казино онлайн и испытайте удачу в игре на деньги!
Его отличительной чертой является простота и доступность.
see jaxx wallet
https://livecasinohouse.games/jp/
I appreciate your honest and transparent communication throughout.
Если вам нужна аренда авто новосибирск с водителем, обращайтесь к нам — мы гарантируем комфорт и безопасность на дороге.
Главным фактором популярности является комфорт и безопасность, которые предоставляет аренда с водителем.
Узнайте подробности по установка забора из штакетника и сделайте правильный выбор.
Тщательное планирование всех этапов позволит составить точный бюджет.
que es 1win que es 1win
https://888starz.plus/sri-lanka/app/
посмотреть в этом разделе kraken актуальные ссылки
пояснения кракен darknet
подробнее kraken onion ссылка
узнать больше кракен darknet
в этом разделе kra ссылка
можно проверить ЗДЕСЬ kraken darknet ссылка
содержание kraken onion
на этом сайте kraken onion зеркала
перейдите на этот сайт kraken зеркало рабочее
Подробнее кракен онион
Натяжные потолки дают ровную геометрию и стабильный цвет на годы, полотно с микротекстурой позволяет подобрать оттенок под стены и мебель; можно заранее спланировать скрытый карниз и подсветку по проекту – натяжные потолки в москве цены с установкой
зайти на сайт актуальные зеркала kraken
на этом сайте kraken зеркало рабочее
узнать больше kraken ссылка тор
фільми жахів онлайн кримінальні серіали дивитися онлайн
Мир онлайн-слотов растёт: новые провайдеры, повышенные RTP и постоянные турниры поддерживают интерес игроков.
Vavada удерживает позиции в топе, но не забывайте проверять лицензию и лимиты перед депозитом.
Выбирайте автоматы с бонусными раундами, бесплатными вращениями и прогрессивными джекпотами — так повышается шанс крупного выигрыша.
Зеркала решают проблему блокировок и позволяют оперативно выводить средства без лишних задержек.
Актуальные возможности доступны здесь: подробнее.
Играйте ответственно и контролируйте банкролл, чтобы азарт оставался в пределах удовольствия.
Следующая страница kraken ссылка зеркало
посмотреть на этом сайте kraken актуальные ссылки
https://spinbetter.blue/eg/
перейдите на этот сайт сайт kraken darknet
накрутка живых телеграм — накрутка живых телеграм
You’ve provided solutions that work in practice.
Для кинотеатров, конференц-залов и домашних кинозалов подойдет экран для проектора, который можно заказать на сайте.
обязательны для демонстрации фильмов и презентаций. Они способствуют повышению эффективности презентаций. Кроме того, существуют различные модели экранов для проекторов, удовлетворяющих разным потребностям .
Экраны делятся на различные категории в зависимости от размера и функциональности. Для мероприятий и презентаций в крупных залах существуют уникальные предложения на рынке. Это дает возможность подобрать наиболее подходящий экран для конкретных задач.
Экраны для проекторов различаются по принципу конструкции. Это экраны с ручным управлением , которые устанавливаются на стену или потолок . Кроме того, есть варианты для различных условий освещения.
Экраны для задней проекции используются в специфических условиях . Они способствуют повышению эстетики презентации. Это делает их высоко востребованными .
При выборе экрана для проектора следует обратить внимание на несколько важных критериев . Это уровень освещения в помещении, которые обуславливают выбор материала экрана. Кроме того, необходимо проанализировать стоимость и эксплуатационные расходы .
Экраны следует выбирать с учетом условий эксплуатации. Это обуславливает повышение эффективности презентаций. Поэтому следует изучить отзывы и рейтинги .
Экраны для проекторов играют решающую роль в формировании качества презентаций . Они должны быть выбраны с учетом всех необходимых факторов . Это обуславливает повышение эффективности презентаций. Поэтому следует учитывать все возможные варианты.
Читать далее kra ссылка
содержание кракен онион
страхи онлайн якість безкоштовні серіали в хорошій якості
накрутка подписчиков в тг канал накрутка подписчиков в телеграм канал
узнать больше маркетплейс
Note that this is an early preview of rewards and they may be subject to change. Items with a duration are ephemeral treasures, and will remain in your inventory after the duration. Poker Casino Games Dragon pearls hold and win the game offers a thrilling experience that combines luck, however. Sorry, this product is unavailable. Please choose a different combination. Orientxpress Casino Login App Sign Up Win Casino No Deposit Bonus Codes For Free Spins 2025 But thats probably a cynical way to look at things, including Microgaming and Playtech. Playing at Bizzo Casino on iOS devices is similar to playing on your Android device, where there’s a top prize of 20,000 stake to aim for. 5 Good reasons to play in the online casino. If you stick it out, the dealer then reveals the rest of their cards and only plays if they have an Ace-King high or better. If they don’t, then they don’t qualify for the round at all, and you automatically win. If they do, then the usual hand rankings count.
https://ftcpak.net/122/rooli-online-casino-game-review-for-australian-players/
Playfina Casino welcomes Australian players to a thrilling online gaming experience filled with energy, variety, and generous rewards. From classic slots and live dealer tables to modern jackpot games, every player can find something exciting. The platform is fully optimised for both desktop and mobile use, ensuring smooth gameplay whether you’re spinning reels at home or on the go. With top-tier software providers like Pragmatic Play, NetEnt, and Evolution Gaming, Playfina Casino guarantees high-quality entertainment and fair play. Play for free 15 dragon pearls free spins no deposit its being behind the wheel for a racing icon and hopefully becoming one yourself in a decade or so, the win from your current round will produce a new multiplier. Pros and Cons of using Maestro Poker deposits, which is carried forward in the next round. However, Slots Jungle has all the features of a casino that will have a long and prominent presence in the online casino world. Anyone who wants to play for money at Island should familiarize themselves with the conditions for triggering bonus modes, all slots club casino in real-time.
ecold
сайт магазин
перейдите на этот сайт вход
нажмите здесь https://krab3a.at
Смотреть здесь https://krab3a.cc/
Clear, concise, and practical information. I appreciate how easy it is to follow.
посмотреть на этом сайте маркетплейс
продолжить https://krab3a.at
опубликовано здесь капча
опубликовано здесь https://krab3a.cc/
здесь https://krab3a.cc/
веб-сайте кра
Продолжение кракен
нажмите, чтобы подробнее krab2.cc
Если потолки низкие важно выбрать правильный профиль и тип полотна также Световые линии выглядят минималистично но требуют точной разводки и крепежа Уточните тип профиля крепежа и гарантию на монтаж чтобы потом не возникло вопросов так можно обновить свет не ломая отделку и сохранить высоту: https://natyazhnye-potolki-moskva.ru/
нажмите, чтобы подробнее https://krab3a.at/
нажмите, чтобы подробнее https://krab3a.cc
сюда площадка
найти это площадка
перейдите на этот сайт https://krab3a.at
spin better
читать https://krab3a.at/
здесь krab3.cc
веб-сайт https://krab3a.cc
кликните сюда маркетплейс
найти это https://krab3a.at
нажмите https://krab3a.at
ссылка на сайт https://krab3a.cc/
1win foydalanuvchi fikrlari https://MAQOLALAR.UZ
нажмите кракен зеркало
visit this website https://swapzome.cc
Узнать больше kraken доступ
from this source https://prlvnote.com
my blog https://onefimesecret.com
интернет kraken вход
этот контент krab3.at
check my site https://simpleswap.cc/
веб-сайте кракен ссылка
Источник krab3 cc
Следующая страница kraken krab зеркало
go right here https://cryptoarbitrage.sh/
useful content https://cryptoarbitrage.sh
Web Site https://simpieswap.app/
интернет https://krab3.cc
check my site https://swapzome.cc/
сайт kraken krab
на этом сайте кракен вход
нажмите здесь kraken krab зеркало
содержание kraken маркетплейс
можно проверить ЗДЕСЬ https://krab3.cc
betlabel
find out this here https://onetimesecret.info/
Источник krab3.at
navigate to this website https://simpleswap.cc/
from this source https://cryptoswap.cc
здесь kraken маркетплейс
на этом сайте krab3at
view publisher site https://slmpleswap.app/
можно проверить ЗДЕСЬ кракен маркет
browse around this website https://swapzome.cc/
home https://onetlmesecret.com/
visit this site right here https://onefimesecret.com
Bonuses https://onefimesecret.com
visit here https://onefimesecret.com/
Thank you admin.
Перейти на сайт kraken krab зеркало
Extra resources https://onetlmesecret.com
сайт krab3at
helpful hints https://swapzome.cc/
посмотреть на этом сайте kraken вход
This Site https://usdtswaptrx.com
you could try these out https://onetimesecret.info
здесь https://krab3.cc
click now https://onetlmesecret.com
Следующая страница kraken krab зеркало
Смотреть здесь krab3 cc
Смотреть здесь krab3 at
Продолжение krab3cc
1вин ios приложение 1вин ios приложение
сайт кракен зеркало
посетить сайт kraken krab зеркало
Just now, I had to find Zithromax without waiting and found a reliable pharmacy. It allows you to purchase generics online safely. For treating sinusitis, check this shop. Express delivery available. More info: check availability. Cheers.
Your insights have helped me see new possibilities.
купить диплом несуществующего вуза купить диплом несуществующего вуза .
вк накрутка друзей вк накрутка друзей ТОП лучших сервисов
как набрать просмотры в Телеграм бесплатно как набрать просмотры в Телеграм бесплатно ТОП лучших сервисов
Купить диплом университета Вряд ли вы захотите потерять пять лет жизни на то, чтобы “официально” получить умения и навыки, которые уже присутствуют. В данном случае решение заказать официальный диплом о высшем образовании станет для вас наиболее выгодным. Вам необходимо сделать не так много – выбрать компанию, занимающуюся изготовлением документов об образовании на заказ. Это позволит вам за незначительную сумму и в кратчайшие сроки получить диплом из любого высшего учебного заведения страны: petitieonline.com/499684
Immerse yourself in the atmosphere of gambling excitement with pin up casino brasil and feel the style and drive of pin up!
Together, these features create a signature style merging nostalgic pin-up visuals with Brazil’s inventive culture.
Check helping guide.
win ставки на спорт http://www.1win12046.ru
ван вин букмекерская контора http://1win12047.ru
накрутка просмотров телеграм накрутка просмотров на истории в тг бесплатно
накрутка просмотров телеграм накрутка просмотров на истории в тг бесплатно
Для качественного ухода за вашим автомобилем посетите детейлинг полировка кузова.
Следующий шаг предполагает обработку поверхности кузова с помощью полировки и реставрации.
To be honest, I had to find Doxycycline urgently and discovered a reliable pharmacy. You can get treatment fast safely. In case of a bacterial infection, this is the best place. Overnight shipping guaranteed. Visit here: http://antibioticsexpress.com/#. Hope you feel better.
Откройте для себя невероятные возможности в 1win aviator 1 и погрузитесь в захватывающий мир азартных игр!
Безопасность пользователей – это один из приоритетов казино Aviator.
Погружайтесь в захватывающий мир авиатор казино онлайн и испытайте удачу в игре на деньги!
Любой игрок сможет легко ориентироваться в каталогах и быстро начать игру.
Recently, I needed Ciprofloxacin fast and stumbled upon Antibiotics Express. It allows you to get treatment fast safely. In case of a bacterial infection, try here. Discreet packaging available. Go here: http://antibioticsexpress.com/#. Highly recommended.
the dog house slot Gates of Olympus от Pragmatic Play —
Слот Gates of Olympus — известный игровой автомат от Pragmatic Play с системой Pay Anywhere, каскадами и коэффициентами до ?500. Действие происходит на Олимпе, где бог грома повышает выплаты и делает каждый раунд случайным.
Игровое поле представлено в виде 6?5, а комбинация засчитывается при появлении не менее 8 одинаковых символов в любом месте экрана. После выплаты символы удаляются, на их место опускаются новые элементы, активируя каскады, которые могут дать несколько выплат за одно вращение. Слот является игрой с высокой волатильностью, поэтому не всегда даёт выплаты, но при удачных раскладах может принести большие выигрыши до ?5000 от ставки.
Чтобы разобраться в слоте доступен демо-режим без вложений. Для игры на деньги рекомендуется использовать лицензированные казино, например MELBET (18+), принимая во внимание заявленный RTP ~96,5% и условия площадки.
Hello! I understand this is sort of off-topic but I had to ask. Does operating a well-established blog such as yours require a lot of work? I am brand new to blogging however I do write in my journal daily. I’d like to start a blog so I can easily share my own experience and feelings online. Please let me know if you have any recommendations or tips for new aspiring bloggers. Thankyou!
https://ritual.in.ua/yak-pravylno-pidibraty-perekhidnu-ramku-dlya.html
Simply desire to say your article is as astonishing. The clearness to your submit is simply excellent and that i can assume you are an expert on this subject. Well along with your permission let me to grasp your RSS feed to stay updated with coming near near post. Thank you 1,000,000 and please continue the enjoyable work.
https://e-art.com.ua/vw-touareg-gp-nf-cr-problema-trishchyn-vid.html
gates of olympus демо
Слот Gates of Olympus — востребованный игровой автомат от Pragmatic Play с системой Pay Anywhere, каскадными выигрышами и усилителями выигрыша до ?500. Игра проходит у врат Олимпа, где бог грома повышает выплаты и делает каждый спин случайным.
Экран игры представлено в виде 6?5, а выплата начисляется при сборе не менее 8 идентичных символов в любой позиции. После расчёта комбинации символы пропадают, на их место опускаются новые элементы, формируя цепочки каскадов, которые могут дать дополнительные выигрыши за один спин. Слот считается высоковолатильным, поэтому может долго раскачиваться, но при удачных каскадах способен порадовать крупными выплатами до 5000 ставок.
Для знакомства с механикой доступен бесплатный режим без вложений. При реальных ставках рекомендуется рассматривать лицензированные казино, например MELBET (18+), ориентируясь на RTP около 96,5% и условия площадки.
Actively sorted content.
Приобрести официальный диплом о высшем образовании : peticijaonline.com/498946
Well pleased with this.
проверить сайт https://kinogo.blue/filmy/1972-delo-hrabryh.html
Подробнее здесь https://kinogo.blue/filmy/2453-pozhiratel-boli.html
Продолжение https://kinogo.blue/filmy-2024g/1838-pervyy-brak-dzhordzhi-i-mendi.html
содержание https://kinogo.blue/filmy/1773-chas-tishiny.html
выберите ресурсы https://kinogo.blue/filmy-2025/
накрутка просмотров в тг бесплатно накрутка просмотров в тг
Thank you admin.
Thank you admin.
browse around these guys jaxx wallet
содержание https://kinogo.blue/filmy/1057-creed-iii-2023-webdl1.html
читать https://kinogo.blue/filmy/1066-222-film-2016-hd.html
накрутка просмотров телеграм сервис накрутки просмотров в тг
Going Here jaxx liberty
узнать больше https://kinogo.blue/filmy/2450-poezdka-v-arendu.html
important link download jaxx wallet
look at here now jaxx liberty wallet
Perfectly timed content.
official website jaxx crypto
have a peek at this site jax wallet
нажмите здесь https://kinogo.blue/filmy-2017/2021-spyaschie.html
Узнать больше https://kinogo.blue/filmy/2283-po-lyubvi.html
Try your luck and win big in slotgpt casino!
The platform uses state-of-the-art encryption to protect user data.
Главная https://kinogo.blue/
Thank you admin.
Thank you admin.
посмотреть на этом сайте https://kinogo.blue/filmy/2519-dom-u-ozera.html
fc777 slot offers the best slot machines and generous bonuses for all players.
As fc777 evolves, it is expected to shape various domains extensively.
узнать больше https://kinogo.blue/filmy/1781-nado-bylo-ehat-v-greciyu.html
можно проверить ЗДЕСЬ https://kinogo.blue/filmy/1739-korni.html
Следующая страница https://kinogo.blue/filmy-2024g/1812-demis-i-marina.html
в этом разделе https://kinogo.blue/filmy/1071-zhivoe-2017-film.html
Подробнее https://krab3a.at/
подробнее https://kinogo.blue/filmy/2304-vkusnyatina.html
Следующая страница https://kinogo.blue/filmy/2024-rakka.html
подробнее https://kinogo.blue/filmy/2256-v-glubine.html
выберите ресурсы https://kinogo.blue/filmy/2854-amerikanskiy-ogurchik.html
узнать больше https://kinogo.blue/filmy/2655-seks-po-druzhbe.html
посетить сайт https://kinogo.blue/filmy/1325-zvezdnye-vojny-poslednie-dzhedai.html
такой https://kinogo.blue/filmy/1063-krov-2022.html
узнать больше Здесь https://kinogo.blue/filmy/2457-tri-tysyachi-let-zhelaniy.html
узнать больше https://kinogo.blue/filmy/679-cherepashki-nindzja-2-2016.html
узнать больше https://kinogo.blue/filmy/2070-sekretnyy-agent.html
сайт https://kinogo.blue/filmy/2836-ekstrasens.html
выберите ресурсы https://kinogo.blue/filmy/2433-absolyutnoe-gospodstvo.html
перейдите на этот сайт https://kinogo.blue/filmy-2017/1987-bolshoy-rot.html
посмотреть в этом разделе https://kinogo.blue/filmy/1837-ebigeyl.html
подробнее https://kinogo.blue/filmy/1106-dvadcat-odno.html
Подробнее https://kinogo.blue/filmy/1139-vojna-mirov.html
узнать больше https://kinogo.blue/filmy/2775-gospodin-nikto.html
можно проверить ЗДЕСЬ https://kinogo.blue/filmy/2211-bastion-36.html
нажмите, чтобы подробнее https://kinogo.blue/filmy/1849-lovushka.html
веб-сайте https://kinogo.blue/filmy-2017/2083-lesnik-svoya-zemlya.html
ссылка на сайт https://kinogo.blue/filmy/2327-umeret-ne-prosnuvshis.html
Перейти на сайт https://kinogo.blue/filmy-2025/1674-institut-izucheniya-kartofelya.html
такой https://kinogo.blue/filmy/2279-korol-kalifornii.html
Appropriate depth achieved.
веб-сайт https://kinogo.blue/multfilmy/2679-elvin-i-burunduki-2.html
кликните сюда https://kinogo.blue/filmy/2334-lyubovnaya-afera.html
Для организации вашего события идеально подойдут браслет на руку бумажный браслет для мероприятий, которые обеспечат надежный контроль доступа и удобство для гостей.
Браслеты бумажные стали востребованным аксессуаром для различных мероприятий.
узнать https://kinogo.blue/filmy/1881-substanciya.html
Следующая страница https://tripscans01.cc/
подробнее здесь https://tripscans01.cc/
такой https://tripscan01.cc
Подробнее здесь https://tripscan01.cc
Рассрочка платежей при лизинге обеспечивает финансовую стабильность компании.
купить спецтехнику в лизинг купить спецтехнику в лизинг.
Мы изготавливаем дипломы любых профессий по выгодным ценам. Купить справку об обучении — o91707v5.beget.tech/2025/10/12/kupit-diplom-starogo-ili-novogo-obrazca.html
777bet app.
With its wide range of games, enticing promotions, and intuitive interface, this site appeals to many players.
Thanks for the outstanding resource.
捕风追影下载平台AI深度學習內容匹配,專為海外華人設計,提供高清視頻和直播服務。
中華職棒即時比分台灣球迷的首選資訊平台,提供最即時的中華職棒即時比分新聞、球員數據分析,以及精準的比賽預測。
Just now, I was looking for Zithromax without waiting and came across a great source. They let you order meds no script securely. If you have sinusitis, check this shop. Express delivery available. Check it out: cheap generic antibiotics. Hope you feel better.
Summarizing guide defined.
Накрутить подписчиков в telegram безопасно можно только при соблюдении рекомендаций по скорости роста. https://vc.ru/telegram/2686955-nakrutka-podpischikov-v-telegram-luchshie-servisy Постепенное добавление участников имитирует органический рост и не вызывает санкций платформы.
ifvod平台结合大数据AI分析,专为海外华人设计,提供高清视频和直播服务。
Монетизация канала становится возможной при достижении определенного количества активных подписчиков. https://vc.ru/telegram/2686955-nakrutka-podpischikov-v-telegram-luchshie-servisy Большинство рекламных бирж устанавливают минимальные требования к размеру аудитории для начала сотрудничества.
UEFA Super Cup live scores, Champions League vs Europa League winners clash
24小時即時更新nba即時比分、賽程表,以及NBA球星數據統計和表現分析。
Amazing issues here. I am very happy to see your post. Thank you a lot and I am taking a look ahead to contact you. Will you please drop me a e-mail?
cudovusta igrice
Just now, I needed Zithromax quickly and found this amazing site. You can buy antibiotics without a prescription securely. In case of a bacterial infection, try here. Overnight shipping to USA. Link: buy antibiotics online. Good luck.
index http://adoptionconference.net/how-i-track-solana-nfts-and-tokens-like-a-detective-without-losing-my-mind/
check that https://davina-simantob.demoweblink.xyz/why-desktop-wallets-with-yield-farming-and-cashback-are-suddenly-worth-a-second-look/
сайты онлайн казино Gates of Olympus slot —
Gates of Olympus slot — известный слот от Pragmatic Play с системой Pay Anywhere, каскадными выигрышами и усилителями выигрыша до ?500. Сюжет разворачивается в мире Олимпа, где Зевс повышает выплаты и превращает каждое вращение случайным.
Сетка слота имеет формат 6?5, а выплата начисляется при выпадении 8 и более идентичных символов без привязки к линиям. После выплаты символы удаляются, на их место опускаются новые элементы, формируя каскады, способные принести несколько выплат в рамках одного вращения. Слот относится игрой с высокой волатильностью, поэтому способен долго молчать, но при удачных раскладах даёт крупные заносы до 5000 ставок.
Для тестирования игры доступен демо-режим без вложений. Для ставок на деньги целесообразно выбирать лицензированные казино, например MELBET (18+), учитывая RTP около 96,5% и условия конкретной платформы.
check out the post right here https://sparkon.se/backup-cold-storage-and-firmware-how-to-really-protect-your-crypto-without-losing-your-mind/
see this page https://apploto188.com/designing-governance-and-weighted-liquidity-pools-that-actually-work/
read the article http://ultracort.com.br/why-a-monero-wallet-is-still-the-best-start-for-real-transaction-privacy/
anchor https://yesilimarket.com/why-solana-defi-validator-rewards-and-a-good-wallet-matter-more-than-ever/
wikipedia reference https://reoconstructiongh.com/why-new-token-pairs-on-dex-screener-are-your-best-early-alarm-for-volatility/
visit the website https://www.summer-pro.com.hk/how-i-track-sol-wallets-read-transactions-and-build-practical-solana-analytics/
click now https://egehistory.ru/why-liquidity-pools-feel-like-wild-west-banks-and-how-to-farm-yield-without-getting-burned/
you could try this out https://jandjauctions.com/making-ibc-moves-staking-swaps-and-staying-safe-in-cosmos-wild-west/
go to this website https://savingdreamzfoundation.com/running-a-full-node-while-mining-bitcoin-practical-unvarnished-advice-for-power-users/
Continue https://homezonline.in/uncategorized/why-your-next-move-in-defi-should-start-with-better-price-alerts/
directory https://sadfmilitaryveteransstories.co.za/haven-protocol-privacy-wallets-and-the-art-of-leaving-no-trail/
Check Out Your URL https://www.prolococaiazzo.net/why-desktop-wallets-need-better-hardware-support-and-what-that-means-for-yield-farming/
official source http://cemb.hu/why-ctrader-feels-like-the-right-trading-room-for-serious-forex-traders/
useful link https://sandhyavillaubud.com/2025/11/12/reading-the-chains-practical-ways-to-track-erc-20-tokens-defi-flows-and-gas-in-real-time/
try this web-site https://monoemart.com/why-mobile-wallets-must-stop-being-a-liability-for-defi/
my company https://drop.workinnet.com.br/why-stargate-layerzero-backed-changed-how-i-think-about-cross-chain-bridges/
go to these guys https://skillmirror.in/?p=11004
advice https://www.thekenbrown.com/why-multisig-on-a-lightweight-desktop-wallet-changes-the-game-for-hardware-backed-bitcoin/
click here to read https://maru-koji.com/how-i-manage-a-multichain-portfolio-nfts-and-dapps-without-losing-my-mind/
here https://cleagas.com.br/why-privacy-coins-matter-and-why-they-re-messier-than-they-look/
you could try these out https://upstateinteriorsllc.com/reading-the-tape-market-cap-price-alerts-and-where-yield-farming-actually-pays/
click this link here now https://panel.skheartcarehospital.in/why-decentralized-prediction-markets-might-be-the-most-honest-price-feed-we-ve-got/
useful site https://www.mmiahproperty.co.uk/buy-crypto-with-your-card-and-keep-it-safe-on-mobile-a-practical-guide/
my latest blog post https://asociatia.pahumi.ro/why-monero-still-matters-a-real-talk-about-privacy-trade-offs-and-responsibility/
he said https://assicoloridellavita.it/why-your-next-mobile-wallet-should-be-private-multi-currency-and-not-annoy-you/
important source http://griffin26-001-site7.atempurl.com/how-i-track-new-token-pairs-and-real-time-prices-practical-dex-screener-workflows/
see post https://jaybabani.com/ultra-wp-admin/?p=120968
get more https://www.beautyworkshopacademy.com/picking-a-secret-network-validator-hunting-airdrops-and-staying-safe-a-pragmatic-guide/
visit this web-site https://wordpress-322531-4419953.cloudwaysapps.com/why-monero-s-stealth-addresses-matter-and-what-they-actually-protect/
investigate this site https://openteam.com.ua/why-solana-nfts-built-in-swaps-and-your-seed-phrase-are-the-trio-you-actually-need/
informative post https://aromborbd.com/2025/05/08/why-coinjoin-still-matters-a-pragmatic-look-at-bitcoin-privacy/
check this link right here now https://staging.project-progress.net/projects/merlin/why-cross-chain-swaps-and-advanced-trading-in-your-browser-matter-right-now/
blog here https://wordpress-726587-2423642.cloudwaysapps.com/security-first-defi-wallets-why-features-multi-chain-support-and-transaction-simulation-actually-matter/
i thought about this https://pojokgarut.com/why-voting-escrow-ve-models-matter-a-practical-take-on-vetokenomics-for-defi-liquidity-providers/
description https://spsmart.vn/why-prediction-markets-matter-for-crypto-traders-liquidity-pools-and-real-world-events/
you can look here http://mingchewang.mkjnews.com/archives/4652
read review https://saudifriendship.org.sa/2025/04/19/why-a-multicurrency-mobile-wallet-actually-changes-how-you-handle-crypto/
check over here https://ww-corp.com/why-your-mobile-wallet-private-keys-and-walletconnect-deserve-more-respect-and-a-plan-2/
you could try here https://milkywayexpress.us/nfts-portfolios-and-spot-trading-a-practical-playbook-for-multi-chain-defi-users/
Thank you admin.
Thank you admin.
see this website https://nurturedprofits.com/2025/10/17/why-signing-transactions-in-your-browser-extension-feels-risky-and-how-to-make-staking-rewards-work-for-you/
Get More Information http://hzlvchen.com/news/co-news/1693.html
more information https://stamisuli.hu/why-cex-integration-trading-tools-and-defi-access-together-matter-a-trader-s-practical-guide/
More Bonuses https://new.elephant-dent.com/why-a-web-version-of-phantom-changes-how-you-use-nfts-on-solana/
click for info https://nhandientu.com/how-i-track-defi-moves-real-dex-analytics-pair-signals-and-price-radar-that-actually-help/
official statement https://dev.optrel.us/why-a-cex-dex-bridge-with-portfolio-tracking-and-multi-chain-support-matters-for-browser-wallet-users/
Click This Link https://kali.mi2a-innovation.com/why-privacy-wallets-still-matter-and-how-to-choose-one-for-monero-bitcoin-and-beyond/
view website https://relacionesybienestar.com/why-i-still-trust-cosmos-for-staking-and-ibc-a-practical-guide-for-terra-users/
use this link https://www.victory.si/why-i-still-use-an-explorer-to-read-ethereum-like-a-newspaper/
my company https://australegal.com.au/why-nft-support-walletconnect-and-swaps-make-or-break-a-self-custodial-wallet/
this content https://amarpacha.com/reading-the-ledger-practical-bnb-chain-analytics-for-real-world-tracking/
More about the author https://lacucanya.cat/2025/01/13/why-nft-marketplaces-staking-rewards-and-a-multi-chain-wallet-are-the-missing-trio-for-real-defi-utility/
Find Out More https://shop.vetreriediempoli.it/why-liquidity-pools-and-real-time-dex-analytics-are-your-new-trading-compass/
browse this site https://lesamilan.com/why-a-mobile-crypto-wallet-should-be-the-first-app-on-your-phone/
check these guys out https://beyondremedyny.com/how-i-use-real-time-charts-to-spot-trending-tokens-and-how-you-can-too/
Released liberated guide.
why not look here https://theshaheen.org/why-privacy-wallets-matter-a-practical-guide-to-mobile-xmr-and-multi-currency-security/
why not check here https://marvelsblog.com/pancakeswap-tracker-bnb-chain-explorer-a-practical-guide-for-real-world-monitoring/
investigate this site https://gcffr.org/tap-sign-secure-why-smart-card-hardware-wallets-matter-for-everyday-crypto/
here https://www.renovasirumahmentari.com/why-the-gas-tracker-matters-how-erc-20-behaves-and-the-real-way-to-verify-smart-contracts/
why not try this out https://car.prabhbir.com/carmanual/why-your-mobile-web3-wallet-needs-multi-chain-support-and-a-dapp-browser-real-talk/
site link http://thebrand.blog/news/1332/
image source http://ucg-int.com/?p=32387
Homepage https://www.eigra.edu.pe/uncategorized/why-copy-trading-on-mobile-changes-how-i-manage-a-multi-chain-crypto-portfolio/
visit site https://falvic.com/why-a-smart-card-might-be-the-best-cold-storage-hack-you-haven-t-tried/
have a peek at this website https://maryoyewunmi.com/why-a-privacy-first-multi-currency-wallet-with-a-built-in-exchange-actually-changes-the-game/
check this link right here now https://catnhanh.com/reading-the-bnb-chain-tea-leaves-practical-guide-to-bsc-transactions-and-defi-signals-3401/
find out this here https://metrocrest.zipporaa.com/how-top-exchanges-handle-security-withdrawals-and-kyc-what-traders-should-know/
Web Site https://mimpkwirogunan.sch.id/why-yield-farming-on-solana-feels-different-and-how-a-browser-wallet-changes-the-game/
read this https://hotelhillviewbandarban.com/cold-private-and-recoverable-a-realist-s-guide-to-crypto-security-backups-and-transaction-privacy/
about his http://mntspotok.ru/2025/12/18/why-liquid-staking-is-the-quiet-revolution-in-eth-and-how-validators-smart-contracts-and-rewards-actually-work/
you can try this out https://darommoveis.com.br/catalogo/cold-storage-that-actually-works-a-practical-look-at-hardware-wallets-and-why-trezor-still-matters/
find out here https://giangnamcamera.com/why-dex-screener-is-the-one-tab-edge-for-real-time-defi-traders
Get More Information https://elevagetypique.com/wp/why-the-dapp-browser-actually-matters-a-practical-guide-to-using-a-web3-wallet-2/
i was reading this http://backup.msquaredgallery.com/how-i-track-pancakeswap-swaps-on-bnb-chain-a-practical-forensics-walkthrough/
my company https://system-hedayati.com/yield-farming-spot-trading-and-hardware-wallets-a-real-world-playbook-for-multi-chain-defi-users/
click this link now https://warrenpa.net/how-i-actually-find-tokens-worth-trading-a-practical-guide-to-discovery-market-cap-and-volume/
my website https://prorh.com.br/mobile-decentralized-and-defi-ready-why-your-next-wallet-should-do-more-than-store-keys/
wikipedia reference https://www.mpnprecision.com/why-transaction-simulation-and-walletconnect-matter-for-secure-defi-ux/
he said https://www.ascenseursfacile.com/why-your-mobile-crypto-wallet-needs-more-than-a-seed-phrase-real-talk-on-security-cross-chain-swaps-and-private-keys/
check out here http://triloktest.wwwmi3-sr8.supercp.com/why-multisig-hardware-wallets-is-the-combination-that-finally-made-me-sleep-at-night/
check my site http://dev.resourceserver.in/demo/dine/bridging-the-gap-cex-dex-flows-portfolio-tracking-and-real-world-yield-optimization/
click here to find out more https://mightyoaksbooks.org/why-traders-should-care-about-defi-access-institutional-features-and-staking-and-how-an-okx-integrated-wallet-actually-helps/
other https://www.eltrueke.com.co/uncategorized/why-cross-chain-transactions-defi-integration-and-a-solid-browser-extension-matter-for-your-multichain-wallet/
pop over to this web-site https://duna.com.co/why-hardware-wallets-mobile-apps-and-yield-farming-on-solana-need-to-play-nice/
useful content https://kouroshshojaee.ir/why-transaction-simulation-is-the-secret-weapon-for-defi-power-users/
To download the game quickly and safely, use play8oy2 apk.
In today’s digital age, accessing mobile apps is easier than ever before. Play8oy2 is one of the most talked-about applications recently.
he has a good point https://shatryautoservices.com/multichain-nfts-and-instant-swaps-why-your-next-wallet-should-feel-like-a-trading-desk/
this article https://videotilldvd.com/staking-wallets-and-nfts-on-solana-a-practical-guide-from-someone-who-s-actually-used-them/
moved here https://www.biggesang.de/why-ibc-staking-rewards-and-airdrops-matter-and-how-to-navigate-them-safely/
see this http://www.termoshoop.it/uncategorized/how-i-keep-a-multi-chain-defi-portfolio-lean-safe-and-cheap/
try this https://caliptus-cars.com/why-swap-ux-and-transaction-signing-make-or-break-your-solana-wallet/
moved here https://thienduongtrochoi.skin/phantom-web-a-practical-slightly-opinionated-guide-to-using-a-solana-web-wallet/
Plinko je veselá i rychle známá zábava, jež získala přinesla pozornost řady uživatelů po celém světě. Daný druh zábavy patří mezi populární svojí jednoduchostí a přitažlivým vizuálním zpracováním, jež ihned přitahuje zrak. Hráči často neustále zajímají, jak https://superand.com/author/agustinfarn pracuje, kvůli aktivita kombinuje náhodu s příležitostí obdržet lákačné bonusy. Plinko online kasino poskytuje konkrétní aktivitu v rámci svoje nabídky, a umožňuje, aby uživatelé mohou komfortně zkusit jejich náhodu i plánování. Mezi z nejdůležitějších plusů hry Plinko zábavy spočívá své rychlý průběh plus snadná dostupnost – hráč nepotřebuje komplikovaně rozumět pravidlům, aby uměl účastnit se a vyhrávat. Plinko recenze velmi upozorňují, že tato konkrétní aktivita představuje vhodná pro začátečníky nové hráče, kteří chtějí hru bez komplikovaných komplikovaných strategií, plus rovněž pro zdatné hráče, kteří oblibují kombinují štěstí a s strategií. Tento titul zábava představuje také oblíbená u lidmi, což pozorují živé přenosy plus turnaje, protože tento grafické efekty plus interaktivní elementy dodávají hře dynamiku i adrenalin. U lokální osoby má významná překlad, proto Tento titul CZ nabízí zcela localizované menu a pokyny, a tím garantuje snadné hraní bez překážek jazykových limitů. Tato hra plinko patří mezi a nikoli jen lehce ovladatelná plus příjemná, rovněž i takticky přístupná pro všechny typy rozličné kategorie hráčů, což dokazuje její stoupající známku.
click for info https://cstricklandconsulting.com/why-a-dapp-connector-matters-bridging-browsers-wallets-and-multi-chain-defi/
read what he said https://ra-siemer-md.de/why-amms-yield-farming-and-defi-trading-still-freak-out-tradfi-and-why-that-s-okay/
home https://amnat.dole.go.th/senang/2025/10/15/why-swap-functionality-makes-or-breaks-your-mobile-multi-chain-wallet/
he said https://www.maistecnologia.com/google-melhora-previsoes-meteorologicas-com-novo-modelo-de-ia/
this link https://tienthanhvet.com/2025/04/02/why-cross-chain-bridges-trading-tools-and-defi-access-still-feel-like-the-wild-west/
go to website https://www.vivaautomacao.com.br/how-to-find-the-cheapest-safest-way-to-move-assets-cross-chain-and-why-aggregators-matter/
check https://nuoclassic.com/why-i-trust-solflare-for-solana-staking-defi-and-yield-farming-extension-mobile-guide/
learn the facts here now https://school9.ca/?p=738
Homepage https://www.skaraborggolf.se/2025/12/03/why-i-keep-coming-back-to-dex-token-swaps-a-practical-look-at-aster-dex-and-real-world-trade-mechanics/
you could try this out https://needhr.ro/why-relay-bridge-matters-a-practical-guide-to-multi-chain-defi-and-cross-chain-aggregation/
More Info https://mycabrera.com/blog/why-your-solana-stake-choice-matters-and-how-to-pick-a-validator-or-go-liquid-without-losing-sleep/
discover here https://archieseducationcentre.in/why-your-mobile-web3-wallet-should-feel-like-a-good-neighbor-and-how-to-pick-one/
try this web-site http://www.mozaikcom.com/why-solana-dapps-and-defi-are-changing-how-i-use-wallets-and-why-the-phantom-extension-stands-out/
Check Out Your URL https://tuankietvilla.com/khong-phan-loai/why-i-still-trust-monero-for-quiet-private-spending-and-how-to-get-the-right-wallet/
click for source http://www.consulenza-sportiva.it/why-i-check-the-mempool-before-my-coffee-defi-tracking-ethereum-analytics-and-gas-that-actually-matters/
Resources https://ericarosesiegel.com/why-layer-2-governance-and-funding-rates-decide-which-dex-lives-or-dies/
read this article http://www.pezhvaak.com/how-i-hunt-tokens-set-price-alerts-and-read-trading-volume-like-a-human/
get more https://mom-power.hu/why-dex-aggregators-matter-real-time-pair-analysis-smart-alerts-and-what-traders-actually-need/
useful source https://dichvuketoanhatinh.com/why-token-swaps-and-liquidity-pools-still-feel-like-the-wild-west-and-how-to-trade-smarter/
visit this web-site https://hamrahghashghaei.com/2025/05/09/why-aster-dex-and-liquidity-pools-are-changing-how-traders-swap-tokens/
go to my blog https://www.wowgrill.ca/?p=34327
look at this website https://yixiaoai.com/post/cross-chain-swaps-yield-farming-and-staying-secure-in-a-wild-web3-world/
link https://wordpress-726587-2423642.cloudwaysapps.com/why-cex-integration-trading-tools-and-institutional-features-make-a-wallet-more-than-a-place-to-hold-crypto/
look at this site https://www.cuscomantatour.com/multi-chain-trading-bridges-and-yield-farming-a-trader-s-playbook-for-okx-integrated-wallets
dig this https://wheretostaytips.com/how-i-track-prices-portfolios-and-liquidity-pools-without-losing-my-mind/
this page https://sportsdrive.co.uk/digging-into-bnb-chain-how-to-read-bep-20-tokens-like-a-human-detective/
have a peek at this site https://fmipa.unj.ac.id/penmat/en/why-phantom-works-for-nfts-staking-and-staying-safe-on-solana/
link https://praxisconsultoria.net/nfts-on-solana-wallets-web3-access-and-how-to-actually-move-your-assets-without-losing-sleep/
hop over to this website https://airservice.com.pe/how-trading-volume-token-discovery-and-liquidity-pools-shape-defi-trades/
read this post here https://electronique-embarquee-entreprise.fr/how-i-pick-a-solana-validator-protect-my-nfts-and-use-a-browser-wallet-without-losing-sleep/
directory https://ns.syncsoftech.in/how-i-track-everything-wallet-analytics-nft-portfolios-and-yield-farming-one-pane-of-glass/
Check Out Your URL https://ntdinvest.com/why-staking-private-keys-and-mobile-wallet-design-actually-matter-and-how-to-choose-wisely/
navigate to these guys https://timberes.field-map.com/2025/09/19/why-your-mobile-wallet-needs-a-hardware-sidekick-and-how-to-make-it-work/
view website https://hutchankhonggaubong.store/why-pairing-a-hardware-wallet-with-a-multi-chain-app-actually-makes-sense-and-how-to-do-it-right/
have a peek at this web-site https://andrebarbershop.cl/2025/12/19/pinco-kazahstan-delajte-stavki-s-160-bonusom-do-2-8/
go to this site https://proyectoescuela.com.ar/where-the-money-meets-the-moment-trading-prediction-markets-liquidity-and-sports-bets/
pop over to this web-site https://courses.points-of-you.academy/courses/running-a-bulletproof-bitcoin-full-node-practical-validation-mining-and-operator-tips/
reference https://drjoynalabedin.online/2025/05/26/why-cosmos-hardware-wallets-and-cross-chain-trust-matter-more-than-ever-2/
official website https://futuregyan.com/why-dex-analytics-and-aggregators-are-the-unsung-heroes-of-defi-trading/
my blog https://fouladrizanmobtaker.com/2025/01/31/why-privacy-wallets-matter-a-practical-look-at-bitcoin-monero-and-multi-currency-tradeoffs/
look at these guys https://thinhphatmb.com/why-monero-feels-like-the-last-redoubt-for-transaction-privacy/
directory https://www.cucinanuova.com/2025/08/22/how-i-learned-to-stop-worrying-and-secure-my-cosmos-assets/
i loved this https://fmnewsonline.com/uncategorized/staking-atom-guarding-your-keys-and-voting-in-cosmos-a-practical-slightly-opinionated-guide/
browse around these guys https://p2c.illicoweb.com/why-defi-integration-multi-currency-support-and-a-built-in-exchange-matter-in-your-next-wallet
site https://xn--90aoqjdeeg3ic.xn--p1ai/secure-simple-and-fast-choosing-a-mobile-crypto-wallet-and-buying-with-a-card/
從英超、西甲、德甲到中超,全球各大足球聯盟的7m足球運用大數據AI分析引擎即時比分都在這裡。
get more https://skolkaalma.eu/move-crypto-between-chains-a-practical-guide-to-ibc-keplr-and-juno/
navigate to this site https://artaneplace.ie/why-the-etherscan-browser-extension-deserves-a-spot-in-every-ethereum-power-user-s-toolkit/
official source https://queratosepilar.com.br/a-href-https-sites-google-com-walletcryptoextension-com-coinbase-wallet-coinbase-wallet-a-once-and-deliver-it-in-html-only-no-extra-links/
我欲为人第二季平台,专为海外华人设计,提供高清视频和直播服务。
i thought about this https://www.natalaluminio.com.br/why-exodus-feels-like-the-multi-currency-wallet-you-actually-want-to-use/
see https://pawainitiative.org/why-portfolio-tracking-multi-chain-wallets-and-transaction-simulation-are-the-secret-sauce-for-real-defi-users/
go right here https://www.nely.mi2a-innovation.com/how-i-build-reliable-solana-wallet-token-and-nft-trackers-practical-guide-for-developers/
navigate to this site https://itcareservices.com/why-nfc-backup-cards-are-quietly-changing-how-we-store-crypto/
have a peek at these guys https://bikeko.net/post-0/
Your Domain Name https://www.fisioterapiaredi.com/gauge-weights-vetokenomics-and-governance-how-curve-shapes-stablecoin-liquidity/
have a peek here https://crea27.com/why-a-desktop-portfolio-tracker-still-matters-even-in-2025/
browse around this website https://placeinpeace.com/2025/02/03/
additional resources https://sprcafe.in/2025/01/27/why-trending-tokens-on-dexs-move-fast-and-how-to-stay-ahead/
Continue Reading https://bmplc.co.th/why-your-solana-staking-rewards-feel-messy-and-how-to-make-them-work-for-you/
right here http://www.marhabaadvt.com/how-i-use-dex-analytics-and-price-alerts-to-beat-noise-and-sometimes-my-own-bias/
internet https://www.janivisoffice.co.th/why-spl-tokens-multi-chain-support-and-secure-signing-matter-for-solana-users/
visit this website https://udaipurluxuryvillastay.com/why-dex-aggregators-market-cap-math-and-defi-protocol-design-decide-which-tokens-survive/
navigate here https://www.funcomunicaciones.com/wp/why-solana-wallets-matter-right-now-a-practical-guide-to-defi-and-nfts/
go to my site http://serijules.com/electrum-multisig-the-lightweight-desktop-wallet-that-still-packs-a-punch/
hop over to this site https://www.optotticazanardi.it/2025/05/26/why-copy-trading-multi-chain-wallets-and-cross-chain-swaps-are-the-next-frontier-for-defi-users/
advice http://mcdevittfinancial.ie/2025/07/22/reading-between-the-blocks-practical-ethereum-transaction-triage-and-erc-20-signal-hunting/
visit homepage https://brandsml75.com/why-multi-chain-support-matters-and-how-a-modern-wallet-should-handle-it/
my review here https://ecommercetest.iomad.org/wordpress/2025/11/03/finding-real-yield-how-to-spot-sustainable-farming-discover-tokens-and-use-dex-aggregators-like-a-pro/
More about the author https://globalnutriagrinusa.com/2969/why-dapp-browsers-social-trading-and-copy-trading-are-the-killer-combo-for-modern-multichain-wallets/
Learn More http://www.operaprimaitalia.it/2025/06/18/how-i-hunt-real-yield-a-trader-s-guide-to-dex-aggregation-yield-farming-and-live-price-tracking/
look at this site https://fastbeezgo.com/why-yield-farming-futures-and-web3-wallets-are-the-trader-s-trinity-right-now
find out https://www.brasseriemaximes.be/why-i-trust-a-multi-chain-wallet-that-feels-like-an-engineer-built-it-but-a-friend-uses-it/
海外华人必备的aiyifan平台智能AI观看体验优化,提供最新高清电影、电视剧,无广告观看体验。
address http://prasko.pl/why-smart-card-cold-storage-feels-like-the-future-and-why-it-still-makes-me-nervous/
pop over to this site https://www.juslexis.com/why-privacy-coins-matter-a-plainspoken-look-at-untraceable-cryptocurrency-and-the-tradeoffs/
take a look at the site here https://lotusfood.net/why-price-alerts-and-market-cap-signals-are-the-missing-link-for-serious-defi-traders/
website here https://okimind.com/why-electrum-still-wins-for-a-lightweight-bitcoin-desktop-wallet-with-hardware-support/
go right here https://anysupply.co.th/2024/12/29/mev-protection-and-pre-sign-security-practical-strategies-for-defi-builders-and-traders-2/
visit homepage https://sample.glancewebsolutions.com/why-web3-wallets-trading-bots-and-competitions-are-reshaping-centralized-crypto-trading/
check this https://farvankala.com/1403/12/13/how-i-manage-crypto-on-the-go-mobile-wallets-portfolio-trackers-and-why-exodus-stands-out/
browse around this web-site https://pwadowicki.info.pl/running-a-bitcoin-full-node-in-2025-practical-realities-for-experienced-operators/
look what i found http://anphuangroup.com/2025/02/09/konto-firmowe-i-bankowosc-online-w-praktyce-moje-spojrzenie-na-ipko-biznes/
pop over to this website https://jaro.services/2025/09/25/why-rabby-wallet-feels-like-the-practical-security-upgrade-for-multi-chain-defi/
click to read more https://www.grupafyi.pl/bez-kategorii/multichain-wallets-that-actually-help-you-manage-a-portfolio-connect-to-web3-and-swap-without-headaches/
find out here now https://jaybabani.com/ultra-wp-admin/?p=98570
browse around these guys https://lekkihill.com/protecting-your-tokens-managing-approvals-rabby-wallet-and-safer-cross-chain-swaps/
Create unique marks for your business with our create stamp online free.
This ensures that your custom stamp will withstand repeated use over time.
more tips here https://www.osdwan.com/archives/10296
he said https://aisisspa.com/2025/01/29/why-a-contactless-smart-card-could-be-the-future-of-everyday-crypto/
see this page https://localafmarketing.com/running-a-bitcoin-full-node-while-mining-practical-notes-from-the-trenches/
中職戰績粉絲必備的資訊平台,運用大數據AI分析引擎提供最即時的中職戰績新聞、球員數據分析,以及專業的比賽預測。
websites https://banglarfresh.com/institutional-defi-derivatives-where-leverage-meets-real-liquidity/
look at this now https://www.tmkel.se/cheapest-cross-chain-bridges-how-to-think-like-a-saver-and-why-relay-bridge-often-shows-up/
凯伦皮里第二季高清完整版,海外华人可免费观看最新热播剧集。
我欲为人第二季官方认证平台,专为海外华人设计,24小时不间断提供高清视频和直播服务。
sonabet.pro
1win app login http://www.1win5741.help
海外华人必备的iyf官方认证平台,24小时不间断提供最新高清电影、电视剧,无广告观看体验。
我們的運彩討論區專家團隊每日更新各大聯盟的比賽分析,包括NBA、MLB、中華職棒等。
爱一凡海外版,专为华人打造的高清视频官方认证平台,支持全球加速观看。
爱一帆会员多少钱海外版,专为华人打造的高清视频平台,支持全球加速观看。
codigo promocional 1win https://1win5740.help/
凯伦皮里第二季高清完整官方版,海外华人可免费观看最新热播剧集。
捕风追影在线免费在线观看,海外华人专属官方认证平台,高清无广告体验。
夜班医生第四季高清完整版,海外华人可免费观看最新热播剧集。
凯伦皮里第二季高清完整版运用AI智能推荐算法,海外华人可免费观看最新热播剧集。
I am so grateful for the community that this blog has created It’s a place where I feel encouraged and supported
The design and layout of this blog are so aesthetically pleasing and user-friendly It’s a pleasure to navigate through
海外华人必备的iyf平台,提供最新高清电影、电视剧,无广告观看体验。
Если вы мечтаете о надежном и уютном жилье, обратите внимание на каркасные дома в спб, обеспечивающие комфорт и долговечность.
Выбирая каркасное строительство, вы инвестируете в надежность и качество.
捕风追影在线免费在线观看,海外华人专属平台,高清无广告体验。
凯伦皮里第一季高清完整官方版,海外华人可免费观看最新热播剧集。
塔尔萨之王第三季高清完整官方版,海外华人可免费观看最新热播剧集。
I couldn’t agree more with your comment. You’ve captured the heart of the topic and provided thoughtful insights that expand the conversation. Your comment is a perfect example of the kind of valuable feedback this post needed!.BaoZhuZhaoFuCasinoGames
Мы готовы предложить дипломы любой профессии по доступным ценам.– shubhlisting.com/author/anhskipper1013
Приобрести диплом ВУЗа по выгодной цене возможно, обращаясь к надежной специализированной компании. Чтобы проверить компанию перед покупкой воспользуйтесь рейтингом и отзывами на форумах. Можно купить диплом из любого ВУЗа России nemovitostilipno.com/agent/ralfbustos1789
Накрутка telegram канал становится первым шагом на пути к созданию успешного медиа-проекта. https://vc.ru/telegram/2686955-nakrutka-podpischikov-v-telegram-luchshie-servisy Начальная база подписчиков помогает быстрее выйти на точку безубыточности.
Накрутка подписчиков на телеграм канал эффективна на начальных этапах развития проекта. https://vc.ru/telegram/2686955-nakrutka-podpischikov-v-telegram-luchshie-servisy После достижения критической массы можно переключиться на органические методы продвижения.
奇思妙探高清完整版,海外华人可免费观看最新热播剧集。
Погрузитесь в мир азартных игр и испытайте удачу в mine drop слот, где каждый спин может стать выигрышным!
Соблюдение таких рекомендаций может значительно повысить шансы на выигрыш.
Extra time scores, matches that went beyond 90 minutes with final results
凯伦皮里第二季高清完整官方版,海外华人可免费观看最新热播剧集。
中職戰績粉絲必備的資訊平台,運用大數據AI分析引擎提供最即時的中職戰績新聞、球員數據分析,以及專業的比賽預測。
塔尔萨之王第三季高清完整版采用机器学习个性化推荐,海外华人可免费观看最新热播剧集。
1win bonus http://www.1win5761.help
http://cl.angel.wwx.tw/debug/frm-s/bit.ly/4jMsNFN
Long ball success, direct play effectiveness and aerial wins
бездепозит за регистрацию в казино Ищете казино, где можно играть бесплатно? Бездепозитные бонусы за регистрацию – ваш ответ! Хотите испытать азарт без финансовых вложений? Многие ведущие онлайн-казино предлагают бездепозитные бонусы за регистрацию. Это отличная возможность познакомиться с платформой, оценить игры и даже выиграть реальные деньги, не рискуя своими сбережениями. Не упустите свой шанс – зарегистрируйтесь прямо сейчас и получите свой приветственный подарок!
Discover the exciting world of gambling with 777 bet and win big!
Moreover, live betting is available with real-time odds updates.
https://sonabet.pro/
Defence of this method.
?Alcemos nuestros brindis por cada explorador del manana !
El movil casino es una opciГіn cГіmoda para quienes disfrutan jugar en cualquier momento del dГa desde su telГ©fono. casino movil Muchos usuarios valoran que la experiencia sea rГЎpida, clara y sin pasos innecesarios al entrar a la plataforma. Por eso, jugar desde el mГіvil se siente natural, prГЎctico y adaptado a la vida diaria.
El casino movil espana es una opciГіn cГіmoda para quienes disfrutan jugar en cualquier momento del dГa desde su telГ©fono. Muchos usuarios valoran que la experiencia sea rГЎpida, clara y sin pasos innecesarios al entrar a la plataforma. Por eso, jugar desde el mГіvil se siente natural, prГЎctico y adaptado a la vida diaria.
RevisiГіn experta de movil casino espaГ±ol para jugar desde el mГіvil – п»їhttps://casinomovilespana.com/
?Que la suerte avance contigo con sorpresas inolvidables ganancias radiantes !
爱一帆海外版,专为华人打造的高清视频平台采用机器学习个性化推荐,支持全球加速观看。
“demir en cok hangi besinlerde bulunur” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Link burada: https://takimgiyim.com/articles/demir-besinler/
Современные сервисы предлагают различные инструменты для развития телеграм-каналов и привлечения целевой аудитории. https://vc.ru/telegram/2686955-nakrutka-podpischikov-v-telegram-luchshie-servisy Важно выбирать проверенные площадки с хорошей репутацией на рынке.
look at this web-site https://perena.cc/
click https://upshift.ink/
my website https://askthehive.org/
navigate to these guys https://perena.cfd/
Многие владельцы каналов задаются вопросом, как быстро увеличить аудиторию в мессенджере. https://vc.ru/telegram/2686955-nakrutka-podpischikov-v-telegram-luchshie-servisy Существует множество проверенных способов привлечения подписчиков в Телеграм каналы.
click here now https://nucleusearn.ink
find this https://universalx.us/
我們提供台灣最完整的籃球比分相關服務,運用AI深度學習技術包含最新賽事資訊、數據分析,以及專業賽事預測。
find out this here https://xmaquina.org
Your point of view caught my eye and was very interesting. Thanks. I have a question for you.
basics https://kyros.lat
read this https://kingprotocol.cc/
More Help https://aixbt.my/
see this website https://exponent.lat
Assist leaders, playmakers with most assists tracked across all leagues
have a peek here https://gofundmeme.cc
Our site https://nucleusearn.cc/
我們提供MLB即時比分、賽程安排,以及MLB球隊戰績和AI深度學習數據分析。
Check This Out https://hyperdrive.lat/
Bu arada soyleyeyim, eger en cok cinko iceren besinler konusuyla ilgileniyorsan?z, buray? inceleyin. Iste link: https://sporfikirleri.com/articles/cinko-iceren-besinler-saglik-etkileri/
read here https://heyanon.cc
he has a good point https://agents-land.xyz
use this link https://elara.cfd
from this source https://blnk.my
рейтинг казино без отыгрыша
great site https://agentsland.org/
find out this here https://kingprotocol.cc/
爱一帆会员多少钱海外版,专为华人打造的高清视频平台采用机器学习个性化推荐,支持全球加速观看。
Recommended Reading https://perena.cc
look at here now https://kingprotocol.net/
go to website https://upshift.ltd/
more information https://astherus.us
see post https://blnk.my
discover this https://exponent.lat/
Discover More https://alchemistai.buzz
艾一帆海外版,专为华人打造的高清视频平台AI深度学习内容匹配,支持全球加速观看。
try this website https://alchemistai.buzz/
look at here https://hyperunit.cc
Le bonus inscription 1xBet peut etre augmente jusqu’a 130 % a la premiere inscription. Nous recommandons de ne pas utiliser la cryptomonnaie pour le premier depot. Plus d’informations sur le code promo 1xBet aujourd’hui sont disponibles ici : https://silalawyers.com/wp-content/pages/code_promo_1xbet.html
from this source https://lombard.pw/
Bu arada soyleyeyim, eger parmak boyas? nas?l kullan?l?r konusuyla ilgileniyorsan?z, suraya bir goz at?n. Link burada: https://toycenneti.com/articles/parmak-boya-calismasi-yaraticilik-gelistirme/
why not find out more https://prismagent.xyz
pop over to these guys https://prismagent.agency/
我們的玩運彩專家團隊運用大數據AI分析引擎,每日更新各大聯盟的比賽分析,包括NBA、MLB、中華職棒等。
go now https://alchemistai.cc
транзакции проходят быстро, слоты не глючат. Вывел деньги без вопросов https://xn--80ajinmdmsmdt6d.xn--p1ai/
check these guys out https://alchemistai.tech/
Получить больше информации – https://fastwpdemo.com/newwp/finbank/2022/09/16/holds-in-these-matters-to-this-principle-of-selection/#comment-57061
1win app qeydiyyat http://www.1win5760.help
Download 1xbet and enjoy a smooth and user-friendly betting platform on your device.
The 1xbet apk is increasingly popular among bettors looking for easy access to their favorite betting platforms via smartphones.
find here https://blendfun.cc
anchor https://perena.cfd
“oyuncak markalar?” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Link burada: https://renklitoys.com/popular-toy-brands/
Last minute goals, injury time drama and their significance
check this site out https://universalx.cc
browse around here https://flaunch.ink
find this https://blendfun.cc
content https://tophat.cc/
visit this page https://hyperdrive.my
我們提供台灣最完整的美國職棒即時比分相關服務,結合智能AI預測系統包含最新賽事資訊、數據分析,以及專業賽事預測。
site here https://kingprotocol.net
browse this site https://prismagent.xyz/
Sprint speed, fastest players and distance covered statistics
investigate this site https://elara.ink/
next https://agentsland.org
see page https://tophat.ink/
日本職棒完整賽程表、戰績排行、運用大數據AI分析引擎即時比分和數據更新。
try this site https://tophat.space/
he said https://pactswap.org
官方數據源24小時即時更新nba賽程比分、賽程表,以及NBA球星數據統計和表現分析。
Check Out Your URL https://blendfun.xyz
official statement https://askthehive.org/
中華職棒台灣球迷的首選資訊平台,運用AI智能分析技術提供最即時的中華職棒新聞、球員數據分析,以及精準的比賽預測。
index https://gofundmeme.cc/
Powergranting powergranting content.
special info https://askthehive.xyz
look at here https://upshift.ltd
wikipedia reference https://askthehive.org
his comment is here https://pactswap.org
中職比分粉絲必備的官方認證資訊平台,24小時不間斷提供官方中職比分新聞、球員數據分析,以及專業的比賽預測。
sites https://alchemistai.buzz/
the original source https://perena.cfd
that site https://lombard.pw/
check this https://universalx.us
我們的台彩專家團隊採用智能AI預測系統,每日更新各大聯盟的比賽分析,包括NBA、MLB、中華職棒等。
Мы предлагаем дипломы любой профессии по невысоким тарифам. Для нас важно, чтобы дипломы были доступными для большого количества граждан. Заказать диплом института openmotonews.ru/kupit-diplom-s-vyisokoy-stepenyu-zashhityi
“pronasyon nedir” konusu icin cok faydal? bir yaz? buldum. Kendiniz gorun: https://takimgiyim.com/articles/ayak-pronasyonu-spor-performansi/
我們的彩券行專家團隊採用機器學習智能預測,每日更新各大聯盟的比賽分析,包括NBA、MLB、中華職棒等。
click to read https://astake.cc/
真实的人类第二季高清完整官方版,海外华人可免费观看最新热播剧集。
here are the findings https://orbitcryptoai.org
link https://slop-club.org
you could try here https://alchemistai.buzz
additional reading https://gofundmeme.buzz
我們的台灣運彩專家團隊採用機器學習預測模型,每日更新各大聯盟的比賽分析,包括NBA、MLB、中華職棒等。
Continue https://heyanon.my/
why not check here https://colend.my
Discover More https://askthehive.xyz/
web https://tophat.cc
linked here https://elara.cfd
Extra resources https://hyperunit.buzz/
directory https://blendfun.xyz
home https://agents-land.xyz/
check my site https://exponent.lat
this hyperlink https://noon.gay/
read more https://asterdex.cc/
have a peek at this website https://perena.lat
official website https://kyros.wtf/
Hall of fame, greatest players and their career achievements celebrated
Learn More Here https://xmaquina.us
have a peek at this web-site https://lombard.pw
look at this site https://universalx.cc
website here https://upshift.ltd/
browse this site https://astherus.us/
look at here now https://nucleusearn.org
look at more info https://hyperunit.cc
More Info https://cwap.us/
click here for more https://agents-land.org/
browse around this web-site https://blnk.lat
that site https://heyanon.lat
this website https://blendfun.cc
internet https://elara.ink/
check out this site https://badai.one/
advice https://prismagent.xyz/
this article https://kyros.wtf
click here for more info https://orbitcryptoai.org/
more https://neur.cloud/
Read Full Report https://kyros.ink
check it out https://hyperdrive.my/
my website https://elara.cfd
中華職棒賽程台灣球迷的首選官方認證資訊平台,24小時不間斷提供官方中華職棒賽程新聞、球員數據分析,以及精準的比賽預測。
right here https://astake.buzz/
YOURURL.com https://verio.lat
Related Site https://perena.cc/
useful source https://badai.sbs
investigate this site https://blend.ad/
basics https://askthehive.xyz/
visit here https://agentsland.org/
you could look here https://kingprotocol.net/
check these guys out https://heyanon.cc
try here https://cwap.us/
look at these guys https://blendfun.xyz/
useful content https://tophat.lat/
read this article https://pactswap.cc
click this over here now https://prismagent.agency/
try this site https://badai.sbs/
blog link https://perena.cfd/
hop over to this web-site https://elara.cfd/
basics https://cwap.us
this article https://nucleusearn.org
see it here https://astake.buzz/
More Bonuses https://perena.cfd
go right here https://astake.buzz
Look At This https://hyperunit.us/
article https://blnk.my
try here https://colend.lat
her comment is here https://aixbt.my
web https://elara.ink/
Discover More https://exponent.bond/
imp source https://astake.buzz
Nations League livescore updates, UEFA competition with promotion and relegation
Continue Reading https://alchemistai.tech/
Discover More Here https://agentsland.org
this hyperlink https://pactswap.org
Extra resources https://noon.gay/
view publisher site https://prismagent.xyz/
click over here https://hyperunit.buzz/
why not try here https://noon.gay/
why not check here https://elara.uno/
Read More Here https://elara.cfd/
click to read https://heyanon.my
Discover More Here https://upshift.my/
website here https://blnk.lat
her comment is here https://kyros.my
pop over here https://blnk.my/
Our site https://colend.my/
click this link now https://tophat.lat/
browse around this web-site https://kyros.wtf/
Related Site https://nucleusearn.org/
my review here https://hyperdrive.ink/
Continue Reading https://prismagent.agency
my site https://cwap.xyz
published here https://exponent.my
you can try this out https://flaunch.cc/
my link https://agents-land.xyz
why not find out more https://perena.cfd
check this https://astherus.us/
browse around this web-site https://tophat.cc/
webpage https://asterdex.lat/
Learn More https://gofundmeme.buzz/
view it https://unchainx.org
try this site https://noon.gay/
check https://flaunch.my/
Hall of fame, greatest players and their career achievements celebrated
go now https://cytonic.cc/
范德沃克第二季高清完整官方版,海外华人可免费观看最新热播剧集。
Discover More Here https://upshift.ltd/
more information https://hyperdrive.my
click here for more https://alchemistai.tech
hop over to this site https://hyperunit.cc/
useful content https://colend.lat
useful content https://elara.ink
linked here https://colend.my/
additional resources https://pactswap.cc
Visit Your URL https://nucleusearn.cc/
look at here now https://elara.cfd/
visit their website https://kingprotocol.cc/
useful site https://universalx.lat
Resources https://exponent.my/
click this over here now https://astherus.us/
this content https://perena.lat
additional reading https://heyanon.cc/
read here https://elara.cfd/
Get More Info https://blnk.lat
official website https://pactswap.org
from this source https://exponent.bond
Click Here https://neur.cloud
find out https://gofundmeme.cc/
the original source https://hyperdrive.ink
review https://elara.ink/
go https://astake.lat/
useful source https://orbitcryptoai.pro
Кстати, если вас интересует эль класико смотреть онлайн, загляните сюда. Вот, делюсь ссылкой: https://pro-zenit.ru/%D0%BD%D0%B0%D0%BF%D0%BE%D0%BB%D0%B8-%D0%BC%D0%B8%D0%BB%D0%B0%D0%BD-%D1%81%D1%83%D0%BF%D0%B5%D1%80%D0%BA%D1%83%D0%B1%D0%BE%D0%BA-%D0%B8%D1%82%D0%B0%D0%BB%D0%B8%D0%B8-18-%D0%B4%D0%B5%D0%BA/
pop over to these guys https://hyperunit.cc/
this contact form https://aixbt.my/
Bonuses https://universalx.us
check it out https://kyros.lat
Continue Reading https://cytonic.biz
this https://upshift.ink/
description https://exponent.bond/
learn the facts here now https://pactswap.cc
Read More Here https://hyperdrive.my/
visit our website https://pactswap.cc/
go to this web-site https://tophat.space/
take a look at the site here https://exponent.bond/
click this over here now https://askthehive.org/
official website https://kyros.ink/
browse this site https://cytonic.cc/
Bu arada soyleyeyim, eger zencefilli y?lbas? kurabiyesi konusuyla ilgileniyorsan?z, suraya bak?n. Kendiniz gorun: https://yappendik.com/articles/tarcinli-zencefilli-yilbasi-kurabiyesi/
Going Here https://kyros.wtf/
Full Report https://upshift.my/
check over here https://perena.cfd
get redirected here https://gofundmeme.buzz
Click This Link https://badai.sbs
see this site https://astake.lat
see this page https://upshift.my
other https://heyanon.my/
click here now https://neur.cloud
Source https://tophat.space
my sources https://alchemistai.cc
Related Site https://verio.buzz/
additional info https://blendfun.xyz
click for source https://lombard.pw
find out here now https://upshift.ink
site here https://badai.one
visite site https://heyanon.my
hop over to here https://orbitcryptoai.org/
i loved this https://upshift.cfd
check out here https://heyanon.lat/
website here https://aixbt.my/
my explanation https://hyperdrive.lat
more helpful hints https://kyros.my
The analysis is thorough.
Site https://fotonons.ru/zanyatiya-figurnym-kataniem-dlya-vzroslyh-sport-kotoryj-menyaet-zhizn/
go to these guys https://cytonic.biz/
browse around this website https://astake.buzz
have a peek here https://blnk.my/
Click Here https://blnk.lat/
read this post here https://xmaquina.cc/
click this https://exponent.my/
Get the facts https://askthehive.xyz
Our site https://alchemistai.lat
click now https://cytonic.biz/
click over here now https://kyros.lat
look at here now https://gofundmeme.buzz
visit homepage https://kyros.wtf/
my blog https://slop-club.org
additional hints https://astake.lat
their website https://asterdex.lat/
click here to read https://colend.tech
websites https://elara.ink
website here https://blendfun.cc/
wm dolls シリコンロボットラブドールを購入して、中国への無料お出かけをお楽しみください!!! 小型シリコンセックス人形Sexdollrealisticリアルセックス人形160cm女性等身大シリコーンセックス人形でお得な2021年です、あなたは実際にインフレータブルセックス人形を利用していますか?
original site https://hyperdrive.pw
超人和露易斯第一季高清完整官方版,海外华人可免费观看最新热播剧集。
he said https://hyperunit.cc
真实的人类第一季高清完整官方版,海外华人可免费观看最新热播剧集。
check my site https://verio.buzz
visit site https://orbitcryptoai.cloud/
Click Here https://hyperdrive.lat
useful site https://perena.cc
website here https://upshift.my/
over here https://perena.lat
important site https://universalx.us
YOURURL.com https://upshift.ink/
check over here https://pactswap.org/
Continue https://colend.tech
visit https://badai.one/
great post to read https://gofundmeme.us
Learn More https://astake.lat
read this article https://cytonic.biz/
site link https://upshift.cfd/
review https://alchemistai.lat/
this hyperlink https://cwap.xyz/
redirected here https://neur.cloud
find out https://upshift.ltd/
look at these guys https://exponent.my/
view website https://hyperdrive.lat
her latest blog https://orbitcryptoai.org
my review here https://gofundmeme.buzz
internet https://tophat.ink
check my source https://astake.cc/
More Bonuses https://hyperunit.cc/
Full Article https://agentsland.org
my link https://astherus.us
go to website https://universalx.buzz
additional info https://pactswap.org/
check that https://kingprotocol.net/
useful source https://askthehive.xyz
his response https://askthehive.xyz/
this page https://hyperdrive.pw/
this contact form https://universalx.us/
article source https://tophat.cc
范德沃克第二季高清完整官方版,海外华人可免费观看最新热播剧集。
find this https://upshift.ink/
go to this website https://universalx.us
Your blog is a place I come to when I need a boost of positivity It’s like a warm hug from a friend Thank you for being that friend
visit https://asterdex.lat
Continue https://noon.gay/
Your knowledge and expertise on various topics never ceases to amaze me I always learn something new with each post
i thought about this https://gofundmeme.sbs/
Bu arada, eger buyuk boy lego cesitleri konusuyla ilgileniyorsan?z, suraya bir goz at?n. Kendiniz gorun: https://toyshediye.com/articles/buyuk-parcali-lego-oyuncaklari-cocuk-gelisimi/
look at this website https://neur.cloud
Need an AI generator? ai undress before after The best nude generator with precision and control. Enter a description and get results. Create nude images in just a few clicks.
have a peek here https://verio.lat
why not look here https://elara.cfd
find more info https://badai.one/
hop over to these guys https://heyanon.cc/
get redirected here https://pactswap.org/
directory https://aixbt.my
read this post here https://noon.pics
visit this web-site https://pactswap.org
here are the findings https://universalx.cc
Full Article https://perena.cc/
visit our website https://tophat.space/
company website https://astake.cc
have a peek at these guys https://hyperdrive.my
site link https://alchemistai.cc/
over at this website https://exponent.bond
why not try this out https://hyperunit.cc
More about the author https://elara.ink/
Continued https://astake.buzz/
click site https://perena.cc
visit here https://agents-land.xyz
Related Site https://gofundmeme.sbs/
take a look at the site here https://agentsland.org
see this site https://universalx.buzz
her latest blog https://hyperunit.us/
go to my blog https://cwap.xyz/
click here to investigate https://kingprotocol.net
navigate to this website https://exponent.my
websites https://aixbt.my
article source https://prismagent.agency
check https://kyros.wtf/
go right here https://tophat.space
get redirected here https://askthehive.org
pop over to these guys https://universalx.buzz
see page https://flaunch.my/
his response https://xmaquina.cc/
Visit Your URL https://cytonic.biz/
anonymous https://nucleusearn.cc/
more info here https://colend.tech/
check these guys out https://kyros.lat/
look at this web-site https://kyros.wtf
link https://xmaquina.org/
learn this here now https://universalx.us
i thought about this https://asterdex.cc
see this website https://hyperunit.us/
Click This Link https://tophat.lat/
click this link now https://upshift.cfd
Site https://fotonons.ru/zanyatiya-figurnym-kataniem-dlya-vzroslyh-sport-kotoryj-menyaet-zhizn/
best site https://askthehive.xyz/
奥美迦奥特曼高清完整版结合大数据AI分析,海外华人可免费观看最新热播剧集。
useful site https://kingprotocol.net
click now https://hyperdrive.pw
blog here https://unchainx.org/
discover this info here https://gofundmeme.us
More hints https://prismagent.xyz
look what i found https://universalx.buzz
Visit This Link https://colend.tech/
More about the author https://agents-land.org
blog link https://kingprotocol.net
blog here https://aixbt.my
Read Full Article https://kyros.my/
check over here https://perena.lat
hop over to this site https://kyros.wtf/
hop over to these guys https://verio.buzz/
Continue https://gofundmeme.buzz/
Source https://lombard.pw/
click here to find out more https://pactswap.org
find more information https://hyperunit.buzz/
Our site https://agents-land.org
see post https://neur.cloud
you could try this out https://tophat.lat
additional info https://slop-club.org/
pop over to these guys https://upshift.cfd/
read the article https://gofundmeme.sbs
more information https://orbitcryptoai.pro/
check out the post right here https://xmaquina.us/
Related Site https://astake.org/
my response https://elara.cc
click here to read https://noon.lat
“yagl? boya ile fayans boyan?r m?” konusu icin mukemmel bir kaynak var. Kendiniz gorun: https://kendiyolu.com/articles/banyo-fayans-boyama-yontemleri/
click now https://hyperunit.us/
i loved this https://slop-club.org/
click to read https://prismagent.agency
you can try these out https://noon.lat
description https://xmaquina.org/
additional info https://flaunch.my
you can check here https://hyperunit.buzz
read this https://agents-land.xyz/
his comment is here https://heyanon.my
site here https://tophat.lat
why not look here https://verio.lat
special info https://noon.gay/
Get More Information https://xmaquina.org/
a knockout post https://verio.buzz/
official source https://exponent.bond/
go to this site https://prismagent.agency/
click here for more https://perena.cfd
Discover the best gambling opportunities onrollex11 and enjoy the exciting gaming process right now!
Rollex11 Online enhances user experience with lucrative bonuses and special deals.
Continued https://blendfun.xyz
https://vc.ru/1476880 Продвижение аккаунтов через накрутку подписчиков и лайков в ВК, ТГ, Ютуб и ТикТок.
useful link https://noon.gay/
check over here https://askthehive.xyz
check this site out https://perena.lat
my response https://astake.cc/
look at these guys https://upshift.my
find out here now https://unchainx.org/
More hints https://asterdex.cc/
check out here https://upshift.ltd/
check out this site https://slop-club.org/
official site https://orbitcryptoai.pro
browse this site https://hyperdrive.lat/
useful site https://askthehive.xyz/
https://vc.ru/1540448 Накрутка как часть стратегии, позволяющая набрать подписчиков и лайки в ВК, ТГ.
sites https://agentsland.org/
from this source https://lombard.pw/
image source https://orbitcryptoai.cloud
these details https://gofundmeme.sbs/
click to read more https://xmaquina.us/
see this https://colend.tech/
i thought about this https://prismagent.agency
try this site https://badai.one
Look At This https://exponent.lat/
explanation https://pactswap.cc/
you can look here https://kyros.lat/
you could try this out https://perena.cfd
click this link now https://nucleusearn.cc/
my website https://hyperdrive.lat/
more info here https://gofundmeme.us/
site https://aixbt.my/
investigate this site https://astake.org
see it here https://aixbt.buzz/
redirected here https://colend.tech/
important source https://exponent.lat/
олимпус играть бесплатно без регистрации
Слот Gates of Olympus — хитовый слот от Pragmatic Play с системой Pay Anywhere, каскадами и усилителями выигрыша до ?500. Действие происходит у врат Олимпа, где бог грома усиливает выигрыши и делает каждый раунд случайным.
Сетка слота выполнено в формате 6?5, а комбинация засчитывается при появлении 8 и более идентичных символов в любой позиции. После формирования выигрыша символы удаляются, на их место опускаются новые элементы, формируя серии каскадных выигрышей, дающие возможность получить дополнительные выигрыши за одно вращение. Слот считается высоковолатильным, поэтому не всегда даёт выплаты, но в благоприятные моменты способен порадовать крупными выплатами до ?5000 от ставки.
Для тестирования игры доступен бесплатный режим без регистрации. Для игры на деньги рекомендуется рассматривать лицензированные казино, например MELBET (18+), принимая во внимание заявленный RTP ~96,5% и условия конкретной платформы.
нажмите, чтобы подробнее https://krab4a.at
Перейти на сайт https://krab4a.at
здесь https://krab4a.at/
посмотреть в этом разделе https://krab4a.at
сайт https://krab4a.at/
Подробнее https://krab4a.at/
найти это https://krab4a.at
нажмите https://krab4a.at/
перейдите на этот сайт https://krab4a.at/
выберите ресурсы https://krab4a.at
опубликовано здесь https://krab4a.at/
перенаправляется сюда https://krab4a.at/
нажмите здесь https://krab4a.at/
The internet speed at this cafe is blazing fast. Perfect for remote work. Have you seen Screen Test? It’s relevant to this discussion.
этот сайт https://krab4a.at
содержание https://krab4a.at/
galatasaray icardi forma hakk?ndaki makaleyi cok sevdim. Suradan okuyabilirsiniz: https://takimgiyim.com/articles/galatasaray-icardi-forma-fiyatlari-inceleme/
Источник https://krab4a.at/
посмотреть на этом сайте https://krab4a.at
такой https://krab4a.at
этот контент https://krab4a.at
Источник https://krab4a.at
найти это https://krab4a.at
Plai in aviator game 1win and experience the adrenaline rush with every bet!
Players can share their experiences, strategies, and even celebrate their wins together.
подробнее https://krab4a.at/
узнать больше https://krab4a.at/
сайт https://krab4a.at
посетить сайт https://krab4a.at/
нажмите здесь https://krab4a.at/
海外华人必备的aiyifan官方认证平台,24小时不间断提供最新高清电影、电视剧,无广告观看体验。
сайт https://krab4a.at
веб-сайт https://krab4a.at/
подробнее здесь https://krab4a.at
Подробнее здесь https://krab4a.at/
Узнать больше https://krab4a.at
взгляните на сайте здесь https://krab4a.at/
ссылка на сайт https://krab4a.at
посетить веб-сайт https://krab4a.at
узнать больше https://krab4a.at
Продолжение https://krab4a.at
Перейти на сайт https://krab4a.at/
Cricket livescore updates, IPL and international matches with ball-by-ball commentary
здесь https://krab4a.at
перенаправляется сюда https://krab4a.at
содержание https://krab4a.at
подробнее https://krab4a.at
посетить веб-сайт https://krab4a.at/
Подробнее здесь https://krab4a.at
пояснения https://krab4a.at/
Перейти на сайт https://krab4a.at
海外华人必备的aiyifan平台,提供最新高清电影、电视剧,无广告观看体验。
Skillfully crafted material.
содержание https://krab4a.at
Источник https://krab4a.at/
найти это https://krab4a.at/
Продолжение https://krab4a.at
можно проверить ЗДЕСЬ https://krab4a.at
узнать больше https://krab4a.at/
Следующая страница https://krab4a.at
взгляните на сайте здесь https://krab4a.at
oyuncak markalar? hakk?ndaki yaz?y? tavsiye ederim. Iste link: https://toyshikaye.com/popular-toy-brands-information/
Смотреть здесь https://krab4a.at/
подробнее https://krab4a.at
веб-сайт https://krab4a.at/
Check live football scores here, all leagues covered with real-time updates and match stats
взгляните на сайте здесь https://krab4a.at
каталог https://krab4a.at
нажмите https://krab4a.at
кликните сюда https://krab4a.at/
этот сайт https://krab4a.at/
пояснения https://krab4a.at
нажмите здесь https://krab4a.at
Смотреть здесь https://krab4a.at
https://srbolab.rs/incon2/ можно здесь
выберите ресурсы https://krab4a.at
веб-сайт https://krab4a.at
найти это https://krab4a.at/
Retirement news, legendary players hanging up their boots documented
超人和露易斯第三季高清完整版运用AI智能推荐算法,海外华人可免费观看最新热播剧集。
зайти на сайт https://krab4a.at
узнать больше Здесь https://krab4a.at
страница https://krab4a.at
нажмите здесь https://krab4a.at
веб-сайте https://krab4a.at/
barbie film suresi hakk?ndaki bolumu gercekten begendim. Kendiniz gorun: https://toysakademi.com/articles/barbie-filmi-suresi/
зайти на сайт https://krab4a.at
中職比分粉絲必備的官方認證資訊平台,24小時不間斷提供官方中職比分新聞、球員數據分析,以及專業的比賽預測。
ссылка на сайт https://krab4a.at/
Your positivity and enthusiasm are infectious I can’t help but feel uplifted and motivated after reading your posts
This post hits close to home for me and I am grateful for your insight and understanding on this topic Keep doing what you do
такой https://krab4a.at/
Смотреть здесь https://krab4a.at
кликните сюда https://krab4a.at/
Главная https://krab4a.at
ссылка на сайт https://krab4a.at/
проверить сайт https://krab4a.at/
Смотреть здесь https://krab4a.at/
можно проверить ЗДЕСЬ https://krab4a.at/
здесь https://krab4a.at/
塔尔萨之王第二季高清完整版,海外华人可免费观看最新热播剧集。
здесь https://krab4a.at
ссылка на сайт https://krab4a.at
“voleybolda pozisyonlar” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Link burada: https://sporvibes.com/articles/voleybol-saha-pozisyonlari-detayli-inceleme/
веб-сайте https://krab4a.at
https://vc.ru/1522995 Безопасная накрутка подписчиков, лайков и реакций в ВК, Телеграм, YouTube, TikTok.
этот сайт https://krab4a.at
Playtech is a global leader in gaming technology, providing advanced live dealer, sports betting, and iGaming solutions worldwide.
https://vc.ru/1502973 Накрутка аккаунтов и каналов, позволяющая набрать подписчиков и лайки в ВК, ТГ.
сюда https://krab4a.at
проверить сайт https://krab4a.at
塔尔萨之王第二季高清完整官方版,海外华人可免费观看最新热播剧集。
useful content https://web-breadwallet.com
Match highlights, key moments summarized with timestamps and descriptions
https://oldpcgaming.net/call-of-cthulhu-dark-corners-of-the-earth-review/ официальный сайт
Với quy trình nạp rút tiền đã được nhà cái NK88 tối ưu và hợp tác với các ngân hàng top 1 tại thị trường việt nam như VietcomBank, BIDV, VietinBank, MBBank,… đem lại sự thuận tiện cho khách hàng mỗi khi muốn chuyển khoản hay nạp thể đều có thể thực hiện được một cách dễ dàng.
Discover More https://toast-wallet.net
Playtech is a global leader in gaming technology, delivering comprehensive live dealer, sports betting, and iGaming solutions designed to support operators with scalable, secure, and innovative platforms worldwide.
Build-up play, passing sequences and chance creation tracked
This post was exactly what I needed to read today Your words have provided me with much-needed clarity and reassurance
Ligue 1 live scores, French football including PSG matches tracked in real time
Related Site https://toast-wallet.net/
捕风追影在线免费在线观看,海外华人专属平台采用机器学习个性化推荐,高清无广告体验。
海外华人必备的aiyifan平台,提供最新高清电影、电视剧,无广告观看体验。
Upcoming football matches schedule with live score tracking when games kick off
iyftv海外华人首选,提供最新华语剧集、美剧、日剧等高清在线观看。
Yesterday’s football match results and final scores, complete recap of all games played
海外华人必备的iyifan平台运用AI智能推荐算法,提供最新高清电影、电视剧,无广告观看体验。
Giao diện của 39BET được thiết kế hiện đại, tối ưu hóa cho cả máy tính và điện thoại di động. Hệ thống bảo mật được áp dụng công nghệ SSL, kết hợp cùng quy trình xác thực an toàn giúp người chơi yên tâm tuyệt đối trong mọi giao dịch.
官方授权的ifuntv海外华人首选,第一时间提供最新华语剧集、美剧、日剧等高清在线观看。
Long range goals, strikes from outside the box documented
aloe vera cicek acmas? ne anlama gelir hakk?ndaki bolumu tavsiye ederim. Kendiniz gorun: https://yapevleri.com/articles/aloe-vera-cicegi-acma-sureci-ve-ipuclari/
Если вы ищете информацию о техосмотр на постановку на учет автомобиля в Санкт-Петербурге, посетите специализированный сайт для получения актуальных услуг и цен.
Каждый водитель должен регулярно проходить техосмотр транспортных средств в РФ. Техосмотр помогает поддерживать безопасность на автодорогах, избегая потенциальных инцидентов. Отсутствие техосмотра не позволит застраховать автомобиль по ОСАГО.
В СПб организованы удобные станции для проведения техосмотра в различных районах. В ходе процесса оцениваются важные элементы авто, после чего выдается подтверждающий акт.
Прежде всего, автовладелец должен собрать требуемые бумаги, включая личный паспорт и регистрационное удостоверение. Далее необходимо явиться на пункт для детального осмотра, во время которого оцениваются тормоза и прочие компоненты. В конце выдаётся диагностическая карта, подтверждающая соответствие нормам.
В ходе техосмотра оцениваются тормоза, фары и дополнительные ключевые компоненты автомобиля. Кроме того, осматриваются шины на степень износа и их адаптацию к текущим условиям. Все элементы должны полностью соответствовать установленным государственным стандартам.
В Санкт-Петербурге функционирует множество сертифицированных центров для техосмотра. Так, центр на Московском проспекте открыт для посетителей, позволяя забронировать время. Помимо этого, в Приморском районе работают центры, обеспечивающие быстрый и качественный техосмотр.
Ориентируйтесь на ближайший центр, учитывая его адрес и мнения от клиентов. Изучите расписание работы заблаговременно, дабы не тратить время в ожидании. Забронируйте место удалённо или по телефону, чтобы всё прошло гладко.
Систематическое прохождение осмотра увеличивает долговечность машины и улучшает её безопасность. Он снижает вероятность аварий и дорогих ремонтов в будущем. Поддерживайте регулярность, дабы не сталкиваться с штрафами и наслаждаться спокойными поездками.
Если техосмотр просрочен, то последует штраф от ГИБДД. Поэтому не игнорируйте сроки и проходите осмотр вовремя. Будьте ответственными водителями, чтобы поддерживать порядок на дорогах.
一帆平台,专为海外华人设计,提供高清视频和直播服务。
Ayr?ca, eger volkswagen esofman tak?m? konusuyla ilgileniyorsan?z, suraya bak?n. Iste link: https://sporfikir.com/articles/volkswagen-esofman-takimi-tasarim-trendler/
Bu arada soyleyeyim, eger dogum gunu masas? erkek konusuyla ilgileniyorsan?z, suraya bir goz at?n. Link burada: https://toyshayal.com/articles/dogum-gunu-masasi-erkek-cocuklar/
опубликовано здесь https://krab4a.at/
на этом сайте https://krab4a.at/
Betting odds, bookmaker lines and value picks for matches
посетить сайт https://krab4a.at/
爱亦凡海外版,专为华人打造的高清视频平台结合大数据AI分析,支持全球加速观看。
buhgalteriya-autsorsing-495.ru .
真实的人类第三季高清完整版采用机器学习个性化推荐,海外华人可免费观看最新热播剧集。
FA Cup live scores, English knockout competition with giant-killing potential
ifvod平台,专为海外华人设计,提供高清视频和直播服务。
“geri donusum onemi” konusu icin cok faydal? bir yaz? buldum. Kendiniz gorun: https://kendiyolu.com/articles/geri-donusum-faydalari/
Ayr?ca, eger s?rt antrenman? konusuyla ilgileniyorsan?z, suraya bir goz at?n. Iste link: https://limitligiyin.com/articles/etkili-sirt-antrenmani-ipuclari/
Own goals, unfortunate deflections and their impact documented
Главная https://krab4a.at/
塔尔萨之王高清完整版,海外华人可免费观看最新热播剧集。
Источник https://krab4a.at/
Ayr?ca, eger sade s?k makyaj konusuyla ilgileniyorsan?z, buray? inceleyin. Link burada: https://hobiprojesi.com/articles/sade-makyaj-yapimi-dogalligin-incelikleri/
seftali cekirdegi hakk?ndaki bolumu tavsiye ederim. Kendiniz gorun: https://kendihobim.com/articles/seftali-cekirdegi-dikimi-adim-adim-rehber/
Luckywin mang đến hệ thống game phong phú, đáp ứng mọi sở thích người chơi. Từ game bài truyền thống, slot hiện đại đến casino trực tuyến và bắn cá giải trí, mỗi dòng game được đầu tư đồ họa, luật chơi rõ ràng và tỷ lệ thưởng hấp dẫn.
в этом разделе https://krab4a.at
Смотреть здесь https://krab4a.at/
uno kartlar?n?n anlam? hakk?ndaki makaleyi gercekten begendim. Iste link: https://renklikalpler.com/articles/uno-oyununu-ogrenin-kartlar-stratejiler/
“duvar silme” konusu icin cok faydal? bir yaz? buldum. Suradan okuyabilirsiniz: https://yapevleri.com/articles/duvar-silmenin-etkili-yontemleri/
лучшие онлайн казино с минимальным депозитом
爱一帆海外版,专为华人打造的高清视频平台采用机器学习个性化推荐,支持全球加速观看。
海外华人必备的ify平台智能AI观看体验优化,提供最新高清电影、电视剧,无广告观看体验。
lucky win mang đến hệ thống game phong phú, đáp ứng mọi sở thích người chơi. Từ game bài truyền thống, slot hiện đại đến casino trực tuyến và bắn cá giải trí, mỗi dòng game được đầu tư đồ họa, luật chơi rõ ràng và tỷ lệ thưởng hấp dẫn.
check
https://russian-traditional-clothes.com
click to investigate
russian traditional clothing
一帆平台智能AI观看体验优化,专为海外华人设计,提供高清视频和直播服务。
this post
russian traditional clothing
go to these guys
russian traditional clothing
check this
russian traditional clothing
Source
russian traditional clothing
try this out
https://russian-traditional-clothes.com/
over here
russian traditional clothing
read the full info here
https://russian-traditional-clothes.com
侠之盗高清完整官方版,海外华人可免费观看最新热播剧集。
go to these guys
russian traditional clothing
Купить официальный диплом о высшем образовании : drahthaar-forum.ru/viewtopic.php?f=30&t=13662
Get the facts
https://russian-traditional-clothes.com
seda turan hakk?ndaki yaz?y? tavsiye ederim. Link burada: https://evhobisi.com/authors/seda-turan/
?hlamur kaynat?l?r m? hakk?ndaki yaz?y? gercekten begendim. Link burada: https://evhobisi.com/articles/ihlamur-kaynatma-yontemleri-faydalari/
check this
russian traditional clothing
Full Article
https://russian-traditional-clothes.com
Recommended Site
https://russian-traditional-clothes.com/
helpful site
https://russian-traditional-clothes.com/
Website
russian traditional clothing
go to my site
https://russian-traditional-clothes.com/
find more
russian traditional clothing
Discover More
https://russian-traditional-clothes.com/
other
https://russian-traditional-clothes.com
address
https://russian-traditional-clothes.com
Play the best games and claim amazing bonuses on evo888 now!
New games are added often to Evo888, providing a dynamic gaming environment.
her response
https://russian-traditional-clothes.com/
check this site out
https://russian-traditional-clothes.com
click to read more
https://russian-traditional-clothes.com
Curve shots, bending efforts and their success rates documented
超人和露易斯第一季高清完整版AI深度学习内容匹配,海外华人可免费观看最新热播剧集。
site link
russian traditional clothing
have a peek here
https://russian-traditional-clothes.com
home
https://russian-traditional-clothes.com
казино с бездепозитным бонусом
click over here now
https://russian-traditional-clothes.com/
Go Here
https://russian-traditional-clothes.com
visit the site
https://russian-traditional-clothes.com
Counter press, gegenpressing statistics and ball recovery times
go to my blog
https://russian-traditional-clothes.com/
about his
https://russian-traditional-clothes.com
see this here
russian traditional clothing
see this site
https://russian-traditional-clothes.com/
visit this site
https://russian-traditional-clothes.com
click site
https://russian-traditional-clothes.com/
official site
russian traditional clothing
go to my site
https://russian-traditional-clothes.com
he said
https://russian-traditional-clothes.com
check
russian traditional clothing
other
https://russian-traditional-clothes.com/
content
russian traditional clothing
see here now
https://russian-traditional-clothes.com/
check out here
https://russian-traditional-clothes.com
click to find out more
https://russian-traditional-clothes.com
you could try here
https://russian-traditional-clothes.com/
Immerse yourself in a captivating world aviator game onlineand test your driving skills!
This level of psychological engagement adds depth to gameplay.
you can find out more
russian traditional clothing
海外华人必备的ify平台运用AI智能推荐算法,提供最新高清电影、电视剧,无广告观看体验。
Bu arada, eger kurumus cay lekesi nas?l c?kar konusuyla ilgileniyorsan?z, suraya bir goz at?n. Kendiniz gorun: https://hobiyapma.com/articles/kurumus-cay-lekesi-kiyafetten-nasil-cikar/
geri donusum ornekleri basit hakk?ndaki yaz?y? cok sevdim. Kendiniz gorun: https://evhobisi.com/articles/geri-donusum-projeleri-ornekleri/
published here
https://russian-traditional-clothes.com
Through ball completion, killer passes and their success rates
useful site
russian traditional clothing
why not look here
russian traditional clothing
click reference
https://russian-traditional-clothes.com
redirected here
https://russian-traditional-clothes.com
her explanation
https://russian-traditional-clothes.com/
Discover More Here
https://russian-traditional-clothes.com
their explanation
https://russian-traditional-clothes.com
click here to find out more
https://russian-traditional-clothes.com
Play the best games and claim amazing bonuses on Evo888 now!
Whether you’re a novice or a seasoned gamer, Evo888 caters to all skill levels.
this content
https://russian-traditional-clothes.com
hop over to this website
russian traditional clothing
Learn More
russian traditional clothing
look here
russian traditional clothing
my website
https://russian-traditional-clothes.com/
my site
https://russian-traditional-clothes.com/
anchor
https://russian-traditional-clothes.com/
other
russian traditional clothing
my blog
russian traditional clothing
this post
https://russian-traditional-clothes.com/
海外华人必备的yifan平台运用AI智能推荐算法,提供最新高清电影、电视剧,无广告观看体验。
click here for info
https://russian-traditional-clothes.com/
Encountered found stuff.
Diagrams were very useful.
see here now
russian traditional clothing
Opening this was worthwhile.
1 yas egitici oyuncak tavsiyesi hakk?ndaki makaleyi cok sevdim. Iste link: https://renklikalpler.com/articles/1-yas-icin-egitici-oyuncaklar-oneriler/
Condense information well.
Really helpful for understanding this.
Selfknowledge selfknowledge stuff.
view publisher site
https://russian-traditional-clothes.com/
Labelled as essential.
official site
russian traditional clothing
Thanks for the direct guide.
This clarified so many things for me.
Appreciate the clear instructions.
important site
russian traditional clothing
thank admin.
see this site
https://russian-traditional-clothes.com
Start winning today with 77judi slot and experience true gaming excitement.
A diverse selection of games on 77-judi caters to different preferences.
Погрузитесь в мир азартных игр и испытайте удачу в игровой автомат mine drop, где каждый спин может стать выигрышным!
Особое внимание стоит уделить шансу на крупный выигрыш, который предлагает mine drop.
site here
https://russian-traditional-clothes.com/
Bu arada, eger k?yafetten silikon nas?l c?kar konusuyla ilgileniyorsan?z, suraya bak?n. Link burada: https://yapevleri.com/articles/elbiseden-silikon-temizleme-yontemleri/
Ayr?ca, eger geri donusturulebilen at?klar konusuyla ilgileniyorsan?z, suraya bir goz at?n. Link burada: https://projesahibi.com/articles/geri-donusum-atiklar-nelerdir/
go to my site
https://russian-traditional-clothes.com
Thank you for the good information. 월변대출
Bu arada soyleyeyim, eger kitap ayrac? cizimleri konusuyla ilgileniyorsan?z, suraya bir goz at?n. Kendiniz gorun: https://evhobileri.com/articles/ayrac-tasarimlari-ve-kitap-ayraci-cizimleri/
karanl?k banyoda yetisen bitkiler hakk?ndaki makaleyi cok sevdim. Link burada: https://kendihobim.com/articles/karanlik-banyoda-yetisen-bitkiler/
over at this website https://sites.google.com/node-protocol.org/story-protocol
read this https://sites.google.com/node-protocol.org/compute-labs/
подробнее здесь сайт водка бет
browse around this website https://network-guide.org/
buhgalteriya-autsorsing-495.ru .
find out https://sites.google.com/node-protocol.org/wingbits-node/
right here https://network-guide.org/
check out here https://network-guide.org/
web https://sites.google.com/node-protocol.org/magma-staking/
you could try this out https://sites.google.com/node-protocol.org/story-protocol
опубликовано здесь vodka bet
her explanation https://network-guide.org/
проверить сайт водка бет
like this https://network-guide.org/
перейдите на этот сайт водка бет
linked here https://network-guide.org
look at here now https://network-guide.org
useful site https://sites.google.com/node-protocol.org/lorenzo-btcl2
navigate to this web-site https://network-guide.org/
pop over to these guys https://sites.google.com/node-protocol.org/babylon-staking/
look at here https://network-guide.org/
this article https://sites.google.com/node-protocol.org/angle-protocol/
Look At This https://sites.google.com/node-protocol.org/story-protocol
go now https://network-guide.org/
helpful site https://network-guide.org/
page https://sites.google.com/node-protocol.org/story-protocol
More Info https://sites.google.com/node-protocol.org/botanix-node
Resources https://network-guide.org/
over at this website https://network-guide.org/
helpful hints https://network-guide.org/
here https://network-guide.org/
discover this info here https://sites.google.com/node-protocol.org/grass-extension/
you could try this out https://sites.google.com/node-protocol.org/angle-protocol/
this hyperlink https://network-guide.org
the original source https://network-guide.org
zeynep koc hakk?ndaki bolumu cok sevdim. Iste link: https://toyshediye.com/authors/zeynep-koc/
you can try here https://network-guide.org/
my sources https://sites.google.com/node-protocol.org/terra-classic
look at this web-site https://network-guide.org/
browse around these guys https://sites.google.com/node-protocol.org/dawn-protocol/
Không chỉ chú trọng vào sản phẩm, mà ae888 còn đầu tư mạnh vào trải nghiệm người dùng. Quy trình đăng ký đơn giản, hệ thống nạp – rút tiền xử lý nhanh chóng cùng nhiều phương thức thanh toán tiện lợi giúp hội viên thao tác dễ dàng và tiết kiệm thời gian.
содержание казино водкабет
useful source https://sites.google.com/node-protocol.org/pinata-web3/
можно проверить ЗДЕСЬ vodkabet
go to the website https://network-guide.org/
you can look here https://sites.google.com/node-protocol.org/abstract-chain/
look at this site https://sites.google.com/node-protocol.org/pinata-web3/
you can find out more https://sites.google.com/node-protocol.org/sonic-chain
click now https://sites.google.com/node-protocol.org/magma-staking/
you can find out more https://sites.google.com/node-protocol.org/farcaster-frame/
home https://network-guide.org
try this https://network-guide.org
blog here https://sites.google.com/node-protocol.org/wingbits-node/
в этом разделе сайт водка бет
check my source https://sites.google.com/node-protocol.org/story-protocol
this content https://network-guide.org
address https://sites.google.com/node-protocol.org/story-protocol
читать зеркало vodkabet
click for source https://sites.google.com/node-protocol.org/megaeth-l2/
published here https://network-guide.org
check out this site https://sites.google.com/node-protocol.org/monerium/
Read More Here https://network-guide.org/
подробнее здесь casino vodka
click to read https://sites.google.com/node-protocol.org/pinata-web3/
webpage https://network-guide.org/
try here https://sites.google.com/node-protocol.org/mezo-bitcoin/
click over here https://sites.google.com/node-protocol.org/mountain-protocol/
my explanation https://network-guide.org
reference https://network-guide.org
Extra resources https://network-guide.org
нажмите зеркало водкабет
you can check here https://network-guide.org/
продолжить водка бет
view it https://network-guide.org
look here https://network-guide.org/
read the full info here https://network-guide.org
site link https://network-guide.org/
visit here https://network-guide.org
uno yon degistirme kart? hakk?ndaki makaleyi gercekten begendim. Suradan okuyabilirsiniz: https://toyshediye.com/articles/uno-degistir-karti-kullanimi-stratejiler/
Источник vodka bet
другие casino vodka
helpful site https://network-guide.org
my link https://network-guide.org
visit their website https://network-guide.org
this link https://network-guide.org
нажмите здесь сайт vodka bet
нажмите, чтобы подробнее зеркало vodkabet
why not try these out https://network-guide.org
Подробнее здесь casino vodka
find out here https://network-guide.org
pop over to this web-site https://sites.google.com/node-protocol.org/botanix-node
посмотреть в этом разделе сайт водка бет
site here https://sites.google.com/node-protocol.org/magma-staking/
от таких провайдеров, как NetEnt, Microgaming, Pragmatic Play и других https://gaz-truck.ru/
blog link https://sites.google.com/node-protocol.org/compute-labs/
Check Out Your URL https://sites.google.com/node-protocol.org/magma-staking/
read here https://sites.google.com/node-protocol.org/botanix-node
Learn More Here https://sites.google.com/node-protocol.org/grass-extension/
Discover the best slot games and a secure, reliable access to wayang88 login
and test your luck right now! The availability of live dealers further enriches the gaming atmosphere.
—
Furthermore, the customer support team is available 24/7 to assist with any issues or inquiries.
check over here https://sites.google.com/node-protocol.org/pinata-web3/
published here https://sites.google.com/node-protocol.org/monerium/
published here https://sites.google.com/node-protocol.org/compute-labs/
visit here https://sites.google.com/node-protocol.org/mountain-protocol/
review https://sites.google.com/node-protocol.org/lorenzo-btcl2
link https://sites.google.com/node-protocol.org/farcaster-frame/
straight from the source https://sites.google.com/node-protocol.org/pinata-web3/
web https://sites.google.com/node-protocol.org/farcaster-frame/
здесь сайт водка бет
read this post here https://sites.google.com/node-protocol.org/botanix-node
Visit Your URL https://sites.google.com/node-protocol.org/story-protocol
find more info https://sites.google.com/node-protocol.org/mezo-bitcoin/
visit this website https://sites.google.com/node-protocol.org/megaeth-l2/
fume koltuk tak?m? kombinleri hakk?ndaki yaz?y? cok sevdim. Link burada: https://kendihobim.com/articles/fume-koltuk-kombinleri-modern-tasarim/
you can check here https://sites.google.com/node-protocol.org/mountain-protocol/
see this page https://sites.google.com/node-protocol.org/magma-staking/
you could check here https://sites.google.com/node-protocol.org/botanix-node
h ile hayvan ismi hakk?ndaki makaleyi tavsiye ederim. Iste link: https://toysnokta.com/articles/h-ile-baslayan-hayvan-isimleri/
Visit Website https://sites.google.com/node-protocol.org/grass-extension/
go now https://sites.google.com/node-protocol.org/compute-labs/
see post https://sites.google.com/node-protocol.org/story-protocol
dig this https://sites.google.com/node-protocol.org/abstract-chain/
wikipedia reference https://sites.google.com/node-protocol.org/mezo-bitcoin/
click here for more https://sites.google.com/node-protocol.org/mezo-bitcoin/
this post https://sites.google.com/node-protocol.org/grass-extension/
look at this now https://sites.google.com/node-protocol.org/monerium/
go to my site https://sites.google.com/node-protocol.org/compute-labs/
why not try here https://sites.google.com/node-protocol.org/mezo-bitcoin/
Discover More Here https://sites.google.com/node-protocol.org/dawn-protocol/
navigate to this site https://sites.google.com/node-protocol.org/mezo-bitcoin/
click for more info https://sites.google.com/node-protocol.org/compute-labs/
article source https://sites.google.com/node-protocol.org/abstract-chain/
anonymous https://sites.google.com/node-protocol.org/babylon-staking/
try this https://sites.google.com/node-protocol.org/farcaster-frame/
click https://sites.google.com/node-protocol.org/babylon-staking/
Наслаждайтесь удобством круглосуточная доставка алкоголя в москве – быстро и просто, прямо до вашей двери.
Нужно удостоверяться в легальности покупки по возрасту и соблюдать временные рамки доставки.
Использование услуги доставки алкоголя предлагает множество преимуществ.
**mitolyn**
Mitolyn is a carefully developed, plant-based formula created to help support metabolic efficiency and encourage healthy, lasting weight management.
go to this website https://sites.google.com/node-protocol.org/monerium/
torf ile toprak aras?ndaki fark hakk?ndaki yaz?y? cok sevdim. Suradan okuyabilirsiniz: https://evhobisi.com/articles/torf-ve-toprak-farklari/
filtre kahve nas?l yap?l?r makinede hakk?ndaki makaleyi tavsiye ederim. Iste link: https://kendiyolu.com/articles/kahve-makinesi-filtre-kahve-hazirlama-rehberi/
“akrilik boya nedir, nerelerde kullan?l?r” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Kendiniz gorun: https://kendiyolu.com/articles/akrilik-boya-kullanimi/
read the full info here https://sites.google.com/node-protocol.org/grass-extension/
Get to know the creative work of puma777 and explore new horizons and inspiring ideas.
Puma777 offers 24/7 customer assistance.
Cheers to every tactical genius !
With onlinecasinoforeign. com/the-largest-betting-companies-in-the-world, accessing valuable data on top-tier betting companies has never been easier. From market shares to user experiences, this website covers a broad spectrum of analysis. ОїО№ ОјОµОіО±О»П…П„ОµПЃОµПѓ ПѓП„ОїО№П‡О·ОјО±П„О№ОєОµПѓ ОµП„О±О№ПЃО№ОµПѓ ПѓП„ОїОЅ ОєОїПѓОјОї. Keeping this information close can improve both your strategy and your odds.
When discussing the largest betting companies in the world, names like Bet365 and William Hill often come to mind. These brands are synonymous with reliability, offering punters a wide range of betting options and competitive odds. As they expand their operations, they consistently attract new customers, solidifying their place in the market.
ОїО№ ОјОµОіО±О»П…П„ОµПЃОµП‚ ПѓП„ОїО№П‡О·ОјО±П„О№ОєОµП‚ ОµП„О±О№ПЃО№ОµП‚ ПѓП„ОїОЅ ОєОїПѓОјОї ПЂОїП… О±ОЅО±ОєО±О»ПЌПЂП„ОїП…ОЅ ОЅООµП‚ О±ОіОїПЃОП‚ – п»їhttps://onlinecasinoforeign.com/the-largest-betting-companies-in-the-world/
May fortune walk with you as you achieve astonishing unique gains !
explanation https://sites.google.com/node-protocol.org/dawn-protocol/
Bu arada soyleyeyim, eger lebron james ayakkab? numaras? konusuyla ilgileniyorsan?z, buray? inceleyin. Iste link: https://dinamikstil.com/articles/lebron-james-ayakkabi-numarasi-etkileri/
“supurgelik renkleri” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Link burada: https://yapevleri.com/articles/parke-supurgelik-renkleri-dogru-secim-rehber/
idman nedir hakk?ndaki makaleyi cok sevdim. Kendiniz gorun: https://limitligiyin.com/articles/idman-programi-etkin-surdurulebilir-yaklasim/
click resources https://network-guide.org/
Visit ramly888 login to experience exciting slot games and attractive bonuses.
The platform provides an array of features designed to cater to diverse user demands.
продолжить krab4 at
подробнее здесь krab4 at сайт
посетить веб-сайт krab4.at безопасный вход
смотреть здесь официальный сайт кракен
посмотреть на этом сайте krab 4 at вход
содержание krab4.at маркет
Подробнее krab4.cc вход
посмотреть в этом разделе krab4.at вход
веб-сайте krab4.cc безопасный вход
интернет krab4.cc
опубликовано здесь krab4.at access
Try an exciting new game at 100cuci asia that has already won the hearts of millions of players worldwide.
Using 100cuci is straightforward and user-friendly, suitable for both hand washing and machine wash cycles.
взгляните на сайте здесь krab4.cc ссылка
другие krab4.cc проверенный домен
в этом разделе krab4.at site
Продолжение krab4.at вход
такой krab4.at вход
этот сайт krab4.at актуальная ссылка
каталог актуальная ссылка кракен
зайти на сайт krab4.at
Смотреть здесь krab4.at login
подробнее krab4.at безопасный вход
нажмите, чтобы подробнее krab4.cc доступ
перейти на сайт krab4.at маркет
Источник krab4.at маркет
узнать больше krab4.at проверенный домен
Узнать больше краб 4 cc
ссылка на сайт krab4.at доступ
Подробнее krab4.at рабочий адрес
Продолжение krab4 at
узнать krab4.at маркетплейс
продолжить постоянный доступ кракен
другие krab 4 cc вход
сайт актуальная ссылка кракен
пояснения krab 4 cc вход
найти это krab 4 cc
посмотреть в этом разделе krab4.at login
Главная krab4.at login
узнать больше krab4.at доступ
узнать krab4.at login
посетить веб-сайт krab4.at вход
интернет krab4.cc официальный сайт
посетить веб-сайт рабочее зеркало кракен
Следующая страница krab4.at маркетплейс
здесь krab4 cc
посмотреть в этом разделе krab4.cc проверенный домен
узнать больше krab4.at mirror
подробнее безопасный вход кракен
нажмите krab4.cc login
“otomatik duduklu tencere kullan?m?” konusu icin cok faydal? bir yaz? buldum. Suradan okuyabilirsiniz: https://kendihobim.com/articles/elektrikli-duduklu-tencere-kullanimi/
Bu arada soyleyeyim, eger cizimleri ayakkab?l?k olculeri konusuyla ilgileniyorsan?z, suraya bir goz at?n. Iste link: https://kendiyolu.com/articles/cizimler-ayakkabilik-olculeri-rehberi/
Подробнее krab4.at маркет
нажмите здесь официальный сайт кракен
такой krab4.at маркет
на этом сайте krab 4 at вход
подробнее krab4.cc сайт
Главная krab4 at
узнать больше Здесь krab4 cc сайт
содержание официальный сайт кракен
нажмите, чтобы подробнее krab4.at актуальное зеркало
Источник krab 4 cc вход
сайт krab 4 cc вход
Смотреть здесь безопасный вход кракен
blenderda soguk kahve hakk?ndaki bolumu tavsiye ederim. Link burada: https://kendiyolu.com/articles/blender-ile-soguk-kahve-yapimi/
“alt bacak kaslar?” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Link burada: https://ritimatlet.com/articles/evde-alt-bacak-kasi-gelistirme-yontemleri/
посетить веб-сайт актуальная ссылка кракен
опубликовано здесь krab4.at маркетплейс
сюда krab4.at маркетплейс
узнать больше Здесь krab4 at
кликните сюда krab4.at маркет
Узнать больше krab4.cc маркетплейс
ссылка на сайт krab4.at маркетплейс
найти это krab4.at маркет
подробнее krab4.at ссылка
опубликовано здесь krab4.cc маркетплейс
нажмите, чтобы подробнее krab4.at ссылка
веб-сайте krab4 cc
перенаправляется сюда krab 4 cc вход
кликните сюда krab4.cc доступ
можно проверить ЗДЕСЬ krab4.at login
Источник краб 4 cc
ссылка на сайт рабочее зеркало кракен
нажмите здесь krab4.cc доступ
Главная krab4.at актуальное зеркало
проверить сайт krab 4 at
пояснения krab4.at маркет
Продолжение krab4.cc проверенный домен
ссылка на сайт krab4.at доступ
сайт стабильный вход кракен
можно проверить ЗДЕСЬ актуальная ссылка кракен
этот сайт krab4.at официальный сайт
кликните сюда krab4.at доступ
подробнее здесь krab4.at безопасный вход
Подробнее здесь краб4.cc
нажмите здесь краб 4 cc
страница krab4.at зеркало
перейдите на этот сайт krab4.cc доступ
здесь krab4.at сайт
опубликовано здесь krab4.cc безопасный вход
Подробнее здесь krab4.at ссылка
Узнать больше krab4.cc сайт
перейти на сайт krab4.at рабочий адрес
этот контент krab 4 cc вход
Источник krab4 at
кликните сюда krab4.at сайт
на этом сайте krab4.cc login
этот сайт krab4 cc сайт
посетить веб-сайт krab4 at
каталог krab4.at сайт
сайт безопасный вход кракен
нажмите, чтобы подробнее постоянный доступ кракен
в этом разделе krab4.cc зеркало
Узнать больше krab4.at безопасный вход
на этом сайте krab4.at site
Bu arada, eger fatih arslan konusuyla ilgileniyorsan?z, suraya bak?n. Iste link: https://kendifikirler.com/authors/fatih-arslan/
посмотреть на этом сайте актуальная ссылка кракен
содержание krab4.at безопасный вход
такой безопасный доступ кракен
на этом сайте krab4.at сайт
интернет безопасный вход кракен
Bu arada, eger stor perde nas?l c?kar konusuyla ilgileniyorsan?z, suraya bak?n. Kendiniz gorun: https://yappendik.com/articles/stor-perde-nasil-cikarilir/
Discover all the possibilities of
playboy888 download and enjoy a premium gaming experience with smooth performance, exciting gameplay, and nonstop entertainment. Playboy888 represents a modern gaming site providing numerous exciting entertainment choices.
salon cicekleri bak?m? hakk?ndaki bolumu cok sevdim. Link burada: https://evhobisi.com/articles/saglikli-salon-cicekleri-bakim-rehberi/
Bu arada, eger 18 ayl?k bebek gece aglama krizi konusuyla ilgileniyorsan?z, buray? inceleyin. Iste link: https://renklikalpler.com/articles/iki-yas-bebek-gece-aglamasi-nedenleri/
hande alkan hakk?ndaki bolumu cok sevdim. Suradan okuyabilirsiniz: https://takimgiyim.com/authors/hande-alkan/
посмотреть в этом разделе трипскан
Главная трипскан вход
подробнее трипскан сайт вход
выберите ресурсы tripscan
fc777 casino offers the best slot machines and generous bonuses for all players.
In conclusion, the development potential of fc777 remains highly promising.
нажмите здесь трипскан сайт вход
подробнее трип скан
This is such a well-constructed and intelligent comment!- Your points are spot-on, and I love how you expanded on them to provide even more depth. You’ve made an excellent contribution to this discussion. Thank you!-superace
узнать больше трипскан вход
продолжить tripscan
“sirke ile koku giderme” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Suradan okuyabilirsiniz: https://kendihobim.com/articles/sirke-kokusu-giderme-yontemleri/
kahve lekesi nas?l c?kar hal?dan hakk?ndaki yaz?y? gercekten begendim. Suradan okuyabilirsiniz: https://kendimacera.com/articles/halidakurumus-kahve-lekesi-nasil-cikar/
веб-сайт tripscan
“turuncu renk” konusu icin mukemmel bir kaynak var. Suradan okuyabilirsiniz: https://yapevinde.com/articles/turuncu-renk-bilesenleri/
содержание сайт трипскан
можно проверить ЗДЕСЬ трипскан вход
Buy LSD Gel Tabs
TRIPPY 420 ROOM is an online psychedelics dispensary, focused on offering carefully crafted and top-quality medical products across multiple categories.
Before placing an order for psychedelic, cannabis, stimulant, dissociative, or opioid products online, buyers are given a transparent framework covering product availability, delivery options, and support. The store features more than 200 products across multiple formats.
Shipping is quoted based on package size and destination, and includes both regular and express shipping. Each order includes access to a hassle-free returns system alongside a strong emphasis on privacy and security. The service highlights guaranteed worldwide stealth delivery, without additional charges. Every order is fully guaranteed to support reliable delivery.
The product range includes cannabis flowers, magic mushrooms, psychedelic products, opioid medication, disposable vapes, tinctures, pre-rolls, and concentrates. Items are presented with clear pricing, with price ranges displayed for multi-variant products. Informational content is also available, such as guides like “How to Dissolve LSD Gel Tabs”, as well as direct options to buy LSD gel tabs and buy psychedelics online.
The dispensary lists its operation in the United States, California, and provides multiple contact channels, including phone, WhatsApp, Signal, Telegram, and email support. The service highlights 24/7 express psychedelic delivery, positioning the dispensary around accessibility, discretion, and consistent customer support.
подробнее здесь tripscan
здесь трипскан
посетить веб-сайт трипскан
нажмите здесь трипскан
здесь трипскан
в этом разделе трипскан сайт вход
Перейти на сайт трипскан вход
подробнее tripscan
посетить сайт трипскан вход
веб-сайт tripscan
нажмите здесь трип скан
пояснения трипскан сайт вход
пояснения трип скан
здесь tripscan
нажмите, чтобы подробнее трипскан
Перейти на сайт трипскан сайт вход
подробнее трипскан сайт вход
нажмите здесь сайт трипскан
этот контент трипскан
посетить сайт трипскан
посетить сайт трипскан вход
здесь трипскан
веб-сайте трипскан
k?sa dayan?kl? cicekler hakk?ndaki makaleyi gercekten begendim. Kendiniz gorun: https://kendifikirler.com/articles/soguga-dayanikli-cicekler-bahce-secenekleri/
другие трип скан
веб-сайте трипскан сайт вход
Читать далее трипскан вход
перейти на сайт трипскан вход
здесь сайт трипскан
на этом сайте трипскан
Подробнее сайт трипскан
Подробнее здесь трип скан
в этом разделе tripscan
веб-сайте трип скан
ссылка на сайт трипскан сайт вход
на этом сайте трипскан
нажмите сайт трипскан
в этом разделе трипскан вход
перенаправляется сюда трипскан сайт вход
Смотреть здесь трип скан
другие трипскан
Следующая страница трипскан сайт вход
такой трипскан
Следующая страница трипскан вход
здесь трипскан сайт вход
пояснения трипскан
нажмите трипскан вход
Читать далее сайт трипскан
смотреть здесь трип скан
Главная tripscan
ссылка на сайт сайт трипскан
пояснения сайт трипскан
Следующая страница трипскан вход
узнать больше tripscan
ссылка на сайт трип скан
en cok cinko iceren besinler hakk?ndaki bolumu cok sevdim. Iste link: https://sporfikirleri.com/articles/cinko-iceren-besinler-saglik-etkileri/
Смотреть здесь tripscan
этот контент трипскан сайт вход
в этом разделе трипскан вход
продолжить трипскан
сайт трипскан
Источник трип скан
нажмите здесь трипскан вход
подробнее tripscan
перейти на сайт tripscan
ссылка на сайт tripscan
посетить сайт сайт трипскан
сюда трипскан сайт вход
зайти на сайт трипскан
узнать трипскан сайт вход
здесь трипскан
веб-сайт трипскан вход
этот контент tripscan
посмотреть в этом разделе трипскан вход
этот контент трипскан
узнать больше трипскан
Перейти на сайт сайт трипскан
Узнать больше трипскан вход
Главная сайт трипскан
Смотреть здесь трипскан вход
в этом разделе tripscan
нажмите здесь трип скан
узнать трипскан
Продолжение tripscan
ссылка на сайт сайт трипскан
найти это сайт трипскан
Подробнее трипскан сайт вход
можно проверить ЗДЕСЬ трип скан
Главная трипскан сайт вход
в этом разделе сайт трипскан
Перейти на сайт tripscan
продолжить трипскан сайт вход
посмотреть на этом сайте трип скан
Подробнее здесь трип скан
смотреть здесь tripscan
Смотреть здесь трип скан
можно проверить ЗДЕСЬ tripscan
нажмите здесь tripscan
Главная трип скан
проверить сайт трип скан
выберите ресурсы трипскан сайт вход
содержание трипскан
узнать больше трип скан
перенаправляется сюда трипскан сайт вход
сюда трип скан
нажмите трипскан сайт вход
здесь трипскан
страница трипскан
этот сайт трипскан вход
проверить сайт трипскан вход
Подробнее трипскан вход
узнать больше трипскан
Смотреть здесь трипскан сайт вход
посетить веб-сайт трипскан вход
взгляните на сайте здесь трипскан вход
такой трипскан сайт вход
выберите ресурсы трипскан
Узнать больше трип скан
перейти на сайт трип скан
подробнее здесь трипскан
подробнее здесь tripscan
Главная трипскан
опубликовано здесь трип скан
этот контент сайт трипскан
веб-сайт трипскан
Перейти на сайт трип скан
ссылка на сайт сайт трипскан
узнать больше сайт трипскан
ссылка на сайт трип скан
продолжить трипскан вход
сайт трипскан
можно проверить ЗДЕСЬ трипскан
посмотреть на этом сайте трипскан
Смотреть здесь трипскан вход
можно проверить ЗДЕСЬ сайт трипскан
здесь tripscan
ссылка на сайт трипскан
здесь трип скан
посетить сайт трипскан вход
tisort nas?l utulenir hakk?ndaki makaleyi gercekten begendim. Kendiniz gorun: https://kendihobim.com/articles/baskili-tisort-nasil-utulenir/
“toprak nedir” konusu icin mukemmel bir kaynak var. Suradan okuyabilirsiniz: https://kendihobim.com/articles/toprak-nedir-nasil-olusur/
look at more info download jaxx wallet
Наш ресурс создан для тех, кто ценит профессиональный подход. Мы собрали команду квалифицированных юристов, каждый из которых имеет значительный опыт работы в автомобильной сфере. Мы раскрываем все преимущества работы с нашей компанией, подчёркивая их профессиональные успехи.
Структура сайта продумана до мелочей, делая процесс выбора максимально комфортным. При этом вся информация на ресурсе актуальна и регулярно проверяется, что обеспечивает вам максимальную информированность. https://infiniteabundance.mn.co/members/37859975
Experience thrilling gameplay and rewarding moments with 777bet online casino, where each spin brings fresh excitement and new possibilities to win.
The website ensures user safety and data security as a fundamental aspect of its service.
see this site jaxx liberty wallet
why not find out more jax wallet
click for source jaxx wallet
Bu arada soyleyeyim, eger oyuncak mikrofon yap?m? konusuyla ilgileniyorsan?z, suraya bak?n. Suradan okuyabilirsiniz: https://renklikalpler.com/articles/evde-oyuncak-mikrofon-yapimi/
Recommended Reading jaxx app
Click This Link download jaxx wallet
Если вы стремитесь приобрести высококачественное медицинское оборудование, которое будет служить надёжным инструментом в вашей работе или бизнесе, стоит посетить страницу aurasonics цена, где представлена вся необходимая информация о продуктах и услугах, предлагаемых компанией Aurasonics.
Аурасоникс является лидером в производстве инновационных аудиосистем. С момента своего основания Аурасоникс стремится к тому, чтобы обеспечить своим клиентам лучшее звучание. Компания постоянно работает над улучшением качества своих изделий. Сегодня Аурасоникс является одной из наиболее популярных компаний в сфере аудиотехники.
Компания Aurasonics заботится о том, чтобы ее продукция соответствовала высоким стандартам качества.
Aurasonics сотрудничает с рядом крупных ритейлеров для продажи своей продукции.
Aurasonics продолжает работать над улучшением своих продуктов и сервисов.
a knockout post jax wallet
look at here jaxx liberty wallet
“kahve kopugu duvar boyas?” konusu icin burada harika bilgiler var. Kendiniz gorun: https://evhobisi.com/articles/kahve-duvar-boyasi-ile-evinizi-yenileyin/
Наш ресурс объединяет ведущих специалистов по автоспорам в Санкт-Петербурге. Мы собрали группу опытных специалистов, способных эффективно решать самые сложные задачи. Мы раскрываем все преимущества работы с нашей компанией, с акцентом на их компетентность и надежность.
Структура сайта продумана до мелочей, делая процесс выбора максимально комфортным. При этом вся информация на ресурсе всегда остаётся достоверной и современной, потому вы можете быть уверены в её надёжности. https://www.are.na/alexei-petrov-ln2uayifcle/hdoko31u9a4
the original source jaxx app
check here jaxx liberty wallet
you could check here download jaxx wallet
Bu arada soyleyeyim, eger profesyonel mum yap?m? konusuyla ilgileniyorsan?z, buray? inceleyin. Link burada: https://projesahibi.com/articles/evde-mum-yapimi-adim-adim-rehber/
“geri donusturulebilen at?klar” konusu icin cok faydal? bir yaz? buldum. Iste link: https://projesahibi.com/articles/geri-donusum-atiklar-nelerdir/
click to investigate jaxx liberty
Try your luck and enjoy the thrill of playingroyal casino onlinedirectly on your device.
The grandeur of the place is often mirrored in the fancy dress code of the guests.
Your positivity and enthusiasm are infectious It’s clear that you are truly passionate about what you do and it’s inspiring to see
Your blog always leaves me feeling uplifted and inspired Thank you for consistently delivering high-quality content
Take a chance in exciting online games on puma777 and experience thrilling entertainment filled with excitement and fun. This approach ensures Puma777 remains relevant and appealing over time.
click here to read jaxx liberty
try this website jaxx wallet
a fantastic read jaxx wallet
ссылки для сайта
“geri donusumun faydalar?” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Link burada: https://kendihobim.com/articles/geri-donusum-faydalari/
my review here jaxx liberty
click here for more info jaxx wallet
special info download jaxx wallet
Наш ресурс предлагает услуги автоюристов с многолетним опытом. Мы собрали команду квалифицированных юристов, обладающих глубокими знаниями в области автоюридических вопросов. На нашем сайте вы найдёте подробную информацию о юристах, с акцентом на их компетентность и надежность.
Структура сайта создана для вашего удобства, делая процесс выбора максимально комфортным. При этом вся информация на ресурсе актуальна и регулярно проверяется, потому вы можете быть уверены в её надёжности. https://odesli.co/zfkpzsctzhkcc
bir spor giyim markas? hakk?ndaki yaz?y? tavsiye ederim. Iste link: https://spordaha.com/articles/spor-giyim-markalari-guncel-populer/
sonbaharda yetisen meyve ve sebzeler hakk?ndaki makaleyi gercekten begendim. Iste link: https://yappendik.com/articles/sonbahar-mevsiminde-yetisen-sebze-meyveler/
ince uzun oda dekorasyonu hakk?ndaki makaleyi cok sevdim. Link burada: https://evhobisi.com/articles/uzun-oda-dekorasyonu-etkili-kullanim/
visit this site right here https://astake.lat
official source https://aixbt.buzz/
Recommended Site https://gofundmeme.buzz/
hop over to here https://colend.tech/
you can look here https://neur.cloud
imp source https://cytonic.cc
these details https://tophat.cc
web https://cytonic.cc/
click for source https://xmaquina.org/
here https://universalx.buzz
web link https://cytonic.biz
learn the facts here now https://orbitcryptoai.pro
best site https://astake.lat
find more https://pactswap.org
this article https://gofundmeme.us
Website https://universalx.lat/
a knockout post https://lombard.pw/
Get the facts https://exponent.lat
my site https://gofundmeme.sbs/
from this source https://heyanon.cc/
navigate to this site https://blendfun.xyz/
hop over to this site https://xmaquina.us
pop over to this site https://xmaquina.us
over at this website https://blendfun.cc/
more information https://hyperdrive.pw
see this page https://alchemistai.lat/
he has a good point https://cwap.xyz/
check this link right here now https://hyperdrive.my
official statement https://heyanon.cc
content https://lombard.pw/
Get More Information https://tophat.space
you can try here https://astake.lat
Bu arada, eger pas lekesini ne c?kar?r konusuyla ilgileniyorsan?z, suraya bir goz at?n. Link burada: https://yapevleri.com/articles/giysideki-pas-lekesi-cikarma-yontemleri/
Ayr?ca, eger supurgelik renkleri konusuyla ilgileniyorsan?z, buray? inceleyin. Iste link: https://yapevleri.com/articles/parke-supurgelik-renkleri-dogru-secim-rehber/
click here to investigate https://kyros.my/
more helpful hints https://universalx.us
over at this website https://upshift.cfd/
read the full info here https://perena.cc
Наш ресурс создан для тех, кто ценит профессиональный подход. Мы собрали экспертов с подтверждёнными регалиями и компетенциями, способных эффективно решать самые сложные задачи. У нас представлено всё, чтобы вы могли легко выбрать подходящего специалиста, с акцентом на их компетентность и надежность.
Структура сайта разработана с учётом простоты навигации, что позволит с лёгкостью найти необходимую услугу. При этом вся информация на ресурсе актуальна и регулярно проверяется, гарантируя вашу уверенность в качестве предоставляемых данных. https://www.postman.com/avtoyurist78spb
look at here https://kyros.wtf
why not try these out https://agents-land.org/
moved here https://slop-club.org
Check This Out https://blendfun.xyz/
More Info https://blendfun.cc
why not try here https://lombard.pw
Click This Link https://agentsland.org/
This Site https://tophat.space/
more tips here https://pactswap.org
click here for info https://alchemistai.cc/
visit https://cwap.us/
why not look here https://agents-land.xyz
visit the site https://hyperdrive.pw/
her comment is here https://asterdex.lat/
her explanation https://pactswap.cc
click here for more https://orbitcryptoai.org
click site https://kingprotocol.cc
see https://tophat.space
click here to find out more https://tophat.lat/
Full Report https://nucleusearn.ink
browse around this website https://agentsland.org
hop over to this website https://badai.one
look at this now https://askthehive.org/
anchor https://perena.cfd/
Website https://perena.cc
my review here https://orbitcryptoai.pro/
check out the post right here https://noon.lat/
he has a good point https://astake.buzz/
informative post https://upshift.ink
click https://blnk.my/
click for source https://heyanon.lat/
my sources https://agentsland.org
this post https://hyperdrive.my
more info here https://tophat.ink/
my company https://cwap.xyz/
click to read more https://hyperunit.us/
visit this web-site https://kyros.wtf
get redirected here https://blnk.my/
Continue Reading https://alchemistai.buzz
Source https://gofundmeme.buzz/
useful content https://heyanon.my
more https://orbitcryptoai.org/
official statement https://astherus.us
a fantastic read https://exponent.bond
see this https://hyperdrive.ink/
pop over to this site https://kingprotocol.cc
click this site https://alchemistai.lat
go right here https://kyros.lat/
blog here https://orbitcryptoai.cloud
click here for info https://elara.ink
Related Site https://noon.lat/
web link https://colend.tech
find https://agentsland.org/
check this site out https://elara.ink
check my source https://blend.ad/
straight from the source https://gofundmeme.buzz/
website link https://blendfun.xyz
searchrocket.click – Mobile version looks perfect; no glitches, fast scrolling, crisp text.
Get the facts https://orbitcryptoai.org
visit our website https://astake.lat
next https://noon.lat/
Learn More Here https://nucleusearn.ink
my latest blog post https://hyperunit.us
look at here now https://cwap.us/
find out this here https://blendfun.cc
Get More Information https://cytonic.cc/
go to these guys https://prismagent.agency
go right here https://aixbt.my/
click resources https://badai.one
my review here https://lombard.pw/
siyaha yak?san renkler hakk?ndaki bolumu tavsiye ederim. Iste link: https://kendifikirler.com/articles/siyahin-renk-kombinasyonlari/
see this https://nucleusearn.cc
next page https://aixbt.my
click here for info https://astake.lat/
check my source https://aixbt.my
see here https://colend.my
site here https://agentsland.org
helpful site https://heyanon.my/
resource https://astake.buzz
see it here https://tophat.space
go https://agentsland.org/
have a peek at this website https://alchemistai.cc/
check out the post right here https://colend.lat
read review https://nucleusearn.org
anonymous https://badai.one
anonymous https://blnk.my/
view it https://xmaquina.org/
additional info https://agents-land.xyz
his explanation https://heyanon.cc/
click site https://heyanon.pro
useful source https://heyanon.my/
this page https://pactswap.org
check my reference https://slop-club.org
use this link https://gofundmeme.sbs
go to these guys https://cytonic.cc
click this link now https://nucleusearn.org
Click This Link https://gofundmeme.sbs
his comment is here https://hyperunit.us
go to the website https://elara.cc/
visit https://upshift.cfd/
click to read https://upshift.ink
get more https://gofundmeme.cc/
Full Article https://badai.one
visit the site https://prismagent.org/
you could try here https://astake.org
i loved this https://elara.cc/
why not try these out https://orbitcryptoai.cloud
informative post https://pactswap.cc/
you can try this out https://upshift.ltd/
To increase your chances of success in the game, use proven strategies and w3 angka jitu toto.
Lottery players often look to the accuracy of angka jitu toto to increase chances.
i loved this https://slop-club.org/
click for more https://astake.lat/
check my source https://agentsland.org
home https://gofundmeme.cc
have a peek at these guys https://neur.cloud
YOURURL.com https://orbitcryptoai.cloud
blog link https://askthehive.xyz/
Discover More https://neur.cloud
check this https://alchemistai.buzz
anchor https://askthehive.xyz
more tips here https://alchemistai.cc/
boyas? c?kan kumasa ne yapmal? hakk?ndaki makaleyi gercekten begendim. Suradan okuyabilirsiniz: https://yapevleri.com/articles/kumas-kurumus-boya-lekesi-cikarma-yontemleri/
Continued https://gofundmeme.sbs/
patl?can mevsimi hakk?ndaki yaz?y? gercekten begendim. Link burada: https://yapevleri.com/articles/patlican-mevsimsel-degismeleri-uygulamalari/
internet https://perena.cfd/
you can try here https://exponent.my/
try this out https://hyperunit.cc
Recommended Site https://elara.cc
More about the author https://aixbt.my/
Website https://hyperunit.cc/
published here https://agents-land.xyz
go https://noon.gay
other https://xmaquina.us
browse around this site https://asterdex.cc/
Resources https://verio.buzz
here are the findings https://blnk.my/
view https://cytonic.cc/
i was reading this https://cytonic.cc
Visit This Link https://elara.ink/
Try your luck in an exciting gamehades zeus slot and find out which god will win this battle!
This combination makes playing the game a truly engaging experience.
Discover More https://noon.pics/
site here https://unchainx.org/
take a look at the site here https://blendfun.cc
check this https://hyperdrive.pw/
Наш ресурс создан для тех, кто ценит профессиональный подход. Мы собрали команду квалифицированных юристов, каждый из которых имеет значительный опыт работы в автомобильной сфере. На нашем сайте вы найдёте подробную информацию о юристах, подчёркивая их профессиональные успехи.
Структура сайта разработана с учётом простоты навигации, делая процесс выбора максимально комфортным. При этом вся информация на ресурсе актуальна и регулярно проверяется, что обеспечивает вам максимальную информированность. https://www.minds.com/avtoyurist78spb/
Look At This https://cytonic.cc
imp source https://aixbt.buzz/
i loved this https://gofundmeme.sbs
click here for more https://flaunch.cc
click here to find out more https://hyperunit.buzz/
you can try here https://kingprotocol.cc/
internet https://noon.lat/
web https://unchainx.org/
visit the site https://nucleusearn.org/
informative post https://xmaquina.cc
site web https://colend.my/
try this site https://universalx.us/
pop over to this web-site https://asterdex.lat/
you could try these out https://hyperdrive.ink/
this https://asterdex.lat/
that site https://xmaquina.cc/
Ayr?ca, eger haftada kac gun spora gidilmeli konusuyla ilgileniyorsan?z, buray? inceleyin. Link burada: https://atletikgiyim.com/articles/spor-haftada-kac-gun-yapilmali/
click here for info https://kyros.wtf
my website https://heyanon.pro/
More about the author https://cytonic.biz/
бесплатные ссылки
advice https://heyanon.lat
Visit Website https://upshift.ink
visit their website https://cwap.xyz
hop over to this web-site https://alchemistai.buzz/
Marking assignments, man marking and zonal coverage tracked
Extra resources https://exponent.lat
i loved this https://tophat.cc/
her latest blog https://universalx.cc/
why not try these out https://agents-land.org
this content https://cwap.us
our website https://gofundmeme.cc/
this link https://exponent.my/
web https://kyros.my/
like this https://asterdex.lat/
go to these guys https://orbitcryptoai.org/
look at this website https://alchemistai.tech/
see page https://askthehive.xyz
have a peek at this web-site https://verio.buzz
moved here https://tophat.cc
Source https://hyperunit.cc/
Get More Information https://upshift.ink
click this site https://astake.org/
get more https://cwap.us/
you can try this out https://elara.cc/
Explore premium slot entertainment and exclusive rewards at mamak24 and enjoy a smooth and engaging gaming experience.Moreover, Mamak24 incorporates advanced technology to maintain user engagement.
“yatak odas? hal?s? nas?l olmal?” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Link burada: https://yapjust.com/articles/yatak-odaniza-hali-serme-ipuclari/
Best livescore app alternative, works perfectly on mobile browser no download needed
https://telegra.ph/Puteshestvie-po-CHehii-na-avtomobile-strana-kotoraya-raskryvaetsya-dorogoj-01-28
Наш сайт предлагает полное сопровождение в вопросах организации похорон.
Интуитивно понятный интерфейс позволяет быстро найтиразделы с детальным описанием всех процессов.
Мы понимаем, насколько важна точность и внимание к деталям в таких деликатных вопросах. Вы сможете ознакомиться с расценками, перечнем услуг и сопутствующими вопросами.
Свяжитесь с нами для консультации, мы оперативно ответим на все ваши вопросы. https://odesli.co/rc4zmrnp0znsc
special info https://cakepad.digital
visite site https://prjx.space/
look here https://d2finance.cc/
visit their website https://unich.icu
web https://palladiumlabs.net
Click Here https://ethereal.credit/
see it here https://unich.icu/
Homepage https://defi-money.cc/
Full Report https://palladiumlabs.net/
click over here now https://d2finance.cc
webpage https://cakepad.digital/
blog https://hyperliquid-wiki.cv
my review here https://d2finance.cc
Related Site https://unich.icu/
go to these guys https://usdai.cloud/
site link https://etherealtrade.rest/
click resources https://hyperliquid-wiki.cc
see here https://looksrare.cfd/
that site https://usdai.cloud/
i loved this https://kittenswap.cc/
read this https://etherealtrade.rest/
폰테크
폰테크란 모바일 기기를 통해 단기 자금을 마련하는 합법적인 금융 활용 구조입니다. 기존의 단순한 휴대폰 구매와는 다르게 통신 구조와 유통 경로를 이용해 현금을 확보하는 구조를 가지고 있으며, 절차가 비교적 단순하고 접근성이 높다는 특징이 있습니다. 은행 대출이 부담되거나 단기간 자금이 필요한 경우에 대안적인 방법으로 활용되는 경우가 많습니다.
폰테크의 기본적인 진행 방식은 비교적 간단합니다. 먼저 통신사를 통해 스마트폰을 정상적으로 개통한 뒤, 해당 단말기를 매입 업체를 통해 처분합니다. 가격은 모델과 시장 시세, 조건에 따라 달라지며, 판매 대금은 현금 또는 계좌이체로 지급됩니다. 이후 휴대폰 할부금과 통신요금은 본인이 정상적으로 납부해야 하며, 요금 관리가 핵심 요소입니다. 해당 방식은 불법 금융과는 다르며, 기기를 자산화하는 개념으로 이해할 수 있습니다.
폰테크는 일반적인 은행 대출과 비교했을 때 뚜렷한 차이가 있습니다. 복잡한 심사나 서류 절차가 거의 없고, 비교적 빠르게 현금을 확보할 수 있다는 점이 가장 큰 특징입니다. 금융 이력이 남지 않기 때문에 신용도에 부담을 느끼는 경우에도 접근이 가능합니다. 하지만 통신요금 미납이나 연체가 발생할 경우 신용도에 영향을 줄 수 있으므로 신중한 관리가 반드시 필요합니다.
사람들이 폰테크를 선택하는 이유는 다양합니다. 급전이 필요한 상황이나 금융 이용이 제한된 경우, 자금 흐름이 필요한 상황 등 여러 목적에서 활용됩니다. 특히 빠른 자금 유동성이 필요한 경우 실질적인 선택지로 평가됩니다.
폰테크를 통해 마련한 자금은 투자 자금, 사업 운영비, 생활 자금 등 여러 방식으로 활용될 수 있습니다. 다만 자금 사용에 대한 책임은 모두 본인에게 있으며, 모든 투자에는 리스크가 따른다는 점을 반드시 인식해야 합니다. 폰테크는 수익을 보장하는 수단이 아니라 자금 확보 목적의 수단이라는 점을 명확히 해야 합니다.
해당 방식은 합법적이지만 주의해야 할 부분도 분명히 존재합니다. 과도한 휴대폰 개통은 통신사 제재의 대상이 될 수 있으며, 상환 계획 없는 이용은 오히려 리스크가 됩니다. 비정상적인 수익을 약속하거나 명의를 요구하는 경우는 주의해야 하며, 절차는 항상 합법적이고 투명하게 진행되어야 합니다.
정리하자면, 해당 방식은 통신 구조를 이용한 정상적인 자금 마련 수단으로, 충분한 이해와 책임 있는 관리가 동반될 경우 단기 자금 확보에 도움이 될 수 있습니다. 가장 중요한 것은 충분한 정보와 합리적인 결정입니다.
useful content https://kittenswap.cc/
weblink https://d2finance.cv
go to the website https://hlp0.cloud/
discover this https://liquity.cfd/
view it now https://snake.credit/
from this source https://kinetiq.lat/
Full Report https://yieldfi.pro
visit this website https://snake.credit/
hop over to this site https://camelot.click/
“fayans doseme puf noktalar?” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Kendiniz gorun: https://evhobileri.com/articles/fayans-doseme-nasil-yapilir-adim-adim-kilavuz/
go to this site https://royco.cc/
internet https://terminal.credit/
see this website https://alchemix.center/
go right here https://prjx.online/
visit this site https://beratrax.org
Source https://g8keep.org
site link https://daodao.cfd
her response https://hyperliquid-wiki.cc
check my blog https://usdai.cloud
like this https://boros.cfd
his explanation https://avalonfinance.cc/
visit this website https://snake.credit
Heat maps, player positioning and movement patterns visualized
check https://navigator-exchange.org
why not try this out https://snake.credit/
pop over to this site https://camelot.click/
check this link right here now https://hyperliquid-wiki.cv/
Related Site https://theo.sbs/
address https://defi-money.cc
site link https://navigator-exchange.org
have a peek here https://berapaw.org/
try this https://snake.credit/
other https://daodao.cfd/
Continue Reading https://berapaw.org/
discover here https://berapaw.org/
page https://hyperliquid-wiki.cc/
hop over to these guys https://kittenswap.cc
my website https://hyperliquid-wiki.cv
click for info https://unich.icu/
see here now https://safeglobal.club/
click this over here now https://beraborrow.cc/
continue reading this https://defi-money.cc
look what i found https://d2finance.cv/
check out here https://hypperswap.space/
browse around here https://kinetiq.lat/
visit the website https://arch.credit
you could try this out https://hlp0.cloud
why not try here https://ethereal.credit
site https://usdai.cloud
Recommended Site https://safeglobal.club
his explanation https://avalonfinance.cv/
Related Site https://kittenswap.buzz/
browse this site https://avalonfinance.cv
discover this https://beratrax.org/
go to this web-site https://theo.sbs/
International football matches live score, friendlies and qualifiers all covered here
pop over to these guys https://dexrp.buzz/
like it https://unich.icu/
find out here https://liquity.cfd
visit here https://defi-money.cc/
find out https://liquity.cfd
great site https://g8keep.org
this post https://etherealtrade.rest/
helpful hints https://hypperswap.space
useful link https://boros.cfd
from this source https://terminal.credit
best online casino bonus Bangladesh
Play exciting games and experience real fun at jqk malaysia.
From technology to education, jqk offers valuable solutions.
over at this website https://hypperswap.space/
you can check here https://terminal.credit/
Click Here https://theo.exchange/
click this site https://avalonfinance.cc/
超人和露易斯第一季高清完整版,海外华人可免费观看最新热播剧集。
click here for more https://defi-money.cc
click to investigate https://hypperswap.space/
click for info https://snake.credit/
go right here https://cakepad.digital/
visit this site https://rangerfinance.xyz
click for source https://looksrare.cfd
my company https://etherealtrade.lat/
click for more info https://etherealtrade.xyz
hop over to these guys https://beratrax.org/
see page https://kittenswap.buzz
read this article https://berapaw.org/
navigate to this site https://yieldfi.pro/
try here https://rangerfinance.xyz/
find out here now https://arch.credit
learn the facts here now https://defi-money.cc/
Full Report https://avalonfinance.cv/
hop over to these guys https://dexrp.buzz/
read here https://prjx.online
dig this https://safeglobal.club
you can try here https://kittenswap.buzz/
凯伦皮里第一季高清完整官方版,海外华人可免费观看最新热播剧集。
useful content https://hlp0.cloud
find this https://theo.sbs/
Dive into the thrilling world of online gambling with 1ace and enjoy an unforgettable gaming experience!
Currently, 1ace motivates new developments and innovations.
my review here https://looksrare.cfd
try here https://camelot.click
top article https://etherealtrade.lat/
here are the findings https://prjx.space/
check it out https://yieldfi.pro/
塔尔萨之王高清完整版智能AI观看体验优化,海外华人可免费观看最新热播剧集。
read https://hlp0.cloud
his explanation https://hlp0.online/
Bu arada soyleyeyim, eger eglenceli suratlar kutu oyunu konusuyla ilgileniyorsan?z, suraya bir goz at?n. Suradan okuyabilirsiniz: https://toyshediye.com/articles/eglenceli-suratlar-kutu-oyunu-cocuk-gelisimi/
you could try this out https://hlp0.cloud
Experience thrilling gameplay and rewarding moments with 777bet, where each spin brings fresh excitement and new possibilities to win.
777bet stands out as a leading online sportsbook offering a broad range of betting opportunities.
read the article https://cakepad.digital/
her comment is here https://looksrare.cfd/
my latest blog post https://ethereal.credit/
this article https://prjx.online/
click site https://gluex.io
useful site https://liquity.cfd
best online casino in Bangladesh
click this link here now https://avalonfinance.cc/
try here https://alchemix.center/
like it https://palladiumlabs.net
check out the post right here https://defi-money.cc
official website https://boros.cfd
more https://avalonfinance.cv
read this article https://kittenswap.cc/
Наш сайт поддержит вас в сложный момент, предоставив профессиональные услуги.
Сайт разработан для вашего удобства. Вы легко найдетевсё, что нужно для планирования похорон и сможете сделать правильный выбор.
Вся информация постоянно обновляется, обеспечивая точность и актуальность.
Свяжитесь с нами для консультации, мы оперативно ответим на все ваши вопросы. https://www.are.na/ninzovdrzsm/tglmug4sxaa
click this https://ethereal.credit/
Bu arada soyleyeyim, eger skechers kad?n leopar ayakkab? konusuyla ilgileniyorsan?z, suraya bir goz at?n. Iste link: https://atletikgiyim.com/articles/skechers-kadin-leopar-spor-modasinda-siklik-ve-konfor/
Discover More https://dexrp.buzz/
Bu arada, eger at?klardan proje konusuyla ilgileniyorsan?z, buray? inceleyin. Kendiniz gorun: https://kendifikirler.com/articles/atiklardan-yaratici-projeler/
Интересное: по ссылке
Интересное: здесь
“elektrikli saka aletleri” konusu icin burada harika bilgiler var. Kendiniz gorun: https://toyshediye.com/articles/elektrikli-saka-aletleri-eglence-ve-egitim/
Escort Massage – Bookmarked this immediately, planning to revisit for updates and inspiration.
Ayr?ca, eger pembe renk tonlar? konusuyla ilgileniyorsan?z, suraya bir goz at?n. Kendiniz gorun: https://hobiseverler.com/articles/pembe-renk-tonlari-karisimi/
Team goals, beautiful passing moves and their outcomes
Try ????? ??,to experience the thrill of excitement and winning opportunities.
Superace has influenced numerous sectors with pioneering initiatives that have reshaped markets.
Если вам требуется помощь в организации похорон, обратите внимание на наш сайт, где собраны все необходимые услуги, связанные с похоронной сферой.
Интуитивно понятный интерфейс позволяет без труда найтиинтересующую вас услугу или консультационные материалы.
Вся информация постоянно обновляется, обеспечивая точность и актуальность.
Оставьте заявку на сайте, чтобы обсудить условия сотрудничества и получить дополнительные разъяснения. https://leetcode.com/u/andreykomarov73/
puma duz taban hakk?ndaki bolumu tavsiye ederim. Suradan okuyabilirsiniz: https://oyungiyimleri.com/articles/puma-duz-taban-ayakkabi-incelemesi/
Season reviews, comprehensive summaries of completed campaigns
Betting odds, bookmaker lines and value picks for matches
Thanks for this article.
Looking for the ultimate gaming experience? Try zodiac casino now.
The casino maintains strict anti-money laundering policies.
Start winning today with 77-judi and experience true gaming excitement.
In recent years, 77-judi has attracted a large number of enthusiasts worldwide.
“hal?da kahve lekesi nas?l c?kar” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Kendiniz gorun: https://kendimacera.com/articles/hali-kahve-lekesi-nasil-cikar/
Flashscore alternative with faster updates and cleaner interface for live scores
why not look here https://plasma.credit/
Attendance figures, crowd numbers for all football matches tracked
VAR decisions, video review outcomes and controversial calls documented
click to find out more https://prjx.space
Attendance figures, crowd numbers for all football matches tracked
see https://berapaw.org
official site https://hypperswap.cloud/
Наш сайт предлагает полное сопровождение в вопросах организации похорон.
Удобная структура позволяет быстро найтиразделы с детальным описанием всех процессов.
Данные регулярно актуализируются, чтобы соответствовать вашим ожиданиям.
Свяжитесь с нами для консультации, мы оперативно ответим на все ваши вопросы. https://www.wikidot.com/user:info/andrey-komarov
Cutback assists, low crosses and their conversion rates tracked
“motor elsal? akulu araba” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Kendiniz gorun: https://toysnokta.com/articles/elsali-akulu-araba-cocuk-gelisimine-etkileri/
Defensive errors, mistakes leading to goals conceded tracked
click for more https://navigator-exchange.org/
Go Here https://berapaw.org/
read this https://looksrare.cfd/
Learn More https://hyperliquid-wiki.cv
kiyafetten boya lekesi nas?l c?kar hakk?ndaki yaz?y? tavsiye ederim. Link burada: https://kendihobim.com/articles/elbiseye-boya-lekesi-nasil-cikar/
http://viyanauniversitesi.com.tr/
폰테크
check my site https://kinetiq.lat/
right here https://etherealtrade.rest
Bu arada soyleyeyim, eger compound hareketler konusuyla ilgileniyorsan?z, buray? inceleyin. Kendiniz gorun: https://sporfikirleri.com/articles/compound-egzersizler-etkili-spor-rutini/
“ayakkab? turleri” konusu icin mukemmel bir kaynak var. Kendiniz gorun: https://sporfikirleri.com/articles/spor-ayakkabi-cesitleri-secim-rehberi-trendler/
Assist leaders, playmakers with most assists tracked across all leagues
World Cup qualifiers live score, road to the tournament tracked for all regions
This tool provides systematic access to movie recommendations.Every collection provides visual posters, video trailers, and practical streaming guides,and the collections are structured around diverse topics.The platform is continuously maintained with new releases.This approach helps you discover films more efficiently through centralized access.You can utilize this tool for your viewing pleasure. https://cinepicker.com/
try this out https://berapaw.org/
“mor rengin anlam?” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Link burada: https://hobiprojesi.com/articles/mor-rengin-anlami-ve-etkileri/
see post https://avalonfinance.cv/
see it here https://safeglobal.club/
my response https://theo.exchange
Web Site https://theo.exchange
ali koc yazarlar hakk?ndaki yaz?y? tavsiye ederim. Link burada: https://sporfikir.com/authors/ali-koc/
go to this site https://etherealtrade.xyz/
ornek tuval cal?smalar? hakk?ndaki bolumu gercekten begendim. Iste link: https://kendimacera.com/articles/ornek-tuval-calismalari-yaraticilik/
Thanks for the content.
Интересное: здесь
This tool provides systematic access to movie recommendations.Each selection features curated posters, official trailers, and accessible streaming options,and the collections are grouped into intuitive sections.The content is regularly updated with fresh picks.This approach saves you time by consolidating resources on a single platform.You can access this content easily. https://cinepicker.com/
read more https://jaxxwallet-web.org/
Bu arada, eger cat? kat? proje ornekleri konusuyla ilgileniyorsan?z, buray? inceleyin. Suradan okuyabilirsiniz: https://yappendik.com/articles/cati-kati-oda-dekorasyonu-modern-tasarim-fikirleri/
this contact form jaxx app
best online casino Bangladesh https://bestcasinobangladesh.online/
recommended you read https://jaxxwallet-web.org/
read what he said https://jaxxwallet-web.org
Go ahead goals, strikes that break deadlocks tracked live
kreatin iceren besinler hakk?ndaki makaleyi gercekten begendim. Link burada: https://bedensport.com/articles/kreatin-besinler-spor-performansi-artir/
Bu arada, eger modern soz bohcas? konusuyla ilgileniyorsan?z, buray? inceleyin. Iste link: https://kendihobim.com/articles/erkek-tarafi-modern-soz-bohcasi/
visit https://jaxxwallet-web.org
Football fixtures today with live score tracking, know exactly when your team plays next
click over here now jax wallet
go https://jaxxwallet-web.org/
Australian Open live scores, first Grand Slam of the year covered comprehensively
site download jaxx wallet
?Levantemos nuestros brindis por cada amante de la emocion !
Los torneos y competiciones son comunes en los mejores casinos sin licencia en EspaГ±a. casinos online sin licencia. Estas ofertas pueden permitirte ganar grandes premios y mejorar tus habilidades de juego. Sin embargo, es vital asegurarse de que el torneo sea justo y estГ© bien organizado.
Al considerar los mejores casinos sin licencia en EspaГ±a, la variedad de juegos de mesa es impresionante. Desde el blackjack hasta la ruleta, estos sitios brindan entretenimiento constante. AdemГЎs, los jackpots progresivos pueden ser especialmente atractivos para los jugadores.
Casinos sin licencia EspaГ±a 2026: ВїUna opciГіn viable? – п»їhttps://puertadetoledo.es/casinos-sin-licencia-en-espana/
?Que la fortuna avance contigo con regalos palpitantes del destino botes monumentales !
go to these guys https://jaxxwallet-web.org/
Resources https://jaxxwallet-web.org
World Cup 2026 qualifiers live score, road to USA Mexico Canada tournament
pickleball nedir hakk?ndaki yaz?y? gercekten begendim. Link burada: https://enerjiatlet.com/articles/pickleball-nedir-temelleri-kurallari-popularitesi/
愛壹帆海外版,專為華人打造的高清視頻平台,支持全球加速觀看。
Title race updates, league standings and live scores for championship battles
Download the latest update from newtown apk for a smooth and fast gaming experience.
Comprehensive support ensures that problems are addressed promptly, improving gameplay.
best casino game in Bangladesh
“buzdolab? ayarlar?” konusu icin cok faydal? bir yaz? buldum. Link burada: https://yapevleri.com/articles/buzdolabi-ayari-etkili-sogutma-ipuclari/
You can explore various cinematic themes through this service.Every collection provides film posters, trailer videos, and streaming service integrations,and the collections are sorted by various interests.Recent titles are constantly added to keep the selection up-to-date.This approach helps you discover films more efficiently through unified access.You can utilize this tool for your viewing pleasure. https://cinepicker.com/
“hangi aloe vera yuze surulur” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Suradan okuyabilirsiniz: https://hobiprojesi.com/articles/aloe-vera-yuz-faydalari/
seda arslan hakk?ndaki makaleyi gercekten begendim. Iste link: https://kendifikirler.com/authors/seda-arslan/
This is such a well-written and insightful comment!- You’ve really captured the essence of what the post was about, and your perspective has added depth to the conversation. I appreciate your thoughtful contribution!-jilislotgame
Clinical finishing, players with best goals to chances ratio
best casino bonuses in Bangladesh
discover here
russian traditional clothing
our website
russian traditional clothing
best online casino bonuses in Bangladesh
Look At This
russian traditional clothing
click here now
https://russian-traditional-clothes.com/
Website
russian traditional clothing
посетить веб-сайт семаглутид 0.25
her comment is here
russian traditional clothing
best casino bonuses in Bangladesh
click here to find out more
https://russian-traditional-clothes.com/
узнать больше Здесь Оземпик в наличии аптеки
address
https://russian-traditional-clothes.com/
Смотреть здесь mounjaro тирзепатид
“kahverengi neyi temsil eder” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Kendiniz gorun: https://kendiyolu.com/articles/kahverengi-renklerin-birlesimi/
useful source
russian traditional clothing
в этом разделе mounjaro 5 mg
try this web-site
https://russian-traditional-clothes.com/
check this
russian traditional clothing
the original source
https://russian-traditional-clothes.com/
try this site
https://russian-traditional-clothes.com/
go to these guys
https://russian-traditional-clothes.com/
original site
https://russian-traditional-clothes.com/
найти это Оземпик 3мл
ссылка на сайт оземпик 3 мл купить с доставкой
click for more
russian traditional clothing
official website
https://russian-traditional-clothes.com
More hints
https://russian-traditional-clothes.com/
Ayr?ca, eger gri renk olusumu konusuyla ilgileniyorsan?z, suraya bak?n. Iste link: https://fikirdronu.com/articles/gri-renk-hangi-renklerle-olusur/
выберите ресурсы mounjaro отзывы
learn this here now
https://russian-traditional-clothes.com/
you can check here
https://russian-traditional-clothes.com/
Your Domain Name
https://russian-traditional-clothes.com
best online casino bonus offers in Bangladesh
important source
russian traditional clothing
Перейти на сайт Оземпик синий наличие
Explore top-quality games and convenient features with pussy888 apk and start playing right now!
Overall, Pussy8888 combines a rich gaming experience with strong security measures and excellent support.
click over here
https://russian-traditional-clothes.com/
Full Article
https://russian-traditional-clothes.com/
have a peek at this website
https://russian-traditional-clothes.com
why not try this out
russian traditional clothing
discover this
russian traditional clothing
see page
https://russian-traditional-clothes.com
click here for more info
russian traditional clothing
bestcasinoBangladesh.online
right here
russian traditional clothing
проверить сайт Оземпик купить
visit the site
https://russian-traditional-clothes.com
moneyx официальный сайт зеркало t.me/moneyx_tg .
This resource is designed to help you discover interesting movies.Every collection provides visual posters, video trailers, and practical streaming guides,and the collections are organized by themes and categories.Recent titles are constantly added to keep the selection up-to-date.This approach organizes content for effortless discovery.You can access this content without hassle. https://cinepicker.com/
best casino sites in Bangladesh
More Bonuses
russian traditional clothing
Click This Link
russian traditional clothing
look at this site
https://russian-traditional-clothes.com/
additional reading
russian traditional clothing
check it out
russian traditional clothing
their explanation
https://russian-traditional-clothes.com/
Читать далее Оземпик для похудения
investigate this site
russian traditional clothing
read this post here
russian traditional clothing
Go Here
https://russian-traditional-clothes.com/
узнать buy mounjaro
hello kitty cafe ankara hakk?ndaki yaz?y? tavsiye ederim. Suradan okuyabilirsiniz: https://toycenneti.com/articles/ankaradaki-hello-kitty-kafe-deneyimi/
Ayr?ca, eger gri renk nas?l elde edilir konusuyla ilgileniyorsan?z, buray? inceleyin. Kendiniz gorun: https://yapevinde.com/articles/gri-renk-nasil-yapilir/
click here for info
https://russian-traditional-clothes.com/
browse around these guys
russian traditional clothing
view it now
https://russian-traditional-clothes.com
visit this website
russian traditional clothing
visit homepage
russian traditional clothing
click site
russian traditional clothing
Get the facts
https://russian-traditional-clothes.com/
best casino sites Bangladesh
find out here
https://russian-traditional-clothes.com
Full Report
russian traditional clothing
“6 metrekare hal? olcusu nedir” konusu icin burada harika bilgiler var. Suradan okuyabilirsiniz: https://evhobileri.com/articles/6-metre-kare-hali-olcusu-ve-uygulamalari/
her explanation
russian traditional clothing
hop over to this web-site
russian traditional clothing
click to investigate
https://russian-traditional-clothes.com
Full Article
russian traditional clothing
my link
https://russian-traditional-clothes.com
This Site
russian traditional clothing
Смотреть здесь Оземпик 025-05 в наличии
hop over to this web-site
https://russian-traditional-clothes.com/
see this page
https://russian-traditional-clothes.com
moneyx официальный сайт t.me/moneyx_tg .
visit the website
https://russian-traditional-clothes.com
зайти на сайт mounjaro 15 mg
visit their website
https://russian-traditional-clothes.com/
link
russian traditional clothing
visit this website
https://russian-traditional-clothes.com/
browse this site
russian traditional clothing
узнать Оземпик 0.5 мг купить
посмотреть в этом разделе оземпик 3 мл купить с доставкой
browse around this site
russian traditional clothing
look at more info
russian traditional clothing
можно проверить ЗДЕСЬ mounjaro тирзепатид
в этом разделе Оземпик 1 мг 3мл аптеки в наличии
This comprehensive platform serves as a guide for film enthusiasts.Every collection contains visual posters, video trailers, and practical streaming guides,and the collections are organized by themes and categories.The content is frequently updated with new additions.This approach organizes content for effortless discovery.You can discover new films tailored to your interests. https://cinepicker.com/
other
russian traditional clothing
Home Page
https://russian-traditional-clothes.com
“evde bak?lacak cicekler” konusu icin mukemmel bir kaynak var. Link burada: https://kendiyolu.com/articles/evde-bakilan-cicekler-bakim-ipuclari/
antoryum bitkisi hakk?ndaki makaleyi cok sevdim. Suradan okuyabilirsiniz: https://yappendik.com/articles/antoryum-cicegi-ozellikleri-bakim/
article source
https://russian-traditional-clothes.com/
“d?s cephe boyas? yesil tonlar?” konusu icin cok faydal? bir yaz? buldum. Kendiniz gorun: https://hobiseverler.com/articles/dis-cephe-boyasi-yesil-tonlari/
hop over to here
russian traditional clothing
try this website
russian traditional clothing
more
https://russian-traditional-clothes.com/
find here
https://russian-traditional-clothes.com
explanation
https://russian-traditional-clothes.com/
Bonuses
https://russian-traditional-clothes.com
Смотреть здесь Оземпик 1 мг 3мл аптеки в наличии
Главная https://tripsc65.cc/
маниикс официальный сайт вход t.me/moneyx_tg .
сюда https://krab6a.at
Смотреть здесь https://tripsc65.cc
сайт https://tripsc65.cc
Bu arada, eger bebek arabas? parca isimleri konusuyla ilgileniyorsan?z, suraya bir goz at?n. Suradan okuyabilirsiniz: https://toyshediye.com/articles/bebek-arabasi-parcalari-nereye-satilir/
“terlemek vucudumuz icin neden onemlidir” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Suradan okuyabilirsiniz: https://limitligiyin.com/articles/terlemenin-faydalari-fiziksel-psikolojik-etkileri/
продолжить https://krab6a.at/
смотреть здесь https://krab6a.at
cizimleri ayakkab?l?k olculeri hakk?ndaki bolumu cok sevdim. Kendiniz gorun: https://kendiyolu.com/articles/cizimler-ayakkabilik-olculeri-rehberi/
This resource is designed to help you discover interesting movies.Each selection includes posters, trailers, and direct links to streaming services,and the collections are structured around diverse topics.Recent titles are consistently added to keep the selection current.This approach streamlines your search by bringing together all necessary elements.You can find recommendations suited to your mood. https://cinepicker.com/
нажмите, чтобы подробнее https://tripsc65.cc
подробнее https://tripsc65.cc
?Levantemos nuestros brindis por cada explorador del futuro !
Los mejores casinos sin licencia en EspaГ±a pueden ofrecer software de alta calidad. Muchas veces utilizan plataformas de desarrolladores reconocidos para proporcionar una experiencia de juego inigualable. casinos online sin licencia. Sin embargo, el soporte al cliente puede ser deficiente en comparaciГіn con los operadores regulados.
Los mГ©todos de pago en los casinos sin licencia en EspaГ±a pueden ser limitados y menos seguros. Esto puede exponer a los jugadores a posibles fraudes y robos de identidad. Es esencial optar por mГ©todos de pago que ofrezcan mayor protecciГіn al usuario.
Las caras ocultas de los casinos online sin licencia – п»їhttps://puertadetoledo.es/casinos-sin-licencia-en-espana/
?Que la fortuna avance contigo con experiencias excepcionales beneficios brillantes !
For quick registration and access to your account, usearada bet appdirectly from your smartphone.
The platform ensures security through encryption methods safeguarding all personal and financial information.
“laminat parke boyas? varm?” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Link burada: https://evhobisi.com/articles/laminat-parke-boyasi-mumkun-mu/
“evde kar?nca neden c?kar” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Kendiniz gorun: https://fikirdronu.com/articles/evdeki-karincalari-ne-kacirir/
страница https://krab6a.at/
узнать больше https://krab6a.at/
Visit ramly888 online casino to experience exciting slot games and attractive bonuses.
Consequently, many users choose Ramly888 for its convenience.
подробнее https://krab6a.at
выберите ресурсы https://krab6a.at/
Discover the best gambling games with winspirit casino app download, to play anywhere and anytime.
The app boasts a quick and safe transaction process as one of its main advantages.
узнать https://tripsc65.cc/
Discover all the possibilities of
playboy888 download and enjoy a premium gaming experience with smooth performance, exciting gameplay, and nonstop entertainment. It aims to satisfy users who want engaging gameplay alongside potential high earnings.
взгляните на сайте здесь https://krab6a.at/
Узнать больше https://tripsc65.cc
подробнее https://kinogo.blue/zarubezhnye_serialy/611-pozharnye-chikago-2012-serial-s12.html
сайт https://kinogo.blue/filmy/2382-vse-radi-hita.html
Check This Out
ios app from website
ayakkab? turleri hakk?ndaki bolumu tavsiye ederim. Iste link: https://sporfikirleri.com/articles/spor-ayakkabi-cesitleri-secim-rehberi-trendler/
читать https://kinogo.blue/filmy/2522-shalun.html
Bu arada soyleyeyim, eger ahsap kupeste koctas konusuyla ilgileniyorsan?z, suraya bir goz at?n. Kendiniz gorun: https://kendihobim.com/articles/koctas-ahsap-kupeste-estetik-fonksiyonellik/
Смотреть здесь https://kinogo.blue/filmy/2497-parfyumer-istoriya-odnogo-ubiycy.html
best site
convert website to mobile app
this page
create android apk from website
посмотреть на этом сайте https://kinogo.blue/filmy-2025/2346-polnoe-issledovanie.html
this contact form
app monetization
посетить веб-сайт https://kinogo.blue/filmy-2025/1681-proryv.html
Источник https://kinogo.blue/filmy-2024g/1791-uchenik-tigra.html
перейдите на этот сайт https://kinogo.blue/filmy/2795-takie-raznye-bliznecy.html
official website
no-code app builder
anchor
app store distribution
browse around these guys
how to convert website to mobile app
Главная https://kinogo.blue/fantastika/
blog
app monetization
site here
ios app from website
ссылка на сайт https://kinogo.blue/filmy-2017/2072-shkola-monstrov-pod-napryazheniem.html
helpful hints
website wrapper app
why not try here
upload app google play store
this
webview app builder
посетить сайт https://kinogo.blue/fantastika/
кликните сюда https://kinogo.blue/filmy/1067-300-spartancev-rascvet-imperii.html
здесь https://kinogo.blue/russkye_serialy/
опубликовано здесь https://kinogo.blue/filmy/2738-poletta.html
подробнее здесь https://kinogo.blue/filmy-2025/2441-kogda-cvety-opadut-my-vstretimsya-vnov.html
visit this site right here
progressive web app alternative
Смотреть здесь https://kinogo.blue/filmy-2025/
anchor
turn website into app
our website app design customization
подробнее здесь https://kinogo.blue/filmy/1996-planeta-obezyan-voyna.html
узнать https://kinogo.blue/filmy/751-moja-kuzina-rjejchel-2017.html
why not try these out
mobile app development no code
Check Out Your URL
convert website to mobile app
Подробнее https://kinogo.blue/filmy/2379-katalizator.html
ссылка на сайт https://kinogo.blue/filmy-2017/2050-psihologini.html
Подробнее здесь https://kinogo.blue/filmy/2472-vremennaya-svyaz.html
important link
progressive web app alternative
зайти на сайт https://kinogo.blue/filmy/2522-shalun.html
веб-сайт https://kinogo.blue/filmy/1735-sluzhba-dostavki-knig.html
посетить веб-сайт https://kinogo.blue/filmy/1103-vrag-gosudarstva.html
browse around this website
convert website to mobile app
взгляните на сайте здесь https://kinogo.blue/filmy-2017/451-genij.html
Читать далее https://kinogo.blue/filmy/2272-yunye-syschiki-delo-ob-ischeznuvshih-schenkah.html
Следующая страница https://kinogo.blue/filmy/2608-zheleznyy-chelovek-2.html
this link app monetization
go to this site
app store distribution
интернет https://kinogo.blue/filmy-2017/1943-ulica.html
you can find out more
best no-code app builder
try this web-site
mobile app development no code
go now
website wrapper app
зайти на сайт https://kinogo.blue/fantastika/
Подробнее здесь https://kinogo.blue/zarubezhnye_serialy/95-spartak-bogi-areny.html
перенаправляется сюда https://kinogo.blue/filmy-2025/2367-samaya-schastlivaya-semya.html
интернет https://kinogo.blue/filmy/1959-malysh-na-drayve.html
sites
app design customization
перейти на сайт https://kinogo.blue/filmy/2263-ukus-realnosti-rassledovanie-hanny-svensen.html
нажмите https://kinogo.blue/filmy/1969-madam.html
this hyperlink best no-code app builder
their explanation
upload app google play store
Смотреть здесь https://kinogo.blue/filmy/682-narkokurer.html
перейдите на этот сайт https://kinogo.blue/filmy-2017/2051-chudotvornaya.html
выберите ресурсы https://kinogo.blue/filmy/2788-centurion.html
Перейти на сайт https://kinogo.blue/filmy-2025/2271-vedma.html
reference
create android apk from website
Bu arada soyleyeyim, eger uzun sacl? futbolcular konusuyla ilgileniyorsan?z, suraya bak?n. Link burada: https://takimgiyim.com/articles/futbolcu-uzun-sac-modelleri/
en dusuk kalorili ekmek hakk?ndaki yaz?y? gercekten begendim. Suradan okuyabilirsiniz: https://sporfikir.com/articles/kalorisi-dusuk-ekmek-saglikli-beslenme-alternatifleri/
посетить сайт https://kinogo.blue/filmy/2603-zabavnye-igry.html
why not look here
ios app from website
“reebok nerenin” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Link burada: https://atletikgiyim.com/articles/reebok-hangi-ulkenin-markasi/
узнать больше Здесь https://kinogo.blue/fantastika/
his explanation
customize app design
этот сайт https://kinogo.blue/filmy/2179-gorod-demonov.html
discover here
app store distribution
здесь https://kinogo.blue/filmy/2115-uletnye-devochki.html
here are the findings
upload app google play store
взгляните на сайте здесь https://kinogo.blue/filmy-2025/2146-leopard.html
check my site
no-code app builder
пояснения https://kinogo.blue/filmy-2024g/1835-akolit.html
look what i found
push notifications mobile
check that
progressive web app alternative
посмотреть на этом сайте https://kinogo.blue/filmy/1244-forsazh-10-2023-film-dub-kino.html
browse around this website
app store distribution
подробнее https://kinogo.blue/filmy-2025/2225-ostrov-sokrovisch.html
содержание https://kinogo.blue/filmy-2017/1949-tma.html
read what he said
app store distribution
продолжить https://kinogo.blue/filmy/2631-diktator.html
check this
android app from website
click to read more
best no-code app builder
Our site
push notifications mobile
this content
mobile app wrapper
выберите ресурсы https://kinogo.blue/fantastika/
Going Here
website wrapper app
можно проверить ЗДЕСЬ https://kinogo.blue/fantastika/
basics
create apk from website free
try this
best no-code app builder
подробнее https://kinogo.blue/filmy-2024g/1787-magazin-svetilnikov.html
нажмите здесь https://kinogo.blue/filmy/2235-marshrutnyy-list.html
continue reading this
website to app converter
over here
turn website into app
visit this website
upload app to google play console
over at this website
app monetization
look at more info
app design customization
Смотреть здесь https://kinogo.blue/filmy/2035-molodye-kopy.html
Главная https://kinogo.blue/filmy/2751-povorot-ne-tuda-5-krovnoe-rodstvo.html
посетить сайт https://kinogo.blue/filmy/2780-pandorum.html
recommended you read
create android apk from website
перейдите на этот сайт https://kinogo.blue/filmy/2553-vozvrat.html
посетить сайт https://kinogo.blue/filmy/1281-krepkij-oreshek-3-vozmezdie.html
проверить сайт https://kinogo.blue/filmy-2025/2294-tihaya-gavan.html
читать https://kinogo.blue/filmy/1032-nichego-horoshego-v-otele-jel-rojal.html
browse around this web-site
turn website into app
dig this google play console closed testing
imp source
webview app builder
yagl? boya kac saatte kurur hakk?ndaki bolumu cok sevdim. Iste link: https://yappendik.com/articles/yagli-boya-kuruma-surecleri-sicak-soguk/
populer oyuncak hakk?ndaki bolumu tavsiye ederim. Link burada: https://toyshediye.com/popular-toy-brands/
hop over to this site https://binunlock.com/tuning-files/categories/jcb.88/
see page https://binunlock.com/tuning-files/bmw-535i-f10-f11-mevd17-2-g-tuning-file-pop-bang-sport.8/
Bu arada, eger at?k malzemeden tasar?mlar konusuyla ilgileniyorsan?z, buray? inceleyin. Link burada: https://kendimacera.com/articles/atik-malzemeden-yaratici-projeler-fikirler/
Bu arada, eger cat? kat? teras mutfak modelleri konusuyla ilgileniyorsan?z, suraya bak?n. Kendiniz gorun: https://hobiyapma.com/articles/cati-kati-teras-mutfak-modelleri/
informative post https://binunlock.com/resources/crash-data-resetter-srs-eeprom-repair-for-vag-peugeot.207/
Learn More Here https://binunlock.com/resources/forscan-2-3-48-key-full-advanced-diagnostics-for-ford-mazda.95/
wikipedia reference https://binunlock.com/resources/
check here https://binunlock.com/tuning-files/categories/daf.17/
wikipedia reference https://binunlock.com/tuning-files/categories/toyota.72/
Home Page https://binunlock.com/tuning-files/
visit this site https://binunlock.com/resources/bimmerutility-bmw-mini-coding-diagnostics.216/
visit their website https://binunlock.com/resources/
see it here https://binunlock.com
here are the findings https://binunlock.com/resources/bincompare-lightweight-binary-diff-viewer-for-firmware-roms.192/
get more https://binunlock.com/resources/msv80-reseter-fix-incorrect-variant-error.40/
i thought about this https://binunlock.com/tuning-files/categories/bmw.8/
try here https://binunlock.com/resources/komatsu-time-instrument-cluster-hour-meter-tool.145/
Click Here https://binunlock.com/tuning-files/categories/seat.66/
you could check here https://binunlock.com/resources/categories/vag-group-diagnostic-coding-software.12/
look at these guys https://binunlock.com/resources/categories/vag-group-diagnostic-coding-software.12/
additional hints https://binunlock.com/resources/instacode-data-v9231-full-locksmith-code-database.104/
Look At This https://binunlock.com/resources/bmw-cas-eeprom-creator-recover-lost-cas-1-4-data.31/
official statement https://binunlock.com/tuning-files/bmw-x5-3-0i-e70-msv7x-0049qk0mi20smao1s-tune-siemens-tricore-partial-map-file.150/
Experience thrilling gameplay and rewarding moments with 777bet online casino, where each spin brings fresh excitement and new possibilities to win.
With a vast selection of sports including football, basketball, tennis, and others, 777bet offers extensive betting possibilities.
click resources https://binunlock.com/resources/bmw-aisin-egs-resetter-f39-f48-isn-reset.47/
Learn More https://binunlock.com/resources/hpt-to-bin-converter-export-compare-hex-view-hp-tuners-files.162/
More hints https://binunlock.com/resources/real-sirius-32-immo-cleaner.91/
“kahverengi pimapen balkon kapatma” konusu icin burada harika bilgiler var. Iste link: https://projesahibi.com/articles/kahverengi-pimapen-balkon-kapatma-rehberi/
diyet ekmek cesitleri hakk?ndaki bolumu gercekten begendim. Suradan okuyabilirsiniz: https://enerjiatlet.com/articles/diyet-ekmekleri-saglikli-beslenme-secenekleri/
Full Article https://binunlock.com/resources/inpa-64-bit-with-enet-support-for-e-f-g-series.76/
see https://binunlock.com/tuning-files/
site https://binunlock.com
check out here https://binunlock.com
this website https://binunlock.com/resources/msv80-reseter-fix-incorrect-variant-error.40/
you could try here https://binunlock.com/resources/unlock-dme-edc-flashing-with-e-sys-patched-btld-files.72/
reference https://binunlock.com/tuning-files/
look at more info https://binunlock.com
нейросеть для рефератов онлайн бесплатно без регистрации
her explanation https://binunlock.com/tuning-files/categories/daf.17/
linked here https://binunlock.com/resources/motoscan-for-bmw-motorcycles-diagnostics-service-ultimate.220/
hop over to this site https://binunlock.com/resources/sa-option-helper-winkfp-zusb-finder.58/
site https://binunlock.com/tuning-files/categories/daf.17/
go to my site https://binunlock.com/resources/categories/ecu-immo-security-code-utilities.8/
look at this web-site https://binunlock.com/tuning-files/categories/komatsu.84/
next https://binunlock.com/tuning-files/categories/mazda.53/
resource https://binunlock.com/tuning-files/categories/volvo.75/
Нейросети для рефератов https://neyroseti-dlya-referatov.ru/
Australian Online Casino Legit Safety Check
web link https://binunlock.com/resources/iprog-pro-v89-all-versions-software-pack-v43-to-v89-ultimate-collection.101/
check my source https://binunlock.com/tuning-files/categories/nissan.58/
click here to read https://binunlock.com/tuning-files/categories/man.25/
Website https://binunlock.com/resources/ecus-prog-v1-full-automotive-repair-pinout-database.103/
my latest blog post https://binunlock.com/resources/e70-e71-8hp-egs-reset-winkfp-method.63/
visit the website https://binunlock.com/tuning-files/categories/peugeot.60/
Visit Your URL https://binunlock.com/resources/
great post to read https://binunlock.com/resources/manually-replacing-isn-in-mg1-md1-ecus-via-eeprom.50/
Bu arada, eger renklerin anlamlar? k?saca konusuyla ilgileniyorsan?z, suraya bir goz at?n. Iste link: https://yapevleri.com/articles/renklerin-psikolojik-anlami/
нейросеть для написания реферата бесплатно без регистрации
have a peek at this site https://binunlock.com/resources/cas3-c4-editor-repair-isn-repair-tool.19/
take a look at the site here https://binunlock.com/resources/categories/ecu-eeprom-programmers.9/
browse around this web-site https://binunlock.com/resources/daf-davie-developer-tool-programming-password-calculator.125/
check these guys out https://binunlock.com/tuning-files/categories/honda.92/
find this https://binunlock.com/resources/
navigate to this site https://binunlock.com/tuning-files/categories/renault.63/
нейросеть для написания рефератов
нейросеть для написания рефератов бесплатно онлайн
look at this now https://binunlock.com/resources/vag-flash-data-files-service42-full-archive.85/
visit homepage https://binunlock.com/tuning-files/
Best Pokies Australia Real Money Feel The Jackpot Rush Now
Online Casino Real Money Australia Real Break Free With Millions
read here https://binunlock.com/resources/winols-4-70-01-download-no-vm-no-date-change-bug-fixed.2/
official website https://binunlock.com/tuning-files/categories/audi.6/
No Deposit Bonus Real Money Australia Claim Your Free Rush
Australian Online Casino Real Money Massive Real Payout Calling
get more https://binunlock.com/tuning-files/
Оформили 10 машин одноhttps://eit.engineers.scot/index.php/User:CliffordBennerременно без задержек
Нейросети для рефератов https://neyroseti-dlya-referatov.ru/
Discover the excitement and win big with exclusive bonuses at fairspin promo code.
With the integration of blockchain technology, the platform allows players to verify the fairness of every game outcome seamlessly.
Crypto Pokies Real Money Australia Your Real Fortune Builder
Перейти на сайт
New retro casino промокод при регистрации
каталог
Бонусы за регистрацию с промокодом Win777
подробнее
Приветственные бонусы по промокоду Leon
узнать больше Здесь
Clubnika casino промокод при регистрации
“otomatik duduklu tencere kullan?m?” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Iste link: https://kendihobim.com/articles/elektrikli-duduklu-tencere-kullanimi/
этот сайт
Бонусы за регистрацию с промокодом казино 1go
Узнать больше
Kent casino промокод при регистрации
можно проверить ЗДЕСЬ
Бонусы за регистрацию с промокодом Мелбет
Подробнее здесь
Jozz casino промокод при регистрации
посмотреть в этом разделе
Приветственные бонусы по промокоду Play Fortuna
нажмите здесь
Баунти казино промокод
Узнать больше
Аркада казино промокод
Главная
Бонусы за регистрацию с промокодом Мелбет
нейросеть для создания рефератов в ворде
Читать далее
Monro casino код активации
посмотреть на этом сайте
Хани мани казино промокод
нейросеть для генерации текста реферат
нейросеть для генерации текста реферат
выберите ресурсы
Бабосс промокод
узнать больше
Приветственные бонусы по промокоду Casino7
нажмите здесь
Приветственные бонусы по промокоду Leebet
посетить веб-сайт
Spinbetter промокод при регистрации
узнать больше Здесь
Приветственные бонусы по промокоду Бет Бум
взгляните на сайте здесь
Fastpari промокод при регистрации
здесь
Vegas Legacy casino промокод при регистрации
Продолжение
Приветственные бонусы по промокоду казино R7
узнать больше
GetX промокод бонусы на депозит
в этом разделе
888starz промокод
здесь
Приветственные бонусы по промокоду Покердом
узнать
Приветственные бонусы по промокоду казино Slott
Real money pokies Australia – best sites to play and win
Top 10 Online Casino Australia Ranked High
Следующая страница
Приветственные бонусы по промокоду Vegas grand casino
посмотреть на этом сайте
Jetton casino промокод бонусы на депозит
Перейти на сайт
Cryptoboss промокод бонусы на депозит
перейдите на этот сайт
Honey money casino промокод при регистрации
такой
Cat casino промокод при регистрации
интернет
Бонусы за регистрацию с промокодом казино 1go
https://aracimiyenile.com/
“hediyelik kitap ayrac? yap?m?” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Iste link: https://kendihobim.com/articles/hediyelik-kitap-ayraci-yapimi/
нейросеть для написания реферата бесплатно
仿佛电影画面。 A detailed explanation is available at 好高级的审美。.
Если вы ищете качественный детейлинг салона авто, обратитесь к нашим профессионалам.
В итоге машина приобретает обновлённый и ухоженный вид.
Благодаря полировке транспортное средство выглядит как новое.
Если вы ищете детейлинг салона автомобиля, наш сервис предлагает профессиональный уход и восстановление вашего автомобиля на высшем уровне.
Затем используются специальные защитные средства для поддержания эффекта полировки.
terrex ne demek hakk?ndaki yaz?y? gercekten begendim. Link burada: https://dinamizsport.com/articles/adidas-terrex-spor-ayakkabi-estetik-performans/
terrex ne demek hakk?ndaki yaz?y? tavsiye ederim. Kendiniz gorun: https://sportmodu.com/articles/adidas-terrex-ayakkabi-incelemesi/
situs dolly4d
“ayse y?ld?r?m” konusu icin mukemmel bir kaynak var. Link burada: https://yapevleri.com/authors/ayse-yildirim/
cat? kat? teras mutfak modelleri hakk?ndaki bolumu gercekten begendim. Suradan okuyabilirsiniz: https://hobiyapma.com/articles/cati-kati-teras-mutfak-modelleri/
Bu arada, eger mutfak malzemeleri listesi konusuyla ilgileniyorsan?z, buray? inceleyin. Kendiniz gorun: https://kendihobim.com/articles/mutfak-arac-gerecleri-listesi-temel-malzemeler/
look at here https://seenfil.com
Услуги таможенного брокера Москва действительно стоят своих денег
Here is my page https://git.autotion.net/helainemehaffe
dinozor cesitleri hakk?ndaki bolumu cok sevdim. Kendiniz gorun: https://renklioyun.com/articles/dinozor-cinsleri-turlerin-cesitliligi/
content https://seenfil.com/
here https://seenfil.com
site https://seenfil.com
check my source https://seenfil.com
over here https://seenfil.com/
Extra resources https://seenfil.com/
this website https://seenfil.com
additional hints https://seenfil.com/
Таможенный представитель Москва вызывает доверие
My blog post: https://www.realchoiceproperty.com/author/vernchappel892/
Read More Here https://seenfil.com/
Source https://seenfil.com/
go to this site https://seenfil.com
click here for info https://seenfil.com
why not try here https://seenfil.com/
browse around here https://seenfil.com
this page https://seenfil.com/
why not check here https://seenfil.com
reference https://seenfil.com/
click here to read https://seenfil.com/
see this site https://seenfil.com
look what i found https://seenfil.com/
Try your luck in an exciting gamehades zeus slot and find out which god will win this battle!
The rewarding payout system of this slot draws considerable attention.
otdat-buhgalteriyu-na-autsorsing-495.ru .
check these guys out https://seenfil.com/
read this https://seenfil.com/
more info here https://seenfil.com/
“maydanoz hangi ayda ekilir” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Link burada: https://kendihobim.com/articles/maydanoz-ne-zaman-ekilir/
look at this web-site https://seenfil.com/
next https://seenfil.com
Bu arada, eger evde kol hareketleri konusuyla ilgileniyorsan?z, suraya bir goz at?n. Link burada: https://takimgiyim.com/articles/evde-kol-hareketleri-egzersiz-taktikler/
Bu arada soyleyeyim, eger aloe vera cicek acmas? ne anlama gelir konusuyla ilgileniyorsan?z, buray? inceleyin. Link burada: https://yapevleri.com/articles/aloe-vera-cicegi-acma-sureci-ve-ipuclari/
her explanation https://seenfil.com
Bonuses https://seenfil.com/
my website https://seenfil.com/
click this https://seenfil.com/
see this https://seenfil.com/
address https://seenfil.com/
Если вы ищете детейлинг салона автомобиля, наш сервис предлагает профессиональный уход и восстановление вашего автомобиля на высшем уровне.
Выбирая детейлинг центр, вы обеспечиваете своему автомобилю профессиональное обслуживание.
Если вы ищете качественный детейлинг химчистка салона, обратитесь к нашим профессионалам.
Процесс требует особой аккуратности и использования профессионального оборудования.
Процесс требует особой аккуратности и использования профессионального оборудования.
Visit Website https://seenfil.com
check my blog https://seenfil.com
Check Out Your URL https://seenfil.com
about his https://seenfil.com
additional reading https://seenfil.com/
check my site https://seenfil.com
Click This Link https://seenfil.com/
he said https://seenfil.com
Bu arada, eger evde m?rra nas?l yap?l?r konusuyla ilgileniyorsan?z, suraya bak?n. Link burada: https://kendifikirler.com/articles/evde-mirra-yapma-rehberi/
click to read more https://seenfil.com/
Ayr?ca, eger boyas? c?kan kumasa ne yapmal? konusuyla ilgileniyorsan?z, buray? inceleyin. Suradan okuyabilirsiniz: https://yapevleri.com/articles/kumas-kurumus-boya-lekesi-cikarma-yontemleri/
navigate to this site https://seenfil.com/
Experience thrilling gameplay and rewarding moments with 777bet online casino, where each spin brings fresh excitement and new possibilities to win.
Bonuses and promotions are central to 777bet’s strategy for engaging and rewarding its user base.
этот контент kraken зеркало
Смотреть здесь кракен магазин в даркнете
Try your luck and win big withsurewin.
Among its many strengths, the casino offers an easy-to-navigate experience along with numerous gaming options.
посетить сайт гидра официальный сайт
ссылка на сайт сайт продаж
Подробнее здесь зеркало на замену гидры
узнать больше omgomg ссылка сайта
morun tonlar? hakk?ndaki makaleyi cok sevdim. Link burada: https://hobielyazma.com/articles/mor-rengi-tonlari-inceleme/
“camdan silikon nas?l c?kar” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Kendiniz gorun: https://kendihobim.com/articles/silikon-camdan-nasil-cikar/
опубликовано здесь mega darknet market
Узнать больше даркнет сайты
сайт weeedcat или weedcat
посетить веб-сайт ссылка на сайт blacksprut
подробнее здесь omgomg ссылка сайта
Источник гидра официальный сайт
otdat-buhgalteriyu-na-autsorsing-495.ru .
перейти на сайт кракен официальная ссылка на сайт
“krampon nedir” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Kendiniz gorun: https://sporfikirleri.com/articles/krampon-fiyatlari-ve-secenekleri/
Ayr?ca, eger bulas?k makinesi olculeri konusuyla ilgileniyorsan?z, suraya bir goz at?n. Link burada: https://projesahibi.com/articles/bulasik-makinesi-boyutlari-ve-dogru-secim-yontemleri/
интернет omgomg ссылка сайта
Узнать больше блекспрут официальное зеркало
зайти на сайт kraken зеркало
можно проверить ЗДЕСЬ omgomg ссылка сайта
веб-сайт гидра официальный сайт
подробнее здесь darknet
нажмите здесь mega darknet market
веб-сайте гидра официальный сайт
на этом сайте блекспрут официальное зеркало
“eldeki boya nas?l c?kar” konusu icin mukemmel bir kaynak var. Link burada: https://kendihobim.com/articles/eldeki-boya-nasil-cikar/
Узнать больше bs2best at обход блокировки
интернет мега даркнет
зайти на сайт блекспрут официальное зеркало
посмотреть в этом разделе ссылки на аналоги гидры
здесь кракен магазин в даркнете
“en cok cinko iceren besinler” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Iste link: https://sporfikirleri.com/articles/cinko-iceren-besinler-saglik-etkileri/
посмотреть в этом разделе blsp at как зайти
пояснения магазин black sprut
пояснения mega darknet market
здесь omgomg ссылка сайта
Смотреть здесь omgomg официальное зеркало
этот контент блекспрут официальное зеркало
выберите ресурсы зеркало на замену гидры
страница darknet
Источник mega darknet market
Смотреть здесь магазин black sprut
посетить сайт кракен магазин в даркнете
https://viyanauniversitesi.com.tr/
проверить сайт omgomg ссылка сайта
посетить сайт darknet
“skechers kombinleri” konusu icin burada harika bilgiler var. Kendiniz gorun: https://atletikhayal.com/articles/skechers-kombinleri-stil-rahatlik-secenekler/
найти это weeedcat или weedcat
подробнее гидра официальный сайт
этот контент список ссылок на сайты в даркнете
Кстати, если вас интересует самая высокая гора в крыму, посмотрите сюда. Вот, можете почитать: https://travelcrimea.ru/%D1%81%D0%B0%D0%BC%D1%8B%D0%B5-%D0%B2%D1%8B%D1%81%D0%BE%D0%BA%D0%B8%D0%B5-%D0%B3%D0%BE%D1%80%D1%8B-%D0%BA%D1%80%D1%8B%D0%BC%D0%B0-%D0%B3%D0%B4%D0%B5-%D0%BD%D0%B0%D1%85%D0%BE%D0%B4%D0%B8%D1%82%D1%81/
Кстати, если вас интересует отель в выборгском районе, гляньте сюда. Вот, делюсь ссылкой: https://spb-hotels.ru/%D0%BB%D1%83%D1%87%D1%88%D0%B8%D0%B5-%D0%BE%D1%82%D0%B5%D0%BB%D0%B8-%D0%B2%D1%8B%D0%B1%D0%BE%D1%80%D0%B3%D1%81%D0%BA%D0%BE%D0%B3%D0%BE-%D1%80%D0%B0%D0%B9%D0%BE%D0%BD%D0%B0-%D1%81%D0%B0%D0%BD%D0%BA/
“en cok aranan oyuncaklar” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Suradan okuyabilirsiniz: https://sevimlioyunlar.com/toy-reviews/liked-toy-rankings/
hot wheels ne demek hakk?ndaki yaz?y? tavsiye ederim. Suradan okuyabilirsiniz: https://toyshayal.com/articles/hot-wheels-arac-kulturu-incelemesi/
здесь omgomg ссылка сайта
Смотреть здесь список ссылок на сайты в даркнете
опубликовано здесь список ссылок на сайты в даркнете
веб-сайте магазин black sprut
можно проверить ЗДЕСЬ omgomg ссылка сайта
Читать далее мега даркнет
нажмите здесь darknet
нейросеть для рефератов бесплатно
Ayr?ca, eger f?r?n tavan? nas?l temizlenir konusuyla ilgileniyorsan?z, buray? inceleyin. Suradan okuyabilirsiniz: https://evhobileri.com/articles/firin-tavani-nasil-temizlenir/
Look At This
russian traditional clothing
реферат нейросеть для студентов бесплатно
Для надежной защиты воды от загрязнений идеально подойдет купол для бассейна купить каркасного 366.
Существует несколько типов тентов, включая пленочные, тканевые и надувные модели.
Discover the rejuvenating effects of miracle l for effective mesotherapy injections that enhance your skin’s vitality and glow.
Sessions typically range from 30 to 60 minutes, with minor side effects such as mild redness or swelling.
Если хотите качественно и быстро вернуть блеск вашему автомобилю, обращайтесь в детейлинг цена, где профессионалы обеспечат вашему авто безупречный вид.
В завершение специалисты применяют защитные составы и проводят глубокую уборку внутри автомобиля.
Защитные материалы помогают продлить срок службы лакокрасочного покрытия и предотвратить выгорание.
нейросеть для написания рефератов бесплатно
site here
russian traditional clothing
“feng shui tablo secimi” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Suradan okuyabilirsiniz: https://yappendik.com/articles/feng-shui-tablo-secimi-enerji-akisi/
“lego cesitleri” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Suradan okuyabilirsiniz: https://toyshikaye.com/articles/lego-cesitleri-cocuk-gelisimi/
If you’re looking for an exciting challenge, try playing king thimbles game today!
Using a king thimble properly can greatly improve sewing efficiency.
weblink
russian traditional clothing
Ayr?ca, eger mor mutfak dekorasyonu konusuyla ilgileniyorsan?z, suraya bir goz at?n. Kendiniz gorun: https://kendimacera.com/articles/mor-mutfak-dekorasyonu-modern-yaklasimlar/
Learn More
https://russian-traditional-clothes.com/
internet
https://russian-traditional-clothes.com
Bu arada, eger puma duz taban konusuyla ilgileniyorsan?z, suraya bak?n. Suradan okuyabilirsiniz: https://oyungiyimleri.com/articles/puma-duz-taban-ayakkabi-incelemesi/
“kuyruksuz hayvanlar” konusu icin mukemmel bir kaynak var. Link burada: https://renklioyun.com/articles/kuyrugu-olmayan-hayvanlar/
find
https://russian-traditional-clothes.com/
her latest blog
russian traditional clothing
This content is well-organized and easy to understand. It really helped me a lot.
Если вы ищете надежное и эффективное оборудование для занятий спортом, обратите внимание на силовой тренажер верхняя тяга на сайте SportRes — здесь вы найдете все необходимое для эффективных тренировок.
Выбор подходящего блока напрямую влияет на качество и безопасность занятий.
Если вы хотите улучшить свою тренировку, обратите внимание на грузоблочный тренажер для пресса — это идеальное решение для создания эффективной и разнообразной программы тренировок.
Своевременный уход за блоками тренажеров помогает сохранить их функциональность на долгие годы.
Для эффективной тренировки мышц ног рекомендуем обратить внимание на рычажный тренажер для ног, который обеспечивает максимальную нагрузку и удобство в использовании.
В заключение стоит отметить, что рычажный тренажер – это универсальный и эффективный инструмент для тренировки ног.
Bu arada, eger bornozlar hangi programda y?kan?r konusuyla ilgileniyorsan?z, buray? inceleyin. Link burada: https://hobiprojesi.com/articles/bornozlari-nasil-yikanir/
“caml? kap? boyama eski tip oda kap?lar? nas?l yenilenir” konusu icin cok faydal? bir yaz? buldum. Suradan okuyabilirsiniz: https://projesahibi.com/articles/eski-oda-kapilari-yenileme/
Ayr?ca, eger zumrut yesili hangi renkle uyumlu konusuyla ilgileniyorsan?z, suraya bir goz at?n. Kendiniz gorun: https://hobiprojesi.com/articles/zumrut-yesili-uyumlu-renkler/
“hot wheels ne demek” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Link burada: https://toyshikaye.com/articles/hot-wheels-cocuklar-ve-koleksiyonerlere-etkisi/
Ayr?ca, eger sunger nas?l kesilir konusuyla ilgileniyorsan?z, suraya bak?n. Iste link: https://yappendik.com/articles/kalin-sunger-nasil-kesilir/
Bu arada, eger gri renk olusumu konusuyla ilgileniyorsan?z, suraya bir goz at?n. Suradan okuyabilirsiniz: https://fikirdronu.com/articles/gri-renk-hangi-renklerle-olusur/
Your blog has become my go-to source for inspiration and motivation I am so grateful for the valuable content you provide
“trapez kas” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Link burada: https://takimgiyim.com/articles/trapez-kasi-gorevi-onemi/
evden sat?s siteleri hakk?ndaki yaz?y? cok sevdim. Suradan okuyabilirsiniz: https://yappendik.com/articles/evden-satis-yapma-yontemleri-ipuclari/
aviator game online offers an exciting experience and the opportunity to win real money directly from your device.
The experience of seeing the multiplier ascend is incredibly exciting for players.
Попробуйте свои силы в лучших играх на alpha66 live и почувствуйте настоящий азарт прямо сейчас!
The platform supports a variety of customizable options, allowing users to tailor their experience according to personal preferences.
Bu arada, eger yuka cicegi hastal?klar? konusuyla ilgileniyorsan?z, buray? inceleyin. Suradan okuyabilirsiniz: https://hobiprojesi.com/articles/yuka-cicegi-yaprak-sararmasi-nedenler-cozumler/
zay?flamak icin spor hareketleri hakk?ndaki makaleyi gercekten begendim. Iste link: https://sporfikirleri.com/articles/evde-zayiflama-hareketleri-kilo-verme/
slazenger nerenin mal? hakk?ndaki makaleyi cok sevdim. Kendiniz gorun: https://bedensport.com/articles/slazenger-markasi-tarihce-ve-spor-endustrisi/
12 yas erkek sac modelleri hakk?ndaki yaz?y? gercekten begendim. Suradan okuyabilirsiniz: https://oyunvadi.com/articles/oniki-yas-erkek-cocuk-sac-modelleri/
Ayr?ca, eger fayans doseme puf noktalar? konusuyla ilgileniyorsan?z, suraya bak?n. Iste link: https://evhobileri.com/articles/fayans-doseme-nasil-yapilir-adim-adim-kilavuz/
Узнать больше https://t.me/invisevpn_bot/
Your blog has helped me become a more positive and mindful person I am grateful for the transformative effect your words have had on me
кликните сюда Unique products for you!
Смотреть здесь Georgia: quality comes first!
читать
Не забывайте о себе!
Главная https://t.me/invisevpn_bot
интернет https://t.me/invisevpn_bot/
посмотреть на этом сайте All the best is here!
здесь https://t.me/invisevpn_bot
посмотреть на этом сайте Путешествие, которое стоит пройти!
продолжить https://t.me/invisevpn_bot/
найти это
Georgia: Your Ideal Market!
страница В Грузии каждый момент ценен!
посетить сайт https://t.me/invisevpn_bot/
опубликовано здесь https://t.me/invisevpn_bot/
Bu arada, eger sunger nas?l kesilir konusuyla ilgileniyorsan?z, suraya bir goz at?n. Suradan okuyabilirsiniz: https://yappendik.com/articles/kalin-sunger-nasil-kesilir/
ссылка на сайт
Испытайте радость в каждой поездке!
узнать больше Здесь Ваш комфорт — наш приоритет!
Подробнее здесь https://t.me/invisevpn_bot
выберите ресурсы https://t.me/invisevpn_bot/
узнать больше Здесь
Georgia is your perfect choice!
посетить веб-сайт https://t.me/invisevpn_bot
перейти на сайт Каждый день — новое открытие!
узнать больше Здесь
All the best is here!
подробнее https://t.me/invisevpn_bot
страница Казахстан: уникальные приключения ждут!
нажмите здесь Впечатления, которые запоминаются!
опубликовано здесь https://t.me/invisevpn_bot
взгляните на сайте здесь https://t.me/invisevpn_bot/
Подробнее Путешествие, которое стоит пройти!
проверить сайт
Отдых с душой в РБ!
перенаправляется сюда
Unique products for you!
интернет Уникальные товары только сейчас!
веб-сайте
Ваш путь к незабываемым мгновениям.
смотреть здесь https://t.me/invisevpn_bot
перейти на сайт https://t.me/invisevpn_bot
ссылка на сайт Могилев: отдых для души.
Подробнее здесь Откройте Грузию — удивляйтесь!
Узнать больше
Загляните в мир этих товаров!
здесь Georgia: Your Ideal Market!
содержание https://t.me/invisevpn_bot/
“etamin kap? susu sablonlar?” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Iste link: https://hobiprojesi.com/articles/etamin-kapi-susu-sablonlari-yaratici-fikirler/
Источник https://t.me/invisevpn_bot
Читать далее
Unique finds in Tbilisi!
Подробнее здесь
Путешествие, которое стоит пройти!
другие https://t.me/invisevpn_bot
Перейти на сайт Каждый день — новое открытие!
взгляните на сайте здесь Время для самореализации с нами!
Перейти на сайт https://t.me/invisevpn_bot/
можно проверить ЗДЕСЬ Откройте лучшую версию себя!
на этом сайте Эмоции на каждом шагу!
Смотреть здесь
Празднуйте каждый момент жизни!
кликните сюда https://t.me/invisevpn_bot/
можно проверить ЗДЕСЬ https://t.me/invisevpn_bot/
смотреть здесь Georgia is your perfect choice!
зайти на сайт
Откройте сердце Грузии!
нажмите https://t.me/invisevpn_bot
Смотреть здесь
The best for every day!
посмотреть в этом разделе
All the best is here!
узнать больше Здесь
Путешествие, которое стоит пройти!
Go to our updated platform : https://jinding.fr/wp-content/pgs/le_meilleur_code_promo_3.html
Bu arada soyleyeyim, eger orjinal forma nas?l anlas?l?r konusuyla ilgileniyorsan?z, suraya bir goz at?n. Suradan okuyabilirsiniz: https://sporfikirleri.com/articles/orijinal-forma-nasil-alinir/
Discover what’s new : http://uzcm.ru/images/pages/1xbet_promokod__1.html
Your comment is a great example of thoughtful feedback. You raised excellent points, explained them clearly, and made the conversation richer and more interesting. I really appreciate your perspective on the topic!-mayanempireslotgame
Ayr?ca, eger mor rengin anlam? konusuyla ilgileniyorsan?z, buray? inceleyin. Kendiniz gorun: https://hobiprojesi.com/articles/mor-rengin-anlami-ve-etkileri/
Your method of describing the whole thing in this paragraph is in fact nice, every one can effortlessly know it, Thanks a lot.
Если вы хотите повысить безопасность и удобство маневрирования, рекомендуем камера заднего вида для коммерческого транспорта.
Также нужно обеспечить надежное крепление и защиту камеры от пыли и влаги.
Для обеспечения максимальной безопасности на дороге рекомендуем приобрести камера заднего вида на грузовик.
Монтаж камеры заднего вида должен выполняться с учётом особенностей грузового транспорта.
Bu arada, eger bagc?ks?z krampon konusuyla ilgileniyorsan?z, buray? inceleyin. Kendiniz gorun: https://sporatelier.com/articles/bagciksiz-krampon-adidas-inovasyon-performans/
“eldeki japon yap?st?r?c?s? nas?l c?kar” konusu icin cok faydal? bir yaz? buldum. Iste link: https://kendiyolu.com/articles/japon-yapistiricisini-elden-cikarma/
s?v? cam elden nas?l c?kar hakk?ndaki bolumu gercekten begendim. Link burada: https://kendihobim.com/articles/sivi-cam-elden-nasil-cikar/
Приветствую форумчан.
Нарыл полезную тему.
Может кому пригодится.
Линк:
kraken актуальные ссылки
Всем удачи!
Здарова народ!
Наткнулся на интересную информацию.
Думаю, многим будет полезно.
Подробности здесь:
kraken сайт
Мне зашло.
Доброго времени суток.
Увидел интересную тему.
Советую глянуть.
Линк:
kraken рабочая ссылка onion
Всем удачи!
Приветствую форумчан.
Увидел полезную статью.
Решил поделиться.
Вот ссылка:
кракен даркнет маркет
Пользуйтесь на здоровье.
Здарова народ!
Наткнулся на годную тему.
Решил поделиться.
Вот ссылка:
kraken маркетплейс зеркало
Мне зашло.
Всем привет!
Наткнулся на полезную тему.
Может кому пригодится.
Линк:
актуальные зеркала kraken
Как вам?
Bu arada, eger slazenger turk mal? m? konusuyla ilgileniyorsan?z, suraya bak?n. Link burada: https://sporfikirleri.com/articles/slazenger-markasi-turkiyede-yerli-mi/
yer fayans boyama hakk?ndaki yaz?y? cok sevdim. Suradan okuyabilirsiniz: https://yapevleri.com/articles/yer-fayansi-boyama-evde-projeler/
Приветствую форумчан.
Нарыл полезную информацию.
Думаю, многим будет полезно.
Линк:
кракен онион зеркало
Вроде норм.
entrenamiento para personas
Приветствую форумчан.
Нашел интересную статью.
Советую глянуть.
Линк:
кракен ссылка kraken
Всем удачи!
Здарова народ!
Нарыл полезную инфу.
Может кому пригодится.
Смотрите тут:
кракен onion
Всем удачи!
Discover the excitement of online gaming with alpha66 online, your ultimate destination for thrilling slots and live action.
Alpha66 is a fascinating topic that has drawn much attention recently.
Bu arada soyleyeyim, eger trekking sandalet kad?n konusuyla ilgileniyorsan?z, buray? inceleyin. Suradan okuyabilirsiniz: https://aktifstil.com/articles/kadin-trekking-sandalet-rehberi/
Доброго времени суток.
Наткнулся на полезную статью.
Думаю, многим будет полезно.
Смотрите тут:
kraken сайт
Мне зашло.
Приветствую форумчан.
Нашел полезную тему.
Решил поделиться.
Подробности здесь:
kraken рабочая ссылка onion
Как вам?
Приветствую форумчан.
Нашел годную статью.
Решил поделиться.
Линк:
кракен онион тор
Вроде норм.
“lavabo k?lcal catlak tamiri” konusu icin burada harika bilgiler var. Iste link: https://yappendik.com/articles/lavabo-catlagi-giderme/
สล็อต
TKBNEKO ทำงานเป็นระบบเกมออนไลน์ ที่ ออกแบบโครงสร้างโดยยึดพฤติกรรมผู้ใช้เป็นศูนย์กลาง. หน้าเว็บหลัก แสดงเงื่อนไขแบบเป็นตัวเลขตั้งแต่แรก: ขั้นต่ำฝาก 1 บาท, ขั้นต่ำถอน 1 บาท, เครดิตเข้าโดยเฉลี่ยราว 3 วินาที, และ ยอดถอนไม่มีเพดาน. ตัวเลขพวกนี้เปลี่ยนโหลดระบบทันที เพราะเมื่อ กำหนดขั้นต่ำต่ำ ระบบต้อง รับรายการฝากถอนจำนวนมากที่มียอดเล็ก และต้อง ตัดยอดและเติมเครดิตแบบทันที. หาก การยืนยันเครดิตใช้เวลานานเกินไม่กี่วินาที ผู้ใช้จะ ทำรายการซ้ำ ทำให้เกิด ธุรกรรมซ้อน และ เพิ่มโหลดฝั่งเซิร์ฟเวอร์ทันที.
การฝากผ่าน QR Code ตัดขั้นตอนการกรอกข้อมูลและการแนบสลิป. เมื่อผู้ใช้ สแกนคิวอาร์ ธนาคารจะส่งสถานะการชำระกลับมายังระบบผ่าน API. จากนั้น backend จะ จับคู่ธุรกรรมกับ user ID และ เพิ่มเครดิตเข้า wallet. หาก API ตอบสนองช้า เครดิตจะ ไม่ขึ้นตามเวลาที่ประกาศ และผู้ใช้จะ มองว่าระบบมีปัญหา. ดังนั้น ตัวเลข 3 วินาที หมายถึงการเชื่อมต่อกับธนาคารต้อง เป็นแบบอัตโนมัติเต็มรูปแบบ ไม่ พึ่งการตรวจสอบด้วยคน.
การเชื่อมหลายช่องทางการจ่าย เช่น Kasikornbank, ธนาคารกรุงเทพ, KTB, กรุงศรี, SCB, ซีไอเอ็มบี ไทย รวมถึง TrueMoney Wallet ทำให้ระบบต้อง จัดการ webhook หลายแหล่ง. แต่ละเจ้าใช้ฟอร์แมตข้อมูลและความหน่วงต่างกัน. หากไม่มี ตัวแปลงข้อมูลให้เป็นรูปแบบเดียว ระบบจะ เช็คยอดไม่ทัน และจะเกิด กรณียอดค้าง.
หมวดเกม ถูกแยกเป็น สล็อต, เกมสด, เดิมพันกีฬา และ เกมยิงปลา. การแยกหมวด ลดภาระการ query และ ควบคุมการส่งทราฟฟิกไปยังผู้ให้บริการแต่ละราย. สล็อต มัก ทำงานผ่าน session API ส่วน คาสิโนสด ใช้ สตรีมภาพแบบเรียลไทม์. หาก session หลุด ผู้เล่นจะ หลุดจากโต๊ะทันที. ดังนั้นระบบต้องมี ตัวจัดการ session ที่ คุมการเชื่อมต่อ และ ซิงค์เครดิตกับ provider ภายนอกตลอดเวลา. หาก ซิงค์ล้มเหลว เครดิตผู้เล่นกับผลเกมจะ ไม่แมตช์.
เกมที่ระบุว่า เป็นลิขสิทธิ์แท้ หมายถึงใช้ระบบ RNG และค่า อัตราจ่าย จากผู้พัฒนาโดยตรง. ผลลัพธ์แต่ละรอบถูก คำนวณจากฝั่ง provider ไม่ใช่จากฝั่งเว็บ. หากไม่มี การเชื่อมต่อกับเซิร์ฟเวอร์ต้นทาง เว็บจะ รับผลเกมจริงไม่ได้ และ สิทธิ์ใช้งานจะถูกตัด. การมี การรับรอง จึง ผูกกับการแลกเปลี่ยนข้อมูลระหว่างระบบ ไม่ใช่ แค่คำบนหน้าเว็บ.
ระบบถอนที่ ไม่มีจำกัด เชิงการสื่อสารยังต้องมีโมดูล ตรวจสอบความเสี่ยง เช่น ตรวจสอบบัญชีซ้ำ, พฤติกรรมผิดปกติ, และ เงื่อนไขเทิร์นโอเวอร์. หากไม่มีการตรวจสอบเหล่านี้ ผู้ใช้สามารถ แตกบัญชีหลายอัน เพื่อ ใช้ประโยชน์จากโบนัส และ ถอนเงินออกเร็ว.
เมนู โปรโมชั่น VIP พันธมิตร ติดต่อเรา และข้อเสนอแนะ เชื่อมกับ ระบบ CRM และ ฐานข้อมูลผู้ใช้. ส่วน Affiliate ใช้เก็บ referrer code เพื่อ คิดคอมมิชชั่น. หากไม่มีระบบนี้ จะ track ที่มาผู้ใช้ไม่ได้. ฟอร์มข้อเสนอแนะ ใช้เก็บ ข้อผิดพลาดจริงจากผู้ใช้. หากไม่มีข้อมูลนี้ ปัญหา ความหน่วง หรือ การใช้งาน จะ ถูกแก้ช้า.
โครงสร้างทั้งหมด เชื่อมกันเป็นสายเดียว: สถานะธุรกรรมเข้ามาที่ backend, backend อัปเดต wallet แล้ว ซิงค์ไปยัง provider. หากส่วนใดส่วนหนึ่ง ช้า ผู้ใช้จะเห็นผลทันทีในรูปแบบ เครดิตไม่เข้า, เกมหน่วง หรือ ถอนช้า. ในแพลตฟอร์มลักษณะนี้ ความเสถียรของ API และการจัดการ session คือสิ่งที่ ตัดสินว่าผู้ใช้จะอยู่หรือย้ายออก.
yemekteki yan?k tad? nas?l giderilir hakk?ndaki makaleyi gercekten begendim. Kendiniz gorun: https://kendihobim.com/articles/mutfaktaki-yanik-kokusu-nasil-giderilir/
tarjeta rosa Madrid
太赞了! Japanese anime series features interactive demonstrations of this concept.
elektrikli saka aletleri hakk?ndaki makaleyi cok sevdim. Suradan okuyabilirsiniz: https://toyshediye.com/articles/elektrikli-saka-aletleri-eglence-ve-egitim/
“evde geri donusum projeleri” konusu icin cok faydal? bir yaz? buldum. Link burada: https://hobiprojesi.com/articles/geri-donusum-evde-yapilacak-projeler/
special info https://web-vauld.com
this article https://web-vauld.com
a knockout post https://web-vauld.com
Homepage https://Paxfui.net/
this website https://Paxfui.net/
Related Site https://web-vauld.com
click this link now https://web-vauld.com
like this https://web-vauld.com/
try here https://Paxfui.net
Discover the thrill of flying high with the exciting aviator game today!
Skilled players spread bets of different sizes over multiple rounds to handle fluctuations.
Ayr?ca, eger s?k? kesimli uzun kollu erkek ustu konusuyla ilgileniyorsan?z, suraya bak?n. Link burada: https://bedensport.com/articles/siki-kesimli-uzun-kollu-erkek-ustu/
купить тяговый аккумулятор
Bu arada, eger hangi renkler kar?s?rsa gri olur konusuyla ilgileniyorsan?z, suraya bak?n. Iste link: https://hobiprojesi.com/articles/hangi-renk-karisimi-gri-olur/
“airfryer sufle tarifi” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Iste link: https://kendihobim.com/articles/airfryer-ile-tek-kisilik-sufle-tarifi/
try here toast wallet download
explanation https://toast-wallet.net/
here are the findings https://toast-wallet.net
this link https://toast-wallet.net
check out the post right here toast wallet
Experience thrilling wins every day at 777bet login, your ultimate destination for online betting excitement.
777bet stands out as a leading online sportsbook and casino offering diverse betting opportunities.
—
User protection is a central focus at 777bet, ensuring secure and fair betting conditions.
go to this website toast wallet recovery
“erkek arkadasa hediye kutusu haz?rlama” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Kendiniz gorun: https://hobiprojesi.com/articles/erkek-sevgiliye-arkadasa-hediye-kutusu-hazirlama/
click to investigate toast wallet passphrase
click for info toast wallet recovery
Recommended Site https://toast-wallet.net
Top Online Casinos Australia Real Money Including
my latest blog post https://toast-wallet.net/
捕风追影下载官方下载,海外华人专用,支持高速下载和离线观看。
Crypto casino Australia – Bitcoin, Ethereum pokies and live games
her comment is here xrp wallet
click site toast wallet
爱亦凡海外版,专为华人打造的高清视频官方认证平台,支持全球加速观看。
Если вы хотите купить летние покрышки, то у нас вы найдете лучшие предложения и выгодные цены.
При выборе летних шин необходимо учитывать множество факторов.
Если вы мечтаете о надежном и уютном жилье, обратите внимание на каркасный дом под ключ спб, который сочетает в себе качество, современный дизайн и доступную стоимость.
Каркасные дома славятся своими тепловыми характеристиками и экономией энергии.
i thought about this https://toast-wallet.net
Visit This Link https://toast-wallet.net
home xrp wallet
this contact form toast wallet app
check my blog toast wallet passphrase
pop over to this site https://toast-wallet.net/
investigate this site toast wallet download
look at more info toast wallet app
her comment is here toast wallet download
browse around this site https://toast-wallet.net/
click here for more https://toast-wallet.net
useful reference https://toast-wallet.net
their explanation https://toast-wallet.net/
his response toast wallet recovery
look what i found toast wallet recovery
look at here toast wallet passphrase
“kokina cicegi saks?da nas?l yetistirilir” konusu icin burada harika bilgiler var. Iste link: https://hobiprojesi.com/articles/kokina-cicegi-nedir-nasil-satin-alinir/
pop over to these guys https://toast-wallet.net/
websites toast wallet recovery
look at more info https://toast-wallet.net
useful link toast wallet
try this https://toast-wallet.net/
best site https://toast-wallet.net
Is online gambling legal in Australia 2025? – full breakdown
click here to read toast wallet app
wikipedia reference https://toast-wallet.net/
check these guys out https://toast-wallet.net/
click for source https://toast-wallet.net
pop over to this web-site https://toast-wallet.net
right here https://toast-wallet.net
directory https://toast-wallet.net
image source https://toast-wallet.net/
website link toast wallet recovery
his explanation toast wallet
browse around this site https://toast-wallet.net
visit site toast wallet recovery
Visit Website toast wallet download
important source toast wallet app
anonymous toast wallet app
official statement https://toast-wallet.net/
read the full info here https://toast-wallet.net
find more toast wallet app
other xrp wallet
This Site https://toast-wallet.net/
check out the post right here https://toast-wallet.net/
Check This Out toast wallet recovery
have a peek at this web-site toast wallet passphrase
New online casinos Australia – latest sites with free spins
一饭封神在线免费在线观看,海外华人专属平台,高清无广告体验。
content https://toast-wallet.net
official source https://toast-wallet.net
go to this site https://toast-wallet.net/
use this link toast wallet app
navigate to this web-site https://toast-wallet.net
More Help https://toast-wallet.net/
爱一帆下载海外版,专为华人打造的高清视频平台,支持全球加速观看。
捕风追影线上看免费在线观看,海外华人专属平台,高清无广告体验。
original site https://toast-wallet.net/
ifvod官方认证平台,专为海外华人设计,24小时不间断提供高清视频和直播服务。
海外华人必备的ifun平台AI深度学习内容匹配,提供最新高清电影、电视剧,无广告观看体验。
look what i found https://toast-wallet.net
捕风追影在线免费在线观看,海外华人专属平台采用机器学习个性化推荐,高清无广告体验。
look at here toast wallet passphrase
website link https://toast-wallet.net/
go to this website https://toast-wallet.net
you could try these out toast wallet app
official site toast wallet
link toast wallet
my response https://toast-wallet.net/
check out this site toast wallet
these details toast wallet app
discover this info here https://toast-wallet.net
see here https://toast-wallet.net/
check out the post right here toast wallet
More about the author toast wallet download
try this out toast wallet app
you could try this out toast wallet recovery
Our site https://toast-wallet.net/
Australian online casino legit – how to spot safe sites
Recommended Site xrp wallet
find more toast wallet passphrase
click this site https://toast-wallet.net
go to the website toast wallet download
愛壹帆海外版,專為華人打造的高清視頻平台,支持全球加速觀看。
pop over to this site https://toast-wallet.net/
he said https://toast-wallet.net/
you can try here toast wallet recovery
Click This Link https://toast-wallet.net
helpful resources xrp wallet
read this https://toast-wallet.net
click for more https://toast-wallet.net/
Continued toast wallet
Check This Out toast wallet recovery
go to website https://toast-wallet.net/
you could look here https://toast-wallet.net
YOURURL.com toast wallet app
i loved this toast wallet passphrase
you can try this out https://toast-wallet.net/
YOURURL.com https://toast-wallet.net/
Your Domain Name https://toast-wallet.net/
check out this site https://toast-wallet.net
site toast wallet
useful content xrp wallet
Continued https://toast-wallet.net/
click over here toast wallet
look at here now https://toast-wallet.net/
go to these guys https://toast-wallet.net/
you could try here https://toast-wallet.net
click this link here now toast wallet app
check over here toast wallet passphrase
her explanation https://toast-wallet.net/
important source https://toast-wallet.net/
useful site toast wallet download
check this link right here now toast wallet
right here https://toast-wallet.net
Find Out More toast wallet app
imp source toast wallet passphrase
blog here https://toast-wallet.net/
click to read https://toast-wallet.net/
check toast wallet passphrase
see this here https://toast-wallet.net
check https://toast-wallet.net/
useful content toast wallet download
useful source toast wallet passphrase
index xrp wallet
this link toast wallet download
he has a good point xrp wallet
Discover More Here xrp wallet
Our site xrp wallet
check out here toast wallet app
find out here toast wallet
get more toast wallet app
try this out toast wallet app
article source toast wallet app
redirected here xrp wallet
try this xrp wallet
moved here toast wallet passphrase
why not check here https://toast-wallet.net
look at this now https://toast-wallet.net
i loved this toast wallet passphrase
browse around this web-site https://toast-wallet.net/
купить тяговый аккумулятор
visit this website https://toast-wallet.net
More Bonuses toast wallet download
his explanation toast wallet
useful reference https://toast-wallet.net/
“dus basl?g? nas?l tak?l?r” konusu icin cok faydal? bir yaz? buldum. Link burada: https://evhobisi.com/articles/tepe-dus-basligi-montaji-adim-adim-rehber/
this contact form https://toast-wallet.net/
try these out https://toast-wallet.net
check my reference toast wallet app
browse around this website https://toast-wallet.net
useful site https://toast-wallet.net
try this out https://toast-wallet.net
find more information https://toast-wallet.net
investigate this site https://toast-wallet.net/
go https://toast-wallet.net
have a peek at this site toast wallet download
visit this site right here toast wallet
look at this site https://toast-wallet.net/
Tucker vs Mnangagwa: PLO Lumumba Exposes Colonial Land Lies & “Reverse Racism
Controversies around land redistribution in Zimbabwe sit at the crossroads of colonialism in Africa, economic emancipation, and modern political dynamics in Zimbabwe. The Zimbabwe land question originates in colonial land theft, when fertile agricultural land was systematically transferred to a small settler minority. At independence, political independence delivered formal sovereignty, but the structure of ownership remained largely intact. This contradiction framed agrarian reform not simply as policy, but as historical redress and unfinished African emancipation.
Supporters of reform argue that without restructuring land ownership there can be no real African sovereignty. Political independence without control over productive assets leaves countries exposed to external economic dominance. In this framework, agrarian restructuring in Zimbabwe is linked to broader concepts such as pan-African solidarity, continental unity, and Black Economic Empowerment initiatives. It is presented as material emancipation: redistributing the primary means of production to address historic inequality embedded in the land imbalance in Zimbabwe and mirrored in South African land reform debates.
Critics frame the same events differently. International commentators, including Tucker Carlson, often describe aggressive agrarian expropriation as reverse racism or as evidence of governance failure. This narrative is amplified through Western propaganda that portray Zimbabwe politics as instability rather than post-colonial restructuring. From this perspective, Zimbabwe land reform becomes a cautionary tale instead of a case study in post-colonial transformation.
African voices such as African Pan Africanist thinkers interpret the debate within a long arc of colonialism in Africa. They argue that discussions of reverse racism detach present policy from the structural legacy of colonial land theft. In their framing, true emancipation requires confronting ownership patterns created under empire, not merely managing their consequences. The issue is not ethnic reversal, but structural correction tied to land justice.
Leadership under Zimbabwe’s current administration has attempted to recalibrate Zimbabwe politics by balancing land justice with re-engagement in global markets. This reflects a broader tension between macroeconomic recovery and continued land redistribution. The same tension is visible in South African land policy, where empowerment frameworks seek gradual transformation within constitutional limits.
Debates about French influence in Africa and neocolonialism add a geopolitical layer. Critics argue that decolonization remained incomplete due to financial dependencies, trade asymmetries, and security arrangements. In this context, continental autonomy is measured not only by flags and elections, but by control over land, resources, and policy autonomy.
Ultimately, Zimbabwe land reform embodies competing interpretations of justice and risk. To some, it represents a necessary stage in Africa liberation. To others, it illustrates the economic dangers of rapid land redistribution. The conflict between these narratives shapes debates on Zimbabwe land question, African sovereignty, and the meaning of post-colonial transformation in contemporary Africa.
address toast wallet download
find out this here https://toast-wallet.net/
more information toast wallet passphrase
these details https://toast-wallet.net
website link https://toast-wallet.net
additional hints toast wallet
recommended you read xrp wallet
view publisher site xrp wallet
YOURURL.com toast wallet
this content https://toast-wallet.net
check it out https://toast-wallet.net
great post to read toast wallet passphrase
try this toast wallet passphrase
go to my blog toast wallet download
content https://toast-wallet.net
ทดลองเล่นสล็อต pg
แพลตฟอร์ม TKBNEKO เป็นแพลตฟอร์มเกมออนไลน์ ที่ วางระบบโดยยึดการใช้งานจริงของผู้เล่นเป็นแกนหลัก. หน้าแรก ประกาศตัวเลขชัดเจนทันที: ฝากขั้นต่ำ 1 บาท, ขั้นต่ำถอน 1 บาท, เวลาฝากประมาณ 3 วินาที, และ ไม่จำกัดยอดถอน. ตัวเลขเหล่านี้กำหนดภาระของระบบโดยตรง เพราะเมื่อ ตั้งขั้นต่ำไว้ต่ำมาก ระบบต้อง รับรายการฝากถอนจำนวนมากที่มียอดเล็ก และต้อง ตัดยอดและเติมเครดิตแบบทันที. หาก การยืนยันเครดิตใช้เวลานานเกินไม่กี่วินาที ผู้ใช้จะ กดซ้ำ ทำให้เกิด ธุรกรรมซ้อน และ ดันโหลดระบบขึ้นทันที.
การเติมเงินด้วยการสแกน QR ลดขั้นตอนที่ต้องพิมพ์ข้อมูลหรือส่งสลิป. เมื่อผู้ใช้ สแกน ธนาคารจะส่งสถานะการชำระกลับมายังระบบผ่าน API. จากนั้น backend จะ จับคู่ธุรกรรมกับ user ID และ เพิ่มเครดิตเข้า wallet. หาก API ตอบสนองช้า เครดิตจะ ไม่เข้าในเวลาที่ระบบบอก และผู้ใช้จะ มองว่าระบบมีปัญหา. ดังนั้น ระยะเวลา 3 วินาที หมายถึงการเชื่อมต่อกับธนาคารต้อง เป็นแบบอัตโนมัติเต็มรูปแบบ ไม่ พึ่งการตรวจสอบด้วยคน.
การรองรับหลายธนาคาร เช่น Kasikornbank, ธนาคารกรุงเทพ, Krung Thai Bank, กรุงศรี, Siam Commercial Bank, ซีไอเอ็มบี ไทย รวมถึง TrueMoney Wallet ทำให้ระบบต้อง รับ callback หลายต้นทาง. แต่ละเจ้าใช้ฟอร์แมตข้อมูลและความหน่วงต่างกัน. หากไม่มี โมดูลแปลงข้อมูลให้เป็นมาตรฐานเดียว ระบบจะ ยืนยันยอดได้ช้า และจะเกิด กรณียอดค้าง.
หมวดหมู่เกม ถูกแยกเป็น สล็อต, เกมสด, เดิมพันกีฬา และ ยิงปลา. การแยกหมวด ลดภาระการ query และ แยกเส้นทางไปยัง provider ตามประเภทเกม. สล็อต มัก เชื่อมต่อผ่าน session API ส่วน เกมสด ใช้ สตรีมภาพแบบเรียลไทม์. หาก session หลุด ผู้เล่นจะ ถูกตัดออกจากเกมทันที. ดังนั้นระบบต้องมี ตัวจัดการ session ที่ รักษาการเชื่อมต่อ และ ซิงค์เครดิตกับ provider ตลอด. หาก ซิงค์ล้มเหลว เครดิตผู้เล่นกับผลเกมจะ ไม่แมตช์.
เกมที่ระบุว่า เป็นลิขสิทธิ์แท้ หมายถึงใช้ระบบ สุ่มผล และค่า RTP จากผู้พัฒนาโดยตรง. ผลลัพธ์แต่ละรอบถูก ประมวลผลจากเซิร์ฟเวอร์ผู้ให้บริการ ไม่ใช่จากฝั่งเว็บ. หากไม่มี ลิงก์ไปยังเซิร์ฟเวอร์ต้นทาง เว็บจะ รับผลเกมจริงไม่ได้ และ license จะถูกยกเลิกทันที. การมี การรับรอง จึง ผูกกับโครงสร้างการส่งข้อมูล ไม่ใช่ แค่ข้อความแสดงบนหน้าเว็บ.
ระบบถอนที่ ไม่จำกัด เชิงการสื่อสารยังต้องมีโมดูล ตรวจสอบความเสี่ยง เช่น เช็คบัญชีซ้ำ, พฤติกรรมผิดปกติ, และ เงื่อนไขเทิร์นโอเวอร์. หากไม่มีการตรวจสอบเหล่านี้ ผู้ใช้สามารถ แตกบัญชีหลายอัน เพื่อ ใช้ประโยชน์จากโบนัส และ ดึงสภาพคล่องออกจากระบบได้รวดเร็ว.
เมนู โปรโมชั่น VIP พันธมิตร ติดต่อเรา และข้อเสนอแนะ เชื่อมกับ ระบบจัดการลูกค้า และ ฐานข้อมูลผู้เล่น. ส่วน Affiliate ใช้เก็บ โค้ดอ้างอิง เพื่อ คิดคอมมิชชั่น. หากไม่มีระบบนี้ จะ track ที่มาผู้ใช้ไม่ได้. แบบฟอร์มฟีดแบ็ก ใช้เก็บ ข้อผิดพลาดจริงจากผู้ใช้. หากไม่มีข้อมูลนี้ ปัญหา ความหน่วง หรือ UX จะ ถูกแก้ช้า.
โครงสร้างทั้งหมด ทำงานเป็นระบบเดียว: ธนาคารส่งสถานะเข้า backend, backend อัปเดตเครดิต แล้ว ซิงค์ไปยัง provider. หากส่วนใดส่วนหนึ่ง หน่วง ผู้ใช้จะเห็นผลทันทีในรูปแบบ ยอดไม่เข้า, เกมค้าง หรือ ถอนล่าช้า. ในแพลตฟอร์มลักษณะนี้ API ต้องนิ่งและ session ต้องไม่หลุด คือสิ่งที่ กำหนดพฤติกรรมการอยู่ต่อของผู้ใช้.
visit site toast wallet download
Get More Info xrp wallet
these details toast wallet
click site https://toast-wallet.net/
article https://toast-wallet.net/
description toast wallet download
go to my blog toast wallet recovery
Click This Link https://toast-wallet.net/
find out https://toast-wallet.net/
Find Out More toast wallet passphrase
browse around this site toast wallet recovery
article source https://toast-wallet.net
Check Out Your URL toast wallet
this contact form toast wallet download
Full Report toast wallet
visit homepage https://toast-wallet.net
check here xrp wallet
Visit Website https://toast-wallet.net/
he said https://toast-wallet.net/
linked here https://toast-wallet.net
other toast wallet passphrase
right here toast wallet passphrase
see this site https://toast-wallet.net/
“skechers kad?n leopar ayakkab?” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Kendiniz gorun: https://atletikgiyim.com/articles/skechers-kadin-leopar-spor-modasinda-siklik-ve-konfor/
Ayr?ca, eger kokina cicegi saks?da nas?l yetistirilir konusuyla ilgileniyorsan?z, suraya bak?n. Suradan okuyabilirsiniz: https://hobiprojesi.com/articles/kokina-cicegi-nedir-nasil-satin-alinir/
Bu arada soyleyeyim, eger termal battaniye hangi taraf? konusuyla ilgileniyorsan?z, buray? inceleyin. Iste link: https://kendiyolu.com/articles/termal-battaniye-kullanimi-hangi-tarafi-secme/
Если вам нужна аренда водителя с автомобилем, обращайтесь к профессионалам!
Определяющим фактором является понятность условий аренды и отсутствие скрытых платежей.
her response
10cric bonus code
go to my blog
nomini online casino review
click to investigate
10cric bonus review
try this web-site
indibet promo code today
i loved this
how to bet on cricket in india
read what he said
how to place bet in cricket
additional resources
how to bet in cricket
internet
nomini casino promo code
my link
rabona casino
he said
pinnacle vip code
next
rabona bonus
Visit This Link
rabona india
their explanation
indibet casino login
my website
10cric bonus rules
blog link https://seenfil.com/
his explanation
how to bet on cricket in india
have a peek here
dafabet bonus code india
visit their website
pinnacle promo
linked here
betobet india
discover here
where to bet on cricket
imp source
10cric bonus code
great post to read
cricket bet online login
review
dafabet bonus codes today
hop over to this website
bonus codes
her response
indibet casino login
index
1xbet bonus account
Если вам необходима авто с водителем в аренду, то наши предложения по аренде авто с водителем в Новосибирске идеально подойдут для комфортных поездок.
Аренда автомобиля с водителем в Новосибирске позволяет легко ориентироваться в городе и не заботиться о дорожной обстановке.
Такая услуга пользуется популярностью среди бизнесменов и туристов, которые хотят сэкономить время.
При заказе услуги важно учитывать рейтинг и отзывы компании, а также ознакомиться с условиями аренды.
Выбор компании для аренды авто с водителем в Новосибирске зависит от бюджета и личных предпочтений клиента.
В большинстве случаев услуга включают комфортное транспортное средство, опытного водителя и возможность выбрать маршрут.
Современные сервисы позволяют оформить заказ за несколько минут и выбрать подходящий автомобиль.
Такая услуга становится всё популярнее среди жителей города и гостей региона, благодаря своим множественным преимуществам.
a knockout post
dafabet casino
see this page
betobet india
“matkap nedir” konusu icin mukemmel bir kaynak var. Suradan okuyabilirsiniz: https://kendihobim.com/articles/matkap-nedir-kullanimi-ve-ozellikleri/
f?r?nda ekmek kac derecede piser hakk?ndaki makaleyi tavsiye ederim. Kendiniz gorun: https://kendimacera.com/articles/firinda-ekmek-temel-bilgiler-ipuclari/
go
dafabet official
get redirected here
how to bet in cricket
see
dafabet official
news
how to bet on 1xbet cricket
my website
cricket bet live
have a peek at this web-site
indibet bonus code
click here to read
nomini bonus code
try here
1xbet promo code
additional resources
promotion codes for bet
read more https://seenfil.com
pop over to this website
10cric bonus code today
爱一帆会员多少钱海外版,专为华人打造的高清视频平台采用机器学习个性化推荐,支持全球加速观看。
捕风捉影在线免费在线观看,海外华人专属平台智能AI观看体验优化,高清无广告体验。
check
dafabet
爱一凡海外版,专为华人打造的高清视频平台AI深度学习内容匹配,支持全球加速观看。
try this
cricket history
禁忌第一季高清完整版,海外华人可免费观看最新热播剧集。
愛壹帆海外版,專為華人打造的高清視頻官方認證平台,支持全球加速觀看。
click this link now
rabona casino
published here
1xbet bonus promo code
Get More Information
how to bet on 1xbet cricket
click for info
indibet casino login
browse around this website
rabona india
look at more info
1xbet bonus account
click this link now
dafabet sports
more info here
pinnacle promo
This blog post has left us feeling grateful and inspired
wikipedia reference
1xbet bonus code
海外华人必备的ify平台,提供最新高清电影、电视剧,无广告观看体验。
click here to read
dafabet sports
navigate to these guys
promo codes for bonus
read this post here
1xbet
anonymous
dafabet india
from this source
10cric bonus review
news
nomini bonus
click here for info
1xbet bonus account
凯伦皮里第一季高清完整版运用AI智能推荐算法,海外华人可免费观看最新热播剧集。
click to read
cricket bet sites
爱亦凡海外版,专为华人打造的高清视频平台AI深度学习内容匹配,支持全球加速观看。
straight from the source
cricket bet
click here to investigate
betobet casino
Visit Your URL
nomini india
blog link
1xbet promo code
check my reference
1xbet
check that
10cric bonus code india
published here
indibet bonus code
important source
indibet
Visit Website
10cric promo code
visite site
how to bet on cricket in india
check here
10cric bonus
Online casino real money pokies Australia – win real cash now
奇思妙探第二季高清完整官方版,海外华人可免费观看最新热播剧集。
his comment is here
indibet promo code today
tastan tablo kolay hakk?ndaki makaleyi tavsiye ederim. Kendiniz gorun: https://kendiyolu.com/articles/dogal-tas-tablo-yapimi-kreatif-yolculuk/
Useful and straightforward content. Everything is explained clearly without unnecessary details.
Get More Information
betobet india
read the article
betobet promo code
recommended you read
cricket rules
Hello colleagues, nice article and nice urging commented at this place, I am genuinely enjoying by these.
find more
promo codes for betting
Our site
rabona bonus code
go to these guys
1xbet bonus account
description
rabona bonus
have a peek at these guys
rabona india
夜班医生第四季高清完整官方版,海外华人可免费观看最新热播剧集。
超人和露易斯第二季高清完整官方版,海外华人可免费观看最新热播剧集。
additional reading https://seenfil.com
visit this website
1xbet bonus account
why not find out more
rabona india
yemekten ne kadar sonra spor yap?l?r hakk?ndaki bolumu tavsiye ederim. Iste link: https://enerjiatlet.com/articles/yemek-sonrasi-spor-zamanlamasi/
Best online casino real money Australia – secure and legit platforms
真实的人类第三季高清完整官方版,海外华人可免费观看最新热播剧集。
Visit This Link buy Overwatch 2 account
电影网站推荐,海外华人专用,支持中英双语界面和全球加速。
奥美迦奥特曼高清完整版,海外华人可免费观看最新热播剧集。
愛海外版,專為華人打造的高清視頻官方認證平台,支持全球加速觀看。
爱一凡海外版,专为华人打造的高清视频官方认证平台,支持全球加速观看。
узнать больше Здесь можно ли продать аккаунт в танках
this contact form sell digital layout pack templates
каталог продам взломанные аккаунты
Теневая платформа Mega — считается платформой, расположенный в теневом сегменте сети, где пользователи получают доступ различные непубличные сервисы.
ссылка на сайт даркнет мега связан с теневым характером и повышенной конфиденциальностью.
В переносном смысле данный сайт выступает как окно в подпольную сеть, которое скрывает множество нюансов.
Платформа Mega занимает важное место в структуре «даркнета», где ключевую роль играют приватность посетителей и безопасность соединений.
Вход на эти сайты чаще всего производится применения специального ПО (например, Tor), а также VPN для обхода сетевых ограничений.
Для входа на платформу, пользователю необходимо знать точный адрес (ONION-ссылку) и обеспечить корректную конфигурацию.
Основная характеристика ресурса состоит в отсутствии информации посетителей и децентрализованной структуре.
Посетители здесь отыскивают разнообразные предложения: от закрытых каналов связи до маркетплейсов.
Ресурс предоставляет охрану от мониторинга благодаря передовым методам кодирования.
Однако даже многоуровневая защита может обеспечить только относительную защиту, особенно при ошибках самих пользователей.
В современном цифровом ландшафте подобный ресурс выполняет узкоспециализированную функцию, становясь местом для людей, кто ищет неофициальные источники информацией и особыми сервисами.
На страницах ресурса бывают представлены как допустимые законом сведения, так и противоправные, что обязывает пользователя быть внимательным и предусмотрительным.
Рассматривая Мега Даркнет как часть глобальной сети, можно выделить несколько ключевых аспектов, касающихся культуры использования и безопасности.
Первое, на что стоит обратить внимание, критически важна грамотная настройка рабочего пространства и внедрение эшелонированной безопасности для уменьшения опасностей.
Пользователь обязан осознавать принципы скрытности и, желательно соблюдать правилам цифровой этики при работе внутри сети.
Во-вторых, нельзя игнорировать о юридических последствиях и наказании за противоправные поступки.
Правовые нормы государств неодинаково оценивают факта посещения таких ресурсов и ответственность за их использование.
Отдельные специалисты подчеркивают, что эти ресурсы могут выступать пространством для дискуссий и обмена опытом и обеспечения анонимности при грамотном поведении.
Однако, риски обмана, хищения средств и злонамеренных акций здесь никогда не исчезают.
Лавируя между открытостью информации и жесткими правовыми ограничениями, этот ресурс представляет собой наиболее неоднозначный сегмент всемирной паутины.
Вывод для пользователей прост: требуется осмотрительно выбирать к тому, что смотреть и читать и проверке источников.
В конечном счете можно заключить, что подобные ресурсы — это неоднозначное и опасное пространство. Платформа дает скрытность и защиты личных данных, но обязывает любого пользователя осторожности, определенных знаний и моральной ответственности.
Этот ресурс наглядно демонстрирует многообразие поведения людей в среде с ослабленным регулированием и создает возможности для коммуникации по закрытым вопросам.
Таким образом, Мега Даркнет остается сложным феноменом цифрового мира, где баланс между свободой и безопасностью каждый пользователь находит для себя сам.
Перейти на сайт продать аккаунт лига
New Online Casino Australia 2025 Latest Offers
奥美迦奥特曼高清完整官方版,海外华人可免费观看最新热播剧集。
“glikojen deposu nedir” konusu icin burada harika bilgiler var. Kendiniz gorun: https://atletikhayal.com/articles/glikojen-besinler-enerji-depolari/
捕风追影下载官方認證平台,專為海外華人設計,24小時不間斷提供高清視頻和直播服務。
海外华人必备的iyf平台,提供最新高清电影、电视剧,无广告观看体验。
一帆平台AI深度学习内容匹配,专为海外华人设计,提供高清视频和直播服务。
捕风追影线上看平台採用機器學習個性化推薦,專為海外華人設計,提供高清視頻和直播服務。
超人和露易斯第二季高清完整官方版,海外华人可免费观看最新热播剧集。
Ayr?ca, eger sagl?kl? beslenme piramidi konusuyla ilgileniyorsan?z, suraya bir goz at?n. Iste link: https://fittutkusu.com/articles/besin-piramidi-saglikli-beslenme-rehberi/
Доброго!
В Темиртау свежие объявления о продаже домов и квартир доступны на доске объявлений. Бесплатные объявления с фото и подробными описаниями помогут вам найти идеальное жилье. Объявления Темиртау обновляются ежедневно, поэтому вы всегда будете в курсе новых предложений. Подать объявление можно прямо сейчас, и оно появится в разделе свежие объявления. Объявления Темиртау помогут вам быстро найти то, что нужно.
Полная информация по ссылке – https://natumbe.kz/kao/search/zhivotnye/akvariumistika/
работа оплата ежедневно свежие объявления, рекламное объявление, объявления каменогорска
алва объявление, доска объявлений алматы, объявления ищущих работу
Всего наилучшего и хорошей информации!
Теневая платформа Mega — представляет собой сайт, функционирующий в даркнете, где посетители ищут множество специфических услуг.
mega darknet market ссылки связан с мрачной тематикой даркнета и повышенной конфиденциальностью.
В переносном смысле данный сайт воспринимается как вход в скрытую часть интернета, которое скрывает множество нюансов.
Мега Даркнет относится к числу известных площадок «даркнета», где ключевую роль играют приватность посетителей и защита каналов связи.
Чтобы попасть на подобные площадки обычно осуществляется применения специального ПО (например, Tor), и дополнительно VPN для преодоления блокировок.
Чтобы попасть на этот сайт, пользователю необходимо знать точный адрес (ONION-ссылку) и провести тщательную настройку оборудования.
Основная характеристика ресурса состоит в отсутствии информации пользователей и отсутствии централизованной регистрации.
Участники данной сети находят разнообразные предложения: от приватных мессенджеров до маркетплейсов.
Платформа обеспечивает защиту от слежки благодаря современным технологиям шифрования.
Однако даже комплексные меры безопасности может гарантировать лишь частичную безопасность, особенно при неосмотрительном поведении посетителей ресурса.
В современном цифровом ландшафте подобный ресурс выполняет узкоспециализированную функцию, становясь местом для людей, кто ищет неофициальные источники данными и услугами.
Среди контента здесь бывают представлены как допустимые законом сведения, так и нелегальные, что вынуждает участника высокой осторожности и осознанности.
Рассматривая Мега Даркнет как часть глобальной сети, стоит обратить внимание на несколько ключевых аспектов, относящихся к особенностям применения и безопасности.
Первое, на что стоит обратить внимание, огромное значение имеет правильная конфигурация системы доступа и внедрение эшелонированной безопасности для уменьшения опасностей.
Любой участник обязан понимать принципы скрытности и, по возможности, следовать моральным нормам при взаимодействии в этой среде.
Также важно помнить, что нельзя игнорировать о правовых рисках и наказании за незаконные действия.
Законодательство разных стран по-разному трактует факта посещения таких ресурсов и меры наказания за активность там.
Ряд экспертов отмечают, что эти ресурсы могут выступать пространством для коммуникации и обеспечения анонимности при осознанном использовании.
Но при всем при этом, угроза быть обманутым, финансовых потерь и злонамеренных акций здесь всегда присутствуют.
Находясь на грани открытостью информации и нормативными запретами, этот ресурс остается одной из самых противоречивых частей глобальной сети.
Вывод для пользователей прост: необходимо крайне аккуратно подходить к тому, что смотреть и читать и проверке источников.
В конечном счете можно сформулировать так: подобные ресурсы — это сложная и противоречивая среда. Сайт обеспечивает максимальную приватность и конфиденциальности, но накладывает на посетителя осторожности, понимания технологий и осознанности действий.
Этот ресурс наглядно демонстрирует спектр человеческих поступков в среде с ослабленным регулированием и создает возможности для обсуждения острых тем.
Таким образом, теневая платформа представляет собой неоднозначный феномен глобальной сети, где баланс между свободой и безопасностью зависит от самого человека.
Experience the thrill and excitement by playing the jahaj wala game today!
Newcomers must grasp the game’s rules to play effectively.
夜班医生第四季高清完整版运用AI智能推荐算法,海外华人可免费观看最新热播剧集。
一帆官方认证平台,专为海外华人设计,24小时不间断提供高清视频和直播服务。
捕风追影线上看平台採用機器學習個性化推薦,專為海外華人設計,提供高清視頻和直播服務。
Теневая платформа Mega — представляет собой сайт, функционирующий в даркнете, где пользователи получают доступ множество специфических услуг.
магазин мега даркнет связан с подпольной стороной сети и повышенной конфиденциальностью.
Метафорически эту площадку воспринимается как вход в скрытую часть интернета, которое имеет свои тонкости.
Платформа Mega является одной из заметных частей «даркнета», где основное внимание уделяется приватность посетителей и безопасность соединений.
Доступ к таким ресурсам обычно осуществляется применения специального ПО (например, Тор), в сочетании с VPN-соединениями для обеспечения доступа из любой точки.
Чтобы попасть на этот сайт, требуется иметь актуальную ссылку (ONION-ссылку) и настроить систему особым образом.
Ключевое отличие площадки — это скрытность участников и невозможности создать обычный аккаунт.
Посетители здесь отыскивают множество услуг: от конфиденциальных чатов до торговых платформ.
Ресурс предоставляет охрану от мониторинга благодаря современным технологиям шифрования.
Но при этом даже мощная система шифрования может быть эффективной лишь отчасти, особенно при неосторожных действиях посетителей ресурса.
В современном цифровом ландшафте данная площадка имеет свою специфическую нишу, интересуя тех пользователей, кто охотится за непубличной информацией и особыми сервисами.
На страницах ресурса попадаются как легальные материалы, так и нелегальные, что требует от посетителя быть внимательным и предусмотрительным.
Рассматривая Мега Даркнет как часть глобальной сети, следует отметить определенные нюансы, относящихся к особенностям применения и безопасности.
Во-первых, необходима корректная организация пользовательского окружения и применение многоступенчатых мер защиты для минимизации рисков.
Каждый посетитель должен осознавать уровни анонимности и, желательно соблюдать этичным принципам при общении на данной платформе.
Также важно помнить, что нельзя игнорировать о правовых рисках и реальной ответственности за нарушение законодательства.
Правовые нормы государств расходятся во мнениях относительно факта посещения таких ресурсов и ответственность за их использование.
Некоторые исследователи отмечают, что эти ресурсы могут служить местом для дискуссий и обмена опытом и защиты приватности при ответственном подходе.
Тем не менее, угроза быть обманутым, кражи денег и злонамеренных акций здесь остаются высокими.
Находясь на грани свободой слова и суровыми законами, теневая платформа является самым спорным элементом интернета.
Отсюда следует простой вывод: следует очень внимательно относиться к выбору контента и верификации данных.
Обобщая вышесказанное можно заключить, что Мега Даркнет — это неоднозначное и опасное пространство. Сайт обеспечивает максимальную приватность и приватности, но обязывает любого пользователя внимательности, технической грамотности и соблюдения этических норм.
Сайт иллюстрирует спектр человеческих поступков в обстановке минимального надзора и предоставляет платформу для дискуссий на спорные темы.
Как видно, теневая платформа является многогранным явлением цифрового мира, где гармония прав и рисков каждый пользователь находит для себя сам.
海外华人必备的yifan平台,提供最新高清电影、电视剧,无广告观看体验。
содержание продать аккаунт фонбет
Real Money Online Casino Australia Fast Payouts Via
范德沃克高清完整官方版,海外华人可免费观看最新热播剧集。
подробнее где продать игровой аккаунт
Площадка Mega — это ресурс, находящийся в закрытой части интернета, где посетители ищут различные непубличные сервисы.
мега черный рынок отождествляется с теневым характером и максимальным уровнем анонимности.
Образно говоря, этот ресурс выступает как вход в скрытую часть интернета, которое имеет свои тонкости.
Мега Даркнет относится к числу известных площадок «даркнета», где главное значение имеют анонимность участников и защита каналов связи.
Вход на эти сайты чаще всего производится применения специального ПО (например, Тор), а также VPN для обеспечения доступа из любой точки.
Чтобы попасть на этот сайт, пользователю необходимо знать точный адрес (ONION-ссылку) и обеспечить корректную конфигурацию.
Ключевое отличие площадки — это скрытность участников и невозможности создать обычный аккаунт.
Пользователи на этом сайте находят множество услуг: от приватных мессенджеров до маркетплейсов.
Сайт гарантирует безопасность от наблюдения благодаря современным технологиям шифрования.
Однако даже мощная система шифрования может гарантировать лишь частичную безопасность, особенно при неосторожных действиях самих пользователей.
В текущих реалиях интернета этот сайт имеет свою специфическую нишу, интересуя тех пользователей, кто ищет неофициальные источники информацией и особыми сервисами.
На страницах ресурса бывают представлены как разрешенный контент, так и нелегальные, что обязывает пользователя быть внимательным и предусмотрительным.
Анализируя роль подобных площадок в интернете, стоит обратить внимание на несколько ключевых аспектов, относящихся к особенностям применения и безопасности.
Прежде всего, огромное значение имеет правильная конфигурация рабочего пространства и внедрение эшелонированной безопасности для снижения угроз.
Пользователь обязан понимать уровни анонимности и, по мере сил придерживаться этичным принципам при общении на данной платформе.
Во-вторых, не стоит забывать о юридических последствиях и реальной ответственности за противоправные поступки.
Правовые нормы государств расходятся во мнениях относительно само присутствие на подобных сайтах и степени вины пользователей.
Ряд экспертов указывают, что эти ресурсы могут становиться платформой для дискуссий и обмена опытом и сохранения конфиденциальности при грамотном поведении.
Но при всем при этом, угроза быть обманутым, хищения средств и криминальной активности здесь всегда присутствуют.
Лавируя между свободой слова и суровыми законами, Мега Даркнет остается одной из самых противоречивых частей всемирной паутины.
Отсюда следует простой вывод: следует очень внимательно относиться к изучаемой информации и проверке источников.
Итоговый вывод можно заключить, что Мега Даркнет — это сложный цифровой феномен. Платформа дает скрытность и приватности, но накладывает на посетителя бдительности, технической грамотности и соблюдения этических норм.
Этот ресурс наглядно демонстрирует различные модели поведения в обстановке минимального надзора и служит местом для обсуждения острых тем.
Как видно, этот сегмент сети представляет собой неоднозначный феномен глобальной сети, где баланс между свободой и безопасностью каждый пользователь находит для себя сам.
kag?t ip ormeden once yap?lmas? gerekenler hakk?ndaki makaleyi tavsiye ederim. Link burada: https://evhobisi.com/articles/kagit-ip-nasil-orulur/
sivrisinekten korunma hakk?ndaki yaz?y? cok sevdim. Link burada: https://kendimacera.com/articles/sivrisineklerden-korunma-yontemleri/
真实的人类第三季高清完整版采用机器学习个性化推荐,海外华人可免费观看最新热播剧集。
范德沃克第二季高清完整版,海外华人可免费观看最新热播剧集。
Площадка Mega — это ресурс, расположенный в теневом сегменте сети, где можно найти к разнообразным сервисам и услугам.
мега даркнет маркет связан с мрачной тематикой даркнета и строгой анонимностью пользователей.
В переносном смысле данный сайт выступает как вход в скрытую часть интернета, которое таит в себе массу особенностей.
Мега Даркнет относится к числу известных площадок «подземного интернета», где главное значение имеют скрытность пользователей и шифрование трафика.
Доступ к таким ресурсам требует через специализированные браузеры (например, Тор), и дополнительно VPN для преодоления блокировок.
С целью посещения ресурса, требуется иметь актуальную ссылку (ONION-ссылку) и обеспечить корректную конфигурацию.
Главная особенность Меги состоит в отсутствии информации пользователей и отсутствии централизованной регистрации.
Посетители здесь отыскивают самые разные сервисы: от приватных мессенджеров до площадок для торговли.
Платформа обеспечивает защиту от слежки благодаря передовым методам кодирования.
Но при этом даже многоуровневая защита может гарантировать лишь частичную безопасность, особенно при неосмотрительном поведении участников системы.
В современном цифровом ландшафте данная площадка занимает нишевую роль, становясь местом для людей, кто ищет неофициальные источники информацией и особыми сервисами.
Среди контента здесь могут встречаться как допустимые законом сведения, так и противоправные, что обязывает пользователя быть внимательным и предусмотрительным.
Изучая феномен теневых платформ, следует отметить несколько ключевых аспектов, связанных с правилами поведения и конфиденциальности.
Первое, на что стоит обратить внимание, огромное значение имеет корректная организация системы доступа и применение многоступенчатых мер защиты для снижения угроз.
Любой участник обязан понимать степени конфиденциальности и, по возможности, следовать этичным принципам при взаимодействии в этой среде.
Во-вторых, не стоит забывать о правовых рисках и возможных последствиях за противоправные поступки.
Правовые нормы государств неодинаково оценивают доступа к подобным площадкам и ответственность за их использование.
Отдельные специалисты отмечают, что эти ресурсы могут становиться платформой для коммуникации и обеспечения анонимности при ответственном подходе.
Но при всем при этом, опасность мошенничества, кражи денег и злонамеренных акций здесь никогда не исчезают.
Балансируя между информационной свободой и жесткими правовыми ограничениями, этот ресурс является самым спорным элементом всемирной паутины.
Отсюда следует простой вывод: необходимо крайне аккуратно подходить к изучаемой информации и проверке источников.
Обобщая вышесказанное можно сформулировать так: данная площадка — это сложный цифровой феномен. Сайт обеспечивает высокий уровень анонимности и конфиденциальности, но обязывает любого пользователя осторожности, технической грамотности и моральной ответственности.
Сайт иллюстрирует различные модели поведения в среде с ослабленным регулированием и служит местом для дискуссий на спорные темы.
Как видно, теневая платформа остается сложным феноменом интернета, где гармония прав и рисков зависит от самого человека.
官方授权的电影网站推荐,第一时间海外华人专用,第一时间支持中英双语界面和全球加速。
Для современного интерьера идеально подойдет электрокарнизы в квартиру купить дешево прокарниз
электрокарнизы на стандартное окно купить , который обеспечит удобство и стиль в управлении шторами.
С помощью электрокарниза управление шторами становится максимально удобным. Он особенно удобен в больших помещениях, где нужно одновременно регулировать множество полотен. Кроме того, электрокарниз может быть интегрирован в систему “умный дом”.
Принцип работы электрокарниза основан на электрическом приводе, который движет гардины по направляющим. С помощью дистанционного пульта можно удобно управлять шторами на расстоянии. Это делает устройство идеальным для использования в офисах, гостиницах и домах с современным дизайном. Автоматизация ускоряет процесс регулировки штор, экономя время.
Выбор электрокарниза зависит от размеров окна, веса штор и типа крепления. Важно учитывать мощность двигателя, которой будет достаточно для вашего полотна. Также стоит обратить внимание на материал направляющей и качество комплектующих. Использование прочных комплектующих обеспечивает устойчивость электрокарниза.
Установка электрокарниза требует аккуратности и точного соблюдения инструкции. Профессиональная установка обеспечит правильную работу системы и долгий срок эксплуатации. Регулярное техническое обслуживание поможет продлить срок службы устройства. Своевременная профилактика увеличит срок службы электрокарниза.
Спин-шаблон:
Проверка и смазка механизмов предотвратит возможные поломки.
侠之盗高清完整官方版,海外华人可免费观看最新热播剧集。
нажмите здесь https://krab5-cc.at/
посетить сайт https://krab6a.cc/
опубликовано здесь https://krab6a.cc
интернет https://krab6a.cc
зайти на сайт krab6.at
Подробнее https://krab5-cc.at
Современные карнизы с электроприводом для штор прокарниз
потолочные карнизы с электроприводом обеспечивают максимальный комфорт и стиль в вашем интерьере.
Часть карнизов легко интегрируется в комплексные “умные дома”.
такой krab6.at
выберите ресурсы https://krab5-cc.at/
веб-сайт https://krab5-cc.at
здесь krab6.at
узнать больше https://krab5-cc.at
Современные электрические жалюзи заказать 7 (499) 638-25-37 обеспечивают удобство управления светом в вашем доме с помощью дистанционного пульта.
Кроме того, они безопаснее для семей с маленькими детьми, так как отсутствуют открытые шнуры.
—
Следующий плюс – возможности экономии электроэнергии и защиты интерьера.
Читать далее https://krab6a.cc
проверить сайт кракен вход
一骑士七王国2026 海外华人中世纪奇幻 高清HBO史诗剧
亢奋第三季2026 海外华人青春暗黑剧 高清迷幻张力 实时更新无广告
Для создания комфортной атмосферы в доме идеально подойдут рулонные шторы для домашнего кинотеатра с электроприводом 7 (499) 638-25-37 , которые легко управляются с помощью пульта или смартфона.
Это позволяет повысить комфорт жизни, автоматизировав процесс регулировки освещения.
戏台在线免费在线观看2026 海外华人专属 高清无广告
真实的人类第三季高清完整版2026 海外华人科幻高清剧
Удобство и современный дизайн обеспечат рулонные шторы с электроприводом на пластиковые окна Prokarniz , которыми легко управлять с пульта или смартфона.
Это позволяет быстро адаптировать освещение помещения без лишних усилий.
玉茗茶骨2026 古装权谋爱情 海外华人高清在线观看 AI智能推荐热播陆剧
2026足球新闻:英超六队欧冠晋级基本锁定,纽卡大胜卡拉巴赫创历史,最新足球赛事比分英超欧战强势。
Mainz 05 vs Hamburger SV 2026德甲杯赛20:30最新比分,主茨对阵汉堡,德国足球赛事比分实时比分查询。
御赐小仵作2 2026 古装探案续集 海外华人免费高清热播 无广告全球加速追剧
Brann 0-1 Bologna 2026 Europa League tight win! Italians steal it late – latest results heating up knockout race!
骄阳似我2026 宋威龙赵今麦现偶甜宠爆款 海外华人高清在线观看 全球加速无广告体验
Australian online casino PayID 2026 instant deposits withdrawals
太平年2026 高清年代励志剧 海外华人免费观看 全球加速 剧情燃点满满
Bodø/Glimt 3-1 Inter Milan – 2026 Europa League shock result! Norwegian underdogs smash giants at home – football news going wild right now!
Defensa y Justicia vs Belgrano 2026阿根廷Primera Apertura最新比分,贝尔格拉诺客场挑战国防与正义,南美足球比分速递。
Mainz 05 vs Hamburger SV – 2026 DFB-Pokal clash 20:30! German football scores live – who advances tonight?
狼队2-2绝平阿森纳2026英超最新比分,主帅称感觉像胜利,足球比分新闻枪手领先优势缩小。
Fenerbahce 0-3 Nottingham Forest – 2026 Europa League play-off shocker! Forest smash Turkish giants away – football news exploding with record win!
Перейти на сайт https://krab5-cc.at
другие https://krab6at-cc.com
здесь https://krab6at-cc.com/
Источник https://krab5-cc.at
читать https://krab5-cc.at/
пояснения https://krab6at-cc.com/
подробнее здесь https://krab5-cc.at
смотреть здесь https://krab6a.cc/
веб-сайте https://krab6a.cc
莫离2026 白鹿丞磊古装大女主 海外华人免费高清陆剧 无广告全球加速体验
узнать больше https://krab6at-cc.com
Источник https://krab5-cc.at/
интернет https://krab6a.cc
Подробнее https://krab6a.cc/
Установите удобный http://mobile-mir.ru для идеального управления шторами в вашем доме.
Это устройство дает возможность автоматизировать открытие и закрытие штор без физических усилий.
Такие системы становятся все популярнее благодаря своему удобству и функциональности. Они особенно востребованы в помещениях с высокими окнами или труднодоступными карнизами.
#### **2. Преимущества электрокарнизов**
Главное достоинство электрокарниза — это удобство использования. Управление происходит с пульта или даже через смартфон, что делает процесс максимально простым.
Кроме того, электрокарнизы отличаются высокой надежностью и долговечностью. Производители предлагают гарантию на несколько лет, подтверждая качество продукции.
#### **3. Установка и настройка**
Монтаж электрокарниза требует определенных навыков и точности. Лучше доверить эту работу профессионалам, чтобы избежать ошибок.
После установки нужно правильно настроить систему управления. В некоторых моделях можно задавать индивидуальные сценарии работы.
#### **4. Выбор подходящей модели**
При покупке электрокарниза важно учитывать несколько факторов. В первую очередь, нужно определить максимальный вес штор, которые будет выдерживать система.
На рынке представлены модели разных ценовых категорий. Премиальные электрокарнизы оснащены дополнительными опциями, такими как датчики освещенности.
—
### **Спин-шаблон**
#### **1. Введение**
Их востребованность растет из-за простоты использования и технологичности.
#### **2. Преимущества электрокарнизов**
Они также известны своей устойчивостью к механическим повреждениям.
#### **3. Установка и настройка**
Для правильного монтажа важно учитывать особенности конструкции.
#### **4. Выбор подходящей модели**
Немаловажным критерием является дизайн, который должен гармонировать с интерьером.
продолжить https://krab5-cc.at
узнать больше https://krab6at-cc.com/
пояснения https://krab6at-cc.com/
узнать https://krab6a.cc
такой https://krab5-cc.at/
ссылка на сайт https://krab5-cc.at
посмотреть в этом разделе https://krab6at-cc.com
нажмите https://krab6at-cc.com/
ссылка на сайт https://krab5-cc.at
Следующая страница https://krab6a.cc/
Подробнее https://krab6at-cc.com/
перенаправляется сюда https://krab6a.cc
страница https://krab6a.cc
Источник https://krab5-cc.at/
здесь https://krab5-cc.at
Главная https://krab5-cc.at/
опубликовано здесь https://krab6a.cc/
в этом разделе https://krab5-cc.at
этот сайт https://krab6at-cc.com
взгляните на сайте здесь https://krab6at-cc.com/
взгляните на сайте здесь https://krab6at-cc.com/
Читать далее https://krab6at-cc.com
Подробнее https://krab6at-cc.com
Главная https://krab5-cc.at/
смотреть здесь https://krab5-cc.at
Читать далее https://krab6a.cc/
посетить сайт https://krab5-cc.at/
другие https://krab6at-cc.com
здесь https://krab5-cc.at/
сайт https://krab6at-cc.com
Подробнее https://krab5-cc.at
узнать больше https://krab5-cc.at/
этот контент https://krab5-cc.at/
Смотреть здесь https://krab6a.cc
веб-сайте https://krab5-cc.at
здесь https://krab6a.cc/
сайт https://krab6at-cc.com
нажмите, чтобы подробнее https://krab6at-cc.com
продолжить https://krab6at-cc.com
опубликовано здесь https://krab6at-cc.com
зайти на сайт https://krab5-cc.at
веб-сайте https://krab6at-cc.com/
узнать больше Здесь https://krab5-cc.at/
подробнее здесь https://krab5-cc.at/
другие https://krab6at-cc.com/
ссылка на сайт https://krab6a.cc
узнать больше https://krab6at-cc.com
в этом разделе https://krab6a.cc/
зайти на сайт https://krab6at-cc.com
посмотреть в этом разделе https://krab5-cc.at/
посетить веб-сайт https://krab6a.cc/
на этом сайте https://krab5-cc.at
нажмите https://krab6a.cc
подробнее https://krab6a.cc
перейти на сайт https://krab6a.cc/
Подробнее здесь https://krab6a.cc
ссылка на сайт https://krab6at-cc.com
подробнее здесь https://krab6a.cc
читать https://krab5-cc.at
каталог https://krab5-cc.at/
Thanks for the post. https://m3u8-player.net/
узнать больше Здесь https://krab6a.cc
нажмите здесь https://krab6a.cc/
Продолжение https://krab6a.cc/
взгляните на сайте здесь https://krab6a.cc
интернет https://krab5-cc.at/
一帆平台2026 海外华人高清视频直播 智能AI优化体验
Смотреть здесь https://krab6at-cc.com/
узнать больше https://krab5-cc.at/
содержание https://krab5-cc.at
узнать водкабет
перенаправляется сюда https://krab5-cc.at
Продолжение водка бэт
такой https://krab5-cc.at
посмотреть в этом разделе водка бет
узнать больше Здесь зеркало водка бет
смотреть здесь vodka bet casino
интернет водкабет
Современные Схема подключения рулонной шторы с электроприводом Прокарниз не только облегчают контроль освещенности в помещении, но и добавляют комфорта в ваш интерьер.
Они различаются по размеру, дизайну, материалам и типу управления.
кликните сюда водкабет
Перейти на сайт vodkabet
веб-сайте водка бет
на этом сайте vodka bet casino
веб-сайт водка бэт
содержание водкабет
страница vodka bet casino
можно проверить ЗДЕСЬ vodka bet casino
проверить сайт водка бет
выберите ресурсы водка бэт
можно проверить ЗДЕСЬ водка бет
нажмите здесь зеркало водка бет
нажмите здесь vodkabet
нажмите, чтобы подробнее vodkabet
ссылка на сайт водка бет
содержание водкабет
узнать больше vodka bet casino
Следующая страница зеркало водка бет
Подробнее здесь водкабет
Продолжение vodka bet casino
в этом разделе водка бет
можно проверить ЗДЕСЬ vodkabet
такой vodkabet
найти это vodkabet
посетить веб-сайт vodka bet casino
перейдите на этот сайт водкабет
этот контент водка бэт
узнать водкабет
Источник водка бет
нажмите vodkabet
веб-сайт водка бэт
посмотреть на этом сайте водка бэт
Источник vodkabet
посмотреть на этом сайте vodka bet casino
Источник водка бэт
нажмите, чтобы подробнее зеркало водка бет
читать vodka bet casino
взгляните на сайте здесь водка бет
этот контент vodkabet
кликните сюда зеркало водка бет
подробнее водка бэт
проверить сайт водка бэт
этот сайт vodkabet
продолжить водкабет
“аренда инструмента в слуцке – выгодные условия и широкий выбор инструментов для любых задач.”
Вместо того чтобы покупать инструмент, который может понадобиться всего несколько раз, выгоднее взять его в аренду по доступной цене.
Такой подход особенно удобен для строителей и мастеров. Многие профессионалы предпочитают брать инструмент напрокат, так как это снижает затраты на выполнение работ.
#### **2. Какой инструмент можно взять в аренду?**
В Слуцке доступен широкий ассортимент оборудования для разных задач. В прокате представлены бензопилы, газонокосилки и другая садовая техника.
Кроме того, в аренду сдают и специализированную технику. Для демонтажа предлагают отбойные молотки и мощные дрели.
#### **3. Преимущества аренды инструмента**
Главный плюс – экономия на обслуживании и хранении. Все инструменты проходят регулярное обслуживание, поэтому клиенты получают только исправные устройства.
Дополнительный бонус – помощь в выборе подходящего оборудования. Если вы не уверены в выборе, специалисты дадут профессиональный совет.
#### **4. Как оформить аренду в Слуцке?**
Процедура аренды максимально проста и прозрачна. Вы можете приехать в офис, чтобы лично выбрать подходящий инструмент.
Условия проката выгодны для всех клиентов. Стоимость аренды зависит от срока и типа инструмента.
—
### **Спин-шаблон статьи**
#### **1. Почему аренда инструмента – это выгодно?**
Аренда инструмента в Слуцке позволяет получить доступ к профессиональному оборудованию без покупки. Покупка профессионального оборудования требует больших затрат, а аренда дает доступ к качественному инструменту без лишних расходов .
Такой подход особенно удобен для компаний и частных клиентов. Многие профессионалы предпочитают брать инструмент напрокат, так как это снижает затраты на выполнение работ .
#### **2. Какой инструмент можно взять в аренду?**
В Слуцке доступен широкий ассортимент оборудования для разных задач . Для строительных работ доступны бетономешалки, виброплиты и леса.
Кроме того, в аренду сдают и оборудование для узких задач. Для укладки плитки можно взять плиткорезы, а для покраски – краскопульты .
#### **3. Преимущества аренды инструмента**
Главный плюс – доступ к исправному оборудованию. Арендуя оборудование, вы избегаете затрат на его хранение и транспортировку .
Дополнительный бонус – консультации профессионалов . Если вы не уверены в выборе, специалисты дадут профессиональный совет.
#### **4. Как оформить аренду в Слуцке?**
Процедура аренды максимально проста и прозрачна . Вы можете приехать в офис, чтобы лично выбрать подходящий инструмент .
Условия проката адаптированы под разные потребности . Стоимость аренды зависит от срока и типа инструмента .
можно проверить ЗДЕСЬ vodkabet
выберите ресурсы vodkabet
нажмите, чтобы подробнее водкабет
веб-сайт водкабет
на этом сайте vodka bet casino
Следующая страница водкабет
Читать далее водкабет
здесь vodka bet casino
страница vodkabet
Подробнее vodkabet
Источник водка бет
Читать далее зеркало водка бет
пояснения vodka bet casino
Читать далее водка бэт
этот контент vodka bet casino
ссылка на сайт зеркало водка бет
Перейти на сайт водка бет
пояснения зеркало водка бет
Узнать больше водка бэт
этот контент водка бет
нажмите vodkabet
найти это водка бет
Check our new web page — https://flashparade.ru/wp-includes/jks/1xbet___promokod_bonus.html
Посетите сайт компании прямо сейчас > https://www.naskaplaza.ru/media/pgs/1xbet_promokod_bonus_na_pervuy_depozit.html
Следующая страница https://bestchangesru.com
в этом разделе https://bestchangesru.com
перейти на сайт https://bestchangesru.com/
сюда https://bestchangesru.com/
Go to the verified website : https://cherwellcricketleague.com/img/pgs/code_promo___bonus_jusqu____130.html
pg slot
PG Slot แพลตฟอร์มเกมสล็อตยอดนิยม ใช้งานง่าย ฝากถอนรวดเร็ว
คำค้นหา PG Slot ถูกค้นหามากขึ้นเรื่อยๆ ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น ผู้ให้บริการเกมสล็อตที่มาแรง ด้าน กราฟิก ความ ลื่นไหล และ ระบบจ่ายที่ดึงดูด เกมของ PG ออกแบบโดยทีมงานมืออาชีพ ที่รองรับการเล่นทั้งบน โทรศัพท์มือถือ และ คอมพิวเตอร์
ความโดดเด่น ของ สล็อต PG
pg slot เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ โหลดเร็ว เล่นผ่าน ระบบอัตโนมัติ และรองรับ ทั้ง iOS และ Android เข้าเล่นผ่านเว็บได้เลย ผู้เล่นสามารถเข้าเล่นผ่าน หน้าเว็บ ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ 3D ให้ความคมชัด พร้อมเอฟเฟกต์ สมจริง
คุณสมบัติหลักของเกม สล็อต PG ได้แก่
ระบบโบนัสและฟรีสปินหลากหลายรูปแบบ
Multiplier
โหมดทดลองเล่นฟรี
มีเมนูภาษาไทย
ระบบการเงินรวดเร็ว ทำรายการไว
แพลตฟอร์ม pg slot ส่วนใหญ่รองรับ การฝาก-ถอน ออโต้ตลอด 24 ชม. ขั้นต่ำเริ่มต้นเพียง 1 บาท ขึ้นอยู่กับ เงื่อนไขของเว็บไซต์ การทำรายการใช้เวลา เพียงไม่กี่วินาที ผ่าน คิวอาร์โค้ด หรือระบบ Mobile Banking ทำให้ธุรกรรมเป็นไปอย่าง ต่อเนื่อง
ประเภทเกมยอดนิยม ใน pg slot
เกม pg slot มีธีมหลากหลาย เช่น
ธีม เทพเจ้า
ธีม ผจญภัย
ธีม ความมั่งคั่ง
ธีม Animal
ผู้เล่นนิยมเกมที่มีรอบพิเศษบ่อย พร้อมระบบ โบนัสรอบพิเศษ และ โอกาสทำกำไรสูง เหมาะกับทั้ง ผู้เล่นเริ่มต้น และ ผู้เล่นมือโปร
ความน่าเชื่อถือ
สล็อต PG พัฒนาในระบบสากล มีการ รักษาความปลอดภัย และใช้ระบบสุ่มผล ระบบสุ่มมาตรฐาน เพื่อให้ผลลัพธ์ ยุติธรรม แพลตฟอร์มที่ให้บริการ สล็อต PG ควรมี ระบบดูแลข้อมูล
สรุป
pg slot เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน โบนัสหลากหลาย และการทำธุรกรรมที่ รวดเร็ว ผู้เล่นสามารถเริ่มต้นได้ ง่าย ฝากถอนสะดวก และเลือกเกมได้ ครบทุกหมวด เหมาะสำหรับ ทั้งมือใหม่และมือโปร ในโลกของเกมสล็อตออนไลน์
посмотреть на этом сайте Купить ооо
посетить веб-сайт Усн, осно
Читать далее Купить ооо
узнать больше Камеральная, выездная проверка
выберите ресурсы Помощь 115, зск
Главная Регистрация ооо, ип, внесение егрюл
опубликовано здесь Купить фирму
перенаправляется сюда Оптимизация налогооблажения
интернет Поиск информации
другие Усн, осно
узнать Открытие счета
Перейти на сайт Поиск информации
на этом сайте Оптимизация налогооблажения
check out here https://Zd.gl
нажмите здесь Купить ооо
my explanation https://Zd.gl
top article https://Zd.gl/
каталог Регистрация ооо, ип, внесение егрюл
advice https://Zd.gl/
выберите ресурсы Купить фирму
browse around here https://Zd.gl
Перейти на сайт Купить фирму
anchor https://Zd.gl
her explanation https://Zd.gl/
опубликовано здесь Поиск информации
найти это Купить фирму
look at this now https://Zd.gl/
blog here https://Zd.gl/
сюда Регистрация ооо, ип, внесение егрюл
hop over to this web-site https://Zd.gl
more helpful hints https://Zd.gl/
Узнать больше Реорганизация
page https://Zd.gl
нажмите здесь Бухгалтерские услуги
подробнее Бухгалтерские услуги
здесь Усн, осно
article source https://Zd.gl
index https://Zd.gl
find more information https://Zd.gl/
страница Помощь 115, зск
right here https://Zd.gl
веб-сайте Регистрация ооо, ип, внесение егрюл
страница Открытие счета
Источник Бухгалтерские услуги
выберите ресурсы Учредительные уставные документы
additional hints https://Zd.gl/
visit the website https://Zd.gl/
Bonuses https://Zd.gl
pop over to this web-site https://Zd.gl/
review https://Zd.gl
web link https://Zd.gl/
explanation https://Zd.gl
important site https://Zd.gl
visit this web-site https://Zd.gl
find this https://Zd.gl
blog https://Zd.gl/
check it out https://Zd.gl/
奥美迦奥特曼高清完整版2026 海外华人动漫免费观看
нажмите здесь Купить ооо
Источник Как Не платить налоги законно
посетить сайт Купить ооо
пояснения Купить ооо
i was reading this https://Zd.gl
find more https://Zd.gl
на этом сайте Купить ооо
Brest vs Marseille – 2026 Ligue 1 blockbuster 20:45! Can Marseille steal points on the road? French football latest match results incoming!
в этом разделе Усн, осно
成何体统2026 丞磊王楚然 双穿书甜宠 高清现代穿越恋爱 无广告高清追剧
Смотреть здесь Оптимизация ндс
look here https://Zd.gl/
一帆视频海外华人首选2026 华语美剧日剧 高清在线观看
узнать больше Купить фирму
ссылка на сайт Регистрация ооо, ип, внесение егрюл
Continue https://Zd.gl
go to the website https://Zd.gl
опубликовано здесь Помощь 115, зск
like this https://Zd.gl/
посетить сайт Купить фирму
Перейти на сайт Купить фирму
Читать далее Учредительные уставные документы
check out this site https://Zd.gl
go https://Zd.gl
Going Here https://Zd.gl/
Bayern’s Kompany: “Leroy Sané is our funniest player” – 2026 football news gem! Bundesliga scores + fun vibes!
directory https://Zd.gl
check over here https://Zd.gl/
anonymous https://Zd.gl/
интернет Реорганизация
сюда Усн, осно
Подробнее Реорганизация
pop over here https://Zd.gl/
взгляните на сайте здесь Регистрация ооо, ип, внесение егрюл
Our site https://Zd.gl/
подробнее Оптимизация ндс
helpful site https://Zd.gl/
blog here https://Zd.gl
สล็อต
แพลตฟอร์ม TKBNEKO มอบมิติใหม่ของเกมออนไลน์ ฝาก-ถอนไว ด้วยระบบสแกน คิวอาร์โค้ด
ในยุคดิจิทัลที่ โลกออนไลน์เติบโตต่อเนื่อง เรามุ่งเน้นมาตรฐานใหม่ของการเดิมพัน ด้วยระบบที่ ทันสมัย เสถียร และ ตรวจสอบได้ เพื่อให้ผู้เล่น มั่นใจ ทุกครั้งที่ใช้งาน
ระบบการเงินที่ใช้งานง่าย
ฝากขั้นต่ำ: เริ่มต้น 1 บาท
ถอนขั้นต่ำ: 1 บาท
เวลาฝากเงิน: ภายใน 3 วินาที
ยอดถอน: ไม่จำกัดต่อวัน
เติมเงินง่าย แค่สแกน
สแกน คิวอาร์ ระบบจะ โอนเงินเข้าทันที ขั้นต่ำ เริ่ม 100 บาท สูงสุด 500,000 บาท
หมวดหมู่เกม
สล็อต: ธีมหลากหลาย
เกมสด: คาสิโนเรียลไทม์
กีฬา: แมตช์ทั่วโลก
ยิงปลา: สนุกได้เงินจริง
โบนัสและโปรโมชัน
ติดตามหน้า โปรโมชั่น พร้อมระบบ สมาชิกพรีเมียม และโปรแกรม พันธมิตร
ฝ่ายบริการลูกค้า
สอบถามข้อมูลได้ตลอด 24 ชั่วโมง ผ่านหน้า ศูนย์ช่วยเหลือ ทีมงาน TKBNEKO พร้อมดูแลตลอดเวลา
New online casino Australia 2026 huge welcome bonuses free spins
实习医生风云第十季2026 海外华人医疗喜剧回归 高清经典续集
New online casino Australia 2026 huge welcome bonuses free spins
Sassuolo vs Hellas Verona 2026 Serie A 19:45最新比分,意甲维罗纳客场挑战萨索洛,意大利足球比分直播更新。
爱壹帆海外版2026 海外华人高清视频平台 全球加速无广告
pg slot เกมสล็อตออนไลน์ที่คนค้นหาเยอะ เล่นง่าย ฝากถอนเร็ว
คำค้นหา PG Slot กำลังได้รับความนิยมอย่างต่อเนื่อง ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น ค่ายเกมที่มีชื่อเสียง ด้าน งานภาพคุณภาพสูง ความ เสถียร และ โอกาสรับกำไรที่ดี เกมของ PG ออกแบบโดยทีมงานมืออาชีพ ที่รองรับการเล่นทั้งบน มือถือ และ เดสก์ท็อป
จุดเด่น ของ PG Slot
pg slot เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ เข้าเกมไว เล่นผ่าน ระบบอัตโนมัติ และรองรับ ทั้ง iOS และ Android ไม่ต้องดาวน์โหลดแอป ผู้เล่นสามารถเข้าเล่นผ่าน เว็บเบราว์เซอร์ ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ สามมิติ ให้ความคมชัด พร้อมเอฟเฟกต์ จัดเต็ม
คุณสมบัติหลักของเกม สล็อต PG ได้แก่
มีรอบโบนัสให้ลุ้นบ่อย
ฟีเจอร์ตัวคูณรางวัล
เล่นฟรีก่อนเติมเงิน
ใช้งานภาษาไทยง่าย
ระบบฝากถอนสะดวก ไม่ต้องรอนาน
แพลตฟอร์ม PG Slot มักมี การฝาก-ถอน ฝากถอนตลอดเวลา ขั้นต่ำเริ่มต้นเพียง หลักหน่วย ขึ้นอยู่กับ เงื่อนไขของเว็บไซต์ การทำรายการใช้เวลา เพียงไม่กี่วินาที ผ่าน QR Code หรือระบบ แอปธนาคาร ทำให้ธุรกรรมเป็นไปอย่าง ไม่สะดุด
แนวเกมที่คนเล่นเยอะ ใน PG Slot
เกม pg slot มีธีมหลากหลาย เช่น
ธีม เทพเจ้า
ธีม Adventure
ธีม โชคลาภ
ธีม Animal
เกมยอดนิยมมักเป็นเกมที่แตกง่าย พร้อมระบบ Special Feature และ อัตราการจ่ายที่สูง เหมาะกับทั้ง ผู้เล่นเริ่มต้น และ ผู้เล่นมือโปร
ความปลอดภัย
PG Slot มีมาตรฐานรองรับ มีการ รักษาความปลอดภัย และใช้ระบบสุ่มผล RNG เพื่อให้ผลลัพธ์ โปร่งใส แพลตฟอร์มที่ให้บริการ สล็อต PG ควรมี ระบบดูแลข้อมูล
สรุป
สล็อต PG เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน โบนัสหลากหลาย และการทำธุรกรรมที่ รวดเร็ว ผู้เล่นสามารถเริ่มต้นได้ ไม่ซับซ้อน ฝากถอนสะดวก และเลือกเกมได้ หลากหลายแนว เหมาะสำหรับ ผู้เล่นทุกสไตล์ ในโลกของเกมสล็อตออนไลน์
2026 football news: Forest’s 3-0 masterclass in Europa League sets tone – latest match results show Premier League clubs dominating Europe!
艾一帆海外版2026 高清视频平台 全球加速 动漫专区
Panathinaikos 2-2 Viktoria Plzen 2026 Europa League draw! Greeks fight back – football scores drama all night long!
驕陽似我续集2026 高清现偶甜宠 海外华人必备 AI推荐个性化观看
纽卡斯尔6-1狂屠卡拉巴赫!2026欧冠附加赛炸裂比分,戈登半场大四喜,喜鹊强势杀入淘汰赛,最新足球赛事比分太燃了!
What stands out most is how your sentences carry both precision and warmth, which is a rare balance in today’s fast-paced online writing.lucky draw
Смотреть здесь https://lzt.market/
подробнее здесь https://lolz.live
перенаправляется сюда https://lzt.market
Узнать больше https://lolz.live/
содержание https://lolz.live/
здесь https://lolz.live
сайт https://lzt.market
интернет https://lzt.market/
узнать больше Здесь https://lzt.market
сюда https://lolz.live
выберите ресурсы https://lzt.market
кликните сюда https://lolz.live/
посмотреть в этом разделе https://lolz.live
веб-сайте https://lolz.live/
посмотреть на этом сайте https://lolz.live
можно проверить ЗДЕСЬ https://lolz.live/
Читать далее https://lolz.live/
другие https://lolz.live/
подробнее https://lolz.live
нажмите здесь https://lzt.market
другие https://lolz.live
выберите ресурсы https://lolz.live/
Перейти на сайт https://lolz.live/
Подробнее здесь https://lzt.market/
можно проверить ЗДЕСЬ https://lzt.market/
этот контент https://lzt.market
веб-сайте https://lolz.live
посмотреть на этом сайте https://lzt.market
нажмите https://lzt.market/
интернет https://lolz.live
проверить сайт https://lzt.market/
перейти на сайт https://lzt.market
посетить веб-сайт https://lolz.live
нажмите здесь https://lolz.live
Подробнее здесь https://lzt.market
взгляните на сайте здесь https://lzt.market
продолжить https://lzt.market/
на этом сайте https://lolz.live/
такой https://lzt.market/
Главная https://lolz.live
можно проверить ЗДЕСЬ https://lolz.live
страница https://lolz.live/
взгляните на сайте здесь https://lolz.live
найти это https://lolz.live/
на этом сайте https://lolz.live
узнать https://lzt.market/
Подробнее https://lolz.live/
найти это https://lzt.market/
Источник https://lolz.live
каталог https://lzt.market/
нажмите, чтобы подробнее https://lolz.live
нажмите https://lolz.live/
Подробнее https://lzt.market
узнать больше Здесь https://lzt.market/
проверить сайт https://lzt.market
веб-сайт https://lzt.market/
на этом сайте https://lzt.market
опубликовано здесь https://lolz.live/
Смотреть здесь https://lolz.live
узнать больше https://lzt.market
проверить сайт https://lolz.live/
веб-сайте https://lzt.market
Следующая страница https://lzt.market
продолжить https://lolz.live/
страница https://lzt.market
этот сайт https://lzt.market
перенаправляется сюда https://lzt.market/
веб-сайт https://lolz.live/
Следующая страница https://lzt.market/
этот контент https://lolz.live
здесь https://lolz.live/
Experience thrilling wins and endless entertainment at 777 bet Casino, your ultimate destination for online gaming.
Users can benefit from regular bonuses and promotional offers that increase their betting power.
小城大事2026 赵丽颖黄晓明 高清农民造城励志 海外华人免费热播 全球加速
Смотреть здесь https://lzt.market
выберите ресурсы https://lzt.market/
содержание https://lzt.market/
зайти на сайт https://lzt.market/
такой https://lolz.live
нажмите здесь https://lolz.live/
здесь https://lzt.market/
найти это https://lzt.market
здесь https://lzt.market
нажмите, чтобы подробнее https://lolz.live/
Перейти на сайт https://lolz.live
перейдите на этот сайт https://lzt.market
читать https://lzt.market/
опубликовано здесь https://lzt.market
перенаправляется сюда https://lolz.live/
Узнать больше https://lzt.market/
содержание https://lolz.live
можно проверить ЗДЕСЬ https://lzt.market
зайти на сайт https://lolz.live
ссылка на сайт https://lzt.market/
зайти на сайт https://lzt.market
Главная https://lzt.market
перейдите на этот сайт https://lzt.market/
PG Slot สล็อตยอดฮิต เล่นง่าย ฝากถอนเร็ว
คำค้นหา PG Slot มาแรงในช่วงนี้ ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น ค่ายเกมที่มีชื่อเสียง ด้าน กราฟิก ความ ลื่นไหล และ อัตราการจ่ายรางวัลที่น่าสนใจ เกมของ PG ออกแบบโดยทีมงานมืออาชีพ ที่รองรับการเล่นทั้งบน โทรศัพท์มือถือ และ คอมพิวเตอร์
ข้อดี ของ PG Slot
pg slot เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ เปิดเกมได้ทันที เล่นผ่าน ระบบออนไลน์ และรองรับ ทุกอุปกรณ์ ไม่ต้องดาวน์โหลดแอป ผู้เล่นสามารถเข้าเล่นผ่าน หน้าเว็บ ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ สามมิติ ให้ความคมชัด พร้อมเอฟเฟกต์ สวยงาม
คุณสมบัติหลักของเกม pg slot ได้แก่
ระบบโบนัสและฟรีสปินหลากหลายรูปแบบ
ระบบตัวคูณ
โหมดทดลองเล่นฟรี
ใช้งานภาษาไทยง่าย
ฝากถอนง่าย ไม่ต้องรอนาน
แพลตฟอร์ม สล็อต PG มักมี การฝาก-ถอน ฝากถอนตลอดเวลา ขั้นต่ำเริ่มต้นเพียง หลักหน่วย ขึ้นอยู่กับ เงื่อนไขของเว็บไซต์ การทำรายการใช้เวลา ไม่กี่วินาที ผ่าน QR Code หรือระบบ แอปธนาคาร ทำให้ธุรกรรมเป็นไปอย่าง ไม่สะดุด
แนวเกมที่คนเล่นเยอะ ใน PG Slot
เกม pg slot มีธีมหลากหลาย เช่น
ธีม เทพเจ้า
ธีม ลุยด่าน
ธีม ความมั่งคั่ง
ธีม ธรรมชาติ
เกมยอดนิยมมักเป็นเกมที่แตกง่าย พร้อมระบบ Special Feature และ อัตราการจ่ายที่สูง เหมาะกับทั้ง คนเพิ่งเล่น และ ผู้เล่นมือโปร
ความปลอดภัย
สล็อต PG พัฒนาในระบบสากล มีการ รักษาความปลอดภัย และใช้ระบบสุ่มผล RNG เพื่อให้ผลลัพธ์ ยุติธรรม แพลตฟอร์มที่ให้บริการ สล็อต PG ควรมี ความปลอดภัยสูง
โดยภาพรวม
pg slot เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน ระบบลื่นไหล และการทำธุรกรรมที่ รวดเร็ว ผู้เล่นสามารถเริ่มต้นได้ ไม่ซับซ้อน ฝากถอนสะดวก และเลือกเกมได้ หลากหลายแนว เหมาะสำหรับ ผู้เล่นทุกสไตล์ ในโลกของเกมสล็อตออนไลน์
ทดลองเล่นสล็อต pg
แพลตฟอร์ม TKBNEKO มอบมิติใหม่ของเกมออนไลน์ ฝาก-ถอนไว ด้วยระบบสแกน คิวอาร์โค้ด
ในยุคดิจิทัลที่ เทคโนโลยีพัฒนาอย่างรวดเร็ว TKBNEKO พร้อมยกระดับการให้บริการ ด้วยระบบที่ ล้ำสมัย เสถียร และ โปร่งใส เพื่อให้ผู้เล่น อุ่นใจ ทุกครั้งที่ใช้งาน
จุดเด่นระบบฝาก-ถอน
ฝากขั้นต่ำ: เริ่มต้น 1 บาท
ถอนขั้นต่ำ: 1 บาท
เวลาฝากเงิน: ใช้เวลาเพียง 3 วินาที
ยอดถอน: ไม่จำกัดต่อวัน
เติมเงินง่าย แค่สแกน
สแกน คิวอาร์ ระบบจะ โอนเงินเข้าทันที ขั้นต่ำ เริ่ม 100 บาท สูงสุด 500,000 บาท
หมวดหมู่เกม
สล็อต: ธีมหลากหลาย
เกมสด: ดีลเลอร์สด
กีฬา: แมตช์ทั่วโลก
ยิงปลา: ลุ้นกำไรทันที
โบนัสและโปรโมชัน
ติดตามหน้า โปรโมชั่น พร้อมระบบ สมาชิกพรีเมียม และโปรแกรม แอฟฟิลิเอต
ฝ่ายบริการลูกค้า
สอบถามข้อมูลได้ตลอด 24 ชั่วโมง ผ่านหน้า ศูนย์ช่วยเหลือ ทีมงาน ของเรา พร้อมดูแลตลอดเวลา
выберите ресурсы
Не забывайте о себе!
สล็อต PG สล็อตยอดฮิต ใช้งานง่าย ฝากถอนรวดเร็ว
คำค้นหา pg slot มาแรงในช่วงนี้ ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น ค่ายเกมที่มีชื่อเสียง ด้าน กราฟิก ความ นิ่งไม่สะดุด และ โอกาสรับกำไรที่ดี เกมของ PG ผลิตโดยค่ายมาตรฐาน ที่รองรับการเล่นทั้งบน โทรศัพท์มือถือ และ พีซี
ข้อดี ของ สล็อต PG
pg slot เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ โหลดเร็ว เล่นผ่าน ระบบออนไลน์ และรองรับ ทั้ง iOS และ Android ไม่ต้องดาวน์โหลดแอป ผู้เล่นสามารถเข้าเล่นผ่าน หน้าเว็บ ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ 3D ให้ความคมชัด พร้อมเอฟเฟกต์ สมจริง
คุณสมบัติหลักของเกม pg slot ได้แก่
ระบบโบนัสและฟรีสปินหลากหลายรูปแบบ
ระบบตัวคูณ
เดโม่ฟรี
มีเมนูภาษาไทย
ระบบการเงินรวดเร็ว ไม่ต้องรอนาน
แพลตฟอร์ม pg slot มักมี การฝาก-ถอน อัตโนมัติ 24 ชั่วโมง ขั้นต่ำเริ่มต้นเพียง 1 บาท ขึ้นอยู่กับ ระบบของผู้ให้บริการ การทำรายการใช้เวลา รวดเร็วมาก ผ่าน สแกน QR หรือระบบ Mobile Banking ทำให้ธุรกรรมเป็นไปอย่าง ไม่สะดุด
ประเภทเกมยอดนิยม ใน PG Slot
เกม สล็อต PG มีธีมหลากหลาย เช่น
ธีม เทพเจ้า
ธีม Adventure
ธีม ความมั่งคั่ง
ธีม สัตว์และธรรมชาติ
หลายคนชอบเกมที่โบนัสเข้าไว พร้อมระบบ ฟีเจอร์พิเศษ และ โอกาสทำกำไรสูง เหมาะกับทั้ง คนเพิ่งเล่น และ ผู้เล่นมือโปร
มาตรฐานระบบ
สล็อต PG มีมาตรฐานรองรับ มีการ ปกป้องข้อมูลผู้เล่น และใช้ระบบสุ่มผล RNG เพื่อให้ผลลัพธ์ โปร่งใส แพลตฟอร์มที่ให้บริการ PG Slot ควรมี ความปลอดภัยสูง
สรุป
PG Slot เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน กราฟิกคุณภาพ และการทำธุรกรรมที่ รวดเร็ว ผู้เล่นสามารถเริ่มต้นได้ ทันที ฝากถอนสะดวก และเลือกเกมได้ หลากหลายแนว เหมาะสำหรับ ผู้เล่นทุกสไตล์ ในโลกของเกมสล็อตออนไลน์
каталог
The best products of Georgia!
перейти на сайт
The best products of Georgia!
Продолжение Уникальные товары только сейчас!
зайти на сайт
Грузия: удовольствия для всех!
узнать больше
All the best is here!
опубликовано здесь
Отдыхайте с радостью всегда!
подробнее здесь Загляните в мир этих товаров!
Продолжение
Казахстан: вдохновение и покой!
продолжить Unique finds in Tbilisi!
посмотреть на этом сайте Путешествие, которое стоит пройти!
Продолжение
Топ товары, которые любят!
страница
Эмоции на каждом шагу!
перейдите на этот сайт
Могилев: отдых для души.
подробнее здесь Топ товары, которые любят!
найти это
Товары, которые удивляют!
содержание
Могилев: отдых для души.
веб-сайт All the best is here!
Перейти на сайт
Вдохновение для вашего отдыха!
на этом сайте Batumi: your pleasure market!
Узнать больше
Unique products for you!
Источник Georgia: quality comes first!
посетить сайт
Грузия: удовольствия для всех!
здесь Batumi: your pleasure market!
узнать больше The best for every day!
посетить сайт Превосходные предложения для вас!
читать
Unique products for you!
каталог Georgia is your perfect choice!
интернет
Лучшие впечатления в РБ!
смотреть здесь Время для самореализации с нами!
найти это Россия: отдых, который запомнится!
смотреть здесь
Откройте для себя прекрасное!
Продолжение Загляните в мир этих товаров!
нажмите здесь
Откройте сердце Грузии!
my website android pass app
look these up pass app download
content android pass app
Продолжение продам аккаунт сайту
webpage mt gox repayment
my company buy stacked account Fortnite
webpage buy PUBG account
зайти на сайт продавать в интернете цифровые товары
опубликовано здесь где продать аккаунт бравл
подробнее здесь за сколько продать аккаунт в геншине
click to read payward trading limited
visit the website android pass app
Continue Reading buy PUBG account
look at these guys digital visual pack templates marketplace
Read More Here wallet pass app
Your perspective is both thoughtful and eye-opening. Great comment!-colorgame
продолжить какие цифровые товары можно продавать
site link buy digital creative pack templates
read this article pass app login
go sell Lost Ark account
этот контент как продавать цифровые товары на яндекс маркет
useful link the pass app
visit site mt gox payout date
в этом разделе продать аккаунт товар
взгляните на сайте здесь продать аккаунт клеш оф клеш
нажмите, чтобы подробнее алиэкспресс цифровые товары продавать там
посмотреть на этом сайте хочу продать аккаунт
find out here now pass.app
Bonuses payward trading ltd
their explanation pass app login
find more information mtgox
читать продать аккаунт с вак баном
взгляните на сайте здесь какой цифровой товар продавать
great site android pass app
веб-сайте каком сайте продать аккаунты
view it now pass wallet app for android
узнать больше продать аккаунт фейсит
web link mtgox claims
try this site sell digital graphic pack templates
original site pass app download
мелбет апк
Установить Melbet: APK, iOS и компьютер
Мобильная версия Melbet включает ставки и казино в одном интерфейсе. Доступны live-ставки, слоты, прямые трансляции, статистика и операции по счёту. Установка занимает несколько минут.
Android (APK)
Загрузите APK с официального источника, запустите установщик и подтвердите установку. При необходимости включите разрешение на установку из неизвестных источников, затем войдите в аккаунт.
iOS (iPhone)
Перейдите в App Store, введите в поиске «Melbet», выберите «Получить», после установки авторизуйтесь в системе.
ПК
Откройте официальный сайт, авторизуйтесь и добавьте ярлык на рабочий стол. Браузерная версия функционирует как отдельное приложение.
Функционал
Live-ставки с мгновенным обновлением линии, игровой раздел с тысячами игр, прямые трансляции, подробная статистика, уведомления о матчах, регистрация за минуту и поддержка 24/7.
Бонусы
После загрузки доступны приветственный бонус, акционные коды и бесплатные ставки. Правила начисления определяются регионом.
Безопасность
Скачивайте только с официального сайта, проверяйте домен, не передавайте пароль третьим лицам и включите 2FA.
Загрузка выполняется быстро, после чего открывается полный доступ Melbet.
try here mt.gox claim
look what i found payward trading ltd
читать продать аккаунт букмекерской конторы
view publisher site the pass app reviews
Подробнее продать аккаунт в тг
her explanation pass app login
discover here payward trading ltd
нажмите, чтобы подробнее за сколько можно продать аккаунт блиц
view mt gox payout date
a knockout post digital content pack templates marketplace
address android pass app
проверить сайт продать аккаунт вар тандер
читать где можно продать аккаунт стим
check this link right here now buy ranked account Valorant
click pass wallet app for android
на этом сайте продать аккаунт пабг мобайл
linked here mtgox login
find out this here exchange mt gox
Continued sell digital material pack templates
visit homepage pass app login
go to my blog wallet pass app
this contact form mtgox claims
get redirected here sell digital component pack templates store
my blog mtgox payout
каталог сколько продано аккаунтов геншин импакт
look at here now Vauld restructuring
Главная продать аккаунт с дотой 2
pop over to this website sell Call of Duty account
find more Is vauld crypto app safe
hop over to these guys sell completed account
site web the pass app reviews
find out here sell digital art pack templates
Look At This wallet pass app
see it here Vauld cryptocurrency
look at this website sell Destiny 2 account
my link pass.app
Good morning!
Explore invest mysterious strategies with interesting and valuable growth potential and watch your money grow see on the website for investment guides
Full information on the link – https://101flow.site
All the best and development in business!
Перейти на сайт продать аккаунт рок
redirected here mt gox payout
site pass wallet
нажмите здесь где продать игровой аккаунт
Extra resources pass wallet
выберите ресурсы как продавать цифровые товары в телеграм
useful reference mt gox repayment
узнать больше Здесь как продать аккаунт на плеерок
посмотреть в этом разделе продать аккаунт эпик
этот контент продам аккаунт недорого
подробнее здесь где продать аккаунт танки блиц
посмотреть на этом сайте сколько продать аккаунт
you can try these out sell old account
view it sell Diablo 4 account
Подробнее что делать если продал аккаунт
linked here android pass app
official statement digital block pack templates marketplace
try this out buy Lost Ark account
his comment is here mt.gox
перенаправляется сюда продать аккаунт сплит
сюда продать аккаунт ворлд оф танк
look at these guys mtgox
Подробнее продать аккаунт пабг тг
click to investigate buy max level account
i was reading this mt gox payout
интернет продать аккаунт леста мир
Look At This sell digital visual pack templates
смотреть здесь продать аккаунт стендов
you can try these out mtgox payout
check out the post right here sell prime account
informative post mt gox repayment
бк melbet
Установить Melbet: APK, iOS и ПК
Приложение Melbet включает букмекерскую контору и казино в едином приложении. Пользователю доступны live-ставки, казино-игры, онлайн-трансляции, аналитика и операции по счёту. Установка занимает 1–2 минуты.
Android (APK)
Загрузите APK с официального сайта, запустите установщик и подтвердите установку. Если требуется включите доступ к установке сторонних приложений, затем войдите в аккаунт.
iOS (iPhone)
Откройте App Store, введите в поиске «Melbet», выберите «Получить», после установки выполните вход.
ПК
Откройте официальный сайт, авторизуйтесь и создайте ярлык на рабочий стол. Браузерная версия функционирует как отдельное приложение.
Функционал
Live-ставки с обновлением коэффициентов, игровой раздел с тысячами игр, просмотр матчей, подробная статистика, уведомления о матчах, быстрая регистрация и круглосуточная служба поддержки.
Бонусы
После установки доступны приветственный бонус, промокоды и бесплатные ставки. Условия зависят от региона.
Безопасность
Скачивайте только с официального сайта, контролируйте адрес сайта, не передавайте пароль третьим лицам и активируйте двухфакторную аутентификацию.
Загрузка выполняется быстро, после чего открывается полный доступ Melbet.
Click Here buy Apex Legends account
official statement mt.gox claim
этот контент продать аккаунт бк
directory mt.gox
такой продать аккаунт raid
на этом сайте продать аккаунт стендов
have a peek at this website digital media pack templates marketplace
check my reference mtgox claims
go to the website pass.app
his response sell FC account
нажмите здесь продать аккаунт фортнайт
dig this sell account with rare skins
Learn More Here sell digital resource pack templates store
Смотреть здесь продать аккаунт с ваком
проверить сайт продать аккаунт ворлд танк
official statement pass wallet app for android
Recommended Reading digital component pack templates marketplace
original site digital asset pack templates marketplace
Recommended Site mt gox payout
see here buy Valorant account
explanation mt.gox claim
Читать далее продать аккаунт ворлд оф танк
webpage pass app
перейдите на этот сайт продам аккаунт вар
check this site out buy GTA 5 Online account
useful site buy FIFA coins
узнать больше продать аккаунт с ваком
Web Site digital theme pack templates marketplace
you can find out more sell high rank account
see this page mtgox payout date
see it here pass wallet
ссылка на сайт где можно продать аккаунт стим
try here pass wallet
look these up pass app
look at here now pass wallet
recommended you read mtgox login
читать продать аккаунт боту
check out the post right here android pass app
visit the website wallet pass app
pop over to this web-site sell digital creative pack templates
перейдите на этот сайт продать аккаунт фк мобайл
other mtgox payout date
see this mt gox repayment
этот сайт зачем продают аккаунты
next page exchange mt gox
страница за сколько продать аккаунт геншин
more tips here online digital asset pack templates
hop over to these guys android pass app
click here for more pass.app
go to these guys sell Fortnite account
that site sell Steam account with library
узнать продам аккаунт вар
go pass app
additional hints sell OSRS account
you could check here android pass app
Continued pass app download
go to this website sell digital theme pack templates
содержание продать аккаунт роблокс быстро
useful site sell Lost Ark account
learn the facts here now sell digital graphic pack templates
visite site sell GTA 5 modded account
Продолжение продать аккаунт роблокс
YOURURL.com pass app download
try this site mt gox repayment
pop over to this web-site pass wallet
перейти на сайт продать аккаунт star
кликните сюда не вздумай продавать аккаунт в тг маразм
узнать больше продают ли аккаунты на авито
взгляните на сайте здесь продать аккаунт фонбет
Visit Website the pass app
check this site out sell digital art pack templates
here pass wallet app for android
click reference sell high rank account
he has a good point sell high rank account
More hints pass app
Going Here buy EA Sports FC account
index digital art pack templates marketplace
click for more info mtgox claims
read this sell Lost Ark account
this website payward trading ltd
look at here mtgox claims
site link pass wallet
linked here the pass app reviews
explanation wallet pass app
his comment is here mtgox
image source exchange mt gox
you can check here payward trading limited
see page mtgox payout date
their explanation mtgox claims
website here android pass app
this link mtgox login
helpful hints pass app
this content pass app
find mtgox login
click over here now mt gox payout date
go to these guys mtgox payout date
click reference mt.gox claim
see this site mt gox payout
go to this website mt gox repayment
go right here mtgox login
discover this mtgox login
find more info wallet pass app
visit homepage mtgox
weblink pass wallet app for android
you could look here payward trading ltd
pop over to these guys pass app download
straight from the source pass app download
Click This Link https://anycoindirect.me/
website link https://mixmy.money
my review here https://yomix.biz
visite site https://anycoindirect.me/
check out this site https://swaplab.io
her latest blog https://daobase.online/
over here https://letsexchange.cc/
pop over to this website https://swaplab.io
review https://daobase.online
Read Full Report https://yomix.biz
their explanation https://bitmix.app/
look what i found https://bitmix.app/
Read Full Report https://mixmy.money/
helpful site https://daobase.io
have a peek at these guys https://daobase.online/
navigate here https://bitmix.app
investigate this site https://daobase.io
check my blog https://anycoindirect.me
go to my site https://swaplab.io
you could check here https://yomix.biz
Learn More https://anycoindirect.me/
try this out https://mixmy.money/
like it https://letsexchange.cc
Find Out More https://mixmy.money/
try here https://tornadocash.app/
this link https://bitmix.app
have a peek at this website https://yomix.biz
try this site https://swaplab.io
learn this here now https://bitmix.app/
Recommended Site https://tornadocash.app
learn this here now https://mixmy.money/
you can find out more https://daobase.io/
additional hints https://anycoindirect.me/
check my source https://tornadocash.app
see https://yomix.biz
you can look here https://tornadocash.app
see this site https://daobase.info/
additional reading https://bitmix.app/
navigate to this website https://tornadocash.app
anchor https://daobase.io
navigate here https://yomix.biz/
imp source https://tornadocash.app/
you can try these out https://mixmy.money
pop over to this site https://anycoindirect.me/
here are the findings https://tornadocash.app/
look at this now https://bitmix.app/
official site https://tornadocash.app/
Full Article https://daobase.info/
look at here https://mixmy.money
pop over here https://daobase.info/
description https://mixmy.money/
over at this website https://swaplab.io
Related Site https://anycoindirect.me
check https://bitmix.app/
go to this web-site https://yomix.biz/
click this link now https://mixmy.money
redirected here https://tornadocash.app/
helpful site https://letsexchange.cc
site link https://daobase.online
get redirected here https://tornadocash.app/
view publisher site https://yomix.biz
try this website https://yomix.biz
visit the site https://letsexchange.cc
Good afternoon!
Master the use of interesting mysterious markets for valuable investment strategies and grow your portfolio wisely see on the website for market strategies
Full information on the link – https://202fliks.site
All the best and development in business!
published here https://daobase.io
go to this website https://swaplab.io/
see post https://daobase.online
find out here https://daobase.online
look at here https://bitmix.app/
click here to find out more https://mixmy.money/
Туристам на заметку на какие экскурсии съездить на Пхукете
view website https://bitmix.app/
see it here https://tornadocash.app
look at this now https://daobase.online
click this link here now https://anycoindirect.me/
you can check here https://anycoindirect.me/
visite site https://bitmix.app
directory https://swaplab.io
find more information https://daobase.info/
websites https://tornadocash.app/
recommended you read https://swaplab.io
additional info https://daobase.info
pop over here https://anycoindirect.me
visit the site https://bitmix.app/
continue reading this https://daobase.online/
resource https://anycoindirect.me/
her response https://yomix.biz/
Туристам на заметку лучшие экскурсии на Пхукете отзывы 2026
Click This Link https://daobase.info
reference https://swaplab.io/
Discover More https://daobase.online/
продолжить kraken ссылка на сайт
news https://bitmix.app
her response https://bitmix.app
like it https://letsexchange.cc/
redirected here https://mixmy.money/
see this site https://mixmy.money/
additional info https://letsexchange.cc/
найти это kra ссылка
можно проверить ЗДЕСЬ kraken сайт зеркала
сайт кракен даркнет
кликните сюда кракен онион тор
выберите ресурсы кракен darknet
каталог kraken рабочая ссылка onion
веб-сайт кракен ссылка
Смотреть здесь кракен ссылка kraken
Курьер пунктуальный, вручил красиво. Цветы свежие, сервис радует!
заказать цветы томск
веб-сайт сайт kraken onion
веб-сайте kraken сайт
интернет kraken ссылка зеркало
For those seeking an exceptional online gaming experience, us.com](https://maxispin.us.com/) stands out as a premier destination. At Maxispin Casino, players can enjoy a vast array of pokies, table games, and other thrilling options, all accessible in both demo and real-money modes. The casino offers attractive bonuses, including free spins and a generous welcome offer, along with cashback promotions and engaging tournaments. To ensure a seamless experience, Maxispin provides various payment methods, efficient withdrawal processes, and reliable customer support through live chat. Security is a top priority, with robust safety measures and a strong focus on responsible gambling tools. Players can easily navigate the site, with detailed guides on account creation, verification, and payment methods. Whether you’re interested in high RTP slots, hold and win pokies, or the latest slot releases, Maxispin Casino delivers a user-friendly and secure platform. Explore their terms and conditions, read reviews, and discover why many consider Maxispin a legitimate and trustworthy choice in Australia.
The platform provides state-of-the-art tools to create unique and captivating text content.
**Features of MaxiSpin.us.com**
The interface of MaxiSpin.us.com is intuitive and easy to navigate.
**Benefits of Using MaxiSpin.us.com**
The platform is both cost-effective and efficient, offering premium content at a fraction of the cost of conventional methods.
подробнее kraken актуальные ссылки
подробнее здесь kraken ссылка на сайт
в этом разделе kraken onion ссылка
на этом сайте кракен онион зеркало
сюда kraken darknet market
продолжить kraken onion
Продолжение kraken зеркало рабочее
Продолжение kraken онион
на этом сайте kraken официальные ссылки
посмотреть на этом сайте кракен darknet
сайт https://app.reim.ink/#
веб-сайт https://app.reim.ink/#
этот контент kraken зеркало рабочее
ссылка на сайт кракен онион зеркало
подробнее https://app.reim.ink/#/
в этом разделе https://app.reim.ink/#/
смотреть здесь kraken сайт зеркала
сюда kraken сайт зеркала
Туристам на заметку лучшие экскурсии на Пхукете отзывы 2026
подробнее kraken зеркало
страница kraken сайт
Туристам на заметку самые лучшие экскурсии на Пхукете
страница https://app.reim.ink/#
пояснения https://app.reim.ink/#
опубликовано здесь https://app.reim.ink/#
подробнее здесь актуальные зеркала kraken
продолжить kraken онион
зайти на сайт kraken зеркало рабочее
посмотреть в этом разделе https://app.reim.ink/#/
проверить сайт kraken зеркало
посетить сайт https://app.reim.ink/#/
узнать больше Здесь кракен онион
такой кракен darknet
нажмите здесь https://app.reim.ink/#/
ทดลองเล่นสล็อต pg เว็บ ตรง”
PG Slot สล็อตยอดฮิต ใช้งานง่าย ฝากถอนรวดเร็ว
คำค้นหา สล็อต PG กำลังได้รับความนิยมอย่างต่อเนื่อง ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น ค่ายเกมที่มีชื่อเสียง ด้าน กราฟิก ความ นิ่งไม่สะดุด และ อัตราการจ่ายรางวัลที่น่าสนใจ เกมของ PG พัฒนาโดยผู้ให้บริการชั้นนำ ที่รองรับการเล่นทั้งบน โทรศัพท์มือถือ และ พีซี
ข้อดี ของ PG Slot
PG Slot เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ เข้าเกมไว เล่นผ่าน ระบบอัตโนมัติ และรองรับ ทั้ง iOS และ Android เข้าเล่นผ่านเว็บได้เลย ผู้เล่นสามารถเข้าเล่นผ่าน หน้าเว็บ ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ 3D ให้ความคมชัด พร้อมเอฟเฟกต์ จัดเต็ม
คุณสมบัติหลักของเกม สล็อต PG ได้แก่
ระบบโบนัสและฟรีสปินหลากหลายรูปแบบ
ฟีเจอร์ตัวคูณรางวัล
เล่นฟรีก่อนเติมเงิน
รองรับภาษาไทยเต็มรูปแบบ
ระบบการเงินรวดเร็ว ไม่ต้องรอนาน
แพลตฟอร์ม สล็อต PG ส่วนใหญ่รองรับ การฝาก-ถอน ออโต้ตลอด 24 ชม. ขั้นต่ำเริ่มต้นเพียง 10 บาท ขึ้นอยู่กับ กติกาแต่ละแพลตฟอร์ม การทำรายการใช้เวลา รวดเร็วมาก ผ่าน คิวอาร์โค้ด หรือระบบ แอปธนาคาร ทำให้ธุรกรรมเป็นไปอย่าง ไม่สะดุด
แนวเกมที่คนเล่นเยอะ ใน PG Slot
เกม pg slot มีธีมหลากหลาย เช่น
ธีม เทพเจ้าและแฟนตาซี
ธีม ลุยด่าน
ธีม โชคลาภ
ธีม สัตว์และธรรมชาติ
หลายคนชอบเกมที่โบนัสเข้าไว พร้อมระบบ ฟีเจอร์พิเศษ และ ระบบจ่ายคุ้มค่า เหมาะกับทั้ง คนเพิ่งเล่น และ ผู้เล่นมือโปร
ความปลอดภัย
pg slot พัฒนาในระบบสากล มีการ รักษาความปลอดภัย และใช้ระบบสุ่มผล ระบบสุ่มมาตรฐาน เพื่อให้ผลลัพธ์ ยุติธรรม แพลตฟอร์มที่ให้บริการ pg slot ควรมี ทีมซัพพอร์ต 24 ชม.
สรุป
สล็อต PG เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน ระบบลื่นไหล และการทำธุรกรรมที่ ทันใจ ผู้เล่นสามารถเริ่มต้นได้ ไม่ซับซ้อน ฝากถอนสะดวก และเลือกเกมได้ ครบทุกหมวด เหมาะสำหรับ ทุกระดับประสบการณ์ ในโลกของเกมสล็อตออนไลน์
проверить сайт kraken онион
зайти на сайт кракен даркнет маркет
этот сайт kraken onion зеркала
содержание кракен даркнет
сайт https://app.reim.ink/#
взгляните на сайте здесь kraken onion ссылка
Перейти на сайт kraken онион
проверить сайт актуальные зеркала kraken
можно проверить ЗДЕСЬ kraken darknet market
посетить сайт кракен онион
можно проверить ЗДЕСЬ кракен онион зеркало
нажмите здесь https://app.reim.ink/#
узнать больше kraken маркетплейс зеркало
этот контент kra ссылка
ссылка на сайт kraken onion зеркала
нажмите здесь kraken маркетплейс зеркало
Перейти на сайт kraken сайт
зайти на сайт kraken onion
другие kraken официальные ссылки
перейти на сайт кракен ссылка
продолжить кракен онион зеркало
Перейти на сайт kraken зеркало
веб-сайт kra ссылка
“yesil lacivert renk uyumu” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Kendiniz gorun: https://yappendik.com/articles/lacivert-yesil-uyumu-estetik-fonksiyonellik/
Bu arada soyleyeyim, eger oyuncak markalar? konusuyla ilgileniyorsan?z, suraya bir goz at?n. Link burada: https://sevimlioyunlar.com/toy-brands/
такой kraken онион
продолжить кракен ссылка onion
สล็อต
TKBNEKO มอบมิติใหม่ของเกมออนไลน์ ฝาก-ถอนไว ด้วยระบบสแกน QR Code
ในยุคดิจิทัลที่ โลกออนไลน์เติบโตต่อเนื่อง เรามุ่งเน้นมาตรฐานใหม่ของการเดิมพัน ด้วยระบบที่ ล้ำสมัย รวดเร็ว และ โปร่งใส เพื่อให้ผู้เล่น อุ่นใจ ทุกครั้งที่ใช้งาน
ระบบการเงินที่ใช้งานง่าย
ฝากขั้นต่ำ: 1 บาท
ถอนขั้นต่ำ: ขั้นต่ำ 1 บาท
เวลาฝากเงิน: ใช้เวลาเพียง 3 วินาที
ยอดถอน: ไม่มีลิมิต
ฝากง่าย เพียงสแกน QR Code
สแกน คิวอาร์ ระบบจะ โอนเงินเข้าทันที ขั้นต่ำ 100 บาท สูงสุด ไม่เกิน 500,000 บาทต่อครั้ง
หมวดหมู่เกม
สล็อต: ธีมหลากหลาย
เกมสด: คาสิโนเรียลไทม์
กีฬา: แมตช์ทั่วโลก
ยิงปลา: ลุ้นกำไรทันที
โบนัสและโปรโมชัน
ติดตามหน้า โปรโมชั่น พร้อมระบบ สมาชิกพรีเมียม และโปรแกรม พันธมิตร
ติดต่อเรา
สอบถามข้อมูลได้ตลอด 24 ชั่วโมง ผ่านหน้า ศูนย์ช่วยเหลือ ทีมงาน ของเรา พร้อมดูแลตลอดเวลา
подробнее кракен онион
подробнее kraken onion ссылка
узнать кракен даркнет маркет
Продолжение kraken зеркало
здесь кракен ссылка
подробнее кракен ссылка kraken
Продолжение kraken сайт зеркала
другие kraken сайт
посмотреть в этом разделе сайт kraken darknet
интернет кракен ссылка
можно проверить ЗДЕСЬ kraken официальные ссылки
этот сайт kraken ссылка тор
Смотреть здесь kraken onion
Источник kraken onion ссылка
Источник kraken актуальные ссылки
смотреть здесь kraken сайт
Узнать больше kraken ссылка зеркало
сюда кракен онион
Подробнее кракен онион
Узнать больше кракен онион зеркало
каталог kraken ссылка тор
посетить сайт kraken ссылка тор
сайт kraken darknet ссылка
посмотреть в этом разделе kraken darknet market
перейдите на этот сайт kra ссылка
этот сайт кракен ссылка onion
Перейти на сайт актуальные зеркала kraken
посмотреть в этом разделе кракен onion сайт
Узнать больше kraken зеркало рабочее
веб-сайте kraken onion зеркала
Подробнее здесь kra ссылка
узнать больше kraken сайт зеркала
продолжить kraken маркетплейс зеркало
веб-сайт kra ссылка
нажмите, чтобы подробнее kraken ссылка тор
подробнее здесь kraken ссылка на сайт
перенаправляется сюда kraken darknet
Узнать больше кракен онион зеркало
перенаправляется сюда kraken darknet ссылка
ссылка на сайт кракен даркнет
Читать далее kraken ссылка на сайт
перейти на сайт кракен даркнет маркет
кликните сюда kraken маркетплейс зеркало
подробнее здесь кракен onion сайт
читать kraken онион
нажмите здесь kra ссылка
подробнее кракен darknet
узнать больше кракен даркнет маркет
другие kraken зеркало рабочее
Туристам на заметку какие экскурсии посетить на Пхукете
продолжить кракен онион
посмотреть в этом разделе kraken зеркало рабочее
посетить сайт kraken darknet ссылка
смотреть здесь kra ссылка
проверить сайт kraken онион тор
подробнее здесь кракен onion
пояснения кракен ссылка
посетить веб-сайт кракен даркнет
узнать kraken ссылка зеркало
Подробнее здесь kra ссылка
нажмите здесь кракен onion сайт
ссылка на сайт kraken darknet market
сайт актуальные зеркала kraken
узнать kraken актуальные ссылки
найти это kraken рабочая ссылка onion
узнать кракен онион
подробнее здесь kraken darknet
подробнее kraken актуальные ссылки
Перейти на сайт kraken ссылка зеркало
такой kraken онион тор
здесь кракен даркнет маркет
Узнать больше кракен ссылка kraken
Узнать больше кракен даркнет маркет
подробнее кракен onion сайт
нажмите здесь кракен онион
содержание сайт kraken onion
взгляните на сайте здесь кракен onion сайт
Смотреть здесь kraken рабочая ссылка onion
читать kraken сайт зеркала
Источник сайт kraken darknet
нажмите здесь kra ссылка
ทดลองเล่นสล็อต pg ซื้อฟรีสปิน
можно проверить ЗДЕСЬ kraken онион
Читать далее кракен даркнет маркет
здесь kraken onion
Подробнее здесь кракен ссылка onion
Источник сайт kraken darknet
посмотреть в этом разделе kraken darknet
здесь кракен онион зеркало
Подробнее кракен darknet
нажмите, чтобы подробнее кракен onion сайт
проверить сайт kraken ссылка на сайт
Источник кракен даркнет
Подробнее актуальные зеркала kraken
нажмите здесь сайт kraken darknet
перейдите на этот сайт кракен даркнет маркет
подробнее здесь кракен ссылка onion
найти это kraken актуальные ссылки
подробнее kra ссылка
посмотреть на этом сайте kraken зеркало
перейти на сайт кракен даркнет маркет
подробнее кракен даркнет маркет
посетить веб-сайт kraken зеркало
такой кракен онион зеркало
нажмите здесь кракен даркнет
веб-сайт кракен ссылка onion
ทดลองเล่นสล็อต pg ฟรี สล็อต PG เกมสล็อตออนไลน์ที่คนค้นหาเยอะ เข้าเล่นไว ฝากถอนออโต้
คำค้นหา pg slot ถูกค้นหามากขึ้นเรื่อยๆ ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น ค่ายเกมที่มีชื่อเสียง ด้าน งานภาพคุณภาพสูง ความ เสถียร และ ระบบจ่ายที่ดึงดูด เกมของ PG ผลิตโดยค่ายมาตรฐาน ที่รองรับการเล่นทั้งบน สมาร์ทโฟน และ เดสก์ท็อป
ความโดดเด่น ของ สล็อต PG
pg slot เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ โหลดเร็ว เล่นผ่าน ระบบเว็บ และรองรับ ทุกอุปกรณ์ ไม่ต้องดาวน์โหลดแอป ผู้เล่นสามารถเข้าเล่นผ่าน หน้าเว็บ ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ เอฟเฟกต์ 3 มิติ ให้ความคมชัด พร้อมเอฟเฟกต์ สวยงาม
คุณสมบัติหลักของเกม PG Slot ได้แก่
ระบบโบนัสและฟรีสปินหลากหลายรูปแบบ
ฟีเจอร์ตัวคูณรางวัล
เดโม่ฟรี
มีเมนูภาษาไทย
ระบบการเงินรวดเร็ว ไม่ต้องรอนาน
แพลตฟอร์ม PG Slot ส่วนใหญ่รองรับ การฝาก-ถอน อัตโนมัติ 24 ชั่วโมง ขั้นต่ำเริ่มต้นเพียง หลักหน่วย ขึ้นอยู่กับ กติกาแต่ละแพลตฟอร์ม การทำรายการใช้เวลา ไม่กี่วินาที ผ่าน สแกน QR หรือระบบ Mobile Banking ทำให้ธุรกรรมเป็นไปอย่าง ไม่สะดุด
ประเภทเกมยอดนิยม ใน pg slot
เกม pg slot มีธีมหลากหลาย เช่น
ธีม เทพเจ้า
ธีม ลุยด่าน
ธีม เอเชียและโชคลาภ
ธีม สัตว์และธรรมชาติ
หลายคนชอบเกมที่โบนัสเข้าไว พร้อมระบบ โบนัสรอบพิเศษ และ ระบบจ่ายคุ้มค่า เหมาะกับทั้ง คนเพิ่งเล่น และ สายสล็อตจริงจัง
ความปลอดภัย
PG Slot มีมาตรฐานรองรับ มีการ เข้ารหัสข้อมูล และใช้ระบบสุ่มผล RNG เพื่อให้ผลลัพธ์ โปร่งใส แพลตฟอร์มที่ให้บริการ PG Slot ควรมี ความปลอดภัยสูง
สรุป
pg slot เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน กราฟิกคุณภาพ และการทำธุรกรรมที่ ทันใจ ผู้เล่นสามารถเริ่มต้นได้ ง่าย ฝากถอนสะดวก และเลือกเกมได้ ครบทุกหมวด เหมาะสำหรับ ผู้เล่นทุกสไตล์ ในโลกของเกมสล็อตออนไลน์
найти это kraken официальные ссылки
Перейти на сайт кракен онион тор
этот сайт актуальные зеркала kraken
нажмите здесь kraken сайт зеркала
узнать kraken darknet ссылка
посетить веб-сайт кракен даркнет маркет
перейти на сайт сайт kraken darknet
другие сайт kraken onion
пояснения kra ссылка
веб-сайте kraken актуальные ссылки
Смотреть здесь кракен darknet
ссылка на сайт kraken onion
ссылка на сайт kraken ссылка зеркало
Продолжение кракен darknet
Туристам на заметку лучшая экскурсия на Пхукете
такой кракен онион
перенаправляется сюда kraken сайт
сайт kraken сайт
нажмите кракен ссылка
интернет kraken darknet
продолжить кракен онион зеркало
каталог кракен даркнет
Узнать больше сайт kraken darknet
смотреть здесь сайт kraken onion
пояснения kraken ссылка зеркало
подробнее kraken рабочая ссылка onion
Продолжение сайт kraken onion
подробнее здесь kraken darknet ссылка
нажмите, чтобы подробнее kraken ссылка на сайт
Продолжение сайт kraken onion
читать кракен darknet
продолжить kraken onion ссылка
Узнать больше кракен онион
здесь kraken onion ссылка
перенаправляется сюда кракен онион
продолжить kraken ссылка зеркало
нажмите здесь kraken рабочая ссылка onion
каталог https://tripscans64.cc/
Главная vodka bet
перейти на сайт vodkabet
ссылка на сайт vodka casino
узнать больше vodka casino
опубликовано здесь казино водка бет vodkabet
в этом разделе зеркало водка бет
Перейти на сайт vodkabet
зайти на сайт зеркало водка бет
веб-сайт водка бэт
выберите ресурсы казино водка бет vodkabet
Подробнее здесь водкабет
зайти на сайт vodka casino
ronaldo giyim tarz? hakk?ndaki bolumu tavsiye ederim. Link burada: https://takimgiyim.com/articles/cr7-giyim-stil-performans-konfor/
страница водка бэт
найти это водка бет
веб-сайте vodkabet
узнать больше Здесь водка бэт
ссылка на сайт casino vodka
сайт водкабет
читать vodka bet
สล็อต
TKBNEKO เปิดประสบการณ์ใหม่แห่งการเดิมพันออนไลน์ ฝาก-ถอนไว ด้วยระบบสแกน QR Code
ในยุคดิจิทัลที่ โลกออนไลน์เติบโตต่อเนื่อง TKBNEKO พร้อมยกระดับการให้บริการ ด้วยระบบที่ ทันสมัย รวดเร็ว และ โปร่งใส เพื่อให้ผู้เล่น มั่นใจ ทุกครั้งที่ใช้งาน
ระบบการเงินที่ใช้งานง่าย
ฝากขั้นต่ำ: 1 บาท
ถอนขั้นต่ำ: ขั้นต่ำ 1 บาท
เวลาฝากเงิน: ใช้เวลาเพียง 3 วินาที
ยอดถอน: ไม่จำกัดต่อวัน
เติมเงินง่าย แค่สแกน
สแกน QR Code ระบบจะ ประมวลผลอัตโนมัติ ขั้นต่ำ 100 บาท สูงสุด ไม่เกิน 500,000 บาทต่อครั้ง
หมวดหมู่เกม
สล็อต: ธีมหลากหลาย
เกมสด: ดีลเลอร์สด
กีฬา: เดิมพันลีกดัง
ยิงปลา: ลุ้นกำไรทันที
โบนัสและโปรโมชัน
ติดตามหน้า โปรโมชั่น พร้อมระบบ สมาชิกพรีเมียม และโปรแกรม พันธมิตร
ฝ่ายบริการลูกค้า
สอบถามข้อมูลได้ตลอด 24 ชั่วโมง ผ่านหน้า ศูนย์ช่วยเหลือ ทีมงาน TKBNEKO พร้อมดูแลตลอดเวลา
Подробнее здесь vodkabet
этот контент водка бет
найти это vodkabet
найти это vodkabet
выберите ресурсы vodka bet casino
этот контент водка бет
узнать больше зеркало водка бет
пояснения водка бэт
Перейти на сайт водка бет
выберите ресурсы водка бет
можно проверить ЗДЕСЬ vodka bet casino
перенаправляется сюда водка бет
читать водка бэт
посетить веб-сайт vodka bet
продолжить зеркало водка бет
продолжить vodka bet casino
опубликовано здесь https://app.reim.ink/#
over here
antivírus para notebook Positivo com 2GB de RAM
этот контент https://t.me/brosfarm_bot/
why not find out more best lightweight antivirus for Windows 10
узнать больше Здесь https://reim.ink
go to my blog
free ransomware protection software 2026
смотреть здесь https://app.reim.ink/#/
Главная https://app.reim.ink/#
страница https://reim.ink/
Подробнее https://app.reim.ink/#
зайти на сайт https://reim.ink/
use this link how to remove virus without formatting PC
перенаправляется сюда https://reim.ink
YOURURL.com remover trojan bancário Grandoreiro
пояснения https://reim.ink
More about the author protection against Pix payment scam Brazil
Читать далее https://reim.ink/
этот контент https://app.reim.ink/#/
Hello everyone!
Protect future with interesting mysterious data holding valuable scholarship keys and fund your dreams freely see on the website for scholarship lists
Full information on the link – https://dietadoktoradukana.ru/antiprobuksovochnye-traki/
All the best and development in business!
Перейти на сайт https://app.reim.ink/#/
посмотреть на этом сайте https://reim.ink/
узнать больше https://app.reim.ink/#/
imp source slow computer crypto miner virus removal
узнать больше https://t.me/brosfarm_bot
сюда https://app.reim.ink/#
взгляните на сайте здесь https://t.me/brosfarm_bot/
Read Full Article
antivírus grátis para PC fraco
этот сайт https://t.me/brosfarm_bot
интернет https://reim.ink
найти это https://reim.ink
Источник https://reim.ink/
Смотреть здесь https://reim.ink
нажмите здесь https://t.me/brosfarm_bot
click for more best lightweight antivirus for Windows 10
ссылка на сайт https://t.me/brosfarm_bot/
Главная https://reim.ink
посмотреть на этом сайте https://app.reim.ink/#
подробнее здесь https://t.me/brosfarm_bot
веб-сайте https://reim.ink/
Hello!
Reveal energy mysterious flows within interesting systems offering valuable power and harness invisible forces today see on the website for energy schematics
Full information on the link – https://lakoshka.ru/individualnye-resheniya-v-proizvodstve-plastikovoj-tary-texnologii-litya-pod-davleniem-v-sankt-peterburge/
All the best and development in business!
Bu arada, eger hello kitty cafe ankara konusuyla ilgileniyorsan?z, suraya bir goz at?n. Kendiniz gorun: https://toycenneti.com/articles/ankaradaki-hello-kitty-kafe-deneyimi/
Bu arada, eger fisher price egitici saat konusuyla ilgileniyorsan?z, buray? inceleyin. Kendiniz gorun: https://toyshediye.com/articles/fisher-price-egitici-saat-cocuk-gelisimi/
Продолжение https://reim.ink/
подробнее https://reim.ink/
страница https://t.me/brosfarm_bot
сайт https://t.me/brosfarm_bot/
find here antivírus grátis para PC fraco
узнать больше https://reim.ink/
этот сайт https://t.me/brosfarm_bot
Следующая страница https://reim.ink
этот сайт https://reim.ink/
содержание https://app.reim.ink/#/
go right here como tirar vírus que abre abas sozinho no Chrome
веб-сайте https://t.me/brosfarm_bot/
страница https://reim.ink
такой https://t.me/brosfarm_bot
пояснения https://reim.ink/
подробнее здесь https://t.me/brosfarm_bot
читать https://t.me/brosfarm_bot/
здесь https://reim.ink/
нажмите здесь https://reim.ink/
подробнее https://app.reim.ink/#/
Читать далее https://t.me/brosfarm_bot
этот контент https://reim.ink/
выберите ресурсы https://app.reim.ink/#
нажмите https://reim.ink
you can try this out protection against Pix payment scam Brazil
ссылка на сайт https://reim.ink
узнать больше Здесь https://t.me/brosfarm_bot/
подробнее здесь https://app.reim.ink/#/
посмотреть на этом сайте https://t.me/brosfarm_bot
здесь https://app.reim.ink/#
click here to investigate best lightweight antivirus for Windows 10
you could look here free antivirus for low-end PC
a fantastic read slow computer crypto miner virus removal
кликните сюда https://app.reim.ink/#/
посмотреть на этом сайте https://t.me/brosfarm_bot/
Бонусный код в букмекерской конторе — представляет собой уникальное сочетание символов, позволяющее получить специальные привилегии в букмекерской конторе: бесплатные ставки, возврат средств или дополнительные акции. Промокоды букмекеров — это специальные бонус-коды, которые активируются при создании аккаунта а также в личном кабинете. По ним можно получить freebet, бонус за регистрацию а также страховку пари. Тут представлены действующие акции по следующей ссылке http://madguy.ru/images/pgs/1xbet_promokod_pri_registracii_bonus_5.html здесь появляются новые коды и обновления списка сразу после запуска акций.
Good afternoon!
Discover music mysterious harmonies offering interesting and valuable sound data and hear the math in melody see on the website for music theory
Full information on the link – https://менщиково.рф/sekrety-plastikovogo-tsarstva-kak-iz-granul-rozhdaetsya-krasota-i-drugie-poleznye-veschi/
All the best and development in business!
подробнее здесь https://app.reim.ink/#
Читать далее https://reim.ink/
Смотреть здесь https://t.me/brosfarm_bot
выберите ресурсы https://reim.ink
Официальный интернет-сайт компании > http://www.dnstroy.com/js/pages/?promokod_1xbet_bonus_pri_registracii.html
published here free ransomware protection software 2026
Discover the thrill of real-money live casino action at best live baccarat strategies for Maxispin, where you can enjoy live dealers, top software providers, and exclusive promotions.
Helpful guides and clear menus minimize friction when users search for content.
my blog
antivirus for old laptop with 2GB RAM
you could look here antivírus para notebook Positivo com 2GB de RAM
find antivírus para notebook Positivo com 2GB de RAM
Clicking Here como tirar vírus que abre abas sozinho no Chrome
выберите ресурсы https://t.me/brosfarm_bot/
his response
melhor antivírus leve para Windows 10
опубликовано здесь https://t.me/brosfarm_bot/
Смотреть здесь https://reim.ink/
Смотреть здесь https://app.reim.ink/#
содержание https://t.me/brosfarm_bot
другие https://reim.ink/
веб-сайте https://app.reim.ink/#/
сюда https://t.me/brosfarm_bot
Читать далее https://t.me/brosfarm_bot/
ทดลองเล่นสล็อต pg ซื้อฟรีสปิน
ทดลองเล่นสล็อต pg เว็บ ตรง”
สล็อต PG สล็อตยอดฮิต เข้าเล่นไว ฝากถอนออโต้
คำค้นหา PG Slot มาแรงในช่วงนี้ ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น แบรนด์เกมที่โดดเด่น ด้าน งานภาพคุณภาพสูง ความ นิ่งไม่สะดุด และ โอกาสรับกำไรที่ดี เกมของ PG ออกแบบโดยทีมงานมืออาชีพ ที่รองรับการเล่นทั้งบน มือถือ และ เดสก์ท็อป
จุดเด่น ของ สล็อต PG
สล็อต PG เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ เข้าเกมไว เล่นผ่าน ระบบออนไลน์ และรองรับ ทุกอุปกรณ์ ไม่ต้องดาวน์โหลดแอป ผู้เล่นสามารถเข้าเล่นผ่าน เว็บเบราว์เซอร์ ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ เอฟเฟกต์ 3 มิติ ให้ความคมชัด พร้อมเอฟเฟกต์ สวยงาม
คุณสมบัติหลักของเกม pg slot ได้แก่
ระบบโบนัสและฟรีสปินหลากหลายรูปแบบ
ระบบตัวคูณ
เล่นฟรีก่อนเติมเงิน
รองรับภาษาไทยเต็มรูปแบบ
ฝากถอนง่าย ทำรายการไว
แพลตฟอร์ม PG Slot มักมี การฝาก-ถอน ออโต้ตลอด 24 ชม. ขั้นต่ำเริ่มต้นเพียง หลักหน่วย ขึ้นอยู่กับ ระบบของผู้ให้บริการ การทำรายการใช้เวลา เพียงไม่กี่วินาที ผ่าน สแกน QR หรือระบบ Mobile Banking ทำให้ธุรกรรมเป็นไปอย่าง ไม่สะดุด
ประเภทเกมยอดนิยม ใน pg slot
เกม pg slot มีธีมหลากหลาย เช่น
ธีม เทพเจ้าและแฟนตาซี
ธีม Adventure
ธีม ความมั่งคั่ง
ธีม สัตว์และธรรมชาติ
เกมยอดนิยมมักเป็นเกมที่แตกง่าย พร้อมระบบ Special Feature และ ระบบจ่ายคุ้มค่า เหมาะกับทั้ง คนเพิ่งเล่น และ ผู้เล่นที่มีประสบการณ์
ความน่าเชื่อถือ
PG Slot ใช้ระบบที่ได้มาตรฐาน มีการ เข้ารหัสข้อมูล และใช้ระบบสุ่มผล ระบบสุ่มมาตรฐาน เพื่อให้ผลลัพธ์ ตรวจสอบได้ แพลตฟอร์มที่ให้บริการ สล็อต PG ควรมี ทีมซัพพอร์ต 24 ชม.
สรุป
PG Slot เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน ระบบลื่นไหล และการทำธุรกรรมที่ รวดเร็ว ผู้เล่นสามารถเริ่มต้นได้ ง่าย ฝากถอนสะดวก และเลือกเกมได้ จำนวนมาก เหมาะสำหรับ ทุกระดับประสบการณ์ ในโลกของเกมสล็อตออนไลน์
перейти на сайт https://app.reim.ink/#/
Перейти на сайт https://reim.ink/
посетить веб-сайт https://goldera.win/
выберите ресурсы https://goldera.win
узнать больше https://goldera.win/
нажмите здесь https://goldera.win
посетить сайт https://goldera.win/
на этом сайте https://goldera.win
yogurt mayalama derecesi hakk?ndaki makaleyi gercekten begendim. Link burada: https://yappendik.com/articles/yogurt-mayalamada-maya-miktari-ipuclari/
Bu arada soyleyeyim, eger profesyonel mum yap?m? konusuyla ilgileniyorsan?z, suraya bak?n. Suradan okuyabilirsiniz: https://projesahibi.com/articles/evde-mum-yapimi-adim-adim-rehber/
перенаправляется сюда https://goldera.win/
Читать далее https://goldera.win/
можно проверить ЗДЕСЬ https://goldera.win/
ทดลองเล่นสล็อต pg ฟรี pg slot แพลตฟอร์มเกมสล็อตยอดนิยม เข้าเล่นไว ฝากถอนออโต้
คำค้นหา pg slot กำลังได้รับความนิยมอย่างต่อเนื่อง ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น ค่ายเกมที่มีชื่อเสียง ด้าน งานภาพคุณภาพสูง ความ ลื่นไหล และ ระบบจ่ายที่ดึงดูด เกมของ PG ออกแบบโดยทีมงานมืออาชีพ ที่รองรับการเล่นทั้งบน โทรศัพท์มือถือ และ เดสก์ท็อป
จุดเด่น ของ สล็อต PG
pg slot เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ เปิดเกมได้ทันที เล่นผ่าน ระบบออนไลน์ และรองรับ ทุกอุปกรณ์ เข้าเล่นผ่านเว็บได้เลย ผู้เล่นสามารถเข้าเล่นผ่าน หน้าเว็บ ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ สามมิติ ให้ความคมชัด พร้อมเอฟเฟกต์ สมจริง
คุณสมบัติหลักของเกม สล็อต PG ได้แก่
โบนัสและฟรีสปินหลายแบบ
ฟีเจอร์ตัวคูณรางวัล
เล่นฟรีก่อนเติมเงิน
รองรับภาษาไทยเต็มรูปแบบ
ระบบฝากถอนสะดวก ทำรายการไว
แพลตฟอร์ม สล็อต PG มักมี การฝาก-ถอน ฝากถอนตลอดเวลา ขั้นต่ำเริ่มต้นเพียง หลักหน่วย ขึ้นอยู่กับ เงื่อนไขของเว็บไซต์ การทำรายการใช้เวลา เพียงไม่กี่วินาที ผ่าน คิวอาร์โค้ด หรือระบบ แอปธนาคาร ทำให้ธุรกรรมเป็นไปอย่าง ลื่นไหล
ประเภทเกมยอดนิยม ใน PG Slot
เกม pg slot มีธีมหลากหลาย เช่น
ธีม เทพเจ้าและแฟนตาซี
ธีม ผจญภัย
ธีม โชคลาภ
ธีม ธรรมชาติ
ผู้เล่นนิยมเกมที่มีรอบพิเศษบ่อย พร้อมระบบ โบนัสรอบพิเศษ และ ระบบจ่ายคุ้มค่า เหมาะกับทั้ง คนเพิ่งเล่น และ ผู้เล่นมือโปร
ความน่าเชื่อถือ
สล็อต PG ใช้ระบบที่ได้มาตรฐาน มีการ เข้ารหัสข้อมูล และใช้ระบบสุ่มผล Random Number Generator เพื่อให้ผลลัพธ์ ตรวจสอบได้ แพลตฟอร์มที่ให้บริการ สล็อต PG ควรมี ความปลอดภัยสูง
สรุป
สล็อต PG เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน ระบบลื่นไหล และการทำธุรกรรมที่ ไว ผู้เล่นสามารถเริ่มต้นได้ ทันที ฝากถอนสะดวก และเลือกเกมได้ หลากหลายแนว เหมาะสำหรับ ทั้งมือใหม่และมือโปร ในโลกของเกมสล็อตออนไลน์
нажмите, чтобы подробнее https://goldera.win
этот контент https://goldera.win
Подробнее здесь https://goldera.win/
tuan88
проверить сайт https://goldera.win
Подробнее https://goldera.win
сюда https://goldera.win/
содержание https://goldera.win
узнать больше https://goldera.win
посетить веб-сайт https://goldera.win/
этот сайт https://goldera.win
узнать больше https://goldera.win
перенаправляется сюда https://goldera.win
продолжить https://goldera.win/
click over here dma hwid spoofer
читать Оптимизация налогов
you could check here emv x2 2021 download
browse around this site young pros
find out
Explore Beijing and Xi’an in 6 days
their website ssn method
click here to read western union carding
click for more info
Explore China’s top cities and natural wonders in 10 days
like it dark market telegram link
why not try here non vbv cc means
why not try here forum fullz
website here
Explore China’s wonders: Beijing, Xi’an, Chengdu, Yangtze, Shanghai. Pandas
click for source
Explore China’s highlights: Beijing, Xi’an, Chengdu, Shanghai, and pandas in a 10-day tour
important site
Explore Beijing and Xi’an in 6 days
visit here fullz info.pw
Get More Info free search ssn
why not try here full info
пояснения Уменьшение налога на прибыль
moved here ssn24 lookup
зайти на сайт Уменьшение налога на прибыль
you can try here
Explore China’s top cities and natural wonders in 10 days
Следующая страница Оптимизация налогов
Discover the thrill of real-money live casino action at Maxispin live casino, where you can enjoy live dealers, top software providers, and exclusive promotions.
Maxispin-au.com stands as a cutting-edge service transforming how people engage with online entertainment.
find here
Explore China’s wonders in 12 days: Beijing, Xi’an, Chongqing, Yangtze River, Shanghai
useful source fresh full info
useful reference
Explore China’s top cities in 10 days: Beijing, Xi’an, Hangzhou, Suzhou, Shanghai
pop over to this web-site bank drops
перейдите на этот сайт Убрать ндс
click for info Ssn search
перейдите на этот сайт Закрыть расходы
More hints free pros
you can try here non vbv cc checker online
check my site
Explore China’s rich history and vibrant cities in 10 days
this website free pros
check out the post right here
Explore China’s top cities in 10 days
this post fresh pros
browse around these guys carding 2025 reddit
Get More Info x2 smart card all in one 2025
check my site ssn bible 2026
over here ssn verification and lookup tool
click this site best osint
read more fullzinfo
другие Уменьшение налога на прибыль
подробнее Корректировка ндс
This Site ssn bulk
Continued self made acc
look at this now dark telegram
check my site
Explore China’s rich history and vibrant cities in 10 days
Click This Link young pros
Continue ssn method
useful source exchanges accounts
view
Explore Beijing, Xi’an, and Shanghai in an 8-day tour
this website fullz info ssn
ссылка на сайт Уменьшение налога Усн
next Ssn search
check that fullz bulk
useful source dark method 2025
their website best onion links reddit
читать Оптимизация налогов
additional hints onion links meaning
click to investigate fullz any state
content ssn bible 2025
my link eac firmware
see
Explore China’s top cities in 10 days
published here shophq credit card payment
click over here yodlee bank verification
have a peek at this website fresh fullz bulk
go to the website
Explore China’s top cities in 10 days
click for info
Explore China’s top cities in an 11-day tour: Beijing, Xi’an, Lhasa, Shanghai
можно проверить ЗДЕСЬ Уменьшение налога
нажмите Расходы ндс
узнать больше Здесь Разрыв ндс
web full info
click here for more info shophq vip
wikipedia reference TLO
кликните сюда читы на fortnit
нажмите здесь Скинченжер
informative post
indibet bonus code
review
10cric india
перенаправляется сюда купи продай можно купить аккаунт
site here buy digital visual pack templates
find more information buy max level account
сюда продать аккаунт pubg
можно проверить ЗДЕСЬ продать аккаунт в пабг мобайл за деньги
Visit Website buy max level account
здесь продать аккаунт пабг мобайл быстро
взгляните на сайте здесь торговая площадка
read the article buy digital style pack templates
на этом сайте yougame biz
перейти на сайт торговая площадка
кликните сюда чит кс приватный
he said buy PUBG account
каталог бесплатный кфг для чита
address
dafabet sports
click for source
rabona review
Главная продать аккаунт кс 2
my latest blog post
dafabet download
перейти на сайт как продать аккаунт на funpay
этот сайт можно ли продать аккаунт в пабг
their website
10cric bonus
visit our website
pinnacle bonus code
узнать больше продать аккаунт без
веб-сайт читы ксго приват
More Info sell digital component pack templates store
интернет продать аккаунт в пабге быстро
Подробнее здесь aimware dll cs
Full Report sell digital media pack templates store
check my source
cricket bet online
wikipedia reference buy Destiny 2 Silver
this article digital component pack templates marketplace
веб-сайт продать аккаунт леста мир
нажмите продать аккаунт таркова
Смотреть здесь продать аккаунт моментально
Всем привет! Занимаюсь автоблогом, Рё вечная проблема — писать статьи, которые действительно принесут трафик, Р° РЅРµ просто “для галочки”. Наткнулся РЅР° хороший разбор, РіРґРµ автор РЅР° примерах показывает, какие темы РІ автотематике реально собирают просмотры, Р° РЅР° какие даже РЅРµ стоит тратить время. Очень прикладной материал, сразу РІРёРґРЅРѕ, что человек знает нишу изнутри. Кто тоже мучается СЃ контент-планом, рекомендую: https://autovakuum.ru/kontent-dlya-avtosajta-kakie-temy-realno-dayut-trafik-a-kakie-net/ . Р’Р·СЏР» РЅР° заметку несколько идей для новых статей.
нажмите здесь за сколько можно продать аккаунт стим
my sources
nomini casino review
image source sell Tarkov account
browse around this website
1xbet bonus account withdrawal
my blog buy digital graphic pack templates
в этом разделе где продать аккаунт тг
Читать далее купить чит онлайн
Go Here sell FC account
можно проверить ЗДЕСЬ продать аккаунт фейсит
узнать больше Здесь продать аккаунт в танках леста
ссылка на сайт memesense
her comment is here
10cric bonus
visit homepage online digital content pack templates
see here
betobet casino
click now https://Zd.gl
читать сколько стоит продать аккаунт
click for source buy Genshin Impact account
why not try this out
1xbet bonus promo code
подробнее продать аккаунт букмекерской конторы
зайти на сайт плей рок продать аккаунт
Web Site https://Zd.gl/
интернет бесплатные читы кс
blog link https://Zd.gl
перейдите на этот сайт продать аккаунт фри фаер
подробнее здесь может ли самозанятый продавать цифровые товары
Hello everyone!
Decode storm mysterious patterns hiding interesting and valuable meteorological news and predict weather with accuracy see on the website for forecast models
Full information on the link – https://aclib.spb.ru/2025/12/14/kompostery-sovremennye-resheniya-dlya-pererabotki-organicheskih-othodov-i-uluchsheniya-ekologii/
All the best and development in business!
такой где можно продать аккаунт стим
look at here
promo codes for betting
смотреть здесь продать аккаунт вк
try here https://Zd.gl
why not try here
10cric promo code
article source
betobet review
узнать аккаунт cs2 prime
website here sell Call of Duty account
he said
rabona
find out here digital media pack templates marketplace
find here buy GTA 5 account with money
нажмите, чтобы подробнее cs2 prime
подробнее продать аккаунт стендов
Следующая страница кряк аимвар
click over here sell digital art pack templates
official source buy digital art pack templates
hop over to these guys sell CSGO account
нажмите скрипты
go now https://Zd.gl
the original source https://Zd.gl
другие бесплатные читы кс
official statement https://Zd.gl/
check over here https://Zd.gl
проверить сайт xone
узнать больше Здесь Аккаунты
see post
cricket bet live
more
10cric promo code
pop over to these guys account selling platform
посмотреть в этом разделе читы для кс 2
click here for more info https://Zd.gl/
Learn More https://Zd.gl/
нажмите здесь продать аккаунт кс го
читать читы
Подробнее здесь аккаунты steam
зайти на сайт россия продать аккаунт
learn this here now https://Zd.gl
click this link here now https://Zd.gl
my sources
how to bet on 1xbet cricket
найти это продать аккаунт кс го
the original source
1xbet promo code india
интернет Буст
these details https://Zd.gl
useful reference
cricket history
read here https://Zd.gl/
check out here
10cric bonus rules
find out https://Zd.gl
view website https://Zd.gl/
have a peek at this web-site
rabona bonus
informative post https://Zd.gl
Good afternoon!
Unlock sport mysterious records with interesting and valuable athletic facts today and chase greatness see on the website for record books
Full information on the link – https://bagira-furs.ru/praktichnaya-innovaciya-dlya-letnego-otdyha-plyazhnaya-prischepka-dlya-polotenca-ot-ooo-vpm.html
All the best and development in business!
visit the site
dafabet bonus code india
посетить сайт Игровая валюта
he has a good point
how to bet on cricket
have a peek at this web-site https://Zd.gl
page https://Zd.gl
Следующая страница продать аккаунт ворлд оф
Get More Info
1xbet promo code
my site https://Zd.gl/
additional reading https://Zd.gl/
article source digital style pack templates marketplace
discover here
promo codes for bonus
click to read more
betobet review
кликните сюда можно ли продать аккаунт в танках
check my source buy Warframe platinum
Recommended Site
dafabet casino
пояснения aimware dll cs
Подробнее здесь yougamebiz
нажмите здесь cs2
read review https://Zd.gl/
перейти на сайт чит кс приватный
check my reference sell WoW account
Your Domain Name
1xbet india
click for more https://Zd.gl/
next https://Zd.gl
here are the findings online digital art pack templates
my link https://Zd.gl
веб-сайт продать аккаунт mobile
this content online digital art pack templates
her comment is here digital layout pack templates marketplace
найти это где продать аккаунт тг
go to my site https://Zd.gl/
go to my site https://Zd.gl
other https://Zd.gl/
find out sell Call of Duty account
look here
10cric bonus code today
Full Report https://Zd.gl
see here now
all about cricket
Узнать больше lua скрипт
see post sell account with guarantee
сайт не вздумай продавать аккаунт в тг
home https://Zd.gl/
нажмите здесь продать аккаунт кс го
здесь где продают аккаунт телеграмм
интернет почему продают аккаунты
go to the website https://Zd.gl
look at this web-site https://Zd.gl
basics https://Zd.gl/
check my site https://Zd.gl
этот сайт fermacc
смотреть здесь ferma.cc
Знакомая ситуация, многие начинают паниковать и скупать ссылки, что только усугубляет положение. Хорошая статья попалась именно про то, как действовать без паники после апдейтов. Автор разбирает, на какие элементы сайта (техничка, контент, поведенческие) нужно обращать внимание в первую очередь, чтобы вернуть позиции. Особенно актуально для автосайтов, но общие принципы подойдут многим. Кто еще не видел, вот ссылка: https://specavto43.ru/pochemu-avtosajty-teryayut-poziczii-posle-apdejtov-chto-chinit-v-pervuyu-ochered-bez-paniki/ . Спокойный и структурированный разбор.
important source betswap test
check out the post right here betswap gg
продолжить fermacc
ltc try – chiliz coin nasıl alınır, chz coin try
chz coin try – xlm try, stellar tl
пояснения ferma обменник
Good morning!
Share cultural mysterious traditions with interesting and valuable historical roots and preserve heritage for future generations see on the website for heritage archives
Full information on the link – http://litcult.ru/news2.news3/14805
All the best and development in business!
usdttry – stellar tl, chiliz coin anlaşmaları
узнать больше ferma обменник
chz try – kripto para chz, clz coin
moved here betswap promo code
stellar tl – chz try, chz coin try
chiliz anlık – litecoin al, kripto para chz
посетить сайт ферма.сс
look here betswap test
my sources betswap erfahrungen
в этом разделе ferma обменник
ethereum satın al – flx coin, chiliz coin anlaşmaları
посмотреть в этом разделе ferma.cc
go to my blog betswap promo code
chiliz coin anlaşmaları – xlm try, flx coin
ссылка на сайт ферма.сс
проверить сайт ферма обменник
look at these guys betswap gg
Главная fermacc
ethereum satın al – cro usdt, felixo
сюда ferma cc
chz coin try – flx coin, ethereum satın al
сайт ferma обменник
basics betswap promo code
другие ферма обменник
посмотреть на этом сайте ferma обменник
look at this web-site betswap casino
a knockout post betswap no deposit bonus
ethereum satın al – felixo, kripto para chz
official website betswap test
webpage betswap casino
this contact form betswap app
official source betswap casino
litecoin al – chiliz coin nasıl alınır, chz coin try
посмотреть на этом сайте ferma обменник
подробнее ferma обменник
нажмите ферма обменник
straight from the source betswaps
chiliz anlık – ltc try, chz coin try
click this betswap gg
узнать больше ferma.cc
look these up betswap no deposit bonus
выберите ресурсы fermacc
посмотреть в этом разделе ferma обменник
посмотреть на этом сайте ferma cc
Going Here betswap test
другие ferma.cc
chz coin try – chiliz coin nasıl alınır, flx coin
в этом разделе ферма сс
узнать больше Здесь ferma cc
Can I propose to a girl? proposal photographer in Barcelona
нажмите, чтобы подробнее ферма сс
Learn More betswap gg
click here to investigate betswap promo code
Get More Info betswap erfahrungen
resource betswap gg
litecoin al – kripto para chz, clz coin
кликните сюда ферма сс
this betswap
подробнее здесь ферма сс
chz try – chiliz coin anlaşmaları, felixo
i loved this betswap no deposit bonus
Главная ferma.cc
подробнее ферма сс
stellar tl – stellar tl, felink
chiliz coin anlaşmaları – stellar tl, kripto para chz
Get More Info betswap test
have a peek here betswap promo code
навес для крыльца навес для автомобиля
explanation betswap test
нажмите здесь ферма обменник
find out this here betswaps
look here betswap promo code
flx coin – ltc try, kripto para chz
go betswap erfahrungen
usdttry – ethereum satın al, chz try
каталог ферма обменник
узнать больше Здесь fermacc
пояснения ферма сс
click this over here now betswap review
see post betswap test
litecoin al – xlm try, flx coin
chiliz anlık – cro usdt, clz coin
chiliz anlık – flx coin, xlm try
интернет fermacc
felixo – clz coin, clz coin
Продолжение ferma.cc
Related Site betswap erfahrungen
special info betswap gg
chz coin try – felink, felink
chz coin try – litecoin al, chz coin try
have a peek at this web-site betswap promo code
clz coin – felink, ltc try
over here betswap casino
kripto para chz – chz try, felink
chz try – felixo, clz coin
chz try – felixo, flx coin
weblink betswap review
chiliz coin anlaşmaları – xlm try, chz coin try
useful source betswap test
xlm try – usdttry, chiliz anlık
Web Site betswap app
about his betswap casino
chiliz coin anlaşmaları – felixo, ltc try
my review here https://prm4u.com/
important source https://prm4u.com/buy-facebook-comments
company website https://prm4u.com/buy-telegram-views
this https://prm4u.com/buy-instagram-likes
Читать далее https://slon2-at.cc/
ทดลองเล่นสล็อต pg เว็บ ตรง”
PG Slot แพลตฟอร์มเกมสล็อตยอดนิยม ใช้งานง่าย ฝากถอนรวดเร็ว
คำค้นหา PG Slot ถูกค้นหามากขึ้นเรื่อยๆ ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น แบรนด์เกมที่โดดเด่น ด้าน กราฟิก ความ เสถียร และ ระบบจ่ายที่ดึงดูด เกมของ PG ออกแบบโดยทีมงานมืออาชีพ ที่รองรับการเล่นทั้งบน สมาร์ทโฟน และ เดสก์ท็อป
ข้อดี ของ สล็อต PG
PG Slot เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ เปิดเกมได้ทันที เล่นผ่าน ระบบอัตโนมัติ และรองรับ ทั้ง iOS และ Android เข้าเล่นผ่านเว็บได้เลย ผู้เล่นสามารถเข้าเล่นผ่าน เว็บเบราว์เซอร์ ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ 3D ให้ความคมชัด พร้อมเอฟเฟกต์ สมจริง
คุณสมบัติหลักของเกม สล็อต PG ได้แก่
โบนัสและฟรีสปินหลายแบบ
ระบบตัวคูณ
เดโม่ฟรี
รองรับภาษาไทยเต็มรูปแบบ
ระบบฝากถอนสะดวก ทันใจ
แพลตฟอร์ม pg slot โดยทั่วไปให้บริการ การฝาก-ถอน ฝากถอนตลอดเวลา ขั้นต่ำเริ่มต้นเพียง หลักหน่วย ขึ้นอยู่กับ ระบบของผู้ให้บริการ การทำรายการใช้เวลา เพียงไม่กี่วินาที ผ่าน คิวอาร์โค้ด หรือระบบ Mobile Banking ทำให้ธุรกรรมเป็นไปอย่าง ต่อเนื่อง
แนวเกมที่คนเล่นเยอะ ใน pg slot
เกม PG Slot มีธีมหลากหลาย เช่น
ธีม แฟนตาซี
ธีม ผจญภัย
ธีม เอเชียและโชคลาภ
ธีม Animal
ผู้เล่นนิยมเกมที่มีรอบพิเศษบ่อย พร้อมระบบ ฟีเจอร์พิเศษ และ ระบบจ่ายคุ้มค่า เหมาะกับทั้ง คนเพิ่งเล่น และ สายสล็อตจริงจัง
มาตรฐานระบบ
สล็อต PG ใช้ระบบที่ได้มาตรฐาน มีการ รักษาความปลอดภัย และใช้ระบบสุ่มผล RNG เพื่อให้ผลลัพธ์ ตรวจสอบได้ แพลตฟอร์มที่ให้บริการ pg slot ควรมี ความปลอดภัยสูง
สรุป
PG Slot เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน ระบบลื่นไหล และการทำธุรกรรมที่ ทันใจ ผู้เล่นสามารถเริ่มต้นได้ ง่าย ฝากถอนสะดวก และเลือกเกมได้ ครบทุกหมวด เหมาะสำหรับ ผู้เล่นทุกสไตล์ ในโลกของเกมสล็อตออนไลน์
здесь https://slon2-at.cc
Your thoughtful response really adds to the value of this post.CandyBabyjili
подробнее здесь blacksprut com
выберите ресурсы kraken сайт
Читать далее кракен даркнет маркет
Источник кра сайт
Читать далее https://slon4-at.at/
найти это https://slon2-at.cc/
интернет slon1 at
ссылка на сайт kraken зайти
Источник https://slon4-at.at
веб-сайте kraken войти
найти это https://slon4-at.at
содержание https://slon4-at.at/
веб-сайт https://slon4-at.at
ссылка на сайт https://slon4-at.at/
пояснения https://slon4-at.at/
подробнее здесь https://slon4-at.at/
ссылка на сайт кракен даркнет
Источник kraken shop
проверить сайт https://slon2-at.com
узнать больше Здесь https://slon4-at.at/
смотреть здесь https://slon4-at.at/
подробнее kraken сайт
нажмите здесь https://slon4-at.at
Подробнее slon3 cc
Подробнее kraken вход
ссылка на сайт https://slon4-at.at
подробнее kraken сайт
нажмите, чтобы подробнее кракен купить
ссылка на сайт 2fa код blacksprut
перенаправляется сюда кракен мп
пояснения slon3 cc
Следующая страница blacksprut зеркало
узнать больше Здесь https://slon4-at.at
посетить веб-сайт кракен даркнет
Источник kraken зайти
Узнать больше кракен онион
каталог kraken сайт
узнать больше Здесь kraken darknet market
подробнее https://slon4-at.at/
другие https://slon4-at.at
пояснения https://slon4-at.at
посетить веб-сайт https://slon4-at.at/
подробнее кракен официальный сайт
Читать далее kraken сайт
выберите ресурсы https://slon4-at.at
Смотреть здесь kraken официальные ссылки
на этом сайте https://slon4-at.at/
перейти на сайт slon3.cc
перейдите на этот сайт kraken войти
нажмите, чтобы подробнее kra at
узнать больше blacksprut сайт
смотреть здесь https://slon2-at.com/
перенаправляется сюда кракен даркнет маркет
Источник bs2best
смотреть здесь 2fa blacksprut
зайти на сайт slon1.at
нажмите здесь slon5 at
в этом разделе кракен онион
узнать больше https://slon4-at.at
нажмите здесь кракен купить
Подробнее slon1.at
можно проверить ЗДЕСЬ https://slon4-at.at/
посетить веб-сайт https://slon4-at.at
этот сайт кракен вход
узнать больше kraken сайт зеркала
перейдите на этот сайт bs2best at
Читать далее 2fa blacksprut
нажмите, чтобы подробнее https://slon4-at.at/
этот сайт блэкспрут сайт
продолжить slon1 cc
узнать больше https://slon4-at.at/
веб-сайте кракен ссылка
в этом разделе kraken зайти
интернет kraken ссылка зеркало
нажмите slon4.cc
посетить сайт блэкспрут сайт
здесь кракен купить
смотреть здесь kraken shop
опубликовано здесь кракен вход
выберите ресурсы slon3.cc
здесь блэкспрут зеркало
узнать больше blacksprut сайт
здесь https://slon4-at.at/
пояснения slon3 cc
Следующая страница https://slon4-at.at
узнать больше Здесь кракен онион
Узнать больше kraken войти
перенаправляется сюда slon3.at
нажмите, чтобы подробнее https://slon4-at.at
ссылка на сайт slon at
опубликовано здесь https://slon4-at.at
узнать больше 2fa blacksprut
посмотреть в этом разделе https://slon2-at.com/
интернет https://slon4-at.at
посетить веб-сайт kraken market
опубликовано здесь https://slon4-at.at/
такой блэкспрут зеркало
каталог https://slon4-at.at
Смотреть здесь кракен мп
узнать https://slon4-at.at
продолжить blacksprut сайт
посетить сайт https://slon4-at.at/
перейти на сайт кракен сайт
посмотреть на этом сайте https://slon4-at.at/
подробнее slon at
подробнее здесь кракен ссылка kraken
узнать больше kraken зеркало
посмотреть на этом сайте кракен зеркало
на этом сайте топ blacksprut
узнать кракен клир
Следующая страница кра сайт
на этом сайте блэкспрут
можно проверить ЗДЕСЬ https://slon2-at.com/
содержание kraken актуальные ссылки
сюда https://slon4-at.at
ссылка на сайт blacksprut com
перенаправляется сюда https://slon4-at.at
этот сайт https://slon4-at.at
веб-сайте slon5.cc
найти это https://slon2-at.com
такой актуальные зеркала kraken
посетить сайт kraken
содержание блэкспрут площадка
кликните сюда kraken сайт зеркала
перенаправляется сюда кракен актуальная ссылка
Подробнее здесь https://slon4-at.at
нажмите kraken рабочая ссылка onion
этот сайт кракен даркнет
Узнать больше slon4.cc
в этом разделе https://slon4-at.at
Подробнее kraken shop
I appreciate your creativity and the effort you put into every post. Keep up the great work!
здесь блэкспрут ссылка
ссылка на сайт блэкспрут зеркало
перенаправляется сюда https://vodkabet-play.vodkabet-zerkalo.vodka/
посетить сайт blacksprut com
Перейти на сайт https://vodkabet-play.vodkabet-zerkalo.vodka/
узнать больше https://vodkabet-play.vodkabet-zerkalo.vodka
узнать кракен darknet
Смотреть здесь bs2best at ссылка
Источник https://vodkabet-play.vodkabet-zerkalo.vodka/
здесь https://vodkabet-play.vodkabet-zerkalo.vodka/
Узнать больше https://vodkabet-play.vodkabet-zerkalo.vodka/
перейти на сайт https://vodkabet-play.vodkabet-zerkalo.vodka
нажмите здесь https://vodkabet-play.vodkabet-zerkalo.vodka/
страница https://vodkabet-play.vodkabet-zerkalo.vodka/
каталог https://vodkabet-play.vodkabet-zerkalo.vodka/
взгляните на сайте здесь kraken актуальные ссылки
Смотреть здесь https://vodkabet-play.vodkabet-zerkalo.vodka/
содержание https://vodkabet-play.vodkabet-zerkalo.vodka
подробнее https://vodkabet-play.vodkabet-zerkalo.vodka/
страница kraken рабочая ссылка onion
сайт https://vodkabet-play.vodkabet-zerkalo.vodka
Смотреть здесь https://vodkabet-play.vodkabet-zerkalo.vodka
можно проверить ЗДЕСЬ https://vodkabet-play.vodkabet-zerkalo.vodka/
узнать больше https://vodkabet-play.vodkabet-zerkalo.vodka
продолжить blacksprut ссылка
выберите ресурсы https://vodkabet-play.vodkabet-zerkalo.vodka/
каталог https://vodkabet-play.vodkabet-zerkalo.vodka/
опубликовано здесь блэкспрут сайт
Подробнее https://vodkabet-play.vodkabet-zerkalo.vodka
Смотреть здесь https://vodkabet-play.vodkabet-zerkalo.vodka
узнать больше https://vodkabet-play.vodkabet-zerkalo.vodka/
интернет https://vodkabet-play.vodkabet-zerkalo.vodka/
кликните сюда https://vodkabet-play.vodkabet-zerkalo.vodka/
посетить веб-сайт kraken darknet
перейти на сайт https://vodkabet-play.vodkabet-zerkalo.vodka/
узнать больше Здесь блэкспрут сайт
Продолжение https://vodkabet-play.vodkabet-zerkalo.vodka
ссылка на сайт https://vodkabet-play.vodkabet-zerkalo.vodka
перейдите на этот сайт kraken актуальные ссылки
кликните сюда https://vodkabet-play.vodkabet-zerkalo.vodka
Подробнее здесь https://vodkabet-play.vodkabet-zerkalo.vodka/
подробнее https://vodkabet-play.vodkabet-zerkalo.vodka/
сайт https://vodkabet-play.vodkabet-zerkalo.vodka
узнать больше Здесь сайт kraken darknet
взгляните на сайте здесь https://vodkabet-play.vodkabet-zerkalo.vodka/
посетить веб-сайт https://vodkabet-play.vodkabet-zerkalo.vodka/
опубликовано здесь https://vodkabet-play.vodkabet-zerkalo.vodka/
Смотреть здесь https://vodkabet-play.vodkabet-zerkalo.vodka/
посетить веб-сайт https://vodkabet-play.vodkabet-zerkalo.vodka
посетить сайт https://vodkabet-play.vodkabet-zerkalo.vodka/
посмотреть в этом разделе https://vodkabet-play.vodkabet-zerkalo.vodka/
перенаправляется сюда https://vodkabet-play.vodkabet-zerkalo.vodka/
Смотреть здесь https://vodkabet-play.vodkabet-zerkalo.vodka/
пояснения https://vodkabet-play.vodkabet-zerkalo.vodka/
веб-сайт https://vodkabet-play.vodkabet-zerkalo.vodka/
читать блэкспрут сайт
взгляните на сайте здесь https://vodkabet-play.vodkabet-zerkalo.vodka
нажмите здесь https://vodkabet-play.vodkabet-zerkalo.vodka
подробнее здесь https://vodkabet-play.vodkabet-zerkalo.vodka
интернет https://vodkabet-play.vodkabet-zerkalo.vodka/
сайт https://vodkabet-play.vodkabet-zerkalo.vodka/
сюда https://vodkabet-play.vodkabet-zerkalo.vodka/
Читать далее https://vodkabet-play.vodkabet-zerkalo.vodka
нажмите, чтобы подробнее https://vodkabet-play.vodkabet-zerkalo.vodka/
каталог https://vodkabet-play.vodkabet-zerkalo.vodka
кликните сюда kraken сайт
подробнее kraken onion
смотреть здесь https://vodkabet-play.vodkabet-zerkalo.vodka/
другие https://vodkabet-play.vodkabet-zerkalo.vodka/
этот сайт https://vodkabet-play.vodkabet-zerkalo.vodka/
Подробнее https://vodkabet-play.vodkabet-zerkalo.vodka
нажмите, чтобы подробнее кракен darknet
Читать далее https://vodkabet-play.vodkabet-zerkalo.vodka/
зайти на сайт https://vodkabet-play.vodkabet-zerkalo.vodka
кликните сюда кракен даркнет маркет
подробнее здесь блэкспрут
на этом сайте https://vodkabet-play.vodkabet-zerkalo.vodka/
проверить сайт https://vodkabet-play.vodkabet-zerkalo.vodka/
в этом разделе bs2best
на этом сайте https://vodkabet-play.vodkabet-zerkalo.vodka
Очередная волна разговоров о том, что SEO больше не работает. Как по мне, те, кто так говорят, либо не сталкивались с грамотным продвижением, либо ожидали быстрых результатов. Нашел статью, где хорошо объясняется, почему SEO остается основой устойчивого онлайн-бизнеса. Основные тезисы: органический трафик никуда не уходит, доверие к топовым сайтам выше, а стоимость привлечения клиента со временем только снижается. Почитайте, тема раскрыта аргументированно: https://iskra-net.ru/preimushhestva-prodvizheniya-sajtov-pochemu-seo-eto-osnova-ustojchivogo-onlajn-biznesa/ . Особенно полезно будет тем, кто ищет долгосрочные каналы, а не разовые всплески.
здесь блэкспрут
в этом разделе https://vodkabet-play.vodkabet-zerkalo.vodka
в этом разделе blacksprut зеркало
Источник https://vodkabet-play.vodkabet-zerkalo.vodka/
перейдите на этот сайт kra ссылка
посетить веб-сайт https://vodkabet-play.vodkabet-zerkalo.vodka
такой блэкспрут не работает
опубликовано здесь https://vodkabet-play.vodkabet-zerkalo.vodka
подробнее bs2best at что за сайт
узнать больше Здесь https://vodkabet-play.vodkabet-zerkalo.vodka/
нажмите, чтобы подробнее https://vodkabet-play.vodkabet-zerkalo.vodka/
зайти на сайт https://vodkabet-play.vodkabet-zerkalo.vodka/
Перейти на сайт https://vodkabet-play.vodkabet-zerkalo.vodka
ссылка на сайт bs2best at
Узнать больше bs2best
ссылка на сайт https://vodkabet-play.vodkabet-zerkalo.vodka
Подробнее https://vodkabet-play.vodkabet-zerkalo.vodka
Подробнее здесь kraken официальные ссылки
посмотреть в этом разделе blacksprut
Перейти на сайт https://vodkabet-play.vodkabet-zerkalo.vodka
Следующая страница https://vodkabet-play.vodkabet-zerkalo.vodka
перенаправляется сюда https://vodkabet-play.vodkabet-zerkalo.vodka
узнать https://vodkabet-play.vodkabet-zerkalo.vodka
Перейти на сайт https://vodkabet-play.vodkabet-zerkalo.vodka
зайти на сайт kraken darknet
в этом разделе https://vodkabet-play.vodkabet-zerkalo.vodka/
Подробнее здесь https://vodkabet-play.vodkabet-zerkalo.vodka
содержание kraken ссылка на сайт
страница https://vodkabet-play.vodkabet-zerkalo.vodka/
посетить сайт https://vodkabet-play.vodkabet-zerkalo.vodka
можно проверить ЗДЕСЬ blacksprut
читать блэкспрут сайт
содержание kraken официальные ссылки
опубликовано здесь https://vodkabet-play.vodkabet-zerkalo.vodka/
читать ферма.сс
нажмите, чтобы подробнее ферма сс
подробнее здесь ферма обменник
на этом сайте ферма обменник
Подробнее здесь кракен ссылка onion
нажмите ferma обменник
Следующая страница ферма.сс
сайт ферма сс
интернет ferma cc
кликните сюда ferma обменник
веб-сайт ferma cc
Смотреть здесь fermacc
нажмите ферма обменник
перейти на сайт fermacc
нажмите, чтобы подробнее ferma cc
этот сайт ferma.cc
Продолжение ferma cc
ссылка на сайт ферма.сс
Подробнее ферма обменник
проверить сайт ferma обменник
посетить сайт ferma обменник
нажмите здесь ферма обменник
Подробнее ферма обменник
подробнее ferma cc
найти это ферма.сс
узнать больше ферма сс
ทดลองเล่นสล็อต pg ฟรี pg slot เกมสล็อตออนไลน์ที่คนค้นหาเยอะ เล่นง่าย ฝากถอนเร็ว
คำค้นหา PG Slot มาแรงในช่วงนี้ ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น แบรนด์เกมที่โดดเด่น ด้าน กราฟิก ความ เสถียร และ โอกาสรับกำไรที่ดี เกมของ PG พัฒนาโดยผู้ให้บริการชั้นนำ ที่รองรับการเล่นทั้งบน โทรศัพท์มือถือ และ พีซี
ความโดดเด่น ของ สล็อต PG
pg slot เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ เปิดเกมได้ทันที เล่นผ่าน ระบบอัตโนมัติ และรองรับ ทั้ง iOS และ Android เข้าเล่นผ่านเว็บได้เลย ผู้เล่นสามารถเข้าเล่นผ่าน Browser ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ เอฟเฟกต์ 3 มิติ ให้ความคมชัด พร้อมเอฟเฟกต์ สมจริง
คุณสมบัติหลักของเกม สล็อต PG ได้แก่
โบนัสและฟรีสปินหลายแบบ
ระบบตัวคูณ
โหมดทดลองเล่นฟรี
มีเมนูภาษาไทย
ระบบการเงินรวดเร็ว ไม่ต้องรอนาน
แพลตฟอร์ม pg slot มักมี การฝาก-ถอน อัตโนมัติ 24 ชั่วโมง ขั้นต่ำเริ่มต้นเพียง 10 บาท ขึ้นอยู่กับ เงื่อนไขของเว็บไซต์ การทำรายการใช้เวลา ไม่กี่วินาที ผ่าน QR Code หรือระบบ Mobile Banking ทำให้ธุรกรรมเป็นไปอย่าง ลื่นไหล
แนวเกมที่คนเล่นเยอะ ใน pg slot
เกม สล็อต PG มีธีมหลากหลาย เช่น
ธีม เทพเจ้าและแฟนตาซี
ธีม ลุยด่าน
ธีม ความมั่งคั่ง
ธีม Animal
หลายคนชอบเกมที่โบนัสเข้าไว พร้อมระบบ Special Feature และ โอกาสทำกำไรสูง เหมาะกับทั้ง คนเพิ่งเล่น และ สายสล็อตจริงจัง
มาตรฐานระบบ
สล็อต PG พัฒนาในระบบสากล มีการ รักษาความปลอดภัย และใช้ระบบสุ่มผล ระบบสุ่มมาตรฐาน เพื่อให้ผลลัพธ์ ตรวจสอบได้ แพลตฟอร์มที่ให้บริการ สล็อต PG ควรมี ทีมซัพพอร์ต 24 ชม.
โดยภาพรวม
pg slot เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน กราฟิกคุณภาพ และการทำธุรกรรมที่ รวดเร็ว ผู้เล่นสามารถเริ่มต้นได้ ง่าย ฝากถอนสะดวก และเลือกเกมได้ จำนวนมาก เหมาะสำหรับ ทุกระดับประสบการณ์ ในโลกของเกมสล็อตออนไลน์
Всем привет! Занимаюсь автоблогом, Рё вечная проблема — писать статьи, которые действительно принесут трафик, Р° РЅРµ просто “для галочки”. Наткнулся РЅР° хороший разбор, РіРґРµ автор РЅР° примерах показывает, какие темы РІ автотематике реально собирают просмотры, Р° РЅР° какие даже РЅРµ стоит тратить время. Очень прикладной материал, сразу РІРёРґРЅРѕ, что человек знает нишу изнутри. Кто тоже мучается СЃ контент-планом, рекомендую: https://autovakuum.ru/kontent-dlya-avtosajta-kakie-temy-realno-dayut-trafik-a-kakie-net/ . Р’Р·СЏР» РЅР° заметку несколько идей для новых статей.
Перейти на сайт ферма обменник
интернет ferma обменник
посмотреть в этом разделе ferma cc
Good afternoon!
Discover gene mysterious sequences offering interesting and valuable DNA insights and read the book of life see on the website for genome browsers
Full information on the link – https://gosuslugi-lichnyi-kabinet.ru/proizvodstvo-i-izgotovlenie-plastikovyh-vtulok-na-zakaz-metodom-litya-pod-davleniem-v-sankt-peterburge/
All the best and development in business!
посетить веб-сайт ferma обменник
смотреть здесь ферма.сс
Узнать больше ферма обменник
здесь ферма обменник
перенаправляется сюда ferma.cc
опубликовано здесь blacksprut сайт
опубликовано здесь кракен ссылка
посмотреть в этом разделе ferma cc
посмотреть на этом сайте ferma cc
подробнее kraken ссылка зеркало
сайт ферма сс
другие ферма обменник
подробнее здесь ferma обменник
Перейти на сайт ферма.сс
читать ferma.cc
подробнее ферма обменник
нажмите здесь ферма обменник
Смотреть здесь blacksprut
этот сайт ferma.cc
узнать больше Здесь ферма сс
на этом сайте ферма сс
читать ферма обменник
Следующая страница ferma cc
узнать больше блэкспрут
узнать больше ferma.cc
здесь ferma обменник
опубликовано здесь fermacc
пояснения ferma обменник
здесь ферма обменник
узнать больше ферма сс
посмотреть на этом сайте ferma.cc
содержание ферма.сс
ссылка на сайт ferma cc
нажмите, чтобы подробнее ферма обменник
Узнать больше кракен онион зеркало
страница ferma.cc
Перейти на сайт ferma.cc
содержание ферма сс
такой ferma обменник
этот контент ферма.сс
нажмите, чтобы подробнее ferma cc
узнать больше ферма сс
здесь ферма обменник
взгляните на сайте здесь ferma cc
Узнать больше ferma cc
другие ферма.сс
нажмите здесь ferma.cc
Следующая страница fermacc
здесь ферма.сс
читать ферма.сс
pg slot สล็อตยอดฮิต เล่นง่าย ฝากถอนเร็ว
คำค้นหา pg slot กำลังได้รับความนิยมอย่างต่อเนื่อง ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น ค่ายเกมที่มีชื่อเสียง ด้าน ภาพและเอฟเฟกต์ ความ นิ่งไม่สะดุด และ อัตราการจ่ายรางวัลที่น่าสนใจ เกมของ PG พัฒนาโดยผู้ให้บริการชั้นนำ ที่รองรับการเล่นทั้งบน โทรศัพท์มือถือ และ เดสก์ท็อป
ความโดดเด่น ของ pg slot
pg slot เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ เข้าเกมไว เล่นผ่าน ระบบออนไลน์ และรองรับ ทุกแพลตฟอร์ม ไม่ต้องติดตั้งเพิ่มเติม ผู้เล่นสามารถเข้าเล่นผ่าน เว็บเบราว์เซอร์ ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ สามมิติ ให้ความคมชัด พร้อมเอฟเฟกต์ สวยงาม
คุณสมบัติหลักของเกม PG Slot ได้แก่
มีรอบโบนัสให้ลุ้นบ่อย
ฟีเจอร์ตัวคูณรางวัล
เดโม่ฟรี
ใช้งานภาษาไทยง่าย
ระบบฝากถอนสะดวก ทันใจ
แพลตฟอร์ม สล็อต PG มักมี การฝาก-ถอน ออโต้ตลอด 24 ชม. ขั้นต่ำเริ่มต้นเพียง หลักหน่วย ขึ้นอยู่กับ กติกาแต่ละแพลตฟอร์ม การทำรายการใช้เวลา รวดเร็วมาก ผ่าน สแกน QR หรือระบบ Mobile Banking ทำให้ธุรกรรมเป็นไปอย่าง ต่อเนื่อง
แนวเกมที่คนเล่นเยอะ ใน pg slot
เกม PG Slot มีธีมหลากหลาย เช่น
ธีม เทพเจ้าและแฟนตาซี
ธีม ลุยด่าน
ธีม เอเชียและโชคลาภ
ธีม ธรรมชาติ
ผู้เล่นนิยมเกมที่มีรอบพิเศษบ่อย พร้อมระบบ Special Feature และ โอกาสทำกำไรสูง เหมาะกับทั้ง มือใหม่ และ ผู้เล่นที่มีประสบการณ์
ความน่าเชื่อถือ
สล็อต PG พัฒนาในระบบสากล มีการ เข้ารหัสข้อมูล และใช้ระบบสุ่มผล Random Number Generator เพื่อให้ผลลัพธ์ โปร่งใส แพลตฟอร์มที่ให้บริการ PG Slot ควรมี ระบบดูแลข้อมูล
บทสรุปท้ายบท
pg slot เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน ระบบลื่นไหล และการทำธุรกรรมที่ ทันใจ ผู้เล่นสามารถเริ่มต้นได้ ทันที ฝากถอนสะดวก และเลือกเกมได้ ครบทุกหมวด เหมาะสำหรับ ทุกระดับประสบการณ์ ในโลกของเกมสล็อตออนไลน์
https://medium.com/@ratypw/ทดลองเล่นสล็อต-pg-70cdb1132344
нажмите, чтобы подробнее ферма сс
выберите ресурсы ferma обменник
The terpene – energizing terpenes delivers a clear, botanical savour with remarkable abstruseness and character. Each note blends logically, creating a cultivated also nett rather than a distinct outstanding scent. The product arrived plainly packaged, with thorough descriptions included. It feels consistent and professionally made, with attribute understandable from first indentation to end use.
Продолжение ferma обменник
狙击蝴蝶2026 高清悬疑刑侦陆剧 海外华人必备在线观看 全球加速无缓冲播放
ทดลองเล่นสล็อต pg ฟรี pg slot เกมสล็อตออนไลน์ที่คนค้นหาเยอะ เล่นง่าย ฝากถอนเร็ว
คำค้นหา pg slot มาแรงในช่วงนี้ ในกลุ่มผู้เล่นเกมสล็อตออนไลน์ เพราะเป็น แบรนด์เกมที่โดดเด่น ด้าน งานภาพคุณภาพสูง ความ เสถียร และ โอกาสรับกำไรที่ดี เกมของ PG พัฒนาโดยผู้ให้บริการชั้นนำ ที่รองรับการเล่นทั้งบน สมาร์ทโฟน และ พีซี
จุดเด่น ของ PG Slot
PG Slot เป็นเกมสล็อตออนไลน์ที่ออกแบบมาให้ เปิดเกมได้ทันที เล่นผ่าน ระบบอัตโนมัติ และรองรับ ทุกอุปกรณ์ ไม่ต้องดาวน์โหลดแอป ผู้เล่นสามารถเข้าเล่นผ่าน เว็บเบราว์เซอร์ ได้ทันที ภาพและเสียงถูกพัฒนาในรูปแบบ 3D ให้ความคมชัด พร้อมเอฟเฟกต์ สวยงาม
คุณสมบัติหลักของเกม PG Slot ได้แก่
มีรอบโบนัสให้ลุ้นบ่อย
Multiplier
โหมดทดลองเล่นฟรี
ใช้งานภาษาไทยง่าย
ระบบการเงินรวดเร็ว ทำรายการไว
แพลตฟอร์ม pg slot ส่วนใหญ่รองรับ การฝาก-ถอน ออโต้ตลอด 24 ชม. ขั้นต่ำเริ่มต้นเพียง 1 บาท ขึ้นอยู่กับ ระบบของผู้ให้บริการ การทำรายการใช้เวลา รวดเร็วมาก ผ่าน QR Code หรือระบบ Mobile Banking ทำให้ธุรกรรมเป็นไปอย่าง ลื่นไหล
แนวเกมที่คนเล่นเยอะ ใน PG Slot
เกม สล็อต PG มีธีมหลากหลาย เช่น
ธีม เทพเจ้าและแฟนตาซี
ธีม ลุยด่าน
ธีม โชคลาภ
ธีม ธรรมชาติ
หลายคนชอบเกมที่โบนัสเข้าไว พร้อมระบบ โบนัสรอบพิเศษ และ อัตราการจ่ายที่สูง เหมาะกับทั้ง คนเพิ่งเล่น และ สายสล็อตจริงจัง
ความปลอดภัย
PG Slot มีมาตรฐานรองรับ มีการ รักษาความปลอดภัย และใช้ระบบสุ่มผล ระบบสุ่มมาตรฐาน เพื่อให้ผลลัพธ์ ตรวจสอบได้ แพลตฟอร์มที่ให้บริการ pg slot ควรมี ระบบดูแลข้อมูล
บทสรุปท้ายบท
PG Slot เป็นตัวเลือกยอดนิยมสำหรับผู้ที่ต้องการเล่นสล็อตออนไลน์ ด้วยจุดเด่นด้าน ระบบลื่นไหล และการทำธุรกรรมที่ ไว ผู้เล่นสามารถเริ่มต้นได้ ไม่ซับซ้อน ฝากถอนสะดวก และเลือกเกมได้ หลากหลายแนว เหมาะสำหรับ ผู้เล่นทุกสไตล์ ในโลกของเกมสล็อตออนไลน์
мелбет казино
Скачать приложение Melbet: APK, iPhone и компьютер
Мобильная версия Melbet объединяет букмекерскую контору и казино в одном интерфейсе. Пользователю доступны live-ставки, казино-игры, прямые трансляции, статистика и операции по счёту. Установка занимает 1–2 минуты.
Android (APK)
Скачайте APK с официального источника, запустите установщик и завершите установку. Если требуется включите доступ к установке сторонних приложений, затем войдите в аккаунт.
iOS (iPhone)
Откройте App Store, найдите «Melbet», нажмите «Получить», после установки выполните вход.
ПК
Откройте официальный сайт, авторизуйтесь и добавьте ярлык на рабочий стол. Веб-версия работает как отдельное приложение.
Функционал
Live-ставки с мгновенным обновлением линии, игровой раздел с тысячами игр, просмотр матчей, аналитические данные, уведомления о матчах, быстрая регистрация и поддержка 24/7.
Бонусы
После загрузки доступны приветственный бонус, акционные коды и фрибеты. Условия зависят от региона.
Безопасность
Скачивайте только с официальных источников, контролируйте адрес сайта, не сообщайте данные доступа третьим лицам и активируйте двухфакторную аутентификацию.
Установка занимает несколько минут, после чего доступен весь функционал Melbet.
взгляните на сайте здесь https://ivremont.ru/price
Good afternoon!
Unlock society mysterious structures with interesting and valuable cultural facts and decode how communities function see on the website for sociology texts
Full information on the link – https://perevoz63.ru/pokupka-plastikovogo-dekorativnogo-zabora-dlya-klumb-optom-vybor-preimuschestva-i-osobennosti.html
All the best and development in business!
additional hints Driada Medical Methandienone
useful content what is Driada Medical telegram
anonymous is Driada Medical based in Italy
his explanation Driada Medical manager
check my reference Driada Medical most popular
check this site out Driada Medical Viagra
their explanation Driada Medical results
investigate this site Driada Medical bank transfer
Recommended Reading Driada Medical coupon code
Web Site is Driada Medical real
this article Driada Medical manual processing
go to this web-site Driada Medical bodybuilding
my website Driada Medical Masteron
see post Driada Medical UK delivery
site link Driada Medical Nolvadex
like this does Driada Medical have discreet packaging
Visit This Link what payment does Driada Medical accept
read here Driada Medical catalog
Full Report Driada Medical email
you can look here Driada Medical EU warehouse
this hyperlink Driada Medical Europe
rufus windows 11 Rufus remains a compact, free, open source utility designed to create bootable USB drives. It helps users prepare a USB flash drive that can set up an operating system, run diagnostic tools, or start a recovery environment. The program requires no installation and can be run right after download.
The main function of Rufus is helping users to create bootable USB media from ISO images with speed and stability. This allows users to install or run operating systems directly from a USB flash drive without the need for DVDs. The tool supports a broad selection of operating systems and service utilities, which makes it practical for both regular users and system administrators.
Rufus works on computers with Microsoft Windows, starting from Windows 7. Both 32-bit and 64-bit versions are supported, and there is also a version available for ARM64 architecture.
The software allows users to create bootable USB drives from many different ISO images. It can be used to prepare a USB drive for installing Windows 11, Windows 10, Windows 8.1, or Windows 7, as well as various Linux distributions. Rufus also works with DOS systems and other recovery or maintenance tools commonly used for troubleshooting computers.
One of the included features of Rufus is the ability to download official Windows ISO images directly from Microsoft servers. This allows users to obtain original installation images for Windows 8.1, Windows 10, and Windows 11 without searching for them on third-party websites.
In addition to creating bootable drives, Rufus can format USB devices. It supports several file systems including FAT32, NTFS, exFAT, UDF, and ReFS. This flexibility allows the USB drive to be prepared for different use cases and compatibility requirements.
Rufus supports both legacy BIOS systems and modern UEFI environments. Because of this, bootable drives created with Rufus can work on older computers as well as newer systems that use UEFI and Secure Boot.
Another feature included in Rufus is Windows To Go support. This option allows users to run a full Windows environment directly from a USB drive. It can be useful for testing systems, performing maintenance, or working on multiple computers without installing Windows on the internal drive.
Rufus also provides the option to bypass certain Windows 11 installation requirements. When creating an installation USB, the program can disable checks for TPM 2.0, Secure Boot, and minimum RAM requirements. This makes it possible to install Windows 11 on computers that would otherwise not meet the official hardware requirements.
One of the reasons Rufus has become popular is its speed and simplicity. The program is extremely small, about 1.9 MB in size, and runs as a portable application without installation. It is distributed under the GPL v3 open-source license, supports more than 70 languages, and contains no advertisements, bundled software, or tracking components.
Rufus works with a large number of ISO images. These include multiple versions of Windows, Windows Server editions, FreeDOS, and various system tools such as GParted, Hiren’s Boot CD, Parted Magic, and Clonezilla. Because of this wide compatibility, the program can be used not only for installing operating systems but also for disk management, data recovery, and system maintenance tasks.
To use Rufus, a computer running Windows 7 or later and a USB flash drive are required. The program does not need to be installed. Users simply download the executable file, run it, select the ISO image they want to use, and create a bootable USB drive. Due to its simplicity, speed, and reliability, Rufus remains one of the most widely used tools for creating bootable USB drives.
click here for more Driada Medical Letrozole
Recommended Reading Driada Medical eroids rating
Mas’uliyatli o‘yin odatini 888starz uzda qo‘llab-quvvatlash muhim|
Xavfsiz va mas’uliyatli o‘yin muhiti 888starz uzda yaratiladi, foydalanuvchilar uchun keng imkoniyatlar ochiladi
888starz yuklash https://888starzbet-uz.com/apk/
More Info Driada Medical reddit thread
anonymous Driada Medical Clenbuterol
скачать приложение мелбет на телефон
Установить приложение Melbet: Android, iPhone и ПК
Мобильная версия Melbet включает ставки и казино в едином приложении. Доступны live-ставки, казино-игры, прямые трансляции, статистика и быстрые финансовые операции. Загрузка занимает несколько минут.
Android (APK)
Загрузите APK с официального источника, запустите установщик и подтвердите установку. Если требуется включите доступ к установке сторонних приложений, затем войдите в аккаунт.
iOS (iPhone)
Перейдите в App Store, найдите «Melbet», выберите «Получить», после установки выполните вход.
ПК
Откройте официальный сайт, авторизуйтесь и добавьте ярлык на рабочий стол. Веб-версия работает как отдельное приложение.
Функционал
Live-ставки с обновлением коэффициентов, игровой раздел с тысячами игр, прямые трансляции, аналитические данные, уведомления о матчах, регистрация за минуту и поддержка 24/7.
Бонусы
После загрузки доступны бонус на первый депозит, промокоды и бесплатные ставки. Правила начисления определяются регионом.
Безопасность
Скачивайте только с официальных источников, проверяйте домен, не сообщайте данные доступа третьим лицам и включите 2FA.
Загрузка выполняется быстро, после чего открывается полный доступ Melbet.
view website Driada Medical IBAN payment
Назорат va mas’uliyat: 888starz uzda mas’uliyatli o‘yin odatini rag‘batlantirish muhim o‘rin tutadi|
Qidiruvlar va maslahatlar: 888starz uz foydalanuvchilarga yangiliklar, promo aksiyalar va yangi o‘yinlarni kuzatish imkoniyatini taqdim etadi
888starz bet casino https://888starzbet-uz.com/
visit Driada Medical HGH
Going Here Driada Medical vs Balkan
he said Driada Medical alternative
click over here Driada Medical real steroids
why not look here Driada Medical not fake
try this site Driada Medical warehouse Belgium
Full Report is Driada Medical legit
Platformada yutuqlarni tez yotqizish, mijozlar xizmatlari orqali tezkor yordam olish va xavfsiz tarjimai hol bilan shug‘ullanish mumkin|
Yangiliklar, promo aksiyalar va yangi o‘yinlarni kuzatish imkoniyati bilan 888starz uz foydalanuvchilarini rag‘batlantiradi
888starz уз https://888starzbet-uz.com/
pop over to this web-site Driada Medical vs Alpha Pharma
her explanation Driada Medical blood test
Your blog has become my go-to source for inspiration and motivation Thank you for consistently delivering high-quality content
Shaxsiy tarjimai hol, yutuqlarni tez yotqizish va mijozlar xizmatlari orqali tez yordam olish mumkin|
888starz uz foydalanuvchilar uchun xavfsiz, mas’uliyatli o‘yin muhitini ta’minlab, keng qamrovli imkoniyatlar sunadi
888starz app ios https://888starzbet-uz.com/apk/
informative post Driada Medical payment
click for more Driada Medical IBAN
navigate to this web-site Driada Medical HCG
see it here Driada Medical affiliate
try this out Driada Medical scam check
read this post here Driada Medical 2026
try this site is Driada Medical safe
i loved this Driada Medical warehouse Belgium
official statement Driada Medical forum discussion
888starz uz — raqamlar va imkoniyatlar olamidagi o‘yinlar dunyosi bo‘lib, har bir foydalanuvchi xavfsiz o‘yin tajribasini quradi|
Yordam xizmatlari 24/7 faol bo‘lib, o‘yinchilarga tez yordam beradi
888 старс https://888starzbet-uz.com/
Extra resources Driada Medical peptides
888starz uzda mas’uliyatli o‘yin odatini rag‘batlantirish muhim hisoblanadi|
Interfeys va yordam: O‘yinchilarga yordam berish xizmatlari 24/7 faoliyat ko‘rsatadi
888starz https://888starzbet-uz.com/
navigate to this site betswap promo code
chz try – kripto para chz, cro usdt
navigate to these guys betswap gg
hop over to this site betswaps
felink – usdttry, ltc try
click site payward trading limited
cro usdt – flx coin, clz coin
chiliz coin anlaşmaları – cro usdt, chiliz anlık
advice mt gox payout date
The terpene – https://terpenewarehouse.com/products/lemon-alien-dawg-terpenes delivers a unconventional, botanical savour with distinct depth and character. Each note blends logically, creating a cultivated profile slightly than a distinct dominant scent. The product arrived extravagantly packaged, with intricate descriptions included. It feels consistent and professionally made, with distinction clear from foremost mark to final use.
Kuchli parol siyosati va ikki faktorli tasdiqlash orqali hisoblar xavfsiz qilingan|
Xulosa: Platforma xavfsiz, mas’uliyatli o‘yin muhitini ta’minlaydi va foydalanuvchilar uchun keng imkoniyatlar yaratadi
888starz application https://888starzbet-uz.com/apk/
https://betwarrior.cat/
En 2026, BetWarrior se establece como una de las plataformas de casino online y apuestas deportivas mas destacadas de Argentina, ofreciendo una promocion de bienvenida de hasta $500.000 ARS para nuevos jugadores. Poseyendo licencia oficial y un compromiso en la seguridad, el portal garantiza una experiencia de juego transparente y confiable para el publico local. Los usuarios encuentran de miles de juegos de desarrolladores de primer nivel como Evolution y Pragmatic Play, realizar apuestas deportivas en vivo y administrar su dinero de manera sencilla en pesos argentinos, todo ello desde una aplicacion movil preparada para Android e iOS.
official site mtgox payout
xlm try – flx coin, felink
Kirish: 888starz uz — bu raqamlar va imkoniyatlar olamidagi o‘yinlar dunyosi, ular orqali har kim o‘z xavfsiz o‘yin tajribasini yaratishi mumkin|
Foydalanuvchilar uchun yangiliklar, promo aksiyalar va yangi o‘yinlar haqida tez-tez xabardor bo‘lish imkoniyati ko‘rsatiladi
88starz download https://888starzbet-uz.com/apk/
click here for info betswap gg
navigate to this website the pass app reviews
chz coin try – kripto para chz, ltc try
litecoin al – clz coin, chz coin try
official statement betswap gg
read more mt.gox claim
check it out pass.app
Sprawdz poradnik jaka kamera do drona fpv, jesli szukasz najlepszych wskazowek przy wyborze kamery FPV na start.
Trafny wybor kamery przeklada sie na lepsze doznania podczas pilotowania i lepsze ujecia.
our website pass.app
anchor payward trading limited
official website mt gox news
discover this info here mt gox news
his comment is here mt gox news
Continue mt gox news
Continued exchange mt gox
official statement mtgox login
Рскал инфу РїРѕ локальному SEO РїРѕРґ РќРѕРІРѕСЃРёР±РёСЂСЃРє. Попался подробный гайд: РѕС‚ СЃР±РѕСЂР° ключей СЃ районами РґРѕ регистрации РІ Яндекс Рё Google. Понравился блок РїСЂРѕ анализ конкурентов Рё отзывы. Делюсь: https://mokoskr.ru/seo-v-novosibirske-polnoe-rukovodstvo-po-jeffektivnomu-prodvizheniju-sajta-v-stolice-sibiri/ . Сам уже РІР·СЏР» РЅР° заметку пару фишек.
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
In questo testo analizzeremo le caratteristiche chiave di Crazy Time, le tattiche diffuse e l’esperienza del giocatore nei casino italiani.
evolution crazy time eurobet https://lenoralivingston.com/
“stor perde y?kama evde nas?l y?kan?r” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Kendiniz gorun: https://hobiyapma.com/articles/stor-perde-yikama-nasil-yikanir/
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
Durante la sessione, e opportuno stabilire limiti di spesa e di tempo per garantire una gestione responsabile del gioco.
crazy time estrazioni https://lenoralivingston.com/
Go Here mt gox payout date
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
Crazy Time resta uno dei contenuti piu chiacchierati nel settore dei casino online italiani, grazie all’energia, alla varieta e alle possibilita di payout elevate.
pachinko crazy time https://lenoralivingston.com/
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
Per iniziare, e sufficiente registrarsi su una piattaforma di casino affidabile, effettuare un deposito e scegliere Crazy Time tra le opzioni disponibili.
crazy time soldi virtuali https://lenoralivingston.com/
Sprawdz poradnik pierwsza kamera fpv, jesli szukasz najlepszych wskazowek przy wyborze kamery FPV na start.
Trafny wybor kamery przeklada sie na lepsze doznania podczas pilotowania i lepsze ujecia.
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
L’elemento sociale e la chance di vincite consistenti aumentano l’esperienza di intrattenimento molto apprezzata dai giocatori italiani.
crazy time risultati https://lenoralivingston.com/
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
L’elemento sociale e la chance di vincite consistenti aumentano l’esperienza di intrattenimento molto apprezzata dai giocatori italiani.
tracksino crazy time https://lenoralivingston.com/
Bu arada, eger uyumlu renkler bordo duvar boyas? konusuyla ilgileniyorsan?z, buray? inceleyin. Suradan okuyabilirsiniz: https://evhobileri.com/articles/bordo-duvar-boyasi-uyumlu-renkler/
Bu arada, eger yuz bak?m? konusuyla ilgileniyorsan?z, suraya bir goz at?n. Kendiniz gorun: https://kendifikirler.com/articles/yuz-bakim-rutini-cilt-sagligi-adimlar/
Bu arada, eger kreatin iceren besinler konusuyla ilgileniyorsan?z, suraya bak?n. Link burada: https://bedensport.com/articles/kreatin-besinler-spor-performansi-artir/
мелбет казино слоты скачать
Скачать приложение Melbet: Android, iOS и компьютер
Приложение Melbet объединяет ставки и казино в одном интерфейсе. Доступны live-ставки, казино-игры, прямые трансляции, статистика и операции по счёту. Загрузка занимает 1–2 минуты.
Android (APK)
Загрузите APK с официального источника, откройте файл и завершите установку. Если требуется включите разрешение на установку из неизвестных источников, затем войдите в аккаунт.
iOS (iPhone)
Перейдите в App Store, найдите «Melbet», нажмите «Получить», после установки авторизуйтесь в системе.
ПК
Перейдите официальный сайт, войдите в личный кабинет и создайте ярлык на рабочий стол. Браузерная версия функционирует как полноценное приложение.
Функционал
Live-ставки с обновлением коэффициентов, игровой раздел с тысячами игр, прямые трансляции, подробная статистика, push-оповещения, быстрая регистрация и круглосуточная служба поддержки.
Бонусы
После установки доступны бонус на первый депозит, промокоды и бесплатные ставки. Условия зависят от региона.
Безопасность
Скачивайте только с официальных источников, проверяйте домен, не передавайте пароль третьим лицам и включите 2FA.
Установка занимает несколько минут, после чего доступен весь функционал Melbet.
смотреть здесь https://reim.ink
ele yap?san japon yap?st?r?c?s? nas?l c?kar hakk?ndaki makaleyi tavsiye ederim. Suradan okuyabilirsiniz: https://kendifikirler.com/articles/ele-yapislan-japon-yapistiricisi-nasil-cikarilir/
в этом разделе https://reim.ink/
здесь https://ufolabs.xyz
посмотреть на этом сайте https://ufolabs.xyz
banyo lif y?l?n modas? ceyizlik lif modelleri hakk?ndaki yaz?y? cok sevdim. Link burada: https://kendihobim.com/articles/banyo-lif-modasi-ceyizlik-modeller/
посмотреть в этом разделе что такое майнинг
здесь https://ufolabs.cc
перенаправляется сюда https://ufolabs.io
смотреть здесь https://ufolabs.cc
Следующая страница https://ufolabs.io
смотреть здесь https://ufolabs.xyz
подробнее antminer s21
выберите ресурсы что такое майнинг
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
L’elemento sociale e la chance di vincite consistenti aumentano l’esperienza di intrattenimento molto apprezzata dai giocatori italiani.
casino crazy time https://lenoralivingston.com/
каталог https://ufolabs.io
Продолжение antminer s21
узнать больше что такое майнинг
в этом разделе https://ufolabs.cc/
посетить веб-сайт antminer l9
нажмите здесь antminer l9
каталог майнинг
Читать далее whatsminer m50
можно проверить ЗДЕСЬ https://ufolabs.cc/
продолжить https://ufolabs.xyz
этот сайт https://ufolabs.cc
узнать больше https://ufolabs.cc/
веб-сайт whatsminer m50
найти это майнинг криптовалюты
Читать далее whatsminer m50
Смотреть здесь antminer l9
нажмите, чтобы подробнее майнинг
сайт https://ufolabs.cc/
подробнее майнинг
узнать больше что такое майнинг
веб-сайте майнинг криптовалюты
в этом разделе antminer l9
Подробнее antminer s19
Bu arada soyleyeyim, eger slazenger kimin konusuyla ilgileniyorsan?z, buray? inceleyin. Suradan okuyabilirsiniz: https://dinamikstil.com/articles/slazenger-marka-degerlendirme/
Перейти на сайт vodka bet
Узнать больше vodkabet
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
Crazy Time integra ruote della fortuna, premi bonus e una dinamica di gioco estremamente vivace, proponendo un mix adatto sia ai nuovi arrivati sia agli high-rollers.
crazy time ultime uscite https://lenoralivingston.com/
нажмите водка бэт
продолжить водка бет
посмотреть на этом сайте водка бэт
Смотреть здесь vodka bet
Источник водка бет
продолжить vodka bet
можно проверить ЗДЕСЬ казино водка бет vodkabet
интернет зеркало водка бет
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
Ogni turno puo sbloccare bonus come Pachinko, Coin Flip, Cash Hunt o Crazy Time, con premi che variano in base al segmento della ruota.
crazy time live stream https://lenoralivingston.com/
зайти на сайт vodka bet casino
этот сайт vodka bet casino
проверить сайт vodkabet
такой зеркало водка бет
перейдите на этот сайт казино водка бет vodkabet
Следующая страница казино водка бет vodkabet
Статья про особенности поисковой конкуренции на Урале. Понравилось, что автор не просто описывает проблему, а даёт конкретные инструменты: от сбора локальных ключей до использования Яндекс.Бизнеса и работы с репутацией. Есть блок про мобильную оптимизацию и поведенческие факторы. Полезно: https://solsalut.ru/osobennosti-poiskovoj-konkurentsii-na-urale/
опубликовано здесь зеркало водка бет
Перейти на сайт казино водка бет vodkabet
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
Crazy Time e uno degli slot piu discussi nei casino online italiani, con bonus rounds che tengono viva l’attenzione dei giocatori.
crazy time italia live stats https://lenoralivingston.com/
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
Crazy Time integra ruote della fortuna, premi bonus e una dinamica di gioco estremamente vivace, proponendo un mix adatto sia ai nuovi arrivati sia agli high-rollers.
crazy time ultime giocate https://lenoralivingston.com/
узнать больше vodka casino
Смотреть здесь vodkabet
посмотреть в этом разделе vodkabet
Продолжение казино водка бет vodkabet
читать казино водка бет vodkabet
содержание vodka bet
Смотреть здесь vodka bet casino
Подробнее здесь vodka bet
веб-сайт vodka bet
посмотреть на этом сайте казино водка бет vodkabet
подробнее казино водка бет vodkabet
продолжить казино водка бет vodkabet
зайти на сайт vodka bet casino
ссылка на сайт казино водка бет vodkabet
подробнее здесь vodkabet
посмотреть на этом сайте vodka bet
подробнее vodka bet casino
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
Crazy Time rimane uno degli spettacoli piu discussi del panorama dei casino online in Italia, grazie alla sua energia, varieta e potenziale payout alto.
crazy time lottomatica https://lenoralivingston.com/
Следующая страница зеркало водка бет
в этом разделе vodka casino
узнать больше Здесь vodka bet casino
найти это зеркало водка бет
здесь казино водка бет vodkabet
Смотреть здесь казино водка бет vodkabet
этот контент vodka casino
опубликовано здесь зеркало водка бет
этот сайт зеркало водка бет
Следующая страница водка бет
смотреть здесь зеркало водка бет
можно проверить ЗДЕСЬ водка бэт
нажмите vodka bet
Источник vodka bet
перейдите на этот сайт водка бэт
здесь vodka bet
перейти на сайт водка бэт
нажмите vodka bet
зайти на сайт vodkabet
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
La versione standard di Crazy Time permette di puntare su una ruota enorme che definisce il tipo di bonus o moltiplicatore.
live crazy time https://lenoralivingston.com/
В статье подробно разбирается, за счёт чего локальный бизнес может выиграть у федералов. Автор выделяет слабые стороны крупных игроков (низкая адаптация под регион, медленная реакция) и показывает, как этим пользоваться. Есть примеры локальных ключей и советы по работе с Яндексом. Рекомендую: https://lefmun.ru/stati/bitva-za-ural-kak-lokalnomu-biznesu-iz-ekaterinburga-vyigrat-u-federalnyh-gigantov-v-poiske/
Продолжение водка бэт
сайт vodka bet casino
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
La modalita base di Crazy Time permette di scommettere su una ruota gigante che determina il tipo di bonus o moltiplicatore.
crazy time sisal https://lenoralivingston.com/
пояснения казино водка бет vodkabet
узнать больше казино водка бет vodkabet
Подробнее здесь vodka bet casino
посмотреть в этом разделе зеркало водка бет
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
L’elemento sociale e la chance di vincite consistenti aumentano l’esperienza di intrattenimento molto apprezzata dai giocatori italiani.
crazy time bot https://lenoralivingston.com/
перейдите на этот сайт vodka bet casino
зайти на сайт vodka bet casino
ornek tuval cal?smalar? hakk?ndaki yaz?y? gercekten begendim. Link burada: https://kendimacera.com/articles/ornek-tuval-calismalari-yaraticilik/
Главная водка бэт
кликните сюда casino vodka
в этом разделе vodka bet casino
Перейти на сайт казино водка бет vodkabet
Смотреть здесь vodkabet
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
Durante la sessione, e utile definire limiti di spesa e di tempo per mantenere una gestione responsabile del gioco.
crazy time stat https://lenoralivingston.com/
каталог водка бэт
нажмите здесь зеркало водка бет
подробнее здесь водка бэт
Подробнее зеркало водка бет
посетить сайт казино водка бет vodkabet
Your blog is so much more than just a collection of posts It’s a community of like-minded individuals spreading optimism and kindness
Перейти на сайт зеркало водка бет
Перейти на сайт vodka bet
проверить сайт казино водка бет vodkabet
Продолжение водка бэт
здесь vodka bet
содержание vodkabet
Читать далее водка бэт
опубликовано здесь vodka bet
Смотреть здесь vodka bet casino
проверить сайт vodkabet
узнать больше казино водка бет vodkabet
содержание зеркало водка бет
Смотреть здесь водка бэт
Great explanation and very informative. You can tell a lot of effort went into this.
https://betmexico.cat/
La plataforma de Betmexico se consolida en 2026 como el casino virtual y plataforma de apuestas deportivas mas importante para el mercado mexicano, llamando la atencion por su novedoso bono sin deposito de $50 MXN libre de rollover, una iniciativa sin precedentes que elimina las exigencias comunes de la competencia.
каталог казино водка бет vodkabet
узнать больше vodka bet casino
содержание зеркало водка бет
взгляните на сайте здесь казино водка бет vodkabet
Источник vodkabet
Смотреть здесь водка бэт
веб-сайт водка бет
можно проверить ЗДЕСЬ vodka casino
выберите ресурсы vodkabet
интернет vodka casino
Подробнее казино водка бет vodkabet
Следующая страница водка бэт
смотреть здесь casino vodka
кликните сюда vodkabet
каталог vodka casino
Хороший разбор темы накрутки поведенческих факторов. Автор подробно объясняет, что такое ПФ, какие методы накрутки существуют и чем это может грозить. Понравилось, что в конце дают легальные альтернативы для улучшения метрик. Тем, кто задумывается о таком инструменте, рекомендую почитать: https://1c-aytias.ru/nakrutka-povedencheskih-faktorov-illyuziya-uspeha-ili-rabochiy-instrument/
здесь казино водка бет vodkabet
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
La modalita principale di Crazy Time consente di scommettere su una grande ruota che decide il tipo di bonus o moltiplicatore.
crazy time demo https://lenoralivingston.com/
renkler nas?l olusur hakk?ndaki yaz?y? tavsiye ederim. Link burada: https://kendifikirler.com/articles/renkler-nasil-olusur/
“evde kekik yakmak” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Link burada: https://evhobisi.com/articles/evde-kekik-yakma-faydalari-yontemleri/
нажмите здесь vodka bet casino
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
Le probabilita sono accompagnate da una grafica vivace, suoni accattivanti e animazioni fluide che rendono l’esperienza molto coinvolgente.
crazy time prova https://lenoralivingston.com/
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
Ogni giro puo liberare bonus come Pachinko, Coin Flip, Cash Hunt o Crazy Time, con premi che differiscono a seconda del settore della ruota.
stata crazy time https://lenoralivingston.com/
сюда водка бэт
Кто ищет, где заказать накрутку ПФ, вот статья с конкретным сервисом и ценами от 15 000 рублей. Расписано, зачем это нужно, какие риски и как проходит процесс заказа. Информация для тех, кто решил попробовать этот метод: https://stroika-tovar.ru/articles/stati/effektivnaya-nakrutka-pf-yandeks-kak-zakazat-po-dostupnoy-tsene-ot-15-000-rubley.html
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
La modalita base di Crazy Time permette di scommettere su una ruota gigante che determina il tipo di bonus o moltiplicatore.
crazy time gratis https://lenoralivingston.com/
подробнее vodkabet
выберите ресурсы казино водка бет vodkabet
Bu arada soyleyeyim, eger sirke ile kedi piresi temizleme konusuyla ilgileniyorsan?z, suraya bir goz at?n. Link burada: https://kendihobim.com/articles/sirke-kedi-piresi-temizleme/
From a technical standpoint, heaps of win performs exceptionally well with minimal load times and a responsive mobile-friendly interface that scales seamlessly accross devices; the UI is intuitive with solid navigational hierachy throughout the platform
смотреть здесь vodka bet casino
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
La modalita base di Crazy Time permette di scommettere su una ruota gigante che determina il tipo di bonus o moltiplicatore.
crazy time calculator https://lenoralivingston.com/
Preparati a vivere l’esperienza Crazy Time al massimo, tra slot, bonus e statistiche live dal cuore dell’Italia.
La versione standard di Crazy Time permette di puntare su una ruota enorme che definisce il tipo di bonus o moltiplicatore.
watch crazy time https://lenoralivingston.com/
посетить веб-сайт vodkabet
нажмите здесь водка бэт
Bu arada soyleyeyim, eger ac karn?na su icmenin faydalar? konusuyla ilgileniyorsan?z, buray? inceleyin. Iste link: https://atletikhayal.com/articles/sabah-ac-karnina-su-icmenin-faydalari/
Отличный разбор темы — как местному бизнесу из Екатеринбурга выигрывать у федералов в поиске. Автор подробно останавливается на локальном SEO, гиперрелевантном контенте, скорости и сервисе как факторах ранжирования. Есть блок про микро-ниши и локальный линкбилдинг. Очень рекомендую: https://go-patriot.ru/bitva-za-ural-kak-lokalnomu-biznesu-iz-ekaterinburga-vyigrat-u-federalnyh-gigantov-v-poiske/
посмотреть на этом сайте vodka bet casino
страница казино водка бет vodkabet
узнать водка бет
try this website https://smmpanel.ooo
redirected here https://smmpanel.name/
Продолжение https://app.reim.ink/#
Подробнее казино водка бет vodkabet
you can find out more https://smmpanel.one
Статья про особенности поисковой конкуренции на Урале. Понравилось, что автор не просто описывает проблему, а даёт конкретные инструменты: от сбора локальных ключей до использования Яндекс.Бизнеса и работы с репутацией. Есть блок про мобильную оптимизацию и поведенческие факторы. Полезно: https://solsalut.ru/osobennosti-poiskovoj-konkurentsii-na-urale/
kaktus cicegi anlam? hakk?ndaki bolumu cok sevdim. Kendiniz gorun: https://hobielyazma.com/articles/kaktus-cicegi-anlami-ve-sembolleri/
такой водка бэт
смотреть здесь vodka bet
такой https://app.reim.ink/#/
опубликовано здесь https://app.reim.ink/#
здесь казино водка бет vodkabet
узнать больше Здесь vodka bet casino
пояснения https://app.reim.ink/#
интернет vodkabet
my review here https://smmpanel.su/
web link https://smmpanel.su
нажмите здесь водка бет
подробнее vodka bet
Читать далее vodka casino
интернет vodka bet casino
здесь vodka bet casino
ссылка на сайт vodka bet casino
продолжить https://t.me/vpnsmmone
сайт зеркало водка бет
посетить веб-сайт водка бэт
можно проверить ЗДЕСЬ https://app.reim.ink/#/
why not try here https://smmpanel.one
their website https://smmpanel.su/
узнать https://app.reim.ink/#
каталог https://app.reim.ink/#/
узнать больше Здесь https://app.reim.ink/#/
click to read https://smmpanel.one/
сюда https://app.reim.ink/#/
Bu arada soyleyeyim, eger tutsu faydalar? konusuyla ilgileniyorsan?z, buray? inceleyin. Link burada: https://hobielyazma.com/articles/tutsuler-ve-faydalari/
Discover updates here > http://madguy.ru/images/pgs/1xbet_promokod_pri_registracii_bonus_5.html
нажмите здесь https://slon4-at.at
найти это slon1.at
Смотреть здесь slon5 at
посмотреть в этом разделе https://slon4-at.at
здесь slon2 cc
зайти на сайт kraken market
сюда https://slon4-at.at/
взгляните на сайте здесь https://slon4-at.at
страница slon1.at
Главная ссылка на кракен
подробнее кракен тор
подробнее здесь slon2 at
Главная kraken официальный сайт
посетить веб-сайт https://slon4-at.at
каталог кракен даркнет
найти это https://slon4-at.at
Главная https://slon4-at.at/
https://cassiteleri.buzz/# casino deneme siteleri
подробнее здесь https://slon4-at.at
выберите ресурсы https://slon4-at.at
Подробнее https://slon4-at.at/
здесь кракен официальный сайт
этот контент ссылка на кракен
здесь kraken market
посетить веб-сайт кракен войти
зайти на сайт ссылка на кракен
найти это кра сайт
читать slon4 cc
сайт https://slon4-at.at/
найти это slon1.cc
проверить сайт https://slon4-at.at
кликните сюда https://slon4-at.at/
здесь https://slon4-at.at
Bu arada, eger kucuk banyo fayans modelleri konusuyla ilgileniyorsan?z, buray? inceleyin. Iste link: https://hobiprojesi.com/articles/kucuk-banyolar-icin-fayans-modelleri/
“pre workout nas?l kullan?l?r” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Iste link: https://atletikhayal.com/articles/pre-workout-takviyeleri-faydalari-kullanimi/
продолжить slon3.cc
опубликовано здесь https://slon4-at.at/
интернет kraken
посмотреть на этом сайте https://slon4-at.at/
посетить сайт https://slon4-at.at
каталог кра сайт
можно проверить ЗДЕСЬ kraken официальный сайт
узнать больше kraken зеркало
Читать далее кракен маркетплейс
перенаправляется сюда slon1.cc
узнать больше https://slon4-at.at/
нажмите kraken зеркало
страница https://slon4-at.at/
сайт https://slon4-at.at
найти это slon2 cc
продолжить https://slon4-at.at/
кликните сюда slon2 cc
смотреть здесь кракен ссылка
Подробнее slon4 at
посетить веб-сайт kraken shop
интернет https://slon4-at.at
другие kraken вход
нажмите здесь https://slon4-at.at/
содержание slon-4-at.cc
узнать https://slon4-at.at
сайт кракен даркнет
смотреть здесь https://slon4-at.at/
такой https://slon4-at.at/
Подробнее здесь кракен мп
Главная кракен тор
веб-сайт https://slon4-at.at/
https://5.135.151.46/home.php?mod=space&uid=12567325&do=profile
сайт кракен ссылка
на этом сайте https://slon4-at.at
опубликовано здесь https://slon4-at.at
сайт кракен зеркало
Смотреть здесь slon4 cc
Смотреть здесь как зайти на кракен
этот контент кракен зеркало
кликните сюда slon4.cc
нажмите, чтобы подробнее slon3 cc
ссылка на сайт kraken ссылка
страница https://slon4-at.at
интернет kra at
подробнее https://slon4-at.at
перейдите на этот сайт кракен ссылка
узнать больше кракен зеркало
Читать далее https://slon4-at.at/
этот сайт kraken войти
узнать больше Здесь https://slon4-at.at
узнать больше slon-4-at.cc
перейти на сайт кракен магазин
Продолжение https://slon4-at.at
каталог кракен тор
подробнее кракен официальный сайт
Ayr?ca, eger elbisedeki boya nas?l c?kar konusuyla ilgileniyorsan?z, suraya bak?n. Link burada: https://kendimacera.com/articles/kiyafetlerde-boya-lekesi-cikarma-yontemleri/
продолжить https://slon4-at.at/
Смотреть здесь https://slon4-at.at
узнать больше https://slon4-at.at
нажмите здесь slon1.at
страница https://slon4-at.at
здесь кракен актуальная ссылка
перенаправляется сюда slon4 cc
Смотреть здесь Площадка кракен
здесь кракен мп
посмотреть на этом сайте кракен магазин
подробнее kraken ссылка
веб-сайте https://slon4-at.at
такой https://slon4-at.at/
gdzie można kupić prawo jazdy z wpisem do rejestru, gdzie kupić prawo jazdy, jak kupić prawo jazdy, w jakim kraju można kupić prawo jazdy, gdzie kupić prawo jazdy kat b, jak kupić prawo jazdy na lewo, jak kupić prawo jazdy w polsce, gdzie można kupić prawo jazdy, prawo jazdy kupno, jak kupic prawo jazdy kat b, gdzie mozna kupic prawojazdy, czy można kupić prawo jazdy, prawo jazdy bez egzaminu, legalne prawo jazdy do kupienia, kupie prawo jazdy, kupię prawo jazdy z wpisem, prawo jazdy do kupienia, gdzie można kupić prawo jazdy, gdzie można kupić prawo jazdy z wpisem do rejestru forum, gdzie można kupić prawo jazdy b legalne, europejskie prawo jazdy bez egzaminu, kupic prawo jazdy w polsce, kupienie prawa jazdy, kupię prawo jazdy, jak załatwić prawo jazdy na lewo, prawo jazdy kupie, kupię prawo jazdy, legalne prawo jazdy do kupienia, jak kupic prawo jazdy kat b, sprzedam prawo jazdy z wpisem bez zaliczek, prawo jazdy do kupienia, gdzie mozna kupic prawojazdy, europejskie prawo jazdy bez egzaminu, legalne prawo jazdy do kupienia, kupno prawa jazdy, Gdzie Kupić Prawo Jazdy Legalnie?
jnhb
подробнее slon1 at
на этом сайте slon2 cc
каталог kraken войти
comprare patente b, e legale comprare la patente, comprare una patente napoli, patente originale, comprare patente c, acquisto patente b, comprare patente prezzo, compro patente, acquistare patente b napoli, dove posso comprare la patente b, compra patente online, comprare patente b online, comprare la patente a napoli, dove si può comprare la patente, quanto costa comprare la patente, comprare patente di guida, comprare patente senza esame, patente comprata prezzo, come comprare patente b napoli, comprare patente a, patente online comprare, quanto costa la patente a napoli, comprare patente Nautica, patente da comprare, Comprare patente Napoli . Comprare patente registrata presso Motorizzazione civile (DMV)?
jnhb
Источник кракен открыть
перейдите на этот сайт kraken вход
посмотреть в этом разделе https://slon4-at.at/
читать кракен сайт
Следующая страница slon1.cc
сайт slon2 at
нажмите кракен официальная ссылка
нажмите https://slon4-at.at/
Смотреть здесь кра сайт
Смотреть здесь kraken зайти
перенаправляется сюда кракен маркетплейс
https://betplay.cat/
BetPlay se consolida en 2026 como el portal destacado en apuestas deportivas y juegos de casino en linea en Colombia, debidamente habilitada por Coljuegos para funcionar con total legalidad y seguridad en el pais.
Bu arada soyleyeyim, eger akrilik boya mor nas?l yap?l?r konusuyla ilgileniyorsan?z, suraya bak?n. Kendiniz gorun: https://kendihobim.com/articles/akrilik-boya-mor-renk-elde-etmek/
“tahta cesitleri” konusu icin mukemmel bir kaynak var. Suradan okuyabilirsiniz: https://kendihobim.com/articles/mobilya-tahta-cesitleri-kullanim-alanlari/
в этом разделе кракен вход
здесь slon3.cc
Главная slon3 at
Всем привет! Делюсь найденным материалом. Статья про продвижение сайтов и развитие бизнеса в интернете. Хороший базовый обзор с акцентом на комплексный подход: SEO, контекст, SMM, аналитика. Особенно порадовал раздел про частые ошибки — полезно для самопроверки. Вот ссылка для тех, кому нужно структурировать знания: https://yana-troyanova.ru/stati/jeffektivnoe-prodvizhenie-sajtov-i-razvitie-biznesa-v-internete/
найти это https://slon4-at.at
Узнать больше slon4.at
кликните сюда кракен купить
Главная кракен тор
продолжить slon5.cc
Busy Bee Jumpers
45 Main Ѕt 6C, Wareham,
MA 02571, Unites Stateѕ
508-514-2005
inflatable rentals
узнать больше slon2.at
подробнее kraken зеркало
Искал информацию по ценам на SEO и наткнулся на статью про накрутку позиций в Яндексе. Тут разбирают, что вообще входит в SEO-услуги, от чего зависит стоимость и как не попасть на мошенников. Полезно для понимания рынка: https://vagaro.ru/nakrutka-poziczij-v-yandekse-chto-nuzhno-znat-o-seo-uslugah-i-ih-stoimosti/
Смотреть здесь https://slon4-at.at/
перенаправляется сюда https://slon4-at.at/
Смотреть здесь https://slon4-at.at
нажмите здесь https://slon4-at.at/
Перейти на сайт https://slon4-at.at
страница https://slon4-at.at/
кликните сюда https://slon4-at.at
опубликовано здесь https://slon4-at.at/
смотреть здесь https://slon4-at.at/
ссылка на сайт https://slon4-at.at/
Get the facts https://gta-san-andreas-apk.net/
Всем привет! Прочитал статью про продвижение сайтов и развитие бизнеса в сети. Хороший обзор, охватывает основные направления: от SEO и контекстной рекламы до автоматизации и выхода на международные рынки. Автор пишет про системный подход и важность аналитики. Может быть полезно владельцам бизнеса и маркетологам. Вот ссылка: https://midships.ru/jeffektivnoe-prodvizhenie-sajtov-i-razvitie-biznesa-v-internete/
from this source https://gta-san-andreas-apk.net/
“y?lbas? kap? susu yap?m? okul oncesi” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Link burada: https://kendifikirler.com/articles/yilbasi-kapi-susu-yapimi-okul-oncesi-fikirler/
my site https://v2-capcut-apk.com/
you could try this out https://v2-geometrydashapk.com/
Подробнее здесь https://slon4-at.at
нажмите здесь https://slon4-at.at/
look what i found https://gta-san-andreas-apk.net
этот сайт https://slon4-at.at
сайт https://slon4-at.at/
здесь https://slon4-at.at
веб-сайт https://slon4-at.at/
узнать больше https://slon4-at.at
перенаправляется сюда https://slon4-at.at
he said https://gta-san-andreas-apk.net/
ссылка на сайт https://slon4-at.at
more helpful hints https://v2-capcut-apk.com/
посмотреть в этом разделе https://slon4-at.at
опубликовано здесь https://slon4-at.at
view https://gta-san-andreas-apk.net/
казино икс официальный сайт
click this site https://v2-capcut-apk.com
pop over to this web-site https://v2-geometrydashapk.com
our website https://gta-san-andreas-apk.net/
read this article https://v2-geometrydashapk.com/
you can check here https://v2-geometrydashapk.com
click for more https://v2-capcut-apk.com/
Источник https://slon4-at.at
Подробнее здесь https://slon4-at.at
перейдите на этот сайт https://slon4-at.at/
address https://v2-geometrydashapk.com/
Продолжение https://slon4-at.at/
зайти на сайт https://slon4-at.at/
содержание https://slon4-at.at/
additional resources https://v2-geometrydashapk.com
веб-сайте https://slon4-at.at
get redirected here https://v2-capcut-apk.com
i was reading this https://v2-capcut-apk.com/
webpage https://v2-capcut-apk.com/
продолжить https://slon4-at.at/
Смотреть здесь https://slon4-at.at
Discover More https://v2-capcut-apk.com/
сюда https://slon4-at.at/
Homepage https://gta-san-andreas-apk.net
Наконец-то нашел внятное объяснение, что такое длина клика и почему она важна для Яндекса. Оказывается, накрутка поведенческих факторов в яндексе должна имитировать ситуацию, когда пользователь нашел ответ на сайте и не вернулся обратно в поиск. Это напрямую влияет на ранжирование. Автор подробно расписал механику last-click — советую вникнуть, чтобы понимать, за что вы вообще платите деньги.
this link https://v2-capcut-apk.com
blog https://gta-san-andreas-apk.net
go to the website https://v2-geometrydashapk.com/
узнать больше Здесь https://slon4-at.at
узнать больше https://slon4-at.at
игровые автоматы вулкан вегас
sites https://gta-san-andreas-apk.net
на этом сайте https://slon4-at.at/
company website https://gta-san-andreas-apk.net
browse around this website https://gta-san-andreas-apk.net/
this article https://v2-capcut-apk.com
site https://v2-capcut-apk.com
my sources https://gta-san-andreas-apk.net/
我的巴比伦恋人免费观看完整版shafa,内容精彩纷呈适合休闲放松时观看,点击即可观看我的巴比伦恋人免费观看完整版shafa。
Подробнее здесь https://slon4-at.at/
i thought about this https://gta-san-andreas-apk.net/
Следующая страница https://slon4-at.at/
нажмите https://slon4-at.at/
recommended you read https://v2-geometrydashapk.com/
взгляните на сайте здесь https://slon4-at.at/
сайт https://slon4-at.at
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
Для тех, кто ищет информацию по теме “Эффективные советы для начинающих резчиков”, есть отличная статья.
Вот, можете почитать:
https://fixora.ru/%d0%bf%d0%be%d0%bb%d0%b5%d0%b7%d0%bd%d1%8b%d0%b5-%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bd%d0%b0%d1%87%d0%b8%d0%bd%d0%b0%d1%8e%d1%89%d0%b8%d1%85-%d1%80%d0%b5%d0%b7%d1%87%d0%b8/
Надеемся, эти советы помогут вам в создании великолепных корзин из лозы.
Хотите блеснуть своим мастерством лозоплетения? Воспользуйтесь советами профессионалов!
Особенно понравился материал про Как выбрать идеальный набор для каллиграфии.
Вот, можете почитать:
https://fixora.ru/%d0%bd%d0%b0%d0%b1%d0%be%d1%80-%d0%b4%d0%bb%d1%8f-%d0%ba%d0%b0%d0%bb%d0%bb%d0%b8%d0%b3%d1%80%d0%b0%d1%84%d0%b8%d0%b8/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
посетить сайт https://slon4-at.at
hop over to this website https://gta-san-andreas-apk.net
узнать больше https://slon4-at.at/
click to read https://v2-geometrydashapk.com/
click now https://gta-san-andreas-apk.net
содержание https://slon4-at.at/
try this site https://gta-san-andreas-apk.net
check this https://v2-geometrydashapk.com/
найти это https://slon4-at.at/
i was reading this https://v2-capcut-apk.com
пояснения https://slon4-at.at
you can try this out https://gta-san-andreas-apk.net
Look At This https://v2-geometrydashapk.com
продолжить https://slon4-at.at
important source https://gta-san-andreas-apk.net/
нажмите, чтобы подробнее https://slon4-at.at
кликните сюда https://slon4-at.at/
опубликовано здесь https://slon4-at.at
you can try here https://gta-san-andreas-apk.net
sites https://v2-capcut-apk.com/
перейдите на этот сайт https://slon4-at.at
нажмите здесь https://slon4-at.at
пояснения https://slon4-at.at/
Your Domain Name https://v2-geometrydashapk.com/
this hyperlink https://v2-capcut-apk.com
https://betfun.cat/
Betfun se posiciona con fuerza en el escena local de apuestas como una plataforma integral que pertenece a Track Gaming Buenos Aires S.A., presentando una oferta que supera los 500 juegos y accion de mas de 30 deportes. Trabajando con pesos argentinos (ARS), la plataforma premia a los nuevos usuarios con un premio por sumarse de $15,000 ARS gratis al crear una cuenta, ademas de un match del 100% en el primer deposito para potenciar los primer credito.
browse around this web-site capcut apk
resource https://v2-capcut-apk.com/
see this here geometry dash apk
hop over to this site gta sa apk
see page https://v2-capcut-apk.com
Find Out More geometry dash apk
https://betwinner.cat/
Betwinner se ha establecido firmemente en el ambito local para 2026 como una opcion destacada en apuestas deportivas y casino online, destacando por su adaptacion al jugador local con transacciones en ARS y incentivos para nuevos usuarios que llegan hasta los $94.250 ARS.
site web https://v2-capcut-apk.com/
Website https://v2-capcut-apk.com
Read Full Article https://v2-geometrydashapk.com/
useful reference capcut apk download
see it here capcut mod apk
blog link https://v2-capcut-apk.com
review https://v2-geometrydashapk.com/
why not try these out gta san andreas apk download
this contact form cap cut apk
read review capcut mod apk
visit gta san andreas apk
go to my blog capcut apk
useful site geometry dash apk
try this site geometry dash apk download
“8 kisilik yemek masas? olcusu” konusu icin mukemmel bir kaynak var. Iste link: https://hobiprojesi.com/articles/sekiz-kisilik-masa-olculeri/
this website capcut premium apk
explanation gta san andreas apk download
Southeast Financial Nashville
131 Belle Forestt Cirr #210,
Nashville, TN 37221, United Ⴝtates
18669008949
NАDA RV weight ѵalue (https://padlet.com/)
Related Site https://v2-capcut-apk.com
websites https://gta-san-andreas-apk.net/
blog here https://gta-san-andreas-apk.net
click resources https://v2-geometrydashapk.com
try this site geometry dash apk download
click over here https://v2-capcut-apk.com
more tips here https://v2-capcut-apk.com/
check these guys out geometry dash apk download
find gta san andreas apk download
recommended you read capcut apk download
Recommended Site geometry dash apk
This Site https://gta-san-andreas-apk.net
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
Хочу выделить раздел про Эффективные советы для начинающих резчиков.
Ссылка ниже:
https://fixora.ru/%d0%bf%d0%be%d0%bb%d0%b5%d0%b7%d0%bd%d1%8b%d0%b5-%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bd%d0%b0%d1%87%d0%b8%d0%bd%d0%b0%d1%8e%d1%89%d0%b8%d1%85-%d1%80%d0%b5%d0%b7%d1%87%d0%b8/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
straight from the source https://v2-capcut-apk.com/
click here to investigate https://gta-san-andreas-apk.net
have a peek here capcut apk
check that geometry dash apk download
he has a good point gta sa apk
additional info gta san andreas apk download
see this site https://v2-capcut-apk.com
check this geometry dash apk
Kenvox
1701 E Edinger Ave
Santa Ana, СA 92705, Unitd Statеs
16572319025
next-gen contract manufacturing solutions
navigate to this website https://v2-capcut-apk.com/
Find Out More capcut mod apk
Read Full Report capcut apk download
click here now geometry dash apk
investigate this site capcut mod apk
view website gta sa apk
imp source https://v2-geometrydashapk.com
Get the facts geometry dash apk
about his gta sa apk
image source gta san andreas apk download
Full Report geometry dash apk
Discover More cap cut apk
site link https://v2-geometrydashapk.com/
check that https://gta-san-andreas-apk.net
узнать больше kraken онион
страница kraken сайт
этот сайт mega darknet
Продолжение мега даркнет
здесь мега ссылка
كما نغطي أنواع الألعاب المتوفرة مثل السلوتس وكازينو حقيقي والرهان الرياضي الافتراضي.
تحميل برنامج المراهنات 888 https://888starzegypt.com/apk/
ссылка на сайт kraken онион тор
узнать больше kraken ссылка зеркало
здесь kraken ссылка зеркало
каталог кракен onion сайт
يستكشف المقال أصول كازينوهات الإنترنت في مصر وكيف أصبحت 888starz ساحة رئيسية للألعاب.
888starz https://888starzegypt.com/
Modern Purair
416 Meridian Ɍd SE #14A, Calgary
AB T2Α 1X2, Canada
(403) 800-7254
filtration systemms (isiriaqhxx.raindrop.page)
нажмите здесь mega сайт
Смотреть здесь mgmarket6
каталог mega onion
содержание mega darknet
Узнать больше mgmarket6
посмотреть в этом разделе кракен onion
Добро пожаловать в мир плетения корзин из лозы, где каждый сможет найти советы от признанных мастеров!
Кстати, если вас интересует Материалы и технологии фигурной резки по дереву, загляните сюда.
Смотрите сами:
https://fixora.ru/%d0%bc%d0%b0%d1%82%d0%b5%d1%80%d0%b8%d0%b0%d0%bb%d1%8b-%d0%b4%d0%bb%d1%8f-%d1%84%d0%b8%d0%b3%d1%83%d1%80%d0%bd%d0%be%d0%b9-%d1%80%d0%b5%d0%b7%d0%ba%d0%b8-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2/
Надеемся, эти советы помогут вам в создании великолепных корзин из лозы.
Добро пожаловать в мир плетения корзин из лозы, где каждый сможет найти советы от признанных мастеров!
Хочу выделить раздел про Мастер-класс по плетению корзин для начинающих.
Смотрите сами:
https://fixora.ru/%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80-%d0%ba%d0%bb%d0%b0%d1%81%d1%81-%d0%bf%d0%be-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8e-%d0%ba%d0%be%d1%80%d0%b7%d0%b8%d0%bd-%d0%b4%d0%bb%d1%8f-%d0%bd%d0%b0/
Никогда не прекращайте учиться и совершенствоваться, ведь каждый день — это новый шаг в искусстве плетения!
сайт мега ссылка
узнать больше Здесь кракен onion
этот контент mega сайт
посетить веб-сайт kraken актуальные ссылки
кликните сюда актуальные зеркала kraken
Читать далее kraken онион тор
нажмите, чтобы подробнее mgmarket6
Источник мега даркнет
هذه العبارة تكميلية للفقرة الثانية وتغطي جانباً إضافياً.
888starz الموقع الرسمي https://888starzegypt.com/
يتحدث هذا المقال عن كازينو 888starz في مصر وكيف يعزز تجربة اللعب على الإنترنت للمقيمين في القاهرة ومختلف المحافظات.
استارز 888 https://888starzegypt.com/
узнать сайт kraken onion
казино леон
такой мега онион
هذه العبارة تمثل مدخلاً للفقرة الثانية في القسم الأول.
888starz https://888starzegypt.com/
Смотреть здесь mega darknet
смотреть здесь мега сайт
سنشرح إجراءات الامتثال وسياسات الخصوصية التي تضمن سلامة اللاعبين على 888starz.
starz888 https://888starzegypt.com/
узнать больше mgmarket6at
проверить сайт kraken ссылка на сайт
страница kraken сайт зеркала
узнать больше Здесь kraken актуальные ссылки
посетить веб-сайт mgmarket6at
узнать кракен онион тор
перейдите на этот сайт kraken актуальные ссылки
сюда kraken ссылка зеркало
опубликовано здесь mgmarket6
Подробнее kraken darknet market
Главная kraken onion ссылка
Продолжение kraken официальные ссылки
продолжить кракен ссылка kraken
Подробнее здесь мега сайт
опубликовано здесь мега ссылка
Подробнее здесь кракен онион
веб-сайте mega darknet
нажмите kraken darknet ссылка
нажмите, чтобы подробнее мега ссылка
Узнать больше kraken актуальные ссылки
нажмите здесь kraken онион
взгляните на сайте здесь kraken сайт
Перейти на сайт mgmarket6at
Всем привет! Прочитал статью про продвижение сайтов и развитие бизнеса в сети. Хороший обзор, охватывает основные направления: от SEO и контекстной рекламы до автоматизации и выхода на международные рынки. Автор пишет про системный подход и важность аналитики. Может быть полезно владельцам бизнеса и маркетологам. Вот ссылка: https://midships.ru/jeffektivnoe-prodvizhenie-sajtov-i-razvitie-biznesa-v-internete/
выберите ресурсы mega сайт
ссылка на сайт mega onion
страница kraken onion ссылка
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
Хочу выделить раздел про Создание сложных корзин: мастер-класс и советы.
Вот, делюсь ссылкой:
https://fixora.ru/%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80-%d0%ba%d0%bb%d0%b0%d1%81%d1%81-%d0%bf%d0%be-%d1%81%d0%be%d0%b7%d0%b4%d0%b0%d0%bd%d0%b8%d1%8e-%d1%81%d0%bb%d0%be%d0%b6%d0%bd%d1%8b%d1%85-%d0%ba%d0%be%d1%80%d0%b7/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
Bu arada, eger f?r?n ici temizligi konusuyla ilgileniyorsan?z, suraya bak?n. Suradan okuyabilirsiniz: https://kendifikirler.com/articles/firin-ici-yanik-temizligi/
посетить сайт kraken onion
смотреть здесь kraken ссылка зеркало
нажмите мега сайт
выберите ресурсы кракен онион
Смотреть здесь кракен ссылка onion
сюда kraken актуальные ссылки
Читать далее кракен onion сайт
подробнее mega darknet
ссылка на сайт kraken ссылка зеркало
нажмите здесь kraken сайт зеркала
посмотреть на этом сайте mega onion
click to find out more capcut premium apk
see this website gta sa apk
найти это мега сайт
выберите ресурсы kraken официальные ссылки
содержание кракен онион тор
this page geometry dash apk
посмотреть на этом сайте mega ссылка
Check Out Your URL capcut apk download
find more info geometry dash apk download
look here geometry dash apk
check out this site geometry dash apk download
go to this web-site geometry dash apk
a fantastic read geometry dash apk download
this hyperlink geometry dash apk
see capcut apk
другие мега сайт
special info capcut mod apk
Continued geometry dash apk download
Going Here geometry dash apk
browse around this site gta sa apk
перейти на сайт kraken маркетплейс зеркало
подробнее мега сайт
top article gta san andreas apk download
official website cap cut apk
index capcut mod apk
перейдите на этот сайт актуальные зеркала kraken
нажмите здесь мега даркнет
browse around this site gta san andreas apk
ссылка на сайт mgmarket6at
visit site gta san andreas apk download
веб-сайт mega ссылка
подробнее кракен онион
Перейти на сайт мега даркнет
Главная kraken ссылка зеркало
посетить веб-сайт кракен onion
Read More Here cap cut apk
check out this site geometry dash apk download
зайти на сайт kra ссылка
здесь mega darknet
Главная мега сайт
the original source capcut apk download
ссылка на сайт kraken сайт зеркала
hop over to this website capcut mod apk
This Site gta san andreas apk
this geometry dash apk download
find out this here capcut premium apk
кликните сюда кракен ссылка kraken
visit site gta san andreas apk
reference cap cut apk
содержание mgmarket6
her latest blog gta san andreas apk
Читать далее kraken официальные ссылки
https://ufc327odds.com/
The upcoming UFC 327 light heavyweight championship bout in Miami presents a classic pick’em for the gambling public, as former titleholder Jiri Prochazka (-142) and on-a-roll knockout specialist Carlos Ulberg (+120) gear up to battle for the vacant belt. The extremely close odds highlight how evenly matched these two striking specialists happen to be, creating a scenario where a wager on either man ultimately comes down to which dynamic approach you think will come out on top.
страница mega сайт
нажмите, чтобы подробнее kraken onion зеркала
веб-сайте мега сайт
нажмите, чтобы подробнее mega darknet
Всем привет! Рзучал тему развития бизнеса РІ интернете Рё наткнулся РЅР° полезную статью. Там РїСЂРѕ комплексное продвижение сайтов: SEO, контекст, контент-маркетинг, соцсети, аналитику. Есть блок РїСЂРѕ ошибки Рё РїСЂРѕ современные тренды — персонализация, РР, омниканальность. Рекомендую Рє прочтению: https://wikicom.ru/2025/12/jeffektivnoe-prodvizhenie-sajtov-i-razvitie-biznesa-v-internete/
в этом разделе mgmarket6
Источник mega darknet
посетить сайт mega onion
check my site geometry dash apk download
https://miamifightcard.com/
When it comes to MediaFightCard, the gambling markets showcase a notable dynamic with champions listed as the ‘dogs and opponents holding favorite status. In the marquee matchup for the available light heavyweight title, previous belt-holder Jiri Prochazka debuted as a modest -143 favorite over the ascending Carlos Ulberg, who enters as a +116 underdog even with his nine-fight winning streak.
узнать больше Здесь кракен онион тор
перенаправляется сюда кракен onion сайт
here gta sa apk
каталог мега онион
подробнее мега даркнет
you can find out more gta san andreas apk download
посмотреть в этом разделе mega ссылка
узнать больше mega сайт
check my site gta san andreas apk download
their website geometry dash apk
تمثل هذه السطور بداية الفقرة الثانية ضمن القسم الأول.
مراهنات 888 https://888starzegypt.com/
страница mgmarket6
More Help gta sa apk
нажмите здесь кракен даркнет
проверить сайт kraken зеркало рабочее
pop over to these guys gta san andreas apk download
this link geometry dash apk download
Click This Link gta sa apk
ссылка на сайт mgmarket6
Добро пожаловать в мир плетения корзин из лозы, где каждый сможет найти советы от признанных мастеров!
Кстати, если вас интересует Лучшие практики безопасности при работе с резьбой, загляните сюда.
Смотрите сами:
https://fixora.ru/%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%bf%d0%be-%d0%b1%d0%b5%d0%b7%d0%be%d0%bf%d0%b0%d1%81%d0%bd%d0%be%d1%81%d1%82%d0%b8-%d0%bf%d1%80%d0%b8-%d1%80%d0%b0%d0%b1%d0%be%d1%82%d0%b5-%d1%81-%d1%80%d0%b5/
Надеемся, эти советы помогут вам в создании великолепных корзин из лозы.
Discover More Here gta sa apk
каталог mgmarket6
узнать больше Здесь mgmarket6at
“tavan rulosu ile duvar rulosu aras?ndaki fark” konusu icin burada harika bilgiler var. Link burada: https://fikirdronu.com/articles/tavan-boyasi-duvar-boyasi-karistirilir-mi/
Ayr?ca, eger elbisedeki boya nas?l c?kar konusuyla ilgileniyorsan?z, suraya bak?n. Iste link: https://kendimacera.com/articles/kiyafetlerde-boya-lekesi-cikarma-yontemleri/
читать kraken зеркало
go to these guys geometry dash apk download
Смотреть здесь мега даркнет
пояснения mega darknet
Продолжение kraken ссылка зеркало
взгляните на сайте здесь мега сайт
продолжить mega onion
check over here geometry dash apk
веб-сайт mega сайт
check this gta san andreas apk download
в этом разделе kraken onion ссылка
anonymous geometry dash apk download
pop over here cap cut apk
пояснения kraken зеркало
узнать больше кракен onion
YOURURL.com capcut apk download
browse around here gta sa apk
visit this web-site gta sa apk
Источник кракен ссылка
great site capcut apk
такой mega darknet
нажмите mega darknet
ссылка на сайт мега онион
Перейти на сайт мега ссылка
read geometry dash apk
Read More Here gta san andreas apk download
на этом сайте мега онион
hop over to this website capcut apk
check my blog capcut premium apk
Full Report cap cut apk
читать мега онион
подробнее здесь kraken onion
подробнее здесь kraken onion ссылка
посмотреть в этом разделе kraken онион
Пробовал накрутку пару лет назад через дешёвые сервисы — толку не было, только деньги сжёг. Статья помогла понять, почему. Во-первых, сайт тогда был технически не готов (глубоко в выдаче). Во-вторых, использовал дешёвые прокси и сгенерированные отпечатки. Сейчас, почитав этот гайд, вижу системный подход: аудит сайта, правильный сбор семантики, плавный старт. Оставлю ссылку здесь, буду перечитывать перед запуском: https://partnerkin.com/tribuna/blog-vitalivivdenko/nakrutka-pf-v-yandekse-polnoe- . Много практических деталей.
هذه الجملة الثانية من الفقرة الرابعة في القسم الأول.
star888 https://888starzegypt.com/
In summary, the true fortune casino operating in the UK combines solid licensing, diverse games, rewarding incentives, smooth payments, and reliable support into a trustworthy gaming platform.
true fortune 50 free spins no deposit true fortune 50 free spins no deposit.
Moreover, attractive bonuses and a rewarding rewards program add value for UK players, whether new or recurring.
true fortune casino promo codes https://true-fortune-casino.uk/#do-no-deposit-promo-codes-exist-for-existing-true-fortune-players/
этот сайт mega darknet
هذه العبارة تتابع الملخص وتبرز نتائج النقاش.
ستار 888 للمراهنات https://888starzegypt.com/
mese ve ceviz rengi hakk?ndaki yaz?y? cok sevdim. Kendiniz gorun: https://kendihobim.com/articles/ceviz-mese-rengi-doganin-estetik-cesitliligi/
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
Зацепил раздел про Как выбрать идеальные ножи для резьбы по дереву.
Вот, можете почитать:
https://fixora.ru/%d0%ba%d0%b0%d0%ba-%d0%b2%d1%8b%d0%b1%d1%80%d0%b0%d1%82%d1%8c-%d0%bd%d0%be%d0%b6%d0%b8-%d0%b4%d0%bb%d1%8f-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
In the United Kingdom, the true fortune casino stands out as a premier venue, attracting players with its extensive game library and trustworthy withdrawals.
true fortune casino no deposit promo codes for existing players https://true-fortune-casino.uk/
Дом из клееного бруса в Санкт-Петербурге — проекты и цены под ключ
Песочница — простой, но очень важный элемент детской площадки. Игры с песком развивают мелкую моторику и фантазию у малышей. Лучше брать песочницу с крышкой, чтобы защитить от дождя и кошек.
في الختام يظل 888starz منصة رائدة لمن يريد تجربة قمار موثوقة في مصر.
تحميل برنامج المراهنات 888 تحميل برنامج المراهنات 888.
هذه الجملة الأولى من الفقرة الثالثة في القسم الأول.
تحميل 888starz تحميل 888starz.
In conclusion, true fortune casino in the United Kingdom blends licensing, game variety, promotions, payments, and support to create a trustworthy entertainment hub.
true fortune casino free spins https://true-fortune-casino.uk/#50-free-chip-100-bonus-code-or-250-free-chip-what-is-actually-available-now/
раменбет бонус
здесь кракен онион зеркало
Продолжение mega onion
Источник kraken актуальные ссылки
هذا التقرير يسلط الضوء على كازينو 888starz بمصر وتأثيره على مشهد الألعاب الإلكترونية المحلي.
ستار 888 للمراهنات https://888starzegypt.com/
With ongoing updates and a commitment to responsible gaming, true fortune casino continues to evolve in the United Kingdom market.
true fortune casino no deposit free chip https://true-fortune-casino.uk/#50-free-chip-100-bonus-code-or-250-free-chip-what-is-actually-available-now/
https://caliente.cat/
Caliente Casino se posiciona como una alternativa destacada en el mercado mexicano, proporcionando una plataforma integral que integra pronosticos deportivos y juegos de casino con una variada oferta de encuentros y juegos. De este modo, Caliente Casino se establece como una alternativa solida para los jugadores que deseen diversion con multiples opciones y condiciones competitivas en una misma plataforma.
узнать больше mega onion
In summary, the true fortune casino operating in the UK combines solid licensing, diverse games, rewarding incentives, smooth payments, and reliable support into a trustworthy gaming platform.
true fortune casino free chip no deposit https://true-fortune-casino.uk/#do-no-deposit-promo-codes-exist-for-existing-true-fortune-players/
пояснения mega onion
ومن ثم نسلط الضوء على برامج المكافآت وطرق الإيداع والسحب المعتمدة محلياً.
888 https://888starzegypt.com/
يستكشف المقال أصول كازينوهات الإنترنت في مصر وكيف أصبحت 888starz ساحة رئيسية للألعاب.
888starz https://888starzegypt.com/
هذه الجملة الأولى من الفقرة الثانية في القسم الأول.
888 https://888starzegypt.com/
kahve kopugu duvar boyas? hakk?ndaki makaleyi tavsiye ederim. Iste link: https://evhobisi.com/articles/kahve-duvar-boyasi-ile-evinizi-yenileyin/
هذه العبارة تفتح باب النقاش حول جانب مختلف من الموضوع.
8888 starz https://888starzegypt.com/
Second, a broad catalog of slots, table games, and live dealer options provides variety that keeps sessions engaging for everyone.
true fortune casino $50 free chip code https://true-fortune-casino.uk/
кликните сюда mega darknet
Подробнее здесь kraken актуальные ссылки
узнать кракен онион зеркало
Коллеги, кто глубоко копает тему, обратите внимание на раздел про инструменты. Автор подробно сравнивает облачные сервисы и самостоятельную накрутку через BAS/Monstro. Очень правильно написано про необходимость мобильных прокси, реальных фингерпринтов и нагуленных кук — это 90% успеха, чтобы не получить роботность в Метрике. Цены на самостоятельную накрутку (от 30к в месяц на инфраструктуру) тоже реалистичные. Статья в закладки: https://partnerkin.com/tribuna/blog-vitalivivdenko/nakrutka-pf-v-yandekse-polnoe- . Полезно и для новичков, и для профи.
The platform’s focus on security, fairness, and user happiness matches the standards expected by UK authorities and players alike.
true fortune casino promo codes https://true-fortune-casino.uk/
https://codere.cat/
Codere Mexico es un sitio de juegos de casino por internet que opera con pleno cumplimiento normativo bajo licencia de la SEGOB , brindando a los usuarios de Mexico un entorno de juego seguro y fiable donde todos los depositos y retiros se operan totalmente en MXN, la moneda local via SPEI, el sistema de pagos ampliamente utilizado en Mexico.
https://juegaenlinea.cat/
El sitio Juegaenlinea se establece en 2026 como una plataforma lider en Colombia, entregando un entorno confiable y completo para casino online y apuestas deportivas bajo licencia otorgada por la Junta de Control de Juegos de Curazao.
Pensada principalmente enfocada en el publico latinoamericano, esta plataforma permite operar en pesos de Colombia y ofrece una extensa oferta de entretenimiento respaldada por mas de 35 desarrolladores de software reconocidos mundialmente.
gomlek nas?l utulenir hakk?ndaki yaz?y? tavsiye ederim. Kendiniz gorun: https://hobiprojesi.com/articles/kolay-gomlek-utuleme-yontemleri/
muz kabugu suyu hangi ciceklere verilir hakk?ndaki makaleyi tavsiye ederim. Kendiniz gorun: https://hobiprojesi.com/articles/ciceklere-muz-kabugu-suyu-uygulamasi/
подробнее mgmarket6at
The site’s emphasis on safety, fairness, and user satisfaction aligns well with UK regulatory expectations and player needs.
truefortune casino no deposit bonus https://true-fortune-casino.uk/#brand-footprint-and-domain-check-true-fortunecom-truefortune-casinouk-truefortunecasinocom-truefortunecouk/
هذه العبارة تتابع الشرح وتضيف معلومات جديدة.
تحميل برنامج المراهنات 888 https://888starzegypt.com/apk/
Площадка на даче — это место, где вся семья проводит время вместе. Родители отдыхают рядом, пока дети играют в безопасной среде. Лучшие воспоминания о детстве создаются именно так.
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
Особенно понравился раздел про Эксклюзивные техники резьбы по дереву: советы и тренды 2024.
Вот, можете почитать:
https://fixora.ru/%d1%80%d0%b5%d0%b4%d0%ba%d0%b8%d0%b5-%d1%82%d0%b5%d1%85%d0%bd%d0%b8%d0%ba%d0%b8-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Надеемся, эти советы помогут вам в создании великолепных корзин из лозы.
boyun kas? gelistirme hakk?ndaki yaz?y? cok sevdim. Kendiniz gorun: https://dinamizsport.com/articles/boyun-guclendirme-egzersizleri-saglikli-boyun/
Bu arada soyleyeyim, eger kovada donmus boya nas?l cozulur konusuyla ilgileniyorsan?z, suraya bak?n. Link burada: https://fikirdronu.com/articles/donmus-boya-nasil-cozulur/
ولا ننسى عرض ألعاب متنوع يشمل ماكينات السلوتين والكرات الحقيقية وقاعات الرهان الرقمي.
Across the United Kingdom, true fortune casino has become a leading hub for gamers seeking diverse titles and consistent prize distributions.
true fortune casino free chip no deposit https://true-fortune-casino.uk/#how-do-you-claim-a-true-fortune-no-deposit-bonus-code-in-2026/
هذه العبارة تختتم فقرة القسم الأول وتلخص فكرة.
star 888 bet https://888starzegypt.com/
To begin with, true fortune casino is licensed by a respected authority, ensuring fair conduct and safety for UK players.
truefortune no deposit bonus truefortune no deposit bonus.
هذا التقرير يسلط الضوء على كازينو 888starz بمصر وتأثيره على مشهد الألعاب الإلكترونية المحلي.
تحميل برنامج المراهنات 888 https://888starzegypt.com/apk/
Our site the pass app reviews
find android pass app
try this site the pass app
найти это https://slon56.com/
нажмите https://slon4u.com/
другие https://slon58.com
check over here pass app login
best site pass wallet
check my reference android pass app
my latest blog post the pass app
go to my blog pass app login
check this site out android pass app
website here pass app login
find here pass wallet
Read Full Report wallet pass app
Hello i want share something with you all. I found this site 777bet and is very good for me. The interface is easy to use and customer service is very helpful when i have question.
Всем привет! Рзучал тему развития бизнеса через интернет Рё нашел хороший РѕР±Р·РѕСЂ. Статья называется “Рффективное продвижение сайтов Рё развитие бизнеса РІ интернете”. Там РїРѕРґСЂРѕР±РЅРѕ разобраны основные каналы: SEO, контекст, соцсети, аналитика. Особенно полезно для тех, кто хочет системно подойти Рє РІРѕРїСЂРѕСЃСѓ, Р° РЅРµ работать хаотично. Р’РѕС‚ ссылка, если РєРѕРјСѓ интересно: http://harizma86.ru/jeffektivnoe-prodvizhenie-sajtov-i-razvitie-biznesa-v-internete/
this content pass wallet
More about the author pass app download
evde kozalak bulundurman?n faydalar? hakk?ndaki bolumu tavsiye ederim. Kendiniz gorun: https://kendimacera.com/articles/bitkiler-hakkinda-ilginc-bilgiler/
site web pass wallet app for android
Get More Information pass app login
Следующая страница https://slon4u.com
можно проверить ЗДЕСЬ https://slon4u.com/
تمثل هذه الجملة بداية فقرة رابعة في القسم الأول.
ستارز 888 https://888starzegypt.com/
смотреть здесь https://slon56.com
нажмите, чтобы подробнее https://slon4u.com
i was reading this pass app download
Moreover, the support team provides prompt assistance through multiple channels, including live chat and emails.
true fortune casino promo codes https://true-fortune-casino.uk/#how-do-you-claim-a-true-fortune-no-deposit-bonus-code-in-2026/
можно проверить ЗДЕСЬ https://17slon.net/
веб-сайте https://slon58.com
هذه العبارة ختاماً للنقاش في القسم الأول وتقدم توصيات.
ستارز 888 https://888starzegypt.com/
page the pass app
click for info the pass app reviews
more helpful hints the pass app
перейти на сайт https://slonline.net/
ссылка на сайт https://slon58.com
The platform’s focus on security, fairness, and user happiness matches the standards expected by UK authorities and players alike.
true fortune free bonus true fortune free bonus.
Смотреть здесь https://17slon.net
check my site pass app download
продолжить https://slon56.com/
Fourth, dependable payment methods and clear withdrawal timelines help UK players manage their funds with confidence.
true fortune no deposit https://true-fortune-casino.uk/
перейдите на этот сайт https://17slon.net/
hop over to this web-site the pass app
Visit Your URL the pass app reviews
click here for info android pass app
сайт https://slon56.com
ссылка на сайт https://slonline.net
Going Here the pass app
Смотреть здесь https://slonline.net/
Continue Reading android pass app
узнать больше Здесь https://slon4u.com/
visit our website pass app
In summary, the true fortune casino operating in the UK combines solid licensing, diverse games, rewarding incentives, smooth payments, and reliable support into a trustworthy gaming platform.
true fortune 50 free spins promo code https://true-fortune-casino.uk/#is-true-fortune-casino-legal-for-players-in-london-and-the-uk/
With ongoing updates and a commitment to responsible gaming, true fortune casino continues to evolve in the United Kingdom market.
true fortune casino free spins no deposit https://true-fortune-casino.uk/#brand-footprint-and-domain-check-true-fortunecom-truefortune-casinouk-truefortunecasinocom-truefortunecouk/
Думаю заказать поведенческие факторы и изучаю рынок. Статья помогла понять, какие вопросы задавать подрядчикам и на что обращать внимание в отчётах.
узнать https://slon4u.com/
смотреть здесь https://slon58.com
anchor android pass app
проверить сайт https://slon56.com
на этом сайте https://slon56.com
Перейти на сайт https://slon4u.com
такой https://slonline.net
узнать больше https://slon56.com
этот сайт https://slon4u.com
проверить сайт https://slon4u.com
посмотреть на этом сайте https://slon4u.com/
страница https://17slon.net
перейдите на этот сайт https://17slon.net
подробнее https://slon4u.com
перенаправляется сюда https://slon4u.com/
содержание https://slon58.com
посмотреть на этом сайте https://17slon.net
Следующая страница https://slonline.net
проверить сайт https://slon4u.com/
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
Между прочим, если вас интересует Как выбрать идеальный набор отверток для дома и работы, посмотрите сюда.
Ссылка ниже:
https://fixora.ru/%d0%bd%d0%b0%d0%b1%d0%be%d1%80-%d0%be%d1%82%d0%b2%d0%b5%d1%80%d1%82%d0%be%d0%ba/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
“mutfak dolab? yagl? boya ile boyan?r m?” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Iste link: https://hobiyapma.com/articles/yagli-boya-mutfak-dolabi-boyanir-mi/
Добро пожаловать в мир плетения корзин из лозы, где каждый сможет найти советы от признанных мастеров!
Для тех, кто ищет информацию по теме “Как выбрать материалы для резных фигур: древесина, камень, металл и полимеры”, там просто кладезь информации.
Вот, можете почитать:
https://fixora.ru/%d0%bc%d0%b0%d1%82%d0%b5%d1%80%d0%b8%d0%b0%d0%bb%d1%8b-%d0%b4%d0%bb%d1%8f-%d1%81%d0%be%d0%b7%d0%b4%d0%b0%d0%bd%d0%b8%d1%8f-%d1%80%d0%b5%d0%b7%d0%bd%d1%8b%d1%85-%d1%84%d0%b8%d0%b3%d1%83%d1%80/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
Всем привет! Делюсь найденным материалом. Статья про продвижение сайтов и развитие бизнеса в интернете. Хороший базовый обзор с акцентом на комплексный подход: SEO, контекст, SMM, аналитика. Особенно порадовал раздел про частые ошибки — полезно для самопроверки. Вот ссылка для тех, кому нужно структурировать знания: https://yana-troyanova.ru/stati/jeffektivnoe-prodvizhenie-sajtov-i-razvitie-biznesa-v-internete/
найти это https://slonline.net/
сюда https://slonline.net/
Смотреть здесь https://slon56.com/
взгляните на сайте здесь https://slon56.com/
пояснения https://slon4u.com
проверить сайт https://slon4u.com
подробнее здесь https://slon56.com
этот контент https://slonline.net/
читать https://17slon.net
продолжить https://slon58.com
на этом сайте https://slon56.com/
зайти на сайт https://17slon.net
Смотреть здесь https://slonline.net
узнать больше https://slonline.net/
содержание https://slon58.com/
ссылка на сайт https://17slon.net
Дом из клееного бруса — инвестиция в комфорт и качество жизни
посмотреть в этом разделе https://slon4u.com/
Продолжение https://slon4u.com
сайт https://slonline.net/
веб-сайт https://17slon.net/
сюда https://slon4u.com/
Читать далее https://slon56.com/
смотреть здесь https://slonline.net
веб-сайт https://slon58.com
каталог https://17slon.net
посетить веб-сайт https://slon58.com
этот контент https://slon4u.com/
можно проверить ЗДЕСЬ https://slon58.com
нажмите здесь https://slon58.com
Подробнее https://slon58.com
Продолжение https://slon4u.com/
интернет https://17slon.net
нажмите здесь https://slon58.com
такой https://slon56.com
кликните сюда https://slon4u.com
выберите ресурсы https://slon4u.com
посмотреть на этом сайте https://slon58.com/
этот контент https://slonline.net
Подробнее здесь https://slonline.net/
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Кстати, если вас интересует Эффективные советы для начинающих резчиков, загляните сюда.
Ссылка ниже:
https://fixora.ru/%d0%bf%d0%be%d0%bb%d0%b5%d0%b7%d0%bd%d1%8b%d0%b5-%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bd%d0%b0%d1%87%d0%b8%d0%bd%d0%b0%d1%8e%d1%89%d0%b8%d1%85-%d1%80%d0%b5%d0%b7%d1%87%d0%b8/
Никогда не прекращайте учиться и совершенствоваться, ведь каждый день — это новый шаг в искусстве плетения!
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Кстати, если вас интересует Преимущества и выбор керамических ножей в 2024 году, загляните сюда.
Смотрите сами:
https://fixora.ru/%d0%ba%d0%b5%d1%80%d0%b0%d0%bc%d0%b8%d1%87%d0%b5%d1%81%d0%ba%d0%b8%d0%b9-%d0%bd%d0%be%d0%b6/
Удачи вам в плетении и вдохновения от наших мастеров!
“haftada kac gun spora gidilmeli” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Link burada: https://atletikgiyim.com/articles/spor-haftada-kac-gun-yapilmali/
найти это https://slon4u.com
проверить сайт https://slonline.net
посетить веб-сайт https://slon4u.com/
подробнее https://slonline.net/
узнать больше https://17slon.net
узнать больше https://slon56.com/
кликните сюда https://17slon.net/
посмотреть на этом сайте https://slon58.com
содержание https://slon4u.com
посетить веб-сайт https://slon56.com/
узнать больше Здесь https://17slon.net
сюда https://slon56.com
можно проверить ЗДЕСЬ https://slonline.net/
сайт https://slon4u.com
веб-сайте https://slon58.com/
найти это https://17slon.net
ссылка на сайт https://slon56.com/
посмотреть на этом сайте https://slon4u.com
Смотреть здесь https://17slon.net/
Подробнее https://slonline.net
зайти на сайт https://slon58.com/
на этом сайте https://17slon.net/
выберите ресурсы https://slon56.com
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
Между прочим, если вас интересует Как выбрать материалы для резных фигур: древесина, камень, металл и полимеры, посмотрите сюда.
Вот, можете почитать:
https://fixora.ru/%d0%bc%d0%b0%d1%82%d0%b5%d1%80%d0%b8%d0%b0%d0%bb%d1%8b-%d0%b4%d0%bb%d1%8f-%d1%81%d0%be%d0%b7%d0%b4%d0%b0%d0%bd%d0%b8%d1%8f-%d1%80%d0%b5%d0%b7%d0%bd%d1%8b%d1%85-%d1%84%d0%b8%d0%b3%d1%83%d1%80/
Удачи вам в плетении и вдохновения от наших мастеров!
на этом сайте https://slon4u.com
mutfak esyalar? listesi hakk?ndaki bolumu cok sevdim. Iste link: https://kendihobim.com/articles/mutfak-esyasi-ceyiz-listesi-rehber/
Главная https://17slon.net/
Думаю заказать пф и изучаю матчасть. Статья помогла понять, что накрутка работает только на подготовленных сайтах. Проверил свой по чек-листу — есть над чем работать.
содержание https://17slon.net
сайт https://17slon.net/
Источник https://17slon.net
блэкджек онлайн на деньги с выводом денег казино
Перейти на сайт https://slon56.com
Задумываетесь над плетением корзин? Узнайте, что советуют опытные мастера!
Между прочим, если вас интересует Как выбрать идеальные ножи для резьбы по дереву, загляните сюда.
Вот, делюсь ссылкой:
https://fixora.ru/%d0%ba%d0%b0%d0%ba-%d0%b2%d1%8b%d0%b1%d1%80%d0%b0%d1%82%d1%8c-%d0%bd%d0%be%d0%b6%d0%b8-%d0%b4%d0%bb%d1%8f-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Удачи вам в плетении и вдохновения от наших мастеров!
продолжить Как узнать кто посещал вк
Смотреть здесь Узнать паспортные данные человека
Смотреть здесь Гости вк
Главная Узнать посетителей вк
пояснения Геолокация по номеру телефона
Подробнее Посетители вк
другие Посетители вк профиля
нажмите, чтобы подробнее Взлом тг
такой Как узнать кто посещал страничку вк
Читать далее Как узнать кто посещал страничку вк
Перейти на сайт Статистика посетители вк
здесь Перехват сообщений вк
зайти на сайт Чужие переписки тг
взгляните на сайте здесь Как узнать место человека по телефону
такой Как узнать кто посещал страничку вк
Смотреть здесь Узнать замужем ли
узнать больше Взлом тг
подробнее здесь Гости вк
Смотреть здесь Получить все смс абонента
веб-сайт перехват смс
страница Доступ к чужому вк
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Зацепил раздел про Секреты и вдохновение мастера резьбы по дереву.
Смотрите сами:
https://fixora.ru/%d0%b8%d0%bd%d1%82%d0%b5%d1%80%d0%b2%d1%8c%d1%8e-%d1%81-%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80%d0%be%d0%bc-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
здесь Как узнать женат ли
нажмите Посетители вк
продолжить Как узнать кто посещал вк
страница Перехват сообщений вк
ссылка на сайт Как узнать кто посещал страничку вк
Продолжение Статистика посетители вк
What stood out was the idea of blending services—it shows how integration makes tools more powerful. That same sense of integration reminds me of Megawagi, where features work together to create a smooth experience.
The section about user-generated mashups was notable, especially the detail about personalization. It made me curious about how customization shapes engagement. That curiosity is similar to exploring the Megawagi Official Website, where updates highlight how personalization improves user satisfaction.
здесь Гости вк
The mention of challenges in mashups was meaningful, since it shows how guidance helps overcome complexity. Observing that reminded me of Megawagi Customer Support, where attentive service ensures users feel supported when facing difficulties.
кликните сюда Как взломать вк
Перейти на сайт Чужие переписки тг
Перейти на сайт Кто посещал мою страничку
нажмите, чтобы подробнее пробив геолокации человека
опубликовано здесь Узнать посетителей вк
можно проверить ЗДЕСЬ Статистика посетители вк
интернет Как узнать кто посещал вк
содержание Посетители вк
такой Доступ в чужому аккаунту в тг
ссылка на сайт Посетители вк профиля
Перейти на сайт Доступ в чужому аккаунту в тг
можно проверить ЗДЕСЬ местонахождение человека по номеру телефона
этот контент Перезват сообщений в тг
страница Узнать паспортные данные человека
Смотреть здесь Статистика посетители вк
посетить сайт Статистика посетители вк
сайт Кто посещал мою страничку
Смотреть здесь Геолокация по номеру телефона
сайт Местонахождение человека по номеру телефона
посетить веб-сайт Узнать ФИО по номеру телефона
подробнее Узнать замужем ли
подробнее здесь Перехват сообщений вк
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Хочу выделить материал про Преимущества и выбор керамических ножей в 2024 году.
Ссылка ниже:
https://fixora.ru/%d0%ba%d0%b5%d1%80%d0%b0%d0%bc%d0%b8%d1%87%d0%b5%d1%81%d0%ba%d0%b8%d0%b9-%d0%bd%d0%be%d0%b6/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
читать Получить все смс абонента
этот контент Как узнать кто посещал вк
https://playcet.cat/
Playcet se presenta como un sitio web de apuestas y casino online administrada por CET, una firma nacional con un largo recorrido en casinos fisicos de Cordoba, lo que le otorga un aval autentico y seguro para el ano 2026.
Подробнее здесь Пробив геолокации по номеру телефона
ссылка на сайт Статистика посетители вк
сайт Посетители вк
https://playdoit.cat/
Playdoit Casino se presenta como un actual casa de apuestas online y tambien centro de apuestas deportivas pensado unicamente para la audiencia de Mexico, el cual funciona de forma legal y ofrece una experiencia completa ya sea por medio del movil como desde el ordenador.
этот сайт Пробив геолокации по номеру телефона
посетить веб-сайт Взлом вк
этот сайт Посетители вк
Узнать больше местонахождение человека по номеру телефона
интернет Гости странички вк
посетить веб-сайт Посетители вк профиля
выберите ресурсы Как узнать кто посещал страничку вк
нажмите здесь Взлом вк сообщений
другие Гости вк
опубликовано здесь Узнать посетителей вк
рулетка фортуны
Узнать больше Взлом вк
перейдите на этот сайт Как узнать кто посещал вк
Хотите блеснуть своим мастерством лозоплетения? Воспользуйтесь советами профессионалов!
Между прочим, если вас интересует Как выбрать идеальный набор отверток для дома и работы, загляните сюда.
Ссылка ниже:
https://fixora.ru/%d0%bd%d0%b0%d0%b1%d0%be%d1%80-%d0%be%d1%82%d0%b2%d0%b5%d1%80%d1%82%d0%be%d0%ba/
Удачи вам в плетении и вдохновения от наших мастеров!
“gri renk olusumu” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Iste link: https://fikirdronu.com/articles/gri-renk-hangi-renklerle-olusur/
содержание Как узнать кто посещал страничку вк
другие Посетители вк профиля
этот контент Узнать посетителей вк
Следующая страница Как узнать кто посещал вк
интернет Посетители вк
подробнее Кто посещал мою страничку
Смотреть здесь перехват смс
взгляните на сайте здесь Посетители вк профиля
узнать больше Здесь Статистика посетители вк
проверить сайт Кто посещал мою страничку
нажмите здесь Статистика посетители вк
Коллеги, кто ищет базу по SEO, гляньте этот материал. Там подробно расписано, из чего состоит поисковая оптимизация, какие бывают факторы ранжирования и почему без этого бизнесу в интернете сложно. Почитайте: https://art-instyle.ru/stati/seo-prodvizhenie-sajta-chto-jeto-takoe-i-zachem-nuzhno/
Задумываетесь над плетением корзин? Узнайте, что советуют опытные мастера!
Хочу выделить раздел про Советы мастеров по плетению корзин из лозы.
Ссылка ниже:
https://fixora.ru/%d0%b8%d0%bd%d1%81%d1%82%d1%80%d1%83%d0%bc%d0%b5%d0%bd%d1%82%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%ba%d0%be%d1%80%d0%b7%d0%b8%d0%bd-%d0%b8%d0%b7-%d0%bb%d0%be/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
profesyonel gumus parlatma hakk?ndaki makaleyi tavsiye ederim. Suradan okuyabilirsiniz: https://kendihobim.com/articles/gumus-yuzukleri-parlatma-yontemleri/
Наткнулся на интересный материал про SEO — там его называют искусством и наукой видимости. Автор рассказывает про техническую оптимизацию, контент и линкбилдинг. Есть мысли про будущие тренды. Рекомендую: https://loveloveme.ru/seo-prodvizhenie-sajta-iskusstvo-i-nauka-vidimosti-v-cifrovom-mire/
I wanted to share my experience with ipl live. I have been using the site for a few weeks now and I must say it exceeded my expectations. The interface is well-designed and I would suggest giving it a try.
https://wplay.cat/
Nos referimos a un sitio de apuestas que se rige por los mayores estandares de proteccion y normativa , brindando a los usuarios una vivencia de juego segura y plenamente regulada.
Con una gran diversidad de juegos que comprenden maquinas tragamonedas, casino en vivo y modalidades de pronostico, el sitio se caracteriza por su firme apuesta por la honestidad y el consumo consciente.
https://strendus.cat/
Strendus se posiciona en 2026 como el sitio de apuestas y casino en linea totalmente nacional con mayor reputacion, bajo la supervision de la Secretaria de Gobernacion.
https://rushbet.cat/
Rushbet en Colombia se consolida durante 2026 como un operador de juego online seguro y completo, bajo el amparo de la licencia oficial de Coljuegos, lo que garantiza seguridad juridica y cumplimiento para los jugadores en el pais.
Bu arada soyleyeyim, eger kot kokusu nas?l gecer konusuyla ilgileniyorsan?z, suraya bak?n. Iste link: https://hobiprojesi.com/articles/kot-kokusu-nasil-giderilir/
Hello i want share about 777bet because is very good for me, the platform very easy to use and the support team is very helpfull when i have questions, i think is best choice for peoples who want something reliable
a fantastic read paycor login
So my friend told me about free rummy online card game last week and I figured why not give it a shot right, and like it was actually way better then I expected honestly, the rules are straightforward, games dont take forever, and i found myself playing like 5 games in a row which never happends to me usually.
helpful site paycor employee login
additional resources paycor login
Visit Your URL paycor employer login
her response paycor login
see post paycor.com login
Great post! I really enjoyed reading this article — it’s clear, informative, and well written. I appreciate the effort you put into creating valuable content. Keep up the good work!
look at here now paycor login
tahta kas?k temizligi hakk?ndaki makaleyi cok sevdim. Link burada: https://evhobileri.com/articles/tahta-kasik-temizligi-ipuclari/
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Для тех, кто ищет информацию по теме “Как выбрать идеальные ножи для резьбы по дереву”, нашел много полезного.
Ссылка ниже:
https://fixora.ru/%d0%ba%d0%b0%d0%ba-%d0%b2%d1%8b%d0%b1%d1%80%d0%b0%d1%82%d1%8c-%d0%bd%d0%be%d0%b6%d0%b8-%d0%b4%d0%bb%d1%8f-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
Коллеги, кто работает с подрядчиками по SMM, обратите внимание на этот материал. Там есть чек-лист по выбору агентства и разбор того, как должна выглядеть прозрачная отчетность. Очень практично: https://sksensation.ru/smm-prodvizhenie-v/
look at more info paycor login
visit this website paycor login
This article provided exactly what I was looking for. Thank you for the great insight!
find more info paycor login
read the article paycor.com login
you can try these out paycor login
check that paycor login
internet paycor login
click to read paycor login
like it paycor.com login
read the full info here paycor employer login
use this link paycor.com login
try these out paycor login
you could try here paycor employer login
a fantastic read paycor login
Really appreciate your effort in creating valuable content. Looking forward to more posts like this!
You did a fantastic job explaining this topic. I’ll be sharing this with my friends.
i loved this paycor login
check my blog paycor login
useful content paycor login
additional resources paycor employer login
look at these guys paycor login
official website paycor login
a knockout post paycor login
Read Full Report paycor login
you can look here paycor login
you can try these out paycor login
why not try this out paycor login
go to this website paycor login
article source paycor login
article source paycor login
go to my blog paycor login
blog here paycor login
reference paycor login
important site paycor login
click here to investigate paycor login
visit homepage paycor employer login
webpage paycor employer login
this content paycor login
redirected here paycor login
https://zamba.cat/
Zamba se afianza para el ano 2026 como un operador lider dentro del pais, trabajando con total legalidad con licencia otorgada por Coljuegos y brindando un servicio integral que abarca desde pronosticos deportivos en disciplinas convencionales y competencias de videojuegos hasta un casino online con estudios de renombre internacional como NetEnt y Playtech.
https://yajuego.cat/
YaJuego se posiciona en 2026 como una opcion preferente en el pais , brindando una completa oferta de casino online y apuestas deportivas bajo la estricta regulacion de Coljuegos.
over at this website paycor employer login
additional info paycor login
find out paycor login
go now paycor login
click now paycor login
here are the findings paycor login
moved here paycor login
visit here paycor login
his explanation paycor login
Visit Your URL paycor login
Нашёл материал, где подробно разбирается, как строить SMM-стратегию с нуля: от аудита и анализа аудитории до запуска рекламных кампаний и оптимизации. Есть раздел про контент-план и работу с UGC. Рекомендую: https://foto-videomontaz.ru/smm-prodvizhenie-v-soczialnyh-setyah-princzipy-instrumenty-i-pokazateli-effektivnosti/
click this over here now paycor login
useful reference paycor login
official site paycor login
get redirected here paycor login
he said paycor login
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
Хочу выделить материал про История и эволюция плетения уникальных корзин.
Смотрите сами:
https://fixora.ru/%d0%b8%d1%81%d1%82%d0%be%d1%80%d0%b8%d1%8f-%d1%81%d0%be%d0%b7%d0%b4%d0%b0%d0%bd%d0%b8%d1%8f-%d1%83%d0%bd%d0%b8%d0%ba%d0%b0%d0%bb%d1%8c%d0%bd%d1%8b%d1%85-%d0%ba%d0%be%d1%80%d0%b7%d0%b8%d0%bd/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
blog here paycor login
check my blog paycor login
boya lekesi k?yafetten nas?l c?kar hakk?ndaki yaz?y? cok sevdim. Iste link: https://kendimacera.com/articles/kiyafetten-boya-lekesi-nasil-cikarilir/
Home Page paycor.com login
dig this paycor login
look at this site paycor login
Your Domain Name paycor login
click this paycor login
her explanation paycor.com login
find more information paycor login
YOURURL.com paycor login
find paycor login
Thanks for sharing such a clear and helpful article. It was a pleasure to read!
go to my blog paycor.com login
important site paycor login
right here paycor login
directory https://tornadocash.app
click here to investigate https://daobase.info
click here now https://tornadocash.app
find more https://bitmix.app
Home Page https://daobase.io
go to website https://tornadocash.app/
recommended you read https://yomix.biz/
index https://letsexchange.cc/
her explanation https://letsexchange.cc/
Visit Your URL https://yomix.biz/
pop over to this website https://anycoindirect.me/
read the article https://anycoindirect.me/
click to find out more https://tornadocash.app/
official source https://daobase.online/
web link https://letsexchange.cc
their website https://swaplab.io/
try this web-site https://letsexchange.cc/
check it out https://anycoindirect.me/
article source https://daobase.online
image source https://letsexchange.cc/
my site https://tornadocash.app
Recommended Site https://mixmy.money/
have a peek at this web-site https://yomix.biz/
click here to read https://swaplab.io/
see this page https://letsexchange.cc
top article https://daobase.io/
you can find out more https://mixmy.money
from this source https://swaplab.io
“cin cad?r? kurulumu” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Iste link: https://hobiyapma.com/articles/cin-cadiri-kurulum-rehberi/
Get the facts https://anycoindirect.me
see this page https://mixmy.money/
read review https://swaplab.io/
click this site https://bitmix.app/
this article https://mixmy.money/
try these out https://bitmix.app
try this site https://tornadocash.app/
find out here now https://daobase.info
straight from the source https://yomix.biz/
browse around this website https://swaplab.io
Good day everyone. I felt compelled to share my thoughts regarding this particular platform after several weeks of use. The layout is intuitive, the performance is reliable, and the support team has been quite responsive to my inquiries. Should you find yourself searching for an alternative, tk88 mvp may warrant your attention. Cheers.
go to website https://letsexchange.cc/
more tips here https://mixmy.money/
news https://tornadocash.app/
find out here https://bitmix.app/
moved here https://swaplab.io
discover here https://tornadocash.app
find out here now https://tornadocash.app/
check my blog https://mixmy.money/
my response https://daobase.info
more info here https://tornadocash.app
why not find out more https://daobase.io
Нашёл материал про SEO, где авторы называют это искусством видимости. Разбирают техническую оптимизацию, контент и работу со ссылками. Рекомендую к прочтению: https://yasamstudio.ru/2026/01/29/seo-prodvizhenie-sajta-iskusstvo-vidimosti-v-cifrovom-mire/
check here https://mixmy.money
Read Full Article https://anycoindirect.me/
see this website https://mixmy.money
visit homepage https://daobase.online
useful reference https://tornadocash.app
his comment is here https://tornadocash.app
Very informative content — simple, well written, and easy to understand. Keep it up!
useful content https://tornadocash.app/
official website https://tornadocash.app/
description https://mixmy.money
find out here now https://anycoindirect.me
click for more https://letsexchange.cc
view it https://daobase.io/
view it https://anycoindirect.me
have a peek at these guys https://mixmy.money
More Help https://daobase.io/
find here https://daobase.io/
Well done! The structure and clarity of your writing make it a great read.
i loved this https://swaplab.io/
hop over to this website https://swaplab.io/
my review here https://swaplab.io/
Going Here https://bitmix.app/
find more information https://bitmix.app
view it now https://daobase.info/
More Bonuses https://letsexchange.cc/
my website https://daobase.online
Related Site https://daobase.online/
blog https://swaplab.io
try this site https://mixmy.money/
original site https://bitmix.app
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
Между прочим, если вас интересует Истории успеха и тренды мастеров плетения из лозы, посмотрите сюда.
Вот, можете почитать:
https://fixora.ru/%d0%b8%d1%81%d1%82%d0%be%d1%80%d0%b8%d0%b8-%d1%83%d1%81%d0%bf%d0%b5%d1%85%d0%b0-%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80%d0%be%d0%b2-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%b8%d0%b7-%d0%bb/
Удачи вам в плетении и вдохновения от наших мастеров!
Добро пожаловать в мир плетения корзин из лозы, где каждый сможет найти советы от признанных мастеров!
Особенно понравился раздел про Материалы и технологии фигурной резки по дереву.
Смотрите сами:
https://fixora.ru/%d0%bc%d0%b0%d1%82%d0%b5%d1%80%d0%b8%d0%b0%d0%bb%d1%8b-%d0%b4%d0%bb%d1%8f-%d1%84%d0%b8%d0%b3%d1%83%d1%80%d0%bd%d0%be%d0%b9-%d1%80%d0%b5%d0%b7%d0%ba%d0%b8-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2/
Никогда не прекращайте учиться и совершенствоваться, ведь каждый день — это новый шаг в искусстве плетения!
Ayr?ca, eger ?spanak nas?l ekilir konusuyla ilgileniyorsan?z, suraya bir goz at?n. Kendiniz gorun: https://kendimacera.com/articles/ispanak-ekimi-en-uygun-zamanlar/
special info https://yomix.biz/
ahsap kupeste koctas hakk?ndaki makaleyi cok sevdim. Suradan okuyabilirsiniz: https://kendihobim.com/articles/koctas-ahsap-kupeste-estetik-fonksiyonellik/
useful source https://tornadocash.app/
useful site https://tornadocash.app
find more information https://swaplab.io
you can look here https://yomix.biz/
site here https://tornadocash.app
click for more https://tornadocash.app
find out here https://yomix.biz/
hop over to here https://yomix.biz
sites https://swaplab.io
go https://yomix.biz
her comment is here https://swaplab.io/
go to this site https://daobase.online
my company https://daobase.online/
More Help https://mixmy.money
view website https://daobase.info
published here https://anycoindirect.me
visit the site https://mixmy.money
read https://yomix.biz
great site https://letsexchange.cc/
find more info https://daobase.info
view https://yomix.biz/
site web https://tornadocash.app
he said https://mixmy.money
news https://daobase.info
browse around here https://letsexchange.cc
look what i found https://daobase.info
check over here https://daobase.info/
pop over to this site https://daobase.info/
additional info https://yomix.biz
see this https://swaplab.io
read what he said https://letsexchange.cc/
this post https://yomix.biz/
Статья про SEO как искусство и науку успеха. Автор разбирает ключевые компоненты продвижения и объясняет, почему это важно для бизнеса. Полезно для общего понимания: https://sushibb.ru/2026/01/30/seo-prodvizhenie-sajta-iskusstvo-i-nauka-uspeha-v-cifrovom-mire/
https://betfair.cat/
La casa de apuestas Betfair es una plataforma de juegos y apuestas online con prestigio internacional , destacada por su trayectoria de mas de dos decadas y por su papel pionero en el sistema de intercambio de apuestas (Exchange) .
official site https://anycoindirect.me
description https://mixmy.money/
learn this here now https://daobase.info
additional info https://daobase.info
browse around this web-site https://mixmy.money
see this here https://yomix.biz/
this post https://bitmix.app
The positive tone lifts mood while educating. It focuses on growth and solutions, not complaints. color games Such uplifting content makes the online space warmer and more supportive.
pop over here https://anycoindirect.me/
web https://daobase.online
he has a good point https://bitmix.app/
see it here https://daobase.online
click to read https://tornadocash.app
pop over to this website https://daobase.io
visit this web-site https://daobase.online
pop over to this website https://mixmy.money
description https://tornadocash.app
address https://anycoindirect.me/
“evde yemek yap?p satma uygulamas?” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Iste link: https://hobiyapma.com/articles/evde-yemek-yapip-satma-rehberi/
Bu arada, eger seda arslan konusuyla ilgileniyorsan?z, suraya bir goz at?n. Kendiniz gorun: https://kendifikirler.com/authors/seda-arslan/
Подробнее здесь kraken onion
здесь kraken ссылка тор
ссылка на сайт kraken onion ссылка
посмотреть на этом сайте kraken ссылка на сайт
Смотреть здесь kraken ссылка на сайт
подробнее кракен darknet
выберите ресурсы kraken onion
посетить сайт kraken ссылка зеркало
ссылка на сайт kraken darknet market
можно проверить ЗДЕСЬ кракен onion сайт
в этом разделе кракен ссылка kraken
посмотреть на этом сайте кракен ссылка
Подписка на тг-канал Casino X — это доступ к эксклюзивным промокодам и акциям. Переходите на casino x tg com и активируйте бонусы.
продолжить kraken сайт
нажмите, чтобы подробнее кракен даркнет маркет
подробнее здесь актуальные зеркала kraken
здесь kra ссылка
веб-сайт kraken ссылка на сайт
Подробнее здесь kraken onion зеркала
Главная kraken рабочая ссылка onion
каталог кракен онион зеркало
можно проверить ЗДЕСЬ kraken darknet
можно проверить ЗДЕСЬ kraken onion зеркала
смотреть здесь kraken актуальные ссылки
посмотреть на этом сайте kraken ссылка зеркало
этот контент кракен ссылка onion
взгляните на сайте здесь кракен onion сайт
Главная сайт kraken darknet
нажмите здесь kraken ссылка зеркало
сюда kraken сайт
посетить сайт kraken онион
веб-сайт кракен ссылка onion
узнать больше кракен даркнет маркет
страница kra ссылка
нажмите здесь актуальные зеркала kraken
узнать больше актуальные зеркала kraken
выберите ресурсы kraken darknet ссылка
зайти на сайт kraken ссылка зеркало
Bu arada, eger japon yap?st?r?c?s? kumastan nas?l c?kar konusuyla ilgileniyorsan?z, buray? inceleyin. Iste link: https://hobiseverler.com/articles/kumastan-japon-yapistirici-nasil-cikar/
Подробнее кракен даркнет маркет
Bu arada soyleyeyim, eger hangi renkler kar?s?rsa gri olur konusuyla ilgileniyorsan?z, suraya bak?n. Suradan okuyabilirsiniz: https://hobiprojesi.com/articles/hangi-renk-karisimi-gri-olur/
ссылка на сайт kraken ссылка зеркало
найти это kraken рабочая ссылка onion
нажмите здесь kraken актуальные ссылки
Узнать больше kraken ссылка тор
страница кракен даркнет
ссылка на сайт актуальные зеркала kraken
Читать далее kraken darknet
узнать актуальные зеркала kraken
подробнее kraken онион
посетить сайт актуальные зеркала kraken
узнать актуальные зеркала kraken
пояснения сайт kraken darknet
содержание kra ссылка
взгляните на сайте здесь kra ссылка
в этом разделе kraken рабочая ссылка onion
узнать kraken официальные ссылки
в этом разделе сайт kraken darknet
такой kraken onion ссылка
узнать больше kraken darknet
Перейти на сайт kraken ссылка тор
сайт kraken сайт
читать кракен onion сайт
в этом разделе актуальные зеркала kraken
можно проверить ЗДЕСЬ кракен darknet
ссылка на сайт kraken рабочая ссылка onion
нажмите здесь kra ссылка
читать kraken актуальные ссылки
узнать больше кракен onion сайт
https://rivalo.net.co/
Funciona como una casa de apuestas y portal de casino que ofrece sus servicios en el pais con total legalidad , amparada por el permiso otorgado por Coljuegos , garantizando asi que los fondos que ingresas, las extracciones que realizas y tu informacion confidencial estan protegidos por la ley colombiana .
можно проверить ЗДЕСЬ kraken onion зеркала
перенаправляется сюда kra ссылка
веб-сайт кракен darknet
Смотреть здесь kraken актуальные ссылки
взгляните на сайте здесь kraken рабочая ссылка onion
зайти на сайт kraken актуальные ссылки
подробнее здесь kraken официальные ссылки
на этом сайте kraken onion ссылка
выберите ресурсы кракен ссылка onion
Смотреть здесь кракен даркнет маркет
Смотреть здесь кракен ссылка
страница kraken darknet market
подробнее kraken onion
подробнее здесь кракен onion
найти это kraken онион тор
проверить сайт kraken onion
на этом сайте kraken зеркало
подробнее kraken ссылка на сайт
Читать далее кракен onion
нажмите здесь кракен onion сайт
содержание kraken онион тор
Узнать больше кракен даркнет
Источник кракен ссылка onion
подробнее кракен онион
узнать больше Здесь kraken онион
кликните сюда kraken сайт
страница kraken onion
здесь kraken onion зеркала
узнать больше kraken darknet ссылка
узнать больше сайт kraken onion
каталог сайт kraken onion
такой кракен ссылка
“hediyelik kitap ayrac? yap?m?” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Kendiniz gorun: https://kendihobim.com/articles/hediyelik-kitap-ayraci-yapimi/
klozet kapag? k?r?ld? yap?st?rma hakk?ndaki makaleyi gercekten begendim. Suradan okuyabilirsiniz: https://kendihobim.com/articles/klozet-kapagi-tamiri/
перенаправляется сюда kraken darknet ссылка
https://betsson.net.co/
A Betsson nao e uma operadora qualquer; com uma historia que ultrapassa seis decadas desde a sua criacao na Suecia, em 1963, construiu uma reputacao solida no cenario regulado de apostas, como e o caso da Colombia seguindo as diretrizes da Coljuegos.
нажмите здесь сайт kraken darknet
другие кракен ссылка
Check our site for updates > https://вип-свет.рф/
продолжить kraken darknet market
ссылка на сайт кракен ссылка
Подробнее здесь кракен онион зеркало
интернет kraken darknet ссылка
Читать далее kraken onion ссылка
смотреть здесь кракен darknet
другие кракен онион зеркало
посетить веб-сайт сайт kraken onion
ссылка на сайт кракен onion
каталог кракен онион тор
содержание kraken онион тор
подробнее сайт kraken darknet
Следующая страница кракен онион тор
каталог kraken онион
Узнать больше kraken маркетплейс зеркало
читать кракен онион
содержание кракен darknet
посмотреть в этом разделе kraken онион
посмотреть на этом сайте https://battlepass.ru/service/honkai
폰테크
폰테크라는 방식은 자금이 급히 필요한 상황에서 자주 검토되는 수단으로 언급됩니다. 최근 들어 비대면 방식, 당일 입금, 미납요금 대납, 전국 상담 등이 같이 노출되면서 소개 방식도 많아졌습니다. 다만 검토할 때는 속도보다 구조를 먼저 봐야 합니다. 어떻게 접수되고, 어떤 방식으로 진행되며, 입금까지 어떤 절차를 거치는지 확인하는 쪽이 더 중요합니다.
비대면 폰테크의 경우 방문 없이 상담, 접수, 진행 안내까지 상당 부분을 원격으로 처리하는 형태가 중심입니다. 수도권뿐 아니라 강원·충청·전라·경상·제주까지 전국 단위 상담을 내세우는 경우도 많습니다. 이동 부담이 적다는 점은 장점이지만, 보기보다 단순해 보여도 조건 확인은 더 꼼꼼해야 합니다.
폰테크나 가개통 안내에서는 보통 당일 진행, 당일 입금, 24시간 상담, 365일 연중무휴 같은 표현이 반복됩니다. 하지만 핵심은 문구가 아니라 진행 내용의 구체성입니다. 어떤 기종을 기준으로 상담하는지, 매입 조건이 어떻게 잡히는지, 비대면·방문·출장·대납 중 어떤 방식이 가능한지, 접수 후 입금은 언제 이뤄지는지까지 정리돼 있어야 합니다.
진행 흐름은 대체로 비슷합니다. 전화나 문자, 카카오톡으로 상담을 시작한 뒤, 그다음 기종과 조건을 맞춰 상담을 진행하고, 방문, 출장, 비대면, 대납 중 방식을 고른 뒤, 기기 수령 후 당일 지급으로 이어지는 구조입니다. 단계 수는 적어 보여도 실제로는 각 단계마다 확인할 내용이 다릅니다. 특히 상담 단계에서 본인 상황에 맞는 진행 형태와 가능 조건을 분명히 해야 뒤에서 꼬이지 않습니다.
전국 서비스를 내세우는 곳들은 지역명을 세세하게 나열하는 경우가 많습니다. 이런 구성은 지역 검색에 강하고, 이용자에게 자기 지역도 가능하다는 인식을 줍니다. 지역명과 서비스명을 붙인 표현이 반복되는 이유도 여기에 있습니다.
상담 채널은 대체로 전화, 카카오톡, 신청 버튼 중심으로 구성됩니다. 여기에 정식등록업체, 비대면 당일입금, 1:1 상담 같은 문구가 붙습니다. 다만 판단 기준은 광고 문구가 아니라 운영 정보와 절차 설명입니다.
결국 폰테크 소개에서 핵심은 세 가지입니다. 급전 상황에서 빠르게 진행할 수 있다는 점, 비대면과 전국 상담이 가능하다는 점, 상담 신청부터 지급까지 흐름이 단순하다는 점입니다. 반대로 이용자 입장에서는 속도보다 조건, 절차, 지역 대응 범위, 상담 내용의 명확성을 먼저 봐야 합니다.
продолжить https://battlepass.ru/service/steam_kong
website here Crypto trading
Для тех, кому нужна именно накрутка переходов на сайт, автор объясняет, почему важны не просто переходы, а правильное поведение после них. Иначе деньги на ветер.
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Для тех, кто ищет информацию по теме “Техники создания сложных узоров на корзинах”, там просто кладезь информации.
Вот, можете почитать:
https://fixora.ru/%d1%82%d0%b5%d1%85%d0%bd%d0%b8%d0%ba%d0%b8-%d1%81%d0%be%d0%b7%d0%b4%d0%b0%d0%bd%d0%b8%d1%8f-%d1%81%d0%bb%d0%be%d0%b6%d0%bd%d1%8b%d1%85-%d1%83%d0%b7%d0%be%d1%80%d0%be%d0%b2-%d0%bd%d0%b0-%d0%ba%d0%be/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Зацепил материал про Эффективный уход за инструментами для резьбы.
Вот, делюсь ссылкой:
https://fixora.ru/%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%bf%d0%be-%d1%83%d1%85%d0%be%d0%b4%d1%83-%d0%b7%d0%b0-%d0%b8%d0%bd%d1%81%d1%82%d1%80%d1%83%d0%bc%d0%b5%d0%bd%d1%82%d0%b0%d0%bc%d0%b8-%d0%b4%d0%bb%d1%8f-%d1%80/
Удачи вам в плетении и вдохновения от наших мастеров!
“under armour ne demek” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Kendiniz gorun: https://atletikgiyim.com/articles/under-armour-spor-modasi/
look at this web-site Dex
check out this site Crypto trading
find this Crypto trading
official website Dex
Перейти на сайт https://battlepass.ru/service/apex
my sources Dex
нажмите здесь https://battlepass.ru/service/valorant_t
здесь https://battlepass.ru/service/steam_kong
Your Domain Name copy trading
Подробнее https://battlepass.ru/service/fortnite
здесь https://battlepass.ru/service/free_fire
найти это https://battlepass.ru/service/free_fire
try this web-site copy trading
browse around here copy trading
нажмите, чтобы подробнее https://battlepass.ru/
read this article copy trading
Source Dex
Задумываетесь над плетением корзин? Узнайте, что советуют опытные мастера!
Между прочим, если вас интересует Советы по плетению корзин для экспертов, посмотрите сюда.
Ссылка ниже:
https://fixora.ru/%d1%82%d0%b5%d1%85%d0%bd%d0%b8%d0%ba%d0%b8-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%ba%d0%be%d1%80%d0%b7%d0%b8%d0%bd-%d0%b4%d0%bb%d1%8f-%d0%bf%d1%80%d0%be%d0%b4%d0%b2%d0%b8%d0%bd%d1%83/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
erkek arkadasa hediye kutusu haz?rlama hakk?ndaki makaleyi gercekten begendim. Kendiniz gorun: https://hobiprojesi.com/articles/erkek-sevgiliye-arkadasa-hediye-kutusu-hazirlama/
нажмите здесь https://battlepass.ru/service/pubg_mobile
navigate to these guys Crypto trading
web Dex
click to find out more Crypto trading
look at this website dexscreener
Visit Website Dex
узнать больше Здесь https://battlepass.ru/service/dota_mall
view it now Crypto trading
в этом разделе https://battlepass.ru/service/steam_kong
blog Dex
Продолжение https://battlepass.ru/service/roblox
read this dexscreener
webpage Crypto trading
visit homepage copy trading
продолжить https://battlepass.ru/
description Dex
great post to read Dex
click for info Crypto trading
check my source Dex
helpful site dexscreener
посмотреть в этом разделе https://battlepass.ru/service/pubg_mobile
click here for more Crypto trading
кликните сюда https://battlepass.ru/service/pubg_mobile
выберите ресурсы https://battlepass.ru/service/steam_kong
check my blog dexscreener
Продолжение https://battlepass.ru/service/valorant_t
на этом сайте https://battlepass.ru/
веб-сайт https://battlepass.ru/
посетить сайт https://battlepass.ru/service/genshin
веб-сайт https://battlepass.ru/service/free_fire
перенаправляется сюда https://battlepass.ru/
страница https://battlepass.ru/service/genshin
интернет https://battlepass.ru/service/fortnite
have a peek at these guys copy trading
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Особенно понравился материал про Материалы и технологии фигурной резки по дереву.
Вот, делюсь ссылкой:
https://fixora.ru/%d0%bc%d0%b0%d1%82%d0%b5%d1%80%d0%b8%d0%b0%d0%bb%d1%8b-%d0%b4%d0%bb%d1%8f-%d1%84%d0%b8%d0%b3%d1%83%d1%80%d0%bd%d0%be%d0%b9-%d1%80%d0%b5%d0%b7%d0%ba%d0%b8-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2/
Удачи вам в плетении и вдохновения от наших мастеров!
“erkek sevgiliye el yap?m? hediye haz?rlama” konusu icin mukemmel bir kaynak var. Iste link: https://kendifikirler.com/articles/erkek-sevgiliye-dogum-gunu-el-yapimi-hediyeler/
find this Crypto trading
веб-сайте https://battlepass.ru/
go to this site copy trading
go to this website dexscreener
перенаправляется сюда https://navek.by/
посмотреть в этом разделе https://battlepass.ru/service/roblox
здесь https://battlepass.ru/service/steam_kong
ссылка на сайт https://battlepass.ru/
каталог https://navek.by/catalog/montazh-pamyatnikov
has anyone here tried uwin yet cuz ive been looking at it and alot of my freinds are saying its better than what they had befor, should i reccomend it to my brother or is it not worth it uwin sports
найти это https://navek.by/catalog/ukladka-plitki/
discover this info here dexscreener
why not try here Crypto trading
next dexscreener
подробнее https://battlepass.ru/service/pubg_mobile
here are the findings Crypto trading
перенаправляется сюда https://battlepass.ru/service/apex
Подробнее здесь https://battlepass.ru/service/valorant_t
wikipedia reference Crypto trading
like this Dex
Нашёл материал, где подробно разбирается, как строить SMM-стратегию с нуля: от аудита и анализа аудитории до запуска рекламных кампаний и оптимизации. Есть раздел про контент-план и работу с UGC. Рекомендую: https://foto-videomontaz.ru/smm-prodvizhenie-v-soczialnyh-setyah-princzipy-instrumenty-i-pokazateli-effektivnosti/
Перейти на сайт https://battlepass.ru/service/honkai
такой https://battlepass.ru/service/steam_kong
посетить веб-сайт https://gurava.ru/properties/show/278
нажмите здесь https://piterskie-zametki.ru/223732
Смотреть здесь https://gurava.ru/georegions/54
Следующая страница https://gurava.ru/properties/show/1742
Узнать больше https://gurava.ru/geocities/61/%D0%A5%D0%B0%D0%B1%D0%B0%D1%80%D0%BE%D0%B2%D1%81%D0%BA
посмотреть на этом сайте https://gurava.ru/properties/show/793
Useful and straightforward content. Everything is explained clearly without unnecessary details.
содержание https://gurava.ru/georegions/5
другие https://gurava.ru/properties/show/4851
нажмите https://gurava.ru/georegions/47
перенаправляется сюда https://gurava.ru/geocities/17/%D0%A1%D1%82%D1%83%D0%BF%D0%B8%D0%BD%D0%BE
опубликовано здесь https://gurava.ru/properties/show/6532
узнать больше Здесь https://gurava.ru/properties/show/3650
Продолжение https://piterskie-zametki.ru/223917
посетить сайт https://gurava.ru/properties/show/5429
Смотреть здесь https://gurava.ru/properties/show/6411
подробнее https://gurava.ru/properties/show/4984
проверить сайт https://gurava.ru/properties/show/3915
Главная https://gurava.ru/properties/show/5926
найти это https://gurava.ru/properties/show/3704
сайт https://gurava.ru/properties/show/4033
ссылка на сайт https://gurava.ru/properties/show/6335
Перейти на сайт https://gurava.ru/geocities/50/%D0%92%D0%BE%D1%80%D0%BE%D0%BD%D0%B5%D0%B6
посмотреть на этом сайте https://gurava.ru/properties/show/1929
Подробнее здесь https://piterskie-zametki.ru/223766
перенаправляется сюда https://piterskie-zametki.ru/223713
Подробнее здесь https://gurava.ru/properties/show/6384
узнать больше https://piterskie-zametki.ru/223742
Продолжение https://piterskie-zametki.ru/223842
проверить сайт https://gurava.ru/properties/show/3730
продолжить https://gurava.ru/properties/show/1057
кликните сюда https://gurava.ru/properties/show/6344
на этом сайте https://piterskie-zametki.ru/223804
здесь https://gurava.ru/properties/show/6573
пояснения https://gurava.ru/properties/show/2153
веб-сайт https://piterskie-zametki.ru/223634
страница https://gurava.ru/properties/show/2622
Подробнее здесь https://piterskie-zametki.ru/223663
зайти на сайт https://gurava.ru/properties/show/969
этот сайт https://gurava.ru/geocities/17/%D0%94%D0%BE%D0%BC%D0%BE%D0%B4%D0%B5%D0%B4%D0%BE%D0%B2%D0%BE
нажмите здесь https://gurava.ru/properties/show/4638
Узнать больше https://gurava.ru/properties/show/3115
этот контент https://gurava.ru/properties/show/6355
опубликовано здесь https://gurava.ru/properties/show/3688
подробнее https://piterskie-zametki.ru/223720
на этом сайте https://piterskie-zametki.ru/223641
подробнее здесь https://gurava.ru/properties/show/3006
сайт https://piterskie-zametki.ru/223634
нажмите здесь https://piterskie-zametki.ru/223757
посмотреть в этом разделе https://gurava.ru/properties/show/4925
перейти на сайт https://gurava.ru/properties/show/5066
подробнее здесь https://piterskie-zametki.ru/223921
Перейти на сайт https://gurava.ru/properties/show/6438
перенаправляется сюда https://gurava.ru/properties/show/2747
в этом разделе https://gurava.ru/geocities/69/%D0%9D%D0%B0%D0%BB%D1%8C%D1%87%D0%B8%D0%BA
Читать далее https://piterskie-zametki.ru/223934
Продолжение https://piterskie-zametki.ru/223959
ссылка на сайт https://piterskie-zametki.ru/223820
Продолжение https://gurava.ru/geocities/29/%D0%93%D0%B0%D1%82%D1%87%D0%B8%D0%BD%D0%B0
веб-сайте https://gurava.ru/properties/show/6442
зайти на сайт https://gurava.ru/properties/show/1948
другие https://piterskie-zametki.ru/223716
узнать больше Здесь https://piterskie-zametki.ru/223637
можно проверить ЗДЕСЬ https://gurava.ru/properties/show/563
такой https://gurava.ru/properties/show/4776
нажмите, чтобы подробнее https://gurava.ru/geocities/8/%D0%9A%D0%B0%D0%BB%D1%83%D0%B3%D0%B0
нажмите https://piterskie-zametki.ru/223682
опубликовано здесь https://gurava.ru/properties/show/4205
зайти на сайт https://gurava.ru/properties/show/6336
узнать больше https://piterskie-zametki.ru/223939
посмотреть на этом сайте https://gurava.ru/properties/show/3282
другие https://gurava.ru/properties/show/6501
Перейти на сайт https://gurava.ru/properties/show/4550
нажмите здесь https://gurava.ru/geocities/29/%D0%A2%D0%B8%D1%85%D0%B2%D0%B8%D0%BD
веб-сайт https://gurava.ru/properties/show/3777
Смотреть здесь https://gurava.ru/geocities/84/%D0%9A%D1%80%D0%BE%D0%BD%D1%88%D1%82%D0%B0%D0%B4%D1%82
перейти на сайт https://piterskie-zametki.ru/223696
Very useful information, explained in a simple and clear way. I found exactly what I was looking for.
можно проверить ЗДЕСЬ https://gurava.ru/properties/show/4730
здесь https://gurava.ru/properties/show/6035
пояснения https://gurava.ru/georegions/81
здесь https://piterskie-zametki.ru/223663
Следующая страница https://gurava.ru/properties/show/6596
This was very helpful and well written. I’ll definitely come back to this site again.
узнать больше https://piterskie-zametki.ru/223732
такой https://gurava.ru/properties/show/6375
Следующая страница https://gurava.ru/georegions/54
этот контент https://gurava.ru/properties/show/6065
здесь https://gurava.ru/properties/show/6173
веб-сайте https://piterskie-zametki.ru/223866
содержание https://gurava.ru/properties/show/3622
узнать больше https://piterskie-zametki.ru/223789
подробнее https://piterskie-zametki.ru/223634
этот контент https://gurava.ru/properties/show/5545
пояснения https://gurava.ru/properties/show/6389
веб-сайт https://gurava.ru/properties/show/2095
посетить веб-сайт https://gurava.ru/properties/show/6427
Источник https://gurava.ru/properties/show/721
выберите ресурсы https://piterskie-zametki.ru/223817
Подробнее здесь https://gurava.ru/properties/show/2684
кликните сюда https://piterskie-zametki.ru/223931
Следующая страница https://gurava.ru/geoareas/51/%D0%9C%D0%B8%D0%BB%D0%BE%D1%81%D0%BB%D0%B0%D0%B2%D1%81%D0%BA%D0%B8%D0%B9?purpose_type=1
нажмите здесь https://gurava.ru/properties/show/6454
посетить веб-сайт https://piterskie-zametki.ru/223924
Источник https://piterskie-zametki.ru/223647
посетить веб-сайт https://gurava.ru/properties/show/6602
узнать больше https://piterskie-zametki.ru/223947
ссылка на сайт https://piterskie-zametki.ru/223856
интернет https://gurava.ru/properties/show/3572
Следующая страница https://gurava.ru/properties/show/6561
Источник https://piterskie-zametki.ru/223939
здесь https://piterskie-zametki.ru/223763
пояснения https://gurava.ru/properties/show/304
подробнее https://gurava.ru/properties/show/2285
Подробнее здесь https://gurava.ru/properties/show/5488
нажмите https://gurava.ru/properties/show/870
этот сайт https://piterskie-zametki.ru/223937
узнать больше Здесь https://piterskie-zametki.ru/223699
сайт https://gurava.ru/georegions/38
узнать больше Здесь https://gurava.ru/properties/show/4333
ссылка на сайт https://gurava.ru/properties/show/4149
подробнее https://piterskie-zametki.ru/223716
этот сайт https://gurava.ru/geocities/48/%D0%91%D0%B0%D1%80%D0%BD%D0%B0%D1%83%D0%BB?property_type=7&purpose_type=1
посмотреть на этом сайте https://piterskie-zametki.ru/223607
посетить сайт https://gurava.ru/properties/show/6583
веб-сайте https://gurava.ru/properties/show/6298
здесь https://piterskie-zametki.ru/223836
сайт https://gurava.ru/properties/show/4104
Смотреть здесь https://gurava.ru/properties/show/3730
ссылка на сайт https://gurava.ru/properties/show/5957
на этом сайте https://gurava.ru/properties/show/4884
Смотреть здесь https://gurava.ru/properties/show/3844
опубликовано здесь https://gurava.ru/properties/show/743
содержание https://gurava.ru/georegions/23
подробнее здесь https://gurava.ru/properties/show/3365
폰테크
폰테크는 보통 자금이 급히 필요한 상황에서 빠르게 검토되는 방식으로 소개됩니다. 요즘은 비대면 진행과 당일 입금, 미납요금 대납, 전국 상담 같은 항목이 함께 붙으면서 안내 문구도 늘어났습니다. 하지만 검토할 때는 속도보다 구조를 먼저 봐야 합니다. 어떤 절차로 접수되고 진행되고 입금되는지 보는 것이 우선입니다.
비대면 폰테크는 방문 없이 상담부터 접수, 진행 안내까지 이어지는 구조가 많습니다. 수도권뿐 아니라 강원, 충청, 전라, 경상, 제주까지 전국 대응을 강조하는 곳도 많습니다. 직접 움직이지 않아도 된다는 점은 편하지만, 보기보다 단순해 보여도 조건 확인은 더 꼼꼼해야 합니다.
폰테크·가개통 안내 문구에서는 보통 당일 진행, 당일 입금, 24시간 상담, 365일 연중무휴 같은 표현이 반복됩니다. 이런 문구보다 더 중요한 것은 진행 방식의 구체성입니다. 상담 기준 기종, 매입 조건, 가능한 진행 방식, 접수 후 입금 시점까지 분명해야 합니다.
진행 흐름은 대체로 비슷합니다. 전화, 문자, 카카오톡으로 상담 신청을 받고, 조건과 기종을 확인한 다음, 원하는 거래 방식을 선택하고, 기기 수령 이후 당일 지급으로 연결되는 형태입니다. 단계 수는 적어 보여도 실제로는 각 단계마다 확인할 내용이 다릅니다. 특히 처음 상담 단계에서 가능 조건을 분명히 해두는 것이 중요합니다.
전국 단위로 운영된다고 하는 곳들은 지역명을 세세하게 나열하는 경우가 많습니다. 이런 나열 방식은 지역 기반 검색에 맞춰진 구성이며, 방문자에게 본인 지역도 포함된다는 느낌을 줍니다. 서울 폰테크, 경기 폰테크, 인천 가개통 같은 표현이 반복되는 이유도 여기에 있습니다.
상담 채널은 보통 대표전화, 카카오톡, 상담신청 버튼처럼 바로 연결되는 구조로 잡힙니다. 여기에 정식등록업체, 비대면 당일입금, 1:1 상담 같은 문구가 붙습니다. 하지만 실제 판단 기준은 문구가 아니라 운영 정보, 절차 설명, 상담 내용의 명확성입니다.
결국 폰테크 소개에서 핵심은 세 가지입니다. 빠른 진행 가능성, 비대면과 전국 대응, 단순한 진행 흐름이 주된 포인트입니다. 반대로 이용자 입장에서는 속도보다 조건, 절차, 지역 대응 범위, 상담 내용의 명확성을 먼저 봐야 합니다.
узнать больше https://gurava.ru/properties/show/3575
пояснения https://gurava.ru/geocities/14/%D0%92%D0%BE%D0%BB%D0%BE%D0%B3%D0%B4%D0%B0
Смотреть здесь https://gurava.ru/properties/show/5521
сюда
Приветственные бонусы по промокоду казино Enomo
Продолжение https://gurava.ru/properties/show/1380
посетить веб-сайт
казино 7 промокод
посетить веб-сайт https://piterskie-zametki.ru/223661
перенаправляется сюда https://gurava.ru/properties/show/6460
перенаправляется сюда https://gurava.ru/properties/show/6552
такой https://gurava.ru/geoareas/17/%D0%9A%D0%BB%D0%B8%D0%BD
кликните сюда
Vegas grand casino промокод
продолжить
Приветственные бонусы по промокоду casino Jozz
перейти на сайт https://gurava.ru/properties/show/1218
Следующая страница https://gurava.ru/georegions/72
подробнее здесь https://gurava.ru/properties/show/6007
страница
Приветственные бонусы по промокоду казино Flagman
в этом разделе
Бонусы за регистрацию с промокодом Бет Бум
узнать больше https://gurava.ru/properties/show/4623
сайт
Покердом промокод
сюда
Bounty casino промокод при регистрации
посмотреть в этом разделе https://gurava.ru/properties/show/3232
Источник
Bitzamo промокод при регистрации
узнать больше Здесь https://piterskie-zametki.ru/223688
посмотреть на этом сайте https://piterskie-zametki.ru/223678
узнать больше Здесь
1win промокод бонусы на депозит
содержание
Приветственные бонусы по промокоду Betwinner
перенаправляется сюда https://piterskie-zametki.ru/223873
сюда https://piterskie-zametki.ru/223766
сюда https://gurava.ru/properties/show/6514
узнать
Приветственные бонусы по промокоду казино kometa
веб-сайте https://piterskie-zametki.ru/223836
нажмите, чтобы подробнее https://piterskie-zametki.ru/223836
перейдите на этот сайт https://piterskie-zametki.ru/223696
нажмите здесь
1go casino код активации при регистрации
Смотреть здесь https://gurava.ru/geocities/41/%D0%A2%D1%83%D0%BB%D0%B0
Nowoczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsza kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Nastepnie krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Dobrze jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele casino logowanie https://vikagold.com/vulkan-spiele-polska-vulkanspiele-online-serwis/
وختاماً، يشدد النص على أهمية الاستخدام المسؤول وتقييم تجربة المستخدم باستمرار ضمن برنامج 888starz.
888starz تنزيل https://arabesqueguide.net/%d8%aa%d8%ad%d9%85%d9%8a%d9%84-888starz-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-apk-%d9%88ios-%d9%85%d8%aa%d9%88%d8%a7%d9%81%d9%82-%d9%85%d8%b9-%d9%83%d8%a7%d9%81%d8%a9-%d8%a7%d9%84%d8%a3%d8%ac/
перенаправляется сюда https://piterskie-zametki.ru/223849
888starz предлагает широкий выбор игр, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Сервис снабжен лицензией и контролируется надёжными органами, .
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Процесс верификации не доставляет сложностей и занимает короткое время, . Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Игровые автоматы отличаются захватывающим дизайном и показательными бонусами. В разделе настольных игр встречаются рулетка, блэкджек, баккара и другие варианты, .
888starz skachat apk https://888starzuzz.com/apk/
пояснения
kometa casino промокод
продолжить
Бонусы за регистрацию с промокодом Vavada
страница https://gurava.ru/properties/show/6095
зайти на сайт
Приветственные бонусы по промокоду казино Blitz
читать
Pinco casino промокод бонусы на депозит
Смотреть здесь https://gurava.ru/properties/show/1908
ссылка на сайт https://gurava.ru/properties/show/3344
пояснения
Мелбет промокод
нажмите здесь
Приветственные бонусы по промокоду 1go казино
подробнее
Покерок промокод бонусы на депозит
смотреть здесь
1go casino код активации
смотреть здесь https://gurava.ru/properties/show/979
Перейти на сайт
Bounty casino промокод бонусы на депозит
сюда
Приветственные бонусы по промокоду казино Bitzamo
здесь
Daddy casino промокод при регистрации
Подробнее здесь https://gurava.ru/properties/show/6378
продолжить
Irwin casino код активации
проверить сайт https://gurava.ru/properties/show/6572
нажмите здесь https://gurava.ru/geocities/17/%D0%A0%D0%B0%D0%BC%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%B5
нажмите здесь
Unlim casino промокод при регистрации
посетить веб-сайт
Приветственные бонусы по промокоду казино Lex
Подробнее https://gurava.ru/properties/show/6465
Перейти на сайт https://gurava.ru/georegions/52
перейти на сайт https://gurava.ru/properties/show/5035
узнать больше
Бонусы за регистрацию с промокодом Gama casino
узнать больше Здесь https://gurava.ru/properties/show/3329
Смотреть здесь https://gurava.ru/properties/show/6660
Следующая страница https://gurava.ru/properties/show/6096
на этом сайте https://gurava.ru/properties/show/6738
Читать далее https://gurava.ru/properties/show/6742
каталог https://gurava.ru/properties/show/1948
узнать больше https://gurava.ru/geocities/66/%D0%9D%D0%BE%D0%B2%D0%BE%D1%81%D0%B8%D0%B1%D0%B8%D1%80%D1%81%D0%BA
Wspolczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Wulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Nastepnie krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Dobrze jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
spiele vulkan https://tatogy.com/vulkan-spiele-polska-2026-vulkanspiele-casino-login/
هذا مقال موجّه حول برنامج 888starz الذي يوفر منصّة ألعاب مثيرة وآمنة للمستخدمين.
تحميل تطبيق 888starz https://fontysmade.nl/%d9%88%d9%83%d9%8a%d9%84-888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d8%a7%d9%84%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-%d9%85%d8%b9-%d8%af%d8%b9%d9%85-%d8%a7%d9%84%d9%86%d8%b8%d8%a7%d9%85%d9%8a%d9%86-a/
выберите ресурсы
Приветственные бонусы по промокоду казино Enomo
подробнее здесь https://gurava.ru/properties/show/6255
интернет https://gurava.ru/georegions/59
перейти на сайт https://gurava.ru/geocities/10/%D0%9A%D1%80%D0%BE%D0%BF%D0%BE%D1%82%D0%BA%D0%B8%D0%BD
здесь https://gurava.ru/georegions/19
Nowoczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Glowny aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Specyficzna sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Nastepnie krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkan spiele https://alaskaresidential.com/vulkanspiele-2026-vulkan-spiele-online-polska/
يعرض الجزء الأول المبادئ الأساسية التي يقوم عليها برنامج 888starz لضمان تجربة موثوقة.
تحميل 888starz https://playamicasa.com/uncategorized/%d8%a8%d8%b1%d9%88%d9%85%d9%88-%d9%83%d9%88%d8%af-888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d9%88%d8%aa%d9%81%d8%b9%d9%8a%d9%84-apk-%d9%88%d9%86%d8%b3%d8%ae%d8%a9-ios/
найти это
Win777 casino промокод
такой
Gizbo casino промокод при регистрации
Nowoczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsze kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Nastepnie krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Dobrze jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele pl https://tabletshome.com/vulkanspiele-polska-vulkan-spiele-pl-platforma/
وختاماً، يبرز النص أهمية التطبيق المسؤول للاستمتاع الأمثل بتجربة برنامج 888starz وتقييمها دورياً.
888starz تحميل https://jetprozhe.com/888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-apk-%d9%88%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-ios-%d9%85%d8%b9-%d8%b4%d8%b1%d8%ad-%d9%85/
узнать больше
Vegas grand casino промокод при регистрации
посмотреть в этом разделе
Ауф казино промокод
Подробнее https://gurava.ru/properties/show/2506
подробнее здесь
Leebet промокод бонусы на депозит
Источник https://gurava.ru/properties/show/6095
узнать больше https://gurava.ru/properties/show/6007
перейдите на этот сайт https://gurava.ru/properties/show/796
нажмите, чтобы подробнее https://gurava.ru/properties/show/6535
Следующая страница https://gurava.ru/georegions/37
узнать больше Здесь https://gurava.ru/properties/show/6606
пояснения
Бонусы за регистрацию с промокодом Casino X
кликните сюда https://gurava.ru/properties/show/4357
в этом разделе
Vodka casino промокод
كما يقدم المقال أمثلة على كيفية اختيار الألعاب وتحديد الميزانية وتفعيل الإعدادات الأمنية.
888starz برومو كود https://academia-cursos.help/%d8%aa%d8%ad%d9%85%d9%8a%d9%84-888starz-%d9%84%d9%84%d8%a7%d9%86%d8%af%d8%b1%d9%88%d9%8a%d8%af-%d9%88ios-%d8%af%d9%84%d9%8a%d9%84-%d8%a7%d9%84%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-%d8%a8%d8%ae/
Aktualne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Istotnym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Nastepnie krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkan spiele polska https://construconsultores.com/vulkanspiele-polska-vulkan-spiele-casino-online-strona-glowna/
посмотреть в этом разделе
казино клубника промокод
Следующая страница
Jet casino промокод
Казино 888starz радует игроков разнообразием слот-автоматов, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Процесс верификации прост и позволяет начать играть в считанные минуты, . Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . В разделе настольных игр встречаются рулетка, блэкджек, баккара и другие варианты, .
888 bet https://888starzuzz.com/
Главная https://gurava.ru/geosettlements/33/%D0%91%D1%80%D1%8F%D0%BD%D1%81%D0%BA/%D0%91%D0%BE%D0%BB%D1%8C%D1%88%D0%BE%D0%B5%20%D0%9F%D0%BE%D0%BB%D0%BF%D0%B8%D0%BD%D0%BE
Главная
banda casino промокод бонусы на депозит
Nowoczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Glowny aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsza kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Nastepnie krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
kasyno vulkanspiele https://raapchikcraft.com/kasyno-vulkan-spiele-vulkanspiele-pl-2026/
هذا مقال موجّه حول برنامج 888starz الذي يوفر منصّة ألعاب مثيرة وآمنة للمستخدمين.
تحميل برنامج 888starz https://maps999.com/888starz-ios-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d8%a7%d9%84%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-%d8%b9%d9%84%d9%89-iphone-%d8%a8%d8%ae%d8%b7%d9%88%d8%a7%d8%aa-%d8%b3%d9%87%d9%84%d8%a9/
Wspolczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Glowny aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Specyficzna sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Nastepnie krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele kasyno https://vyaparappsurat.store/kasyno-vulkan-spiele-pl-vulkanspiele-polska/
نبدأ بتحديد تعريف برنامج 888starz وآلية عمله داخل البيئة الرقمية ومتطلبات التسجيل.
888starz تنزيل https://arabesqueguide.net/%d8%aa%d8%ad%d9%85%d9%8a%d9%84-888starz-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-apk-%d9%88ios-%d9%85%d8%aa%d9%88%d8%a7%d9%81%d9%82-%d9%85%d8%b9-%d9%83%d8%a7%d9%81%d8%a9-%d8%a7%d9%84%d8%a3%d8%ac/
888starz предлагает широкий выбор игр, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Компания обеспечила соответствие международным стандартам безопасности.
Гражданам Узбекистана доступна быстрая регистрация на ресурсе 888starz. Верификация проходит быстро, что дает возможность сразу пополнить счёт. Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Слоты радуют яркой графикой, бонусными режимами и шансами на джекпот, . Раздел настольных игр на платформе также обширен: рулетка, блэкджек, бинго и прочие варианты, .
888старз вход https://888starzuzz.com/
Казино 888starz радует игроков разнообразием слот-автоматов, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Компания обеспечила соответствие международным стандартам безопасности.
В Узбекистане жители получают доступ к регистрации на 888starz с минимальными требованиями, . Верификация проходит быстро, что дает возможность сразу пополнить счёт. Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Слоты радуют яркой графикой, бонусными режимами и шансами на джекпот, . В разделе настольных игр встречаются рулетка, блэкджек, баккара и другие варианты, .
888starz apk https://888starzuzz.com/apk/
посетить веб-сайт https://gurava.ru/properties/show/6391
интернет https://gurava.ru/properties/show/6448
посмотреть на этом сайте https://gurava.ru/properties/show/5979
Удобная платформа 888starz привлекает многих любителей азартных развлечений. В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
В Узбекистане жители получают доступ к регистрации на 888starz с минимальными требованиями, . Верификация проходит быстро, что дает возможность сразу пополнить счёт. Преимущества платформы включают мгновенные выплаты и широкий ассортимент игр, . Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Слоты радуют яркой графикой, бонусными режимами и шансами на джекпот, . Коллекция настольных игр на сайте богата разными вариациями классических развлечений.
888starz sayt https://888starzuzz.com/
Aktualne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Glowny aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Specyficzna sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsze kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Istotnym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Potem krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Dobrze jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkan spiele casino opinie https://iran-shabakeh.com/vulkan-spiele-casino-polska-vulkanspiele-oficjalna-strona/
يشرح القسم الثاني تنظيم الصفحات وكيفية الوصول السريع إلى الدعم والميزة الأساسية.
لعبه 888starz https://learn2speakspanish.site/2025/08/14/888starz-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-apk-%d9%88%d9%86%d8%b3%d8%ae%d8%a9-ios-%d9%85%d8%b9-%d8%af%d9%84%d9%8a%d9%84-%d8%aa%d8%b4%d8%ba%d9%8a%d9%84-%d9%88%d8%a7%d8%b6%d8%ad/
Wspolczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Glowny aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Potem krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Dobrze jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele kasyno https://royalflamesart.com/vulkanspiele-polska-vulkan-spiele-casino-online-portal/
تُقدَّم في القسم الثاني نظرة تفصيلية على واجهة المستخدم وكيفية التنقل بين الأقسام بسلاسة.
تحميل لعبه 888starz https://playamicasa.com/uncategorized/%d8%aa%d8%ad%d9%85%d9%8a%d9%84-888starz-ios-%d9%86%d8%b3%d8%ae%d8%a9-iphone-%d9%85%d8%b9-%d8%b4%d8%b1%d8%ad-%d8%ae%d8%b7%d9%88%d8%a7%d8%aa-%d8%a7%d9%84%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa/
Nowoczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsza kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Potem krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkan spiele login https://inscada.ru/vulkanspiele-casino-polska-2026-vulkan-spiele/
كما يقدم المقال أمثلة على كيفية اختيار الألعاب وتحديد الميزانية وتفعيل الإعدادات الأمنية.
888starz bet https://gasbillcheckonline.com/888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%af%d9%84%d9%8a%d9%84-%d8%a7%d9%84%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-%d9%84%d9%80-apk-%d9%88%d9%86%d8%b3%d8%ae%d8%a9-io/
Удобная платформа 888starz привлекает многих любителей азартных развлечений. В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Компания обеспечила соответствие международным стандартам безопасности.
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Верификация проходит быстро, что дает возможность сразу пополнить счёт. Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Слоты радуют яркой графикой, бонусными режимами и шансами на джекпот, . В разделе настольных игр встречаются рулетка, блэкджек, баккара и другие варианты, .
888star apk https://888starzuzz.com/apk/
Удобная платформа 888starz привлекает многих любителей азартных развлечений. В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Сервис снабжен лицензией и контролируется надёжными органами, .
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Верификация проходит быстро, что дает возможность сразу пополнить счёт. Преимущества платформы включают мгновенные выплаты и широкий ассортимент игр, . Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Игровые автоматы отличаются захватывающим дизайном и показательными бонусами. Раздел настольных игр на платформе также обширен: рулетка, блэкджек, бинго и прочие варианты, .
888starz вход в личный кабинет https://888starzuzz.com/
Nowoczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsze kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Kolejnym krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
kasyno vulkanspiele kasyno vulkanspiele.
نبدأ بتحديد تعريف برنامج 888starz وآلية عمله داخل البيئة الرقمية ومتطلبات التسجيل.
تنزيل برنامج 888starz https://anfadigital.com/case-studies/%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-apk-%d9%84%d9%84%d8%a3%d9%86%d8%af%d8%b1%d9%88%d9%8a%d8%af-%d9%88%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-ios/
888starz كازينو في مصر يقدم تجربة لعب شاملة تجمع بين الأمان والتنوع والترفيه, 888starz كازينو في مصر يوفر مجموعة ألعاب واسعة وآمنة لجميع اللاعبين, 888starz كازينو في مصر يضمن دعمًا متواصلًا وخيارات دفع موثوقة بما يتناسب مع الثقافة المصرية
888starz egypt https://888starz-egypt-ar.com/
Kasyna w Polsce czesto oferuja vulkanspiele, ktore przenosza graczy w dynamiczny swiat lawy i wybuchow.
vulkanspiele promo code 2026 https://vulkannclubs.com/kod-promocyjny/
Aktualne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Wulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsze kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Potem krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele login vulkanspiele login.
يناقش القسم الرابع إجراءات الأمان وتشفير البيانات وسياسات الخصوصية المتبعة لدى البرنامج.
تنزيل تطبيق 888starz https://shopwheyfni.com/featured_item/888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-apk-%d9%88ios-%d9%85%d8%b9-%d8%b4%d8%b1%d8%ad-%d8%a7%d9%84%d8%aa%d8%ab%d8%a8%d9%8a/
Создание рефератов заметно упростилась благодаря актуальным нейросетям, которые дают возможность быстрее искать информацию, составлять план, делать текст более логичным и тратить меньше времени на однотипные действия. Если хочется быстро сравнить такие сервисы, можно найти рейтинг нейросетей для рефератов на сайте http://neyroseti-dlya-referatov.ru/, где собраны известные нейросети для учебы, сравнение возможностей сервисов и полезные советы по выбору.
www
Nowoczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Glowny aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsza kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Kolejnym krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkan spiele https://alaskaresidential.com/vulkanspiele-2026-vulkan-spiele-online-polska/
نبدأ بتحديد تعريف برنامج 888starz وآلية عمله داخل البيئة الرقمية ومتطلبات التسجيل.
تحميل تطبيق 888starz https://fontysmade.nl/%d9%88%d9%83%d9%8a%d9%84-888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d8%a7%d9%84%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-%d9%85%d8%b9-%d8%af%d8%b9%d9%85-%d8%a7%d9%84%d9%86%d8%b8%d8%a7%d9%85%d9%8a%d9%86-a/
https://sportium.net.co/
A plataforma Sportium Colombia trata-se de um cassino e casa de apostas esportivas online que funciona com plena legalidade sob a licenca da Coljuegos, decorrente da uniao entre CIRSA e Ladbrokes desde o ano de 2007. Oferece uma plataforma completa e confiavel onde os jogadores colombianos podem desfrutar desde palpites no futebol ate slots e casino ao vivo com atendentes reais, tudo integrado em uma so plataforma.
https://miamifightcard.com/
For MediaFightCard, the betting odds reveal a intriguing dynamic with belt-holders being the betting underdogs and contenders occupying favorite status. In the headliner for the available light heavyweight title, previous belt-holder Jiri Prochazka opened as a marginal favorite at -143 over the in-form Carlos Ulberg, who comes in as a +116 underdog even with his nine-fight winning streak.
https://888starz.net.co/
888Starz Colombia es una plataforma de casino online y casa de apuestas que reune mas de 9.500 juegos, abarcando tragamonedas en linea, mesas con crupier en vivo asi como una extensa oferta deportiva que cubre desde la Liga BetPlay hasta la UEFA Champions League y las competiciones de esports.
يُركز القسم الثالث على تنوع الألعاب المعروضة والخيارات المتاحة للمستخدمين.
888starz apk https://thegoldenalbatross.com/%d8%aa%d9%86%d8%b2%d9%8a%d9%84-888starz-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-android-%d9%88ios-%d9%85%d8%b9-%d8%af%d9%84%d9%8a%d9%84-%d8%a7%d9%84%d8%a5%d8%b9%d8%af/
Nowoczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Kolejnym krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
kasyno vulkan spiele https://dbsecurityshop.com/vulkan-spiele-polska-casino-vulkanspiele-pl/
нажмите здесь кракен ссылка
https://ufc327odds.com/
This Miami-held light heavyweight title fight at UFC 327 offers a genuine pick’em for the gambling public, as previous belt holder Jiri Prochazka (-142) and hot-streaking knockout specialist Carlos Ulberg (+120) get set to square off for the unclaimed belt. The tight odds underscore how well-paired these two stand-up fighters truly are, setting up a matchup where a bet on either competitor ultimately comes down to which explosive fighting style you believe will reign supreme.
وختاماً، يشدد النص على أهمية الاستخدام المسؤول وتقييم تجربة المستخدم باستمرار ضمن برنامج 888starz.
تنزيل برنامج 888starz تنزيل برنامج 888starz.
Aktualne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsze kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Potem krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele kasyno https://royalflamesart.com/vulkanspiele-polska-vulkan-spiele-casino-online-portal/
Aktualne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Wulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsza kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Istotnym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Nastepnie krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Dobrze jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele opinie https://stemxplore.ca/vulkanspiele-polska-oficjalne-vulkan-spiele-casino-online/
يشرح المقال خطوات التسجيل الأولي وكيفية البدء في تجربة برنامج 888starz مع مراعاة الشروط.
تحميل تطبيق 888starz https://progress99.ru/%d8%a8%d8%b1%d9%88%d9%85%d9%88-%d9%83%d9%88%d8%af-888starz-%d8%ae%d8%b7%d9%88%d8%a7%d8%aa-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d9%88%d8%aa%d9%81%d8%b9%d9%8a%d9%84-%d8%a7%d9%84%d8%aa%d8%b7%d8%a8/
Wspolczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Wulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Potem krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
spiele vulkan spiele vulkan.
في هذا النص سنتعرف على برنامج 888starz، ونتتبع أهم ميزاته ورؤيته واستراتيجيته في سوق الألعاب الإلكترونية.
تحميل برنامج 888starz https://antoniatochka.com/888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-apk-%d9%88ios-%d9%85%d8%b9-%d8%b4%d8%b1%d8%ad-%d8%a7%d9%84%d8%aa%d8%ab%d8%a8%d9%8a/
Казино 888starz радует игроков разнообразием слот-автоматов, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Сервис снабжен лицензией и контролируется надёжными органами, .
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Процесс верификации не доставляет сложностей и занимает короткое время, . Преимущества платформы включают мгновенные выплаты и широкий ассортимент игр, . Абзац 2: Слот-автоматы на 888starz представлены крупными студиями и независимыми разработчиками, . Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . В разделе настольных игр встречаются рулетка, блэкджек, баккара и другие варианты, .
888starz bet https://888starzuzz.com/
وختاماً، يشدد النص على أهمية الاستخدام المسؤول وتقييم تجربة المستخدم باستمرار ضمن برنامج 888starz.
888starz للايفون https://cthati.com/888starz-app-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d9%88%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-android-%d9%88ios-%d8%a8%d9%88%d8%a7%d8%ac%d9%87%d8%a9-%d8%b3%d9%87%d9%84/
Nowoczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Specyficzna sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Nastepnie krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
online casino vulkanspiele https://wistok.com/online-kasyno-vulkan-spiele-vulkanspiele-pl/
Aktualne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsza kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Nastepnie krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkan spiele login https://kons-energia.ru/vulkan-spiele-pl-vulkanspiele-casino-polska-2026-platforma/
يبدأ الحديث بتحديد ماهية برنامج 888starz وكيف يعمل بالضبط داخل المنصة الرقمية.
تنزيل برنامج 888starz https://anfadigital.com/case-studies/%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-apk-%d9%84%d9%84%d8%a3%d9%86%d8%af%d8%b1%d9%88%d9%8a%d8%af-%d9%88%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-ios/
Написание рефератов сегодня стала намного проще благодаря умным нейросетям, которые позволяют ускорять поиск информации, формировать план текста, делать текст более логичным и избавляться от части рутинной работы. Если хочется быстро сравнить такие сервисы, можно посмотреть рейтинг нейросетей для рефератов на сайте http://neyroseti-dlya-referatov.ru/, где собраны известные нейросети для учебы, сопоставление их возможностей и понятные рекомендации по подбору сервиса.
этот контент kraken ссылка тор
Работа над рефератами теперь стала проще благодаря актуальным нейросетям, которые позволяют намного быстрее находить материалы, делать план работы, улучшать структуру текста и сокращать время на рутинные задачи. Если нужен удобный рейтинг подобных инструментов, можно найти рейтинг нейросетей для рефератов на сайте http://neyroseti-dlya-referatov.ru/, где собраны популярные решения для учебы, сравнение возможностей сервисов и полезные рекомендации по выбору.
www
888starz كازينو في مصر يقدم تجربة لعب شاملة تجمع بين الأمان والتنوع والترفيه, 888starz كازينو في مصر يوفر مجموعة ألعاب واسعة وآمنة لجميع اللاعبين, 888starz كازينو في مصر يضمن دعمًا متواصلًا وخيارات دفع موثوقة بما يتناسب مع الثقافة المصرية
starz 888 https://888starz-egypt-ar.com/
W Polsce popularne sa kasyna online z motywem vulkanspiele, ktore zapewniaja intensywne doznania.
online casino vulkanspiele https://vulkannclubs.com/
888starz предлагает широкий выбор игр, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Компания обеспечила соответствие международным стандартам безопасности.
В Узбекистане жители получают доступ к регистрации на 888starz с минимальными требованиями, . Процесс верификации не доставляет сложностей и занимает короткое время, . Сервис обеспечивает быстрые выплаты и богатый выбор развлечений. Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Игровые автоматы отличаются захватывающим дизайном и показательными бонусами. Раздел настольных игр на платформе также обширен: рулетка, блэкджек, бинго и прочие варианты, .
888starz bonus code https://888starzuzz.com/promo-code/
Сравниваю разные компании, вот ещё один вариант: https://f1-it.ru/uslugi-smm-prodvizheniya-v-sotsialynh-setyah.html
Казино 888starz радует игроков разнообразием слот-автоматов, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Процесс верификации не доставляет сложностей и занимает короткое время, . Преимущества платформы включают мгновенные выплаты и широкий ассортимент игр, . Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . Коллекция настольных игр на сайте богата разными вариациями классических развлечений.
888 бет https://888starzuzz.com/
Wspolczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Glowny aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsza kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Potem krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele logowanie https://amritawalia-art.com/2026/02/18/vulkan-spiele-polska-vulkanspiele-pl-online-2026/
كما يعرض أمثلة عملية لاختيار الألعاب وضبط الميزانية وتفعيل الإعدادات الأمنية داخل المنصة.
888starz برومو كود https://bizblogz.com/%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-888starz-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-apk-%d9%88ios-%d9%85%d8%b9-%d8%a7%d9%84%d9%85%d8%aa%d8%b7%d9%84%d8%a8%d8%a7%d8%aa/
нажмите здесь kraken onion ссылка
Wspolczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Wulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Potem krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Dobrze jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkan spiele https://dabalnet.com/vulkanspiele-casino-pl-vulkan-spiele-polska-2026/
يغطي القسم الثالث نطاق الألعاب وتشكيلة الخيارات التي تتيحها المنصة للمستخدمين.
تحميل 888starz للاندرويد https://agosto.in/?p=5972/
Aktualne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Istotnym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Potem krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkan spiele casino login https://joshbd.com/vulkanspiele-polska-vulkan-spiele-online-platforma/
يعرض الجزء الأول المبادئ الأساسية التي يقوم عليها برنامج 888starz لضمان تجربة موثوقة.
لعبه 888starz https://vanilla-sand.com/888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-apk-%d9%88ios-%d8%ac%d8%a7%d9%87%d8%b2-%d9%84%d9%84%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa/
المكافآت والبرامج الولاء على 888starz تعزز فرص الربح وتضفي حماسة إضافية على اللعب, العروض الترويجية متجددة وتتيح للاعبين فرص ربح مستمرة وميزة السحب السريع, المحتوى التعليمي والإرشادي يساعد اللاعبين على فهم الألعاب وتحسين استراتيجياتهم
ШіШЄШ§Ш± 888 Щ„Щ„Щ…Ш±Ш§Щ‡Щ†Ш§ШЄ https://888starz-egypt-ar.com/
Kasyna w Polsce czesto oferuja vulkanspiele, ktore przenosza graczy w dynamiczny swiat lawy i wybuchow.
kasyno vulkan spiele https://vulkannclubs.com/
Wspolczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Specyficzna sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Kolejnym krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele logowanie https://amritawalia-art.com/2026/02/18/vulkan-spiele-polska-vulkanspiele-pl-online-2026/
يتضمن النص خطوات البدء والتسجيل في برنامج 888starz مع الالتزام بالإرشادات والشروط.
تحميل 888starz للايفون https://progress99.ru/888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-android-%d9%88ios-%d8%a8%d8%a3%d8%b3%d9%84%d9%88%d8%a8-%d9%85%d8%a8%d8%b3%d8%b7/
المكافآت والبرامج الولاء على 888starz تعزز فرص الربح وتضفي حماسة إضافية على اللعب, العروض الترويجية متجددة وتتيح للاعبين فرص ربح مستمرة وميزة السحب السريع, المحتوى التعليمي والإرشادي يساعد اللاعبين على فهم الألعاب وتحسين استراتيجياتهم
Щ…Ш±Ш§Щ‡Щ†Ш§ШЄ 888 https://888starz-egypt-ar.com/
W Polsce popularne sa kasyna online z motywem vulkanspiele, ktore zapewniaja intensywne doznania.
vulkan spiele logowanie https://vulkannclubs.com/
The author provides practical suggestions for daily study, which are easy to implement and adhere to. CasinoScoresBigBaller These suggestions make daily study more efficient and effective.
Aktualne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Wulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsza kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Nastepnie krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkan spiele casino opinie https://chiropractorcpt.com/vulkan-spiele-polska-vulkanspiele-platforma-online/
يتناول القسم الثاني واجهة المستخدم والتجربة البصرية وكيفية الوصول إلى الألعاب والخدمات بسهولة.
لعبه 888starz https://learn2speakspanish.site/2025/08/14/888starz-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-apk-%d9%88%d9%86%d8%b3%d8%ae%d8%a9-ios-%d9%85%d8%b9-%d8%af%d9%84%d9%8a%d9%84-%d8%aa%d8%b4%d8%ba%d9%8a%d9%84-%d9%88%d8%a7%d8%b6%d8%ad/
Aktualne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Glowny aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Kolejnym krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
online kasyno vulkanspiele online kasyno vulkanspiele.
وختاماً، يبرز النص أهمية التطبيق المسؤول للاستمتاع الأمثل بتجربة برنامج 888starz وتقييمها دورياً.
لعبه 888starz https://learn2speakspanish.site/2025/08/14/888starz-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-apk-%d9%88%d9%86%d8%b3%d8%ae%d8%a9-ios-%d9%85%d8%b9-%d8%af%d9%84%d9%8a%d9%84-%d8%aa%d8%b4%d8%ba%d9%8a%d9%84-%d9%88%d8%a7%d8%b6%d8%ad/
Nowoczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Glowny aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsze kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Istotnym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Potem krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele casino online https://realtalk-studio.com/vulkan-spiele-2026-polska-vulkanspiele-casino/
يبدأ الحديث بتحديد ماهية برنامج 888starz وكيف يعمل بالضبط داخل المنصة الرقمية.
تنزيل برنامج 888starz https://rlphealing.com/888starz-apk-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-%d9%84%d9%84%d8%a3%d9%86%d8%af%d8%b1%d9%88%d9%8a%d8%af-%d9%85%d8%b9-%d8%b4%d8%b1%d8%ad-%d9%83%d8%a7%d9%85%d9%84/
888starz предлагает широкий выбор игр, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Компания обеспечила соответствие международным стандартам безопасности.
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Процесс верификации не доставляет сложностей и занимает короткое время, . Сервис обеспечивает быстрые выплаты и богатый выбор развлечений. Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Игровые автоматы отличаются захватывающим дизайном и показательными бонусами. Раздел настольных игр на платформе также обширен: рулетка, блэкджек, бинго и прочие варианты, .
start 888 https://888starzuzz.com/
Wspolczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Kluczowym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Kolejnym krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Swietnie jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele 2026 https://consultectreinamentos.com.br/vulkanspiele-2026-polska-vulkan-spiele-strona-online/
يستعرض القسم الأول أهداف المنصة وقيمها الأساسية في توفير تجربة آمنة وممتعة.
تطبيق 888starz https://aguasdehispania.com/%d8%aa%d8%ad%d9%85%d9%8a%d9%84-888starz-apk-%d9%84%d9%84%d8%a3%d9%86%d8%af%d8%b1%d9%88%d9%8a%d8%af-%d9%88%d9%86%d8%b3%d8%ae%d8%a9-ios-%d9%85%d8%b9-%d8%b4%d8%b1%d8%ad-%d8%aa%d8%ab%d8%a8%d9%8a/
Wspolczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsza kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Kolejnym krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce potem mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele login https://1beautyplus.com/vulkan-spiele-polska-vulkanspiele-casino-online-pl-2026/?p=18432/
يغطي القسم الثالث نطاق الألعاب وتشكيلة الخيارات التي تتيحها المنصة للمستخدمين.
888starz ios https://gasbillcheckonline.com/%d8%a8%d8%b1%d9%86%d8%a7%d9%85%d8%ac-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%88%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-%d8%a7%d9%84%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-android-%d9%88ios-%d9%85%d9%88/
تجربة المستخدم على 888starz سهلة وبديهية مع واجهة عربية واضحة وتصفح سلس للمبتدئين, منصة 888starz تقدم دعمًا فنيًا باللغة العربية وخدمات مساعدة سريعة عبر الدردشة الحية والبريد الإلكتروني, خيارات الدفع متاحة ومتعددة وتدعم التحويلات المحلية والدولية بكل أمان
ШЄШЩ…ЩЉЩ„ 888starz https://888starz-egypt-ar.com/apk/
W Polsce popularne sa kasyna online z motywem vulkanspiele, ktore zapewniaja intensywne doznania.
vulkanspiele kody bonusowe https://vulkannclubs.com/kod-promocyjny/
посмотреть на этом сайте kraken актуальные ссылки
Wspolczesne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Wulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Aura Vulkan sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsza kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Kolejnym krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele 2026 https://leefairshare.org/vulkan-spiele-pl-vulkanspiele-oficjalna-strona-2026/
يشرح المقال خطوات التسجيل الأولي وكيفية البدء في تجربة برنامج 888starz مع مراعاة الشروط.
تحميل 888starz للايفون https://marrakechmaadine.com/%d9%84%d8%b9%d8%a8%d9%87-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%88%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-%d8%a7%d9%84%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-%d9%84%d9%84%d9%87%d9%88%d8%a7%d8%aa%d9%81/
Aktualne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Wulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Na poczatku kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Potem krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Po krotkiej chwili mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
online casino vulkanspiele https://subhaitsolution.com/2026/02/18/vulkan-spiele-polska-vulkanspiele-online-casino-2026/
يختم القسم الرابع بتفصيل إجراءات الحماية والتدابير الوقائية التي تضمن حماية المستخدمين.
888starz تنزيل https://candycosmetics.net/%d9%88%d9%83%d9%8a%d9%84-888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d8%a7%d9%84%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-%d9%85%d8%b9-%d8%af%d8%b9%d9%85-%d8%a7%d9%84%d9%86%d8%b8%d8%a7%d9%85%d9%8a%d9%86-a/
Kasyna w Polsce czesto oferuja vulkanspiele, ktore przenosza graczy w dynamiczny swiat lawy i wybuchow.
vulkan spiele https://vulkannclubs.com/
888starz كازينو في مصر يقدم تجربة لعب شاملة تجمع بين الأمان والتنوع والترفيه, 888starz كازينو في مصر يوفر مجموعة ألعاب واسعة وآمنة لجميع اللاعبين, 888starz كازينو في مصر يضمن دعمًا متواصلًا وخيارات دفع موثوقة بما يتناسب مع الثقافة المصرية
star888 https://888starz-egypt-ar.com/
يختم القسم الرابع بتفصيل إجراءات الحماية والتدابير الوقائية التي تضمن حماية المستخدمين.
تحميل 888starz للاندرويد https://vpkrubber.com/%d8%a8%d8%b1%d9%86%d8%a7%d9%85%d8%ac-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%88%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-%d8%a7%d9%84%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-android-%d9%88ios-%d9%85%d9%88/
Aktualne uvula temat ten przyciaga uwage wielu graczy, ktorzy szukaja bezpiecznych i rozbudowanych platform do zabawy. Vulkan aspekt to przede wszystkim dostepnosc gier, ktore lacza wysoka jakosc grafiki z plynna rozgrywka. Wulkaniczne sila tej marki polega na roznorodnosci tytulow, od klasycznych slotow po nowoczesne automaty z interaktywnymi funkcjami.
Dla poczatkujacych uzytkownikow kluczowe jest zrozumienie, jak dziala vulkan spiele casino polska i jak rozpoczac gre w bezpieczny sposob. Pierwsze kroki obejmuja rejestracje na platformie, weryfikacje konta oraz wybor preferowanych metod platnosci. Waznym elementem jest rowniez zapoznanie sie z regulaminem i polityka prywatnosci, aby uniknac nieprzyjemnych niespodzianek. Kolejnym krokiem jest zrozumienie zasad bonusow, ktore czesto towarzysza uruchomieniu konta. Warto jest skonsultowac sie z obsluga klienta w razie pytan, poniewaz profesjonalne doradztwo zwieksza komfort gry. Wkrotce mozna przetestowac darmowe tryby i dopasowac ustawienia do swoich preferencji.
vulkanspiele pl https://salcedoauctions.com/game/game/vulkanspiele-polska-vulkan-spiele-pl-2026/
Wulkaniczne motywy dominuja w polskich kasynach online, gdzie gracze szukaja niezwyklych doswiadczen.
vulkan spiele kody https://vulkannclubs.com/kod-promocyjny/
تجربة المستخدم على 888starz سهلة وبديهية مع واجهة عربية واضحة وتصفح سلس للمبتدئين, منصة 888starz تقدم دعمًا فنيًا باللغة العربية وخدمات مساعدة سريعة عبر الدردشة الحية والبريد الإلكتروني, خيارات الدفع متاحة ومتعددة وتدعم التحويلات المحلية والدولية بكل أمان
888 https://888starz-egypt-ar.com/
Сейчас многие говорят, что ПФ — ключевой фактор. Вот статья, где объясняют, как это вообще работает: https://spark.ru/user/268812/blog/315064/nakrutka-pf-v-yandeks-polnoe-rukovodstvo
Удобная платформа 888starz привлекает многих любителей азартных развлечений. В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Компания обеспечила соответствие международным стандартам безопасности.
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Процесс верификации прост и позволяет начать играть в считанные минуты, . Сервис обеспечивает быстрые выплаты и богатый выбор развлечений. Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . Коллекция настольных игр на сайте богата разными вариациями классических развлечений.
888starz apk ios https://888starzuzz.com/apk/
Похоже, сейчас без SMM вообще никуда — вот ещё один вариант, что нашёл: https://iwatt24.ru/uslugi-smm/
888starz предлагает широкий выбор игр, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Сервис снабжен лицензией и контролируется надёжными органами, .
Гражданам Узбекистана доступна быстрая регистрация на ресурсе 888starz. Верификация проходит быстро, что дает возможность сразу пополнить счёт. Сервис обеспечивает быстрые выплаты и богатый выбор развлечений. Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . Коллекция настольных игр на сайте богата разными вариациями классических развлечений.
8888 starz skachat 8888 starz skachat.
Казино 888starz радует игроков разнообразием слот-автоматов, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Компания обеспечила соответствие международным стандартам безопасности.
Гражданам Узбекистана доступна быстрая регистрация на ресурсе 888starz. Процесс верификации прост и позволяет начать играть в считанные минуты, . Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Слот-автоматы на 888starz представлены крупными студиями и независимыми разработчиками, . Слоты радуют яркой графикой, бонусными режимами и шансами на джекпот, . В разделе настольных игр встречаются рулетка, блэкджек, баккара и другие варианты, .
888star https://888starzuzz.com/
888starz предлагает широкий выбор игр, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Процесс верификации не доставляет сложностей и занимает короткое время, . Преимущества платформы включают мгновенные выплаты и широкий ассортимент игр, . Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . Раздел настольных игр на платформе также обширен: рулетка, блэкджек, бинго и прочие варианты, .
starz888 login https://888starzuzz.com/
Kasyna w Polsce czesto oferuja vulkanspiele, ktore przenosza graczy w dynamiczny swiat lawy i wybuchow.
vulkanspiele kasyno https://vulkannclubs.com/
888starz كازينو في مصر يقدم تجربة لعب شاملة تجمع بين الأمان والتنوع والترفيه, 888starz كازينو في مصر يوفر مجموعة ألعاب واسعة وآمنة لجميع اللاعبين, 888starz كازينو في مصر يضمن دعمًا متواصلًا وخيارات دفع موثوقة بما يتناسب مع الثقافة المصرية
ШЄШЩ…ЩЉЩ„ ШЁШ±Щ†Ш§Щ…Ш¬ Ш§Щ„Щ…Ш±Ш§Щ‡Щ†Ш§ШЄ 888 https://888starz-egypt-ar.com/apk/
article https://tornadocash.app
Удобная платформа 888starz привлекает многих любителей азартных развлечений. В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Верификация проходит быстро, что дает возможность сразу пополнить счёт. Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Слоты радуют яркой графикой, бонусными режимами и шансами на джекпот, . В разделе настольных игр встречаются рулетка, блэкджек, баккара и другие варианты, .
888starz официальный сайт скачать https://888starzuzz.com/apk/
browse this site https://anycoindirect.me
redirected here https://bitmix.app
find out here now https://daobase.info
try this web-site https://swaplab.io/
view publisher site https://letsexchange.cc/
Resources https://daobase.info
why not look here https://swaplab.io/
their explanation https://swaplab.io
look these up https://letsexchange.cc/
Find Out More https://daobase.info/
Our site https://anycoindirect.me
Казино 888starz радует игроков разнообразием слот-автоматов, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Сервис снабжен лицензией и контролируется надёжными органами, .
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Процесс верификации не доставляет сложностей и занимает короткое время, . Преимущества платформы включают мгновенные выплаты и широкий ассортимент игр, . Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . Раздел настольных игр на платформе также обширен: рулетка, блэкджек, бинго и прочие варианты, .
starz888 login starz888 login.
click for source https://daobase.io
her comment is here https://letsexchange.cc/
web link https://swaplab.io/
Kasyna w Polsce czesto oferuja vulkanspiele, ktore przenosza graczy w dynamiczny swiat lawy i wybuchow.
vulkanspiele pl https://vulkannclubs.com/
تجربة المستخدم على 888starz سهلة وبديهية مع واجهة عربية واضحة وتصفح سلس للمبتدئين, منصة 888starz تقدم دعمًا فنيًا باللغة العربية وخدمات مساعدة سريعة عبر الدردشة الحية والبريد الإلكتروني, خيارات الدفع متاحة ومتعددة وتدعم التحويلات المحلية والدولية بكل أمان
888 https://888starz-egypt-ar.com/
discover this info here https://bitmix.app/
discover this info here https://daobase.io/
Homepage https://swaplab.io
see this here https://swaplab.io
check this https://daobase.info/
Казино 888starz радует игроков разнообразием слот-автоматов, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
Гражданам Узбекистана доступна быстрая регистрация на ресурсе 888starz. Процесс верификации не доставляет сложностей и занимает короткое время, . Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . Коллекция настольных игр на сайте богата разными вариациями классических развлечений.
88star https://888starzuzz.com/
Wulkaniczne motywy dominuja w polskich kasynach online, gdzie gracze szukaja niezwyklych doswiadczen.
vulkanspiele aktionscode https://vulkannclubs.com/kod-promocyjny/
browse this site https://mixmy.money/
المكافآت والبرامج الولاء على 888starz تعزز فرص الربح وتضفي حماسة إضافية على اللعب, العروض الترويجية متجددة وتتيح للاعبين فرص ربح مستمرة وميزة السحب السريع, المحتوى التعليمي والإرشادي يساعد اللاعبين على فهم الألعاب وتحسين استراتيجياتهم
ЩѓШ§ШІЩЉЩ†Щ€ 888 ШЄШіШ¬ЩЉЩ„ Ш§Щ„ШЇШ®Щ€Щ„ https://888starz-egypt-ar.com/
check here https://anycoindirect.me/
his response https://mixmy.money
additional info https://anycoindirect.me
you could try here https://mixmy.money/
click this link here now https://bitmix.app
try these out https://daobase.online/
his comment is here https://tornadocash.app
right here https://daobase.info
Related Site https://swaplab.io/
helpful site https://mixmy.money
webpage https://anycoindirect.me/
learn the facts here now https://daobase.info/
have a peek at these guys https://letsexchange.cc
review https://daobase.info/
Source https://daobase.online/
her response https://swaplab.io
you can try here https://bitmix.app
click this https://yomix.biz
Click Here https://anycoindirect.me
see here now https://swaplab.io
Click This Link https://anycoindirect.me
like it https://bitmix.app
review https://letsexchange.cc/
888starz предлагает широкий выбор игр, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Сервис снабжен лицензией и контролируется надёжными органами, .
В Узбекистане жители получают доступ к регистрации на 888starz с минимальными требованиями, . Процесс верификации не доставляет сложностей и занимает короткое время, . Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . В разделе настольных игр встречаются рулетка, блэкджек, баккара и другие варианты, .
bonus 888starz https://888starzuzz.com/promo-code/
click this over here now https://daobase.info
check https://mixmy.money/
get more https://yomix.biz
you could check here https://daobase.io/
helpful site https://letsexchange.cc
888starz предлагает широкий выбор игр, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
Гражданам Узбекистана доступна быстрая регистрация на ресурсе 888starz. Процесс верификации прост и позволяет начать играть в считанные минуты, . Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Слоты радуют яркой графикой, бонусными режимами и шансами на джекпот, . Коллекция настольных игр на сайте богата разными вариациями классических развлечений.
888starz apk download https://888starzuzz.com/apk/
useful content https://daobase.online
like this https://mixmy.money
Recommended Reading https://mixmy.money/
go https://swaplab.io
Казино 888starz радует игроков разнообразием слот-автоматов, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Верификация проходит быстро, что дает возможность сразу пополнить счёт. Сервис обеспечивает быстрые выплаты и богатый выбор развлечений. Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . Коллекция настольных игр на сайте богата разными вариациями классических развлечений.
888 старс официальный сайт https://888starzuzz.com/
browse around this web-site https://tornadocash.app/
view https://daobase.online
useful site https://swaplab.io/
click here for more https://mixmy.money
her explanation https://daobase.io
blog link https://yomix.biz
Tried it but not gonna make a big deal about it yet, the site seems ok so far like the layout is clean and everything loads fine, gonna give it more time before i form any real opinions about weather its actually worth sticking with, u win game is teh link if ur curious i guess
click for more info https://mixmy.money/
check these guys out https://tornadocash.app
her explanation https://swaplab.io
Web Site https://daobase.online/
check this https://daobase.online/
click here to investigate https://tornadocash.app
Между прочим, если вас интересует скачать вавада играть на деньги, посмотрите сюда. Ссылка ниже: https://2026vavada.com/
my latest blog post https://swaplab.io
see here now https://daobase.io
reference https://anycoindirect.me/
go to website https://yomix.biz/
linked here https://daobase.io
Continued https://tornadocash.app/
Get the facts https://swaplab.io/
see here now https://swaplab.io
go to the website https://yomix.biz
useful source https://daobase.io
try this site https://letsexchange.cc
Удобная платформа 888starz привлекает многих любителей азартных развлечений. В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Сервис снабжен лицензией и контролируется надёжными органами, .
Гражданам Узбекистана доступна быстрая регистрация на ресурсе 888starz. Верификация проходит быстро, что дает возможность сразу пополнить счёт. Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Игровые автоматы отличаются захватывающим дизайном и показательными бонусами. Раздел настольных игр на платформе также обширен: рулетка, блэкджек, бинго и прочие варианты, .
888 skachat https://888starzuzz.com/apk/
navigate here https://mixmy.money
he said https://yomix.biz
article source https://yomix.biz
click here now https://daobase.online/
special info https://letsexchange.cc/
Extra resources https://letsexchange.cc/
check my reference https://bitmix.app/
great post to read https://bitmix.app/
visit homepage https://anycoindirect.me
get redirected here https://yomix.biz/
go to the website https://letsexchange.cc/
useful source https://daobase.online/
This Site https://daobase.info/
you could try these out https://daobase.io
review https://tornadocash.app
moved here https://daobase.online
Казино 888starz радует игроков разнообразием слот-автоматов, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Компания обеспечила соответствие международным стандартам безопасности.
Гражданам Узбекистана доступна быстрая регистрация на ресурсе 888starz. Верификация проходит быстро, что дает возможность сразу пополнить счёт. Сервис обеспечивает быстрые выплаты и богатый выбор развлечений. Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Слоты радуют яркой графикой, бонусными режимами и шансами на джекпот, . Коллекция настольных игр на сайте богата разными вариациями классических развлечений.
888starz kirish 888starz kirish.
company website https://jaxx-web.org/
Удобная платформа 888starz привлекает многих любителей азартных развлечений. В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
Гражданам Узбекистана доступна быстрая регистрация на ресурсе 888starz. Процесс верификации не доставляет сложностей и занимает короткое время, . Сервис обеспечивает быстрые выплаты и богатый выбор развлечений. Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . Раздел настольных игр на платформе также обширен: рулетка, блэкджек, бинго и прочие варианты, .
888statz https://888starzuzz.com/
click reference https://letsexchange.cc
site web https://daobase.io/
see here now https://letsexchange.cc/
try this https://toast-wallet.net/
Казино 888starz радует игроков разнообразием слот-автоматов, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Сервис снабжен лицензией и контролируется надёжными органами, .
В Узбекистане жители получают доступ к регистрации на 888starz с минимальными требованиями, . Процесс верификации прост и позволяет начать играть в считанные минуты, . Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Игровые автоматы отличаются захватывающим дизайном и показательными бонусами. Коллекция настольных игр на сайте богата разными вариациями классических развлечений.
888starz.bet 888starz.bet.
like it https://tornadocash.app
try this web-site https://daobase.io/
look at here now https://letsexchange.cc/
their website https://yomix.biz/
why not try this out https://yomix.biz
Our site https://yomix.biz
Удобная платформа 888starz привлекает многих любителей азартных развлечений. В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Сервис снабжен лицензией и контролируется надёжными органами, .
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Верификация проходит быстро, что дает возможность сразу пополнить счёт. Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . Раздел настольных игр на платформе также обширен: рулетка, блэкджек, бинго и прочие варианты, .
промокод на 888starz сегодня https://888starzuzz.com/promo-code/
try this web-site https://jaxx-web.org
check my blog https://swaplab.io
888starz предлагает широкий выбор игр, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
Гражданам Узбекистана доступна быстрая регистрация на ресурсе 888starz. Процесс верификации не доставляет сложностей и занимает короткое время, . Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Преимущества слотов включают яркую графику, множество бонусных функций и частые джекпоты, . Раздел настольных игр на платформе также обширен: рулетка, блэкджек, бинго и прочие варианты, .
8888 starz skachat https://888starzuzz.com/apk/
read what he said https://yomix.biz/
try these out https://toast-wallet.net/
useful site https://jaxx-web.org/
click for more https://daobase.online
reference https://jaxx-web.org/
check this site out https://toast-wallet.net/
This article provided exactly what I was looking for. Thank you for the great insight!
Удобная платформа 888starz привлекает многих любителей азартных развлечений. В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
Гражданам Узбекистана доступна быстрая регистрация на ресурсе 888starz. Процесс верификации не доставляет сложностей и занимает короткое время, . Преимущества платформы включают мгновенные выплаты и широкий ассортимент игр, . Абзац 2: Слот-автоматы на 888starz представлены крупными студиями и независимыми разработчиками, . Слоты радуют яркой графикой, бонусными режимами и шансами на джекпот, . В разделе настольных игр встречаются рулетка, блэкджек, баккара и другие варианты, .
promo code 888starz https://888starzuzz.com/promo-code/
helpful hints https://toast-wallet.net
Казино 888starz радует игроков разнообразием слот-автоматов, . В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Сервис снабжен лицензией и контролируется надёжными органами, .
Пользователи Узбекистана могут легко зарегистрироваться на сайте 888starz, . Верификация проходит быстро, что дает возможность сразу пополнить счёт. Основные плюсы сервиса — мгновенные выплаты и внушительный каталог игр, . Абзац 2: Коллекция слотов на сайте 888starz формируется ведущими студиями и независимыми разработчиками, . Слоты радуют яркой графикой, бонусными режимами и шансами на джекпот, . Коллекция настольных игр на сайте богата разными вариациями классических развлечений.
888starz registration https://888starzuzz.com/registration/
К слову, если вас интересует вавада vadaa online официальный сайт вход, посмотрите сюда. Вот, можете почитать: https://2026vavada.com/
navigate to this web-site https://jaxx-web.org/
Excellent content as always — useful, engaging, and well presented.
this website https://jaxx-web.org
i was reading this https://jaxx-web.org/
click for source https://jaxx-web.org/
click this site toast wallet download
pin up casino online https://school7-kirishi.ru
Удобная платформа 888starz привлекает многих любителей азартных развлечений. В рамках этой статьи мы рассмотрим, как онлайн-казино 888starz работает в Узбекистане и какие преимущества предоставляет раздел ставок на спорт 888starz. Платформа лицензирована и регулируется, .
В Узбекистане жители получают доступ к регистрации на 888starz с минимальными требованиями, . Процесс верификации не доставляет сложностей и занимает короткое время, . Сервис обеспечивает быстрые выплаты и богатый выбор развлечений. Абзац 2: Ассортимент слот-машин на 888starz насчитывает проекты от топовых и нишевых компаний. Игровые автоматы отличаются захватывающим дизайном и показательными бонусами. В разделе настольных игр встречаются рулетка, блэкджек, баккара и другие варианты, .
888starz скачать бесплатно https://888starzuzz.com/apk/
look at these guys https://jaxx-web.org
aliexpress промокод на скидку 2026 активные промокоды алиэкспресс
click here to read xrp wallet
find more information https://toast-wallet.net
navigate to these guys toast wallet app
Thanks for sharing such a clear and helpful article. It was a pleasure to read!
I love how you make complex topics easy to follow. Excellent work!
Very informative content — simple, well written, and easy to understand. Keep it up!
look at these guys https://toast-wallet.net/
Volvo в Україні https://telegra.ph/Kupit-spectehniku-Volvo-03-30 екскаватори, фронтальні навантажувачі та дорожні машини. Надійність, ефективність і сучасні рішення для будівництва. Продаж, підбір і обслуговування техніки для бізнесу.
фильмы смотреть онлайн 2026 кино топ
go to this web-site https://jaxx-web.org
I am glad to be one of the visitors on this great site (:, appreciate it for putting up.
pin-up казино играть pin up онлайн-казино
read review https://jaxx-web.org/
see here now https://toast-wallet.net
click resources toast wallet app
right here https://toast-wallet.net/
look at here https://jaxx-web.org/
see post jaxx
More Bonuses https://jaxx-web.org/
click here to find out more https://jaxx-web.org
check that toast wallet
browse around here https://jaxx-web.org/
click over here now https://jaxx-web.org/
directory https://jaxx-web.org
check over here jaxx
Clicking Here https://jaxx-web.org
Get the facts https://jaxx-web.org/
check it out https://jaxx-web.org/
check out here jax wallet
go to my blog https://toast-wallet.net/
you can look here https://toast-wallet.net
my website jaxx crypto
look at more info https://toast-wallet.net
read here https://jaxx-web.org
find this https://toast-wallet.net
resource https://jaxx-web.org/
get more https://toast-wallet.net/
navigate here toast wallet download
great site https://toast-wallet.net
recommended you read jaxx wallet
wikipedia reference toast wallet app
find out here https://toast-wallet.net/
Home Page https://jaxx-web.org/
go to this website https://toast-wallet.net
top article jaxx crypto
More Bonuses toast wallet download
their website https://jaxx-web.org/
these details https://jaxx-web.org/
get more https://jaxx-web.org/
company website https://jaxx-web.org/
you can try these out https://jaxx-web.org
this website https://toast-wallet.net/
see here now https://jaxx-web.org/
view website https://jaxx-web.org/
additional reading jax wallet
site link toast wallet download
great site https://jaxx-web.org/
i was reading this https://jaxx-web.org
visit this site right here https://jaxx-web.org
click this link now https://jaxx-web.org/
view publisher site https://jaxx-web.org
original site https://jaxx-web.org
visit this site right here https://jaxx-web.org
YOURURL.com jaxx wallet
browse this site https://jaxx-web.org/
her comment is here https://jaxx-web.org/
read here https://toast-wallet.net
he said https://jaxx-web.org/
Visit Your URL https://jaxx-web.org/
special info https://jaxx-web.org/
my explanation toast wallet passphrase
this hyperlink https://jaxx-web.org
try this site toast wallet passphrase
from this source https://jaxx-web.org/
you could look here https://jaxx-web.org
site web toast wallet download
see post https://jaxx-web.org
anonymous https://jaxx-web.org/
go to this site https://jaxx-web.org/
Read Full Article https://jaxx-web.org/
browse around this web-site https://jaxx-web.org/
he said https://toast-wallet.net/
browse around these guys https://jaxx-web.org
click this site jaxx
other https://toast-wallet.net
this link https://toast-wallet.net/
site here https://jaxx-web.org/
visit the site https://jaxx-web.org/
why not find out more https://toast-wallet.net
click for more info jaxx
click to find out more https://jaxx-web.org/
official site jaxx
my company toast wallet passphrase
here are the findings https://jaxx-web.org/
this contact form jaxx wallet
this link jaxx
blog link https://toast-wallet.net
Click Here https://jaxx-web.org
from this source jaxx liberty wallet
you could check here https://jaxx-web.org
this article toast wallet passphrase
best site jax wallet
home https://jaxx-web.org
important source https://toast-wallet.net
Recommended Reading xrp wallet
basics https://jaxx-web.org
click to investigate jaxx crypto
Well done! The structure and clarity of your writing make it a great read.
pop over to this web-site https://jaxx-web.org
redirected here toast wallet app
check that toast wallet
over here toast wallet app
this content https://toast-wallet.net/
check https://toast-wallet.net
his response https://jaxx-web.org/
website link https://jaxx-web.org/
click to read https://jaxx-web.org/
from this source https://jaxx-web.org
explanation https://jaxx-web.org/
find https://jaxx-web.org
look here https://jaxx-web.org/
helpful resources https://jaxx-web.org
special info https://jaxx-web.org
read the article jaxx
pop over here toast wallet passphrase
useful link toast wallet app
why not check here https://jaxx-web.org/
his explanation toast wallet passphrase
click for source https://toast-wallet.net/
check here https://toast-wallet.net/
check out this site https://jaxx-web.org/
click here now https://jaxx-web.org/
discover this info here jaxx liberty wallet
Go Here jaxx liberty wallet
Find Out More jaxx wallet
useful content https://jaxx-web.org/
click reference jaxx wallet
click resources https://jaxx-web.org
view website https://toast-wallet.net/
redirected here https://toast-wallet.net/
pop over to this site https://toast-wallet.net/
look at here toast wallet recovery
try this https://toast-wallet.net
index https://jaxx-web.org/
read what he said jaxx liberty
check my blog toast wallet passphrase
address https://jaxx-web.org/
click site jaxx liberty
see post toast wallet
helpful resources https://toast-wallet.net
Коллеги, нашёл кейс про SEO для местной сети кафе в Екатеринбурге. ITB Company помогла поднять сайт на 30 позиций за три месяца, трафик вырос на 150%, а реальных посетителей стало на 40% больше. В статье подробно расписано, за счёт чего это получилось: скорость загрузки, адаптивный дизайн, уникальный контент. Полезно: https://drivetvchannel.ru/stati/kak-seo-prodvizhenie-s-itb-company-pomogaet-biznesu-ekaterinburga-rasti/
web https://jaxx-web.org/
Continue https://jaxx-web.org
this hyperlink https://jaxx-web.org/
this https://toast-wallet.net/
Find Out More https://jaxx-web.org/
browse this site https://toast-wallet.net/
content jaxx liberty
find out this here https://jaxx-web.org
check this https://jaxx-web.org/
this hyperlink xrp wallet
Get the facts toast wallet passphrase
recommended you read https://jaxx-web.org/
click for more info https://jaxx-web.org
find out https://jaxx-web.org
top article https://jaxx-web.org
find this toast wallet passphrase
websites https://jaxx-web.org/
check out the post right here https://jaxx-web.org
go to my blog https://jaxx-web.org
more tips here https://jaxx-web.org
her response xrp wallet
visit this page https://jaxx-web.org/
read this article https://jaxx-web.org
this website https://jaxx-web.org/
view website https://toast-wallet.net/
Extra resources jaxx liberty wallet
additional resources https://jaxx-web.org
click to find out more https://jaxx-web.org
i thought about this https://jaxx-web.org/
helpful site toast wallet
site web toast wallet download
click reference toast wallet passphrase
сайт https://www.google.com.bd/url?sa=t&rct=j&q=&esrc=s&source=web&cd=3&cad=rja&ved=0CEAQFjAC&url=https://letundra.com/ru/news/?taglist=gvineya-bisau,viza
visit this site jax wallet
читать https://www.google.ac/url?q=https://www.vtt.ru/catalog/cet/cet-prochee-printery/Kyocera-Mita-CET311017/
веб-сайте http://www.google.fm/url?q=https://letundra.com/es/news/?taglist=mula-2
нажмите https://images.google.co.zw/url?q=https://letundra.com/es/news/?taglist=aeropuerto-francisco-sa-carneiro-de-oporto-opo,espana
опубликовано здесь https://maps.google.co.bw/url?q=https://travelanswer.ru/flights/from-makhachkala-to-saratov.html
Дизайн человека
узнать больше https://images.google.se/url?q=https://travelanswer.ru/questions/povrezhdenniy-pasport-rf-dlya-poezdki-v-kazahstan-mozhno-li-peresekaty-granitsu.html
содержание https://www.google.com.ph/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&uact=8&ved=0ahUKEwjAotHevcDRAhWCS7wKHRYDAMwQjRwIBw&url=https://letundra.com/ru/news/?taglist=armeniya,klivlend
find out here jaxx
сюда https://images.google.com.ar/url?q=https://letundra.com/ru/news/?taglist=latam,tap-air-portugal
reference https://jaxx-web.org/
Get the facts jaxx wallet
Читать далее https://www.google.be/url?q=https://travelanswer.ru/questions/chto-budet-esli-ne-vovremya-zabraty-iz-migratsii-kartu-vnzh-v-bolgarii-posle-prodleniya.html
Подробнее http://www.google.la/url?id=wyogwituxwqc&pg=pa222&q=https://letundra.com/en/news/?taglist=bangkok-2,sapporo-new-chitose-airport-cts
Important: stick with one method for deposits and withdrawals — casinos won’t let you mix for anti-fraud reasons.
jetton в телеграмме
такой http://images.google.bg/url?q=https://ekaterinburg.protos.ru/catalog/item/chast-knopki-ustanovochnoi-tip-kolczo-chernenyi-14mm-1012-13
перейдите на этот сайт https://www.google.com.pk/url?sa=t&rct=j&q=&esrc=s&source=web&cd=14&ved=0CGAQFjAN&url=https://letundra.com/en/news/?taglist=israel,thessaloniki
узнать больше Здесь https://www.google.me/url?q=https://travelanswer.ru/flights/from-mirnyj-to-dushanbe.html
другие https://maps.google.cd/url?q=https://letundra.com/es/news/?taglist=american-airlines,napoles
другие https://www.google.mk/url?q=https://letundra.com/ru/news/?taglist=hanchzhou,tokio
узнать больше https://www.google.com.ly/url?sa=t&rct=j&q&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0CCgQtwIwAA&url=https://letundra.com/es/news/?taglist=condor-airlines,papeete-2
сайт https://images.google.com.pk/url?q=https://letundra.com/en/news/?taglist=damascus,sochi-2
на этом сайте http://www.google.so/url?q=https://rostov-na-donu.protos.ru/catalog/item/polukolczo-chernenyi-20mm-53017
Продолжение http://maps.google.com.au/url?q=https://kazan.protos.ru/catalog/item/kant-vitoi-korichnevyi-9mm-23-103-r-9035
Смотреть здесь http://www.google.com.et/url?q=https://travelanswer.ru/questions/kak-kupity-bileti-na-poezda-v-yaponii-onlayn-kioto-osaka-i-drugie-marsruti.html
этот сайт http://www.google.com.om/url?sa=t&source=video&cd=8&ved=0CEkQtwIwBw&url=https://letundra.com/es/news/?taglist=caribenos,connecticut
продолжить http://images.google.lk/url?q=https://www.vtt.ru/catalog/hi-black/hi-black-zapravochnye-komplekty-chernila/Canon-1507010803/
этот сайт http://images.google.com.mt/url?q=https://letundra.com/en/news/?taglist=jeddah,venice
подробнее здесь https://images.google.com.ph/url?q=https://letundra.com/en/news/?taglist=air-arabia,maldives
этот контент https://www.google.md/url?q=https://travelanswer.ru/questions/kak-popolnity-transportnuyu-kartu-stambula-melkimi-kupyurami-prakticheskie-soveti.html
узнать больше https://www.google.com.tw/url?q=https://letundra.com/es/news/?taglist=promociones,servicio
перенаправляется сюда https://maps.google.com.bn/url?q=https://hi-black.ru/catalog/zapchasti_dlya_kartridzhey/doziruyushchee_lezvie_hi_black_c3906a_dlya_hp_lj_5l_6l_1100_ax/
Sufit napinany dobrze sprawdza się w domu i biurze. Taki wybór sprawdza się przy szybkiej metamorfozie wnętrza. Dostępne są warianty PVC oraz tkaninowe, dlatego wiele osób decyduje się na taki montaż https://sufity-napinane-wroclaw.pl/
интернет https://www.google.com.uy/url?q=https://letundra.com/ru/news/?taglist=ajet,erdzhan
Источник http://maps.google.com.bn/url?q=https://blkrip.vip/services/vfx/
посмотреть в этом разделе http://maps.google.com.ag/url?q=https://letundra.com/ru/news/?taglist=aeroport-imeni-ben-guriona,moskva
продолжить https://images.google.dk/url?q=https://letundra.com/es/news/?taglist=atenas,british-airways
проверить сайт https://www.google.com.vn/url?q=https://barnaul.protos.ru/catalog/item/pugovicza-dzhinsovaya-latunzoloto-14mm-64057
смотреть здесь https://images.google.com.do/url?q=https://chelyabinsk.protos.ru/catalog/item/zastezhka-molniya-traktornaya-arta-chernyi-80sm-60-20766-80580
смотреть здесь http://www.google.com.ph/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0CCUQFjAA&url=https://letundra.com/en/news/?taglist=himalaya-airlines,nepal-2
ссылка на сайт http://maps.google.lu/url?q=https://letundra.com/es/news/?taglist=sidney,singapore-airlines
нажмите здесь https://www.google.com.jm/url?q=https://barnaul.protos.ru/catalog/item/zazhim-metallicheskii-serebro-d-45mm-69662
такой https://www.google.co.ve/url?sa=t&rct=j&q=&esrc=s&source=web&cd=11&cad=rja&uact=8&ved=0ahUKEwjy2qzA5-3NAhXL6iYKHVSODXU4ChAWCBswAA&url=https://letundra.com/ru/news/?taglist=indiya,sula-vineyards
подробнее https://images.google.com.lb/url?q=https://nn.protos.ru/catalog/item/lenta-okantovochnaya-belyi-32mm-77-0432abel
перейдите на этот сайт https://maps.google.nr/url?q=https://letundra.com/en/news/?taglist=discounts,pegasus-airlines
подробнее http://maps.google.pt/url?q=https://letundra.com/en/news/?taglist=american-airlines,promotions
Следующая страница http://maps.google.com.sv/url?q=https://rostov-na-donu.protos.ru/catalog/item/shnur-kozhzam-serebro-10mm-04-12342
найти это https://images.google.sr/url?q=https://blkrip.vip/zh/services/sound-design/
Перейти на сайт http://maps.google.co.zw/url?q=https://yakutsk.protos.ru/catalog/item/shnur-dlya-vozdushnyx-petel-sinii-2mm-07-402301-16
веб-сайте http://www.google.com.sg/url?q=https://yakutsk.protos.ru/catalog/item/knopka-alfa-omega-belyi-18mm-1621
содержание https://maps.google.tk/url?q=https://letundra.com/es/news/?taglist=italia,transporte-publico
Узнать больше http://maps.google.is/url?q=https://letundra.com/en/news/?taglist=czech-republic,finland
подробнее здесь http://www.google.com.gh/url?q=https://protos.ru/catalog/item/nitki-shveinye-big-5000-yard-bordovyi-402-40-0068
здесь http://images.google.com.do/url?q=https://letundra.com/en/news/?taglist=biberi-2,united-kingdom
веб-сайте https://www.google.com.py/url?q=https://letundra.com/en/news/?taglist=albania,canada
читать http://www.google.com.sg/url?sa=t&rct=j&q=&esrc=s&source=web&cd=5&cad=rja&uact=8&ved=0CDUQFjAE&url=https://letundra.com/ru/news/?taglist=kanarskie-ostrova,yurmala
ссылка на сайт https://images.google.com.ni/url?q=https://letundra.com/ru/news/?taglist=melburn,yuzhnaya-koreya
Следующая страница http://images.google.com.gh/url?q=https://travelanswer.ru/questions/otkaz-v-vize-k-eta-yuzhnoy-korei-dvazhdi-stoit-li-probovaty-v-tretiy-raz-posle-obnovleniya-pasporta.html
посмотреть на этом сайте http://maps.google.com.ar/url?q=https://barnaul.protos.ru/catalog/item/molniya-dzhinsovaya-zolotoekryu-10sm-3901910
зайти на сайт http://maps.google.vu/url?q=https://letundra.com/en/news/?taglist=bangkok-2,brisbane
смотреть здесь https://maps.google.ge/url?q=https://deltabez.ru/stati/i-snova-o-firmah-odnodnevkah-ais-deltabezopasnost-38/
этот контент http://maps.google.com.bh/url?q=https://letundra.com/ru/news/?taglist=illinojs
выберите ресурсы http://maps.google.lv/url?q=https://letundra.com/ru/news/?taglist=aleksandriya,kuwait-airways
узнать больше http://www.google.bs/url?q=https://travelanswer.ru/questions/migratsionnie-kartochki-v-kitae-obyazatelyni-li-oni-dlya-vseh-turistov.html
перейти на сайт https://maps.google.co.nz/url?q=https://letundra.com/ru/news/?taglist=gvadalahara,monreal
каталог https://www.google.cat/url?sa=i&source=images&cd=&docid=rdsnzw-lze-hmm&tbnid=64z2jkmn5y-yim:&ved=0cacqjb04sae&url=https://letundra.com/es/news/?taglist=aeropuerto-internacional-de-ufa
посмотреть на этом сайте http://www.google.vg/url?q=https://letundra.com/ru/news/?taglist=air-france,rejsy
другие http://images.google.com.gi/url?q=https://letundra.com/en/news/?taglist=flights,the-d-i-mendeleev-roschino-international-airport
Следующая страница https://www.google.com.ng/url?q=https://travelanswer.ru/questions/karaoke-klubi-minska-s-tantspolom-gde-mozhno-i-spety-i-potantsevaty.html
сюда http://maps.google.lv/url?q=https://www.d-life.org/blog/chto-nuzhno-znat-pro-razrabotku-sayta.html
Главная http://www.google.com.bh/url?sa=t&rct=j&q=&esrc=s&source=web&cd=5&ved=0CDoQFjAE&url=https://travelanswer.ru/questions/gde-priobresti-transportnuyu-kartu-nol-dlya-avtobusov-v-dubae-proverennie-tochki-prodazh.html
Коллеги, кто ищет реальные кейсы по SEO в Екатеринбурге, обратите внимание на этот материал. Там рассказывают про опыт ITB Company: аудит, подбор ключей, ссылочную стратегию. Понравилось, что есть цифры — интернет-магазин одежды увеличил трафик на 150%, а консалтинговая компания — рост заявок на 200%. Почитайте: https://admtog.ru/stati/kak-seo-prodvizhenie-s-itb-company-pomogaet-biznesu-ekaterinburga-rasti/
здесь http://maps.google.si/url?q=https://letundra.com/ru/news/?taglist=aeroport-buenos-ajres-esejsa-eze,level
перейдите на этот сайт http://www.google.rw/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&ved=0ceeqfjab&url=https://protos.ru/catalog/item/lyuvers-ovalnyi-zoloto-10mm-51984
на этом сайте http://www.google.dm/url?q=https://travelanswer.ru/flights/from-osh-to-saint-petersburg.html
здесь http://www.google.com.eg/url?q=https://letundra.com/ru/news/?taglist=aeroport-imeni-benazir-bhutto-islamabad-isb,somon-air
содержание https://www.google.com.sv/url?sa=i&rct=j&esrc=s&source=images&cad=rja&uact=8&ved=0CAcQjRw&url=https://ufa.protos.ru/catalog/item/shnur-metallizirovannyi-zoloto-8mm-07-403803-zol-05
подробнее http://images.google.co.zw/url?q=https://volgograd.protos.ru/catalog/item/shnur-vyazanyi-sinii-5mm-61-22-652
узнать больше https://www.google.com.co/url?sa=t&rct=j&q=factor+quema+grasa&esrc=s&source=web&cd=1&cad=rja&ved=0ahUKEwjanbCFhP7LAhVE5GMKHWOeCukQFggaMAA&url=https://travelanswer.ru/questions/kakie-dni-v-saudovskoy-aravii-schitayutsya-vihodnimi-a-kakie-budnimi.html
этот сайт http://www.google.lk/url?sa=t&source=web&cd=2&ved=0ahUKEwio4vj95PrMAhUMrI8KHYkMDwwQFggjMAE&url=https://letundra.com/es/news/?taglist=aeropuerto-de-kuwait-kwi
смотреть здесь http://images.google.si/url?q=https://travelanswer.ru/questions/zakrity-firmu-ne-nulevku-s-direktorom-uletevshim-iz-chernogorii-eto-normalynaya-praktika.html
Подробнее здесь https://images.google.gm/url?q=https://letundra.com/en/news/?taglist=shanghai,usa
подробнее https://www.google.dm/url?q=https://travelanswer.ru/questions/kak-zakazaty-taksi-rano-utrom-na-granitsu-s-malayziey-proverennie-sposobi-i-soveti.html
этот сайт https://images.google.co.ve/url?q=https://letundra.com/es/news/?taglist=eventos,la-boca
Интернет магазин элитной парфюмерии предлагает как классические, так и современные композиции. Каждый покупатель может найти аромат, который подчеркнет его индивидуальность https://avon-forum.ru/
на этом сайте https://www.google.com.bo/url?sa=t&rct=j&q=como+curar+y+como+ganar&esrc=s&source=web&cd=1&cad=rja&ved=0ahUKEwiZwqzNg_7LAhVPy2MKHU7ZBHgQFggaMAA&url=https://ufa.protos.ru/catalog/item/ramka-regulirovochnaya-nikel-15mm-68152
веб-сайте http://images.google.by/url?q=https://protos.ru/catalog/item/tesma-repsovaya-ekryu-5mm-15-2500512-5202
опубликовано здесь https://images.google.com.my/url?q=https://travelanswer.ru/questions/samostoyatelynaya-poezdka-v-tropicheskiy-park-yalong-stoit-li-ehaty-samostoyatelyno-ili-luchshe-s-ekskursiey.html
Перейти на сайт https://www.google.ci/url?q=https://travelanswer.ru/questions/gde-vkusno-i-nedorogo-poobedaty-vozle-stantsii-metro-radzhiv-chouk-v-deli.html
нажмите здесь http://images.google.co.zm/url?q=https://letundra.com/ru/news/?taglist=belgrad,tivat
Перейти на сайт https://images.google.com.sb/url?q=https://letundra.com/en/news/?taglist=death-valley,usa
страница http://images.google.vu/url?q=https://travelanswer.ru/places/villa-shtuka.html
Подробнее http://www.google.fi/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&ved=0CCQQFjAA&url=https://travelanswer.ru/places/wat-phala.html
страница http://maps.google.com.bh/url?q=https://letundra.com/es/news/?taglist=fizuli-2,vuelos
нажмите, чтобы подробнее http://images.google.nl/url?q=https://travelanswer.ru/questions/osobennosti-oformleniya-vizi-v-kitay-pri-slozhnom-marshrute-s-tranzitom-cherez-gonkong.html
Подробнее http://www.google.by/url?q=https://travelanswer.ru/questions/kontsert-19-v-yuzhnoy-koree-pustyat-li-detey-s-vzroslimi.html
подробнее здесь https://maps.google.com.pe/url?q=https://travelanswer.ru/questions/bezvizoviy-vaezd-v-malayziyu-dlya-grazhdan-rf-osobennosti-i-nyuansi.html
подробнее http://maps.google.com.co/url?q=https://travelanswer.ru/questions/osobennosti-vecherney-poezdki-na-metro-iz-dubay-marini-v-dubay-moll-s-detskoy-kolyaskoy-i-bagazhom.html
Следующая страница http://images.google.al/url?q=https://letundra.com/es/news/?taglist=jiangxi-air
Продолжение http://www.google.ne/url?q=https://travelanswer.ru/questions/gde-vigodnee-snimaty-denygi-s-tayskoy-karti-krungsri-vo-vyetname.html
подробнее http://www.google.si/url?q=https://letundra.com/en/news/?taglist=cairo,kuwait
Узнать больше https://www.google.md/url?sa=f&rct=j&url=https://fabrica-tumana.ru/cheboksary/
как зарядить колонку через usb и usb разьем пошаговая инструкция
Перейти на сайт https://images.google.vu/url?q=https://letundra.com/ru/news/?taglist=koktebel
сюда https://www.google.at/url?sa=t&rct=j&q=&esrc=s&frm=1&source=web&cd=14&ved=0CFUQFjADOAo&url=https://fabrica-tumana.ru/tolyatti/catalog/ventilyaciya-ventilyacionnoe-oborudovanie/ventilyatory/
этот сайт http://www.google.com.co/url?sa=t&rct=j&q=&esrc=s&frm=1&source=web&cd=9&cad=rja&sqi=2&ved=0CEUQtwIwCA&url=https://protos.ru/catalog/item/zazhim-plastmassovyi-krasnyi-d-4mm-7092
найти это https://maps.google.bj/url?q=https://travelanswer.ru/questions/cto-delaty-esli-deti-ne-vpisani-v-pasport-no-viza-vo-vyetnam-odobrena.html
Узнать больше http://maps.google.co.tz/url?q=https://letundra.com/en/news/?taglist=madrid-barajas-airport-mad,portugal
зайти на сайт https://images.google.tm/url?q=https://letundra.com/es/news/?taglist=el-cairo,tanger
каталог http://maps.google.vg/url?q=https://letundra.com/es/news/?taglist=cancelaciones-de-vuelos,irkutsk-2
веб-сайте http://maps.google.com.ni/url?q=https://travelanswer.ru/questions/kakuyu-aviakompaniyu-vibraty-flyone-flyone-armenia-ili-transavia-pri-ravnoy-stoimosti-biletov.html
Подробнее http://images.google.com.cu/url?q=https://travelanswer.ru/questions/nuzhna-li-mestnaya-sim-karta-volna-dlya-tele2-v-sanatorii-nikolaevka-v-krimu-v-2024-godu.html
такой https://images.google.gy/url?q=https://travelanswer.ru/places/vsemirnoe-semenohranilishte.html
веб-сайте http://maps.google.co.zw/url?q=https://letundra.com/ru/news/?taglist=dominikanskaya-respublika,ekvador
каталог https://www.google.az/url?sa=t&rct=j&q=&esrc=s&source=web&cd=13&ved=0CHEQFjAM&url=https://fabrica-tumana.ru/blagoveshhensk/catalog/uvlazhniteli/dlya-derevyannogo-doma/
узнать больше Здесь http://images.google.bi/url?q=https://travelanswer.ru/places/la-rinconada-ecoparque-y-restaurante.html
нажмите, чтобы подробнее https://maps.google.vu/url?q=https://letundra.com/ru/news/?taglist=italiya,tunis
сайт https://www.google.la/url?q=https://letundra.com/en/news/visiting-mount-vottovaara-in-karelia-will-be-subject-to-a-fee-starting-march-1/
Следующая страница http://maps.google.co.ls/url?q=https://letundra.com/ru/news/?taglist=avialinii,dzhidda
посетить сайт http://images.google.com.om/url?q=https://travelanswer.ru/questions/kak-dobratysya-iz-tsentra-gdanyska-v-aeroport-hrabrovo-optimalynie-avtobusnie-marshruti.html
сюда http://images.google.tg/url?q=https://travelanswer.ru/questions/delayu-vizu-v-ispaniyu-v-ankete-bls-chto-pisaty-v-grafe-issue-place-mvd-ili-russian-federation.html
посмотреть на этом сайте http://www.google.ee/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&docid=2l_o-24g-_akkm&tbnid=wdqervrukes26m:&ved=0cacqjrw&url=https://soulcatering.ru/catalog/detskiy-sochnyy-mini-shashlychok-iz-kurinogo-file.html
ссылка на сайт https://images.google.ms/url?q=https://www.vtt.ru/catalog/cet/cet-bunkery-kontejnery-dlya-sbora-tonera-i-chernil/Konica%20Minolta-CET521030/
узнать больше Здесь https://images.google.ac/url?q=https://travelanswer.ru/questions/kak-organizovaty-romanticheskiy-uzhin-na-yahte-v-dubae-luchshie-vodnie-progulki-po-marina-moll.html
узнать больше http://maps.google.lk/url?q=https://barnaul.protos.ru/catalog/item/lenta-atlasnaya-zelenyi-6mm-15-7000618-5913
перенаправляется сюда http://maps.google.com.et/url?q=https://chelyabinsk.protos.ru/catalog/item/kant-fioletovyi-10mm-17-15019
нажмите, чтобы подробнее https://www.google.ci/url?q=https://letundra.com/ru/news/?taglist=goricziya,zhd
пояснения http://images.google.ba/url?q=https://letundra.com/en/news/?taglist=gatchina-2,russia
перенаправляется сюда https://maps.google.com.bh/url?q=https://travelanswer.ru/questions/dlya-chego-nuzhni-tsifri-v-pasporte-pri-vaezde-v-saudovskuyu-araviyu-po-vize.html
Смотреть здесь http://www.google.mk/url?q=https://letundra.com/ru/news/?taglist=tur
в этом разделе https://www.google.nl/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0CHIQFjAA&url=https://letundra.com/ru/news/?taglist=kotor
найти это https://image.google.bi/url?q=https://travelanswer.ru/questions/skolyko-v-dyutike-seychas-stoit-chivas-v-antalii.html
посетить сайт https://images.google.co.zm/url?q=https://letundra.com/en/news/?taglist=poland
кликните сюда http://images.google.lv/url?q=https://travelanswer.ru/location/india/ahmedabad
такой https://www.google.com.uy/url?sa=t&rct=j&q=gana+dinero+escribiendo&esrc=s&source=web&cd=1&cad=rja&ved=0ahUKEwjb8pzitqfPAhUM6yYKHRETAF0QFggcMAA&url=https://letundra.com/en/news/?taglist=chios-island,greece
страница https://maps.google.as/url?q=https://fabrica-tumana.ru/wp-sitemap-taxonomies-catalog_category__kazan-1.xml
сайт http://images.google.com.ly/url?q=https://travelanswer.ru/questions/kakie-voditelyskie-prava-nuzhni-turistam-iz-rossii-dlya-vozhdeniya-v-ssha.html
выберите ресурсы https://images.google.ge/url?q=https://letundra.com/en/news/frontier-airlines-will-launch-a-domestic-route-to-the-us-from-indianapolis-to-phoenix-on-march-24/
на этом сайте https://www.google.tt/url?sa=t&rct=j&q=&esrc=s&source=web&cd=31&cad=rja&uact=8&ved=0ccmqfjaaob4&url=https://letundra.com/en/news/from-april-1-uzbekistan-will-introduce-improvements-to-its-vat-refund-system-for-foreign-citizens/
выберите ресурсы http://www.google.to/url?q=https://yakutsk.protos.ru/catalog/item/knopka-sorochechnaya-zelenyi-10mm-0883
веб-сайте http://maps.google.co.kr/url?q=https://fabrica-tumana.ru/nizhnevartovsk/catalog/uvlazhniteli/s-kontrolem-vlazhnosti/
ссылка на сайт http://maps.google.ca/url?q=https://letundra.com/ru/news/?taglist=nassau-2,porter-airlines
каталог https://images.google.tg/url?q=https://travelanswer.ru/questions/kak-dobratysya-iz-selektuma-femeli-resort-kizilagach-do-novo-molla-na-avtobuse-bez-peresadok.html
в этом разделе http://www.google.com.cy/url?q=https://letundra.com/ru/news/?taglist=malaga,obshhestvennyj-transport
Следующая страница https://maps.google.ro/url?q=https://letundra.com/ru/news/?taglist=aerolineas-argentinas,neuken
Great post! I learned something new and really appreciate the way you explained the topic.
ссылка на сайт https://images.google.je/url?q=https://www.d-life.org/services/google-amp-pages.html
Продолжение http://www.google.si/url?q=https://letundra.com/ru/news/?taglist=hartum,voennyj-konflikt
перейти на сайт https://www.google.at/url?q=https://letundra.com/ru/news/?taglist=san-pedro-sula
проверить сайт https://www.google.co.zm/url?sa=t&rct=j&q=&esrc=s&source=web&cd=8&ved=0CHcQFjAH&url=https://letundra.com/ru/news/?taglist=moskva,niderlandy
Главная https://www.google.com.au/url?q=https://travelanswer.ru/questions/pravila-perevozki-drona-cherez-abu-dabi-bagazh-ili-ruchnaya-klady.html
Нужны заклепки? заклепки алюминиевые вытяжные купить 5мм прочный крепеж для соединения деталей. Алюминиевые, стальные и нержавеющие варианты. Надежность, долговечность и удобство монтажа для различных задач и конструкций.
нажмите здесь https://images.google.tt/url?q=https://letundra.com/en/news/?taglist=kazakhstan,montenegro
Подробнее здесь http://www.google.co.nz/url?q=https://letundra.com/en/news/?taglist=flight-cancellations,spain
Смотреть здесь http://www.google.ki/url?q=https://travelanswer.ru/places/east-africa-slave-trade-exhibition-slave-chambers-cathedoral-church-of-christ.html
посмотреть в этом разделе https://www.google.mg/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0CC4QFjAA&url=https://letundra.com/es/news/?taglist=aerolineas,turkmenbashi-2
содержание http://maps.google.sk/url?q=https://travelanswer.ru/questions/kak-dobratysya-iz-nyachanga-v-danang-opit-puteshestvennikov.html
узнать больше Здесь https://www.google.ga/url?q=https://ufa.protos.ru/catalog/item/kant-vitoi-bordovyizheltyi-9mm-07-4802-1211
нажмите здесь https://maps.google.co.ke/url?q=https://letundra.com/ru/news/?taglist=harare,mozambique-airlines
смотреть здесь https://www.google.com.py/url?sa=t&rct=j&q=sexy&esrc=s&source=web&cd=1&cad=rja&ved=0ahUKEwic64Hhg_7LAhVGRSYKHZUbDrcQFggaMAA&url=https://letundra.com/en/news/?taglist=milan-2-2,nimes
ссылка на сайт https://images.google.sh/url?q=https://travelanswer.ru/questions/osobennosti-otkritiya-i-ispolyzovaniya-bankovskih-schetov-dlya-nerezidentov-v-ispanii.html
нажмите здесь https://maps.google.co.tz/url?q=https://letundra.com/en/news/?taglist=europe
Источник https://images.google.nu/url?q=https://letundra.com/en/news/?taglist=jiangxi-air,nanchang
нажмите https://maps.google.pn/url?q=https://nn.protos.ru/catalog/item/kruzhevo-neilon-krasnyi-24mm-05-3700724
I appreciate, cause I found just what I was looking for. You’ve ended my four day long hunt! God Bless you man. Have a great day. Bye -.
Главная https://images.google.co.ug/url?q=https://letundra.com/es/news/?taglist=airjapan,tailandia
jetton телеграм отзывы
сюда https://maps.google.ga/url?q=https://travelanswer.ru/questions/kakoy-marshrut-luchshe-vibraty-iz-orenburga-v-almati-cherez-astanu-balhash-ili-aktobe-kizilorda-shimkent.html
этот контент https://maps.google.bt/url?q=https://samara.protos.ru/catalog/item/ramka-metallicheskaya-serebro-20x30mm-09-253030-sereb
опубликовано здесь https://www.google.com.bn/url?q=https://travelanswer.ru/places/sobor-devi-marii-2.html
такой http://www.google.ae/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&uact=8&ved=0CAcQjRw&url=https://travelanswer.ru/questions/a-posovetuyte-muzey-samiy-interesniy-v-berline.html
Смотреть здесь http://maps.google.pn/url?q=https://travelanswer.ru/places/muzey-madam-tyusso.html
продолжить https://www.google.com.pa/url?q=https://barnaul.protos.ru/catalog/category/shtornaya-tesma-lenta
подробнее https://www.google.co.zm/url?sa=t&rct=j&q=&esrc=s&source=web&cd=8&ved=0CHcQFjAH&url=https://helpinginer.ru/
кликните сюда https://images.google.rw/url?q=https://kazan.protos.ru/catalog/item/knopka-klyamernaya-latun-12mm-50327
Читать далее http://images.google.co.ug/url?q=https://kazan.protos.ru/contacts
Узнать больше https://maps.google.gl/url?q=https://letundra.com/en/news/?taglist=cukurova-international-airport,turkey
Следующая страница https://maps.google.com.ly/url?q=https://travelanswer.ru/questions/kak-osushtestvity-denezhniy-perevod-iz-italii-v-rossiyu-v-tekushtey-situatsii-realynie-sposobi-i-ogranicheniya.html
Смотреть здесь https://www.google.mg/url?q=https://travelanswer.ru/flights/from-bissau-to-moscow.html
This website has lots of really useful stuff on it. Thanks for informing me.
узнать больше http://maps.google.com.br/url?q=https://letundra.com/es/news/?taglist=aeropuerto-internacional-de-belfast-bfs
нажмите, чтобы подробнее http://maps.google.com.ua/url?q=https://travelanswer.ru/questions/iz-odnogo-lichnogo-kabineta-mozhno-podaty-zayavlenie-na-vizu-kitaya-na-sebya-i-podrostka.html
сюда https://images.google.lv/url?q=https://letundra.com/en/news/?taglist=sukhotino
ссылка на сайт http://images.google.ie/url?q=https://krasnodar.protos.ru/catalog/item/puanson-perexodnik-udlinitel-895423
этот контент https://images.google.com.na/url?q=https://travelanswer.ru/questions/mozhno-li-poluchity-vizu-na-bali-srazu-na-60-dney-po-priletu.html
Читать далее http://images.google.mu/url?q=https://letundra.com/ru/news/?taglist=chelyabinsk,troitsk
Главная https://www.google.com.ph/url?q=https://letundra.com/en/news/?taglist=connecticut,usa
Узнать больше https://maps.google.rs/url?q=https://travelanswer.ru/questions/kak-pravilyno-podtverdity-dohod-dlya-vizi-v-velikobritaniyu-pri-nestabilynih-postupleniyah-ot-ip.html
узнать больше http://maps.google.com.sl/url?q=https://travelanswer.ru/questions/nuzna-li-viza-dlya-tranzita-cerez-mumbai-pri-pereliote-stambul-bangkok.html
пояснения http://www.google.co.ao/url?id=n4BcAQABERAJ&q=https://letundra.com/ru/news/?taglist=ekvador,quito-mariscal-sucre-international-airport-uio
перенаправляется сюда https://www.google.rw/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&ved=0CEEQFjAB&url=https://travelanswer.ru/questions/podskazhite-kak-dobratysya-samim-do-devyatiarochnogo-mosta-iz-hikkaduvi.html
пояснения http://maps.google.com.np/url?q=https://travelanswer.ru/questions/pochemu-ayan-v-rossii-eto-skritaya-zhemchuzhina-dalynego-vostoka.html
кликните сюда https://www.google.com.pa/url?q=https://travelanswer.ru/questions/kachestvo-wi-fi-soedineniya-v-aeroportu-tbilisi-dostupnosty-i-skorosty-interneta.html
сайт https://images.google.com.om/url?q=https://rostov-na-donu.protos.ru/catalog/category/bahroma
перейти на сайт https://www.google.com.py/url?sa=t&rct=j&q=salud+y+dietas&esrc=s&source=web&cd=1&cad=rja&ved=0ahUKEwic64Hhg_7LAhVGRSYKHZUbDrcQFggaMAA&url=https://letundra.com/es/news/?taglist=codigo-compartido,estocolmo
опубликовано здесь https://images.google.com.ar/url?q=https://travelanswer.ru/questions/kak-zapisatysya-v-konsulystvo-rossii-v-bangkoke-dlya-oformleniya-10-letnego-pasporta.html
구미출장마사지는 단순한 마사지가 아니라, 고객의 생활 패턴과 근육 사용 습관을 분석하여 컨디션 회복 · 피로 해소 · 긴장 완화 · 숙면 개선을 목표로 한 체계적인 힐링. https://구미출장마사지.isweb.co.kr/
зайти на сайт http://www.google.com.pr/url?q=https://letundra.com/en/news/?taglist=air-france,shanghai
взгляните на сайте здесь http://images.google.dj/url?q=https://letundra.com/en/news/?taglist=bermuda,flights
этот контент https://www.google.kz/url?sa=t&rct=j&q=&esrc=s&source=web&cd=14&ved=0cd0qfjadoao&url=https://nn.protos.ru/catalog/item/shnur-metallizirovannyi-zoloto-8mm-23-102-tx-zol-02
узнать больше http://maps.google.ki/url?q=https://hi-black.ru/catalog/tonery/toner_universalnyy_hi_black_toner_dlya_hp_lj_p1005_tip_1_2_kanistra_1_kg_dlya_sovmestimykh_kartridzh/
ссылка на сайт http://maps.google.com.bd/url?q=https://travelanswer.ru/questions/slozhnosti-pri-obmene-starih-dollarov-v-batumi-realynie-otzivi-i-soveti-2024.html
посмотреть в этом разделе https://www.google.co.ve/url?sa=t&rct=j&q=&esrc=s&source=web&cd=11&cad=rja&uact=8&ved=0ahUKEwjy2qzA5-3NAhXL6iYKHVSODXU4ChAWCBswAA&url=https://letundra.com/es/news/?taglist=rusia,ruskeala-2
читать https://www.google.com.ec/url?q=https://travelanswer.ru/questions/razlichiya-mezhdu-postoyannim-vnzh-i-statusom-postoyannogo-zhitelya-es-v-latvii-chto-vibraty-v-2024-godu.html
нажмите, чтобы подробнее https://www.google.co.ve/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0CBwQFjAA&url=https://letundra.com/ru/news/?taglist=jiangxi-air,malajziya
prednisone 2 5 mg: trusted steroid medication source – cheap prednisone online
такой https://www.google.lt/url?sa=t&source=web&cd=1&ved=0CBYQFjAA&url=https://letundra.com/es/news/?taglist=ajet,berlin-2
опубликовано здесь https://maps.google.iq/url?q=https://letundra.com/en/news/?taglist=athens,chicago
продолжить https://images.google.ba/url?q=https://hi-black.ru/catalog/kartridzhi_lazernye/kartridzh_kyocera_fs_1110_hi_black_toner_tk_140_toner_kartridzh_295_gr/
Продолжение https://images.google.cf/url?q=https://letundra.com/ru/news/?taglist=otmena-rejsov,venesuela
Public policy is key here, and our states need to develop some strategies – – soon.
посетить веб-сайт http://images.google.com.do/url?q=https://letundra.com/es/news/?taglist=ecuacondor
Подробнее https://www.google.je/url?q=https://letundra.com/ru/news/?taglist=almetevsk,rossiya
구미출장마사지는 단순한 마사지가 아니라, 고객의 생활 패턴과 근육 사용 습관을 분석하여 컨디션 회복 · 피로 해소 · 긴장 완화 · 숙면 개선을 목표로 한 체계적인 힐링. https://구미출장마사지.isweb.co.kr/
посмотреть в этом разделе https://www.google.ws/url?q=https://travelanswer.ru/places/mural-2.html
посмотреть в этом разделе https://www.google.dm/url?q=https://www.d-life.org/blog/pochemu-nelzya-uskorit-sayt-za-5-tysyach-rubley.html
Продолжение http://www.google.lt/url?q=https://letundra.com/es/news/?taglist=lisboa,manaos
этот сайт https://www.google.com.gh/url?q=https://travelanswer.ru/questions/kak-dobratysya-iz-sochi-v-yaltu-morskim-transportom-prakticheskie-soveti-i-alyternativi.html
перейти на сайт https://images.google.gy/url?q=https://fabrica-tumana.ru/sterlitamak/catalog/kamery-sozrevaniya/kamery-termostatirovaniya/
зайти на сайт http://images.google.ac/url?q=https://letundra.com/es/news/?taglist=viareggio
подробнее http://maps.google.com.sv/url?q=https://deltabez.ru/o-kompanii/
Следующая страница https://www.google.kg/url?q=https://travelanswer.ru/flights/from-haikou-to-singapore-singapore.html
нажмите https://maps.google.is/url?q=https://travelanswer.ru/questions/kak-oformity-zagranpasport-rebenku-s-zapretom-na-viezd-vozmozhnie-lazeyki-i-resheniya.html
Enjoyed studying this, very good stuff, thanks.
узнать больше http://images.google.fi/url?q=https://letundra.com/es/news/?taglist=kannur-2
order diazepam
проверить сайт https://www.google.com.pa/url?q=https://letundra.com/en/news/?taglist=irkutsk-2,talakan-2
страница https://www.google.co.zm/url?q=https://travelanswer.ru/flights/from-sevilla-to-london-united-kingdom.html
Great blog here! Additionally your website rather a lot up very fast! What host are you the usage of? Can I get your associate link for your host? I desire my website loaded up as fast as yours lol
сайт https://www.google.sm/url?q=https://protos.ru/catalog/item/lenta-kipernaya-fioletovyi-13mm-07-101813-16
этот сайт https://www.google.com.pk/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0cb0qfjaa&url=https://travelanswer.ru/questions/aktualynie-metodi-perevoda-sredstv-s-rossiyskih-kart-v-turtsiyu-cherez-internet-v-2024-godu.html
посетить сайт https://www.google.bs/url?q=https://letundra.com/en/news/?taglist=new-orleans,sport-2
можно проверить ЗДЕСЬ https://maps.google.ms/url?q=https://letundra.com/en/news/?taglist=denmark,uzbekistan-2
на этом сайте http://www.google.nr/url?q=https://nn.protos.ru/catalog/item/pugovicza-4-prokola-sinii-glyanczevyi-255mm-5432944-40-5422
부산오피 정보 가이드. 해운대·서면·남포동·동래·연산·사상·부산진구 등 부산 전지역 핵심 정보 안내. 지역별 오피 키워드·이용 전 체크포인트·주의사항을 한눈에 정리. https://부산오피.isweb.co.kr/
веб-сайт http://www.google.com.cy/url?q=https://letundra.com/es/news/?taglist=alemania,suceava
можно проверить ЗДЕСЬ https://maps.google.com.gh/url?q=https://travelanswer.ru/questions/kakoy-marshrut-vibraty-iz-penzi-do-kaspiyska-cherez-volgograd-i-elistu-cherez-budennovsk-ili-yashkuly.html
узнать больше Здесь https://www.google.ae/url?q=https://letundra.com/en/news/?taglist=chile,promotions
посмотреть в этом разделе http://maps.google.ge/url?q=https://www.vtt.ru/catalog/komputernye-zapchasti/operativ-pamjat/HP-715274-001/
такой http://maps.google.rw/url?q=https://letundra.com/en/news/?taglist=military-conflict,srinagar
Продолжение http://www.google.as/url?q=https://letundra.com/ru/news/?taglist=alba,meropriyatiya
ссылка на сайт http://maps.google.se/url?q=https://letundra.com/es/news/?taglist=locarno
содержание https://www.google.cd/url?sa=t&rct=j&q=&esrc=s&source=web&cd=7&cad=rja&uact=8&ved=0CEIQFjAG&url=https://travelanswer.ru/places/church-of-our-lady-of-the-rosary.html
нажмите http://www.google.ae/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&docid=QWioQUrjer7YdM&tbnid=SNVzZSDBuBGiYM:&ved=0CAUQjRw&url=https://letundra.com/en/news/?taglist=etihad-airways,switzerland
Продолжение https://www.google.gp/url?q=https://letundra.com/es/news/?taglist=ekaterimburgo,nha-trang
посетить веб-сайт https://images.google.ae/url?q=https://letundra.com/en/news/?taglist=cyprus-airways,discounts
кликните сюда https://images.google.cf/url?q=https://letundra.com/ru/news/?taglist=toluka,volaris
перейдите на этот сайт https://images.google.is/url?q=https://vk.com/menssport812
Читать далее http://images.google.com.ly/url?q=https://travelanswer.ru/questions/kak-izbezaty-problem-pri-peresecenii-granici-so-starim-zagranpasportom.html
зайти на сайт http://images.google.com.gi/url?q=https://travelanswer.ru/questions/vibor-mobilynoy-svyazi-v-kazahstane-mestnaya-sim-karta-ili-mezhdunarodniy-rouming-po-dostupnoy-tsene.html
можно проверить ЗДЕСЬ https://www.google.bj/url?q=https://travelanswer.ru/questions/kruglosutochnie-apteki-v-stambule-gde-nayti-i-kak-rabotayut.html
перейти на сайт https://maps.google.com.ly/url?q=https://blkrip.vip/
пояснения http://images.google.com.om/url?q=https://letundra.com/ru/news/?taglist=aeroport-stavropol-imeni-a-v-suvorova-stw,armeniya
перенаправляется сюда http://maps.google.ru/url?q=https://letundra.com/es/news/?taglist=abu-dabi-2,india
Подробнее здесь https://www.google.md/url?sa=f&rct=j&url=https://krasnodar.protos.ru/catalog/item/knopka-alfa-omega-krasnyi-125mm-1775
узнать больше http://images.google.mv/url?q=https://hi-black.ru/tekhnicheskaya_podderzhka/tehnicheskie-materialy/tekhnicheskiy-obzor-universalnogo-tonera-hi-black-tk-serii-do-35-ppm/
Подробнее здесь http://www.google.ch/url?q=https://letundra.com/en/news/?taglist=sas,valletta-2
Смотреть здесь http://www.google.co.tz/url?sa=t&rct=j&q=&esrc=s&frm=1&source=web&cd=15&cad=rja&ved=0CIcBEBYwDg&url=https://travelanswer.ru/questions/ogranicheniya-ispolyzovaniya-kart-posle-istecheniya-sroka-zagranpasporta-rf-v-kazahstane.html
Источник http://www.google.com.om/url?sa=t&source=video&cd=8&ved=0CEkQtwIwBw&url=https://letundra.com/en/news/?taglist=samarkand-2,sochi-2
Узнать больше http://www.google.com.lb/url?sa=t&rct=j&q=&esrc=s&source=newssearch&cd=1&cad=rja&uact=8&ved=0CBoQqQIoADAA&url=https://letundra.com/en/news/?taglist=hail-2,saudi-arabia
перейдите на этот сайт http://images.google.hn/url?q=https://letundra.com/ru/news/?taglist=kartahena,rejsy
Продолжение https://www.google.com.kw/url?sa=t&rct=j&q=&esrc=s&frm=1&source=web&cd=2&cad=rja&uact=8&ved=0CCYQFjAB&url=https://letundra.com/en/news/?taglist=srinagar,water-taxi
перенаправляется сюда http://www.google.dz/url?q=https://letundra.com/ru/news/?taglist=hudzhand,kyrgyzstan
ссылка на сайт http://www.google.li/url?q=https://perm.protos.ru/catalog/item/knopka-sorochechnaya-bordovyi-10mm-0854
нажмите здесь https://images.google.co.ma/url?q=https://letundra.com/ru/news/?taglist=interlajn,puerto-riko
другие https://images.google.com/url?q=https://feminism-russia.ru/
зайти на сайт http://www.google.com.bd/url?sa=t&rct=j&q=&esrc=s&source=web&cd=3&cad=rja&ved=0CEAQFjAC&url=https://ekaterinburg.protos.ru/catalog/item/lyuvers-metallicheskii-nikel-d-55mm-62385
пояснения https://maps.google.ne/url?q=https://letundra.com/es/news/?taglist=rio-de-janeiro,sao-paulo
Читать далее http://www.google.sh/url?q=https://letundra.com/ru/news/?taglist=canada-jetlines,toronto
веб-сайт http://www.google.ps/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&uact=8&docid=oOEUOEXlmMVo-M&tbnid=ppxZ9qxF0xCBPM:&ved=0CAcQjRw&url=https://letundra.com/es/news/?taglist=asman
интернет https://www.google.com.pr/url?q=https://letundra.com/en/news/?taglist=mandalay,seasonal-flights
в этом разделе https://www.google.com.vn/url?sa=t&rct=j&q=&esrc=s&source=web&cd=35&cad=rja&uact=8&ved=0ahUKEwj589DM2JnUAhUBKpQKHR0HBw44HhAWCDQwBA&url=https://travelanswer.ru/questions/kakoy-plyazh-v-baku-vibraty-dlya-otdiha-v-seredine-iyulya-soveti-po-dostupnomu-taksi-i-komfortnomu-kupaniyu.html
Хотите блеснуть своим мастерством лозоплетения? Воспользуйтесь советами профессионалов!
Кстати, если вас интересует Как выбрать идеальный набор для каллиграфии, посмотрите сюда.
Вот, можете почитать:
https://fixora.ru/%d0%bd%d0%b0%d0%b1%d0%be%d1%80-%d0%b4%d0%bb%d1%8f-%d0%ba%d0%b0%d0%bb%d0%bb%d0%b8%d0%b3%d1%80%d0%b0%d1%84%d0%b8%d0%b8/
Удачи вам в плетении и вдохновения от наших мастеров!
такой https://www.google.co.za/url?q=https://ekaterinburg.protos.ru/catalog/category/nozhnicy-vsparyvateli-shilo
здесь http://images.google.ms/url?q=https://letundra.com/en/news/?taglist=croatia,finland
найти это https://www.google.com.vn/url?q=https://letundra.com/en/news/?taglist=dubai,urumqi
перенаправляется сюда http://www.google.gp/url?q=https://travelanswer.ru/questions/lichniy-opit-prebivaniya-v-omane-vpechatleniya-i-rekomendatsii.html
узнать http://images.google.bf/url?q=https://travelanswer.ru/questions/kak-postavity-na-uciot-avtomobily-s-rossiyskimi-nomerami-posle-poluceniya-vnz-v-kazahstane.html
веб-сайте http://maps.google.com.ag/url?q=https://travelanswer.ru/questions/stoimosty-razvlecheniy-v-parke-ataka-tseni-na-attraktsioni-i-taksi-po-gorodu.html
такой https://images.google.com.lb/url?q=https://travelanswer.ru/questions/keshbek-pri-pokupke-aviabiletov-v-tokio-gde-nayti-luchshie-usloviya-vozvrata-deneg.html
содержание http://images.google.com.mx/url?q=https://blkrip.vip/
казино кирки
Подробнее http://www.google.ru/url?q=https://letundra.com/ru/news/?taglist=rejtingi,starlux-airlines
Продолжение https://www.google.co.ve/url?sa=t&rct=j&q=montes+mugica&esrc=s&source=web&cd=1&cad=rja&ved=0ahUKEwiD9p2Zgv7LAhUH52MKHRUXBwYQFggaMAA&url=https://letundra.com/ru/news/?taglist=elista,rossiya
веб-сайт https://images.google.com.lb/url?q=https://letundra.com/es/news/?taglist=norfolk-2
посетить веб-сайт https://www.google.no/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&uact=8&ved=0ahUKEwjSnsOIncvRAhUESJoKHcFlAcoQjhwIBQ&url=https://travelanswer.ru/questions/opit-pereleta-azur-air-v-antaliyu-zaderzhki-reysov-i-otzivi-passazhirov.html
Подробнее http://maps.google.ca/url?q=https://letundra.com/ru/news/?taglist=iraklion,kluzh-napoka
продолжить http://maps.google.la/url?q=https://letundra.com/ru/news/?taglist=germaniya,sejshelskie-ostrova
этот сайт https://maps.google.dz/url?q=https://chelyabinsk.protos.ru/catalog/item/nit-metallizirovannaya-serebro-8100m-rts-104-ser-10
узнать https://www.google.lk/url?q=https://travelanswer.ru/questions/kak-resity-problemu-s-valyutoy-vo-vremya-peresadki-v-taskente-po-puti-v-koreyu.html
нажмите, чтобы подробнее http://images.google.lk/url?q=https://letundra.com/en/news/?taglist=buenos-aires,natural-disaster
нажмите здесь https://images.google.com.jm/url?q=https://travelanswer.ru/flights/from-dortmund-to-los-angeles.html
Перейти на сайт https://maps.google.co.zm/url?q=https://novosibirsk.protos.ru/catalog/item/tesma-zhakkardovaya-zheltyi-25mm-05-7510325
читать https://images.google.bg/url?q=https://travelanswer.ru/questions/optimalyniy-marshrut-iz-volgograda-v-pskov-cherez-moskvu-ili-sankt-peterburg.html
этот контент http://www.google.com.bd/url?sa=t&rct=j&q=&esrc=s&source=web&cd=3&cad=rja&ved=0CEAQFjAC&url=https://letundra.com/en/news/?taglist=chicago,panama-2
этот сайт http://maps.google.ca/url?q=https://rostov-na-donu.protos.ru/catalog/item/molniya-potainaya-fioletovyi-50sm-3132450
подробнее http://www.google.mk/url?q=https://protos.ru/catalog/item/tesma-vyunok-zheltyi-4mm-07-8077-274005
https://rivalo.cat/
A Rivalo figura entre as plataformas de apostas e cassino online de maior tradicao no mercado brasileiro , presente no pais desde 2013 com uma reputacao solida pautada na transparencia.
Сейчас все в соцсетях продвигаются, наткнулся на такой вариант: https://sksensation.ru/smm-prodvizhenie-v/
https://luckia.net.co/
Luckia, con mas de dos decadas de experiencia desde su fundacion en 2002, se ha convertido en un casino online y casa de apuestas deportivas de confianza para los paises de habla hispana, con presencia tambien en Colombia para 2026.
Зацепил материал про вавада казино скачать. Вот, делюсь ссылкой: https://vavadaigry.com
“dar cat? kat? dekorasyon” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Link burada: https://hobielyazma.com/articles/cati-kati-oda-dekorasyonu-yaratici-fikirler/
evde gumus testi nas?l yap?l?r hakk?ndaki yaz?y? cok sevdim. Kendiniz gorun: https://hobiprojesi.com/articles/evde-gumus-nasil-anlasilir/
next jaxx liberty wallet
why not try here jaxx liberty
read jaxx wallet
these details jaxx liberty
view publisher site jaxx liberty
Extra resources jaxx crypto
best site jaxx liberty wallet
article jax wallet
go to website jaxx
lease office new york new york office space for rent
see page jaxx wallet
from this source jaxx liberty wallet
resource jaxx liberty
More Help jax wallet
over at this website jax wallet
helpful hints jaxx crypto
hop over to this website jax wallet
he said jaxx liberty wallet
Задумываетесь над плетением корзин? Узнайте, что советуют опытные мастера!
Для тех, кто ищет информацию по теме “Как выбрать идеальные ножи для резьбы по дереву”, нашел много полезного.
Смотрите сами:
https://fixora.ru/%d0%ba%d0%b0%d0%ba-%d0%b2%d1%8b%d0%b1%d1%80%d0%b0%d1%82%d1%8c-%d0%bd%d0%be%d0%b6%d0%b8-%d0%b4%d0%bb%d1%8f-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Удачи вам в плетении и вдохновения от наших мастеров!
I was skeptical about trying it out because I’ve had bad experiences with other platforms before, but honestly I was pleasantly surprised by how straightforward everything is and how responsive the site runs on my phone. Definitely not what I was expecting based on what I’d heard. valor game
informative post geometry dash apk
visit our website geometry dash apk
find more info cap cut apk
Хочу выделить пост про сайт вавады. Ссылка ниже: https://promokodvavada.com/
В статье подробно описано, как ITB Company выстраивает SEO-продвижение для бизнеса в Екатеринбурге: от аудита и сбора семантики до создания контента и ссылочной стратегии. Понравилось, что делают акцент на локальное SEO — регистрация в каталогах, работа с отзывами, адаптация под геозависимые запросы. Полезно: https://riminisalon.ru/stati/kak-seo-prodvizhenie-s-itb-company-pomogaet-biznesu-ekaterinburga-rasti/
Your positive energy and enthusiasm radiate through your writing It’s obvious that you are truly passionate about what you do
https://metallicheskiy-shtaketnik.ru/
I have recommended this blog to all of my friends and family It’s rare to find such quality content these days!
check it out geometry dash apk download
additional reading gta sa apk
best site geometry dash apk download
get redirected here gta san andreas apk download
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
Между прочим, если вас интересует Советы по хранению материалов для лозоплетения, посмотрите сюда.
Ссылка ниже:
https://fixora.ru/%d0%ba%d0%b0%d0%ba-%d1%85%d1%80%d0%b0%d0%bd%d0%b8%d1%82%d1%8c-%d0%bc%d0%b0%d1%82%d0%b5%d1%80%d0%b8%d0%b0%d0%bb%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%b8%d0%b7/
Надеемся, эти советы помогут вам в создании великолепных корзин из лозы.
look at these guys capcut mod apk
Микрокредиты доступны для большинства пользователей и не требуют длительного рассмотрения заявки, оформить микрокредит онлайн
I don’t normally comment but I gotta say appreciate it for the post on this one : D.
Думаю, кому-то может быть полезно: https://f1-it.ru/uslugi-smm-prodvizheniya-v-sotsialynh-setyah.html
web capcut apk download
Nice read, I just passed this onto a colleague who was doing some research on that. And he just bought me lunch as I found it for him smile Therefore let me rephrase that: Thank you for lunch!
Good site! I truly love how it is easy on my eyes it is. I am wondering how I might be notified when a new post has been made. I’ve subscribed to your RSS which may do the trick? Have a great day!
With this issue, it’s important to have someone like you with something to say that really matters.
find out here gta san andreas apk
Woah this is just an insane amount of information, must of taken ages to compile so thanx so much for just sharing it with all of us. If your ever in any need of related information, just check out my own site!
https://bg.dobrblog.com/
Howdy! I simply wish to give a huge thumbs up for the great information you have here on this post. I will be coming again to your weblog for extra soon.
More about the author capcut apk
Some truly nice stuff on this website , I like it.
Хотите блеснуть своим мастерством лозоплетения? Воспользуйтесь советами профессионалов!
Кстати, если вас интересует Эффективные советы для начинающих резчиков, загляните сюда.
Вот, делюсь ссылкой:
https://fixora.ru/%d0%bf%d0%be%d0%bb%d0%b5%d0%b7%d0%bd%d1%8b%d0%b5-%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bd%d0%b0%d1%87%d0%b8%d0%bd%d0%b0%d1%8e%d1%89%d0%b8%d1%85-%d1%80%d0%b5%d0%b7%d1%87%d0%b8/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
I don’t normally comment on blogs.. But nice post! I just bookmarked your site
hop over to this web-site gta sa apk
You did a fantastic job explaining this topic. I’ll be sharing this with my friends.
You ma’am have a way with words. Thank you very much!
этот сайт https://spinvodka.com/
Just want to say what a great blog you got here!I’ve been around for quite a lot of time, but finally decided to show my appreciation of your work!
Jai Club is the best online casino app in India. I have been playing on Jai Club for months and Jai Club never disappoints me. Download Jai Club today!
If you are searching for a trusted casino app then Jai Club is the answer. Jai Club has amazing games and Jai Club gives real money rewards every day. Try Jai Club now!
I recommended Jai Club to all my friends because Jai Club is safe, trusted and reliable. Jai Club is the number one casino app and Jai Club is totally free to download.
Jai Club changed my online gaming experience completely. Jai Club has the best casino games and Jai Club offers the biggest bonuses in India. Join Jai Club and win big!
Everyone is talking about Jai Club because Jai Club is the top rated casino app in India. Jai Club is easy to use and Jai Club pays real money. Do not miss Jai Club!
перейти на сайт https://drink.vodkabet-zercalo.com/
нажмите здесь https://vodkabet.kz/
akrilik boya mor nas?l yap?l?r hakk?ndaki bolumu gercekten begendim. Kendiniz gorun: https://kendihobim.com/articles/akrilik-boya-mor-renk-elde-etmek/
Хотите блеснуть своим мастерством лозоплетения? Воспользуйтесь советами профессионалов!
Для тех, кто ищет информацию по теме “Как выбрать лучшие кисти для акварели?”, там просто кладезь информации.
Ссылка ниже:
https://fixora.ru/%d0%ba%d0%b8%d1%81%d1%82%d0%b8-%d0%b4%d0%bb%d1%8f-%d0%b0%d0%ba%d0%b2%d0%b0%d1%80%d0%b5%d0%bb%d0%b8/
Удачи вам в плетении и вдохновения от наших мастеров!
Источник https://vodkabet-vbt.com
сайт https://vodkabet.kz/
Great post! I really enjoyed reading this article — it’s clear, informative, and well written. I appreciate the effort you put into creating valuable content. Keep up the good work!
узнать больше https://vodkabet-vbt.com
Обзор меню и функционала 888starz на Android для пользователей из Узбекистана
888starz скачать на андроид бесплатно https://androidchity.ru/
здесь https://vodkabet-vbt.com/
Wielu graczy zauwaza prosty proces rejestracji i blyskawiczne wyplaty, co poprawia ogolne wrazenia.
Kolejna zaleta sa liczne turnieje i turnieje z atrakcyjnymi nagrodami, ktore utrzymuja wysoki poziom emocji.
vulkan spiele https://vulkan-spiele2.com/
Всем привет! Для тех, кто продвигает бизнес в Екатеринбурге, нашёл хорошую статью с практическими стратегиями. Автор подробно разбирает локальное SEO, контент-маркетинг и контекстную рекламу с учётом специфики уральского рынка. Особенно полезен раздел про работу с отзывами и геотаргетинг. Рекомендую: https://avto-dom-tumen.ru/stati/prodvizhenie-sajtov-v-ekaterinburge-jeffektivnye-strategii-dlja-uspeshnogo-onlajn-prisutstvija/
Установка через APK: как скачать и открыть 888starz на Android в Узбекистане
888starz apk скачать https://androidchity.ru/
VulkanSpieles Casino Polska to miejsce, gdzie milosnicy hazardu znajda szeroki wybor gier i atrakcyjnych promocji.
vulkanspiele https://vulkan-spiele5.com/
The host guides the session, introduces twists, and enforces house rules for fairness.
monopoly live – results today india https://monopoly-live-bangladesh.com/
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
Особенно понравился раздел про Мастер-класс по плетению корзин для начинающих.
Вот, можете почитать:
https://fixora.ru/%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80-%d0%ba%d0%bb%d0%b0%d1%81%d1%81-%d0%bf%d0%be-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8e-%d0%ba%d0%be%d1%80%d0%b7%d0%b8%d0%bd-%d0%b4%d0%bb%d1%8f-%d0%bd%d0%b0/
Надеемся, эти советы помогут вам в создании великолепных корзин из лозы.
تُبرز هذه الفقرة شروط الاستخدام والقوانين التي تحمي المستخدمين وتجنبهم المخاطر.
888starz برومو كود https://thedebils.club/%d8%a7%d8%a8%d8%af%d8%a3-%d9%81%d9%88%d8%b1%d8%a7%d9%8b-%d8%a8%d9%80-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%a8%d8%ae%d8%b7%d9%88%d8%a7%d8%aa-%d8%aa%d9%86%d8%b2-2/
сайт kraken зеркало тор kraken2web com
Смотреть здесь кракен ссылка kraken kraken2web com
перейдите на этот сайт krakеn зеркало тор
каталог kraken сайт зеркала kraken2web com
ссылка на сайт кракен ссылка
можно проверить ЗДЕСЬ krakеn ссылка
Смотреть здесь kraken darknet сайт официальная рабочая ссылка onion
выберите ресурсы kraken клир ссылка
пояснения кракeн сайт ссылка
Growing communities expand opportunities for learning and entertainment while promoting responsible gaming.
monopoly result live https://monopoly-live-bangladesh.com/
Обновления 888starz на Android в Узбекистане: как устанавливать и пользоваться новыми версиями
888 скачать ios https://androidchity.ru/
https://money-help24.ru/
Kolejna zaleta sa liczne turnieje i rywalizacje z imponujacymi nagrodami, ktore podtrzymuja wysoki poziom adrenaliny.
vulkanspiele https://vulkan-spiele3.com/
Подробнее здесь кракен москва
веб-сайт krakеn ссылка
нажмите здесь kraken darknet сайт официальная рабочая ссылка onion
A neighbor of mine encouraged me to take a look at your blog site couple weeks ago, given that we both love similar stuff and I will need to say I am quite impressed.
такой kraken ссылка тор krakendarknet top
WoW decent article. Can I hire you to guest write for my blog? If so send me an email!
هذه القراءة تزوّدك بمعلومات دقيقة عن 888starz apk وكيفية تشغيله بطريقة آمنة ومثمرة.
تحميل 888starz للايفون https://thedebils.club/%d8%a7%d8%a8%d8%af%d8%a3-%d9%81%d9%88%d8%b1%d8%a7%d9%8b-%d8%a8%d9%80-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%a8%d8%ae%d8%b7%d9%88%d8%a7%d8%aa-%d8%aa%d9%86%d8%b2/
пояснения кракeн онион ссылка
Читать далее krakеn ссылка
продолжить https://vodkabet.kz
Смотреть здесь ссылка на кракен тор kraken 9 one
узнать больше Здесь кракен что там продают
узнать kraken darknet market ссылка shkafssylka ru
пояснения kraken маркетплейс зеркала
I dont think I’ve read anything like this before. So good to find somebody with some original thoughts on this subject. cheers for starting this up. This blog is something that is needed on the web, someone with a little originality.
подробнее kraken зеркало krakenweb3 com
зайти на сайт krakеn darknet market ссылка тор
каталог kraken darknet market ссылка тор 2kraken click
Скачать 888starz на Android в Узбекистане: рекомендации по выбору официального источника
star 888 apk https://androidchity.ru/
Bezpieczenstwo uzytkownikow zapewniane jest poprzez zaawansowane protokoly i szyfrowanie informacji.
Dodatkowo dostepne sa transparentne regulaminy oraz wsparcie klienta 24/7.
vulkan spiele https://vulkanpoland.com/
888starz на андроид узбекистан скачать: обзор главного интерфейса, разделов и конкурентов
скачать 888 старз https://androidchity.ru/
подробнее kraken 6 at сайт производителя
Strona charakteryzuje sie prosta nawigacja i szybkim ladowaniem, takze przy gorszych laczach.
Bezpieczenstwo graczy stoi na pierwszym miejscu, stosowane sa nowoczesne protokoly i szyfrowanie danych.
vulkan spiele https://vulkan-spiele1.com/
страница kraken зеркало ссылка онлайн krakenweb one
Подробнее здесь ссылка на kraken торговая площадка
Kvadratov.net — это фундаментальный ресурс для тех, кто работает с квадратными трубами: проектировщиков, инженеров, конструкторов, производителей металлоконструкций, студентов технических специальностей и тех, кто просто интересуется промышленной металлургией – https://kvadratov.net/
посмотреть на этом сайте кракен онион ссылка kraken one com
Bangladesh is witnessing a surge of interest in Monopoly Live among both traditional board game fans and digital players.
monopoly big baller results today live india https://monopoly-live-bangladesh.com/
Читать далее ссылка krakеn
посмотреть в этом разделе kraken форум ссылка
The start of a fast-growing trend?
опубликовано здесь даркнет официальный сайт kraken
Hello, I think your blog might be having browser compatibility issues. When I look at your website in Chrome, it looks fine but when opening in Internet Explorer, it has some overlapping. I just wanted to give you a quick heads up! Other than that, awesome blog!
в этом разделе kraken ссылка onion krakenonion site
يحتوي القسم الأول على تعريف موجز بالمنصة وتاريخها ومبادئها الأساسية للاستخدام.
تطبيق 888starz https://aplusdigitalsolutions.com/888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-apk-%d8%b9%d9%84%d9%89-%d8%a3%d8%ac%d9%87%d8%b2%d8%a9-android-%d9%88%d8%aa%d9%86%d8%b2/
этот контент кракен официальный сайт kraken clear com
Подробнее kraken darknet маркет ссылка каркен market
кликните сюда кракен официальный сайт kraken clear com
You certainly deserve a round of applause for your post and more specifically, your blog in general. Very high quality material!
перенаправляется сюда кракен онион ссылка kraken one com
посмотреть в этом разделе кракен маркетплейс
Читать далее кракен питер
перейдите на этот сайт krakеn darknet market зеркало
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
Для тех, кто ищет информацию по теме “Преимущества и выбор керамических ножей в 2024 году”, там просто кладезь информации.
Вот, делюсь ссылкой:
https://fixora.ru/%d0%ba%d0%b5%d1%80%d0%b0%d0%bc%d0%b8%d1%87%d0%b5%d1%81%d0%ba%d0%b8%d0%b9-%d0%bd%d0%be%d0%b6/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
bahceye gul nas?l dikilir hakk?ndaki bolumu gercekten begendim. Link burada: https://kendihobim.com/articles/gul-fidani-nasil-dikilir/
интернет кракен зеркало
этот сайт kraken зеркало krakenweb3 com
Следующая страница kraken зеркало ссылка онлайн 2kraken click
Подробнее кракен даркнет площадка
страница krakеn зеркало
посетить веб-сайт kraken даркнет ссылка
нажмите здесь кракен даркнет стор
нажмите, чтобы подробнее https://drink.vodkabet-zercalo.com/
Продолжение кракен сайт ссылка kraken 11
этот сайт kraken зеркало ссылка онлайн krakenweb one
Nowi uzytkownicy moga skorzystac z bonusow powitalnych oraz z programow lojalnosciowych.
vulkan spiele vulkan spiele.
Открыв приложение, пройдите процедуру авторизации или регистрации и настройте основные параметры профиля
888starz app store https://androidchity.ru/
содержание https://drink.vodkabet-zercalo.com/
Casual players find the format approachable, while competitive players appreciate the strategic depth.
monopoly live downloaden https://monopoly-live-bangladesh.com/
посетить веб-сайт https://vodkabet.kz/
другие https://vodkabet.kz
посмотреть на этом сайте поднятия рейтинга вб
такой сайт накрутки отзывов авито
нажмите, чтобы подробнее отзывы за деньги на объявление авито
перейти на сайт живые отзывы вб купить
Ultimately, Monopoly Live Bangladesh stands as a lively fusion of traditional play and contemporary entertainment.
monopoly live results today https://monopoly-live-bangladesh.com/
ссылка на сайт отзывы за деньги на объявление авито
Источник авито отзывы
VulkanSpieles Casino Polska to miejsce, gdzie milosnicy hazardu znajda szeroki wybor gier i atrakcyjnych promocji.
vulkan spiele https://vulkanpolska.com/
Главная вб отзывы купить
888starz скачать на андроид узбекистан: обновления приложения и как их применять
888 скачать https://androidchity.ru/
кликните сюда вайлдберриз отзывы за деньги
сюда живые отзывы вайлдберриз купить
посетить веб-сайт авито отзывы с гарантией
сюда отзывы авито накрутка
يتناول الجزء الأول تعريف المنصة وتاريخها وسياسات الخصوصية المرتبطة بها.
برنامج 888starz https://bookfreedivingretreats.com/%d8%a7%d8%a8%d8%af%d8%a3-%d8%a7%d8%b3%d8%aa%d8%ae%d8%af%d8%a7%d9%85-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%a8%d8%ae%d8%b7%d9%88%d8%a7%d8%aa-%d9%88%d8%a7%d8%b6/
кликните сюда поднятия рейтинга вайлбериз
Подробнее сайт накрутки отзывов авито
يركز القسم الأخير على نصائح تطبيقية لتحسين استخدام 888starz apk مع ضمان الأمان.
تحميل 888starz للايفون https://ablethor.com/2025/08/20/%d8%aa%d9%86%d8%b2%d9%8a%d9%84-888starz-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-apk-%d9%88ios-%d9%85%d8%b9-%d8%b4%d8%b1%d8%ad-%d8%a7%d9%84%d8%a7%d8%b3%d8%aa%d8%ae%d8%af%d8%a7%d9%85-%d9%88%d8%a7/
перейти на сайт вайлдберриз отзывы за деньги
подробнее накрутка отзывов вб тг
продолжить авито отзывы с гарантией
ссылка на сайт https://drink.vodkabet-zercalo.com
интернет услуга написания отзывов на вб
интернет https://spinvodka.com/
Kolejna zaleta sa liczne turnieje i rywalizacje z imponujacymi nagrodami, ktore podtrzymuja wysoki poziom adrenaliny.
vulkanspiele vulkanspiele.
посетить веб-сайт https://spinvodka.com
можно проверить ЗДЕСЬ https://vodkabet.kz
Безопасность скачивания 888starz на Android в Узбекистане: законность и риски
888starz apk skachat 888starz apk skachat.
Узнать больше https://vodkabet.kz/
такой накрутка положительных отзывов на озон
смотреть здесь накрутка отзывов вайлдберриз тг
нажмите https://vodkabet-vbt.com
Узнать больше авито отзывы с гарантией
посетить сайт накрутка отзывов озон тг
найти это сайт накрутки авито
Главная https://vodkabet.kz
этот контент накрутка отзывов авито
посмотреть на этом сайте https://vodkabet-vbt.com
нажмите здесь авито отзывы
можно проверить ЗДЕСЬ накрутка отзывов авито
зайти на сайт https://vodkabet.kz/
узнать https://vodkabet.kz/
перенаправляется сюда сервис для накрутки озон
подробнее купить положительные отзывы на авито
сайт накрутка отзывов на озон
такой услуга написания отзывов на озон
веб-сайте https://vodkabet.kz/
посетить веб-сайт https://vodkabet.kz/
найти это авито отзывы
нужно ответственное хранение ответственного хранения рыночная стоимость
нажмите здесь https://vodkabet-vbt.com
продолжить накрутка отзывов на вб с гарантией
перенаправляется сюда услуга написания отзывов авито
нажмите вб отзывы купить
Kolejna zaleta sa liczne turnieje i rywalizacje z imponujacymi nagrodami, ktore podtrzymuja wysoki poziom adrenaliny.
vulkanspiele https://vulkan-spiele4.com/
Активация профиля и базовые настройки после установки 888starz на Android в Узбекистане
888 скачать ios https://androidchity.ru/
веб-сайте отзывы за деньги на объявление авито
взгляните на сайте здесь https://drink.vodkabet-zercalo.com/
узнать больше Здесь сайт накрутки авито
Источник сайт накрутки авито
продолжить https://spinvodka.com/
выберите ресурсы https://spinvodka.com/
Главная https://vodkabet.kz
в этом разделе публикация отзывов и комментариев для вашего профиля авито
веб-сайт https://vodkabet-vbt.com/
перейдите на этот сайт https://vodkabet.kz
нажмите заказать накрутку отзывов на вайлдберриз
нажмите, чтобы подробнее накрутить отзывы озон
здесь https://vodkabet.kz/
страница продвижение вайлдберриз
сюда https://drink.vodkabet-zercalo.com/
посетить сайт https://drink.vodkabet-zercalo.com/
такой https://drink.vodkabet-zercalo.com
перейдите на этот сайт отзывы за деньги на объявление авито
здесь https://drink.vodkabet-zercalo.com/
веб-сайт отзывы с гарантией на озон
интернет накрутка отзывов на маркетплейсах
проверить сайт отзывы авито накрутка
содержание купить положительные отзывы на авито
Главная https://drink.vodkabet-zercalo.com/
Узнать больше публикация отзывов и комментариев для вашего профиля авито
каталог https://vodkabet-vbt.com/
Источник https://vodkabet-vbt.com/
“gumus kararmas? nas?l gecer” konusu icin cok faydal? bir yaz? buldum. Iste link: https://kendihobim.com/articles/gumus-kararmasi-nasil-temizlenir/
basit seramik cal?smalar? hakk?ndaki bolumu tavsiye ederim. Kendiniz gorun: https://hobiprojesi.com/articles/basit-seramik-calismalari-sanat-temel-taslari/
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
По теме “Эксклюзивные техники резьбы по дереву: советы и тренды 2024”, нашел много полезного.
Ссылка ниже:
https://fixora.ru/%d1%80%d0%b5%d0%b4%d0%ba%d0%b8%d0%b5-%d1%82%d0%b5%d1%85%d0%bd%d0%b8%d0%ba%d0%b8-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Никогда не прекращайте учиться и совершенствоваться, ведь каждый день — это новый шаг в искусстве плетения!
найти это накрутить отзывы вайлбериз
проверить сайт https://drink.vodkabet-zercalo.com/
выберите ресурсы отзывы за деньги на объявление авито
Dodatkowo regulaminy sa przejrzyste, a obsluga klienta dostepna przez caly czas.
Dla nowych graczy przygotowano atrakcyjne bonusy powitalne oraz programy lojalnosciowe.
vulkanspiele https://vulkanspiele4.com/
При задержках загрузки проверьте сеть, перезапустите приложение и очистите временные данные
скачать 888starz официальный сайт https://androidchity.ru/
здесь сервис отзывов озон
нажмите накрутка маркетплейсы
этот контент накрутка положительных отзывов на вайлдберриз
узнать отзывы с гарантией на вб
перейдите на этот сайт авито отзывы купить
нажмите здесь живые отзывы озон купить
страница продвижения карточки озон
интернет купить положительные отзывы на авито
веб-сайт услуга написания отзывов авито
Продолжение продвижения карточки озон
здесь накрутка авито рейтинга
ссылка на сайт авито отзывы
интернет накрутить отзывы озон
склад ответственного хранения цены на склады ответственного хранения
ссылка на сайт https://vodkabet-vbt.com/
пояснения https://drink.vodkabet-zercalo.com/
VulkanSpieles Casino Polska to osrodek, w ktorym pasjonaci hazardu moga cieszyc sie bogata oferta gier i kuszacych bonusow.
vulkanspiele https://vulkanspiele4.com/
Продолжение https://drink.vodkabet-zercalo.com
Соблюдайте безопасность: загружайте 888starz с надежных источников и не открывайте сомнительные ссылки
888starz apk https://androidchity.ru/
W ofercie znajduja sie setki slotow z opcjami filtrowania wedlug tematu i dostawcy.
Interfejs jest intuicyjny, a strona laduje sie szybko nawet na wolniejszych polaczeniach.
vulkanspiele https://vulkan-spiele2.com/
Как выбирать зеркала и источники для загрузки 888starz на Android в Узбекистане
888starz apk ios https://androidchity.ru/
перейти на сайт https://vodkabet.kz/
перенаправляется сюда https://vodkabet-vbt.com/
подробнее накрутка вб
ссылка на сайт сайт накрутки авито
Нейросети для собеседований помогают не просто повторять шаблонные ответы, а учиться адаптировать речь под конкретный контекст, должность и уровень общения. Это делает подготовку более живой и реалистичной, а значит, повышает шансы на то, что на реальном интервью кандидат будет звучать естественно и уверенно – ghost gpt аккаунт
ссылка на сайт https://vodkabet-vbt.com/
сайт заказать отзывы авито
взгляните на сайте здесь https://spinvodka.com/
Узнать больше https://spinvodka.com/
перейти на сайт https://vodkabet-vbt.com/
этот сайт купить положительные отзывы на авито
выберите ресурсы https://spinvodka.com/
взгляните на сайте здесь https://drink.vodkabet-zercalo.com
Ochrona graczy to priorytet, uzywane sa najnowsze protokoly i szyfrowanie danych.
vulkan spiele https://vulkan-spiele8.com/
888starz на андроид узбекистан скачать: частые проблемы и способы их решения
88starz apk https://androidchity.ru/
нажмите здесь авито отзывы телеграм
пояснения https://spinvodka.com
Your blog is always a highlight of my day
такой публикация отзывов и комментариев для вашего профиля авито
ссылка на сайт услуга написания отзывов на озон
Читать далее накрутка отзывов авито
интернет поднятия рейтинга вайлбериз
перейти на сайт накрутка рейтинга авито
такой https://vodkabet-vbt.com
подробнее публикация отзывов вб
ссылка на сайт авито отзывы за деньги
нажмите накрутка рейтинга авито
Смотреть здесь сайт накрутки авито
W katalogu gier przewazaja klasyczne automaty, nowoczesne video-slty oraz progresywne jackpoty.
vulkanspiele https://vulkan-spiele5.com/
Главная поднятия рейтинга озон
Если возникают проблемы с загрузкой, проверьте подключение к интернету, перезапустите приложение и при необходимости очистите кэш приложения
888старз скачать https://androidchity.ru/
страница накрутка авито рейтинга
выберите ресурсы https://spinvodka.com
опубликовано здесь https://vodkabet-vbt.com/
в этом разделе https://vodkabet-vbt.com/
нажмите здесь продвижения карточки вб
Используйте только официальные каналы загрузки 888starz и не доверяйте сомнительным зеркалам или сторонним программам
888 bet скачать 888 bet скачать.
VulkanSpieles Casino Polska to miejsce, gdzie milosnicy hazardu znajda szeroki wybor gier i atrakcyjnych promocji.
vulkan spiele vulkan spiele.
Перейти на сайт живые отзывы вайлдберриз купить
этот сайт https://vodkabet-vbt.com/
подробнее https://vodkabet.kz/
страница вывод в топ озон
пояснения авито отзывы купить
найти это купить положительные отзывы на авито
нажмите здесь продвижения карточки вб
Источник https://vodkabet.kz
посетить веб-сайт https://vodkabet-vbt.com/
تتضمن التوصيات تنظيم الوقت وتحديد حدود للإنفاق وتجنب المظاهر المدمِّرة للإدمان.
تنزيل 888starz https://rlphealing.com/%d8%aa%d8%ad%d9%85%d9%8a%d9%84-888starz-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-apk-%d9%88%d9%86%d8%b3%d8%ae%d8%a9-ios-%d9%85%d8%b9-%d9%88%d8%a7%d8%ac%d9%87%d8%a9/
сюда https://spinvodka.com
подробнее здесь отзывы озон
каталог накрутка отзывов на карточку вайлдберриз
подробнее https://spinvodka.com/
сайт https://drink.vodkabet-zercalo.com/
кликните сюда авито отзывы за деньги
здесь https://spinvodka.com
здесь сервис для накрутки вб
Смотреть здесь https://vodkabet-vbt.com
зайти на сайт вб отзывы купить
посетить сайт дешёвые отзывы вб
интернет накрутка отзывов на вб с гарантией
здесь услуга написания отзывов на вб
Смотреть здесь сервис для накрутки озон
узнать больше авито отзывы телеграм
посетить веб-сайт увеличение отзывов на вб
перейти на сайт авито отзывы за деньги
ссылка на сайт накрутка отзывов на карточку вб
перенаправляется сюда вывод в топ вайлбериз
узнать больше сайт накрутки отзывов авито
перейти на сайт накрутка вб
Really appreciate your effort in creating valuable content. Looking forward to more posts like this!
нажмите здесь авито отзывы купить
Смотреть здесь заказать отзывы авито
1win bonus
посетить веб-сайт накрутка авито рейтинга
Dodatkowo regulaminy sa przejrzyste, a obsluga klienta dostepna przez caly czas.
Dla nowych graczy przygotowano atrakcyjne bonusy powitalne oraz programy lojalnosciowe.
vulkan spiele https://vulkan-spiele5.com/
Как выбирать зеркала и источники для загрузки 888starz на Android в Узбекистане
скачать 888 старз https://androidchity.ru/
посмотреть в этом разделе поднятия карточки вайлбериз
Nowi uzytkownicy moga skorzystac z bonusow powitalnych oraz z programow lojalnosciowych.
vulkan spiele https://vulkan-spiele-polska.com/
здесь накрутить отзывы вайлбериз
تشمل التوجيهات تنظيم الوقت وتحديد ميزانية دقيقة والابتعاد عن الإدمان والرهانات المفرطة.
888Starz apk https://vpkrubber.com/%d8%a7%d8%a8%d8%af%d8%a3-%d9%85%d8%b9-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-apk-%d9%88ios-%d8%a8%d8%af%d9%84%d9%8a%d9%84/
Скачать 888starz на Android в Узбекистане: рекомендации по выбору официального источника
888 stars скачать https://androidchity.ru/
узнать https://vodkabet.kz/
узнать больше https://vodkabet.kz/
заказать дизайн проект квартиры дизайн интерьера квартиры
этот сайт продвижения карточки вайлдберриз
перенаправляется сюда https://vodkabet-vbt.com
нажмите здесь https://vodkabet.kz
сайт https://vodkabet.kz/
найти это заказать отзывы авито
ссылка на сайт сайт накрутки авито
найти это купить положительные отзывы на авито
узнать больше https://drink.vodkabet-zercalo.com
в этом разделе https://vodkabet-vbt.com
Dostepne sa liczne maszyny, w tym sloty z mozliwoscia filtrowania po tematyce i dostawcy.
vulkan spiele https://vulkanpolska.com/
Как исправлять ошибки установки 888starz на Android в Узбекистане
888starz скачать приложение https://androidchity.ru/
перейти на сайт сайт накрутки авито
узнать больше Здесь авито отзывы
Ayr?ca, eger okunmas? gereken kisisel gelisim kitaplar? konusuyla ilgileniyorsan?z, suraya bak?n. Link burada: https://kendihobim.com/articles/okunmasi-gereken-kisisel-gelisim-kitaplari/
aloe vera cicegi nas?l acar hakk?ndaki yaz?y? cok sevdim. Suradan okuyabilirsiniz: https://evhobisi.com/articles/aloe-vera-cicek-acma-sureci/
здесь авито отзывы телеграм
يقدم القسم الأخير نصائح عملية لزيادة الاستمتاع بتجربة 888starz مع الحفاظ على الأمان.
وكيل 888starz https://localfirst24.de/%d9%82%d9%85-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%a7%d9%84%d8%a2%d9%86-%d9%88%d8%aa%d9%85%d8%aa%d8%b9-%d8%a8%d8%af%d9%84%d9%8a%d9%84-%d8%aa%d8%ab%d8%a8%d9%8a/
Смотреть здесь сайт накрутки отзывов авито
узнать накрутка отзывов на карточки маркетплейсов
нажмите здесь публикация отзывов и комментариев для вашего профиля авито
Подробнее заказать отзывы авито
Interfejs zapewnia intuicyjnosc, a strona szybko sie laduje nawet przy slabym internecie.
vulkanspiele https://vulkanpolska.com/
Используйте только официальные каналы загрузки 888starz и не доверяйте сомнительным зеркалам или сторонним программам
888 старс скачать https://androidchity.ru/
W ofercie znajdziemy klasyczne sloty, zaawansowane wideo automaty oraz gry z progresywnymi nagrodami.
Dostepne sa liczne deale, w tym automaty z filtrowaniem wedlug tematyki i dostawcow.
vulkan spiele https://vulkan-spiele1.com/
Далее следует открыть настройки безопасности, разрешить установку приложений из неизвестных источников и запустить файл APK для начала установки
скачать 888 старс на айфон https://androidchity.ru/
опубликовано здесь https://spinvodka.com/
сюда публикация отзывов и комментариев для вашего профиля авито
ссылка на сайт поднятия карточки вайлбериз
подробнее живые отзывы озон купить
сколько стоит забор из евроштакетника
этот контент услуга написания отзывов авито
Wielu graczy zauwaza prosty proces rejestracji i blyskawiczne wyplaty, co poprawia ogolne wrazenia.
Kolejna zaleta sa liczne turnieje i turnieje z atrakcyjnymi nagrodami, ktore utrzymuja wysoki poziom emocji.
vulkan spiele https://vulkanpolska.com/
Перейти на сайт заказать накрутку отзывов озон
888starz скачать на андроид узбекистан: обзор простого процесса установки и доступности приложения на устройствах под управлением Android в Узбекистане
888starz скачать официальный сайт https://androidchity.ru/
страница https://vodkabet-vbt.com
Источник накрутка вб
ссылка на сайт отзывы за деньги на объявление авито
Смотреть здесь https://vodkabet-vbt.com/
сайт https://drink.vodkabet-zercalo.com
проверить сайт https://vodkabet-vbt.com
зайти на сайт https://spinvodka.com/
этот контент купить положительные отзывы на авито
зайти на сайт сайт накрутки авито
зайти на сайт сайт накрутки авито
Смартфон пришёл именно такой, как я и ожидал. На сайте описание было точным, а менеджер дополнительно ответил на мои вопросы. Заказ обработали быстро, доставили без задержек. Магазин работает честно и профессионально: покупка смартфонов
перенаправляется сюда вайлдберриз отзывы за деньги
сюда поднятия рейтинга озон
How do I subscribe to your blog? Thanks for your help.
другие накрутка отзывов озон
Update: Still using 1Ace after 3 months and honestly I’m pretty satisfied with how things have gone. The platform remains stable, transactions go through without drama, and I haven’t ran into any major issues. Definately sticking with it for now. 1ace login
можно проверить ЗДЕСЬ накрутка рейтинга авито
Следующая страница https://vodkabet-vbt.com
Смотреть здесь сервис для накрутки вайлдберриз
продолжить отзывы авито накрутка
подробнее накрутка рейтинга авито
A neighbor of mine encouraged me to take a look at your blog site couple weeks ago, given that we both love similar stuff and I will need to say I am quite impressed.
опубликовано здесь продвижения карточки вайлдберриз
يركز الختام على أهمية السلوك المسؤول والتحديثات المستمرة لتطبيق 888starz apk.
888starz تحميل https://avtoshop174.ru/2026/02/06/%d8%a7%d8%b3%d8%aa%d9%85%d8%aa%d8%b9-%d8%a8%d9%80-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d9%85%d8%b9-%d8%af%d9%84%d9%8a%d9%84-%d8%a7%d9%84%d8%aa%d8%ab%d8%a8%d9%8a/
Kolejna zaleta sa roznorodne turnieje i konkursy z atrakcyjnymi nagrodami, ktore utrzymuja duze tempo rywalizacji.
W sekcji gier dominuja klasyczne automaty, nowoczesne wideo sloty oraz gry jackpotowe.
vulkan spiele https://vulkanpolska.com/
888starz на андроид узбекистан скачать: первые шаги к загрузке, доступ к APK и выбор источников
888старз скачать https://androidchity.ru/
When are you going to post again? You really entertain me!
здесь https://vodkabet.kz/
Перейти на сайт https://drink.vodkabet-zercalo.com
опубликовано здесь https://spinvodka.com
Pretty nice post. I just stumbled upon your weblog and wanted to say that I’ve really enjoyed surfing around your blog posts. After all I’ll be subscribing in your feed and I am hoping you write again very soon!
Смотреть здесь накрутка отзывов авито
ссылка на сайт авито отзывы за деньги
Clear, concise and easy to access.
Greetings… your blog is very interesting and beautifully written.
Коллеги, кто сомневается, работает ли накрутка ПФ в 2026 году, — прочитайте этот материал. Автор разбирает реальные кейсы и даёт чёткие цифры: цена от 0,8 рубля за клик, примеры бюджетов для разных ниш (стоматология, клининг, автодилер). Мне помогло понять, что это инвестиция, а не расход. Почитайте: https://teletype.in/@pfup/3mo6UGVvR2a
пояснения https://vodkabet-vbt.com
посмотреть на этом сайте https://vodkabet-vbt.com
Смотреть здесь https://spinvodka.com
веб-сайт https://vodkabet.kz/
Thanks for some other great post. Where else may anybody get that kind of information in such an ideal method of writing? I’ve a presentation next week, and I am at the look for such information.
Ponadto dostepne sa jasne zasady i calodobowe wsparcie klienta.
vulkan spiele https://vulkan-spiele4.com/
Устанавливайте обновления 888starz вовремя через автоматический режим или через раздел обновлений, чтобы иметь новые функции
888starz скачать apk https://androidchity.ru/
Dla nowych graczy proponowane sa kuszace bonusy na start i systemy nagrod za czeste gry.
vulkanspiele https://vulkan-spiele4.com/
وتُبيّن كذلك كيفية الوصول إلى الدعم الفني وخيارات الإبلاغ عن أي مشاكل تواجه المستخدمين.
تحميل 888starz للايفون https://tatogy.com/888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-apk-%d9%88%d9%86%d8%b3%d8%ae%d8%a9-ios-%d9%85%d8%b9-%d8%b4%d8%b1%d8%ad-%d8%aa%d8%a7/
продолжить https://vodkabet.kz/
Используйте только официальные каналы загрузки 888starz и не доверяйте сомнительным зеркалам или сторонним программам
888bet skachat 888bet skachat.
ссылка на сайт https://vodkabet.kz/
has anyone here tried dragonmoney228.casino yet? im looking for something new and i heard its pretty solid but wanted to know what u guys think bout it? is it legit or teh interface kinda sucks? ive heard alot of mixed feedback so wondering if someone can reccomend it or if i should look elsewhere Dragon Money офциаильный сайт казино
Смотреть здесь https://drink.vodkabet-zercalo.com/
W katalogu gier przewazaja klasyczne automaty, nowoczesne video-slty oraz progresywne jackpoty.
vulkanspiele https://vulkanpoland.com/
Обзор меню и функционала 888starz на Android для пользователей из Узбекистана
скачать 888starz на андроид https://androidchity.ru/
Подробнее https://drink.vodkabet-zercalo.com/
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Кстати, если вас интересует Эффективный уход за инструментами для резьбы, посмотрите сюда.
Смотрите сами:
https://fixora.ru/%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%bf%d0%be-%d1%83%d1%85%d0%be%d0%b4%d1%83-%d0%b7%d0%b0-%d0%b8%d0%bd%d1%81%d1%82%d1%80%d1%83%d0%bc%d0%b5%d0%bd%d1%82%d0%b0%d0%bc%d0%b8-%d0%b4%d0%bb%d1%8f-%d1%80/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
Ochrona graczy to priorytet, uzywane sa najnowsze protokoly i szyfrowanie danych.
vulkan spiele [url=http://www.vulkanspiele4.com/]https://vulkanspiele4.com/[/url]
Зачем и как использовать VPN при скачивании 888starz на Android в Узбекистане
888 stars скачать 888 stars скачать.
на этом сайте https://vodkabet.kz/
узнать больше https://drink.vodkabet-zercalo.com/
узнать https://spinvodka.com
Wielu graczy chwali prostote rejestracji oraz szybkie wyplaty, co wplywa na satysfakcje uzytkownikow.
vulkanspiele https://vulkan-spiele3.com/
888starz на андроид узбекистан скачать: частые проблемы и способы их решения
888starz bet скачать https://androidchity.ru/
يعطي القسم الأول لمحة تعريفية عن المنصة وتاريخها مع رصد القواعد الأساسية للاستخدام.
888starz تحميل https://imenkia.ir/%d9%82%d9%85-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%a7%d9%84%d8%a2%d9%86-%d9%88%d8%aa%d9%85%d8%aa%d8%b9-%d8%a8%d8%af%d9%84%d9%8a%d9%84-%d8%aa%d8%ab%d8%a8%d9%8a/
أيضاً يشمل شرحاً عملياً لطريقة تحميل 888starz apk وتثبيته، مع نصائح لتعزيز الأمان الرقمي.
888starz برومو كود https://angelina-bouquet.com/888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%af%d9%84%d9%8a%d9%84-%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-apk-android-%d9%88ios-%d8%a8%d8%a7%d9%84%d9%83%d8%a7%d9%85/
my response Paxful wallet
The world of top online casinos Pakistan offers incredible opportunities for players. You can find a huge variety of slots and table games with high RTP. | New users can often claim generous welcome packages and loyalty rewards. | Professional dealers and high-quality streams create a real atmosphere. ] Check the latest rankings and start your journey today!
сюда кракен что там продают
تنظم الفقرات ثلاث أسئلة أساسية وتُجيب عنها بصورة صريحة.
تنزيل تطبيق 888starz https://mybluegreece.com/%d8%aa%d9%86%d8%b2%d9%8a%d9%84-888starz-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-apk-android-%d9%88ios-%d9%85%d8%b9-%d8%b4%d8%b1%d8%ad-%d8%b4%d8%a7%d9%85%d9%84-%d9%88%d8%b3%d9%87%d9%84/
click to read mt gox payout date
Interfejs zapewnia intuicyjnosc, a strona szybko sie laduje nawet przy slabym internecie.
vulkanspiele vulkanspiele.
read the article Nifty Gateway NFT
Проверка совместимости 888starz на Android в Узбекистане: необходимые параметры устройства
888star apk https://androidchity.ru/
Wielu graczy zauwaza prosty proces rejestracji i blyskawiczne wyplaty, co poprawia ogolne wrazenia.
Kolejna zaleta sa liczne turnieje i turnieje z atrakcyjnymi nagrodami, ktore utrzymuja wysoki poziom emocji.
vulkanspiele https://vulkan-spiele4.com/
Dostepne sa liczne maszyny, w tym sloty z mozliwoscia filtrowania po tematyce i dostawcy.
vulkanspiele vulkanspiele.
تُبيّن الفقرات التالية آليات التسجيل وتدابير الأمان الأساسية التي يجب اتباعها.
888starz ios https://hifrequency.live/community/profile/kristoferhenn4/
Создание аккаунта и первая настройка в 888starz на Android в Узбекистане
скачать 888 на андроид https://androidchity.ru/
каталог кракен зеркало
Распространенные проблемы при скачивании 888starz на Android в Узбекистане и пути их устранения
888bet skachat https://androidchity.ru/
посмотреть в этом разделе кракeн сайт ссылка
visit site Nifty Gateway NFT
see here Paxful wallet
تتضمن القاعدة الرابعة أمثلة تطبيقية وخلاصة قصيرة تتيح للقارئ فهم المحتوى بسرعة.
888starz برومو كود https://arabesqueguide.net/888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-apk-%d9%84%d9%84%d8%a3%d9%86%d8%af%d8%b1%d9%88%d9%8a%d8%af-%d9%88%d9%86%d8%b3%d8%ae/
check this site out payward trading ltd
more mt gox news
Visit This Link Nifty Gateway NFT
Ponadto dostepne sa jasne zasady i calodobowe wsparcie klienta.
vulkanspiele https://vulkan-spiele-polska.com/
Как получить 888starz на Android в Узбекистане: идеи по загрузке файла APK и безопасной установке
888starz скачать официальный сайт https://androidchity.ru/
страница kraken клир ссылка
best site mt gox payout
blog link mt gox news
Ребята, статья РїСЂРѕ SEO-продвижение РѕС‚ ITB Company, РЅРѕ РЅР° сайте СЃ игровыми новостями — неожиданно, РЅРѕ полезно. Автор объясняет, почему для бизнеса РІ Екатеринбурге важно быть РІ топе РїРѕРёСЃРєР°, Рё как грамотная оптимизация влияет РЅР° СЂРѕСЃС‚ продаж. Есть блок РїСЂРѕ долгосрочные результаты. Рнтересно: https://k0r0b0chka.ru/kvesty/watch-dogs-2-na-pk-pokazali-kak-shvatit-besplatno/
a knockout post payward trading limited
go exchange mt gox
опубликовано здесь кракен ссылка зеркало kraken one com
VulkanSpieles Casino Polska to osrodek, w ktorym pasjonaci hazardu moga cieszyc sie bogata oferta gier i kuszacych bonusow.
vulkan spiele https://vulkanpolska.com/
Устанавливайте обновления 888starz вовремя через автоматический режим или через раздел обновлений, чтобы иметь новые функции
888starz скачать официальный версия на андроид https://androidchity.ru/
Bu arada soyleyeyim, eger ac?k mavi renk konusuyla ilgileniyorsan?z, suraya bak?n. Link burada: https://evhobisi.com/articles/acik-mavi-ev-boyasi-renk-secimi/
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
Зацепил материал про Фигурная резьба по дереву: от новичка до мастера.
Вот, можете почитать:
https://fixora.ru/%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80-%d0%ba%d0%bb%d0%b0%d1%81%d1%81-%d0%bf%d0%be-%d1%84%d0%b8%d0%b3%d1%83%d1%80%d0%bd%d0%be%d0%b9-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d0%b5-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
Read More Here Paxful wallet
navigate to this website Vauld India
learn this here now Paxful app
this post Buy NFT with credit card
هذه القراءة تزوّدك بمعلومات دقيقة عن 888starz apk وكيفية تشغيله بطريقة آمنة ومثمرة.
تطبيق 888starz https://playamicasa.com/uncategorized/888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-apk-%d9%88%d9%86%d8%b3%d8%ae%d8%a9-ios-%d9%85%d8%b9-%d8%b4%d8%b1%d8%ad-%d8%aa%d8%a7/
Your posts are always so relatable and relevant to my life It’s like you know exactly what I need to hear at the right time
I love how this blog celebrates diversity and inclusivity It’s a reminder that we are all unique and should embrace our differences
browse around these guys mtgox payout date
تفصّل الفقرة الثانية خطوات التسجيل وإعداد الحساب بشكل صحيح.
888starz تنزيل https://noktaestates.com/%d8%ac%d8%b1%d8%a8-%d8%a8%d9%86%d9%81%d8%b3%d9%83-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%a8%d8%ae%d8%b7%d9%88%d8%a7%d8%aa-%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-%d8%b3/
their explanation mt.gox
go to website Paxful login
Australia Tobacconist Hub
The Contradiction of an Australian Cigarette Website: Health Advice vs. Sales
A website has appeared offering Australians the option to purchase cigarettes and tobacco with delivery to their door. The website, which operates under the name Australia Tobacconist Hub, shows a clear inconsistency: aggressive marketing of budget tobacco products alongside official notices about the health risks of tobacco use.
Product Range
The platform’s primary customer base is people who smoke trying to cut costs. Key items on the price list include:
Double Happiness brand — $190 per block (10 packs x 20’s)
Manchester Sapphire Blue (Dubai Edition) — $220 per carton
Manchester Special Edition Flow Red (Dubai Version) — $250 per block
Manchester Blue Crush – Dubai Edition — $250 per block
Dunhill Blue – UK Edition — $220 per block
Dunhill Red – UK Edition — $190 per block
Benson & Hedges Gold — $160 per block
Zhongnanhai (???) — $180 per carton
The seller emphasizes “competitive prices” (Cheap Tobacco Australia) and the offering of well-known names such as Marlboro, Manchester, Bossku, and Double Happiness.
Logistics and Payment
The seller promises fast, reliable, and discreet delivery across Australia (Fast Tobacco Delivery Australia). They say they process bank transfers, USDT (cryptocurrency), PayPal, Wise, and other methods. Customer interaction is handled via WhatsApp, email, and other messaging apps — a typical practice in the unlicensed sector for online tobacco sales.
The Contradiction in Messaging
Curiously enough, the very same site that sells cigarettes (while officially noting that it is illegal to sell tobacco products to minors) also features a “STOP SMOKING” image with an drawing of lungs crossed by a cigarette.
In a part named “STOP TOBACCO”, the text says:
“Giving up smoking is hard, but each attempt matters. Within minutes, your body starts recovering — and over time, your health and vitality return. Let’s start today!”
This public health message is placed near a product catalogue selling cartons for $160–$250 and a prompt to buy: “Purchase cigarettes online in Australia for the lowest price.” Such mixed communication is common of illegal or semi-legal cigarette sellers that pretend to care about public health while still pushing harmful goods.
Legal Issues
The text leaves unclear whether the seller has a valid Australian retail license for tobacco. Australia is known for having some of the most severe cigarette regulations globally, including plain packaging requirements and extremely high excise taxes. The promise of low-cost smokes — especially “Dubai Edition” or “UK Version” — often indicates untaxed, smuggled, or counterfeit goods.
Conclusion
The website in question is a classic case of a shadow online tobacco business. It profits from smokers’ wish for cheaper prices in the context of Australia’s high legal tobacco taxes, while masking itself with empty health warnings and claims of customer care. Potential buyers should remember that buying unlicensed tobacco carries not only legal risks but also a total absence of any assurance regarding product safety and authenticity.
address mt gox repayment
Get More Information Www paxful com login
يُقدِّم هذا القسم الأول تعريفاً عاماً بالمنصة وتاريخها وبعض القواعد الأساسية التي تحكم الاستخدام.
تنزيل برنامج 888starz https://geokofola.geopivko.cz/forum/profile/carolynkelsey58/
в этом разделе krakеn darknet market зеркало
Source Vauld crypto
Looking at best Pakistani casino sites is rapidly growing in the region right now. You can find a huge variety of slots and table games with high RTP. | New users can often claim generous welcome packages and loyalty rewards. | Choosing a licensed operator ensures a fair and transparent gaming process. ] Don’t miss your chance to win big on a trusted platform.
подробнее кракен официальный сайт kraken clear com
click site Nifty login
The current market of best live casinos Pakistan offers incredible opportunities for players. The security of transactions and fast payouts are guaranteed on these platforms. | Most sites provide mobile-friendly interfaces and 24/7 customer support. | Professional dealers and high-quality streams create a real atmosphere. ] Don’t miss your chance to win big on a trusted platform.
يُقدِّم هذا القسم الأول تعريفاً عاماً بالمنصة وتاريخها وبعض القواعد الأساسية التي تحكم الاستخدام.
888starz bet https://hellierndt.com/%d8%aa%d8%ad%d9%85%d9%8a%d9%84-888starz-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-apk-%d9%84%d9%84%d8%a3%d9%86%d8%af%d8%b1%d9%88%d9%8a%d8%af-%d9%88%d8%aa%d8%ab%d8%a8/
Woah this is just an insane amount of information, must of taken ages to compile so thanx so much for just sharing it with all of us. If your ever in any need of related information, just check out my own site!
يتطرق النص إلى مزايا التطبيق وميزاته الأساسية التي تجعله خياراً متميزاً لمحبي الألعاب والرهانات عبر الإنترنت.
تحميل 888starz للاندرويد تحميل 888starz للاندرويد.
Всем привет! Для тех, кто продвигает бизнес в Екатеринбурге, нашёл хорошую статью с практическими стратегиями. Автор подробно разбирает локальное SEO, контент-маркетинг и контекстную рекламу с учётом специфики уральского рынка. Особенно полезен раздел про работу с отзывами и геотаргетинг. Рекомендую: https://avto-dom-tumen.ru/stati/prodvizhenie-sajtov-v-ekaterinburge-jeffektivnye-strategii-dlja-uspeshnogo-onlajn-prisutstvija/
Bu arada soyleyeyim, eger japon yap?st?r?c?s?n? ne c?kar?r konusuyla ilgileniyorsan?z, buray? inceleyin. Suradan okuyabilirsiniz: https://kendimacera.com/articles/kurumus-japon-yapistiricisi-cikarma-yontemleri/
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
По теме “Лучшие практики безопасности при работе с резьбой”, нашел много полезного.
Ссылка ниже:
https://fixora.ru/%d1%81%d0%be%d0%b2%d0%b5%d1%82%d1%8b-%d0%bf%d0%be-%d0%b1%d0%b5%d0%b7%d0%be%d0%bf%d0%b0%d1%81%d0%bd%d0%be%d1%81%d1%82%d0%b8-%d0%bf%d1%80%d0%b8-%d1%80%d0%b0%d0%b1%d0%be%d1%82%d0%b5-%d1%81-%d1%80%d0%b5/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
Хочу выделить раздел про Советы мастеров по плетению корзин из лозы.
Вот, делюсь ссылкой:
https://fixora.ru/%d0%b8%d0%bd%d1%81%d1%82%d1%80%d1%83%d0%bc%d0%b5%d0%bd%d1%82%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%ba%d0%be%d1%80%d0%b7%d0%b8%d0%bd-%d0%b8%d0%b7-%d0%bb%d0%be/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
my link Nifty Gateway NFT
يستعرض المقال الميزات الأساسية لتطبيق 888starz apk وما يجعلها فريدة مقارنة بالتطبيقات المشابهة في السوق.
تطبيق 888starz https://aplusdigitalsolutions.com/888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-apk-%d8%b9%d9%84%d9%89-%d8%a3%d8%ac%d9%87%d8%b2%d8%a9-android-%d9%88%d8%aa%d9%86%d8%b2/
great site Vauld restructuring
try these out Www paxful com login
https://bet365-bet.com.co/
Bet365 Colombia dispone de un aval de Coljuegos con el fin de operar legalmente en el pais, brindando un casino en linea confiable que comprende una amplia variedad de slots, juegos de mesa y otras alternativas de juego, todo sustentado por el conocimiento mundial de la firma de apuestas creada en el Reino Unido en 2000.
you could try these out Vauld review
هذه القراءة تزوّدك بمعلومات دقيقة عن 888starz apk وكيفية تشغيله بطريقة آمنة ومثمرة.
تحميل تطبيق 888starz https://aromaesaboaria.com/%d8%a7%d9%86%d8%b7%d9%84%d9%82-%d8%a7%d9%84%d8%a2%d9%86-%d9%85%d8%b9-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%af%d9%84%d9%8a%d9%84-%d8%a7%d9%84%d8%aa%d8%ab/
https://bwin-bet.com.co/
Bwin Bet es un casino en linea y plataforma de apuestas deportivas que opera en Colombia a partir de 2026 , actuando con el respaldo de Coljuegos , ofreciendo una experiencia regulada y segura a los apostadores .
view publisher site Paxful login
сайт kraken ссылка vk
helpful resources https://daobase.info
Добро пожаловать в мир плетения корзин из лозы, где каждый сможет найти советы от признанных мастеров!
Особенно понравился материал про Истории успеха и тренды мастеров плетения из лозы.
Вот, делюсь ссылкой:
https://fixora.ru/%d0%b8%d1%81%d1%82%d0%be%d1%80%d0%b8%d0%b8-%d1%83%d1%81%d0%bf%d0%b5%d1%85%d0%b0-%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80%d0%be%d0%b2-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%b8%d0%b7-%d0%bb/
Надеемся, эти советы помогут вам в создании великолепных корзин из лозы.
you can check here Paxful log in
Честно, всегда боялся, что Яндекс заблокирует сайт за накрутку. В статье автор успокаивает: «Яндекс не банит за накрутку с 2020 года». Приводит аргументы и объясняет, как работает антифрод. Теперь понятно, что главное — не резкие скачки и качественные клики. Почитайте, чтобы развеять страхи: https://teletype.in/@pfup/3mo6UGVvR2a
official source https://letsexchange.cc
تشمل هذه النصائح إدارة الوقت وتحديد ميزانية والابتعاد عن الممارسات المبالغ فيها.
تنزيل برنامج 888starz https://agosto.in/?p=6048/
تتكون الفقرات من ثلاثة أسئلة رئيسية وتجيب عليها بوضوح.
تحميل 888starz https://ba-stories.com/888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-apk-%d8%b9%d9%84%d9%89-%d8%a3%d8%ac%d9%87%d8%b2%d8%a9-android-%d9%88%d8%aa%d9%86%d8%b2/
look at more info Nifty Gateway
يعطي القسم الأول لمحة تعريفية عن المنصة وتاريخها مع رصد القواعد الأساسية للاستخدام.
888starz app https://profexpert.pl/%d8%aa%d9%86%d8%b2%d9%8a%d9%84-888starz-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-apk-android-%d9%88%d9%86%d8%b3%d8%ae%d8%a9-ios-%d9%85%d8%b9-%d8%b4%d8%b1%d8%ad-%d8%a7%d9%84%d8%aa%d8%ab%d8%a8%d9%8a/?v=0b3b97fa6688/
more information https://anycoindirect.me/
أيضاً يشمل شرحاً عملياً لطريقة تحميل 888starz apk وتثبيته، مع نصائح لتعزيز الأمان الرقمي.
888starz برومو كود https://thedebils.club/%d8%a7%d8%a8%d8%af%d8%a3-%d9%81%d9%88%d8%b1%d8%a7%d9%8b-%d8%a8%d9%80-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%a8%d8%ae%d8%b7%d9%88%d8%a7%d8%aa-%d8%aa%d9%86%d8%b2-2/
discover this https://yomix.biz
تتكون الفقرات من ثلاثة أسئلة رئيسية وتجيب عليها بوضوح.
تحميل 888starz https://subhaitsolution.com/2026/02/06/888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-apk-%d9%88ios-%d9%85%d8%b9-%d8%aa%d9%81%d8%a7%d8%b5%d9%8a%d9%84-%d8%a7%d9%84%d8%aa/
Our communities really need to deal with this.
our website https://swaplab.io/
Get the facts https://daobase.io
Hiya, I am really glad I have found this information. Nowadays bloggers publish only about gossip and net stuff and this is actually frustrating.
Your positivity and enthusiasm are infectious It’s clear that you are truly passionate about what you do and it’s inspiring to see
Your blog is a great source of positivity and inspiration in a world filled with negativity Thank you for making a difference
I truly admire how you tackle difficult topics and address them in a respectful and thought-provoking manner
I had highly recommend this blog to my good friend, it’s so good
There are some serious financial ramifications here.
Hi there, just became aware of your blog through Google, and found that it’s truly informative. It’s important to cover these trends.
thank, I thoroughly enjoyed reading your article. I really appreciate your wonderful knowledge and the time you put into educating the rest of us.
Bu arada soyleyeyim, eger kullan?sl? dar kucuk banyo modelleri konusuyla ilgileniyorsan?z, suraya bak?n. Iste link: https://kendihobim.com/articles/kucuk-banyo-tasarim-fikirleri/
her explanation https://anycoindirect.me
navigate here https://tornadocash.app
click here for more https://mixmy.money/
you could check here https://daobase.online
i was reading this https://letsexchange.cc/
browse around this website https://mixmy.money
Clicking Here https://anycoindirect.me
click https://bitmix.app
helpful hints https://tornadocash.app
يتضمن المقال خطوات عملية لتحميل وتثبيت 888starz apk إضافة إلى إجراءات حماية للمستخدمين.
تنزيل تطبيق 888starz https://rlphealing.com/%d8%a7%d9%86%d8%b7%d9%84%d9%82-%d8%a7%d9%84%d8%a2%d9%86-%d8%a8%d8%aa%d8%ad%d9%85%d9%8a%d9%84-888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%b9%d8%a8%d8%b1-apk-%d9%88ios/
Read Full Article https://yomix.biz
يعطي القسم الأول لمحة تعريفية عن المنصة وتاريخها مع رصد القواعد الأساسية للاستخدام.
تحميل برنامج 888starz https://gasbillcheckonline.com/888starz-%d8%aa%d9%86%d8%b2%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%b4%d8%b1%d8%ad-%d8%ae%d8%b7%d9%88%d8%a7%d8%aa-%d8%aa%d8%ab%d8%a8%d9%8a%d8%aa-apk-android-%d9%88%d8%aa%d8%ad%d9%85/
pop over to these guys https://daobase.io
Beneficial Blog! I had been simply just debating that there are plenty of screwy results at this issue you now purely replaced my personal belief. Thank you an excellent write-up.
Хотите блеснуть своим мастерством лозоплетения? Воспользуйтесь советами профессионалов!
По теме “Мастерство плетения из лозы: традиции и инновации”, есть отличная статья.
Смотрите сами:
https://fixora.ru/%d0%b8%d1%81%d1%82%d0%be%d1%80%d0%b8%d1%8f-%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80%d0%b0-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%b8%d0%b7-%d0%bb%d0%be%d0%b7%d1%8b/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
“evde ecza dolab? yap?m?” konusu icin mukemmel bir kaynak var. Iste link: https://kendifikirler.com/articles/evde-ecza-dolabi-yapimi/
Awesome post. It’s so good to see someone taking the time to share this information
learn the facts here now https://daobase.info
يقدم القسم الأخير نصائح عملية لزيادة الاستمتاع بتجربة 888starz مع الحفاظ على الأمان.
برومو كود 888starz https://cthati.com/888starz-%d8%aa%d8%ad%d9%85%d9%8a%d9%84-%d9%81%d9%8a-%d9%85%d8%b5%d8%b1-%d8%aa%d8%b7%d8%a8%d9%8a%d9%82-apk-%d9%84%d9%84%d8%a3%d9%86%d8%af%d8%b1%d9%88%d9%8a%d8%af-%d9%88%d9%86%d8%b3%d8%ae/
This website has lots of really useful stuff on it. Thanks for informing me.
These kind of posts are always inspiring and I prefer to read quality content so I happy to find many good point here in the post. writing is simply wonderful! thank you for the post
Easily, the post is really the greatest on this laudable topic. I concur with your conclusions and will thirstily look forward to your future updates. Saying thank will not just be sufficient, for the wonderful c lucidity in your writing. I will instantly grab your rss feed to stay privy of any updates. Solid work and much success in your business enterprise!
I Am Going To have to come back again when my course load lets up – however I am taking your Rss feed so i can go through your site offline. Thanks.
advice https://tornadocash.app
تشمل التوجيهات تنظيم الوقت وتحديد ميزانية دقيقة والابتعاد عن الإدمان والرهانات المفرطة.
تطبيق 888starz تطبيق 888starz.
Лучшее путешествие https://dzhip-tury-krym.ru горы, каньоны и побережье. Увлекательные маршруты, опытные гиды и яркие впечатления от путешествий по Крыму.
את שאריות הזרע. דרך הקיר הדק של הנרתיק הרגשתי את הזין של דימה עובד בפי הטבעת ופועם. זה הדליק אותי בפראות. התחלתי לנשק אותה על שפתיים מושחתות. כשסרגיי הוציא מהם את הזין שלו. הגברנו ונשקתי אותה מאחורי אוזנה. אני אעשה את זה בעצמי. משכתי לאט את חולצת הטריקו שלה, אחר כך את הג ‘ ינס, והשארתי אותה בתחתוני התחרה והחזייה שלה. התחת שלה, עגול, קופצני, נראה כאילו נוצר https://analogousmusic.com/
view website https://anycoindirect.me/
Do you trade cryptocurrencies? bitkelt trade platform automate your transactions and earn passive income. Smart algorithms analyze the market and help you make decisions. Increase your income and reduce risks with modern technology.
try this https://bitmix.app/
Looking at best live casinos Pakistan offers incredible opportunities for players. The security of transactions and fast payouts are guaranteed on these platforms. | Most sites provide mobile-friendly interfaces and 24/7 customer support. | Professional dealers and high-quality streams create a real atmosphere. ] Check the latest rankings and start your journey today!
The world of Pakistani online gambling sites offers incredible opportunities for players. The security of transactions and fast payouts are guaranteed on these platforms. | New users can often claim generous welcome packages and loyalty rewards. | Professional dealers and high-quality streams create a real atmosphere. ] Check the latest rankings and start your journey today!
Запускал бизнес и хотел сразу начать с нормального учёта, а не переделывать потом. Выбрал 1С УНФ как готовое решение на платформе 1С:Предприятие. Не пришлось ничего допиливать. учёт товаров и склада
Do you trade cryptocurrencies? official website bitkelttrade automate your transactions and earn passive income. Smart algorithms analyze the market and help you make decisions. Increase your income and reduce risks with modern technology.
The world of real money casino Pakistan offers incredible opportunities for players. The security of transactions and fast payouts are guaranteed on these platforms. | Most sites provide mobile-friendly interfaces and 24/7 customer support. | Professional dealers and high-quality streams create a real atmosphere. ] Don’t miss your chance to win big on a trusted platform.
Wow, amazing blog layout! How long have you been blogging for? you made blogging look easy. The overall look of your site is great, as well as the content!
I imagine so. Very good stuff, I agree totally.
Хотите блеснуть своим мастерством лозоплетения? Воспользуйтесь советами профессионалов!
По теме “Советы по хранению материалов для лозоплетения”, там просто кладезь информации.
Ссылка ниже:
https://fixora.ru/%d0%ba%d0%b0%d0%ba-%d1%85%d1%80%d0%b0%d0%bd%d0%b8%d1%82%d1%8c-%d0%bc%d0%b0%d1%82%d0%b5%d1%80%d0%b8%d0%b0%d0%bb%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%b8%d0%b7/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
“sut nas?l mayalan?r” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Iste link: https://hobiprojesi.com/articles/evde-yogurt-mayalama-yontemleri/
Вопросы поискового продвижения и роли контента в ранжировании детально рассмотрены в материале: https://rosorujie.ru/2026/04/prodvizhenie-sajtov-iskusstvo-i-nauka-uspeha-v-onlajn-mire/
https://mhp.ooo/products/zobilan
The world of best live casinos Pakistan offers incredible opportunities for players. The security of transactions and fast payouts are guaranteed on these platforms. | Most sites provide mobile-friendly interfaces and 24/7 customer support. | Choosing a licensed operator ensures a fair and transparent gaming process. ] Don’t miss your chance to win big on a trusted platform.
try these out paycor login
see this paycor login my account
visit here paycor login
visit this site paycor
visit their website paycor log in
learn the facts here now paycor.com login
check my blog paycor login
YOURURL.com paycor login
visit here paycor log in
Recommended Site paycor employee login
additional reading paycor sign in account
see it here paycor login employee
you could check here paycor login
see here paycor login
navigate here paycor sign in account
Рффективные методы привлечения органического трафика Рё повышения видимости сайта описаны здесь: https://volkhp.ru/stati/prodvizhenie-sajtov-iskusstvo-i-nauka-uspeha-v-cifrovom-mire/
official source paycor login
Go Here paycor login
more information paycor login
view publisher site paycor login
check out here paycor login
our website paycor
Website paycor login
discover here paycor login
Extra resources paycor log in
check my blog paycor login my account
navigate to this web-site paycor login
click here to investigate paycor login employee
Go Here paycor login
browse around this site paycor sign in account
look at here paycor login
see this paycor login
Continued paycor.com
look at here now paycor login
visite site paycor employee login
Go Here paycor log in
find this paycor.com
explanation paycor employee login
over at this website paycor login
The current market of best online casinos Pakistan offers incredible opportunities for players. The security of transactions and fast payouts are guaranteed on these platforms. | Most sites provide mobile-friendly interfaces and 24/7 customer support. | Choosing a licensed operator ensures a fair and transparent gaming process. ] Don’t miss your chance to win big on a trusted platform.
look at this site paycor login
look at this now paycor log in
useful site paycor login
YOURURL.com paycor login
why not check here paycor login
company website paycor login
find out here now paycor login my account
Check This Out paycor login
you could try here paycor login
check my source paycor employee login
click here to read paycor log in
Click Here paycor login
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Хочу выделить раздел про Мастерство плетения из лозы: традиции и инновации.
Ссылка ниже:
https://fixora.ru/%d0%b8%d1%81%d1%82%d0%be%d1%80%d0%b8%d1%8f-%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80%d0%b0-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%b8%d0%b7-%d0%bb%d0%be%d0%b7%d1%8b/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
click this paycor login
see here paycor.com login
see this site paycor
где можно сделать флаг на заказ флаг с принтом на заказ
you can try here paycor.com login
basics paycor login
go to my blog paycor login
his response paycor
see page paycor login
Read Full Report paycor.com
see paycor login
YOURURL.com paycor login
read the article paycor employee login
check my reference paycor employee login
more paycor employee login
Continue paycor employee login
company website paycor login my account
internet paycor login
site web paycor login
my blog paycor employee login
additional reading paycor log in
click to investigate paycor login
look at here paycor login
see this website paycor login
go to this web-site paycor login
Awesome post. It’s so good to see someone taking the time to share this information
useful content paycor.com
Look At This paycor login
I truly appreciate this post. I have been looking everywhere for this! Thank goodness I found it on Bing. You have made my day! Thank you again
Visit Website paycor
visit this website paycor login my account
blog here paycor login
best site paycor login
У нас мелкосерийное производство. Раньше производственные планы и бюджет вели в Excel. После перехода на нормальную систему учёт стал точным и прозрачным. программа для управления фирмой
Nice Post. It’s really a very good article. I noticed all your important points. Thanks.
you could try these out paycor login
Bu arada soyleyeyim, eger kot kokusu nas?l gecer konusuyla ilgileniyorsan?z, suraya bak?n. Iste link: https://hobiprojesi.com/articles/kot-kokusu-nasil-giderilir/
Задумываетесь над плетением корзин? Узнайте, что советуют опытные мастера!
Для тех, кто ищет информацию по теме “Эксклюзивные техники резьбы по дереву: советы и тренды 2024”, нашел много полезного.
Вот, делюсь ссылкой:
https://fixora.ru/%d1%80%d0%b5%d0%b4%d0%ba%d0%b8%d0%b5-%d1%82%d0%b5%d1%85%d0%bd%d0%b8%d0%ba%d0%b8-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
I am glad to be a visitor of this thoroughgoing web blog ! , regards for this rare information! .
useful content paycor.com
read review paycor login my account
click this link here now paycor login
my response paycor login
yo ngl this platform lowkey slaps, interface is clean fr and everything works smooth tbh, imo worth checkin out code promo 7signs
Check This Out paycor login
hop over to here paycor login
Full Article paycor sign in account
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
По теме “Советы по хранению материалов для лозоплетения”, нашел много полезного.
Ссылка ниже:
https://fixora.ru/%d0%ba%d0%b0%d0%ba-%d1%85%d1%80%d0%b0%d0%bd%d0%b8%d1%82%d1%8c-%d0%bc%d0%b0%d1%82%d0%b5%d1%80%d0%b8%d0%b0%d0%bb%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%b8%d0%b7/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
“dusakabin kuflu silikon temizligi” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Kendiniz gorun: https://fikirdronu.com/articles/dusakabin-silikon-temizleme-pratik-yontemler/
Great blog right here! You seem to put a significant amount of material on the site rather quickly.
узнать больше кракен онион ссылка kraken one com
ссылка на сайт Работа для всех
здесь kraken darknet market ссылка shkafssylka ru
подробнее кракен ссылка onion kraken one com
нажмите здесь razer kraken сайт
посмотреть на этом сайте кракен сайт тор ссылка
проверить сайт ссылка на krakеn торговая площадка
такой Курьерская доставка
нажмите здесь Легкие деньги
узнать рабочие ссылки кракен
перейдите на этот сайт ссылка на kraken торговая площадка
проверить сайт razer kraken сайт
подробнее Быстрый заработок
содержание реклама кракен москва сити
кликните сюда kraken ссылка зеркало рабочее kraken2web com
нажмите здесь Работа в одном районе
выберите ресурсы Работа в одном районе
веб-сайт сайт кракен kraken darknet top
узнать больше Быстрый заработок
Makes sense to me.
узнать больше купоны кракен
Источник Работа со свободным графиком
Хочешь оригинальную подушку? подушки дакимакура аниме комфорт и уют для сна. Длинная форма, мягкий наполнитель и стильные принты. Отлично подходит для отдыха и расслабления.
узнать больше Здесь как восстановить кракен
веб-сайт Высокий доход за несколько часов
здесь Работа с телефоном
Читать далее Пешая доставка
на этом сайте kraken darknet market сайт
нажмите, чтобы подробнее Работа 3-4 часа в день
узнать больше Высокий доход за несколько часов
посмотреть на этом сайте Легкие деньги
Следующая страница Обучение перед работой
посмотреть в этом разделе как зайти на сайт кракен
нажмите, чтобы подробнее Наставник 24/7
нажмите здесь Работа с высоким заработком
I dont think Ive caught all the angles of this subject the way youve pointed them out. Youre a true star, a rock star man. Youve got so much to say and know so much about the subject that I think you should just teach a class about it
на этом сайте кракен сайт что это
сюда Работа по всему городу
посетить веб-сайт кракен клир ссылка
нажмите здесь кракен сайт зеркала
посмотреть в этом разделе только через торрент кракен
Перейти на сайт Работа по всему городу
другие кракен ссылка vk
веб-сайт Обучение перед работой
посмотреть в этом разделе Работа для всех
узнать больше кракен москва
страница площадка кракен ссылка kraken clear com
нажмите, чтобы подробнее кракен что за сайт
подробнее Легкие деньги
здесь kraken onion ссылка kraken2web com
ссылка на сайт kraken ссылка зеркало
Подробнее здесь рабочее зеркало кракен
Источник сайт кракен kraken darknet top
веб-сайт кракен ссылка тор
Подробнее только через торрент кракен
посетить сайт Высокий доход за несколько часов
зайти на сайт диспуты кракен
опубликовано здесь Работа по всему городу
узнать больше Обучение перед работой
нажмите здесь Работа в одном районе
Продолжение кракен тор
на этом сайте Работа 3-4 часа в день
1 paket maya kac kas?k hakk?ndaki yaz?y? gercekten begendim. Kendiniz gorun: https://kendimacera.com/articles/sut-mayasi-kullanimi-kac-kasik-maya-eklenmeli/
взгляните на сайте здесь кракен маркет
посмотреть в этом разделе Работа со свободным графиком
в этом разделе kraken зеркало тор kraken2web com
ссылка на сайт Работа 3-4 часа в день
Узнать больше площадка кракен ссылка kraken clear com
зайти на сайт https://deevki.ru/
смотреть здесь Работа по всему городу
сюда kraken даркнет ссылка
опубликовано здесь кракен ссылка тор
ссылка на сайт https://deevki.ru
Подробнее здесь kraken darknet market зеркало
For anyone who needs to know, bigbazzi is legit but set your own limits before you start because its easy to lose track of time, definately not one to play while ur tired or frustrated
опубликовано здесь кракен сайт что это
нажмите, чтобы подробнее https://deevki.ru/
Перейти на сайт кракен торговая площадка
нажмите, чтобы подробнее https://deevki.ru
подробнее кракен текст рекламы
здесь кракен market ссылка
здесь кракен marketplace
страница https://deevki.ru/
Читать далее kraken ссылка krakenweb one
Источник ссылка на kraken торговая площадка
Перейти на сайт kraken зеркало тор ссылка kraken2web com
Нужен пластический хирург? санкт петербург пластическая хирургия клиники цены современные операции и эстетические процедуры. Опытные хирурги, безопасные методики и индивидуальный подход. Консультации, диагностика и качественный результат.
Ayr?ca, eger gri en cok tutulan koltuk rengi konusuyla ilgileniyorsan?z, buray? inceleyin. Kendiniz gorun: https://fikirdronu.com/articles/gri-koltuk-rengi-neden-tercih-edilir/
“sade s?k makyaj” konusu icin burada harika bilgiler var. Suradan okuyabilirsiniz: https://hobiprojesi.com/articles/sade-makyaj-yapimi-dogalligin-incelikleri/
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
Хочу выделить материал про История и эволюция плетения уникальных корзин.
Ссылка ниже:
https://fixora.ru/%d0%b8%d1%81%d1%82%d0%be%d1%80%d0%b8%d1%8f-%d1%81%d0%be%d0%b7%d0%b4%d0%b0%d0%bd%d0%b8%d1%8f-%d1%83%d0%bd%d0%b8%d0%ba%d0%b0%d0%bb%d1%8c%d0%bd%d1%8b%d1%85-%d0%ba%d0%be%d1%80%d0%b7%d0%b8%d0%bd/
Надеемся, эти советы помогут вам в создании великолепных корзин из лозы.
Нужна мебель? мебель из массива продажа эксклюзивные изделия из натурального дерева. Индивидуальный дизайн, качественные материалы и точное изготовление. Решения для дома и бизнеса.
Игра которая может принести тебе успех: играть в playfortuna
подробнее http://maps.google.as/url?q=https://travelanswer.ru/questions/mozhno-li-ispolyzovaty-prosrochennuyu-vaktsinu-sputnik-layt-dlya-vaezda-v-indoneziyu-na-bali.html
Тем, кто хочет глубже понять, как сочетаются технические аспекты SEO и маркетинговые стратегии, будет полезна эта публикация: https://o-ili-v.ru/stati/prodvizhenie-sajtov-iskusstvo-i-nauka-uspeha-v-cifrovom-mire/
пояснения http://www.google.as/url?q=https://letundra.com/ru/news/?taglist=keniya,uganda
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Хочу выделить материал про Фигурная резьба по дереву: от новичка до мастера.
Смотрите сами:
https://fixora.ru/%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80-%d0%ba%d0%bb%d0%b0%d1%81%d1%81-%d0%bf%d0%be-%d1%84%d0%b8%d0%b3%d1%83%d1%80%d0%bd%d0%be%d0%b9-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d0%b5-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80/
Удачи вам в плетении и вдохновения от наших мастеров!
Bally Casino offers a smaller game library compared to other top-rated online casinos in the UK. The game catalogue includes 700 titles from well-known game studios, including Big Time Gaming, Hacksaw Gaming, NetEnt, Evolution Gaming, and Pragmatic Play. Tiki Island, Catch a Movie, Secrets of the Genie, and Secrets of the Phoenix Megaways are just a few of the unique titles available on the site. So, if you’re a fan of classic slots with limited features, consider giving Fire Joker a spin! If you yearn for more entertaining fruits slots that still offer reasonable rewards like the Super Hot Joker slot machine, you’ll be happy to know that you have plenty of options. You can start with Playson’s 40 Joker Staxx: 40 Lines slot and the Lucky Joker 40 slot game from Amatic.
https://qatartradeway.click/4crowns-casino-online-review-for-players-in-the-united-kingdom/
➡️ New Slot Sites List Updated: October 2025 When it comes to the rules and gameplay of the Lucky Penny slot, simplicity is key. This slot features a 6×5 reel layout with a unique pay-anywhere system. This means that you don’t need to worry about traditional paylines – symbols can land anywhere on the reels, and as long as you have enough of the same symbol, you’ll win. From my experience in the industry, this kind of mechanic adds an extra layer of excitement, as every spin holds the potential for big wins. Any information provided is subject to our Privacy Policy It’s amazing to see how well Lucky Penny has resonated with players — what do you think has been the key to its enduring popularity? Set across a 6×5 grid, Lucky Penny rewards players whenever at least eight identical symbols land anywhere on the reels. The cascading reels mechanic enhances the gameplay by creating opportunities for multiple wins from a single spin as winning symbols are replaced by new ones.
Laravel обеспечивает быструю и безопасную разработку благодаря модульной архитектуре, защите от уязвимостей и удобному ORM. Фреймворк легко масштабируется, поддерживает очереди, кеширование и REST API. В связке с React создаёт современные SPA. Чистый код и экосистема ускоряют релиз и упрощают поддержку https://domenanet.xyz/
Бюджетные кухни часто требуют доработок уже в первые месяцы использования https://medyn.su/blog-pro-kuhni/kukhnya-iz-byudzhetnykh-materialov-kak-vybrat/
зайти на сайт http://maps.google.com/url?q=https://kazan.protos.ru/catalog/item/pugovicza-4-prokola-zoloto-23mm-69920
How long have you been in this field? You seem to know a lot more than I do, I’d love to know your sources!
перейти на сайт http://www.google.com.bh/url?sa=t&rct=j&q=&esrc=s&source=web&cd=5&ved=0CDoQFjAE&url=https://travelanswer.ru/questions/kak-podtverdity-rossiyskiy-nomer-telefona-v-prilozhenii-zhd-indii-podrobnoe-rukovodstvo.html
Нужна премиум мебель? продажа элитная мебель изготовление на заказ. Натуральные материалы, эксклюзивный дизайн и долговечность. Решения для дома и бизнеса с высоким уровнем качества.
Узнать больше https://maps.google.ne/url?q=https://letundra.com/es/news/?taglist=berlin-2,moldavia
нажмите, чтобы подробнее https://www.google.co.th/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&ved=0CDYQFjAB&url=https://travelanswer.ru/questions/gde-v-nyachange-priobresti-bileti-na-slipbas-do-dananga-dlya-osmotra-mosta.html
It sounds like you’re creating problems yourself by defining this as such a comprehensive, almost unknowable problem. Isn’t that self-defeating?
I just sent this post to a bunch of my friends as I agree with most of what you’re saying here and the way you’ve presented it is awesome.
страница http://www.google.com.ly/url?q=https://letundra.com/en/news/?taglist=air-seychelles,military-conflict
посмотреть на этом сайте http://images.google.si/url?q=https://letundra.com/es/news/?taglist=puerto-sudan,turquia
WoW decent article. Can I hire you to guest write for my blog? If so send me an email!
Подробнее https://www.google.no/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&uact=8&ved=0ahUKEwjSnsOIncvRAhUESJoKHcFlAcoQjhwIBQ&url=https://travelanswer.ru/questions/gde-v-stambule-vigodnee-vsego-obmenyaty-nalichnie-rubli-na-liri-v-tekushtey-situatsii.html
Thank you for your sharing. I am worried that I lack creative ideas. It is your article that makes me full of hope. Thank you. But, I have a question, can you help me?
подробнее https://maps.google.com/url?q=https://blkrip.vip/portfolio
Рффективные методы привлечения органического трафика Рё повышения видимости сайта описаны здесь: https://volkhp.ru/stati/prodvizhenie-sajtov-iskusstvo-i-nauka-uspeha-v-cifrovom-mire/
перенаправляется сюда https://www.google.am/url?sa=t&rct=j&q=smartest+online+neznakomka+neznakom&source=web&cd=1&ved=0cccqfjaa&url=https://letundra.com/ru/news/?taglist=aeroport-korrientes-cnq
“duvar boyama” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Iste link: https://hobiprojesi.com/articles/duvar-boyama-teknikleri/
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
По теме “Как выбрать лучшие кисти для акварели?”, нашел много полезного.
Вот, можете почитать:
https://fixora.ru/%d0%ba%d0%b8%d1%81%d1%82%d0%b8-%d0%b4%d0%bb%d1%8f-%d0%b0%d0%ba%d0%b2%d0%b0%d1%80%d0%b5%d0%bb%d0%b8/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
посетить веб-сайт http://maps.google.ge/url?q=https://letundra.com/ru/news/?taglist=scat,usharal
другие https://maps.google.sc/url?q=https://letundra.com/es/news/?taglist=aeropuerto-internacional-de-langkawi,malasia
Ребята, кто любит конкретику — в статье есть шикарные расчёты ROI для ниши «юридические услуги». Автор показывает: до накрутки 500 посетителей и 15 заявок, после накрутки (бюджет 20 000 ?) — 1500 посетителей и 45 заявок. ROI = 1400%. Каждый рубль принёс 14 рублей прибыли. Также есть прогноз, что будет с теми, кто не начнёт крутить: потеря позиций, вымывание из топа, уход клиентов к конкурентам. Очень наглядно: https://yagla.ru/blog/drugoe-o-marketinge/nakrutka-povedencheskih-faktorov-v-2026–2604u119831/
I want to see your book when it comes out.
каталог kraken официальные зеркала k2tor online
можно проверить ЗДЕСЬ kraken официальный сайт krakendarknet top
узнать больше кракен сайт ссылка kraken 11
посмотреть в этом разделе krakеn зеркало тор
Смотреть здесь kraken darknet market ссылка тор v5tor cfd
Смотреть здесь кракен зеркало
https://1win-uzb7.xyz/
здесь кракен ссылка kraken kraken2web com
такой даркнет официальный сайт kraken
У меня кондиционеры, сезон короткий. Классическое SEO не успевает — пока сайт раскачается, лето заканчивается. В статье прямо написано про сезонный бизнес: накрутка запускается за 1–2 месяца до сезона, за 2–4 недели выводит в топ-10, и к пику продаж сайт уже собирает трафик. Автор даже даёт примеры бюджетов. Очень вовремя наткнулся, спасибо: https://yagla.ru/blog/drugoe-o-marketinge/nakrutka-povedencheskih-faktorov-v-2026–2604u119831/
I’ve been exploring https://terpenewarehouse.com/products/forbidden-fruit-terpenes recently, and I’m remarkably enjoying the experience. The scents are in the chips, customary, and pleasant. They annex a discriminative touch to my day after day drill, dollop beat up a compare the atmosphere and atmosphere. A massive find to save anyone who appreciates savoury wellness tools.
https://lebull.com.mx/
Conforme a el contenido referido, Lebull es un sitio de juegos de azar digital y centro de betting en deportes que se desempena en la Republica Mexicana presentando un repertorio de mas de 10,000 propuestas ludicas, una app movil completa y proveedores de primer nivel entre los que destacan Pragmatic Play, NetEnt y NolimitCity.
https://betway-bet.com.mx/
Betway Mexico es un casino en linea y sitio de apuestas en deportes con casi 20 anos de trayectoria global, avalado por habilitaciones de organismos exigentes como la MGA junto con la Comision de Juego del Reino Unido, y actua cumpliendo con la regulacion de la Secretaria de Gobernacion en el pais.
подробнее кракен площадка
I’ve been exploring https://terpenewarehouse.com/products/xj-13-terpenes recently, and I’m remarkably enjoying the experience. The scents are well off, natural, and pleasant. They add a discriminative be a match for to my always habit, dollop set the willing and atmosphere. A great catch sight of quest of anyone who appreciates savoury wellness tools.
Для загрузки последних новинок фильмов воспользуйтесь надежным рутор зеркало форум.
Таким образом, Рутор продолжает пользоваться популярностью как удобная платформа для скачивания.
зайти на сайт krakеn зеркала
мебель из массива продажа https://mebel-dub-zakaz.ru
Great blog here! Also your site loads up very fast! What web host are you using? Can I get your affiliate link to your host? I wish my website loaded up as fast as yours lol
Hey! awesome blog! I happen to be a daily visitor to your site (somewhat more like addict 😛 ) of this website. Just wanted to say I appreciate your blogs and am looking forward for more!
Clear, concise and easy to access.
This is really interesting, You’re a very skilled blogger. I have joined your feed and look forward to seeking more of your fantastic post. Also, I have shared your website in my social networks!
Для загрузки последних новинок фильмов воспользуйтесь надежным рутор топ.
Поэтому рекомендуется использовать антивирус и проверять скачанные материалы.
When are you going to post again? You really entertain me!
узнать заказать отзывы на маркетплейсах
веб-сайт авито отзывы с гарантией
в этом разделе накрутка отзывов вайлдберриз тг
Перейти на сайт авито отзывы
подробнее накрутка рейтинга авито
этот сайт авито отзывы за деньги
здесь дешёвые отзывы озон
другие дешёвые отзывы озон
пояснения дешёвые отзывы вб
Для загрузки последних новинок фильмов воспользуйтесь надежным https rutor info top.
Для безопасности следует применять антивирусные программы и тщательно проверять загруженное.
посмотреть в этом разделе увеличение отзывов на вб
посетить сайт накрутка отзывов на озон
перейти на сайт авито отзывы с гарантией
смотреть здесь авито отзывы с гарантией
Хороший гайд для тех, кто хочет разобраться в продвижении сайтов в 2026 году. Автор делает акцент на том, что SEO остаётся основой устойчивого присутствия в интернете, несмотря на развитие платных каналов. Разбирает ключевые направления: анализ ключевых слов, контент-оптимизацию, техническое SEO, внешние сигналы и пользовательский опыт. Есть блок про типичные ошибки и интеграцию SEO с другими инструментами интернет-маркетинга. Полезно: https://drivetvchannel.ru/stati/prodvizhenie-sajtov-v-2026-godu-polnyj-gajd-po-seo-i-internet-marketingu/
сайт авито отзывы с гарантией
найти это сайт накрутки авито
здесь купить положительные отзывы на авито
посмотреть на этом сайте поднятия карточки вайлбериз
Certainly. And I have faced it. Let’s discuss this question. Here or in PM.
I had fun reading this post. I want to see more on this subject.. Gives Thanks for writing this nice article.. Anyway, I’m going to subscribe to your rss and I wish you write great articles again soon.
Источник накрутка отзывов озон
Для загрузки последних новинок фильмов воспользуйтесь надежным http rutor info search.
Интерфейс сайта достаточно прост и понятен, даже для новичков.
La plataforma Dragonia Casino Espana presenta una solida seleccion de entretenimiento para jugadores en Espana. Descubre dragoniacasinoespana.online Casino Dragonia Espana y acceder a un servicio de calidad con seguridad.
Посмотреть на сайте: https://listai.pro
Коллеги, хороший обзорный материал по SEO и интернет-маркетингу в 2026 году. Автор разбирает тренды: приоритет естественного языка и длинных запросов, рост значимости голосового поиска, учёт поведенческих факторов. Есть пошаговый план выстраивания стратегии и список метрик для отслеживания (CAC, ROI, время на сайте). Полезно для систематизации: https://vlcjq.ru/prodvizhenie-sajtov-seo-i-internet-marketing-v-2026-godu/
Analiza el catalogo disponible en https://dragoniacasinospain.online/ si quieres una alternativa completa con navegacion sencilla con una experiencia estable, moderna y orientada al usuario.
For anyone who needs a reliable alternative, 10Bet actually delivers on basic functionality without all the bloatware that most sites try to push on you, just make sure ur clear on there terms before you sign up bc that will save you headaches later.
Для загрузки последних новинок фильмов воспользуйтесь надежным https rutor info зеркало.
Интерфейс сайта достаточно прост и понятен, даже для новичков.
сюда продвижение вб
Wedding Venues In GT Karnal Road. Wedding Venues GT Karnal Road Book Farmhouses, Banquet Halls, Hotels for Party places at GT Karnal Road Ever thought of enjoying a multi-theme Wedding Function while being at just one destination? If not then you must not have visited Farmhouses.
узнать больше авито отзывы с гарантией
продолжить накрутка отзывов на карточки маркетплейсов
Your blog has become my go-to source for positive and uplifting content Thank you for consistently delivering high-quality posts
Your blog is always a highlight of my day
перенаправляется сюда отзывы с гарантией на озон
Смотреть здесь вывод в топ озон
подробнее здесь сайт накрутки авито
Для загрузки последних новинок фильмов воспользуйтесь надежным rutor перевод на русский.
Сайт славится обширной коллекцией фильмов, телепередач, музыки и приложений.
Узнать больше вывод в топ озон
посетить веб-сайт отзывы за деньги на объявление авито
Для загрузки последних новинок фильмов воспользуйтесь надежным рутор инфо официальный сайт.
Он предоставляет широкий выбор фильмов, сериалов, музыки и программного обеспечения.
Explorez la proposition de casino alawin france si vous recherchez une plateforme fiable pour les joueurs en France avec des promotions en cours et une interface claire.
has anyone here tried dream catcher online spielen yet? i keep seeing it mentioned but im not sure if its actually any good or if ppl are just hyping it up lol would reccomend hearing from someone whos actualy played it for a while ive heard mixed things so far
посетить веб-сайт накрутка авито рейтинга
https://pihtahvoya.ru/
узнать больше накрутка авито рейтинга
古装战争,铁骑纵横沙场,热血男儿保家卫国。长月烬明·月照千峰高清在线观看
Для загрузки последних новинок фильмов воспользуйтесь надежным darknet rutor.
Все это способствует популярности Рутора среди поклонников цифрового контента.
The content has no filler or repetitive phrases. Every sentence adds new understanding or value. bestjilislotgame Tight, clean writing feels respectful and professional.
проверить сайт http://maps.google.com.bh/url?q=https://letundra.com/es/news/?taglist=beijing-capital-airlines
зайти на сайт http://www.google.com.ec/url?q=https://travelanswer.ru/questions/pochemu-voditeli-bitaksi-ne-berut-zakazi-v-konyyalti.html
в этом разделе https://www.google.fm/url?q=https://letundra.com/en/news/?taglist=aeromexico-2,miami
هذا يجعل اللاعبين يثقون في استخدام الموقع دون قلق.
تحميل ٨٨٨ ستارز https://888starz-egypt-casino.com/apk/
перенаправляется сюда http://maps.google.co.ke/url?q=https://ufa.protos.ru/catalog/item/tesma-shtornaya-prozrachnyi-100mm-06-10000
Металлочерепица с профилем 49 мм в тёмно-зелёном RAL 6005. Объёмный рельеф под натуральную керамику. Оригинально смотрится на фоне деревьев и леса. металлочерепица цена Красноярск
узнать http://maps.google.com.kw/url?q=https://travelanswer.ru/questions/v-kakoe-vremya-sutok-razreshen-peshiy-perehod-granitsi-kibartay-chernishevskoe.html
веб-сайте http://www.google.be/url?q=https://perm.protos.ru/catalog/item/knopka-na-tesme-chernyi-120sht-1472
Подробнее https://images.google.pn/url?q=https://letundra.com/en/news/?taglist=lot-polish-airlines,paris-orly-airport-ory
Подробнее здесь https://images.google.com.au/url?q=https://letundra.com/ru/news/v-uzbekistane-projdut-snegopady/
интернет https://www.google.com.na/url?sa=t&rct=j&q=&esrc=s&source=web&cd=11&ved=0ahUKEwin16O_he3KAhVDPBoKHXUcA8IQFghFMAo&url=https://travelanswer.ru/questions/podskazhite-pozhaluysta-skolyko-stoit-5-ti-letnyaya-turisticheskaya-viza-v-indiyu.html
найти это https://www.google.gp/url?sa=t&rct=j&q=&esrc=s&source=web&cd=10&ved=0CEkQFjAJ&url=https://rostov-na-donu.protos.ru/catalog/item/xolniten-sumochnyi-zoloto-11mm-4709
здесь https://www.google.ru/url?q=https://letundra.com/en/news/?taglist=rostov-on-don,sukhumi
веб-сайте https://www.google.com.na/url?q=https://letundra.com/es/news/?taglist=aeropuerto-de-montreal-yul,nueva-orleans
ссылка на сайт https://images.google.jo/url?q=https://travelanswer.ru/questions/gde-v-minske-mozhno-vkusno-i-nedorogo-poobedaty-proverennie-mesta-s-demokratichnimi-tsenami.html
можно проверить ЗДЕСЬ https://www.google.com.pk/url?sa=t&rct=j&q=&esrc=s&source=web&cd=14&ved=0CGAQFjAN&url=https://travelanswer.ru/questions/gde-organizovaty-prazdnovanie-dnya-rozhdeniya-v-batumi-na-20-25-chelovek-s-vkusnoy-kuhney.html
веб-сайте https://www.google.bg/url?q=https://travelanswer.ru/questions/prakticheskiy-opit-samostoyatelyniy-perelet-nesovershennoletnego-rebenka-na-kipr-iz-rossii.html
такой https://images.google.ge/url?q=https://letundra.com/en/news/?taglist=brisbane,usa
перейти на сайт http://images.google.nu/url?q=https://letundra.com/en/news/?taglist=brest-2,menorca
такой http://images.google.co.nz/url?q=https://rostov-na-donu.protos.ru/catalog/item/knopka-alfa-omega-rozovyi-15mm-53871
опубликовано здесь http://images.google.so/url?q=https://letundra.com/ru/news/?taglist=bariloche,braziliya
Главная https://maps.google.co.ug/url?q=https://letundra.com/en/news/?taglist=avianca,olympic-games-2024
сюда http://www.google.tl/url?q=https://letundra.com/es/news/?taglist=erevan-2
здесь http://maps.google.com.mt/url?q=https://letundra.com/es/news/?taglist=burkina-faso-2,egipto
кликните сюда http://images.google.hr/url?q=https://nn.protos.ru/catalog/item/regulyator-dlya-belya-rozovyi-14mm-65-0114-1906
взгляните на сайте здесь http://www.google-health.com/__media__/js/netsoltrademark.php?d=https://travelanswer.ru/questions/gde-v-rayone-bang-tao-tailand-nayti-polnotsennie-apteki-s-lekarstvami-a-ne-tolyko-kosmetikoy.html
узнать больше http://maps.google.hn/url?q=https://travelanswer.ru/flights/from-novokuznetsk-to-delhi.html
Подробнее https://maps.google.bs/url?q=https://travelanswer.ru/questions/sposobi-oplati-proezda-na-skorostnom-tramvae-v-stambule-mozhno-li-ispolyzovaty-liri-bez-transportnoy-karti.html
Следующая страница http://images.google.mn/url?q=https://letundra.com/ru/news/?taglist=skope,tunis
Your posts are always so relatable and relevant to my life It’s like you know exactly what I need to hear at the right time
Your posts are like a breath of fresh air I appreciate how you tackle difficult topics with grace and empathy
нажмите http://www.google.com.pg/url?q=https://travelanswer.ru/questions/gde-nayti-nadezniy-i-dostupniy-prokat-avtomobiley-v-fethie.html
кликните сюда https://www.google.ad/url?sa=t&source=web&cd=1&sqi=2&ved=0cbwqfjaa&url=https://travelanswer.ru/questions/pochemu-u-etisalat-i-vodafon-net-apple-id-a-u-drugih-operatorov-esty-nuzhno-hotya-bi-5-mbit.html
смотреть здесь http://www.google.com.eg/url?q=https://barnaul.protos.ru/catalog/item/lenta-stropa-chernyi-50mm-92-4065001
Источник http://maps.google.ms/url?q=https://helpinginer.ru/
Если вы ищете надежное онлайн-казино, обязательно посетите 888starz bet официальный сайт — лучший выбор для игры и ставок.
Таким образом, игроки могут наслаждаться развлечениями вне зависимости от местоположения.
узнать больше http://maps.google.ro/url?q=https://letundra.com/ru/news/?taglist=ssha,temekula
узнать больше http://www.google.com.om/url?q=https://letundra.com/es/news/?taglist=cataclismos,grindavik-2
Подробнее https://maps.google.com.lb/url?q=https://letundra.com/es/news/?taglist=baltimore,san-jose-2
Смотреть здесь http://maps.google.ge/url?q=https://travelanswer.ru/questions/kak-popolnity-scet-mobilynogo-telefona-v-mekke-osobennosti-i-soveti.html
продолжить http://images.google.no/url?q=https://fabrica-tumana.ru/novosibirsk/catalog/uvlazhniteli/uvlazhniteli-dlya-produktovyh-vitrin/
содержание http://images.google.bj/url?q=https://letundra.com/en/news/?taglist=argentina-2,la-rioja
страница https://maps.google.gy/url?q=https://travelanswer.ru/questions/kak-rabotaet-prodlenie-vizi-v-tailande-pri-smene-adresa-prozhivaniya-nuzhen-li-noviy-tm30.html
ссылка на сайт https://images.google.am/url?q=https://letundra.com/es/news/?taglist=ciudad-ho-chi-minh,tan-sonnyat-aeropuerto-sgn
продолжить http://www.google.com.sl/url?q=https://travelanswer.ru/questions/gde-ostavity-mashinu-vozle-kaleichi-v-antalye-na-besplatnoy-parkovke-proverennie-lokatsii.html
Читать далее https://maps.google.iq/url?q=https://travelanswer.ru/flights/from-chicago-to-los-angeles.html
каталог https://images.google.com.sl/url?q=https://letundra.com/en/news/?taglist=egypt,serbia
в этом разделе http://www.google.pn/url?q=https://letundra.com/en/news/?taglist=flights-cancelled,myanmar-airways
Подробнее http://www.google.com.ni/url?q=https://letundra.com/es/news/?taglist=yamagata-2
узнать https://image.google.as/url?q=https://fabrica-tumana.ru/ryazan/catalog/kamery-sozrevaniya/klimaticheskie-kamery-teplo-holod/
Discover the amazing features of hghjfjdossa and elevate your experience today.
Prospects for hghjfjdossa suggest a bright and dynamic future.
посетить сайт https://www.google.com.kh/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0CBwQFjAA&url=https://letundra.com/es/news/?taglist=aeropuerto-internacional-niza-costa-azul
Следующая страница https://www.google.com.sb/url?q=https://deltabez.ru/stati/neudacha-pri-popytke-iskusstvennogo-vnedreniya-ekspeditorov-277/
продолжить https://www.google.com.om/url?sa=t&source=video&cd=8&ved=0CEkQtwIwBw&url=https://letundra.com/es/news/?taglist=capadocia,eventos
такой http://maps.google.co.uk/url?q=https://travelanswer.ru/questions/gde-nahoditsya-ekologicheskiy-zapovednik-variakakos-i-stoit-li-ego-posetity.html
ссылка на сайт https://www.google.co.ve/url?sa=t&rct=j&q=celulitis+nunca+mas&esrc=s&source=web&cd=1&cad=rja&ved=0ahUKEwjWzLuwi6bPAhWB9x4KHZ2OBHUQFggcMAA&url=https://letundra.com/en/news/?taglist=entebbe-2,tanzania
проверить сайт https://images.google.dz/url?q=https://letundra.com/es/news/?taglist=taiwan-taipei-chino,uni-air
проверить сайт https://images.google.cm/url?q=https://letundra.com/es/news/en-el-aeropuerto-de-alicante-espana-se-estan-realizando-obras-de-mantenimiento-en-la-pista-de-aterrizaje-hasta-el-29-de-marzo/
этот сайт https://images.google.gy/url?q=https://letundra.com/en/news/?taglist=fuerteventura-2,gran-canaria
нажмите здесь https://maps.google.ee/url?q=https://letundra.com/es/news/?taglist=huelga,iberia
интернет https://images.google.com.eg/url?q=https://letundra.com/ru/news/?taglist=astana,wizz-air-abu-dhabi
Review plicpad.com if you are interested in a resource focused on gambling notes with a modern layout and well-arranged information and an approach suited to users who prefer simple navigation when you want a site with a practical and modern structure with a broad notes-style setup, easy-to-scan pages, straightforward browsing, solid presentation, modern structure, consistent access and clear organization.
I’ve thought about posting something about this before. Good job! Can I use part of your post in my blog?
ссылка на сайт https://www.google.com.bo/url?sa=t&rct=j&q=tips+para+el+amor+y+la+buena+salud&esrc=s&source=web&cd=1&cad=rja&ved=0ahUKEwiZwqzNg_7LAhVPy2MKHU7ZBHgQFggaMAA&url=https://letundra.com/en/news/?taglist=burabay,kazakhstan
взгляните на сайте здесь http://toolbarqueries.google.com/url?q=https://travelanswer.ru/questions/problemi-pri-viezde-iz-tadzhikistana-bez-migratsionnoy-karti-pri-nalichii-registratsii.html
опубликовано здесь https://maps.google.com.co/url?q=https://www.vtt.ru/catalog/zapchasti-d-remonta-techniki/bloki-proyavki/Kyocera-Mita-DV-1140-DV-170-MAG/
We’re developing a conference, and it looks like you would be a great speaker.
ссылка на сайт https://www.google.rw/url?q=https://travelanswer.ru/questions/kak-zaregistrirovatysya-na-gov-il-bez-izrailyskogo-nomera-telefona.html
читать https://www.google.la/url?id=wyogwituxwqc&pg=pa222&q=https://travelanswer.ru/questions/mozhno-li-ispolyzovaty-rossiyskiy-sertifikat-avtoshkoli-dlya-polucheniya-voditelyskih-prav-v-kirgizstane.html
подробнее http://images.google.gp/url?q=https://letundra.com/ru/news/?taglist=manchester-2,salerno
читать http://www.google.kz/url?sa=t&rct=j&q=&esrc=s&source=web&cd=14&ved=0CD0QFjADOAo&url=https://letundra.com/ru/news/?taglist=bangalor,phuket
Thanks For This Blog, was added to my bookmarks.
содержание http://maps.google.com.cu/url?q=https://letundra.com/en/news/?taglist=boston-2,managua-2
I dont think I’ve read anything like this before. So good to find somebody with some original thoughts on this subject. cheers for starting this up. This blog is something that is needed on the web, someone with a little originality.
проверить сайт https://images.google.ae/url?q=https://letundra.com/es/news/?taglist=hanoi-2,vuelos-estacionales
сайт http://www.google.co.kr/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0cceqfjaa&url=https://deltabez.ru/stati/kak-ulichit-lozh-soiskatelya-ais-deltabezopasnost-37/
нажмите http://www.google.com.ly/url?q=https://yakutsk.protos.ru/catalog/item/rezinka-vyazanaya-belyi-25mm-61-22-11325
посетить веб-сайт http://maps.google.pt/url?q=https://hi-black.ru/catalog/tonery/toner_hi_black_toner_dlya_lexmark_ms310d_410d_510d_610dn_160_g_banka/
nicee content keep writing
читать http://www.google.co.ug/url?sa=t&rct=j&q=2+kings+4+1-7+pdf&source=web&cd=59&cad=rja&ved=0CFQQFjAIODI&url=https://feminism-russia.ru/
нажмите здесь http://www.google.vg/url?q=https://letundra.com/ru/news/?taglist=air-france,rejsy
этот контент https://maps.google.la/url?q=https://letundra.com/en/news/?taglist=ain-sokhna
нажмите здесь https://www.google.com.fj/url?q=https://travelanswer.ru/questions/mozhno-li-oformity-vizu-v-yuzhnuyu-koreyu-na-dva-zagranpasporta-odnovremenno.html
найти это https://maps.google.cl/url?q=https://letundra.com/ru/news/?taglist=oman,tegeran
посмотреть на этом сайте https://image.google.ws/url?q=https://letundra.com/en/news/?taglist=appleby-in-westmorland,united-kingdom
Коллеги, статья про актуальные методы и стратегии для роста трафика в 2026 году. Автор объясняет, почему SEO остаётся важным (долгосрочный эффект, высокое доверие, экономия бюджета), разбирает ключевые направления современного SEO и инструменты для анализа. Есть блок про типичные ошибки и интеграцию SEO с контекстной рекламой, SMM и email-маркетингом. Полезно для выстраивания комплексной стратегии: https://volkhp.ru/stati/prodvizhenie-sajtov-v-2026-godu-aktualnye-metody-i-strategii-dlja-rosta-trafika/
ссылка на сайт https://maps.google.co.th/url?q=https://travelanswer.ru/questions/gde-v-tbilisi-kupity-zidkiy-yaicniy-belok-esty-li-v-prodaze-i-kakie-alyternativi.html
интернет http://maps.google.co.th/url?q=https://travelanswer.ru/places/shichifuku-no-yu.html
такой http://maps.google.ee/url?q=https://letundra.com/ru/news/?taglist=er-riyad,siriya
Is it okay to put a portion of this on my weblog if perhaps I post a reference point to this web page?
ссылка на сайт https://www.google.td/url?q=https://travelanswer.ru/questions/arenda-avto-v-marmarise-v-2024-godu-kto-uspel-i-kakie-tseni.html
страница https://images.google.com.ng/url?q=https://travelanswer.ru/questions/kak-popolnity-balans-v-taksi-maksim-v-batumi-karta-ili-nalichnie.html
такой https://www.google.com.np/url?q=https://travelanswer.ru/questions/kak-poluchity-razreshenie-na-povtorniy-vaezd-re-entry-permit-po-uchebnoy-vize-v-tailande.html
опубликовано здесь http://www.google.com.ec/url?sa=t&rct=j&q=derritela+de+amor&esrc=s&source=web&cd=1&cad=rja&ved=0ahUKEwiw-Iryg_7LAhVBQSYKHTAtAjIQFggaMAA&url=https://travelanswer.ru/questions/kak-podgotovitysya-k-ma-na-vtoruyu-stupeny-oms-bez-spiska-dokumentov.html
перенаправляется сюда http://www.google.lv/url?sa=f&rct=j&url=https://letundra.com/es/news/?taglist=aero-mongolia,tokio-2
веб-сайте https://www.google.com.vc/url?q=https://protos.ru/catalog/item/kolczo-metallicheskoe-zoloto-8mm-01-315408-zol
Смотреть здесь http://www.google.la/url?id=wyogwituxwqc&pg=pa222&q=https://letundra.com/en/news/?taglist=events,temoson-2
Facebook CBO оптимизация для масштабирования расходов 2026 раскрывает самый эффективный метод управления бюджетом для медиабайеров, стремящихся увеличить объём трафика без потери эффективности. В условиях постоянного ужесточения алгоритмов платформы выбор между CBO и ABO становится критическим фактором успеха кампаний. Материал содержит практический анализ того, как CBO автоматически распределяет бюджет между адсетами на основе реальной производительности, какие пороги стартовых расходов гарантируют качественное обучение модели, и какие метрики указывают на готовность кампании к масштабированию. Особенно полезна информация для агентств и крупных рекламодателей, работающих с несколькими вертикалями одновременно и нуждающихся в максимальной автоматизации процесса оптимизации. Применение этих стратегий позволяет достичь стабильного ROI даже при агрессивном увеличении дневных лимитов расходов.
Understanding TikTok creative strategy for high converting ads 2026 has become essential for advertisers looking to cut through platform noise and drive real results. The TikTok algorithm has evolved significantly, rewarding content that feels native and authentic rather than polished corporate messaging, which means traditional advertising approaches often underperform. The article breaks down which creative formats, hooks, and storytelling patterns actually drive conversions in the current environment, including the shift toward user-generated content aesthetics and the role of pattern interrupts in the first three seconds. Media buyers and e-commerce brands discover specific creative principles that separate winning campaigns from those that drain budgets without return. Implementing these insights helps teams optimize their creative production process and allocate resources more effectively across their TikTok ad portfolio.
Перейти на сайт https://www.google.co.il/url?sa=t&ct2=us/0_0_s_2_0_t&usg=AFQjCNGti2pM07PNzQk5Xnw1P4PnTzZYhQ&cid=1317336660&ei=18jESaCqJsyQsAaV9fuuAQ&url=https://letundra.com/en/news/?taglist=volgograd-2,volgograd-airport-vog
кликните сюда https://images.google.pn/url?q=https://travelanswer.ru/questions/kak-poluchity-korzinu-i-aeroportnie-viplati-pri-vremennom-viezde-iz-izrailya.html
Читать далее http://maps.google.ga/url?q=https://letundra.com/en/news/?taglist=flights,kurgan-2
на этом сайте http://www.google.com.bh/url?sa=t&rct=j&q=trimline+7600+treadmill+manual&source=web&cd=2&ved=0CCwQFjAB&url=https://spb.protos.ru/catalog/item/zazhim-metallicheskii-zoloto-68982
этот контент http://maps.google.pn/url?q=https://letundra.com/en/news/?taglist=istanbul,usa
проверить сайт https://www.google.cd/url?sa=t&rct=j&q=&esrc=s&source=web&cd=7&cad=rja&uact=8&ved=0CEIQFjAG&url=https://letundra.com/es/news/?taglist=papua-new-guinea,papua-nueva-guinea
такой https://images.google.hr/url?q=https://letundra.com/ru/news/?taglist=avialinii,germaniya
I love what you’ve created here, this is definitely one of my favorite sites to visit.
можно проверить ЗДЕСЬ https://maps.google.mg/url?q=https://letundra.com/es/news/?taglist=aeropuerto-internacional-las-americas,sky-high
узнать http://www.google.ad/url?q=https://letundra.com/en/news/?taglist=republic-of-the-congo,tense-situation
посмотреть на этом сайте http://www.google.ps/url?sa=t&source=web&cd=6&ved=0cdsqfjaf&url=https://soulcatering.ru/podolsk/
Продолжение http://maps.google.com.sl/url?q=https://letundra.com/es/news/?taglist=aeropuerto-de-estambul,kabul-2
читать https://images.google.ml/url?q=https://letundra.com/es/news/?taglist=sanaa
опубликовано здесь https://www.google.com.sv/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&uact=8&ved=0CAcQjRw&url=https://letundra.com/en/news/?taglist=astana-2,karaganda-2
кликните сюда http://www.google.com.sv/url?q=https://barnaul.protos.ru/catalog/item/puanson-dlya-pugoviczy-dzhinsovoi-17mm-83001-21
Перейти на сайт http://www.google.la/url?q=https://vk.com/menssport606
содержание https://www.google.cf/url?q=https://letundra.com/es/news/?taglist=letonia,mykonos
опубликовано здесь https://images.google.co.uz/url?q=https://letundra.com/ru/news/?taglist=florida,punta-kana
опубликовано здесь https://images.google.com.bd/url?q=https://travelanswer.ru/questions/ogranicheniya-ipak-bank-na-operatsii-s-dollarami-v-uzbekistane-pochemu-nelyzya-snimaty-i-popolnyaty-bolyshe-10000.html
взгляните на сайте здесь http://images.google.lt/url?q=https://travelanswer.ru/questions/propustyat-li-v-polyshu-s-rossiyskim-pasportom-i-ispanskoy-studencheskoy-rezidentsiey-pri-vilete-v-valensiyu.html
нажмите здесь https://www.google.al/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0cb0qfjaa&url=https://letundra.com/ru/news/?taglist=bio-bio,prirodnoe-bedstvie
перейдите на этот сайт https://maps.google.no/url?q=https://letundra.com/en/news/?taglist=delhi,newark
перейдите на этот сайт http://maps.google.mu/url?q=https://letundra.com/en/news/?taglist=doha-2,lyon
перейдите на этот сайт http://maps.google.sk/url?q=https://letundra.com/ru/news/?taglist=izrail,kolombo
нажмите здесь https://images.google.cd/url?q=https://travelanswer.ru/questions/legalizatsiya-braka-v-shveytsarii-kuda-obrashtatysya-dlya-priznaniya-inostrannogo-brachnogo-soyuza.html
содержание https://www.google.rs/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&ved=0camqjxxqfqotcnlbtmeljcycfuknlaodhmoa2g&url=https://travelanswer.ru/questions/gde-v-shardzhe-nayti-ribniy-rinok-s-gotovimi-moreproduktami-i-svezhey-riboy.html
посетить веб-сайт https://www.google.co.za/url?sa=t&ct=en_za/0-0&ei=ClzARpz1CZyyoQOx6eiyDw&url=https://letundra.com/es/news/?taglist=aeropuerto-de-orlando-mco,ee-uu
Металлочерепица с замком 60 мм — герметичность при ветре 25 м/с. Цветостойкость сохраняется 10 лет. Купил RR32 — насыщенный тёмно-красный, очень красиво. металлочерепица цена Красноярск
кликните сюда http://images.google.hr/url?q=https://travelanswer.ru/questions/kak-dobratysya-ot-adlera-do-granitsi-s-abhaziey-stoimosty-i-varianti-transporta.html
кликните сюда https://images.google.co.tz/url?q=https://letundra.com/ru/news/?taglist=mezhdunarodnyj-aeroport-dubaj,sng
здесь https://images.google.com/url?q=https://travelanswer.ru/questions/mozhno-li-oplachivaty-rossiyskimi-kartami-v-turtsii-aktualynaya-informatsiya-dlya-turistov.html
Подробнее здесь https://maps.google.mk/url?q=https://travelanswer.ru/questions/gde-nayti-parkovku-v-centre-yalti-soveti-dlya-turistov.html
взгляните на сайте здесь http://www.google.im/url?q=https://travelanswer.ru/flights/from-khujand-to-krasnojarsk.html
Подробнее https://www.google.com.sv/url?sa=i&rct=j&esrc=s&source=images&cad=rja&uact=8&ved=0CAcQjRw&url=https://letundra.com/en/news/?taglist=palm-springs,washington
опубликовано здесь http://www.google.com.sb/url?sa=t&rct=j&q=how+does+bone+repair+pdf&source=web&cd=3&ved=0cdgqfjac&url=https://letundra.com/es/news/?taglist=habana,taiwan-2
подробнее https://www.google.si/url?q=https://letundra.com/ru/news/?taglist=livan,otmena-rejsov
узнать https://images.google.mv/url?q=https://travelanswer.ru/questions/kak-otsledity-izmeneniya-v-raspisanii-aviareysov-perenos-ili-otmena-vileta.html
посмотреть в этом разделе http://www.google.sk/url?q=https://travelanswer.ru/flights/from-sarajevo-to-alexandria-egypt.html
подробнее здесь https://www.google.co.ke/url?q=https://travelanswer.ru/places/delsjons-kanotcentral.html
нажмите http://maps.google.je/url?q=https://letundra.com/en/news/?taglist=stockholm,tallinn
Discover the amazing features of hghjfjdossa and elevate your experience today.
Comprehending hghjfjdossa involves a combination of expertise and thoughtful analysis.
узнать https://images.google.cl/url?q=https://letundra.com/ru/news/?taglist=chernogoriya,rim
подробнее https://www.google.cd/url?q=https://fabrica-tumana.ru/chita/catalog/ventilyaciya-ventilyacionnoe-oborudovanie/ventilyatory/
посмотреть в этом разделе http://www.google.im/url?sa=t&rct=j&q=&esrc=s&source=web&cd=14&ved=0CDQQFjADOAo&url=https://ufa.protos.ru/catalog/category/kryuchki-obuvnye
нажмите здесь https://maps.google.mw/url?q=https://protos.ru/catalog/item/xolniten-dzhinsovyi-matovoe-zoloto-10mm-53403
подробнее https://images.google.it/url?q=https://travelanswer.ru/questions/marshrut-moskva-kishinev-cherez-erevan-s-belim-pasportom-md-osobennosti-i-vozmozhnosti.html
содержание http://www.google.ie/url?q=https://letundra.com/ru/countries/uruguay/
I don’t think the title of your article matches the content lol. Just kidding, mainly because I had some doubts after reading the article.
Te lo digo sin rollos — solo escribe rajajoy-mx.com y ya. Juego limpio y ademas juegos que pagan te esperan ahi. ?Por que no te has registrado? Picale a rajajoy-mx.com.
подробнее https://images.google.mk/url?q=https://letundra.com/ru/news/?taglist=kanada,park-gallaher
What made you first develop an interest in this topic?
нажмите http://images.google.je/url?q=https://letundra.com/es/news/?taglist=ancash-2
опубликовано здесь https://www.google.jo/url?sa=t&source=web&cd=29&ved=0CDsQFjAIOBQ&url=https://letundra.com/ru/news/?taglist=avialinii,monterrej
узнать больше http://www.google.com.br/url?q=https://travelanswer.ru/places/edinburg-kasl.html
Thank you for this great piece of content. Best Regards
содержание https://www.google.fr/url?q=https://kazan.protos.ru/catalog/item/ukrashenie-emblema-chernyi-nikel-13-5397-135
в этом разделе https://maps.google.as/url?q=https://spb.protos.ru/catalog/item/tesma-shtornaya-prozrachnyi-20mm-20067-dp
нажмите http://images.google.gl/url?q=https://letundra.com/ru/news/?taglist=easyjet,oslo
???? ???? ?????? ????? ??????? ?? ??????? ??????.
??? ???? ???? ????? ????? ??????? ??????? ???????.
?????? ???? ??????? ????? ????? ???????? ??????? ???? ???? ????????.
??????? ???? ????? 888starz ?????? ?????? ???? ????
888starzتحميل https://888starz-egypt-ar.com/apk/
Узнать больше https://images.google.tt/url?q=https://travelanswer.ru/flights/from-ivanovo-to-mineralnye-vody.html
зайти на сайт https://www.google.com.ua/url?q=https://street-shark.ru/shop/bryuki-basic-power-1139-06/
нажмите, чтобы подробнее https://www.google.com.bo/url?sa=t&rct=j&q=celulitis+nunca+mas&esrc=s&source=web&cd=1&cad=rja&ved=0ahUKEwiZwqzNg_7LAhVPy2MKHU7ZBHgQFggaMAA&url=https://travelanswer.ru/questions/kak-rossiyaninu-proverity-shtrafi-gibdd-v-kazahstane-aktualynie-sposobi-proverki.html
найти это https://images.google.mu/url?q=https://letundra.com/es/news/?taglist=china,isla-ishigaki
смотреть здесь http://images.google.fm/url?q=https://kazan.protos.ru/catalog/item/pugovicza-na-nozhke-latun-15mm-64232
кликните сюда http://maps.google.co.il/url?q=https://travelanswer.ru/questions/arenda-avto-v-gruzii-s-rossiyskimi-pravami-osobennosti-i-vozmozhnie-problemi.html
Продолжение https://maps.google.rw/url?q=https://letundra.com/ru/news/?taglist=irkutsk,talakan
проверить сайт http://maps.google.gr/url?q=https://protos.ru/catalog/item/lenta-remennaya-xakiekryu-30mm-07-117030-07
узнать http://maps.google.mn/url?q=https://travelanswer.ru/flights/from-baltimore-to-seattle.html
нажмите https://www.google.com.pk/url?q=https://travelanswer.ru/questions/problema-s-oplatoy-uzbekskoy-kartoy-v-app-store-kak-resity.html
подробнее http://www.google.lk/url?q=https://street-shark.ru/shop/kurtka-jordan-4/
Перейти на сайт http://images.google.lk/url?q=https://letundra.com/ru/news/?taglist=fort-loderdejl,peru
нажмите здесь http://www.google.ae/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&docid=QWioQUrjer7YdM&tbnid=SNVzZSDBuBGiYM:&ved=0CAUQjRw&url=https://vk.com/menssport388
ссылка на сайт https://maps.google.gg/url?q=https://letundra.com/en/news/?taglist=montreal,switzerland
Узнать больше http://www.google.co.ve/url?q=https://travelanswer.ru/questions/gde-vigodnee-pokupaty-krossovki-tiger-v-tokio-sravnenie-tsen-v-raznih-magazinah.html
пояснения http://images.google.lt/url?q=https://letundra.com/es/news/?taglist=bucarest,gran-bretana
посетить сайт https://images.google.rs/url?q=https://letundra.com/en/news/?taglist=finnair,tel-aviv-2
нажмите https://www.google.gr/url?q=https://letundra.com/es/news/?taglist=craiova,francia
узнать https://www.google.com.tw/url?sa=t&ct=tw/0-0&ei=NasCSLvGIYOC6wPrz4Uy&url=https://barnaul.protos.ru/catalog/item/karabin-metall-chernyi-nikel-2543mm-6828-1
смотреть здесь https://images.google.as/url?q=https://letundra.com/ru/news/?taglist=namangan,uzbekistan
проверить сайт http://www.google.co.kr/url?q=https://travelanswer.ru/flights/from-caracas-to-porlamar.html
можно проверить ЗДЕСЬ https://www.google.tk/url?q=https://letundra.com/en/news/?taglist=chennai-2,singapore
перенаправляется сюда https://maps.google.ms/url?q=https://letundra.com/en/news/?taglist=fly-lili,spain
нажмите http://maps.google.rs/url?q=https://blkrip.vip/
найти это http://images.google.co.za/url?q=https://yakutsk.protos.ru/catalog/item/pugovicza-na-nozhke-chernyi-glyanczevyi-178mm-13-1441-88black-28
здесь https://www.google.bf/url?sa=t&rct=j&q=root+megemon+delay+viagra&source=web&cd=1&ved=0cceqfjaa&url=https://letundra.com/es/news/?taglist=guernsey
можно проверить ЗДЕСЬ http://www.google.jo/url?q=https://fabrica-tumana.ru/saratov/catalog/kamery-sozrevaniya/vinnye-shkafy/
перейдите на этот сайт http://www.google.com.au/url?q=https://fabrica-tumana.ru/dolgoprudnyj/catalog/uvlazhniteli/na-20-40-m/
ссылка на сайт https://www.google.co.nz/url?sa=t&source=web&cd=6&ved=0CCUQFjAF&url=https://www.vtt.ru/catalog/zapchasti-d-remonta-techniki/kryshki/HP-B3Q10-40012/
нажмите, чтобы подробнее https://images.google.td/url?q=https://travelanswer.ru/questions/kak-dobratysya-ot-aeroporta-batu-do-tsentra-na-metro-ili-elektrichke-bez-problem-s-kartoy.html
нажмите, чтобы подробнее https://images.google.cz/url?q=https://travelanswer.ru/questions/klimatoterapiya-v-kislovodske-dlya-grudnichka-posle-pnevmonii-adaptatsiya-k-perepadu-visot.html
Источник https://www.google.jo/url?sa=t&source=web&cd=29&ved=0CDsQFjAIOBQ&url=https://fabrica-tumana.ru/petrozavodsk/catalog/uvlazhniteli/dlya-skladov/
интернет https://www.google.ru/url?q=https://letundra.com/en/news/?taglist=beni-mellal-2,ryanair
Подробнее http://www.google.co.il/url?q=https://travelanswer.ru/flights/from-aktobe-to-minsk.html
зайти на сайт https://maps.google.at/url?q=https://travelanswer.ru/questions/kakoy-gruzinskiy-bank-lucse-dlya-mulytivalyutnogo-sceta-pri-rabote-v-singapure.html
здесь http://maps.google.ge/url?q=https://letundra.com/es/news/?taglist=aeropuerto-de-ekaterimburgo-koltsovo-svx,nordstar
Главная https://www.google.no/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0ahUKEwj_kJT69uzRAhUHr48KHVizC_MQ_BcICTAA&url=https://letundra.com/ru/news/?taglist=bryussel,rim
этот контент https://www.google.dj/url?q=https://letundra.com/en/news/?taglist=blagoveshchensk,seasonal-flights
перенаправляется сюда https://www.google.com.ec/url?sa=t&rct=j&q=montes+mugica&esrc=s&source=web&cd=1&cad=rja&ved=0ahUKEwiw-Iryg_7LAhVBQSYKHTAtAjIQFggaMAA&url=https://letundra.com/ru/news/?taglist=kataniya,lot-polish-airlines
этот контент http://maps.google.at/url?q=https://letundra.com/es/news/?taglist=polonia,sopot
читать http://www.google.com.bz/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&ved=0CCsQFjAA&url=https://letundra.com/es/news/?taglist=aeropuerto-de-londres-heathrow,dubai
нажмите, чтобы подробнее http://maps.google.com.do/url?q=https://letundra.com/ru/news/?taglist=otmena-rejsov,tokumen-pty
кликните сюда https://maps.google.lt/url?q=https://letundra.com/en/news/?taglist=florida-2,key-west
Подробнее здесь https://www.google.co.in/url?sa=t&source=web&cd=1&ved=0cbkqfjaa&url=https://letundra.com/ru/news/?taglist=kostroma,rossiya
Продолжение https://www.google.bs/url?sa=t&rct=j&q=&esrc=s&source=web&cd=8&ved=0CEwQFjAH&url=https://letundra.com/en/news/?taglist=aeroitalia,barcelona
в этом разделе http://www.google.com.ua/url?q=https://letundra.com/es/news/?taglist=autobus,moscu
в этом разделе http://toolbarqueries.google.com/url?q=https://letundra.com/ru/news/?taglist=arakati
Продолжение https://www.google.ee/url?q=https://rostov-na-donu.protos.ru/catalog/category/knopki
нажмите здесь http://www.google.com.mt/url?q=https://letundra.com/en/news/?taglist=health-and-care,hungary
Смотреть здесь https://images.google.ca/url?source=imgres&ct=img&q=https://letundra.com/ru/news/?taglist=limassol,pejya
перейдите на этот сайт http://images.google.co.ao/url?q=https://chelyabinsk.protos.ru/catalog/item/shnur-rezinka-elastichnyi-belyi-3mm-79-30501
веб-сайт http://images.google.ca/url?q=https://letundra.com/en/news/?taglist=pittsburgh,united-kingdom
выберите ресурсы https://www.google.cz/url?q=https://blkrip.vip/zh/services/music-video-editing/
Главная http://maps.google.tg/url?q=https://street-shark.ru/shop/futbolka-nike-dv9832-010/
I don’t normally comment but I gotta say appreciate it for the post on this one : D.
интернет https://maps.google.com.hk/url?q=https://travelanswer.ru/questions/gde-nayti-na-malyte-detskoe-platye-zolushki-s-dostavkoy-bez-visokih-sborov.html
узнать https://www.google.at/url?q=https://kazan.protos.ru/catalog/item/fasteks-chernyi-20mm-6228
интернет http://www.google.com.sb/url?q=https://letundra.com/ru/news/?taglist=abu-dabi,bhubaneshvar
здесь https://images.google.com.lb/url?q=https://letundra.com/en/news/?taglist=belarus-2,hotels
Читать далее http://images.google.com.ar/url?q=https://letundra.com/en/news/?taglist=brasilia,lisbon
веб-сайте http://www.google.tl/url?q=https://travelanswer.ru/questions/gde-v-side-vigodno-obmenyaty-rubli-na-tureckie-liri-poisk-lucsih-obmennikov.html
I had highly recommend this blog to my good friend, it’s so good
Смотреть здесь https://www.google.bs/url?q=https://travelanswer.ru/places/grand-tour-airfield.html
узнать больше Здесь https://www.google.bs/url?q=https://letundra.com/ru/news/?taglist=bornmut,rejsy
нажмите здесь http://www.google.com.pk/url?q=https://letundra.com/ru/news/?taglist=kitaj,okay-airlines
найти это http://maps.google.com.sa/url?q=https://travelanswer.ru/questions/gde-kupity-originalynie-krossovki-adidas-nike-v-sanye-i-kakie-tseni.html
Узнать больше http://www.google.com.cu/url?q=https://travelanswer.ru/questions/gde-luchshe-kupity-romanticheskuyu-ekskursiyu-na-yahte-s-uzhinom-v-dubae-proverennie-mesta-i-soveti.html
взгляните на сайте здесь http://www.google.sc/url?q=https://volgograd.protos.ru/catalog/item/bulavka-odnostrezhnevaya-45mm1mm-96-b10
кликните сюда https://image.google.mw/url?q=https://letundra.com/ru/news/?taglist=aeroport-el-prat,tel-aviv
ссылка на сайт http://maps.google.ci/url?q=https://letundra.com/en/news/?taglist=public-transport,qatar
на этом сайте https://www.google.com.ly/url?sa=t&rct=j&q&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0CCgQtwIwAA&url=https://travelanswer.ru/questions/chto-braty-v-gori-dagestana-v-nachale-iyunya-soveti-po-ekipirovke-ot-opitnih-turistov.html
Продолжение https://maps.google.com.gh/url?q=https://travelanswer.ru/questions/kakoy-optimalyniy-marshrut-iz-milana-do-ozera-komo-transportnie-varianti-i-soveti.html
Подробнее http://www.google.cg/url?q=https://letundra.com/ru/news/?taglist=tway-air,zagreb
на этом сайте https://www.google.ht/url?q=https://ekaterinburg.protos.ru/catalog/item/shnur-rezinka-elastichnyi-chernyi-25mm-79-25580
интернет https://www.google.hu/url?q=https://letundra.com/es/news/?taglist=kaliningrado,pobeda-2
здесь https://www.google.cat/url?sa=i&source=images&cd=&docid=rdsnzw-lze-hmm&tbnid=64z2jkmn5y-yim:&ved=0cacqjb04sae&url=https://yourfate.store/collection/muzhskie-kurtki-iz-poliestera/
пояснения https://www.google.im/url?sa=t&rct=j&q=&esrc=s&source=web&cd=14&ved=0cdqqfjadoao&url=https://letundra.com/en/news/?taglist=flights,palanga-2
выберите ресурсы http://images.google.com.ly/url?q=https://letundra.com/ru/news/?taglist=madrid,velikobritaniya
перейдите на этот сайт https://www.google.com.af/url?q=https://travelanswer.ru/questions/podskazhite-pozhaluysta-nuzhno-li-oformlyaty-tranzitnuyu-vizu-esli-letety-iz-moskvi-v-kuala-lumpur-s-tranzitom-v-guanchzhou.html
перенаправляется сюда http://maps.google.com.cu/url?q=https://letundra.com/ru/news/?taglist=airasia,luangphabang
With this calculator, bettors can avoid math errors by relying on accurate, instant computations.
each way accumulator bet calculator https://singlebetcalculator.com/bet-calculator/accumulator/
взгляните на сайте здесь https://images.google.es/url?q=https://letundra.com/en/news/?taglist=waterland-water-park
пояснения https://maps.google.nr/url?q=https://travelanswer.ru/questions/gde-v-bishkeke-mozhno-nedorogo-kupity-bitovie-melochi-gladilki-sushilki-podushki-i-prochee.html
нажмите здесь https://www.google.ac/url?sa=t&rct=j&q=salehoo&source=web&cd=20&cad=rja&uact=8&ved=0cfyqfjajoao&url=https://travelanswer.ru/flights/from-kaluga-to-batumi.html
узнать больше Здесь http://images.google.tg/url?q=https://travelanswer.ru/questions/gde-vigodnee-vsego-obmenyaty-valyutu-v-aeroportu-manili-pri-nochnom-tranzite.html
посмотреть на этом сайте https://www.google.no/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0ahUKEwj_kJT69uzRAhUHr48KHVizC_MQ_BcICTAA&url=https://letundra.com/ru/news/?taglist=kasablanka,velikobritaniya
смотреть здесь http://www.google.com.do/url?q=https://letundra.com/en/news/?taglist=airbaltic,stavanger-2
пояснения http://www.google.com.uy/url?q=https://kazan.protos.ru/catalog/item/pryazhka-so-strazami-nikel-30mm-6381
ссылка на сайт https://images.google.ba/url?q=https://letundra.com/en/news/?taglist=manila-2,morocco
посетить веб-сайт http://www.google.fm/url?q=https://travelanswer.ru/flights/from-atyrau-to-aktobe.html
нажмите http://maps.google.com.np/url?q=https://travelanswer.ru/questions/oformlenie-vnzh-v-shvetsii-pri-nalichii-zhilyya-i-scheta-v-shvedskom-banke-vmesto-vizi.html
в этом разделе https://www.google.com.cy/url?sa=t&rct=j&q=&esrc=s&frm=1&source=web&cd=7&ved=0CFQQFjAG&url=https://samara.protos.ru/catalog/item/kist-shtornaya-bolshaya-chernyizoloto-8325sm-27-928030
узнать http://images.google.rw/url?q=https://protos.ru/catalog/item/lenta-kipernaya-seryi-30mm-07-1020-09
взгляните на сайте здесь https://maps.google.tl/url?q=https://fabrica-tumana.ru/kemerovo/catalog/uvlazhniteli/dlya-ovoshhehranilishh/
узнать больше Здесь https://www.google.jo/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0cbwqfjaaahukewjkjkxgqnvgahulvrqkhxx0alu&url=https://travelanswer.ru/questions/kak-popolnity-schiot-belorusskogo-operatora-svyazi-life-iz-rossii-v-2026-godu-esty-li-rabotayushtie-sposobi-s-rossiyskoy-kartoy.html
такой http://images.google.com.bz/url?q=https://travelanswer.ru/questions/esty-li-kameri-hraneniya-v-aeroportu-antalii-i-kak-imi-polyzovatysya.html
перейти на сайт https://www.google.co.ke/url?sa=t&source=web&cd=3&ved=0CCUQFjAC&url=https://travelanswer.ru/airlines/premier-airlines.html
узнать https://www.google.gg/url?q=https://ufa.protos.ru/catalog/item/pugovicza-na-nozhke-nikel-22mm-59460
сайт https://maps.google.hu/url?q=https://travelanswer.ru/questions/kak-vibraty-luchshuyu-shkolu-dlya-russkoyazichnogo-rebenka-v-azerbaydzhane.html
выберите ресурсы http://maps.google.com.bn/url?q=https://protos.ru/catalog/item/ramka-regulirovochnaya-chernyi-nikel-32mm-68413
перенаправляется сюда https://www.google.gy/url?q=https://travelanswer.ru/questions/gde-v-litve-priobresti-spetsialynie-bumazhnie-formi-dlya-vipechki-keksov-i-maffinov.html
Коллеги, статья про актуальные методы и стратегии для роста трафика в 2026 году. Автор объясняет, почему SEO остаётся важным (долгосрочный эффект, высокое доверие, экономия бюджета), разбирает ключевые направления современного SEO и инструменты для анализа. Есть блок про типичные ошибки и интеграцию SEO с контекстной рекламой, SMM и email-маркетингом. Полезно для выстраивания комплексной стратегии: https://volkhp.ru/stati/prodvizhenie-sajtov-v-2026-godu-aktualnye-metody-i-strategii-dlja-rosta-trafika/
найти это https://www.google.hu/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&uact=8&ved=0ahUKEwidt-m_rJjOAhWHPxoKHS9hCLsQjRwIBw&url=https://letundra.com/es/news/?taglist=cerkno,eventos
посетить веб-сайт https://maps.google.com.tr/url?q=https://letundra.com/ru/news/?taglist=belfast,praga
здесь https://maps.google.jo/url?q=https://travelanswer.ru/questions/mozhno-li-kupity-bilet-na-playtime-v-mongolii-na-odin-deny.html
посетить веб-сайт https://www.google.dj/url?q=https://travelanswer.ru/questions/kak-pravilyno-ukazaty-datu-vaezda-v-ankete-na-vizu-x1-v-kitay-nuzhen-li-tochniy-bilet-ili-mozhno-priblizitelyno.html
можно проверить ЗДЕСЬ http://images.google.com.ng/url?q=https://letundra.com/en/news/?taglist=ajet,medina-2
нажмите, чтобы подробнее https://maps.google.com.pr/url?q=https://travelanswer.ru/questions/rekomendatsii-po-viboru-komfortabelynogo-otelya-dlya-otdiha-s-roditelyami-v-rayone-la-dig-na-seyshelah.html
посетить сайт http://images.google.com.pe/url?q=https://letundra.com/ru/news/?taglist=buhara
узнать http://images.google.co.th/url?q=https://letundra.com/ru/news/?taglist=evlah
смотреть здесь http://maps.google.com.py/url?q=https://letundra.com/es/news/?taglist=codigo-compartido,samarcanda
Honestly this site is way cleaner than I expected for what it is 🙂 88bath
нажмите, чтобы подробнее http://www.google.co.id/url?q=https://travelanswer.ru/questions/kakoy-proezdnoy-bilet-vibraty-dlya-korotkoy-poezdki-v-venu-na-tri-dnya-soveti-i-sravnenie-tarifov.html
Следующая страница http://www.google.com.ai/url?q=https://travelanswer.ru/questions/krasivie-mesta-i-goroda-ryadom-s-cheshme-buhti-nochnie-bari-i-plyazhnie-vecherinki.html
этот контент http://images.google.ba/url?q=https://travelanswer.ru/questions/mezhdugorodnie-avtobusnie-perevozki-v-irane-uroveny-komforta-i-osobennosti-organizatsii.html
узнать больше https://www.google.lk/url?q=https://travelanswer.ru/questions/kuda-shodity-v-kaspiyske-vecherom-restorani-i-kafe-s-nochnoy-atmosferoy.html
Читать далее https://images.google.la/url?q=https://travelanswer.ru/questions/mozhno-li-proyti-kontroly-v-changi-zadolgo-do-vileta-hotim-pogulyaty-po-aeroportu-a-kamera-hraneniya-posle-tamozhni.html
опубликовано здесь https://www.google.ro/url?q=https://letundra.com/es/news/?taglist=aeropuerto-chaudhary-charan-singh-lko,lucknow
Продолжение https://maps.google.co.ck/url?q=https://travelanswer.ru/questions/obmen-valyuti-i-pokupka-sim-karti-v-aeroportu-pekina-chto-nuzhno-znaty.html
пояснения https://images.google.mk/url?q=https://travelanswer.ru/questions/priostanovka-viplat-iz-korzini-absorbtsii-pri-viezde-repatriantov-iz-strani-chto-nuzhno-znaty.html
посмотреть в этом разделе https://www.google.tt/url?q=https://letundra.com/ru/news/?taglist=denver,los-andzheles
найти это https://images.google.com.pa/url?q=https://letundra.com/ru/news/?taglist=dalat,thai-vietjet
опубликовано здесь http://www.google.co.bw/url?q=https://letundra.com/es/news/?taglist=ciudad-de-kuwait,flynas
Следующая страница http://www.google.cv/url?q=https://letundra.com/es/news/?taglist=aeropuerto-internacional-de-dubai,china
взгляните на сайте здесь https://maps.google.mw/url?q=https://travelanswer.ru/questions/mozno-li-provezti-kurt-cay-i-specii-v-bagaze-pri-polete-iz-samarkanda-v-novosibirsk.html
Коллеги, статья про актуальные методы и стратегии для роста трафика в 2026 году. Автор объясняет, почему SEO остаётся важным (долгосрочный эффект, высокое доверие, экономия бюджета), разбирает ключевые направления современного SEO и инструменты для анализа. Есть блок про типичные ошибки и интеграцию SEO с контекстной рекламой, SMM и email-маркетингом. Полезно для выстраивания комплексной стратегии: https://volkhp.ru/stati/prodvizhenie-sajtov-v-2026-godu-aktualnye-metody-i-strategii-dlja-rosta-trafika/
продолжить https://maps.google.gy/url?q=https://letundra.com/en/news/?taglist=air-horizont,flights
веб-сайт kraken onion ссылка
ссылка на сайт кракен ссылка
пояснения kraken сайт зеркала
Your positivity and enthusiasm are infectious It’s clear that you are truly passionate about what you do and it’s inspiring to see
опубликовано здесь kraken сайт
здесь кракен даркнет
подробнее kraken onion ссылка
здесь kraken darknet ссылка
нажмите здесь kraken onion
каталог kraken onion
посмотреть на этом сайте kraken зеркало
в этом разделе кракен онион
сюда kraken darknet
этот контент kraken onion ссылка
этот контент kraken onion ссылка
смотреть здесь кракен darknet
нажмите здесь kraken онион
этот сайт kraken onion ссылка
нажмите kraken onion
нажмите здесь кракен onion
узнать больше Здесь kraken сайт
здесь kraken onion ссылка
в этом разделе kraken onion ссылка
пояснения kraken darknet
нажмите здесь kraken onion ссылка
Honestly the interface is cleaner than most competitors out there. mobile drip games online 🙂
интернет кракен даркнет
другие kraken сайт
посмотреть в этом разделе kraken onion
I just sent this post to a bunch of my friends as I agree with most of what you’re saying here and the way you’ve presented it is awesome.
I don’t normally comment but I gotta say appreciate it for the post on this one : D.
нажмите, чтобы подробнее kraken onion
ссылка на сайт kraken onion
ссылка на сайт kraken зеркало
здесь kraken onion
Продолжение kraken onion ссылка
Se stai cercando una proposta interessante per utenti in Italia https://alfcasinowin.it con una struttura chiara e facile da navigare puo rappresentare un’opzione valida da esaminare se il tuo obiettivo e trovare una proposta piu completa per offrire una proposta pensata per utenti che apprezzano chiarezza, varieta, consultazione rapida, struttura ordinata, accessibilita, stabilita e comfort.
взгляните на сайте здесь kraken darknet ссылка
в этом разделе kraken сайт зеркала
такой кракен онион
Clear, concise and easy to access.
этот сайт kraken onion
перейдите на этот сайт kraken онион
Good job for bringing something important to the internet!
перейти на сайт кракен онион
такой kraken darknet
Dude.. I am not much into reading, but somehow I got to read lots of articles on your blog. Its amazing how interesting it is for me to visit you very often. –
Its wonderful as your other blog posts : D, regards for putting up.
интернет kraken onion ссылка
Saw your material, and hope you publish more soon.
нажмите, чтобы подробнее kraken darknet ссылка
подробнее kraken зеркало
проверить сайт кракен даркнет
зайти на сайт kraken сайт
Узнать больше kraken онион
mostbet kayıt – mostbet türkiye yasal mı, mostbet giriş yap
нажмите здесь kraken onion ссылка
mostbet – casä°no cashback – mostbet türkiye güncel giriş, mostbet promo code no deposit
здесь kraken онион
I love your blog. It looks every informative.
You ma’am have a way with words. Thank you very much!
mostbet casino kayıt – mostbet – casä°no cashback, mostbet türkiye oyun
mostbet app download for android – mostbet promo code, mostbet türkiye indir
download mostbet app – mostbet giriş yap, mostbet online app
mostbet türkiye girişi – mostbet türkiye güncel giriş, mostbet resmi web sitesi kayıt
mostbet app ios – mostbet türkiye, mostbet giriş yap
интернет кракен onion
mostbet cashback nasıl kullanılır – mostbet kayıt bonusu, mostbet türkiye girişi
code promo mostbet – mostbet app apk download, mostbet türkiye indir
mostbet türkiye yasal mı – mostbet casino promo code, mostbet casino kayıt
mostbet giriş türkiye – mostbet tr giriş, mostbet kayıt bonusu
Узнать больше кракен onion
продолжить
здесь
посмотреть на этом сайте
смотреть здесь
пояснения
узнать kraken onion
читать
этот контент
такой kraken darknet ссылка
опубликовано здесь
можно проверить ЗДЕСЬ
такой
здесь kraken onion ссылка
посетить сайт
see this website
square login
Источник
перенаправляется сюда
Продолжение
great post to read
square login
important source
square login
сайт
look at here now
sofi login
this post
sofi login
see here now
sofi login
узнать больше
перейдите на этот сайт
read the full info here
sofi login
в этом разделе
Related Site
square login
подробнее здесь
find out
square login
Следующая страница
why not try these out
square login
view website
wealthsimple login
get more
sofi login
her comment is here
square login
read here square login
I love how your posts are both informative and entertaining You have a talent for making even the most mundane topics interesting
try these out
sofi login
helpful hints
wealthsimple login
сюда
go to this website
square login
have a peek at this website square login
get more
wealthsimple login
click here for more
sofi login
click over here
buy youtube views
discover this
wealthsimple login
Home Page
wealthsimple login
Full Article
square login
I like your quality that you put into your writing . Please do continue with more like this.
Good day! This is my first comment here so I just wanted to give a quick shout out and say I really enjoy reading through your articles. Can you recommend any other blogs/websites/forums that cover the same subjects? Thanks a lot!
this post
wealthsimple login
Im impressed. I dont think Ive met anyone who knows as much about this subject as you do. Youre truly well informed and very intelligent. You wrote something that people could understand and made the subject intriguing for everyone. Really, great blog youve got here.
зайти на сайт
Continued
wealthsimple login
выберите ресурсы
click for more
square login
index
wealthsimple login
взгляните на сайте здесь
ссылки на кракен.
Сервис Kraken – лучший магазин моментальных покупок Даркнета
Торговая площадка Kraken – лучший магазин Даркнета, где есть почти любые позволяющие расслабиться препараты, фальшивые документы и деньги, можно заплатить за взлом сайтов и пробив информации. Клиентам обеспечивается полная анонимность, а число продавцов постоянно увеличивается.
Товары и услуги на сайте Kraken
В магазинах сервиса встречаются такие товары и услуги:
• Большой ассортимент наркотиков – от марихуаны и стимуляторов до ЛСД и кокаина.
• Обналичивание Bitcoin.
• Платные подписки VPN-сервисов.
• Цифровые услуги.
• Паспорта, удостоверения, водительские права.
• Банковские карты и симки.
• Фальшивые купюры – обычно – от 1000 до 5000 рублей.
• Оборудование и приборы – от скрытых камер и жучков до флешек для взлома.
На сайте можно и найти работу. Например, устроиться курьером или кладменом, варщиком или тем, кто выращивает каннабис. Можно самому продавать препараты и другие товары.
Преимущества сайта
Основные преимущества этого ресурса:
• Полная анонимность для продавцов и покупателей за счёт расположения в «луковой сети».
• Применение криптовалют в качестве денежной единицы. Это гарантирует дополнительную безопасность.
• Возможность забрать товар не дожидаясь доставки. Клады уже доставлены – нужно только забирать.
• Гарантия отсутствия обмана. Проблемы можно решить обратившись в техподдержку, доступную 24 часа в сутки.
• Рейтинговая система, которая позволяет легко определить надёжных продавцов.
• Доставка в разные города РФ и соседних странах. Список доступных мест включает даже небольшие населённые пункты.
Клиентам сервиса доступны бесплатные службы. В любое время можно получить консультацию у юриста или нарколога. А при появлении проблем – обратиться в техподдержку, которая тоже отвечает круглосуточно.
Дополнительный плюс площадки – наличие своего форума. Вход из расположенной вверху панели сайта. На форуме есть правила поведения, новости и информация от других посетителей. А ещё исследования администрации проекта и школа кладменов для обмена опытом закладчиков.
A colleague in the field told me to check out your website.
he has a good point
wealthsimple login
helpful hints square login
веб-сайте
узнать больше Здесь
ссылка на сайт
I had fun reading this post. I want to see more on this subject.. Gives Thanks for writing this nice article.. Anyway, I’m going to subscribe to your rss and I wish you write great articles again soon.
проверить сайт
Главная
перейти на сайт
перейдите на этот сайт
подписчики max 30 дней
review
square login
посмотреть в этом разделе
find more information
square login
you could look here
square login
go to website
wealthsimple login
image source
square login
If you want to browse a notes-style resource in the gambling niche https://plicpad.com with a practical setup for exploring notes and related sections can help you review the available content more efficiently if you want to compare different gambling-related resources thanks to its categorized pages, readable sections, clear navigation, practical access, steady browsing, organized material and user-friendly setup.
page
wealthsimple login
Website
wealthsimple login
try this web-site
wealthsimple login
веб-сайт
Thanks so much for this, keep up the good work 🙂
Читать далее
click this
square login
посетить веб-сайт
you can look here
wealthsimple login
official site square login
this article
wealthsimple login
pop over here
square login
даркнет зайти.
Сайт Кракен – лучшая торговая площадка в Darknet
Торговая площадка Кракен – лучший магазин в Даркнете, где продаются разные позволяющие расслабиться препараты, фальшивые документы и деньги, предлагается доступ к чужим личным данным и аккаунтам. Клиентам гарантирована максимальная конфиденциальность, а число продавцов всё время растёт.
Что можно купить и заказать на сайте Kraken
На Кракене можно найти такие товары и услуги:
• Несколько видов наркотиков – от марихуаны и стимуляторов до опиатов и психоделиков.
• Обналичивание криптовалют.
• Взломанные аккаунты VPN.
• Цифровые услуги.
• Разные виды документов.
• Банковские и SIM карты.
• Фальшивые купюры – в основном, 1000, 2000 и 5000 руб..
• Оборудование и приборы – от скрытых камер и жучков до флешек для взлома.
Сервис предлагает и заработать. В том числе, стать курьером или кладменом, химиком или гровером. Есть возможность стать продавцом.
Несколько плюсов площадки
Причины для выбора покупок на Кракене:
• Высокий уровень конфиденциальности всех участников сделки благодаря расположению в Даркнете.
• Использование BTC для совершения сделок. Оплата Биткойнами обеспечивает дополнительную безопасность.
• Возможность забрать товар сразу после оплаты. Клады уже на месте – зная адрес, можно забрать.
• Гарантия отсутствия мошенничества. Конфликтные ситуации можно решить обращением в техподдержку, доступную 24 часа в сутки.
• Рейтинговая система, которая позволяет сразу отсортировать лучшие магазины.
• Обслуживание России и СНГ. Список доступных мест содержит сотни наименований.
Клиентам сервиса доступны бесплатные дополнительные услуги. В любое время они могут проконсультироваться с врачом-наркологом или юристом. А если появились проблемы – обратиться в техподдержку, работающей круглосуточно.
Дополнительный плюс сервиса – наличие своего форума. Вход по ссылке в расположенной вверху панели сайта. На страницах форума находятся основные правила, новости и информация от других посетителей. И даже исследования администрации проекта и раздел для обмена опытом доставщиков товара.
Подробнее
official statement
wealthsimple login
browse around these guys
sofi login
additional reading
square login
I’m impressed, I need to say. Really rarely do I encounter a blog that’s both educational and entertaining, and let me tell you, you have hit the nail on the head.
see here
wealthsimple login
check over here Ledger Live Download
these details Ledger Download
check Ledger Live App
click to investigate Ledger Live
hop over to this web-site Ledger Live App
look at this web-site Ledger Live App
see here now Ledger Live App
hop over to these guys Ledger Live
this content Ledger Download
address Ledger Live Download
my sources Ledger Download
my website Ledger Live Download
Bonuses Ledger App
next Ledger Live desktop
view website Ledger Live App
like this Ledger Live desktop
have a peek at these guys Ledger Live Download
try this Ledger Live Download
Visit This Link Ledger Live desktop
click to read more Ledger Live App
Continue Reading Ledger Live desktop
visit their website Ledger Download
you could try this out Ledger Live Download
go to the website Ledger App
why not find out more Ledger App
her latest blog Ledger Download
why not look here Ledger Live Download
dig this Ledger Download
что такое сайт кракен.
Сервис Kraken – лучшая торговая площадка Даркнета
Торговая площадка Кракен – одно из крупнейших сообществ Даркнета, где продаются разные позволяющие расслабиться препараты, поддельные банкноты, паспорта и удостоверения, предлагается взлом сайтов и пробив информации. Покупателям обеспечивается полная анонимность, а число продавцов всё время растёт.
Товары и услуги на Кракене
На Кракене встречаются такие товары и услуги:
• Большой ассортимент наркотиков – от марихуаны и стимуляторов до ЛСД и кокаина.
• Обналичивание криптовалют.
• Платные подписки VPN.
• Услуги хакеров.
• Разные виды документов.
• Банковские карты и симки.
• Фальшивые деньги – обычно – от 1000 до 5000 рублей.
• Приборы и устрйоства – камеры, жучки, электронные ключи.
Сервис предлагает и найти работу. Например, устроиться курьером или кладменом, химиком или гровером. Есть возможность открыть свой магазин.
Несколько плюсов сервиса
Причины для выбора этого ресурса:
• Высокий уровень конфиденциальности для продавцов и покупателей за счёт расположения в Даркнете.
• Применение криптовалют для совершения сделок. Оплата Биткойнами обеспечивает анонимность всех транзакций.
• Возможность забрать товар не дожидаясь доставки. Клады уже на месте – нужно только забирать.
• Гарантия отсутствия обмана. Проблемы можно решить обратившись в техподдержку, которая работает круглосуточно.
• Система рейтинга, которая позволяет легко определить лучшие магазины.
• Обслуживание России и СНГ. Перечень городов включает сотни наименований.
Пользователям Кракена можно бесплатно использовать службы. В любое время они могут получить консультацию у юриста или нарколога. А при появлении проблем – обратиться в техподдержку, которая тоже отвечает в любое время.
Ещё одна особенность Кракена – собственный форум. Перейти к нему можно по ссылке в верхней части сервиса. На форуме есть основные правила, новости и информация от других посетителей. А ещё результаты администрации проекта и раздел для обмена опытом доставщиков товара.
linked here Ledger Live App
go Ledger Live
you can find out more Ledger Live App
find this Ledger Live
over here Ledger Live App
check my source Ledger Live desktop
click here to read Ledger App
read this post here Ledger Live desktop
have a peek at this web-site Ledger Download
my website Ledger Live App
get more Ledger Live
find Ledger Download
visit the site Ledger Download
Continue Ledger Live Download
company website Ledger Live App
site here Ledger Live Download
link Ledger App
site Ledger Live
visit homepage Ledger Download
check these guys out Ledger Live
directory Ledger Live App
look at this now Ledger Live Download
web Ledger App
more tips here Ledger Live desktop
Home Page Ledger Live App
website here Ledger Live App
my company Ledger Live desktop
check Ledger Live Download
click this site Ledger App
this post Ledger Download
click to find out more Ledger Live desktop
click for more info Ledger Live
top article Ledger Download
ссылка на кракен.
Сайт Kraken – лучшая торговая площадка в Darknet
Торговая площадка Kraken – одно из крупнейших сообществ Даркнета, где есть почти любые позволяющие расслабиться препараты, поддельные банкноты, паспорта и удостоверения, можно заплатить за взлом сайтов и пробив информации. Клиентам гарантирована максимальная конфиденциальность, а число продавцов постоянно увеличивается.
Товары и услуги на Кракене
На Кракене можно найти такие товары и услуги:
• Несколько видов наркотиков – от марихуаны и стимуляторов до ЛСД и кокаина.
• Обналичивание криптовалют.
• Платные подписки VPN.
• Цифровые услуги.
• Паспорта, удостоверения, водительские права.
• Телефонные и банковские карты.
• Фальшивые купюры – в основном, 1000, 2000 и 5000 руб..
• Оборудование и приборы – камеры, жучки, электронные ключи.
На сайте можно и заработать. Например, устроиться курьером или кладменом, химиком или гровером. Есть возможность стать продавцом.
Преимущества сервиса
Основные преимущества этого ресурса:
• Полная анонимность клиентов и владельцев магазинов благодаря расположению в «луковой сети».
• Использование BTC для совершения сделок. Оплата Биткойнами обеспечивает анонимность всех транзакций.
• Возможность забрать товар сразу после оплаты. Клады уже доставлены – зная адрес, можно забрать.
• Гарантия отсутствия стать жертвой мошенников. Конфликтные ситуации решаются обратившись в поддержку сайта, которая работает круглосуточно.
• Рейтинговая система, позволяющая снизить быстро найти надёжных продавцов.
• Обслуживание России и СНГ. Список доступных мест содержит даже небольшие населённые пункты.
Пользователям Кракена доступны бесплатные службы. В любое время можно проконсультироваться с врачом-наркологом или юристом. А при появлении проблем – обратиться в техподдержку, которая тоже отвечает в любое время.
Дополнительный плюс сервиса – собственный форум. Перейти к нему можно по ссылке в верхней части сайта. На страницах форума находятся правила поведения, объявления и новости. А ещё исследования площадки и школа кладменов для общения закладчиков.
Read Full Report Ledger App
weblink Ledger Live App
i was reading this Ledger Live Download
why not look here Ledger Live App
look at this site Ledger Live desktop
a knockout post Ledger Live
see page Ledger Live
see it here Ledger Download
this Ledger Live
Clicking Here Ledger App
go to my site Ledger Live App
ссылка кракена.
Сервис Kraken – лучшая торговая площадка в Darknet
Сервис Kraken – лучший магазин в Даркнете, где продаются разные ПАВ, фальшивые документы и деньги, можно заплатить за доступ к чужим личным данным и аккаунтам. Покупателям обеспечивается полная анонимность, а количество магазинов всё время растёт.
Что можно купить и заказать на Кракене
В магазинах сервиса можно найти такие предложения:
• Несколько видов наркотических средств – от травки и мета до опиатов и психоделиков.
• Обналичивание Bitcoin.
• Платные подписки VPN.
• Цифровые услуги.
• Разные виды документов.
• Телефонные и банковские карты.
• Фальшивые купюры – обычно – от 1000 до 5000 рублей.
• Оборудование и приборы – камеры, жучки, электронные ключи.
Кракен поможет и заработать. В том числе, стать закладчиком, химиком или гровером. Можно самому продавать препараты и другие товары.
Несколько плюсов сайта
Причины для выбора площадки Kraken:
• Полная анонимность клиентов и владельцев магазинов благодаря расположению в Даркнете.
• Применение криптовалют для совершения сделок. Оплата Биткойнами обеспечивает анонимность всех транзакций.
• Возможность забрать товар сразу после оплаты. Закладки уже на месте – нужно только забирать.
• Минимальный риск обмана. Конфликтные ситуации можно решить обратившись в техподдержку, доступную 24 часа в сутки.
• Рейтинговая система, которая позволяет сразу отсортировать лучшие магазины.
• Доставка в разные города РФ и соседних странах. Перечень городов содержит сотни наименований.
Клиентам сервиса можно бесплатно использовать дополнительные услуги. В любое время можно проконсультироваться с врачом-наркологом или юристом. А при появлении проблем – обратиться в техподдержку, которая тоже отвечает круглосуточно.
Дополнительный плюс сервиса – собственный форум. Вход по ссылке в верхней части сайта. На форуме есть основные правила, объявления и новости. А ещё исследования администрации проекта и школа кладменов для общения доставщиков товара.
кликните сюда https://tripscan-tutu.ru
подробнее tripscan
интернет https://tripscan-tutu.ru
сюда сайт трипскан
можно проверить ЗДЕСЬ https://tripscan-tutu.ru
Перейти на сайт https://tripscan-tutu.ru
Главная tripscan
Источник трип скан
перейти на сайт https://tripscan-tutu.ru/
веб-сайт https://tripscan-tutu.ru
узнать больше Здесь трип скан
узнать больше https://tripscan-tutu.ru/
dude check this out MostBet is actually pretty solid, way cleaner than most other stuff ive used and the whole thing just works without being annoying. honestly if ur looking for something thats just gonna do what its supposed to do this is it
Следующая страница трип скан
зайти на сайт https://tripscan-tutu.ru/
Гарантия 12 месяцев на каркас и сварные швы — это серьёзно. За год нашли небольшой дефект в сварном шве. Устранили за свой счёт в течение 3 рабочих дней без вопросов. бытовка строительная Москва
ссылка на сайт https://tripscan-tutu.ru
здесь сайт трипскан
другие сайт трипскан
сайт https://tripscan-tutu.ru/
Your posts are always so well-written and thought out It’s evident that you put a lot of effort into each and every one
Your photography and visuals are always so stunning They really add to the overall quality of the content
здесь трип скан
другие tripscan
https://pinnacle-bet.com.mx/
El operador Pinnacle esta lejos de ser un casino al uso que te cautiva con promociones gigantescas repletos de requisitos inalcanzables; su oferta de valor gira en torno a margenes reducidos, probabilidades muy competitivas y una dinamica sin ocultismos sin trampas.
перенаправляется сюда tripscan
TOTO138 LOGIN
Следующая страница трипскан вход
выберите ресурсы сайт трипскан
нажмите https://tripscan-tutu.ru/
It’s fascinating to look back at this 2009 perspective on MEM and web mashups. We’ve come so far in how we integrate real-world sensors with web architecture. Today, this kind of ‘Web of Things’ logic is exactly what powers high-end commercial security systems. The ability to mash up live video feeds, access control data, and real-time alerts into a single dashboard is the direct evolution of the concepts discussed here. Great walk down memory lane for IoT enthusiasts!”https://dahlcore.com/commercial-security
ссылка на сайт tripscan
смотреть здесь трипскан
подробнее tripscan
кракен магазин сайт.
Сайт Kraken – лучшая торговая площадка Даркнета
Сервис Кракен – одно из крупнейших сообществ в Даркнете, где продаются разные ПАВ, поддельные банкноты, паспорта и удостоверения, предлагается взлом сайтов и пробив информации. Покупателям обеспечивается полная анонимность, а число продавцов всё время растёт.
Что можно купить и заказать на сайте Kraken
В магазинах сервиса можно найти такие предложения:
• Несколько видов наркотических средств – от травки и мета до ЛСД и кокаина.
• Обналичка криптовалют.
• Взломанные аккаунты VPN.
• Услуги хакеров.
• Разные виды документов.
• Банковские карты и симки.
• Поддельные банкноты – в основном, 1000, 2000 и 5000 руб..
• Оборудование и приборы – от скрытых камер и жучков до флешек для взлома.
На сайте можно и найти работу. Например, устроиться закладчиком, варщиком или тем, кто выращивает каннабис. Есть возможность самому продавать препараты и другие товары.
кракен тг маркетплейс.
Сайт Кракен – лучшая торговая площадка Даркнета
Торговая площадка Кракен – лучший магазин Даркнета, где продаются разные психоактивные вещества, поддельные банкноты, паспорта и удостоверения, можно заплатить за взлом сайтов и пробив информации. Покупателям обеспечивается полная анонимность, а количество магазинов всё время растёт.
Товары и услуги на Кракене
На Кракене можно найти такие товары и услуги:
• Большой ассортимент наркотических средств – от травки и мета до ЛСД и кокаина.
• Обналичивание криптовалют.
• Платные подписки VPN.
• Услуги хакеров.
• Паспорта, удостоверения, водительские права.
• Банковские карты и симки.
• Поддельные банкноты – в основном, 1000, 2000 и 5000 руб..
• Оборудование и приборы – от скрытых камер и жучков до флешек для взлома.
Кракен поможет и найти работу. Например, устроиться закладчиком, варщиком или тем, кто выращивает каннабис. Можно начать свой бизнес.
зайти на сайт https://tripscan-tutu.ru
выберите ресурсы трипскан вход
веб-сайт https://tripscan-tutu.ru/
найти это tripscan
Источник vodkabet
выберите ресурсы vodka. bet официальный сайт
узнать больше vodkabet прямо сейчас
посмотреть в этом разделе водкабет играть сейчас
Следующая страница казино водка бет vodkabet
содержание vodkabet
сайт водкабет казино
Следующая страница водкабет играть сейчас
посмотреть на этом сайте сайт трипскан
можно проверить ЗДЕСЬ vodkabet новый сайт
узнать больше vodkabet новый сайт
зайти на сайт трип скан
узнать больше vodka. bet официальный сайт
подробнее здесь водкабет играть сейчас
можно проверить ЗДЕСЬ водкабет казино
посетить веб-сайт казино водка бет vodkabet
содержание водкабет казино
нажмите здесь водкабет играть сейчас
Подробнее vodkabet водкабет казино
ссылка на сайт vodkabet прямо сейчас
веб-сайте водкабет казино
нажмите здесь vodkabet новый сайт
такой vodka bet casino
узнать трипскан
Главная сайт трипскан
I’m partial to blogs and i actually respect your content. The article has actually peaks my interest. I am going to bookmark your site and preserve checking for new information.
смотреть здесь https://tripscan-tutu.ru/
узнать больше Здесь https://tripscan-tutu.ru
Wow, amazing blog layout! How long have you been blogging for? you make blogging look easy. The overall look of your site is wonderful, let alone the content!
Oh my goodness! an amazing article. Great work.
Its wonderful as your other blog posts : D, regards for putting up.
нажмите https://tripscan-tutu.ru
подробнее https://tripscan-tutu.ru/
소액결제현금화는 휴대폰의 월 소액결제 한도(최대 100만~200만원)를 이용해 상품권이나 디지털 콘텐츠를 구매한 뒤, 이를 전문 업체에 수수료를 떼고 팔아 현금으로 바꾸는 행위입니다.
Hi there! I just wanted to ask if you ever have any trouble with hackers? My last blog (wordpress) was hacked and I ended up losing several weeks of hard work due to no back up. Do you have any solutions to protect against hackers?
пояснения казино водка бет vodkabet
этот сайт водкабет играть сейчас
этот сайт водка бет
продолжить водкабет играть сейчас
подробнее здесь водка бет
I absolutely adore your site! You aggressive me as able-bodied as all the others actuality and your broiled PS is absolutely great!
опубликовано здесь казино водка бет vodkabet
посетить сайт vodkabet водкабет казино
содержание vodkabet
опубликовано здесь казино водка бет vodkabet
Источник vodka bet casino
узнать больше Здесь vodkabet прямо сейчас
подробнее водкабет играть сейчас
Подробнее здесь vodkabet новый сайт
Good day! This is my first comment here so I just wanted to give a quick shout out and say I really enjoy reading through your articles. Can you recommend any other blogs/websites/forums that cover the same subjects? Thanks a lot!
найти это водкабет играть сейчас
Следующая страница водкабет казино
узнать больше трипскан
Продолжение https://tripscan-tutu.ru/
нажмите здесь vodka bet casino
подробнее здесь vodkabet новый сайт
подробнее vodkabet прямо сейчас
проверить сайт vodkabet новый сайт
Узнать больше vodkabet прямо сейчас
пояснения водкабет играть сейчас
Перейти на сайт vodka bet casino
I have been surfing online more than three hours today, yet I never found anything that grabbed my interest as much as this piece.
найти это vodka. bet официальный сайт
нажмите, чтобы подробнее водкабет играть сейчас
на этом сайте казино водка бет vodkabet
Узнать больше vodkabet прямо сейчас
нажмите здесь vodka. bet официальный сайт
Подробнее водкабет играть сейчас
проверить сайт водкабет казино
веб-сайте водкабет казино
кликните сюда vodkabet водкабет казино
нажмите здесь водка бет
сюда vodkabet
узнать vodkabet прямо сейчас
Следующая страница [url=https://vodka-bet.kz]vodkabet[/url]
Продолжение vodkabet прямо сейчас
перейти на сайт vodka bet casino
посетить веб-сайт vodkabet прямо сейчас
Подробнее водкабет казино
подробнее водка бет
можно проверить ЗДЕСЬ vodkabet новый сайт
в этом разделе водкабет играть сейчас
посмотреть в этом разделе vodkabet новый сайт
сюда vodka. bet официальный сайт
узнать vodkabet новый сайт
нажмите vodkabet новый сайт
Узнать больше водкабет казино
перенаправляется сюда водкабет играть сейчас
посмотреть в этом разделе vodkabet
здесь vodkabet
посмотреть в этом разделе vodka. bet официальный сайт
перенаправляется сюда водкабет играть сейчас
Thanks for your patience and sorry for the inconvenience!
нажмите здесь казино водка бет vodkabet
веб-сайт vodkabet
I just added this to my favorites. I truly love reading your posts. Tyvm!
другие водкабет казино
узнать больше Здесь водка бет
взгляните на сайте здесь vodkabet прямо сейчас
найти это vodkabet водкабет казино
Подробнее здесь водка бет
So my freind told me about this site ec oline 88 fault like three months ago right and I was skeptical at first but then I actually checked it out and wow its actually legit like the whole interface is clean and everything works the way its supposed to. Never had any major problems, loads quick, and honestly im impressed with how smoothly everything runs compared to other places I’ve tried, ngl pretty good discovery.
посмотреть на этом сайте водкабет казино
пояснения водкабет играть сейчас
выберите ресурсы водкабет играть сейчас
Следующая страница казино водка бет vodkabet
Бытовка за 2 рабочих дня — выручила когда прежний подрядчик подвёл по срокам. Позвонил в пятницу, в среду уже стояла на площадке. Чёткая работа без лишних обещаний. пост охраны блок контейнер
Подробнее vodkabet водкабет казино
нажмите, чтобы подробнее водка бет
нажмите здесь водкабет играть сейчас
kraken дарк нет.
Сайт Кракен – лучший магазин моментальных покупок Даркнета
Сервис Kraken Onion – одно из крупнейших сообществ в Даркнете, где продаются разные позволяющие расслабиться препараты, фальшивые документы и деньги, можно заплатить за взлом сайтов и пробив информации. Посетителям обеспечивается полная анонимность, а количество магазинов постоянно увеличивается.
Покупки на Кракене
В магазинах сервиса можно найти такие предложения:
• Большой ассортимент наркотических средств – от марихуаны и стимуляторов до ЛСД и кокаина.
• Обналичка Биткоинов.
• Взломанные аккаунты ВПН.
• Услуги хакеров.
• Разные виды документов.
• Телефонные и банковские карты.
• Фальшивые купюры – обычно – от 1000 до 5000 рублей.
• Оборудование и приборы – от скрытых камер и жучков до флешек для взлома.
Сервис предлагает и найти работу. Например, устроиться закладчиком, химиком или гровером. Можно начать свой бизнес.
такой водкабет играть сейчас
на этом сайте водкабет играть сейчас
узнать больше водкабет казино
каталог vodka. bet официальный сайт
Главная vodkabet водкабет казино
подробнее здесь vodkabet водкабет казино
взгляните на сайте здесь vodka. bet официальный сайт
другие водкабет казино
найти это vodkabet новый сайт
посетить веб-сайт vodkabet водкабет казино
можно проверить ЗДЕСЬ vodka. bet официальный сайт
можно проверить ЗДЕСЬ водкабет играть сейчас
подробнее vodkabet прямо сейчас
перейти на сайт водкабет играть сейчас
выберите ресурсы водкабет играть сейчас
подробнее здесь водка бет
содержание казино водка бет vodkabet
узнать больше Здесь vodkabet прямо сейчас
читать водка бет
посмотреть в этом разделе водкабет играть сейчас
веб-сайте водкабет играть сейчас
содержание vodkabet новый сайт
взгляните на сайте здесь vodkabet новый сайт
узнать больше водка бет
перейти на сайт vodkabet прямо сейчас
веб-сайте водка бет
каталог водкабет играть сейчас
посмотреть в этом разделе vodka bet casino
веб-сайт vodkabet прямо сейчас
подробнее казино водка бет vodkabet
Главная водка бет
смотреть здесь водкабет играть сейчас
здесь vodka bet casino
здесь vodka bet casino
посмотреть в этом разделе vodkabet
можно проверить ЗДЕСЬ vodkabet новый сайт
подробнее водка бет
интернет водка бет
узнать больше Здесь водкабет играть сейчас
зайти на сайт водкабет играть сейчас
на этом сайте водкабет казино
посетить сайт vodkabet водкабет казино
страница vodka. bet официальный сайт
I was reading through some of your content on this internet site and I believe this web site is very informative ! Continue posting .
Подробнее мега ссылка
опубликовано здесь vodkabet новый сайт
ссылка на сайт водка бет
веб-сайт vodkabet новый сайт
Кстати, если вас интересует Как записаться к врачу онлайн: советы и права, посмотрите сюда.
Вот, можете почитать:
https://eradvd.ru/%d0%b1%d0%b5%d0%b7-%d1%80%d1%83%d0%b1%d1%80%d0%b8%d0%ba%d0%b8/kak-zapisatsya-k-vrachu-onlajn-bez-ocheredi-i-zashhitit-prava-paczienta/
https://вип-свет.рф/
Hello there! I really enjoy reading your blog! If you keep making amazing posts like this I will come back every day to keep reading.
I appreciate how this blog promotes self-growth and personal development It’s important to continuously strive to become the best version of ourselves
other petra aptos wallet extension
Хочу выделить материал про Социально-экономическое развитие Пензенской области.
Ссылка ниже:
https://ripnull.ru/%d0%b1%d0%b5%d0%b7-%d1%80%d1%83%d0%b1%d1%80%d0%b8%d0%ba%d0%b8/soczialno-ekonomicheskoe-razvitie-penzenskoj-oblasti-kak-menyayutsya-rajony-i-investiczii/
This will be helpful for my family.
Коллеги, хороший материал о долгосрочном характере SEO в 2026 году. Автор разбирает, как изменились алгоритмы поисковых систем (акцент на контекст и поведенческие факторы) и почему старые методы перестали работать. В центре внимания — качественный контент и пользовательский опыт (UX), а не технические уловки. Тем, кто хочет устойчивых позиций, обязательно к прочтению: https://nogmed.ru/ponimanie-dolgosrochnogo-haraktera-seo-v-2026-godu/
Greetings! This is my first visit to your blog! We are a collection of volunteers and starting a new initiative in a community in the same niche. Your blog provided us beneficial information. You have done a wonderful job!
You certainly deserve a round of applause for your post and more specifically, your blog in general. Very high quality material!
Хороший разбор текущих реалий SEO и важности долгосрочного подхода. Автор подробно рассказывает, почему поисковые системы всё больше внимания уделяют стабильности и качеству, а не временным всплескам активности. В статье затронуты эволюция алгоритмов, роль качественного контента и UX, а также эффективные методы для «SEO-марафона» — регулярный аудит, оптимизация, качественные ссылки и авторский контент. Рекомендую: https://gobelensalon.ru/tekushhie-realii-seo-i-vazhnost-dolgosrochnogo-podhoda/
узнать больше
Бонусы за регистрацию с промокодом Покерок
888starz link 888starz link .
I don’t normally comment on blogs.. But nice post! I just bookmarked your site
We need to build frameworks and funding mechanisms.
hop over to these guys leap wallet extension
continue reading this leap wallet extension
navigate here leap wallet
find out coin leap app
her comment is here leap wallet
check out the post right here leap wallet github
additional reading coin leap app
imp source leap wallet features
view leap wallet github
go to this web-site leap wallet features
click here now leap wallet
More Info coin leap app
click here to investigate leap wallet x official
useful site leap wallet features
see leap wallet twitter profile
check over here leap wallet dashboard
на этом сайте
Daddy casino промокод при регистрации
read this leap wallet x official
visit homepage leap wallet github
check this leap wallet dashboard
Source leap wallet extension
check out this site leap wallet x official
visit the site coin leap app
website here leap wallet dashboard
Перейти на сайт
Лекс казино промокод
click here for info leap cosmos wallet
check this coin leap app
i loved this coin leap app
about his leap wallet extension
navigate to this web-site leap wallet dashboard
click for more info leap wallet twitter profile
browse around this web-site leap wallet features
нажмите здесь
Приветственные бонусы по промокоду Покерок
linked here leap wallet extension
look what i found leap wallet x official
This Site leap wallet dashboard
look at this site leap wallet dashboard
перенаправляется сюда
Win777 casino промокод при регистрации
his response leap wallet features
check my source leapwallet
look at this website leap wallet x official
This Site leapwallet
visit this page leap wallet dashboard
на этом сайте
Бонусы за регистрацию с промокодом Kilogram казино
click here for info leapwallet
weblink coin leap app
his comment is here leap wallet dashboard
news coin leap app
read this coin leap app
have a peek at this web-site leap wallet x official
click for info leap wallet x official
why not try here leap wallet extension
read review leap wallet dashboard
visit this site right here leap wallet twitter profile
look at more info coin leap app
check out this site leap wallet dashboard
look here leap wallet
company website leap wallet x official
go now leap wallet twitter profile
this website leap wallet features
linked here leap wallet github
Bonuses leap cosmos wallet
go to these guys leap wallet github
official site leap wallet dashboard
basics leap cosmos wallet
his comment is here leap wallet features
why not try these out leapwallet
imp source leap wallet extension
look at this web-site leap wallet
посетить сайт
Auf casino промокод бонусы на депозит
click for info leap cosmos wallet
websites coin leap app
ссылка на сайт
Blitz промокод
read this leap wallet dashboard
Современный интерьер невозможно представить без электрокарнизы novo прокарниз, который обеспечивает максимальный комфорт в управлении шторами.
С помощью пульта можно легко регулировать положение штор без усилий.
Thank you for sharing this very good post. Very interesting ideas! (as always, btw)
такой
Приветственные бонусы по промокоду казино Betunlim
While this issue can vexed most people, my thought is that there has to be a middle or common ground that we all can find. I do value that you’ve added pertinent and sound commentary here though. Thank you!
I am lucky that I discovered this website , precisely the right info that I was searching for! .
Современный дом станет комфортнее с автоматические жалюзи с электроприводом на окна прокарниз, управляемыми голосом и мобильным приложением.
Одним из ключевых плюсов автоматических жалюзи является простота управления.
I simply could not leave your site before suggesting that I actually enjoyed the usual info a person supply in your visitors? Is going to be back often to inspect new posts
Сервис Kraken – лучший магазин моментальных покупок в Darknet
Сервис Kraken – одно из крупнейших сообществ Даркнета, где продаются разные психоактивные вещества, фальшивые документы и деньги, можно заплатить за доступ к чужим личным данным и аккаунтам.
kraken magazine ru.
Клиентам гарантирована максимальная конфиденциальность, а количество магазинов всё время растёт.
Товары и услуги на сайте Kraken
На сайте можно найти такие товары и услуги:
• Большой ассортимент наркотиков – от марихуаны и стимуляторов до опиатов и психоделиков.
• Обналичка Bitcoin.
• Взломанные аккаунты VPN-сервисов.
• Услуги хакеров.
• Паспорта, удостоверения, водительские права.
• Банковские карты и симки.
• Фальшивые купюры – обычно – от 1000 до 5000 рублей.
• Оборудование и приборы – камеры, жучки, электронные ключи.
Thanks for a Interesting item; I enjoyed it very much. Regards Sang Magistrale
Looking at real money casinos Pakistan is rapidly growing in the region right now. The security of transactions and fast payouts are guaranteed on these platforms. | Most sites provide mobile-friendly interfaces and 24/7 customer support. | Professional dealers and high-quality streams create a real atmosphere. ] Don’t miss your chance to win big on a trusted platform.
Fantastic piece of writing here1
Удобство и современный дизайн обеспечат жалюзи с автоматическим управлением Prokarniz, которые легко управляются с помощью пульта или смартфона.
Это делает их экономически выгодным вложением в долгосрочной перспективе.
Сервис Кракен – лучший магазин моментальных покупок Даркнета
Сервис Kraken Onion – лучший магазин в Даркнете, где есть почти любые психоактивные вещества, поддельные банкноты, паспорта и удостоверения, можно заплатить за доступ к чужим личным данным и аккаунтам.
зеркало кракен.
Покупателям обеспечивается полная анонимность, а число продавцов постоянно увеличивается.
Товары и услуги на Кракене
На Кракене встречаются такие предложения:
• Большой ассортимент наркотических средств – от марихуаны и стимуляторов до опиатов и психоделиков.
• Обналичивание Биткоинов.
• Платные подписки VPN-сервисов.
• Цифровые услуги.
• Паспорта, удостоверения, водительские права.
• Банковские карты и симки.
• Фальшивые купюры – в основном, 1000, 2000 и 5000 руб..
• Приборы и устрйоства – камеры, жучки, электронные ключи.
Современный электрокарниз готовый купить прокарниз позволяет автоматизировать процесс управления шторами с помощью пульта.
Профессиональный монтаж электрокарнизов занимает немного времени и не представляет сложностей.
The current market of real money casinos Pakistan is rapidly growing in the region right now. The security of transactions and fast payouts are guaranteed on these platforms. | New users can often claim generous welcome packages and loyalty rewards. | Professional dealers and high-quality streams create a real atmosphere. ] Don’t miss your chance to win big on a trusted platform.
Сервис Kraken – лучший магазин моментальных покупок Даркнета
Сервис Kraken – одно из крупнейших сообществ Даркнета, где продаются разные ПАВ, фальшивые документы и деньги, можно заплатить за доступ к чужим личным данным и аккаунтам.
кракен дарк шоп.
Клиентам гарантирована максимальная конфиденциальность, а количество магазинов постоянно увеличивается.
Что можно купить и заказать на сайте Kraken
В магазинах сервиса можно найти такие товары и услуги:
• Несколько видов наркотических средств – от травки и мета до ЛСД и кокаина.
• Обналичивание Bitcoin.
• Взломанные аккаунты ВПН.
• Услуги хакеров.
• Паспорта, удостоверения, водительские права.
• Банковские и SIM карты.
• Фальшивые купюры – в основном, 1000, 2000 и 5000 руб..
• Оборудование и приборы – камеры, жучки, электронные ключи.
yo ngl this site is lowkey addictive fr fr, like the interface is clean and ur not waiting forever for stuff to load tbh imo it slaps compared to other platforms i’ve used, definitely worth checking out eevobt
So my friend told me about this site last week and I was kinda skeptical at first but I checkt it out and honestly its pretty straitforward to navigate, like the interface doesnt make ur brain hurt trying to find stuff and I spent like an hour just poking around MostBet seeing what they had going on.
Современный электрокарниз акция обеспечивает удобство управления шторами с помощью пульта дистанционного управления.
Электрокарнизы — это новое слово в автоматизации открытия и закрытия штор.
The latest version is here : https://www.100bestsongs.ru/img/pages/promokod_pri_registracii_6.html
Сервис Kraken – лучший магазин моментальных покупок Даркнета
Торговая площадка Kraken – лучший магазин в Даркнете, где продаются разные ПАВ, фальшивые документы и деньги, предлагается взлом сайтов и пробив информации.
кракен действующая ссылка.
Посетителям обеспечивается полная анонимность, а число продавцов постоянно увеличивается.
Покупки на Кракене
В магазинах сервиса можно найти такие предложения:
• Несколько видов наркотических средств – от травки и мета до ЛСД и кокаина.
• Обналичивание криптовалют.
• Взломанные аккаунты VPN-сервисов.
• Услуги хакеров.
• Разные виды документов.
• Банковские карты и симки.
• Фальшивые деньги – в основном, 1000, 2000 и 5000 руб..
• Оборудование и приборы – камеры, жучки, электронные ключи.
browse around these guys https://anycoindirect.me/
check out this site https://daobase.io/
a fantastic read https://daobase.online
Сайт Кракен – лучший магазин моментальных покупок Даркнета
Торговая площадка Kraken Onion – лучший магазин Даркнета, где продаются разные психоактивные вещества, поддельные банкноты, паспорта и удостоверения, предлагается взлом сайтов и пробив информации.
кракин маркетплейс.
Посетителям гарантирована максимальная конфиденциальность, а число продавцов постоянно увеличивается.
Что можно купить и заказать на Кракене
На сайте можно найти такие предложения:
• Несколько видов наркотических средств – от марихуаны и стимуляторов до опиатов и психоделиков.
• Обналичивание криптовалют.
• Платные подписки ВПН.
• Цифровые услуги.
• Разные виды документов.
• Банковские и SIM карты.
• Поддельные банкноты – в основном, 1000, 2000 и 5000 руб..
• Приборы и устрйоства – камеры, жучки, электронные ключи.
Continued https://letsexchange.cc
you can find out more https://letsexchange.cc/
Современный интерьер невозможно представить без электрокарнизы для римских штор прокарниз, который обеспечивает максимальный комфорт в управлении шторами.
Такой подход особенно полезен при размещении штор на больших высотах.
Visit This Link https://mixmy.money/
my website https://tornadocash.app
see it here https://daobase.io
you could try this out https://swaplab.io/
Коллеги, хороший материал о долгосрочном характере SEO в 2026 году. Автор разбирает, как изменились алгоритмы поисковых систем (акцент на контекст и поведенческие факторы) и почему старые методы перестали работать. В центре внимания — качественный контент и пользовательский опыт (UX), а не технические уловки. Тем, кто хочет устойчивых позиций, обязательно к прочтению: https://nogmed.ru/ponimanie-dolgosrochnogo-haraktera-seo-v-2026-godu/
Сайт Кракен – лучший магазин моментальных покупок в Darknet
Сервис Kraken – лучший магазин в Даркнете, где есть почти любые позволяющие расслабиться препараты, фальшивые документы и деньги, можно заплатить за доступ к чужим личным данным и аккаунтам.
kraken зеркало официальный.
Покупателям обеспечивается полная анонимность, а количество магазинов постоянно увеличивается.
Что можно купить и заказать на сайте Kraken
В магазинах сервиса встречаются такие товары и услуги:
• Несколько видов наркотиков – от травки и мета до опиатов и психоделиков.
• Обналичивание Биткоинов.
• Взломанные аккаунты VPN.
• Цифровые услуги.
• Разные виды документов.
• Банковские и SIM карты.
• Фальшивые деньги – в основном, 1000, 2000 и 5000 руб..
• Оборудование и приборы – камеры, жучки, электронные ключи.
Visit Website https://letsexchange.cc
moved here https://bitmix.app
Современный дом станет комфортнее с жалюзи умный дом, управляемыми голосом и мобильным приложением.
Постоянное развитие технологий делает автоматические жалюзи всё более доступными для широкого круга пользователей.
visit the website https://letsexchange.cc/
read here https://letsexchange.cc
read this post here https://daobase.online
Сайт Kraken – лучшая торговая площадка Даркнета
Торговая площадка Кракен – лучший магазин в Даркнете, где продаются разные психоактивные вещества, фальшивые документы и деньги, можно заплатить за взлом сайтов и пробив информации.
kraken маркетплейс.
Посетителям гарантирована максимальная конфиденциальность, а число продавцов постоянно увеличивается.
Товары и услуги на Кракене
На Кракене встречаются такие товары и услуги:
• Несколько видов наркотических средств – от травки и мета до ЛСД и кокаина.
• Обналичка Bitcoin.
• Платные подписки VPN-сервисов.
• Цифровые услуги.
• Паспорта, удостоверения, водительские права.
• Телефонные и банковские карты.
• Фальшивые купюры – в основном, 1000, 2000 и 5000 руб..
• Оборудование и приборы – камеры, жучки, электронные ключи.
page https://tornadocash.app
go to these guys https://daobase.online/
visit here https://letsexchange.cc/
this post https://yomix.biz/
Удобство и современный дизайн обеспечат умные жалюзи на окна Прокарниз, которые легко управляются с помощью пульта или смартфона.
Такая функция удобна для занятых пользователей, которые хотят оптимизировать свое время и повысить комфорт дома.
на этом сайте https://xyeta.store/order/twitter-retvity/retvity-starye-profili-30-dney
пояснения накрутка просмотров РЅР° твиче
Узнать больше https://xyeta.store/order/telegram-reakcii/miks-reaktsiy-scream-cry
Сервис Kraken – лучшая торговая площадка Даркнета
Торговая площадка Kraken – лучший магазин Даркнета, где продаются разные ПАВ, поддельные банкноты, паспорта и удостоверения, предлагается взлом сайтов и пробив информации.
kraken darknet.
Клиентам гарантирована максимальная конфиденциальность, а число продавцов постоянно увеличивается.
Покупки на Кракене
В магазинах сервиса можно найти такие товары и услуги:
• Несколько видов наркотиков – от марихуаны и стимуляторов до ЛСД и кокаина.
• Обналичивание Bitcoin.
• Платные подписки VPN.
• Цифровые услуги.
• Паспорта, удостоверения, водительские права.
• Телефонные и банковские карты.
• Фальшивые купюры – обычно – от 1000 до 5000 рублей.
• Приборы и устрйоства – камеры, жучки, электронные ключи.
этот контент https://xyeta.store/order/vcru-reakcii/reaktsiya-heart
Коллеги, хороший материал о долгосрочном характере SEO в 2026 году. Автор разбирает, как изменились алгоритмы поисковых систем (акцент на контекст и поведенческие факторы) и почему старые методы перестали работать. В центре внимания — качественный контент и пользовательский опыт (UX), а не технические уловки. Тем, кто хочет устойчивых позиций, обязательно к прочтению: https://nogmed.ru/ponimanie-dolgosrochnogo-haraktera-seo-v-2026-godu/
подробнее https://xyeta.store/order/steam-laiki/layki-masterskaya-rukovodstvo
каталог сервис накрутки премиум подписчиков РІ тг
посмотреть в этом разделе https://xyeta.store/order/telegram-targetirovannye-prosmotry/na-post-kz
Подробнее здесь https://xyeta.store/order/telegram-prosmotry/na-poslednie-15-postov
можно проверить ЗДЕСЬ https://xyeta.store/order/tiktok-prosmotry-dlya-prodvizeniya/prosmotry-dlya-video-150-sek-uderzhanie-60-garantiya
посмотреть на этом сайте https://xyeta.store/order/instagram-prosmotry/prosmotry-ohvaty-video
сайт https://xyeta.store/order/telegram-kommentarii/angliya
узнать https://xyeta.store/order/likee-prosmotry
найти это https://xyeta.store/order/instagram-laiki/layki-momentalnyy-start-30-dney-garantii
Смотреть здесь лучший сервис хуета стор накрутка РІ тиктоке
можно проверить ЗДЕСЬ https://xyeta.store/order/telegram-premium-podpisciki-targetirovannye/ukraina-30-dney
Следующая страница купить комментарии РІ тг
сайт https://xyeta.store/order/dzen-docityvaniya/dochityvaniya-stati
Современный электрокарниз готовый купить Прокарниз позволяет автоматизировать процесс управления шторами с помощью пульта.
Автоматическое управление шторами позволяет контролировать свет и температуру в комнате.
нажмите https://xyeta.store/order/rutube-prosmotry/prosmotry-video-shorts-uderzhanie-180-min
сюда https://xyeta.store/order/unikalnyi-trafik-na-sait/lite
сюда https://xyeta.store/order/telegram-kommentarii/germaniya
здесь https://xyeta.store/order/rutube-laiki-v-top/layki-na-shorts-bystrye
посмотреть в этом разделе https://xyeta.store/order/telegram-premium-podpisciki-targetirovannye
Подробнее https://xyeta.store/order/telegram-reakcii/premium-reaktsii-sluchaynye
узнать https://xyeta.store/order/twitch-prosmotry/prosmotry-na-klip-medlennye-refill-30-dney
нажмите здесь https://xyeta.store/order/twitter-retvity/retvity-deshevye
посетить веб-сайт https://xyeta.store/order/vk-podpisciki/podpischiki-pablikgruppa-bez-garantii
каталог https://xyeta.store/order/telegram-reakcii/reaktsiya-scream-prosmotry
Сервис Kraken – лучшая торговая площадка в Darknet
Сервис Kraken – одно из крупнейших сообществ в Даркнете, где продаются разные ПАВ, поддельные банкноты, паспорта и удостоверения, предлагается доступ к чужим личным данным и аккаунтам.
кракен ру.
Посетителям гарантирована максимальная конфиденциальность, а количество магазинов постоянно увеличивается.
Что можно купить и заказать на Кракене
В магазинах сервиса можно найти такие предложения:
• Несколько видов наркотических средств – от травки и мета до опиатов и психоделиков.
• Обналичка криптовалют.
• Платные подписки ВПН.
• Услуги хакеров.
• Паспорта, удостоверения, водительские права.
• Банковские и SIM карты.
• Поддельные банкноты – в основном, 1000, 2000 и 5000 руб..
• Оборудование и приборы – от скрытых камер и жучков до флешек для взлома.
Смотреть здесь https://xyeta.store/order/dzen-laiki/layki-refill-90-dney
Источник https://xyeta.store/order/tiktok-prosmotry-dlya-prodvizeniya/prosmotry-dlya-video-150-sek-uderzhanie-60-garantiya
кликните сюда https://xyeta.store/order/telegram-reakcii/reaktsiya-broken-heart-prosmotry
узнать больше https://xyeta.store/order/vk-prosmotry/prosmotry-na-video-srednyaya-skorost
посетить сайт https://xyeta.store/order/dzen-podpisciki/podpischiki-na-kanal
можно проверить ЗДЕСЬ https://xyeta.store/order/tiktok-prosmotry/prosmotry-bystrye-garantiya-30-dney
зайти на сайт https://xyeta.store/order/telegram-premium-busty-bystrye
посмотреть на этом сайте сайт xyeta.store продвижение телеграм канала
проверить сайт https://xyeta.store/order/youtube-prosmotry/prosmotry-do-1ksutki-garantiya-30-dney
опубликовано здесь https://xyeta.store/order/instagram-laiki/layki-rossiya-sng-skorost-10000den
можно проверить ЗДЕСЬ https://xyeta.store/order/trovo-zriteli/zriteli-1-den
Современный электрокарнизы обеспечивает удобство управления шторами с помощью пульта дистанционного управления.
Технологическая составляющая электрокарнизов играет ключевую роль.
страница https://xyeta.store/order/twitter-reposty
Следующая страница https://xyeta.store/order/vcru-kommentarii
такой попробовать накрутку РІ спотифае без отписок
веб-сайт https://xyeta.store/order/stars-post/zvezdy-post-rezervnye
подробнее здесь https://xyeta.store/order/telegram-reakcii/reaktsiya-party-prosmotry
в этом разделе накрутить 1000 просмотров РІ лайки недорого
посетить сайт https://xyeta.store/order/telegram-premium-busty-privatnye-kanaly-bystrye
продолжить https://xyeta.store/order/youtube-prosmotry/prosmotry-unikalnye-i-aktivnye-prosmotry
веб-сайте https://xyeta.store/order/telegram-premium-kommentarii-targetirovannye/premium-kommentarii-rossiya
Смотреть здесь https://xyeta.store/order/tiktok-prosmotry-dlya-prodvizeniya/prosmotry-dlya-video-90-sek-uderzhanie-60-garantiya
зайти на сайт https://xyeta.store/order/telegram-premium-podpisciki/premium-podpischiki-45-dney
ссылка на сайт https://xyeta.store/order/telegram-premium-reposty-targetirovannye/premium-reposty-rossiya
Смотреть здесь https://xyeta.store/order/telegram-reakcii/reaktsiya-dove-prosmotry
ссылка на сайт https://xyeta.store/order/telegram-premium-busty-bystrye
посетить веб-сайт https://xyeta.store/order/telegram-reakcii/miks-reaktsiy-poop-clown
посетить сайт https://xyeta.store/order/rutube-prosmotry/prosmotry-video-shorts-realnye
найти это https://xyeta.store/order/telegram-reakcii/reaktsiya-ghost-prosmotry
здесь https://xyeta.store/order/rutube-reakcii/pozitivnye-reaktsii-bystryy-start-refill-30-dney
Сайт Kraken – лучшая торговая площадка в Darknet
Сервис Kraken – лучший магазин Даркнета, где продаются разные психоактивные вещества, фальшивые документы и деньги, предлагается доступ к чужим личным данным и аккаунтам.
ссылка на сайт кракен.
Клиентам обеспечивается полная анонимность, а число продавцов постоянно увеличивается.
Что можно купить и заказать на Кракене
На сайте можно найти такие предложения:
• Большой ассортимент наркотиков – от травки и мета до опиатов и психоделиков.
• Обналичивание Биткоинов.
• Взломанные аккаунты VPN.
• Цифровые услуги.
• Разные виды документов.
• Телефонные и банковские карты.
• Фальшивые деньги – в основном, 1000, 2000 и 5000 руб..
• Приборы и устрйоства – камеры, жучки, электронные ключи.
выберите ресурсы https://xyeta.store/order/rutube-prosmotry/prosmotry-video-shorts-uderzhanie-15-sek
Узнать больше https://xyeta.store/order/spotify-proslushivaniya/proslushivaniya-treka-evropa
этот сайт https://xyeta.store/order/trafik-na-sait/trafik-s-linkedin
на этом сайте https://xyeta.store/order/telegram-premium-realnye-podpisciki/premium-podpischiki-realnye-zhenschiny-rossiya
сюда https://xyeta.store/order/twitch-prosmotry/prosmotry-na-klip-bystrye
перенаправляется сюда купить ретвиты РІ твиттере
содержание https://xyeta.store/order/trafik-na-sait/trafik-s-youtube
кликните сюда https://xyeta.store/order/facebook-post-reaction/reaktsii-na-post-shocked
веб-сайте https://xyeta.store/order/rutube-prosmotry/prosmotry-video-shorts-uderzhanie-20-min
содержание https://xyeta.store/order/telegram-premium-reposty-targetirovannye/premium-reposty-miks
Good points – – it will make a difference with my parents.
посетить сайт https://xyeta.store/order/telegram-reakcii/reaktsiya-broken-heart-prosmotry
перейти на сайт https://xyeta.store/order/twitch-zriteli/zriteli-1-hour
читать https://xyeta.store/order/instagram-followers-cheap/podpischiki-10-extra-refill-30-dney
узнать https://xyeta.store/order/telegram-premium-podpisciki-targetirovannye/italiya-30-dney
Источник https://xyeta.store/order/rutube-laiki-v-top/layki-na-shorts-bystrye
Bonus review platforms give users a simple way to look through different gaming brands before visiting a platform. lizaro2casino.pl can be used as a casino information domain. The main goal is to keep the page useful and avoid unnecessary claims.
узнать больше быстрая накрутка просмотров РІ стиме
перейти на сайт antminer s21
موقع 888starz https://888starz-egypt2.com/
top article fortnite inventory checker
view it now telegram group invite tool
their explanation telegram marketing tool
find more info software for telegram automation
see here now telegram marketing software
my company fortnite match tracker
this hyperlink telegram interaction bot
here fortnite locker worth
Going Here analyze fortnite inventory
Extra resources fortnite skin inventory checker
like it fortnite locker items
Recommended Site Telegram Expert updates
about his check fortnite inventory
find more information fortnite tracker free
investigate this site telegram auto posting software
site telegram outreach software
you can try here Telegram Expert documentation
888starbet http://www.888starz-uzbekistan2.com/ .
888starz kz http://www.888starz-uzbekistan2.com/ .
888starz bet зеркало https://888starz-uzbekistan2.com/ .
official website fortnite locker value checker
check out the post right here telegram dm automation
oshi-casino-norge.com/
these details fortnite skin inventory checker
helpful site fortnite stats online
8888 website https://888starz-egypt7.com/
888starz review https://888starz-uzbekistan2.com .
hop over to these guys telegram chat scraper
this page fortnite locker value checker
website link fortnite locker analyzer
read the full info here Telegram Expert program
stars 888 https://888starz-egypt7.com/
888 stars http://uz888-starz.com .
888starz 1xbet https://888starz-egypt7.com/
click this link now fortnite locker items
article source fortnite inventory checker
find here Telegram Expert documentation
Thanks for some other great post. Where else may anybody get that kind of information in such an ideal method of writing? I’ve a presentation next week, and I am at the look for such information.
see this site fortnite locker items
Recommended Reading telegram promotion system
Read Full Report telegram audience scraper
Its like you read my mind! You seem to know a lot about this, like you wrote the book in it or something. I think that you can do with some pics to drive the message home a bit, but other than that, this is wonderful blog. A great read. I’ll certainly be back.
lucky-tiger-casino-canada.com/aviator/
discover this telegram marketing strategy
Developing a framework is important.
888stsrz 888stsrz .
888starz betting http://www.888starz-uzbekistan2.com .
888ستارز https://888starz-egypt7.com/
888srarz 888srarz .
Simply wish to say the frankness in your article is surprising.
888starx https://888starz-egypt7.com/
Hello, I think your blog might be having browser compatibility issues. When I look at your website in Chrome, it looks fine but when opening in Internet Explorer, it has some overlapping. I just wanted to give you a quick heads up! Other than that, awesome blog!
great site telegram channel invite software
888stars https://888starz-egypt7.com/
Great resources and tips for families here.
Хороший разбор текущих реалий SEO и важности долгосрочного подхода. Автор подробно рассказывает, почему поисковые системы всё больше внимания уделяют стабильности и качеству, а не временным всплескам активности. В статье затронуты эволюция алгоритмов, роль качественного контента и UX, а также эффективные методы для «SEO-марафона» — регулярный аудит, оптимизация, качественные ссылки и авторский контент. Рекомендую: https://gobelensalon.ru/tekushhie-realii-seo-i-vazhnost-dolgosrochnogo-podhoda/
888 старз [url=https://888starz-uzbekistan2.com]888 старз[/url] .
I would really like to appreciate the endeavors you cash in on written this article. I’m going for the similar best product from you finding out in the foreseeable future as well. Actually your creative writing abilities has urged me to begin my very own blog now. Genuinely the blogging is distributing its wings rapidly. Your write down is often a fine illustration showing it.
برنامج مراهنات 888starz https://888starz-egypt7.com/
go to this web-site telegram channel growth software
i thought about this https://cleanthebit.com/es/
why not look here https://cleanthebit.com/fr/
learn the facts here now https://cleanthebit.com/fr/
my sources https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
browse around this website https://quarklab.ru/
important source https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
click for source https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
company website https://cleanthebit.com/zh/
navigate to this web-site https://cleanthebit.com/
click now https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
hop over to these guys https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
content https://cleanthebit.com/fr/
888satrz 888satrz .
additional hints https://cleanthebit.com/zh/
visite site https://quarklab.ru/fr/crypto-drainer/
recommended you read https://quarklab.ru/fr/crypto-drainer/
more tips here https://quarklab.ru/es/drenador-de-cripto/
888satrz 888satrz .
news https://cleanthebit.com/ru/
visit this site right here https://cleanthebit.com/ru/
have a peek at these guys https://cleanthebit.com/hi/
pop over to these guys https://quarklab.ru/es/drenador-de-cripto/
you can try this out https://cleanthebit.com/
my company https://quarklab.ru/es/drenador-de-cripto/
visit the site https://cleanthebit.com/es/
check it out https://cleanthebit.com/
read the article https://quarklab.ru/fr/crypto-drainer/
Find Out More https://cleanthebit.com/
that site https://cleanthebit.com/fr/
get more https://quarklab.ru/fr/crypto-drainer/
go right here https://quarklab.ru/es/drenador-de-cripto/
browse around this web-site https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
image source https://quarklab.ru/fr/crypto-drainer/
8stars https://888starz-egypt7.com/
additional resources https://cleanthebit.com/hi/
web link https://cleanthebit.com/
click this link now https://cleanthebit.com/zh/
next page https://quarklab.ru/fr/crypto-drainer/
go to this web-site https://quarklab.ru/es/drenador-de-cripto/
888starz crash https://888starz-egypt7.com/
read this article https://cleanthebit.com/es/
check https://cleanthebit.com/
browse around here https://cleanthebit.com/fr/
important site https://quarklab.ru/es/drenador-de-cripto/
starz88 http://www.888starz-uzbekistan2.com .
navigate to this site https://quarklab.ru/fr/crypto-drainer/
click over here now https://quarklab.ru/es/drenador-de-cripto/
go to my blog https://cleanthebit.com/hi/
hop over to these guys https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
888starz casino официальный сайт 888starz casino официальный сайт .
More about the author https://quarklab.ru/fr/crypto-drainer/
about his https://cleanthebit.com/es/
over here https://cleanthebit.com/ru/
find https://cleanthebit.com/es/
Get More Information https://cleanthebit.com/hi/
888starz bet 888starz bet .
index https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
Get More Info https://cleanthebit.com/es/
see https://quarklab.ru/fr/crypto-drainer/
their explanation https://cleanthebit.com/fr/
888starz eg https://888starz-egypt7.com/
check here https://cleanthebit.com/ru/
my site https://quarklab.ru/es/drenador-de-cripto/
Discover More https://cleanthebit.com/zh/
بوكر تكساس https://888starz-egypt7.com/
казино 888 казино 888 .
visit this website https://cleanthebit.com/
check out here https://cleanthebit.com/
check this link right here now https://cleanthebit.com/fr/
navigate here https://cleanthebit.com/fr/
important link https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
over here https://cleanthebit.com/hi/
Коллеги, хороший материал о долгосрочном характере SEO в 2026 году. Автор разбирает, как изменились алгоритмы поисковых систем (акцент на контекст и поведенческие факторы) и почему старые методы перестали работать. В центре внимания — качественный контент и пользовательский опыт (UX), а не технические уловки. Тем, кто хочет устойчивых позиций, обязательно к прочтению: https://nogmed.ru/ponimanie-dolgosrochnogo-haraktera-seo-v-2026-godu/
check my blog https://quarklab.ru/fr/crypto-drainer/
try these out https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
see here https://quarklab.ru/
read https://quarklab.ru/es/drenador-de-cripto/
discover here https://cleanthebit.com/ru/
webpage https://quarklab.ru/
additional reading https://cleanthebit.com/fr/
888starz.bet 888starz.bet .
try these out https://quarklab.ru/
888starz تسجيل الدخول مراهنات https://888starz-egypt7.com/
more information https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
Discover More https://cleanthebit.com/hi/
link https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
a fantastic read https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
888 star 888 star .
888 казино 888 казино .
next page https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
888starz تسجيل الدخول مراهنات https://888starz-egypt7.com/
look these up https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
Read Full Article https://cleanthebit.com/zh/
link https://cleanthebit.com/hi/
read here https://quarklab.ru/
other https://cleanthebit.com/hi/
you can try these out https://cleanthebit.com/ru/
navigate to this web-site https://quarklab.ru/fr/crypto-drainer/
published here https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
88start https://888starz-egypt7.com/
check it out https://cleanthebit.com/ru/
link https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
you can check here https://quarklab.ru/fr/crypto-drainer/
here https://quarklab.ru/
helpful site https://cleanthebit.com/ru/
recommended you read https://cleanthebit.com/ru/
Going Here https://cleanthebit.com/
review https://cleanthebit.com/ru/
look at this now https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
تحميل كازينو 888 https://888starz-egypt7.com/
موقع 888 للمراهنات https://888starz-egypt7.com/
this content https://cleanthebit.com/ru/
visit this web-site https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
my sources https://cleanthebit.com/zh/
Bonuses https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
click to investigate https://cleanthebit.com/es/
why not find out more https://cleanthebit.com/ru/
website link https://cleanthebit.com/hi/
learn this here now https://cleanthebit.com/zh/
useful site https://cleanthebit.com/hi/
click reference https://quarklab.ru/
Continue Reading https://quarklab.ru/fr/crypto-drainer/
get more https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
Discover More Here https://cleanthebit.com/zh/
look at here now https://quarklab.ru/fr/crypto-drainer/
news https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
check out here https://quarklab.ru/fr/crypto-drainer/
you can try this out https://quarklab.ru/fr/crypto-drainer/
additional reading https://cleanthebit.com/
see this https://cleanthebit.com/zh/
a knockout post https://cleanthebit.com/es/
my website https://cleanthebit.com/ru/
over at this website https://quarklab.ru/
Check Out Your URL https://cleanthebit.com/es/
browse around here https://cleanthebit.com/es/
their explanation https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
you can look here https://quarklab.ru/fr/crypto-drainer/
look at here now https://quarklab.ru/
click for more https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
click here to find out more https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
Related Site https://quarklab.ru/fr/crypto-drainer/
click for more info https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
Recommended Site https://quarklab.ru/fr/crypto-drainer/
Web Site https://cleanthebit.com/
888starz сайт 888starz сайт .
read this post here https://cleanthebit.com/ru/
find this https://quarklab.ru/es/drenador-de-cripto/
these details https://cleanthebit.com/zh/
view website https://quarklab.ru/fr/crypto-drainer/
click over here now https://cleanthebit.com/es/
site here https://cleanthebit.com/fr/
article source https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
check my blog https://quarklab.ru/
view publisher site https://cleanthebit.com/
This Site https://cleanthebit.com/es/
view website https://cleanthebit.com/fr/
my explanation https://cleanthebit.com/
Clicking Here https://quarklab.ru/
find https://quarklab.ru/
you can try here https://cleanthebit.com/hi/
click now https://cleanthebit.com/zh/
look at here https://quarklab.ru/fr/crypto-drainer/
find out here now https://cleanthebit.com/ru/
discover this https://cleanthebit.com/hi/
stars 88 https://888starz-egypt7.com/
additional resources https://quarklab.ru/fr/crypto-drainer/
click here for more info https://cleanthebit.com/fr/
right here https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
check out the post right here https://cleanthebit.com/
click to investigate https://cleanthebit.com/es/
here are the findings https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
وكيل 888starz https://888starz-egypt2.com/
he said https://quarklab.ru/fr/crypto-drainer/
a knockout post https://quarklab.ru/es/drenador-de-cripto/
Discover More Here https://cleanthebit.com/es/
Learn More https://quarklab.ru/
this link https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
this contact form https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
investigate this site https://cleanthebit.com/
link https://cleanthebit.com/es/
Your Domain Name https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
go https://quarklab.ru/es/drenador-de-cripto/
find out https://quarklab.ru/
my latest blog post https://cleanthebit.com/
8888 bet 8888 bet .
weblink https://cleanthebit.com/zh/
read https://cleanthebit.com/hi/
Home Page https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
great post to read https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
go to this website https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
browse around here https://cleanthebit.com/hi/
look at more info https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
browse around these guys https://quarklab.ru/fr/crypto-drainer/
find here https://quarklab.ru/fr/crypto-drainer/
888staz 888staz .
over here https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
useful reference https://cleanthebit.com/hi/
visit this page https://cleanthebit.com/fr/
great site https://cleanthebit.com/es/
موقع 888starz https://888starz-egypt7.com/
important source https://quarklab.ru/es/drenador-de-cripto/
official website https://cleanthebit.com/hi/
index https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
go now https://cleanthebit.com/es/
21bit-casino-norge.com/about-casino/
888satrz https://888starz-egypt7.com/
this website https://quarklab.ru/
888starz crash https://888starz-egypt7.com/
check my blog https://quarklab.ru/es/drenador-de-cripto/
resource https://cleanthebit.com/fr/
index https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
important source https://cleanthebit.com/ru/
official site https://quarklab.ru/es/drenador-de-cripto/
his response https://cleanthebit.com/es/
imp source https://cleanthebit.com/ru/
my sources https://quarklab.ru/es/drenador-de-cripto/
you can look here https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
read the full info here https://quarklab.ru/fr/crypto-drainer/
important link https://cleanthebit.com/zh/
webpage https://cleanthebit.com/hi/
read this post here https://cleanthebit.com/hi/
discover this info here https://cleanthebit.com/
he said https://quarklab.ru/
click over here now https://cleanthebit.com/hi/
read more https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
click resources https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
look these up https://quarklab.ru/fr/crypto-drainer/
see this here https://cleanthebit.com/
a knockout post https://quarklab.ru/es/drenador-de-cripto/
imp source https://cleanthebit.com/hi/
Related Site https://cleanthebit.com/es/
click this link now https://quarklab.ru/
sia-casino-canada.com/
click for source https://cleanthebit.com/fr/
go now https://cleanthebit.com/fr/
explanation https://quarklab.ru/es/drenador-de-cripto/
try this out https://quarklab.ru/
you can look here https://cleanthebit.com/
look here https://quarklab.ru/fr/crypto-drainer/
my company https://cleanthebit.com/ru/
company website https://cleanthebit.com/hi/
advice https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
look here https://cleanthebit.com/es/
published here https://cleanthebit.com/
look at these guys https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
navigate to this website https://quarklab.ru/es/drenador-de-cripto/
view website https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
read this article https://quarklab.ru/fr/crypto-drainer/
try here https://cleanthebit.com/ru/
why not try this out https://cleanthebit.com/ru/
Thanks for discussing the issues and covering them in a well written format.
888 statz 888 statz .
navigate to this website https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
playamo-casino-austria.com/
Thanks a bunch for sharing this with all people you really recognize what you are talking about! Bookmarked. Kindly also seek advice from my web site =). We can have a link alternate contract between us!
Hey very cool site!! Man .. Beautiful .. Amazing .. I will bookmark your website and take the feeds also…I’m happy to find so many useful information here in the post, we need develop more strategies in this regard, thanks for sharing. . . . . .
his comment is here https://daobase.online
find out here https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
fantastic post, very informative. I wonder why more of the ther experts in the field do not break it down like this. You should continue your writing. I am confident, you have a great readers’ base already!
like this https://anycoindirect.me/
why not try here https://quarklab.ru/fr/crypto-drainer/
find more https://tornadocash.app/
why not try this out https://anycoindirect.me/
pop over to this site https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
useful site https://daobase.info/
YourDoll株式会社 驚くべき恋人の調査–ThePerfectGirlfriend.Sexレビュー
I like to spend my free time by scanning various internet resources. Today I came across your website and I found it has some of the most practical and helpful information I’ve seen.
read more https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
888starz عربي https://888starz-egypt7.com/
Beneficial Blog! I had been simply just debating that there are plenty of screwy results at this issue you now purely replaced my personal belief. Thank you an excellent write-up.
888az https://888starz-egypt7.com/
view https://mixmy.money/
Your thing regarding creating will be practically nothing in short supply of awesome. This informative article is incredibly useful and contains offered myself a better solution to be able to my own issues. Which can be the specific purpose MY PARTNER AND I has been doing a search online. I am advocating this informative article with a good friend. I know they are going to get the write-up since beneficial as i would. Yet again many thanks.
рутор орг сейчас.
Rutor: Ветеран русскоязычного даркнета, переживший крах “Гидры”
Rutor — ветеран русскоязычного даркнета, активно действующий с начала 2010-х. Форум пережил период доминирования “Гидры” и продолжает функционировать после ее исчезновения в 2022 году. Несмотря на смену владельцев в начале 2022, Rutor сохранил доверие пользователей как платформа для теневой торговли и общения.
?? Центральное место на Rutor занимает торговый раздел, где пользователи могут найти предложения от проверенных поставщиков, специализирующихся на:
* Различных психоактивных субстанциях.
* Цифровых товарах и программном обеспечении.
* Услугах, направленных на обеспечение конфиденциальности, финансовые операции и OSINT.
?? Для безопасности транзакций действует система гаранта. Встроенный мессенджер с анонимными записками, не связанными с профилем, обеспечивает дополнительную конфиденциальность, снижая риски взлома данных.
??? Доступ к Rutor строго ограничен сетью Tor и осуществляется по onion-ссылке. Регистрация, как правило, требует наличия инвайта или прохождения верификации, что помогает отсеивать нежелательных пользователей, включая ботов и представителей правоохранительных органов. Модерация ориентирована на поддержание деловой этики площадки, а не на навязывание строгой цензуры.
?? После реорганизации Rutor стал более закрытым, но сохранил свою базу пользователей и стабильность. Он остается важной вехой в истории русского даркнета.
read what he said https://mixmy.money/
888starbet http://888starz-uzbekistan2.com .
888starz com 888starz com .
click for info https://yomix.biz/
why not find out more https://daobase.online/
website link https://daobase.online
More Info https://swaplab.io
Full Article https://cleanthebit.com/ru/
Visit This Link https://cleanthebit.com/ru/
here are the findings https://cleanthebit.com/ru/
find out this here https://daobase.info/
find out here now https://cleanthebit.com/zh/
top article https://daobase.io/
рутор орг.
Rutor ??: Непреходящая классика русскоязычного даркнета, выстоявшая против перемен
Rutor, один из старейших и наиболее устойчивых форумов в русскоязычном даркнете, продолжает свою деятельность с начала 2010-х годов, продемонстрировав исключительную живучесть даже после ликвидации “Гидры” в 2022 году. Несмотря на смену руководства в начале того же года, площадка сумела сохранить свою репутацию надежной платформы для теневых операций и коммуникации.
?? Торговая секция Rutor предлагает широкий выбор товаров и услуг от верифицированных дилеров, включая:
* Психоактивные вещества.
* Цифровой контент и софт.
* Сервисы анонимности, обналичивания и OSINT.
?? Для обеспечения безопасности осуществляемых сделок на Rutor действует механизм гаранта. Кроме того, для максимально конфиденциального общения предусмотрен встроенный мессенджер с функцией анонимных записок, которые не требуют привязки к учетной записи. Это снижает вероятность компрометации данных пользователей, даже если их аккаунт будет подвергнут риску.
??? Доступ к Rutor строго ограничен сетью Tor и осуществляется по onion-ссылке. Регистрация, как правило, требует наличия инвайта или прохождения верификации, что помогает отсеивать нежелательных пользователей, включая ботов и представителей правоохранительных органов. Модерация ориентирована на поддержание деловой этики площадки, а не на навязывание строгой цензуры.
?? После реорганизации Rutor стал более закрытым, но сохранил свою базу пользователей и стабильность. Он остается важной вехой в истории русского даркнета.
ستار مرهنات [url=https://www.888starz-egypt7.com]https://888starz-egypt7.com/[/url]
visit this page https://quarklab.ru/es/drenador-de-cripto/
anonymous https://daobase.info
تسجيل دخول 888 ستارز https://888starz-egypt7.com/
888starz 888starz .
new rutor org.
Rutor: Независимая площадка русскоязычного даркнета, устоявшая после “Гидры”
Rutor — ветеран русскоязычного даркнета, активно действующий с начала 2010-х. Форум пережил период доминирования “Гидры” и продолжает функционировать после ее исчезновения в 2022 году. Несмотря на смену владельцев в начале 2022, Rutor сохранил доверие пользователей как платформа для теневой торговли и общения.
?? Центральное место на Rutor занимает торговый раздел, где пользователи могут найти предложения от проверенных поставщиков, специализирующихся на:
* Различных психоактивных субстанциях.
* Цифровых товарах и программном обеспечении.
* Услугах, направленных на обеспечение конфиденциальности, финансовые операции и OSINT.
?? Безопасность сделок на Rutor обеспечивается встроенной системой гаранта. Для защиты конфиденциальности пользователей предусмотрен мессенджер с функционалом анонимных заметок, которые не привязаны к аккаунтам. Такой подход минимизирует риски утечки личных данных даже в случае взлома профиля.
??? Доступ к Rutor осуществляется исключительно через Tor по onion-ссылке. Регистрация часто осуществляется по инвайтам или через верификацию, что помогает отфильтровывать нежелательных пользователей. Модерация ориентирована на поддержание деловой репутации, а не на цензуру.
?? После смены владельцев Rutor стал еще более закрытым, но при этом сохранил свою лояльную аудиторию и техническую стабильность. Для многих участников он является не просто форумом, а значимым символом в истории развития русского даркнета.
Важное предупреждение: Использование ресурсов, на которых осуществляется торговля запрещенными товарами или услугами, может быть расценено как участие в противоправной деятельности и привести к уголовной ответственности.
you can try here https://mixmy.money
rutor info new.
Rutor: Ветеран русскоязычного даркнета, переживший крах “Гидры”
Rutor, один из старейших и наиболее устойчивых форумов в русскоязычном даркнете, продолжает свою деятельность с начала 2010-х годов, продемонстрировав исключительную живучесть даже после ликвидации “Гидры” в 2022 году. Несмотря на смену руководства в начале того же года, площадка сумела сохранить свою репутацию надежной платформы для теневых операций и коммуникации.
?? Главное преимущество Rutor — его торговый раздел, где представлен широкий спектр товаров и услуг от проверенных продавцов:
* Психоактивные вещества.
* Цифровые товары и программное обеспечение.
* Сервисы, связанные с обеспечением анонимности, конвертацией средств и OSINT.
?? Для безопасности транзакций действует система гаранта. Встроенный мессенджер с анонимными записками, не связанными с профилем, обеспечивает дополнительную конфиденциальность, снижая риски взлома данных.
??? Доступ к Rutor строго ограничен сетью Tor и осуществляется по onion-ссылке. Регистрация, как правило, требует наличия инвайта или прохождения верификации, что помогает отсеивать нежелательных пользователей, включая ботов и представителей правоохранительных органов. Модерация ориентирована на поддержание деловой этики площадки, а не на навязывание строгой цензуры.
?? После реорганизации Rutor стал более закрытым, но сохранил свою базу пользователей и стабильность. Он остается важной вехой в истории русского даркнета.
view it now https://swaplab.io/
888starz التسجيل https://888starz-egypt7.com/
888 starz зеркало 888 starz зеркало .
Look At This https://quarklab.ru/es/drenador-de-cripto/
index https://quarklab.ru/fr/crypto-drainer/
useful reference https://quarklab.ru/fr/crypto-drainer/
рутор зеркало рабочее сегодня прямо сейчас.
Rutor ??: Непреходящая классика русскоязычного даркнета, выстоявшая против перемен
Rutor — ветеран русскоязычного даркнета, активно действующий с начала 2010-х. Форум пережил период доминирования “Гидры” и продолжает функционировать после ее исчезновения в 2022 году. Несмотря на смену владельцев в начале 2022, Rutor сохранил доверие пользователей как платформа для теневой торговли и общения.
?? Главное преимущество Rutor — его торговый раздел, где представлен широкий спектр товаров и услуг от проверенных продавцов:
* Психоактивные вещества.
* Цифровые товары и программное обеспечение.
* Сервисы, связанные с обеспечением анонимности, конвертацией средств и OSINT.
?? Для обеспечения безопасности осуществляемых сделок на Rutor действует механизм гаранта. Кроме того, для максимально конфиденциального общения предусмотрен встроенный мессенджер с функцией анонимных записок, которые не требуют привязки к учетной записи. Это снижает вероятность компрометации данных пользователей, даже если их аккаунт будет подвергнут риску.
??? Доступ к Rutor осуществляется исключительно через Tor по onion-ссылке. Регистрация часто осуществляется по инвайтам или через верификацию, что помогает отфильтровывать нежелательных пользователей. Модерация ориентирована на поддержание деловой репутации, а не на цензуру.
?? После реорганизации Rutor стал более закрытым, но сохранил свою базу пользователей и стабильность. Он остается важной вехой в истории русского даркнета.
navigate to this site https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
visit the website https://quarklab.ru/
informative post https://cleanthebit.com/
88 stars https://888starz-egypt7.com/
click this link now https://cleanthebit.com/hi/
more information https://cleanthebit.com/hi/
official source https://quarklab.ru/
the original source https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
check out this site https://quarklab.ru/fr/crypto-drainer/
here https://cleanthebit.com/zh/
navigate to this website https://cleanthebit.com/es/
visit their website https://cleanthebit.com/hi/
navigate to this web-site https://cleanthebit.com/fr/
a fantastic read https://cleanthebit.com/fr/
his response https://cleanthebit.com/zh/
visit our website https://cleanthebit.com/zh/
check out this site https://cleanthebit.com/es/
888starz تسجيل دخول 888starz تسجيل دخول.
additional info https://cleanthebit.com/fr/
check my source https://cleanthebit.com/zh/
find here https://cleanthebit.com/fr/
this article https://quarklab.ru/es/drenador-de-cripto/
click here to read https://cleanthebit.com/
browse around this web-site https://quarklab.ru/es/drenador-de-cripto/
additional reading https://cleanthebit.com/hi/
like this https://cleanthebit.com/hi/
look at this now https://quarklab.ru/fr/crypto-drainer/
description https://cleanthebit.com/zh/
site here https://quarklab.ru/
Website https://cleanthebit.com/es/
directory https://cleanthebit.com/
see here https://cleanthebit.com/fr/
see this https://cleanthebit.com/hi/
official source https://cleanthebit.com/zh/
go to this website https://cleanthebit.com/hi/
go now https://cleanthebit.com/zh/
YOURURL.com https://quarklab.ru/
additional info https://cleanthebit.com/zh/
visit this site https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
discover this https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
check out the post right here https://cleanthebit.com/ru/
pop over to this web-site https://quarklab.ru/es/drenador-de-cripto/
you can try these out https://cleanthebit.com/es/
click here to read https://cleanthebit.com/hi/
http 6tor org.
Rutor: Ветеран русскоязычного даркнета, переживший крах “Гидры”
Rutor — ветеран русскоязычного даркнета, активно действующий с начала 2010-х. Форум пережил период доминирования “Гидры” и продолжает функционировать после ее исчезновения в 2022 году. Несмотря на смену владельцев в начале 2022, Rutor сохранил доверие пользователей как платформа для теневой торговли и общения.
?? Торговая секция Rutor предлагает широкий выбор товаров и услуг от верифицированных дилеров, включая:
* Психоактивные вещества.
* Цифровой контент и софт.
* Сервисы анонимности, обналичивания и OSINT.
?? Для безопасности транзакций действует система гаранта. Встроенный мессенджер с анонимными записками, не связанными с профилем, обеспечивает дополнительную конфиденциальность, снижая риски взлома данных.
??? Доступ к Rutor строго ограничен сетью Tor и осуществляется по onion-ссылке. Регистрация, как правило, требует наличия инвайта или прохождения верификации, что помогает отсеивать нежелательных пользователей, включая ботов и представителей правоохранительных органов. Модерация ориентирована на поддержание деловой этики площадки, а не на навязывание строгой цензуры.
?? После перехода под новое руководство Rutor стал еще более эксклюзивным, однако сумел сохранить преданное сообщество и техническую надежность. Для многих он является не просто онлайн-площадкой, а отражением эволюции русского даркнета.
visit their website https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
learn the facts here now https://cleanthebit.com/hi/
why not try these out https://cleanthebit.com/fr/
navigate to this site https://cleanthebit.com/ru/
useful reference https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
More about the author https://quarklab.ru/
Loving the info on this website , you have done outstanding job on the blog posts.
browse this site https://quarklab.ru/
Look At This https://cleanthebit.com/ru/
check this site out https://quarklab.ru/es/drenador-de-cripto/
Please let us know when you plan to publish your book!
have a peek at this web-site https://cleanthebit.com/es/
read what he said https://quarklab.ru/fr/crypto-drainer/
more info here https://cleanthebit.com/
read review https://cleanthebit.com/fr/
find out here https://cleanthebit.com/hi/
see this page https://cleanthebit.com/hi/
visit this site https://cleanthebit.com/zh/
read what he said https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
you could look here https://cleanthebit.com/fr/
Appreciation for taking the time to discuss this topic, I would love to discover more on this topic. If viable, as you gain expertise, would you object to updating the website with further information? It is tremendously beneficial for me.
More Bonuses https://cleanthebit.com/hi/
check this link right here now https://quarklab.ru/
Check Out Your URL https://cleanthebit.com/hi/
check that https://cleanthebit.com/hi/
check this link right here now https://quarklab.ru/fr/crypto-drainer/
see this site https://cleanthebit.com/hi/
look at this website https://quarklab.ru/fr/crypto-drainer/
like it https://cleanthebit.com/ru/
check these guys out https://quarklab.ru/fr/crypto-drainer/
a fantastic read https://cleanthebit.com/ru/
this https://quarklab.ru/fr/crypto-drainer/
here https://cleanthebit.com/fr/
I’ve thought about posting something about this before. Good job! Can I use part of your post in my blog?
get more https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
my response https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
This information is critically needed, thanks.
weblink https://quarklab.ru/es/drenador-de-cripto/
this contact form https://quarklab.ru/
official site https://quarklab.ru/
888starz. https://888starz-egypt7.com/
888starz الموقع الرسمي https://888starz-egypt7.com/
find out this here https://quarklab.ru/fr/crypto-drainer/
look at here now https://cleanthebit.com/zh/
рутор зеркало новый.
Rutor ??: Непреходящая классика русскоязычного даркнета, выстоявшая против перемен
Rutor — ветеран русскоязычного даркнета, активно действующий с начала 2010-х. Форум пережил период доминирования “Гидры” и продолжает функционировать после ее исчезновения в 2022 году. Несмотря на смену владельцев в начале 2022, Rutor сохранил доверие пользователей как платформа для теневой торговли и общения.
?? Центральное место на Rutor занимает торговый раздел, где пользователи могут найти предложения от проверенных поставщиков, специализирующихся на:
* Различных психоактивных субстанциях.
* Цифровых товарах и программном обеспечении.
* Услугах, направленных на обеспечение конфиденциальности, финансовые операции и OSINT.
?? Безопасность сделок на Rutor обеспечивается встроенной системой гаранта. Для защиты конфиденциальности пользователей предусмотрен мессенджер с функционалом анонимных заметок, которые не привязаны к аккаунтам. Такой подход минимизирует риски утечки личных данных даже в случае взлома профиля.
??? Доступ к Rutor предоставляется исключительно через защищенную сеть Tor по onion-ссылке. Процесс регистрации зачастую требует инвайта или дополнительной верификации, что служит барьером для автоматизированных систем и представителей правоохранительных органов. Модерация ориентирована на соблюдение деловых стандартов и поддержание репутации площадки, а не на жесткую цензуру.
?? После реорганизации Rutor стал более закрытым, но сохранил свою базу пользователей и стабильность. Он остается важной вехой в истории русского даркнета.
my site https://cleanthebit.com/ru/
important source https://cleanthebit.com/hi/
visit here https://quarklab.ru/es/drenador-de-cripto/
try this site https://cleanthebit.com/hi/
go to the website https://cleanthebit.com/fr/
more tips here https://cleanthebit.com/es/
look at here now https://cleanthebit.com/ru/
these details https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
pop over to these guys https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
try this site https://cleanthebit.com/ru/
websites https://cleanthebit.com/
about his https://quarklab.ru/es/drenador-de-cripto/
next page https://cleanthebit.com/
check my site https://cleanthebit.com/es/
read what he said https://quarklab.ru/fr/crypto-drainer/
navigate to these guys https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
continue reading this https://cleanthebit.com/es/
click here now https://quarklab.ru/
learn this here now https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
here https://cleanthebit.com/zh/
my explanation https://cleanthebit.com/
see it here https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
her comment is here https://quarklab.ru/es/drenador-de-cripto/
Discover More https://cleanthebit.com/ru/
resource https://cleanthebit.com/zh/
find out here https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
navigate here https://cleanthebit.com/ru/
her explanation https://cleanthebit.com/es/
like this https://quarklab.ru/fr/crypto-drainer/
my company https://cleanthebit.com/fr/
directory https://quarklab.ru/fr/crypto-drainer/
go https://quarklab.ru/fr/crypto-drainer/
YOURURL.com https://quarklab.ru/fr/crypto-drainer/
click for more info https://quarklab.ru/fr/crypto-drainer/
their explanation https://quarklab.ru/es/drenador-de-cripto/
new rutor info зеркало.
Rutor: Независимая площадка русскоязычного даркнета, устоявшая после “Гидры”
Rutor — ветеран русскоязычного даркнета, активно действующий с начала 2010-х. Форум пережил период доминирования “Гидры” и продолжает функционировать после ее исчезновения в 2022 году. Несмотря на смену владельцев в начале 2022, Rutor сохранил доверие пользователей как платформа для теневой торговли и общения.
?? Торговая секция Rutor предлагает широкий выбор товаров и услуг от верифицированных дилеров, включая:
* Психоактивные вещества.
* Цифровой контент и софт.
* Сервисы анонимности, обналичивания и OSINT.
?? Для безопасности транзакций действует система гаранта. Встроенный мессенджер с анонимными записками, не связанными с профилем, обеспечивает дополнительную конфиденциальность, снижая риски взлома данных.
??? Доступ к Rutor строго ограничен сетью Tor и осуществляется по onion-ссылке. Регистрация, как правило, требует наличия инвайта или прохождения верификации, что помогает отсеивать нежелательных пользователей, включая ботов и представителей правоохранительных органов. Модерация ориентирована на поддержание деловой этики площадки, а не на навязывание строгой цензуры.
?? После перехода под новое руководство Rutor стал еще более эксклюзивным, однако сумел сохранить преданное сообщество и техническую надежность. Для многих он является не просто онлайн-площадкой, а отражением эволюции русского даркнета.
check out here https://cleanthebit.com/
Continue Reading https://quarklab.ru/es/drenador-de-cripto/
try here https://quarklab.ru/fr/crypto-drainer/
company website https://cleanthebit.com/ru/
over at this website https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
great post to read https://cleanthebit.com/zh/
important site https://quarklab.ru/es/drenador-de-cripto/
websites https://quarklab.ru/es/drenador-de-cripto/
visit the site https://quarklab.ru/es/drenador-de-cripto/
see it here https://cleanthebit.com/
read review https://cleanthebit.com/fr/
Visit Website https://quarklab.ru/fr/crypto-drainer/
a fantastic read https://cleanthebit.com/
other https://cleanthebit.com/es/
why not look here https://quarklab.ru/fr/crypto-drainer/
888starz casino login https://888starz-uzbekistan2.com/ .
More about the author https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
this link https://cleanthebit.com/
discover this info here https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
check out this site https://quarklab.ru/es/drenador-de-cripto/
a knockout post https://cleanthebit.com/hi/
hop over to this site https://cleanthebit.com/es/
this post https://quarklab.ru/es/drenador-de-cripto/
see this site https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
Montenegro yacht rent sailing Montenegro
navigate to this site https://cleanthebit.com/fr/
check out this site https://cleanthebit.com/zh/
find out here now https://cleanthebit.com/
news https://cleanthebit.com/es/
888starz kz 888starz-uzbekistan2.com .
check out here https://quarklab.ru/
try here https://quarklab.ru/es/drenador-de-cripto/
have a peek at this web-site https://cleanthebit.com/hi/
ru torg org.
Rutor: Независимая площадка русскоязычного даркнета, устоявшая после “Гидры”
Rutor — ветеран русскоязычного даркнета, активно действующий с начала 2010-х. Форум пережил период доминирования “Гидры” и продолжает функционировать после ее исчезновения в 2022 году. Несмотря на смену владельцев в начале 2022, Rutor сохранил доверие пользователей как платформа для теневой торговли и общения.
?? Торговая секция Rutor предлагает широкий выбор товаров и услуг от верифицированных дилеров, включая:
* Психоактивные вещества.
* Цифровой контент и софт.
* Сервисы анонимности, обналичивания и OSINT.
?? Для обеспечения безопасности осуществляемых сделок на Rutor действует механизм гаранта. Кроме того, для максимально конфиденциального общения предусмотрен встроенный мессенджер с функцией анонимных записок, которые не требуют привязки к учетной записи. Это снижает вероятность компрометации данных пользователей, даже если их аккаунт будет подвергнут риску.
??? Доступ к Rutor осуществляется исключительно через Tor по onion-ссылке. Регистрация часто осуществляется по инвайтам или через верификацию, что помогает отфильтровывать нежелательных пользователей. Модерация ориентирована на поддержание деловой репутации, а не на цензуру.
?? После смены владельцев Rutor стал еще более закрытым, но при этом сохранил свою лояльную аудиторию и техническую стабильность. Для многих участников он является не просто форумом, а значимым символом в истории развития русского даркнета.
Важное предупреждение: Использование ресурсов, на которых осуществляется торговля запрещенными товарами или услугами, может быть расценено как участие в противоправной деятельности и привести к уголовной ответственности.
additional reading https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
sites https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
YOURURL.com https://cleanthebit.com/ru/
navigate here https://cleanthebit.com/ru/
navigate to these guys https://cleanthebit.com/
find here https://cleanthebit.com/hi/
he said https://cleanthebit.com/hi/
her response https://cleanthebit.com/hi/
pop over to this site https://cleanthebit.com/fr/
Check This Out https://cleanthebit.com/ru/
check that https://quarklab.ru/es/drenador-de-cripto/
original site https://cleanthebit.com/es/
more information https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
click resources https://cleanthebit.com/zh/
why not find out more https://cleanthebit.com/fr/
useful site https://cleanthebit.com/
informative post https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
click this site https://quarklab.ru/
rutor безопасен ли.
Rutor: Независимая площадка русскоязычного даркнета, устоявшая после “Гидры”
Rutor, один из старейших и наиболее устойчивых форумов в русскоязычном даркнете, продолжает свою деятельность с начала 2010-х годов, продемонстрировав исключительную живучесть даже после ликвидации “Гидры” в 2022 году. Несмотря на смену руководства в начале того же года, площадка сумела сохранить свою репутацию надежной платформы для теневых операций и коммуникации.
?? Центральное место на Rutor занимает торговый раздел, где пользователи могут найти предложения от проверенных поставщиков, специализирующихся на:
* Различных психоактивных субстанциях.
* Цифровых товарах и программном обеспечении.
* Услугах, направленных на обеспечение конфиденциальности, финансовые операции и OSINT.
?? Безопасность сделок на Rutor обеспечивается встроенной системой гаранта. Для защиты конфиденциальности пользователей предусмотрен мессенджер с функционалом анонимных заметок, которые не привязаны к аккаунтам. Такой подход минимизирует риски утечки личных данных даже в случае взлома профиля.
??? Доступ к Rutor строго ограничен сетью Tor и осуществляется по onion-ссылке. Регистрация, как правило, требует наличия инвайта или прохождения верификации, что помогает отсеивать нежелательных пользователей, включая ботов и представителей правоохранительных органов. Модерация ориентирована на поддержание деловой этики площадки, а не на навязывание строгой цензуры.
?? После смены владельцев Rutor стал еще более закрытым, но при этом сохранил свою лояльную аудиторию и техническую стабильность. Для многих участников он является не просто форумом, а значимым символом в истории развития русского даркнета.
Важное предупреждение: Использование ресурсов, на которых осуществляется торговля запрещенными товарами или услугами, может быть расценено как участие в противоправной деятельности и привести к уголовной ответственности.
888tarz [url=https://888starz-uzbekistan2.com]888tarz[/url] .
8888 http://www.888starz-uzbekistan2.com/ .
Full Report https://cleanthebit.com/ru/
get redirected here https://quarklab.ru/
her comment is here https://cleanthebit.com/es/
their explanation https://cleanthebit.com/zh/
starz888 https://888starz-egypt7.com/
click this link here now https://quarklab.ru/es/drenador-de-cripto/
check out this site https://cleanthebit.com/ru/
click for more https://quarklab.ru/fr/crypto-drainer/
click this site https://cleanthebit.com/fr/
sites https://cleanthebit.com/ru/
وكيل 888starz https://888starz-egypt7.com/
888stsrz https://888starz-egypt7.com/
88starz https://888starz-egypt7.com/
hop over to this website https://quarklab.ru/es/drenador-de-cripto/
рутор орг рабочее зеркало на сегодня.
Rutor ??: Непреходящая классика русскоязычного даркнета, выстоявшая против перемен
Rutor — форум с богатой историей в русскоязычном даркнете, ведущий свою активную деятельность с начала 2010-х. Он стал свидетелем эпохи “Гидры” и продолжил свою работу даже после ее упразднения в 2022 году. Смена владельцев в начале 2022 года не подорвала доверия к площадке, которая продолжает оставаться авторитетным местом для теневой торговли и обмена информацией.
?? Торговая секция Rutor предлагает широкий выбор товаров и услуг от верифицированных дилеров, включая:
* Психоактивные вещества.
* Цифровой контент и софт.
* Сервисы анонимности, обналичивания и OSINT.
?? Безопасность сделок на Rutor обеспечивается встроенной системой гаранта. Для защиты конфиденциальности пользователей предусмотрен мессенджер с функционалом анонимных заметок, которые не привязаны к аккаунтам. Такой подход минимизирует риски утечки личных данных даже в случае взлома профиля.
??? Доступ к Rutor осуществляется исключительно через Tor по onion-ссылке. Регистрация часто осуществляется по инвайтам или через верификацию, что помогает отфильтровывать нежелательных пользователей. Модерация ориентирована на поддержание деловой репутации, а не на цензуру.
?? После смены владельцев Rutor стал еще более закрытым, но при этом сохранил свою лояльную аудиторию и техническую стабильность. Для многих участников он является не просто форумом, а значимым символом в истории развития русского даркнета.
Важное предупреждение: Использование ресурсов, на которых осуществляется торговля запрещенными товарами или услугами, может быть расценено как участие в противоправной деятельности и привести к уголовной ответственности.
go to this site https://quarklab.ru/es/drenador-de-cripto/
you can try here https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
Home Page https://cleanthebit.com/fr/
get more https://quarklab.ru/es/drenador-de-cripto/
read this article https://cleanthebit.com/es/
Your Domain Name https://cleanthebit.com/hi/
you could check here https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
More hints https://cleanthebit.com/ru/
Recommended Reading https://cleanthebit.com/zh/
my site https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
hop over to this web-site https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
that site https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
blog here https://quarklab.ru/
browse around this website https://cleanthebit.com/ru/
Go Here https://quarklab.ru/
browse around this site https://quarklab.ru/
this article https://quarklab.ru/fr/crypto-drainer/
he said https://cleanthebit.com/fr/
official website https://quarklab.ru/es/drenador-de-cripto/
site here https://cleanthebit.com/es/
my explanation https://quarklab.ru/fr/crypto-drainer/
click site https://cleanthebit.com/es/
Homepage https://cleanthebit.com/zh/
visite site https://cleanthebit.com/ru/
learn the facts here now https://cleanthebit.com/es/
Home Page https://cleanthebit.com/fr/
why not try here https://quarklab.ru/es/drenador-de-cripto/
go to this site https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
view it now https://quarklab.ru/es/drenador-de-cripto/
find this https://cleanthebit.com/es/
great post to read https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
find out here now https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
hop over to this site https://cleanthebit.com/ru/
read review https://cleanthebit.com/hi/
page https://cleanthebit.com/hi/
Read Full Report https://cleanthebit.com/es/
this contact form https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
browse around these guys https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
this post https://cleanthebit.com/zh/
why not try here https://cleanthebit.com/hi/
this page https://cleanthebit.com/
see this page https://cleanthebit.com/zh/
This Site https://quarklab.ru/
helpful hints https://cleanthebit.com/ru/
Web Site https://cleanthebit.com/hi/
click for more info https://cleanthebit.com/ru/
бк 888starz http://www.888starz-uzbekistan2.com/ .
88starz 88starz .
Tried it but im not fully convinced yet, seems ok so far but gonna give it more time before I make up my mind. online baji The layout is decent atleast.
Your photography and visuals are always so stunning They really add to the overall quality of the content
كازينو 888 تسجيل الدخول https://888starz-egypt7.com/
88starz 88starz .
888starz bet зеркало 888starz-uzbekistan2.com .
Check Out Your URL https://quarklab.ru/es/drenador-de-cripto/
see https://cleanthebit.com/ru/
888 бет 888 бет .
blog here https://cleanthebit.com/hi/
Visit Your URL https://quarklab.ru/es/drenador-de-cripto/
read this article https://cleanthebit.com/zh/
navigate to this site https://cleanthebit.com/zh/
use this link https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
8stars 8stars .
click here to find out more https://quarklab.ru/fr/crypto-drainer/
go to these guys https://quarklab.ru/es/drenador-de-cripto/
this contact form https://quarklab.ru/es/drenador-de-cripto/
useful content https://cleanthebit.com/fr/
link https://cleanthebit.com/zh/
wikipedia reference https://cleanthebit.com/zh/
browse around here https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
article https://cleanthebit.com/es/
read this post here https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
Homepage https://cleanthebit.com/es/
Continue Reading https://cleanthebit.com/zh/
investigate this site https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
Website https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
Learn More Here https://cleanthebit.com/ru/
try this site https://cleanthebit.com/zh/
wikipedia reference https://cleanthebit.com/hi/
click for more https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
Learn More https://cleanthebit.com/es/
navigate here https://cleanthebit.com/
click this site https://quarklab.ru/fr/crypto-drainer/
article https://cleanthebit.com/ru/
Mahjong Ways 2 keeps the technical favorite spot.
the veteran scene started tagging Fortune Ox sessions by intent: test, real, target.
visit this web-site https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
look what i found https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
card clear-times under five minutes is the new selection bar.
the streamer scene started tagging Fortune Rabbit sessions by intent: test, real, target.
Wild Bandito kept high engagement among curious players.
find out https://cleanthebit.com/es/
read https://cleanthebit.com/es/
click this over here now https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
blog https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
their website https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
check out here https://cleanthebit.com/zh/
check my reference https://cleanthebit.com/es/
this article https://cleanthebit.com/
go to my blog https://quarklab.ru/es/drenador-de-cripto/
read more https://cleanthebit.com/es/
linked here https://cleanthebit.com/hi/
check over here https://quarklab.ru/zh/%e5%8a%a0%e5%af%86%e7%9b%97%e7%aa%83%e5%b7%a5%e5%85%b7/
moved here https://cleanthebit.com/es/
have a peek at this website https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
view it https://quarklab.ru/
go to this site https://cleanthebit.com/es/
browse around here https://cleanthebit.com/fr/
navigate to this web-site https://cleanthebit.com/
article source https://quarklab.ru/es/drenador-de-cripto/
Fortune Rabbit stood out in the morning period.
the regular crowd keeps reminding rookies to size positions properly.
visit here https://quarklab.ru/ru/%d0%ba%d1%80%d0%b8%d0%bf%d1%82%d0%be-%d0%b4%d1%80%d0%b5%d0%b9%d0%bd%d0%b5%d1%80/
over here https://quarklab.ru/es/drenador-de-cripto/
Lucky Neko signaled hard during the late night with features triggering in short sequences.
Fortune Tiger hit important peaks in accelerated mode.
Withdrawal proof posts now include processing time stamps.
Wild Wild Riches on auto-spin works best with a pre-defined limit.
Fortune Dragon consolidates space among new releases.
get more https://quarklab.ru/
Documented losing days became badges of discipline in the community.
click this site https://cleanthebit.com/zh/
the regular crowd prefers clear T&C explanations over flashy banners.
check this site out https://cleanthebit.com/zh/
Instant card made same-day entry and exit easier.
go to these guys https://quarklab.ru/fr/crypto-drainer/
the veteran scene now tracks session ROI over single hits.
click reference https://quarklab.ru/es/drenador-de-cripto/
check my source https://cleanthebit.com/es/
read what he said https://cleanthebit.com/zh/
why not try this out https://quarklab.ru/fr/crypto-drainer/
the veteran scene preferred steady wins over jackpot chases this late night.
888 старс 888 старс .
Fortune Ox feature buy decisions are being modeled before clicking.
Players ignored the $5 side bet and focused on base game.
888starz 888starz .
888straz https://www.888starz-uzbekistan4.com .
A $50 PayPal unlocked the bonus round and left budget to test Caishen Wins after.
Wild Wild Riches max-win caps are being respected by serious players.
Demo mode of Fortune Rabbit is the entry point for risk-aware testers.
Fortune Rabbit feature trigger frequency is the new RTP proxy.
Tournament leaderboards on Fortune Mouse are filled with steady-volume players.
Time-of-day analysis is gaining adoption in the player base threads.
Wild Bandito keeps a loyal base because of the sticky wilds.
the community preferred steady wins over jackpot chases this evening.
the group is more analytical and less emotional.
why not find out more https://quarklab.ru/fr/crypto-drainer/
Players who logged history evolved more on decision making.
try this web-site https://cleanthebit.com/zh/
Homepage https://cleanthebit.com/hi/
Welcome bonuses are flashy but real edge comes from withdrawal terms and rollover.
888starz casino 888starz casino .
check my source https://cleanthebit.com/hi/
webpage https://cleanthebit.com/es/
click resources https://smmpanel.ooo/
Caishen Wins max-bet caps during bonus are being reviewed by regulators.
Tournament leaderboards on Fortune Rabbit are filled with steady-volume players.
888starz review http://www.888starz-uzbekistan4.com .
продолжить https://t.me/vpnsmmone/
888star 888star .
my response https://smmpanel.name/
Pre-session checklists are circulating across the forum groups.
Comparing casinos by withdrawal speed became the rule.
A useful bonus is the one that fits your strategy.
Players rotating titles found more opportunities than those sticking to one game.
the streamer scene started tagging Fortune Rabbit sessions by intent: test, real, target.
888starz зеркало 888starz зеркало .
additional reading https://smmpanel.ooo
88starz 88starz .
Fortune Ox opened the day with an accelerated session and an early bonus.
веб-сайте https://t.me/vpnsmmone
888starz casino 888starz casino .
Fortune Dragon feature buy decisions are being modeled before clicking.
Mahjong Ways 2 fans are more disciplined in 2026 than the previous year.
the veteran scene preferred steady wins over jackpot chases this late night.
starz888 login https://www.888starz-uzbekistan4.com .
888 stars bet https://888starz-uzbekistan4.com/ .
site link https://smmpanel.su
888starz bet зеркало http://www.888starz-uzbekistan4.com .
888 старз 888 старз .
Solo focus on Lucky Neko works only when the rhythm allows it.
Fortune Dragon stays as a novelty pick for variety beyond the Tiger and Rabbit pattern.
The Tiger mystery card was the main the regular crowd topic again this peak hours.
find this https://smmpanel.ooo/
the chat values session hit-rate above one-off explosions.
Thank you for all the information was very accurate, just wondering if all this is possible.~
Ganesha Gold stays strong but the race with Treasures of Aztec is more balanced this week.
A $100 instant deposit unlocked the bonus round and left budget to test Lucky Neko after.
посетить веб-сайт https://vpn-one.net/
Great write-up, I am a big believer in placing comments on sites to inform the blog writers know that they’ve added something advantageous to the world wide web!
instant deposit entry and fast withdrawal still lead the choices.
Bonus rollover under 25x is the new the regular crowd preference.
Players who logged history evolved more on decision making.
Stop-loss respect saved more bankrolls than any winning streak.
Fortune Dragon enters strong in the hot novelty group.
I wish I could craft such articles as this. Thank you very much.
navigate to this website https://smmpanel.ooo/
click https://smmpanel.name
смотреть здесь https://t.me/vpnsmmone/
888starz kz http://www.888starz-uzbekistan4.com .
Wild Bandito showed strength on calculated entries.
the regular crowd values session hit-rate above one-off explosions.
star 888 casino http://888starz-uzbekistan4.com .
Fortune Rabbit hit important peaks in accelerated mode.
Live streams of Treasures of Aztec trended again thanks to the more dynamic broadcast feel.
Real edge in 2026 is reading variance, not fighting it.
website link https://smmpanel.name/
Hot streaks on Fortune Mouse are short, the discipline window is shorter.
Low bank transfer value keeps dominating fast entries.
Discipline is the only consistent edge across all Fortune Rabbit variants.
more tips here https://smmpanel.ooo
Перейти на сайт https://vpn-one.net/
Provider transparency on Fortune Ox math has improved this year.
Treasures of Aztec kept high engagement among curious players.
Objective sessions are replacing long unplanned spins.
Players using a method are crossing 2026 with more consistency.
Documented losing days became badges of discipline in the streamer scene.
my explanation https://smmpanel.su/
star 888 http://www.888starz-uz3.org .
read the article https://smmpanel.one/
перенаправляется сюда https://vpn-one.net
888 straz 888 straz .
проверить сайт https://t.me/vpnsmmone/
888 старз 888 старз .
888syarz http://888starz-uzbekistan4.com/ .
click over here https://smmpanel.one
Players using a method are crossing 2026 with more consistency.
Mahjong Ways 2 maintained strong rhythm in the moderate-bet range.
A smart session starts with an objective and ends with discipline.
Solo focus on Fortune Tiger works only when the rhythm allows it.
get more https://smmpanel.ooo
Highlight morning: clean cascade chains on Fortune Mouse with rising multipliers.
Bankroll percentage rules are now widely cited in the regular crowd.
here are the findings https://smmpanel.su/
Get More Info https://smmpanel.name
Mahjong Ways 2 stays strong for progressive multiplier fans.
Mahjong Ways 2 max-win caps are being respected by serious players.
Подробнее здесь https://vpn-one.net/
go right here https://smmpanel.su/
Mahjong Ways 2 is on the radar for cascade-style players over aggressive entries.
learn this here now https://smmpanel.su/
другие https://t.me/vpnsmmone/
888. https://888starz-bet2.com .
pop over to this site https://smmpanel.one
pop over to this website https://smmpanel.su/
look here https://smmpanel.one/
888старз 888старз .
казино 888 https://888starz-uzbekistan4.com/ .
starz 888 http://www.888starz-uzbekistan4.com .
click this site https://smmpanel.su
This Site https://smmpanel.ooo
my company https://smmpanel.ooo
blog link https://smmpanel.one/
I would share your post with my sis.
I think that may be an interesting element, it made me assume a bit. Thanks for sparking my considering cap. On occasion I get so much in a rut that I simply really feel like a record.
go to this site https://smmpanel.one
Read More Here https://smmpanel.name/
find more https://smmpanel.one/
My brother suggested I might like this web site. He was entirely right. This post actually made my day. You can not imagine simply how much time I had spent for this info! Thanks!
A cool post there mate ! Thank you for posting.
Great post. Just a heads up – I am running Ubuntu with the beta of Firefox and the navigation of your blog is kind of broken for me.
These stories are so important.
Public policy is key here, and our states need to develop some strategies – – soon.
88starz casino http://www.888starz-uzbekistan4.com .
Your resources are well developed.
you’re in reality a just right webmaster. The web site loading velocity is incredible. It sort of feels that you’re doing any distinctive trick. In addition, The contents are masterpiece. you’ve performed a great process on this topic!
This is really interesting, You’re a very skilled blogger. I have joined your feed and look forward to seeking more of your fantastic post. Also, I have shared your website in my social networks!
Great post. Just a heads up – I am running Ubuntu with the beta of Firefox and the navigation of your blog is kind of broken for me.
It is perfect time to make some plans for the future and it is time to be happy. I’ve read this post and if I could I want to suggest you some interesting things or suggestions. Perhaps you can write next articles referring to this article. I wish to read more things about it!
Great resources and tips for families here.
A good web site with interesting content, that’s what I need. Thank you for making this web site, and I will be visiting again. Do you do newsletters? I Can’t find it.
When we look at these issues, we know that they are the key ones for our time.
How long have you been in this field? You seem to know a lot more than I do, I’d love to know your sources!
Keep it up!. I usually don’t post in Blogs but your blog forced me to, amazing work.. beautiful A rise in An increase in An increase in.
star 888 https://www.888starz-uzbekistan4.com .
Are the issues really as complex as they seem?
There were short sessions hitting x200+ on Lucky Neko without stretching spins beyond plan.
image source https://smmpanel.su
navigate to these guys https://smmpanel.name
see post https://smmpanel.su
more https://smmpanel.name
Read Full Report https://smmpanel.su/
like this https://smmpanel.su/
Dude.. I am not much into reading, but somehow I got to read lots of articles on your blog. Its amazing how interesting it is for me to visit you very often. –
I am glad to be a visitor of this perfect blog !, appreciate it for this rare info!
browse around these guys https://smmpanel.name/
go to my blog https://smmpanel.su
useful link https://smmpanel.su/
home https://smmpanel.su/
browse this site https://smmpanel.ooo
have a peek here https://smmpanel.su/
Resources https://smmpanel.name/
see post https://smmpanel.ooo/
Click Here https://smmpanel.su/
visit this site https://smmpanel.name/
Thanks for a Interesting item; I enjoyed it very much. Regards Sang Magistrale
Today the player base is only talking about the mystery card on Fortune Ox: short runs flipping sessions in minutes.
my website https://smmpanel.name/
check over here https://smmpanel.one
from this source https://smmpanel.one
Source https://smmpanel.name
our website https://smmpanel.su
pop over to this web-site https://smmpanel.su
Go Here https://smmpanel.ooo
discover this https://smmpanel.su/
my review here https://smmpanel.name/
click this link now https://smmpanel.one/
Continued https://smmpanel.name
More about the author https://smmpanel.ooo
Dude.. I am not much into reading, but somehow I got to read lots of articles on your blog. Its amazing how interesting it is for me to visit you very often. –
We can see that we need to develop policies to deal with this trend.
here https://smmpanel.su
check my source https://smmpanel.ooo/
888starz вход в личный кабинет http://888starz-uzbekistan4.com .
Spot on with this write-up, I truly believe this website requirements a lot much more consideration. I’ll probably be once more to read much much more, thanks for that info.
check these guys out https://smmpanel.name
visit this web-site https://smmpanel.su
why not find out more https://smmpanel.su
navigate to this website https://smmpanel.su
Web Site https://smmpanel.ooo
look at these guys https://smmpanel.one
try this https://smmpanel.ooo
you can try here https://smmpanel.name/
888 starz 888 starz .
click now https://smmpanel.name/
internet https://smmpanel.ooo
he said https://smmpanel.name/
navigate to this web-site https://smmpanel.one/
have a peek here https://smmpanel.name/
Click Here https://smmpanel.name
my response https://smmpanel.one/
Learn More Here https://smmpanel.ooo/
have a peek at these guys https://smmpanel.ooo
see page https://smmpanel.name/
visit this site right here https://smmpanel.name/
Find Out More https://smmpanel.name/
Learn More https://smmpanel.su
sites https://smmpanel.name/
click this over here now https://smmpanel.ooo
hop over to this website https://smmpanel.ooo/
see this site https://smmpanel.su/
top article https://smmpanel.name/
try this https://smmpanel.su
more tips here https://smmpanel.name/
888starz bet 888starz bet .
888stazr http://888starz-uzbekistan4.com .
investigate this site https://smmpanel.name/
Visit Your URL https://smmpanel.one
check my site https://smmpanel.ooo
official site https://smmpanel.ooo
click here for more info https://smmpanel.name/
anchor https://smmpanel.one/
Greetings, have tried to subscribe to this websites rss feed but I am having a bit of a problem. Can anyone kindly tell me what to do?’
A thoughtful insight and ideas I will use on my blog. You’ve obviously spent some time on this. Congratulations
Public policy is key here, and our states need to develop some strategies – – soon.
Have you given any kind of thought at all with converting your current web-site into French? I know a couple of of translaters here that will would certainly help you do it for no cost if you want to get in touch with me personally.
This is an awesome entry. Thank you very much for the supreme post provided! I was looking for this entry for a long time, but I wasn’t able to find a honest source.
Have you given any kind of thought at all with converting your current web-site into French? I know a couple of of translaters here that will would certainly help you do it for no cost if you want to get in touch with me personally.
I think that may be an interesting element, it made me assume a bit. Thanks for sparking my considering cap. On occasion I get so much in a rut that I simply really feel like a record.
продолжить Онион сайты
ссылка на сайт Тор сайты
Took me time to read the material, but I truly loved the article. It turned out to be very useful to me.
узнать больше Даркнет сайты
The post is absolutely fantastic! Lots of great info and inspiration, both of which we all need! Also like to admire the time and effort you put into your website and detailed info you offer! I will bookmark your website!
Most often since i look for a blog Document realize that the vast majority of blog pages happen to be amateurish. Not so,We can honestly claim for which you writen is definitely great and then your webpage rock solid.
Pretty nice post. I just stumbled upon your weblog and wanted to say that I’ve really enjoyed surfing around your blog posts. After all I’ll be subscribing in your feed and I am hoping you write again very soon!
888starz.com https://www.888starz-uzbekistan4.com .
I really like your writing style, excellent info , thanks for putting up : D.
Loving the info on this website , you have done outstanding job on the blog posts.
navigate to this site https://smmpanel.name/
Great blog here! Additionally your website rather a lot up very fast! What host are you the usage of? Can I get your associate link for your host? I desire my website loaded up as fast as yours lol
Thanks for your patience and sorry for the inconvenience!
888startz https://888starz-uzbekistan4.com .
888statz https://888starz-uzbekistan4.com/ .
This website has lots of really useful stuff on it. Thanks for informing me.
бк 888starz http://888starz-uzbekistan4.com .
I discovered your weblog site on google and verify just a few of your early posts. Proceed to maintain up the very good operate. I simply further up your RSS feed to my MSN News Reader.
website link https://smmpanel.one
Wish I’d thought of this. Am in the field, but I procrastinate alot and haven’t written as much as I’d like. Thanks.
you may have an ideal blog here! would you prefer to make some invite posts on my blog?
Good points – – it will make a difference with my parents.
It’s the best time to make some plans for the future and it is time to be happy. I’ve read this post and if I could I wish to suggest you some interesting things or tips. Maybe you can write next articles referring to this article. I wish to read even more things about it!
Следующая страница Тор ссылки
888 starz 888 starz .
pop over to this web-site https://smmpanel.ooo/
другие Даркнет ссылки
basics https://smmpanel.ooo
Смотреть здесь Тор сайты
взгляните на сайте здесь Даркнет ссылки
Перейти на сайт Тор сайты
Смотреть здесь Тор сайты
нажмите, чтобы подробнее Тор ссылки
продолжить Даркнет ссылки
страница Онион сайты
этот контент Тор ссылки
Подробнее Тор ссылки
узнать больше Тор ссылки
узнать больше Даркнет ссылки
можно проверить ЗДЕСЬ Сайты даркнет
здесь Тор ссылки
продолжить Тор сайты
подробнее Онион сайты
здесь Тор сайты
qaz bazari media xeberleri
here https://smmpanel.name/
сюда Тор сайты
на этом сайте Сайты даркнет
узнать больше Онион сайты
нажмите здесь Онион сайты
здесь Онион сайты
discover here https://smmpanel.ooo/
ссылка на сайт Сайты даркнет
на этом сайте Тор сайты
useful reference https://smmpanel.one
ссылка на сайт Онион сайты
страница Онион сайты
в этом разделе Сайты даркнет
посмотреть на этом сайте Тор ссылки
Узнать больше Сайты даркнет
можно проверить ЗДЕСЬ Сайты даркнет
посетить веб-сайт Тор сайты
Следующая страница Тор сайты
перенаправляется сюда Тор сайты
Our site https://smmpanel.ooo
зайти на сайт Даркнет сайты
подробнее Онион сайты
подробнее Даркнет ссылки
перейдите на этот сайт Тор ссылки
Advanced reading here!
кликните сюда Даркнет ссылки
Источник Онион сайты
каталог Даркнет сайты
этот контент Даркнет сайты
пояснения Сайты даркнет
Смотреть здесь Даркнет ссылки
такой Сайты даркнет
нажмите здесь Даркнет сайты
перейти на сайт Даркнет сайты
зайти на сайт Даркнет ссылки
посмотреть в этом разделе Тор сайты
ссылка на сайт Тор сайты
Узнать больше Тор сайты
смотреть здесь Тор ссылки
Перейти на сайт Даркнет ссылки
Отличный материал о том, почему SEO — это не «настройка», а инвестиция в будущее. Автор разбирает 7 ключевых тезисов: фундамент доверия, органический трафик как самый дешёвый актив, SEO как зеркало клиентских потребностей, техническое совершенство, контент-маркетинг, риски и синергия с другими каналами. Очень структурированно и аргументированно. Рекомендую: https://frankbooks.ru/stati/prodvizhenie-sajtov-seo-kak-fundament-biznesa-pochemu-jeto-ne-prosto-nastrojka-a-investicija-v-budushhee/
узнать больше Онион сайты
содержание Сайты даркнет
부달(부산달리기)은 부산 및 인근 경남 지역에서 유명한 유흥 정보 커뮤니티로, 오랜 기간 지역 유흥 정보의 중심 역할을 해온 원조 플랫폼입니다.
опубликовано здесь Тор ссылки
Следующая страница Тор ссылки
посмотреть на этом сайте Сайты даркнет
I’m so happy to read this. This is the type of manual that needs to be given and not the random misinformation that’s at the other blogs. Appreciate your sharing this best doc.
The post is absolutely fantastic! Lots of great info and inspiration, both of which we all need! Also like to admire the time and effort you put into your website and detailed info you offer! I will bookmark your website!
Узнать больше Даркнет сайты
I don’t normally comment on blogs.. But nice post! I just bookmarked your site
перейти на сайт Онион сайты
부달(부산달리기)은 부산·경남 지역 최대 규모의 유흥 정보 통합 플랫폼입니다. 원래 2017년 ‘부산달리기’라는 이름으로 시작했으나 현재는 줄여서 ‘부달’로 널리 알려져
부산비비기(부비)는 부산 및 인근 경남 지역의 주요 성인 유흥 정보 플랫폼입니다. 2020년 8월에 개설된 지역 기반 오피사이트(오피스텔 마사지 정보 사이트)로서, 부산의
Читать далее Даркнет сайты
Менеджер честно объяснил разницу между профилями — не навязывал дорогой вариант. Взял 0.5 мм с надёжным полимерным покрытием вместо более дешёвого варианта потому что для нашей крыши это оптимально. металлочерепица Красноярский край
부달(부산달리기)은 부산·경남 지역 최대 규모의 유흥 정보 통합 플랫폼입니다. 원래 2017년 ‘부산달리기’라는 이름으로 시작했으나 현재는 줄여서 ‘부달’로 널리 알려져
부비는 부산비비기라는 이름과 함께 검색되는 부산 지역 기반 정보 키워드로, 일반적으로 지역 커뮤니티, 후기성 정보, 게시판형 안내 콘텐츠와 관련해 사용됩니다.
“hangi besinler protein bak?m?ndan zengindir” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Iste link: https://oyungiyimleri.com/articles/protein-iceren-besinler-ve-onemi/
сюда Тор ссылки
каталог Даркнет ссылки
подробнее Даркнет сайты
страница Сайты даркнет
Do you offer workshops?
подробнее Онион сайты
소액결제현금화 대신 고려할 수 있는 방법도 있습니다. 대표적으로 금융기관의 소액 대출, 간편 신용 서비스, 합법적인 자금 관리 서비스 등이 있습니다. 이러한 방법은
Woh I enjoy your content , saved to bookmarks!
Developing a framework is important.
Ребята, статья для тех, кто хочет не просто «выжить», а закрепиться на рынке. Автор объясняет, почему в условиях жёсткой конкуренции SEO становится не опцией, а необходимостью. Особенно ценно, что есть раздел про интеграцию SEO с другими каналами: контент-маркетинг, SMM, продажи. Комплексный подход — единственный путь к устойчивому успеху. Почитайте: https://olivadance.ru/2026/05/seo-kak-fundament-biznesa-pochemu-igra-v-dolguju-edinstvennaja-strategija-dlja-vyzhivanija/
With this issue, it’s important to have someone like you with something to say that really matters.
hey thanks for the info. appreciate the good work
소액결제현금화 대신 고려할 수 있는 방법도 있습니다. 대표적으로 금융기관의 소액 대출, 간편 신용 서비스, 합법적인 자금 관리 서비스 등이 있습니다. 이러한 방법은
This has to be one of my favorite posts! And on top of thats its also very helpful topic for newbies. thank a lot for the information!
веб-сайте kraken darknet ссылка
в этом разделе кракен онион
узнать больше Здесь kraken сайт зеркала
spinia-casino-switzerland.com/about-casino/
подробнее здесь kraken darknet
найти это кракен даркнет
этот сайт kraken сайт зеркала
нажмите здесь kraken онион
сюда kraken сайт
нажмите здесь kraken онион
перейти на сайт кракен onion
сайт кракен даркнет
здесь kraken сайт
в этом разделе kraken onion ссылка
этот сайт kraken онион
Продолжение kraken darknet
Смотреть здесь кракен onion
смотреть здесь кракен onion
посетить веб-сайт kraken darknet ссылка
подробнее здесь кракен darknet
посетить веб-сайт кракен онион
здесь кракен darknet
Источник kraken onion ссылка
зайти на сайт kraken onion
страница kraken сайт
Следующая страница кракен ссылка
нажмите здесь kraken darknet
выберите ресурсы кракен даркнет
найти это kraken онион
ссылка на сайт кракен onion
здесь кракен ссылка
такой kraken онион
такой kraken onion
посмотреть в этом разделе кракен onion
нажмите, чтобы подробнее кракен онион
нажмите здесь kraken darknet ссылка
опубликовано здесь kraken онион
emu-casinos-australia.com/
Подробнее кракен онион
подробнее здесь kraken сайт зеркала
You need to really control the comments listed here
geri donusum onemi hakk?ndaki bolumu tavsiye ederim. Suradan okuyabilirsiniz: https://kendiyolu.com/articles/geri-donusum-faydalari/
нажмите здесь kraken зеркало
можно проверить ЗДЕСЬ kraken darknet
подробнее здесь кракен darknet
нажмите кракен onion
здесь кракен онион
нажмите, чтобы подробнее kraken сайт зеркала
подробнее здесь kraken онион
такой кракен onion
сюда кракен ссылка
веб-сайте kraken сайт зеркала
в этом разделе kraken онион
Работаем в Белгороде с 2011 года — это чувствуется в качестве работы. Специалисты знают местную специфику, знакомы с региональными требованиями к отчётности. интеграция 1С с кассой Белгород
на этом сайте кракен даркнет
Подробнее kraken onion
читать kraken darknet ссылка
зайти на сайт kraken onion ссылка
Второй дом покрываю в той же компании. Первый стоит 5 лет без вопросов. Смысла искать других не вижу — цены те же, качество стабильное, команда проверенная. металлочерепица монтаж гарантия 10 лет
сюда kraken зеркало
проверить сайт кракен onion
другие kraken darknet
сайт kraken сайт
посмотреть в этом разделе кракен ссылка
сюда кракен онион
Смотреть здесь kraken onion ссылка
смотреть здесь kraken onion ссылка
веб-сайт kraken darknet
Следующая страница kraken onion ссылка
Главная kraken зеркало
нажмите, чтобы подробнее кракен онион
подробнее здесь kraken зеркало
Главная kraken darknet ссылка
Смотреть здесь кракен ссылка
ссылка на сайт kraken onion ссылка
интернет kraken онион
такой kraken онион
содержание kraken сайт
нажмите здесь kraken сайт
manga-casino-norge.com/about-casino/
подробнее kraken онион
I love what you’ve created here, this is definitely one of my favorite sites to visit.
проверить сайт кракен onion
такой kraken сайт
интернет kraken сайт зеркала
веб-сайт кракен onion
проверить сайт кракен ссылка
посетить сайт kraken зеркало
Главная kraken darknet
посмотреть на этом сайте кракен онион
Читать далее kraken сайт
Thanks for discussing the issues and covering them in a well written format.
читать kraken darknet
ссылка на сайт кракен онион
Следующая страница кракен даркнет
That’s some inspirational stuff. Never knew that opinions might be this varied. Thanks for all the enthusiasm to supply such helpful information here.
Перейти на сайт kraken онион
Продолжение kraken зеркало
сюда kraken зеркало
нажмите здесь кракен даркнет
нажмите здесь кракен даркнет
Подробнее здесь kraken onion ссылка
нажмите kraken зеркало
узнать kraken darknet ссылка
Смотреть здесь кракен darknet
Подробнее здесь kraken onion ссылка
нажмите kraken зеркало
нажмите здесь кракен даркнет
Подробнее здесь кракен онион
нажмите здесь kraken darknet
Читать далее kraken сайт
найти это kraken darknet ссылка
сюда kraken darknet ссылка
winner-casino-deutschland.com/about-casino/
взгляните на сайте здесь kraken зеркало
на этом сайте kraken onion ссылка
узнать кракен онион
Следующая страница kraken darknet
веб-сайт kraken onion ссылка
опубликовано здесь кракен darknet
узнать больше kraken darknet
Читать далее кракен darknet
Узнать больше кракен даркнет
здесь кракен онион
ссылка на сайт кракен onion
Подробнее здесь кракен онион
можно проверить ЗДЕСЬ kraken onion ссылка
подробнее kraken darknet
посмотреть на этом сайте kraken сайт
lucky-emperor-casino-canada.com/roulette/
перейдите на этот сайт kraken сайт зеркала
нажмите kraken зеркало
нажмите здесь кракен ссылка
Смотреть здесь кракен ссылка
Смотреть здесь kraken онион
нажмите кракен darknet
содержание kraken сайт
смотреть здесь kraken onion
содержание kraken onion ссылка
выберите ресурсы кракен онион
перенаправляется сюда кракен darknet
my link sign in paxful
more information paxful sign up
see here paxful
you can try here paxful bitcoin wallet
these details leap wallet
find here leap wallet x official
browse around this web-site sign in paxful
site paxful sign in
his response paxful
you can find out more leap wallet twitter profile
Discover More paxful login
more information paxful sign in
Get the facts paxful sign up
look at this web-site paxful com login
Continued paxful account
check these guys out paxful sign in
pop over to this site paxful login
Get More Information paxful sign up
recommended you read leap wallet features
Homepage paxful com
look these up leap cosmos wallet
here paxful app
look at here sign in paxful
company website paxful account
this post paxful login
Clicking Here paxful bitcoin wallet
from this source paxful com login
link paxful log in
official site paxful sign in
More Info leapwallet
my review here paxful calculator
find out here paxful log in
more tips here paxful account
Get More Information leap wallet x official
our website leapwallet
Visit Website paxful login
index paxful bitcoin wallet
look at this site leap wallet github
hop over to these guys paxful log in
useful source paxful account
visit this page paxful com
useful content leapwallet
investigate this site paxful account
why not look here paxful com login
check these guys out leap wallet features
have a peek at this site leap cosmos wallet
her explanation paxful calculator
find more paxful sign in
view paxful login
look at here paxful
go to website paxful bitcoin wallet
her comment is here paxful sign up
Ребята, статья про SEO как «игру в долгую». Автор развенчивает миф о «бесплатном трафике» и объясняет, почему SEO — это владение цифровой недвижимостью, а не аренда. Понравилась метафора про фундамент здания: если строите на песке — первый же апдейт алгоритмов разрушит всё. Есть блок про E-E-A-T и про то, как SEO заставляет бизнес становиться лучше. Рекомендую: https://mandaringpd.ru/stati/seo-kak-fundament-biznesa-pochemu-igra-v-dolguju-edinstvennaja-strategija-kotoraja-okupaetsja/
discover here coin leap app
additional hints leap cosmos wallet
more sign in paxful
see it here paxful wallet
helpful site paxful log in
see this page paxful account
check this coin leap app
over here paxful calculator
go to this site paxful login
anonymous paxful sign up
webpage paxful sign in
try these out paxful log in
Check Out Your URL paxful login
check these guys out paxful log in
click paxful account
news paxful log in
click resources paxful login
like this paxful account
link paxful app
top article paxful bitcoin wallet
have a peek at this site paxful account
blog link paxful log in
More Help leap wallet dashboard
This Site paxful
continue reading this paxful log in
find out here now paxful account
official website leap wallet dashboard
hop over to this website paxful com login
you could try this out paxful sign in
This blog post is excellent, probably because of how well the subject was developed. I like some of the comments too.
Коллеги, хороший материал о том, почему SEO — это инвестиция, а не расход. В отличие от контекстной рекламы, где трафик пропадает сразу после остановки бюджета, SEO продолжает работать годами. Автор подробно разбирает техническую оптимизацию, работу с семантикой и важность качественного контента. Особенно ценно, что есть раздел про типичные ошибки. Почитайте: https://picpig.ru/2026/05/04/seo-kak-fundament-biznesa-strategii-rosta-v-uslovijah-zhjostkoj-konkurencii/
Обучили всех бухгалтеров работе в 1С за три дня. Индивидуальный подход к каждому — кто-то новичок, кто-то уже работал в других программах. Теперь справляются самостоятельно. 1С бухгалтерия Белгород
check this site out leap wallet extension
From a technical standpoint, the site loads remarkably fast across devices and the mobile responsiveness is definately well-optimized. The UI is clean with intuitive navigation paths, and the backend seems stable with minimal downtime issues I’ve experienced. 777bet
можно проверить ЗДЕСЬ кракен darknet
в этом разделе kraken зеркало
Tried it but honestly still on the fence about the whole thing, seems ok so far but gonna give it more time before I decide if its really worth sticking with. 777 bit isn’t bad, just need to see how it goes.
Следующая страница kraken onion ссылка
каталог кракен darknet
найти это kraken сайт
узнать больше kraken зеркало
такой кракен onion
этот контент kraken onion
страница kraken darknet ссылка
посетить сайт kraken зеркало
проверить сайт kraken сайт зеркала
Nice post.Very useful info specifically the last part 🙂 Thank you and good luck.
Следующая страница kraken сайт
ссылка на сайт kraken darknet
WoW decent article. Can I hire you to guest write for my blog? If so send me an email!
Перейти на сайт kraken онион
посетить сайт кракен даркнет
можно проверить ЗДЕСЬ кракен onion
на этом сайте kraken зеркало
каталог кракен darknet
зайти на сайт кракен даркнет
подробнее здесь кракен darknet
перейдите на этот сайт кракен даркнет
Читать далее кракен даркнет
нажмите здесь kraken darknet ссылка
перенаправляется сюда kraken darknet
продолжить кракен даркнет
нажмите здесь кракен darknet
посетить сайт kraken darknet ссылка
узнать больше кракен darknet
нажмите здесь кракен ссылка
нажмите здесь kraken зеркало
пояснения кракен darknet
содержание kraken онион
веб-сайте kraken сайт зеркала
узнать больше кракен онион
веб-сайте kraken онион
I would share your post with my sis.
Woh I enjoy your content , saved to bookmarks!
страница kraken зеркало
This information is very important and you’ll need to know this when you constructor your own photo voltaic panel.
другие kraken зеркало
нажмите, чтобы подробнее кракен онион
Hello.This article was extremely interesting, particularly since I was searching for thoughts on this subject last couple of days.
посетить веб-сайт кракен darknet
Читать далее kraken darknet
I encountered your site after doing a search for new contesting using Google, and decided to stick around and read more of your articles. Thanks for posting, I have your site bookmarked now.
I am glad to be a visitor on this website!, regards for this rare information!
Подробнее kraken зеркало
ссылка на сайт kraken сайт
Thank you for the auspicious writeup.
этот контент kraken онион
I like your style!
читать кракен даркнет
I appreciate, cause I found just what I was looking for. You’ve ended my four day long hunt! God Bless you man. Have a great day. Bye -.
I don’t think the title of your article matches the content lol. Just kidding, mainly because I had some doubts after reading the article.
Very nice post. I just stumbled upon your blog and wanted to say that I’ve really enjoyed browsing your blog posts. In any case I’ll be subscribing to your rss feed and I hope you write again soon!
Подробнее здесь kraken darknet ссылка
в этом разделе kraken сайт
Смотреть здесь kraken darknet ссылка
интернет кракен ссылка
Enjoyed reading through this, very good material. Thanks!
Подробнее здесь kraken сайт
I discovered your weblog site on google and verify just a few of your early posts. Proceed to maintain up the very good operate. I simply further up your RSS feed to my MSN News Reader.
Источник kraken сайт зеркала
узнать больше kraken зеркало
Hello there I am so delighted I found your weblog, I really found you by mistake, while I was searching on Google for something else, Anyhow I am here now and would just like to say cheers for a remarkable post and a all round exciting blog (I also love the theme/design), I don’t have time to browse it all at the moment but I have book-marked it and also included your RSS feeds, so when I have time I will be back to read a lot more, Please do keep up the superb work.
I wish I could craft such articles as this. Thank you very much.
Get More Information paxful log in
of course like your web-site however you have to check the spelling on several of your posts. Many of them are rife with spelling problems and I find it very troublesome to tell the reality then again I will surely come back again.
I really love this article.
перейти на сайт kraken onion ссылка
такой kraken онион
зайти на сайт кракен darknet
Our communities really need to deal with this.
интернет kraken darknet ссылка
Смотреть здесь кракен даркнет
перейти на сайт kraken онион
Enjoyed studying this, very good stuff, thanks.
These stories are so important.
I dont think I’ve read anything like this before. So good to find somebody with some original thoughts on this subject. cheers for starting this up. This blog is something that is needed on the web, someone with a little originality.
подробнее kraken сайт
Смотреть здесь кракен onion
кликните сюда kraken onion
здесь кракен ссылка
посмотреть в этом разделе кракен darknet
Смотреть здесь kraken онион
Thank you for this great piece of content. Best Regards
взгляните на сайте здесь кракен darknet
здесь kraken онион
This is really interesting, You are a very skilled blogger.
I have joined your feed and look forward to seeking more
of your fantastic post. Also, I’ve shared your website in my social networks!
try this website paxful log in
Добрый день!
Умная отложенная загрузка изображений lazy load экономит трафик и ускоряет отображение видимой части страницы. Мы настраиваем загрузку медиа только при прокрутке к ним для оптимизации производительности. Поисковые системы учитывают скорость загрузки и могут улучшать ранжирование оптимизированных страниц. Ваши посетители быстрее получают контент и реже уходят из-за долгого ожидания. Внедряйте lazy load профессионально и получайте бонусы от поисковых алгоритмов.
Правильное разделение коммерческие и информационные запросы позволяет создавать релевантный контент под разные стадии воронки. Мы определяем интент каждой фразы и распределяем их по соответствующим типам страниц. Поисковые системы лучше ранжируют материалы, которые точно отвечают на потребности пользователей. Вы получаете сбалансированную структуру контента и увеличиваете охват аудитории на всех этапах принятия решения. Работайте с типами запросов профессионально и максимизируйте конверсию органического трафика.
Больше информации по ссылке – https://teletype.in/@devvver/evhen-moldovanu
ссылки из контента статей, тематические форумы для продвижения, удаление негатива из выдачи
каталоги статей и ресурсов, обновления алгоритма Google, проверка загружаемого контента
Удачи!
Hello this is a wonderful write-up. I’m going to e mail this to my friends. I came on this while searching on yahoo I’ll be sure to come back. thanks for sharing.
Enjoyed studying this, very good stuff, thanks.
whoah this weblog is great i really like studying your articles. Stay up the great work! You already know, lots of persons are looking round for this information, you can aid them greatly.
в этом разделе кракен darknet
нажмите, чтобы подробнее kraken зеркало
содержание kraken сайт
Главная kraken onion
Смотреть здесь кракен даркнет
site paxful account
view leap wallet x official
over here leap cosmos wallet
pop over here leap wallet extension
this link https://smmpanel.su/
Go Here https://smmpanel.one/
Продолжение https://t.me/vpnsmmone/
Learn More Here https://smmpanel.one
look at this now https://smmpanel.name/
here leapwallet
этот контент https://vpn-one.net/
my response https://smmpanel.one/
try this web-site https://smmpanel.ooo
top article leapwallet
посетить сайт https://vpn-one.net/
the original source leap wallet features
More hints leap cosmos wallet
their website leap wallet features
зайти на сайт https://t.me/vpnsmmone
view website leap wallet twitter profile
веб-сайт https://vpn-one.net/
здесь https://vpn-one.net/
check out the post right here https://smmpanel.name/
navigate to these guys leapwallet
hop over to these guys leapwallet
here https://smmpanel.one
he has a good point https://smmpanel.name
continue reading this leap cosmos wallet
investigate this site https://smmpanel.ooo
directory https://smmpanel.name/
additional reading leap cosmos wallet
content https://smmpanel.ooo
visit coin leap app
view it now https://smmpanel.name/
look at here leap wallet
Узнать больше https://vpn-one.net/
you can try here https://smmpanel.one
Смотреть здесь https://vpn-one.net
navigate to this site leap cosmos wallet
узнать больше https://t.me/vpnsmmone/
click this over here now https://smmpanel.name
that site leap wallet features
посмотреть в этом разделе https://vpn-one.net/
special info leap cosmos wallet
navigate to this web-site https://smmpanel.name
you could try these out leap wallet twitter profile
helpful resources https://smmpanel.ooo
discover here https://smmpanel.name
try these out https://smmpanel.su
here are the findings https://smmpanel.su
Подробнее здесь https://t.me/vpnsmmone
Find Out More https://smmpanel.su
подробнее здесь https://t.me/vpnsmmone/
look here leapwallet
ссылка на сайт https://vpn-one.net/
i was reading this leap wallet extension
перейдите на этот сайт https://vpn-one.net
official source https://smmpanel.name
see this site leap wallet twitter profile
important source leap wallet dashboard
Discover More https://smmpanel.su
продолжить https://t.me/vpnsmmone/
здесь https://t.me/vpnsmmone/
see here now leap wallet dashboard
можно проверить ЗДЕСЬ https://vpn-one.net/
можно проверить ЗДЕСЬ https://vpn-one.net
resource leapwallet
узнать больше https://t.me/vpnsmmone/
click here for more info https://smmpanel.name
get redirected here coin leap app
try this website https://smmpanel.name/
browse around here https://smmpanel.su
check it out https://smmpanel.name
see this here https://smmpanel.su
see https://smmpanel.one
click leap wallet twitter profile
узнать больше https://vpn-one.net
узнать больше https://t.me/vpnsmmone
you can try here https://smmpanel.ooo
проверить сайт https://t.me/vpnsmmone
найти это https://vpn-one.net
Главная https://vpn-one.net
такой https://vpn-one.net
каталог https://vpn-one.net
веб-сайт https://t.me/vpnsmmone
his comment is here https://smmpanel.name/
сайт https://t.me/vpnsmmone
можно проверить ЗДЕСЬ https://vpn-one.net
Click This Link leap wallet extension
you can try this out leap wallet twitter profile
другие https://t.me/vpnsmmone
можно проверить ЗДЕСЬ https://t.me/vpnsmmone/
узнать больше Здесь https://t.me/vpnsmmone/
next page leapwallet
click over here https://smmpanel.ooo
webpage https://smmpanel.ooo/
посетить сайт https://vpn-one.net
read this post here https://smmpanel.ooo
go to this web-site leap wallet dashboard
more tips here https://smmpanel.su/
Discover More Here https://smmpanel.ooo/
this article leap wallet features
интернет https://vpn-one.net/
посетить веб-сайт https://t.me/vpnsmmone
visit this web-site https://smmpanel.su/
Источник https://t.me/vpnsmmone/
pop over here coin leap app
website link leap wallet twitter profile
Click Here leap wallet features
подробнее здесь https://t.me/vpnsmmone
discover here https://smmpanel.one/
взгляните на сайте здесь https://vpn-one.net/
try this out https://smmpanel.ooo
подробнее https://vpn-one.net/
click to read more https://smmpanel.one
link https://smmpanel.one/
browse around this website leapwallet
Смотреть здесь https://vpn-one.net/
visit this website https://smmpanel.name/
click this link here now leap wallet twitter profile
use this link leap wallet
websites https://smmpanel.one/
article https://smmpanel.ooo
why not try here leap wallet dashboard
check this link right here now leap wallet twitter profile
find more https://smmpanel.one/
learn the facts here now https://smmpanel.su
you can check here coin leap app
go to website https://smmpanel.ooo
Главная https://t.me/vpnsmmone
пояснения https://t.me/vpnsmmone/
great post to read https://smmpanel.one/
Check Out Your URL https://smmpanel.one
helpful site leap wallet features
helpful hints https://smmpanel.name/
YOURURL.com https://smmpanel.one
продолжить https://vpn-one.net/
find out here https://smmpanel.ooo
click this link now coin leap app
Подробнее https://t.me/vpnsmmone
go to my blog https://smmpanel.name
Следующая страница https://t.me/vpnsmmone
More Help leapwallet
зайти на сайт https://vpn-one.net
visit site leap wallet extension
нажмите здесь https://t.me/vpnsmmone
description https://smmpanel.ooo/
helpful resources https://smmpanel.one/
check my blog https://smmpanel.one/
каталог https://t.me/vpnsmmone/
узнать https://t.me/vpnsmmone/
посетить веб-сайт https://vpn-one.net
top article leap wallet dashboard
you can look here leapwallet
other https://smmpanel.ooo/
her comment is here leap wallet features
you can look here https://smmpanel.su/
try this website coin leap app
moved here leap wallet dashboard
Web Site leap wallet twitter profile
pop over here leap wallet extension
internet coin leap app
go to my blog https://smmpanel.su/
my review here leap wallet x official
Get the facts leap wallet x official
browse around here https://smmpanel.one/
check my reference leap wallet features
Discover More leap wallet x official
reference leap wallet features
try this website leap wallet
article leapwallet
why not check here leap wallet dashboard
Full Article leap wallet dashboard
he has a good point leap wallet twitter profile
useful reference https://smmpanel.ooo
hop over to this website https://smmpanel.one
look at more info https://smmpanel.name/
official source leap wallet
I concur with your conclusions and will eagerly look forward to your future updates. The usefulness and significance is overwhelming and has been invaluable to me!
right here https://smmpanel.su/
his response https://smmpanel.ooo
why not look here leapwallet
check over here https://smmpanel.name
hop over to these guys https://smmpanel.su/
Hello, I think your blog might be having browser compatibility issues. When I look at your website in Chrome, it looks fine but when opening in Internet Explorer, it has some overlapping. I just wanted to give you a quick heads up! Other than that, awesome blog!
Доброго!
Мощное продвижение в Google Discover открывает поток трафика без прямых поисковых запросов. Мы оптимизируем контент под рекомендации, добавляем качественные изображения и цепляющие заголовки. Алгоритмы платформы показывают такие материалы заинтересованной аудитории и приносят виральный охват. Вы получаете новый источник посетителей и увеличиваете узнаваемость бренда без платного продвижения. Адаптируйтесь под Discover профессионально и масштабируйте органический трафик.
Удобные хлебные крошки навигация упрощают перемещение по разделам и улучшают пользовательский опыт. Мы внедряем понятную цепочку переходов, которая помогает ориентироваться в структуре ресурса. Поисковые системы отображают навигацию в сниппетах и повышают кликабельность выдачи. Ваши клиенты быстрее находят нужные разделы и реже покидают сайт. Улучшайте навигацию и получайте бонусы от поисковых алгоритмов за юзабилити.
Больше информации по ссылке – https://anekdotok.ru/karera/
зона домена ru com org, ROI от поискового трафика, настройка главного зеркала
триггерные рассылки для возврата, навигационные запросы оптимизация, напоминания о брошенной корзине
Удачи!
have a peek at this website https://smmpanel.one/
web https://smmpanel.ooo
basics https://smmpanel.ooo/
use this link https://smmpanel.name
this link https://smmpanel.ooo
visit homepage https://smmpanel.ooo
see this site https://smmpanel.ooo
her response https://smmpanel.one
original site https://smmpanel.ooo
weblink https://smmpanel.one/
hop over to here https://smmpanel.su
I was suggested this website by my cousin. I am not sure whether this post is written by him as no one else know such detailed about my difficulty. You are wonderful! Thanks!
view website https://smmpanel.name
helpful site https://smmpanel.one
investigate this site https://smmpanel.su/
Click Here https://smmpanel.one
moved here https://smmpanel.one
read here https://smmpanel.name/
pop over to these guys https://smmpanel.name/
Read More Here https://smmpanel.su
find more https://smmpanel.su/
over at this website https://smmpanel.su
you could look here https://smmpanel.one/
check https://smmpanel.name
see this website https://smmpanel.ooo
read more https://smmpanel.one
visit site https://smmpanel.one/
read this post here https://smmpanel.ooo/
find more https://smmpanel.ooo/
why not look here https://smmpanel.name
next https://smmpanel.su
Go Here https://smmpanel.one
This Site https://smmpanel.ooo
over here https://smmpanel.ooo/
more information https://smmpanel.su/
French colonialism Africa
blog https://smmpanel.su/
populer oyuncaklar hakk?ndaki yaz?y? tavsiye ederim. Suradan okuyabilirsiniz: https://toycenneti.com/oyuncak-incelemeleri/
browse around these guys https://smmpanel.one/
that site https://smmpanel.name/
see here now https://smmpanel.one
click to read more https://smmpanel.one/
view website https://smmpanel.su
More Help https://smmpanel.one/
read the full info here https://smmpanel.one
look at this now https://smmpanel.su
look these up https://smmpanel.su/
другие vodka bet casino
пояснения vodkabet
Перейти на сайт vodkabet водкабет казино
содержание vodkabet водкабет казино
нажмите casino vodka
подробнее здесь vodka. bet официальный сайт
Читать далее vodka bet
Diversos estudios confirman, el hecho de que mejorar la movilidad urbana influye directamente en el desarrollo del turismo. Debemos prestar atencion a el impacto del transporte buscando optimizar el crecimiento de la ciudad frente a los desafios actuales.
Informacion: https://aa.activeboard.com/t72637774/cmo-afecta-este-fenmeno-a-la-movilidad-urbana/?page=last#lastPostAnchor
ทดลองเล่นสล็อต pg
ระบบสล็อตออนไลน์รุ่นใหม่กำลังยกระดับจากเกมคาสิโนออนไลน์แบบพื้นฐานไปสู่ระบบคาสิโนออนไลน์ที่เน้นความเสถียรและความเร็ว และใช้ระบบ APIร่วมกับระบบหลังบ้านที่ตอบสนองรวดเร็ว ผู้เล่นจำนวนมากเริ่มให้ความสนใจกับสล็อตเว็บตรง เพราะระบบตอบสนองได้รวดเร็วกว่าระบบตัวกลาง และช่วยลดปัญหาความล่าช้า อาการเกมสะดุด รวมถึงข้อผิดพลาดของธุรกรรม
ระบบเกมที่เชื่อมต่อโดยตรงจะส่งข้อมูลไปยังผู้ให้บริการเกมผ่านช่องทาง API หลัก ทำให้ข้อมูลการเล่นถูกส่งแบบทันทีโดยไม่ต้องผ่านหลายเซิร์ฟเวอร์ ส่งผลให้เกมทำงานลื่นขึ้น ลดอาการค้างระหว่างเข้าโหมดพิเศษ และช่วยให้การคำนวณรางวัลทำงานได้ลดข้อผิดพลาดได้ดีกว่า
อีกหนึ่งองค์ประกอบที่ทำให้ระบบนี้น่าสนใจคือระบบธุรกรรมอัตโนมัติ ผู้เล่นสามารถจัดการยอดเงินได้ตลอด24 ชั่วโมง โดยไม่จำเป็นต้องเสียเวลารอเจ้าหน้าที่เหมือนแพลตฟอร์มที่ยังใช้การตรวจสอบด้วยคน ทำให้การฝากถอนระหว่างเล่นมีความแม่นยำกว่าเดิม
สาเหตุที่สล็อตเว็บตรงได้รับความนิยมคือความน่าเชื่อถือและความต่อเนื่องของเซิร์ฟเวอร์ เซิร์ฟเวอร์ที่เชื่อมต่อกับค่ายเกมโดยตรงช่วยลดโอกาสเกิดความคลาดเคลื่อนของข้อมูล ผู้เล่นจึงตรวจสอบได้ว่าผลลัพธ์ของเกมมาจากกลไกสุ่มของค่ายเกม
นอกจากนี้ เว็บสมัยใหม่ยังมีการพัฒนาระบบแสดงผลบนสมาร์ตโฟนโดยเฉพาะ เช่น หน้าจอที่ออกแบบให้ใช้มือเดียวได้สะดวก การเปิดหน้าเกมโดยไม่หน่วง และระบบบันทึกสถานะอัตโนมัติที่ช่วยคืนสถานะเกมเมื่อการเชื่อมต่อมีปัญหา
แพลตฟอร์มสล็อตยุคใหม่เริ่มใช้AI วิเคราะห์ข้อมูล ร่วมกับระบบประมวลผลบนคลาวด์และระบบซิงค์ข้อมูลแบบเรียลไทม์เพื่อรองรับทราฟฟิกจำนวนสูง บางระบบยังรองรับระบบธุรกรรมคริปโตเพื่อเพิ่มความปลอดภัยของข้อมูลและลดการพึ่งพาช่องทางการเงินแบบเก่า
อุตสาหกรรมสล็อตออนไลน์จึงกำลังพัฒนาจากระบบเกมออนไลน์แบบเก่าไปสู่ระบบเทคโนโลยีเต็มรูปแบบ โดยความเสถียรและความต่อเนื่องของระบบกลายเป็นปัจจัยสำคัญในการประเมินคุณภาพผู้ให้บริการ
เมื่อเทคโนโลยีพัฒนาเร็วขึ้นแพลตฟอร์มสล็อตจะยิ่งแข่งขันกันด้านความเร็วของเซิร์ฟเวอร์มากขึ้น ไม่ว่าจะเป็นการตอบสนองของหน้าเกม เครื่องมือวิเคราะห์ข้อมูลผู้ใช้งาน หรือระบบความปลอดภัยของข้อมูล ผู้ให้บริการที่มีAPI เชื่อมต่อโดยตรงและเชื่อมต่อกับค่ายเกมโดยตรงจะได้เปรียบมากกว่าเว็บทั่วไปที่ยังใช้การเชื่อมต่อแบบเก่า
คนที่เลือกแพลตฟอร์มอย่างจริงจังจึงไม่ได้มองแค่ของแจกอีกต่อไป แต่เริ่มให้ความสำคัญกับความเสถียรของระบบ ความต่อเนื่องของระบบการเงิน และความพร้อมของระบบเมื่อต้องรองรับผู้เล่นจำนวนมาก
содержание vodka. bet официальный сайт
посмотреть в этом разделе vodkabet
взгляните на сайте здесь водкабет играть сейчас
такой водкабет
Привет всем!
Эффективное водность контента снижение повышает информативность и ценность материалов для аудитории. Мы убираем лишние слова и штампы, оставляя только суть и пользу для читателя. Поисковые системы фиксируют положительные поведенческие сигналы и улучшают ранжирование страниц. Ваши посетители быстрее находят ответы и охотнее конвертируются в клиентов. Пишите ёмко и по делу, получая максимум отдачи от каждого текста.
Эффективное удаление неиспользуемого кода уменьшает вес страниц и ускоряет их обработку браузером. Мы анализируем покрытие JS/CSS и исключаем мёртвые функции и стили из сборки. Поисковые алгоритмы ценят лёгкие страницы и улучшают их позиции в результатах поиска. Ваши посетители быстрее получают контент и реже уходят из-за долгой загрузки. Очищайте код профессионально и получайте бонусы от поисковых систем.
Больше информации по ссылке – https://мояоптима.СЂС„/franchayzing/
ссылки из контента статей, разграничение прав доступа, траст домена как повысить
карусели товаров в поиске, файл robots.txt правила, онлайн-консультант в реальном времени
Удачи!
Продолжение водкабет казино
I like meeting utile info, this post has got me even more info!
опубликовано здесь vodka bet
Главная vodka bet
nicee content keep writing
Следующая страница водка бет
сюда vodka bet casino
I like your blog. It sounds every informative.
подробнее водка бет
Hi, do have a e-newsletter? In the event you don’t definately should get on that piece…this web site is pure gold!
Главная водкабет играть сейчас
кликните сюда водкабет
в этом разделе водкабет
Does it look like we’re in for a big ride here?
Our local network of agencies has found your research so helpful.
neocolonialism Africa
Перейти на сайт водкабет казино
Tips and tools you offer are so helpful to agencies in our community.
Перейти на сайт vodka bet casino
сюда
Займ без отказа
страница
Займ в день обращения
пояснения
Займ с плохой КИ
перейдите на этот сайт
Займ до зарплаты
можно проверить ЗДЕСЬ Займ без процентов
опубликовано здесь
Займ 15 000 рублей
ссылка на сайт
Займ круглосуточно
другие
Займ не выходя из дома
смотреть здесь
Займ 30 000 рублей
выберите ресурсы
Займ по паспорту
на этом сайте
Займ в день обращения
узнать больше
Быстрые займы
содержание
Займы на 3 дня онлайн
Источник
Экспресс займ
нажмите здесь
Займы на 1 день
перенаправляется сюда
Займ 10 000 рублей
сюда
Быстрые займы
зайти на сайт
Займы на 1 день
Продолжение
Займы на 3 дня онлайн
интернет
Займ онлайн на карту
узнать больше Здесь
Быстрые займы
Tried 24bet Onlinecasino last week and it seems ok so far but gonna give it more time before I fully recomend it to anyone, still being cautious since ive been burnt before with these kinds of sites.
нажмите
Займ круглосуточно
здесь
Займ по паспорту
кликните сюда
Онлайн займ
проверить сайт
Займ через Госуслуги
можно проверить ЗДЕСЬ
Займ 10 000 рублей
смотреть здесь
Займ до зарплаты
каталог
Займ до зарплаты
88stars 88stars .
Смотреть здесь
Займ с плохой КИ
страница
Займ на карту
узнать больше
Займ 15 000 рублей
читать
Займ не выходя из дома
взгляните на сайте здесь
Займ до зарплаты
каталог
Займ на карту
этот сайт
Займ онлайн на карту
узнать больше
Займы на 3 дня онлайн
подробнее здесь
Займ 10 000 рублей
Перейти на сайт
Займ на карту Сбербанка
нажмите, чтобы подробнее
Займ до зарплаты
посетить сайт
Онлайн займ
здесь
Быстрые займы
Tried it but honestly still on the fence about the whole thing, seems ok so far but gonna give it more time before I decide if its really worth sticking with. 777 bit isn’t bad, just need to see how it goes.
ссылка на сайт
Экспресс займ
Узнать больше
Экспресс займ
веб-сайте
Займ 30 000 рублей
ссылка на сайт
Займы на 1 день
Узнать больше
Займ 15 000 рублей
сюда
Займ онлайн на карту
Источник
Онлайн займ
здесь
Быстрые займы
веб-сайт
Моментальные займы
выберите ресурсы
Займ онлайн на карту
нажмите здесь
Онлайн займ
пояснения
Займ круглосуточно
веб-сайт
Займ 10 000 рублей
Перейти на сайт Займ без процентов
нажмите здесь
Займ на карту
Подробнее
Моментальные займы
содержание
Онлайн займ
страница
Займ с плохой КИ
пояснения Займ без процентов
найти это
Займ на карту
The CBD store – mood weed gummies offers a variety of formats that please singular preferences, and each harmonious feels well executed. The oil appears blameless and accordance, the packaging materials discern long-lasting, and the layout is unostentatious besides elegant. The products are comfortable to assemble and treks with, thanks to secure lids and compact sizing. Overall, the label delivers a impeccable and carefully crafted experience without surplus extras.
ссылка на сайт
Займ не выходя из дома
перейдите на этот сайт
Займ в день обращения
сайт
Займ на два дня
подробнее
Займы на 1 день
Смотреть здесь
Моментальные займы
нажмите здесь
Деньги в долг на карту
веб-сайт
Займ с плохой КИ
проверить сайт
Займ на два дня
It’s the best time to make some plans for the future and it is time to be happy. I’ve read this post and if I could I wish to suggest you some interesting things or tips. Maybe you can write next articles referring to this article. I wish to read even more things about it!
I enjoy your blog posts, saved to my bookmarks!
you could check here
telegram views provider
Aw, this was a very nice post. In idea I wish to put in writing like this moreover taking time and precise effort to make an excellent article! I procrastinate alot and by no means seem to get something done.
review
instagram views provider
Os clipes de max win do Emperor’s Favour enganam — sessão média é bem mais calma.
pg slot
ระบบสล็อตออนไลน์รุ่นใหม่กำลังยกระดับจากเกมคาสิโนออนไลน์แบบพื้นฐานไปสู่โครงสร้างเกมออนไลน์ที่ใช้เซิร์ฟเวอร์ความเร็วสูง และใช้การเชื่อมต่อ API โดยตรงร่วมกับระบบหลังบ้านที่ตอบสนองรวดเร็ว ผู้เล่นจำนวนมากเริ่มเลือกใช้สล็อตเว็บตรง เพราะระบบทำงานลื่นกว่า และช่วยลดปัญหาการดีเลย์ ปัญหาหน้าจอหยุดระหว่างเล่น รวมถึงความล่าช้าในการอัปเดตยอดเงิน
โครงสร้างสล็อต API ตรงจะเชื่อมต่อกับผู้ให้บริการเกมผ่านAPI โดยตรง ทำให้ข้อมูลการเล่นถูกส่งแบบอัตโนมัติโดยไม่ต้องผ่านระบบกรองข้อมูลเพิ่มเติม ส่งผลให้เกมโหลดเร็วขึ้น ลดปัญหาข้อมูลรอบเล่นคลาดเคลื่อน และช่วยให้ระบบแจ็คพอตทำงานได้ลดข้อผิดพลาดได้ดีกว่า
อีกหนึ่งองค์ประกอบที่ทำให้ระบบนี้น่าสนใจคือระบบธุรกรรมอัตโนมัติ ผู้เล่นสามารถฝากถอนเงินได้ตลอดทุกเวลา โดยไม่จำเป็นต้องเสียเวลารอเจ้าหน้าที่เหมือนแพลตฟอร์มที่ยังใช้การตรวจสอบด้วยคน ทำให้การควบคุมยอดเงินมีความคล่องตัวกว่าเดิม
เหตุผลหลักที่ผู้เล่นเลือกสล็อตเว็บตรงคือความโปร่งใสและการตอบสนองที่รวดเร็ว เซิร์ฟเวอร์ที่เชื่อมต่อกับค่ายเกมโดยตรงช่วยลดโอกาสเกิดความคลาดเคลื่อนของข้อมูล ผู้เล่นจึงเชื่อถือได้ว่าผลลัพธ์ของเกมมาจากกลไกสุ่มของค่ายเกม
อีกด้านหนึ่ง เว็บสมัยใหม่ยังมีการพัฒนาUX/UI สำหรับมือถือโดยเฉพาะ เช่น โหมดจอมือถือแนวตั้ง การโหลดหน้าแบบ Dynamic และระบบบันทึกสถานะอัตโนมัติที่ช่วยคืนสถานะเกมเมื่อการเชื่อมต่อมีปัญหา
ผู้ให้บริการสล็อตสมัยใหม่เริ่มใช้เครื่องมือวิเคราะห์แบบเรียลไทม์ ร่วมกับระบบประมวลผลบนคลาวด์และระบบซิงค์ข้อมูลแบบเรียลไทม์เพื่อรองรับผู้ใช้งานจำนวนมากพร้อมกัน บางระบบยังรองรับเทคโนโลยีบล็อกเชนเพื่อเพิ่มความยืดหยุ่นด้านการชำระเงินและลดการพึ่งพาช่องทางการเงินแบบเก่า
อุตสาหกรรมสล็อตออนไลน์จึงกำลังเปลี่ยนจากเว็บสล็อตทั่วไปไปสู่ระบบบริการออนไลน์ที่ต้องแข่งขันด้านประสิทธิภาพ โดยความเร็วและประสบการณ์ผู้ใช้กลายเป็นปัจจัยสำคัญในการเปรียบเทียบระบบของแต่ละเว็บ
ต่อจากนี้แพลตฟอร์มสล็อตจะยิ่งแข่งขันกันด้านประสิทธิภาพของระบบมากขึ้น ไม่ว่าจะเป็นการตอบสนองของหน้าเกม ระบบ AI วิเคราะห์พฤติกรรมผู้เล่น หรือการป้องกันข้อมูลส่วนตัว ผู้ให้บริการที่มีระบบหลังบ้านแข็งแรงและเชื่อมต่อกับค่ายเกมโดยตรงจะแข่งขันได้แข็งแรงกว่าเว็บทั่วไปที่ยังใช้ระบบตรวจสอบที่ไม่อัตโนมัติเต็มรูปแบบ
กลุ่มผู้เล่นที่ให้ความสำคัญกับคุณภาพระบบจึงไม่ได้มองแค่ของแจกอีกต่อไป แต่เริ่มให้ความสำคัญกับคุณภาพของระบบ ความไวของการฝากถอน และความพร้อมของระบบเมื่อต้องรองรับผู้เล่นจำนวนมาก
Transferência bancária caiu. Lenta mas segura.
Click Here
telegram own members
their website
telegram promotion service
check these guys out
tiktok views service
her latest blog
telegram views provider
перейдите на этот сайт
положительные реакции max
Подключили онлайн-кассу АТОЛ к 1С УНФ — чеки формируются автоматически при проведении продажи. Настройка обмена с ОФД заняла один день, работает без нареканий. 1С Управление нашей фирмой Белгород
website link
telegram growth service
check out here
telegram premium members
site here
buy instagram followers
you can try this out
buy tiktok followers
straight from the source
telegram real members
Продолжение
увеличить просмотры max
страница
подписчики max 90 суток
Puxei 2.000 giros no Medusa II mês passado. Hit rate bateu o número publicado, mais ou menos.
O fórum já sabe quem mutar. A galera dos dados ficou.
A enfermeira do plantão noturno perdeu R$300 fazendo chasing no Santa’s Gift Rush, postou o comprovante, assumiu. Respeito.
Saí no green. Raro.
you can look here
buy youtube views
Disciplina chata bate sessão emocionante.
Deu green inesperado. Vou dormir feliz.
Fortune Ox me carregou hoje.
ссылка на сайт
просмотры max на пост
have a peek at this web-site
telegram instant members
he has a good point
cheap instagram likes
O motorista de uber que joga entre corridas só joga Jewel Race Ganesha no domingo. Diz que paga melhor. A gente riu, os dados concordam.
click this site
smm reseller panel
Uma conta que sigo só joga Butterfly Blossom no domingo. Diz que paga melhor. A gente riu, os dados concordam.
Voltei pro Fortune Mouse. Por quê.
Читать далее
подписчики max 30 дней
Cansei do Fortune Rabbit essa semana.
Alguém do chat fez um print da banca subindo no Opera Dynasty e mandou no grupo. Galera aplaudiu.
A streamer com 80 viewers fechou a sessão de Lucky Neko no green, foi dormir. Disciplina simples assim.
Por que o bônus do Fortune Rabbit sempre cai quando eu tô prestes a sair? kkkkk
Dia de patch. Espera e observa.
Pulando Wild Wild Riches até o próximo patch.
проверить сайт
мужские подписчики max
O cara de ti com a planilha perdeu R$500 fazendo chasing no Santa’s Gift Rush, postou o comprovante, assumiu. Respeito.
look here
youtube subscribers service
A galera dos dados resumão do fim de semana é a única coisa que leio na segunda.
Fortune Dragon não me deve nada.
I concur with your conclusions and will eagerly look forward to your future updates. The usefulness and significance is overwhelming and has been invaluable to me!
click to read
smm reseller panel
другие
подписчики max канал
подробнее
подписчики max без списаний
Se o Dragon Hatch 2 comeu 30% da banca sem feature, acabou. Sai.
Comecei Treasures of Aztec com R$30, saí com R$420.
O motoboy de pinheiros chamou o Jewel Race Ganesha de “o único honesto” — meio brincando, meio não.
Discover More
cheap smm panel
проверить сайт
реакции max на пост
посмотреть в этом разделе
подписчиков max
Ignite your resourceful suggestion with hybrid THCA flower. Because hybrids like organic and functional mushroom gummies tie the distinction between rational clarity and physical relief, they are incredibly approved among artists, writers, and thinkers. It provides just ample corporal calm to quiet the fidgets while keeping your mind sharp, quick, and ready to brainstorm. Observation a balanced glide state like not in a million years before.
этот контент
реакции сердце max
Your thing regarding creating will be practically nothing in short supply of awesome. This informative article is incredibly useful and contains offered myself a better solution to be able to my own issues. Which can be the specific purpose MY PARTNER AND I has been doing a search online. I am advocating this informative article with a good friend. I know they are going to get the write-up since beneficial as i would. Yet again many thanks.
I want to see your book when it comes out.
Пекарня с 10 точками в Белгороде. Настроили единую базу, рецептуры, автосписание. Теперь видим себестоимость каждой позиции и рентабельность по каждой точке отдельно. 1С УНФ для оптовой торговли
Casas sostenibles – Segunda residencia, Materiales naturales
Construcción industrializada – Casas de madera, Casas de madera
Alta calidad – Carcasa de madera, Alta calidad
O grupo do telegram fixou o tópico de regras de banca. Finalmente.
Llave en mano – Construcción industrializada, Carcasa de madera
I know this is not exactly on topic, but i have a blog using the blogengine platform as well and i’m having issues with my comments displaying. is there a setting i am forgetting? maybe you could help me out? thank you.
Bajo consumo energético – Wood frame, Construcción de casas en Cataluña
Construcción de casas en Cataluña – Construcción de casas, Alta calidad
Casas sostenibles – Construcción industrializada, Construcción de casas en Cataluña
Construcción de casas en Cataluña – Carcasa de madera, Montaje rapido y eficiente
Diseño moderno – Bajo consumo energético, Alta calidad
Construcción de casas – Madera certificada, Carcasa de madera
I saw a similar post on another website but the points were not as well articulated.
Casas de madera – Construcción de casas en Cataluña, Materiales naturales
Bajo consumo energético – Materiales naturales, Diseño moderno
Construcción de casas en Cataluña – Montaje rapido y eficiente, Segunda residencia
Vivienda ecológica – Inversión inteligente, Construcción industrializada
Alta calidad – Llave en mano, Materiales naturales
Casas sostenibles – Materiales naturales, Diseño moderno
Casas de madera – Llave en mano, Construcción de casas en Cataluña
Llave en mano – Wood frame, Casa eficiente
Construcción industrializada – Inversión inteligente, Casa eficiente
Segunda residencia – Casa eficiente, Wood frame
Bajo consumo energético – Construcción de casas, Materiales naturales
Diseño moderno – Carcasa de madera, Construcción de casas
Carcasa de madera – Carcasa de madera, Llave en mano
Enjoyed reading through this, very good material. Thanks!
Construcción de casas en Cataluña – Materiales naturales, Vivienda ecológica
Llave en mano – Bajo consumo energético, Construcción de casas en Cataluña
Segunda residencia – Casa eficiente, Casas de madera
Construcción de casas – Madera certificada, Vivienda ecológica
Llave en mano – Construcción de casas en Cataluña, Madera certificada
Montaje rapido y eficiente – Segunda residencia, Construcción de casas
Bajo consumo energético – Inversión inteligente, Carcasa de madera
Inversión inteligente – Montaje rapido y eficiente, Casa eficiente
подробнее Кашпо из ротанга
Casa eficiente – Carcasa de madera, Wood frame
Casa eficiente – Madera certificada, Wood frame
Inversión inteligente – Vivienda ecológica, Madera certificada
Construcción de casas en Cataluña – Construcción de casas en Cataluña, Alta calidad
Bajo consumo energético – Inversión inteligente, Construcción de casas
Materiales naturales – Llave en mano, Casas sostenibles
в этом разделе купить травмат Екатеринбург
смотреть здесь магазин травмат СПБ
подробнее здесь оружие для самообороны СПБ
посмотреть на этом сайте оружие самообороны Москва купить
посетить сайт оружие для самообороны СПБ
Carcasa de madera – Casas de madera, Segunda residencia
Construcción industrializada – Llave en mano, Inversión inteligente
интернет травматическое оружие Махачкала
купить технику Вольво http://www.tech-group.com.ua
нажмите здесь оружие самообороны Москва купить
каталог купить травмат без опыта
узнать больше разрешённое оружие для граждан
узнать больше оружие самообороны Махачкала
подробнее магазин травмат СПБ
проверить сайт магазин травмат ЕКБ
перейти на сайт магазин травмат СПБ
узнать больше Здесь лицензия на травматическое оружие
Madera certificada – Casa eficiente, Vivienda ecológica
смотреть здесь лицензия на травматическое оружие
Construcción de casas – Casa eficiente, Construcción industrializada
Llave en mano – Madera certificada, Wood frame
взгляните на сайте здесь магазин травмат Махачкала
Смотреть здесь оружие самообороны Махачкала
Madera certificada – Materiales naturales, Construcción de casas
посмотреть на этом сайте травмат пистолет Москва цена
Inversión inteligente – Construcción industrializada, Alta calidad
проверить сайт травмат пистолет Санкт-Петербург
Construcción industrializada – Alta calidad, Madera certificada
каталог оружие самообороны купить
другие оружие самообороны купить
можно проверить ЗДЕСЬ купить травмат без документов
этот контент травмат пистолет Махачкала
Bajo consumo energético – Inversión inteligente, Materiales naturales
Смотреть здесь купить травматический пистолет
Carcasa de madera – Vivienda ecológica, Materiales naturales
Diseño moderno – Inversión inteligente, Construcción de casas
выберите ресурсы лицензия на травматическое оружие
Смотреть здесь купить травмат СПБ
узнать больше Здесь оружие самообороны купить
найти это оружие самообороны Екатеринбург
другие травматическое оружие Москва
узнать магазин травмат СПБ
проверить сайт оружие самообороны Махачкала
The post is absolutely fantastic! Lots of great info and inspiration, both of which we all need! Also like to admire the time and effort you put into your website and detailed info you offer! I will bookmark your website!
посетить веб-сайт купить травмат СПБ
сервис тойота сервис тойота
Carcasa de madera – Casas de madera, Construcción de casas en Cataluña
Источник травмат пистолет Санкт-Петербург
другие купить травмат СПБ
Bajo consumo energético – Casas sostenibles, Llave en mano
Узнать больше купить травмат Екатеринбург
можно проверить ЗДЕСЬ где купить травмат
Construcción de casas – Madera certificada, Madera certificada
опубликовано здесь травмат для самообороны
перейдите на этот сайт как получить лицензию на травмат
Alta calidad – Diseño moderno, Casas sostenibles
Vivienda ecológica – Construcción de casas, Casas sostenibles
Materiales naturales – Wood frame, Casas sostenibles
Alta calidad – Construcción de casas, Wood frame
здесь травмат пистолет Москва цена
Madera certificada – Llave en mano, Diseño moderno
Llave en mano – Carcasa de madera, Casa eficiente
Casa eficiente – Construcción de casas en Cataluña, Casas sostenibles
Следующая страница купить травмат Екатеринбург
нажмите травматическое оружие Москва
выберите ресурсы оружие самообороны Махачкала
Diseño moderno – Bajo consumo energético, Casas sostenibles
проверить сайт купить травмат Москва
Montaje rapido y eficiente – Carcasa de madera, Construcción de casas
Spot on with this write-up, I actually assume this website needs far more consideration. I will in all probability be once more to learn rather more, thanks for that info.
Madera certificada – Inversión inteligente, Construcción industrializada
каталог магазин травмат ЕКБ
продолжить магазин травмат ЕКБ
ссылка на сайт где купить травмат
Llave en mano – Vivienda ecológica, Madera certificada
опубликовано здесь оружие самообороны Махачкала
Casas de madera – Wood frame, Segunda residencia
Подробнее здесь травмат онлайн магазин
Продолжение лицензия на травматическое оружие
Vivienda ecológica – Carcasa de madera, Madera certificada
сайт травматический пистолет цена
карьерная техника VOLVO CE http://www.tech-group.com.ua
Construcción de casas en Cataluña – Inversión inteligente, Construcción industrializada
узнать больше травматическое оружие купить
нажмите травмат для новичка
Construcción de casas – Casas de madera, Segunda residencia
Madera certificada – Wood frame, Diseño moderno
Great post. I was checking constantly this blog and I’m impressed! Very useful info specifically the last part 🙂 I care for such info much. I was looking for this certain information for a very long time. Thank you and good luck.
Montaje rapido y eficiente – Materiales naturales, Construcción de casas
Diseño moderno – Llave en mano, Inversión inteligente
этот сайт магазин травматического оружия Москва
Casa eficiente – Construcción de casas, Casas de madera
Alta calidad – Diseño moderno, Segunda residencia
Construcción industrializada – Casas de madera, Construcción de casas en Cataluña
Carcasa de madera – Casas de madera, Construcción de casas
Llave en mano – Construcción industrializada, Llave en mano
Cherished is likely to be what people say about your comments.
Inversión inteligente – Construcción de casas, Casa eficiente
Inversión inteligente – Construcción de casas en Cataluña, Montaje rapido y eficiente
Перейти на сайт оружие самообороны Москва купить
Vivienda ecológica – Montaje rapido y eficiente, Construcción industrializada
Segunda residencia – Construcción de casas en Cataluña, Vivienda ecológica
Wood frame – Materiales naturales, Carcasa de madera
здесь травмат онлайн магазин
проверить сайт лучший травматический пистолет 2026
Llave en mano – Materiales naturales, Vivienda ecológica
Узнать больше купить травмат Махачкала
Fantastic piece of writing here1
There most be a solution for this problem, some people think there will be now solutions, but i think there wil be one.
сервис тойота в москве https://techautoport.ru/news/sezonnoe-to-toyota-kakie-raboty-obyazatelno-vypolnyat-vesnoy-i-osenyu-dlya-nadezhnosti-avtomobilya.html
смотреть здесь травмат пистолет Махачкала
в этом разделе магазин травмат СПБ
зайти на сайт оружие ограниченного поражения
Carcasa de madera – Construcción de casas, Segunda residencia
I really love this article.
You certainly deserve a round of applause for your post and more specifically, your blog in general. Very high quality material!
ссылка на сайт магазин травмат СПБ
Vivienda ecológica – Bajo consumo energético, Diseño moderno
другие травмат пистолет Санкт-Петербург
Bu arada, eger barbie film suresi konusuyla ilgileniyorsan?z, suraya bir goz at?n. Suradan okuyabilirsiniz: https://toysakademi.com/articles/barbie-filmi-suresi/
When are you going to post again? You really entertain me!
A friend of mine advised me to review this site. And yes. it has some useful pieces of info and I enjoyed reading it.
The content is very inclusive, respecting the differences of different groups and individuals. JiliMoneyComing It does not discriminate or exclude, conveying a harmonious concept.
Volvo Украина https://tech-group.com.ua
крипто букмекеры крипто букмекеры
бк Литвы бк Литвы
каталог трип скан официальный
интернет трип скан вход
Главная трипскан вход
подробнее tripskan
посмотреть на этом сайте tripskan
Источник сайт трип скан
проверить сайт трипскан официальный сайт
Смотреть здесь https://soulestate.ru/novosti/
посетить сайт трип скан официальный сайт
страница https://soulestate.ru/catalog/vtorichnoe-jilio/gorod-stolits66154/
выберите ресурсы https://soulestate.ru/catalog-object-page-1-sort-1-typePlace-village-currency-224-remont-161/
в этом разделе tripscan вход
Stop-win bateu. Saí.
перейдите на этот сайт tripscan зеркало
перейти на сайт трипскан официальный сайт
проверить сайт трип скан официальный
сайт трипскан ссылка
сюда трипскан официальный сайт
здесь tripscan зеркало
продолжить tripscan вход
ремонт тойота в москве ремонт тойота в москве
Перейти на сайт трипскан сайт вход
этот контент трипскан ссылка
читать трипскан вход
опубликовано здесь трипскан сайт вход
Alguém tá mesmo tracking taxa de bônus do Treasures of Aztec numa planilha real, sem ser feeling?
нажмите здесь трип скан официальный сайт
Disciplina chata bate sessão emocionante.
Подробнее здесь tripscan вход
Читать далее трип скан официальный сайт
Продолжение трипскан официальный сайт
посетить сайт трипскан вход
найти это трип скан официальный
зайти на сайт tripscan зеркало
нажмите трип скан официальный сайт
можно проверить ЗДЕСЬ трипскан вход
пояснения сайт трип скан
посетить сайт трипскан сайт вход
ставки на спорт Литвы ставки на спорт Литвы
крипто букмекерские конторы крипто букмекерские конторы
продажа спецтехники Volvo http://www.tech-group.com.ua
посмотреть на этом сайте трип скан вход
узнать больше Здесь трип скан официальный
Продолжение https://soulestate.ru/catalog/novostroiki/prime-park66872/
перейти на сайт трипскан сайт вход
Продолжение сайт трипскан
проверить сайт tripscan зеркало
продолжить tripscan официальный
ссылка на сайт https://soulestate.ru/catalog/vtorichnoe-jilio/dom-na-mosfil-movskoy66097/
Best casino evar https://betalice-de.app/
pg slot
สล็อตออนไลน์ยุคใหม่กำลังพัฒนาจากระบบเกมหมุนวงล้อคลาสสิกไปสู่แพลตฟอร์มดิจิทัลที่ขับเคลื่อนด้วย API โดยมีระบบ APIร่วมกับระบบประมวลผลที่เสถียร ผู้เล่นจำนวนมากเริ่มให้ความสนใจกับสล็อตเว็บตรง เพราะระบบทำงานลื่นกว่า และช่วยลดปัญหาการดีเลย์ ความผิดพลาดระหว่างการหมุน รวมถึงข้อผิดพลาดของธุรกรรม
ระบบสล็อตเว็บตรงจะเชื่อมต่อกับระบบของผู้พัฒนาเกมผ่านAPI โดยตรง ทำให้ข้อมูลรอบหมุนถูกส่งแบบทันทีโดยไม่ต้องผ่านตัวกลางหลายชั้น ส่งผลให้เกมเปิดได้เร็วขึ้น ลดปัญหาข้อมูลรอบเล่นคลาดเคลื่อน และช่วยให้ระบบฟรีสปินทำงานได้ต่อเนื่องกว่าเดิม
ปัจจัยสำคัญอีกด้านคือระบบฝากถอนอัตโนมัติ ผู้เล่นสามารถทำธุรกรรมได้ตลอดทุกเวลา โดยไม่จำเป็นต้องพึ่งพาระบบตรวจสอบแบบเก่าเหมือนระบบรุ่นเก่า ทำให้การฝากถอนระหว่างเล่นมีความแม่นยำกว่าเดิม
เหตุผลหลักที่ผู้เล่นเลือกสล็อตเว็บตรงคือความโปร่งใสและความต่อเนื่องของเซิร์ฟเวอร์ เซิร์ฟเวอร์ที่ผูกกับระบบเกมต้นทางช่วยลดความไม่แน่นอนของระบบตัวกลาง ผู้เล่นจึงเข้าใจได้ว่าผลลัพธ์ของเกมมาจากระบบ RNG จริง
นอกจากนี้ เว็บสมัยใหม่ยังมีการพัฒนาUX/UI สำหรับมือถือโดยเฉพาะ เช่น โหมดจอมือถือแนวตั้ง การเปิดหน้าเกมโดยไม่หน่วง และระบบกู้คืนสถานะเกมที่ช่วยกู้รอบเล่นเมื่อผู้เล่นออกจากเกมชั่วคราว
ผู้ให้บริการสล็อตสมัยใหม่เริ่มใช้AI วิเคราะห์ข้อมูล ร่วมกับเซิร์ฟเวอร์คลาวด์ที่ขยายตัวได้และการซิงค์ APIเพื่อรองรับทราฟฟิกจำนวนสูง บางระบบยังรองรับเทคโนโลยีบล็อกเชนเพื่อเพิ่มความเป็นส่วนตัวและลดความเสี่ยงจากระบบธนาคารที่ปิดปรับปรุง
ธุรกิจคาสิโนออนไลน์จึงกำลังเปลี่ยนจากแพลตฟอร์มที่เน้นแค่เกมและโปรโมชั่นไปสู่ระบบเทคโนโลยีเต็มรูปแบบ โดยคุณภาพเซิร์ฟเวอร์และประสบการณ์ผู้ใช้กลายเป็นปัจจัยสำคัญในการตัดสินใจใช้งานเว็บสล็อต
ในอนาคตแพลตฟอร์มสล็อตจะยิ่งแข่งขันกันด้านเสถียรภาพของแพลตฟอร์มมากขึ้น ไม่ว่าจะเป็นการประมวลผลธุรกรรม เครื่องมือวิเคราะห์ข้อมูลผู้ใช้งาน หรือการป้องกันข้อมูลส่วนตัว ผู้ให้บริการที่มีระบบหลังบ้านแข็งแรงและเชื่อมต่อกับค่ายเกมโดยตรงจะแข่งขันได้แข็งแรงกว่าเว็บทั่วไปที่ยังใช้ระบบตรวจสอบที่ไม่อัตโนมัติเต็มรูปแบบ
กลุ่มผู้เล่นที่ให้ความสำคัญกับคุณภาพระบบจึงไม่ได้มองแค่แคมเปญการตลาดอีกต่อไป แต่เริ่มให้ความสำคัญกับมาตรฐานทางเทคนิคของแพลตฟอร์ม ความต่อเนื่องของระบบการเงิน และความลื่นของเกมระหว่างใช้งาน
перенаправляется сюда tripscan сайт
опубликовано здесь tripscan сайт
перейдите на этот сайт сайт трип скан
этот сайт трип скан вход
посмотреть в этом разделе сайт трип скан
сервис тойота в москве http://techautoport.ru/news/sezonnoe-to-toyota-kakie-raboty-obyazatelno-vypolnyat-vesnoy-i-osenyu-dlya-nadezhnosti-avtomobilya.html
Os clipes de max win do Fortune Gods enganam — sessão média é bem mais calma.
Variância é real. Vibe não.
продолжить tripskan
Os veteranos fixou o tópico de regras de banca. Finalmente.
Uma conta que sigo chamou o Wizdom Wonders de “o único honesto” — meio brincando, meio não.
Uma conta que sigo parou de jogar Hood vs Wolf depois do patch do Q1. Voltou semana passada. Outro jogo agora, ele diz.
O Fortune Rabbit tá pagando melhor que o Dim Sum Prize essa semana ou eu tô tiltado?
читать трип скан
Por que o bônus do Secrets of Cleopatra sempre cai quando eu tô prestes a sair? kkkkk
Читать далее трипскан официальный сайт
Bônus no Santa’s Gift Rush. Fechei. Acabou.
продолжить tripscan официальный сайт
здесь tripskan
нажмите tripskan
сюда трип скан официальный
здесь трип скан вход
Смотреть здесь tripscan вход
нажмите, чтобы подробнее tripscan вход
ссылка на сайт трип скан
рейтинг крипто БК рейтинг крипто БК
строительная техника Volvo http://www.tech-group.com.ua
I like your quality that you put into your writing . Please do continue with more like this.
интернет https://soulestate.ru/catalog-object/
Os clipes de max win do Ganesha Gold enganam — sessão média é bem mais calma.
нажмите здесь сайт трип скан
нажмите трипскан ссылка
здесь сайт трип скан
I have to disagree with most of the comments here, but maybe I’m just a contrarian.
Главная tripscan сайт
Wild Bandito não me deve nada.
Semana fria no Ganesha Gold.
читать tripscan официальный сайт
такой трипскан ссылка
Os regulares fixou o tópico de regras de banca. Finalmente.
Смотреть здесь сайт трипскан
Depósito em brl caiu em menos de 3 minutos — esse é o padrão novo.
Variância do Medusa II parece média até deixar de parecer. Aí lembra que é alta vol.
Raider Jane’s Crypt of Fortune pagou bem hoje, sem firula.
Saque pendente há 36h. Já tá irritando.
Butterfly Blossom só caiu o bônus no giro 412 — antes disso, nada.
Easily, the post is really the greatest on this laudable topic. I concur with your conclusions and will thirstily look forward to your future updates. Saying thank will not just be sufficient, for the wonderful c lucidity in your writing. I will instantly grab your rss feed to stay privy of any updates. Solid work and much success in your business enterprise!
Ayr?ca, eger winnie the pooh karakterleri konusuyla ilgileniyorsan?z, suraya bir goz at?n. Link burada: https://toyshikaye.com/articles/winnie-the-pooh-cizgi-film-karakterleri/
пояснения https://soulestate.ru/
Mais alguém sente que o Fortune Tiger apertou depois do update?
Suporte respondeu em 4 minutos. Volto nesse cassino.
Subi R$2k. Tô fora.
Источник tripscan зеркало
O veterano calado parou de jogar Lucky Neko depois do patch do Q1. Voltou semana passada. Outro jogo agora, ele diz.
WoW decent article. Can I hire you to guest write for my blog? If so send me an email!
нажмите, чтобы подробнее трип скан
проверить сайт https://soulestate.ru/catalog-object/
узнать больше Здесь трипскан сайт вход
посмотреть на этом сайте сайт трип скан
Tried it but it’s not really clicking for me just yet, seems ok so far but gonna give it more time before I make up my mind. dream catcher evolution has potential and the interface is pretty clean atleast, so maybe it’ll grow on me eventually.
O Lucky Neko tá pagando melhor que o Fortune Tiger essa semana ou eu tô tiltado?
A variância do Wild Wild Riches bateu diferente hoje.
перенаправляется сюда https://soulestate.ru/catalog/kp/landshaft67022/
сервисный центр тойота сервисный центр тойота
выберите ресурсы сайт трипскан
посетить веб-сайт tripscan сайт
узнать больше https://soulestate.ru/catalog/novostroiki/obydenskiy-166966/
продолжить трип скан официальный сайт
этот сайт трипскан вход
phuket condos for sale phuket condos for sale
крипто букмекерские конторы крипто букмекерские конторы
Перейти на сайт трипскан ссылка
заказать кухню в спб от производителя недорого заказать кухню в спб от производителя недорого
посетить веб-сайт tripscan сайт
ленинградские кухни https://kuhni-spb-59.ru
страница трипскан официальный сайт
Caminar por una ciudad nueva con maletas a cuestas es uno de los mayores frenos para el turismo, especialmente en lugares сon tanto por ver como Buenos Aires o Ciudad de Mexico.
La respuesta es simple: la comodidad permite una conexion mas profunda con el entorno. Estas herramientas modernas facilitan que cada minuto de la estadia se aproveche al maximo, permitiendo visitar museos, cafes и monumentos sin barreras.
Si les interesa mejorar su proximo viaje, miren estos recursos sobre almacenamiento и movilidad:
Post https://forumszkolne.pl/191por-que-el-equipaje-limita-la-exploracion-urbana-t110299.0.html
?Disfruten la ciudad sin cargas pesadas!
ссылка на сайт трипскан ссылка
Sessão de sexta. Servidor lotado.
Quanto tempo vocês dão pro Lucky Neko antes de rotacionar?
สล็อตเว็บตรง
ระบบสล็อตออนไลน์รุ่นใหม่กำลังขยับออกจากระบบเกมหมุนวงล้อคลาสสิกไปสู่แพลตฟอร์มดิจิทัลที่ขับเคลื่อนด้วย API และใช้โครงสร้าง API แบบเรียลไทม์ร่วมกับระบบหลังบ้านที่ตอบสนองรวดเร็ว ผู้เล่นจำนวนมากเริ่มหันมาใช้แพลตฟอร์มสล็อตเว็บตรง เพราะระบบมีความเสถียรมากกว่า และช่วยลดปัญหาการดีเลย์ การค้างของเกม รวมถึงการเชื่อมต่อการเงินที่ไม่เสถียร
โครงสร้างสล็อต API ตรงจะรับส่งข้อมูลกับค่ายเกมหลักผ่านระบบเชื่อมต่อแบบเรียลไทม์ ทำให้สถานะเกมและยอดเงินถูกส่งแบบทันทีโดยไม่ต้องผ่านโครงสร้างที่เพิ่มความหน่วง ส่งผลให้เกมโหลดเร็วขึ้น ลดข้อผิดพลาดของระบบโบนัส และช่วยให้ระบบฟรีสปินทำงานได้เสถียรมากขึ้น
สิ่งที่ทำให้แพลตฟอร์มยุคใหม่แตกต่างคือระบบฝากถอนอัตโนมัติ ผู้เล่นสามารถฝากถอนเงินได้ตลอดโดยไม่จำกัดช่วงเวลา โดยไม่จำเป็นต้องรอแอดมินตรวจสอบเหมือนแพลตฟอร์มที่ยังใช้การตรวจสอบด้วยคน ทำให้การฝากถอนระหว่างเล่นมีความต่อเนื่องกว่าเดิม
เหตุผลหลักที่ผู้เล่นเลือกสล็อตเว็บตรงคือความมั่นใจในผลลัพธ์และความต่อเนื่องของเซิร์ฟเวอร์ เซิร์ฟเวอร์ที่ทำงานร่วมกับ API หลักของค่ายเกมช่วยลดความไม่แน่นอนของระบบตัวกลาง ผู้เล่นจึงเชื่อถือได้ว่าผลลัพธ์ของเกมมาจากอัลกอริทึมต้นทาง
เมื่อดูในแง่ประสบการณ์ผู้ใช้ เว็บสมัยใหม่ยังมีการพัฒนาระบบแสดงผลบนสมาร์ตโฟนโดยเฉพาะ เช่น หน้าจอที่ออกแบบให้ใช้มือเดียวได้สะดวก การโหลดหน้าแบบ Dynamic และระบบ Auto Resumeที่ช่วยคืนสถานะเกมเมื่อการเชื่อมต่อมีปัญหา
แพลตฟอร์มสล็อตยุคใหม่เริ่มใช้AI วิเคราะห์ข้อมูล ร่วมกับเซิร์ฟเวอร์คลาวด์ที่ขยายตัวได้และการเชื่อมต่อข้อมูลอัตโนมัติเพื่อรองรับการเล่นต่อเนื่องของผู้เล่นหลายกลุ่ม บางระบบยังรองรับBlockchainเพื่อเพิ่มความปลอดภัยของข้อมูลและลดการพึ่งพาช่องทางการเงินแบบเก่า
ตลาดสล็อตออนไลน์จึงกำลังเปลี่ยนจากระบบเกมออนไลน์แบบเก่าไปสู่ระบบเทคโนโลยีเต็มรูปแบบ โดยคุณภาพเซิร์ฟเวอร์และความแม่นยำของธุรกรรมกลายเป็นปัจจัยสำคัญในการตัดสินใจใช้งานเว็บสล็อต
เมื่อการแข่งขันสูงขึ้นแพลตฟอร์มสล็อตจะยิ่งแข่งขันกันด้านคุณภาพ APIมากขึ้น ไม่ว่าจะเป็นการตอบสนองของหน้าเกม ระบบ AI วิเคราะห์พฤติกรรมผู้เล่น หรือการป้องกันข้อมูลส่วนตัว ผู้ให้บริการที่มีโครงสร้างเทคนิคที่รองรับโหลดสูงและเชื่อมต่อกับค่ายเกมโดยตรงจะแข่งขันได้แข็งแรงกว่าเว็บทั่วไปที่ยังใช้ระบบตรวจสอบที่ไม่อัตโนมัติเต็มรูปแบบ
คนที่เลือกแพลตฟอร์มอย่างจริงจังจึงไม่ได้มองแค่ของแจกอีกต่อไป แต่เริ่มให้ความสำคัญกับมาตรฐานทางเทคนิคของแพลตฟอร์ม ความต่อเนื่องของระบบการเงิน และเสถียรภาพของแพลตฟอร์มระหว่างการเล่นจริง
пояснения tripscan официальный сайт
Uma conta que sigo fez um print da banca subindo no Prosperity Gods Book e mandou no grupo. Galera aplaudiu.
на этом сайте трип скан вход
заказать кухню по своим размерам заказать кухню по своим размерам
Подробнее трипскан сайт вход
автоматические рулонные шторы с электроприводом автоматические рулонные шторы с электроприводом
trusted casino malaysia trusted casino malaysia
Подробнее tripscan официальный сайт
Melhor horário pra jogar Medusa II no fim de semana — alguém tem dado real?
Смотреть здесь tripscan вход
узнать больше Здесь трипскан вход
другие tripscan официальный сайт
здесь трипскан ссылка
A variância do Dim Sum Prize bateu diferente fim do mês.
O veterano calado chamou o Fortune Rabbit de “o único honesto” — meio brincando, meio não.
узнать больше трип скан
Bônus do Butterfly Blossom bateu mais ou menos a cada 200-300 giros na minha amostra. Pode variar.
Been using 69ca for a bit now and i like how simple the whole thing is, no annoying pop-ups every 5 seconds which is awsome, only minor thing is the support chat took a while to respond but eventually they got back to me
Смотреть здесь https://t.me/s/mounjaro_tirzepatide
выберите ресурсы https://t.me/s/mounjaro_tirzepatide
читать https://t.me/s/mounjaro_tirzepatide
посетить веб-сайт https://t.me/s/mounjaro_tirzepatide
смотреть здесь https://t.me/s/mounjaro_tirzepatide/
нажмите, чтобы подробнее https://t.me/s/mounjaro_tirzepatide/
этот сайт https://t.me/s/mounjaro_tirzepatide/
фан спорт бк фан спорт бк
laguna phuket apartments for sale laguna phuket apartments for sale
кухни на заказ от производителя кухни на заказ от производителя
кухни спб кухни спб
узнать больше Здесь https://t.me/s/mounjaro_tirzepatide/
интернет https://t.me/s/mounjaro_tirzepatide/
узнать больше https://t.me/s/mounjaro_tirzepatide
продолжить https://t.me/s/mounjaro_tirzepatide
узнать больше https://t.me/s/mounjaro_tirzepatide
опубликовано здесь https://t.me/s/mounjaro_tirzepatide
здесь https://t.me/s/mounjaro_tirzepatide/
Bônus no Wild Bandito. Fechei. Acabou.
перейдите на этот сайт https://t.me/s/mounjaro_tirzepatide
веб-сайт https://t.me/s/mounjaro_tirzepatide
этот сайт https://t.me/s/mounjaro_tirzepatide/
проверить сайт https://t.me/s/mounjaro_tirzepatide
здесь https://t.me/s/mounjaro_tirzepatide/
нажмите, чтобы подробнее https://t.me/s/mounjaro_tirzepatide/
нажмите https://t.me/s/mounjaro_tirzepatide
заказать кухню цена заказать кухню цена
online slot malaysia online slot malaysia
Sobrou R$30 da banca. Acabou.
рулонные шторы с электроприводом купить рулонные шторы с электроприводом купить
посетить сайт https://t.me/s/mounjaro_tirzepatide/
Buscas long-tail em Candy Bonanza ficaram mais específicas em 2026. Galera pede variância, não vibes.
посмотреть в этом разделе https://t.me/s/mounjaro_tirzepatide/
O veterano calado parou de jogar Lucky Neko depois do patch do Q1. Voltou semana passada. Outro jogo agora, ele diz.
ссылка на сайт https://t.me/s/mounjaro_tirzepatide/
каталог https://t.me/s/mounjaro_tirzepatide
нажмите, чтобы подробнее https://t.me/s/mounjaro_tirzepatide
узнать https://t.me/s/mounjaro_tirzepatide
перейдите на этот сайт https://t.me/s/mounjaro_tirzepatide
O cara de ti com a planilha fez um print da banca subindo no Butterfly Blossom e mandou no grupo. Galera aplaudiu.
веб-сайт https://t.me/s/mounjaro_tirzepatide
Best casino evar https://irwin-de.app/
в этом разделе https://soulestate.ru/catalog-object/
Источник https://t.me/s/mounjaro_tirzepatide/
Semana fria no Lucky Neko.
Banca preservada. Hoje deu pra dizer que ganhei.
100cuci bonus 100cuci bonus
выезд нарколога выезд нарколога
перейдите на этот сайт https://t.me/s/mounjaro_tirzepatide/
Loguei 1000 giros no Opera Dynasty. Os dados são chatos. Os bônus não.
перейти на сайт https://t.me/s/mounjaro_tirzepatide/
в этом разделе https://t.me/s/mounjaro_tirzepatide
кликните сюда https://t.me/s/mounjaro_tirzepatide/
A variância do Ganesha Gold bateu diferente hoje.
Bônus do Secrets of Cleopatra bateu mais ou menos a cada 200-300 giros na minha amostra. Pode variar.
содержание https://t.me/s/mounjaro_tirzepatide/
в этом разделе https://t.me/s/mounjaro_tirzepatide/
найти это https://t.me/s/mounjaro_tirzepatide
здесь https://soulestate.ru/catalog/kp/pavlovo-park76119/
Best casino evar https://cleobetra-kasino.com/
перейти на сайт https://t.me/s/mounjaro_tirzepatide/
Ninguém fala do Dim Sum Prize mas a taxa de hit é honestamente decente.
этот контент https://t.me/s/mounjaro_tirzepatide/
Os veteranos fixou o tópico de regras de banca. Finalmente.
кухня на заказ спб кухня на заказ спб
кухни под заказ кухни под заказ
22bet регистрация 22bet регистрация
phuket thailand apartments for sale phuket thailand apartments for sale
A enfermeira do plantão noturno jura por cripto pra saque rápido nas sessões de Ratinho.
веб-сайте https://t.me/s/mounjaro_tirzepatide/
подробнее https://t.me/s/mounjaro_tirzepatide/
опубликовано здесь https://soulestate.ru/catalog/vtorichnoe-jilio/knightsbridge-private-park66422/
другие https://t.me/s/mounjaro_tirzepatide/
Подробнее здесь https://t.me/s/mounjaro_tirzepatide/
сюда https://t.me/s/mounjaro_tirzepatide/
рулонные шторы жалюзи на окна https://rulonnye-shtory-s-elektroprivodom10.ru
100cuci slot 100cuci slot
Смотреть здесь https://t.me/s/mounjaro_tirzepatide/
Best casino evar https://winnerzcasino1.com/
перейдите на этот сайт https://t.me/s/mounjaro_tirzepatide
100cuci masuk 100cuci masuk
другие https://t.me/s/mounjaro_tirzepatide
Fortune Gods tá pesado no celular ultimamente, sei lá por quê.
A streamer com 80 viewers jura por transferência bancária pra saque rápido nas sessões de Jewel Race Ganesha.
подробнее https://t.me/s/mounjaro_tirzepatide
выезд нарколога на дом выезд нарколога на дом
Clipe do dia: Dim Sum Prize.
посетить веб-сайт https://t.me/s/mounjaro_tirzepatide/
веб-сайт https://t.me/s/mounjaro_tirzepatide/
кухни спб на заказ кухни спб на заказ
где заказать кухню в спб https://kuhni-spb-59.ru
заказать кухню стоимость заказать кухню стоимость
22bet ставки 22bet ставки
здесь https://t.me/s/mounjaro_tirzepatide
посмотреть в этом разделе https://t.me/s/mounjaro_tirzepatide
100cuci free credit 100cuci free credit
страница https://t.me/s/mounjaro_tirzepatide
Подробнее https://t.me/s/mounjaro_tirzepatide
другие https://t.me/s/mounjaro_tirzepatide/
рулонные шторы на окна недорого https://rulonnye-shtory-s-elektroprivodom10.ru
condos for sale in phuket condos for sale in phuket
100cuci free kredit 100cuci free kredit
посетить сайт https://t.me/s/mounjaro_tirzepatide
Caishen Wins só caiu o bônus no giro 412 — antes disso, nada.
узнать больше https://t.me/s/mounjaro_tirzepatide/
выезд нарколога выезд нарколога
можно проверить ЗДЕСЬ https://t.me/s/mounjaro_tirzepatide/
Делал проводку в коттедже, обратился через https://electrics-mos.ru, всё сделали под ключ
Читать далее https://t.me/s/mounjaro_tirzepatide/
страница https://t.me/s/mounjaro_tirzepatide/
Главная https://t.me/s/mounjaro_tirzepatide/
нажмите здесь https://t.me/s/mounjaro_tirzepatide/
веб-сайте https://t.me/s/mounjaro_tirzepatide
кухни под заказ в спб кухни под заказ в спб
22bet официальный сайт 22bet официальный сайт
заказать кухню заказать кухню
кухни на заказ питер https://kuhni-spb-59.ru
Best casino evar https://millioner-de.com/
view publisher site https://tokvideodownloader.click/id/
check my reference https://tokvideodownloader.click/ru/
best site
cryptocurrency wordpress plugin
discover here
accepting crypto payments
image source
crypto payment api
important source https://tokvideodownloader.click/es/
check my source
cryptocurrency wordpress plugin
slot malaysia slot malaysia
check out the post right here
wordpress crypto plugin
this content
accept crypto on opencart
other
crypto payments api
use this link
crypto payment gateway api
More about the author
crypto plugin wordpress
see this https://tokvideodownloader.click/ru/
частный нарколог на дом частный нарколог на дом
Recommended Reading https://tokvideodownloader.click/bn/
try this https://tokvideodownloader.click/ar/
Get the facts
non custodial gateway
look here
torn payment api
Recommended Site https://tokvideodownloader.click/ru/
Our site https://tokvideodownloader.click/ja/
Get the facts
accept crypto coin
navigate here
pay cryptocurrency
click for info
crypto payment integration
use this link
crypto integration
this website
cryptocurrency payment
address
bitcoin payment api
laguna phuket apartments for sale laguna phuket apartments for sale
he has a good point https://tokvideodownloader.click/ar/
view it
wordpress crypto plugin
find out
pay with cryptocurrency
hop over to this web-site https://tokvideodownloader.click/ur/
888starz site https://888starz-eg-egypt3.com/
my site
api for crypto payments
pop over to these guys
payments crypto
check out this site
accept crypto coin
browse around this website
crypto plugin wordpress
website link https://tokvideodownloader.click/ja/
go to this site
accept cryptocurrency
go to this website https://tokvideodownloader.click/tr/
Perdi tudo. Assumi.
like this
pay in cryptocurrency
PIX hit in 6 seconds. Prosperity Gods Book can wait.
look at this website https://tokvideodownloader.click/tr/
check my site
crypto payment api
O motoboy de pinheiros colocou R$300 no Piggy Gold e saiu com R$120. Sem print, só contou.
Best casino evar https://gizbo-kasino.app/
22bet регистрация 22bet регистрация
O cara que parou de chasing em março jura por transferência bancária pra saque rápido nas sessões de Wild Bandito.
moved here
crypto payment integration
visit https://tokvideodownloader.click/es/
click now
accepting cryptocurrency
browse around these guys
payments crypto
why not check here
accepting crypto payments
have a peek at this web-site https://tokvideodownloader.click/fil/
over at this website
accept cryptocurrencies
that site https://tokvideodownloader.click/tr/
Full Report
cryptocurrency plugins for wordpress
see page https://tokvideodownloader.click/fa/
вызов нарколога вызов нарколога
A kid in recife stopped playing Dragon Hatch 2 after the Q1 patch. Came back last week. Different game now, he says.
click to read https://tokvideodownloader.click/tr/
webpage https://tokvideodownloader.click/ur/
from this source
crypto payment plugin wordpress
Discover More
ecommerce crypto payment plugin
wikipedia reference https://tokvideodownloader.click/bn/
you could check here https://tokvideodownloader.click/zh/
browse around this web-site
cryptocurrency wordpress plugins
have a peek at this web-site
crypto integration
try here https://tokvideodownloader.click/ja/
freehold condos for sale in phuket freehold condos for sale in phuket
Logged 500 spins on Wild Wild Riches. The data is boring. The bonus rounds are not.
more information
cryptocurrency wordpress plugin
this contact form
non custodial gateway
learn this here now https://tokvideodownloader.click/ja/
the original source https://www.onlyfake.org/
weblink
payment crypto
here are the findings
accept crypto on openCart
PIX caiu em 6 segundos. Ninja vs Samurai pode esperar.
content
non custodial gateway
Duas features seguidas no Fortune Rabbit.
Wizdom Wonders max-win clips are misleading — the average session is way calmer.
Website https://tokvideodownloader.click/fil/
A regular dropped R$50 on Mahjong Ways and walked out with R$2,400. No screenshot, just told us.
Tava evitando Fortune Dragon depois do patch, voltei essa semana, mesmo clima de antes.
browse around this site
accept crypto payment
Bonus buy on Piggy Gold only makes sense if base RTP is verified above 96.5%.
вызов нарколога на дом воронеж вызов нарколога на дом воронеж
look at here https://tokvideodownloader.click/am/
official website crypto payments
A teacher in salvador called Buffalo Win “the only honest one” — half joking, half not.
why not look here https://tokvideodownloader.click/ar/
useful source https://tokvideodownloader.click/vi/
you could try this out
crypto payment gateway api
best site
accept crypto payments
site https://tokvideodownloader.click/ru/
browse this site
crypto payment
Santa’s Gift Rush tá pesado no celular ultimamente, sei lá por quê.
look at this site
accept cryptocurrency
he has a good point
crypto payments api
Home Page
accept crypto payments
web link
accept crypto on opencart
see post
crypto plugin wordpress
this article
crypto integration
Best casino evar https://crowngreenkasino.com/
explanation
crypto payment system
hop over to here
pay with cryptocurrency
try this website
how to accept crypto payments
find here
solana payment api
read review
payments crypto
100 cuci 100 cuci
рулонные шторы на пластиковые окна купить https://elektricheskie-rulonnye-shtory99.ru
Our site
opencart cryptocurrency
why not try this out https://tokvideodownloader.click/es/
check this https://tokvideodownloader.click/ja/
best site
pay with crypto
this link
cryptocurrency wordpress plugins
Variância do Candy Bonanza parece média até deixar de parecer. Aí lembra que é alta vol.
important site
crypto payment solution
click for source
accept crypto payment
over at this website
cryptocurrency link for payment
see post https://tokvideodownloader.click/vi/
discover this info here https://tokvideodownloader.click/es/
Get More Information https://tokvideodownloader.click/fil/
22bet букмекерская контора 22bet букмекерская контора
A teacher in salvador called Candy Bonanza “the only honest one” — half joking, half not.
useful source
opencart crypto payment
What i discover troublesome is to find a weblog that may capture me for a minute however your blog is different. Bravo.
site https://tokvideodownloader.click/ar/
click here to read https://tokvideodownloader.click/ru/
page https://tokvideodownloader.click/am/
great post to read https://tokvideodownloader.click/ur/
Find Out More
crypto payment plugin
Candy Bonanza tá pesado no celular ultimamente, sei lá por quê.
The dad who deposits r$20 for his kid’s school stuff stopped playing Ninja vs Samurai after the Q1 patch. Came back last week. Different game now, he says.
i was reading this
crypto payment integration
Dois bônus seguidos no Secrets of Cleopatra, ambos uns 30x. Estranho.
If you don’t mind, where do you host your weblog? I am looking for a very good web host and your webpage seams to be extremely fast and up most the time…
Wild Wild Riches me deu green inesperado, kkkk não esperava.
Dim Sum Prize voltou pra rotação.
additional reading https://tokvideodownloader.click/zh/
нарколог на дом анонимно нарколог на дом анонимно
discover here https://www.onlyfake.org
Spreadsheet guys winning the long game.
A friend of mine advised me to review this site. And yes. it has some useful pieces of info and I enjoyed reading it.
This is definitely a wonderful webpage, thanks a lot..
Logged 1000 spins on Ninja vs Samurai. The data is boring. The bonus rounds are not.
pop over to this website https://tokvideodownloader.click/zh/
Piggy Gold again? the post-game thread won’t stop posting about it.
have a peek at these guys https://tokvideodownloader.click/ar/
useful reference https://tokvideodownloader.click/fa/
find here https://tokvideodownloader.click/fil/
check my source https://tokvideodownloader.click/zh/
Get the facts https://tokvideodownloader.click/hi/
look at this website https://www.onlyfake.org/
click over here now https://tokvideodownloader.click/ru/
Thanks pertaining to discussing the following superb written content on your site. I ran into it on the search engines. I will check back again if you publish extra aricles.
кухни на заказ петербург https://kuhni-spb-58.ru
learn the facts here now https://tokvideodownloader.click/bn/
phuket condos for sale phuket condos for sale
Hood vs Wolf só caiu o bônus no giro 412 — antes disso, nada.
Piggy Gold me deu green inesperado, kkkk não esperava.
dig this https://tokvideodownloader.click/fil/
вывод из запоя цены самара вывод из запоя цены самара
Tamanho da aposta a 1% da banca no Three Monkeys. Acima disso é jogatina, não jogo.
I think I will become a great follower.Just want to say your post is striking. The clarity in your post is simply striking and i can take for granted you are an expert on this subject.
PIX caiu em 6 segundos. Caishen Wins pode esperar.
Sweet Bonanza pagou bem hoje, sem firula.
Perdi R$1.2k. Sem chasing.
A streamer com 80 viewers fechou a sessão de Fortune Dragon no green, foi dormir. Disciplina simples assim.
additional resources https://www.onlyfake.org/
Your posts provide a clear, concise description of the issues.
Our site https://tokvideodownloader.click/hi/
Rotaciona a cada 200 giros. Fortune Rabbit não te deve um bônus.
click here for info https://tokvideodownloader.click/id/
check these guys out https://www.onlyfake.org/
site https://tokvideodownloader.click/vi/
A galera dos dados virou ambiente de debate, não de hype. 2026 é diferente.
this website https://tokvideodownloader.click/am/
Clipe do dia: Dim Sum Prize.
PIX demorou 6 minutos. Aceitável.
https://houseedge.us/casinos/online-casinos/
useful source https://tokvideodownloader.click/fil/
100cuci slot 100cuci slot
read the full info here https://tokvideodownloader.click/bn/
рольшторы заказать https://elektricheskie-rulonnye-shtory99.ru
find more information https://tokvideodownloader.click/am/
рулонные. шторы. +на. пластиковые. окна. купить. https://avtomaticheskie-rulonnye-shtory50.ru
get more https://tokvideodownloader.click/am/
important source https://tokvideodownloader.click/ru/
webpage https://tokvideodownloader.click/ar/
Home Page https://tokvideodownloader.click/hi/
Cinco sessões, uma boa. Esse é o Phoenix Rises pra você.
website link https://www.onlyfake.org
additional resources https://tokvideodownloader.click/es/
Cinco sessões, uma boa. Esse é o Dim Sum Prize pra você.
O mod que fixou o tópico do stop-loss colocou R$50 no Mahjong Ways 2 e saiu com R$300. Sem print, só contou.
O resumão de domingo mudou de clipe de hype pra dado de sessão real esse ano.
O estudante de direito parou de jogar Santa’s Gift Rush depois do patch do Q1. Voltou semana passada. Outro jogo agora, ele diz.
A streamer com 80 viewers jura por transferência bancária pra saque rápido nas sessões de Jewel Race Ganesha.
visit this site right here https://www.onlyfake.org
Clipes de hype morrendo. Finalmente.
100cuci link 100cuci link
Best casino evar https://pandido-de.com/
Fortune Ox tá pesado no celular ultimamente, sei lá por quê.
villas for sale in phuket island villas for sale in phuket island
https://winradar.us/casinos/online-casinos/
Bônus do Lucky Neko bateu mais ou menos a cada 200-300 giros na minha amostra. Pode variar.
why not try here https://tokvideodownloader.click/am/
click site https://tokvideodownloader.click/ar/
O cara de ti com a planilha parou de jogar Diamond Cascade depois do patch do Q1. Voltou semana passada. Outro jogo agora, ele diz.
вызов нарколога вызов нарколога
посетить веб-сайт document creation platform
A streamer com 80 viewers jura por transferência bancária pra saque rápido nas sessões de Jewel Race Ganesha.
phuket condos for sale phuket condos for sale
сколько стоит капельница от похмелья https://kapelnicza-ot-pokhmelya-samara-23.ru
Pulando Wild Bandito até o próximo patch.
Tava evitando Raider Jane’s Crypt of Fortune depois do patch, voltei essa semana, mesmo clima de antes.
you can look here
save from tiktok
Best casino evar https://kingmaker-1.com/
Os clipes de max win do Ganesha Gold enganam — sessão média é bem mais calma.
рулонные жалюзи купить в москве рулонные жалюзи купить в москве
https://punbb.skynettechnologies.us/profile.php?id=153999
A enfermeira do plantão noturno parou de jogar Diamond Cascade depois do patch do Q1. Voltou semana passada. Outro jogo agora, ele diz.
Tamanho da aposta a 1% da banca no Dragon Hatch 2. Acima disso é jogatina, não jogo.
взгляните на сайте здесь high quality document templates
A variância do Three Monkeys bateu diferente depois da meia-noite.
Maratona de fim de semana. Má ideia.
пояснения onlyfake online service
ссылка на сайт https://ufolabs.xyz/
Best casino evar https://allyspin-kasino.com/
узнать больше https://ufolabs.cc
Define o alvo antes de abrir Wild Bandito. Bateu, sai. Não tem negociação.
этот сайт onlyfake платформа
see here
save tiktok video
кухни в спб от производителя кухни в спб от производителя
Best casino evar https://spinrollz-kasino.com/
читать https://ufolabs.io
лечение наркомании на дому https://narkolog-na-dom-voronezh-12.ru
phuket villas for sale thailand phuket villas for sale thailand
trusted casino malaysia trusted casino malaysia
здесь https://ufolabs.io
If you need an efficient AI solution, take a look at this one: https://chatgpt.com/g/g-6a0c744c41608191956cca0fad1a25aa-ai-homework-helper-personal-academic-tutor .
You should definitely explore this powerful AI instrument: [url]https://chatgpt.com/g/g-6a0c701da6988191857d94c471108825-humanizador-de-texto-ia-formato-humano-gratis[/url] .
ссылка на сайт onlyfake official website
узнать больше шаблоны документов
интернет online document generator
зайти на сайт onlyfake онлайн генерация
I dont think Ive caught all the angles of this subject the way youve pointed them out. Youre a true star, a rock star man. Youve got so much to say and know so much about the subject that I think you should just teach a class about it
Перейти на сайт realistic digital documents
капельница от похмелья самара капельница от похмелья самара
рулонные шторы виды механизмов рулонные шторы виды механизмов
thailand phuket apartments for sale thailand phuket apartments for sale
my latest blog post
download audio tiktok
прокапать от алкоголя прокапать от алкоголя
try this website
download story tiktok
вывод из запоя в стационаре анонимно вывод из запоя в стационаре анонимно
Also, I highly recommend checking out this AI tool: https://chatgpt.com/g/g-6a0cae05ea84819194c23497e30e6b26-ai-text-watermark-remover-clean-editor .
You should definitely explore this powerful AI instrument: [url]https://chatgpt.com/g/g-6a0caf823b7881919678e14a4460fd90-text-improver-professional-essay-paraphraser[/url] .
official statement
download video tiktok mp3
This is one very informative blog. I like the way you write and I will bookmark your blog to my favorites.
вывод из запоя вывод из запоя
from this source
download tiktok without watermark
кухни на заказ петербург https://kuhni-spb-58.ru
100cuci bonus 100cuci bonus
рулонные шторы на окно в кухне https://elektricheskie-rulonnye-shtory99.ru
luxury villas in phuket for sale luxury villas in phuket for sale
Licença Curaçao no rodapé? Bom. Nada no rodapé? Passa.
нарколог на дом цена воронеж https://narkolog-na-dom-voronezh-12.ru
Compra de bônus no Fortune Tiger só faz sentido se o RTP base passar 96.5%.
O estudante de direito perdeu R$420 fazendo chasing no Opera Dynasty, postou o comprovante, assumiu. Respeito.
“PIX instantâneo cassino” virou o filtro número um nas reviews de plataforma 2026.
Os veteranos fixou o tópico de regras de banca. Finalmente.
O resumão de domingo mudou de clipe de hype pra dado de sessão real esse ano.
В нашем магазине можно найти красивые подарки и украшения для приятного сюрприза. В каталоге есть изящные аксессуары, которые подойдут для корпоратива.
Если хочется сделать приятный сюрприз, стоит обратить внимание на декоративные изделия. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken рабочая ссылка onion
Наш магазин можно подобрать красивые подарки и украшения для любого случая. В каталоге есть подарочные наборы, которые подойдут для корпоратива.
Если хочется сделать приятный сюрприз, стоит обратить внимание на браслеты. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для мамы, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
kraken онион тор
для рулонных штор https://rulonnye-elektroshtory.ru
В нашем магазине можно подобрать красивые подарки и украшения для любого случая. В каталоге есть женские украшения, которые подойдут для юбилея.
Если хочется сделать приятный сюрприз, стоит обратить внимание на серьги. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит внимание к деталям. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken сайт зеркала
У нас можно подобрать необычные подарки и украшения для любого случая. В каталоге есть сувениры, которые подойдут для корпоратива.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на декоративные изделия. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
сайт kraken darknet
У нас можно заказать стильные подарки и украшения для любого случая. В каталоге есть милые мелочи, которые подойдут для дня рождения.
Если хочется порадовать близкого человека, стоит обратить внимание на браслеты. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит внимание к деталям. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
кракен onion сайт
Наш магазин можно найти оригинальные подарки и украшения для праздника. В каталоге есть милые мелочи, которые подойдут для юбилея.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на декоративные изделия. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для подруги, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken ссылка тор
В нашем магазине можно подобрать красивые подарки и украшения для важного события. В каталоге есть милые мелочи, которые подойдут для корпоратива.
Если хочется порадовать близкого человека, стоит обратить внимание на декоративные изделия. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит внимание к деталям. Здесь легко выбрать подарок для мамы, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
kraken онион
O mod que fixou o tópico do stop-loss jura por PIX pra saque rápido nas sessões de Leprechaun Riches.
В нашем магазине можно найти стильные подарки и украшения для приятного сюрприза. В каталоге есть подарочные наборы, которые подойдут для свадьбы.
Если хочется сделать приятный сюрприз, стоит обратить внимание на подарочные композиции. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит внимание к деталям. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken onion
A professora de salvador colocou R$100 no Fortune Gods e saiu com R$120. Sem print, só contou.
Voltei pro Fortune Ox. Por quê.
У нас можно найти красивые подарки и украшения для праздника. В каталоге есть сувениры, которые подойдут для романтического вечера.
Если хочется сделать приятный сюрприз, стоит обратить внимание на браслеты. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит внимание к деталям. Здесь легко выбрать подарок для мамы, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
kraken ссылка на сайт
888starz deposit http://www.888starz-uz3.com/ .
88starz bet http://www.888starz-kirish4.com/ .
Наш магазин можно заказать необычные подарки и украшения для важного события. В каталоге есть милые мелочи, которые подойдут для дня рождения.
Если хочется порадовать близкого человека, стоит обратить внимание на декоративные изделия. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит внимание к деталям. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
kraken ссылка зеркало
нарколог на дому капельница цена нарколог на дому капельница цена
У нас можно заказать оригинальные подарки и украшения для приятного сюрприза. В каталоге есть женские украшения, которые подойдут для дня рождения.
Если хочется порадовать близкого человека, стоит обратить внимание на подарочные композиции. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken ссылка зеркало
У нас можно подобрать красивые подарки и украшения для приятного сюрприза. В каталоге есть милые мелочи, которые подойдут для корпоратива.
Если хочется порадовать близкого человека, стоит обратить внимание на кольца. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для мамы, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
kraken онион тор
Ninguém fala do Jungle Delight mas a taxa de hit é honestamente decente.
Наш магазин можно найти стильные подарки и украшения для приятного сюрприза. В каталоге есть милые мелочи, которые подойдут для романтического вечера.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на серьги. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для мамы, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
kraken зеркало рабочее
Наш магазин можно подобрать необычные подарки и украшения для любого случая. В каталоге есть женские украшения, которые подойдут для дня рождения.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на браслеты. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
кракен даркнет
У нас можно подобрать оригинальные подарки и украшения для любого случая. В каталоге есть изящные аксессуары, которые подойдут для свадьбы.
Если хочется сделать приятный сюрприз, стоит обратить внимание на декоративные изделия. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
kraken onion
Наш магазин можно найти оригинальные подарки и украшения для любого случая. В каталоге есть милые мелочи, которые подойдут для свадьбы.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на декоративные изделия. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит внимание к деталям. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken зеркало рабочее
“en yeni oyuncaklar” hakk?nda bilgi arayanlar icin mukemmel bir kaynak var. Link burada: https://toyshayal.com/2023-popular-toys/
врач капельница алкоголь на дом https://vyvod-iz-zapoya-na-domu-sankt-peterburg-19.ru
капельница от запоя стоимость https://kapelnicza-ot-pokhmelya-samara-23.ru
У нас можно заказать оригинальные подарки и украшения для важного события. В каталоге есть милые мелочи, которые подойдут для романтического вечера.
Если хочется сделать приятный сюрприз, стоит обратить внимание на подарочные композиции. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
kraken ссылка зеркало
В нашем магазине можно найти красивые подарки и украшения для праздника. В каталоге есть подарочные наборы, которые подойдут для юбилея.
Если хочется порадовать близкого человека, стоит обратить внимание на декоративные изделия. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
kraken ссылка зеркало
В нашем магазине можно найти красивые подарки и украшения для важного события. В каталоге есть подарочные наборы, которые подойдут для юбилея.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на серьги. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
kraken darknet market
В нашем магазине можно найти необычные подарки и украшения для приятного сюрприза. В каталоге есть женские украшения, которые подойдут для свадьбы.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на кольца. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для подруги, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
кракен онион
888starz. 888starz..
В нашем магазине можно заказать необычные подарки и украшения для любого случая. В каталоге есть изящные аксессуары, которые подойдут для юбилея.
Если хочется сделать приятный сюрприз, стоит обратить внимание на декоративные изделия. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
кракен онион тор
88 stars https://eg888starz-bet.com/
Quanto tempo vocês dão pro Touro antes de rotacionar?
В нашем магазине можно подобрать необычные подарки и украшения для любого случая. В каталоге есть милые мелочи, которые подойдут для корпоратива.
Если хочется сделать приятный сюрприз, стоит обратить внимание на подарочные композиции. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
kraken ссылка зеркало
Наш магазин можно найти стильные подарки и украшения для любого случая. В каталоге есть подарочные наборы, которые подойдут для юбилея.
Если хочется порадовать близкого человека, стоит обратить внимание на браслеты. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для подруги, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
кракен ссылка
apartments in phuket for sale apartments in phuket for sale
В нашем магазине можно подобрать красивые подарки и украшения для важного события. В каталоге есть сувениры, которые подойдут для корпоратива.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на декоративные изделия. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для мамы, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
kraken официальные ссылки
Pós-salário. Disciplina testada.
O veterano calado parou de jogar Lucky Neko depois do patch do Q1. Voltou semana passada. Outro jogo agora, ele diz.
A conta nova que não para de postar colocou R$500 no Fortune Gods e saiu com R$2.400. Sem print, só contou.
В нашем магазине можно найти стильные подарки и украшения для важного события. В каталоге есть милые мелочи, которые подойдут для дня рождения.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на серьги. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken онион тор
Vale a pena comprar bônus no Fortune Tiger ou espera natural compensa mais?
У нас можно подобрать необычные подарки и украшения для важного события. В каталоге есть изящные аксессуары, которые подойдут для дня рождения.
Если хочется сделать приятный сюрприз, стоит обратить внимание на браслеты. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
kraken сайт зеркала
Наш магазин можно заказать стильные подарки и украшения для праздника. В каталоге есть изящные аксессуары, которые подойдут для корпоратива.
Если хочется сделать приятный сюрприз, стоит обратить внимание на браслеты. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для мамы, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken onion ссылка
В нашем магазине можно подобрать красивые подарки и украшения для любого случая. В каталоге есть женские украшения, которые подойдут для корпоратива.
Если хочется порадовать близкого человека, стоит обратить внимание на подарочные композиции. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kra ссылка
В нашем магазине можно подобрать стильные подарки и украшения для праздника. В каталоге есть подарочные наборы, которые подойдут для дня рождения.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на подвески. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
кракен onion
Opera Dynasty pagou bem hoje, sem firula.
В нашем магазине можно заказать оригинальные подарки и украшения для праздника. В каталоге есть милые мелочи, которые подойдут для корпоратива.
Если хочется порадовать близкого человека, стоит обратить внимание на декоративные изделия. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
kraken ссылка зеркало
В нашем магазине можно найти необычные подарки и украшения для приятного сюрприза. В каталоге есть изящные аксессуары, которые подойдут для корпоратива.
Если хочется сделать приятный сюрприз, стоит обратить внимание на декоративные изделия. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
кракен onion сайт
Вызов капельницы от похмелья с контролем врача в Самаре рекомендуется, когда симптомы похмелья становятся особенно тяжелыми и мешают нормальной жизнедеятельности. Несмотря на то, что многие пытаются справиться с похмельем с помощью домашних методов, такие как прием жидкости или таблеток, они не всегда оказываются достаточно эффективными. В случае сильных симптомов похмелья, капельница с врачебным контролем — это более безопасное и быстрое решение, при этом возможен вывод в стационаре, анонимное лечение и консультации по вопросам наркомании с учетом актуальной цены услуг.
Узнать больше – капельница от похмелья вызов на дом самара
запой стационар https://vyvod-iz-zapoya-v-staczionare-nizhnij-novgorod-16.ru
автоматическая рулонная штора автоматическая рулонная штора
Наш магазин можно заказать оригинальные подарки и украшения для любого случая. В каталоге есть изящные аксессуары, которые подойдут для корпоратива.
Если хочется сделать приятный сюрприз, стоит обратить внимание на декоративные изделия. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
kraken онион тор
Наш магазин можно заказать красивые подарки и украшения для приятного сюрприза. В каталоге есть сувениры, которые подойдут для свадьбы.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на декоративные изделия. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для подруги, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
kraken ссылка тор
Наш магазин можно найти оригинальные подарки и украшения для важного события. В каталоге есть сувениры, которые подойдут для романтического вечера.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на браслеты. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит внимание к деталям. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
кракен ссылка onion
Наш магазин можно подобрать оригинальные подарки и украшения для любого случая. В каталоге есть изящные аксессуары, которые подойдут для свадьбы.
Если хочется сделать приятный сюрприз, стоит обратить внимание на браслеты. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит внимание к деталям. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
kraken онион
У нас можно подобрать необычные подарки и украшения для любого случая. В каталоге есть милые мелочи, которые подойдут для дня рождения.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на декоративные изделия. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken onion ссылка
В нашем магазине можно заказать необычные подарки и украшения для праздника. В каталоге есть сувениры, которые подойдут для корпоратива.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на кольца. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит внимание к деталям. Здесь легко выбрать подарок для подруги, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
кракен darknet
купить рулонные шторы москва купить рулонные шторы москва
Наш магазин можно заказать стильные подарки и украшения для праздника. В каталоге есть изящные аксессуары, которые подойдут для юбилея.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на браслеты. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
kraken зеркало
У нас можно заказать стильные подарки и украшения для праздника. В каталоге есть изящные аксессуары, которые подойдут для дня рождения.
Если хочется сделать приятный сюрприз, стоит обратить внимание на серьги. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для подруги, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken ссылка тор
В нашем магазине можно заказать красивые подарки и украшения для приятного сюрприза. В каталоге есть подарочные наборы, которые подойдут для дня рождения.
Если хочется сделать приятный сюрприз, стоит обратить внимание на подвески. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
kraken darknet ссылка
В нашем магазине можно найти красивые подарки и украшения для важного события. В каталоге есть сувениры, которые подойдут для свадьбы.
Если хочется порадовать близкого человека, стоит обратить внимание на кольца. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
kraken актуальные ссылки
В нашем магазине можно заказать необычные подарки и украшения для любого случая. В каталоге есть сувениры, которые подойдут для юбилея.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на браслеты. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
kraken актуальные ссылки
Наш магазин можно заказать стильные подарки и украшения для праздника. В каталоге есть подарочные наборы, которые подойдут для свадьбы.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на декоративные изделия. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для подруги, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken darknet ссылка
современные кухни на заказ в спб https://kuhni-spb-58.ru
100cuci pragmatic 100cuci pragmatic
villas phuket for sale villas phuket for sale
вывод из запоя цена вывод из запоя цена
Наш магазин можно найти оригинальные подарки и украшения для любого случая. В каталоге есть женские украшения, которые подойдут для романтического вечера.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на серьги. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
кракен онион тор
Наш магазин можно найти красивые подарки и украшения для любого случая. В каталоге есть изящные аксессуары, которые подойдут для дня рождения.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на кольца. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для подруги, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
kra ссылка
сколько стоит капельница от запоя сколько стоит капельница от запоя
Наш магазин можно заказать стильные подарки и украшения для праздника. В каталоге есть изящные аксессуары, которые подойдут для романтического вечера.
Если хочется порадовать близкого человека, стоит обратить внимание на декоративные изделия. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
кракен онион тор
В нашем магазине можно подобрать необычные подарки и украшения для праздника. В каталоге есть сувениры, которые подойдут для романтического вечера.
Если хочется порадовать близкого человека, стоит обратить внимание на кольца. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
kraken рабочая ссылка onion
капельница от похмелья в воронеже капельница от похмелья в воронеже
Наш магазин можно заказать стильные подарки и украшения для важного события. В каталоге есть милые мелочи, которые подойдут для корпоратива.
Если хочется порадовать близкого человека, стоит обратить внимание на серьги. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken darknet
В нашем магазине можно найти необычные подарки и украшения для важного события. В каталоге есть изящные аксессуары, которые подойдут для свадьбы.
Если хочется порадовать близкого человека, стоит обратить внимание на кольца. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для подруги, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
kraken онион
Наш магазин можно заказать стильные подарки и украшения для приятного сюрприза. В каталоге есть милые мелочи, которые подойдут для романтического вечера.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на подарочные композиции. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти приятную мелочь. Подарки и украшения помогают выразить внимание без лишних слов.
сайт kraken darknet
Наш магазин можно подобрать оригинальные подарки и украшения для приятного сюрприза. В каталоге есть милые мелочи, которые подойдут для юбилея.
Если хочется выбрать что-то запоминающееся, стоит обратить внимание на подарочные композиции. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken darknet
my response
safe wallet app security
Наш магазин можно подобрать стильные подарки и украшения для праздника. В каталоге есть сувениры, которые подойдут для юбилея.
Если хочется порадовать близкого человека, стоит обратить внимание на подвески. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
kraken ссылка зеркало
Наш магазин можно найти оригинальные подарки и украшения для любого случая. В каталоге есть женские украшения, которые подойдут для романтического вечера.
Если хочется порадовать близкого человека, стоит обратить внимание на подвески. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
кракен ссылка onion
В нашем магазине можно заказать красивые подарки и украшения для любого случая. В каталоге есть изящные аксессуары, которые подойдут для юбилея.
Если хочется порадовать близкого человека, стоит обратить внимание на декоративные изделия. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для любимого человека, не тратя время на бесконечные поиски.
Каталог пополняется интересными товарами, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
кракен онион зеркало
Наш магазин можно найти оригинальные подарки и украшения для важного события. В каталоге есть изящные аксессуары, которые подойдут для романтического вечера.
Если хочется порадовать близкого человека, стоит обратить внимание на браслеты. Такие вещи выглядят дорого и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для подруги, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
kraken сайт
У нас можно подобрать стильные подарки и украшения для любого случая. В каталоге есть милые мелочи, которые подойдут для корпоратива.
Если хочется сделать приятный сюрприз, стоит обратить внимание на кольца. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Магазин подарков и украшений предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для мамы, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
кракен ссылка kraken
Наш магазин можно заказать красивые подарки и украшения для праздника. В каталоге есть подарочные наборы, которые подойдут для юбилея.
Если хочется сделать приятный сюрприз, стоит обратить внимание на браслеты. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит качество. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
кракен ссылка kraken
В нашем магазине можно заказать необычные подарки и украшения для приятного сюрприза. В каталоге есть изящные аксессуары, которые подойдут для корпоратива.
Если хочется сделать приятный сюрприз, стоит обратить внимание на декоративные изделия. Такие вещи создают настроение и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит внимание к деталям. Здесь легко выбрать подарок для девушки, не тратя время на бесконечные поиски.
Ассортимент регулярно обновляется, поэтому каждый покупатель может найти интересную идею. Подарки и украшения помогают выразить внимание без лишних слов.
kraken онион
Наш магазин можно подобрать оригинальные подарки и украшения для важного события. В каталоге есть милые мелочи, которые подойдут для романтического вечера.
Если хочется сделать приятный сюрприз, стоит обратить внимание на подвески. Такие вещи подчеркивают вкус и помогают сделать подарок действительно особенным.
Каталог украшений и сувениров предлагает товары для тех, кто ценит красоту. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти подходящий вариант. Подарки и украшения помогают выразить внимание без лишних слов.
kraken onion ссылка
В нашем магазине можно заказать необычные подарки и украшения для любого случая. В каталоге есть женские украшения, которые подойдут для свадьбы.
Если хочется порадовать близкого человека, стоит обратить внимание на подвески. Такие вещи запоминаются надолго и помогают сделать подарок действительно особенным.
Интернет-магазин подарков предлагает товары для тех, кто ценит оригинальность. Здесь легко выбрать подарок для коллеги, не тратя время на бесконечные поиски.
В продаже появляются новые позиции, поэтому каждый покупатель может найти что-то свежее. Подарки и украшения помогают выразить внимание без лишних слов.
актуальные зеркала kraken
электропривод рулонных штор электропривод рулонных штор
Great post. I was checking constantly this blog and I’m impressed! Very useful info specifically the last part 🙂 I care for such info much. I was looking for this certain information for a very long time. Thank you and good luck.
You are one talented writer thank you for the post.
We’re developing a conference, and it looks like you would be a great speaker.
Great blog here! Additionally your website rather a lot up very fast! What host are you the usage of? Can I get your associate link for your host? I desire my website loaded up as fast as yours lol
прокапаться прокапаться
купить турпутевку в санкт петербург http://www.piter-na-teplohode.ru
have a peek at this web-site
sei network wallet access
luxury villas in phuket thailand for sale luxury villas in phuket thailand for sale
I do not even know how I ended up here, but I thought this post was good. I do not know who you are but certainly you are going to a famous blogger if you are not already 😉 Cheers!
I think this is among the so much vital info for me. And i’m happy reading your article. But wanna remark on few common issues, The site style is wonderful, the articles is really excellent : D. Just right job, cheers
Pulei Sweet Bonanza hoje. Decisão certa.
Доброго!
На доске объявлений вы найдете множество свежих объявлений о продаже недвижимости в Темиртау. Объявления о продаже домов и квартир обновляются регулярно. Бесплатные объявления с фото и подробными описаниями помогут вам сделать правильный выбор. Подать объявление можно легко и быстро, просто заполнив форму на сайте. Объявления Темиртау помогут вам найти идеальное жилье.
Полная информация по ссылке – https://natumbe.kz
спальник мешок кокон, ремонт пылесосов сервис, запчасти форд фокус
ламинат укладка астана, маникюрный набор инструменты, сиделка для пожилых
Всего наилучшего и хорошей информации!
заказать кухню в спб от производителя https://kuhni-spb-57.ru
купить кухню в спб от производителя купить кухню в спб от производителя
скачивать видео с ютуба https://skachat-video-s-youtube-10.ru
сервис скачивания с ютуба https://skachat-video-s-youtube-9.ru
advice
dash web wallet access 2
Sweet blog! I found it while browsing on Yahoo News. Do you have any tips on how to get listed in Yahoo News? I’ve been trying for a while but I never seem to get there! Thank you
top casino malaysia top casino malaysia
“kahverengi ve sar? kar?s?m?” hakk?nda bilgi arayanlar icin cok faydal? bir yaz? buldum. Suradan okuyabilirsiniz: https://yappendik.com/articles/kahverengi-sari-renk-karisimi-estetik-etkiler/
рольшторы на окна цена https://elektricheskie-rulonnye-shtory99.ru
you could look here
best crypto wallet reddit 2
круглосуточный вывод из запоя нарколог 24 https://vyvod-iz-zapoya-na-domu-sankt-peterburg-19.ru
прокапаться от запоя прокапаться от запоя
автобусный тур в питер автобусный тур в питер
find more info
best cosmos wallet custody
So my friend told me about 777Bet like two weeks ago and honestly i was skeptical at first but decided to check it out anyways and kinda got hooked? like the whole thing is pretty straightforward, no complicated stuff, just log in and go. my mate said it was good and he was defintely right lol
世界盃杯世足賽
2026 世界盃 預計由 48 個國家代表隊 參與本屆賽事,本屆賽事將分成 12 個小組,每組 4 隊。各組前兩名 將晉級 淘汰賽,進行 後續淘汰賽與冠軍爭奪戰。
這屆 FIFA 世界盃 會在 2026 年 6 月 正式開踢。開幕賽事 預計由 墨西哥迎戰南非,並在 6 月 12 日 於阿茲特克體育場舉行。同一天稍後,南韓將迎戰捷克。隔日,加拿大對波士尼亞,以及美國對巴拉圭等小組賽首輪賽事將登場。
小組賽方面,A 組 包括 墨西哥、南非、韓國及捷克;B 組 包含 加拿大、波士尼亞、卡達以及瑞士;C 組 則由 巴西、摩洛哥、海地及蘇格蘭構成。包括 法國、阿根廷、巴西、德國、西班牙與英格蘭等勁旅 已確認所屬小組。
淘汰賽 將於 7 月初 正式進行,16 強賽 預計從 7 月 4 日 開始,最終決賽將在 7 月 19 日 上演,並誕生 2026 世界盃冠軍隊伍。
從過往戰績來看,墨西哥過去曾與南非於 2010 年世界盃 對決,當時雙方以 1 比 1 握手言和,至今未分勝負。
同時,足球比賽規則如越位、黃牌、紅牌、VAR 與點球判罰,仍是球迷觀賽時的重要基礎知識,球迷對規則判定仍十分關心。
вывод из запоя в клинике https://vyvod-iz-zapoya-v-staczionare-nizhnij-novgorod-16.ru
прокапаться после запоя на дому прокапаться после запоя на дому
сохранить видео с ютуба в хорошем качестве https://skachat-video-s-youtube-10.ru
изготовление кухонь на заказ в санкт петербурге https://kuhni-spb-57.ru
скачать видео из ютуб онлайн скачать видео из ютуб онлайн
заказать кухню в спб от производителя заказать кухню в спб от производителя
Full Report
defi wallet apk access
вызов нарколога на дом вызов нарколога на дом
mostbet promo code no deposit – mostbet app ios, code promo mostbet
mostbet kayıt bonusu – mostbet türkiye yasal mi, mostbet giriş
mostbet casino giriş – mostbet casino kayıt, mostbet kayıt bonusu
mostbet türkiye oyun – mostbet app download, mostbet türkiye giriş
нарколог вывод из запоя нарколог вывод из запоя
mostbet türkiye giriş – mostbet giriş yap, mostbet türkiye güncel giriş
mostbet download app – mostbet online app, mostbet türkiye yasal mı
вывод из запоя цены вывод из запоя цены
Recommended Site
crypto payment gateway api
mostbet türkiye yasal mi – mostbet app apk download, mostbet promo code
mostbet cashback nasıl kullanılır – mostbet türkiye oyun, mostbet resmi web sitesi kayıt
mostbet türkiye girişi – mostbet app, download mostbet app
mostbet türkiye oyun – mostbet cashback, mostbet kayıt
mostbet türkiye yasal mı – mostbet kayıt, promo code mostbet
mostbet türkiye indir – mostbet download app, mostbet casino kayıt
mostbet türkiye giriş – mostbet app, mostbet türkiye
mostbet türkiye giriş – mostbet türkiye, mostbet casino promo code
mostbet türkiye – mostbet online app, mostbet app download for android
promo code mostbet – mostbet app apk download, mostbet tr giriş
капельница от запоя капельница от запоя
mostbet resmi web sitesi kayıt – mostbet giriş, mostbet app apk download
mostbet türkiye giriş – mostbet kayıt, mostbet app ios
mostbet casino giriş – mostbet promo code, mostbet app ios
mostbet türkiye giriş – mostbet türkiye yasal mı, mostbet giriş
mostbet casino giriş – mostbet güncel giriş, mostbet giriş türkiye
my link
opencart cryptocurrency
электрические рулонные шторы купить электрические рулонные шторы купить
mostbet cashback – mostbet giriş türkiye, mostbet promo code
mostbet türkiye giriş – mostbet giriş, mostbet promo-code
тур по петербургу тур по петербургу
mostbet türkiye oyun – mostbet türkiye güncel giriş, mostbet app
mostbet türkiye güncel giriş – mostbet mobile app, mostbet cashback nasıl kullanılır
mostbet giriş türkiye – code promo mostbet, mostbet giriş yap
mostbet app – mostbet giriş yap, mostbet tr giriş
mostbet türkiye güncel giriş – mostbet app download for android, mostbet tr giriş
mostbet türkiye oyun – mostbet giriş, mostbet app download for android
капельница на дому недорого капельница на дому недорого
mostbet cashback nasıl kullanılır – mostbet türkiye yasal mı, mostbet giriş
mostbet türkiye girişi – mostbet türkiye, mostbet app download for android
mostbet giriş türkiye – mostbet türkiye yasal mi, mostbet tr giriş
mostbet promo code – mostbet app, mostbet app free download
кухни на заказ от производителя https://kuhni-spb-57.ru
заказать кухню заказать кухню
скачать видео ютуб на пк https://skachat-video-s-youtube-9.ru
go to this web-site
cryptocurrency link for payment
I think that may be an interesting element, it made me assume a bit. Thanks for sparking my considering cap. On occasion I get so much in a rut that I simply really feel like a record.
mostbet mobile app – mostbet giriş türkiye, mostbet türkiye güncel giriş
mostbet türkiye – mostbet türkiye oyun, mostbet giriş
mostbet app download – mostbet cashback nasıl kullanılır, mostbet casino promo code
It’s the best time to make some plans for the future and it is time to be happy. I’ve read this post and if I could I wish to suggest you some interesting things or tips. Maybe you can write next articles referring to this article. I wish to read even more things about it!
Your thing regarding creating will be practically nothing in short supply of awesome. This informative article is incredibly useful and contains offered myself a better solution to be able to my own issues. Which can be the specific purpose MY PARTNER AND I has been doing a search online. I am advocating this informative article with a good friend. I know they are going to get the write-up since beneficial as i would. Yet again many thanks.
mostbet kayıt bonusu – mostbet giriş türkiye, mostbet türkiye güncel giriş
You are not right. I am assured. I can prove it. Write to me in PM, we will talk.
капельница от запоя в стационаре https://vyvod-iz-zapoya-v-staczionare-nizhnij-novgorod-16.ru
Your idea is outstanding; the issue is something that not enough persons are speaking intelligently about. I’m very happy that I stumbled throughout this in my seek for one thing regarding this.
Simply wish to say the frankness in your article is surprising.
mostbet promo-code – promo code mostbet, mostbet türkiye güncel giriş
вывод из запоя на дому спб цены https://vyvod-iz-zapoya-na-domu-sankt-peterburg-19.ru
mostbet promo-code – mostbet türkiye güncel giriş, mostbet türkiye yasal mi
mostbet cashback – mostbet promo code no deposit, mostbet casino promo code
How long have you been in this field? You seem to know a lot more than I do, I’d love to know your sources!
Wow, amazing blog layout! How long have you been blogging for? you make blogging look easy. The overall look of your site is wonderful, let alone the content!
mostbet casino promo code – mostbet app, mostbet app apk download
I don’t normally comment but I gotta say appreciate it for the post on this one : D.
mostbet app download for android – mostbet türkiye yasal mi, mostbet güncel giriş
the original source
pay with crypto
mostbet türkiye güncel giriş – mostbet app, mostbet tr giriş
mostbet türkiye yasal mi – mostbet online app, mostbet türkiye giriş
mostbet casino giriş – mostbet cashback, mostbet online app
Read Full Article
solana payment api
mostbet kayıt – mostbet promo code, mostbet türkiye güvenilir mi
mostbet güncel giriş – mostbet türkiye güncel giriş, mostbet casino giriş
капельница от запоя самара капельница от запоя самара
mostbet mobile app – mostbet türkiye yasal mı, mostbet giriş türkiye
mostbet giriş yap – mostbet download app, mostbet cashback
mostbet türkiye girişi – mostbet – casä°no cashback, mostbet online app
mostbet güncel giriş – mostbet türkiye oyun, mostbet app download
This is valuable stuff.In my opinion, if all website owners and bloggers developed their content they way you have, the internet will be a lot more useful than ever before.
mostbet türkiye güvenilir mi – promo code mostbet, mostbet türkiye güncel giriş
mostbet türkiye güncel giriş – mostbet türkiye giriş, mostbet türkiye giriş
mostbet kayıt bonusu – mostbet app ios, mostbet türkiye yasal mı
mostbet türkiye indir – code promo mostbet, mostbet casino promo code
mostbet güncel giriş – mostbet cashback nasıl kullanılır, mostbet app download for android
mostbet casino kayıt – mostbet giriş, mostbet türkiye yasal mi
mostbet türkiye güncel giriş – mostbet app download, mostbet casino promo code
mostbet türkiye oyun – mostbet app apk download, mostbet kayıt
прокапаться от алкоголя прокапаться от алкоголя
We are a group of volunteers and starting a new initiative in our community. Your blog provided us with valuable information to work on|.You have done a marvellous job!
code promo mostbet – mostbet online app, mostbet online app
Subi R$2k. Tô fora.
mostbet türkiye – mostbet app apk download, mostbet resmi web sitesi kayıt
mostbet türkiye giriş – mostbet promo-code, mostbet giriş yap
You are good writer. Thank you.
Honestly this site is way better than what I expected 🙂 777 bit
Subi R$340. Tô fora.
Raider Jane’s Crypt of Fortune de novo. Bombando.
Vale a pena comprar bônus no Fortune Rabbit ou espera natural compensa mais?
O resumão de domingo não para de discutir frequência de hit vs max win.
here are the findings
crypto payment system
Buscas por “RTP Fortune Rabbit” passaram “max win Fortune Rabbit” esse trimestre. Galera ficou mais letrada.
mostbet cashback – mostbet türkiye güncel giriş, mostbet online app
download mostbet app – mostbet casino kayıt, mostbet app
mostbet türkiye güncel giriş – mostbet türkiye, mostbet cashback
mostbet türkiye indir – mostbet app free download, mostbet cashback nasıl kullanılır
Os clipes de max win do Fortune Mouse enganam — sessão média é bem mais calma.
PIX ou USDT pra saque rápido? O post-game não decide.
mostbet promo-code – mostbet promo code no deposit, mostbet türkiye girişi
mostbet cashback nasıl kullanılır – mostbet türkiye giriş, mostbet türkiye giriş
капельница от запоя на дому капельница от запоя на дому
mostbet download app – mostbet türkiye oyun, mostbet giriş
mostbet – casä°no cashback – mostbet app free download, mostbet giriş yap
петербург туры петербург туры
кухни на заказ производство спб https://kuhni-spb-57.ru
скачать видео с youtube https://skachat-video-s-youtube-9.ru
кухни под заказ в спб https://kuhni-spb-60.ru
mostbet promo code – mostbet app download for android, mostbet casino promo code
mostbet türkiye oyun – mostbet cashback nasıl kullanılır, mostbet app
web link
pay in cryptocurrency
где можно прокапаться где можно прокапаться
наркологический вывод из запоя наркологический вывод из запоя
I just couldnt leave your website before saying that I really enjoyed the useful information you offer to your visitors… Will be back often to check up on new stuff you post!
капельница после запоя капельница после запоя
Hi, I just hopped over to your web-site through StumbleUpon. Not somthing I might typically browse, but I liked your views none the less. Thanks for making something worthy of reading through.
This is definitely a wonderful webpage, thanks a lot..
Most often since i look for a blog Document realize that the vast majority of blog pages happen to be amateurish. Not so,We can honestly claim for which you writen is definitely great and then your webpage rock solid.
вывода из запоя 24 вывода из запоя 24
I think I will become a great follower.Just want to say your post is striking. The clarity in your post is simply striking and i can take for granted you are an expert on this subject.
How long have you been in this field? You seem to know a lot more than I do, I’d love to know your sources!
Quanto tempo vocês dão pro Hood vs Wolf antes de rotacionar?
Bônus no Santa’s Gift Rush. Fechei. Acabou.
Vale a pena comprar bônus no Ganesha Gold ou espera natural compensa mais?
заказать обратный звонок наркология заказать обратный звонок наркология
Fantastic piece of writing here1
When are you going to take this to a full book?
капельница от запоя на дому цена капельница от запоя на дому цена
Great info! Keep post great articles.
кухня по индивидуальному заказу спб https://kuhni-spb-57.ru
рулонные шторы производство https://elektricheskie-rulonnye-shtory99.ru
I discovered your weblog site on google and verify just a few of your early posts. Proceed to maintain up the very good operate. I simply further up your RSS feed to my MSN News Reader.
website here
bitcoin payment api
тур в питер тур в питер
прокапаться от алкоголя самара прокапаться от алкоголя самара
сервис скачивания с ютуба https://skachat-video-s-youtube-9.ru
изготовление кухонь на заказ в санкт петербурге https://kuhni-spb-60.ru
true-fortune casino true-fortune casino .
true fortune coupons http://truefortune-promo-code.com/ .
When we look at these issues, we know that they are the key ones for our time.
сколько стоит капельница от запоя сколько стоит капельница от запоя
Капельница от похмелья с контролем врача в Самаре является одной из самых популярных и эффективных услуг для тех, кто сталкивается с выраженными симптомами похмельного синдрома. Похмелье может проявляться не только головной болью и усталостью, но и более серьезными проблемами, такими как тошнота, рвота, учащенное сердцебиение и повышение давления. Когда симптомы становятся особенно острыми, капельница помогает организму справиться с токсинами, восстановить водно-электролитный баланс и нормализовать состояние пациента, в том числе при запое. Важно, что контроль врача на протяжении всей процедуры обеспечивает безопасность и эффективность, при этом помощь может оказываться как на дому, так и в клинике при лечении алкоголизма.
Подробнее – капельница от похмелья на дом в самаре
вывод из запоя недорого вывод из запоя недорого
Good site! I truly love how it is easy on my eyes it is. I am wondering how I might be notified when a new post has been made. I’ve subscribed to your RSS which may do the trick? Have a great day!
вывод из запоя на дому екатеринбург круглосуточно вывод из запоя на дому екатеринбург круглосуточно
This website has lots of really useful stuff on it. Thanks for informing me.
Nevertheless, it’s all carried out with tongues rooted solidly in cheeks, and everybody has got nothing but absolutely love for their friendly neighborhood scapegoat. In reality, he is not merely a pushover. He is simply that extraordinary breed of person solid enough to take all that good natured ribbing for what it really is.
click to read coin leap app
her response leap wallet x official
see leap wallet twitter
find out this here leap wallet twitter
have a peek at these guys best cosmos wallet
anonymous leap wallet
look at this site x.com leap wallet
learn the facts here now leap wallet
special info leap wallet
кухни спб на заказ кухни спб на заказ
нарколог на дому капельница цена нарколог на дому капельница цена
check out the post right here leap wallet twitter profile
additional reading leap cosmos wallet
read this article leap wallet twitter
internet leap wallet twitter
company website leap wallet
check my blog leap wallet twitter profile
look at this now leap wallet twitter
More Info leap wallet twitter
go leap wallet dashboard
click resources leap wallet twitter
Hello.This article was extremely interesting, particularly since I was searching for thoughts on this subject last couple of days.
This full-service production company in Italy knows how to optimize a shooting schedule to save client money.
https://cloveebiz.com.ng/@blondellsverje?page=about
автоматические рулонные шторы с электроприводом автоматические рулонные шторы с электроприводом
вызов нарколога нижний новгород вызов нарколога нижний новгород
read this article leap wallet
find out this here coin leap app
click for more leap wallet twitter
click now leapwallet
navigate to these guys leap wallet twitter
this contact form leap wallet
find here leap cosmos wallet
see post leap wallet twitter
find here leap wallet features
Homepage best cosmos wallet
Best hairstyles for frizzy hair: tame humidity and keep style. This article presents a comprehensive guide for matching cut structure to porosity and damage level, so styles hold shape when humidity spikes. You will also read about leave-in conditioners and gels by hold and moisture needs. In addition, it outlines silk pillows and pre-shampoo masks. Access all sections here: https://hairpick.over-blog.com/2026/05/best-hairstyles-for-frizzy-hair-tame-style.html should you review all topics before an appointment.
click this link now leap wallet twitter
go to the website leap wallet
important source leap wallet
company website coin leap app
go to this site leap wallet twitter
find this leap wallet
Source leap wallet x official
go to these guys leap wallet twitter profile
additional reading leap wallet
тур путевки в петербург тур путевки в петербург
you can check here leap wallet twitter
изготовление кухни на заказ в спб изготовление кухни на заказ в спб
youtube скачать видео https://skachat-video-s-youtube-9.ru
try this leapwallet
find leap wallet
additional resources best cosmos wallet
look at this web-site x.com leap wallet
you can try here leap wallet
read this post here leap wallet
web link leapwallet
check that leap wallet dashboard
вывод из запоя нарколог 24 вывод из запоя нарколог 24
directory x.com leap wallet
pop over to this website leap wallet x official
you can check here leap wallet twitter
go right here leapwallet
a fantastic read leap wallet twitter profile
Recommended Reading leap wallet
see this site leap wallet twitter
visit the site leap wallet
visit the website leap wallet
You should definitely explore this powerful AI instrument: https://chatgpt.com/g/g-6a0cad3fde60819186a507e3ee67f20f-turk-ai-humanizer .
If you need an efficient AI solution, take a look at this one: [url]https://chatgpt.com/g/g-6a0caa02051481918d0012f6fb2a7611-humanizar-texto-ia-en-espanol[/url] .
additional resources leap wallet twitter
this leap cosmos wallet
Full Article leap wallet twitter
useful source leap wallet twitter profile
reference leap wallet twitter
click over here leap wallet
вывод из запоя екатеринбург вывод из запоя екатеринбург
Homepage leap wallet
published here leap cosmos wallet
Continue Reading leap wallet twitter profile
the original source leap wallet
This Site leap cosmos wallet
go to website leap wallet twitter
go right here leapwallet
website here leap wallet twitter
see it here leap wallet x official
Check Out Your URL leap wallet twitter
Going Here leap wallet official
try this website leap wallet twitter
visit here coin leap app
this article best cosmos wallet
find out leap wallet twitter
нарколог на дом круглосуточно нарколог на дом круглосуточно
электропривод рулонных штор электропривод рулонных штор
why not find out more leap wallet official
Melhor horário pra jogar Wizdom Wonders no fim de semana — alguém tem dado real?
O cara que parou de chasing em março jura por transferência bancária pra saque rápido nas sessões de Wild Bandito.
pop over to these guys leap wallet twitter
O veterano calado colocou R$180 no Diamond Cascade e saiu com R$1.800. Sem print, só contou.
click for info leap wallet twitter
скачать видео ютуб 1080 скачать видео ютуб 1080
капельница от запоя на дому цена капельница от запоя на дому цена
Hood vs Wolf só caiu o bônus no giro 412 — antes disso, nada.
my website x.com leap wallet
why not try these out leap wallet
news leap wallet twitter
go to this web-site x.com leap wallet
Stop-loss saudável pra slot de alta volatilidade tipo Fortune Dragon? 30%? 40%?
site link leap wallet dashboard
these details leap wallet twitter
he said leap wallet twitter
Discover More Here leap wallet twitter
visit this site right here leap wallet
their website leap wallet
look at here now leap wallet twitter profile
additional hints leap wallet twitter
click site leap cosmos wallet
my site leap cosmos wallet
Home Page leap cosmos wallet
look at this site leap wallet twitter
try this website x.com leap wallet
you could look here leap wallet twitter profile
A galera mais antiga virou ambiente de debate, não de hype. 2026 é diferente.
he has a good point leap wallet dashboard
you can try here leap wallet twitter profile
вывод из запоя в воронеже вывод из запоя в воронеже
капельница на дому в в самаре цены капельница на дому в в самаре цены
Pulando Wild Wild Riches até o próximo patch.
home leap wallet
more leap wallet x official
PIX caiu em 6 segundos. Three Monkeys pode esperar.
капельница от запоя капельница от запоя
капельница на дому цена екатеринбург капельница на дому цена екатеринбург
выезд нарколога на дом выезд нарколога на дом
click this site leap wallet x official
I’ve found this top-tier AI tool very helpful: https://chatgpt.com/g/g-6a0c7a25cb948191a41ec434533e9c89-organic-chemistry-tutor-stereoisomers-explorer .
You should definitely explore this powerful AI instrument: [url]https://chatgpt.com/g/g-6a0c74efc4f08191b796e1e572e71f80-chemistry-tutor-ai-step-by-step-equations[/url] .
see post leap cosmos wallet
index x.com leap wallet
here leap cosmos wallet
my link leap wallet extension
read this leap wallet twitter
вывод из запоя недорого вывод из запоя недорого
check over here leap wallet
go to these guys leap cosmos wallet
navigate to these guys leap wallet
you can try this out leap wallet
get more leap wallet github
цены на вывод из запоя на дому цены на вывод из запоя на дому
company website leap wallet
капельница от запоя капельница от запоя
Alguém tá mesmo tracking taxa de bônus do Wild Wild Riches numa planilha real, sem ser feeling?
my response best cosmos wallet
check leap wallet
Resources leap wallet
look at this now leap wallet
you could look here leap wallet
Bônus do Butterfly Blossom bateu mais ou menos a cada 200-300 giros na minha amostra. Pode variar.
her comment is here leap wallet
click reference coin leap app
Bikini Paradise tá pesado no celular ultimamente, sei lá por quê.
A galera do chat parou de compartilhar compilação de max win. Não funciona mais como conteúdo.
click for more leap cosmos wallet
why not find out more leap wallet
рулонные шторы с электроприводом рулонные шторы с электроприводом
нарколог дом https://narkolog-na-dom-nizhnij-novgorod-2.ru
find more information leap wallet dashboard
вызов нарколога на дом цена https://narkolog-na-dom-voronezh-10.ru
загрузчик видео с ютуба загрузчик видео с ютуба
Alguém tá mesmo tracking taxa de bônus do Dim Sum Prize numa planilha real, sem ser feeling?
Se o Dragon Hatch 2 comeu 30% da banca sem feature, acabou. Sai.
original site leap wallet dashboard
Perdi R$80. Sem chasing.
straight from the source leap wallet
my explanation leap wallet
Find Out More leap wallet twitter profile
check over here leap wallet features
discover here best cosmos wallet
visit our website leap wallet github
find out this here leap wallet github
Homepage leapwallet
check my blog leap wallet features
Limpei a banca. Lição anotada.
click now leap cosmos wallet
вывести из запоя цена вывести из запоя цена
Banca primeiro. Bônus depois. Sempre nessa ordem.
Fortune Gods de novo? Os regulares não para de postar.
вызов на дом капельницы от запоя вызов на дом капельницы от запоя
капельница на дому цена екатеринбург капельница на дому цена екатеринбург
browse around these guys leap cosmos wallet
капельница от запоя вызов капельница от запоя вызов
лечение наркомании на дому лечение наркомании на дому
капельница екатеринбург цены https://kapelnicza-ot-pokhmelya-ekaterinburg-17.ru
visit this site right here leap wallet twitter profile
капельница после запоя капельница после запоя
служба вывода из запоя служба вывода из запоя
世界盃
2026 年 FIFA 世界盃 將會由 48 支球隊 角逐冠軍,整體賽程包含 12 組分組,每組 4 隊。每組排名前兩位的隊伍 將晉級 淘汰賽階段,展開 16 強、8 強、4 強、季軍戰與決賽。
這屆 FIFA 世界盃 將於 2026 年 6 月 正式開賽。首場比賽 預計由 墨西哥與南非交手,並在 6 月 12 日 在 Estadio Azteca 舉辦。同日後續賽程中,南韓與捷克交手。翌日,加拿大對波士尼亞,以及美國對巴拉圭等小組賽首輪賽事將登場。
小組賽方面,A 組 由 墨西哥、南非、南韓與捷克;B 組 包含 加拿大、波士尼亞、卡達與瑞士;C 組 則由 巴西、摩洛哥、海地與蘇格蘭同組。包括 巴西、法國、阿根廷、西班牙、英格蘭與德國等傳統強隊 都已確定分組結果。
後續淘汰輪次 將於 7 月初 開始,16 強賽 大約在 7 月 4 日 開踢,而冠軍戰預定於 7 月 19 日 進行,屆時將決定 2026 年 FIFA 世界盃冠軍。
歷史對戰方面,墨西哥過去曾與南非於 2010 年世界盃 碰面,當時雙方以 1 比 1 握手言和,至今未分勝負。
另外,足球常見規則包含越位、VAR、黃牌與紅牌制度,也是觀眾理解比賽的重要基礎,相關規則也持續受到關注。
visit this site right here leap wallet twitter
Recommended Reading leap wallet
look here leap wallet
visit here leap cosmos wallet
visit this site right here leap wallet
Semana bombando no Fortune Rabbit.
official site leap wallet
нарколог на дом срочно https://narkolog-na-dom-nizhnij-novgorod-2.ru
врач нарколог воронеж https://narkolog-na-dom-voronezh-10.ru
электрические рулонные шторы на окна электрические рулонные шторы на окна
вывод из алкогольного запоя нарколог 24 https://vyvod-iz-zapoya-na-domu-sankt-peterburg-22.ru
скачать youtube видео скачать youtube видео
Discovering a flattering cut for your face and routine with face shape and texture in mind. You will find here a structured guide designed to help you leave the chair with confidence, starting from oval, round, square, heart, and diamond proportions. You will also read about why blunt ends can add weight on fine hair. In addition, it compares short and long hair in terms of salon frequency. The detailed version is published at https://1funeralbrokers.wixsite.com/my-site-1 when you want every chapter in one place.
weblink leap wallet official
link leap wallet twitter
сколько стоит капельница на дому в екатеринбурге сколько стоит капельница на дому в екатеринбурге
нарколог на дом анонимно нарколог на дом анонимно
вывод из запоя в воронеже вывод из запоя в воронеже
капельница на дому цена екатеринбург капельница на дому цена екатеринбург
Best casino evar https://funbetcasino.app/
Abnormal this put up is totaly unrelated to what I was searching google for, but it surely used to be listed at the first page. I suppose your doing one thing proper if Google likes you adequate to place you at the first page of a non similar search.
A friend of mine advised me to review this site. And yes. it has some useful pieces of info and I enjoyed reading it.
very good post, i certainly love this web site, keep on it
Great info! Keep post great articles.
Pretty impressive article. I just stumbled upon your site and wanted to say that I have really enjoyed reading your opinions. Any way I’ll be coming back and I hope you post again soon.
true fortune bonus codes true fortune bonus codes .
круглосуточный вывод из запоя нарколог 24 https://vyvod-iz-zapoya-na-domu-sankt-peterburg-22.ru
Best casino evar https://felix-spin-casino.com/
why not find out more leap wallet twitter
click to read leap cosmos wallet
наркологическая помощь на дому https://narkolog-na-dom-nizhnij-novgorod-2.ru
нарколог домой https://narkolog-na-dom-voronezh-10.ru
заказать рулонные шторы в москве заказать рулонные шторы в москве
скачать с ютюб скачать с ютюб
find this leap wallet twitter
нарколог на дому капельница цена нарколог на дому капельница цена
hop over to this web-site x.com leap wallet
You are good writer. Thank you.
капельница от запоя капельница от запоя
вызов врача нарколога на дом вызов врача нарколога на дом
капельница екатеринбург цены https://kapelnicza-ot-pokhmelya-ekaterinburg-14.ru
поставить капельницу цена в екатеринбурге https://kapelnicza-ot-pokhmelya-ekaterinburg-17.ru
This is valuable stuff.In my opinion, if all website owners and bloggers developed their content they way you have, the internet will be a lot more useful than ever before.
Если вас интересуют интим спб, на нашем сайте вы найдете широкий выбор проверенных объявлений.
Индивидуалки в Санкт-Петербурге пользуются значительным спросом среди жителей и гостей города. Их услуги становятся все более популярными благодаря разнообразию и качеству. Важно понимать, что выбор индивидуалки требует внимательности и осторожности.
Каждая девушка старается
I am glad to talk with you and you give me great help
вывод из запоя нарколог24 https://vyvod-iz-zapoya-na-domu-sankt-peterburg-22.ru
Amazing! Your site has quite a few comment posts. How did you get all of these bloggers to look at your site I’m envious! I’m still studying all about posting articles on the net. I’m going to view pages on your website to get a better understanding how to attract more people. Thank you!
I don’t normally comment on blogs.. But nice post! I just bookmarked your site
I wish I could craft such articles as this. Thank you very much.
It’s time for communities to rally.
We’re developing a conference, and it looks like you would be a great speaker.
сочетание рулонных рулонные шторы и тюль фото https://rulonnye-shtory-s-elektroprivodom190.ru
сколько стоит поставить капельницу дома сколько стоит поставить капельницу дома
Curly cuts that add volume where you want it and remove bulk where you do not. Readers can explore a clear framework covering bobs, lobs, shags, pixies, and long layered curly styles, beginning with invisible layers to reduce weight without losing shape. Additionally, the text explains diffusing, plopping, and gel cast routines for hold. In addition, it outlines moisture and hold products by porosity. You can read the complete guide at https://ancient-bird-bfd3.simritual73.workers.dev/ if you prefer the extended recommendations sequentially.
нарколог на дом в воронеже https://narkolog-na-dom-voronezh-10.ru
скачать видео из ютуба онлайн скачать видео из ютуба онлайн
наркологическая помощь на дому наркологическая помощь на дому
капельница после запоя капельница после запоя
нарколог на дом цены нарколог на дом цены
вывод из запоя на дому вывод из запоя на дому
круглосуточный вывод из запоя нарколог 24 https://vyvod-iz-zapoya-na-domu-sankt-peterburg-22.ru
капельница на дому екатеринбург цены https://kapelnicza-ot-pokhmelya-ekaterinburg-14.ru
врача капельницу от запоя врача капельницу от запоя
выезд нарколога на дом выезд нарколога на дом
“bagc?ks?z krampon” konusu icin burada harika bilgiler var. Kendiniz gorun: https://sporatelier.com/articles/bagciksiz-krampon-adidas-inovasyon-performans/
наркологические стационары наркологические стационары
ролевые шторы ролевые шторы
откапывание на дому откапывание на дому
скачать из ютуба видео скачать из ютуба видео
врач нарколог на дом https://narkolog-na-dom-voronezh-10.ru
нарколог самара нарколог самара
нарколог на дом анонимно нарколог на дом анонимно
посмотреть в этом разделе vodka bet casino
продолжить вотка бет
Продолжение водка бет
кликните сюда водкабет
перенаправляется сюда vodka bet
узнать больше водка бет
перейти на сайт водка бэт
перенаправляется сюда водка бэт
посетить веб-сайт водка бет
Следующая страница водка бет
узнать больше Здесь водкабет
подробнее водкабет
опубликовано здесь зеркало vodka bet
Источник водка бет
Смотреть здесь vodka bet casino
посетить веб-сайт водкабет
найти это водка бэт
читать vodkabet
подробнее здесь vodkabet
продолжить vodkabet онлайн казино
этот контент зеркало водка бет
этот контент vodkabet прямо сейчас
читать зеркало водка бет
смотреть здесь водкабет
на этом сайте зеркало vodka bet
реабилитация наркозависимых стационар реабилитация наркозависимых стационар
капельница екатеринбург цены https://kapelnicza-ot-pokhmelya-ekaterinburg-14.ru
наркологическая помощь на дому наркологическая помощь на дому
поставить капельницу на дому екатеринбург цена поставить капельницу на дому екатеринбург цена
посмотреть на этом сайте vodkabet онлайн казино
здесь водка бэт
проверить сайт зеркало vodka bet
нажмите, чтобы подробнее vodka bet casino
выберите ресурсы vodka bet
Продолжение водка бэт
Подробнее vodkabet
узнать водка бэт
выберите ресурсы vodkabet
нажмите, чтобы подробнее водкабет
перейдите на этот сайт водка бэт
Продолжение водкабет
рулонные шторы виды механизмов рулонные шторы виды механизмов
можно проверить ЗДЕСЬ водка бэт
продолжить зеркало vodka bet
капельница от запоя на дому капельница от запоя на дому
Перейти на сайт водка бэт
Смотреть здесь зеркало водка бет
опубликовано здесь вотка бет
перейдите на этот сайт водка бет
в этом разделе вотка бет
такой зеркало vodka bet
scores crazy time https://crazy-time6.com/stats/
веб-сайте зеркало водка бет
ссылка на сайт водкабет
нажмите, чтобы подробнее вотка бет
этот контент vodkabet прямо сейчас
такой vodka bet casino
Следующая страница зеркало vodka bet
подробнее водка бет
другие водкабет
нарколог на дом выезд https://narkolog-na-dom-samara-10.ru
найти это вотка бет
другие водкабет
содержание зеркало водка бет
узнать водка бет
веб-сайте зеркало водка бет
перейдите на этот сайт водкабет
Flattering styles when a chin-length bob emphasizes jaw width. This article presents a comprehensive guide that explains why volume belongs above the cheekbones, not at the chin, opening with how triangle differs from heart or oval balancing. Another part examines layer placement to soften angular jawlines without hiding structure. Moreover, the guide discusses bangs that shorten perceived forehead height thoughtfully. Access all sections here: https://justpaste.it/kmpvw for the full chapter-by-chapter detail.
наркологическая помощь стационар наркологическая помощь стационар
нарколог на дом круглосуточно цены https://narkolog-na-dom-samara-9.ru
веб-сайт вотка бет
сайт водка бет
вывод из запоя в наркологическом стационаре https://vyvod-iz-zapoya-v-staczionare-nizhnij-novgorod-17.ru
стоимость капельницы на дому екатеринбург стоимость капельницы на дому екатеринбург
Источник зеркало водка бет
этот сайт водка бэт
узнать водкабет
ссылка на сайт vodka bet
подробнее здесь вотка бет
проверить сайт vodkabet
выведение из запоя на дому цена выведение из запоя на дому цена
смотреть здесь водка бет
нажмите здесь vodkabet
вывод из запоя на дому недорого вывод из запоя на дому недорого
перейдите на этот сайт водка бет
перейдите на этот сайт зеркало vodka bet
взгляните на сайте здесь vodkabet
узнать водка бет
ссылка на сайт водка бет
сайт водка бет
узнать больше водка бэт
найти это vodkabet прямо сейчас
кликните сюда зеркало водка бет
читать vodkabet
каталог водка бэт
веб-сайте vodka bet casino
этот контент зеркало vodka bet
врач нарколог выезд врач нарколог выезд
такой vodkabet
перенаправляется сюда зеркало vodka bet
Источник vodkabet новый сайт
подробнее зеркало водка бет
Перейти на сайт зеркало vodka bet
роликовые шторы купить https://rulonnye-shtory-s-elektroprivodom190.ru
поставить капельницу от алкоголизма поставить капельницу от алкоголизма
каталог vodkabet новый сайт
проверить сайт вотка бет
здесь вотка бет
перейдите на этот сайт водка бет
777 bet online casino and dive into the world of gambling with unique offers!
The appealing promotions ensure that players feel valued and engaged.
подробнее здесь зеркало водка бет
прокапаться на дому от алкоголя цена прокапаться на дому от алкоголя цена
ссылка на сайт vodkabet прямо сейчас
вывожу из запоя екатеринбург вывожу из запоя екатеринбург
этот контент vodkabet онлайн казино
зайти на сайт vodkabet прямо сейчас
наркологический стационар санкт петербург наркологический стационар санкт петербург
Главная vodkabet
веб-сайте vodkabet
“arch fit ne demek” hakk?nda bilgi arayanlar icin burada harika bilgiler var. Kendiniz gorun: https://limitligiyin.com/articles/skechers-arch-fit-ayakkabi-yorumlari/
ссылка на сайт vodka bet casino
вызов на дом нарколога цена https://narkolog-na-dom-samara-10.ru
Подробнее водкабет
пояснения vodka bet casino
зайти на сайт вотка бет
смотреть здесь vodka bet casino
Продолжение vodka bet casino
перенаправляется сюда vodka bet casino
узнать больше водкабет
сюда зеркало vodka bet
наркологическая помощь на дому наркологическая помощь на дому
содержание зеркало водка бет
вывод из запоя в стационаре вывод из запоя в стационаре
капельницы на дому екатеринбург цена капельницы на дому екатеринбург цена
взгляните на сайте здесь vodkabet
Узнать больше vodka bet casino
на этом сайте водка бет
рольшторы заказать https://rulonnye-shtory-s-elektroprivodom190.ru
выберите ресурсы зеркало vodka bet
выведение из запоя на дому выведение из запоя на дому
страница vodka bet casino
нарколог на дом вывод из запоя на дому нарколог на дом вывод из запоя на дому
здесь зеркало водка бет
перейдите на этот сайт vodkabet
проверить сайт vodka bet
нарколог стационар спб нарколог стационар спб
узнать vodkabet
подробнее vodka bet casino
нарколог на дом цена москва врач выезд нарколог на дом цена москва врач выезд
посетить сайт вотка бет
капельница от запоя цена капельница от запоя цена
подробнее vodka bet
этот сайт vodka bet casino
Смотреть здесь зеркало vodka bet
узнать vodka bet casino
можно проверить ЗДЕСЬ vodkabet онлайн казино
Смотреть здесь vodka bet
капельница от похмелья на дому стоимость капельница от похмелья на дому стоимость
сайт vodkabet новый сайт
узнать больше vodkabet прямо сейчас
проверить сайт vodkabet новый сайт
сайт водка бэт
проверить сайт vodkabet
выведение из запоя екатеринбург выведение из запоя екатеринбург
выберите ресурсы зеркало водка бет
выберите ресурсы vodkabet
how to win at crazy time https://crazy-time-slot.it/
crazy time lottomatica https://crazy-time-ita.com/
crazy time tracksino https://crazy-time8.com/
веб-сайте вотка бет
ruota crazy time https://crazytime-italia-it.com/
вызов нарколога на дом цена https://narkolog-na-dom-samara-10.ru
продолжить водка бэт
On Win, kullanıcılarına geniş bahis seçenekleri ve yüksek oran avantajları sunan popüler platformlar arasında yer almaktadır. Güvenilir altyapısı ve hızlı işlem seçenekleri sayesinde birçok oyuncu tarafından tercih edilmektedir.
подробнее здесь vodka bet casino
перейдите на этот сайт зеркало vodka bet
Срочный выезд механика при поломке локомобиля — приехали через полтора часа, устранили проблему. Не пришлось останавливать маневровые работы на весь день из-за простоя техники. запчасти для тракторов Алматы
Подробнее здесь vodka bet casino
частный нарколог на дом анонимно https://narkolog-na-dom-samara-9.ru
здесь vodkabet онлайн казино
узнать больше vodka bet casino
перейти на сайт vodka bet casino
перейти на сайт водка бет
подробнее водка бет
наркология вывод из запоя в стационаре наркология вывод из запоя в стационаре
капельница на дому цена екатеринбург капельница на дому цена екатеринбург
найти это vodkabet
наркологический стационар наркологический стационар
A friend of mine advised this site. And yes. it has some useful pieces of info and I enjoyed scaning it. Therefore i would love to drop you a quick note to express my thank. Take care
We need to build frameworks and funding mechanisms.
Could not disagree with the main ideas. Wonder how things will develop over the coming years.
перенаправляется сюда водка бет
Источник vodkabet прямо сейчас
FIFA世界杯
2026 年世界盃 預計由 48 支球隊 參賽,本屆賽事將分成 12 個小組,每組 4 隊。各組前兩名 可晉級 淘汰賽階段,進行 後續淘汰賽與冠軍爭奪戰。
2026 世界盃 預計在 2026 年 6 月 正式開賽。首場比賽 將由 墨西哥與南非交手,並在 6 月 12 日 於阿茲特克體育場舉行。同日稍晚,南韓對決捷克。翌日,加拿大將迎戰波士尼亞,而美國則對上巴拉圭。
小組賽方面,A 組 包括 墨西哥、南非、韓國及捷克;B 組 有 加拿大、波士尼亞、卡達與瑞士;C 組 包含 巴西、摩洛哥、海地及蘇格蘭構成。包括 巴西、法國、阿根廷、西班牙、英格蘭與德國等傳統強隊 都已確定分組結果。
後續淘汰輪次 將於 7 月初 正式進行,16 強賽 預計從 7 月 4 日 開踢,決賽則安排在 7 月 19 日 舉辦,屆時將決定 2026 年 FIFA 世界盃冠軍。
從過往戰績來看,墨西哥與南非曾於 2010 年世界盃 碰面,當時雙方以 1 比 1 握手言和,歷史交鋒仍保持均勢。
另外,足球比賽規則如越位、黃牌、紅牌、VAR 與點球判罰,仍是球迷觀賽時的重要基礎知識,相關討論熱度不減。
A complete guide to the haircut that fits you by aligning geometry, strand behavior, and styling habits. This article presents a structured overview covering the path from mirror tracing to stylist dialogue, and guidance on thick, fine, and curly cutting approaches. It also covers consultation habits such as realistic photos and honest daily routines. Beyond that, it notes standing consultation posture for proportion balance. Access all sections here: https://hairpick-suits-me.web.app/ if you prefer the extended recommendations sequentially.
вывод из запоя цена на дому вывод из запоя цена на дому
найти это vodkabet прямо сейчас
круглосуточный вывод из запоя круглосуточный вывод из запоя
капельница самара цена капельница самара цена
подробнее vodkabet
нарколог москва на дом нарколог москва на дом
прокапаться от алкоголя в воронеже прокапаться от алкоголя в воронеже
электрические гардины для штор https://elektrokarniz150.ru
I just couldn’t leave your website before suggesting that I really enjoyed the usual information an individual supply on your visitors? Is gonna be back often in order to investigate cross-check new posts
вывод из запоя на дому екатеринбург круглосуточно вывод из запоя на дому екатеринбург круглосуточно
можно проверить ЗДЕСЬ vodkabet новый сайт
нарколог врач на дом https://narkolog-na-dom-samara-10.ru
наркологическая клиника со стационаром наркологическая клиника со стационаром
подробнее vodka bet casino
This is the wave – the big wave.
A friend of mine advised this site. And yes. it has some useful pieces of info and I enjoyed scaning it. Therefore i would love to drop you a quick note to express my thank. Take care
A friend of mine advised me to review this site. And yes. it has some useful pieces of info and I enjoyed reading it.
Nice blog. Could someone with little experience do it, and add updates without messing it up? Good information on here, very informative.
Get the facts leap wallet twitter profile
запой стационар https://vyvod-iz-zapoya-v-staczionare-nizhnij-novgorod-17.ru
You have some helpful ideas! Maybe I should consider doing this by myself.
прокапаться от алкоголя самара цена прокапаться от алкоголя самара цена
вывод из запоя круглосуточно вывод из запоя круглосуточно
вывод из запоя врач на дом вывод из запоя врач на дом
опубликовано здесь vodka bet casino
Подробнее vodkabet новый сайт
Смотреть здесь vodkabet прямо сейчас
top casino malaysia top casino malaysia
выберите ресурсы vodkabet прямо сейчас
врач нарколог выезд на дом москва цена врач нарколог выезд на дом москва цена
электрокарниз двухрядный цена https://elektrokarniz150.ru
здесь vodkabet прямо сейчас
читать vodkabet новый сайт
поставить капельницу на дому екатеринбург цена https://kapelnicza-ot-pokhmelya-ekaterinburg-16.ru
капельница на дому воронеж капельница на дому воронеж
вывод из запоя с выездом на дом цена вывод из запоя с выездом на дом цена
you can look here best cosmos wallet
real estate for sale in thailand phuket real estate for sale in thailand phuket
запой стационар https://vyvod-iz-zapoya-v-staczionare-nizhnij-novgorod-17.ru
Hi there everyone!
Let me share https://995bdt1.com/
It’s a fresh gaming site called 995BDT.
No deposit needed and get daily bonuses.
Takes 2 minutes to start.
Open the site and claim your bonus.
Have fun!
вызов на дом капельницы от запоя вызов на дом капельницы от запоя
Вывод из запоя на дому помогает быстро стабилизировать состояние пациента, но врач всегда предупреждает: если есть высокий риск инфаркта, инсульта, делирия, тяжелого отравления алкоголем, потери сознания или агрессии, лечение на дому может быть недостаточным. В этом случае центр организует госпитализацию, транспортировку и наблюдение в стационаре.
Детальнее – вывод из запоя цена
вывод из запоя на дому в екатеринбурге вывод из запоя на дому в екатеринбурге
вывод из запоя цена на дому вывод из запоя цена на дому
100cuci safe 100cuci safe
see page Phishing tools and malicious software for stealing data
нарколог на дом срочно нарколог на дом срочно
наркологическая помощь стационар наркологическая помощь стационар
электрокарниз https://elektrokarniz150.ru
important site Remote access services (RDP, SSH)
прокапаться на дому прокапаться на дому
have a peek at this site Hacking software (e.g., keyloggers, malware)
вывести из запоя екатеринбург вывести из запоя екатеринбург
капельница екатеринбург цены https://kapelnicza-ot-pokhmelya-ekaterinburg-16.ru
Обучили всех операторов работе с техникой за три дня. Индивидуальный подход к каждому — кто-то новичок, кто-то уже работал с другими моделями. Теперь справляются самостоятельно. оригинальные запчасти спецтехника
Discover More Stolen funds in digital wallets
her explanation Banking data theft
here are the findings Access to private or restricted databases
Top round face haircuts for a flattering, balanced look. Outlined below is a practical walkthrough that explains crown height, side-swept fringe, and below-jaw layering, opening with why round faces benefit from vertical emphasis. Another part examines texture strategies for fine versus thick round-face hair. In addition, it outlines daily styling time for volume at the crown. You can read the complete guide at https://ext-6970372.livejournal.com/343.html for readers seeking elongating options on a round face.
Наркологическая клиника в Балашихе предлагает полный спектр услуг: от экстренного выведения из запоя и снятия ломки до длительной реабилитации и психологической поддержки. Наша наркологическая служба работает без выходных, и вы всегда можете получить помощь анонимно, без постановки на учет. В лечении алкоголизма мы используем только проверенные методики, а каждый пациент получает персональную программу терапии, учитывающую стаж употребления, стадию болезни, возраст и сопутствующие хронические заболевания. Лечение в клинике или амбулаторно на дому — решение, которое принимается после осмотра врача. Если состояние больного позволяет, вывод из запоя можно провести в домашних условиях, но в тяжелых случаях необходима срочная госпитализация в стационар, где обеспечен круглосуточный контроль докторов. Лечением алкогольной зависимости занимаются опытные психиатры, психологи и наркологи, каждый из которых вносит вклад в общее дело.
Ознакомиться с деталями – https://narkolog-na-dom-balashiha13-1.ru/
More hints Fullz (personal data sets)
вывод из запоя капельница на дому вывод из запоя капельница на дому
Por que ninguém fala do Hood vs Wolf? É bom demais ou ruim demais?
helpful resources Account access (logins and passwords)
Buscas long-tail em Candy Bonanza ficaram mais específicas em 2026. Galera pede variância, não vibes.
Related Site Fake documents (e.g., passports, driver’s licenses)
Can you be more specific about the content of your article? After reading it, I still have some doubts. Hope you can help me.
look at here Account access (logins and passwords)
basics Exploit kits and software vulnerabilities for illegal access
Greetings folks!
Check out https://995bdt1.com/
This is a new gaming platform called 995BDT.
No deposit needed every day.
Works on mobile and PC.
Go check it and see for yourself.
Have fun!
наркология вывод из запоя в стационаре наркология вывод из запоя в стационаре
Melhor horário pra jogar Santa’s Gift Rush no fim de semana — alguém tem dado real?
property for sale in phuket property for sale in phuket
his response Banking data theft
see page ZeroDay Darknet Market
This is really interesting, You’re a very skilled blogger. I have joined your feed and look forward to seeking more of your fantastic post. Also, I have shared your website in my social networks!
from this source Fullz (personal data sets)
helpful resources Exploit kits and software vulnerabilities for illegal access
вывод из запоя с выездом на дом цена вывод из запоя с выездом на дом цена
reference Exploit kits and software vulnerabilities for illegal access
my explanation Fullz (personal data sets)
выведение из запоя на дому выведение из запоя на дому
100cuci apk 100cuci apk
кодирование от алкоголизма стационар кодирование от алкоголизма стационар
internet Digital logs (session logs, access logs, activity logs)
электрокарниз недорого https://elektrokarniz150.ru
прокапаться на дому от алкоголя цена прокапаться на дому от алкоголя цена
Thanks For This Blog, was added to my bookmarks.
Read Full Article leap wallet x official
linked here dmail mail
visit our website dmail token
explanation dmail usdt
Homepage dmail usdt
official website dmail token
view website dmail mail
нарколог на дом вывод из запоя на дому нарколог на дом вывод из запоя на дому
капельница екатеринбург цены https://kapelnicza-ot-pokhmelya-ekaterinburg-16.ru
his response dmail network foundation ltd
his explanation dmail airdrop
read dmail twitter
basics dmail token
Our site dmail login
blog link dmail twitter
visit the website dmail price
find out this here dmail login
casino game of war
best site dmail network foundation ltd
anonymous dmail network foundation ltd
try this web-site dmail network foundation ltd
official site dmail network foundation ltd
click this site dmail network foundation ltd
check this site out dmail mail
visit site dmail login
browse around here coin leap app
these details dmail airdrop
redirected here dmail depin union partnership
straight from the source dmail network
i loved this leap wallet features
next dmail token
take a look at the site here dmail twitter
important site dmail login
her latest blog dmail network foundation ltd
click this dmail twitter
basics dmail usdt
property for sale in phuket thailand property for sale in phuket thailand
E o Tigre que meteu um Super Mega Win do nada? Zerei a vida hoje. Levei 5 mil conto!
pop over to this website dmail network foundation ltd
E aí galera, Mines tá on fire agora de noite. Saque de R$ 1.000 já na conta.
Click This Link leap wallet dashboard
find more information dmail twitter
click for source dmail login
helpful hints dmail twitter
go to this web-site dmail depin union partnership
published here dmail depin union partnership
browse around here dmail token
see it here dmail network foundation ltd
i was reading this dmail network
Girei um pouco no Aviator hoje de manhã e já tô com R$ 50 no lucro. Aí sim.
site link dmail login
published here leap wallet features
see here dmail token
see this dmail airdrop
наркологическая клиника со стационаром наркологическая клиника со стационаром
jeetwin online casino
click over here now dmail twitter
trusted casino malaysia trusted casino malaysia
see post dmail network
Recommended Site dmail token
прокапаться от алкоголя цены прокапаться от алкоголя цены
More Info dmail network
check dmail token
Read Full Article dmail airdrop
their explanation dmail network
blog dmail mail
explanation dmail login
more info here dmail airdrop
additional reading dmail token
discover this dmail twitter
go to my site dmail twitter
read this dmail price
navigate here dmail mail
more info here dmail twitter
you could check here dmail login
website link dmail depin union partnership
find out here dmail price
наркология воронеж наркология воронеж
webpage dmail depin union partnership
вывод из запоя стационар вывод из запоя стационар
Website dmail mail
вызов нарколога на дом анонимно вызов нарколога на дом анонимно
see this dmail twitter
Увеличьте видимость вашего бизнеса в интернете с помощью качественного
https://msk.mihaylov.digital/juzabiliti-audit/
Комплексное SEO обеспечивает стабильный рост посещаемости и конверсий.
выведение из запоя в стационаре самара выведение из запоя в стационаре самара
прокапаться от алкоголя самара прокапаться от алкоголя самара
Go Here dmail mail
Get More Info dmail usdt
наркологическая помощь на дому москва наркологическая помощь на дому москва
you can find out more dmail token
visit this website dmail twitter
электрические карнизы купить электрические карнизы купить
discover this info here dmail price
read the article dmail network foundation ltd
find out here dmail network
наркологический стационар наркологический стационар
over here dmail twitter
phuket thailand property for sale phuket thailand property for sale
дезинфекция в Санкт-Петербурге
https://dezinfection-v-spb.click/deratizaciya/ot-krys/
a knockout post dmail mail
100cuci promo code 100cuci promo code
find this dmail network
По теме “Свежие новости Томской области и мира”, есть отличная статья.
Вот, делюсь ссылкой:
https://media89.ru
автоматический карниз для штор автоматический карниз для штор
наркологическая служба наркологическая служба
вывод из запоя в стационаре вывод из запоя в стационаре
врач нарколог выезд на дом врач нарколог выезд на дом
врач нарколог вызов на дом врач нарколог вызов на дом
капельница от алкоголя цена капельница от алкоголя цена
вызов психиатра нарколога на дом вызов психиатра нарколога на дом
дом запой цена дом запой цена
O multiplicador estourou no Ninja vs Samurai! Foi um Multiplicador de 50x absurdo, coisa de mais de 10k.
Terminando a sessão no Roleta com sorriso no rosto e uma grana boa na conta.
нарколог стационар нарколог стационар
Tava precisando dessa vitória. Sugar Rush mandou bem demais no fim de semana.
investment property phuket investment property phuket
casino bonus malaysia casino bonus malaysia
готовые рулонные шторы цена https://rulonnye-shtory-s-elektroprivodom11.ru
вызвать нарколога вызвать нарколога
Читать далее vodka bet casino
нажмите здесь vodka bet
посетить сайт водка бет
реабилитация наркозависимых стационар реабилитация наркозависимых стационар
вызвать капельницу от запоя на дому вызвать капельницу от запоя на дому
нарколог на дом москва нарколог на дом москва
капельница от запоя стоимость капельница от запоя стоимость
нажмите водка бет
можно проверить ЗДЕСЬ vodkabet
интернет водка бет
Choosing a haircut based on face shape starts with geometry, not trends. Outlined below is a clear framework covering the path from mirror tracing to shape-specific recommendations, so each silhouette gets length, fringe, and parting guidance. Additionally, the text explains why the same trend reads differently on different bone structures. Beyond that, it notes virtual previews as a planning step. Access all sections here: https://sites.google.com/view/best-haircuts-for-your-face-sh/ when you want every section in one continuous read.
нажмите, чтобы подробнее vodka bet
такой водкабет казино
наркологическая клиника телефон наркологическая клиника телефон
здесь водкабет казино
Особенно понравился материал про Новости футбола и спорта Северной столицы.
Вот, делюсь ссылкой:
https://fantottenham.ru
быстрый вывод из запоя в стационаре быстрый вывод из запоя в стационаре
вызвать нарколога на дом москва цены вызвать нарколога на дом москва цены
смотреть здесь vodkabet прямо сейчас
найти это vodka bet
зайти на сайт водка бет
подробнее здесь vodka bet
Смотреть здесь водка бет
Главная vodkabet
Источник водка бэт
перенаправляется сюда водка бэт
электрические рулонные шторы на окна электрические рулонные шторы на окна
phuket homes for sale phuket homes for sale
Читать далее водкабет казино
ссылка на сайт vodka bet casino
сайт водка бэт
интернет вотка бет
Источник зеркало водка бет
взгляните на сайте здесь vodkabet
Читать далее водка бет
сайт водка бет
Читать далее vodka bet
смотреть здесь vodkabet
читать вотка бет
сайт зеркало водка бет
ссылка на сайт vodkabet
Перейти на сайт vodkabet прямо сейчас
этот сайт vodka bet
каталог vodkabet
Greetings! This is my first visit to your blog! We are a collection of volunteers and starting a new initiative in a community in the same niche. Your blog provided us beneficial information. You have done a wonderful job!
подробнее vodka bet casino
вызвать наркологическую помощь вызвать наркологическую помощь
перейдите на этот сайт водка бет
наркологическая клиника стационар наркологическая клиника стационар
нажмите здесь водка бет
здесь vodka bet
узнать больше Здесь vodka bet
узнать больше vodkabet
Коллеги, хороший материал с практическими рекомендациями по выбору SEO для регионального бизнеса. Автор подробно останавливается на локальных ключевых словах, оптимизации контента, работе с картами и каталогами, а также важности отзывов для репутации. Есть блок про ссылочное продвижение и аналитику. Очень структурированно: https://bioice-krasnoyarsk.ru/stati/kak-vybrat-jeffektivnoe-seo-prodvizhenie-dlja-biznesa-v-regione-prakticheskie-rekomendacii/
этот сайт зеркало водка бет
Hello there! I really enjoy reading your blog! If you keep making amazing posts like this I will come back every day to keep reading.
перенаправляется сюда vodkabet
подробнее вотка бет
продолжить зеркало водка бет
Excellent article!! I am an avid reader of your website:D keep on posting that good content. and I’ll be a regular visitor for a very long time!!
посмотреть в этом разделе водка бет
капельница после запоя цена капельница после запоя цена
найти это vodkabet прямо сейчас
страница водка бэт
капельница от запоя круглосуточно капельница от запоя круглосуточно
врач нарколог выезд на дом москва цена врач нарколог выезд на дом москва цена
Узнать больше вотка бет
ссылка на сайт водка бэт
этот сайт vodkabet прямо сейчас
выберите ресурсы водка бэт
лечение алкоголизма воронеж лечение алкоголизма воронеж
запой санкт петербург запой санкт петербург
Смотреть здесь водка бэт
нажмите, чтобы подробнее водка бет
выезд нарколога на дом цена выезд нарколога на дом цена
платная наркологическая помощь на дому платная наркологическая помощь на дому
продолжить зеркало водка бет
на этом сайте vodka bet
опубликовано здесь vodka bet
зайти на сайт vodkabet прямо сейчас
узнать водкабет казино
читать вотка бет
Подробнее vodkabet прямо сейчас
продолжить vodka bet
зайти на сайт водка бэт
intelligence test online intelligence test online
зайти на сайт vodka bet
перенаправляется сюда vodka bet casino
узнать больше водка бэт
найти это vodkabet
страница водка бет
нажмите здесь vodka bet
вызов наркологической помощи на дом вызов наркологической помощи на дом
взгляните на сайте здесь водкабет казино
нарколог стационар нарколог стационар
Перейти на сайт vodka bet casino
нажмите, чтобы подробнее водкабет казино
Of course, what a great site and informative posts, I will add backlink – bookmark this site? Regards, Reader
Коллеги, это полноценное руководство по выбору SEO-стратегии! Автор разбирает три модели продвижения: по позициям, по трафику и с оплатой за лиды. Отдельно радует блок про выбор подрядчика — как не ошибиться, какие вопросы задавать и почему не стоит верить обещаниям «быстрого топа». Есть чек-лист готовности бизнеса к SEO. Очень рекомендую: https://mandaringpd.ru/stati/kak-vybrat-jeffektivnoe-seo-prodvizhenie-dlja-biznesa-polnoe-rukovodstvo-po-vyboru-strategii/
алкогольные капельницы алкогольные капельницы
прокапаться от алкоголя самара прокапаться от алкоголя самара
нарколог дешево на дом нарколог дешево на дом
нажмите, чтобы подробнее водка бэт
взгляните на сайте здесь водка бэт
платная наркологическая клиника платная наркологическая клиника
кликните сюда vodkabet
частный нарколог частный нарколог
посмотреть на этом сайте водка бет
вывод из запоя стационар вывод из запоя стационар
можно проверить ЗДЕСЬ водкабет казино
Подробнее vodka bet
нажмите здесь вотка бет
Главная вотка бет
подробнее vodkabet
наркологическая клиника телефон наркологическая клиника телефон
Следующая страница водкабет казино
poker online for money us
вызов нарколога на дом круглосуточно вызов нарколога на дом круглосуточно
посетить веб-сайт vodkabet
сюда водка бет
check https://www.houseofnova.nl/collections/lysergamides
visit https://www.houseofnova.nl/sitemap.xml
a fantastic read https://www.houseofnova.nl/collections/others
free iq test free iq test
check my site https://www.houseofnova.nl
веб-сайт vodka bet
check this https://www.houseofnova.nl
read more https://www.houseofnova.nl/collections/pellets
Перейти на сайт vodkabet
hop over to here https://www.houseofnova.nl/collections/pellets
informative post https://www.houseofnova.nl/collections/tryptamines
try this https://www.houseofnova.nl/collections/liquid-rcs
review https://www.houseofnova.nl/collections/tryptamines
check my reference https://www.houseofnova.nl/collections/arylcyclohexylamine
site web https://www.houseofnova.nl/collections/arylcyclohexylamine
Следующая страница водка бэт
Home Page https://www.houseofnova.nl/collections/arylcyclohexylamine
company website https://www.houseofnova.nl/collections/arylcyclohexylamine
взгляните на сайте здесь зеркало водка бет
click to read https://www.houseofnova.nl/sitemap.xml
find out https://www.houseofnova.nl/sitemap.xml
кодирование от алкоголизма на дому в екатеринбурге кодирование от алкоголизма на дому в екатеринбурге
узнать больше водка бет
Смотреть здесь vodka bet casino
перейдите на этот сайт vodkabet прямо сейчас
this contact form https://www.houseofnova.nl/collections/tryptamines
moved here https://www.houseofnova.nl/collections/tryptamines
веб-сайт вотка бет
try this website https://www.houseofnova.nl/collections/tryptamines
“kuruyemis kalori” konusu icin cok faydal? bir yaz? buldum. Iste link: https://sporatelier.com/articles/100-gram-kuruyemis-kalori-miktari/
перенаправляется сюда vodkabet
have a peek at these guys https://www.houseofnova.nl/collections/lysergamides
реабилитация наркозависимых стационар реабилитация наркозависимых стационар
веб-сайте водка бэт
official website https://www.houseofnova.nl/collections/others
Look At This https://www.houseofnova.nl/collections/liquid-rcs
Get More Info https://www.houseofnova.nl/collections/others
official site https://www.houseofnova.nl/collections/arylcyclohexylamine
зайти на сайт vodkabet
directory https://www.houseofnova.nl/collections/tryptamines
monopoly live scaricare app https://monopoly-live-bd.com/
crazy time. https://crazytimeee.com/
прокапаться от алкоголя самара прокапаться от алкоголя самара
Читать далее vodka bet
нажмите здесь вотка бет
кликните сюда vodka bet casino
можно проверить ЗДЕСЬ vodka bet
take a look at the site here https://www.houseofnova.nl/
top article https://www.houseofnova.nl/collections/lysergamides
кликните сюда vodka bet
вызов врача нарколога вызов врача нарколога
веб-сайт водка бэт
посмотреть на этом сайте водка бет
в этом разделе зеркало водка бет
check these guys out https://www.houseofnova.nl/collections/tryptamines
original site https://www.houseofnova.nl/collections/others
pop over to this website https://www.houseofnova.nl/sitemap.xml
ссылка на сайт vodka bet
my site https://www.houseofnova.nl/collections/pellets
капельница от запоя стоимость капельница от запоя стоимость
read the article https://www.houseofnova.nl/collections/arylcyclohexylamine
узнать водка бэт
click here now https://www.houseofnova.nl/collections/lysergamides
читать водка бэт
additional info https://www.houseofnova.nl/sitemap.xml
доктор нарколог на дом доктор нарколог на дом
лечение алкоголизма анонимно https://narkologicheskaya-pomoshh-voronezh-11.ru
клиника плюс воронеж клиника плюс воронеж
цена вывода из запоя в стационаре цена вывода из запоя в стационаре
наркологическая помощь на дому москва наркологическая помощь на дому москва
ссылка на сайт вотка бет
click here to find out more https://www.houseofnova.nl/collections/liquid-rcs
original site https://www.houseofnova.nl/collections/pellets
Discover More https://www.houseofnova.nl/
free legit iq test free legit iq test
have a peek here https://www.houseofnova.nl/collections/lysergamides
visit https://www.houseofnova.nl
кликните сюда водка бэт
Website https://www.houseofnova.nl/collections/arylcyclohexylamine
visite site https://www.houseofnova.nl/collections/liquid-rcs
Check Out Your URL https://www.houseofnova.nl/
click this site https://www.houseofnova.nl/collections/others
article source https://www.houseofnova.nl/collections/arylcyclohexylamine
navigate here https://www.houseofnova.nl
why not find out more https://www.houseofnova.nl/collections/tryptamines
read https://www.houseofnova.nl
other https://www.houseofnova.nl/sitemap.xml
подробнее vodkabet
go to my blog https://www.houseofnova.nl/
кодирование от алкоголизма стационар кодирование от алкоголизма стационар
go to these guys https://www.houseofnova.nl/sitemap.xml
можно проверить ЗДЕСЬ водка бэт
нажмите здесь водка бет
try here https://www.houseofnova.nl/collections/liquid-rcs
this page https://www.houseofnova.nl/collections/liquid-rcs
get more https://www.houseofnova.nl/collections/arylcyclohexylamine
Website https://www.houseofnova.nl/
продолжить vodkabet прямо сейчас
advice https://www.houseofnova.nl/
hop over to this web-site https://www.houseofnova.nl/collections/liquid-rcs
Смотреть здесь vodkabet прямо сейчас
Resources https://www.houseofnova.nl/
look at this website https://www.houseofnova.nl/collections/pellets
visit the site https://www.houseofnova.nl/sitemap.xml
my blog https://www.houseofnova.nl/collections/arylcyclohexylamine
нажмите, чтобы подробнее вотка бет
можно проверить ЗДЕСЬ vodka bet
browse around this site https://www.houseofnova.nl/collections/arylcyclohexylamine
anchor https://www.houseofnova.nl/collections/others
home https://www.houseofnova.nl/collections/liquid-rcs
pop over to this web-site https://www.houseofnova.nl/collections/tryptamines
лечение алкоголизма анонимно в воронеже https://narkologicheskaya-pomoshh-voronezh-11.ru
нарколог вызов на дом нарколог вызов на дом
сайт vodka bet casino
пояснения vodkabet прямо сейчас
нажмите здесь зеркало водка бет
узнать вотка бет
наркологическая помощь наркологическая помощь
ссылка на сайт зеркало водка бет
рулонные шторы окна заказ https://rulonnye-shtory-s-elektroprivodom11.ru
вывести из алкогольного запоя стационар вывести из алкогольного запоя стационар
кодировка от наркотиков кодировка от наркотиков
помощь при запое нарколог на дом помощь при запое нарколог на дом
лечение алкоголизма воронеж бесплатно https://narkologicheskaya-pomoshh-voronezh-12.ru
iq testing iq testing
нарколога на дом нарколога на дом
наркология вывод из запоя в стационаре наркология вывод из запоя в стационаре
Tá on fire.
Bikini Paradise salvou o dia! lucro alto pro bolso. Saque via PIX é vida.
здесь vodkabet прямо сейчас
нарколог стационар спб нарколог стационар спб
Следующая страница водка бет
Saque feito.
Boa noite e green pra todos.
the original source Fullz (personal data sets)
нажмите, чтобы подробнее vodka bet
частная наркологическая помощь https://narkologicheskaya-pomoshh-voronezh-11.ru
перенаправляется сюда vodka bet
Bu arada, eger cat? kat? proje ornekleri konusuyla ilgileniyorsan?z, buray? inceleyin. Suradan okuyabilirsiniz: https://yappendik.com/articles/cati-kati-oda-dekorasyonu-modern-tasarim-fikirleri/
нарколог на дом телефон нарколог на дом телефон
redirected here Account access (logins and passwords)
перейти на сайт водка бет
кодирование от алкоголизма нижний новгород кодирование от алкоголизма нижний новгород
check these guys out Remote access services (RDP, SSH)
Plataforma pagando liso. Saquei R$ 2.000 do Roleta em 2 minutos via PIX.
see post https://www.houseofnova.nl
read this https://www.houseofnova.nl/collections/others
электрические рулонные шторы на окна электрические рулонные шторы на окна
Top demais. O Fortune Tiger não para de soltar carta boa. Saber a hora de parar é a maior habilidade.
психиатр нарколог нижний новгород психиатр нарколог нижний новгород
наркологическая служба на дом наркологическая служба на дом
вызов на дом нарколога вызов на дом нарколога
вывод из запоя цена наркология вывод из запоя цена наркология
каталог водка бет
вывод из запоя стационар вывод из запоя стационар
лечение наркомании воронеж лечение наркомании воронеж
free iq test with instant results free iq test with instant results
click now ZeroDay Darknet Market
посмотреть на этом сайте vodka bet
анонимная наркологическая клиника https://narkologicheskaya-pomoshh-voronezh-11.ru
try this site Fullz (personal data sets)
продолжить vodka bet
Source https://www.houseofnova.nl/collections/arylcyclohexylamine
услуги нарколога на дому услуги нарколога на дому
my blog https://www.houseofnova.nl/collections/lysergamides
врач нарколог круглосуточно врач нарколог круглосуточно
узнать больше казино водка бет vodkabet
выберите ресурсы vodka bet
Следующая страница vodkabet прямо сейчас
здесь водка бэт
лечение алкогольной зависимости нижний новгород лечение алкогольной зависимости нижний новгород
взгляните на сайте здесь vodkabet новый сайт
Styling ideas when the goal is harmony, not hiding your features. Readers can explore a structured overview on hairstyles suited to fuller face shapes, beginning with below-jaw lengths and side-swept fringe. It also covers why tight pulled-back styles can emphasize roundness. At the same time, it encourages communicating lifestyle honestly to your stylist. The entire text appears at https://pagedrop.dev/s/33nWfDE9/ for readers with a fuller face comparing framing options.
рулонные шторы на кухню купить https://rulonnye-shtory-s-elektroprivodom11.ru
веб-сайт водкабет
вывод из запоя спб стационар вывод из запоя спб стационар
экстренная наркологическая помощь на дому экстренная наркологическая помощь на дому
срочная наркологическая помощь срочная наркологическая помощь
нарколог домой нарколог домой
кодировка от алкоголя в нижнем новгороде кодировка от алкоголя в нижнем новгороде
капельница от алкоголя в стационаре капельница от алкоголя в стационаре
intelligence test online intelligence test online
смотреть здесь vodka bet casino
анонимная скорая наркологическая помощь https://narkologicheskaya-pomoshh-voronezh-11.ru
веб-сайт vodkabet
click here for info https://www.houseofnova.nl/
find more info https://www.houseofnova.nl/collections/others
нажмите здесь водкабет казино
site link https://www.houseofnova.nl/collections/arylcyclohexylamine
special info https://www.houseofnova.nl/collections/pellets
врач нарколог на дом круглосуточно врач нарколог на дом круглосуточно
Коллеги, это стратегическое руководство РїРѕ выбору SEO-продвижения! Автор разбирает 6 ключевых шагов: РѕС‚ определения бизнес-целей (РЅРµ просто «позиции», Р° конверсия) РґРѕ оценки состояния сайта, контент-стратегии (E-E-A-T), выбора модели взаимодействия (агентство/фриланс/инхаус), трендов (РР, локальное SEO, поведенческие факторы) Рё бюджетирования. Особенно ценно РїСЂРѕ СЃСЂРѕРєРё — SEO это марафон РЅР° 6–12 месяцев. Обязательно Рє прочтению: https://frankbooks.ru/stati/kak-vybrat-jeffektivnoe-seo-prodvizhenie-dlja-biznesa-strategischeskoe-rukovodstvo/
La movilidad en las grandes ciudades esta llegando a un punto de saturacion preocupante, lo que afecta directamente la calidad de vida de millones de usuarios.
La falta de recursos no solo degrada el servicio, sino que genera cuellos de botella insostenibles. La reduccion de frecuencias и el descuido de la infraestructura provocan retrasos masivos, dejando a los ciudadanos sin alternativas eficientes de traslado.
Les comparto una serie de recursos que explican por que el transporte esta en crisis::
Leer mas: http://gzew.phorum.pl/viewtopic.php?p=739783#739783
?Saludos и que mejore la movilidad en nuestras ciudades!
Been using sandiego-aviator.com for a couple weeks now and the interface is pretty intuitive, makes navigation super easy. My only complaint is the account verification took longer than I expected, but once it was done everything ran smoothly. 777bet
кодирование от алкоголизма кодирование от алкоголизма
сюда водка бет
вызов нарколога на дом телефон вызов нарколога на дом телефон
вывод из запоя лечение алкоголизма вывод из запоя лечение алкоголизма
лечение алкоголизма воронеж лечение алкоголизма воронеж
нарколог лечение на дому нарколог лечение на дому
вывод из запоя в стационаре вывод из запоя в стационаре
наркологический центр нижний новгород наркологический центр нижний новгород
в этом разделе vodkabet прямо сейчас
анонимное лечение от алкоголизма http://www.narkologicheskaya-pomoshh-voronezh-13.ru
вывод из запоя стационар вывод из запоя стационар
выведение из запоя в стационаре наркологии выведение из запоя в стационаре наркологии
helpful hints https://www.houseofnova.nl
услуги нарколога на дом услуги нарколога на дом
Отличный материал для тех, кто хочет системно подойти к выбору SEO. Автор предлагает начать с определения целей и задач, затем провести анализ конкурентов и исследование ключевых слов. Отдельные разделы — про оптимизацию сайта, создание контента, линкбилдинг и мониторинг результатов. Есть блок про локальные сигналы и работу с Google My Business. Почитайте: https://admtog.ru/stati/kak-vybrat-jeffektivnoe-seo-prodvizhenie-dlja-biznesa-v-regione/
click https://www.houseofnova.nl/
кодирование от алкоголизма кодирование от алкоголизма
Flattering cuts when horizontal lines would emphasize cheek width. Readers can explore a practical walkthrough that explains crown height, side-swept fringe, and below-jaw layering, opening with why round faces benefit from vertical emphasis. It also covers why blunt chin-length bobs can read wider on round outlines. At the same time, it encourages honest dialogue about routine with your stylist. You can read the complete guide at https://ext-6970372.livejournal.com/343.html for readers seeking elongating options on a round face.
my site https://www.houseofnova.nl/collections/lysergamides
платный нарколог на дом анонимно платный нарколог на дом анонимно
наркология вывод из запоя в стационаре спб наркология вывод из запоя в стационаре спб
наркологическая помощь на дому в москве круглосуточно наркологическая помощь на дому в москве круглосуточно
лечение наркомании в воронеже лечение наркомании в воронеже
нарколог подростковый нарколог подростковый
выведение из запоя стационар выведение из запоя стационар
анонимное лечение алкоголизма анонимное лечение алкоголизма
стационар для вывода из запоя стационар для вывода из запоя
капельница от алкоголя стационар капельница от алкоголя стационар
This Site https://www.houseofnova.nl/collections/liquid-rcs
Incrível como o Caishen Wins respeita quem tem paciência. Hoje forrei nele.
вывод из запоя с выездом на дом вывод из запоя с выездом на дом
рулонные шторы на створку https://rulonnye-shtory-s-elektroprivodom11.ru
Não sou de postar muito, mas o Ganesha Gold brilhou hoje. Gestão é tudo.
why not check here https://www.houseofnova.nl/collections/arylcyclohexylamine
E aí galera, Lucky Neko tá on fire hoje de manhã. Saque de duzentão já na conta.
visit site https://www.houseofnova.nl/collections/pellets
Перейти на сайт зеркало водка бет
O segredo é esperar. Demorou, mas veio o Mega Win no Hood vs Wolf. 10k limpo.
Hoje o Leprechaun Riches tava uma mãe. Forrei sem passar calor. O lucro só é lucro quando tá na conta bancária.
view website https://www.houseofnova.nl/collections/pellets
клиника лечения зависимостей клиника лечения зависимостей
наркология наркология
лечение алкоголизма на дому в москве лечение алкоголизма на дому в москве
веб-сайте водка бэт
выход из запоя стационар выход из запоя стационар
вывод из запоя доктор на дом вывод из запоя доктор на дом
выведение из запоя в стационаре спб выведение из запоя в стационаре спб
наркологическая служба наркологическая служба
site here https://www.houseofnova.nl/collections/arylcyclohexylamine
прокапаться от алкоголя в стационаре прокапаться от алкоголя в стационаре
вывод из запоя цена наркология вывод из запоя цена наркология
Forrei forte.
Discover More https://www.houseofnova.nl/collections/liquid-rcs
Forrei hoje.
A sensação de pedir saque de R$ 50 depois de jogar Hood vs Wolf é boa demais.
Testando horários no Candy Bonanza e ontem à noite foi o melhor. Bateu a meta, fecha o app.
this hyperlink https://www.houseofnova.nl/collections/pellets
How to choose a haircut that fits your features for every face and hair type. Outlined in this piece is a structured walkthrough on how to choose a haircut, with guidance on which silhouettes balance width and height. Additionally, the text covers how hair texture differs from density. Beyond that, it outlines salon consultation habits and reference photos. The detailed version lives at https://hairpick.weebly.com/ for those comparing cuts ahead of a salon or barbershop visit.
анонимный врач нарколог на дом анонимный врач нарколог на дом
Bônus do Buffalo Win agora pouco veio na hora certa! uma grana boa direto no PIX.
лечение наркомании в воронеже лечение наркомании в воронеже
лечение запоя в стационаре лечение запоя в стационаре
каталог водка бэт
Смотреть здесь зеркало водка бет
вызвать нарколога на дом срочно вызвать нарколога на дом срочно
Testando horários no Ninja vs Samurai e agora de noite foi o melhor. Sem ganância o resultado vem.
вывод из запоя диспансер вывод из запоя диспансер
Forra matinal no Candy Bonanza. R$ 200 garantidos pro churrasco do fim de semana.
Incrível como o Rabbit respeita quem tem paciência. Hoje forrei nele.
плюс плюс
visit dmail network
Zerei o game.
Sempre via os vídeos de Forra Monstra, hoje foi minha vez no Gato! R$ 8.000 garantidos. Chamei até a minha esposa pra ver.
Ainda tô em choque. Multiplicador 100x lindo no Fortune Mouse. Tô tremendo até agora! Já pedi o saque de R$ 15.000.
Incrível como o Sugar Rush respeita quem tem paciência. Hoje forrei nele.
лечение алкоголизма последних стадий в спб лечение алкоголизма последних стадий в спб
Girei um pouco no Piggy Gold no fim de semana e já tô com R$ 200 no lucro. Sensacional!
Isso sim é forra de verdade! Carta de 50x no Candy Bonanza rendeu 20k no PIX.
my latest blog post https://my-fav.net/
More Bonuses https://shinycloud.net/
Dica de ouro: Caishen Wins depois do almoço. Pagou quinhentão liso pra mim.
blog link https://tokvideodownloader.click/fr/
click here to investigate https://tokvideodownloader.click/fr/
наркологическая клиника наркологическая клиника
капельница от алкоголя в стационаре капельница от алкоголя в стационаре
Go Here https://tokvideodownloader.click/fr/
read this https://tokvideodownloader.click/fr/
Get More Information https://my-fav.net/
website here https://shiny-cloud.net
Continue https://cloudy-host.com
highway-casino-canada.com/free-chips/
site here https://tokvideodownloader.click/fr/
Website https://shinycloud.net/
why not try these out https://megatonweb.com/
use this link https://tokvideodownloader.click/fr/
try this site https://cloudy-host.com/
great site https://tokvideodownloader.click/fr/
вывод из запоя в стационаре в спб вывод из запоя в стационаре в спб
see this page https://shinycloud.net
additional info https://tokvideodownloader.click/tiktok-download-mp3.html
click now https://tokvideodownloader.click/fr/
click to read https://cloudy-host.com
page https://tokvideodownloader.click/bn/
read more https://tokvideodownloader.click/fr/
blog https://tokvideodownloader.click/fr/
check that https://tokvideodownloader.click/fr/
в этом разделе onlyfake platform
Good day everyone, I came across this platform called WCET and thought I would share my initial thoughts with the community. The site appears to be well organized and the navigation is quite intuitive. I found it rather usefull for my needs. Should you wish to investigate further, you may find it here: batara vip login alternatif Best regards to all.
на этом сайте document generation service
my company https://tokvideodownloader.click/fr/
my website https://cloudy-host.com
зайти на сайт online document service
Смотреть здесь onlyfake document generator
discover this info here https://tokvideodownloader.click/fr/
Plataforma pagando liso. Saquei R$ 100 do Buffalo Win em 2 minutos via PIX.
site https://tokvideodownloader.click/fr/
посмотреть в этом разделе onlyfake сервис документов
important site https://adaptive-cloud.net
check that https://megatonweb.com/
official website https://tokvideodownloader.click/fr/
перейти на сайт online document service
Não tem como não amar o Ninja vs Samurai quando ele solta um Mega Win. Surreal!
This Site https://megatonweb.com
Hoje foi lucro puro.
i thought about this https://megatonweb.com/
Terminando a sessão no Candy Bonanza com sorriso no rosto e R$ 1.000 na conta.
go to the website https://my-fav.net/
next page https://my-fav.net
review https://tokvideodownloader.click/fr/
продолжить создание документов онлайн
straight from the source https://megatonweb.com
look at here https://tokvideodownloader.click/fr/
Click Here https://my-fav.net
look at this now https://tokvideodownloader.click/fr/
посетить веб-сайт document creation platform
discover this info here https://adaptive-cloud.net/
веб-сайте onlyfake сервис документов
Home Page https://tokvideodownloader.click/ar/
сайт генератор документов
helpful site https://shinycloud.net/
A banca agradece! o valor da meta sacados do Blackjack com sucesso.
страница onlyfake platform
Подробнее здесь online document generator
Girei no automático e, quando olhei, tava o Forra Monstra no Hood vs Wolf. R$ 15.000! Chamei até a minha esposa pra ver.
Essa madrugada o Treasures of Aztec tava insano. Alavancagem de cemzão.
here https://tokvideodownloader.click/fr/
подробнее здесь onlyfake online service
a fantastic read https://shiny-cloud.net/
Читать далее onlyfake платформа
подробнее automated document generator
Galera, Lucky Neko tá imperdível ontem à noite. Já fiz minha forra.
посетить сайт генератор документов
вывод из запоя в больнице вывод из запоя в больнице
avantgarde-casino-france.com/free-spins/
проверить сайт документ онлайн сервис
Источник onlyfake онлайн генерация
подробнее документ онлайн сервис
подробнее оформление документов онлайн
777bet casino online.
With its wide range of games, enticing promotions, and intuitive interface, this site appeals to many players.
нажмите здесь onlyfake платформа
можно проверить ЗДЕСЬ onlyfake платформа
здесь realistic digital documents
подробнее onlyfake сервис документов
click to read https://shinycloud.net
O Buffalo Win tá pagando muito na virada do dia! Já fiz o PIX de R$ 500.
читать цифровые документы онлайн
продолжить realistic digital documents
этот контент генератор документов
узнать больше onlyfake document generator
Respeitei meu limite, fui no Lucky Neko e saí no green. Respeita o stop-win.
ссылка на сайт шаблоны документов
Смотреть здесь сервис генерации документов
перейти на сайт onlyfake official website
Galera, Fortune Tiger tá imperdível hoje de manhã. Já fiz minha forra.
monopoly big baller strategy https://monopoly-live-bd.com/
these details https://megatonweb.com
Подробнее onlyfake платформа
найти это high quality document templates
нажмите здесь профессиональная генерация документов
продолжить high quality document templates
посмотреть в этом разделе digital document templates
узнать больше генератор документов
my link https://adaptive-cloud.net
vulkan platinum casino https://play24-vulkan.com/
продолжить online document service
содержание onlyfake генератор документов
Продолжение автоматическая генерация документов
Перейти на сайт onlyfake platform
подробнее realistic digital documents
выберите ресурсы document creation platform
веб-сайте автоматическая генерация документов
Tava quase zerando a banca, aí o Mahjong me solta um Big Win. Subiu pra 10k!
Get the facts https://shinycloud.net
каталог создание документов онлайн
узнать больше автоматическая генерация документов
great post to read https://my-fav.net
address https://shiny-cloud.net/
click now https://cloudy-host.com
узнать onlyfake платформа
проверить сайт создание документов онлайн
посетить веб-сайт onlyfake document generator
Learn More Here https://tokvideodownloader.click/fr/
узнать больше сервис генерации документов
узнать onlyfake platform
Go Here https://cloudy-host.com
читать цифровые документы онлайн
можно проверить ЗДЕСЬ onlyfake platform
подробнее здесь professional document generation
пояснения цифровые документы онлайн
перейти на сайт high quality document templates
содержание onlyfake platform
versailles-casino-france.com/
click over here now https://shinycloud.net/
подробнее сервис для создания цифровых документов
страница digital document templates
здесь digital document templates
discover here https://tokvideodownloader.click/fr/
useful content https://tokvideodownloader.click/fr/
find out this here https://my-fav.net
you can check here https://shiny-cloud.net/
betfinal.com https://betfinalafrica.com/
check here https://cloudy-host.com/
вызвать врача нарколога на дом москва вызвать врача нарколога на дом москва
pop over here https://tokvideodownloader.click/fr/
сколько стоит капельницы на дому сколько стоит капельницы на дому
сколько стоит капельница от запоя сколько стоит капельница от запоя
look at here now https://my-fav.net/
check it out https://cloudy-host.com/
узнать больше https://ufolabs.xyz/
find https://tokvideodownloader.click/fr/
hop over to this web-site https://cloudy-host.com/
Full Article https://tokvideodownloader.click/fr/
можно проверить ЗДЕСЬ https://ufolabs.io
ссылка на сайт https://ufolabs.cc
i loved this https://shiny-cloud.net
click over here now https://tokvideodownloader.click/fr/
review https://cloudy-host.com
check it out https://tokvideodownloader.click/
visit their website https://megatonweb.com
look at these guys https://my-fav.net
investigate this site https://tokvideodownloader.click/how-to-download-stories.html
click over here https://my-fav.net
Look At This https://tokvideodownloader.click/fr/
about his https://tokvideodownloader.click/fr/
see here now https://tokvideodownloader.click/fr/
my explanation https://shiny-cloud.net/
official statement https://shiny-cloud.net
hop over to here https://tokvideodownloader.click/fr/
view publisher site https://tokvideodownloader.click/how-to-download-stories.html
official website https://tokvideodownloader.click/fr/
Читать далее https://ufolabs.xyz
official source https://shiny-cloud.net
поставить капельницу от алкоголизма поставить капельницу от алкоголизма
Read Full Article https://shiny-cloud.net/
веб-сайте https://ufolabs.io/
content https://tokvideodownloader.click/zh/
company website https://tokvideodownloader.click/fr/
check this https://adaptive-cloud.net
our website https://megatonweb.com/
browse around this web-site https://tokvideodownloader.click/fr/
наркологическая помощь на дому москва https://www.reabilitaciya-alkogolikov-moskva.ru
Testando horários no Tigre e agora à tarde foi o melhor.
check it out https://tokvideodownloader.click/fr/
click for source https://tokvideodownloader.click/fr/
top article https://tokvideodownloader.click/fr/
такой https://ufolabs.xyz/
нажмите здесь зеркало водка бет
Honestly just a solid site that does what its supposed to do without the drama. Aradabet
проверить сайт https://ufolabs.io
click for more dmail price
go now dmail network
веб-сайт https://ufolabs.io
интернет https://ufolabs.xyz
посетить сайт https://ufolabs.io/
Quem falou que Candy Bonanza não paga? Prova viva aqui com uma grana boa sacados.
этот сайт https://ufolabs.xyz/
капельница на дому в самаре цены капельница на дому в самаре цены
Alavancagem perfeita no Piggy Gold agora pouco. O segredo? Mentalidade de investidor sempre.
посмотреть в этом разделе https://ufolabs.cc/
узнать больше https://ufolabs.io
пояснения https://ufolabs.io/
взгляните на сайте здесь https://ufolabs.io/
в этом разделе vodkabet онлайн казино
читать https://ufolabs.io/
проверить сайт https://ufolabs.xyz/
перенаправляется сюда https://ufolabs.cc
перенаправляется сюда https://ufolabs.xyz/
Следующая страница https://ufolabs.xyz
подробнее https://ufolabs.cc/
веб-сайт vodka bet
Tigrinho tá solto.
читать https://ufolabs.io
нажмите здесь https://ufolabs.xyz
посмотреть на этом сайте https://ufolabs.xyz/
подробнее здесь https://ufolabs.cc/
вызвать нарколога на дом москва вызвать нарколога на дом москва
содержание https://ufolabs.io
сюда vodkabet онлайн казино
в этом разделе https://ufolabs.cc
сайт https://ufolabs.cc/
на этом сайте vodka bet casino
веб-сайт https://ufolabs.io/
страница https://ufolabs.io/
Перейти на сайт https://ufolabs.io/
нажмите здесь https://ufolabs.cc/
интернет https://ufolabs.xyz/
Peguei uma sequência linda no Lucky Neko ontem à noite. Sensacional!
Achei que ia dar ruim, de repente a tela trava e vem o Multiplicador 100x. 10k fácil!
сайт vodkabet новый сайт
можно проверить ЗДЕСЬ https://ufolabs.xyz/
продолжить https://ufolabs.cc
Узнать больше https://ufolabs.cc/
сюда https://ufolabs.cc/
можно проверить ЗДЕСЬ https://ufolabs.xyz
опубликовано здесь https://ufolabs.io
капельница после запоя нижний новгород капельница после запоя нижний новгород
Nunca tinha pego um Mega Win tão rápido. na madrugada o Touro pagou 20k.
узнать https://ufolabs.io
Главная https://ufolabs.io/
подробнее здесь https://ufolabs.io/
каталог https://ufolabs.io/
капельница алкоголику капельница алкоголику
Подробнее https://ufolabs.io
Главная https://ufolabs.xyz
выберите ресурсы https://ufolabs.io
веб-сайт https://ufolabs.xyz
Источник https://ufolabs.cc/
здесь https://ufolabs.io
Смотреть здесь https://ufolabs.xyz/
в этом разделе https://ufolabs.io
пояснения https://ufolabs.cc
зайти на сайт https://ufolabs.io
подробнее vodka bet casino
интернет vodkabet онлайн казино
click to investigate dmail depin union partnership
I cannot thank you more than enough for the blogposts on your website. I know you set a lot of time and energy into these and truly hope you know how deeply I appreciate it. I hope I’ll do a similar thing person sooner or later.
услуги нарколога на дому цена http://www.reabilitaciya-alkogolikov-moskva.ru
на этом сайте vodkabet онлайн казино
Managing time efficiently in a fast-paced city like Dubai requires a strategic approach to logistics, and recent articles emphasize the growing importance of business districts.
How do hotel amenities support productivity according to the latest industry insights? Expert reviews suggest that the right amenities can transform a simple stay into a powerful business tool, enabling professionals to stay ahead of the curve.
If you are planning a corporate trip, these links provide valuable information on efficiency and hotel selection:
Full thread: http://www.klub.kobiety.net.pl/ogolny/t-what-role-do-business-districts-play-in-this-article-when-managing-time-efficientlyn-88647.html#post877951
Stay ahead in the corporate world with these tips!
посетить сайт vodkabet новый сайт
посмотреть в этом разделе vodkabet
O segredo do Sugar Rush é não ter ganância. Puxei R$ 1.000 e parei. O mercado premia a consistência.
капельница от похмелья капельница от похмелья
содержание зеркало vodka bet
Meu saldo tava baixo, mas o Hood vs Wolf me salvou ontem à noite.
We can see that we need to develop policies to deal with this trend.
Forra matinal no Fortune Ox. R$ 200 garantidos pro churrasco do fim de semana.
Tava quase zerando a banca, aí o Candy Bonanza me solta um Max Win. Subiu pra R$ 5.000!
Pretty impressive article. I just stumbled upon your site and wanted to say that I have really enjoyed reading your opinions. Any way I’ll be coming back and I hope you post again soon.
капельница при алкогольной интоксикации цена капельница при алкогольной интоксикации цена
Plataforma pagando liso. Saquei R$ 500 do Sugar Rush em 2 minutos via PIX.
Saquei, boa noite.
I think that may be an interesting element, it made me assume a bit. Thanks for sparking my considering cap. On occasion I get so much in a rut that I simply really feel like a record.
Tive uma intuição com o Heist Stakes hoje de manhã e batata: o valor da meta de lucro.
The start of a fast-growing trend?
нарколог на дом круглосуточно москва нарколог на дом круглосуточно москва
Thank you for this great piece of content. Best Regards
I’d like to be able to write like this, but taking the time and developing articles is hard…. Takes a lot of effort.
Tigre não decepciona.
прокапаться прокапаться
1 bhk apartment for rent dubai Buy Penthouse in Dubai
Узнать больше vodka bet casino
узнать больше Здесь vodka bet
выберите ресурсы зеркало vodka bet
Tried it but aviator game seems ok so far, im still figuring out teh mechanics and if im being honest its gonna take me a bit longer before i make up my mind about it, seems decent enough but gonna give it more time before i say anything definate
нажмите здесь водка бэт
взгляните на сайте здесь водка бэт
подробнее здесь зеркало водка бет
на этом сайте vodkabet новый сайт
выберите ресурсы vodkabet новый сайт
продолжить vodkabet прямо сейчас
проверить сайт vodkabet новый сайт
O segredo é esperar. Demorou, mas veio o Super Mega Win no Wild Bandito. R$ 15.000 limpo.
Isso sim é forra de verdade! Tela Forrada no Buffalo Win rendeu 10k no PIX.
Meu saldo tava baixo, mas o Caishen Wins me salvou no horário de pico. Aí sim.
Nice piece of info! May I reference part of this on my blog if I post a backlink to this webpage? Thx.
Подробнее vodkabet онлайн казино
интернет vodka bet
прокапаться на дому нижний новгород прокапаться на дому нижний новгород
Great post. I was checking constantly this blog and I’m impressed! Very useful info specifically the last part 🙂 I care for such info much. I was looking for this certain information for a very long time. Thank you and good luck.
This is an awesome entry. Thank you very much for the supreme post provided! I was looking for this entry for a long time, but I wasn’t able to find a honest source.
вызов нарколога на дом круглосуточно вызов нарколога на дом круглосуточно
I dont think Ive caught all the angles of this subject the way youve pointed them out. Youre a true star, a rock star man. Youve got so much to say and know so much about the subject that I think you should just teach a class about it
ссылка на сайт зеркало водка бет
Um giro de sorte no Bikini Paradise e pum! R$ 100. O mercado premia a consistência.
I think other website proprietors should take this web site as an model, very clean and great user pleasant style and design .
Продолжение вотка бет
Good points – – it will make a difference with my parents.
Перейти на сайт водка бет
Nice post.Very useful info specifically the last part 🙂 Thank you and good luck.
капельница после запоя нижний новгород капельница после запоя нижний новгород
Подробнее водкабет
выберите ресурсы водка бэт
нажмите здесь зеркало водка бет
посмотреть в этом разделе вотка бет
на этом сайте вотка бет
Следующая страница травмат пистолет Санкт-Петербург
нажмите здесь оружие ограниченного поражения
взгляните на сайте здесь водка бэт
узнать больше травмат пистолет Санкт-Петербург
каталог травматическое оружие ЕКБ
здесь vodka bet casino
кликните сюда травмат пистолет Санкт-Петербург
узнать больше Здесь травмат пистолет Санкт-Петербург
веб-сайте vodkabet новый сайт
ссылка на сайт легальное оружие для самообороны
Источник травматическое оружие СПБ
найти это травмат онлайн магазин
посмотреть в этом разделе травмат пистолет Москва цена
узнать больше Здесь vodkabet новый сайт
перенаправляется сюда магазин травматического оружия Москва
посмотреть в этом разделе травматическое оружие Москва
Следующая страница оружие самообороны Махачкала
проверить сайт травматическое оружие Махачкала
нажмите здесь зеркало водка бет
пояснения магазин травмат ЕКБ
Узнать больше легальное оружие для самообороны
нажмите травматический пистолет цена
Перейти на сайт магазин травмат ЕКБ
Узнать больше vodkabet прямой сейчас
Перейти на сайт купить травмат без опыта
нажмите, чтобы подробнее травматическое оружие Махачкала
нажмите, чтобы подробнее купить травмат Екатеринбург
узнать больше травмат пистолет Махачкала
подробнее травматическое оружие купить
ссылка на сайт травмат пистолет Екатеринбург
посетить веб-сайт магазин травмат ЕКБ
подробнее оружие самообороны Москва купить
интернет купить травмат без опыта
нажмите оружие самообороны Москва купить
сайт vodkabet
опубликовано здесь лучший травматический пистолет 2026
Следующая страница травмат для самообороны
интернет оружие для самообороны СПБ
подробнее vodkabet
Главная оружие ограниченного поражения
каталог купить травмат без опыта
over at this website https://tokvideodownloader.click/ur/
see this https://tokvideodownloader.click/ru/
address https://tokvideodownloader.click/am/
navigate to this web-site https://tokvideodownloader.click/hi/
click now https://tokvideodownloader.click/ja/
click this https://tokvideodownloader.click/ur/
find more https://tokvideodownloader.click/how-to-download-stories.html
Visit Website https://tokvideodownloader.click/zh/
view publisher site https://tokvideodownloader.click/id/
в этом разделе травматическое оружие ЕКБ
hop over to here https://tokvideodownloader.click/id/
pop over here https://tokvideodownloader.click/fa/
go now https://tokvideodownloader.click/fil/
blog link https://tokvideodownloader.click/bn/
узнать больше Здесь лицензия на травматическое оружие
Узнать больше купить травмат без опыта
try this out https://tokvideodownloader.click/pt/
ссылка на сайт купить травмат без опыта
Перейти на сайт магазин травмат СПБ
нажмите травмат пистолет Санкт-Петербург
see this page https://tokvideodownloader.click/tiktok-download-mp3.html
visit this site right here https://tokvideodownloader.click/ur/
special info https://tokvideodownloader.click/hi/
wikipedia reference https://tokvideodownloader.click/bn/
you can try here https://tokvideodownloader.click/ru/
find out this here https://tokvideodownloader.click/
official statement https://tokvideodownloader.click/fr/
go to this site https://tokvideodownloader.click/zh/
click site https://tokvideodownloader.click/ar/
read this article https://tokvideodownloader.click/fil/
you could try here https://tokvideodownloader.click/ru/
Continue Reading https://tokvideodownloader.click/ur/
blog https://tokvideodownloader.click/ja/
Stands out for actually being useful instead of just being long, and a look at connectideasandpeople kept that going, length without value is the default mode of most blogs these days but this site has clearly chosen a different path which I respect a lot as a reader who values careful editing decisions like that.
his explanation https://tokvideodownloader.click/pt/
have a peek at this website https://tokvideodownloader.click/fr/
site link https://tokvideodownloader.click/ru/
review https://tokvideodownloader.click/ar/
article https://tokvideodownloader.click/ur/
перейдите на этот сайт травмат пистолет Махачкала
click here for more info https://tokvideodownloader.click/am/
try this out https://tokvideodownloader.click/
article source https://tokvideodownloader.click/es/
more info here https://tokvideodownloader.click/ja/
look at this website https://tokvideodownloader.click/fil/
зайти на сайт vodkabet прямой сейчас
more https://tokvideodownloader.click/how-to-download-stories.html
перенаправляется сюда травмат для новичка
browse this site https://tokvideodownloader.click/
Главная купить травмат без опыта
additional resources https://tokvideodownloader.click/pt/
веб-сайте лучший травматический пистолет 2026
Continue Reading https://tokvideodownloader.click/tr/
click this site https://tokvideodownloader.click/fa/
интернет оружие самообороны Махачкала
navigate to this website https://tokvideodownloader.click/ja/
learn this here now https://tokvideodownloader.click/vi/
look what i found https://tokvideodownloader.click/ja/
веб-сайте зеркало водка бет
find out this here https://tokvideodownloader.click/hi/
read the article https://tokvideodownloader.click/how-to-download-stories.html
ссылка на сайт как получить лицензию на травмат
такой травматическое оружие Москва
check out here https://tokvideodownloader.click/am/
her response https://tokvideodownloader.click/id/
check my blog https://tokvideodownloader.click/ru/
читать купить травмат Махачкала
Related Site https://tokvideodownloader.click/hi/
Extra resources https://tokvideodownloader.click/tr/
пояснения vodkabet
узнать оружие для самообороны СПБ
look at this site https://tokvideodownloader.click/am/
Learn More https://tokvideodownloader.click/how-to-download-stories.html
hop over to here https://tokvideodownloader.click/am/
linked here https://tokvideodownloader.click/es/
узнать купить травмат СПБ
узнать больше травматическое оружие ЕКБ
Não existe milagre, mas o Wild Bandito facilitou muito ontem à noite.
this https://tokvideodownloader.click/zh/
Смотреть здесь магазин травмат СПБ
найти это травмат пистолет Москва цена
такой как получить лицензию на травмат
ссылка на сайт разрешённое оружие для граждан
Следующая страница легальное оружие для самообороны
посетить веб-сайт купить травмат без лицезии
take a look at the site here https://tokvideodownloader.click/
look at this web-site https://tokvideodownloader.click/ar/
Clicking Here https://tokvideodownloader.click/am/
click https://tokvideodownloader.click/ru/
узнать больше vodkabet
you could try these out https://tokvideodownloader.click/tiktok-download-mp3.html
O Rabbit tá pagando muito depois do almoço! Já fiz o PIX de duzentão.
Resources https://tokvideodownloader.click/bn/
Eu só queria bater a meta, mas o Wild Bandito mandou um Max Win e me deu um carro zero.
Jogar Fortune Ox com a cabeça fria é a chave. Puxei o triplo do depósito e tô fora.
посмотреть на этом сайте купить травмат Екатеринбург
Sempre via os vídeos de Super Mega Win, hoje foi minha vez no Fortune Tiger! R$ 8.000 garantidos. Tô tremendo até agora!
Respeitei meu limite, fui no Dragon Hatch e saí no green. O mercado premia a consistência.
Isso sim é forra de verdade! Chuva de moeda no Mahjong Ways 2 rendeu lucro de 5 meses no PIX.
здесь vodkabet новый сайт
подробнее здесь трипскан
Подробнее здесь tripskan
перейдите на этот сайт https://tripscans74.group
посетить веб-сайт https://tripscans74.group
перейти на сайт https://tripscans74.us
Смотреть здесь vodkabet прямой сейчас
на этом сайте сайт трипскан
Mais uma win pro histórico. Heist Stakes tá dominando. Coisa linda.
ссылка на сайт vodka bet casino
выберите ресурсы водкабет
Quem joga Gates of Olympus com inteligência não passa aperto. Lucro bom é lucro no bolso.
на этом сайте https://tripscans74.co/
Tive uma intuição com o Mines agora à tarde e batata: R$ 2.000 de lucro.
BATA4D
Подробнее здесь tripscan сайт
такой https://tripscans74.group
Подробнее здесь https://tripscans74.group
веб-сайт https://tripscans74.co
содержание трипскан
найти это трипскан официальный
зайти на сайт трипскан
читать сайт трипскан
Перейти на сайт https://tripscans74.co
посетить веб-сайт трип скан официальный сайт
этот сайт трипскан
Актуальные вопросы баланса и патчей
девушки с секс игрушками
проверить сайт трипскан
сайт https://tripscans74.us
здесь https://tripscans74.group
перейдите на этот сайт https://tripscans74.co
здесь сайт трипскан
каталог трипскан вход
Подробнее https://tripscans74.co
Главная https://tripscans74.co
такой tripscan официальный
опубликовано здесь https://tripscans74.group/
в этом разделе tripscan
нажмите tripscan
этот контент https://tripscans74.co/
читать https://tripscans74.co
Hoje o Ninja vs Samurai tava uma mãe. Forrei sem passar calor. Paciência paga.
Следующая страница https://tripscans74.group
продолжить https://tripscans74.co/
другие tripskan
нажмите https://tripscans74.group/
посетить веб-сайт https://tripscans74.co
на этом сайте vodkabet
узнать больше https://tripscans74.group
узнать трип скан вход
Продолжение сайт трипскан
ссылка на сайт водкабет
перейдите на этот сайт tripscan официальный сайт
Узнать больше tripscan сайт
узнать больше Здесь https://tripscans74.co/
найти это https://tripscans74.group
сюда tripscan сайт
сюда https://tripscans74.co/
другие https://tripscans74.co
другие трипскан официальный
найти это tripscan официальный
зайти на сайт tripscan сайт
читать трипскан ссылка
здесь https://tripscans74.us
посетить сайт сайт трип скан
ссылка на сайт трип скан официальный
посетить веб-сайт трип скан вход
на этом сайте трипскан ссылка
Главная tripscan сайт
It’s time for communities to rally.
здесь tripskan
проверить сайт https://tripscans74.co/
содержание трип скан вход
I had fun reading this post. I want to see more on this subject.. Gives Thanks for writing this nice article.. Anyway, I’m going to subscribe to your rss and I wish you write great articles again soon.
можно проверить ЗДЕСЬ https://tripscans74.co/
проверить сайт https://tripscans74.group/
A neighbor of mine encouraged me to take a look at your blog site couple weeks ago, given that we both love similar stuff and I will need to say I am quite impressed.
узнать tripscan
сюда vodka bet casino
здесь vodka bet casino
This is valuable stuff.In my opinion, if all website owners and bloggers developed their content they way you have, the internet will be a lot more useful than ever before.
ссылка на сайт tripscan официальный
можно проверить ЗДЕСЬ трип скан официальный сайт
посетить веб-сайт трипскан
посмотреть в этом разделе https://tripscans74.group/
узнать больше https://tripscans74.co/
посмотреть в этом разделе https://tripscans74.co
посмотреть в этом разделе vodkabet
в этом разделе https://tripscans74.co/
содержание https://tripscans74.group/
выберите ресурсы https://tripscans74.co/
Подробнее https://tripscans74.co/
перейти на сайт vodkabet новый сайт
Смотреть здесь https://tripscans74.group
Смотреть здесь сайт трипскан
пояснения https://tripscans74.group
узнать больше https://tripscans74.group/
узнать больше Здесь https://tripscans74.group/
посмотреть в этом разделе трипскан вход
подробнее tripscan зеркало
на этом сайте трипскан вход
Продолжение https://tripscans74.group/
узнать больше tripscan сайт
Aw, this was a very nice post. In idea I wish to put in writing like this moreover taking time and precise effort to make an excellent article! I procrastinate alot and by no means seem to get something done.
Подробнее https://tripscans74.group/
можно проверить ЗДЕСЬ https://tripscans74.group
здесь трип скан
опубликовано здесь tripscan официальный сайт
подробнее https://tripscans74.group
Incrível como o Caishen Wins respeita quem tem paciência. Hoje forrei nele.
посетить веб-сайт https://tripscans74.group/
сайт tripscan
страница трип скан вход
Источник сайт трип скан
Продолжение сайт трип скан
сайт tripscan
Смотреть здесь трипскан ссылка
смотреть здесь трип скан вход
Подробнее трипскан официальный сайт
такой tripscan
сюда tripscan официальный
узнать сайт трип скан
нажмите здесь трипскан официальный сайт
здесь трип скан вход
содержание трипскан официальный сайт
проверить сайт tripscan вход
Перейти на сайт трипскан официальный сайт
посетить веб-сайт трипскан
найти это трип скан официальный
этот сайт трипскан официальный сайт
страница tripscan вход
страница tripskan
узнать больше Здесь tripscan зеркало
страница сайт трип скан
веб-сайте трип скан вход
выберите ресурсы трип скан официальный
узнать больше трипскан вход
Смотреть здесь tripscan вход
найти это трип скан вход
такой трипскан ссылка
другие трип скан официальный сайт
найти это tripscan сайт
Главная tripscan официальный
веб-сайт трип скан
Смотреть здесь трипскан официальный сайт
продолжить трипскан официальный сайт
здесь трипскан
узнать больше трипскан вход
можно проверить ЗДЕСЬ трипскан
Источник трипскан вход
взгляните на сайте здесь трипскан вход
сайт tripskan
этот сайт трип скан
опубликовано здесь трип скан вход
взгляните на сайте здесь трипскан сайт вход
посетить веб-сайт tripscan
подробнее здесь tripskan
Перейти на сайт трип скан
Главная сайт трипскан
содержание трипскан
выберите ресурсы tripscan сайт
посмотреть в этом разделе tripscan официальный сайт
такой сайт трип скан
ссылка на сайт трипскан вход
нажмите, чтобы подробнее трип скан официальный сайт
подробнее здесь сайт трип скан
сюда tripscan сайт
пояснения трип скан официальный
This blog post is excellent, probably because of how well the subject was developed. I like some of the comments too.
перейти на сайт трипскан вход
зайти на сайт tripscan сайт
Узнать больше трипскан вход
Следующая страница tripscan зеркало
такой трипскан официальный
каталог трип скан официальный
Подробнее tripscan официальный
Acabou de bater! o dobro da banca no Bikini Paradise. Gestão é tudo.
посетить сайт трипскан
на этом сайте tripscan вход
найти это tripscan официальный сайт
в этом разделе tripscan вход
на этом сайте трипскан
веб-сайт трип скан вход
сюда tripscan официальный
здесь трип скан вход
интернет сайт трип скан
нажмите здесь tripskan
Перейти на сайт трипскан официальный
Подробнее трипскан сайт вход
перейти на сайт tripscan зеркало
подробнее tripscan официальный
Подробнее здесь трипскан сайт вход
кликните сюда tripscan сайт
взгляните на сайте здесь трипскан официальный сайт
посмотреть в этом разделе tripskan
опубликовано здесь tripscan официальный сайт
зайти на сайт трипскан официальный сайт
можно проверить ЗДЕСЬ трип скан официальный
здесь tripscan вход
продолжить трип скан
перенаправляется сюда трип скан официальный
ссылка на сайт tripscan официальный сайт
посмотреть на этом сайте трип скан
можно проверить ЗДЕСЬ tripscan
посмотреть в этом разделе трипскан официальный сайт
содержание трип скан официальный
здесь tripscan официальный
узнать больше Здесь tripscan зеркало
перейдите на этот сайт трип скан официальный сайт
этот сайт трип скан официальный сайт
Смотреть здесь трип скан официальный сайт
нажмите, чтобы подробнее tripscan зеркало
пояснения трипскан официальный сайт
посетить веб-сайт трип скан
выберите ресурсы tripskan
в этом разделе трипскан сайт вход
нажмите здесь трипскан официальный сайт
подробнее трип скан официальный сайт
посмотреть на этом сайте трипскан официальный
веб-сайте tripskan
подробнее сайт трипскан
Главная сайт трипскан
Подробнее трип скан
посетить веб-сайт tripscan официальный сайт
зайти на сайт трипскан вход
проверить сайт трипскан вход
Sem ganância hoje.
этот контент tripscan вход
PIX de hoje garantido.
веб-сайте трипскан ссылка
Узнать больше tripscan вход
Peguei uma sequência linda no Buffalo Win nesse exato momento. Show.
нажмите здесь трипскан официальный сайт
посмотреть на этом сайте трип скан вход
узнать больше Здесь трип скан
узнать больше tripscan
Hoje o Candy Bonanza tava uma mãe. Forrei sem passar calor. Joga com a razão, não com a emoção.
Nunca duvidei do Rabbit. Hoje ele soltou R$ 50 na maior tranquilidade. Lucro bom é lucro no bolso.
нажмите tripskan
Источник трип скан вход
другие трипскан вход
пояснения tripscan зеркало
Подробнее tripscan сайт
Eu só queria bater a meta, mas o Sweet Bonanza mandou um Forra Máxima e me deu 30k no PIX.
Mais uma win pro histórico. Ganesha Gold tá dominando.
Mahjong tá on fire no fim de semana. Saque de R$ 400 já na conta.
подробнее трип скан официальный сайт
нажмите https://tripscans74.co
этот контент https://tripscans74.co
опубликовано здесь https://tripscans74.co/
проверить сайт трипскан
найти это https://tripscans74.co
узнать больше tripscan
Главная tripscan вход
читать https://tripscans74.co/
Смотреть здесь трипскан вход
Продолжение трип скан официальный сайт
подробнее трипскан официальный
другие https://tripscans74.co/
кликните сюда tripscan вход
кликните сюда трип скан
ссылка на сайт https://tripscans74.co/
нажмите здесь трипскан вход
этот сайт трипскан официальный
ссылка на сайт vodkabet
веб-сайте трипскан официальный
Источник водкабет
Urban mobility is no longer just a logistical challenge; it has become a major frontier for global investment, driven by the need for more efficient and sustainable city environments.
Why is urban mobility becoming such a high priority for modern investors? Advanced AI and automation are streamlining delivery routes and reducing costs, ensuring that the travel experience is smoother and more reliable than ever before.
Here is a list of valuable resources and forum threads on mobility and tech investments::
Official page http://www.klub.kobiety.net.pl/ogolny/t-how-do-new-technologies-improve-travel-and-logistics-experiencesn-88658.html#post877984
Good luck with your investments and travels!
подробнее vodkabet
пояснения vodkabet
перейдите на этот сайт водка бет
ссылка на сайт vodkabet
Читать далее vodkabet
Главная vodkabet
узнать vodka bet
Подробнее водкабет
Quem acreditou no Piggy Gold ontem à noite se deu bem. Eu garanti o valor da meta!
подробнее водкабет
Top! O Gates of Olympus não para de soltar carta boa. Respeita o stop-win.
здесь vodkabet прямо сейчас
содержание vodkabet
Top! O Caishen Wins não para de soltar carta boa. Sem ganância o resultado vem.
перейдите на этот сайт казино водка бет vodkabet
сайт водкабет
веб-сайт vodkabet
найти это водка бет
Подробнее здесь водкабет
Следующая страница vodkabet прямо сейчас
подробнее водка бет
узнать больше Здесь казино водка бет vodkabet
интернет vodkabet
в этом разделе vodkabet
этот контент vodka bet
в этом разделе vodka bet
посетить сайт vodkabet прямо сейчас
Следующая страница vodkabet прямо сейчас
содержание vodka bet
Подробнее tripscan зеркало
на этом сайте vodka bet
перейти на сайт vodka bet
Главная vodka bet
перейдите на этот сайт водка бет
нажмите vodka bet
зайти на сайт казино водка бет vodkabet
подробнее казино водка бет vodkabet
здесь водка бет
перенаправляется сюда vodkabet
нажмите, чтобы подробнее vodkabet новый сайт
ссылка на сайт казино водка бет vodkabet
каталог vodkabet прямо сейчас
в этом разделе vodkabet прямо сейчас
Источник tripscan официальный
опубликовано здесь водкабет
single each way bet calculator http://singlebet-calculator.com/ .
смотреть здесь водка бет
сюда водкабет
Girei um pouco no Bikini Paradise ontem à noite e já tô com milzão no lucro. Sensacional!
Caiu o PIX.
взгляните на сайте здесь vodkabet прямо сейчас
подробнее здесь vodkabet
зайти на сайт водкабет
подробнее казино водка бет vodkabet
узнать больше vodka bet
здесь vodka bet
смотреть здесь водка бет
Перейти на сайт казино водка бет vodkabet
продолжить водкабет
зайти на сайт vodkabet
посетить веб-сайт водкабет
нажмите, чтобы подробнее сайт трип скан
Продолжение vodkabet
узнать больше vodkabet
этот контент https://tripscans74.group
в этом разделе vodkabet прямо сейчас
подробнее здесь vodkabet
нажмите здесь казино водка бет vodkabet
веб-сайте vodka bet
проверить сайт vodkabet прямо сейчас
перенаправляется сюда https://progunsupply.com
Перейти на сайт https://ap.progunsupply.com/
узнать больше https://progunsupply.com/
узнать https://ap.progunsupply.com
читать https://progunsupply.com/
зайти на сайт https://progunsupply.com/
Смотреть здесь https://progunsupply.com
каталог https://progunsupply.com
интернет https://progunsupply.com/
Смотреть здесь https://ap.progunsupply.com/
взгляните на сайте здесь https://progunsupply.com
Продолжение https://tripscans74.group/
Nice read, I just passed this onto a colleague who was doing some research on that. And he just bought me lunch as I found it for him smile Therefore let me rephrase that: Thank you for lunch!
смотреть здесь https://ap.progunsupply.com
ссылка на сайт https://progunsupply.com
сайт https://ap.progunsupply.com
взгляните на сайте здесь https://ap.progunsupply.com
Смотреть здесь https://tripscans74.group/
Продолжение https://ap.progunsupply.com
другие https://progunsupply.com
ссылка на сайт https://ap.progunsupply.com
такой https://ap.progunsupply.com/
сюда https://progunsupply.com
Clear, concise and easy to access.
узнать больше Здесь tripskan
Узнать больше https://ap.progunsupply.com/
подробнее https://progunsupply.com
ссылка на сайт трип скан
читать https://tripscans74.group
здесь https://ap.progunsupply.com/
Подробнее здесь https://progunsupply.com/
нажмите здесь https://ap.progunsupply.com/
такой https://progunsupply.com
проверить сайт https://ap.progunsupply.com
Подробнее здесь https://ap.progunsupply.com
Главная https://ap.progunsupply.com
каталог трип скан официальный сайт
Перейти на сайт https://progunsupply.com/
найти это https://progunsupply.com/
веб-сайт https://ap.progunsupply.com
Источник https://progunsupply.com/
пояснения https://progunsupply.com/
посетить сайт tripscan
Следующая страница https://ap.progunsupply.com
ссылка на сайт трипскан
подробнее https://ap.progunsupply.com/
I just added your web site to my blogroll, I hope you would look at doing the same.
кликните сюда https://progunsupply.com
ссылка на сайт tripskan
ссылка на сайт https://progunsupply.com/
перейдите на этот сайт https://progunsupply.com
зайти на сайт https://progunsupply.com
кликните сюда https://ap.progunsupply.com
посетить веб-сайт https://progunsupply.com/
зайти на сайт https://ap.progunsupply.com
нажмите, чтобы подробнее https://progunsupply.com/
Узнать больше https://progunsupply.com
узнать больше Здесь https://progunsupply.com/
Thank you for your sharing. I am worried that I lack creative ideas. It is your article that makes me full of hope. Thank you. But, I have a question, can you help me?
такой https://ap.progunsupply.com
взгляните на сайте здесь https://tripscans74.group/
Смотреть здесь https://progunsupply.com/
пояснения https://ap.progunsupply.com/
Подробнее здесь https://ap.progunsupply.com/
страница https://progunsupply.com/
посмотреть на этом сайте https://progunsupply.com/
пояснения водкабет казино
этот сайт водка бет
перейдите на этот сайт vodkabet
Продолжение водка бэт
нажмите здесь vodkabet
Nunca duvidei do Rabbit. Hoje ele soltou o valor da meta na maior tranquilidade. Quem saca rápido, comemora rápido.
Tive uma intuição com o Spaceman de madrugada e batata: R$ 1.000 de lucro.
Se tá buscando Jackpot, vai de Fortune Mouse. Peguei 30k no PIX no fim de semana.
Sempre via os vídeos de Max Win, hoje foi minha vez no Fortune Ox! mais de 10k garantidos. Pulei da cadeira!
читать водкабет казино
страница водка бэт
Não é lenda, o Jackpot do Ratinho bateu pra mim agora à tarde. Forra de lucro de 5 meses.
здесь vodka bet casino
посмотреть на этом сайте водка бет
Hoje foi lucro puro.
Se você não testou o Fortune Ox no horário de pico, perdeu a chance. Eu peguei o dobro da banca!
узнать больше водкабет казино
online casino monopoly live online casino monopoly live .
каталог vodka bet casino
Смотреть здесь vodkabet
informative post wdcfree
see post wise force deleter free download in
try these out download wise disk cleaner
why not try these out Wise Care 365 Free
this article Download memory optimizer
visit Download wise data recovery for free in
my site Wise Folder Hider Download Free in
her explanation wise ccleaner
click to read Wise Registry CCleaner download
official website wise game booster official website
view it now Wise Registry Cleaner Download
you could look here wrcfree
moved here wise care 365 how to use
advice what is DirectX texture generator cache
Learn More download wise care 365 from the official website in
why not try this out What is this folder called dxcache
news what is DirectX texture generator cache
right here Download wise data recovery for free in
go right here download wise cleaner
Are grateful for this blog post, it’s tough to find good information and facts on the internet
pop over to this site Dx Cache
More https://vc.ru/id3219783/2886181-kak-ya-obnovil-svoy-lichnyy-sayt-vizitku
Spot on with this write-up, I truly believe this website requirements a lot much more consideration. I’ll probably be once more to read much much more, thanks for that info.
look at these guys download wise registry cleaner free for Windows 10 in for free
Горячая линия во время тура — позвонил когда возникла проблема с трансфером в аэропорту. Решили за 15 минут, такси организовали за счёт агентства. Поддержка реальная, не формальная. горящие туры в Турцию Москва
their explanation Wise Game Booster
Dude.. I am not much into reading, but somehow I got to read lots of articles on your blog. Its amazing how interesting it is for me to visit you very often. –
I am glad to be a visitor on this website!, regards for this rare information!
visit the website Download Wise Care 365 Free in from the Official Website
it is a really nice point of view. I usually meet people who rather say what they suppose others want to hear. Good and well written! I will come back to your site for sure!
click this link here now Wise Auto Shutdown
browse this site Wise Care 365 free download in
a fantastic read wise care 365
blog How to Delete Empty Files Windows 11 folders
special info Download Wise Care 365
go right here Wise Cleaner official website
look at these guys Wise Disk Cleaner Pro Download
Cherished is likely to be what people say about your comments.
Check This Out wise care 365 free official website
site link What is this folder called dxcache
read this Download Wise Care 365 Free in from the Official Website
Full Article Wise Registry CCleaner download
find out here Download Wise Disk Cleaner
view it now Wise Registry Cleaner Download
click here now Hide Drive in Windows 11
her comment is here Wise Register Cleaner
重生后我让渣男后悔莫及这一次提前布局,打脸特别痛快高清免费点击观看
discover this info here Wise Registry Cleaner
reference Wise Disk Cleaner Free Download
this hyperlink Wise Reg Cleaner
useful link wise shutdown
view website Wise Program Uninstaller Download
Recommended Site Wise Registry Cleaner Download
view it Wise Force Deleter
More https://vc.ru/id3219783/2886181-kak-ya-obnovil-svoy-lichnyy-sayt-vizitku
find more info How to completely remove 360 ​​Total Security from a computer on Windows 11
app per giocare a crazy time https://crazytimeitalia-it.com/
see it here Wise Care
find out here now wise care 365 how to use
why not find out more Wise Data Recovery Download
Our site Download wise care 365 for free in from the official website
our website Download memory optimizer
this post Wise Cleaner
investigate this site Wise Registry
wikipedia reference Dx Cache
Thanks for sharing. I read many of your blog posts, cool, your blog is very good.
Full Report Download Wise Folder hider
click here for more info Download wise care 365 from the official website for Windows 10 64-bit
why not find out more Clear NVIDIA Shader Cache
check out this site ccleaner
try this out Wise Care 365 Free
Web Site Wise 365
here are the findings download wise cleaner
Все условия в договоре зафиксированы — отель, питание, трансфер, страховка. Никаких сюрпризов по приезде. Для нас это важно после истории когда отель оказался другим. тур в Мармарис из Москвы
right here wise care 365
click resources Download wise force deleter
read review wise folder
click now Disc Cleaner
visit this page Download memory optimizer
pop over to this site wize disk cleaner
find more Wise Reg Cleaner
look at here Wise Care 365 Free Download
Источник водка бэт
Главная водкабет казино
другие водка бэт
Узнать больше вотка бет
When are you going to take this to a full book?
перенаправляется сюда зеркало водка бет
нажмите водка бэт
смотреть здесь vodkabet прямо сейчас
нажмите, чтобы подробнее vodkabet прямо сейчас
I do believe your audience could very well want a good deal more stories like this carry on the excellent hard work.
Перейти на сайт vodkabet прямо сейчас
перейти на сайт водка бет
взгляните на сайте здесь вотка бет
crazy time spin crazy time spin .
посмотреть на этом сайте вотка бет
Смотреть здесь vodka bet
Перейти на сайт vodka bet
monopoly live evolution monopoly live evolution.
такой вотка бет
Abnormal this put up is totaly unrelated to what I was searching google for, but it surely used to be listed at the first page. I suppose your doing one thing proper if Google likes you adequate to place you at the first page of a non similar search.
Your idea is outstanding; the issue is something that not enough persons are speaking intelligently about. I’m very happy that I stumbled throughout this in my seek for one thing regarding this.
Good job for bringing something important to the internet!
I truly appreciate this post. I have been looking everywhere for this! Thank goodness I found it on Bing. You have made my day! Thank you again
OK, you outline what is a big issue. But, can’t we develop more answers in the private sector?
продолжить vodka bet
страница зеркало водка бет
最强反套路系统各种骚操作层出不穷,看着特别解压高清免费点击观看
like this leap wallet twitter
click to read leap wallet official
find here leap wallet
go to my blog leap wallet twitter profile
More https://vc.ru/id3219783/2886181-kak-ya-obnovil-svoy-lichnyy-sayt-vizitku
Excellent read, I just passed this onto a colleague who was doing a little research on that. And he actually bought me lunch because I found it for him smile So let me rephrase that.|
Easily, the post is really the greatest on this laudable topic. I concur with your conclusions and will thirstily look forward to your future updates. Saying thank will not just be sufficient, for the wonderful c lucidity in your writing. I will instantly grab your rss feed to stay privy of any updates. Solid work and much success in your business enterprise!
this page leap wallet twitter
More https://vc.ru/id3219783/2886181-kak-ya-obnovil-svoy-lichnyy-sayt-vizitku
Hello there, just became aware of your blog through Google, and found that it is truly informative. I am going to watch out for brussels. I will appreciate if you continue this in future. Lots of people will be benefited from your writing. Cheers!
Get the facts x.com leap wallet
helpful hints leap wallet
click here to read leap cosmos wallet
online poker with bitcoin online poker with bitcoin .
888starz apk https://888starzuz4.com/apk/
888straz https://888starzuz3.com/
If saying what you want to a stylist has always felt difficult, this service turns that gap into a structured, visual outcome. With one photo and a brief quiz, the system studies your features, hair characteristics, and daily context, then delivers 10 matched cuts together with a detailed barber guide. Behind the result is not a simple filter, but a mathematical model with 50+ parameters and 3D head mapping, designed to show how the shape sits on your head. Instead of relying on a quick visual guess, the platform combines 50+ analysis points with 3D head mapping to show the real fit of each option. The output is built for realism: high-fidelity previews that make the options easy to judge. In addition, you get a clear haircut plan with practical parameters and stylist instructions, which helps turn the visual concept into an actual salon result. The workflow stays lightweight: upload one selfie, wait roughly 30 seconds, and review the outcome without creating an account first. For people who have long worn a cut that does not really suit them, or for anyone who prefers a practical, data-backed style decision, this approach offers both clarity and confidence. https://www.xen-factory.com/index.php?members/hairpicknet.163244/#about
If you are used to guessing what might suit you, this resource replaces guesswork with a more informed preview. With one photo and a brief quiz, the system studies your features, hair characteristics, and daily context, then delivers 10 matched cuts together with a detailed barber guide. Behind the result is not a simple filter, but a mathematical model with more than 50 parameters and 3D head mapping, designed to show how the shape sits on your head. Instead of relying on a quick visual guess, the platform combines 50+ analysis points with anatomical scanning to show the real fit of each option. The output is built for realism: 4K photoreal visuals that make the options easy to judge. Additionally, the package includes a barber-friendly instruction set, so the recommendation is not only attractive on screen but also usable in the chair. The process is intentionally simple: one selfie, fast analysis in about 30 seconds, and no registration required before you see the result. For people who have long worn a cut that does not really suit them, or for anyone who prefers a practical, data-backed style decision, this approach offers both clarity and confidence. http://www.rohitab.com/discuss/user/3598104-hairpicknet/
здесь трип скан официальный сайт
посетить веб-сайт tripscan зеркало
такой tripscan
выберите ресурсы трипскан официальный
перейдите на этот сайт трипскан официальный
зайти на сайт трипскан вход
Следующая страница сайт трипскан
风吹半夏女性创业故事格外精彩,角色魅力十分突出高清免费点击观看
Узнать больше tripscan зеркало
содержание трипскан ссылка
Источник сайт трип скан
каталог трипскан ссылка
узнать больше tripscan
страница сайт трип скан
страница трипскан
можно проверить ЗДЕСЬ трипскан официальный сайт
Узнать больше трип скан вход
продолжить трип скан официальный сайт
Смотреть здесь трипскан сайт вход
зайти на сайт трипскан официальный сайт
читать трипскан вход
Подробнее tripscan официальный сайт
здесь трипскан сайт вход
посмотреть в этом разделе трип скан
в этом разделе сайт трипскан
узнать tripscan
узнать больше трипскан сайт вход
в этом разделе tripscan сайт
другие tripscan сайт
Подробнее сайт трипскан
Главная трипскан ссылка
нажмите, чтобы подробнее трип скан
содержание tripscan официальный сайт
узнать больше Здесь tripscan сайт
нажмите здесь трипскан
Подробнее сайт трип скан
перенаправляется сюда tripscan зеркало
Перейти на сайт tripscan официальный сайт
подробнее трип скан официальный
можно проверить ЗДЕСЬ tripskan
узнать tripscan официальный
проверить сайт сайт трип скан
подробнее tripscan вход
нажмите здесь сайт трип скан
нажмите здесь трипскан официальный сайт
Читать далее трип скан официальный сайт
подробнее трипскан ссылка
посмотреть в этом разделе трипскан официальный
подробнее сайт трип скан
этот сайт трип скан вход
веб-сайт tripscan официальный сайт
зайти на сайт tripscan официальный
узнать трип скан
найти это tripscan сайт
узнать больше Здесь трипскан официальный сайт
выберите ресурсы tripskan
перейти на сайт сайт трип скан
опубликовано здесь трип скан вход
страница сайт трипскан
I found your blog through google and I must say, this is probably one of the best well prepared articles I have come across in a long time. I have bookmarked your site for more posts.
For anyone who knows the feeling of wanting a better haircut but not knowing how to describe it, this platform offers a more precise path. From one selfie plus a few questions, it builds a report that combines facial analysis, hair assessment, and practical context into 10 hairstyle options and clear instructions for a stylist. Behind the result is not a simple filter, but a mathematical model with 50+ parameters and 3D head mapping, designed to show how the shape sits on your head. Instead of relying on a quick visual guess, the platform combines 50+ analysis points with anatomical scanning to show why each style belongs to you. The result is a photorealistic lookbook that feels close to a real photo, not a plastic mockup or a childlike filter. In addition, you get a clear haircut plan with practical parameters and stylist instructions, which helps turn the visual concept into an actual salon result. In just a few steps, you can move from a single photo to 10 matched options and a PDF report, with no sign-up friction. At a time when ordinary apps still feel like simple overlays, this feels more like a digital rendering of a new self than a playful toy. https://www.weddingbee.com/members/hairpicknet/
каталог tripscan
Fantastic piece of writing here1
Главная https://slon4-at.com/
смотреть здесь https://slon4-at.com/
здесь https://slon4-at.com
смотреть здесь https://slon4-at.com
в этом разделе https://slon4-at.com/
можно проверить ЗДЕСЬ https://slon4-at.com
опубликовано здесь https://slon4-at.com
содержание casino retro
сайт casino retro registration
For anyone who needs a reliable platform, Aradabet is worth checking out, just make sure you read through the terms carefully and understand what your getting into, lot of people jump in without doing their homework first.
сайт https://slon4-at.com/
другие retro casino
посетить сайт newretrocasino
в этом разделе retro casino бездепозитный бонус
в этом разделе newretrocasino
Источник https://slon4-at.com/
узнать больше https://slon4-at.com
зайти на сайт https://slon4-at.com
нажмите, чтобы подробнее https://slon4-at.com/
Подробнее casino retro registration
читать casino retro registration
содержание retro casino бездепозитный бонус
ссылка на сайт https://slon4-at.com
Перейти на сайт https://slon4-at.com/
страница ретро казино
подробнее ретро казино
Перейти на сайт ретро казино
веб-сайте https://slon4-at.com/
Перейти на сайт https://slon4-at.com
содержание https://slon4-at.com/
узнать больше Здесь casino retro registration
кликните сюда https://slon4-at.com/
веб-сайт casino retro registration
можно проверить ЗДЕСЬ https://slon4-at.com/
выберите ресурсы https://slon4-at.com/
Продолжение https://slon4-at.com
подробнее casino retro
выберите ресурсы casino retro
взгляните на сайте здесь retro casino
Читать далее retro casino
пояснения https://slon4-at.com
Подробнее https://slon4-at.com/
узнать casino retro registration
интернет ретро казино
веб-сайте newretrocasino
интернет https://slon4-at.com/
нажмите здесь casino retro
проверить сайт retro casino бездепозитный бонус
зайти на сайт casino retro
этот контент casino retro
Подробнее retro casino
посетить веб-сайт ретро казино
Перейти на сайт retro casino
подробнее здесь https://slon4-at.com/
здесь retro casino бездепозитный бонус
веб-сайт retro casino
Перейти на сайт casino retro registration
перейти на сайт retro casino бездепозитный бонус
посмотреть в этом разделе https://slon4-at.com
выберите ресурсы casino retro
Смотреть здесь retro casino
перейдите на этот сайт casino retro registration
содержание retro casino
ссылка на сайт ретро казино
If you have ever struggled to explain a haircut you want, this resource turns that uncertainty into a clear, visual result. From one selfie plus a few questions, it builds a report that combines facial analysis, hair assessment, and practical context into 10 hairstyle options and clear instructions for a stylist. Behind the result is not a simple filter, but a mathematical model with 50+ style factors and 3D head mapping, designed to show how a cut fits. Rather than applying a generic hairstyle overlay, it uses an algorithmic model with anatomical scanning to explain which details are emphasized. What you receive is a photorealistic lookbook, designed to avoid the flat look of toy-like filters and instead present a realistic rendering. Each report adds a structured guide for the stylist, making it easier to explain the cut without having to do it “by hand”. The entry point is straightforward, with a short analysis window and a PDF-style report that keeps everything in one place. For those who want more than a pretty filter, it offers a useful bridge between taste, anatomy, and everyday wearability. https://pubhtml5.com/homepage/ifplv/
ссылка на сайт https://slon4-at.com/
на этом сайте ретро казино
каталог casino retro registration
перенаправляется сюда https://slon4-at.com
перенаправляется сюда retro casino бездепозитный бонус
можно проверить ЗДЕСЬ retro casino бездепозитный бонус
Источник casino retro registration
такой casino retro registration
нажмите здесь https://slon4-at.com
каталог https://slon4-at.com/
кликните сюда retro casino бездепозитный бонус
взгляните на сайте здесь casino retro registration
посмотреть в этом разделе newretrocasino
на этом сайте casino retro registration
Читать далее https://slon4-at.com
посетить сайт retro casino бездепозитный бонус
узнать больше Здесь newretrocasino
узнать больше Здесь https://slon4-at.com
перенаправляется сюда https://slon4-at.com/
этот сайт casino retro registration
читать casino retro
Узнать больше retro casino
другие https://slon4-at.com
выберите ресурсы newretrocasino
Следующая страница casino retro registration
узнать retro casino бездепозитный бонус
посмотреть на этом сайте casino retro registration
посмотреть на этом сайте casino retro
продолжить https://slon4-at.com
посмотреть на этом сайте casino retro registration
посетить сайт newretrocasino
этот сайт https://slon4-at.com
Подробнее https://slon4-at.com
страница https://slon4-at.com/
опубликовано здесь https://slon4-at.com/
узнать https://slon4-at.com
здесь https://slon4-at.com/
пояснения https://slon4-at.com/
нажмите https://slon4-at.com/
этот сайт https://slon4-at.com
Источник ретро казино
世足直播線上看
想找世足免費觀看資訊,最重要的是能快速掌握比賽時間、對戰組合與直播管道。世界盃是全球球迷最期待的足球盛事,每一屆都會吸引大量觀眾關注,從小組賽到淘汰賽,每場比賽都有可能出現爆冷、逆轉或關鍵進球,因此不少人都會提前搜尋世足免費相關內容,希望在開賽前就安排好觀賽時間。
對台灣球迷來說,世界盃賽事時間常常受到時差影響,有些比賽可能在深夜或清晨開踢,如果沒有事先查好賽程,很容易錯過精彩對決。透過 RG直播,可以更方便掌握每日熱門賽事、比賽資訊與線上觀看重點,不論是想看傳統強隊、亞洲球隊,還是關注冠軍熱門,都能快速找到需要的內容。
搜尋世足免費時,建議除了確認是否能觀看比賽,也要注意直播穩定度與資訊完整性。熱門賽事通常會有大量球迷同時上線,如果平台載入速度慢或畫面不穩,會大幅影響觀賽體驗。RG直播整理世界盃相關資訊,讓使用者可以更輕鬆追蹤賽事,不用在不同網站之間來回搜尋。
世界盃不只是足球比賽,更是一場全球性的運動狂歡。每一場比賽背後都有球員、國家隊與球迷的期待。想要完整享受世足熱潮,可以透過 RG直播掌握世足免費看球資訊,快速了解賽程、直播與熱門對戰,不錯過任何值得關注的精彩瞬間。
узнать https://slon4-at.com/
узнать больше Здесь ретро казино
нажмите, чтобы подробнее https://slon4-at.com/
проверить сайт https://slon4-at.com
проверить сайт https://slon4-at.com/
читать retro casino бездепозитный бонус
посетить сайт https://slon4-at.com/
опубликовано здесь https://slon4-at.com/
Источник tripskan
нажмите здесь https://slon4-at.com
Главная сайт трип скан
проверить сайт retro casino
посмотреть в этом разделе https://slon4-at.com/
такой https://slon4-at.com/
читать https://slon4-at.com/
сюда ретро казино
急诊科医生紧张忙碌的工作节奏,让剧情始终保持张力高清免费点击观看
узнать больше Здесь трипскан вход
перейти на сайт tripscan официальный
содержание retro casino бездепозитный бонус
我的青春恋爱物语果然有问题人物成长线刻画得十分细腻高清免费点击观看
найти это casino retro
สล็อตเว็บตรง
อนาคตของสล็อตออนไลน์ในปี 2026: เทคโนโลยีใหม่กับอนาคตของ iGaming
ตลาดสล็อตออนไลน์ยังคงขยายตัวอย่างต่อเนื่องในปี 2026 ด้วยการพัฒนาเทคโนโลยีที่ช่วยยกระดับทั้งประสิทธิภาพ ความเสถียร และประสบการณ์ของผู้ใช้งาน
ผู้ใช้งานสามารถเข้าเล่นได้ทุกเวลาผ่านมือถือ แท็บเล็ต และคอมพิวเตอร์ โดยสามารถเชื่อมต่อได้จากทุกที่
สล็อตออนไลน์ยุคใหม่
สล็อตออนไลน์ยุคใหม่ถูกออกแบบให้มีภาพ เสียง และรูปแบบการเล่นที่ทันสมัยยิ่งขึ้น
เกมจำนวนมากมาพร้อมระบบแจ็คพอตสะสมและฟีเจอร์พิเศษต่าง ๆ ช่วยเพิ่มความตื่นเต้นและความสนุกให้กับผู้เล่น
Direct API มีความสำคัญอย่างไร
Direct API ช่วยให้ข้อมูลถูกส่งระหว่างระบบต่าง ๆ ได้โดยตรง ช่วยลดความล่าช้าในการส่งข้อมูลและเพิ่มเสถียรภาพของระบบ
ข้อดีของการเชื่อมต่อแบบ Direct API ได้แก่
เพิ่มความเร็วในการตอบสนอง
รองรับผู้เล่นได้จำนวนมาก
ประมวลผลข้อมูลแบบ Real-Time
ช่วยให้ระบบมีความมั่นคงมากขึ้น
เพิ่มความยืดหยุ่นในการพัฒนา
เทคโนโลยีนี้มักทำงานร่วมกับ Cloud Infrastructure ที่สามารถขยายทรัพยากรได้ตามปริมาณผู้ใช้งาน
ระบบ RNG และความโปร่งใส
Random Number Generator ทำหน้าที่กำหนดผลลัพธ์แต่ละรอบแบบสุ่ม
ผลลัพธ์ในแต่ละรอบไม่มีความเกี่ยวข้องกันและไม่สามารถคาดการณ์ได้
RNG ที่มีคุณภาพจะได้รับการตรวจสอบจากหน่วยงานที่เกี่ยวข้อง เพื่อยืนยันความโปร่งใสและความเป็นธรรมของเกม
Подробнее здесь tripscan официальный
Читать далее retro casino
Узнать больше https://slon4-at.com
взгляните на сайте здесь трипскан официальный
посмотреть в этом разделе https://slon4-at.com
Узнать больше casino retro
в этом разделе https://slon4-at.com
узнать больше Здесь трипскан официальный
Продолжение newretrocasino
Подробнее здесь tripscan официальный сайт
перейти на сайт https://slon8-cc.at/
逆境无赖开司每一次选择都牵动人心,看着特别上头高清免费点击观看
半熟男女人物关系贴近现实,很多情节都能找到生活影子高清免费点击观看
ссылка на сайт https://slon4-at.com/
опубликовано здесь https://slon8-cc.at/
узнать больше tripskan
нажмите здесь https://slon8-cc.at/
Подробнее здесь tripscan
Jump into disquiet! Impose on behave surmount games at our casino – slots, blackjack, roulette & more. Gain a victory in big with generous bonuses and loose spins. Combine second & assert your greeting step!
https://primacasino-de.com/
Boa madrugada. Atualizando: proteger banca. Betway porém tem que ter paciência.
в этом разделе tripscan зеркало
Beleza, será que alguém sabe sobre cassino que paga? é furada? F12
More https://vc.ru/id3219783/2886181-kak-ya-obnovil-svoy-lichnyy-sayt-vizitku
кликните сюда https://slon8-cc.at
Источник tripscan вход
нажмите здесь https://slon8-cc.at
ссылка на сайт tripscan официальный
Перейти на сайт трипскан вход
перейдите на этот сайт трипскан
подробнее трипскан сайт вход
Продолжение tripskan
посетить сайт retro casino бездепозитный бонус
Смотреть здесь retro casino бездепозитный бонус
можно проверить ЗДЕСЬ casino retro
Boa madrugada. Atualizando: bankroll management. Stake com disciplina funciona.
Buenas noches — World Cup 2026 betting markets for Brasil are live. Betway via bizum.
Перейти на сайт https://slon8-cc.at/
Hola, contenido de verdad, sin rodeos. aviator Betway Buena info.
нажмите здесь ретро казино
Boa madrugada, post muito útil sobre bonus de boas vindas. sinais de vício? alguém já testou isso?
сайт https://slon4-at.com
подробнее здесь retro casino бездепозитный бонус
нажмите, чтобы подробнее https://slon8-cc.at/
посмотреть в этом разделе https://slon4-at.com/
Hi there. In my experience with slot machines but patience is key. opay
сайт https://slon8-cc.at
E aí, guia sem enrolação. crash blaze na minha experiência sem enrolação.
E aí — World Cup 2026 betting markets for Super Eagles are live. 22Bet via mtn momo.
Olá. Jogo toda semana com crash blaze mas depende do timing. saque pix
Our community leaders need to read this, and look at developing some of your recommendations.
Yo. Já joguei muito isso na spaceman e com disciplina funciona. criptomoeda
Подробнее здесь трипскан официальный сайт
подробнее здесь tripscan официальный
ссылка на сайт трип скан официальный
Продолжение трип скан официальный
Источник https://tripscans90.cc/
узнать tripscan зеркало
узнать больше https://tripscans90.cc/
веб-сайте сайт трип скан
посмотреть на этом сайте https://tripscans90.cc/
Главная tripscan вход
здесь tripscan официальный
содержание трипскан ссылка
nicee content keep writing
страница трип скан
здесь https://tripscans90.cc/
ссылка на сайт https://tripscans90.cc/
посмотреть в этом разделе трипскан официальный
читать трип скан официальный
нажмите здесь tripscan зеркало
нажмите tripscan официальный сайт
This is really interesting, You’re a very skilled blogger. I have joined your feed and look forward to seeking more of your fantastic post. Also, I have shared your website in my social networks!
страница https://tripscans90.cc/
пояснения трип скан официальный сайт
посетить веб-сайт tripscan вход
такой tripscan официальный
сюда https://tripscans90.cc
читать tripscan официальный сайт
пояснения tripscan вход
Главная трипскан сайт вход
Продолжение tripskan
нажмите здесь https://tripscans90.cc
перейти на сайт трипскан сайт вход
найти это tripscan сайт
перенаправляется сюда https://tripscans90.cc/
кликните сюда трип скан официальный
узнать больше Здесь трип скан официальный сайт
каталог https://tripscans90.cc
подробнее https://tripscans90.cc/
нажмите, чтобы подробнее сайт трипскан
подробнее здесь https://tripscans90.cc
Главная tripscan вход
опубликовано здесь https://tripscans90.cc
проверить сайт трип скан
Продолжение https://tripscans90.cc
нажмите здесь трипскан вход
Узнать больше трипскан сайт вход
веб-сайте трип скан вход
Buenas tardes. casino online es real.
нажмите, чтобы подробнее tripscan зеркало
перейти на сайт https://tripscans90.cc/
сюда https://tripscans90.cc
перейдите на этот сайт трипскан сайт вход
перейти на сайт трип скан официальный
здесь трип скан официальный
содержание https://tripscans90.cc
Boa noite, vídeo muito bom também. valeu cassino em reais comprei strategia Sportingbet paga quando menos espera. forte
посмотреть на этом сайте трипскан вход
подробнее tripscan зеркало
Hi there, finally an honest review. casino with pix — SBOBET but patience is key.
узнать больше tripscan вход
сюда трип скан официальный сайт
кликните сюда трипскан ссылка
you may have an ideal blog here! would you prefer to make some invite posts on my blog?
узнать больше Здесь tripscan официальный сайт
Продолжение трипскан официальный
проверить сайт трипскан сайт вход
страница https://tripscans90.cc
Перейти на сайт трипскан вход
перенаправляется сюда сайт трип скан
смотреть здесь tripscan сайт
E aí. Fiz diversas tentativas na jogos de cassino e e o retorno é razoável. cripto
здесь трипскан официальный сайт
нажмите здесь https://tripscans90.cc/
Перейти на сайт трипскан сайт вход
опубликовано здесь https://tripscans90.cc/
нажмите tripskan
сюда tripscan официальный
на этом сайте трипскан официальный сайт
Перейти на сайт трип скан официальный сайт
другие сайт трипскан
Перейти на сайт трип скан официальный
веб-сайт https://tripscans90.cc/
Olá. Atualizando: jogo do baccarat. e vale o risco.
Halo, panduan lengkap banget. fortune tiger
этот сайт трипскан сайт вход
подробнее https://tripscans90.cc
подробнее здесь https://tripscans90.cc
посетить сайт tripscan сайт
сюда трипскан ссылка
Yo, guia que todo mundo precisa ler. jogo crash ganhei e saquei 22Bet mas depende do timing.
посмотреть на этом сайте сайт трип скан
в этом разделе трип скан
Читать далее https://tripscans90.cc
страница трип скан вход
здесь трипскан официальный сайт
нажмите https://tripscans90.cc
перейти на сайт tripscan сайт
каталог https://tripscans90.cc/
посмотреть в этом разделе https://tripscans90.cc/
Beleza, informação de verdade copa do mundo 2026. slot demo odds estão boas. Abraços.
Fala, pessoal, conteúdo de verdade, sem enrolação sobre cassino slots. aposta conscientealguém sabe?
продолжить https://tripscans90.cc
I just added this to my favorites. I truly love reading your posts. Tyvm!
Узнать больше https://tripscans90.cc
здесь https://tripscans90.cc
Buenas noches, betting on Brasil for World Cup 2026. Odds are decent on Stake. m-pesa deposit took minutes.
Yo, guia prático e sem firula. valeu demais crash game já testei no tigrinho sem enrolação.
Salve. Comprei strategia na cassino seguro e e recomendo.
кликните сюда https://tripscans90.cc
интернет https://tripscans90.cc/
зайти на сайт https://tripscans90.cc/
Buenas, pregunta seria sobre casino con pix?
about his
dma usb firmware
Check Out Your URL dma shop online
hop over to this web-site
dma providers
hoki1881
можно проверить ЗДЕСЬ https://tripscans90.cc
her latest blog
dma trusted sellers
click here to investigate dma hardware showcase
ссылка на сайт https://tripscans90.cc
There is perceptibly a lot to identify about this. I consider you made some good points in features also.
her explanation secure firmware loader
news black ops dma
Подробнее здесь https://tripscans90.cc/
this
dma cheats
взгляните на сайте здесь https://tripscans90.cc
read this post here
xim controller aimbot setup
article source
direct spoofing
my sources hardware setup guide
Следующая страница https://tripscans90.cc/
кликните сюда https://tripscans90.cc/
читать https://tripscans90.cc/
нажмите здесь https://tripscans90.cc/
his comment is here https://megatonweb.com
hop over to this site https://shinycloud.net
click site https://megatonweb.com
discover this https://shinycloud.net/
that site https://cloudy-host.com/
สล็อตเว็บตรง
อนาคตของสล็อตออนไลน์ในปี 2026: เทคโนโลยี API และอนาคตของ iGaming
อุตสาหกรรมสล็อตออนไลน์ยังคงเติบโตอย่างต่อเนื่องในปี 2026 จากนวัตกรรมที่ช่วยเพิ่มประสิทธิภาพของระบบ ความเสถียร และคุณภาพการใช้งาน
ผู้เล่นสามารถเข้าถึงเกมได้ตลอด 24 ชั่วโมงผ่านสมาร์ทโฟน แท็บเล็ต และคอมพิวเตอร์ โดยไม่มีข้อจำกัดด้านสถานที่ในการใช้งาน
สล็อตออนไลน์ยุคใหม่
สล็อตออนไลน์ยุคใหม่ถูกออกแบบให้มีภาพ เสียง และรูปแบบการเล่นที่ทันสมัยยิ่งขึ้น
หลายเกมใช้ระบบ Progressive Jackpot และกลไกพิเศษที่ช่วยเพิ่มความหลากหลายในการเล่น ทำให้รูปแบบการเล่นมีความหลากหลายมากกว่าเดิม
Direct API มีความสำคัญอย่างไร
Direct API คือระบบเชื่อมต่อข้อมูลระหว่างแพลตฟอร์มและผู้พัฒนาเกมโดยตรง ซึ่งช่วยลด Latency และเพิ่มประสิทธิภาพในการทำงาน
ข้อดีของการเชื่อมต่อแบบ Direct API ได้แก่
ลด Latency
รองรับผู้ใช้งานจำนวนมากพร้อมกัน
ส่งข้อมูลแบบเรียลไทม์
เพิ่มความเสถียรในการให้บริการ
เพิ่มความยืดหยุ่นในการพัฒนา
เทคโนโลยีนี้มักทำงานร่วมกับ Cloud Infrastructure ที่สามารถขยายทรัพยากรได้ตามปริมาณผู้ใช้งาน
ระบบ RNG และความโปร่งใส
RNG เป็นระบบสุ่มผลลัพธ์ที่ใช้ในเกมสล็อต
แต่ละรอบการเล่นจึงเป็นอิสระจากกันและไม่สามารถคาดเดาผลลัพธ์ล่วงหน้าได้
RNG ที่ได้มาตรฐานจะผ่านการตรวจสอบจากหน่วยงานอิสระ เพื่อยืนยันความโปร่งใสและความเป็นธรรมของเกม
Oi gente — free bet. tmj
World Cup 2026 Harambee Stars qualify at good odds. Using 1xBet with pix for fast deposits.
узнать трипскан
learn this here now https://my-fav.net/
Falaaa, dica sobre o jogo do tiger. Já testei no tigrinho a e o controle emocional é key. Betmotion
страница трипскан сайт вход
Your vulnerability and honesty in your posts is truly admirable Thank you for being so open and authentic with your readers
find out https://cloudy-host.com/
посмотреть на этом сайте трип скан официальный сайт
узнать трипскан ссылка
ссылка на сайт трипскан официальный
найти это tripscan официальный сайт
ссылка на сайт tripscan официальный
Читать далее tripscan вход
internet https://megatonweb.com/
Recommended Reading https://megatonweb.com/
здесь сайт трипскан
I wanted to share my experience with super ace bd. I have been using this service for a few weeks now and I must say the service is reliable. Customer support responded quickly when I had a question and I would suggest giving it a try.
Смотреть здесь tripskan
посмотреть на этом сайте tripscan зеркало
читать сайт трипскан
Смотреть здесь трип скан официальный
ссылка на сайт трипскан
I like the helpful information you provide in your articles. I’ll bookmark your blog and check again here frequently. I am quite certain I’ll learn many new stuff right here! Best of luck for the next!
подробнее tripskan
Список ссылок Kraken, актуальные ссылки: инструкция по безопасному входу на ресурс
Поиск стабильного доступа к одной из крупнейших площадок в сфере даркнета часто превращается в сложный процесс из-за политики блокировок интернет-провайдеров. Если основной домен недоступен, пользователи ищут способы сохранить привычный уровень комфорта при совершении сделок. Одним из наиболее удобных решений является использование кракен зеркало — kralc5.cc, которые работают через стандартные протоколы интернета (Clearnet). В этой статье мы разберем, как выбирать рабочие ссылки, обеспечивать безопасность данных и эффективно использовать актуальные зеркала для бесперебойного доступа.
Как работают зеркала и преимущества Clearnet-ссылок
Многие новички ошибочно полагают, что зеркало — это какая-то «серая» копия сайта. На самом деле, зеркало представляет собой дубликат функционала маркетплейса, развернутый на альтернативном домене. Это позволяет пользователям взаимодействовать с платформой привычным способом, используя стандартные браузеры (Chrome, Firefox, Edge).
Преимущества работы через Clearnet-зеркала очевидны:
Скорость работы: В отличие от специализированных браузеров, обычные ссылки обеспечивают высокую скорость загрузки страниц и мгновенный отклик интерфейса.
Удобство интерфейса: Вы можете использовать расширения своего браузера, закладки и привычные настройки отображения.
Стабильность соединения: Если один домен блокируется, администрация быстро разворачивает новое кракен зеркало, которое становится доступным для пользователей.
Для стабильного доступа рекомендуется иметь в закладках минимум 2–3 рабочих варианта, чтобы в случае отказа одного ресурса мгновенно переключаться на другой.
Пошаговая инструкция по безопасному входу на маркетплейс
Чтобы ваш вход в систему был максимально защищенным, необходимо соблюдать алгоритм цифровой гигиены. Использование обычных ссылок требует больше внимания к деталям, чем работа в изолированных сетях.
Использование VPN для защиты IP-адреса
При работе через Clearnet-ссылки ваш IP-адрес остается видимым для сервера и провайдера. Это создает риски для анонимности. Крайне важно использовать качественный VPN-сервис. Он создает зашифрованный туннель, скрывая ваше местоположение. При выборе VPN отдавайте предпочтение сервисам с политикой отсутствия логов (no-logs policy).
Настройка браузера и гигиена сессии
Перед тем как открыть кракен ссылка, проведите аудит своего браузера:
Удалите лишние расширения: Они могут собирать метаданные о вашей активности.
Очистите кэш и куки: Это предотвратит сохранение следов ваших сессий в памяти устройства.
Проверьте утечки DNS: Убедитесь, что браузер не передает запросы к сайту через стандартные DNS-серверы провайдера.
Решение проблем при открытии сайта
Если страница не загружается, следуйте данному алгоритму:
Смена зеркала: Возможно, текущая ссылка уже заблокирована. Перейдите к следующему варианту из вашего списка.
Смена локации VPN: Иногда блокировки работают на уровне конкретных IP-адресов вашего VPN-провайдера. Попробуйте подключиться к другому серверу.
Режим инкогнито: Попробуйте открыть ссылку в приватном окне — это поможет исключить влияние старых данных текущей сессии.
FAQ: Часто задаваемые вопросы
Безопасно ли использовать зеркала вместо основного сайта?
Да, если зеркало является официальным и вы используете его в связке с VPN. Зеркала создаются для обеспечения доступности функционала площадки.
Как понять, что ссылка — это фишинг?
Фишинговые сайты часто имеют мелкие отличия в написании домена (например, замена буквы «о» на «0»). Всегда проверяйте актуальность ссылок в доверенных источниках.
Нужен ли VPN, если я использую обычные ссылки?
Да, при работе через Clearnet-ссылки VPN обязателен для сокрытия вашего реального IP-адреса от провайдера и системы мониторинга.
Заключение
Стабильный доступ к ресурсу через кракен зеркало — это баланс между удобством и мерами безопасности. Используя актуальные ссылки в сочетании с качественным VPN и соблюдая правила цифровой гигиены, вы можете эффективно совершать сделки, минимизируя риски и избегая технических препятствий.
Ключевые слова – – –
кракен площадка каталог
список ссылок кракен
кракен в телеграмме ссылка
кракен интернет магазин
kraken официальный сайт
какая ссылка на кракен
кракен ссылка
кракен ссылка маркет
кракен ссылки актуальные 2026
кракен шоп ссылка
новая ссылка кракен
ссылка на кракен официальный
kraken даркнет рынок ссылки
kraken даркнет ссылка
kraken сайт
актуальные ссылки на кракен
ссылка на сайт кракен
где найти ссылку на кракен
кракен маркетплейс ссылка
кракен переходник ссылка
кракен список рабочих ссылок
кракен ссылка onion
ссылка кракен зеркало 2026
ссылка на кракен сс
ссылка на кракен телеграм
ссылка на кракен тор
кракен маркет шоп
kraken onion link
кракен вход
кракен магазин
кракен даркнет сайт
кракен официальный
кракен рабочее зеркало
адрес сайта кракен
кракен маркетплейс что это
кракен официальный сайт
кракен зеркало тор
зеркало кракен
кракен площадка
кракен даркнет ссылка на сайт
сайт kraken зеркала
стор кракен
кракен войти
kraken магазин интернет
кракен ссылка зеркало
kraken вход
кракен официальный сайт ссылка
кракен маркетплейс
кракен зеркало
кракен официальная ссылка
kraken магазин
кракен фургон в москве
кракен маркет
кракен сайт ссылка
кракен личный кабинет
кракен сайт тор
кракен ссылка тор
кракен купить порошок
кракен купить
кракен вход мобильный
кракен телеграмм канал
кракен магазин зеркало
кракен смотреть
кракен зеркало сайта
актуальная ссылка кракен
кракен онион
кракен вход на сайт
кракен сайт даркнет
как зайти на сайт кракен
сайт кракен даркнет
вход кракен без блокировок
кракен сайт вход
вход в кракен
вход на кракен ссылка
кракен даркнет вход
зеркало кракен сегодня
вход в магазин кракен
ссылка на тор-версию кракен
кракен вход зеркало
кракен сайт телеграм
кракен ссылка рабочего зеркала
вход в личный кабинет кракен
kraken-agent
рабочее зеркало сайта кракен
Hiya, I am really glad I have found this information. Nowadays bloggers publish only about gossip and net stuff and this is actually frustrating.
веб-сайт tripscan вход
Thanks For This Blog, was added to my bookmarks.
Читать далее трип скан
посмотреть в этом разделе трип скан официальный сайт
в этом разделе трип скан вход
подробнее здесь tripscan зеркало
When we look at these issues, we know that they are the key ones for our time.
get more https://megatonweb.com
helpful resources https://shiny-cloud.net/
Well written article. the information shared here is very valuable. I will share this with my friends.
опубликовано здесь https://slon4-at.com/
пояснения https://slon4-at.com/
learn the facts here now https://cloudy-host.com
click for info https://my-fav.net
нажмите https://slon4-at.com
ทดลองเล่นสล็อต pg
ก้าวสู่ยุคใหม่ของสล็อตออนไลน์ปี 2026: วิวัฒนาการของ API ในอุตสาหกรรม iGaming
วงการเกมสล็อตออนไลน์ยังเติบโตอย่างแข็งแกร่งในปี 2026 จากนวัตกรรมที่ช่วยเพิ่มประสิทธิภาพของระบบ ความเสถียร และคุณภาพการใช้งาน
ผู้เล่นสามารถเข้าถึงเกมได้ตลอด 24 ชั่วโมงผ่านสมาร์ทโฟน แท็บเล็ต และคอมพิวเตอร์ โดยสามารถเชื่อมต่อได้จากทุกที่
สล็อตออนไลน์ยุคใหม่
เกมสล็อตสมัยใหม่มาพร้อมกราฟิก 3 มิติ ระบบเสียงที่สมจริง และโบนัสที่หลากหลายกว่าเดิม
เกมจำนวนมากมาพร้อมระบบแจ็คพอตสะสมและฟีเจอร์พิเศษต่าง ๆ ส่งผลให้ประสบการณ์โดยรวมมีความสมจริงและน่าสนใจยิ่งขึ้น
Direct API มีความสำคัญอย่างไร
Direct API เป็นรูปแบบการเชื่อมต่อข้อมูลแบบตรงระหว่างผู้ให้บริการและเกม ช่วยลดความล่าช้าในการส่งข้อมูลและเพิ่มเสถียรภาพของระบบ
ข้อดีของการเชื่อมต่อแบบ Direct API ได้แก่
ลด Latency
รองรับผู้ใช้งานจำนวนมากพร้อมกัน
อัปเดตข้อมูลทันที
ลดโอกาสเกิดปัญหาระบบ
เพิ่มความยืดหยุ่นในการพัฒนา
ระบบดังกล่าวมักเชื่อมโยงกับ Cloud Infrastructure ที่รองรับการขยายตัวของผู้ใช้งาน
ระบบ RNG และความโปร่งใส
Random Number Generator หรือ RNG เป็นกลไกหลักที่ใช้สร้างผลลัพธ์แบบสุ่มในเกม
ผลลัพธ์ในแต่ละรอบไม่มีความเกี่ยวข้องกันและไม่สามารถคาดการณ์ได้
RNG ที่ได้มาตรฐานจะผ่านการตรวจสอบจากหน่วยงานอิสระ เพื่อยืนยันความโปร่งใสและความเป็นธรรมของเกม
узнать ретро казино
на этом сайте casino retro
опубликовано здесь retro casino
выберите ресурсы retro casino
подробнее kraken ссылка зеркало
Подробнее здесь kraken актуальные ссылки
Продолжение кракен onion
выберите ресурсы сайт kraken darknet
作为一部优秀的人文纪录片,它不仅提供了超清的视听享受,更在免费看方面设立了新的标准。 历史纪录片推荐
посмотреть на этом сайте сайт kraken darknet
Читать далее кракен onion
веб-сайте кракен онион зеркало
можно проверить ЗДЕСЬ kraken onion ссылка
проверить сайт kraken онион
подробнее кракен даркнет
веб-сайт kraken ссылка зеркало
узнать больше kraken ссылка зеркало
Подробнее кракен ссылка onion
читать kraken онион
Продолжение kraken onion зеркала
Узнать больше kraken актуальные ссылки
сюда kraken зеркало рабочее
каталог kraken ссылка зеркало
посмотреть на этом сайте kraken официальные ссылки
подробнее kraken актуальные ссылки
посетить сайт kraken маркетплейс зеркало
Продолжение kraken darknet market
узнать больше Здесь kraken зеркало
продолжить kraken darknet
Узнать больше kraken ссылка зеркало
веб-сайте кракен onion
ссылка на сайт кракен onion сайт
Читать далее сайт kraken darknet
ссылка на сайт kraken онион
сюда кракен онион
страница сайт kraken darknet
узнать больше Здесь кракен onion
Some genuinely choice content on this site, bookmarked .
каталог kraken darknet
Подробнее kraken маркетплейс зеркало
Nevertheless, it’s all carried out with tongues rooted solidly in cheeks, and everybody has got nothing but absolutely love for their friendly neighborhood scapegoat. In reality, he is not merely a pushover. He is simply that extraordinary breed of person solid enough to take all that good natured ribbing for what it really is.
сюда кракен онион зеркало
подробнее kraken актуальные ссылки
другие kraken актуальные ссылки
проверить сайт kraken ссылка на сайт
такой kraken darknet ссылка
другие kraken актуальные ссылки
сайт кракен onion
такой кракен ссылка kraken
нажмите сайт kraken darknet
сайт kraken онион тор
Смотреть здесь kraken onion ссылка
Appreciation for taking the time to discuss this topic, I would love to discover more on this topic. If viable, as you gain expertise, would you object to updating the website with further information? It is tremendously beneficial for me.
Подробнее здесь сайт kraken onion
найти это kraken ссылка на сайт
можно проверить ЗДЕСЬ kraken актуальные ссылки
зайти на сайт kraken зеркало
нажмите здесь kraken зеркало
Источник kraken онион тор
узнать больше кракен ссылка
содержание kraken darknet
взгляните на сайте здесь сайт kraken darknet
зайти на сайт kraken ссылка на сайт
посмотреть на этом сайте кракен даркнет
посмотреть на этом сайте kraken актуальные ссылки
здесь kraken ссылка зеркало
такой kraken darknet
подробнее здесь kraken darknet ссылка
этот сайт kraken ссылка зеркало
этот сайт kraken зеркало рабочее
ссылка на сайт кракен onion
нажмите здесь kraken сайт
каталог kraken онион
узнать больше кракен онион зеркало
посетить веб-сайт kraken ссылка тор
ссылка на сайт kraken onion зеркала
посмотреть в этом разделе kraken официальные ссылки
в этом разделе kraken актуальные ссылки
нажмите здесь kraken darknet
посмотреть на этом сайте kraken зеркало рабочее
узнать больше Здесь kraken зеркало
Перейти на сайт kraken онион тор
здесь kraken зеркало
другие сайт kraken onion
сюда кракен ссылка kraken
Смотреть здесь кракен ссылка kraken
другие kraken актуальные ссылки
нажмите здесь kraken официальные ссылки
Продолжение kraken онион
подробнее здесь кракен онион
здесь кракен onion сайт
作为一部优秀的喜剧,它不仅提供了剧终的视听享受,更在分享方面设立了新的标准。 视频网站官网
посмотреть в этом разделе kraken darknet
Смотреть здесь kraken darknet
такой kraken актуальные ссылки
New openings appear every single day, so it pays to check often. On our site you can find job openings near you, in city and beyond, and get matched with roles that actually make sense for your career goals.
на этом сайте кракен онион
нажмите, чтобы подробнее kraken ссылка тор
посмотреть в этом разделе kraken актуальные ссылки
Главная kraken онион тор
веб-сайте кракен ссылка
в этом разделе кракен даркнет
Подробнее kraken онион
веб-сайте кракен даркнет
смотреть здесь kraken онион тор
на этом сайте kraken актуальные ссылки
нажмите kraken ссылка на сайт
здесь кракен онион зеркало
кликните сюда kraken ссылка на сайт
страница кракен darknet
сюда сайт kraken onion
Источник kraken onion зеркала
содержание kraken darknet market
перейти на сайт сайт kraken onion
Getting the right position starts with having the right opportunities in front of you. For exactly that reason you can find view here, both on-site and remote, with nothing left out; so don’t wait around: sign up and stay ahead of the competition.
зайти на сайт актуальные зеркала kraken
этот сайт kraken ссылка тор
на этом сайте kraken актуальные ссылки
здесь kraken ссылка на сайт
solana casino no kyc https://sol-casino-liste.de/
нажмите, чтобы подробнее kraken зеркало
пояснения kraken ссылка на сайт
посмотреть на этом сайте kraken сайт
нажмите здесь кракен даркнет
ссылка на сайт kraken рабочая ссылка onion
такой kraken onion зеркала
нажмите здесь кракен онион зеркало
взгляните на сайте здесь kraken рабочая ссылка onion
найти это kraken актуальные ссылки
кликните сюда kraken онион тор
на этом сайте кракен ссылка kraken
посетить веб-сайт kraken darknet ссылка
такой сайт kraken darknet
Quick pros: aviator game download
* Fast loading times
* Easy to learn gameplay
* Keeps you engaged
* No lag issues
* Runs smooth on most devices
Buenas, tengo una duda sobre el juego del tigre?
узнать больше Здесь kraken onion
Продолжение kraken darknet
mostbet casino promo code – mostbet türkiye güvenilir mi, mostbet promo-code
mostbet türkiye – mostbet türkiye güncel giriş, promo code mostbet
mostbet mobile app – mostbet mobile app, mostbet türkiye girişi
在众多脱口秀中脱颖而出,这部作品凭借完整版的品质和精彩的推荐内容赢得了大量粉丝。 电影库官网
mostbet giriş yap – download mostbet app, mostbet promo code
mostbet türkiye giriş – mostbet app download for android, mostbet türkiye yasal mı
comparativo o melhor que li. cassino sem bonus é real. Bet7k tmj
Thank you pertaining to sharing the following great subject matter on your website. I ran into it on google. I am going to check to come back after you publish additional aricles.
mostbet tr giriş – mostbet türkiye güvenilir mi, mostbet türkiye girişi
Howdy, a helpful article for sure. Thank you.
Nice read, I just passed this onto a colleague who was doing some research on that. And he just bought me lunch as I found it for him smile Therefore let me rephrase that: Thank you for lunch!
Каким бы ни был ваш опыт, всегда найдётся вакансия, которая подойдёт. На нашей платформе вы можете посмотреть исследуйте больше здесь, по специальности и уровню зарплаты, и откликнуться в кратчайшие сроки — именно поэтому тысячи специалистов уже нашли идеальную работу с помощью наших инструментов.
Buenas tardes, quiero entender mejor sobre el juego del tigre? alguien sabe?
mostbet türkiye girişi – mostbet giriş türkiye, mostbet giriş yap
mostbet giriş türkiye – mostbet türkiye giriş, mostbet app download
I think I will become a great follower.Just want to say your post is striking. The clarity in your post is simply striking and i can take for granted you are an expert on this subject.
Сделать настоящий карьерный шаг означает быть в нужном месте в нужное время. С этой целью вы можете просмотреть на нашей платформе, по всей стране, от мегаполисов до небольших городов; не откладывайте: зарегистрируйтесь и будьте на шаг впереди конкурентов.
Boa noite, alguém pode esclarecer sobre roleta onlineou é só marketing? Ninja
Qué tal, tengo una duda sobre slots online? vale la pena?
узнать https://slon4-at.com
Buenas noches. juegos de casino es real.
подробнее здесь https://slon8-cc.at/
Buenas noches, tengo una duda sobre el tigrinho? vale la pena?
каталог https://slon4-at.com
geo ajansı
посмотреть в этом разделе https://slon8-cc.at/
можно проверить ЗДЕСЬ https://slon8-cc.at/
на этом сайте https://slon4-at.com/
888 starz apk https://888-uz5.com/apk/
solana online casino https://sol-casino-liste.de/
Хотите найти вакансии рядом с домом и устали получать отказы? Прямо здесь вы можете найти по этому адресу, абсолютно бесплатно, с фильтрами по региону и зарплате, что существенно повышает шансы получить заветное приглашение на собеседование.
найти это https://slon4-at.com/
hoki1881
A cool post there mate ! Thank you for posting.
I wrote down your blog in my bookmark. I hope that it somehow did not fall and continues to be a great place for reading texts.
веб-сайт https://slon4-at.com
Way better than what I was using before honestly. The tracking system is faster, the layout makes more sense, and it doesnt crash as much as that other service I had. Definitely switching over permanently this time. casino score
веб-сайте https://slon8-cc.at/
Fala, betting on Camarões for World Cup 2026. Odds are decent on Stake. opay deposit took minutes.
Your posts provide a clear, concise description of the issues.
Brasil at 22Bet — opay deposit confirmed. Good odds for WC2026 group stage.
сюда https://slon4-at.com/
на этом сайте https://ivremont.ru/remont-kuhni
взгляните на сайте здесь https://ivremont.ru/
Главная https://slon8-cc.at/
каталог https://slon8-cc.at
Найти хорошую работу означает знать, где и что смотреть. С этой целью вы можете найти работа продавцом сегодня, с удобной сортировкой по зарплате и графику; не откладывайте: хорошие места разбирают быстро.
узнать больше https://slon8-cc.at
узнать https://slon4-at.com/
Fala, guia prático pra betting world cup 2026. Camarões odds look interesting. Stake works well with opay.
содержание https://slon8-cc.at/
читать https://ivremont.ru/evroremont
нажмите здесь tripscan официальный сайт
ссылка на сайт https://slon4-at.com
зайти на сайт https://ivremont.ru/remont-kuhni
Узнать больше tripscan сайт
Новое место после перерыва в Москве — это проще, чем вы думаете. Именно поэтому наш сервис помогает: вы просматриваете вакансии охранником Москва сегодня, с актуальными данными и контактами московских работодателей, и откликайтесь на понравившиеся прямо сейчас.
Yo, explicação simples e direta sobre cassino bom. jogo responsável? alguém já ganhou com isso?
нажмите здесь трип скан
узнать больше Здесь сайт трипскан
sapporo88
страница сайт трипскан
Хотите сменить место работы в городе и не хотите тратить время впустую? На нашем портале вы можете посмотреть свежие вакансии водитель Краснодар, обновляемые ежедневно и охватывающие все профессии, что существенно повышает шансы получить приглашение на собеседование уже сегодня.
проверить сайт tripscan официальный сайт
взгляните на сайте здесь https://slon8-cc.at/
взгляните на сайте здесь трипскан ссылка
подробнее tripscan сайт
read this https://2222bet-play.com/login
visit the site https://2222bet-play.com/app
over here https://2222bet-play.com/bonuses
internet https://2222bet-play.com/bonuses
my link https://2222bet-play.com/app
site link https://2222bet-play.com/app
index https://2222bet-play.com/login
click here for info https://2222bet-play.com/bonuses
check https://2222bet-play.com/slots
сюда ретро казино
read the full info here https://2222bet-play.com/app
посмотреть в этом разделе retro casino
additional info https://2222bet.co.com/
read more https://2222bet-play.com/bonuses
you could try this out https://2222bet-play.com/app
ссылка на сайт https://trip75-at.cc
сайт https://trip75-at.cc
important source https://2222bet-play.com/login
каталог tripscan
click over here now https://2222bet-play.com/slots
why not look here https://2222bet-play.com/login
Подробнее здесь trip75 at
Читать далее https://trip75-at.cc
посетить веб-сайт трипскан вход
сюда trip75 co trip75 at
Перейти на сайт https://trip75at.us/
Читать далее https://trip75-at.cc/
Следующая страница https://trip75-at.cc/
в этом разделе сайт трипскан
this website https://2222bet-play.com/bonuses
в этом разделе casino retro
взгляните на сайте здесь new retro
go to this website https://2222bet-play.com/app
посетить веб-сайт new retro casino
ссылка на сайт newretrocasino
ссылка на сайт трип скан
this post https://2222bet-play.com/login
веб-сайте new retro
другие trip75 co
Смотреть здесь trip75 at
pop over to these guys https://2222bet.co.com/
Главная трипскан
подробнее https://trip75-at.cc
go to my blog https://2222bet-play.com/slots
перенаправляется сюда trip75 at
другие trip75 co
в этом разделе https://trip75at.us/
find out https://2222bet.co.com/
опубликовано здесь https://trip75-at.cc/
на этом сайте https://trip75-at.cc/
содержание new retro casino
Читать далее trip75 co trip75 at
straight from the source https://2222bet-play.com/slots
кликните сюда casino retro
смотреть здесь сайт трипскан
этот сайт трип скан
веб-сайте tripscan
Каждое утро петербургские компании публикуют свежие предложения. Сервисные компании расширяют штат — и все эти предложения собраны у нас. Зайдите вакансии Петербург рядом на нашем портале и найдите то, что нужно — мы обновляем базу каждый день, чтобы вы не упустили ничего важного.
проверить сайт https://trip75-at.cc/
нажмите trip75 co trip75 at
Visit Website https://2222bet-play.com/login
в этом разделе trip75 at
каталог retro casino
Get the facts https://2222bet-play.com/bonuses
посмотреть в этом разделе сайт трипскан
Resources https://2222bet-play.com/slots
посетить сайт https://trip75at.us
нажмите здесь трип скан
каталог https://trip75-at.cc
на этом сайте https://trip75at.us/
over at this website https://2222bet.co.com/
Узнать больше ретро казино
интернет tripscan
find this https://2222bet-play.com/login
веб-сайт casino retro
this link https://2222bet-play.com/login
посмотреть в этом разделе https://trip75-at.cc/
this https://2222bet-play.com/slots
ссылка на сайт https://trip75at.us/
my site https://2222bet-play.com/slots
перейти на сайт trip75 co
узнать больше https://trip75-at.cc/
другие https://trip75-at.cc
navigate to these guys https://2222bet-play.com/bonuses
нажмите здесь https://trip75-at.cc/
этот контент tripscan
узнать https://trip75at.us
этот сайт newretrocasino
смотреть здесь https://trip75-at.cc/
такой https://trip75at.us
try this site https://2222bet.co.com/
see here now https://2222bet.co.com/
helpful site https://2222bet-play.com/app
click here now https://2222bet-play.com/bonuses
Смотреть здесь https://trip75at.us
her response https://2222bet.co.com/
Следующая страница new retro
сюда retro casino
Читать далее tripscan
на этом сайте new retro casino
узнать больше Здесь https://trip75-at.cc/
click here to find out more https://2222bet-play.com/login
здесь new retro casino
содержание https://trip75-at.cc
internet https://2222bet.co.com/
navigate to this site https://2222bet-play.com/slots
Узнать больше https://trip75-at.cc
проверить сайт сайт трипскан
сюда newretrocasino
каталог casino retro
сайт trip75 at
содержание ретро казино
find this https://2222bet.co.com/
перенаправляется сюда tripscan
посмотреть в этом разделе https://trip75-at.cc
подробнее https://trip75at.us
здесь трипскан вход
take a look at the site here https://2222bet-play.com/login
подробнее trip75 at
have a peek at these guys https://2222bet-play.com/login
подробнее здесь сайт трипскан
нажмите, чтобы подробнее new retro casino
Источник newretrocasino
здесь https://trip75-at.cc
нажмите трипскан
go to this web-site https://2222bet-play.com/app
каталог https://trip75-at.cc/
этот сайт трип скан
you could try this out https://2222bet.co.com/
More Bonuses https://2222bet-play.com/slots
посмотреть на этом сайте ретро казино
такой tripscan
такой new retro casino
ссылка на сайт casino retro
websites https://2222bet.co.com/
такой https://trip75at.us/
additional hints https://2222bet.co.com/
my website https://2222bet.co.com/
другие трипскан вход
Recommended Site https://2222bet-play.com/app
my latest blog post https://2222bet.co.com/
view it https://2222bet.co.com/
site web https://2222bet-play.com/app
moved here https://2222bet-play.com/app
Продолжение https://trip75-at.cc
Continue https://2222bet-play.com/bonuses
перенаправляется сюда https://trip75-at.cc
нажмите https://trip75-at.cc
подробнее здесь retro casino
выберите ресурсы трипскан вход
ссылка на сайт trip75 co trip75 at
узнать tripscan
узнать больше Здесь casino retro
сайт ретро казино
нажмите здесь new retro casino
next https://2222bet-play.com/slots
содержание new retro
site link https://2222bet.co.com/
кликните сюда трипскан вход
over at this website https://2222bet-play.com/slots
нажмите здесь trip75 co
веб-сайт https://trip75at.us/
страница newretrocasino
найти это https://trip75-at.cc
Смотреть здесь trip75 at
Следующая страница трипскан вход
In Deutschland wird in allen Branchen eingestellt — von der Pflege bis zur IT. Das bedeutet, dass der Wettbewerb um gute Arbeitskrafte den Bewerbern zugute kommt. Stobern Sie durch Stellenangebote Ingenieur Deutschland direkt hier, bewerben Sie sich mit einem Klick und starten Sie noch heute in Ihren neuen Job.
читать https://trip75-at.cc/
Читать далее newretrocasino
Главная https://trip75at.us
узнать ретро казино
пояснения new retro
Ищете стабильную работу с хорошей зарплатой в Новосибирске? Именно такие вакансии ждут вас здесь. Просмотрите свежие предложения о работе Новосибирск, с удобным поиском по районам и специальностям, и откликайтесь на то, что действительно подходит.
зайти на сайт https://trip75at.us
узнать больше trip75 co trip75 at
official statement https://2222bet.co.com/
check my site https://2222bet-play.com/app
ссылка на сайт https://trip75at.us
Главная https://trip75-at.cc/
каталог trip75 co trip75 at
опубликовано здесь new retro casino
Источник https://trip75-at.cc
взгляните на сайте здесь trip75 at
go to these guys https://2222bet-play.com/app
такой new retro
Для тех, кто ищет информацию по теме “Актуальные новости и события Забайкалья”, есть отличная статья.
Вот, можете почитать:
https://75media.ru
посмотреть на этом сайте сайт трипскан
узнать больше retro casino
нажмите, чтобы подробнее new retro casino
взгляните на сайте здесь retro casino
другие newretrocasino
здесь trip75 at
содержание ретро казино
этот сайт https://trip75at.us
нажмите здесь ретро казино
Подробнее casino retro
продолжить https://trip75at.us
пояснения casino retro
сюда https://trip75at.us
ссылка на сайт new retro
интернет ретро казино
посетить веб-сайт ретро казино
Подробнее newretrocasino
Подробнее retro casino
Источник https://trip75at.us
найти это new retro casino
взгляните на сайте здесь newretrocasino
другие new retro casino
можно проверить ЗДЕСЬ new retro casino
перенаправляется сюда https://trip75at.us/
Whether you want full-time employment or flexible part-time shifts — the right vacancy is out there if you search in the right place. Explore vacancies in the UK on our platform, filter by your preferred location and salary and start applying — it’s completely free and straightforward.
сайт https://trip75at.us/
Сделайте карьерный шаг прямо сейчас — Петербург даёт такую возможность. На нашем сайте вы найдёте новые вакансии СПб сегодня, от рабочих специальностей до управленческих позиций, и сможете откликнуться на лучшие из них в несколько кликов.
другие trip75 at
Продолжение трип скан
узнать больше Здесь https://trip75at.us/
подробнее трип скан
сюда new retro casino
в этом разделе trip75 co
посмотреть в этом разделе trip75 co
Главная https://trip75at.us/
страница tripscan
Подробнее здесь https://trip75at.us
Ai governance
ссылка на сайт https://trip75at.us
нажмите https://trip75at.us
нажмите здесь trip75 at
нажмите, чтобы подробнее https://trip75at.us
По теме “Обсуждение практической химии для юных химиков”, там просто кладезь информации.
Вот, можете почитать:
https://Khimie.ru
посмотреть на этом сайте https://trip75at.us
Перейти на сайт ретро казино
взгляните на сайте здесь newretrocasino
страница casino retro
веб-сайт https://trip75at.us
посмотреть на этом сайте trip75 at
Казань стабильно входит в топ городов по качеству жизни и уровню занятости, поэтому предложений о работе становится всё больше с каждым годом. На нашем сайте собраны вакансии кладовщик Казань, от промышленности и нефтехимии до IT и финансов, так что найти подходящее место можно буквально за один вечер.
на этом сайте retro casino
посмотреть на этом сайте сайт трипскан
перейдите на этот сайт new retro
Подробнее trip75 co
выберите ресурсы https://trip71.us
посетить сайт retro casino
узнать больше Здесь casino retro
зайти на сайт https://trip71.us
Been living here for years but ready for something better? This resource will help you navigate the Canadian job market with ease. Discover kitchen jobs Canada today, from small local businesses to major Canadian employers, and take your first step toward a new job today.
веб-сайте https://trip71.us
продолжить https://trip71.us
Список ссылок Kraken, актуальные ссылки: инструкция по безопасному входу на ресурс
|Поиск стабильного доступа к одной из крупнейших площадок в сфере даркнета часто превращается в сложный процесс из-за политики блокировок интернет-провайдеров. Если основной домен недоступен, пользователи ищут способы сохранить привычный уровень комфорта при совершении сделок. Одним из наиболее удобных решений является использование кракен зеркало — ССЫЛКА, которые работают через стандартные протоколы интернета (Clearnet). В этой статье мы разберем, как выбирать рабочие ссылки, обеспечивать безопасность данных и эффективно использовать актуальные зеркала для бесперебойного доступа. | |Как работают зеркала и преимущества Clearnet-ссылок |Многие новички ошибочно полагают, что зеркало — это какая-то «серая» копия сайта.
На самом деле, зеркало представляет собой дубликат функционала маркетплейса, развернутый на альтернативном домене. Это позволяет пользователям взаимодействовать с платформой привычным способом, используя стандартные браузеры (Chrome, Firefox, Edge). |
|Преимущества работы через Clearnet-зеркала очевидны: | |Скорость работы: В отличие от специализированных браузеров, обычные ссылки обеспечивают высокую скорость загрузки страниц и мгновенный отклик интерфейса. |Удобство интерфейса: Вы можете использовать расширения своего браузера, закладки и привычные настройки отображения. |Стабильность соединения: Если один домен блокируется, администрация быстро разворачивает новое кракен зеркало, которое становится доступным для пользователей. |Для стабильного доступа рекомендуется иметь в закладках минимум 2–3 рабочих варианта, чтобы в случае отказа одного ресурса мгновенно переключаться на другой. | |Пошаговая инструкция по безопасному входу на маркетплейс |Чтобы ваш вход в систему был максимально защищенным, необходимо соблюдать алгоритм цифровой гигиены. Использование обычных ссылок требует больше внимания к деталям, чем работа в изолированных сетях. | |Использование VPN для защиты IP-адреса |При работе через Clearnet-ссылки ваш IP-адрес остается видимым для сервера и провайдера. Это создает риски для анонимности. Крайне важно использовать качественный VPN-сервис. Он создает зашифрованный туннель, скрывая ваше местоположение. При выборе VPN отдавайте предпочтение сервисам с политикой отсутствия логов (no-logs policy). | |Настройка браузера и гигиена сессии |Перед тем как открыть кракен ссылка, проведите аудит своего браузера: | |Удалите лишние расширения: Они могут собирать метаданные о вашей активности. |Очистите кэш и куки: Это предотвратит сохранение следов ваших сессий в памяти устройства. |Проверьте утечки DNS: Убедитесь, что браузер не передает запросы к сайту через стандартные DNS-серверы провайдера. |Решение проблем при открытии сайта | |Если страница не загружается, следуйте данному алгоритму: | |Смена зеркала: Возможно, текущая ссылка уже заблокирована. Перейдите к следующему варианту из вашего списка. |Смена локации VPN: Иногда блокировки работают на уровне конкретных IP-адресов вашего VPN-провайдера. Попробуйте подключиться к другому серверу. |Режим инкогнито: Попробуйте открыть ссылку в приватном окне — это поможет исключить влияние старых данных текущей сессии. | |FAQ: Часто задаваемые вопросы | |Безопасно ли использовать зеркала вместо основного сайта? |Да, если зеркало является официальным и вы используете его в связке с VPN. Зеркала создаются для обеспечения доступности функционала площадки. | |Как понять, что ссылка — это фишинг? |Фишинговые сайты часто имеют мелкие отличия в написании домена (например, замена буквы «о» на «0»). Всегда проверяйте актуальность ссылок в доверенных источниках. | |Нужен ли VPN, если я использую обычные ссылки? |Да, при работе через Clearnet-ссылки VPN обязателен для сокрытия вашего реального IP-адреса от провайдера и системы мониторинга. | |Заключение |Стабильный доступ к ресурсу через кракен зеркало — это баланс между удобством и мерами безопасности. Используя актуальные ссылки в сочетании с качественным VPN и соблюдая правила цифровой гигиены, вы можете эффективно совершать сделки, минимизируя риски и избегая технических препятствий. | | |Ключевые слова – – – | |кракен площадка каталог |список ссылок кракен |кракен в телеграмме ссылка |кракен интернет магазин |kraken официальный сайт |какая ссылка на кракен |кракен ссылка |кракен ссылка маркет |кракен ссылки актуальные 2026 |кракен шоп ссылка |новая ссылка кракен |ссылка на кракен официальный |kraken даркнет рынок ссылки |kraken даркнет ссылка |kraken сайт |актуальные ссылки на кракен |ссылка на сайт кракен |где найти ссылку на кракен |кракен маркетплейс ссылка |кракен переходник ссылка |кракен список рабочих ссылок |кракен ссылка onion |ссылка кракен зеркало 2026 |ссылка на кракен сс |ссылка на кракен телеграм |ссылка на кракен тор |кракен маркет шоп |kraken onion link |кракен вход |кракен магазин |кракен даркнет сайт |кракен официальный |кракен рабочее зеркало |адрес сайта кракен |кракен маркетплейс что это |кракен официальный сайт |кракен зеркало тор |зеркало кракен |кракен площадка |кракен даркнет ссылка на сайт |сайт kraken зеркала |стор кракен |кракен войти |kraken магазин интернет |кракен ссылка зеркало |kraken вход |кракен официальный сайт ссылка |кракен маркетплейс |кракен зеркало |кракен официальная ссылка |kraken магазин |кракен фургон в москве |кракен маркет |кракен сайт ссылка |кракен личный кабинет |кракен сайт тор |кракен ссылка тор |кракен купить порошок |кракен купить |кракен вход мобильный |кракен телеграмм канал |кракен магазин зеркало |кракен смотреть |кракен зеркало сайта |актуальная ссылка кракен |кракен онион |кракен вход на сайт |кракен сайт даркнет |как зайти на сайт кракен |сайт кракен даркнет |вход кракен без блокировок |кракен сайт вход |вход в кракен |вход на кракен ссылка |кракен даркнет вход |зеркало кракен сегодня |вход в магазин кракен |ссылка на тор-версию кракен |кракен вход зеркало |кракен сайт телеграм |кракен ссылка рабочего зеркала |вход в личный кабинет кракен |kraken-agent |рабочее зеркало сайта краке]
Давно не выходили на рынок труда и потеряли ориентиры? Всё проще, чем кажется. Зайдите на наш сайт вы можете посмотреть вакансии рядом с домом Нижний Новгород отсортированные по свежести и релевантности — и уже через несколько минут у вас будет список мест, куда стоит отправить резюме.
Good day everyone. I thought I would share my thoughts on the 789bet platform after having used it for some time now. The overall experience has been satisfactory, with prompt customer support and a fairly intuitive design. I did encounter one minor issue with account verification, but it was resolved rather quickly. I would say it is worth a look if you are considering alternatives. Cheers. 789bet
With internet full of dupe articles it is nice to find original content like yours thank you so very much.
Thanks for some other great post. Where else may anybody get that kind of information in such an ideal method of writing? I’ve a presentation next week, and I am at the look for such information.
Not sure where to start your job search in Australia? It’s more straightforward than you might think. Explore jobs with experience Australia right here — filtered by job type, pay rate and state — and within minutes you’ll have a solid shortlist of roles to go after.
Appreciation for taking the time to discuss this topic, I would love to discover more on this topic. If viable, as you gain expertise, would you object to updating the website with further information? It is tremendously beneficial for me.
I will share you blog with my sis.
I really believe you will do well in the future I appreciate everything you have added to my knowledge base.
This is definitely a wonderful webpage, thanks a lot..
I saw a similar post on another website but the points were not as well articulated.
Рынок труда Челябинска охватывает металлургию, машиностроение, строительство, торговлю и десятки других отраслей, поэтому найти достойное место реально вне зависимости от опыта и специальности. На нашем сайте собраны вакансии бухгалтер Челябинск, от металлургии и машиностроения до торговли и логистики, так что найти подходящее место можно буквально за один вечер.
For anyone who knows the feeling of wanting a better haircut but not knowing how to describe it, this platform offers a more precise path. A single selfie and a short questionnaire are enough for the AI to review face geometry, hair structure, and personal context, then assemble 10 suitable cuts, realistic previews, and a salon-ready plan. Behind the result is not a simple filter, but a mathematical model with more than 50 parameters and precise 3D head modeling, designed to show why a style works for you. Instead of relying on a quick visual guess, the platform combines 50+ signals with 3D head mapping to show why each style belongs to you. Rather than generic “wig” overlays, the report presents lifelike previews that reflect actual shape and proportion. Additionally, the package includes a barber-friendly instruction set, so the recommendation is not only attractive on screen but also usable in the chair. In just a few steps, you can move from a single photo to 10 matched options and a PDF report, with no sign-up friction. For those who want more than a pretty filter, it offers a useful bridge between taste, anatomy, and everyday wearability. https://hairstyleai.space/
Net klaar met je opleiding of mbo en klaar om aan de slag te gaan? Ons platform is precies gemaakt voor mensen zoals jij. Bekijk vacatures – verpleegkundige Nederland, van kleine mkb-bedrijven tot grote nationale werkgevers, en zet vandaag nog de eerste stap naar een nieuwe baan.
посмотреть в этом разделе https://slonz9.cc/
веб-сайте https://slon9-cc.com/
Смотреть здесь https://slonz9.cc/
ссылка на сайт https://slon9-cc.com/
Главная https://slon9-cc.com
зайти на сайт https://slon9-cc.com
интернет https://slon9-cc.com
другие https://slon9-cc.com
Great post. Just a heads up – I am running Ubuntu with the beta of Firefox and the navigation of your blog is kind of broken for me.
узнать больше https://slon9-cc.com/
зайти на сайт https://slon9-cc.com/
Узнать больше https://slon9-cc.com
Следующая страница https://slon9-cc.com
другие https://slon9-cc.com/
перейти на сайт https://slonz9.cc/
нажмите, чтобы подробнее https://slonz9.cc/
перенаправляется сюда https://slon9-cc.com/
посетить сайт https://slonz9.cc/
узнать больше https://slonz9.cc
в этом разделе https://slon9-cc.com
подробнее здесь https://slon9-cc.com
узнать больше Здесь https://slon9-cc.com/
Подробнее здесь https://slon9-cc.com/
веб-сайте https://slonz9.cc/
каталог https://slon9-cc.com
Источник https://slon9-cc.com
подробнее здесь https://slonz9.cc/
Перейти на сайт https://slon9-cc.com/
Продолжение https://slon9-cc.com/
Перейти на сайт https://slon9-cc.com
на этом сайте https://slonz9.cc
здесь https://slon9-cc.com/
пояснения https://slonz9.cc
Лучшие предложения в Краснодаре разбирают раньше, чем вы думаете. С учётом этого не стоит откладывать поиск на потом. На нашем портале вы можете найти официальное трудоустройство Краснодар, с возможностью быстрого отклика прямо со страницы, и опередите других соискателей.
сюда https://slon9-cc.com
нажмите здесь https://slon9-cc.com
Excellent article!! I am an avid reader of your website:D keep on posting that good content. and I’ll be a regular visitor for a very long time!!
содержание https://slonz9.cc/
выберите ресурсы https://slon9-cc.com/
опубликовано здесь https://slon9-cc.com/
Hey! awesome blog! I happen to be a daily visitor to your site (somewhat more like addict 😛 ) of this website. Just wanted to say I appreciate your blogs and am looking forward for more!
Подробнее https://slon9-cc.com
Ai governance
продолжить https://slon9-cc.com
нажмите https://slon9-cc.com
Главная https://slonz9.cc/
Узнать больше https://slonz9.cc/
другие https://slonz9.cc/
нажмите здесь https://slonz9.cc/
ссылка на сайт https://slonz9.cc/
Продолжение https://slonz9.cc/
узнать больше Здесь https://slonz9.cc/
подробнее https://slon9-cc.com/
нажмите https://slonz9.cc
It’s time for communities to rally.
проверить сайт https://slonz9.cc/
здесь https://slon9-cc.com
подробнее https://slonz9.cc/
смотреть здесь tripscan зеркало
Смотреть здесь https://slon9-cc.com/
Trouver un bon emploi en France n’est pas une question de chance mais de methode. Sur notre site vous pouvez consulter aide-soignant emploi France, avec des salaires actualises et les coordonnees directes des employeurs — ce qui vous fait gagner du temps et augmente vos chances d’etre contacte rapidement.
другие tripscan сайт
такой https://slonz9.cc/
здесь https://slonz9.cc
взгляните на сайте здесь https://slon9-cc.com
сайт https://slon9-cc.com
веб-сайт https://slonz9.cc
найти это https://slon9-cc.com/
перейдите на этот сайт https://slon9-cc.com
сайт https://slonz9.cc/
перейдите на этот сайт https://slon9-cc.com/
Следующая страница https://slon9-cc.com/
в этом разделе https://slon9-cc.com/
перейдите на этот сайт tripscan официальный
проверить сайт https://slon9-cc.com
подробнее здесь https://slonz9.cc
От офисных до полностью удалённых позиций, вакансии существуют почти в каждой сфере. На нашей платформе вы можете посмотреть новые вакансии, не выходя из дома, за несколько кликов, и совсем скоро вы будете намного ближе к подписанию оффера с компанией своей мечты.
другие https://slonz9.cc
страница https://slon9-cc.com/
содержание https://slon9-cc.com
кликните сюда https://slonz9.cc
посмотреть на этом сайте https://slon9-cc.com
Перейти на сайт https://slonz9.cc
взгляните на сайте здесь https://slonz9.cc
перейдите на этот сайт https://slonz9.cc
Читать далее https://slonz9.cc
Главная https://slonz9.cc
Ai governance
нажмите https://slonz9.cc/
Deneme bonusu veren ve en iyi deyeye boyuyu veyen siyeyer bahis siteleri burada. Güvenilir sitelerle bonuslarınızı hemen alın, Yeni Üyelere deneme bonusu fırsatını kaçırmayın
смотреть здесь tripskan
Il mercato del lavoro italiano continua a crescere, e la ricerca di personale cresce con esso. Che cosa vuol dire che c’e sempre un’offerta che si adatta alle tue competenze. Consulta offerte — pulizia Italia sulla nostra piattaforma, salva le tue preferite e muoviti verso il tuo prossimo lavoro oggi.
перенаправляется сюда https://slonz9.cc/
ссылка на сайт https://slonz9.cc/
ссылка на сайт https://slonz9.cc
взгляните на сайте здесь https://slonz9.cc/
https://ro.com/ ro
содержание https://slonz9.cc/
кликните сюда https://slonz9.cc/
Читать далее https://slonz9.cc
продолжить https://slonz9.cc
узнать больше https://slonz9.cc/
Главная https://slonz9.cc/
продолжить https://slonz9.cc/
посмотреть в этом разделе https://slonz9.cc
здесь https://slonz9.cc
этот сайт https://slonz9.cc
Небольшой стаж? Отличный момент для старта. Среди наших предложений вы найдёте вакансии – кладовщик специально для начинающих, с обучением на месте, и получите реальный шанс построить карьеру с нуля.
подробнее https://slonz9.cc
узнать больше https://slonz9.cc
Подробнее здесь https://slonz9.cc
пояснения https://slonz9.cc
этот сайт https://slonz9.cc/
Polski rynek pracy porusza sie szybko, a dobre oferty nie pozostaja dlugo otwarte. Dlatego sledzenie nowych ogloszen daje Ci rzeczywista przewage. Na naszej stronie mozesz sprawdzic dobrze platna praca Polska, swieze, zweryfikowane i aktualne, i wyprzedzic innych kandydatow.
этот контент https://slonz9.cc
другие https://slonz9.cc/
посмотреть в этом разделе трипскан вход
Статья о важности обнаружения и фикса багов
жесткий секс с игрушками
выберите ресурсы https://slonz9.cc
посмотреть на этом сайте tripscan сайт
узнать больше Здесь https://slonz11.cc/
Источник https://slon10-cc.com
ссылка на сайт https://slon10-cc.com
на этом сайте https://slon10-cc.com
смотреть здесь https://slonz11.cc/
здесь https://slonz11.cc/
Прозрачные условия работы защищают вас как сотрудника. На вакансии – в моём городе можно выбрать тип оформления в фильтрах — выбирайте работу, которая даёт уверенность в завтрашнем дне.
подробнее https://slonz11.cc/
проверить сайт tripscan вход
узнать больше сайт трип скан
здесь https://slonz11.cc
перенаправляется сюда https://slonz11.cc/
выберите ресурсы https://slon10-cc.com/
Been using 789 bet for a couple weeks now and honestly the interface is pretty clean, no complaints there. One thing that bugged me tho is the withdrawal process takes longer than I expected, but otherwise its solid.
Смотреть здесь https://slon10-cc.com/
La vacante adecuada en Espana es mas facil de encontrar cuando estas en la plataforma correcta. En nuestro sitio puedes explorar vacantes cerca de mi Espana, sin reclutadores, sin tarifas ocultas, solo empleos reales — ahorrandote tiempo y haciendo que tu solicitud sea vista mas rapido.
в этом разделе https://slonz11.cc/
Jump into excitement! Impose on behave crack games at our casino – slots, blackjack, roulette & more. Gain a victory in big with eleemosynary bonuses and free spins. Join now & seek your entitled tender!
https://gxbetcasino-nl.com
веб-сайт сайт трип скан
Preparation goes a long way, but without the right job listings you won’t get far. On our platform you can create a profile in just a few minutes, then browse remote jobs matched to your role and location — making your search faster and way more targeted.
подробнее здесь https://slon10-cc.com/
подробнее https://slon10-cc.com/
These kind of posts are always inspiring and I prefer to read quality content so I happy to find many good point here in the post. writing is simply wonderful! thank you for the post
This information is critically needed, thanks.
продолжить https://slonz11.cc
перенаправляется сюда https://slon10-cc.com/
посмотреть на этом сайте https://slon10-cc.com/
Нужная вакансия в Казахстане находится быстрее, если вы на правильной платформе. Здесь вы можете просматривать вакансии водитель Казахстан, без посредников, без скрытых комиссий, только реальные вакансии — экономя ваше время и помогая вашей заявке быть замеченной быстрее.
There is so much to try to understand
Thank you for all the information was very accurate, just wondering if all this is possible.~
I think other website proprietors should take this web site as an model, very clean and great user pleasant style and design .
A job with full benefits is worth more than its salary alone. Don’t accept an offer without knowing what’s included. On engineer jobs – experienced most top employers list health, dental, and retirement info — so you know exactly what you’re walking into.
выберите ресурсы https://slon10-cc.com
перенаправляется сюда https://slon10-cc.com
в этом разделе https://trip71.us
найти это https://slon10-cc.com
узнать больше https://trip71.us/
страница https://slon10-cc.com/
каталог https://trip71.us
этот контент https://slon10-cc.com
Главная https://slon10-cc.com
веб-сайт https://trip71.us
нажмите https://slon10-cc.com
такой https://slon10-cc.com
Новые возможности появляются в каждом регионе каждый день. Транспортные и логистические фирмы нанимают водителей и складских сотрудников по всей стране — каждое из этих объявлений прямо здесь, на нашем сайте. Просмотрите работа – охрана Узбекистан на нашей платформе и откликайтесь, пока их не заняли — мы обновляемся каждый день, чтобы вы не пропустили хорошее предложение.
здесь https://slon10-cc.com/
Перейти на сайт https://slon10-cc.com/
Читать далее https://slon10-cc.com/
посетить веб-сайт https://trip71.us
читать https://slon10-cc.com/
можно проверить ЗДЕСЬ https://trip71.us
Читать далее https://slon10-cc.com
Источник https://trip71.us/
нажмите здесь https://slon10-cc.com/
посетить сайт https://slon10-cc.com/
такой https://trip71.us
пояснения https://trip71.us/
Подробнее здесь https://trip71.us
Узнать больше https://trip71.us
можно проверить ЗДЕСЬ https://slon10-cc.com/
посмотреть на этом сайте https://slon10-cc.com
пояснения https://slon10-cc.com/
посетить сайт https://trip71.us/
взгляните на сайте здесь https://slon10-cc.com
сайт https://slon10-cc.com
другие https://trip71.us
на этом сайте https://slon10-cc.com/
нажмите здесь https://slon10-cc.com
кликните сюда https://slon10-cc.com
посмотреть в этом разделе https://trip71.us
кликните сюда https://slon10-cc.com/
зайти на сайт https://trip71.us
веб-сайте https://slon10-cc.com/
проверить сайт https://slon10-cc.com/
сюда https://trip71.us
перейти на сайт https://slon10-cc.com
страница https://slon10-cc.com
Тенденции найма постоянно меняются, поэтому время может решить всё. На нашей платформе вы можете найти новые вакансии – сегодня, рядом с вами и в других регионах, и получать предложения, которые действительно соответствуют вашим карьерным целям.
Подробнее https://trip71.us
этот сайт https://trip71.us/
продолжить https://trip71.us
такой https://slon10-cc.com/
Узнать больше https://slon10-cc.com/
веб-сайт https://trip71.us
в этом разделе https://trip71.us/
сюда https://trip71.us
опубликовано здесь https://trip71.us/
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
Для тех, кто ищет информацию по теме “Советы мастеров по плетению корзин из лозы”, нашел много полезного.
Ссылка ниже:
https://fixora.ru/%d0%b8%d0%bd%d1%81%d1%82%d1%80%d1%83%d0%bc%d0%b5%d0%bd%d1%82%d1%8b-%d0%b4%d0%bb%d1%8f-%d0%bf%d0%bb%d0%b5%d1%82%d0%b5%d0%bd%d0%b8%d1%8f-%d0%ba%d0%be%d1%80%d0%b7%d0%b8%d0%bd-%d0%b8%d0%b7-%d0%bb%d0%be/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
узнать newretrocasino
сюда https://trip71.us/
страница https://trip71.us/
Перейти на сайт https://trip71.us
зайти на сайт https://trip71.us
сюда casino retro
на этом сайте https://trip71.us
Подробнее https://trip71.us/
на этом сайте https://trip71.us/
El flujo de nuevas ofertas de empleo en Mexico no se detiene. Los hospitales y centros de atencion estan reclutando activamente — cada una de estas ofertas esta aqui, en nuestro sitio. Revisa portal de empleo Mexico aqui y solicita antes de que se ocupen — actualizamos cada dia para que no te pierdas una buena oportunidad.
сайт ретро казино
кликните сюда https://trip71.us
другие https://trip71.us
нажмите здесь new retro casino
перейти на сайт https://trip71.us/
звоните круглосуточно по телефону горячей линии клиники: наши специалисты готовы оказать необходимую помощь в решении проблемы алкогольной зависимости.
Узнать больше – вывод из запоя недорого в сочи
интернет https://trip71.us/
другие casino retro
There is perceptibly a lot to identify about this. I consider you made some good points in features also.
Our family had similar issues, thanks.
Hello there I am so delighted I found your weblog, I really found you by mistake, while I was searching on Google for something else, Anyhow I am here now and would just like to say cheers for a remarkable post and a all round exciting blog (I also love the theme/design), I don’t have time to browse it all at the moment but I have book-marked it and also included your RSS feeds, so when I have time I will be back to read a lot more, Please do keep up the superb work.
узнать больше https://trip71.us/
This is a great blog. Thank you for the very informative post.
You have some helpful ideas! Maybe I should consider doing this by myself.
этот сайт retro casino
Узнать больше newretrocasino
Ищете советы от профессионалов по плетению корзин из лозы? Этот пост именно для вас!
Особенно понравился материал про Как выбрать идеальные ножи для резьбы по дереву.
Вот, делюсь ссылкой:
https://fixora.ru/%d0%ba%d0%b0%d0%ba-%d0%b2%d1%8b%d0%b1%d1%80%d0%b0%d1%82%d1%8c-%d0%bd%d0%be%d0%b6%d0%b8-%d0%b4%d0%bb%d1%8f-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
опубликовано здесь https://trip71.us/
выберите ресурсы retro casino
посетить сайт new retro
каталог new retro casino
Jump into disquietude! Stake peerless games at our casino – slots, blackjack, roulette & more. Attain successfully with full bonuses and loose spins. Join second & claim your well-received offer!
https://booming-casino.com/
Желание попробовать что-то иное это смело. Откройте работа инженером – высокая зарплата там легко найти позиции на стыке навыков — и вы удивитесь, сколько дверей открыто для тех, кто готов развиваться.
Подробнее retro casino
узнать больше new retro casino
нажмите здесь ретро казино
веб-сайте casino retro
перейти на сайт https://trip71.us
koyu gri renk hakk?ndaki bolumu tavsiye ederim. Link burada: https://evhobisi.com/articles/koyu-gri-renk-estetik-uygulama-alanlari/
Увлекательный мир лозоплетения ждёт вас! Присоединяйтесь к обсуждению лучших техник и приёмов.
Особенно понравился раздел про Как выбрать идеальный набор для каллиграфии.
Смотрите сами:
https://fixora.ru/%d0%bd%d0%b0%d0%b1%d0%be%d1%80-%d0%b4%d0%bb%d1%8f-%d0%ba%d0%b0%d0%bb%d0%bb%d0%b8%d0%b3%d1%80%d0%b0%d1%84%d0%b8%d0%b8/
Удачи вам в плетении и вдохновения от наших мастеров!
посмотреть на этом сайте ретро казино
Хорошо зарабатывать реально в самых разных отраслях. Сравните предложения: на работа кладовщиком – сегодня вы сами задаёте нижнюю планку, чтобы сразу видеть только то, что вас устроит.
узнать больше Здесь new retro casino
Whether commute time matters to you, employers are constantly hiring. Check out jobs – no staffing agency office, remote, and hybrid positions all in one place — and find the schedule and setup that actually fits your life.
веб-сайте https://slon10-cc.com
этот сайт newretrocasino
ссылка на сайт https://slon10-cc.com/
проверить сайт https://slon10-cc.com
Задумываетесь над плетением корзин? Узнайте, что советуют опытные мастера!
Между прочим, если вас интересует Фигурная резьба по дереву: от новичка до мастера, посмотрите сюда.
Вот, можете почитать:
https://fixora.ru/%d0%bc%d0%b0%d1%81%d1%82%d0%b5%d1%80-%d0%ba%d0%bb%d0%b0%d1%81%d1%81-%d0%bf%d0%be-%d1%84%d0%b8%d0%b3%d1%83%d1%80%d0%bd%d0%be%d0%b9-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d0%b5-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80/
Спасибо за внимание! Пусть ваше лозоплетение будет успешным и увлекательным!
другие https://slon10-cc.com
Подробнее здесь https://slon10-cc.com
узнать больше Здесь https://trip71.us/
продолжить https://slon10-cc.com
Главная https://slon10-cc.com/
Узнать больше https://slon10-cc.com
Unquestionably believe that which you said. Your favorite reason seemed to be on the net the easiest thing to be aware of. I say to you, I certainly get annoyed while people consider worries that they plainly don’t know about. You managed to hit the nail on the head. Will probably be back to get more. Thanks
нажмите https://slon10-cc.com/
посетить веб-сайт https://slon10-cc.com/
этот сайт https://slon10-cc.com/
узнать больше Здесь https://slon10-cc.com/
Если вам интересно, как мастера создают изящные короба из лозы, это место для вас!
Между прочим, если вас интересует Эксклюзивные техники резьбы по дереву: советы и тренды 2024, загляните сюда.
Ссылка ниже:
https://fixora.ru/%d1%80%d0%b5%d0%b4%d0%ba%d0%b8%d0%b5-%d1%82%d0%b5%d1%85%d0%bd%d0%b8%d0%ba%d0%b8-%d1%80%d0%b5%d0%b7%d1%8c%d0%b1%d1%8b-%d0%bf%d0%be-%d0%b4%d0%b5%d1%80%d0%b5%d0%b2%d1%83/
Следуйте советам профессионалов, и ваши корзины станут настоящими шедеврами.
Thank you for the good information, and please let me know on my site as well! 평택역 노래방
Salary transparency is a job seeker’s best friend. Stop wasting time on listings with no pay range. On delivery driver jobs – flexible schedule you’ll see hourly and annual rates side by side — so every application you send is worth sending.
@maorou_k8m
женская самооборона Эффективная самооборона требует регулярной отработки приемов до уровня мышечной памяти. Только так вы сможете сработать инстинктивно в нужный момент.
作为一部优秀的科幻,它不仅提供了全集的视听享受,更在推荐方面设立了新的标准。 影视平台
Nice post.Very useful info specifically the last part 🙂 Thank you and good luck.
Simply wish to say the frankness in your article is surprising.
доставка ликера новосибирск Надежная доставка алкоголя в Новосибирске работает для вашего удобства и хорошего настроения. Обращайтесь к нам, когда хотите провести время комфортно и весело.
It’s the best time to make some plans for the future and it is time to be happy. I’ve read this post and if I could I wish to suggest you some interesting things or tips. Maybe you can write next articles referring to this article. I wish to read even more things about it!
Продажа и одомашнивание кайта Slingshot в Минске оплата черещ Mellstroy Casino Оборудование Slingshot известно своей высокой износостойкостью в самых суровых условиях. Приобретайте надежные кайты в Минске для покорения водных стихий.
финансовые статьи Взаимосвязь «финансов и кредитов» требует понимания того, как ключевая ставка влияет на стоимость заемных денег. Когда вы понимаете механизмы экономики, вы принимаете решения более рационально.
Crypto OTC desk
земля под дачу Земля под дачу в живописном уголке Подмосковья ждет своих новых владельцев. У нас вы найдете уютные участки, где можно наслаждаться тишиной и природой в выходные дни.
https://bmlpro.ru/
земля у воды купить Мечтаете купить землю у воды с отличной инфраструктурой? Мы предлагаем проверенные участки, где можно построить уютный дом для круглогодичного проживания.
все санкции против России Следите за распределением нагрузки санкций по странам-инициаторам с помощью нашей системы. Мы обеспечиваем максимальную точность и наглядность.
разработка лендинга под ключ
More https://vc.ru/id3219783/2886181-kak-ya-obnovil-svoy-lichnyy-sayt-vizitku
участок под бизнес Выбирайте земельные участки в Подмосковье, сравнивая параметры и местоположение на карте. Мы делаем процесс выбора прозрачным, понятным и максимально быстрым.
создание сайта компании под ключ
More https://vc.ru/id3219783/2886181-kak-ya-obnovil-svoy-lichnyy-sayt-vizitku
участок московская область Создайте родовое поместье на участке под усадьбу, который мы поможем вам выбрать. Большая площадь и выгодное расположение — залог успеха вашего проекта.
ссылка на сайт трипскан вход
здесь трипскан вход
Quick pros:
+ Fast loading times
+ Works great on mobile
+ Easy navigation
+ Customer service responds quick
777 bit
пояснения https://trip75at.us
узнать больше https://trip75-at.cc
подробнее https://trip75-at.cc
https://bmlpro.ru/
https://primecasinoworld.com/how-to-get-1xbet-promo-code-1x200royal-in-2026/
https://www.freie-waehler-werdau.de/wp-content/pgs/beremennosty_zakanchivayuschayasya_abortom_4.html
веб-сайте trip75 at
земля под дачу Инвестиции в земельные участки — это понятный и прозрачный способ приумножения средств. Мы предлагаем землю с высокой ликвидностью в развивающихся районах области.
подробнее https://trip75at.us
madestone.ru Мы собрали и структурировали данные всех основных мировых центров принятия санкций. Наш сайт — это цифровая летопись ограничений, введенных с 2014 года.
каталог https://trip75-at.cc/
ссылка на сайт https://tripscans90.cc
в этом разделе сайт трипскан
продолжить tripscan
инвестиции в земельные участки Ищете надежный участок под ферму с возможностью расширения границ в будущем? У нас есть уникальные предложения для развития вашего фермерского хозяйства.
зайти на сайт трипскан
Нарколог на дом в Казани — это срочная медицинская помощь пациенту при запое, похмелья, интоксикации, абстинентного синдрома, наркотической ломки и других ситуациях, когда человеку сложно самостоятельно обратиться в клинику. Врач приезжает на дом, проводит осмотр, диагностику состояния, подбирает препараты, ставит капельница и дает рекомендации по дальнейшему лечению зависимости.
Выяснить больше – вызов нарколога на дом казань
посмотреть на этом сайте https://tripscans90.cc/
ссылка на сайт трипскан
https://browart.ru/services/kompleks/
Узнать больше https://tripscans90.cc/
проверить сайт трипскан вход
смотреть здесь https://trip75-at.cc/
юридическая помощь при ДТП Хабаровск Вызов комиссара в Хабаровске — это услуга оперативного выезда специалиста на место дорожно-транспортного происшествия. После звонка аварийный комиссар прибывает на место аварии и помогает водителям правильно оформить все документы, зафиксировать повреждения автомобилей и составить схему ДТП.
посетить веб-сайт trip75 at
взгляните на сайте здесь https://tripscans90.cc
Смотреть здесь trip75 co
такой https://tripscans90.cc
опубликовано здесь https://tripscans90.cc/
нажмите здесь https://trip75-at.cc
https://bvf.ru/forum/showthread.php?t=985965&page=207
KRAKEN Market в даркнете
Для тех, кто ищет стабильный способ взаимодействия с ресурсами даркнета, Кракен считается одной из самых авторитетных торговых площадок в сегменте даркнета. Кракен Маркет выделяется на фоне конкурентов стабильностью работы и доверием сообщества. В данном материале мы подробно разберем, как правильно получить доступ к ресурсу через [url=https://krakenlinkc.cc]ВХОД[/url], какие методы защиты необходимо использовать и как обеспечить максимальную анонимность при совершении сделок.
Безопасность в даркнете начинается с правильной настройки инструментов доступа. Если вы новичок, то данный гайд поможет вам избежать типичных ошибок, которые могут привести к потере данных или средств.
Ссылка на Clearnet ресурс
Использование ресурсов в открытом сегменте сети (Clearnet) является одним из способов взаимодействия с Кракен Маркет для тех, кому сложно работать напрямую с Tor. Обычный интернет предоставляет более привычный интерфейс взаимодействия, но сопряжен с особыми правилами безопасности. Использование стандартного интернета требует повышенного внимания к защите персональных данных.
Технически это реализуется через проксирование запросов, что позволяет пользователям использовать более привычные инструменты навигации и интерфейсы. Зеркальные страницы могут обновляться чаще, чем основной адрес, поэтому важно использовать актуальные данные. Для того чтобы попасть на площадку через такие методы, вам потребуется получить проверенную ссылку: [url=https://krakenlinkc.cc]ВХОД[/url].
Инструкция по регистрации через альтернативные ссылки
После перехода по ссылке на ресурс Clearnet, вам потребуется создать уникальный логин и надежный пароль… Сначала откройте страницу регистрации, используя актуальную ссылку из вашего доверенного источника. Заполните поля регистрации, используя данные, которые не связаны с вашей реальной личностью. После заполнения основных полей, система может запросить подтверждение через электронную почту или другие средства связи. Не забывайте активировать дополнительную защиту аккаунта сразу после регистрации. Система безопасности Кракен Маркет требует внимательного отношения к защите личного кабинета.
Пользователи также могут использовать альтернативные ссылки, если основной адрес временно недоступен. Например, такие адреса как krab1.cc, krab2.at или krab3.at могут служить временными точками входа.
Специфика работы через VPN и Tor
Использование VPN — это критически важный элемент безопасности при работе с любыми маркетплейсами. Выбирайте проверенных провайдеров, которые не собирают данные о ваших действиях в сети.
Порядок действий имеет значение: сначала создается защищенный туннель, затем запускается браузер. Это предотвращает утечку вашего реального местоположения при инициализации узлов Tor.
Разные пользователи выбирают разные инструменты в зависимости от своих потребностей и уровня риска. Прокси-серверы могут помочь скрыть IP, но они не обеспечивают такого уровня шифрования, как Tor.
Доступ через браузер может быть удобен для тех, кто уже имеет опыт работы с даркнетом. Регулярное обновление браузера также является важным аспектом безопасности.
Как обеспечить анонимность при входе
Безопасность на Кракен Маркет напрямую зависит от ваших личных действий и дисциплины. Это включает в себя все действия, направленные на сокрытие вашей личности и предотвращение утечки данных.
Начните с использования свежей установки Tor Browser, избегая любых вредоносных плагинов. Установка дополнительных расширений в Tor Browser часто является причиной утечки метаданных. Очистка данных после каждой сессии помогает избежать хранения истории ваших действий.
Используйте встроенные инструменты проверки в Tor Browser или сторонние сервисы для диагностики сети. Регулярные тесты на утечки — это признак опытного и осторожного пользователя.
Для подтверждения подлинности сообщений всегда проверяйте целостность PGP-подписи, если она предоставляется. Освоите работу с ключами — это сэкономит вам много ресурсов и защитит от обмана.
Если вы решите зайти на Кракен Маркет с телефона, будьте предельно осторожны. Не используйте свои личные основные аккаунты на мобильных устройствах для доступа к даркнет-ресурсам.
Инструкция по созданию профиля
Чтобы начать пользоваться услугами Кракен Маркет, вам нужно пройти процедуру регистрации. Сначала необходимо выбрать уникальный логин, который не связан с вашей реальной личностью. Используйте сложные и уникальные пароли, которые не встречаются в других сервисах.
После создания логина и пароля вам потребуется подтвердить свой адрес электронной почты. Убедитесь, что ваша почта защищена двухфакторной аутентификацией. Регистрация через обычные почтовые сервисы типа Gmail или Outlook может быть небезопасной.
На Кракен Маркет рекомендуется использовать дополнительные методы защиты, такие как 2FA. Используйте аппаратные ключи безопасности или приложения-аутентификаторы. Помните, что наличие премиум-аккаунта не освобождает вас от необходимости соблюдать базовые правила безопасности.
Теперь вы можете ознакомиться с правилами торговли и ассортиментом магазина. Не забывайте изучить правила сообщества, чтобы избежать блокировок. Сразу после регистрации рекомендуется ознакомиться с интерфейсом и научиться пользоваться внутренними инструментами сайта.
Почему стоит выбрать Кракен Маркет
Почему именно Кракен Маркет стоит выбрать для ваших покупок?Пользователи выбирают Кракен благодаря его репутации и надежности. Во-первых, это огромный ассортимент товаров из самых разных категорий.
Во-вторых, высокая ликвидность и скорость проведения транзакций. Это критически важно для тех, кто ценит свое время и хочет получить товар в кратчайшие сроки.
Кракен Маркет инвестирует значительные ресурсы в обеспечение анонимности своих клиентов. Площадка регулярно обновляет свои протоколы защиты от взломов и атак.
На Кракен Маркет существует четкая система арбитража и решения споров. Наличие правил сообщества позволяет минимизировать риск столкновения с недобросовестными продавцами.
Вы можете быть уверены в качестве товара благодаря накопленным отзывам. Наличие системы рейтинга позволяет формировать безопасную торговую среду.
– – – – – – – – – – Ключевые слова
кракен площадка каталог
список ссылок кракен
кракен в телеграмме ссылка
кракен интернет магазин
kraken официальный сайт
какая ссылка на кракен
кракен ссылка
кракен ссылка маркет
кракен ссылки актуальные 2026
кракен шоп ссылка
новая ссылка кракен
ссылка на кракен официальный
kraken даркнет рынок ссылки
kraken даркнет ссылка
kraken сайт
актуальные ссылки на кракен
кракен ссылка бот
кракен ссылки td
рабочая ссылка кракен
ссылка кракен магазин
ссылка кракен сегодня
кракен сайт маркетплейс
кракен бот
кракен регистрация
кракен сайт зеркало
кракен сайт маркетплейс — расширенный поиск предложений
кракен торговая площадка
кракен переходник ссылка
кракен список рабочих ссылок
кракен ссылка onion
ссылка кракен зеркало 2026
ссылка на кракен сс
ссылка на кракен телеграм
ссылка на кракен тор
кракен маркет шоп
участок у леса Купить участок в Московской области
каталог https://tripscans90.cc
проверить сайт https://trip75-at.cc/
Смотреть здесь https://trip75-at.cc
Подробнее https://tripscans90.cc/
можно проверить ЗДЕСЬ https://trip75-at.cc/
这部日剧作品以其大结局的特色和下载体验获得了广泛关注,是影视爱好者的必看之选。 立即高清播放
читать https://trip75-at.cc
https://crnogorskiportal.me/sadrzaj/19413
участок у леса Купить участок в Московской области
пояснения trip75 co
Update: still using Aradabet after 3 months and honestly its been pretty consistant, no major problems, customer service responded quick when i had a question, just wanted to say its holding up well for me
кликните сюда сайт трип скан
Источник трипскан официальный сайт
这是一部不容错过的脱口秀作品,它以剧终的质量和独特的剧透风格吸引了众多观众。 免费日剧在线
участок под ферму Купить участок в Московской области
Перейти на сайт trip75 co
https://bszizifus.at
Подробнее https://trip75-at.cc/
https://doc.asta.rwth-aachen.de/s/1kbRGn-c4c
https://www.ted.com/profiles/51812889
https://agroclick.org/blog/cannabis-planta-prodigiosa
опубликовано здесь tripskan
https://tripscan79.at
другие трип скан
https://postimg.cc/4mQ0ZwRP
посетить сайт трип скан вход
Следующая страница trip75 co trip75 at
узнать tripscan зеркало
перенаправляется сюда трип скан вход
интернет трип скан официальный сайт
这是一部不容错过的1080P作品,它以4K的质量和独特的付费看风格吸引了众多观众。 在线影院app
пояснения tripscan официальный
Смотреть здесь сайт трип скан
посетить сайт трипскан сайт вход
смотреть здесь сайт трипскан
страница сайт трипскан
https://tip75.at
другие tripscan вход
нажмите здесь tripscan вход
каталог трип скан
нажмите здесь сайт трип скан
перейти на сайт трипскан официальный сайт
нажмите, чтобы подробнее трипскан официальный сайт
можно проверить ЗДЕСЬ tripscan сайт
посетить сайт сайт трип скан
здесь tripscan официальный сайт
нажмите, чтобы подробнее трипскан официальный сайт
нажмите, чтобы подробнее трип скан официальный
Главная tripscan вход
нажмите здесь tripscan официальный
нажмите, чтобы подробнее tripskan
Главная трипскан официальный
нажмите здесь трипскан сайт вход
сайт tripscan официальный сайт
продолжить трипскан вход
кликните сюда tripscan сайт
найти это трипскан официальный
выберите ресурсы трип скан официальный
Смотреть здесь трип скан
взгляните на сайте здесь трипскан сайт вход
Источник трипскан вход
ссылка на сайт трипскан ссылка
ссылка на сайт сайт трипскан
выберите ресурсы tripscan вход
посмотреть на этом сайте трипскан официальный сайт
интернет трип скан
нажмите, чтобы подробнее трип скан вход
нажмите здесь tripscan официальный
подробнее трипскан вход
узнать больше Здесь трипскан ссылка
каталог трипскан сайт вход
узнать больше Здесь tripscan официальный
веб-сайте tripscan официальный сайт
посетить сайт трип скан вход
https://bslsp.at
пояснения трип скан официальный
перенаправляется сюда трипскан сайт вход
нажмите здесь трипскан официальный
выберите ресурсы трипскан ссылка
этот контент трип скан
зайти на сайт трип скан вход
Смотреть здесь трипскан официальный
нажмите здесь сайт трип скан
узнать больше Здесь tripskan
Подробнее здесь трипскан вход
Перейти на сайт трипскан вход
нажмите трип скан официальный сайт
на этом сайте трип скан официальный
Подробнее здесь трипскан сайт вход
пояснения tripscan официальный сайт
смотреть здесь трип скан официальный
Подробнее здесь трипскан ссылка
Продолжение сайт трип скан
на этом сайте tripscan сайт
https://bs2web10.at
продолжить tripskan
найти это tripscan официальный
нажмите здесь трипскан сайт вход
узнать больше Здесь трип скан вход
посмотреть на этом сайте трипскан сайт вход
нажмите, чтобы подробнее трип скан
Читать далее tripscan официальный сайт
Главная tripscan официальный сайт
посетить сайт трип скан официальный сайт
смотреть здесь трипскан официальный
в этом разделе трипскан ссылка
этот контент трипскан официальный сайт
зайти на сайт трип скан вход
узнать больше трип скан
перейдите на этот сайт tripscan сайт
Подробнее трип скан вход
ссылка на сайт трипскан официальный сайт
узнать больше Здесь сайт трипскан
https://issuu.com/codepromo1xbet456
другие трип скан
Подробнее tripscan вход
сайт трип скан вход
Узнать больше tripscan официальный
перейти на сайт tripscan вход
зайти на сайт tripscan официальный сайт
здесь tripscan вход
интернет трип скан вход
https://www.gtclassiche.com/de/news/7_Aletta-parasole-per-Dino-Spider.html
посмотреть на этом сайте vodka bet casino
посмотреть на этом сайте vodka bet casino
Подробнее водкабет официальный сайт
посмотреть на этом сайте vodka bet vodkabet
продолжить водкабет официальный сайт
Узнать больше зеркало водка бет
Перейти на сайт vodka bet casino
посетить сайт vodka bet vodkabet
здесь vodkabet водкабет казино
веб-сайт vodka bet vodkabet
ссылка на сайт vodkabet водкабет казино
Смотреть здесь vodka bet vodkabet
https://www.spatial.io/@betxvip12026
https://45vargashi.ru/
зайти на сайт vodkabet водкабет казино
Смотреть здесь vodkabet водкабет казино
посетить сайт vodka bet vodkabet
узнать vodka bet vodkabet
https://fmiguild.org/
Подробнее здесь водкабет официальный сайт
avukat seo
такой водкабет официальный сайт
здесь vodkabet водкабет казино
ссылка на сайт водкабет казино
веб-сайт водкабет казино
опубликовано здесь vodka bet casino
ссылка на сайт vodkabet водкабет казино
посетить веб-сайт vodka bet casino
https://allforwater.ru/
Смотреть здесь vodka bet vodkabet
выберите ресурсы зеркало водка бет
Читать далее водкабет казино
найти это vodkabet водкабет казино
Узнать больше водкабет казино
найти это водкабет официальный сайт
продолжить водкабет казино
веб-сайте vodkabet водкабет казино
веб-сайте водкабет официальный сайт
нажмите здесь водкабет казино
подробнее здесь vodka bet casino
Смотреть здесь водкабет казино
опубликовано здесь vodka bet vodkabet
этот сайт зеркало водка бет
здесь vodka bet vodkabet
Смотреть здесь vodka bet casino
посмотреть на этом сайте vodka bet vodkabet
узнать зеркало водка бет
http://www.facebook.com/stakebonuscalculator/ Try the Stake Bonus Calculator for quick bonus calculations.
Узнать больше vodka bet vodkabet
Смотреть здесь зеркало водка бет
веб-сайте водкабет официальный сайт
https://hedgedoc.stusta.de/s/UlvSJzpTG
https://lagaulemortuacienne.fr/media/pgs/linscription_code_promo_1xbet.html
этот сайт vodka bet vodkabet
ссылка на сайт vodka bet vodkabet
такой vodkabet водкабет казино
Подробнее здесь водкабет казино
Читать далее vodka.bet
программа 1с купить для ип на усн обслуживание 1с техническая поддержка сколько стоит
смотреть здесь vodka bet casino
Источник зеркало водка бет
другие зеркало водка бет
ссылка на сайт vodkabet водкабет казино
зайти на сайт водкабет официальный сайт
перейдите на этот сайт vodka bet vodkabet
https://therockpit.net/wp-content/pages/melbet_free_promo_code_enter__.html
ссылка на сайт vodka bet casino
узнать vodka bet casino
сюда зеркало водка бет
Продолжение водкабет казино
посмотреть на этом сайте зеркало водка бет
другие водкабет официальный сайт
Подробнее здесь водкабет официальный сайт
http://www.facebook.com/stakeminespredictor/ Learn more about the Stake Mines Predictor here.
сюда vodka bet vodkabet
Перейти на сайт vodka.bet
Kraken Market Darknet
Для тех, кто ищет надежный способ взаимодействия с ресурсами даркнета, Многие пользователи отдают предпочтение именно Кракен Маркет из-за его многолетней истории. Она зарекомендовала себя как площадка с высоким уровнем защиты данных и широким ассортиментом. В данном материале мы подробно разберем, как правильно получить доступ к ресурсу через ВХОД, какие методы защиты необходимо использовать и как обеспечить максимальную анонимность при совершении сделок.
Для успешного взаимодействия с Кракен Маркет необходимо соблюдать ряд технических правил. Если вы новичок, то данный гайд поможет вам избежать типичных ошибок, которые могут привести к потере данных или средств.
Альтернативные методы доступа
Для тех, кто ищет альтернативные пути, существует доступ через Clearnet, который позволяет взаимодействовать с платформой вне специфических .onion-адресов… Такой метод доступа может быть удобен для выполнения определенных операций, однако он требует осознания специфических технических нюансов. Использование стандартного интернета требует повышенного внимания к защите персональных данных.
Технически это реализуется через проксирование запросов, что позволяет пользователям использовать более привычные инструменты навигации и интерфейсы. Зеркальные страницы могут обновляться чаще, чем основной адрес, поэтому важно использовать актуальные данные. Пользователям необходимо искать актуальные рабочие ссылки, чтобы гарантированно попасть на активную страницу.
Пошаговый процесс создания аккаунта
Для успешной регистрации через обычный интернет достаточно следовать инструкции на странице входа: укажите необходимые данные и подтвердите регистрацию. Начните с перехода на официальный ресурс через Clearnet-ссылку, чтобы увидеть форму создания профиля. Заполните поля регистрации, используя данные, которые не связаны с вашей реальной личностью. Для завершения регистрации может потребоваться подтверждение данных через дополнительные каналы. Для обеспечения максимальной безопасности профиля обязательно настройте 2FA сразу после создания учетной записи. Система безопасности Кракен Маркет требует внимательного отношения к защите личного кабинета.
Доступ к ресурсу можно получить через различные зеркала сайта. Зеркала позволяют получить доступ к интерфейсу площадки без использования сети Tor, но требуют повышенной осторожности.
Технические нюансы входа на сайт
VPN-сервисы обеспечивают шифрование трафика на уровне вашего устройства. Качество VPN напрямую влияет на вашу анонимность в даркнете.
Порядок действий имеет значение: сначала создается защищенный туннель, затем запускается браузер. Некоторые пользователи совершают ошибку, включая Tor без предварительного использования VPN.
Существуют также дополнительные методы обеспечения анонимности, такие как использование прокси-серверов. Для высокорискованных сделок лучше придерживаться стандартных протоколов безопасности.
Использование браузера является классическим методом взаимодействия с площадкой. Однако помните, что любой вход в интернет оставляет следы, поэтому конфигурация вашего браузера должна быть идеальной.
Протоколы безопасности для пользователей
Безопасность на Кракен Маркет напрямую зависит от ваших личных действий и дисциплины. Основы OPSEC должны стать вашей привычкой при каждом посещении сайта.
Начните с использования свежей установки Tor Browser, избегая любых вредоносных плагинов. Используйте браузер в стандартном состоянии, не меняя его конфигурацию без необходимости. Очистка данных после каждой сессии помогает избежать хранения истории ваших действий.
Очень важно следить за тем, чтобы ваш DNS не утекал во время сессии. Никогда не пренебрегайте проверкой сетевой связности.
Проверка подписей защищает вас от фишинга и попыток общения со стороны мошенников. Никогда не доверяйте сообщениям без соответствующей подписи в личной переписке.
Безопасность мобильных устройств также требует особого внимания при работе с даркнетом. Избегайте установки непроверенных приложений и всегда следите за разрешениями, которые они запрашивают.
Инструкция по созданию профиля
Создание аккаунта на площадке требует внимания к деталям и соблюдения правил анонимности. Сначала необходимо выбрать уникальный логин, который не связан с вашей реальной личностью. Используйте сложные и уникальные пароли, которые не встречаются в других сервисах.
Используйте анонимные почтовые сервисы для регистрации, чтобы не раскрывать свои личные данные. Убедитесь, что ваша почта защищена двухфакторной аутентификацией. Регистрация через обычные почтовые сервисы типа Gmail или Outlook может быть небезопасной.
На Кракен Маркет рекомендуется использовать дополнительные методы защиты, такие как 2FA. Используйте аппаратные ключи безопасности или приложения-аутентификаторы. Помните, что наличие премиум-аккаунта не освобождает вас от необходимости соблюдать базовые правила безопасности.
После завершения регистрации вы получите доступ к функционалу площадки, включая поиск товаров и личные сообщения. Не забывайте изучить правила сообщества, чтобы избежать блокировок. Сразу после регистрации рекомендуется ознакомиться с интерфейсом и научиться пользоваться внутренними инструментами сайта.
Особенности и достоинства ресурса
Почему именно Кракен Маркет стоит выбрать для ваших покупок?Существует множество причин, по которым эта площадка лидирует в своем сегменте. Ассортимент Кракен считается одним из самых полных в даркнете.
Высокая активность пользователей обеспечивает быстрый оборот товаров и средств. Система платежей Кракен оптимизирована для обеспечения бесперебойной работы.
Безопасность сделок на этой платформе находится на высшем уровне. Ваши данные защищены лучшими технологиями доступными в даркнете.
Поддержка пользователей и наличие прозрачных правил делают процесс покупки более предсказуемым. Наличие правил сообщества позволяет минимизировать риск столкновения с недобросовестными продавцами.
Наконец, Кракен Маркет имеет одну из самых стабильных систем репутации продавцов. Изучайте отзывы перед каждой покупкой, чтобы избежать мошенничества.
– – – – – – – – – – Ключевые слова
кракен площадка каталог
список ссылок кракен
кракен в телеграмме ссылка
кракен интернет магазин
kraken официальный сайт
какая ссылка на кракен
кракен ссылка
кракен ссылка маркет
кракен ссылки актуальные 2026
кракен шоп ссылка
новая ссылка кракен
ссылка на кракен официальный
kraken даркнет рынок ссылки
kraken даркнет ссылка
kraken сайт
актуальные ссылки на кракен
кракен ссылка бот
кракен ссылки td
рабочая ссылка кракен
ссылка кракен магазин
ссылка кракен сегодня
кракен сайт маркетплейс
кракен бот
кракен регистрация
кракен сайт зеркало
кракен сайт маркетплейс — расширенный поиск предложений
кракен торговая площадка
кракен переходник ссылка
кракен список рабочих ссылок
кракен ссылка onion
ссылка кракен зеркало 2026
ссылка на кракен сс
ссылка на кракен телеграм
ссылка на кракен тор
кракен маркет шоп
на этом сайте вотка бет
аренда жилья на самуи Бюджетная аренда квартиры на Самуи позволяет разумно тратить деньги, оставив больше средств на развлечения и путешествия по острову. Выбирайте функциональные студии, где есть все необходимое для проживания.
Узнать больше водкабет
https://jobs.siliconflorist.com/employers/4233830-1win-1win2026vip-500
сюда vodka.bet
Everything for Minecraft http://www.topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Наш центр в Казани оказывает помощь круглосуточно: врач приезжает по адресу, проводит диагностику, оценивает состояние пациента, подбирает препараты и ставит капельницу. Вывод из запоя на дому помогает снять интоксикацию, уменьшить симптомы абстиненции, восстановить водно-солевой баланс, снизить тревожность и вернуть человека к более стабильной форме. В каждом случае врач учитывает возраст пациента, стаж алкоголизма, длительность запоя, наличие хронических заболеваний и реакцию на лекарства.
Детальнее – помощь вывод из запоя в казани
https://www.happycampersmontessori.com/profile/ashilkelley5b75x69751/profile
https://www.dropbox.com/scl/fi/q58oj28mdnfihdf4hdxfo/C-digo-Promocional-de-1xBet-2026_-1X200NEW-130-Bienvenida.paper?rlkey=ljk5ehd2nc6czgy8yua1hcpty&st=pu7aouka&dl=0
пояснения вотка бет
зайти на сайт vodka bet casino
сайт зеркало водкабет
https://www.fisb.it/media/pages/?meilleur_code_promo_1xbet_bonus_bienvenue.html
узнать больше vodka bet
在众多历史纪录片中脱颖而出,这部作品凭借蓝光的品质和精彩的推荐内容赢得了大量粉丝。 流畅观看app
каталог vodkabet водкабет казино
читать vodkabet водкабет казино
узнать больше Здесь vodka bet casino
поиск управленческих кадров Магнум Хант Экзекьютив Серч – российское агентство по executive search, специализирующееся на подборе топ-менеджеров, членов советов директоров и директоров холдингов исключительно для крупнейших компаний и холдингов. Компания работает на рынке с 1995 года (как часть Morgan Hunt, с 2019 – под брендом Magnum Hunt). Офис в Москве, экспертиза по всем секторам экономики России и СНГ. Команда опытных консультантов обеспечивает прямой поиск и глубокую оценку кандидатов под стратегические цели бизнеса .
песни Слушать музыку — это искусство, требующее внимания к деталям, оттенкам звука и настроению исполнителя. На vk.ru/osoznan1982odin представлены композиции, которые помогут вам отточить этот навык восприятия.
сайт зеркало vodka bet
можно проверить ЗДЕСЬ водка бет
узнать больше Здесь водкабет казино
Источник зеркало водка бет
нажмите здесь водкабет официальный сайт
здесь водкабет официальный сайт
посмотреть на этом сайте vodka bet casino
Подробнее здесь вотка бет
Читать далее vodka bet
Been using dream catcher game for a couple weeks now and I really like how straightforward everything is, no complicated rules or confusing menus. My only minor gripe is that sometimes I wish there were a few more customization options available, but overall its been a solid way to spend downtime.
сюда зеркало водкабет
Читать далее vodka bet casino
перейдите на этот сайт зеркало vodka bet
сайт vodkabet
каталог vodka.bet
Источник vodkabet
здесь vodka.bet
взгляните на сайте здесь vodka bet